内容
介绍
现在您已经选择了无人机的所有主要部件,您可以开始组装了。本指南将涵盖组装多旋翼无人机时的常见错误,以及一些有用的调整技巧。本课不包括相机/FPV 系统、远程设备或其他配件等项目(我们将在第 7 课中介绍)。
您在此阶段必须拥有的组件:
- 框架(购买或手工制作)
- 电机、电调、螺旋桨、电池、充电装置
- 配电板/线束
- 飞行控制器和通信装置(建议使用无线电控制)

推进
为实现本课的目标,您的无人机的推进系统将包括以下组件:
- 电机
- ESC
- 配电(板或线束)
- 电池
- 飞行控制器
请注意,螺旋桨未列出。在这个阶段不要安装螺旋桨!主要螺丝将仅在第 6 课中连接。由于这是您的第一架无人机,我们建议在将所有东西安装到框架上之前先进行“无框架”电气连接;以检查所有连接并消除已识别的故障。
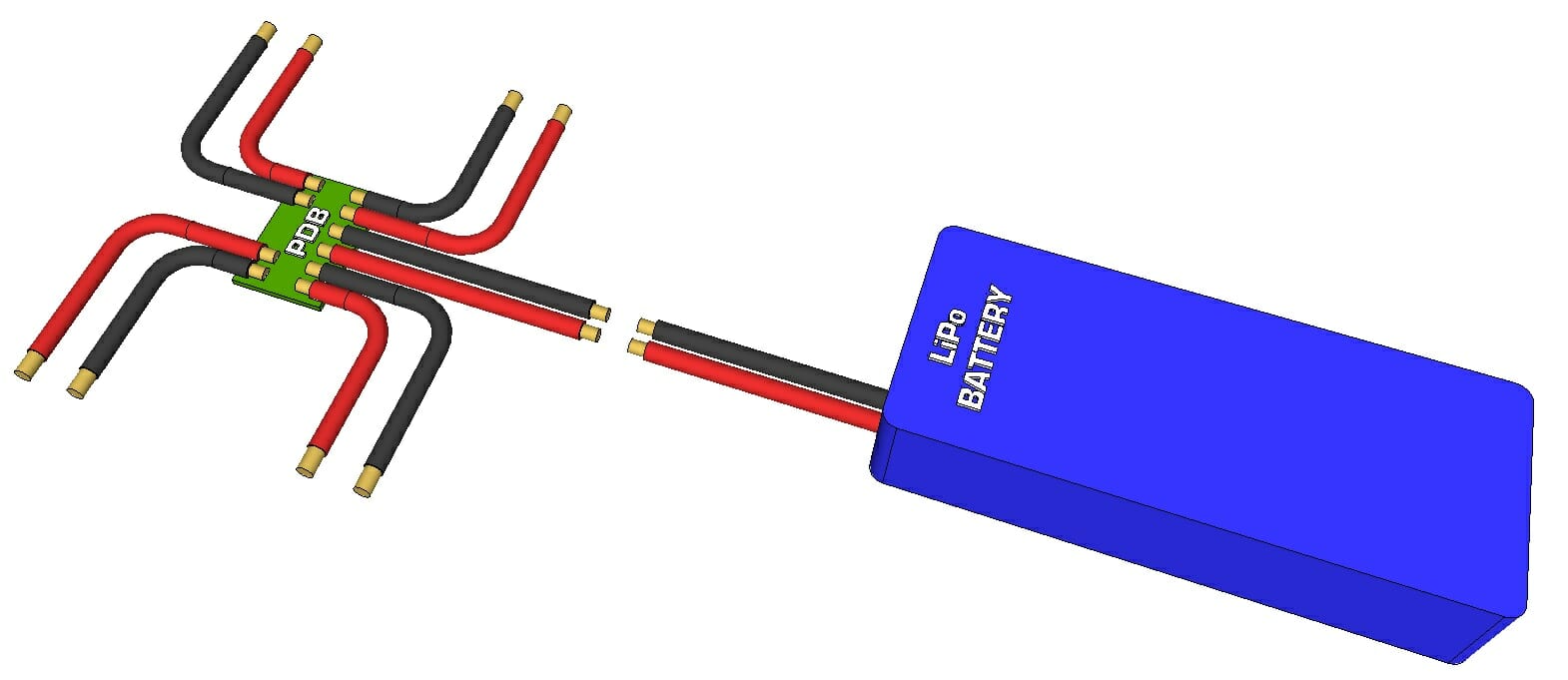
电池。配电
如果电池和配电系统的连接器类型相同,则它们之间的连接应该相对简单。如果是,则继续下一步。如果连接器不同,则在任何情况下都不要切断电池线以分离连接器;这会导致短路和令人不快的电击!相反,您可以拿起一个适配器并在电池上的连接器和配电板上的连接器之间使用它。