Indhold
- DIY -drone: Lektion 1. Terminologi.
- Gør-det-selv drone: Lektion 2. Rammer.
- Gør-det-selv drone: Lektion 3. Kraftværk.
- Gør-det-selv drone: Lektion 4. Flyvekontroller.
- Gør-det-selv drone: Lektion 5. Montering.
- Gør-det-selv drone: Lektion 6. Ydelseskontrol.
- Gør-det-selv drone: Lektion 7. FPV og afstand.
- Drone med egne hænder: Lektion 8. Fly.
Introduktion
Nu hvor du har valgt eller bygget en ramme, er det næste trin at vælge det korrekte drivaggregat. Da de fleste af de eksisterende droner er elektriske, vil vi fokusere på at generere rent elektrisk fremdrift gennem børsteløse DC -motorer. Kraftværket omfatter motorer, rotorer (propeller, forkortede rekvisitter), ESC og et opbevaringsbatteri.
1. Motor
Af hvilke motorer du bruger i din samling, vil det afhænge af, hvilken maksimal belastning dronen kan løfte, samt hvor lang tid den kan være under flyvning. Kraftværket skal nødvendigvis bestå af motorer af samme mærke og model, denne tilgang vil give det en afbalanceret drift. Det skal bemærkes, at selv absolut identiske (mærke / model) motorer kan have en lille forskel i hastighed, som efterfølgende nivelleres af flyvekontrolleren.
Børstet vs Børsteløs
I børstede motorer roterer sårrotoren inde i statoren, hvorpå magneterne er stift fastgjort. I børsteløse motorer er alt på tur; viklingen fastgøres stift til indersiden af statoren, og magneterne er monteret på akslen og roterer. I de fleste tilfælde vil du kun overveje børsteløse DC -motorer (BC). Motorer af denne type er meget udbredt i amatørradioindustrien til at samle produkter lige fra helikoptere og fly til drivsystemer i biler og både.
Pandekagebørsteløse motorer er større i diameter, fladere og har generelt et højt drejningsmoment og lavere KV (detaljer nedenfor). Små UAV'er (normalt håndfladestørrelse) bruger ofte små børstede motorer på grund af deres lavere omkostninger og enkle totrådede controller. Mens børsteløse motorer findes i forskellige størrelser og specifikationer, betyder det ikke, at det bliver billigere at vælge en mindre størrelse.

Inrunner vs Outrunner
Der er flere typer børsteløse DC -motorer:
- Inrunner er en indre rotor. Opviklingen er fastgjort til statoren, magneterne er monteret på rotorakslen, som roterer (bruges normalt på RC både, helikoptere og biler på grund af den høje KV).
- Outrunner - ydre rotor. Magneterne er fastgjort til en stator, der roterer omkring en stationær vikling. Bunden af motoren er fastgjort.(motorer af denne type har som regel mere drejningsmoment).
- Hybrid Outrunner - Dette er teknisk set en "Outrunner", men implementeret i en "Inrunner" -pakke. Denne fremgangsmåde gjorde det muligt i én type at kombinere drejningsmomentet "Outrunner" og fraværet af eksterne roterende elementer som i motorer af "Inrunner" -typen.
KV
KV -rating - maks. antallet af omdrejninger, motoren kan udvikle uden tab af effekt ved en given spænding. For de fleste multi-rotor UAV'er er en lav KV-værdi (f.eks. Fra 500 til 1000) relevant, da dette er med til at sikre stabilitet. Mens for akrobatisk flyvning vil en KV -værdi mellem 1000 og 1500 være relevant, i takt med rotorer med mindre diameter (propeller). Lad os sige, at KV -værdien for en bestemt motor er 650 omdr./min., Så vil motoren ved en spænding på 11,1V rotere med en hastighed på: 11,1 × 650 = 7215 omdr./min., Og hvis du bruger motoren ved en lavere spænding (siger 7,4V), vil rotationshastigheden være: 7,4 × 650 = 4810 omdr./min. Det er imidlertid vigtigt at bemærke, at brug af lav spænding generelt betyder højere strømforbrug (strøm = strøm × spænding).
Stød
Nogle producenter af børsteløse motorer kan i specifikationen specificere oplysninger om den maksimalt mulige tryk (stød) genereret af motoren i forbindelse med den anbefalede hovedrotor. Måleenheden for tryk er normalt kilogram (Kg / Kg), pund (Lbs) eller Newton (N). For eksempel, hvis du bygger en quadrocopter, og du kender trykværdien af en enkelt motor = op til 0,5 kg i et rum med en 11-tommer rotor, så kan fire sådanne motorer ved udgangen løftes ved maksimal tryk: 0,5 kg × 4 = 2 kg. Hvis den samlede vægt af din quadcopter derfor er lidt mindre end 2 kg, vil den med et sådant kraftværk kun starte ved maksimalt omdrejningstal (maks. Tryk). I dette tilfælde vil det være relevant enten at vælge et mere kraftfuldt rotormotorbundt, som vil give mere tryk, eller for at reducere dronens samlede vægt. Ved max. kraftværket = 2 kg, bør dronens vægt ikke være mere end halvdelen af denne værdi (1 kg, inklusive selve motorens vægt). En lignende beregning kan foretages for enhver konfiguration. Antag, at vægten af hexakopteren (inklusive ramme, motorer, elektronik, tilbehør osv.) Er 2,5 kg. Det betyder, at hver motor til en sådan samling skal levere (2,5 kg ÷ 6 motorer) × 2 = 0,83 kg fremdrift (eller mere). Nu ved du, hvordan du beregner det optimale tryk på motorerne baseret på den samlede vægt, men inden du træffer en beslutning, foreslår vi, at du gør dig bekendt med afsnittene herunder.
