เนื้อหา
บทนำ
เมื่อคุณเลือกส่วนประกอบหลักทั้งหมดสำหรับ UAV แล้ว คุณก็เริ่มประกอบได้ คู่มือนี้จะครอบคลุมข้อผิดพลาดทั่วไปเมื่อประกอบ UAV แบบหลายใบพัด พร้อมด้วยคำแนะนำที่เป็นประโยชน์สำหรับการปรับแต่ง บทเรียนนี้จะไม่ครอบคลุมถึงสิ่งของต่างๆ เช่น กล้อง / ระบบ FPV, อุปกรณ์ระยะไกลหรืออุปกรณ์เสริมอื่น ๆ (เราจะครอบคลุมใน 7 บทเรียน)
ส่วนประกอบที่ต้องมีในขั้นตอนนี้
- โครง (ซื้อหรือผลิตด้วยมือ)
- มอเตอร์ ESC ใบพัด แบตเตอรี่ อุปกรณ์ชาร์จ
- แผงจ่ายไฟ / สายรัด
- อุปกรณ์ควบคุมการบินและอุปกรณ์สื่อสาร (เสนอการควบคุมวิทยุ)

แรงขับ
เพื่อให้บรรลุวัตถุประสงค์ของบทเรียนนี้ ระบบขับเคลื่อน UAV ของคุณจะประกอบด้วยองค์ประกอบต่อไปนี้:
- มอเตอร์
- ESC
- การกระจายกำลัง (บอร์ดหรือสายรัด)
- แบตเตอรี่
- เครื่องควบคุมการบิน
โปรดทราบว่าใบพัดไม่อยู่ในรายการ อย่าติดตั้งใบพัดในขั้นตอนนี้! สกรูหลักจะเชื่อมต่อในบทเรียนที่ 6 เท่านั้น เนื่องจากนี่คือโดรนตัวแรกของคุณ เราจึงแนะนำให้ทำการเชื่อมต่อทางไฟฟ้าแบบ “ไร้กรอบ” ก่อนติดตั้งทุกอย่างบนเฟรม เพื่อตรวจสอบการเชื่อมต่อทั้งหมดและกำจัดข้อผิดพลาดที่ระบุ
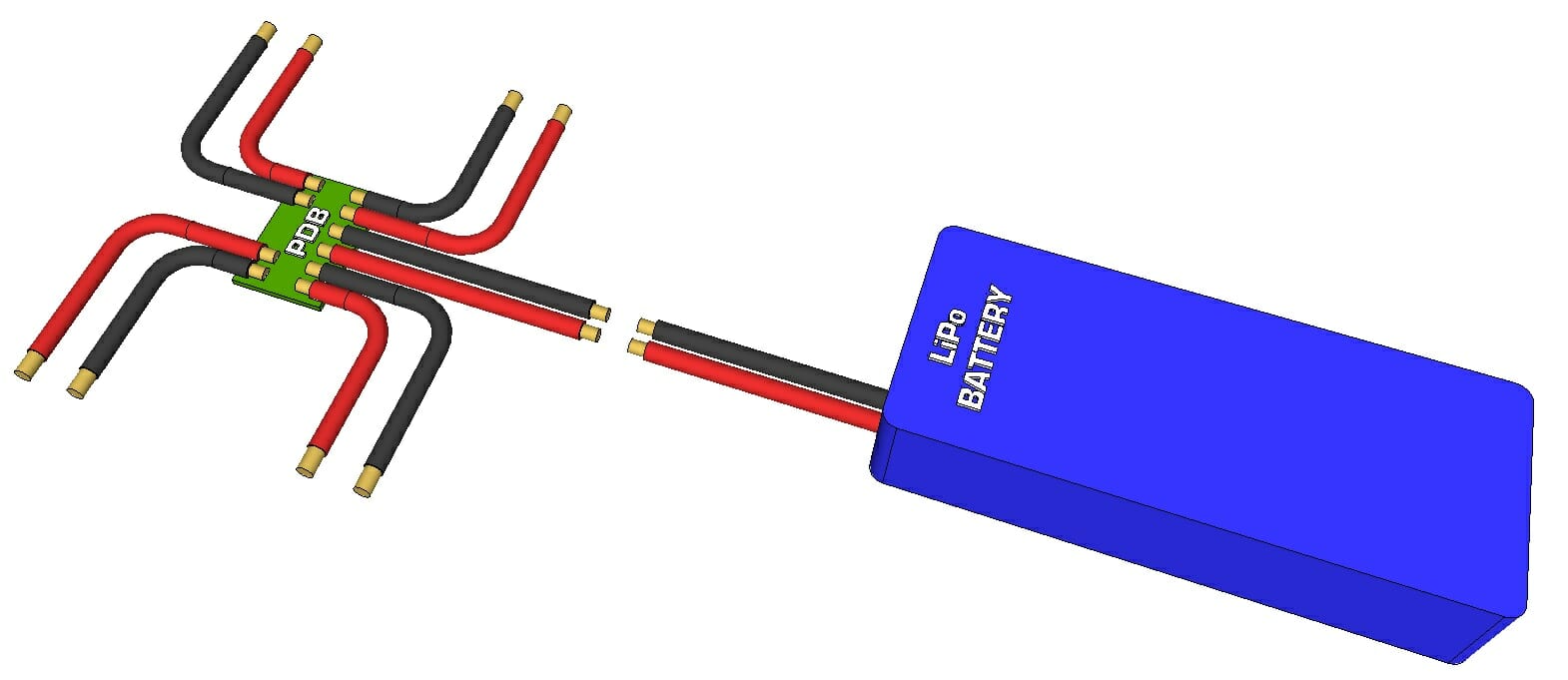
แบตเตอรี่. การกระจายพลังงาน
การเชื่อมต่อระหว่างแบตเตอรี่และระบบจำหน่ายไฟฟ้าควรจะค่อนข้างง่ายหากทั้งสองมีชนิดคอนเนคเตอร์เดียวกัน ถ้าเป็นเช่นนั้น ให้ไปยังขั้นตอนถัดไป หากคอนเนคเตอร์ต่างกัน ไม่ควรตัดสายแบตเตอรี่เพื่อแยกคอนเนคเตอร์ ซึ่งอาจทำให้เกิดไฟฟ้าลัดวงจรและไฟฟ้าช็อตได้! แต่คุณสามารถเลือกอะแดปเตอร์และใช้ระหว่างขั้วต่อของแบตเตอรี่กับขั้วต่อบนแผงจ่ายไฟได้ อีกทางเลือกหนึ่งคือการค้นหาขั้วต่อการผสมพันธุ์กับขั้วต่อแบตเตอรี่แล้วซื้อ จากนั้นตัดขั้วต่อที่มีอยู่ออกจากตัวจ่ายไฟและบัดกรีชิ้นส่วนที่ซื้อมา ขั้นแรกตรวจสอบให้แน่ใจว่าไม่มีการเชื่อมต่อระหว่างพินบวกและขั้วลบ