另一种选择可能是寻找与电池连接器匹配的连接器,然后购买;然后从电源分配器上剪下现有的连接器并焊接购买的替换件,首先确保正极和负极引脚之间没有连接。
需要注意的是,大多数多旋翼无人机没有开/关开关,因此通过将主电池与电源分配器连接器连接和断开来提供和断开电源,因此它们的连接器必须牢固固定,电线/焊点与热缩管和/或电工胶带绝缘良好。
在继续之前,断开蓄电池与配电器的连接。
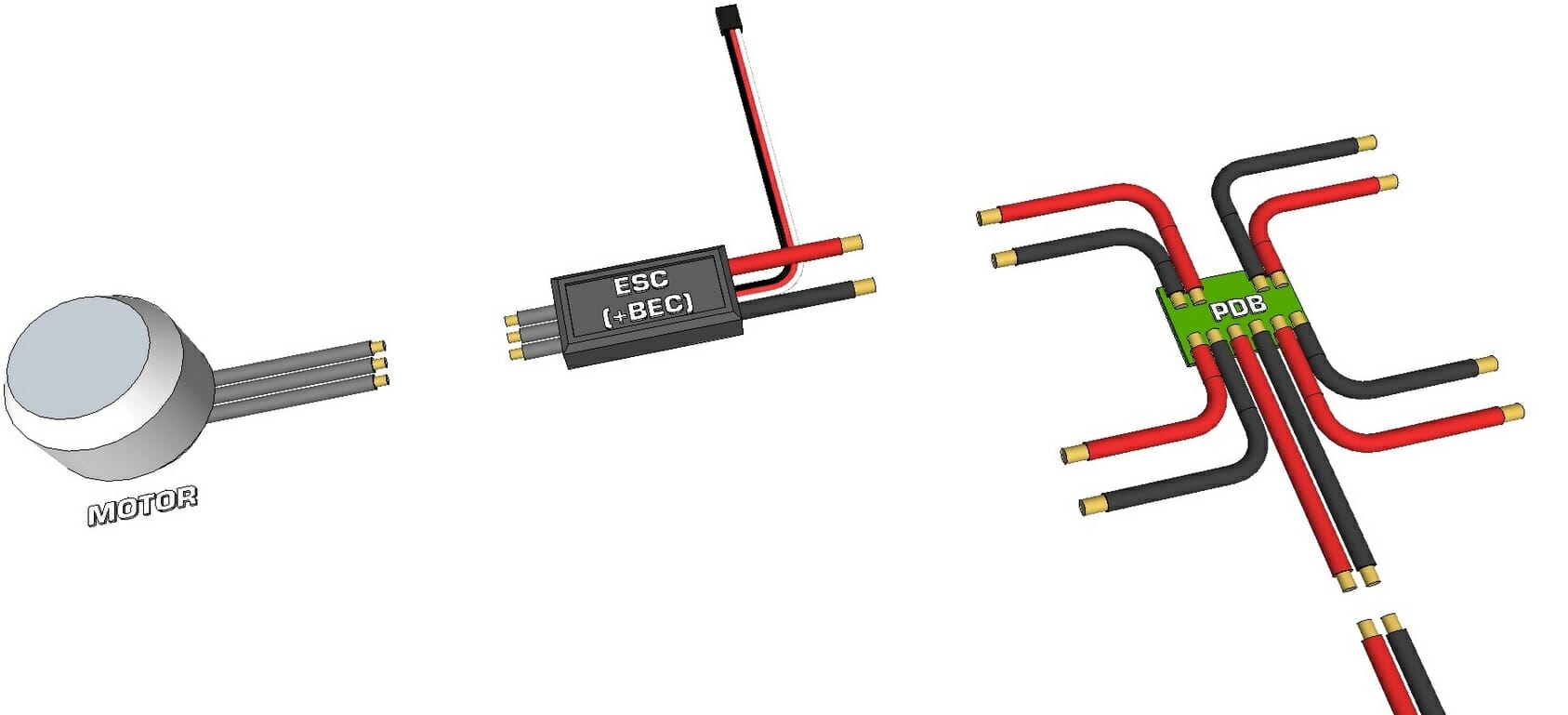
马达。电调。配电
配电板 (PDP) 或有线配电主要用于将电源从主电池分配到每个 ESC。电压按“原样”提供给 ESC,因此无需增加(增加)或减少(减少)电压。如果你的无人机有四个电机,那么你应该有四个电调,因此你的配电板/电线分配最终应该将主电池分成四个连接。如果您的 PRP 有六个连接,并且您正在构建一个四轴飞行器,那么您根本不需要连接最后两个。如果您正在构建六轴飞行器,您的 PDP 应将电源从主电池分配到六个连接。电调包括以下电线:
- 一根 3 线 0.1 英寸带 R/C 连接器,其中黑色针脚通常接地,红色针脚提供 5V 输出(通过 BEC(53) * ) 和黄色/白色是信号输入。