Yderligere overvejelser
- Stik: DC børstede motorer har to stik "" og "-". Skift af ledninger på steder ændrer motorens rotationsretning.
- Stik: Børsteløse DC -motorer har tre stik. For at finde ud af, hvordan du tilslutter dem, samt hvordan du ændrer rotationsretningen, henvises til afsnittet ESC nedenfor.
- viklinger: viklingerne påvirker motorernes KV. Hvis du har brug for den laveste KV -værdi, men prioriterer drejningsmoment, er det bedst at rette opmærksomheden mod børsteløse DC -motorer af Pancake -typen.
- Montering: De fleste producenter har et generelt ledningsdiagram for jævnstrømsmotorer til jævnstrømsmotorer, som gør det muligt for rammevirksomheder at undgå at lave såkaldte adaptere. Skabelonen er normalt metrisk med to huller 16 mm fra hinanden og yderligere to huller 19 mm fra hinanden (90 ° til den første).
- Gevind: Monteringstråden, der bruges til at fastgøre den børsteløse motor til rammen, kan variere. De sædvanlige metriske størrelser på skruer er M1, M2 og M3, kejserlige størrelser kan være 2-56 og 4-40.
2. Hovedrotorer (propeller)
Hovedrotorer (propeller, forkortede rekvisitter) til multi-rotor UAV'er stammer fra propeller til radiostyrede fly. Mange vil spørge: hvorfor ikke bruge helikopterblade? Selvom dette allerede er gjort, skal du forestille dig dimensionerne af en hexakopter med helikopterblade. Det er også værd at bemærke, at helikoptersystemet kræver en ændring af bladernes stigning, og dette komplicerer designet betydeligt.
Du kan også spørge, hvorfor ikke bruge en turbojetmotor, en turbofanmotor, en turboprop osv.? De er sikkert utroligt gode til at levere en masse kraft, men de kræver også meget energi. Hvis dronens primære bekymring er at bevæge sig meget hurtigt frem for at svæve i et begrænset rum, kan en af de ovennævnte motorer være en god mulighed.
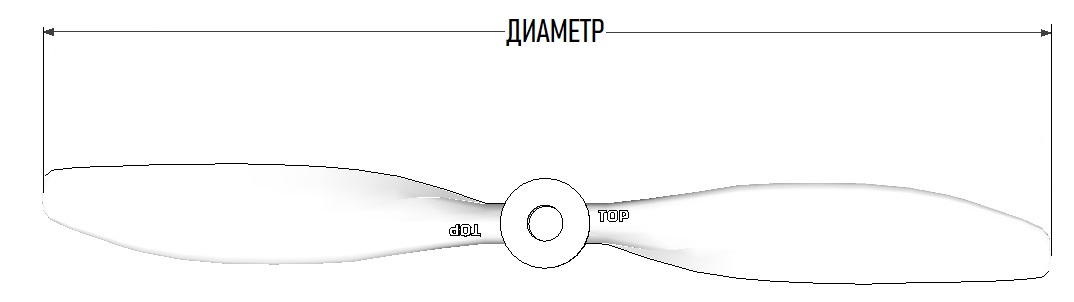
Knive og diameter
Hovedrotoren på de fleste multirotor-UAV'er har to eller tre knive. De mest anvendte propeller er med to blade. Antag ikke, at tilføjelse af flere vinger automatisk øger trykstyrken; hvert blad arbejder i strømmen forstyrret af det forrige blad, hvilket reducerer effektiviteten af propellen. Hovedrotoren med en lille diameter har mindre inerti, og derfor er det lettere at accelerere og bremse, hvilket er vigtigt for akrobatisk flyvning.

