Contenuti
- Drone fai da te: Lezione 1. Terminologia.
- Drone fai da te: Lezione 2. Cornici.
- Drone fai da te: lezione 3. Centrale elettrica.
- Drone fai-da-te: lezione 4. Controllore di volo.
- Drone fai da te: Lezione 5. Assemblaggio.
- Drone fai-da-te: Lezione 6. Controllo delle prestazioni.
- Drone fai da te: lezione 7. FPV e distanza.
- Drone con le tue mani: Lezione 8. Aerei.
Introduzione
Ora che hai selezionato o costruito un telaio, il passo successivo è selezionare il gruppo propulsore corretto. Poiché la maggior parte dei droni esistenti sono elettrici, ci concentreremo sulla generazione di propulsione puramente elettrica tramite motori CC senza spazzole. La centrale comprende motori, rotori (eliche, eliche abbreviate), ESC e una batteria di accumulo.
1. Motore
Da quali motori utilizzi nel tuo assemblaggio, dipenderà dal carico massimo che il drone può sollevare e da quanto tempo può essere in volo. La centrale deve necessariamente essere costituita da motori della stessa marca e modello, questo approccio gli fornirà un funzionamento equilibrato. Va notato che anche motori assolutamente identici (Marca / Modello) possono avere una leggera differenza di velocità, che viene successivamente livellata dal controller di volo.
Brushless vs Brushless
Nei motori Brushed, il rotore avvolto ruota all'interno dello statore su cui sono fissati rigidamente i magneti. Nei motori brushless tutto gira; l'avvolgimento è fissato rigidamente all'interno dello statore, i magneti sono montati sull'albero e ruotano. Nella maggior parte dei casi, prenderai in considerazione solo i motori CC senza spazzole (BC). I motori di questo tipo sono ampiamente utilizzati nell'industria radioamatoriale per assemblare prodotti che vanno da elicotteri e aeroplani a sistemi di azionamento in auto e barche.
I motori brushless Pancake hanno un diametro maggiore, sono più piatti e generalmente hanno una coppia elevata e un KV inferiore (dettagli di seguito). Gli UAV di piccole dimensioni (di solito palmari) utilizzano spesso piccoli motori a spazzole a causa del loro costo inferiore e del semplice controller a due fili. Sebbene i motori brushless siano disponibili in diverse dimensioni e specifiche, scegliere una dimensione più piccola non significa che sarà più economico.

Inrunner vs Outrunner
Esistono diversi tipi di motori CC senza spazzole:
- Inrunner è un rotore interno. L'avvolgimento è fissato allo statore, i magneti sono montati sull'albero del rotore, che ruota (solitamente utilizzato su barche RC, elicotteri e auto a causa dell'alto KV).
- Outrunner - rotore esterno. I magneti sono fissati ad uno statore che ruota attorno ad un avvolgimento stazionario. La parte inferiore del motore è fissa.(di norma, i motori di questo tipo hanno più coppia).
- Hybrid Outrunner - Questo è tecnicamente un "Outrunner", ma implementato in un pacchetto "Inrunner". Questo approccio ha permesso di combinare in un unico tipo la coppia "Outrunner" e l'assenza di elementi rotanti esterni come nei motori del tipo "Inrunner".
KV
Valore KV - max. il numero di giri che il motore può sviluppare senza perdita di potenza ad una data tensione. Per la maggior parte degli UAV multi-rotore, è rilevante un valore KV basso (ad esempio, da 500 a 1000), poiché ciò aiuta a garantire la stabilità. Mentre per il volo acrobatico sarà rilevante un valore di KV compreso tra 1000 e 1500, in tandem con rotori (eliche) di diametro inferiore. Diciamo che il valore KV per un particolare motore è 650 rpm, quindi a una tensione di 11,1 V il motore ruoterà a una velocità di: 11,1 × 650 = 7215 rpm e se si utilizza il motore a una tensione inferiore (diciamo 7,4 V), allora la velocità di rotazione sarà: 7,4 × 650 = 4810 giri/min. È importante notare, tuttavia, che l'utilizzo di una bassa tensione generalmente significa un maggiore consumo di corrente (Potenza = Corrente × Tensione).
Spinta
Alcuni produttori di motori brushless possono specificare nelle specifiche informazioni sulla spinta massima possibile (Spinta) generata dal motore in combinazione con il rotore principale consigliato. L'unità di misura della spinta è solitamente chilogrammo (Kg/Kg), libbra (Lbs) o Newton (N). Ad esempio, se stai costruendo un quadricottero e conosci il valore di spinta di un singolo motore = fino a 0,5 kg in un compartimento con un rotore da 11 pollici, all'uscita quattro di questi motori possono essere sollevati alla massima spinta: 0,5 kg × 4 = 2 kg. Di conseguenza, se il peso totale del tuo quadricottero è leggermente inferiore a 2 kg, con una tale centrale decollerà solo al massimo numero di giri (spinta massima). In questo caso, sarà rilevante o scegliere un pacchetto motore rotore più potente, che fornirà più spinta, o ridurre il peso totale del drone. Al massimo spinta della centrale = 2kg, il peso del drone non deve superare la metà di questo valore (1kg, compreso il peso dei motori stessi). Un calcolo simile può essere eseguito per qualsiasi configurazione. Supponiamo che il peso dell'esacottero (compresi telaio, motori, elettronica, accessori, ecc.) sia di 2,5 kg. Ciò significa che ogni motore per tale assemblaggio deve fornire (2,5 kg ÷ 6 motori) × 2 = 0,83 kg di spinta (o più). Ora sai come calcolare la spinta ottimale dei motori in base al peso totale, ma prima di prendere una decisione, ti suggeriamo di familiarizzare con le sezioni seguenti.