สิ่งสำคัญที่ควรทราบคือ UAV แบบหลายใบพัดส่วนใหญ่ไม่มีสวิตช์เปิด/ปิด ดังนั้นจึงมีการจ่ายไฟและตัดการเชื่อมต่อโดยการเชื่อมต่อและถอดแบตเตอรี่หลักออกจากขั้วต่อการจ่ายไฟ ดังนั้นขั้วต่อจะต้องเป็น ยึดอย่างแน่นหนาและสายไฟ / จุดบัดกรีหุ้มฉนวนอย่างดีด้วยท่อหดด้วยความร้อนและ / หรือเทปพันสายไฟ
ถอดแบตเตอรี่ออกจากตัวจ่ายไฟก่อนดำเนินการต่อ
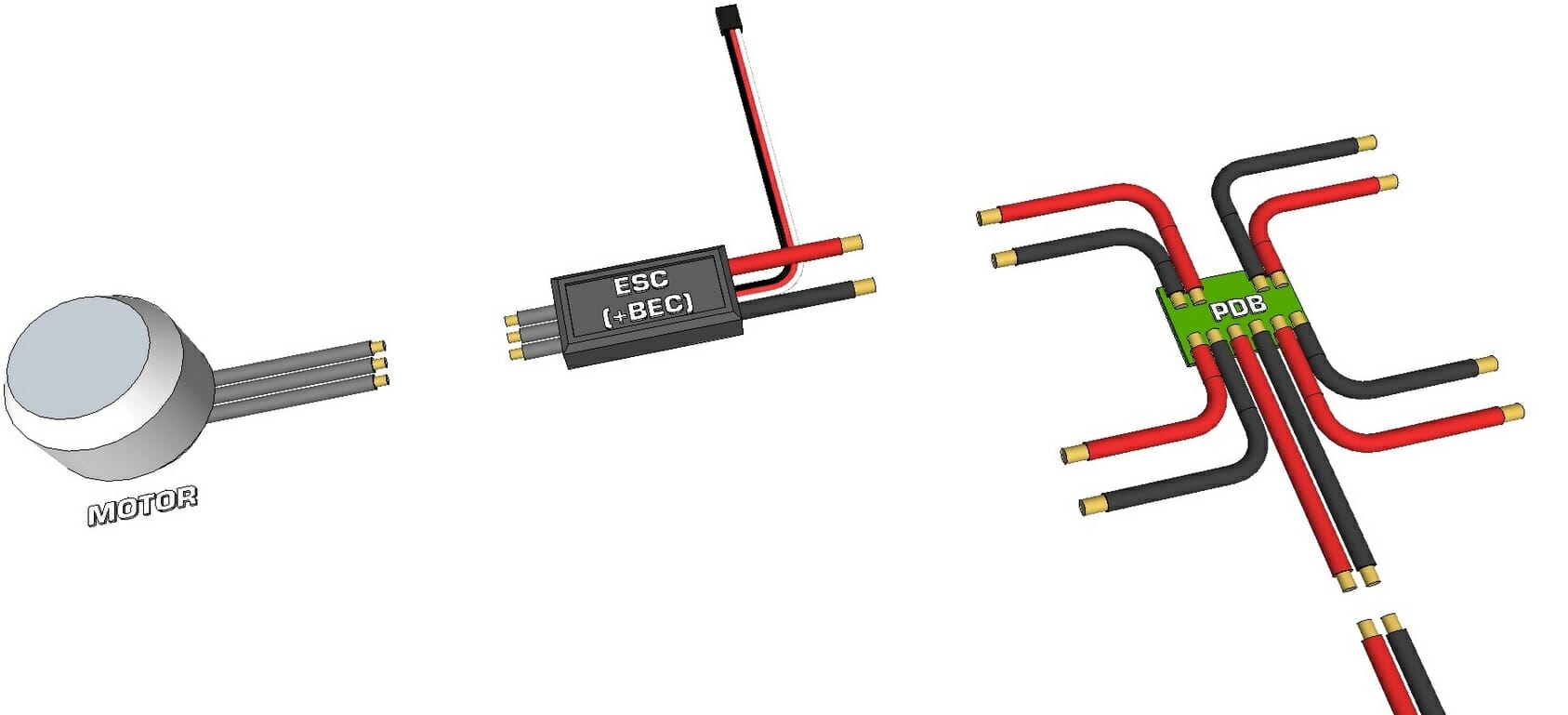
มอเตอร์ NS. การจ่ายไฟ
บอร์ดจ่ายไฟ (PDP) หรือการจ่ายไฟแบบมีสายทำหน้าที่กระจายพลังงานจากแบตเตอรีหลักไปยัง ESC แต่ละตัวเป็นหลัก แรงดันไฟฟ้าถูกส่งไปยัง ESC "ตามที่เป็นอยู่" ดังนั้นจึงไม่จำเป็นต้องเพิ่ม (เพิ่ม) หรือลด (ลด) แรงดันไฟฟ้า หากโดรนของคุณมีมอเตอร์สี่ตัว คุณควรมี ESC สี่ตัว ดังนั้น แผงจ่ายไฟ / สายไฟของคุณควรแยกแบตเตอรี่หลักออกเป็นสี่ส่วนเชื่อมต่อ หาก PRP ของคุณมีการเชื่อมต่อ 6 จุด และคุณกำลังสร้าง quadrocopter คุณไม่จำเป็นต้องเชื่อมต่อสองส่วนสุดท้าย หากคุณกำลังสร้างเฮกซาคอปเตอร์ PDP ของคุณควรกระจายพลังงานจากแบตเตอรี่หลักไปยังจุดเชื่อมต่อหกจุด ESC ประกอบด้วยสายไฟดังต่อไปนี้:
- ริบบิ้น 3 เส้นขนาด 0.1 นิ้ว 1 เส้นพร้อมขั้วต่อ R / C ซึ่งหมุดสีดำมักจะกราวด์ สีแดงให้เอาต์พุต 5V (ผ่าน BEC ) *) และสีเหลือง / ขาวเป็นสัญญาณเข้า
- สายแยกสามเส้นเชื่อมต่อกับสายสามเส้นบนมอเตอร์กระแสตรงแบบไม่มีแปรงถ่าน
- ขั้วต่ออินพุทสองตัวสำหรับเชื่อมต่อแบตเตอรี่กับ PDB (บางตัวมีขั้วต่อแบบบัดกรีที่มีการบัดกรี บางส่วนรวมอยู่ด้วย และบางครั้งก็ไม่มีเลย)
