Contents
- DIY drone: Lesson 1. Terminology.
- Do-it-yourself drone: Lesson 2. Frames.
- Do-it-yourself drone: Lesson 3. Power plant.
- Do-it-yourself drone: Lesson 4. Flight controller.
- Do-it-yourself drone: Lesson 5. Assembly.
- Do-it-yourself drone: Lesson 6. Performance check.
- Do-it-yourself drone: Lesson 7. FPV and distance.
- Drone with your own hands: Lesson 8. Airplanes.
Introduction
Now that you have selected or built a frame, the next step is to select the correct powertrain. Since most of the existing drones are electric, we will focus on generating purely electric propulsion through brushless DC motors. The power plant includes motors, rotors (propellers, abbreviated props), ESC and a storage battery.
1. Motor
Which motors you use in your assembly will determine what maximum load the drone can lift, as well as how long it can be in flight. The power plant must necessarily consist of motors of the same brand and model, this approach will provide it with a balanced operation. It should be noted that even absolutely identical (Brand / Model) motors can have a slight difference in speed, which is subsequently leveled by the flight controller.
Brushed vs Brushless
In Brushed motors, the wound rotor rotates inside the stator on which the magnets are rigidly fixed. In Brushless motors, everything is a revolution; the winding is fixed rigidly to the inside of the stator, and the magnets are mounted on the shaft and rotate. In most cases, you will only consider brushless DC motors (BC). Motors of this type are widely used in the amateur radio industry to assemble products ranging from helicopters and airplanes to drive systems in cars and boats.
Pancake brushless motors are larger in diameter, flatter and generally have high torque and lower KV (details below). Small-sized UAVs (usually palm-sized) often use small brushed motors due to their lower cost and simple two-wire controller. While brushless motors come in different sizes and specifications, choosing a smaller size does not mean it will be cheaper.

Inrunner vs Outrunner
There are several types of brushless DC motors:
- Inrunner is an inner rotor. The winding is fixed to the stator, the magnets are mounted on the rotor shaft, which rotates (usually used on RC boats, helicopters and cars due to the high KV).
- Outrunner - outer rotor. The magnets are fixed to a stator that rotates around a stationary winding. The bottom of the motor is fixed.(as a rule, motors of this type have more torque).
- Hybrid Outrunner is technically an "Outrunner" but implemented in an "Inrunner" package. This approach made it possible to combine in one type the "Outrunner" torque and the absence of external rotating elements as in motors of the "Inrunner" type.
KV
KV rating - max. the number of revolutions that the motor can develop without loss of power at a given voltage. For most multi-rotor UAVs, a low KV value (for example, from 500 to 1000) is relevant, as this helps to ensure stability. While for acrobatic flight, a KV value between 1000 and 1500 will be relevant, in tandem with smaller diameter rotors (propellers). Let's say the KV value for a particular motor is 650 rpm, then at a voltage of 11.1V the motor will rotate at a speed of: 11.1 × 650 = 7215 rpm, and if you use the motor at a lower voltage (say 7.4V), then the rotational speed will be: 7.4 × 650 = 4810 rpm. It is important to note, however, that using low voltage generally means higher current consumption (Power = Current × Voltage).
Thrust
Some manufacturers of brushless motors may specify in the specification information about the maximum possible thrust (Thrust) generated by the motor in conjunction with the recommended main rotor. The unit of measure for thrust is usually kilogram (Kg / Kg), pound (Lbs) or Newton (N). For example, if you are building a quadrocopter and you know the thrust value of a single motor = up to 0.5kg in a compartment with an 11-inch rotor, then at the output four such motors can be lifted at maximum thrust: 0.5kg × 4 = 2kg. Accordingly, if the total weight of your quadcopter is slightly less than 2kg, then with such a power plant it will take off only at maximum rpm (max thrust). In this case, it will be relevant either to choose a more powerful rotor motor bundle, which will provide more thrust, or to reduce the total weight of the drone. At max. thrust of the power plant = 2kg, the weight of the drone should be no more than half of this value (1kg, including the weight of the motors themselves). A similar calculation can be done for any configuration. Suppose the weight of the hexacopter (including frame, motors, electronics, accessories, etc.) is 2.5kg. This means that each engine for such an assembly must provide (2.5kg ÷ 6 motors) × 2 = 0.83kg thrust (or more). Now you know how to calculate the optimal thrust of the motors based on the total weight, but before making a decision, we suggest that you familiarize yourself with the sections below.
Additional considerations
- Connectors: DC brushed motors have two connectors "" and "-". Changing the wires in places changes the direction of rotation of the motor.
- Connectors: Brushless DC motors have three connectors. To find out how to connect them, as well as how to change the direction of rotation, refer to the ESC section below.