Considerazioni aggiuntive
- Connettori: I motori CC con spazzole hanno due connettori "" e "-". Cambiando i fili in posti cambia il senso di rotazione del motore.
- Connettori: I motori DC senza spazzole hanno tre connettori. Per scoprire come collegarli, nonché come modificare il senso di rotazione, fare riferimento alla sezione ESC di seguito.
- Avvolgimenti: Gli avvolgimenti influenzano il KV dei motori. Se hai bisogno del valore KV più basso ma dai la priorità alla coppia, è meglio rivolgere la tua attenzione ai motori CC senza spazzole di tipo Pancake.
- Montaggio: La maggior parte dei produttori dispone di uno schema elettrico generale per motori CC per motori CC, che consente ai produttori di telai di evitare di realizzare i cosiddetti adattatori. La dima è solitamente metrica, con due fori distanziati di 16 mm e altri due fori distanti 19 mm (90° rispetto al primo).
- Filettatura: La filettatura di montaggio utilizzata per fissare il motore brushless al telaio può variare. Le normali dimensioni metriche delle viti sono M1, M2 e M3, le dimensioni in pollici possono essere 2-56 e 4-40.
2. Rotori principali (Eliche)
I rotori principali (eliche, eliche abbreviate) per UAV multi-rotore provengono dalle eliche degli aerei radiocomandati. Molti si chiederanno: perché non usare le pale degli elicotteri? Anche se questo è già stato fatto, immagina le dimensioni di un esacottero con pale di elicottero. Vale anche la pena notare che il sistema dell'elicottero richiede un cambiamento nel passo delle pale, e questo complica notevolmente il design.
Potresti anche chiedere perché non usare un motore a turbogetto, un motore turbofan, un turboelica, ecc.? Sono certamente incredibilmente bravi a fornire molta spinta, ma richiedono anche molta energia. Se la preoccupazione principale del drone è quella di muoversi molto rapidamente piuttosto che librarsi in uno spazio ristretto, uno dei motori di cui sopra potrebbe essere una buona opzione.
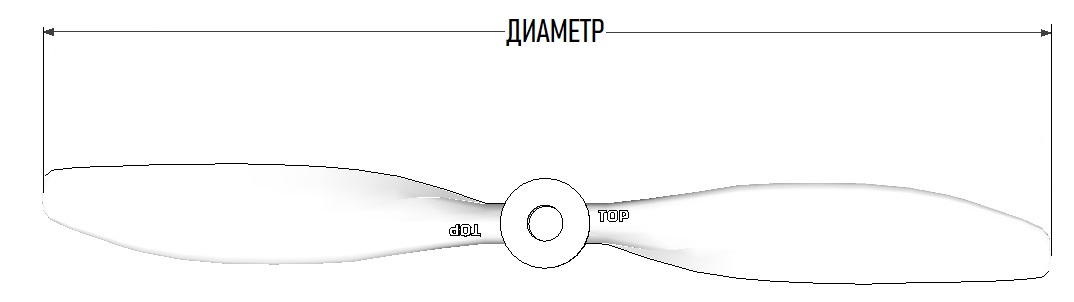
Pale e diametro