*ESC มักจะมีวงจรกำจัดแบตเตอรี่ในตัว (หรือ BEC) ที่แปลงแรงดันแบตเตอรี่หลักเป็น 5V เพื่อจ่ายไฟให้กับเครื่องรับและตัวควบคุมการบิน โดยปกติแล้ว 5V จะจ่ายผ่านขั้วต่อ RC จาก ESC (โดยปกติคือพินกลาง / แดง) คุณต้องการ BEC เพียงตัวเดียวในการจ่ายไฟให้กับตัวควบคุมการบิน
หากแผงจ่ายไฟใช้ขั้วต่อที่ไม่ตรงกับขั้วต่อบน ESC หรือแบตเตอรี่ คุณจะต้องซื้ออะแดปเตอร์ (อะแดปเตอร์) หรือซื้อขั้วต่อใหม่ และแทนที่ด้วย ESC หรือ PRP ความได้เปรียบยังคงอยู่กับบอร์ดจ่ายไฟ ซึ่งคอนเนคเตอร์ที่ตรงกับขั้วของแบตเตอรี่และ ESC ส่วนใหญ่แล้ว แบตเตอรี่ลิเธียมโพลิเมอร์ของ UAV สามารถมีขั้วต่อ DEANS, XT60EC3
หากคุณต้องการจ่ายไฟให้กับอุปกรณ์อิเล็กทรอนิกส์กระแสไฟต่ำเพิ่มเติม (ไฟ LED จี้ ฯลฯ) แต่ไม่มีการเชื่อมต่อสำรองบนแผงจ่ายไฟ คุณสามารถใช้สายชาร์จสำหรับชาร์จแบตเตอรี่ได้ ขั้วต่อการชาร์จสีขาวมักจะมีหนึ่งพินสำหรับกราวด์และหนึ่งพินสำหรับแต่ละเซลล์ (1S, 2S, 3S ฯลฯ) ที่ใช้ในชุดแบตเตอรี่ LiPoแม้ว่าขั้วต่อนี้ใช้สำหรับชาร์จแบตเตอรี่จริงๆ เท่านั้น แต่ก็สามารถให้แรงดันเอาต์พุต 3.7V จากแต่ละพิน และสามารถใช้จ่ายไฟให้กับอุปกรณ์อิเล็กทรอนิกส์ที่มีกระแสไฟต่ำ เช่น สายรัดหรือไฟ LED
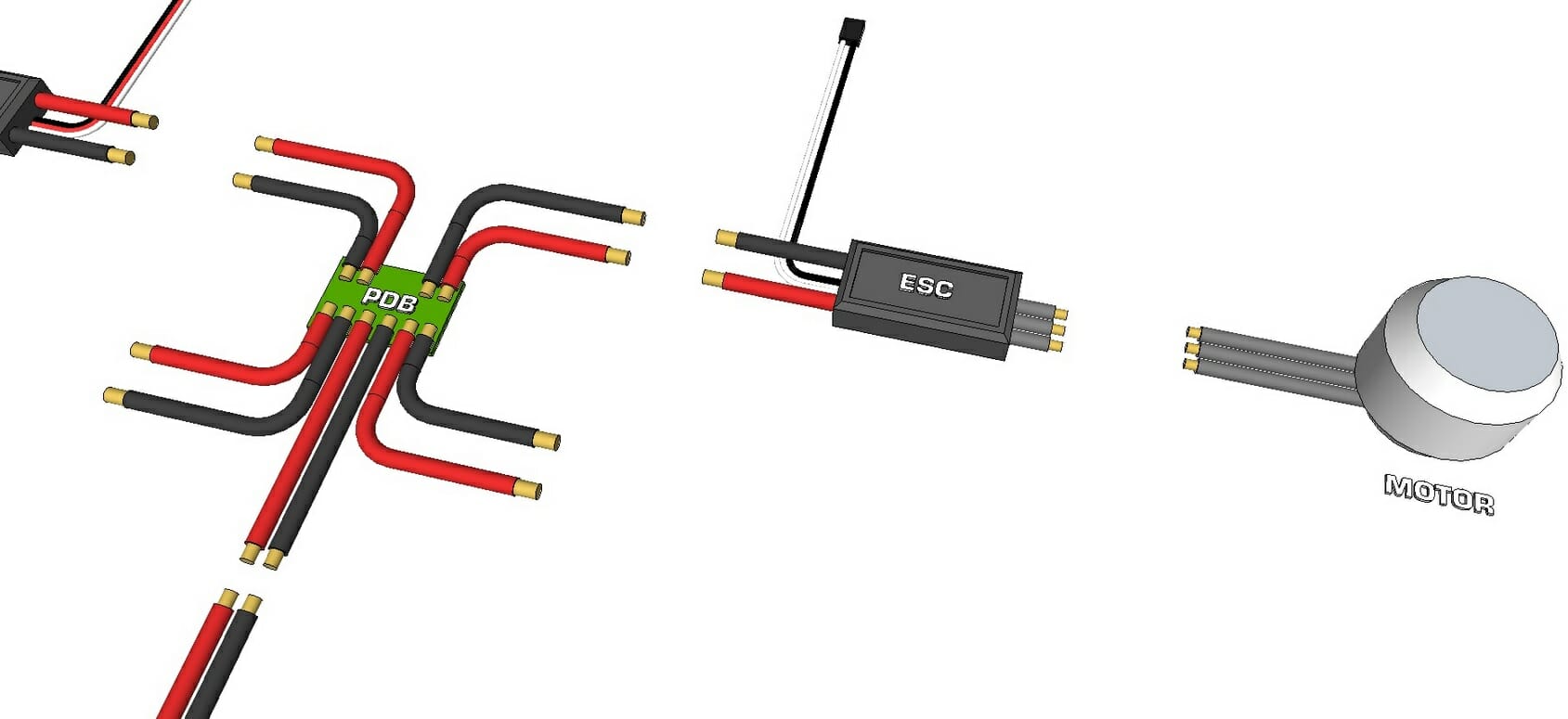
- ถอดสายสีแดงออกจากขั้วต่อ R / C แบบ 3 ขาทุกอันของระบบควบคุมความเร็วอัตโนมัติยกเว้นหนึ่งตัว ขอแนะนำให้ทำเช่นนี้ในลักษณะที่คุณสามารถเสียบกลับเข้าไปใหม่ได้เสมอหากจำเป็น พันปลายลวดที่แยกออกมาแต่ละเส้นด้วยเทปพันสายไฟ หรือใช้ท่อหดแบบใช้ความร้อนเพื่อเป็นฉนวนเพื่อไม่ให้สัมผัสกับอุปกรณ์อิเล็กทรอนิกส์อื่นๆ ในภายหลัง สายสีแดงเพียงเส้นเดียวที่ไม่ได้ถูกแตะต้องจะจ่ายไฟให้กับตัวควบคุมการบินที่ใช้ในการประกอบ