- 三根单独的电线连接到无刷直流电机上的三根电线(通常随附已焊接或随附的母子弹头连接器)。
- 两个用于将电池连接到 PDB 的输入连接器(有些包括带焊接的焊接连接器,有些包括在内,有时根本没有)。
*电调通常具有内置电池消除电路(或 BEC),可将主电池电压转换为 5V 为接收器和飞行控制器供电。 5V 通常通过 ESC 的 RC 连接器(通常是中心/红色引脚)提供。您只需要一个 BEC 即可为飞控供电。
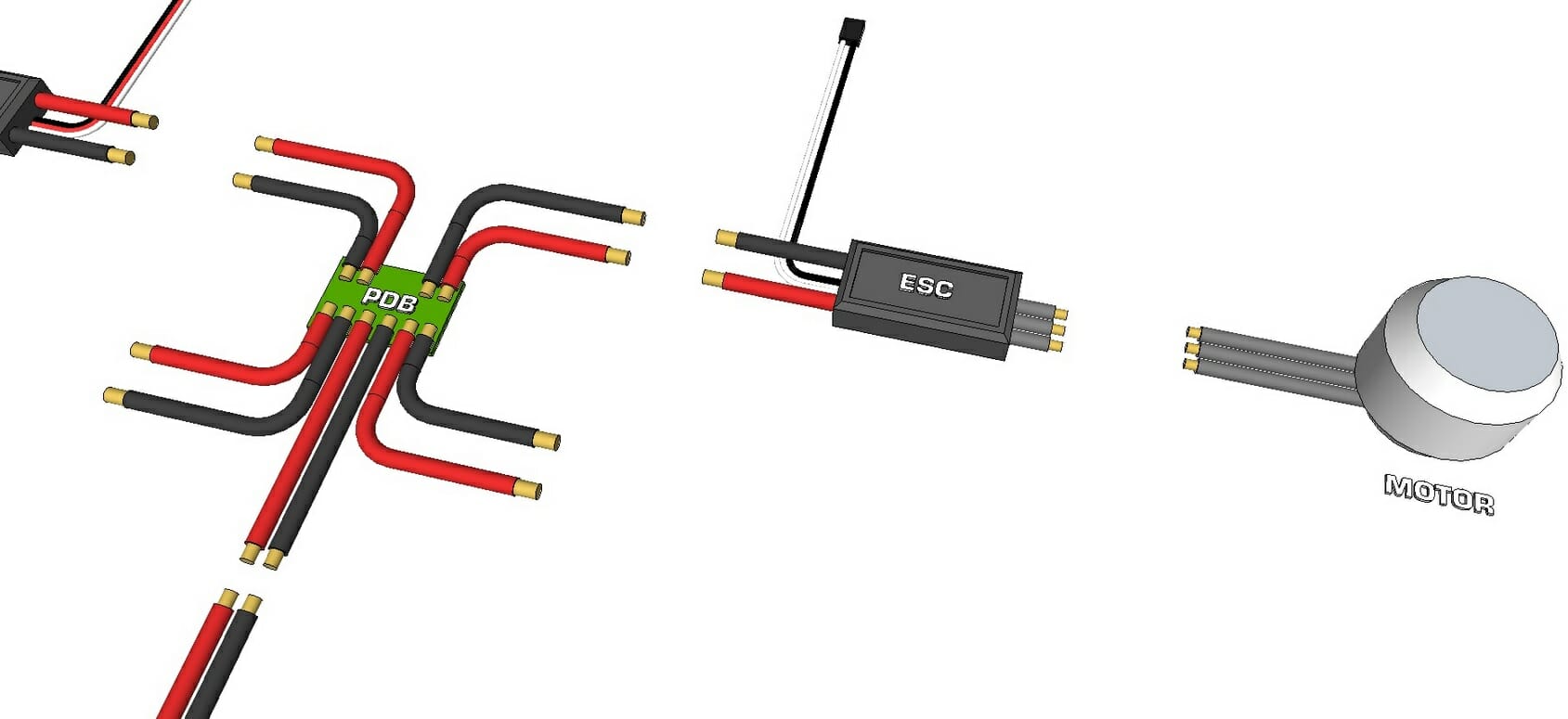
如果配电板使用的连接器与电调或电池上的连接器不匹配,则需要购买适配器(适配器),或购买新的连接器并在 ESC 或 PRP 上替换它们。优势仍然在于配电板,其连接器与电池和电调的连接器相匹配。大多数情况下,无人机的锂聚合物电池可以有 DEANS 连接器XT60EC3
如果您想为其他低电流电子设备(LED 照明、吊灯等)供电,但配电板上没有备用连接,您可以使用电池充电电缆。白色充电连接器通常有一个接地引脚和一个用于 LiPo 电池组件中使用的每个电芯(1S、2S、3S 等)的引脚。尽管该连接器实际上仅用于为电池充电,但它可以从每个引脚提供 3.7V 输出电压,并可用于为线束或 LED 等低电流电子设备供电。
