Inhalt
- DIY-Drohne: Lektion 1. Terminologie.
- Do-it-yourself-Drohne: Lektion 2. Frames.
- Do-it-yourself-Drohne: Lektion 3. Kraftwerk.
- Do-it-yourself-Drohne: Lektion 4. Flugsteuerung.
- Do-it-yourself-Drohne: Lektion 5. Montage.
- Do-it-yourself-Drohne: Lektion 6. Leistungsüberprüfung.
- Do-it-yourself-Drohne: Lektion 7. FPV und Entfernung.
- Drohne mit eigenen Händen: Lektion 8. Flugzeuge.
Einführung
Nachdem Sie nun einen Rahmen ausgewählt oder gebaut haben, ist der nächste Schritt die Auswahl des richtigen Antriebssystems. Da die meisten existierenden Drohnen elektrisch sind, werden wir uns auf die Erzeugung eines rein elektrischen Antriebs durch bürstenlose Gleichstrommotoren konzentrieren. Das Kraftwerk umfasst Motoren, Rotoren (Propeller, abgekürzte Props), ESC und einen Akku.
1. Motor
Welche Motoren Sie in Ihrer Baugruppe verwenden, bestimmt, welche maximale Last die Drohne heben kann und wie lange sie im Flug sein kann. Das Kraftwerk muss unbedingt aus Motoren der gleichen Marke und des gleichen Modells bestehen, dieser Ansatz sorgt für einen ausgewogenen Betrieb. Dabei ist zu beachten, dass auch absolut identische (Marke/Modell) Motoren einen leichten Drehzahlunterschied aufweisen können, der nachträglich vom Flugregler nivelliert wird.
Bürsten vs. Bürstenlos
Bei Bürstenmotoren dreht sich der gewickelte Rotor im Stator, an dem die Magnete starr befestigt sind. Bei bürstenlosen Motoren ist alles eine Revolution; Die Wicklung ist fest mit der Innenseite des Stators verbunden und die Magnete sind auf der Welle montiert und rotieren. In den meisten Fällen kommen nur bürstenlose DC-Motoren (BC) in Betracht. Motoren dieser Art werden in der Amateurfunkindustrie häufig verwendet, um Produkte zu montieren, die von Hubschraubern und Flugzeugen bis hin zu Antriebssystemen in Autos und Booten reichen.
Bürstenlose Pancake-Motoren haben einen größeren Durchmesser, sind flacher und haben im Allgemeinen ein hohes Drehmoment und eine niedrigere KV (Details unten). Kleine UAVs (normalerweise handtellergroß) verwenden aufgrund ihrer geringeren Kosten und einfachen Zweidrahtsteuerung häufig kleine Bürstenmotoren. Obwohl bürstenlose Motoren in verschiedenen Größen und Spezifikationen erhältlich sind, bedeutet die Wahl einer kleineren Größe nicht, dass sie billiger sind.

Innenläufer vs. Außenläufer
Es gibt verschiedene Arten von bürstenlosen Gleichstrommotoren:
- Innenläufer ist ein Innenläufer. Die Wicklung ist am Stator befestigt, die Magnete sind auf der Rotorwelle montiert, die sich dreht (aufgrund der hohen KV normalerweise bei RC-Booten, Helikoptern und Autos verwendet).
- Außenläufer - Außenrotor. Die Magnete sind an einem Stator befestigt, der sich um eine stationäre Wicklung dreht. Die Unterseite des Motors ist fest.(in der Regel haben Motoren dieses Typs mehr Drehmoment).
- Hybrid Outrunner - Dies ist technisch gesehen ein "Outrunner", aber in einem "Inrunner"-Paket implementiert. Dieser Ansatz ermöglichte es, das Drehmoment "Außenläufer" und das Fehlen externer rotierender Elemente wie bei Motoren des Typs "Innenläufer" in einem Typ zu kombinieren.
KV
KV-Leistung - max. die Anzahl der Umdrehungen, die der Motor bei einer gegebenen Spannung ohne Leistungsverlust entwickeln kann. Für die meisten UAVs mit mehreren Rotoren ist ein niedriger KV-Wert (z. B. von 500 bis 1000) relevant, da dies zur Stabilität beiträgt. Während für den Akrobatikflug ein KV-Wert zwischen 1000 und 1500 relevant sein wird, in Verbindung mit Rotoren mit kleinerem Durchmesser (Propeller). Nehmen wir an, der KV-Wert für einen bestimmten Motor beträgt 650 U/min, dann dreht sich der Motor bei einer Spannung von 11,1 V mit einer Geschwindigkeit von: 11,1 × 650 = 7215 U / min, und wenn Sie den Motor mit einer niedrigeren Spannung verwenden (z. B. 7,4 V), dann beträgt die Drehzahl: 7,4 × 650 = 4810 U/min. Es ist jedoch wichtig zu beachten, dass die Verwendung von Niederspannung in der Regel einen höheren Stromverbrauch bedeutet (Leistung = Strom × Spannung).
Schub
Einige Hersteller von bürstenlosen Motoren können in der Spezifikation Angaben zum maximal möglichen Schub (Schub) machen, der vom Motor in Verbindung mit dem empfohlenen Hauptrotor erzeugt wird. Die Maßeinheit für Schub ist normalerweise Kilogramm (Kg / Kg), Pfund (Lbs) oder Newton (N). Wenn Sie beispielsweise einen Quadrocopter bauen und den Schubwert eines einzelnen Motors kennen = bis zu 0,5 kg in einem Fach mit einem 11-Zoll-Rotor, dann können am Ausgang vier solcher Motoren mit maximalem Schub angehoben werden: 0,5 kg × 4 = 2kg. Wenn das Gesamtgewicht Ihres Quadcopters dementsprechend etwas weniger als 2 kg beträgt, wird er mit einem solchen Triebwerk nur mit maximaler Drehzahl (maximaler Schub) abheben. In diesem Fall ist es relevant, entweder ein stärkeres Rotormotorpaket zu wählen, das mehr Schub liefert, oder das Gesamtgewicht der Drohne zu reduzieren. Bei max. Schubkraft des Kraftwerks = 2 kg, das Gewicht der Drohne sollte nicht mehr als die Hälfte dieses Wertes betragen (1 kg, einschließlich des Gewichts der Motoren selbst). Eine ähnliche Berechnung kann für jede Konfiguration durchgeführt werden. Angenommen, das Gewicht des Hexacopters (einschließlich Rahmen, Motoren, Elektronik, Zubehör usw.) beträgt 2,5 kg. Dies bedeutet, dass jedes Triebwerk für eine solche Baugruppe (2,5 kg ÷ 6 Triebwerke) × 2 = 0,83 kg Schub (oder mehr) bereitstellen muss. Jetzt wissen Sie, wie Sie den optimalen Schub der Motoren anhand des Gesamtgewichts berechnen können, aber bevor Sie eine Entscheidung treffen, empfehlen wir Ihnen, sich mit den folgenden Abschnitten vertraut zu machen.