- ต่อสายไฟสองเส้นของ ESC แต่ละตัวเข้ากับแผงจ่ายไฟ ตรวจสอบให้แน่ใจว่าสายสีแดงเป็นค่าบวก () และสายสีดำเป็นค่าลบ (-)
- หากบอร์ดจ่ายไฟที่คุณใช้มีคอนเน็กเตอร์ R / C ของตัวเอง ในกรณีนี้คุณจะต้องเชื่อมต่อพิน R / C ของ ESC แต่ละตัวกับคอนเน็กเตอร์ R / C บนบอร์ดนี้ หรือเชื่อมต่อโดยตรงกับตัวควบคุมการบิน
- เชื่อมต่อขั้วต่อมอเตอร์ทั้งสามตัวเข้ากับขั้วต่อ ESC สามตัว ในขณะนี้ ลำดับการเชื่อมต่อตัวเชื่อมต่อเหล่านี้ไม่สำคัญ (หากส่งผลต่อทิศทางการหมุนจะได้รับการแก้ไขตามความจำเป็นในภายหลัง)
โปรดทราบว่าหากคุณตัดสินใจที่จะถอดหรือซ่อนสายไฟในขั้นตอนนี้ คุณอาจจำเป็นต้องเข้าถึงการเชื่อมต่อบางส่วนในภายหลังตามขั้นตอนที่อธิบายไว้ในบทที่ 6 โดยเฉพาะอย่างยิ่ง เปลี่ยน การเชื่อมต่อระหว่าง ESC กับมอเตอร์เพื่อให้มอเตอร์หมุนไปในทิศทางตรงกันข้าม
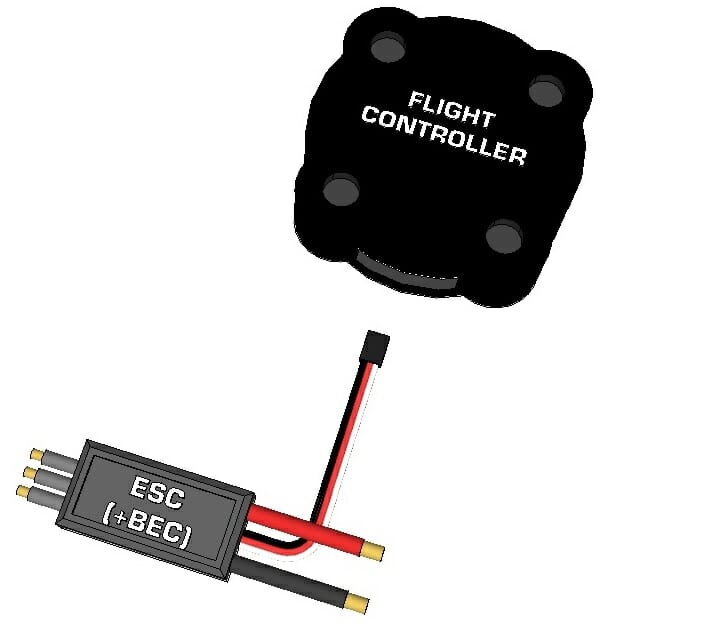
ESC. ผู้ควบคุมการบิน
คุณสามารถเชื่อมต่ออินพุต R / C ของระบบควบคุมความเร็วอัตโนมัติกับตัวควบคุมการบินได้แล้ว ตัวควบคุมการบินที่คุณเลือกควรมีไดอะแกรมที่แสดงว่าหมุดควบคุมใดที่เชื่อมต่อกับมอเตอร์ของชุดประกอบหลายโรเตอร์ของคุณ แผนภาพนี้ควรแสดงทิศทางการหมุนของมอเตอร์แต่ละตัวด้วย แต่อีกครั้ง คุณไม่จำเป็นต้องพิจารณาทิศทางในตอนนี้
- ดูแผนภาพการเชื่อมต่อระหว่างมอเตอร์ / ESC และตัวควบคุมการบินในคู่มือการใช้งาน PC
- เชื่อมต่อขั้วต่อ R / C ของ ESC แต่ละตัวกับหมุดที่สอดคล้องกันบนตัวควบคุมการบิน ตรวจสอบให้แน่ใจว่าสายดิน (โดยปกติเป็นสีดำ) เชื่อมต่อกับขากราวด์ของตัวควบคุมการบินและพินสัญญาณ (สีขาวหรือสีเหลือง) เชื่อมต่อกับขาสัญญาณบนตัวควบคุมการบิน...