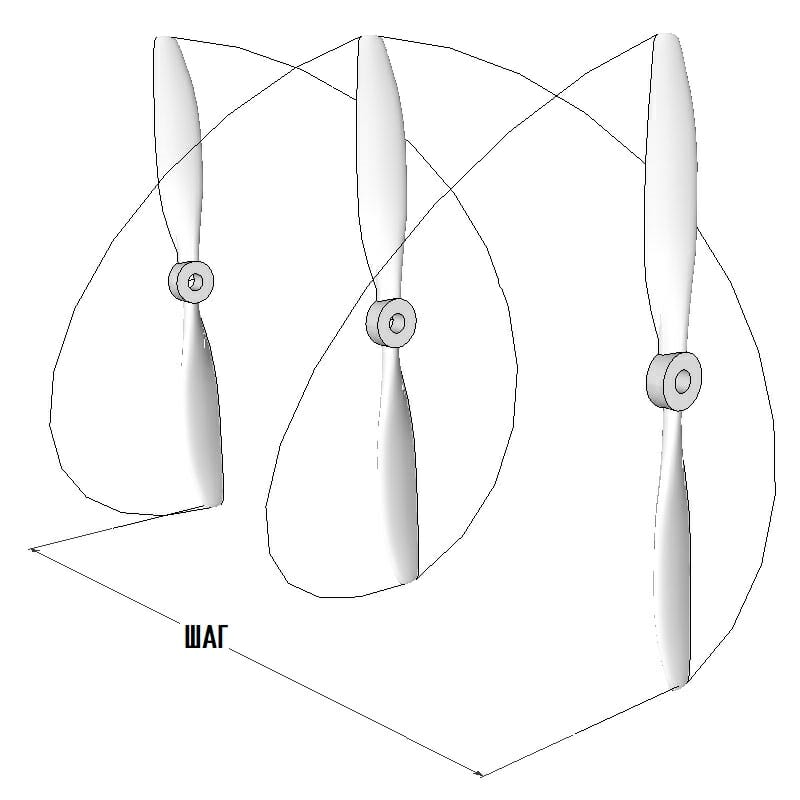
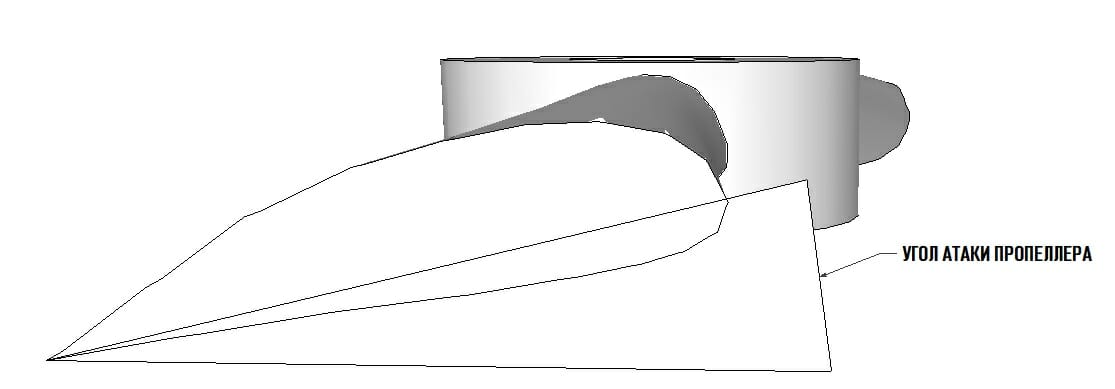
Pitch / Angle Angle / Efficiency / Thrust
Den kraft, der genereres af hovedrotor afhænger af luftens densitet, antallet af omdrejninger af propellen, dens diameter, bladernes form og areal samt dens stigning. En propels effektivitet er relateret til angrebsvinklen, der er defineret som bladets stigning minus spiralvinklen (vinklen mellem den resulterende relative hastighed og bladets rotationsretning). Selve effektiviteten er forholdet mellem udgangseffekt og inputeffekt. De fleste veldesignede propeller er mere end 80% effektive. Angrebsvinklen påvirkes af den relative hastighed, så propellen vil have forskellig effektivitet ved forskellige motorhastigheder. Effektiviteten påvirkes også stærkt af hovedrotorbladets forkant, og det er meget vigtigt, at det er så glat som muligt. Selvom et design med variabel stigning ville være bedst, betyder den ekstra kompleksitet, der kræves i forhold til multirotors iboende enkelhed, at en propel med variabel stigning næsten aldrig bruges.
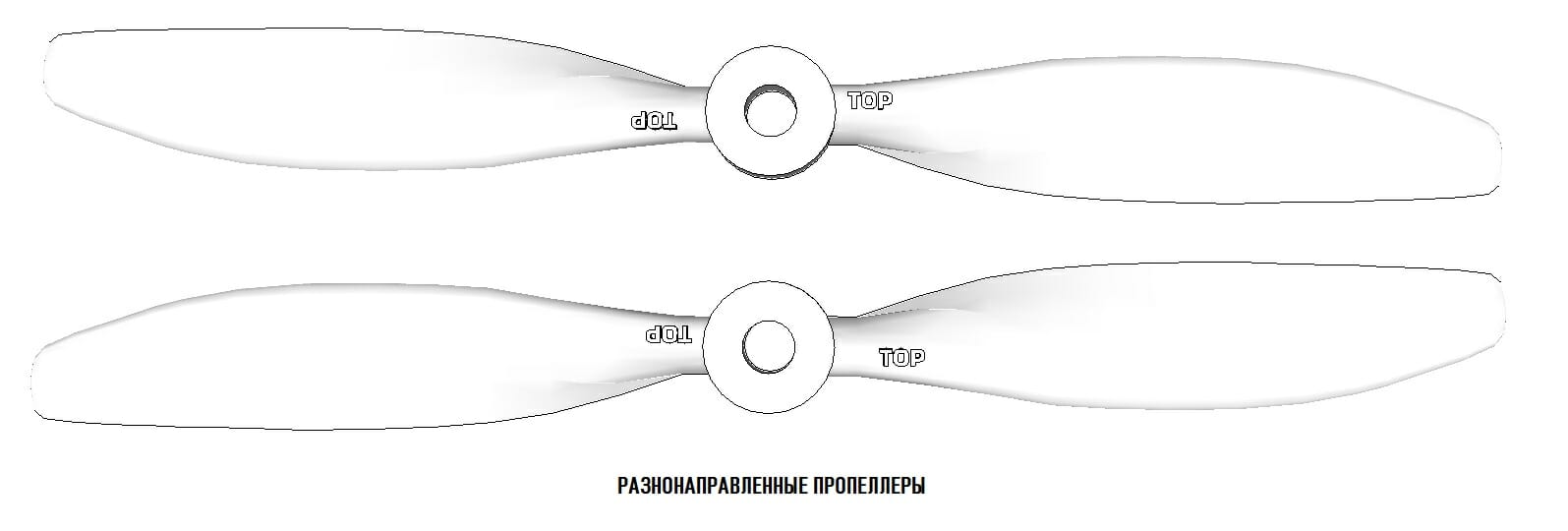
Rotation
Rotorerne er designet til rotation med uret (CW) eller mod uret (CCW). Rotationsretningen er angivet ved klingens hældning ( kig på propellen fra bagendenVtailY6X8
Materialer til udførelse
Materialer, der anvendes til fremstilling af rotorer (propeller) kan have en moderat effekt på flyvningen ydeevne, men sikkerhed bør have højeste prioritet, især hvis du er nybegynder og uerfaren.
