Isi
- drone DIY: Pelajaran 1. Terminologi.
- Drone buat sendiri: Pelajaran 2. Bingkai.
- Drone buat sendiri: Pelajaran 3. Loji janakuasa.
- drone buatan sendiri: Pelajaran 4. Pengawal penerbangan.
- Drone buat sendiri: Pelajaran 5. Perhimpunan.
- Drone buat sendiri: Pelajaran 6. Pemeriksaan prestasi.
- Drone buat sendiri: Pelajaran 7. FPV dan jarak.
- Drone dengan tangan anda sendiri: Pelajaran 8. Kapal terbang.
Pendahuluan
Setelah anda memilih atau membina bingkai, langkah seterusnya adalah memilih powertrain yang betul. Oleh kerana kebanyakan drone yang ada adalah elektrik, kami akan menumpukan perhatian untuk menghasilkan dorongan elektrik semata-mata melalui motor DC tanpa berus. Loji janakuasa merangkumi motor, rotor (baling-baling, alat penyokong yang disingkat), ESC dan bateri simpanan.
1. Motor
Motor mana yang anda gunakan dalam pemasangan anda akan menentukan muatan maksimum yang dapat ditarik oleh drone, dan berapa lama ia dapat dalam penerbangan. Loji janakuasa mesti terdiri daripada motor dengan jenama dan model yang sama, pendekatan ini akan memberikan operasi yang seimbang. Perlu diperhatikan bahawa motor yang sama sekali sama (Jenama / Model) dapat memiliki sedikit perbezaan dalam kecepatan, yang kemudian diratakan oleh pengendali penerbangan.
Brushed vs Brushless
Pada motor Brushed, rotor luka berputar di dalam stator di mana magnet dipasang dengan kaku. Pada motor tanpa berus, semuanya berpusing; belitan dipasang dengan kaku ke bahagian dalam stator, dan magnet dipasang pada batang dan berpusing. Dalam kebanyakan kes, anda hanya akan mempertimbangkan motor DC tanpa berus (BC). Motor jenis ini banyak digunakan dalam industri radio amatur untuk memasang produk mulai dari helikopter dan kapal terbang hingga sistem pemanduan di dalam kereta dan kapal.
Motor tanpa sikat pancake berdiameter lebih besar, lebih rata dan umumnya mempunyai tork tinggi dan KV yang lebih rendah (perincian di bawah). UAV bersaiz kecil (biasanya bersaiz sawit) sering menggunakan motor berus kecil kerana kosnya yang rendah dan pengawal dua dawai yang sederhana. Walaupun motor tanpa berus datang dalam pelbagai ukuran dan spesifikasi, memilih ukuran yang lebih kecil tidak bererti ia akan lebih murah.

Inrunner vs Outrunner
Terdapat beberapa jenis motor DC tanpa berus:
- Inrunner adalah pemutar dalaman. Penggulungan dipasang pada stator, magnet dipasang pada poros rotor, yang berputar (biasanya digunakan pada kapal RC, helikopter dan kereta kerana KV yang tinggi).
- Keluar - pemutar luar. Magnet dipasang pada stator yang berputar di sekitar belitan pegun. Bahagian bawah motor terpaku.(sebagai peraturan, motor jenis ini mempunyai lebih banyak tork).
- Hybrid Outrunner secara teknikal adalah "Outrunner" tetapi dilaksanakan dalam pakej "Inrunner". Pendekatan ini memungkinkan untuk menggabungkan dalam satu jenis tork "Outrunner" dan ketiadaan elemen berputar luaran seperti pada motor jenis "Inrunner".
KV
Peringkat KV - maks. bilangan putaran yang dapat dikembangkan oleh motor tanpa kehilangan kuasa pada voltan tertentu. Bagi kebanyakan UAV multi-rotor, nilai KV rendah (misalnya, dari 500 hingga 1000) adalah relevan, kerana ini membantu memastikan kestabilan. Sementara untuk penerbangan akrobatik, nilai KV antara 1000 dan 1500 akan relevan, bersamaan dengan rotor berdiameter lebih kecil (baling-baling). Katakan nilai KV untuk motor tertentu ialah 650 rpm, maka pada voltan 11.1V motor akan berputar pada kelajuan: 11.1 × 650 = 7215 rpm, dan jika anda menggunakan motor pada voltan yang lebih rendah (katakanlah 7.4V, maka kelajuan putaran akan: 7.4 × 650 = 4810 rpm. Penting untuk diperhatikan, bagaimanapun, bahawa menggunakan voltan rendah secara amnya bermaksud penggunaan arus yang lebih tinggi (Daya = Arus × Voltan).
Dorong
Beberapa pengeluar motor tanpa berus boleh menentukan dalam spesifikasi maklumat mengenai tujahan maksimum (Dorong) yang dihasilkan oleh motor bersama dengan rotor utama yang disyorkan. Unit ukuran tujahan biasanya kilogram (Kg / Kg), pound (Lbs) atau Newton (N). Sebagai contoh, jika anda membina sebuah quadrocopter dan anda mengetahui nilai tujahan satu motor = hingga 0.5kg di sebuah petak dengan rotor 11-inci, maka pada keluarannya empat motor seperti itu dapat diangkat pada daya dorong maksimum: 0.5kg × 4 = 2kg. Oleh itu, jika berat keseluruhan quadcopter anda sedikit kurang dari 2kg, maka dengan loji kuasa seperti itu, ia hanya akan melepaskan pada rpm maksimum (daya tujah maksimum). Dalam kes ini, adalah penting sama ada memilih bundle motor rotor yang lebih kuat, yang akan memberikan daya tuju lebih banyak, atau untuk mengurangkan berat keseluruhan drone. Pada maksimum daya tuju loji janakuasa = 2kg, berat drone tidak boleh melebihi separuh dari nilai ini (1kg, termasuk berat motor itu sendiri). Pengiraan serupa boleh dilakukan untuk sebarang konfigurasi. Katakan berat heksacopter (termasuk bingkai, motor, elektronik, aksesori, dll.) Ialah 2.5kg. Ini bermaksud bahawa setiap enjin untuk pemasangan sedemikian mesti menyediakan (2.5kg ÷ 6 motor) × 2 = tujahan 0.83kg (atau lebih). Sekarang anda tahu bagaimana mengira daya tuju motor yang optimum berdasarkan jumlah berat, tetapi sebelum membuat keputusan, kami mencadangkan agar anda membiasakan diri dengan bahagian di bawah.
