Contenidos
- Dron de bricolaje: Lección 1. Terminología.
- Dron de bricolaje: Lección 2. Marcos.
- Dron de bricolaje: Lección 3. Planta de energía.
- Dron de bricolaje: Lección 4. Controlador de vuelo.
- Dron de bricolaje: Lección 5. Montaje.
- Dron de bricolaje: Lección 6. Comprobación de rendimiento.
- Dron de bricolaje: Lección 7. FPV y distancia.
- Drone con tus propias manos: Lección 8. Aviones.
Introducción
Ahora que ha seleccionado o construido un cuadro, el siguiente paso es seleccionar el tren de potencia correcto. Dado que la mayoría de los drones existentes son eléctricos, nos centraremos en generar propulsión puramente eléctrica a través de motores de CC sin escobillas. La planta de energía incluye motores, rotores (hélices, puntales abreviados), ESC y una batería de almacenamiento.
1. Motor
De los motores que use en su ensamblaje, dependerá de la carga máxima que pueda levantar el dron, así como de cuánto tiempo pueda estar en vuelo. La planta de energía debe consistir necesariamente en motores de la misma marca y modelo, este enfoque le proporcionará un funcionamiento equilibrado. Cabe señalar que incluso los motores absolutamente idénticos (marca / modelo) pueden tener una ligera diferencia en la velocidad, que posteriormente es nivelada por el controlador de vuelo.
Brushed vs Brushless
En los motores Brushed, el rotor bobinado gira dentro del estator en el que los imanes están rígidamente fijados. En los motores sin escobillas, todo gira; el devanado se fija rígidamente al interior del estator y los imanes se montan en el eje y giran. En la mayoría de los casos, solo considerará los motores de CC sin escobillas (BC). Los motores de este tipo se utilizan ampliamente en la industria de los radioaficionados para ensamblar productos que van desde helicópteros y aviones hasta sistemas de propulsión en automóviles y barcos.
Los motores Pancake sin escobillas son de mayor diámetro, más planos y generalmente tienen un par alto y un KV más bajo (detalles a continuación). Los UAV de tamaño pequeño (generalmente del tamaño de la palma de la mano) a menudo usan motores pequeños con escobillas debido a su menor costo y controlador simple de dos cables. Si bien los motores sin escobillas vienen en diferentes tamaños y especificaciones, elegir un tamaño más pequeño no significa que sea más barato.

Inrunner vs Outrunner
Hay varios tipos de motores de CC sin escobillas:
- Inrunner es un rotor interno. El devanado está fijado al estator, los imanes están montados en el eje del rotor, que gira (generalmente se usa en barcos RC, helicópteros y automóviles debido al alto KV).
- Outrunner - rotor exterior. Los imanes están fijados a un estator que gira alrededor de un devanado estacionario. La parte inferior del motor está fija.(por regla general, los motores de este tipo tienen más par).
- Hybrid Outrunner - Esto es técnicamente un "Outrunner", pero implementado en un paquete "Inrunner". Este enfoque hizo posible combinar en un tipo el par "Outrunner" y la ausencia de elementos giratorios externos como en los motores del tipo "Inrunner".
KV
Clasificación de KV - máx. el número de revoluciones que el motor puede desarrollar sin pérdida de potencia a un voltaje dado. Para la mayoría de los vehículos aéreos no tripulados multirrotor, un valor de KV bajo (por ejemplo, de 500 a 1000) es relevante, ya que esto ayuda a garantizar la estabilidad. Mientras que para el vuelo acrobático será relevante un valor de KV entre 1000 y 1500, en tándem con rotores de menor diámetro (hélices). Digamos que el valor de KV para un motor en particular es 650 r / voltio, luego, a un voltaje de 11.1V, el motor girará a una velocidad de: 11.1 × 650 = 7215 rpm, y si usa el motor a un voltaje más bajo (digamos 7,4 V), la velocidad de rotación será: 7,4 × 650 = 4810 rpm. Sin embargo, es importante tener en cuenta que el uso de bajo voltaje generalmente significa un mayor consumo de corriente (potencia = corriente × voltaje).
Empuje
Algunos fabricantes de motores sin escobillas pueden especificar en la información de especificaciones sobre el empuje máximo posible (Empuje) generado por el motor junto con el rotor recomendado. La unidad de medida para el empuje suele ser kilogramo (Kg / Kg), libra (Lbs) o Newton (N). Por ejemplo, si está construyendo un cuadricóptero y conoce el valor de empuje de un solo motor = hasta 0.5 kg en un compartimiento con un rotor de 11 pulgadas, entonces, en la salida, cuatro de estos motores se pueden levantar con el empuje máximo: 0.5 kg × 4 = 2 kg. En consecuencia, si el peso total de su quadcopter es un poco menos de 2 kg, entonces con una planta de energía de este tipo despegará solo a las rpm máximas (empuje máximo). En este caso, será relevante elegir un paquete de motor de rotor más potente, que proporcionará más empuje, o reducir el peso total del dron. A máx. empuje de la central eléctrica = 2 kg, el peso del dron no debe superar la mitad de este valor (1 kg, incluido el peso de los motores). Se puede realizar un cálculo similar para cualquier configuración. Suponga que el peso del hexacóptero (incluido el bastidor, los motores, la electrónica, los accesorios, etc.) es de 2,5 kg. Esto significa que cada motor para un conjunto de este tipo debe proporcionar (2,5 kg ÷ 6 motores) × 2 = 0,83 kg de empuje (o más). Ahora ya sabe cómo calcular el empuje óptimo de los motores en función del peso total, pero antes de tomar una decisión, le sugerimos que se familiarice con las secciones siguientes.