Zusätzliche Überlegungen
- Anschlüsse: DC-Bürstenmotoren haben zwei Anschlüsse "" und "-". Durch stellenweises Wechseln der Drähte ändert sich die Drehrichtung des Motors.
- Anschlüsse: Bürstenlose Gleichstrommotoren haben drei Anschlüsse. Informationen zum Anschließen und zum Ändern der Drehrichtung finden Sie im Abschnitt ESC unten.
- Wicklungen: Die Wicklungen beeinflussen die KV der Motoren. Wenn Sie den niedrigsten KV-Wert benötigen, aber dem Drehmoment Priorität einräumen, wenden Sie sich am besten den bürstenlosen DC-Motoren vom Typ Pancake zu.
- Montage: Die meisten Hersteller haben einen allgemeinen Schaltplan für DC-Motoren für DC-Motoren, wodurch Rahmenfirmen auf die Herstellung sogenannter Adapter verzichten können. Die Schablone ist normalerweise metrisch, mit zwei Löchern im Abstand von 16 mm und zwei weiteren Löchern im Abstand von 19 mm (90 ° zum ersten).
- Gewinde: Das Befestigungsgewinde zur Befestigung des bürstenlosen Motors am Rahmen kann variieren. Die üblichen metrischen Größen von Schrauben sind M1, M2 und M3, zöllige Größen können 2-56 und 4-40 sein.
2. Hauptrotoren (Propeller)
Hauptrotoren (Propeller, abgekürzt Props) für Mehrrotor-UAVs stammen aus den Propellern von funkgesteuerten Luftfahrzeugen. Viele werden sich fragen: Warum nicht Hubschrauberblätter verwenden? Auch wenn dies bereits geschehen ist, stellen Sie sich die Abmessungen eines Hexacopters mit Hubschrauberblättern vor. Es ist auch erwähnenswert, dass das Helikoptersystem eine Änderung der Blattsteigung erfordert, was die Konstruktion erheblich verkompliziert.
Sie können sich auch fragen, warum nicht ein Turbojet-Triebwerk, ein Turbofan-Triebwerk, ein Turboprop-Triebwerk usw. verwendet werden. Sicherlich sind sie unglaublich gut darin, viel Schub zu geben, aber sie benötigen auch viel Energie. Wenn das Hauptanliegen der Drohne darin besteht, sich sehr schnell zu bewegen, anstatt auf engstem Raum zu schweben, könnte einer der oben genannten Motoren eine gute Option sein.
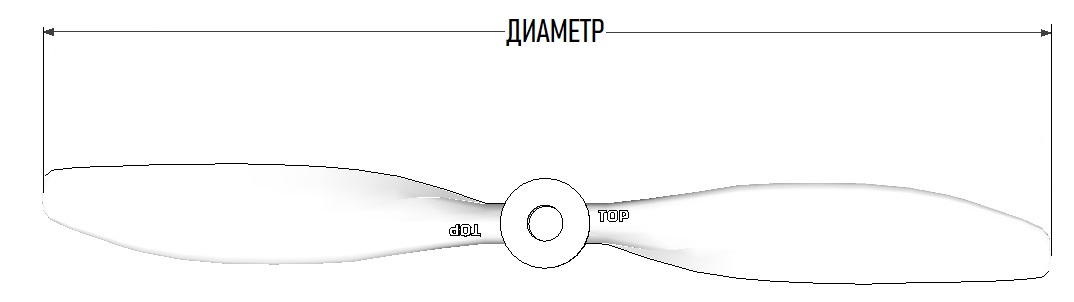
Blätter und Durchmesser
Der Hauptrotor der meisten UAVs mit mehreren Rotoren hat zwei oder drei Blätter. Die am häufigsten verwendeten Propeller sind mit zwei Blättern. Gehen Sie nicht davon aus, dass das Hinzufügen weiterer Klingen automatisch den Schub erhöht; Jedes Blatt arbeitet in der Strömung, die durch das vorherige Blatt gestört wird, wodurch die Effizienz des Propellers verringert wird. Der Hauptrotor mit kleinem Durchmesser hat eine geringere Trägheit und lässt sich daher leichter beschleunigen und abbremsen, was für den akrobatischen Flug wichtig ist.