- มีขั้วต่อ RC เพียงตัวเดียวเท่านั้นที่ยังคงมีพิน (กำลัง) สีแดง
การสื่อสาร
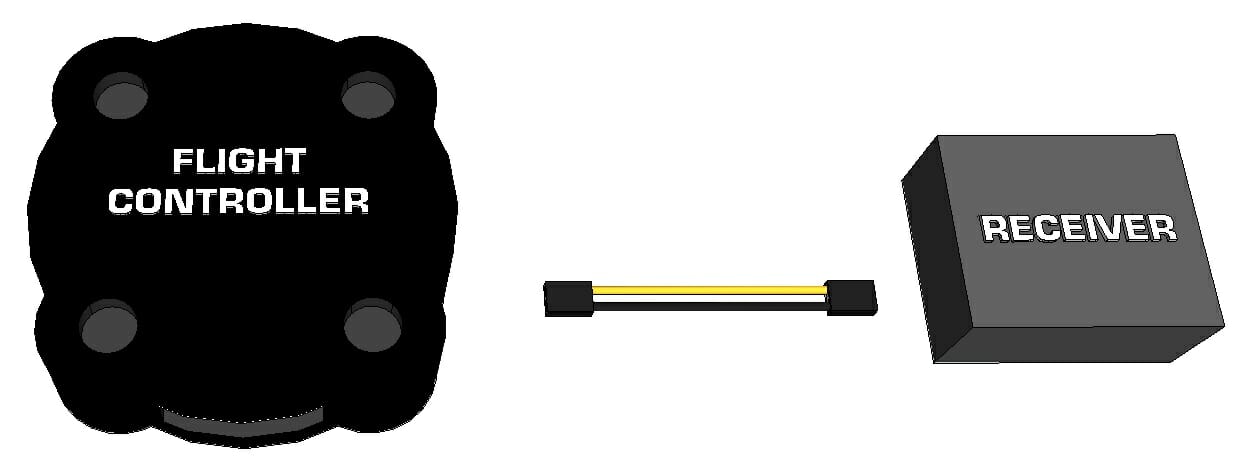
ผู้รับ ผู้ควบคุมการบิน
สมมติว่าในบทเรียนนี้ คุณได้เลือกให้การควบคุมวิทยุเป็นอุปกรณ์อินพุตหากคุณต้องการใช้ WiFi, Bluetooth หรือวิธีการป้อนข้อมูลอื่นๆ โปรดอ่านคู่มือผู้ควบคุมการบินและค้นหาอินพุตแบบอนุกรม ส่วนนี้จะอธิบายวิธี / ตำแหน่งที่จะเชื่อมต่ออุปกรณ์อินพุตแบบอนุกรมกับตัวควบคุมการบิน คุณมักจะต้องค้นหาและเชื่อมต่อตัวส่งสัญญาณ (Tx) รับ (Rx) แรงดันไฟ (5V) และพิน GND จากอุปกรณ์ไร้สายไปยังตัวส่งสัญญาณ ทำให้ Rx จากที่หนึ่งไปยังอีก Tx และในทางกลับกัน
เครื่องส่ง RC ของคุณต้องมาพร้อมกับเครื่องรับ RC ที่เหมาะสม ตัวรับจะต้องผูกติดกับตัวส่งสัญญาณ คุณจึงสามารถถอดจัมเปอร์ผูกออกจากตัวรับได้ (ถ้ามี) ชุดอุปกรณ์นี้อาจรวมถึงที่ใส่แบตเตอรี่ AA ซึ่งออกแบบมาเพื่อจ่ายไฟให้กับเครื่องรับ แต่เราจะไม่ใช้มันเนื่องจาก BEC จะจ่ายไฟให้กับทั้งเครื่องรับและตัวควบคุมการบิน หากต้องการค้นหาช่องรับสัญญาณ RC ที่เชื่อมต่อกับหมุดบนตัวควบคุมการบิน คุณต้องดูคู่มือผู้ใช้ของทั้งตัวควบคุมการบินและระบบ RC
คู่มือการควบคุมการบินจะระบุตำแหน่งของหมุดต่อไปนี้ที่จะจับคู่และเชื่อมต่อกับเครื่องรับ:
- คันเร่ง
- ทางลาด
- หันเห
- ม้วน
- Aux Switches 1, 2, 3, ฯลฯ.
