Contenuti
- Drone fai da te: Lezione 1. Terminologia.
- Drone fai da te: Lezione 2. Cornici.
- Drone fai-da-te: lezione 3. Centrale elettrica.
- Drone fai-da-te: lezione 4. Controllore di volo.
- Drone fai da te: Lezione 5. Assemblaggio.
- Drone fai-da-te: lezione 6. Controllo delle prestazioni.
- Drone fai da te: lezione 7. FPV e distanza.
- Drone con le tue mani: Lezione 8. Aerei.
Introduzione
Nella lezione 5, dovevi finire di assemblare il drone (senza installare le eliche). Prenditi il tuo tempo, poiché anche piccoli errori possono portare a un incidente. Hai ancora alcuni passaggi prima del tuo primo volo, quindi sii paziente e segui le linee guida di seguito. Come nella lezione precedente, continueremo a presumere che utilizzi apparecchiature di controllo radio per interagire con l'UAV (come il metodo di controllo più utilizzato al momento).
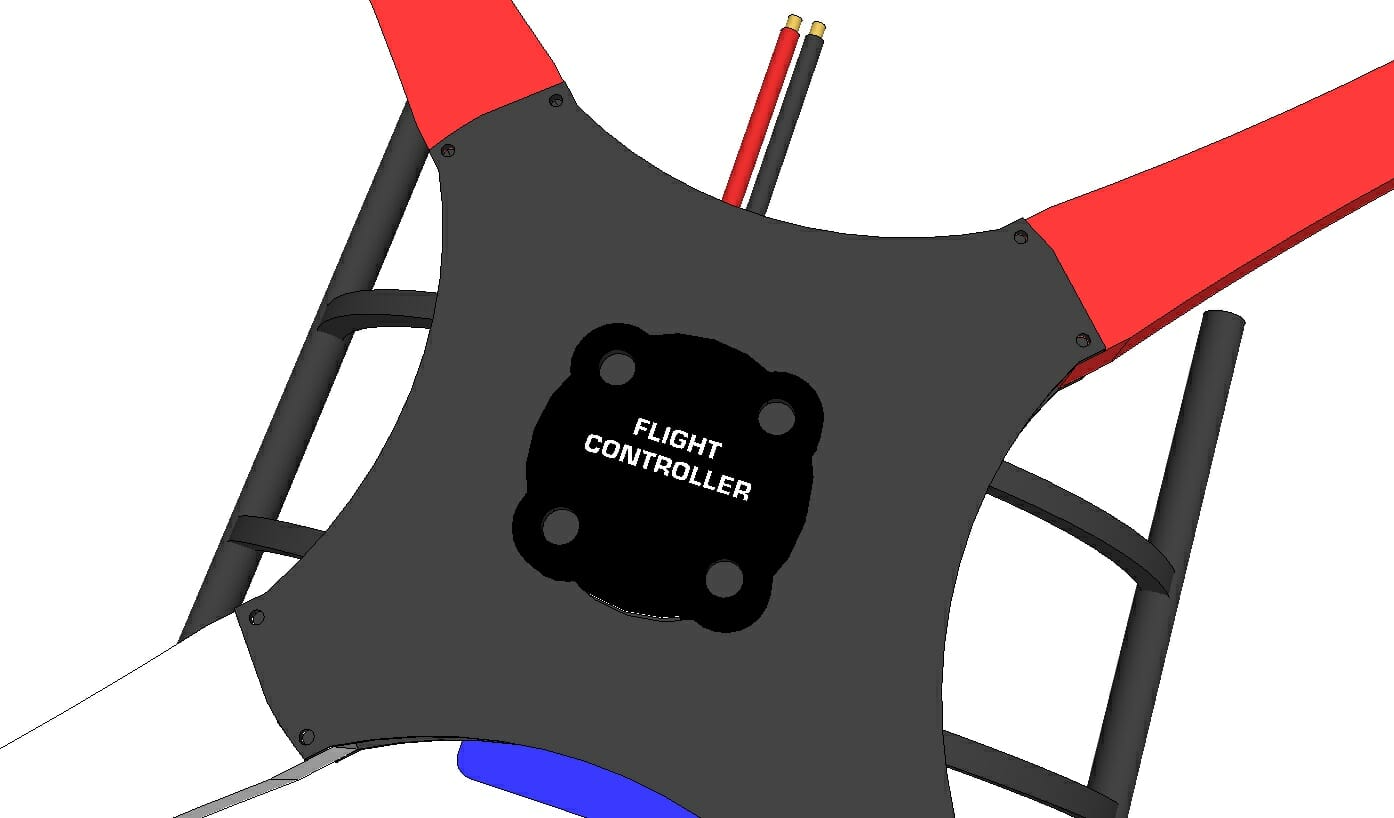
Controllore di volo
- Non tutti i controllori di volo sono uguali, quindi la procedura di configurazione dipende molto dal modello scelto. Se non l'hai già fatto, prenditi il tempo necessario per leggere attentamente il manuale dell'utente del controller di volo selezionato dall'inizio alla fine. L'omissione del più piccolo dettaglio può fare la differenza tra un primo volo di successo e una cancellazione completa. Un manuale utente ben scritto dovrebbe includere tutto ciò che trovi in questa pagina e altro, quindi si consiglia di utilizzare questo tutorial come elenco di controllo e non come sostituzione/alternativa alle istruzioni di base per gli sviluppatori.
