เนื้อหา
บทนำ
ในบทที่ 5 คุณต้องประกอบโดรนให้เสร็จ ใช้เวลาของคุณ เพราะแม้ความผิดพลาดเพียงเล็กน้อยก็อาจนำไปสู่การขัดข้องได้ คุณยังมีขั้นตอนสองสามขั้นตอนก่อนเที่ยวบินแรกของคุณ ดังนั้นโปรดอดทนรอและปฏิบัติตามหลักเกณฑ์ด้านล่าง เช่นเดียวกับในบทเรียนที่แล้ว เราจะยังคงสมมติว่าคุณใช้อุปกรณ์ควบคุมวิทยุเพื่อโต้ตอบกับ UAV (ซึ่งเป็นวิธีการควบคุมที่ใช้กันอย่างแพร่หลายที่สุดในปัจจุบัน)
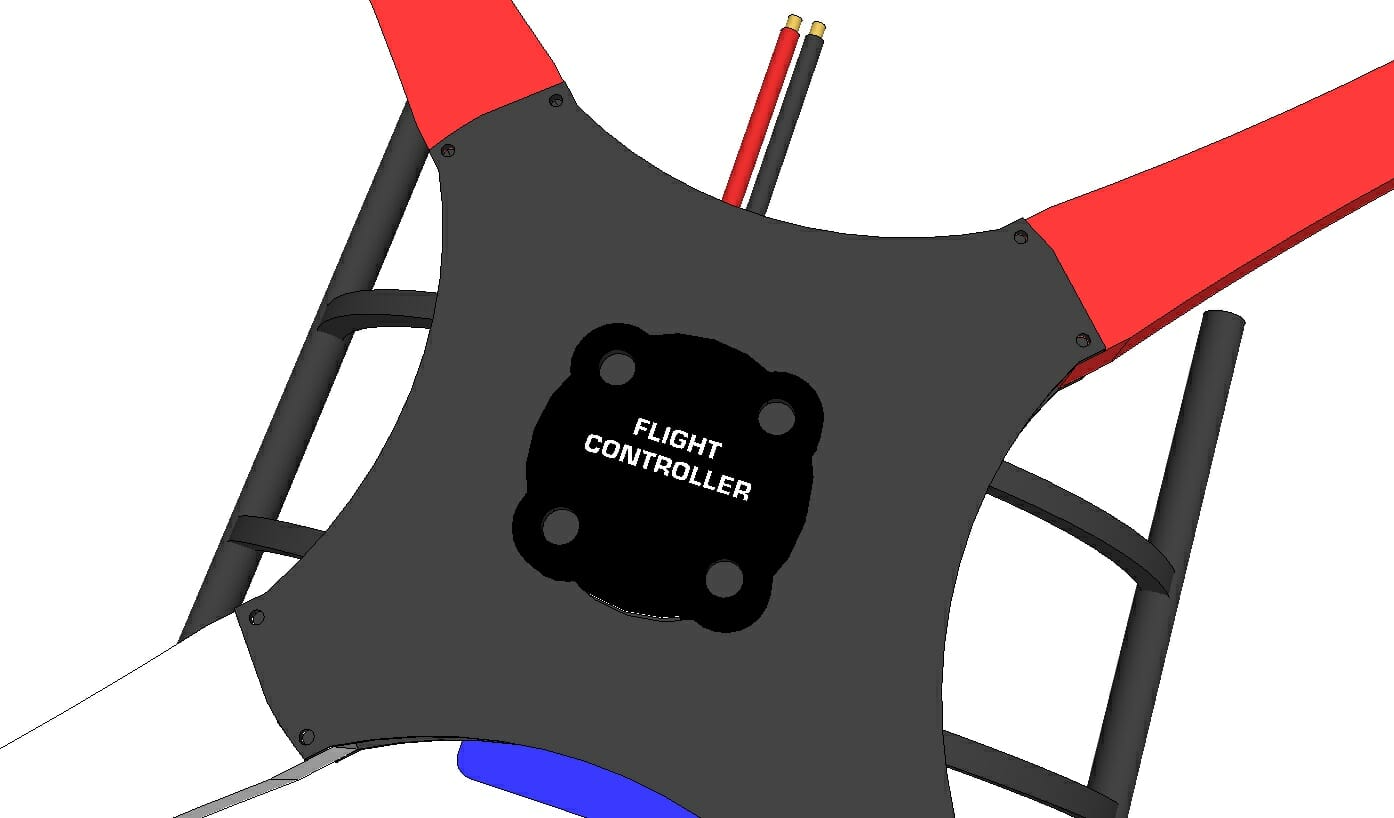
Flight Controller
- ตัวควบคุมการบินบางตัวไม่เหมือนกัน ดังนั้นขั้นตอนการตั้งค่าจึงขึ้นอยู่กับรุ่นที่คุณเลือก หากคุณยังไม่ได้อ่าน ให้ใช้เวลาในการอ่านคู่มือผู้ใช้ของตัวควบคุมการบินที่เลือกอย่างละเอียดตั้งแต่ต้นจนจบ การละเว้นรายละเอียดที่เล็กที่สุดสามารถสร้างความแตกต่างระหว่างเที่ยวบินที่ประสบความสำเร็จครั้งแรกกับการตัดค่าใช้จ่ายทั้งหมด คู่มือผู้ใช้ที่เขียนมาอย่างดีควรมีทุกสิ่งที่คุณพบในหน้านี้และอื่นๆ ดังนั้นจึงขอแนะนำให้คุณใช้บทช่วยสอนนี้เป็นรายการตรวจสอบ ไม่ใช่เพื่อทดแทน/ทดแทนคำแนะนำพื้นฐานสำหรับนักพัฒนา
- ผู้ควบคุมการบินส่วนใหญ่มีขั้นตอนทีละขั้นตอนสำหรับการเลือกการตั้งค่าสำหรับการกำหนดค่า UAV เฉพาะ รวมถึงการควบคุมค่า PID ทั้งหมด ค่าสำหรับแต่ละ (P, I และ D) สามารถปรับได้สำหรับเฟรมและรูปแบบการบินเฉพาะของคุณ จากสิ่งที่มีเสถียรภาพมากขึ้นสำหรับการใช้แพลตฟอร์มในการถ่ายภาพทางอากาศ ไปจนถึงสิ่งที่คล้ายกับเที่ยวบินกีฬา (flips, การแข่งโดรน เป็นต้น) โดยปกติแล้วจะเริ่มต้นด้วยค่าเริ่มต้นสำหรับแต่ละฟิลด์ และหากคุณมีประสบการณ์ไม่เพียงพอที่จะเปลี่ยนแปลง ขอแนะนำให้ปล่อยทุกอย่างไว้ตามเดิมจนกว่าจะถึงเที่ยวบินแรก
- คู่มือผู้ควบคุมการบินควรระบุวิธีตั้งค่า RPM ขั้นต่ำของ powerplant นั่นคือตั้งค่าความเร็วที่มอเตอร์หมุนเมื่อโหลด ในขั้นต้น คุณสามารถตั้งค่านี้ค่อนข้างต่ำ - เพียงพอที่จะเห็นเครื่องยนต์หมุน แต่ไม่มากจน UAV ถูกเคลื่อนย้ายโดยแรงขับที่สร้างขึ้น แรงขับสูงสุด หากคุณสามารถตั้งค่านี้ได้ ควรสอดคล้องกับค่าสูงสุดที่คันเร่งของชุดควบคุมของคุณสามารถให้ได้