Consideraciones adicionales
- Conectores: Los motores de CC con escobillas tienen dos conectores "" y "-". Cambiar los cables en algunos lugares cambia la dirección de rotación del motor.
- Conectores: Los motores de CC sin escobillas tienen tres conectores. Para saber cómo conectarlos, así como cómo cambiar la dirección de rotación, consulte la sección ESC a continuación.
- Bobinados: Los bobinados afectan el KV de los motores. Si necesita el valor KV más bajo pero le da prioridad al par, es mejor que preste atención a los motores de CC sin escobillas tipo Pancake.
- Montaje: La mayoría de los fabricantes tienen un diagrama de cableado general para motores de CC para motores de CC, lo que permite a las empresas de marcos evitar hacer los llamados adaptadores. La plantilla suele ser métrica, con dos orificios separados por 16 mm y dos orificios más separados por 19 mm (90 ° con respecto al primero).
- Rosca: La rosca de montaje utilizada para conectar el motor sin escobillas al marco puede variar. Los tamaños métricos habituales de los tornillos son M1, M2 y M3, los tamaños imperiales pueden ser 2-56 y 4-40.
2. Rotores principales (hélices)
Los rotores principales (hélices, puntales abreviados) para UAV multirrotor se originan en las hélices de aeronaves radiocontroladas. Muchos se preguntarán: ¿por qué no usar palas de helicóptero? Aunque esto ya se ha hecho, imagina las dimensiones de un hexacóptero con palas de helicóptero. También vale la pena señalar que el sistema de helicópteros requiere un cambio en el paso de las palas, y esto complica significativamente el diseño.
También puede preguntar ¿por qué no utilizar un motor turborreactor, un motor turbofan, un turbohélice, etc.? Seguramente son increíblemente buenos para proporcionar mucho empuje, pero también requieren mucha energía. Si la principal preocupación del dron es moverse muy rápido en lugar de flotar en un espacio confinado, uno de los motores anteriores podría ser una buena opción.
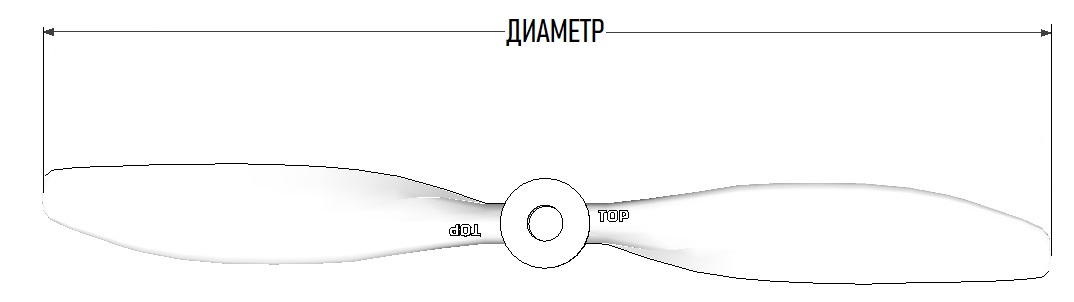
Palas y diámetro