Pertimbangan tambahan
- Penyambung: Motor disikat DC mempunyai dua penyambung "" dan "-". Mengubah wayar di tempat mengubah arah putaran motor.
- Penyambung: Motor DC tanpa berus mempunyai tiga penyambung. Untuk mengetahui cara menghubungkannya, serta cara mengubah arah putaran, rujuk bahagian ESC di bawah.
- Gulungan: Gulungan mempengaruhi KV motor. Sekiranya anda memerlukan nilai KV terendah tetapi mengutamakan tork, lebih baik anda mengalihkan perhatian kepada motor DC tanpa berus jenis Pancake.
- Pemasangan: Sebilangan besar pengeluar mempunyai gambarajah pendawaian umum untuk motor DC untuk motor DC, yang membolehkan syarikat bingkai untuk mengelakkan membuat penyesuai yang disebut. Templat biasanya berukuran metrik, dengan dua lubang terpisah 16mm, dan dua lubang lagi 19mm (90 ° hingga yang pertama).
- Benang: Benang pemasangan yang digunakan untuk memasang motor tanpa berus ke bingkai mungkin berbeza. Skru ukuran metrik yang biasa adalah M1, M2 dan M3, ukuran imperial boleh 2-56 dan 4-40.
2. Rotor utama (Baling-baling)
Rotor utama (baling-baling, penyangga yang disingkat) untuk UAV multi-rotor berasal dari baling-baling pesawat yang dikendalikan radio. Ramai yang akan bertanya: mengapa tidak menggunakan bilah helikopter? Walaupun ini sudah dilakukan, bayangkan dimensi hexacopter dengan bilah helikopter. Perlu juga diperhatikan bahawa sistem helikopter memerlukan perubahan pada nada bilah, dan ini merumitkan reka bentuk dengan ketara.
Anda juga mungkin bertanya mengapa tidak menggunakan mesin turbojet, mesin turbofan, turboprop, dll.? Tentunya mereka sangat hebat dalam memberikan banyak daya tarikan, tetapi mereka juga memerlukan banyak tenaga. Sekiranya perhatian utama drone adalah bergerak dengan cepat dan bukannya melayang di ruang terkurung, salah satu motor di atas mungkin merupakan pilihan yang baik.
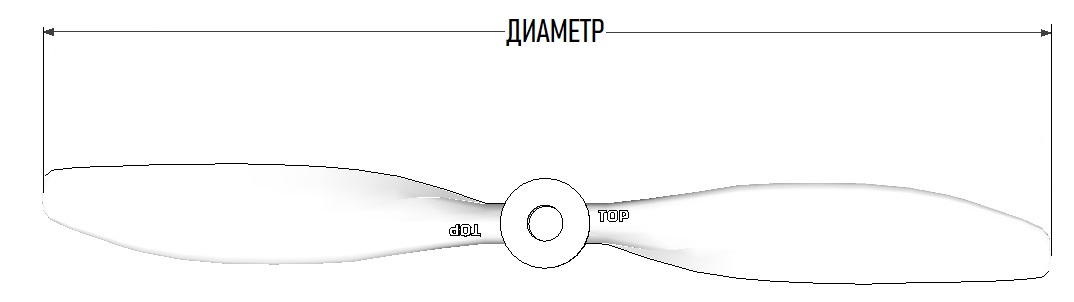
Bilah dan diameter
Rotor utama kebanyakan UAV multi-rotor mempunyai dua atau tiga bilah. Baling-baling yang paling banyak digunakan adalah dengan dua bilah. Jangan menganggap bahawa menambahkan lebih banyak bilah secara automatik akan meningkatkan daya tuju; setiap bilah berfungsi dalam aliran yang terganggu oleh bilah sebelumnya, mengurangkan kecekapan baling-baling. Rotor utama berdiameter kecil mempunyai sedikit inersia dan oleh itu lebih mudah untuk mempercepat dan melambatkan, yang penting untuk penerbangan akrobatik.