- แง่มุมหนึ่งที่อาจกล่าวถึงในคู่มือผู้ใช้ของผู้ควบคุมการบินโดยไม่ต้องให้คำแนะนำใด ๆ คือโหมดการบินกลับไปที่ บทที่ 4 “โหมดเครื่องบิน” กำหนดว่าเซ็นเซอร์ใดที่ใช้เพื่อทำให้โดรนมีเสถียรภาพ รวมถึงหน้าที่/วัตถุประสงค์ของโดรน เซ็นเซอร์ที่พบบ่อยที่สุดบนตัวควบคุมการบิน ได้แก่ ไจโรสโคป มาตรความเร่ง บารอมิเตอร์ เข็มทิศ และอาจเป็น GPS
- หากนี่คือโดรนตัวแรกของคุณ ขอแนะนำอย่างยิ่งให้มีโหมดการบินที่เสถียรที่สุดสำหรับตัวควบคุมการบินของคุณ ซึ่งใช้เซ็นเซอร์ส่วนใหญ่ที่มีอยู่เพื่อทำให้โดรนมีเสถียรภาพ โดยทั่วไป เนื่องจากการตั้งค่าตัวควบคุม PID อาจอยู่ไกลจากเฟรม/การตั้งค่าของคุณ จึงเป็นสาเหตุที่ดีที่สุดที่จะเลือกค่าเริ่มต้นของตัวควบคุม PID หากคุณเคยบินมาก่อน โหมด ACRO (ซึ่งใช้ไจโรสโคปเท่านั้น) อาจดีที่สุด
- ผู้ควบคุมการบินส่วนใหญ่จะอนุญาตให้คุณเปลี่ยน "โหมดการบิน" ในเที่ยวบินผ่านช่องทางสำรอง ตัวอย่างเช่น หากรีโมทคอนโทรลของคุณมี 6 ช่องสัญญาณ คุณอาจพิจารณากำหนดช่องสัญญาณ 5 หรือ 6 (ซึ่งมักเกี่ยวข้องกับสวิตช์) เพื่อให้คุณสามารถเปลี่ยนโหมดการบินขณะบินโดรนได้ ก่อนบิน ตรวจสอบให้แน่ใจว่าคุณรู้ว่าตำแหน่งสวิตช์ใดที่สอดคล้องกับโหมดการบินใด
- เราไม่แนะนำอย่างยิ่งให้ใช้เที่ยวบินฮอตสปอตของ GPS หรือฟังก์ชั่น / เซ็นเซอร์ที่ซับซ้อนกว่านี้ (เช่น เซ็นเซอร์วัดระยะทางอัลตราโซนิกเพื่อกำหนดระยะห่างจากพื้น) จนกว่าคุณจะแน่ใจว่า UAV ได้รับการปรับอย่างดี คู่มือบางเล่มแนะนำให้ใช้เฉพาะโหมด ACRO (กายกรรม) อย่างไรก็ตาม หากคุณไม่มีประสบการณ์การบินที่สำคัญ การบินในโหมดนี้จะไม่สามารถทำได้ทางกายภาพสำหรับคุณ โหมดนี้จะควบคุมได้ยากที่สุด เนื่องจากไม่มีการป้องกันการสั่นไหว
การกำหนดค่าอุปกรณ์ควบคุม