- Plastik (ABS / Nylon osv.) er det mest populære valg, når det kommer til multi-motor UAV'er. Dette skyldes i høj grad de lave omkostninger, anstændige flyveegenskaber og eksponentiel holdbarhed. Typisk, i tilfælde af et nedbrud, er mindst en propel gået i stykker, og mens du mestrer dronen og lærer at flyve, vil du altid have en masse ødelagte rekvisitter. Stivheden og slagfastheden af plastskruen kan forbedres ved at forstærke med kulfiber (kulstof), denne tilgang er max. effektiv og ikke så dyr i forhold til en fuldgyldig og kulfiber propel.
- Fiberforstærket polymer (kulfiber, kulforstærket nylon osv.) -er den "avancerede" teknologi i mange forhold. Kulfiberdele er stadig ikke særlig lette at fremstille, og derfor betaler du mere for dem end for en almindelig plastskrue med lignende parametre. En propel af kulfiber er sværere at bryde eller bøje, og derfor vil den, hvis den går ned, gøre mere skade på alt, hvad den kommer i kontakt med. På samme tid er kulstofpropeller generelt godt lavet, stivere (giver minimalt effektivitetstab), har sjældent brug for balancering og er lettere i vægt end noget andet materiale. Det anbefales først at overveje sådanne propeller, efter at brugerens piloteniveau er blevet behageligt.
- Træ er et sjældent brugt materiale til fremstilling af multi-rotor UAV-rotorer, da deres fremstilling kræver mekanisk bearbejdning, hvilket senere gør træpropeller dyrere end plastik. På samme tid er træet ret stærkt og bøjer aldrig. Bemærk, at træpropeller stadig bruges i radiostyrede fly.



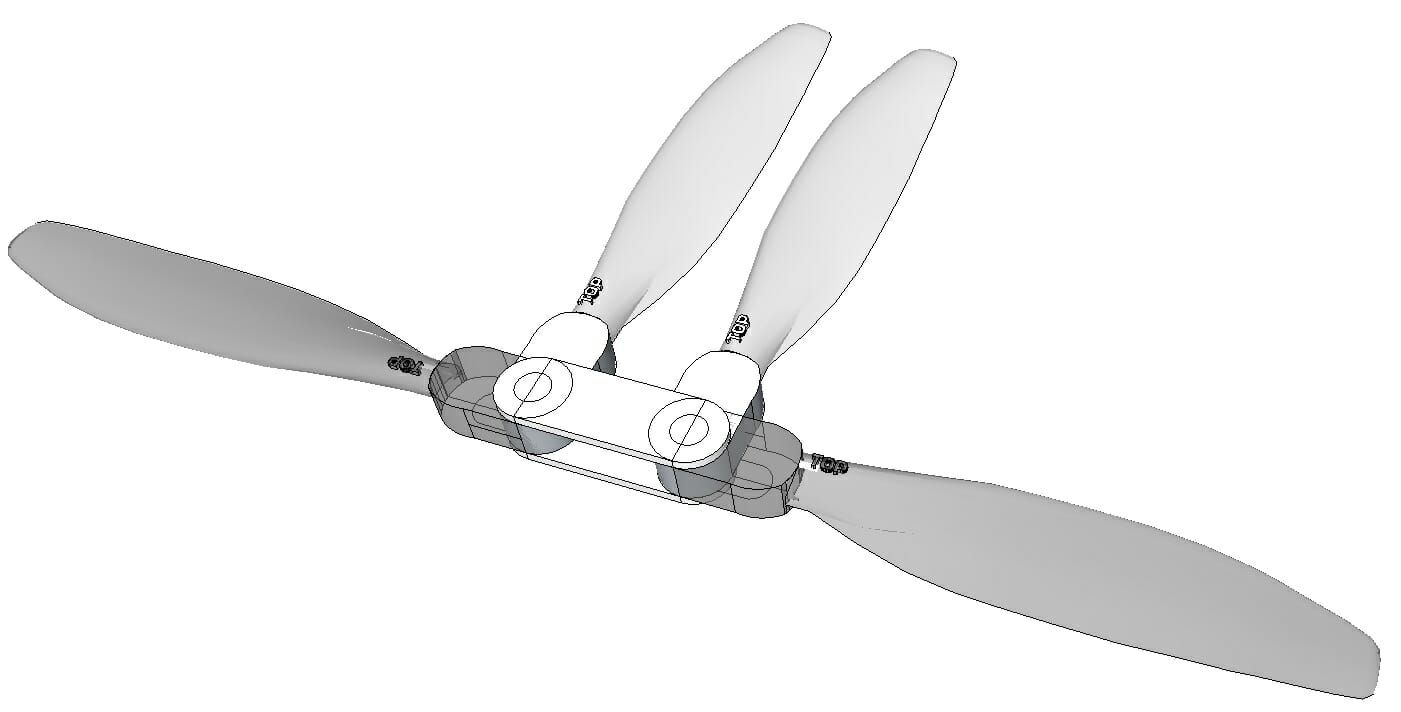
Sammenklappelig
Foldbare rekvisitter har en central del, der kan forbindes til to drejelige klinger. Når midten (som er forbundet til motorens udgangsaksel) roterer, virker centrifugalkræfter på bladene, der skubber dem udad og i det væsentlige gør propellen "stiv" med samme effekt som en klassisk ikke-foldbar propel. På grund af lav efterspørgsel og et stort antal nødvendige dele er foldepropeller mindre almindelige. Den største fordel ved foldestøtter er kompakthed, og i kombination med en foldestel kan dronens transportdimensioner være betydeligt mindre end flyvedimensioner. En ledsagende fordel ved foldemekanismen er fraværet af behovet for i tilfælde af et nedbrud at ændre propellen helt, det vil være nok at udskifte kun det beskadigede blad.