- La maggior parte dei controllori di volo fornisce una procedura passo passo per selezionare le impostazioni per una specifica configurazione UAV, incluso il pieno controllo sui valori PID. I valori per ciascuno (P, I e D) possono essere regolati per il tuo telaio specifico e il tuo stile di volo; da qualcosa di più stabile per l'utilizzo della piattaforma nella fotografia aerea, a qualcosa di più simile ai voli sportivi (lanci, corse di droni, ecc.). Di solito inizia con i valori predefiniti per ogni campo e, se non si ha abbastanza esperienza per modificarli, si consiglia di lasciare tutto così com'è fino al primo volo.
- Il manuale del controllore di volo dovrebbe anche indicare come impostare il regime minimo del propulsore, ovvero impostare la velocità alla quale i motori ruotano quando sono caricati. Inizialmente, puoi impostare questo valore relativamente basso, quanto basta per vedere i motori girare, ma non così tanto che gli UAV vengono mossi dalla spinta che generano. La spinta massima, se è possibile impostare questo valore, dovrebbe corrispondere al valore massimo che può fornire lo stick del gas della vostra apparecchiatura di comando.
- Un aspetto che può essere discusso nel manuale dell'utente del controllore di volo senza dare alcun suggerimento è la modalità di volo. Tornando alla Lezione 4, "Modalità di volo" determina quali sensori vengono utilizzati per stabilizzare il drone, nonché la sua funzione / scopo. I sensori più comuni trovati su un controller di volo sono giroscopio, accelerometro, barometro, bussola e possibilmente GPS.
- Se questo è il tuo primo drone, si consiglia vivamente di avere la modalità di volo più stabile disponibile per il controller di volo, che utilizza la maggior parte dei sensori disponibili per stabilizzare il drone. In generale, ciò è dovuto al fatto che le impostazioni del controller PID potrebbero essere troppo lontane dal frame/dalle impostazioni, motivo per cui è meglio scegliere i valori del controller PID predefiniti. Se hai già volato, la modalità ACRO (che utilizza solo il giroscopio) potrebbe essere la migliore.
- La maggior parte dei controllori di volo ti consentirà anche di modificare la "modalità di volo" in volo tramite un canale di backup. Ad esempio, se il tuo telecomando ha sei canali, potresti prendere in considerazione l'assegnazione del canale 5 o 6 (che sono spesso associati agli interruttori) in modo da poter cambiare la modalità di volo durante il volo del drone. Prima di volare, assicurati di sapere quale posizione dell'interruttore corrisponde a quale modalità di volo.
- È fortemente sconsigliato utilizzare il volo hotspot GPS o altre funzioni/sensori più sofisticati (ad esempio, un sensore di distanza ad ultrasuoni per determinare la distanza dal suolo) fino a quando non si è sicuri che l'UAV sia ben sintonizzato. Alcuni manuali suggeriscono di utilizzare solo la modalità ACRO (acrobatica), tuttavia, se non hai esperienza di volo significativa, volare in questa modalità non sarà fisicamente possibile per te, la modalità è la più difficile da controllare, poiché la stabilizzazione è esclusa.
Configurazione delle apparecchiature di controllo
- Alcune console hanno diverse modalità di funzionamento, come aereo, elicottero, automobile ecc. In 4 (Sezione: Controllo) abbiamo discusso i quattro principali canali di controllo: Throttle, Yaw, Pitch e Roll, che di solito sono valori associati ad aerei o elicotteri. Se il manuale del controller di volo non specifica una modalità specifica per il trasmettitore, si consiglia di utilizzare la modalità aereo.