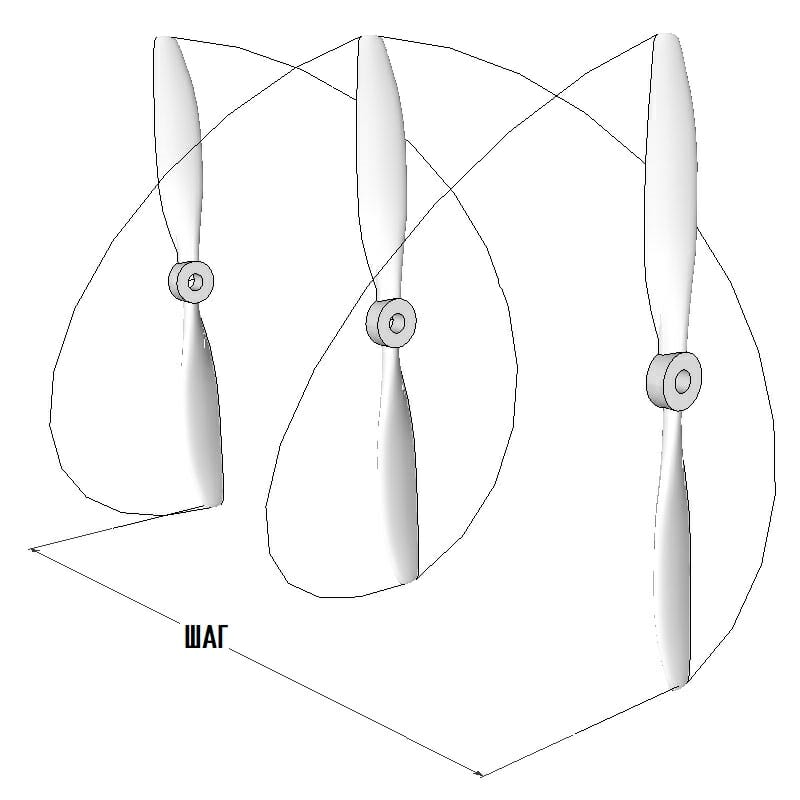
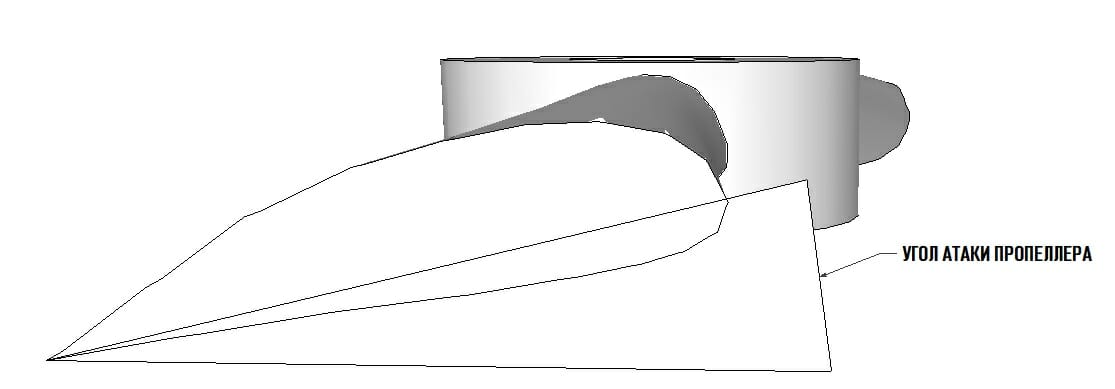
Steigung / Angriffswinkel / Effizienz / Schub
Der von der Hauptrotor hängt von der Luftdichte, der Drehzahl des Propellers, seinem Durchmesser, der Form und Fläche der Blätter sowie seiner Steigung ab. Der Wirkungsgrad eines Propellers hängt mit dem Anstellwinkel zusammen, der definiert ist als die Steigung des Flügels abzüglich des Schrägungswinkels (der Winkel zwischen der resultierenden Relativgeschwindigkeit und der Drehrichtung des Flügels). Der Wirkungsgrad selbst ist das Verhältnis von Ausgangsleistung zu Eingangsleistung. Die meisten gut konstruierten Propeller haben einen Wirkungsgrad von über 80 %. Der Anstellwinkel wird von der Relativgeschwindigkeit beeinflusst, sodass der Propeller bei unterschiedlichen Motordrehzahlen einen unterschiedlichen Wirkungsgrad hat. Die Effizienz wird auch stark von der Vorderkante des Hauptrotorblatts beeinflusst, und es ist sehr wichtig, dass es so glatt wie möglich ist. Obwohl ein Design mit variabler Steigung am besten wäre, bedeutet die zusätzliche Komplexität, die gegenüber der inhärenten Einfachheit von Mehrrotoren erforderlich ist, dass ein Propeller mit variabler Steigung fast nie verwendet wird.
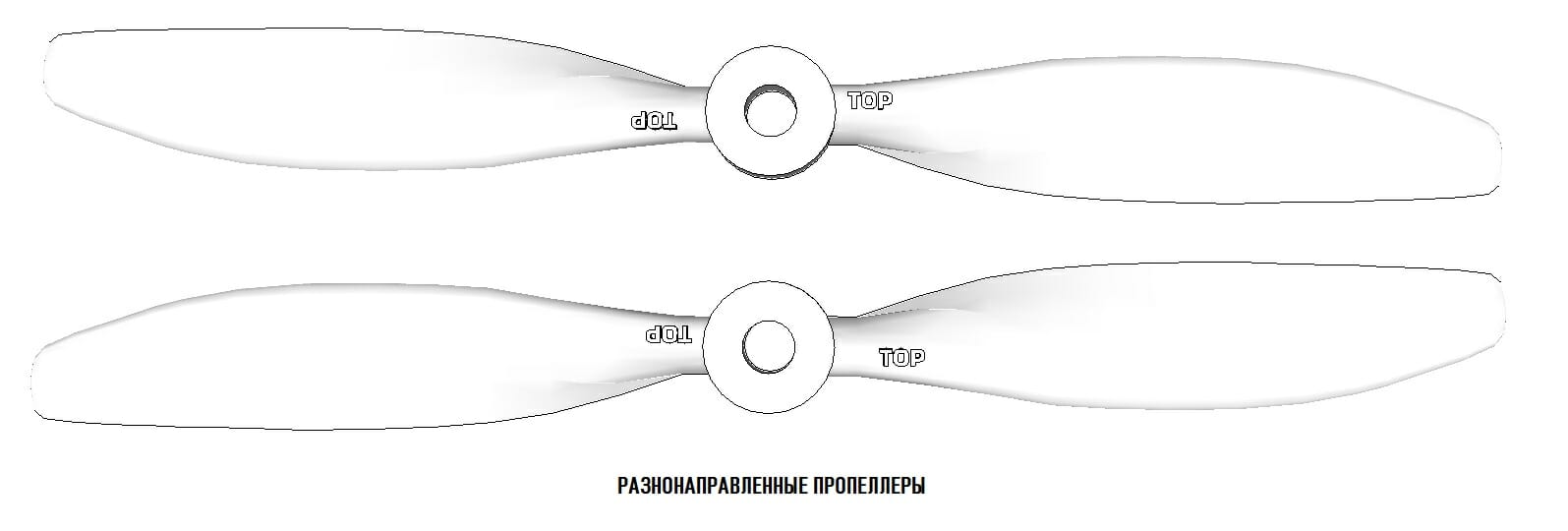
Rotation
Die Rotoren sind für Rechtslauf (CW) oder Linkslauf ausgelegt (CCW). Die Drehrichtung wird durch die Neigung des Flügels angezeigt ( Blick vom Kolbenende auf den PropellerVtailY6X8
Werkstoffe der Ausführung
Werkstoffe, die zur Herstellung von Rotoren (Propellern) verwendet werden, können den Flug mäßig beeinflussen Leistung, aber Sicherheit sollte oberste Priorität haben, besonders wenn Sie ein Anfänger und unerfahren sind.