Installation
Ligesom UAV'er kan rotorer have en lang række størrelser. Der er således en række "standard" motorakseldiametre i branchen. I denne forbindelse forsynes hovedrotoren ofte med et lille sæt adapterringe (de ligner skiver med huller med forskellige diametre i midten), som er installeret i centerboringen af støtten
Skruen kan fastgøres til motoren baseret på hvilken monteringsmetode der understøttes af din motor. Hvis motorakslen ikke indebærer nogen fastgørelsesmuligheder (gevindtilslutning, forskellige fastgørelsesanordninger osv.), Bruges specielle adaptere, såsom propsavers og spændespænder.
- Propsaver
- Spændepatron
Børsteløse motorer med en ydre rotor (type "Outrunner") har som regel i den øverste del af den flere gevindhullerer en lige så populær mulighed for at fastgøre propellen til BC-motorakslen
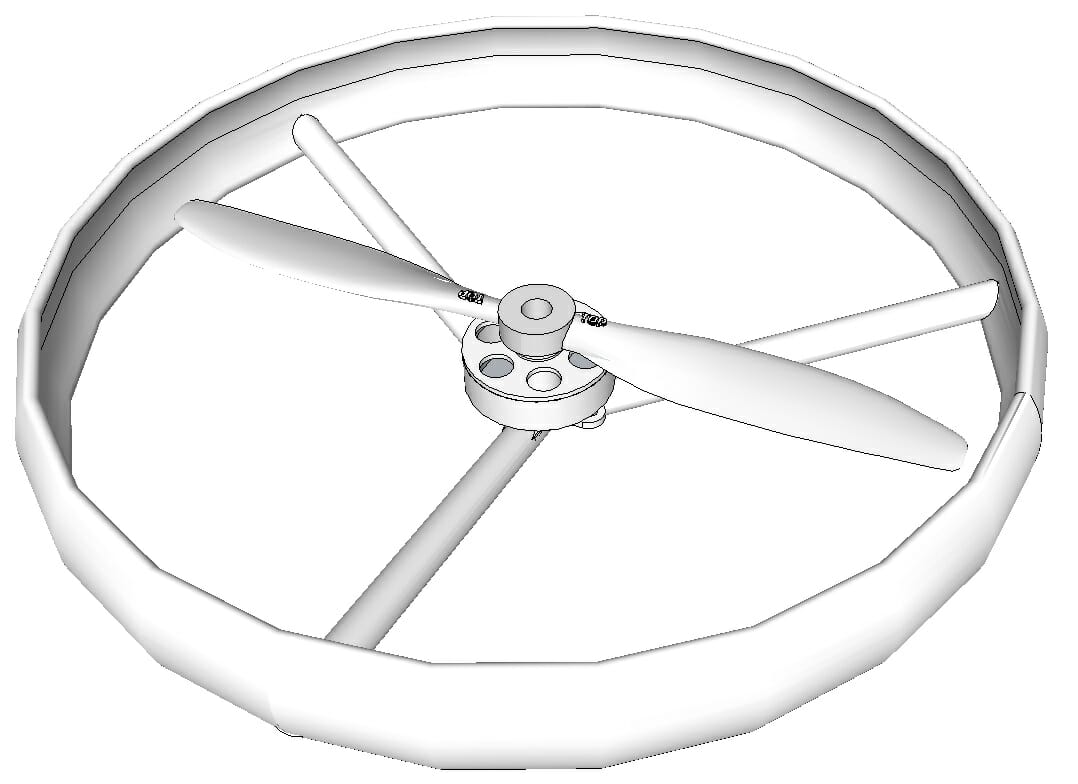
Beskyttelse af rotorer
Beskyttelse af rotorer - designet til at udelukke direkte kontakt mellem UAVs kraftværk og et modkørende objekt, hvorved dets integritet og funktionalitet bevares, samt for at forhindre skader o hurtigt roterende propeller som følge af kollisioner med mennesker og dyr. Skruerne er fastgjort til hovedrammen. Afhængigt af versionen kan den enten delvis overlappe arbejdsområdet på kraftværket eller helt (ringbeskyttelse). Propellbeskyttelse bruges oftest på små (legetøj) UAV'er. Brugen af beskyttelseselementer i samlingen medfører også en række kompromiser, herunder:
- Kan forårsage overdreven vibration.