- Esistono due tipi di telecomando: Modalità 1 (Modalità 1) e Modalità 2 (Modalità 2). La modalità 2 (più comune) con questo tipo di controllo è Throttle e Yaw associata al canale/stick/joystick di sinistra, Pitch e Roll con la destra. Puoi anche ricontrollare la loro assegnazione spostando direttamente gli stick per assicurarti che i valori non siano invertiti.
- Le modalità del trasmettitore spesso aggiungono livelli di "offset" di canale / segnale per rendere il movimento più adatto a un particolare sistema, tuttavia la maggior parte dei controllori di volo si preoccupa di qualsiasi offset e, come tale, preferisce i valori "grezzi". Se il tuo trasmettitore non ha alcuna modalità, controlla quale canale / stick / joystick è responsabile di quale.
- Un trasmettitore RC per uso generico può fornire solo una gamma limitata di segnali su ciascun canale, e quindi in questa lezione ti consigliamo di scoprire quale intervallo di valori può fornire un trasmettitore RC e se il minimo e i valori massimi possono essere regolati (o come valori o come percentuale dell'intervallo predefinito). Ad esempio, i controller di volo basati su MultiWii richiedono trasmettitori in grado di fornire una gamma completa di impulsi da 500 ms a 2500 ms, mentre l'impostazione predefinita può essere solo da 1000 ms a 2000 ms poiché questa è una configurazione comune per i velivoli R/C. Leggere il manuale del trasmettitore per scoprire come impostare i punti finali del segnale/la portata (se applicabile).
- Se il controller dispone di un display LCD, spesso è possibile farlo tramite l'interfaccia in "Impostazioni".
- “Prova delle apparecchiature di controllo a max. Distanza” è più facile da implementare con l'aiuto di un amico/assistente, oppure collegare un cicalino o altro feedback visivo/acustico al drone RC. Alcuni modelli di fascia alta hanno una funzione di test della portata. L'obiettivo del test è vedere fino a che punto viaggia il segnale prima che il ricevitore non possa più captarlo. Si consiglia di utilizzare il test di portata solo dopo il cosiddetto "Fight flight" (Fight flight - il drone viene testato per le prestazioni a breve distanza, all'interno della linea di vista del pilota-drone). Procedura di test della portata:
- Accendere l'apparecchiatura di controllo, quindi l'aereo.
- Fare un passo indietro di 15 metri e attivare l'interruttore associato al cicalino; Devi sentirlo.
- Se non si dispone di un cicalino, accendere l'aereo e assicurarsi che i motori siano accesi.
- Silenzia il cicalino / riarma il drone
- Ripeti questi passaggi sempre più avanti (linea di vista) finché il drone non risponde al tuo input.
- Questa sarà la distanza massima assoluta a cui puoi far volare il tuo drone.