El rotor principal de la mayoría de los vehículos aéreos no tripulados multirrotor tiene dos o tres palas. Las hélices más utilizadas son las de dos palas. No asuma que agregar más hojas aumentará automáticamente el empuje; cada pala trabaja en el flujo perturbado por la pala anterior, reduciendo la eficiencia de la hélice. El rotor principal de pequeño diámetro tiene menos inercia y por lo tanto es más fácil acelerar y desacelerar, lo cual es importante para el vuelo acrobático.

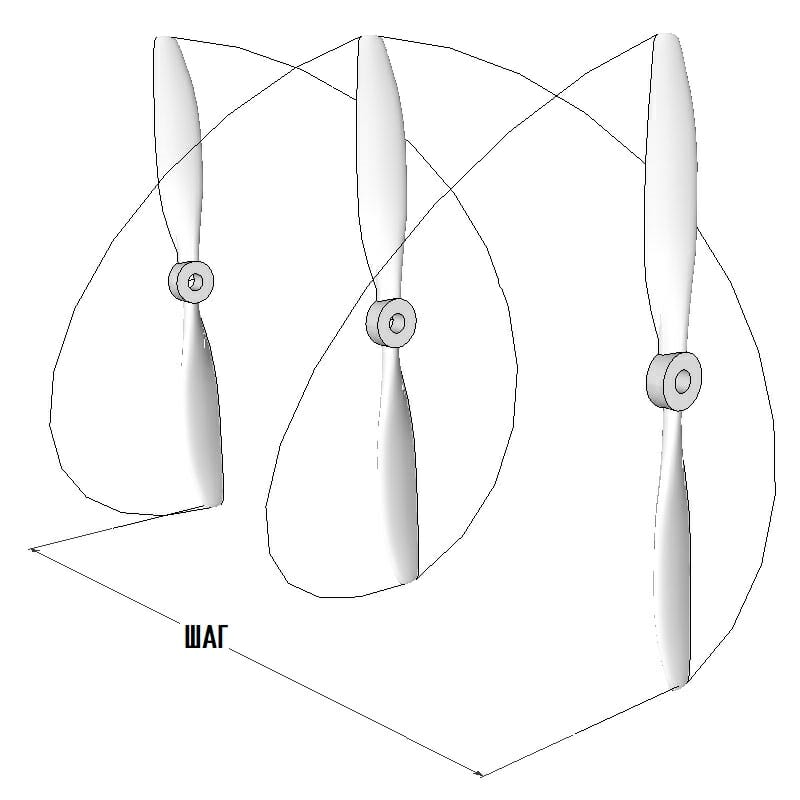
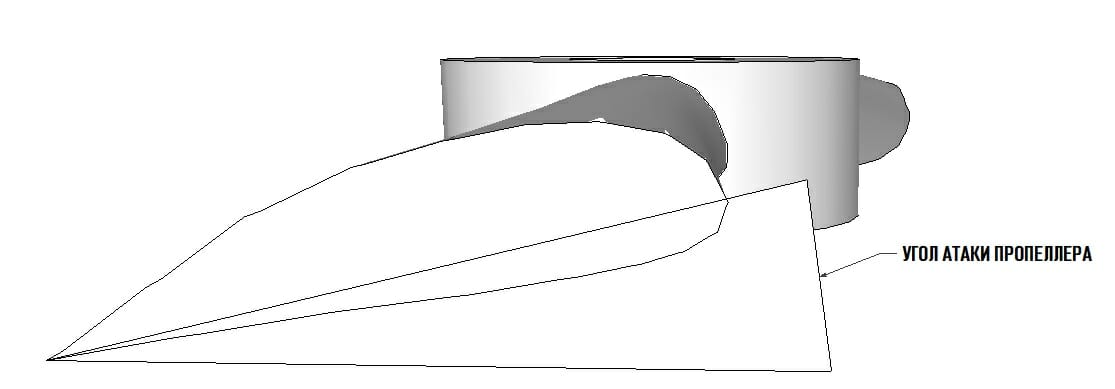
Paso / Ángulo de ataque / Eficiencia / Empuje
El empuje generado por el El rotor principal depende de la densidad del aire, el número de revoluciones de la hélice, su diámetro, la forma y el área de las palas, así como su paso. La eficiencia de una hélice está relacionada con el ángulo de ataque, que se define como el paso de la pala menos el ángulo de la hélice (el ángulo entre la velocidad relativa resultante y la dirección de rotación de la pala). La eficiencia en sí es la relación entre la potencia de salida y la potencia de entrada. La mayoría de las hélices bien diseñadas tienen una eficiencia superior al 80%. El ángulo de ataque está influenciado por la velocidad relativa, por lo que la hélice tendrá una eficiencia diferente a diferentes velocidades del motor. La eficiencia también se ve fuertemente afectada por el borde de ataque de la pala del rotor principal, y es muy importante que sea lo más suave posible. Si bien un diseño de paso variable sería lo mejor, la complejidad adicional requerida sobre la simplicidad inherente del multirrotor significa que casi nunca se usa una hélice de paso variable.
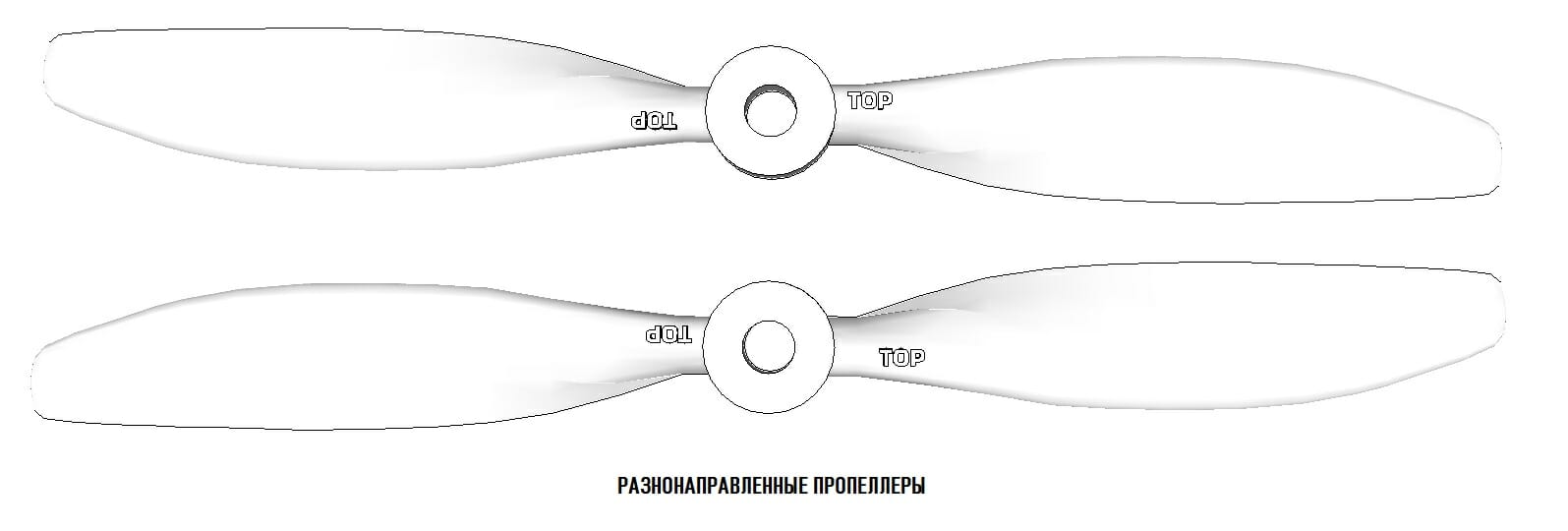
Rotación
Los rotores están diseñados para rotación en sentido horario (CW) o antihorario (CCW). El sentido de giro está indicado por la inclinación de la pala ( observe la hélice desde el extremo de la culataVtailY6X8
Materiales de ejecución
Los materiales utilizados para la fabricación de rotores (hélices) pueden tener un efecto moderado en el vuelo rendimiento, pero la seguridad debe ser una prioridad máxima, especialmente si es un principiante y no tiene experiencia.