- Kunststoff (ABS / Nylon usw.) ist die beliebteste Wahl, wenn es um mehrmotorige UAVs geht. Dies ist vor allem auf die geringen Kosten, die guten Flugeigenschaften und die exponentielle Haltbarkeit zurückzuführen. Normalerweise ist bei einem Absturz mindestens ein Propeller kaputt, und während Sie die Drohne beherrschen und das Fliegen lernen, werden Sie immer viele kaputte Propeller haben. Die Steifigkeit und Schlagzähigkeit der Kunststoffschraube kann durch Verstärkung mit Kohlefaser (Carbon) verbessert werden, dieser Ansatz beträgt max. effektiv und nicht so teuer im Vergleich zu einem vollwertigen und Kohlefaser-Propeller.
- Faserverstärktes Polymer (Kohlefaser, kohlenstoffverstärktes Nylon usw.) - ist die "fortgeschrittene" Technologie in vielen Beziehungen. Kohlefaserteile sind nach wie vor nicht ganz einfach herzustellen und zahlen daher mehr dafür als für eine normale Kunststoffschraube mit ähnlichen Parametern. Ein Propeller aus Kohlefaser ist schwerer zu brechen oder zu verbiegen, und wenn er abstürzt, wird er mehr Schaden an allem anrichten, mit dem er in Kontakt kommt. Gleichzeitig sind Carbonpropeller im Allgemeinen gut verarbeitet, steifer (mit minimalem Effizienzverlust), müssen selten ausgewuchtet werden und sind leichter als jedes andere Material. Es wird empfohlen, solche Propeller erst in Betracht zu ziehen, wenn der Benutzer mit dem Steuern vertraut ist.
- Holz ist ein selten verwendetes Material für die Herstellung von Mehrrotor-UAV-Rotoren, da ihre Herstellung eine mechanische Bearbeitung erfordert, was später Holzpropeller teurer macht als Plastikpropeller. Gleichzeitig ist der Baum ziemlich stark und biegt sich nie. Beachten Sie, dass in ferngesteuerten Flugzeugen noch Holzpropeller verwendet werden.



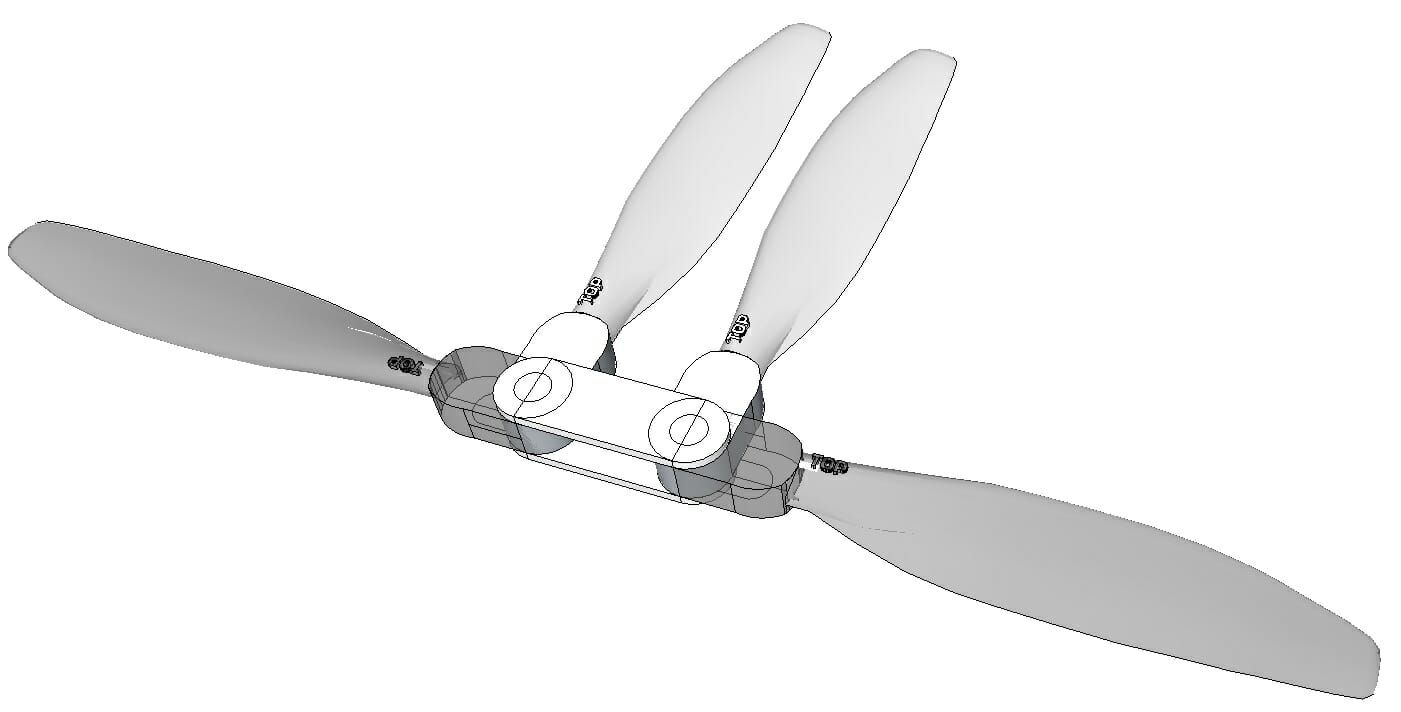
Klappbar
Klappbare Stützen haben einen Mittelteil, der mit zwei Schwenkflügeln verbunden ist. Wenn sich das Zentrum (das mit der Abtriebswelle des Motors verbunden ist) dreht, wirken Zentrifugalkräfte auf die Blätter, drücken sie nach außen und machen den Propeller im Wesentlichen "steif", mit dem gleichen Effekt wie bei einem klassischen nicht faltbaren Propeller. Aufgrund der geringen Nachfrage und einer großen Anzahl benötigter Teile sind Faltpropeller weniger verbreitet. Der Hauptvorteil von Klappprops ist die Kompaktheit, und in Kombination mit einem Klapprahmen können die Transportmaße der Drohne deutlich kleiner sein als die Flugmaße. Ein gleichzeitiger Vorteil des Klappmechanismus ist, dass im Falle eines Absturzes der Propeller nicht vollständig ausgetauscht werden muss, es reicht aus, nur das beschädigte Blatt zu ersetzen.