Il rotore principale della maggior parte degli UAV multi-rotore ha due o tre pale. Le eliche più utilizzate sono a due pale. Non dare per scontato che l'aggiunta di più pale aumenterà automaticamente la spinta; ogni pala lavora nel flusso disturbato dalla pala precedente, riducendo l'efficienza dell'elica. Il rotore principale di piccolo diametro ha meno inerzia e quindi è più facile accelerare e decelerare, cosa importante per il volo acrobatico.

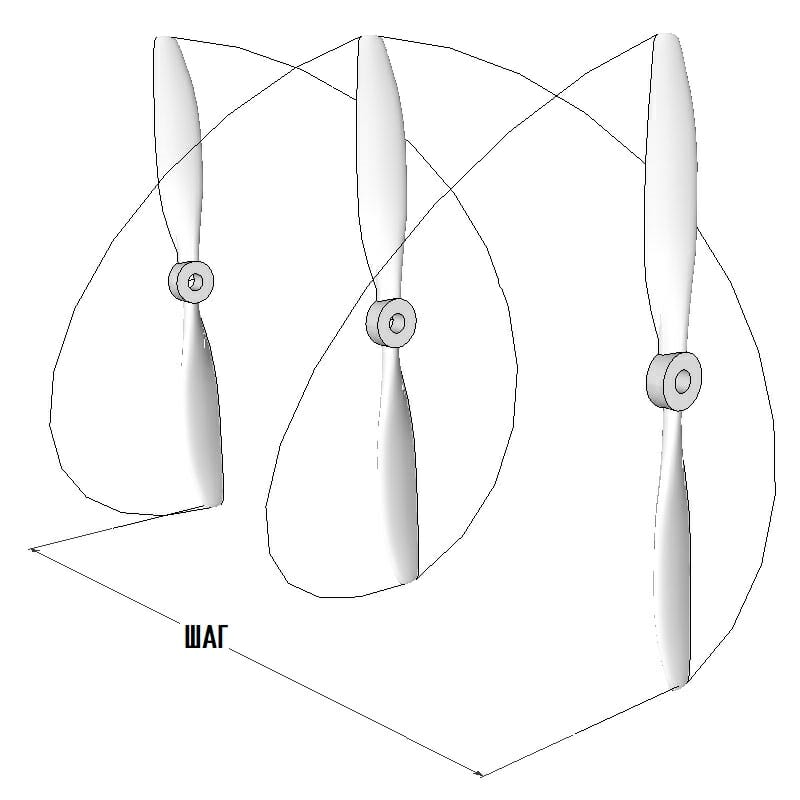
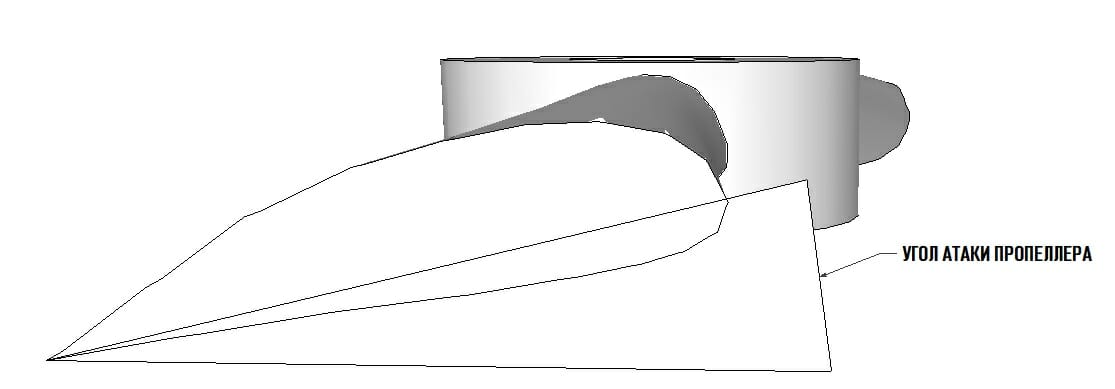
Pitch / Angolo di attacco / Efficienza / Spinta
La spinta generata dal rotore principale dipende dalla densità dell'aria, dal numero di giri dell'elica, dal suo diametro, dalla forma e dall'area delle pale, nonché dal suo passo. L'efficienza di un'elica è correlata all'angolo di attacco, che è definito come il passo della pala meno l'angolo dell'elica (l'angolo tra la velocità relativa risultante e la direzione di rotazione della pala). L'efficienza stessa è il rapporto tra potenza in uscita e potenza in ingresso. La maggior parte delle eliche ben progettate ha un'efficienza superiore all'80%. L'angolo di attacco è influenzato dalla velocità relativa, quindi l'elica avrà un'efficienza diversa a diverse velocità del motore. L'efficienza è anche fortemente influenzata dal bordo anteriore della pala del rotore principale ed è molto importante che sia il più liscio possibile. Mentre un design a passo variabile sarebbe il migliore, la complessità aggiuntiva richiesta rispetto alla semplicità intrinseca del multi-rotore significa che un'elica a passo variabile non viene quasi mai utilizzata.
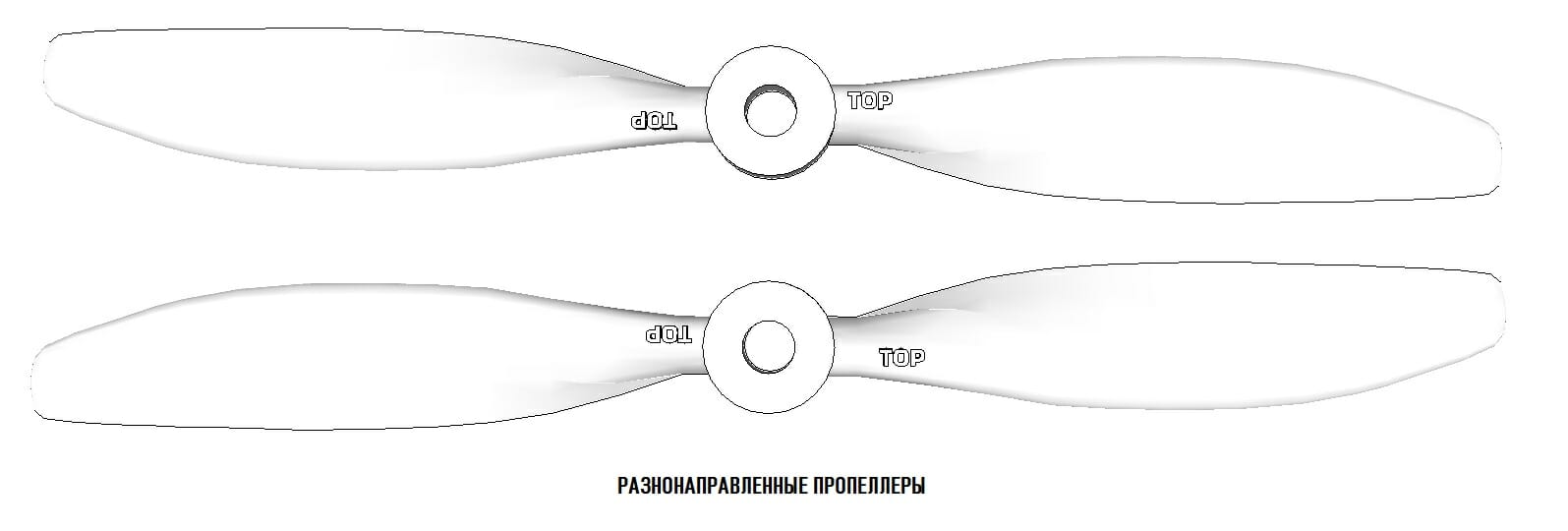
Rotazione
I rotori sono progettati per la rotazione in senso orario (CW), o antiorario (CCW). Il senso di rotazione è indicato dall'inclinazione della pala ( guardare l'elica dall'estremità di testaVtailY6X8
Materiali di esecuzione
I materiali utilizzati per la fabbricazione di rotori (eliche) possono avere un effetto moderato sul volo prestazioni ma la sicurezza dovrebbe essere una priorità assoluta, soprattutto se sei un principiante e inesperto.