- Plástico (ABS / Nylon, etc.) es la opción más popular cuando se trata de vehículos aéreos no tripulados multimotor. Esto se debe en gran parte al bajo costo, las características de vuelo decentes y la durabilidad exponencial. Por lo general, en el caso de un accidente, al menos una hélice se rompe, y mientras dominas el dron y aprendes a volar, siempre tendrás muchos accesorios rotos. La rigidez y la resistencia al impacto del tornillo de plástico se pueden mejorar reforzando con fibra de carbono (carbono), este enfoque es máx. eficaz y no tan caro en comparación con una hélice de fibra de carbono y de pleno derecho.
- Polímero reforzado con fibra (fibra de carbono, nailon reforzado con carbono, etc.) - es la tecnología "avanzada" en muchas relaciones. Las piezas de fibra de carbono todavía no son muy fáciles de fabricar y, por lo tanto, paga más por ellas que por un tornillo de plástico normal con parámetros similares. Una hélice hecha de fibra de carbono es más difícil de romper o doblar y, por lo tanto, si choca, hará más daño a cualquier cosa con la que entre en contacto. Al mismo tiempo, las hélices de carbono generalmente están bien hechas, son más rígidas (proporcionando una pérdida mínima de eficiencia), rara vez necesitan equilibrio y son más livianas que cualquier otro material. Se recomienda considerar tales hélices solo después de que el nivel de pilotaje del usuario sea cómodo.
- La madera es un material poco utilizado para la producción de rotores de vehículos aéreos no tripulados multirrotor, ya que su fabricación requiere procesamiento mecánico. lo que luego hace que las hélices de madera sean más caras que las de plástico. Al mismo tiempo, el árbol es bastante fuerte y nunca se dobla. Tenga en cuenta que las hélices de madera todavía se utilizan en aviones controlados por radio.



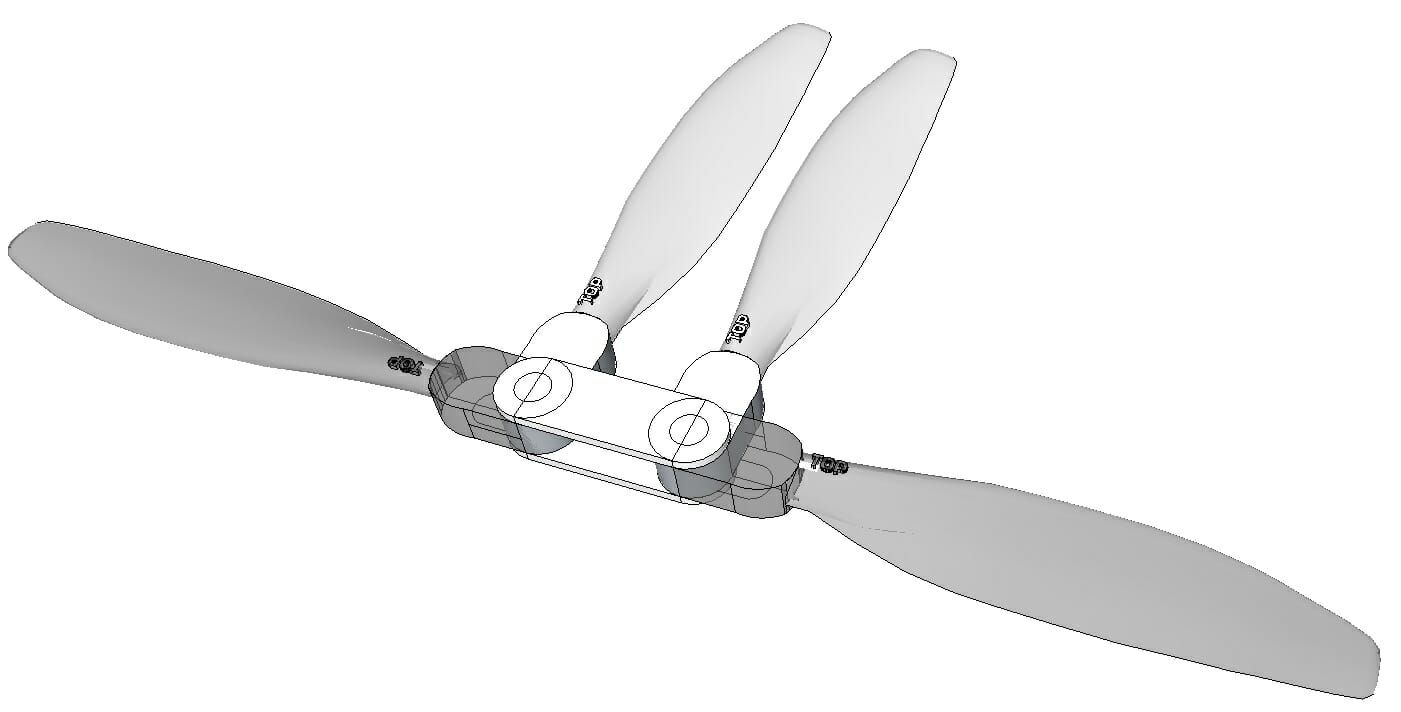
Plegable
Los puntales plegables tienen una parte central que se conecta a dos cuchillas giratorias. Cuando el centro (que está conectado al eje de salida del motor) gira, las fuerzas centrífugas actúan sobre las palas, empujándolas hacia afuera y esencialmente haciendo que la hélice sea "rígida", con el mismo efecto que una hélice clásica no plegable. Debido a la baja demanda y la gran cantidad de piezas necesarias, las hélices plegables son menos comunes. La principal ventaja de los accesorios plegables es la compacidad y, en combinación con un marco plegable, las dimensiones de transporte del dron pueden ser significativamente más pequeñas que las dimensiones de vuelo. Una ventaja concomitante del mecanismo de plegado es la ausencia de la necesidad, en caso de choque, de cambiar la hélice por completo, será suficiente reemplazar solo la pala dañada.