- คอนโซลบางรุ่นมีโหมดการทำงานที่แตกต่างกัน เช่น เครื่องบิน เฮลิคอปเตอร์ รถยนต์ เป็นต้น ใน 4 (ส่วน: การควบคุม) เราได้พูดถึงช่องทางการควบคุมหลักสี่ช่องทาง: Throttle, Yaw, Pitch and Roll ซึ่งมักจะเป็นค่าที่เกี่ยวข้องกับเครื่องบินหรือเฮลิคอปเตอร์ หากคู่มือผู้ควบคุมการบินไม่ได้ระบุโหมดเฉพาะสำหรับเครื่องส่งสัญญาณ ขอแนะนำให้ใช้โหมดเครื่องบิน
- รีโมทคอนโทรลมีสองประเภท: โหมด 1 (โหมด 1) และโหมด 2 (โหมด 2) โหมด 2 (ธรรมดาที่สุด) ที่มีการควบคุมประเภทนี้คือ Throttle และ Yaw ที่เชื่อมโยงกับช่องซ้าย / แท่ง / จอยสติ๊ก, Pitch and Roll ทางด้านขวา คุณยังสามารถตรวจสอบการมอบหมายของพวกเขาได้อีกครั้งโดยเลื่อนแท่งไม้โดยตรงเพื่อให้แน่ใจว่าค่าจะไม่กลับด้าน
- โหมดเครื่องส่งสัญญาณมักจะเพิ่มระดับ "ออฟเซ็ต" ของช่อง / สัญญาณเพื่อให้การเคลื่อนไหวเหมาะสมยิ่งขึ้นสำหรับระบบเฉพาะอย่างไรก็ตามผู้ควบคุมการบินส่วนใหญ่ให้ความสำคัญกับการชดเชยใด ๆ และด้วยเหตุนี้จึงชอบค่า "ดิบ"หากเครื่องส่งสัญญาณของคุณไม่มีโหมดใด ๆ เพียงตรวจสอบว่าช่อง / แท่ง / จอยสติ๊กใดรับผิดชอบ
- เครื่องส่ง RC แบบเอนกประสงค์สามารถให้ช่วงสัญญาณที่จำกัดในแต่ละช่องสัญญาณเท่านั้น ดังนั้นในบทเรียนนี้ เราแนะนำให้คุณค้นหาช่วงของค่าที่เครื่องส่ง RC สามารถให้ได้ และไม่ว่าจะเป็นค่าต่ำสุดและ ค่าสูงสุดสามารถปรับได้ (หรือเป็นค่าหรือเป็นเปอร์เซ็นต์ของช่วงเริ่มต้น) ตัวอย่างเช่น ตัวควบคุมการบินที่ใช้ MultiWii ต้องการเครื่องส่งสัญญาณที่สามารถให้พัลส์เต็มรูปแบบตั้งแต่ 500ms ถึง 2500ms ในขณะที่การตั้งค่าเริ่มต้นสามารถเป็นได้เพียง 1,000ms ถึง 2000ms เนื่องจากเป็นการกำหนดค่าทั่วไปสำหรับเครื่องบิน R / C อ่านคู่มือเครื่องส่งสัญญาณของคุณสำหรับวิธีตั้งค่าจุดสิ้นสุด/ช่วงสัญญาณ (ถ้ามี)
- หากคอนโทรลเลอร์ของคุณมีจอ LCD คุณมักจะทำได้ผ่านอินเทอร์เฟซภายใต้ "การตั้งค่า"