- Windings: The windings affect the KV of the motors. If you need the lowest KV value but give priority to torque, it is best to turn your attention to the Pancake type brushless DC motors.
- Mounting: Most manufacturers have a general wiring diagram for DC motors for DC motors, which allows frame companies to avoid making so-called adapters. The template is usually metric, with two holes 16mm apart, and two more holes 19mm apart (90 ° to the first).
- Thread: The mounting thread used to attach the brushless motor to the frame may vary. The usual metric sizes of screws are M1, M2 and M3, imperial sizes can be 2-56 and 4-40.
2. Main rotors (Propellers)
Main rotors (propellers, abbreviated props) for multi-rotor UAVs originate from the propellers of radio-controlled aircraft. Many will ask: why not use helicopter blades? Even though this has already been done, imagine the dimensions of a hexacopter with helicopter blades. It is also worth noting that the helicopter system requires a change in the pitch of the blades, and this significantly complicates the design.
You may also ask why not use a turbojet engine, a turbofan engine, a turboprop engine, etc.? Surely they are incredibly good at providing a lot of thrust, but they also require a lot of energy. If the drone's primary concern is to move very quickly rather than hovering in a confined space, one of the above motors might be a good option.
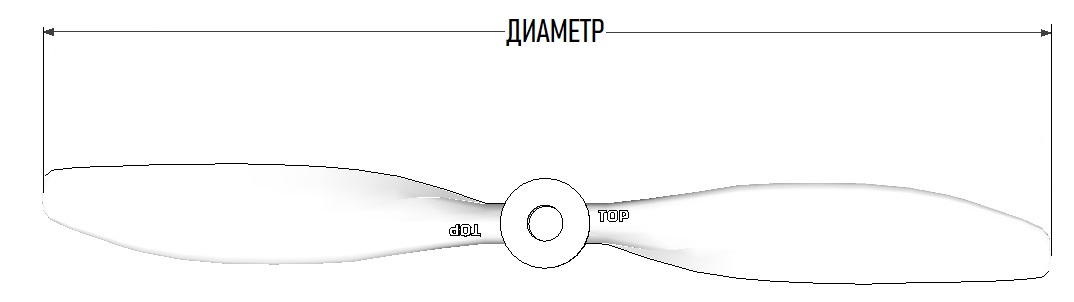
Blades and diameter
The main rotor of most multi-rotor UAVs has two or three blades. The most widely used propellers are with two blades. Don't assume that adding more blades will automatically increase thrust; each blade works in the flow disturbed by the previous blade, reducing the efficiency of the propeller. The main rotor of a small diameter has less inertia and therefore it is easier to accelerate and decelerate, which is important for acrobatic flight.