- Potresti pensare di non volerlo volare così lontano, ma ricorda che il drone si muove su tre assi e qualcosa potrebbe andare storto.
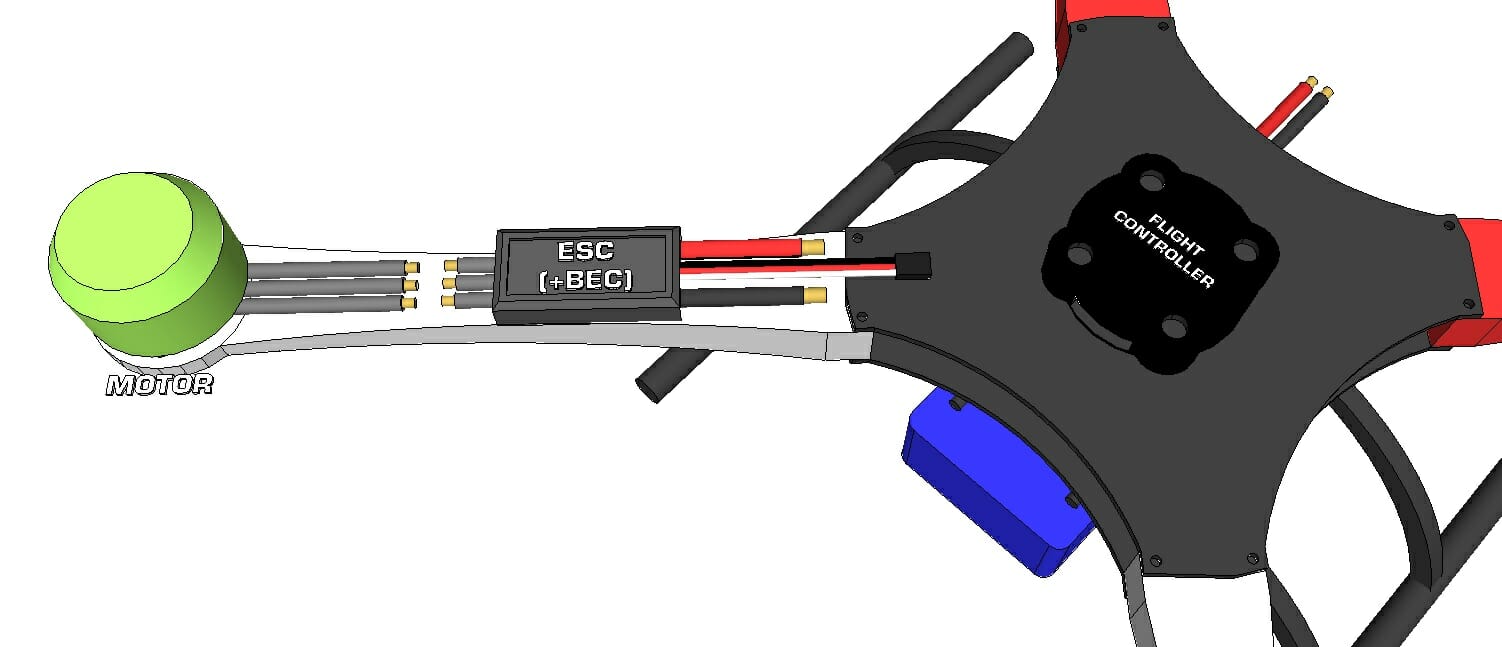
Calibrazione ESC
ESC funzionerà immediatamente, ma i segnali (PWM / PWM) associati all'acceleratore minimo e massimo potrebbero non corrispondere a ciò che fornisce il tuo trasmettitore Pertanto, è necessario "addestrare" ogni ESC con i valori richiesti. Assicurarsi che le eliche non siano montate sui motori. Fare riferimento al manuale utente del controller di volo. Dopo la riprogrammazione, l'ESC mantiene la sua configurazione attuale anche quando non è alimentato. Pertanto, ogni ESC viene programmato una sola volta, durante il test/setup iniziale.
Di solito c'è una sezione nel manuale del controller di volo che spiega come calibrare l'ESC e spiega come farlo. In caso contrario, puoi provare uno dei metodi suggeriti di seguito. Ancora una volta, se non hai ancora rimosso le eliche, è ora di farlo.
Trasmettitore
- Collegare un ESC al pin "Throttle" sul ricevitore. Se il tuo ESC non ha un BEC collegato, puoi collegare un ESC abilitato per BEC a un altro pin sul ricevitore (come l'ingresso della batteria) semplicemente per fornire alimentazione al ricevitore.
- Collegare l'ESC al motore appropriato (se non già collegato).
- Portare la levetta/joystick associata a “Throttle” al massimo (di solito la levetta sinistra/joystick e tutto avanti/su), quindi accendere il trasmettitore.
- Collegare la batteria LiPo alla scheda di distribuzione dell'alimentazione o direttamente a questo ESC (se i connettori sono compatibili).
- Il motore dovrebbe emettere tre segnali acustici (11,1 V LiPo) seguiti da una breve pausa seguita da due brevi segnali acustici (che è il segnale acustico massimo).
- Immediatamente dopo brevi segnali acustici, spostare lo stick del motore/joystick nella posizione più bassa (che è il segnale acustico minimo).
- Il motore dovrebbe emettere tre segnali acustici (11,1 V LiPo) seguiti da un lungo segnale acustico.
- La gamma del gas per questo ESC è ora impostata, passare a quella successiva fino a quando tutti gli ESC sono stati calibrati.
Altri metodi
Seguire le istruzioni nel manuale utente del prodotto per far corrispondere l'intervallo minimo/massimo del segnale di ingresso dell'ESC a quello che riceverà dal trasmettitore.
- USB: Alcuni modelli di ESC sono programmabili tramite USB, indipendentemente o con un adattatore.
- Scheda di programmazione: Scheda di programmazione ESC esterna, può essere utilizzata con quasi tutti gli ESC ed è un dispositivo autonomo.
- Microcontrollore: Questo metodo non è molto utilizzato, ma è certamente possibile riprogrammare l'ESC con un microcontrollore se si dispone del codice corretto e si può connettersi correttamente.