- Plastica (ABS / Nylon, ecc.) è la scelta più popolare quando si tratta di UAV multimotore. Ciò è in gran parte dovuto al basso costo, alle caratteristiche di volo decenti e alla durata esponenziale. In genere, in caso di incidente, almeno un'elica è rotta e, mentre si padroneggia il drone e si impara a volare, si avranno sempre molti oggetti di scena rotti. La rigidità e la resistenza agli urti della vite in plastica possono essere migliorate rinforzando con fibra di carbonio (carbonio), questo approccio è max. efficace e non così costoso rispetto a un'elica a tutti gli effetti e in fibra di carbonio.
- Polimero fibrorinforzato (fibra di carbonio, nylon rinforzato con carbonio, ecc.) - è la tecnologia "avanzata" in molti rapporti. Le parti in fibra di carbonio non sono ancora molto facili da produrre e quindi le paghi di più rispetto a una normale vite in plastica con parametri simili. Un'elica in fibra di carbonio è più difficile da rompere o piegare e quindi, se si schianta, farà più danni a tutto ciò con cui entra in contatto. Allo stesso tempo, le eliche in carbonio sono generalmente ben realizzate, più rigide (con una perdita minima di efficienza), raramente necessitano di bilanciamento e sono più leggere di qualsiasi altro materiale. Si consiglia di prendere in considerazione tali eliche solo dopo che il livello di pilotaggio dell'utente diventa confortevole.
- Il legno è un materiale raramente utilizzato per la produzione di rotori UAV multirotore, poiché la loro fabbricazione richiede lavorazioni meccaniche, che in seguito rende le eliche in legno più costose di quelle in plastica. Allo stesso tempo, l'albero è abbastanza forte e non si piega mai. Si noti che le eliche di legno sono ancora utilizzate sugli aerei radiocomandati.



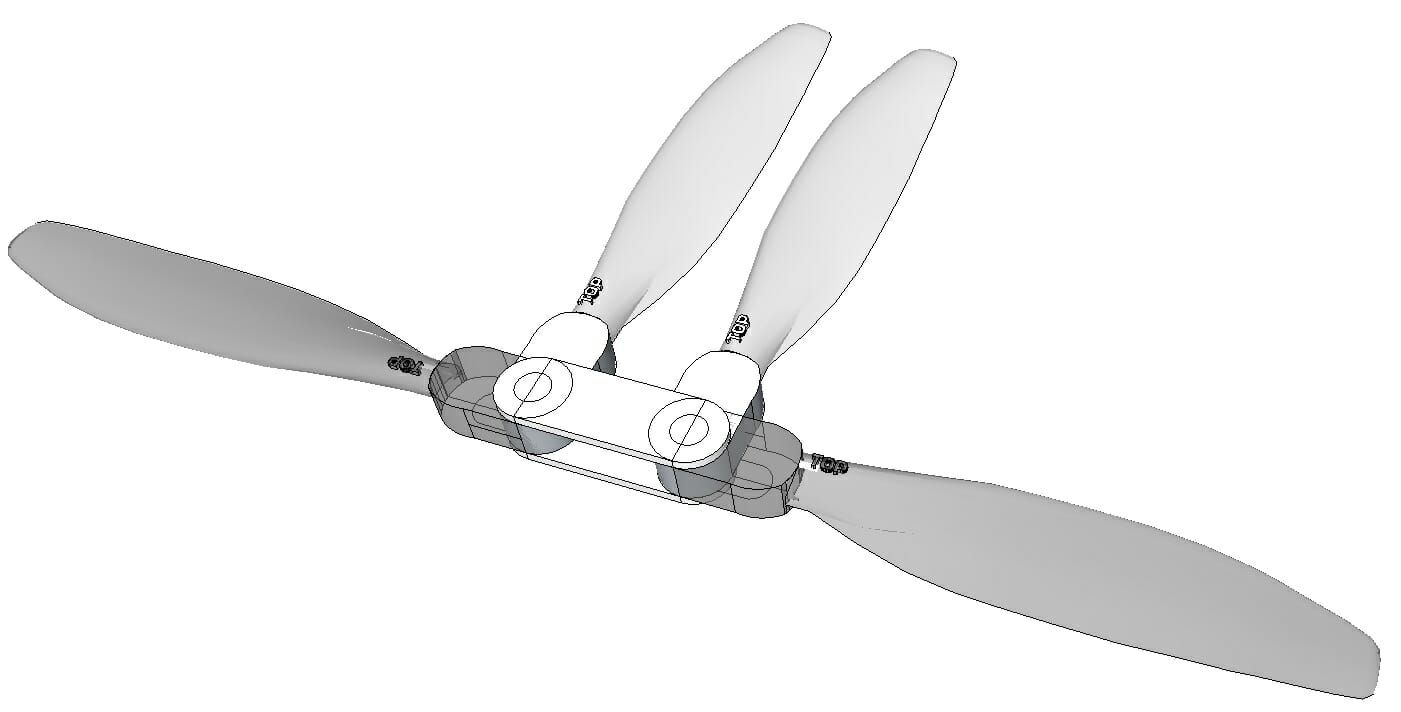
Pieghevoli
Le eliche pieghevoli hanno una parte centrale che si collega a due pale girevoli. Quando il centro (che è collegato all'albero di uscita del motore) ruota, le forze centrifughe agiscono sulle pale spingendole verso l'esterno e rendendo sostanzialmente "rigida" l'elica, con lo stesso effetto di una classica elica non pieghevole. A causa della bassa domanda e dell'elevato numero di parti richieste, le eliche pieghevoli sono meno comuni. Il vantaggio principale degli oggetti di scena pieghevoli è la compattezza e, in combinazione con un telaio pieghevole, le dimensioni di trasporto del drone possono essere significativamente inferiori alle dimensioni di volo. Un vantaggio concomitante del meccanismo di piegatura è l'assenza della necessità, in caso di urto, di cambiare completamente l'elica, sarà sufficiente sostituire solo la pala danneggiata.