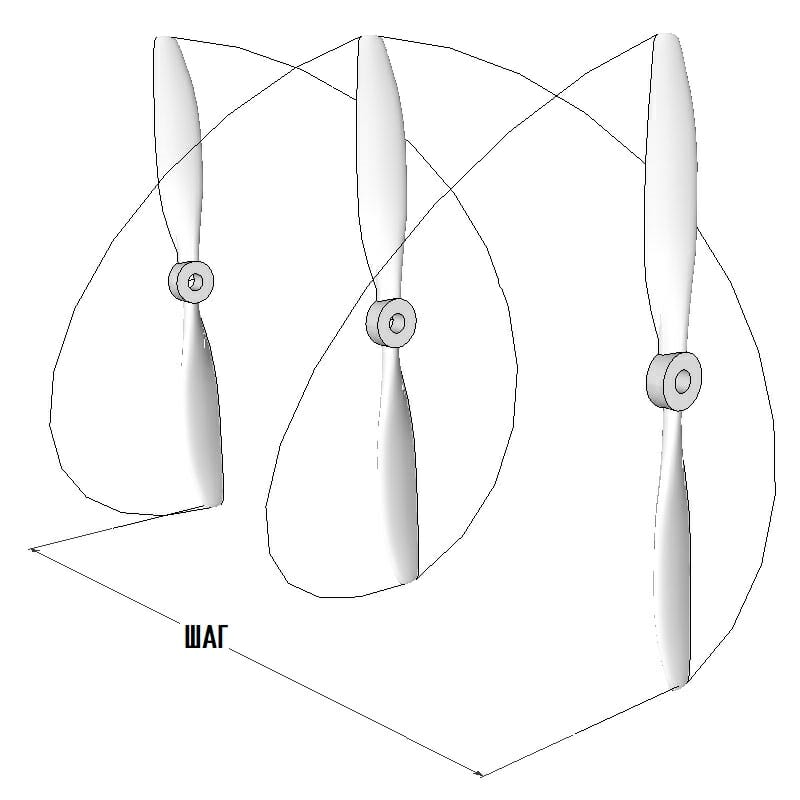
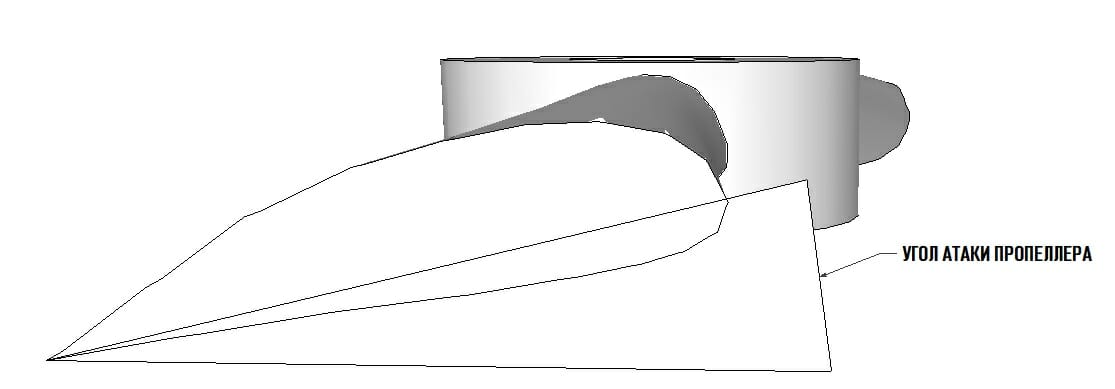
Pitch / Angle of Attack / Efficiency / Thrust
The thrust generated by the main rotor depends on the density of air, the number of revolutions of the propeller, its diameter, the shape and area of the blades, as well as its pitch. The efficiency of a propeller is related to the angle of attack, which is defined as the pitch of the blade minus the helix angle (the angle between the resulting relative speed and the direction of rotation of the blade). Efficiency itself is the ratio of output power to input power. Most well-designed propellers are more than 80% efficient. The angle of attack is influenced by the relative speed, so the propeller will have different efficiency at different motor speeds. The leading edge of the main rotor blade also greatly affects efficiency, and it is very important that it is as smooth as possible. While a variable pitch design would be best, the additional complexity required over the inherent simplicity of multi-rotor means that a variable pitch propeller is almost never used.
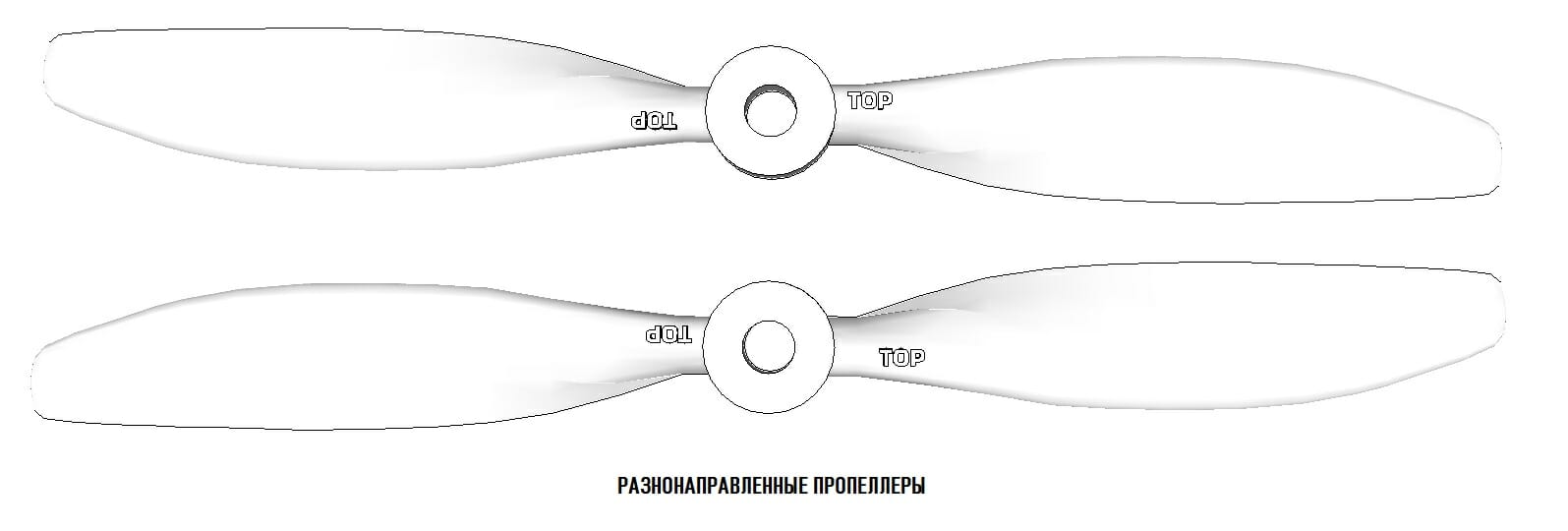
Rotation
The rotors are designed for clockwise rotation (CW), or counterclockwise (CCW). The direction of rotation is indicated by the inclination of the blade ( look at the propeller from the endVtailY6X8
Materials of execution
Material (s) used for the manufacture of rotors (propellers) may have a moderate effect on flight performance but safety should be a top priority, especially if you are a beginner and inexperienced.