Installation
Rotoren können wie UAVs eine Vielzahl von Größen haben. Daher gibt es in der Industrie eine Reihe von „Standard“-Motorwellendurchmessern. In diesem Zusammenhang wird der Hauptrotor oft mit einem kleinen Satz Adapterringe geliefert (sie sehen aus wie Unterlegscheiben mit Bohrungen unterschiedlichen Durchmessers in der Mitte), die in die -Mittelbohrung der Stütze
Die Schraube kann je nach der von Ihrem Motor unterstützten Montagemethode am Motor befestigt werden. Wenn die Motorwelle keine Befestigungsmöglichkeiten bietet (Gewindeverbindung, diverse Befestigungsvorrichtungen etc.), werden spezielle Adapter wie Propsaver und Spannzangen verwendet.
- Propsaver
- Spannzangenfutter
Bürstenlose Motoren mit Außenläufer (Typ "Outrunner") haben in der Regel im oberen Teil mehrere Gewindebohrungen. Die Welle eines solchen Motors weist am Ende ein Gewinde auf, dessen Drehrichtung der Drehrichtung des Rotors entgegengesetzt ist. Dieser Ansatz verhindert ein spontanes Lösen der Befestigungsmutter und gewährleistet einen sicheren und zuverlässigen Betrieb der Drohne.
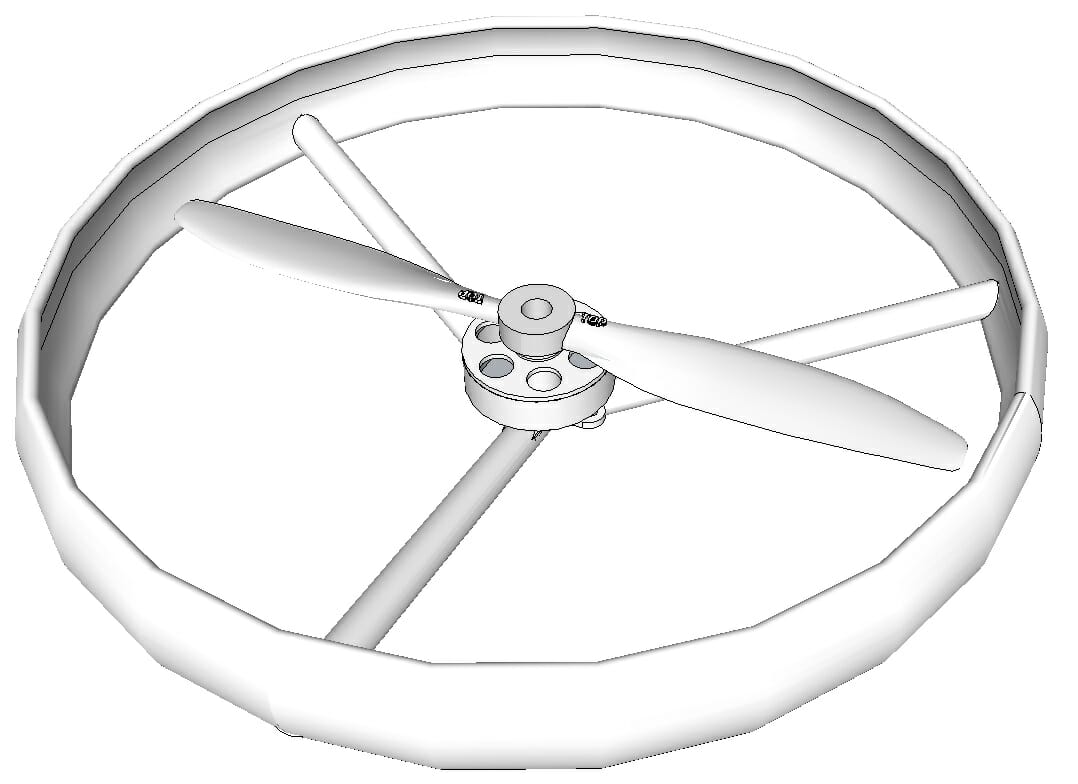
Schutz von Rotoren
Schutz von Rotoren - entworfen, um den direkten Kontakt des UAV-Kraftwerks mit einem entgegenkommenden Objekt auszuschließen und dadurch seine Integrität und Funktionsfähigkeit zu erhalten, sowie um Verletzungen an schnell drehenden Propellern durch Kollisionen mit Menschen und Tieren zu vermeiden. Die Propellerschutze sind am Hauptrahmen befestigt. Je nach Ausführung kann er den Arbeitsbereich des Kraftwerks entweder teilweise überlappen oder komplett (Ringschutz). Propellerschutz wird am häufigsten bei kleinen (Spielzeug-)UAVs verwendet. Die Verwendung von Schutzelementen in der Baugruppe bringt auch eine Reihe von Kompromissen mit sich, darunter:
- Kann übermäßige Vibrationen verursachen.