- 从巡航控制的每个 3 针 R/C 连接器上拆下红色导线,除了一个。建议您以这样的方式执行此操作,以便在必要时始终可以将它们重新插入。用电工胶带包裹每根排除线的末端或使用热缩管进行绝缘,以便以后它们不会与其他电子设备接触。唯一未触及的红线将为装配中使用的飞行控制器供电。
- 将每个电调的两根电源线连接到配电盘,确保红线接正极(),黑线接负极(-)。
- 如果您使用的配电板有自己的 R/C 连接器,那么在这种情况下,您需要将每个 ESC 的 R/C 引脚连接到该板上的 R/C 连接器或将它们直接连接到飞行控制器。
- 将三个电机连接器中的每一个连接到三个 ESC 连接器。目前,这些连接器的连接顺序并不重要(如果影响旋转方向,稍后将根据需要进行更正)。
请注意,如果您决定在此阶段移除或隐藏接线,您可能需要根据第 6 课中描述的步骤访问某些连接,特别是交换电调和电机之间的连接,使电机以相反的方向旋转。

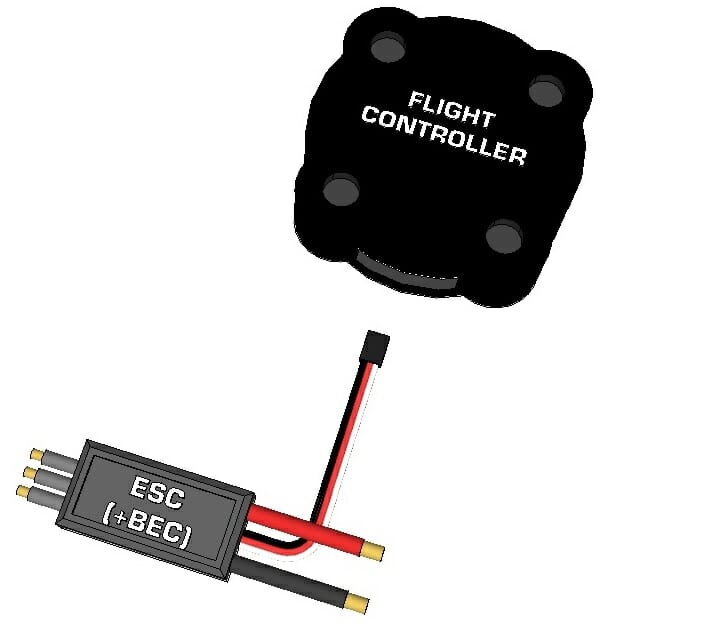
电调。飞行控制器。