- Plastic (ABS / Nylon, etc.) is the most popular choice when it comes to multi-engine UAVs. This is largely due to the low cost, decent flight characteristics and exponential durability. Typically, in the event of a crash, at least one propeller is broken, and while you master the drone and learn to fly, you will always have a lot of broken props. The stiffness and impact resistance of the plastic screw can be improved by reinforcing with carbon fiber (carbon), this approach is max. effective and not so expensive compared to a fully-fledged and carbon fiber propeller.
- Fiber-reinforced polymer (carbon fiber, carbon-reinforced nylon, etc.) - is the "advanced" technology in many relationship. Carbon fiber parts are still not very easy to manufacture, and therefore you pay more for them than for a regular plastic screw with similar parameters. A propeller made of carbon fiber is harder to break or bend, and therefore, if it crashes, it will do more damage to anything it comes into contact with. At the same time, carbon propellers are generally well made, stiffer (providing minimal loss in efficiency), rarely need balancing, and are lighter in weight than any other material. It is recommended to consider such propellers only after the user's level of piloting becomes comfortable.
- Wood is a rarely used material for the production of multi-rotor UAV rotors, since their manufacture requires mechanical processing, which later makes wooden propellers more expensive than plastic ones. At the same time, the tree is quite strong and never bends. Note that wooden propellers are still used in radio-controlled aircraft.



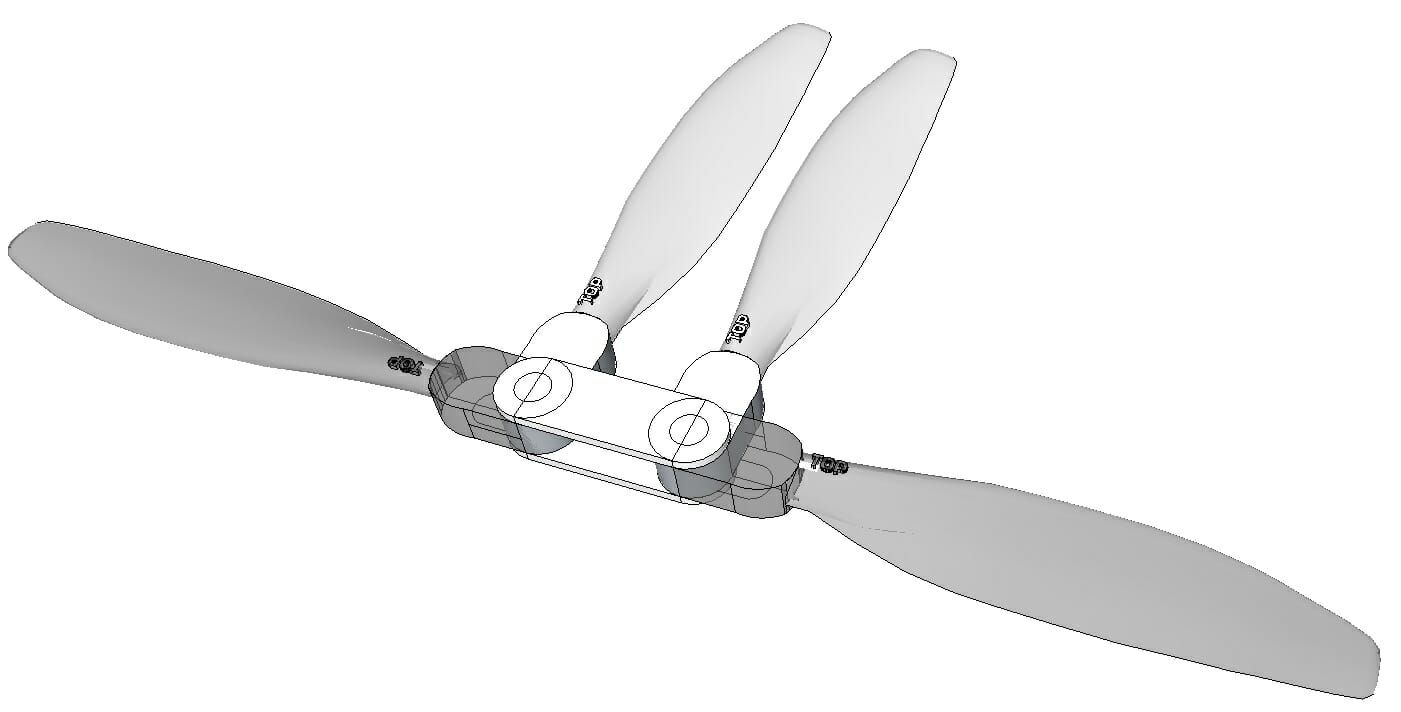
Foldable
Foldable props have a central part that connects to two swivel blades. When the center (which is connected to the output shaft of the motor) rotates, centrifugal forces act on the blades, pushing them outward and essentially making the propeller "stiff," with the same effect as a classic non-folding propeller. Due to low demand and a large number of required parts, folding propellers are less common. The main advantage of folding props is compactness, and in combination with a folding frame, the transport dimensions of the drone can be significantly smaller than flight dimensions. A concomitant advantage of the folding mechanism is the absence of the need, in case of a crash, to change the propeller entirely, it will be enough to replace only the damaged blade.