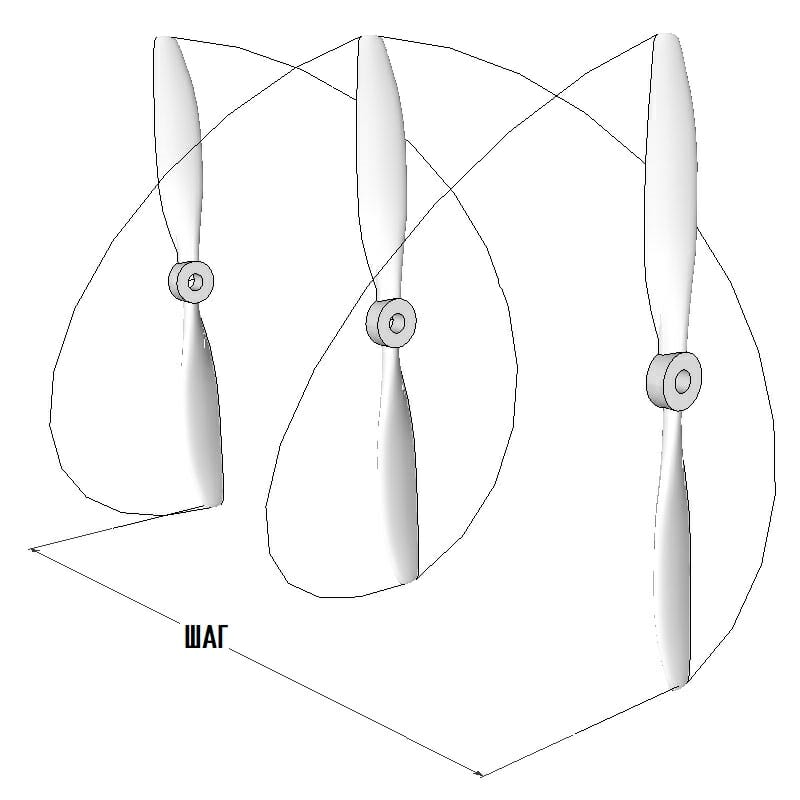
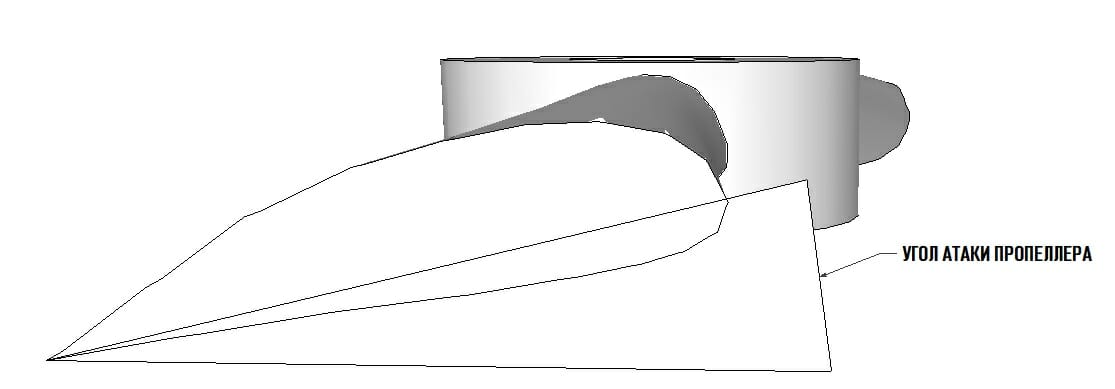
Pitch / Angle of Attack / Efficiency / Thrust
Dorong yang dihasilkan oleh rotor utama bergantung pada ketumpatan udara, bilangan putaran baling-baling, diameternya, bentuk dan luas bilah, serta nada. Kecekapan baling-baling berkaitan dengan sudut serangan, yang ditakrifkan sebagai nada pisau dikurangi sudut heliks (sudut antara kecepatan relatif yang dihasilkan dan arah putaran pisau). Kecekapan itu sendiri adalah nisbah daya output ke daya input. Sebilangan besar baling-baling yang direka dengan baik lebih daripada 80% cekap. Sudut serangan dipengaruhi oleh kelajuan relatif, jadi baling-baling akan mempunyai kecekapan yang berbeza pada kecepatan motor yang berbeza. Kecekapan juga sangat dipengaruhi oleh tepi depan bilah pemutar utama, dan sangat penting ia sehalus mungkin. Walaupun reka bentuk nada berubah-ubah adalah yang terbaik, kerumitan tambahan yang diperlukan atas kesederhanaan multi-rotor yang wujud bermaksud bahawa baling-baling nada berubah hampir tidak pernah digunakan.
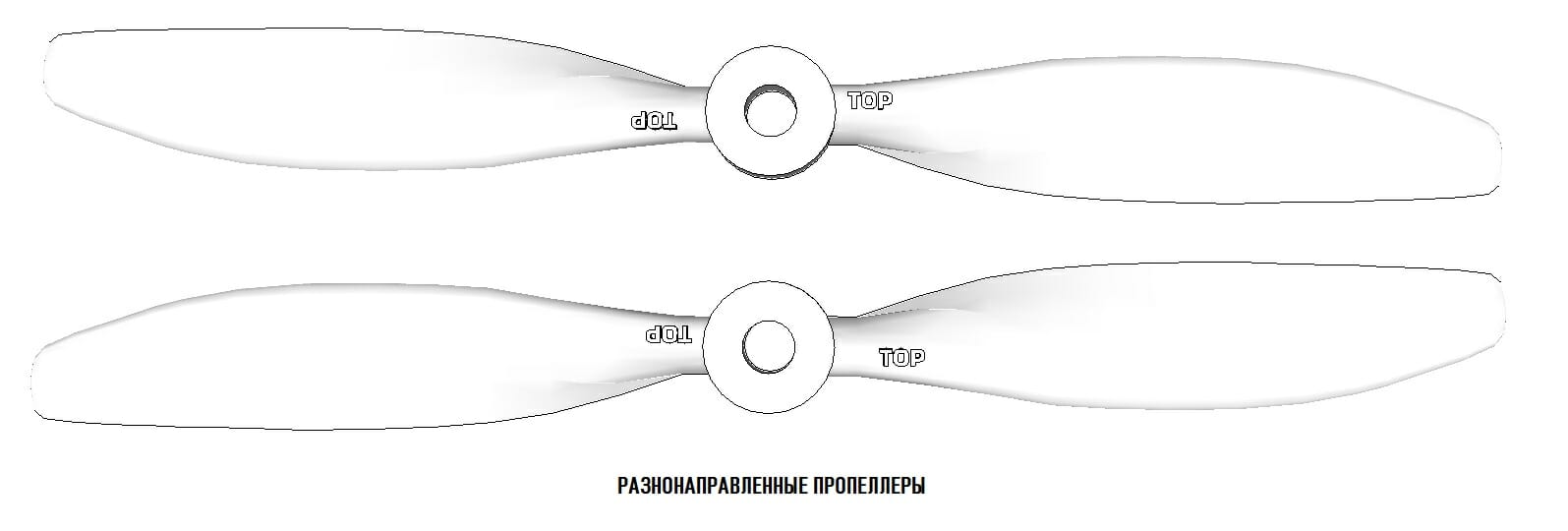
Putaran
Rotor direka untuk putaran mengikut arah jam (CW), atau berlawanan arah jarum jam (CCW). Arah putaran ditunjukkan oleh kecenderungan bilah ( melihat baling-baling dari hujung pantatVtailY6X8
Bahan pelaksanaan
Bahan yang digunakan untuk pembuatan rotor (baling-baling) mungkin memberi kesan sederhana pada penerbangan prestasi tetapi keselamatan harus menjadi keutamaan, terutama jika anda seorang pemula dan tidak berpengalaman.