- Hält im Allgemeinen leichten Schlägen stand.
- Kann den Schub verringern, wenn zu viele Montagefüße unter dem Propeller platziert werden.
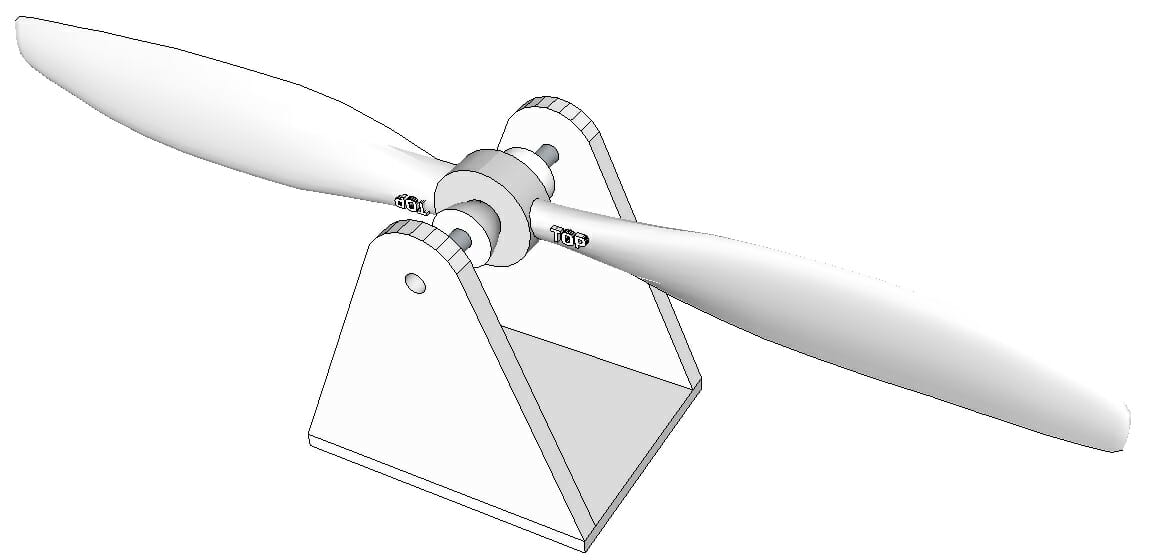
Auswuchten
Schlechte Auswuchtung tritt bei den meisten billigen Propellern auf. Um dies sicherzustellen, müssen Sie nicht weit gehen, sondern einfach einen Bleistift in die zentrale Bohrung der Schraube stecken (bei Unwucht ist in der Regel eine Seite schwerer als die andere). Daher wird dringend empfohlen, die Propeller auszubalancieren, bevor Sie sie an den Motoren installieren. Ein nicht ausgewuchteter Propeller verursacht übermäßige Vibrationen, die sich wiederum negativ auf die Leistung des Flugreglers auswirken (äußerlich in einem falschen Verhalten der Drohne im Flug), ganz zu schweigen von einer Zunahme des Lärms, einem erhöhten Verschleiß der Triebwerkselemente und einer Verschlechterung der Qualität der Aufnahme einer hängenden Kamera.
Der Propeller kann auf verschiedene Weise ausbalanciert werden, aber wenn Sie eine Drohne von Grund auf bauen, dann muss im Arsenal der Werkzeuge eine Preisgünstiger Propellerbalancer, mit dem Sie die Gewichtsunwucht im Propeller einfach und unkompliziert bestimmen können. Um das Gewicht auszugleichen, können Sie entweder den schwersten Teil des Propellers schleifen (der mittlere Teil der Klinge wird gleichmäßig geschliffen, und auf keinen Fall den Propellerteil abschneiden), Sie können auch durch Aufkleben eines Stücks Klebeband (dünn) ausbalancieren auf der leichteren Klinge (die Segmente gleichmäßig hinzufügen, bis das Gleichgewicht erreicht ist). Beachten Sie, dass der Effekt aufgrund des Drehmomentprinzips umso größer ist, je weiter von der Mitte Sie eine Auswuchtaufrüstung (Schleifen oder Hinzufügen eines Riemens) des Propellers vornehmen.
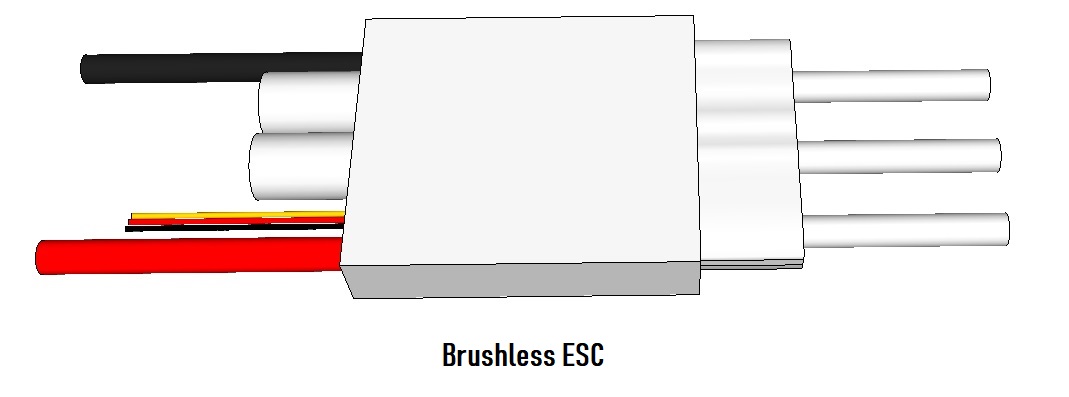
3. ESC
ESC (englischer elektronischer Geschwindigkeitsregler; rus.elektronischer Geschwindigkeitsregler) - ermöglicht es dem Flugregler, die Geschwindigkeit und Richtung des Motors zu steuern. Bei richtiger Spannung muss der ESC max. den Strom, den der Motor aufnehmen kann, und begrenzen auch den Strom, der während des Schaltens durch die Phase fließt. Bei den meisten Drohnen-Hobby-Reglern kann sich der Motor nur in eine Richtung drehen, mit der richtigen Firmware können sie jedoch in beide Richtungen betrieben werden.