Installation
Like UAVs, rotors can have a wide range of sizes. Thus, there are a number of “standard” motor shaft diameters in the industry. In this connection, the main rotor is often supplied with a small set of adapter rings (they look like washers with holes of different diameters in the center), which are installed in the center bore of the prop
The screw can be fixed to the motor based on which mounting method is supported by your motor. If the motor shaft does not imply any fastening options (threaded connection, various fastening devices, etc.), then special adapters are used, such as propsavers and collet clamps.
- Propsaver
- Collet chuck
Brushless motors with an outer rotor (type "Outrunner"), as a rule, in the upper part of it, have several threaded holesis an equally popular option for attaching the propeller to the BC motor shaft. The shaft of such a motor at the end has a thread, the direction of which is opposite to the direction of rotation of the rotor. This approach eliminates spontaneous loosening of the fixing nut, ensuring safe and reliable operation of the drone.
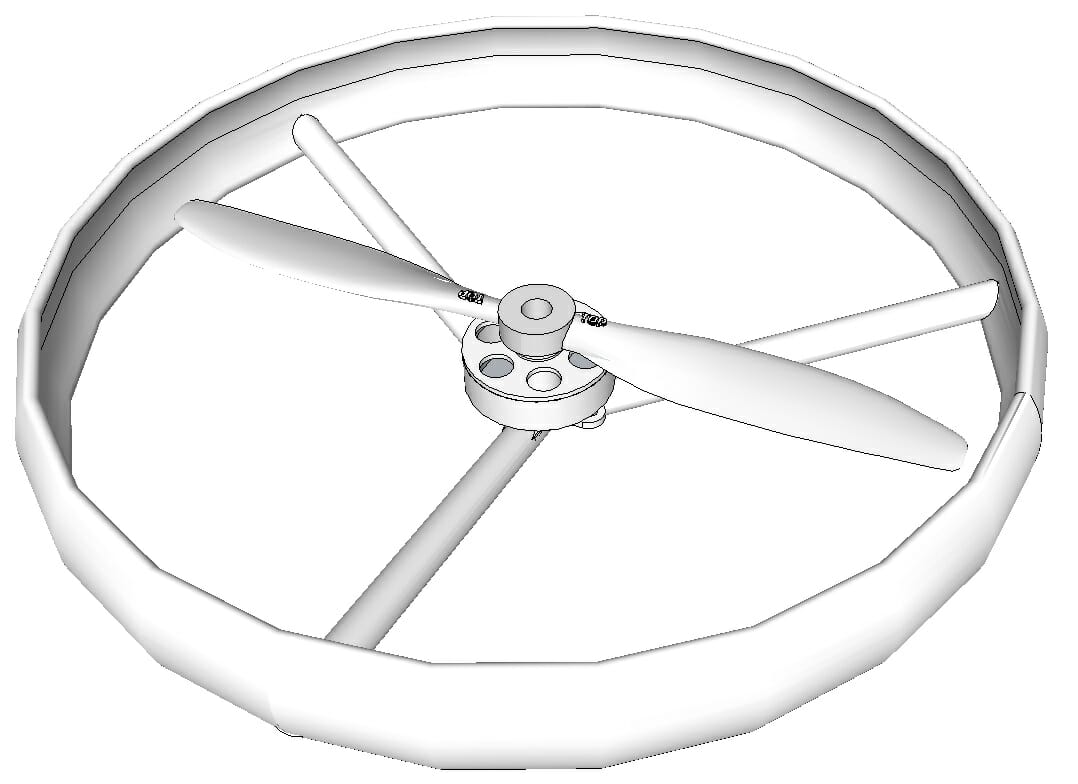
Protection of rotors
Protection of rotors - designed to exclude direct contact of the UAV's power plant with an oncoming object, thereby preserving its integrity and operability, as well as to prevent injury o rapidly rotating propellers as a result of collisions with people and animals. The propeller guards are attached to the main frame. Depending on the version, it can either partially overlap the working area of the power plant, or completely (ring protection). Propeller protection is most often used on small (toy) UAVs. The use of protective elements in the assembly also brings a number of compromises, among which:
- May cause excessive vibration.