- Plastik (ABS / Nilon, dll.) adalah pilihan paling popular ketika menggunakan UAV berbilang mesin. Ini sebahagian besarnya disebabkan oleh kos rendah, ciri penerbangan yang baik dan ketahanan eksponensial. Biasanya, sekiranya berlaku kemalangan, sekurang-kurangnya satu baling-baling patah, dan semasa anda menguasai drone dan belajar terbang, anda akan selalu mempunyai banyak alat peraga yang rosak. Kekakuan dan ketahanan hentakan skru plastik dapat ditingkatkan dengan memperkuat dengan serat karbon (karbon), pendekatan ini adalah maks. berkesan dan tidak begitu mahal berbanding dengan baling-baling serat karbon yang lengkap.
- Polimer bertetulang gentian (serat karbon, nilon yang diperkuat dengan karbon, dll.) - adalah teknologi "maju" dalam banyak hubungan. Bahagian serat karbon masih tidak mudah dibuat, dan oleh itu anda membayar lebih banyak daripada skru plastik biasa dengan parameter yang serupa. Baling-baling yang terbuat dari serat karbon lebih sukar dipatahkan atau dibengkokkan, dan oleh itu, jika terhempas, ia akan merosakkan lebih banyak apa pun yang disentuhnya. Pada masa yang sama, baling-baling karbon umumnya dibuat dengan baik, lebih kaku (memberikan kecekapan kehilangan minimum), jarang memerlukan pengimbangan, dan beratnya lebih ringan daripada bahan lain. Sebaiknya pertimbangkan baling-baling tersebut hanya setelah tahap penggunaan pengguna menjadi selesa.
- Kayu adalah bahan yang jarang digunakan untuk pengeluaran rotor UAV multi-rotor, kerana pembuatannya memerlukan pemprosesan mekanikal, yang kemudian menjadikan baling-baling kayu lebih mahal daripada plastik. Pada masa yang sama, pokok itu cukup kuat dan tidak pernah membengkok. Perhatikan bahawa baling-baling kayu masih digunakan dalam pesawat yang dikendalikan radio.



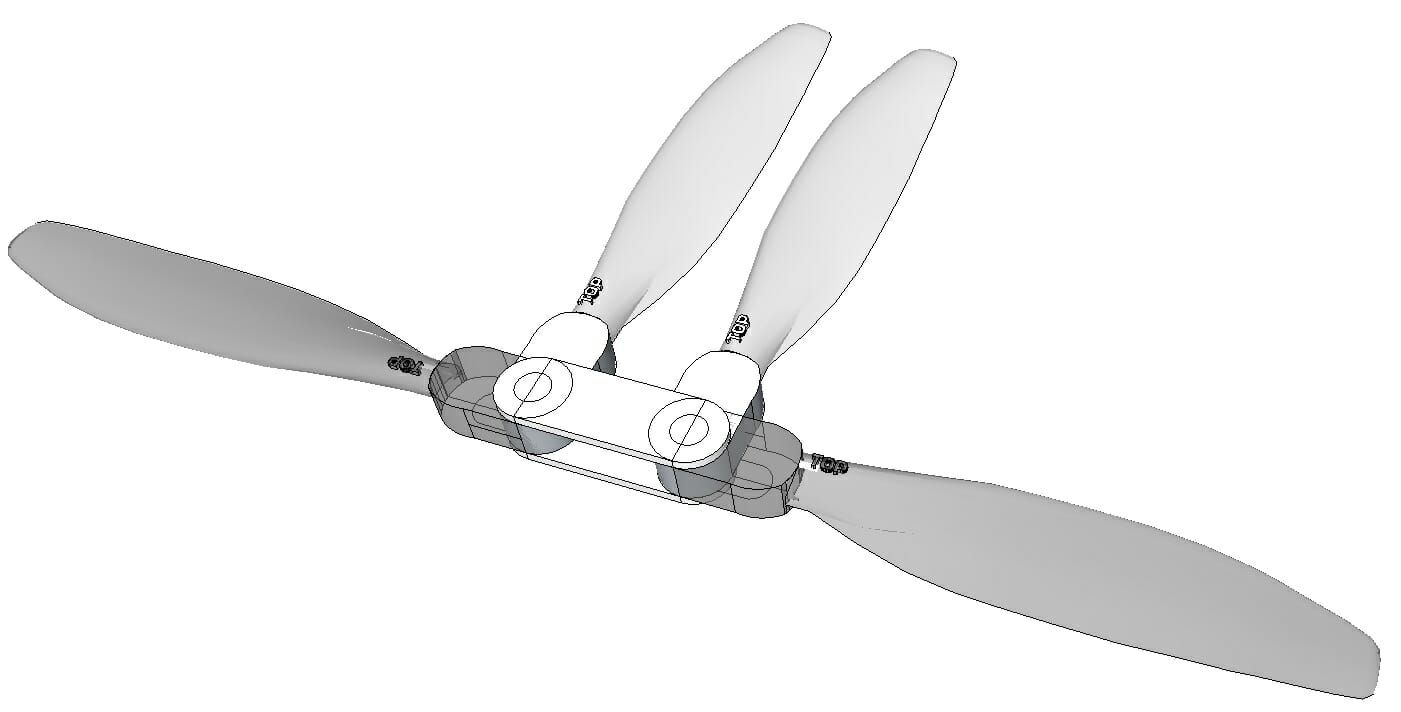
Dilipat
Alat peraga dilipat mempunyai bahagian tengah yang menghubungkan ke dua bilah putar. Apabila pusat (yang disambungkan ke poros keluaran motor) berputar, daya sentrifugal bertindak pada bilah, mendorongnya ke luar dan pada dasarnya menjadikan baling-baling "kaku," dengan kesan yang sama dengan baling-baling bukan lipat klasik. Oleh kerana permintaan rendah dan sebilangan besar bahagian yang diperlukan, baling-baling lipat jarang berlaku. Kelebihan utama alat peraga lipat adalah kekompakan, dan dalam kombinasi dengan bingkai lipat, dimensi pengangkutan drone dapat jauh lebih kecil daripada dimensi penerbangan. Kelebihan bersamaan dari mekanisme lipatan adalah ketiadaan keperluan, jika berlaku kecelakaan, untuk mengubah baling-baling sepenuhnya, cukup untuk mengganti bilah yang rosak sahaja.