- “การทดสอบอุปกรณ์ควบคุมสูงสุด ระยะทาง” ใช้งานได้ง่ายที่สุดด้วยความช่วยเหลือของเพื่อน / ผู้ช่วยหรือเชื่อมต่อออดหรือข้อเสนอแนะภาพ / เสียงอื่น ๆ กับโดรน RC รุ่นที่สูงกว่าบางรุ่นมีฟังก์ชันการทดสอบช่วง เป้าหมายของการทดสอบคือการดูว่าสัญญาณเดินทางไกลแค่ไหนก่อนที่เครื่องรับจะรับไม่ได้อีกต่อไป ขอแนะนำให้ใช้การทดสอบช่วงหลังจากที่เรียกว่า "เที่ยวบินต่อสู้" เท่านั้น (เที่ยวบินต่อสู้ - โดรนได้รับการทดสอบประสิทธิภาพในระยะทางสั้น ๆ ในระยะสายตาของนักบินโดรน) ขั้นตอนการทดสอบพิสัย:
- เปิดอุปกรณ์ควบคุมจากนั้นจึงขึ้นเครื่องบิน
- ถอยกลับ 15 เมตรและเปิดใช้งานสวิตช์ที่เกี่ยวข้องกับออด คุณต้องได้ยินเขา
- หากคุณไม่มีออด ให้เปิดเครื่องบินและตรวจสอบให้แน่ใจว่าเครื่องยนต์กำลังทำงานอยู่
- ปิดเสียงกริ่ง / เปิดเสียงขึ้นจมูก
- ทำซ้ำขั้นตอนเหล่านี้ต่อไป (แนวสายตา) จนกว่าโดรนจะตอบสนองต่อข้อมูลที่คุณป้อน
- นี่จะเป็นระยะทางสูงสุดที่คุณสามารถบินโดรนได้
- คุณอาจคิดว่าคุณไม่ได้วางแผนที่จะบินไปไกลขนาดนั้น แต่จำไว้ว่าเสียงหึ่งๆ กำลังเคลื่อนที่เป็นสามแกนและอาจมีบางอย่างผิดพลาด
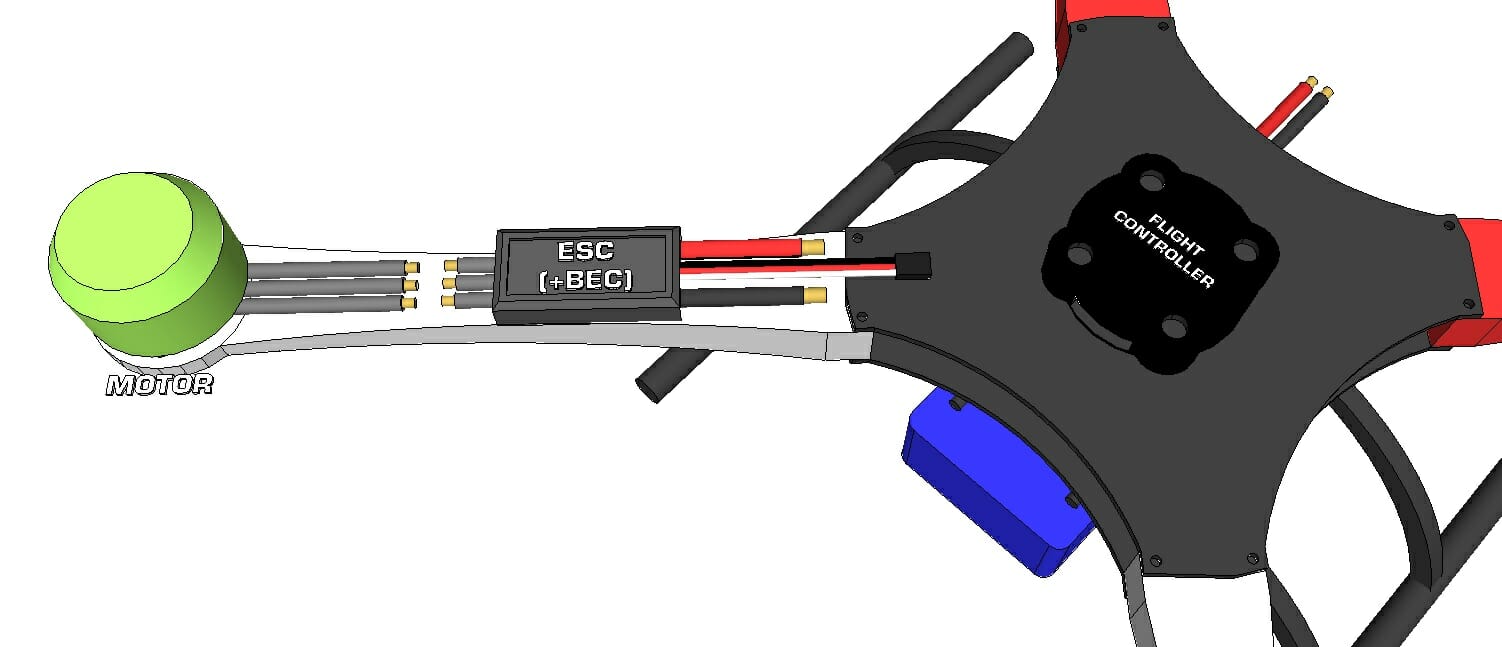
การปรับเทียบ ESC
ESC จะทำงานนอกกรอบ แต่สัญญาณ (PWM / PWM) ที่เกี่ยวข้องกับเค้นต่ำสุดและสูงสุดอาจไม่ตรงกับสิ่งที่ให้ เครื่องส่งสัญญาณของคุณ ดังนั้น คุณต้อง "ฝึก" ESC แต่ละรายการด้วยค่าที่จำเป็น ตรวจสอบให้แน่ใจว่าไม่ได้ติดตั้งใบพัดบนมอเตอร์ โปรดดูคู่มือผู้ใช้ของผู้ควบคุมการบินของคุณ หลังจากการตั้งโปรแกรมใหม่ ESC จะคงการกำหนดค่าปัจจุบันไว้แม้ว่าจะไม่ได้ใช้พลังงานก็ตาม ดังนั้น ESC แต่ละตัวจะถูกตั้งโปรแกรมเพียงครั้งเดียวในระหว่างการทดสอบ / การตั้งค่าเริ่มต้น
โดยปกติจะมีส่วนในคู่มือควบคุมการบินที่อธิบายวิธีการปรับเทียบ ESC และอธิบายวิธีการทำ ถ้าไม่ คุณสามารถลองใช้วิธีใดวิธีหนึ่งที่แนะนำด้านล่างนี้อีกครั้ง หากคุณยังไม่ได้ถอดใบพัดออก ก็ถึงเวลาที่ต้องดำเนินการดังกล่าว
เครื่องส่งสัญญาณ