Installazione
Come gli UAV, i rotori possono avere un'ampia gamma di dimensioni. Pertanto, nel settore esistono numerosi diametri dell'albero motore "standard". A questo proposito, il rotore principale è spesso fornito con un piccolo set di anelli adattatori (sembrano rondelle con fori di diverso diametro al centro), che sono installati nel il foro centrale dell'elica
La vite può essere fissata al motore in base al metodo di montaggio supportato dal motore. Se l'albero motore non implica alcuna opzione di fissaggio (connessione filettata, vari dispositivi di fissaggio, ecc.), Vengono utilizzati adattatori speciali, come propsaver e morsetti a pinza.
- Propsaver
- Mandrino portapinze
I motori brushless con rotore esterno (tipo "Outrunner"), di norma, nella parte superiore di esso, hanno diversi fori filettatiè un'opzione altrettanto popolare per il fissaggio dell'elica all'albero del motore BC. L'albero di un tale motore ha una filettatura all'estremità, la cui direzione è opposta alla direzione di rotazione del rotore. Questo approccio elimina l'allentamento spontaneo del dado di fissaggio, garantendo un funzionamento sicuro e affidabile del drone.
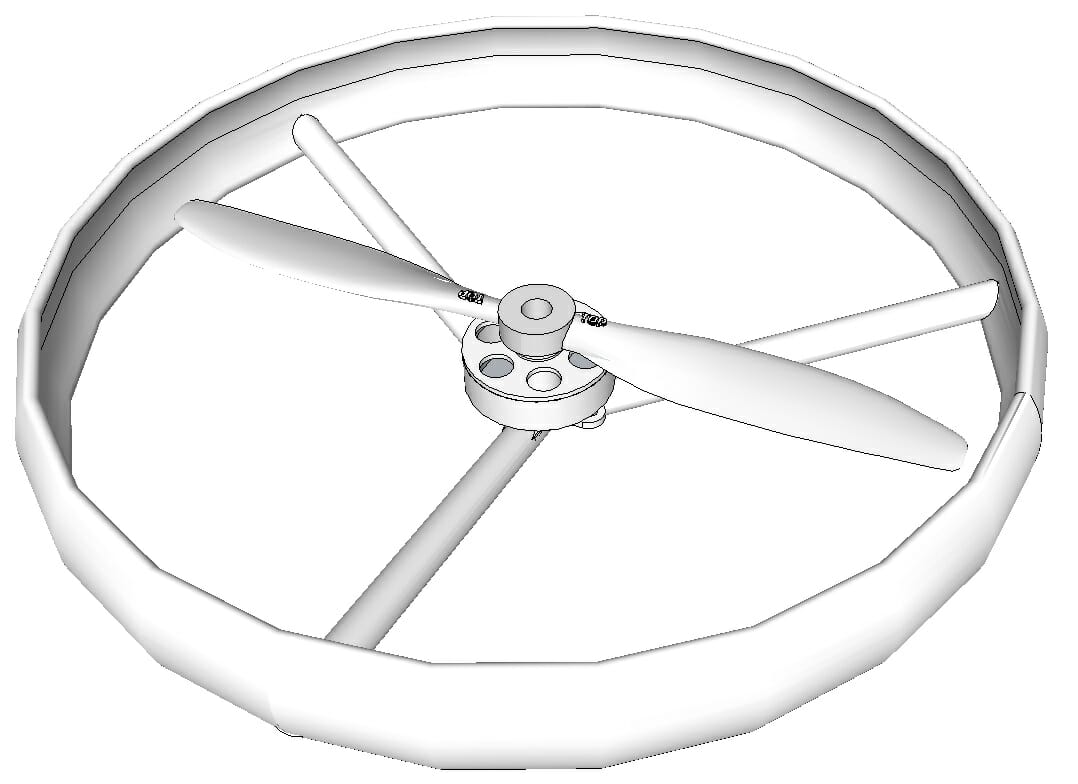
Protezione dei rotori
Protezione dei rotori - progettata per escludere il contatto diretto della centrale elettrica UAV con un oggetto in avvicinamento, preservandone l'integrità e le prestazioni, nonché per prevenire lesioni o eliche in rapida rotazione a seguito di collisioni con persone e animali. Le protezioni dell'elica sono fissate al telaio principale. A seconda della versione, può sovrapporsi parzialmente all'area di lavoro della centrale elettrica o completamente (protezione ad anello). La protezione dell'elica viene spesso utilizzata su piccoli UAV (giocattolo). L'uso di elementi protettivi nell'assieme comporta anche una serie di compromessi, tra cui:
- Può causare vibrazioni eccessive.