Pemasangan
Seperti UAV, rotor boleh mempunyai pelbagai ukuran. Oleh itu, terdapat sejumlah diameter aci motor "standard" di industri ini. Dalam hubungan ini, rotor utama sering dibekalkan dengan sekumpulan kecil cincin penyesuai (mereka kelihatan seperti mesin basuh dengan lubang berlainan diameter di tengahnya), yang dipasang di lubang tengah penyangga
Skru boleh dipasang pada motor berdasarkan kaedah pemasangan yang disokong oleh motor anda. Sekiranya poros motor tidak menyiratkan pilihan pengancing (sambungan berulir, pelbagai alat pengancing, dll.), Maka penyesuai khas digunakan, seperti alat peraga dan penjepit collet.
- Propsaver
- Collet chuck
Motor tanpa sikat dengan rotor luar (jenis "Outrunner"), sebagai peraturan, di bahagian atasnya, memiliki beberapa lubang beruliradalah pilihan yang sama popular untuk memasang baling-baling ke batang motor BC
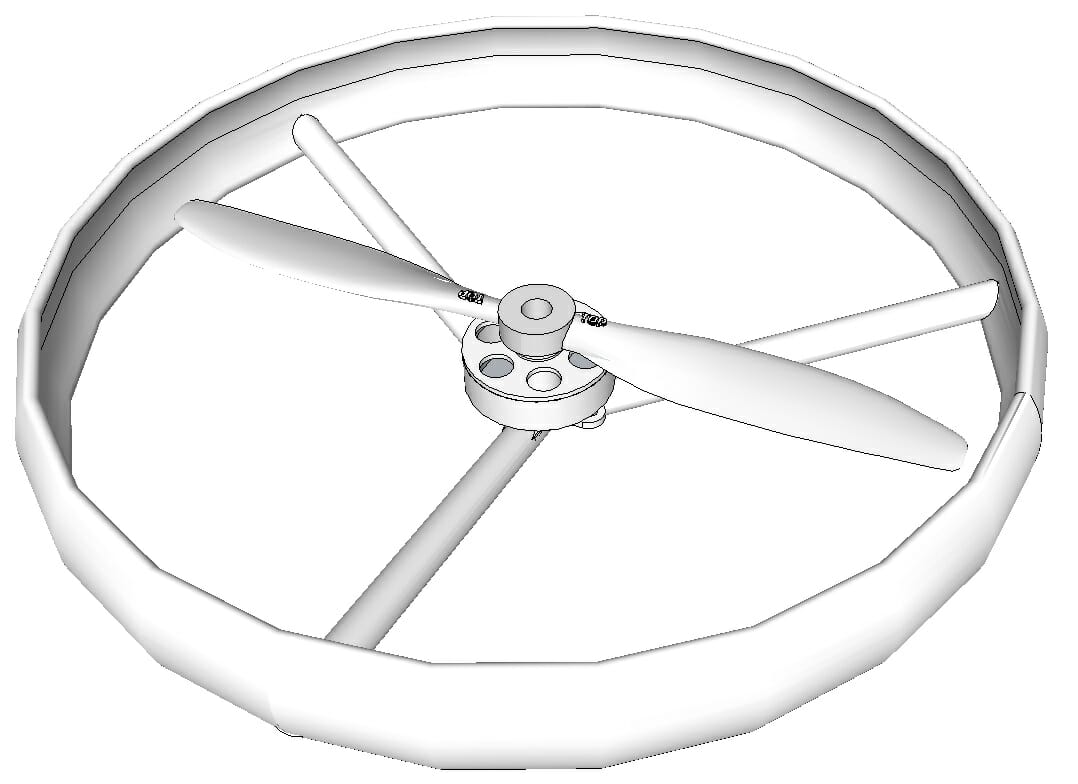
Perlindungan rotor
Perlindungan rotor - dirancang untuk mengecualikan hubungan langsung loji kuasa UAV dengan objek yang akan datang, dengan demikian memelihara integriti dan kebolehoperasiannya, serta untuk mengelakkan kecederaan o baling-baling berputar dengan cepat akibat perlanggaran dengan manusia dan haiwan. Pelindung baling-baling dilekatkan pada bingkai utama. Bergantung pada versi, ia boleh bertindih sebahagian dari kawasan kerja loji kuasa, atau sepenuhnya (perlindungan cincin). Perlindungan baling-baling paling sering digunakan pada UAV kecil (mainan). Penggunaan elemen pelindung dalam pemasangan juga membawa sejumlah kompromi, termasuk:
- Boleh menyebabkan getaran berlebihan.