- Modstår generelt lette slag.
- Kan reducere tryk, hvis der placeres for mange monteringsfødder under propellen.
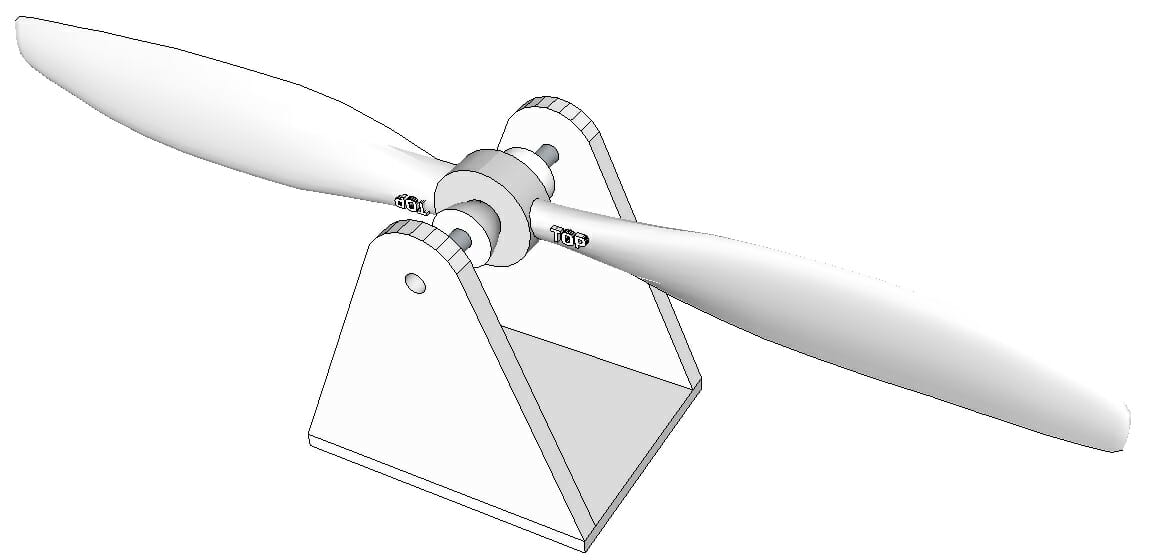
Balancering
Dårlig afbalancering forekommer på de fleste billige propeller. For at sikre dig dette behøver du ikke gå langt, bare sæt en blyant ind i skruens centrale boring (som regel vil den ene side være tungere end den anden med en ubalance). Derfor anbefales det stærkt at afbalancere dine rekvisitter, før du installerer dem på motorerne. En ubalanceret propel vil forårsage overdrevne vibrationer, som igen påvirker flyvekontrollerens ydeevne negativt (manifesteret i forkert opførsel af dronen under flyvning), for ikke at nævne en stigning i støj, øget slid på kraftværkselementerne og en forringelse af kvaliteten af optagelse af et suspenderet kamera.
Propellen kan modbalanceres på forskellige måder, men hvis du bygger en drone fra bunden, skal der i arsenalet af værktøjer være en billig propelbalancer, der giver dig mulighed for let og enkelt at bestemme vægten i propellen. For at udligne vægten kan du enten slibe den tungeste del af rekvisitten (den centrale del af bladet er slebet jævnt og i intet tilfælde afskære propeldelen), du kan også balancere ved at lime et stykke tape (tyndt) på den lettere kniv (tilføj segmenterne jævnt indtil balancen er nået). Bemærk, at jo længere fra midten du foretager en balancerende opgradering (slibning eller tilføjelse af et bælte) af propellen, desto større effekt vil der være baseret på momentet.
3. ESC
ESC (engelsk elektronisk hastighedsregulator; rus.elektronisk hastighedsregulator) - gør det muligt for flyvekontrolleren at styre motorens hastighed og retning. Med den korrekte spænding skal ESC kunne modstå maks. strømmen, som motoren kan forbruge, og begrænser også strømmen, der passerer gennem fasen under skift. De fleste drone hobby ESC'er tillader kun motoren at rotere i en retning, men med den korrekte firmware kan de fungere i begge retninger.
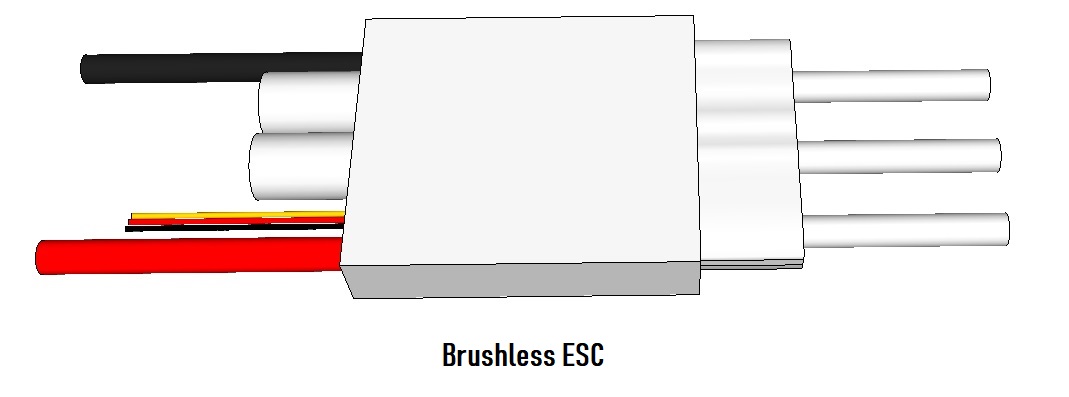
Tilslutning
I første omgang kan ESC være forvirrende, fordi der er flere ledninger / stifter / stik til rådighed for at forbinde det. To sider (ESC kan leveres med eller uden loddede stik).
