เนื้อหา
- โดรน DIY: บทที่ 1 คำศัพท์
- โดรน Do-it-yourself: บทที่ 2. เฟรม
- โดรน Do-it-yourself: บทที่ 3. โรงไฟฟ้า
- โดรน Do-it-yourself: บทที่ 4. ผู้ควบคุมการบิน
- โดรนทำเอง: บทที่ 5. การประกอบ
- โดรนทำเอง: บทที่ 6 การตรวจสอบประสิทธิภาพ
- โดรนทำเอง: บทที่ 7 FPV และระยะทาง
- ทำเสียงขึ้นจมูกด้วยมือของคุณเอง: บทที่ 8 เครื่องบิน
บทนำ
เมื่อคุณเลือกหรือสร้างเฟรมแล้ว ขั้นตอนต่อไปคือการเลือกระบบส่งกำลังที่ถูกต้อง เนื่องจากโดรนที่มีอยู่ส่วนใหญ่เป็นแบบไฟฟ้า เราจะมุ่งเน้นไปที่การสร้างแรงขับด้วยไฟฟ้าล้วนๆ ผ่านมอเตอร์กระแสตรงไร้แปรงถ่าน โรงไฟฟ้าประกอบด้วยมอเตอร์ ใบพัด (ใบพัด อุปกรณ์ประกอบฉาก) ESC และ แบตเตอรี่สำหรับจัดเก็บ
1. มอเตอร์
จากมอเตอร์ที่คุณใช้ในการประกอบ จะขึ้นอยู่กับว่าโดรนสามารถรับน้ำหนักสูงสุดได้เท่าใด และบินได้นานแค่ไหน โรงไฟฟ้าจำเป็นต้องประกอบด้วยมอเตอร์ที่มียี่ห้อและรุ่นเดียวกัน วิธีนี้จะช่วยให้มีการทำงานที่สมดุล ควรสังเกตว่าแม้แต่มอเตอร์ (ยี่ห้อ / รุ่น) ที่เหมือนกันทุกประการก็สามารถมีความเร็วที่แตกต่างกันเล็กน้อยซึ่งต่อมาปรับระดับโดยตัวควบคุมการบิน
Brushed vs Brushless
ในมอเตอร์แบบ Brushed โรเตอร์แผลจะหมุนภายในสเตเตอร์ซึ่งแม่เหล็กจะถูกยึดอย่างแน่นหนา ในมอเตอร์แบบไม่มีแปรงถ่าน ขดลวดได้รับการแก้ไขอย่างแน่นหนากับด้านในของสเตเตอร์และแม่เหล็กจะติดตั้งบนเพลาและหมุน ในกรณีส่วนใหญ่ คุณจะพิจารณาเฉพาะมอเตอร์กระแสตรงไร้แปรงถ่าน (BC) เท่านั้น มอเตอร์ประเภทนี้มีการใช้กันอย่างแพร่หลายในอุตสาหกรรมวิทยุสมัครเล่นเพื่อประกอบผลิตภัณฑ์ตั้งแต่เฮลิคอปเตอร์และเครื่องบินไปจนถึงระบบขับเคลื่อนในรถยนต์และเรือ
มอเตอร์ไร้แปรงถ่านสำหรับแพนเค้กจะมีเส้นผ่านศูนย์กลางใหญ่กว่า แบนกว่า และโดยทั่วไปมีแรงบิดสูงและ KV ที่ต่ำกว่า (รายละเอียดด้านล่าง) UAV ขนาดเล็ก (โดยปกติขนาดเท่าฝ่ามือ) มักใช้มอเตอร์แบบมีแปรงถ่านขนาดเล็ก เนื่องจากมีต้นทุนที่ต่ำกว่าและตัวควบคุมแบบสองสายที่เรียบง่าย แม้ว่ามอเตอร์แบบไม่มีแปรงจะมีขนาดและข้อกำหนดต่างกัน แต่การเลือกขนาดที่เล็กกว่าไม่ได้หมายความว่าจะมีราคาถูกกว่า

Inrunner vs Outrunner
มอเตอร์กระแสตรงไร้แปรงถ่านมีหลายประเภท:
- Inrunner เป็นโรเตอร์ภายใน. ขดลวดยึดติดกับสเตเตอร์ แม่เหล็กจะติดตั้งอยู่บนเพลาโรเตอร์ ซึ่งหมุนได้ (มักใช้กับเรือ RC เฮลิคอปเตอร์และรถยนต์เนื่องจาก KV สูง)
- Outrunner - โรเตอร์ด้านนอก. แม่เหล็กยึดกับสเตเตอร์ที่หมุนรอบขดลวดนิ่ง ด้านล่างของมอเตอร์ได้รับการแก้ไข(ตามกฎแล้วมอเตอร์ประเภทนี้จะมีแรงบิดมากกว่า)