- Secara amnya menahan hembusan cahaya.
- Boleh mengurangkan daya tuju jika kaki pemasangan terlalu banyak diletakkan di bawah baling-baling.
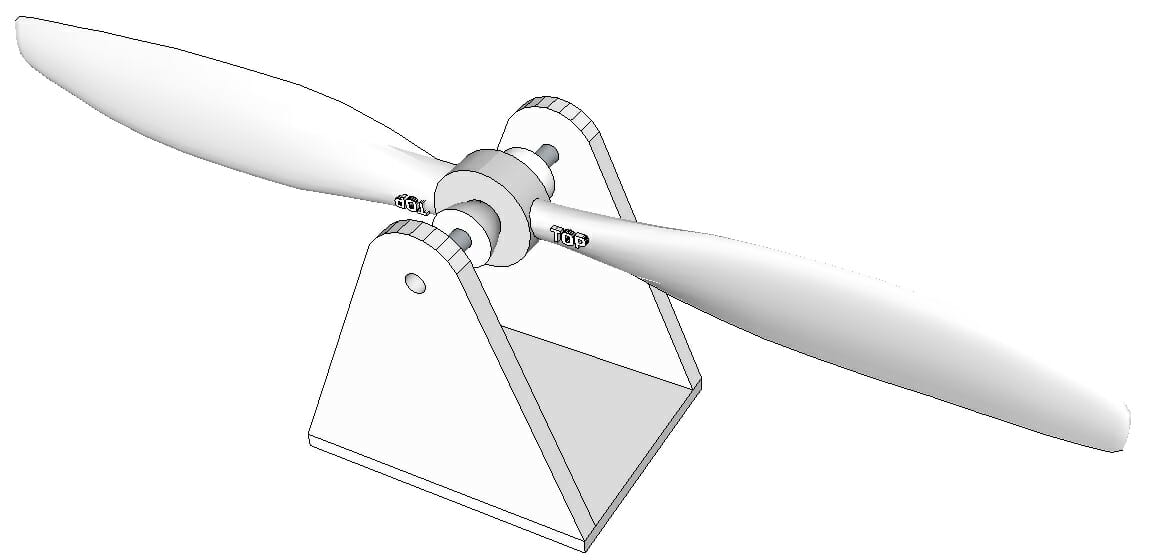
Pengimbangan
Pengimbangan yang buruk berlaku pada baling-baling yang paling murah. Untuk memastikannya, anda tidak perlu pergi jauh, cukup masukkan pensil ke lubang tengah skru (sebagai peraturan, dengan ketidakseimbangan, satu sisi akan lebih berat daripada yang lain). Oleh itu, sangat disarankan untuk mengimbangkan alat peraga anda sebelum memasangnya pada motor. Baling-baling yang tidak seimbang akan menyebabkan getaran berlebihan, yang pada gilirannya memberi kesan negatif terhadap prestasi pengendali penerbangan (ditunjukkan dalam tingkah laku drone yang salah semasa penerbangan), belum lagi peningkatan kebisingan, peningkatan keausan unsur-unsur loji kuasa, dan kemerosotan kualiti merakam kamera yang digantung.
Baling-baling dapat diimbangi dengan cara yang berbeda, tetapi jika Anda membangun drone dari awal, maka di gudang alat harus ada pengimbang baling-baling yang murah yang membolehkan anda dengan mudah dan mudah menentukan ketidakseimbangan berat badan pada baling-baling. Untuk menyamakan berat badan, anda boleh mengisar bahagian prop yang paling berat (bahagian tengah bilah diampelas secara merata, dan tidak boleh memotong bahagian baling-baling), anda juga boleh mengimbangkan dengan menempelkan selotip (nipis) pada bilah yang lebih ringan (tambahkan segmen secara merata sehingga keseimbangan tercapai). Perhatikan bahawa semakin jauh dari pusat anda membuat peningkatan keseimbangan (mengamplas atau menambahkan tali pinggang) baling-baling, semakin besar kesannya berdasarkan prinsip torsi.
3. ESC
ESC (Pengawal Kelajuan Elektronik Inggeris; rus.pengawal kelajuan elektronik) - membolehkan pengawal penerbangan mengawal kelajuan dan arah motor. Dengan voltan yang betul, ESC mesti dapat menahan maksimum. arus yang boleh dimakan oleh motor, dan juga menghadkan arus yang melalui fasa semasa beralih. Sebilangan besar ESC hobi drone hanya membenarkan motor berputar ke satu arah, namun dengan firmware yang betul mereka dapat beroperasi di kedua arah.
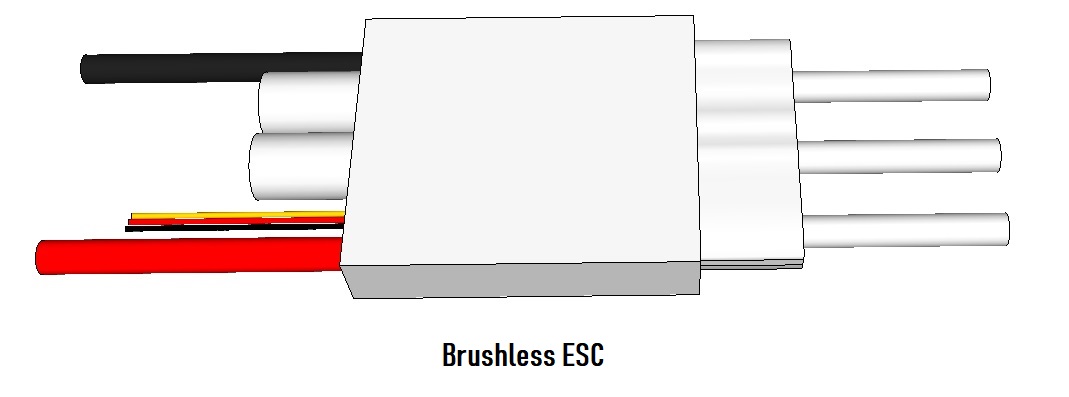
Sambungan
Pada mulanya, ESC boleh membingungkan kerana terdapat beberapa wayar / pin / penyambung yang tersedia untuk menghubungkannya. sisi (ESC boleh datang dengan atau tanpa penyambung yang dipateri).