Instalación
Al igual que los UAV, los rotores pueden tener una amplia gama de tamaños. Por lo tanto, hay varios diámetros de eje de motor "estándar" en la industria. A este respecto, el rotor principal se suministra a menudo con un pequeño juego de anillos adaptadores (parecen arandelas con orificios de diferentes diámetros en el centro), que se instalan en el orificio central del puntal
El tornillo se puede fijar al motor según el método de montaje que admita su motor. Si el eje del motor no implica ninguna opción de sujeción (conexión roscada, varios dispositivos de sujeción, etc.), se utilizan adaptadores especiales, como protectores de apoyo y abrazaderas de pinza.
- Propsaver
- Mandril de boquilla
Los motores sin escobillas con un rotor exterior (tipo "Outrunner"), por regla general, en la parte superior del mismo, tienen varios orificios roscadoses una opción igualmente popular para unir la hélice al eje del motor BC
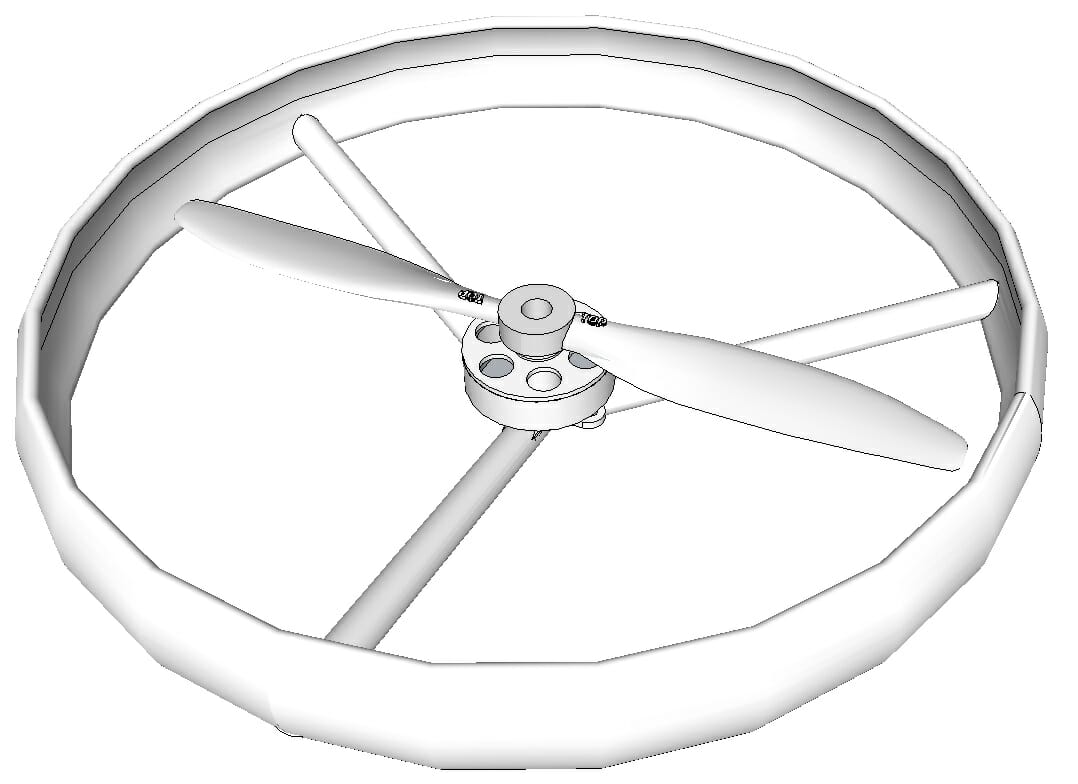
Protección de rotores
Protección de rotores - diseñada para excluir el contacto directo de la planta de energía del UAV con un objeto que se aproxima, preservando así su integridad y operabilidad, así como para evitar lesiones o hélices que giran rápidamente como resultado de colisiones con personas y animales. Los protectores de la hélice están unidos al bastidor principal. Dependiendo de la versión, puede superponerse parcialmente al área de trabajo de la central eléctrica o completamente (protección de anillo). La protección de la hélice se usa con mayor frecuencia en vehículos aéreos no tripulados pequeños (de juguete). El uso de elementos protectores en el ensamblaje también conlleva una serie de compromisos, que incluyen:
- Puede causar vibraciones excesivas.