- Generally withstands light blows.
- May reduce thrust if too many mounting feet are placed under the propeller.
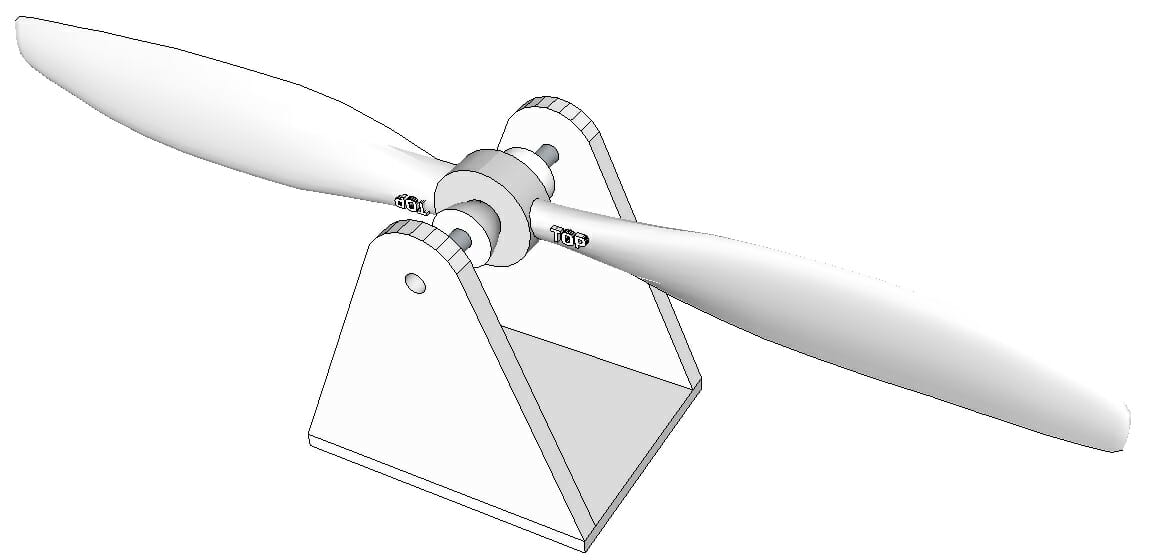
Balancing
Poor balancing occurs on most inexpensive propellers. To make sure of this, you don't have to go far, just insert a pencil into the central bore of the screw (as a rule, with an imbalance, one side will be heavier than the other). Therefore, it is highly recommended to balance your props before installing them on the motors. An unbalanced propeller will cause excessive vibrations, which in turn negatively affect the flight controller's performance (manifested in incorrect behavior of the drone in flight), not to mention an increase in noise, increased wear of the power plant elements and a deterioration in the quality of the suspended camera.
The propeller can be counterbalanced in different ways, but if you are building a drone from scratch, then in the arsenal of tools there must be an inexpensive propeller balancer that allows you to easily and simply determine the weight imbalance in the propeller. To equalize the weight, you can either grind the heaviest part of the prop (grind the center part of the blade evenly, and in no case cut off the propeller part), you can also balance by sticking a piece of tape (thin) on the lighter blade (add the segments evenly until until balance is reached). Note that the further from the center you make a balancing upgrade (sanding or adding a belt) of the propeller, the greater the effect based on the principle of torque will be.
3. ESC
ESC (English Electronic Speed Controller; rus.electronic speed controller) - allows the flight controller to control the speed and direction of the motor. With the correct voltage, the ESC must be able to withstand max. the current that the motor can consume, and also limit the current passing through the phase during switching. Most drone hobby ESCs only allow the motor to rotate in one direction, however with the correct firmware they can operate in both directions.