- Strømforsyning: To tykke ledninger (normalt sorte og røde) leveres til at levere strøm fra fordelerkortet / selen, hvortil der kommer strøm direkte fra flyets hovedbatteri.
- 3 stik: Tre stik findes på den modsatte side af controlleren til tilslutning til tre kuglestik (normalt leveret med motorer) på en børsteløs motor. Anvendelse af stik ved tilslutning af ESC tillader om nødvendigt (i tilfælde af fejl) hurtigt at skifte controller uden at bruge et loddejern. Det sker, at de kugleformede stik, der følger med motoren, ikke matcher konnektorerne på regulatoren, i så fald skal du blot udskifte dem med passende. Hvilken af de tre er "plus", og hvilken er "minus"? Referencepunktet er en enkel, positiv positiv ledning fra batteriet, går i positiv på ESC, tilsvarende med et minus.
- 3-benet R / C servostik med tynde ledninger:, hvorigennem signalet fra modtageren behandles, hvoraf den ene ledning er signal (transmission af gassignalet til ESC eller input), det andet "minus" (eller jord) og en positiv ledning (bruges ikke, hvis der ikke er indbygget BEC; med indbygget BEC er det en 5V effektudgang, som senere kan bruges til strømforsyning indbygget elektronik).
BEC
I de tidlige dage med flymodellering blev en forbrændingsmotor brugt som kraftværk, og elektronikken om bord blev drevet af en lille batteri. Med fremkomsten af elektrisk trækkraft og controllere (ESC), i sidstnævnte, begyndte de at inkludere det såkaldte batterielimineringskredsløb-BEC (på engelsk. Batterieliminatorkredsløb eller indbygget strømomformer; som regel giver det en ekstra strømkilde med en spænding på 5V ved en strøm på 1A eller derover). Med andre ord er det en spændingsomformer, der bruges i samlingen LiPo til en spænding til at drive dronens indbyggede elektronik.
Ved montering af multirotoren skal alle ESC'er tilsluttes flyvekontrolleren, men der kræves kun en BEC, ellers kan der opstå problemer ved strømforsyning af de samme linjer. Da der normalt ikke er nogen måde at deaktivere BEC på en ESC, er det bedst at fjerne den røde ledning () og pakke den ind med elektrisk tape til alle undtagen én ESC. Det er også vigtigt at efterlade den sorte ledning (jord) til fælles jord.
Firmware
Ikke alle ESC'er på markedet er lige gode til multi-rotor applikationer. Det er vigtigt at forstå, at før fremkomsten af flermotorede UAV'er blev børsteløse motorer primært brugt som et kraftværk til radiostyrede biler, fly og helikoptere. De fleste kræver ikke hurtige svartider eller opdateringer. ESC'er med integreret software SimonK eller BLHeli er i stand til at reagere meget hurtigt på indgående ændringer, hvilket generelt gør forskellen mellem stabil flyvning eller styrt.
Strømfordeling
Da hver ESC drives af hovedbatteriet, skal hovedbatteriets stik på en eller anden måde opdeles i fire ESC'er. Dette gøres ved hjælp af Power Distribution BoardPower Distribution HarnessDekaner
4. Batteri
Kemi
Batterier, der bruges i ubemandede luftfartøjer, er i øjeblikket udelukkende lithiumpolymer (LiPo), og sammensætningen af nogle af dem er ret eksotisk - lithiummangan eller andet lithium varianter. Blysyre er simpelthen ikke egnet, og NiMh / NiCd er stadig for tunge til deres kapacitet og kan ofte ikke levere de krævede høje udladningshastigheder. LiPo tilbyder høj ydelse og afladningshastighed med lav vægt. Ulemperne er deres relativt høje omkostninger og konstante sikkerhedsproblemer (brandfare).