- เชื่อมต่อ ESC หนึ่งตัวเข้ากับหมุด "คันเร่ง" บนเครื่องรับของคุณ หาก ESC ของคุณไม่มี BEC เชื่อมต่ออยู่ คุณสามารถเชื่อมต่อ ESC ที่เปิดใช้งาน BEC หนึ่งตัวกับพินอื่นบนตัวรับสัญญาณ (เช่น อินพุตแบตเตอรี่) เพียงเพื่อจ่ายพลังงานให้กับเครื่องรับ
- เชื่อมต่อ ESC กับมอเตอร์ที่เหมาะสม (หากยังไม่ได้เชื่อมต่อ)
- ตั้งค่าคันเร่ง / จอยสติ๊กที่เกี่ยวข้องกับ "คันเร่ง" เป็นค่าสูงสุด (โดยปกติคือแท่งซ้าย / จอยสติ๊กและเดินหน้าเต็ม / ขึ้น) จากนั้นเปิดเครื่องส่งสัญญาณ
- เชื่อมต่อแบตเตอรี่ LiPo กับแผงจ่ายไฟหรือต่อกับ ESC นี้โดยตรง (หากขั้วต่อเข้ากันได้)
- เครื่องยนต์ควรส่งเสียงบี๊บสามครั้ง (11.1V LiPo) ตามด้วยการหยุดชั่วขณะสั้นๆ ตามด้วยเสียงบี๊บสั้นๆ สองครั้ง (ซึ่งเป็นเสียงบี๊บสูงสุด)
- ทันทีหลังจากเสียงบี๊บสั้นๆ ให้เลื่อนคันเร่ง / จอยสติ๊กไปที่ตำแหน่งต่ำสุด (ซึ่งเป็นเสียงบี๊บขั้นต่ำ)
- เครื่องยนต์ควรส่งเสียงบี๊บสามครั้ง (11.1V LiPo) ตามด้วยเสียงบี๊บยาว
- ระยะปีกผีเสื้อสำหรับ ESC นี้ได้รับการตั้งค่าแล้ว ให้ไปยังช่วงถัดไปจนกว่าจะปรับเทียบ ESC ทั้งหมดแล้ว
วิธีอื่นๆ
ปฏิบัติตามคำแนะนำในคู่มือผู้ใช้ผลิตภัณฑ์เพื่อให้ตรงกับช่วงต่ำสุด/สูงสุดของสัญญาณอินพุต ESC กับสิ่งที่จะได้รับจากเครื่องส่งสัญญาณ
- USB: ESC บางรุ่นสามารถตั้งโปรแกรมผ่าน USB ได้ทั้งแบบอิสระหรือใช้อะแดปเตอร์
- คณะกรรมการการเขียนโปรแกรม: คณะกรรมการการเขียนโปรแกรม ESC ภายนอก สามารถใช้ได้กับ ESC เกือบทุกชนิดและเป็นอุปกรณ์แบบสแตนด์อโลน
- ไมโครคอนโทรลเลอร์: วิธีนี้ไม่ได้ใช้กันอย่างแพร่หลาย แต่เป็นไปได้ที่จะตั้งโปรแกรม ESC ใหม่ด้วยไมโครคอนโทรลเลอร์หากคุณมีรหัสที่ถูกต้องและสามารถเชื่อมต่อได้อย่างถูกต้อง
- ตัวควบคุมการบิน: ตัวควบคุมการบินบางตัวอนุญาตให้คุณปรับเทียบหรือตั้งโปรแกรม ESC ผ่านอินเทอร์เฟซการเขียนโปรแกรม อ่านคำแนะนำสำหรับผู้ควบคุมการบินของคุณเพื่อดูว่าเป็นไปได้หรือไม่
มอเตอร์และโรเตอร์หลัก (ใบพัด) ทิศทาง.