ตอนนี้คุณสามารถทำการเชื่อมต่อต่อไปนี้:
- อ่านคู่มือควบคุมการบินเพื่อดูว่าพินอินพุต R / C ใดเชื่อมต่ออยู่ ด้วยฟังก์ชันใดข้างต้น
- อ่านคู่มือเครื่องส่งสัญญาณที่ช่องที่เกี่ยวข้องกับแต่ละฟังก์ชัน
- เครื่องส่ง RC บางรุ่นสามารถตั้งโปรแกรมใหม่เพื่อเปลี่ยนฟังก์ชันของหน้าสัมผัสแต่ละอัน หากคุณตัดสินใจที่จะเปลี่ยนอินพุตใดๆ (จอยสติ๊กหรือสวิตช์) ให้ทำเช่นนั้นหลังจากแน่ใจว่าคุณรู้ว่าช่องสัญญาณใดบนเครื่องรับที่สอดคล้องกับฟังก์ชันใด Throttle, Pitch, Yaw และ Roll ควรเชื่อมโยงกับแท่ง / จอยสติ๊กสองอันเสมอ ไม่ใช่สวิตช์หรือปุ่ม
- เชื่อมต่อช่อง Throttle บนเครื่องรับกับอินพุต Throttle บนตัวควบคุมการบิน
- เชื่อมต่อช่องสัญญาณ Pitch บนเครื่องรับกับอินพุต Pitch บนตัวควบคุมการบิน
- เชื่อมต่อช่อง Yaw บนเครื่องรับกับอินพุต Yaw บนตัวควบคุมการบิน
- เชื่อมต่อ GND บนตัวควบคุมการบิน (โดยปกติคือพินแถวที่สาม) กับ GND บนเครื่องรับ (โดยปกติคือพินแถวที่สาม)
- หากจะใช้อินพุตเสริม ให้เชื่อมต่อ Aux 1 บนเครื่องรับกับ Aux 1 บนตัวควบคุมการบิน และอื่นๆ
คุณสามารถใช้สายเซอร์โว 3 พินสำหรับแต่ละช่องสัญญาณได้ แต่ต้องมีเพียงหนึ่งช่องสัญญาณ (สามารถมีได้) เท่านั้นที่มีแรงดันไฟฟ้าและกราวด์ ที่เหลือต้องใช้สายสัญญาณเท่านั้น การเชื่อมต่อทั้งหมดสามารถเป็น GND ถึง GND ได้แม้ว่าจะต้องการเพียงอันเดียวเท่านั้น อีกครั้งที่เครื่องรับไม่จำเป็นต้องใช้แบตเตอรี่แยกต่างหากเนื่องจากจะใช้พลังงานจากตัวควบคุมการบินซึ่งขับเคลื่อนโดย BEC จาก ESC ตัวใดตัวหนึ่ง
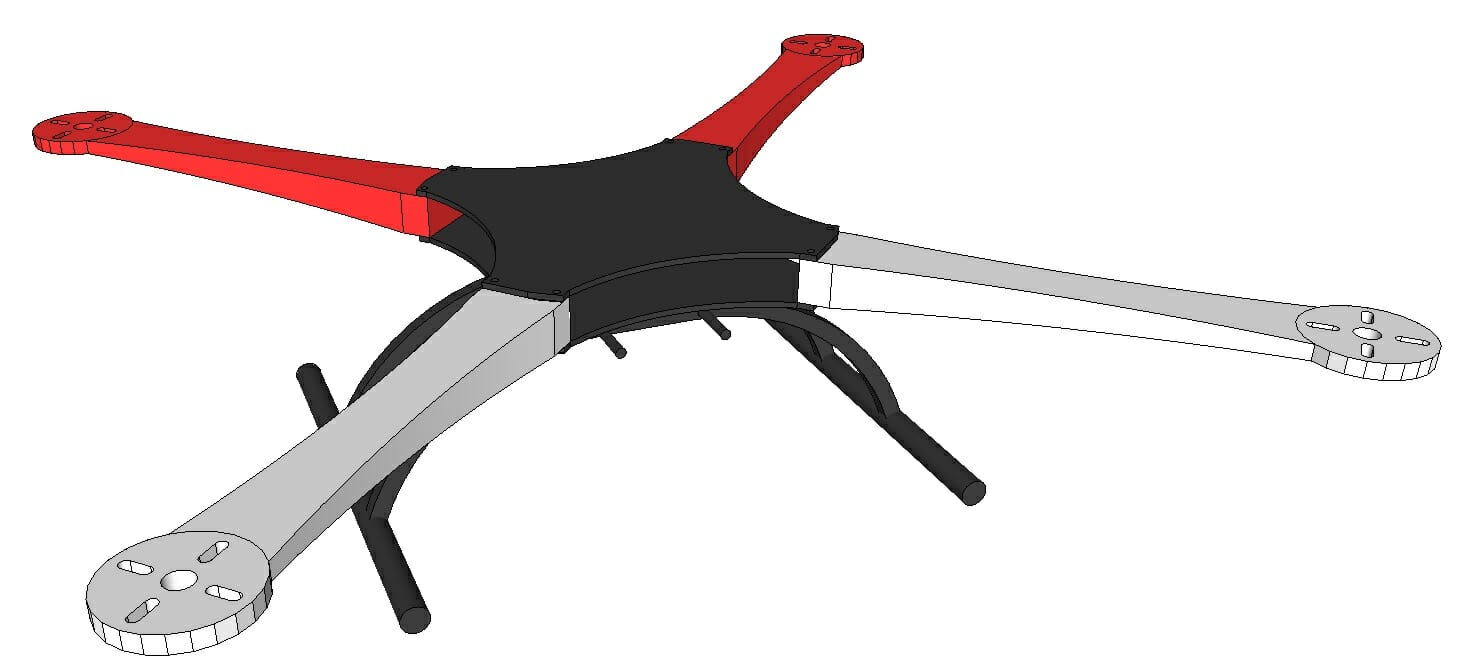
การประกอบเฟรม
หากคุณกำลังสร้างเฟรมของคุณเอง คุณสามารถประกอบได้ในขั้นตอนนี้หากคุณซื้อชุดเฟรม ให้ปฏิบัติตามคำแนะนำในการประกอบ โปรดทราบว่าคุณอาจต้องถอดแยกชิ้นส่วนบางส่วนเพื่ออำนวยความสะดวกในการเชื่อมต่อหรือถอด (ซ่อน) องค์ประกอบทางไฟฟ้า เป้าหมายคือเพื่อให้แน่ใจว่าไม่มีอะไรหลวม สายไฟทั้งหมดถูกยึดอย่างแน่นหนา และไม่มีสิ่งใดหลุดออกจากเฟรมหรือพันกันได้
การติดตั้ง
ตำแหน่งแบตเตอรี่