- Bekalan Kuasa: Dua wayar tebal (biasanya hitam dan merah) disediakan untuk membekalkan kuasa dari papan pengedaran / abah-abah yang mana kuasa datang terus dari bateri utama pesawat.
- 3 penyambung: Tiga penyambung boleh didapati di bahagian bertentangan pengawal untuk menyambung ke tiga penyambung peluru (biasanya dibekalkan dengan motor) pada motor tanpa berus. Penggunaan penyambung semasa menyambungkan ESC memungkinkan, jika perlu (sekiranya berlaku kegagalan), dengan cepat menukar pengawal tanpa menggunakan besi pematerian. Ia berlaku bahawa penyambung berbentuk peluru yang disertakan dengan motor tidak sesuai dengan penyambung pada pengatur, dalam hal ini, gantilah dengan yang sesuai. Yang mana antara tiga adalah "tambah" dan yang mana "tolak"? Titik rujukan adalah wayar positif yang mudah datang dari bateri, menjadi positif pada ESC, sama dengan minus.
- Penyambung servo 3-pin R / C dengan wayar tipis: di mana isyarat yang datang dari penerima diproses, yang mana satu wayar adalah isyarat (penghantaran isyarat gas ke ESC atau input), "Minus" kedua (atau ground), dan wayar positif (tidak digunakan jika tidak ada BEC bawaan; dengan BEC bawaan, itu adalah output daya 5V, yang kemudian dapat digunakan untuk menyalakan elektronik dalam pesawat).
BEC
Pada awal pemodelan pesawat, mesin pembakaran dalaman digunakan sebagai pembangkit tenaga, dan elektronik onboard dikuasakan oleh kecil bateri. Dengan munculnya daya tarikan dan pengawal elektrik (ESC), yang terakhir, mereka mula memasukkan litar penghapusan bateri yang disebut - BEC (dalam bahasa Inggeris. Litar Eliminator Bateri; atau penukar kuasa di atas kapal; sebagai peraturan, ia menyediakan sumber arus tambahan dengan voltan 5V pada arus 1A, atau lebih tinggi). Dengan kata lain, ia adalah penukar voltan yang digunakan dalam pemasangan LiPo menjadi voltan untuk menghidupkan elektronik on-line drone.
Ketika memasang multirotor, semua ESC mesti disambungkan ke pengawal penerbangan, tetapi hanya diperlukan satu BEC, jika tidak, masalah mungkin timbul ketika menghidupkan saluran yang sama. Oleh kerana biasanya tidak ada cara untuk mematikan BEC pada ESC, lebih baik menanggalkan wayar merah () dan membungkusnya dengan pita elektrik untuk semua kecuali satu ESC. Juga penting untuk meninggalkan wayar hitam (tanah) untuk landasan bersama.
Firmware
Tidak semua ESC di pasaran sama-sama baik untuk aplikasi multi-rotor. Penting untuk difahami bahawa sebelum munculnya UAV berbilang mesin, motor tanpa berus digunakan terutamanya sebagai loji tenaga untuk kereta, pesawat terbang dan helikopter yang dikendalikan oleh radio. Sebilangan besar tidak memerlukan masa atau kemas kini tindak balas yang cepat. ESC dengan perisian SimonK atau BLHeli yang tersemat mampu bertindak balas dengan cepat terhadap perubahan yang masuk, yang pada amnya membuat perbezaan antara penerbangan atau kemalangan yang stabil.
Pembahagian Kuasa
Oleh kerana setiap ESC dikuasakan oleh bateri utama, penyambung bateri utama entah bagaimana mesti dibahagikan kepada empat ESC. Ini dilakukan dengan menggunakan Papan Pengagihan KuasaHarness Pengagihan KuasaDekan
4. Bateri
Kimia
Bateri yang digunakan dalam kenderaan udara tanpa pemandu pada masa ini secara eksklusif polimer litium (LiPo), dan komposisi beberapa di antaranya cukup eksotik - litium mangan atau litium lain varian. Asid plumbum tidak sesuai dan NiMh / NiCd masih terlalu berat untuk kapasitinya dan selalunya tidak dapat memberikan kadar pembuangan tinggi yang diperlukan. LiPo menawarkan prestasi dan kadar pelepasan yang tinggi sambil ringan. Kelemahannya adalah masalah keselamatan dan keselamatan yang berterusan (bahaya kebakaran).