- Controllore di volo: Alcuni controllori di volo consentono di calibrare o programmare gli ESC attraverso la loro interfaccia di programmazione. Leggi le istruzioni per il tuo controllore di volo per vedere se questo è possibile.
Motore e rotore principale (elica). Direzione.
Ora sei pronto per installare le eliche. Torniamo alla 3 lezione, che discute la direzione del rotore principale per creare la spinta. Tutte le eliche hanno un senso di rotazione superiore e inferiore e un senso di rotazione CW (in senso orario) e CCW (in senso antiorario). Di solito c'è un testo nella parte superiore di un puntello che ne indica l'altezza e il diametro. Quando l'elica è montata sull'albero del motore, questa parte superiore punta verso il cielo, indipendentemente dal fatto che il motore sia montato sulla parte superiore del raggio del drone o sul fondo del drone.

Pilot Preflight Checklist
Sebbene il drone non sia complesso o pericoloso come un vero aereo commerciale, tu - come pilota e deve disporre di una lista di controllo pre-volo per assicurarsi che il volo imminente non metta in pericolo persone o proprietà. L'elenco che segue copre solo l'essenziale e deve essere eseguito prima di ogni volo (non solo prima del primo).
- Assicurati di avere a disposizione uno qualsiasi degli aiuti visivi per dire quale lato del tuo drone è davanti. Come minimo, aggiungi del nastro colorato alle due travi anteriori.
- Assicurarsi che la batteria dell'apparecchiatura di controllo sia carica.
- Scuotere leggermente l'UAV: nulla dovrebbe allentarsi, vibrare o cadere a terra. Non saprai mai cosa potrebbe essere stato spostato o rotto a causa di un atterraggio duro su un volo precedente.
- Assicurarsi che le eliche siano ancora saldamente fissate.
- Prima accendi l'apparecchiatura di controllo, quindi accendi il drone (tenere le mani lontane dai rotori).
- Assicurati di poter armare e riarmare in modo affidabile i motori (dovrebbero girare a basso numero di giri quando "Arm" e smettere di girare quando "Disarm")
- Assicurati di calibrare o che i sensori siano buoni calibrato (dovete farlo regolarmente)
- Controllare la portata del trasmettitore.
- Assicurati che l'area di volo sia completamente sgombra e se qualcuno è all'interno, avvisalo, specialmente i bambini curiosi; che stai pilotando l'UAV e che non dovresti avvicinarti fino a quando il drone non è atterrato con i motori completamente spenti.

Test
Fino a quando non acquisirai sufficiente fiducia nelle tue capacità di pilota e progettista di droni, la seguente procedura è consigliato a tutti velivoli senza pilota prima del loro primo volo.
- Accendere i motori e assicurarsi che ruotino nelle direzioni corrette come descritto nel manuale del controller di volo.
- Alzare molto lentamente lo stick dell'acceleratore/joystick e assicurarsi che le eliche spingano l'aria verso il suolo. L'uso di carta velina è un'opzione sicura per l'ispezione visiva.
- Muovi lo stick del pitch/joystick molto attentamente avanti/indietro per assicurarti che il drone si inclini in avanti/indietro correttamente.
- Muovi con molta attenzione il Roll stick/joystick su ciascun lato per assicurarti che il drone risponda correttamente.
Se il drone non si comporta correttamente, ci sono molte possibili ragioni, tra le quali le più comuni sono:
- Uno o più motori stanno ruotando nella direzione sbagliata.
- Il controllore di volo non è stato installato correttamente e ciò che considera "avanti" è diverso dal tuo UAV fisico.
- Uno o più contatti tra il ricevitore e il controllore di volo non sono collegati correttamente o addirittura nel posto sbagliato.
- Forse tutto è impostato correttamente, semplicemente troppo rapidamente o troppo bruscamente per rispondere all'input dell'utente.
Piano di emergenza
appena iniziato a lavorare sul campo e/o con un nuovo drone. L'elenco che segue ha lo scopo di darti cose su cui pensare e alcune idee su come e perché rispondere agli aspiranti piloti. La decisione viene presa caso per caso e in alcune situazioni può contraddire quanto qui proposto. Quindi conosci te stesso, conosci ciò che ti circonda e fai attenzione! In quasi tutti i casi, sarà meglio perdere il drone che rischiare di scontrarsi con persone o cose.
Il drone è molto lontano e non sai in che direzione sia.
- Ridurre il motore e osservare se il drone risponde (verifica se c'è comunicazione).