- Generalmente resiste a colpi leggeri.
- Può ridurre la spinta se vengono posizionati troppi piedini di montaggio sotto l'elica.
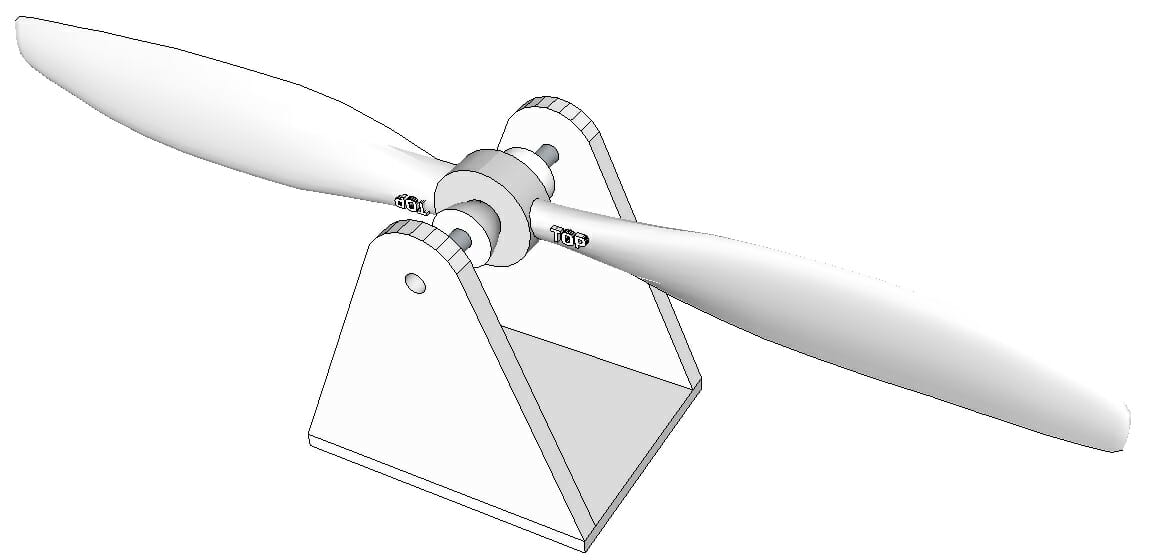
Bilanciamento
Uno scarso bilanciamento si verifica sulla maggior parte delle eliche economiche. Per essere sicuri di ciò, non devi andare lontano, basta inserire una matita nel foro centrale della vite (di norma, con uno squilibrio, un lato sarà più pesante dell'altro). Pertanto, si consiglia vivamente di bilanciare le eliche prima di installarle sui motori. Un'elica sbilanciata provocherà vibrazioni eccessive, che a loro volta influiranno negativamente sulle prestazioni del controllore di volo (manifestato in un comportamento scorretto del drone in volo), per non parlare di un aumento del rumore, una maggiore usura degli elementi della centrale elettrica e un deterioramento della qualità della telecamera sospesa.
L'elica può essere bilanciata in diversi modi, ma se stai costruendo un drone da zero, allora nell'arsenale di strumenti deve essere un economico bilanciatore dell'elica che consente di determinare facilmente e semplicemente lo squilibrio di peso nell'elica. Per equalizzare il peso, puoi molare la parte più pesante dell'elica (macinare uniformemente la parte centrale della pala e in nessun caso tagliare la parte dell'elica), puoi anche bilanciare attaccando un pezzo di nastro adesivo (sottile) su la lama più leggera (aggiungere i segmenti in modo uniforme fino a raggiungere l'equilibrio). Si noti che più lontano dal centro si effettua un aggiornamento di bilanciamento (levigando o aggiungendo una cinghia) dell'elica, maggiore sarà l'effetto basato sul principio della coppia.
3. ESC
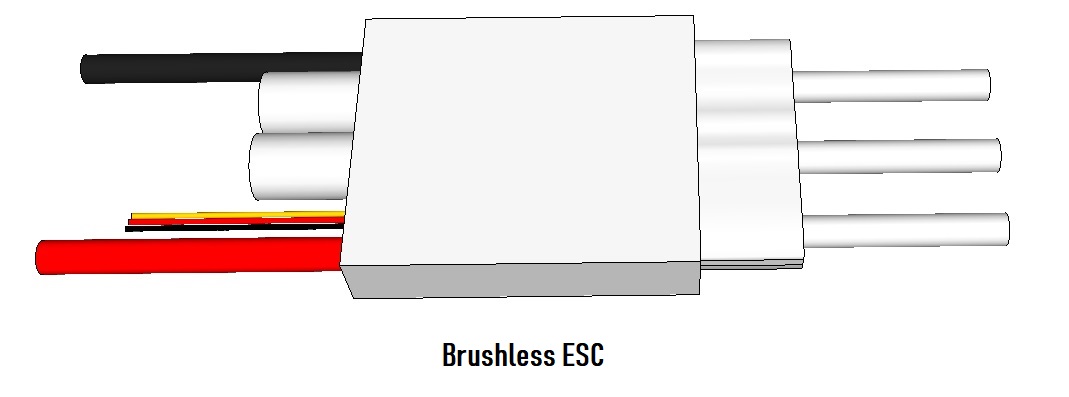
ESC (regolatore elettronico di velocità inglese; rus.regolatore di velocità elettronico) - consente al controller di volo di controllare la velocità e la direzione del motore. Con la corretta tensione, l'ESC deve essere in grado di sopportare max. la corrente che il motore può consumare e limitare anche la corrente che attraversa la fase durante la commutazione. La maggior parte degli ESC per droni per hobby consente al motore di ruotare solo in una direzione, tuttavia con il firmware corretto possono funzionare in entrambe le direzioni.