Voltan
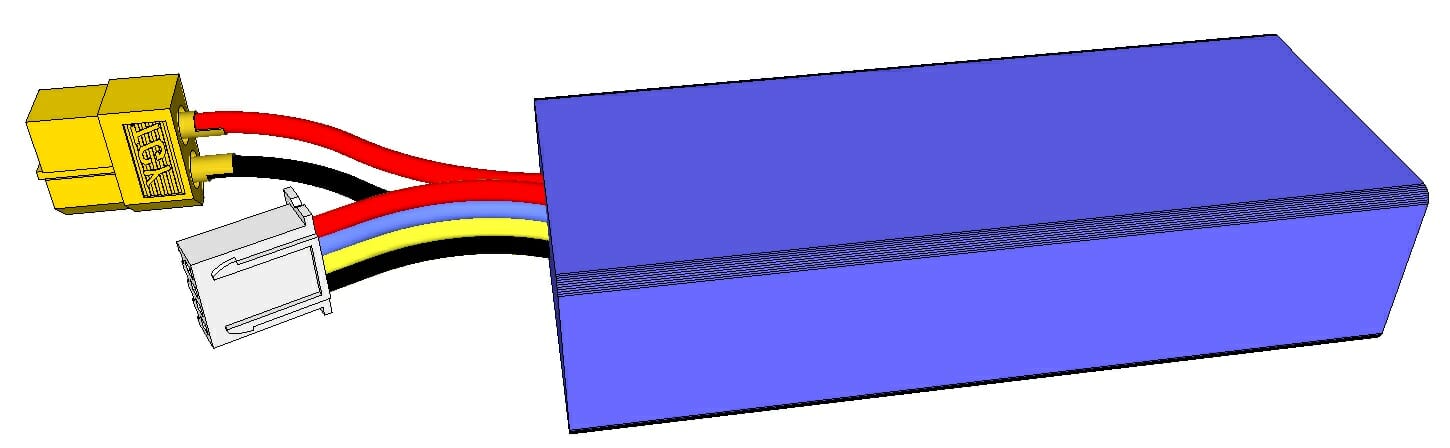
Dalam praktiknya, anda hanya memerlukan satu bateri untuk UAV anda. Voltan bateri ini mesti sepadan dengan motor BK yang telah anda pilih. Hampir semua bateri yang digunakan hari ini didasarkan pada litium dan mengandungi beberapa sel (tin) masing-masing 3.7V, di mana 3.7V = 1S (iaitu bateri satu tin; 2S adalah dua tin, dll.). Oleh itu, bateri berlabel 4S kemungkinan mempunyai nilai nominal 4 × 3.7V = 14.8V. Juga, bilangan tin akan membantu anda menentukan pengecas yang akan digunakan. Perhatikan bahawa bateri sel tunggal berkapasiti tinggi mungkin secara fizikal kelihatan seperti bateri pelbagai sel berkapasiti rendah.
Kapasiti
Kapasiti bateri diukur dalam ampere-jam (Ah). Bateri kecil boleh mempunyai kapasiti 0.1Ah (100mAh), kapasiti bateri untuk drone bersaiz sederhana dapat berkisar antara 2-3Ah (2000mAh - 3000mAh). Semakin tinggi kapasiti, semakin lama masa penerbangan, dan, dengan itu, semakin berat baterinya. Waktu penerbangan UAV konvensional boleh berada dalam jarak 10-20 minit, yang mungkin kelihatan tidak lama, tetapi anda harus memahami bahawa drone itu selalu bergelut dengan graviti semasa penerbangan, dan tidak seperti kapal terbang, ia tidak mempunyai permukaan (sayap) yang memberikan bantuan dalam bentuk daya angkat optimum.
Kadar Pelepasan
Laju Baterai Lithium diukur dalam "C" di mana 1C adalah kapasiti bateri (biasanya dalam jam ampere kecuali jika anda mempertimbangkan drone sebesar Telapak Tangan). Kadar pelepasan kebanyakan bateri LiPo sekurang-kurangnya 5C (lima kali ganda kapasiti), tetapi kerana kebanyakan motor yang digunakan dalam UAV berbilang rotor menggunakan banyak arus, bateri mesti dapat habis pada arus yang sangat tinggi, yang biasanya kira-kira 30A atau lebih.
Keselamatan
Baterai LiPo tidak sepenuhnya selamat kerana ia mengandungi gas hidrogen bertekanan dan mempunyai kecenderungan untuk membakar dan / atau meletup ketika apa-apa ada yang tidak kena. Oleh itu, jika anda mempunyai keraguan mengenai kesihatan bateri, jangan sambungkannya ke drone atau bahkan ke pengecas - anggap ia "dinyahaktifkan" dan buang dengan betul. Keterangan menunjukkan bahawa sesuatu yang tidak kena dengan bateri adalah penyok atau bengkak (iaitu kebocoran gas). Semasa mengecas bateri LiPo, lebih baik menggunakan kotak LiPo yang selamat (Peti selamat bateri). Penyimpanan bateri

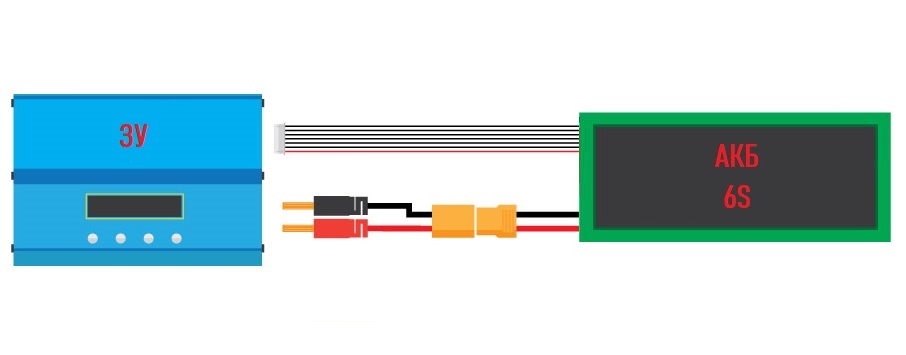
Pengecasan
Sebilangan besar bateri LiPo mempunyai dua penyambungPengecasmasalah keselamatan yang berkaitan dengan bateri polimer litium
.Pemasangan
Bateri adalah elemen drone yang paling berat, jadi harus dipasang di pusat mati pusat untuk memastikan beban yang sama pada motor. Bateri tidak melibatkan pemasangan khas (terutamanya skru mengetuk sendiri yang boleh merosakkan LiPo dan menyebabkan kebakaran), jadi beberapa kaedah pemasangan yang digunakan hari ini meliputi tali Velcro, getah, petak plastik, dan lain-lain. Pilihan pemasangan bateri yang paling biasa adalah menggantung bateri di bawah bingkai menggunakan tali Velcro.