您现在可以将巡航控制器的 R/C 输入连接到飞行控制器。您选择的飞行控制器应该有一个图表,显示哪些控制器引脚连接到多旋翼组件的电机。此图还应显示每个电机的旋转方向,但同样,您现在不需要考虑方向。
- 详见PC机使用说明书中电机/电调与飞控的连接图。
- 将每个电调的R/C连接器连接到飞控对应的引脚上,确保地线(通常为黑色)连接到飞控的接地引脚和信号引脚(白色或黄色)) 连接到飞控上的信号引脚...
- 只有一个 RC 连接器仍具有红色(电源)引脚。
通讯
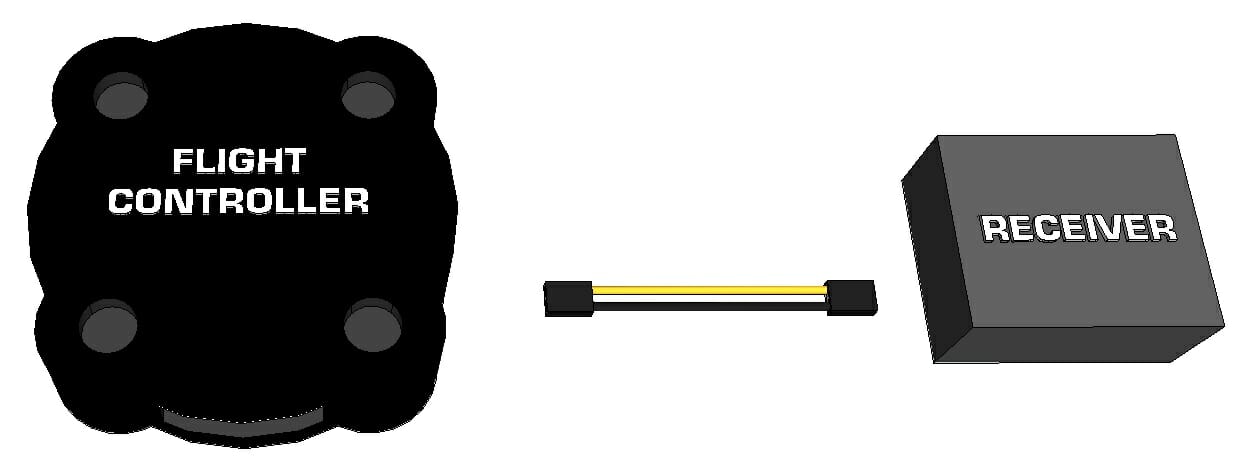
接收器。飞行控制器。
假设在本课中您选择了无线电控制作为输入设备。如需使用WiFi、蓝牙或其他输入方式,请阅读飞控手册并搜索串口输入;本节将介绍如何/在何处将串行输入设备连接到飞控。您很可能需要找到并连接无线设备和发射器之间的发射 (Tx)、接收 (Rx)、电压 (5V) 和 GND 引脚,从而允许 Rx 从一个到另一个的 Tx,反之亦然。
您的遥控发射器必须配备合适的遥控接收器。接收器必须绑定到发射器,以便您可以从接收器上移除绑定跳线(如果有)。该套件可能还包括一个 AA 电池座,旨在为接收器供电,但我们不会使用它,因为 BEC 将为接收器和飞行控制器供电。要找出哪些 RC 接收器通道连接到飞控上的哪些引脚,您需要查看飞控和 RC 系统的用户手册。