Connessione
Inizialmente, l'ESC può creare confusione perché ci sono diversi fili / pin / connettori disponibili per collegarlo. lati (ESC può venire con o senza connettori saldati).
- Alimentazione: Vengono forniti due cavi spessi (solitamente nero e rosso) per fornire alimentazione dalla scheda/cablaggio di distribuzione a cui l'alimentazione proviene direttamente dalla batteria principale dell'aeromobile.
- 3 connettori: Sul lato opposto del controller sono disponibili tre connettori per il collegamento a tre connettori bullet (solitamente forniti con i motori) su un motore brushless. L'uso di connettori durante il collegamento dell'ESC consente, se necessario (in caso di guasto), di cambiare rapidamente il controller senza utilizzare un saldatore. Succede che i connettori a forma di proiettile forniti con il motore non combacino con i connettori sul regolatore, nel qual caso è sufficiente sostituirli con quelli adatti. Quale dei tre è "più" e quale è "meno"? Il punto di riferimento è un semplice filo positivo proveniente dalla batteria, che va in positivo su ESC, allo stesso modo con un meno.
- Connettore servo R/C a 3 pin con fili sottili: attraverso il quale viene elaborato il segnale proveniente dal ricevitore, di cui un filo è segnale (trasmissione del segnale del gas all'ESC o ingresso), il secondo "Meno" (o massa) e un filo positivo (non utilizzato se non è presente un BEC integrato; con BEC integrato, è un'uscita di alimentazione a 5V, che può essere successivamente utilizzata per alimentare elettronica di bordo).
BEC
Agli albori della modellistica aeronautica, come centrale elettrica veniva utilizzato un motore a combustione interna e l'elettronica di bordo era alimentata da un piccolo batteria. Con l'avvento della trazione elettrica e dei controller (ESC), in quest'ultimo, hanno iniziato a includere il cosiddetto circuito di eliminazione della batteria - BEC (in inglese. Battery Eliminator Circuit; o convertitore di potenza di bordo; di norma, fornisce una sorgente di corrente aggiuntiva con una tensione di 5 V a una corrente di 1 A o superiore). In altre parole, è un convertitore di tensione utilizzato nell'assemblaggio LiPo in una tensione per alimentare l'elettronica di bordo del drone.
Quando si assembla il multirotore, tutti gli ESC devono essere collegati al controller di volo, ma è richiesto un solo BEC, altrimenti potrebbero sorgere problemi quando si alimentano le stesse linee. Poiché di solito non è possibile disabilitare il BEC su un ESC, è meglio rimuovere il filo rosso () e avvolgerlo con nastro isolante per tutti gli ESC tranne uno. È anche importante lasciare il filo nero (massa) per la messa a terra comune.
Firmware
Non tutti gli ESC sul mercato sono ugualmente validi per applicazioni multi-rotore. È importante capire che prima dell'avvento degli UAV multimotore, i motori brushless venivano utilizzati principalmente come centrale elettrica per auto, aeroplani ed elicotteri radiocomandati. La maggior parte non richiede tempi di risposta rapidi o aggiornamenti. Gli ESC con software integrato SimonK o BLHeli sono in grado di reagire molto rapidamente ai cambiamenti in arrivo, il che generalmente fa la differenza tra volo stabile o crash.
Distribuzione dell'alimentazione
Poiché ogni ESC è alimentato dalla batteria principale, il connettore della batteria principale deve essere in qualche modo diviso in quattro ESC. Questo viene fatto usando la Scheda di distribuzione dell'alimentazioneCablaggio di distribuzione dell'alimentazioneDeans
4. Batteria
Chimica
Le batterie utilizzate nei veicoli aerei senza equipaggio sono attualmente esclusivamente polimeri di litio (LiPo) e la composizione di alcune di esse è piuttosto esotica: litio manganese o altro litio varianti. Il piombo acido semplicemente non è adatto e NiMh / NiCd sono ancora troppo pesanti per la loro capacità e spesso non sono in grado di fornire le elevate velocità di scarico richieste. LiPo offre alte prestazioni e velocità di scarica con un peso ridotto. Gli svantaggi sono il loro costo relativamente elevato e i problemi di sicurezza costanti (pericolo di incendio).
Voltaggio
In pratica, hai solo bisogno di una batteria per il tuo UAV. La tensione di questa batteria deve corrispondere ai motori BK selezionati. Quasi tutte le batterie utilizzate oggi sono a base di litio e contengono diverse celle (lattine) da 3,7 V ciascuna, dove 3,7 V = 1 S (cioè una batteria a una lattina; 2S sono due lattine, ecc.). Pertanto, è probabile che una batteria etichettata 4S abbia un valore nominale di 4 × 3,7 V = 14,8 V. Inoltre, il numero di lattine ti aiuterà a determinare quale caricabatterie utilizzare. Tieni presente che una batteria a cella singola ad alta capacità può sembrare fisicamente una batteria multicella a bassa capacità.