ตอนนี้คุณพร้อมที่จะติดตั้งใบพัดแล้ว กลับไปที่ 3 บทเรียน ซึ่งกล่าวถึงทิศทางของโรเตอร์หลักเพื่อสร้างแรงขับ ใบพัดทั้งหมดมีด้านบนและด้านล่าง และทิศทางการหมุน CW (ตามเข็มนาฬิกา) และ CCW (ทวนเข็มนาฬิกา) โดยปกติจะมีข้อความที่ด้านบนของเสาระบุความสูงและเส้นผ่านศูนย์กลาง เมื่อใบพัดติดตั้งอยู่บนแกนมอเตอร์ ส่วนบนนี้จะชี้ขึ้นสู่ท้องฟ้า ไม่ว่ามอเตอร์จะติดตั้งอยู่ที่ด้านบนของลำโดรนหรือด้านล่างของโดรนก็ตาม

Pilot Preflight Checklist
แม้ว่าเสียงพึมพำจะไม่ซับซ้อนหรือเป็นอันตรายเหมือนเครื่องบินพาณิชย์จริง ๆ คุณ - ในฐานะนักบิน และต้องมีรายการตรวจสอบก่อนบินเพื่อให้แน่ใจว่าเที่ยวบินที่จะมาถึงจะไม่เป็นอันตรายต่อบุคคลหรือทรัพย์สิน รายการด้านล่างครอบคลุมเฉพาะสิ่งจำเป็นและต้องดำเนินการก่อนแต่ละเที่ยวบิน (ไม่เฉพาะก่อนเที่ยวบินแรกเท่านั้น)
- ตรวจสอบให้แน่ใจว่าคุณมีอุปกรณ์ช่วยการมองเห็นที่สามารถบอกได้ว่าโดรนของคุณอยู่ด้านหน้าด้านใด อย่างน้อย ให้เพิ่มเทปสีที่คานหน้าทั้งสองข้าง
- ตรวจสอบให้แน่ใจว่าได้ชาร์จแบตเตอรี่อุปกรณ์ควบคุมแล้ว
- เขย่า UAV เบา ๆ - ไม่มีอะไรจะคลาย สั่น หรือตกลงไปที่พื้น คุณจะไม่มีทางรู้ว่าสิ่งใดที่อาจต้องพลัดถิ่นหรือแตกหักอันเป็นผลมาจากการลงจอดอย่างหนักในเที่ยวบินก่อนหน้า
- ตรวจสอบให้แน่ใจว่าใบพัดยังคงติดแน่น
- เปิดอุปกรณ์ควบคุมก่อน แล้วจึงเปิดเครื่อง (เอามือออกจากโรเตอร์)
- ตรวจสอบให้แน่ใจว่าคุณสามารถวางแขนและจัดตำแหน่งมอเตอร์ได้อย่างน่าเชื่อถือ (ควรหมุนที่รอบต่ำเมื่อ "แขน" และหยุดหมุนเมื่อ "ปลดอาวุธ")
- ตรวจสอบให้แน่ใจว่าคุณปรับเทียบหรือเซ็นเซอร์ทำงานได้ดี ปรับเทียบแล้ว (คุณต้องทำเช่นนี้เป็นประจำ)
- ตรวจสอบช่วงของเครื่องส่งสัญญาณ
- ตรวจสอบให้แน่ใจว่าพื้นที่การบินนั้นชัดเจน และถ้ามีใครอยู่ในนั้น ให้แจ้งโดยเฉพาะอย่างยิ่งเด็กที่อยากรู้อยากเห็น ว่าคุณกำลังบิน UAV และคุณไม่ควรเข้าใกล้จนกว่าโดรนจะลงจอดโดยที่มอเตอร์หยุดสนิท

การทดสอบ
จนกว่าคุณจะได้รับความมั่นใจเพียงพอในความสามารถของคุณในฐานะนักออกแบบนักบินและโดรน ขั้นตอนต่อไปนี้คือ แนะนำให้ทุกคนใช้อากาศยานไร้คนขับก่อนเที่ยวบินแรก
- เปิดเครื่องยนต์และตรวจสอบให้แน่ใจว่าหมุนไปในทิศทางที่ถูกต้องตามที่อธิบายไว้ในคู่มือผู้ควบคุมการบิน
- ยกคันเร่ง / จอยสติ๊กขึ้นช้าๆ และตรวจสอบให้แน่ใจว่าใบพัดดันอากาศลงไปที่พื้น การใช้กระดาษทิชชู่เป็นทางเลือกที่ปลอดภัยสำหรับการตรวจด้วยสายตา
- ขยับคันโยก Pitch / จอยสติ๊กไปข้างหน้า / ข้างหลังอย่างระมัดระวังเพื่อให้แน่ใจว่าโดรนเอียงไปข้างหน้า / ข้างหลังอย่างถูกต้อง
- ค่อยๆ ขยับแท่งโรล / จอยสติ๊กไปแต่ละด้านเพื่อให้แน่ใจว่าโดรนตอบสนองอย่างถูกต้อง
หากโดรนทำงานไม่ถูกต้อง มีหลายสาเหตุที่เป็นไปได้ โดยสาเหตุที่พบบ่อยที่สุดคือ
- มอเตอร์ตั้งแต่หนึ่งตัวขึ้นไปกำลังหมุนไปผิดทิศทาง