飞控手册会注明以下需要匹配和连接到接收器的引脚位置:
- 油门
- Pitch
- 偏航
- 滚动
- 辅助开关 1、2、3 等。
您现在可以进行以下连接:
- 阅读飞控手册,查看连接的是哪个 R/C 输入引脚与上述哪个功能。
- 阅读与每个功能相关联的通道的变送器手册。
- 一些遥控发射器可以重新编程以改变每个触点的功能。如果您决定更改任何输入(操纵杆或开关),请务必在确定接收器上的哪个通道对应于哪个功能后才这样做。油门、俯仰、偏航和滚转应始终与两个操纵杆/操纵杆相关联,而不是开关或按钮。
- 将接收机上的油门通道连接到飞控上的油门输入端。
- 将接收机上的 Pitch 通道连接到飞控上的 Pitch 输入端。
- 将接收机上的偏航通道连接到飞控上的偏航输入端。
- 将飞控的GND(通常是第三排引脚)连接到接收器的GND(通常是第三排引脚)。
- 如果使用辅助输入,将接收机上的Aux 1 连接到飞控上的Aux 1,依此类推。
每个通道可以使用3针伺服线,但只有一个通道(可以是任何一个)必须有电压和地;其余的只需要一根信号线。尽管只需要一个连接,但所有连接都可以是 GND 到 GND。再一次,接收器不需要单独的电池,因为它将由飞行控制器供电,飞行控制器由来自其中一个 ESC 的 BEC 供电。
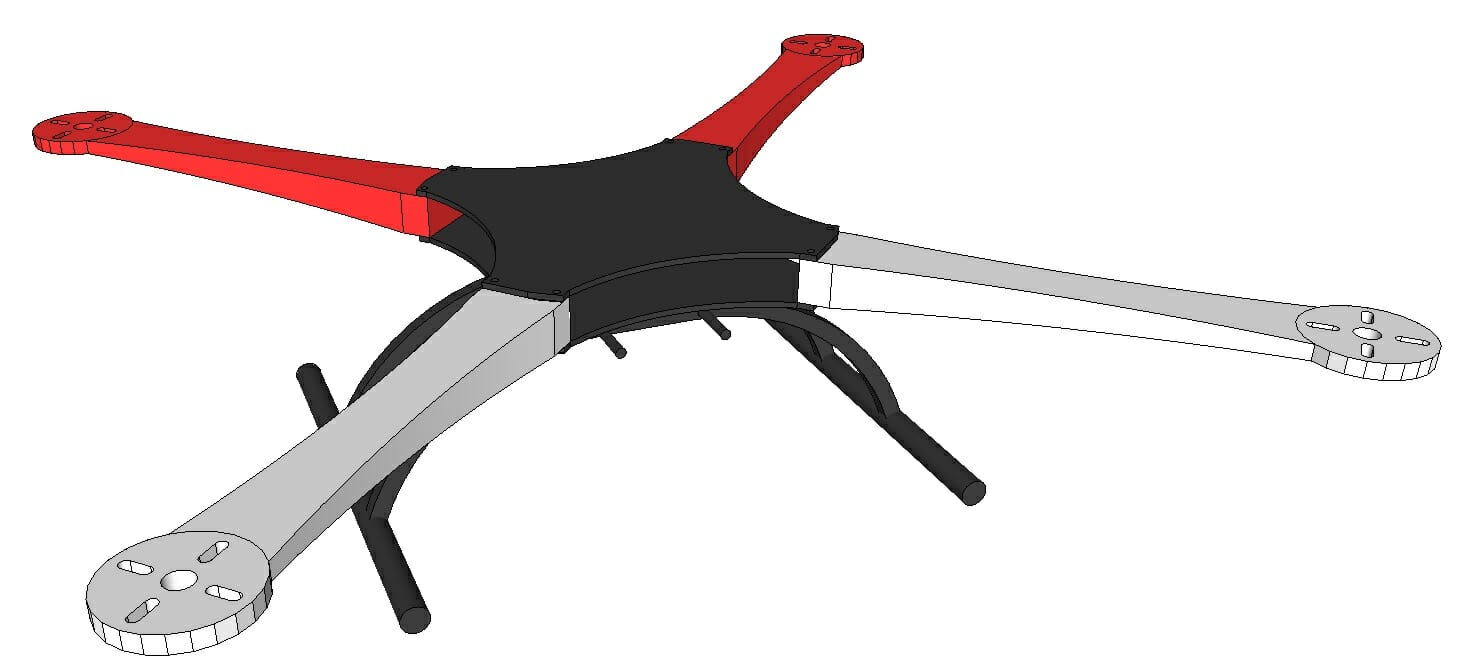
组装框架
如果您正在构建自己的框架,您可以在此阶段组装它。如果您购买了车架套件,请按照组装说明进行操作。请注意,您可能需要拆卸某些区域以方便连接或移除(隐藏)电气元件。目标是确保没有任何东西松动,所有电线都牢固固定,并且没有任何东西会掉出框架或缠结在一起。
安装
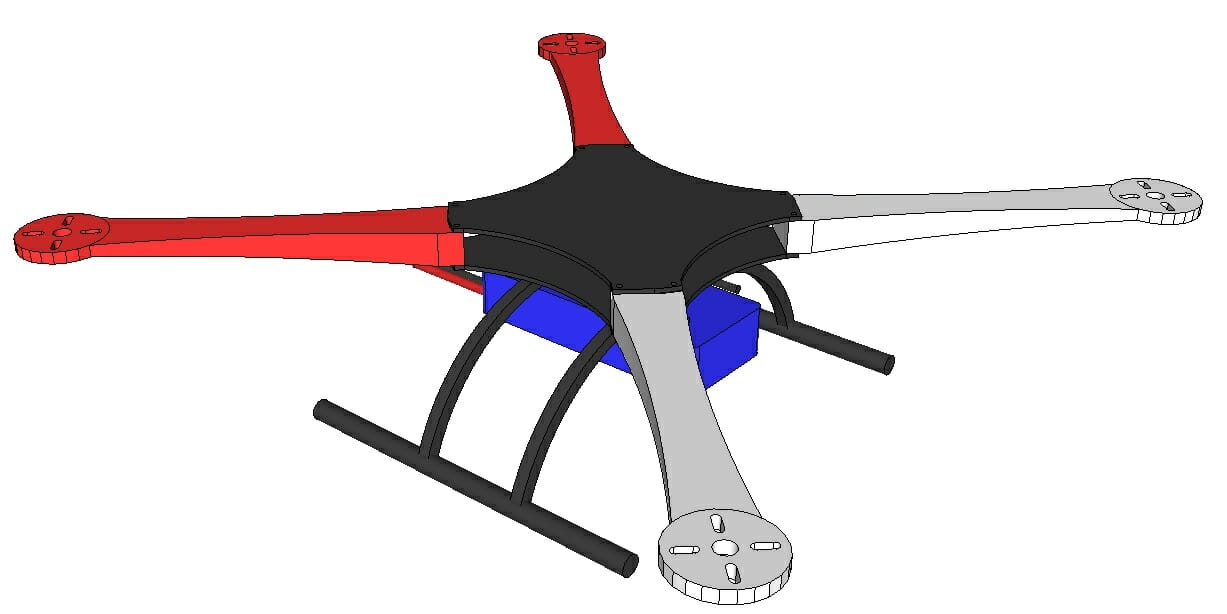
电池位置。
用于供电的电池通常是无人机上最重的元件,可以占其总重量的 1/4 到 1/2。因此,其安装位置非常重要。主电池的理想位置应该在飞机的中央,这样所有的电机都可以处理大致相同的负载。如果电池靠近飞机尾部,则后部电机必须提供比前部电机更大的推力,因此最大总推力将受到限制(当后部电机处于全推力时,将没有推在前电机上)。然而,多旋翼设计中的常用方法是保持飞机关于中心线(或至少一个轴)对称,因此电池应沿该中心线放置,而不是偏移到一侧或另一侧......