- Se il drone risponde al gas, prova ad atterrare proprio lì (se puoi).
- Se questa posizione non è adatta per l'atterraggio, prova con attenzione a guidare il drone in avanti (niente di drastico), e se il drone reagisce facendo affidamento sulla tua posizione, spostandoti a sinistra o a destra nel cielo ti permetterà di determinare il suo orientamento. Se non sembra muoversi a sinistra o a destra, potrebbe muoversi verso di te o allontanarsi da te, quindi annulla ciò che hai appena fatto e prova a perlustrare a sinistra.
Il drone improvvisamente devia bruscamente fuori rotta (con o senza motivo).
- Se non si è abili nel pilotaggio (per cercare di ripristinarlo), rilasciare completamente il gas e lasciarlo cadere: in questo caso, contemplare un'azione radicale può portare alla perdita di vista del drone o, peggio ancora, il drone inizierà a salire per cadere da una distanza maggiore.
Il drone si sta muovendo rapidamente verso le persone.
- Gas al massimo in modo che guadagni quota e li sorvoli; il tuo drone sarà probabilmente ancora nell'orientamento generale corretto, quindi è meglio perdere il drone che volare contro le persone.
- Dopo aver raggiunto l'altitudine ottimale, cerca di riprendere il controllo, quindi posizionalo in modo che sia al di sopra dell'area di atterraggio libera.
Il drone si sta muovendo rapidamente verso di te.
- Gas a zero; lascia che colpisca il suolo che ti volerà in testa.
Il drone non risponde all'input dall'apparecchiatura di controllo.
- In tal caso, non c'è niente che tu possa fare. Se il tuo drone è ancora in volo, le batterie del telecomando potrebbero essere esaurite.
Il drone perde l'elica.
- La perdita di un'elica influisce sia sulla spinta che sull'imbardata; prova prima a raddrizzare l'imbardata (probabilmente devi tenere lo stick/joystick collegato all'imbardata, nella posizione estrema), e poi allo stesso tempo muovere con cautela lo stick dell'acceleratore/gas verso l'alto per evitare una collisione, quindi abbassare l'acceleratore.
Primo volo
Indipendentemente dalla tua precedente esperienza di volo, il tuo primo volo, specialmente con un UAV multimotore personalizzato, dovrebbe essere il più discreto possibile. Lo scopo del primo volo è assicurarsi che tutto sia impostato correttamente; oltre a identificare eventuali problemi gravi.
- Luogo: spazio aperto, lontano da edifici, persone e proprietà. Ad esempio: un campo da calcio vuoto, un campo da baseball e così via sarebbe l'ideale. Non dovrebbe esserci affatto vento.
- Esamina la lista di controllo prevolo del pilota.
- Posizionati a circa 2 metri di distanza dal drone con la parte anteriore del drone rivolta verso di te.
- Armare i motori.
- Spostare delicatamente lo stick del motore/joystick verso l'alto. Raggiungi il punto in cui il drone è pronto a decollare. Potrebbero esserci alcuni effetti suolo che fanno rimbalzare leggermente il drone, ma non preoccuparti.
- Aggiungi l'acceleratore per sollevare il drone da terra e abituarti ai comandi: prova a tenerlo entro un certo raggio e guarda come reagisce ai movimenti della levetta/joystick.
- Fai movimenti piccoli, graduali e fluidi, niente di troppo improvviso. Abbassare lo stick dell'acceleratore per evitare incidenti.
- Se il tuo drone non si comporta come previsto (ad esempio, lo spostamento dell'asse "Pitch" porta al suo beccheggio, così come il rollio a sinistra o a destra), qualcosa non va e dovrai scoprire il cause dei problemi individuati...
- Se il drone si comporta come previsto, il tuo compito è quello di mantenere stabilmente la sua posizione ad un'altezza di 1,2-2 metri da terra. Non arrabbiarti così in fretta.


.Voli aggiuntivi
Ora che hai risolto i problemi e voli comodamente in ambiente controllato si può procedere con il secondo volo.
- Poiché il drone non è ancora completamente testato, suggeriamo di eseguire l'intera procedura di pre-volo per il primo volo, che non dovrebbe richiedere molto tempo.
- Usando movimenti fluidi, abituati a come il drone reagisce ai movimenti del tuo bastone/bastone mantenendolo a una distanza di sicurezza.
- L'adattamento al pilotaggio di un drone dovrebbe essere effettuato senza l'ausilio di FPV e di vari sensori.