- Generalmente resiste golpes leves.
- Puede reducir el empuje si se colocan demasiados pies de montaje debajo de la hélice.
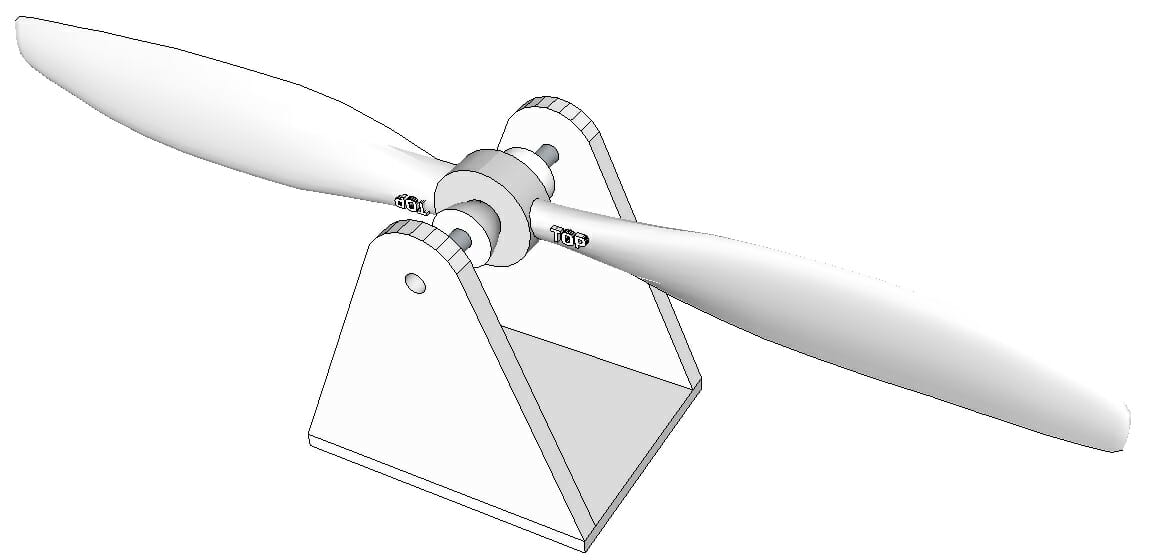
Equilibrio
El equilibrio deficiente ocurre en la mayoría de las hélices económicas. Para asegurarse de esto, no tiene que ir muy lejos, simplemente inserte un lápiz en el orificio central del tornillo (como regla, con un desequilibrio, un lado será más pesado que el otro). Por lo tanto, se recomienda encarecidamente equilibrar los accesorios antes de instalarlos en los motores. Una hélice desequilibrada provocará vibraciones excesivas, que a su vez afectarán negativamente al rendimiento del controlador de vuelo (manifestado en un comportamiento incorrecto del dron en vuelo), sin mencionar un aumento del ruido, un mayor desgaste de los elementos de la central eléctrica y un deterioro en el calidad de disparar una cámara suspendida.
La hélice puede compensarse de diferentes formas, pero si estás construyendo un dron desde cero, entonces en el arsenal de herramientas debe haber un Equilibrador de hélice económico que le permite determinar fácil y simplemente el desequilibrio de peso en la hélice. Para igualar el peso, puede moler la parte más pesada de la hélice (la parte central de la hoja se lija uniformemente y en ningún caso cortar la parte de la hélice), también puede equilibrar pegando un trozo de cinta (delgada) en la hoja más ligera (agregue los gajos de manera uniforme hasta que se alcance el equilibrio). Tenga en cuenta que cuanto más lejos del centro realice una mejora de equilibrio (lijado o agregando una correa) de la hélice, mayor será el efecto basado en el principio de torque.
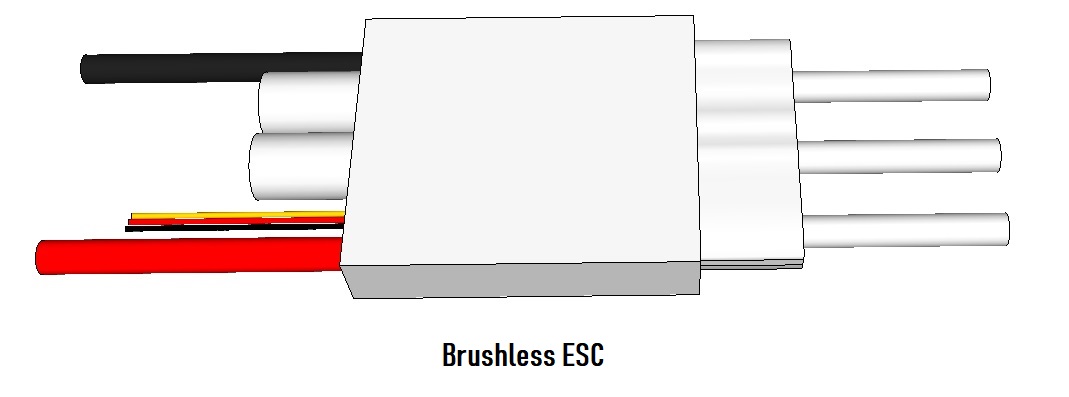
3. ESC
ESC (Controlador electrónico de velocidad en inglés; rus.controlador de velocidad electrónico): permite que el controlador de vuelo controle la velocidad y la dirección del motor. Con el voltaje correcto, el ESC debe poder soportar máx. la corriente que el motor puede consumir y también limitar la corriente que pasa por la fase durante la conmutación. La mayoría de los ESC de hobby de drones solo permiten que el motor gire en una dirección, sin embargo, con el firmware correcto, pueden operar en ambas direcciones.