- ตัวควบคุมการบินไม่ได้รับการติดตั้งอย่างถูกต้อง และสิ่งที่ถือว่า "ไปข้างหน้า" นั้นแตกต่างจาก UAV จริงของคุณ
- หน้าสัมผัสอย่างน้อยหนึ่งรายการระหว่างเครื่องรับและตัวควบคุมการบินไม่ได้เชื่อมต่ออย่างถูกต้องหรือแม้แต่ผิดที่
- บางทีทุกอย่างอาจได้รับการตั้งค่าอย่างถูกต้อง เร็วเกินไปหรือฉับพลันเกินไปที่จะตอบสนองต่อการป้อนข้อมูลของผู้ใช้
แผนฉุกเฉิน
เพิ่งเริ่มทำงานในสนามและ / หรือด้วยโดรนตัวใหม่ รายการด้านล่างมีจุดมุ่งหมายเพื่อให้คุณได้นึกถึงสิ่งต่างๆ และแนวคิดบางประการเกี่ยวกับวิธีและเหตุผลในการตอบสนองต่อนักบินที่ทะเยอทะยาน การตัดสินใจเป็นกรณีๆ ไป และในบางสถานการณ์อาจขัดแย้งกับสิ่งที่เสนอในที่นี้ ทำความรู้จักตัวเอง รู้จักสิ่งรอบตัว และระวัง! ในเกือบทุกกรณี การทำเสียงหึ่งๆ หาย จะดีกว่าการเสี่ยงชนกับผู้คนหรือทรัพย์สิน
โดรนนั้นอยู่ไกลมาก และเจ้าไม่รู้ว่ามันไปทางไหน
- ลดเค้นและสังเกตว่าเสียงหึ่งๆตอบสนองหรือไม่ (ตรวจสอบว่ามีการเชื่อมต่อหรือไม่)
- หากโดรนตอบสนองต่อแก๊ส ให้ลองลงจอดที่นั่น (ถ้าทำได้)
- หากสถานที่นี้ไม่เหมาะสำหรับการลงจอด ให้พยายามชี้โดรนไปข้างหน้าอย่างระมัดระวัง (ไม่มีอะไรรุนแรง) และหากโดรนตอบสนองโดยอาศัยตำแหน่งของคุณ การเคลื่อนไปทางซ้ายหรือขวาบนท้องฟ้าจะช่วยให้คุณกำหนดได้ การวางแนวของมัน หากดูเหมือนว่าจะไม่เคลื่อนไปทางซ้ายหรือขวา มันอาจจะเคลื่อนเข้าหาคุณหรืออยู่ห่างจากคุณ ดังนั้นให้ยกเลิกสิ่งที่คุณเพิ่งทำและลองกำจัดสิ่งสกปรกออกไปทางซ้าย
ทันใดนั้นเสียงพึมพำก็เลี้ยวออกนอกเส้นทางอย่างรวดเร็ว (โดยมีเหตุผลหรือไม่มีเหตุผล)
- หากคุณไม่มีความชำนาญในการขับเครื่องบิน (เพื่อพยายามฟื้นฟู) ให้ปล่อยคันเร่งออกให้หมดแล้วปล่อยทิ้ง ในกรณีนี้ การไตร่ตรองถึงการกระทำที่รุนแรงอาจทำให้คุณสูญเสียการมองเห็น ของโดรนหรือที่แย่ไปกว่านั้นคือ โดรนจะเริ่มไต่ตกจากระยะไกลมากขึ้น
โดรนกำลังเคลื่อนเข้าหาผู้คนอย่างรวดเร็ว
- เติมแก๊สให้สูงสุดเพื่อให้ได้รับระดับความสูงและบินเหนือพวกมัน โดรนของคุณน่าจะยังอยู่ในทิศทางที่ถูกต้อง ดังนั้นการทำโดรนหายจึงดีกว่าบินเข้าหาคน
- หลังจากไปถึงระดับความสูงที่เหมาะสมแล้ว พยายามควบคุมอีกครั้ง จากนั้นจัดตำแหน่งให้อยู่เหนือพื้นที่ลงจอดที่ชัดเจน
โดรนกำลังเคลื่อนที่เข้าหาคุณอย่างรวดเร็ว
- แก๊สเป็นศูนย์ ให้เขากระแทกพื้นดีกว่าบินเข้าไปในหัวของคุณ
โดรนไม่ตอบสนองต่ออินพุตจากอุปกรณ์ควบคุม
- ในกรณีนี้ คุณไม่สามารถทำอะไรได้ หากโดรนของคุณยังลอยอยู่ในอากาศ แบตเตอรี่ของรีโมตคอนโทรลของคุณอาจหมดลง
เสียงพึมพำสูญเสียใบพัด
- การสูญเสียใบพัดส่งผลกระทบต่อทั้งแรงขับและการหันเห พยายามหันเค้นให้ตรงก่อน (คุณอาจต้องถือคันเร่ง / จอยสติ๊กที่เชื่อมต่อกับการหันเหในตำแหน่งสุดขีด) จากนั้นในเวลาเดียวกันค่อย ๆ ขยับคันเร่ง / คันเร่งขึ้นเพื่อป้องกันการชน จากนั้นคันเร่งลง.