Anschluss
Anfangs kann der ESC verwirrend sein, da mehrere Drähte / Pins / Stecker vorhanden sind, um ihn anzuschließen Seiten (ESC kann mit oder ohne Lötanschlüsse geliefert werden).
- Stromversorgung: Zwei dicke Drähte (normalerweise schwarz und rot) dienen der Stromversorgung von der Verteilerplatine / dem Kabelbaum, die direkt von der Hauptbatterie des Flugzeugs mit Strom versorgt wird.
- 3 Anschlüsse: Auf der gegenüberliegenden Seite des Controllers sind drei Anschlüsse für den Anschluss von drei Rundsteckern (normalerweise im Lieferumfang von Motoren enthalten) eines bürstenlosen Motors vorhanden. Die Verwendung von Steckern beim Anschließen des ESC ermöglicht im Bedarfsfall (im Fehlerfall) einen schnellen Reglerwechsel ohne Verwendung eines Lötkolbens. Es kommt vor, dass die mit dem Motor gelieferten kugelförmigen Stecker nicht mit den Steckern am Regler übereinstimmen. In diesem Fall ersetzen Sie sie einfach durch geeignete. Welches der drei ist "Plus" und welches "Minus"? Der Bezugspunkt ist ein einfacher, von der Batterie kommender positiver Draht, der am ESC ins Plus geht, ähnlich mit einem Minus.
- 3-poliger R/C-Servostecker mit dünnen Drähten: über die das vom Empfänger kommende Signal verarbeitet wird, davon eine Leitung Signal (Übertragung des Gassignals an den ESC oder Eingang), das zweite "Minus" (oder Masse) und eine positive Ader (nicht verwendet, wenn kein eingebautes BEC vorhanden ist; mit eingebautem BEC ist es ein 5V-Stromausgang, der später zur Stromversorgung verwendet werden kann Bordelektronik).
BEC
In den Anfängen des Flugzeugmodells wurde ein Verbrennungsmotor als Triebwerk verwendet und die Bordelektronik von einem kleinen Batterie. Mit dem Aufkommen der elektrischen Traktion und der Steuerungen (ESC) wurde in letzteren die sogenannte Batteriebeseitigungsschaltung - BEC (auf Englisch. Battery Eliminator Circuit; oder Bordstromwandler; in der Regel bietet sie) eine zusätzliche Stromquelle mit einer Spannung von 5V bei einem Strom von 1A oder mehr). Mit anderen Worten, es ist ein Spannungswandler, der in der Baugruppe LiPo in eine Spannung verwendet wird, um die Bordelektronik der Drohne zu versorgen.
Beim Zusammenbau des Multirotors müssen alle ESCs an den Flugregler angeschlossen werden, es wird jedoch nur ein BEC benötigt, da sonst Probleme bei der Speisung derselben Leitungen auftreten können. Da es normalerweise keine Möglichkeit gibt, das BEC bei einem ESC zu deaktivieren, ist es am besten, das rote Kabel () zu entfernen und es mit Isolierband für alle bis auf einen ESC zu umwickeln. Es ist auch wichtig, das schwarze Kabel (Masse) als gemeinsame Masse zu belassen.
Firmware
Nicht alle Regler auf dem Markt eignen sich gleichermaßen für Mehrrotoranwendungen. Es ist wichtig zu verstehen, dass bürstenlose Motoren vor dem Aufkommen mehrmotoriger UAVs hauptsächlich als Kraftwerk für ferngesteuerte Autos, Flugzeuge und Hubschrauber verwendet wurden. Die meisten erfordern keine schnellen Reaktionszeiten oder Updates. ESCs mit eingebetteter Software SimonK oder BLHeli können sehr schnell auf eingehende Änderungen reagieren, was in der Regel den Unterschied zwischen stabilem Flug oder Absturz ausmacht.
Stromverteilung
Da jeder ESC vom Hauptakku gespeist wird, muss der Hauptakkuanschluss irgendwie in vier ESCs aufgeteilt werden. Dies geschieht mit dem Power Distribution BoardPower Distribution HarnessDeans
4. Batterie
Chemie
Batterien, die in unbemannten Luftfahrzeugen verwendet werden, bestehen derzeit ausschließlich aus Lithium-Polymer (LiPo), und die Zusammensetzung einiger von ihnen ist ziemlich exotisch - Lithium-Mangan oder anderes Lithium Varianten. Bleisäure ist einfach nicht geeignet und NiMh / NiCd sind immer noch zu schwer für ihre Kapazität und können oft nicht die geforderten hohen Entladeraten liefern. LiPo bietet hohe Leistung und Entladerate bei geringem Gewicht. Die Nachteile sind ihre relativ hohen Kosten und ständige Sicherheitsprobleme (Brandgefahr).
Spannung
In der Praxis benötigen Sie für Ihr UAV nur eine Batterie. Die Spannung dieser Batterie muss mit den von Ihnen ausgewählten BK-Motoren übereinstimmen. Fast alle heute verwendeten Batterien basieren auf Lithium und enthalten mehrere Zellen (Cans) von jeweils 3,7V, wobei 3,7V = 1S (d.h. One-Can-Batterie; 2S ist Two-Can, etc.). Daher hat eine Batterie mit der Bezeichnung 4S wahrscheinlich einen Nennwert von 4 × 3,7 V = 14,8 V. Auch die Anzahl der Dosen hilft Ihnen bei der Entscheidung, welches Ladegerät Sie verwenden sollten. Beachten Sie, dass ein einzelliger Akku mit hoher Kapazität physikalisch wie ein mehrzelliger Akku mit niedriger Kapazität aussehen kann.