Spænding
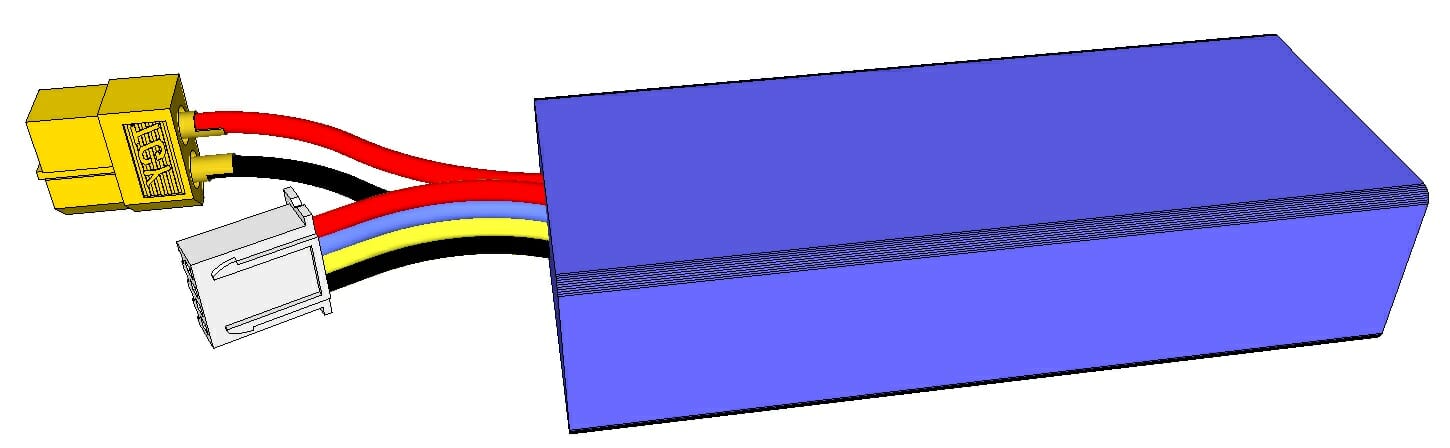
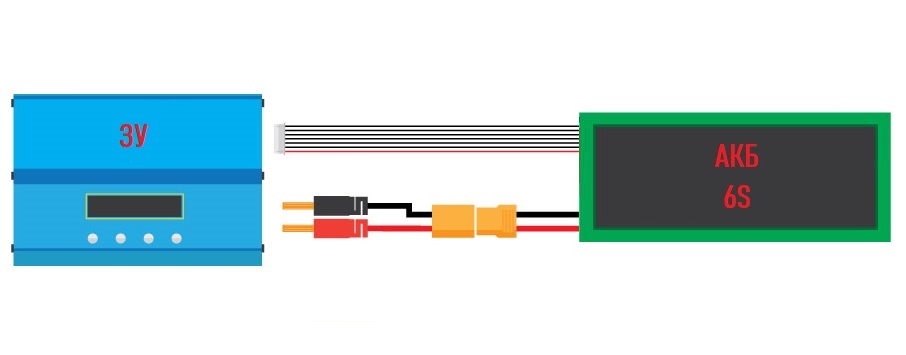
I praksis har du kun brug for ét batteri til din UAV. Spændingen på dette batteri skal matche de BK -motorer, du har valgt. Næsten alle batterier, der bruges i dag, er baseret på lithium og indeholder flere celler (dåser) på 3,7V hver, hvor 3,7V = 1S (dvs. en dåse batteri; 2S er to dåser osv.). Derfor har et batteri mærket 4S sandsynligvis en nominel værdi på 4 × 3,7V = 14,8V. Antallet af dåser hjælper dig også med at bestemme, hvilken oplader du skal bruge. Bemærk, at et enkeltcellet batteri med høj kapacitet fysisk kan ligne et flercellet batteri med lav kapacitet.
Kapacitet
Batterikapacitet måles i ampere-timer (Ah). Små batterier kan have en kapacitet på 0,1Ah (100mAh), batterikapacitet for mellemstore droner kan variere fra 2-3Ah (2000mAh-3000mAh). Jo højere kapacitet, jo længere flyvetid og følgelig jo tungere batteri. Flyvetiden for en konventionel UAV kan være i intervallet 10-20 minutter, hvilket kan virke kortvarigt, men du skal forstå, at dronen konstant kæmper med tyngdekraften under flyvningen, og i modsætning til et fly har den ikke overflader (vinger), der yder assistance i form optimal løftekraft.
Udladningshastighed
Litiumbatteriets afladningshastighed måles i “C”, hvor 1C er batterikapaciteten (normalt i ampere timer, medmindre du overvejer en drone på størrelse med Håndflade). Afladningshastigheden for de fleste LiPo-batterier er mindst 5C (fem gange kapaciteten), men da de fleste motorer, der bruges i multi-rotor UAV'er forbruger meget strøm, skal batteriet kunne aflades med en utrolig høj strøm, hvilket normalt er omkring 30A eller mere.
Sikkerhed
LiPo -batterier er ikke helt sikre, da de indeholder hydrogengas under tryk og har en tendens til at brænde og / eller eksplodere, når noget der er galt. Såfremt du er i tvivl om batteriets helbred, skal du under ingen omstændigheder tilslutte det til dronen eller endda til opladeren - betragte det som "nedlagt" og bortskaf det korrekt. Kendetegnene på, at der er noget galt med batteriet, er buler eller hævelse (dvs. gaslækage). Når du oplader et LiPo -batteri, er det bedst at bruge en pengeskab LiPo -boks (Batteriboks). Batterilagring

Opladning
De fleste LiPo -batterier har to stikOpladerende sikkerhedsproblemer, der er forbundet med lithiumpolymerbatterier
.Montering
Batteriet er det tungeste element i dronen, så det skal installeres i midten af dødpunktet for at sikre samme belastning på motorer. Batteriet indebærer ikke nogen særlig montering (især selvskærende skruer, der kan beskadige LiPo og forårsage brand), så nogle monteringsmetoder, der bruges i dag, inkluderer velcrobånd, gummi, plastrum og andre. Den mest almindelige mulighed for montering af batterier er at hænge batteriet under rammen ved hjælp af en velcrobånd.