เที่ยวบินแรก
โดยไม่คำนึงถึงประสบการณ์การบินครั้งก่อนของคุณ เที่ยวบินแรกของคุณ โดยเฉพาะอย่างยิ่งกับ UAV แบบหลายเครื่องยนต์ ควรรอบคอบที่สุดเท่าที่จะทำได้ จุดประสงค์ของเที่ยวบินแรกคือเพื่อให้แน่ใจว่าทุกอย่างได้รับการตั้งค่าอย่างถูกต้อง ตลอดจนระบุปัญหาร้ายแรงต่างๆ
- ที่ตั้ง: พื้นที่เปิดโล่ง ห่างจากอาคาร ผู้คน และทรัพย์สิน ตัวอย่างเช่น สนามฟุตบอลที่ว่างเปล่า สนามเบสบอล และอื่นๆ น่าจะเหมาะ ไม่ควรมีลมเลย
- ผ่านรายการตรวจสอบก่อนบินของนักบิน
- ยืนห่างจากโดรนประมาณ 2 เมตร โดยให้ด้านหน้าของโดรนหันออกจากคุณ
- ติดแขนมอเตอร์
- ค่อยๆ ขยับคันเร่ง / จอยสติ๊กขึ้น ถึงจุดที่โดรนพร้อมที่จะบิน อาจมีเอฟเฟกต์พื้นบางอย่างที่ทำให้โดรนเด้งเล็กน้อย แต่ไม่ต้องกังวล
- เพิ่มเค้นเพื่อเอาโดรนออกจากพื้นและทำความคุ้นเคยกับการควบคุม - พยายามให้มันอยู่ในรัศมีที่กำหนดและดูว่ามันจะตอบสนองต่อการเคลื่อนไหวของแท่ง / จอยสติ๊กของคุณอย่างไร
- ทำการเคลื่อนไหวทีละน้อยทีละน้อยและลื่นไหล — ไม่มีอะไรกะทันหันเกินไป ลดคันเร่งเพื่อป้องกันการเกิดอุบัติเหตุ
- หากโดรนของคุณไม่ทำงานตามที่คาดไว้ (เช่น การเคลื่อนแกน "Pitch" นำไปสู่ระดับเสียง เช่นเดียวกับการหมุนไปทางซ้ายหรือขวา) มีบางอย่างผิดปกติ และคุณจะต้องค้นหา สาเหตุของปัญหาที่ระบุ...
- หากโดรนทำงานตามที่คาดไว้ งานของคุณคือรักษาตำแหน่งให้คงที่ที่ความสูง 1.2-2 เมตรจากพื้นดิน อย่าโกรธเร็วนักเลย


.เที่ยวบินเพิ่มเติม
ตอนนี้คุณได้แก้ไขข้อบกพร่องและบิน ในสภาพแวดล้อมที่มีการควบคุมอย่างสะดวกสบาย คุณสามารถต่อเที่ยวบินที่สองได้
- เนื่องจากโดรนยังไม่ผ่านการทดสอบอย่างสมบูรณ์ เราจึงแนะนำให้ทำตามขั้นตอนก่อนการบินอย่างเต็มรูปแบบสำหรับเที่ยวบินแรก ซึ่งไม่น่าจะใช้เวลานาน
- ใช้การเคลื่อนไหวที่ราบรื่น ทำความคุ้นเคยกับปฏิกิริยาของโดรนต่อการเคลื่อนไหวของไม้เท้า/ไม้เท้าของคุณโดยรักษาระยะห่างที่ปลอดภัย
- การปรับให้เข้ากับการขับโดรนควรทำโดยปราศจากความช่วยเหลือจาก FPV และเซ็นเซอร์ต่างๆ