接下来,您需要决定将电池放置在什么高度。有几个地方可以安装电池:
- 框架下(飞机下面会很重,更稳定,杂技少)。
- 电机正下方(通常在框架内);可能是最好的地方之一。
- 与发动机或旋翼高度相同(例如安装在车架顶部)。
- 在螺旋桨上方(无人机在顶部会更重,更容易翻转)。
为获得最佳性能,理想情况下,电池应位于上方的位置 3。位置 4 产生倒立摆的效果,如果无人机倾斜超过一定角度,无人机将倾向于翻转。位置 1 将创建一个相当稳定的平台,该平台本质上倾向于保持水平,但非常不适合杂技表演。因此,大多数设计师选择位置 2 并将电池直接放置在框架下方或内部。这种方法为悬挂系统等有效载荷腾出了框架下方的空间,并为飞行控制器和其他电子设备腾出了尽可能接近的空间。
电池安装
将电池固定到车架上的常用方法有很多,包括:
- 魔术贴带
- 自粘魔术贴(一侧粘在电池上,另一侧粘在框架上)
- 在框架中
魔术贴带最常见于中等“标准” ”尺寸定制无人机虽然框架外壳最常见于商用无人机,但此类无人机的框架是在压力下构想的,并在内部专门为特定电池留出空间。理想情况下,魔术贴应该仅在电池相对较轻的情况下使用;建议在电池的整个长度上粘贴一条胶条,而不是在中间的一小段。如果您在使用魔术贴绑带时发现电池因握力不足而容易弹出,建议您在电池与绑带接触的位置添加橡胶条。不建议使用胶水将电池固定到框架上。如果您不使用无人机,请取出电池并将其存放在 LiPo 安全袋或陶瓷储液罐中。
给电池充电
您很可能选择了锂聚合物 (LiPo) 或其他锂电池。大多数超过 3.7V 的 LiPo 电池都有一条单独的充电电缆,带有用于充电的多针连接器,而电源线可以通过带有能够承受高放电电流的较大电线的两针连接器的存在来识别。充电连接器通常为每个电池组配备一个触点,以及一个公共接地触点。
由于与锂聚合物电池(氢和电)相关的危险,通常的做法是在不使用无人机时将电池完全从无人机中取出并将其放入锂聚合物安全袋中。给电池充电时使用同一个袋子(将电池连接到充电器,将电池放入袋子中(将充电器留在袋子外面)并合上(通常有魔术贴翻盖)。
。飞行控制器的放置和安装
理想情况下,飞行控制器应位于无人机的中心,与电机高度相同。如果无法做到这一点,则可以放置控制器略高或低。方向向左或右侧,避免向前或向后安装。如果您购买了无人机的框架,这些通常有飞控的安装孔,在最佳位置。飞控可以通过以下任何一种基本方式固定:
- 螺丝/螺母/立柱(基本)
- 双面胶带(确保它足够坚固)
(144)双面泡棉胶带(实现阻尼效应)- 橡胶阻尼衬套(用于高阻尼)
一些飞行控制器具有或可能具有可选的保护壳。
在这个阶段,你应该有一个完全组装和连接的无人机,不包括螺旋桨。第 6 课包括设置和测试发射机、飞行控制器软件、飞行前检查和首飞。