Kapazität
Die Batteriekapazität wird in Amperestunden (Ah) gemessen. Kleine Batterien können eine Kapazität von 0,1 Ah (100 mAh) haben, die Batteriekapazität für mittelgroße Drohnen kann von 2-3 Ah (2000 mAh - 3000 mAh) reichen. Je höher die Kapazität, desto länger die Flugzeit und dementsprechend schwerer der Akku. Die Flugzeit eines herkömmlichen UAV kann im Bereich von 10-20 Minuten liegen, was kurzlebig erscheinen mag, aber Sie sollten verstehen, dass die Drohne während des Fluges ständig mit der Schwerkraft kämpft und im Gegensatz zu einem Flugzeug keine Oberflächen hat (Flügel), die bei der Formgebung optimale Auftriebskraft unterstützen.
Entladerate
Die Entladerate von Lithiumbatterien wird in „C“ gemessen, wobei 1C die Batteriekapazität ist (normalerweise in Amperestunden, es sei denn, Sie betrachten eine Drohne der Größe Palme). Die Entladerate der meisten LiPo-Akkus beträgt mindestens 5C (fünffache Kapazität), aber da die meisten Motoren, die in UAVs mit mehreren Rotoren verwendet werden, viel Strom verbrauchen, muss der Akku mit einem unglaublich hohen Strom entladen werden können, was normalerweise der Fall ist etwa 30A oder mehr.
Sicherheit
LiPo-Batterien sind nicht ganz sicher, da sie unter Druck stehendes Wasserstoffgas enthalten und dazu neigen zu brennen und / oder zu explodieren wenn irgendwas stimmt nicht. Wenn Sie also Zweifel an der Gesundheit des Akkus haben, schließen Sie ihn auf keinen Fall an die Drohne oder gar an das Ladegerät an - betrachten Sie ihn als "ausser Betrieb genommen" und entsorgen Sie ihn ordnungsgemäß. Die verräterischen Anzeichen dafür, dass etwas mit der Batterie nicht stimmt, sind Dellen oder Schwellungen (z. B. Gasaustritt). Verwenden Sie zum Laden eines LiPo-Akkus am besten eine sichere LiPo-Box (Akku-Safe). Auch die Batteriespeicherung

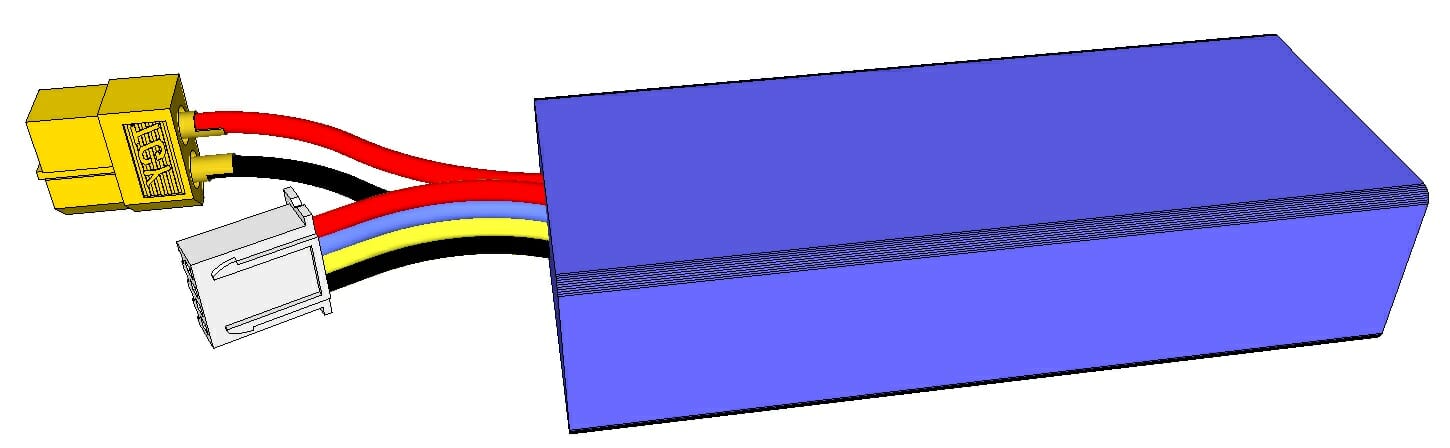
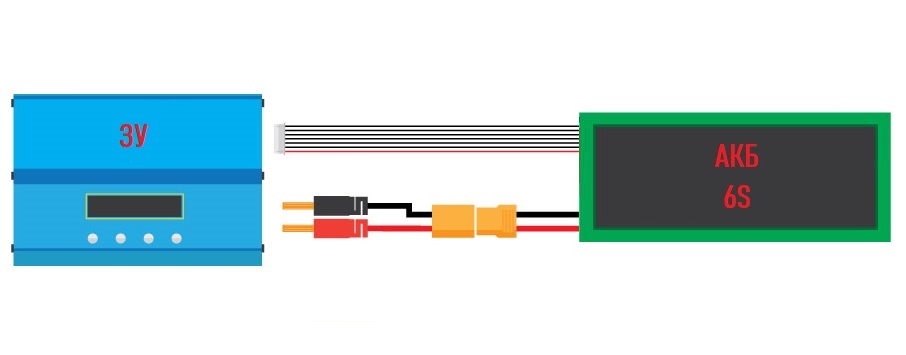
Aufladen
Die meisten LiPo-Akkus haben zwei AnschlüsseDas Ladegerätdie Sicherheitsbedenken im Zusammenhang mit Lithium-Polymer-Batterien
.Montage
Der Akku ist das schwerste Element der Drohne, daher sollte er im mittleren Totpunkt installiert werden, um sicherzustellen die gleiche Belastung der Motoren. Der Akku erfordert keine spezielle Befestigung (insbesondere selbstschneidende Schrauben, die den LiPo beschädigen und einen Brand verursachen können), sodass einige heute verwendete Befestigungsmethoden Klettbänder, Gummi, Kunststofffächer und andere umfassen. Die gebräuchlichste Möglichkeit zur Akkubefestigung besteht darin, den Akku mit einem Klettband unter dem Rahmen aufzuhängen.