- Hybrid Outrunner - นี่คือเทคนิค "Outrunner" แต่ใช้ในแพ็คเกจ "Inrunner" วิธีนี้ทำให้สามารถรวมแรงบิด "Outrunner" เข้าด้วยกันในประเภทเดียวและไม่มีองค์ประกอบหมุนภายนอกเช่นเดียวกับในมอเตอร์ประเภท "Inrunner"
KV
ระดับ KV - สูงสุด จำนวนรอบที่มอเตอร์สามารถพัฒนาได้โดยไม่สูญเสียพลังงานที่แรงดันไฟฟ้าที่กำหนด สำหรับ UAV แบบหลายใบพัดส่วนใหญ่ ค่า KV ต่ำ (เช่น จาก 500 ถึง 1000) มีความเกี่ยวข้อง เนื่องจากช่วยให้มั่นใจได้ถึงความเสถียร ในขณะที่สำหรับการบินผาดโผน ค่า KV ระหว่าง 1,000 ถึง 1500 จะมีความเกี่ยวข้อง ควบคู่ไปกับโรเตอร์ที่มีเส้นผ่านศูนย์กลางเล็กกว่า (ใบพัด) สมมติว่าค่า KV สำหรับมอเตอร์บางรุ่นคือ 650 รอบต่อนาที จากนั้นที่แรงดันไฟฟ้า 11.1V มอเตอร์จะหมุนด้วยความเร็ว: 11.1 × 650 = 7215 รอบต่อนาที และหากคุณใช้มอเตอร์ที่แรงดันไฟฟ้าต่ำกว่า (เช่น 7.4V)) จากนั้นความเร็วในการหมุนจะเป็น: 7.4 × 650 = 4810 รอบต่อนาที อย่างไรก็ตาม สิ่งสำคัญที่ควรทราบก็คือ การใช้แรงดันไฟฟ้าต่ำโดยทั่วไปหมายถึงการใช้กระแสไฟที่สูงขึ้น (กำลัง = กระแส x แรงดัน)
แรงขับ
ผู้ผลิตมอเตอร์แบบไม่มีแปรงบางรายอาจระบุในข้อมูลข้อมูลจำเพาะเกี่ยวกับแรงขับสูงสุด (Thrust) ที่สร้างขึ้นโดยมอเตอร์ร่วมกับโรเตอร์หลักที่แนะนำ หน่วยวัดแรงขับมักจะเป็นกิโลกรัม (Kg / Kg), ปอนด์ (Lbs) หรือ Newton (N) ตัวอย่างเช่น หากคุณกำลังสร้างควอดคอปเตอร์ และคุณทราบค่าแรงขับของมอเตอร์ตัวเดียว = มากถึง 0.5 กก. ในห้องที่มีโรเตอร์ขนาด 11 นิ้ว จากนั้นที่เอาต์พุต สามารถยกมอเตอร์ดังกล่าวสี่ตัวที่แรงขับสูงสุดได้: 0.5 กก. × 4 = 2กก. ดังนั้น หากน้ำหนักรวมของควอดคอปเตอร์ของคุณน้อยกว่า 2 กก. เล็กน้อย โรงไฟฟ้าดังกล่าวจะออกที่รอบต่อนาทีสูงสุดเท่านั้น (แรงขับสูงสุด) ในกรณีนี้ การเลือกชุดโรเตอร์โรเตอร์ที่มีประสิทธิภาพมากขึ้นจะมีความเกี่ยวข้อง ซึ่งจะให้แรงขับที่มากกว่า หรือเพื่อลดน้ำหนักรวมของโดรน สูงสุด แรงขับของโรงไฟฟ้า = 2 กก. น้ำหนักของโดรนไม่ควรเกินครึ่งหนึ่งของค่านี้ (1 กก. รวมน้ำหนักของมอเตอร์ด้วย) การคำนวณที่คล้ายกันสามารถทำได้สำหรับการกำหนดค่าใดๆ สมมติว่าน้ำหนักของเฮกซาคอปเตอร์ (รวมถึงเฟรม มอเตอร์ อิเล็กทรอนิกส์ อุปกรณ์เสริม ฯลฯ) คือ 2.5 กก. ซึ่งหมายความว่าแต่ละเครื่องยนต์สำหรับการประกอบดังกล่าวจะต้องมี (2.5 กก. ÷ 6 มอเตอร์) × 2 = 0.83 กก. แรงขับ (หรือมากกว่า) ตอนนี้คุณรู้วิธีคำนวณแรงขับที่เหมาะสมที่สุดของมอเตอร์ตามน้ำหนักรวมแล้ว แต่ก่อนตัดสินใจ เราขอแนะนำให้คุณทำความคุ้นเคยกับส่วนต่างๆ ด้านล่าง