Conexión
Inicialmente, el ESC puede resultar confuso porque hay varios cables / pines / conectores disponibles para conectarlo. lados (ESC puede venir con o sin conectores soldados).
- Fuente de alimentación: Se proporcionan dos cables gruesos (generalmente negro y rojo) para suministrar energía desde el tablero / arnés de distribución al que la energía proviene directamente de la batería principal de la aeronave.
- 3 conectores: Hay tres conectores disponibles en el lado opuesto del controlador para conectar a tres conectores de bala (generalmente suministrados con motores) en un motor sin escobillas. El uso de conectores al conectar el ESC permite, si es necesario (en caso de falla), cambiar rápidamente el controlador sin usar un soldador. Sucede que los conectores en forma de bala que vienen con el motor no coinciden con los conectores del regulador, en cuyo caso, simplemente reemplácelos por otros adecuados. ¿Cuál de los tres es "más" y cuál es "menos"? El punto de referencia es un cable positivo simple que viene de la batería, pasa a positivo en ESC, de manera similar con un signo menos.
- Servoconector R / C de 3 pines con cables delgados: a través del cual se procesa la señal proveniente del receptor, de la cual un cable es señal (transmisión de la señal de gas al ESC o entrada), el segundo "Menos" (o tierra) y un cable positivo (no se usa si no hay BEC incorporado; con BEC incorporado, es una salida de potencia de 5 V, que luego se puede usar para alimentar electrónica de a bordo).
BEC
En los primeros días del modelado de aeronaves, se utilizaba un motor de combustión interna como planta de energía, y la electrónica a bordo funcionaba con un pequeño batería. Con el advenimiento de la tracción eléctrica y los controladores (ESC), en este último, comenzaron a incluir el llamado circuito de eliminación de batería - BEC (en inglés) Battery Eliminator Circuit; o convertidor de potencia a bordo; por regla general, proporciona una fuente de corriente adicional con un voltaje de 5 V a una corriente de 1 A o superior). En otras palabras, es un convertidor de voltaje utilizado en el ensamblaje LiPo en un voltaje para alimentar la electrónica de a bordo del dron.
Al ensamblar el multi-rotor, todos los ESC deben estar conectados al controlador de vuelo, pero solo se requiere un BEC, de lo contrario pueden surgir problemas al alimentar las mismas líneas. Dado que generalmente no hay forma de deshabilitar el BEC en un ESC, es mejor quitar el cable rojo () y envolverlo con cinta aislante para todos los ESC excepto uno. También es importante dejar el cable negro (tierra) para la tierra común.
Firmware
No todos los ESC del mercado son igualmente buenos para aplicaciones de múltiples rotores. Es importante comprender que antes de la llegada de los vehículos aéreos no tripulados de varios motores, los motores sin escobillas se utilizaban principalmente como planta de energía para automóviles, aviones y helicópteros controlados por radio. La mayoría no requieren actualizaciones ni tiempos de respuesta rápidos. Los ESC con software integrado SimonK o BLHeli pueden reaccionar muy rápidamente a los cambios entrantes, lo que generalmente marca la diferencia entre un vuelo estable o un accidente.
Distribución de energía
Dado que cada ESC es alimentado por la batería principal, el conector de la batería principal debe dividirse de alguna manera en cuatro ESC. Esto se hace usando la placa de distribución de energía o el arnés de distribución de energía. Esta placa (o cable) divide los terminales positivo y negativo de la batería principal en cuatro. Es importante tener en cuenta que los tipos de conectores utilizados en la batería, el ESC y el tablero de distribución pueden no ser los mismos, por lo que es mejor elegir un conector "estándar" siempre que sea posible (por ejemplo, Deans
4. Batería
Química
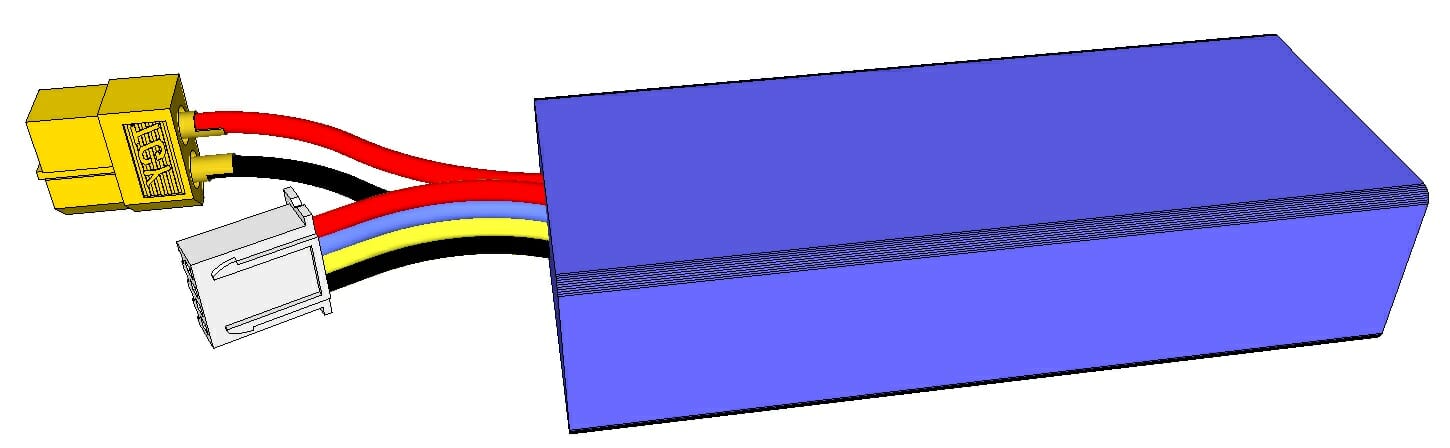
Las baterías que se utilizan en los vehículos aéreos no tripulados son actualmente exclusivamente polímero de litio (LiPo), y la composición de algunas de ellas es bastante exótica: litio, manganeso u otro tipo de litio. variantes. El ácido de plomo simplemente no es adecuado y NiMh / NiCd todavía son demasiado pesados para su capacidad y, a menudo, no pueden proporcionar las altas tasas de descarga requeridas. LiPo ofrece un alto rendimiento y una tasa de descarga a la vez que es liviano. Las desventajas son su costo relativamente alto y los constantes problemas de seguridad (peligro de incendio).