Capacità
La capacità della batteria è misurata in ampere-ora (Ah). Le batterie piccole possono avere una capacità di 0,1 Ah (100 mAh), la capacità della batteria per i droni di medie dimensioni può variare da 2-3 Ah (2000 mAh - 3000 mAh). Maggiore è la capacità, maggiore è il tempo di volo e, di conseguenza, più pesante è la batteria. Il tempo di volo di un UAV convenzionale può essere compreso tra 10 e 20 minuti, il che può sembrare di breve durata, ma dovresti capire che il drone lotta costantemente con la gravità durante il volo e, a differenza di un aereo, non ha superfici (ali) che forniscono assistenza nella forma della forza di sollevamento ottimale.
Velocità di scarica
La velocità di scarica della batteria al litio è misurata in "C" dove 1C è la capacità della batteria (di solito in ampere ore a meno che non si stia considerando un drone delle dimensioni di Palma). La velocità di scarica della maggior parte delle batterie LiPo è di almeno 5C (cinque volte la capacità), ma poiché la maggior parte dei motori utilizzati negli UAV multi-rotore consuma molta corrente, la batteria deve essere in grado di scaricarsi a una corrente incredibilmente elevata, che di solito è circa 30A o più.
Sicurezza
Le batterie LiPo non sono del tutto sicure in quanto contengono gas idrogeno pressurizzato e hanno la tendenza a bruciare e/o esplodere quando qualcosa c'è qualcosa che non va. Quindi, se hai dei dubbi sullo stato di salute della batteria, in nessun caso, non collegarla al drone e nemmeno al caricabatterie: considerala "dismessa" e smaltiscila correttamente. I segni rivelatori che qualcosa non va nella batteria sono ammaccature o rigonfiamenti (cioè perdite di gas). Quando si carica una batteria LiPo, è meglio usare una cassetta di sicurezza LiPo (scatola di sicurezza della batteria). Anche la conservazione della batteria

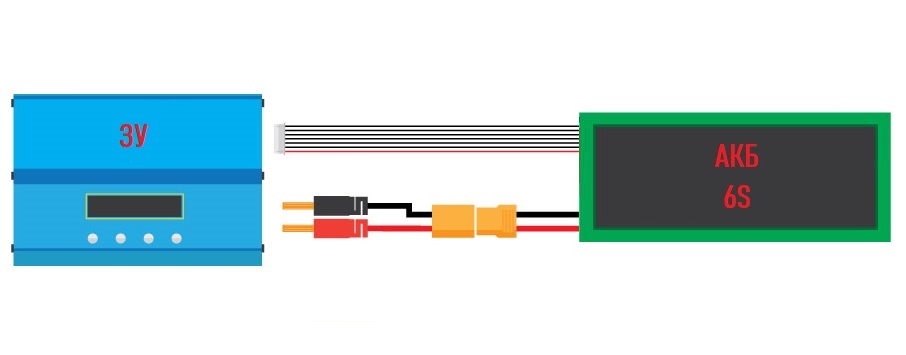
Ricarica
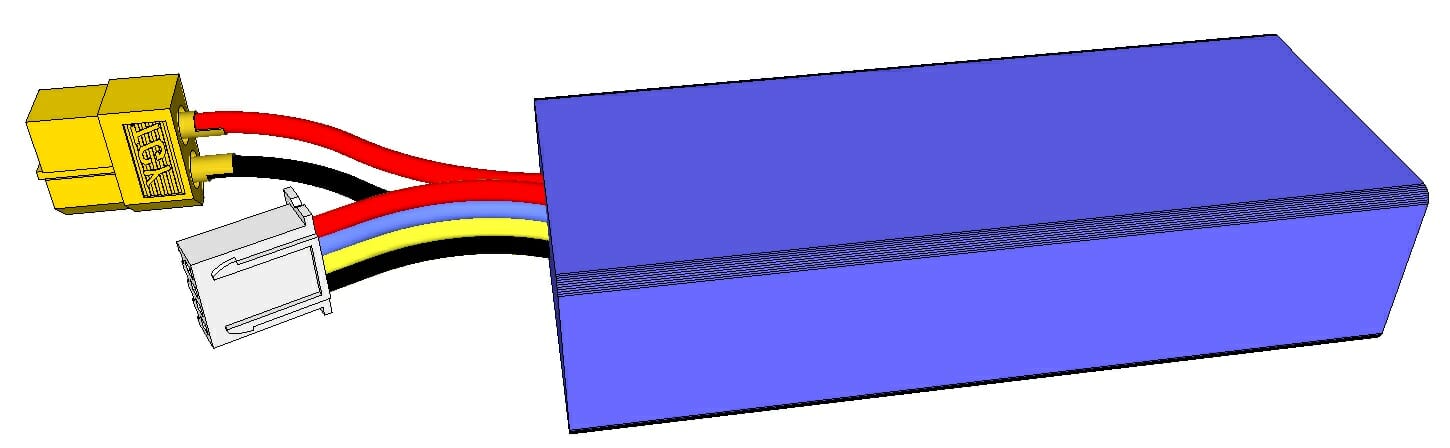
La maggior parte delle batterie LiPo ha due connettoriIl caricabatteriedei problemi di sicurezza associati alle batterie ai polimeri di litio
.Montaggio
La batteria è l'elemento più pesante del drone, quindi dovrebbe essere installata al centro del punto morto per garantire lo stesso carico sui motori. La batteria non prevede alcun montaggio speciale (soprattutto viti autofilettanti che possono danneggiare la LiPo e causare un incendio), quindi alcuni metodi di montaggio utilizzati oggi includono cinghie in velcro, gomma, scomparti in plastica e altri. L'opzione di montaggio della batteria più comune è quella di appendere la batteria sotto il telaio utilizzando un cinturino in velcro.