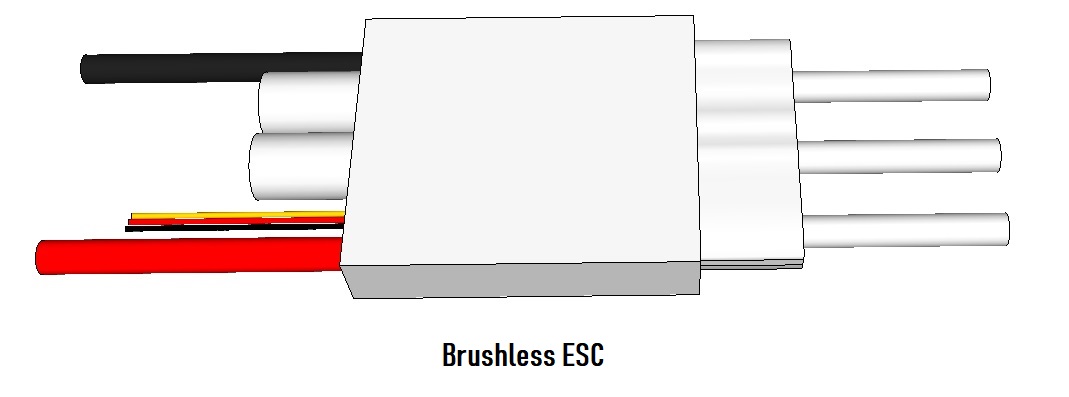
Connection
Initially, the ESC can be confusing because there are several wires / pins / connectors available to connect it. two sides (ESC can come with or without soldered connectors).
- Power Supply: Two thick wires (usually black and red) are provided to supply power from the distribution board / harness to which power comes directly from the aircraft's main battery.
- 3 connectors: Three connectors are available on the opposite side of the controller for connecting to three bullet connectors (usually supplied with motors) on a brushless motor. The use of connectors when connecting the ESC allows, if necessary (in case of failure), to quickly change the controller without using a soldering iron. It happens that the bullet-shaped connectors that come with the motor do not match the connectors on the regulator, in which case, simply replace with suitable ones. Which of the three is "plus" and which is "minus"? The reference point is a simple, coming positive wire from the battery, goes into positive on ESC, similarly with a minus.
- 3-pin R / C servo connector with thin wires: through which the signal coming from the receiver is processed, of which one wire is signal (transmission of the gas signal to the ESC or input), the second "Minus" (or ground), and a positive wire (not used if there is no built-in BEC; with built-in BEC, it is a 5V power output, which can later be used to power on-board electronics).
BEC
In the early days of aircraft modeling, an internal combustion engine was used as the power plant, and the onboard electronics was powered by a small battery. With the advent of electric traction and controllers (ESC), in the latter, the so-called battery elimination circuit - BEC (in English Battery Eliminator Circuit; or onboard power converter; as a rule, provides an additional current source with a voltage of 5V at a current of 1A, or above). In other words, it is a voltage converter used in the assembly LiPo into a voltage to power the on-board electronics of the drone.
When assembling the multi-rotor, all ESCs must be connected to the flight controller, but only one BEC is required, otherwise problems may arise when powering the same lines. Since there is usually no way to disable the BEC on an ESC, it is best to remove the red wire () and wrap it with electrical tape for all but one ESC. It is also important to leave the black wire (ground) for the common ground.
Firmware
Not all ESCs on the market are equally good for multi-rotor applications. It is important to understand that before the advent of multi-engine UAVs, brushless motors were used primarily as a power plant for radio-controlled cars, airplanes and helicopters. Most do not require fast response times or updates. ESCs with embedded SimonK or BLHeli software are able to react very quickly to incoming changes, which generally makes the difference between stable flight or crash.
Power Distribution
Since each ESC is powered by the main battery, the main battery connector must somehow be split into four ESCs. This is done using the Power Distribution BoardPower Distribution HarnessDeans
4. Battery
Chemistry
Batteries used in unmanned aerial vehicles are currently exclusively lithium polymer (LiPo), and the composition of some of them is quite exotic - lithium manganese or other lithium variants. Lead acid is simply not suitable and NiMh / NiCd are still too heavy for their capacity and often cannot provide the high discharge rates required. LiPo offers high performance and discharge rate while being lightweight. The disadvantages are their relatively high cost and constant safety problems (fire hazard).