Voltaje
En la práctica, solo necesita una batería para su UAV. El voltaje de esta batería debe coincidir con los motores BK que ha seleccionado. Casi todas las baterías que se utilizan hoy en día se basan en litio y contienen varias celdas (latas) de 3,7 V cada una, donde 3,7 V = 1S (es decir, batería de una lata; 2S es de dos latas, etc.). Por lo tanto, es probable que una batería etiquetada como 4S tenga un valor nominal de 4 × 3.7V = 14.8V. Además, la cantidad de latas lo ayudará a determinar qué cargador usar. Tenga en cuenta que una batería de celda única de alta capacidad puede parecer físicamente una batería de celda múltiple de baja capacidad.
Capacidad
La capacidad de la batería se mide en amperios-hora (Ah). Las baterías pequeñas pueden tener una capacidad de 0.1Ah (100mAh), la capacidad de la batería para drones de tamaño mediano puede variar de 2-3Ah (2000mAh - 3000mAh). Cuanto mayor sea la capacidad, mayor será el tiempo de vuelo y, en consecuencia, más pesada será la batería. El tiempo de vuelo de un UAV convencional puede estar en el rango de 10-20 minutos, lo que puede parecer de corta duración, pero debe comprender que el dron lucha constantemente con la gravedad durante el vuelo y, a diferencia de un avión, no tiene superficies. (alas) que brindan asistencia en forma de fuerza de elevación óptima.
Tasa de descarga
La tasa de descarga de la batería de litio se mide en "C", donde 1C es la capacidad de la batería (generalmente en amperios hora, a menos que esté considerando un dron del tamaño de Palma). La tasa de descarga de la mayoría de las baterías LiPo es de al menos 5C (cinco veces la capacidad), pero dado que la mayoría de los motores utilizados en los UAV multirrotor consumen mucha corriente, la batería debe poder descargarse a una corriente increíblemente alta, que generalmente es alrededor de 30 A o más.
Seguridad
Las baterías de LiPo no son del todo seguras ya que contienen gas hidrógeno presurizado y tienen una tendencia a quemarse y / o explotar cuando algo, algo está mal. Por lo tanto, si tiene alguna duda sobre el estado de la batería, en ningún caso, no la conecte al dron o incluso al cargador, considérela "desmantelada" y deséchela correctamente. Las señales reveladoras de que algo anda mal con la batería son abolladuras o hinchazón (es decir, fuga de gas). Al cargar una batería de LiPo, es mejor utilizar una caja de LiPo segura (Caja de seguridad de la batería). El almacenamiento de la batería

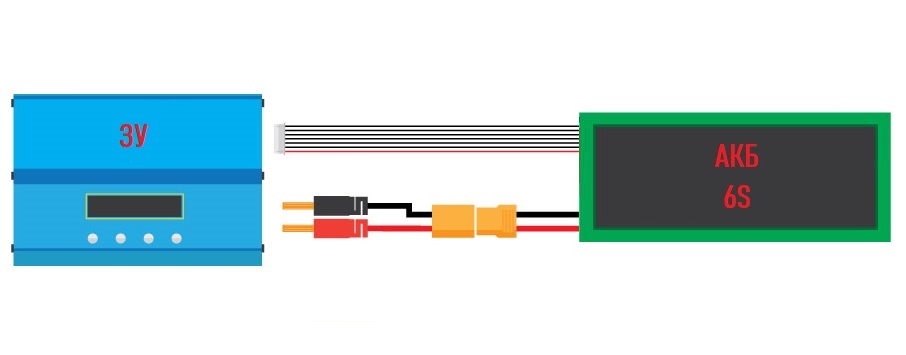
Carga
La mayoría de las baterías LiPo tienen dos conectoresEl cargadorlos problemas de seguridad asociados con las baterías de polímero de litio
.Montaje
La batería es el elemento más pesado del dron, por lo que debe instalarse en el centro del punto muerto para garantizar la misma carga en los motores. La batería no implica ningún montaje especial (especialmente tornillos autorroscantes que pueden dañar el LiPo y provocar un incendio), por lo que algunos métodos de montaje utilizados en la actualidad incluyen correas de velcro, goma, compartimentos de plástico y otros. La opción de montaje de la batería más común es colgar la batería debajo del marco con una correa de velcro.