แบตเตอรี่ที่ใช้สำหรับพลังงานมักจะเป็นองค์ประกอบที่หนักที่สุดใน UAV และสามารถอยู่ในช่วงตั้งแต่ 1/4 ถึง 1/2 ของน้ำหนักทั้งหมด ดังนั้นสถานที่ติดตั้งจึงมีความสำคัญมาก ตำแหน่งที่เหมาะสมที่สุดสำหรับแบตเตอรี่หลักควรอยู่ตรงกลางของเครื่องบิน เพื่อให้มอเตอร์ทุกตัวสามารถรับน้ำหนักได้ใกล้เคียงกัน หากแบตเตอรี่อยู่ใกล้กับส่วนท้ายของเครื่องบิน มอเตอร์ด้านหลังจะต้องให้แรงขับมากกว่ามอเตอร์ด้านหน้า ดังนั้น แรงขับรวมสูงสุดจะถูกจำกัด (เมื่อมอเตอร์ด้านหลังมีแรงขับเต็มที่จะไม่มี แรงขับบนมอเตอร์ด้านหน้า) ในขณะที่แนวทางปกติในการออกแบบหลายใบพัดคือการทำให้เครื่องบินมีความสมมาตรเกี่ยวกับเส้นกึ่งกลาง (หรืออย่างน้อยหนึ่งแกน) ดังนั้นควรวางแบตเตอรี่ไว้ตามแนวกึ่งกลางนั้นแทนที่จะชดเชยด้านใดด้านหนึ่งหรืออีกด้านหนึ่ง...
ต่อไป คุณจะต้องตัดสินใจว่าจะวางแบตเตอรี่ที่ความสูงเท่าใด มีสถานที่หลายแห่งที่สามารถติดตั้งแบตเตอรี่ได้:
- ใต้เฟรม (เครื่องบินจะหนักที่ด้านล่าง มีเสถียรภาพมากขึ้น และกายกรรมน้อยลง)
- ใต้มอเตอร์โดยตรง (โดยปกติอยู่ภายในเฟรม); อาจเป็นหนึ่งในสถานที่ที่ดีที่สุด
- ที่ความสูงเท่ากับเครื่องยนต์หรือโรเตอร์ (เช่น ติดตั้งที่ด้านบนของเฟรม)
- เหนือใบพัด (UAV จะหนักกว่าอยู่ด้านบนและมีแนวโน้มที่จะพลิกคว่ำ)
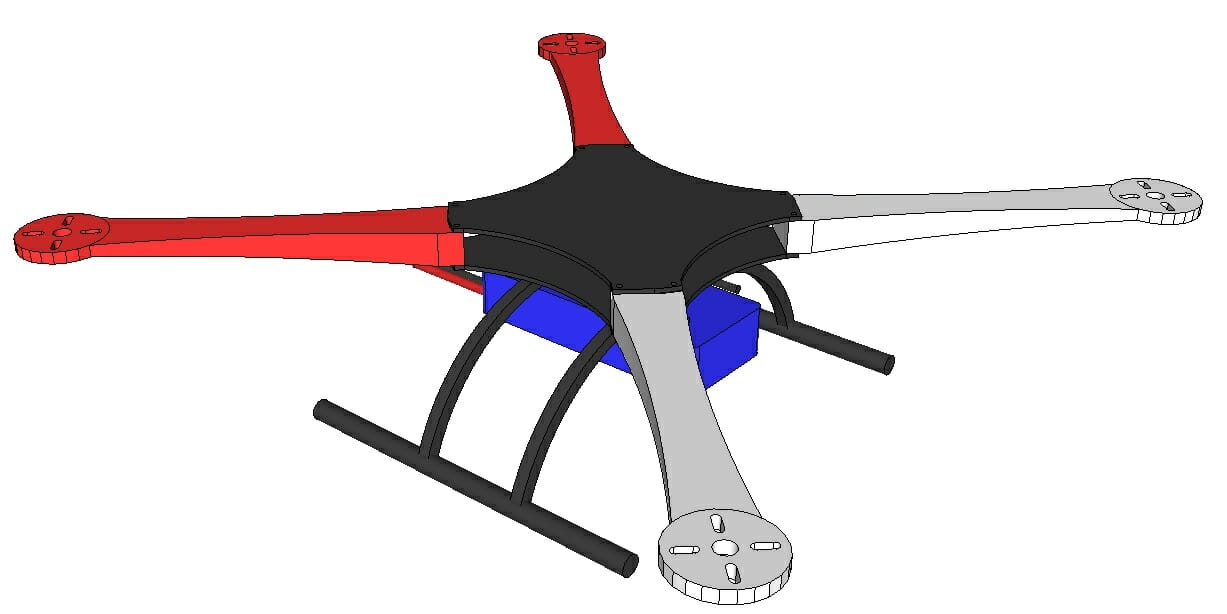
เพื่อประสิทธิภาพที่ดีที่สุด แบตเตอรี่ควรอยู่ในตำแหน่งที่ 3 ด้านบน ตำแหน่งที่ 4 สร้างเอฟเฟกต์ของลูกตุ้มคว่ำ และหาก UAV เอียงเกินมุมหนึ่ง โดรนจะมีแนวโน้มที่จะพลิก ตำแหน่งที่ 1 จะสร้างแพลตฟอร์มที่ค่อนข้างเสถียรซึ่งโดยธรรมชาติแล้วมีแนวโน้มที่จะอยู่ในระดับ แต่ไม่เหมาะสำหรับการแสดงผาดโผนอย่างยิ่ง ดังนั้น นักออกแบบส่วนใหญ่จึงเลือกตำแหน่งที่ 2 และวางแบตเตอรี่ไว้ใต้เฟรมหรือด้านในโดยตรง วิธีการนี้จะเพิ่มพื้นที่ว่างใต้เฟรมสำหรับน้ำหนักบรรทุก เช่น ระบบกันสะเทือน และพื้นที่ด้านบนเพื่อให้ตัวควบคุมการบินและอุปกรณ์อิเล็กทรอนิกส์อื่นๆ สามารถเข้าถึงได้มากที่สุด
การติดตั้งแบตเตอรี่
มีหลายวิธีทั่วไปในการติดแบตเตอรี่เข้ากับเฟรม รวมถึง:
- สายรัดเวลโคร
- แถบตีนตุ๊กแกแบบมีกาวในตัว (ด้านหนึ่งติดกับแบตเตอรี่และอีกด้านหนึ่งติดกับโครง)
- ในกรอบ