Voltage
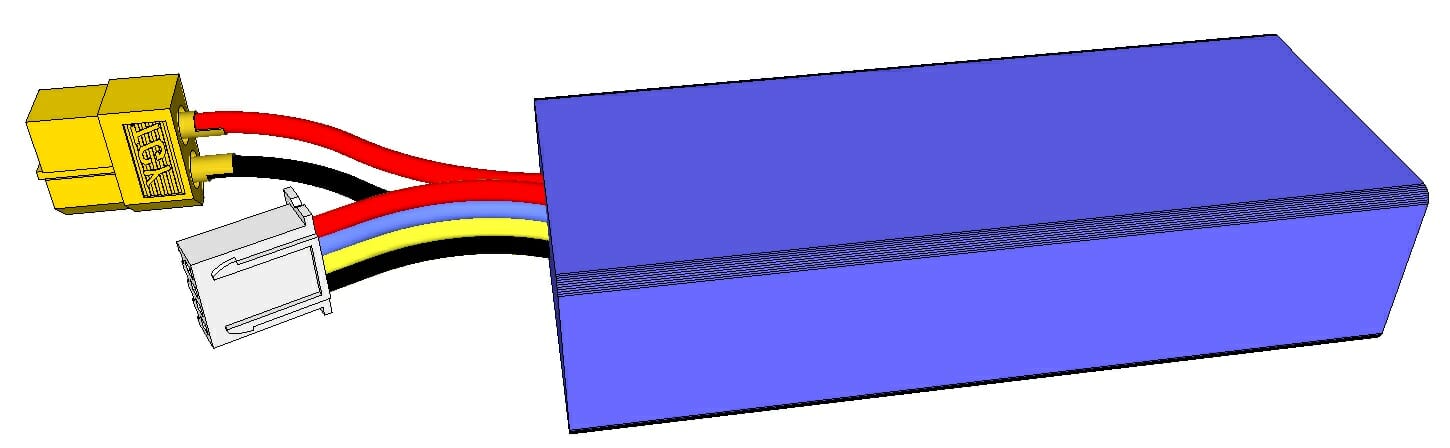
In practice, you only need one battery for your UAV. The voltage of this battery must match the BK motors you have selected. Almost all batteries used today are based on lithium and contain several cells (cans) of 3.7V each, where 3.7V = 1S (i.e. one-can battery; 2S is two-can, etc.). Therefore, a battery labeled 4S is likely to have a nominal value of 4 × 3.7V = 14.8V. Also, the number of cans will help you determine which charger to use. Note that a high-capacity single-cell battery may physically look like a low-capacity multi-cell battery.
Capacity
Battery capacity is measured in ampere-hours (Ah). Small batteries can have a capacity of 0.1Ah (100mAh), battery capacity for medium-sized drones can range from 2-3Ah (2000mAh - 3000mAh). The higher the capacity, the longer the flight time, and, accordingly, the heavier the battery. The flight time of a conventional UAV can be in the range of 10-20 minutes, which may seem short-lived, but you should understand that the drone constantly struggles with gravity during the flight, and unlike an airplane, it does not have surfaces (wings) that provide assistance in the form optimal lifting force.
Discharge Rate
Lithium Battery Discharge Rate is measured in “C” where 1C is the battery capacity (usually in ampere hours unless you are considering a drone the size of Palm). The discharge rate of most LiPo batteries is at least 5C (five times the capacity), but since most motors used in multi-rotor UAVs draw a lot of current, the battery must be able to discharge at an incredibly high current, which is usually about 30A or more.
Safety
LiPo batteries are not entirely safe as they contain pressurized hydrogen gas and have a tendency to burn and / or explode when anything something is wrong. Thus, if you have any doubts about the health of the battery, do not in any way connect it to a drone or even to a charger - consider it "decommissioned" and dispose of it properly. The telltale signs that something is wrong with the battery are dents or swelling (i.e. gas leakage). When charging a LiPo battery, it is best to use a safe LiPo box (Battery safe box). Battery storage

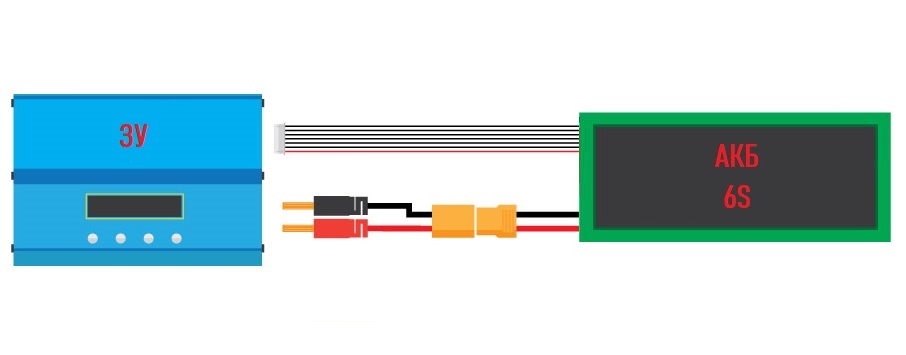
Charging
Most LiPo batteries have two connectorsThe chargerthe safety concerns associated with lithium polymer batteries
.Mounting
The battery is the heaviest element of the drone, so it should be installed at the center dead center to ensure the same load on motors. The battery does not involve any special mounting (especially self-tapping screws that can damage the LiPo and cause a fire), so some mounting methods used today include Velcro straps, rubber, plastic compartments, and others. The most common battery mounting option is to hang the battery under the frame using a Velcro strap.