สายรัดเวลโครเป็นสายรัดแบบเวลโครที่ใช้กันทั่วไปสำหรับมาตรฐานขนาดกลาง ” โดรนขนาดกำหนดเอง ในขณะที่โครงตู้มักพบในโดรนเชิงพาณิชย์ เฟรมของ UAV ดังกล่าวถูกสร้างภายใต้แรงกดดันและปล่อยให้พื้นที่ภายในสำหรับแบตเตอรี่เฉพาะโดยเฉพาะ ควรใช้ Velcro เฉพาะในกรณีที่แบตเตอรี่ค่อนข้างเบา แทนที่จะติดส่วนสั้นๆ ตรงกลาง ขอแนะนำให้ติดแถบเดียวตลอดความยาวของแบตเตอรี่ หากคุณใช้สายรัดเวลโครและพบว่าแบตเตอรี่มีแนวโน้มที่จะหลุดออกมาเนื่องจากขาดการยึดเกาะ ขอแนะนำให้เพิ่มแถบยางที่แบตเตอรี่สัมผัสกับสายรัด ไม่แนะนำให้ใช้กาวยึดแบตเตอรี่เข้ากับโครง หากคุณไม่ได้ใช้ UAV ให้ถอดแบตเตอรี่ออกและเก็บไว้ในถุงนิรภัย LiPo หรืออ่างเก็บน้ำเซรามิก
การชาร์จแบตเตอรี่
เป็นไปได้มากที่คุณจะเลือกแบตเตอรี่ลิเธียมโพลิเมอร์ (LiPo) หรือแบตเตอรี่ลิเธียมอื่นๆ แบตเตอรี่ LiPo ที่มีขนาดเกิน 3.7V ส่วนใหญ่มีสายชาร์จแยกต่างหากพร้อมขั้วต่อแบบหลายพินสำหรับการชาร์จ ในขณะที่สายไฟสามารถระบุได้ด้วยขั้วต่อแบบสองพินที่มีสายไฟขนาดใหญ่กว่าที่สามารถทนต่อกระแสไฟที่ไหลออกมาสูงได้ ขั้วต่อการชาร์จมักจะมีหน้าสัมผัสเดียวสำหรับแบตเตอรีแต่ละแบตเตอรี เช่นเดียวกับขั้วต่อกราวด์ทั่วไป
เนื่องจากอันตรายที่เกี่ยวข้องกับแบตเตอรี่ LiPo (ไฮโดรเจนและไฟฟ้า) เป็นเรื่องปกติที่จะถอดแบตเตอรี่ออกจากโดรนโดยสมบูรณ์เมื่อไม่ใช้งานและใส่ไว้ในถุง LiPo Safe ใช้ถุงเดียวกันในการชาร์จแบตเตอรี่ (เชื่อมต่อแบตเตอรี่กับเครื่องชาร์จ วางแบตเตอรี่ในกระเป๋า (ทิ้งเครื่องชาร์จไว้นอกกระเป๋า) และปิด (โดยปกติจะมีแถบตีนตุ๊กแก)
.ตำแหน่งและการติดตั้งเครื่องควบคุมการบิน
ตามหลักการแล้ว ตัวควบคุมการบินควรอยู่ตรงกลางของโดรนที่ความสูงระดับเดียวกับมอเตอร์ หากไม่สามารถทำได้ ก็สามารถวางตัวควบคุมได้ สูงขึ้นหรือต่ำลงเล็กน้อย ทิศทางไปทางซ้ายหรือขวาและหลีกเลี่ยงการติดตั้งไปข้างหน้าหรือข้างหลังหากคุณซื้อเฟรมสำหรับ UAV เหล่านี้มักจะมีรูสำหรับติดตั้งตัวควบคุมการบินซึ่งอยู่ในตำแหน่งที่เหมาะสมที่สุดตัวควบคุมการบิน สามารถแก้ไขได้ด้วยวิธีพื้นฐานดังต่อไปนี้:
- สกรู / น็อต / เสา (พื้นฐาน)
- เทปกาวสองหน้า (ตรวจสอบให้แน่ใจว่าแข็งแรงเพียงพอ)
- เทปโฟมสองหน้า (เพื่อให้บรรลุ ผลการหน่วง)
- ยางกันกระแทกบูช (สำหรับการหน่วงสูง)
ตัวควบคุมการบินบางตัวอาจมีหรืออาจมีเคสป้องกันเสริม
ในขั้นตอนนี้คุณควรมี UAV ที่ประกอบและเชื่อมต่ออย่างสมบูรณ์ ไม่รวมใบพัด บทที่ 6 ประกอบด้วยการตั้งค่าและทดสอบเครื่องส่ง ซอฟต์แวร์ควบคุมการบิน การตรวจสอบก่อนบิน และเที่ยวบินแรก