ข้อควรพิจารณาเพิ่มเติม
- ตัวเชื่อมต่อ: DC brushed motors มีตัวเชื่อมต่อสองตัว "" และ "-" การเปลี่ยนสายไฟในสถานที่เปลี่ยนทิศทางการหมุนของมอเตอร์
- คอนเนคเตอร์: มอเตอร์กระแสตรงไร้แปรงถ่านมีสามคอนเนคเตอร์ หากต้องการทราบวิธีเชื่อมต่อ ตลอดจนวิธีเปลี่ยนทิศทางการหมุน โปรดดูส่วน ESC ด้านล่าง
- ขดลวด: ขดลวดส่งผลต่อ KV ของมอเตอร์หากคุณต้องการค่า KV ต่ำสุด แต่ให้ความสำคัญกับแรงบิด คุณควรหันมาสนใจมอเตอร์ DC แบบไม่มีแปรงถ่านชนิดแพนเค้ก
- การติดตั้ง: ผู้ผลิตส่วนใหญ่มีแผนภาพการเดินสายไฟทั่วไปสำหรับมอเตอร์กระแสตรงสำหรับมอเตอร์กระแสตรง ซึ่งช่วยให้บริษัทเฟรมหลีกเลี่ยงการทำอะแดปเตอร์ที่เรียกว่า แม่แบบมักจะเป็นแบบเมตริก โดยมีสองรูห่างกัน 16 มม. และอีกสองรูห่างกัน 19 มม. (90 °ถึงรูแรก)
- เกลียว: เกลียวยึดที่ใช้ยึดมอเตอร์แบบไม่มีแปรงเข้ากับเฟรมอาจแตกต่างกันไป ขนาดเมตริกปกติของสกรูคือ M1, M2 และ M3 ขนาดอิมพีเรียลสามารถเป็น 2-56 และ 4-40
2. ใบพัดหลัก (ใบพัด)
ใบพัดหลัก (ใบพัด อุปกรณ์ประกอบฉากแบบย่อ) สำหรับ UAV แบบหลายใบพัดมาจากใบพัดของเครื่องบินควบคุมด้วยวิทยุ หลายคนจะถามว่า: ทำไมไม่ใช้ใบพัดเฮลิคอปเตอร์ล่ะ? แม้ว่าจะเสร็จแล้ว ลองจินตนาการถึงขนาดของเฮกซาคอปเตอร์ที่มีใบพัดเฮลิคอปเตอร์ นอกจากนี้ยังเป็นที่น่าสังเกตว่าระบบเฮลิคอปเตอร์จำเป็นต้องเปลี่ยนระยะพิทช์ของใบพัด และทำให้การออกแบบซับซ้อนขึ้นอย่างมาก
คุณอาจถามว่าทำไมไม่ใช้เครื่องยนต์ turbojet, turbofan engine, turboprop ฯลฯ? แน่นอนว่าพวกมันสามารถให้แรงขับได้ดีอย่างไม่น่าเชื่อ แต่ก็ต้องการพลังงานจำนวนมากเช่นกัน หากความกังวลหลักของโดรนคือต้องเคลื่อนที่อย่างรวดเร็วมากกว่าที่จะลอยอยู่ในพื้นที่จำกัด มอเตอร์ตัวใดตัวหนึ่งข้างต้นอาจเป็นทางเลือกที่ดี
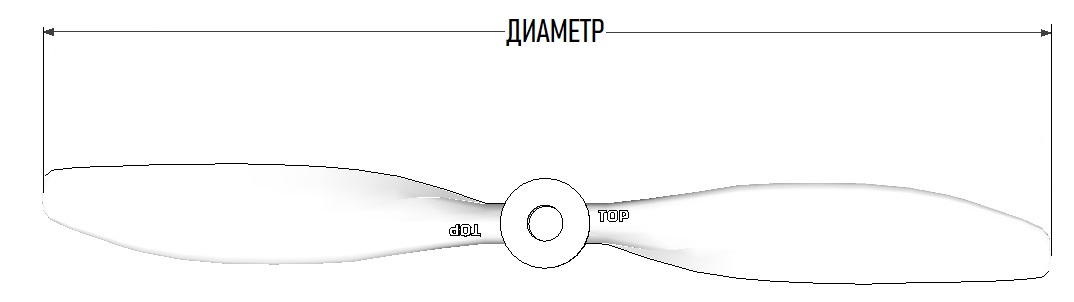
ใบมีดและเส้นผ่านศูนย์กลาง
โรเตอร์หลักของ UAV แบบหลายใบพัดส่วนใหญ่มีใบมีดสองหรือสามใบ ใบพัดที่ใช้กันอย่างแพร่หลายมากที่สุดมีสองใบ อย่าคิดว่าการเพิ่มใบมีดจะเพิ่มแรงขับโดยอัตโนมัติ ใบพัดแต่ละใบทำงานในกระแสที่ถูกรบกวนโดยใบมีดก่อนหน้า ทำให้ประสิทธิภาพของใบพัดลดลง โรเตอร์หลักที่มีเส้นผ่านศูนย์กลางขนาดเล็กมีความเฉื่อยน้อยกว่า ดังนั้นจึงเร่งและลดความเร็วได้ง่ายกว่า ซึ่งเป็นสิ่งสำคัญสำหรับการบินผาดโผน

ทางลาด / มุมของการโจมตี / ประสิทธิภาพ / แรงผลักดัน
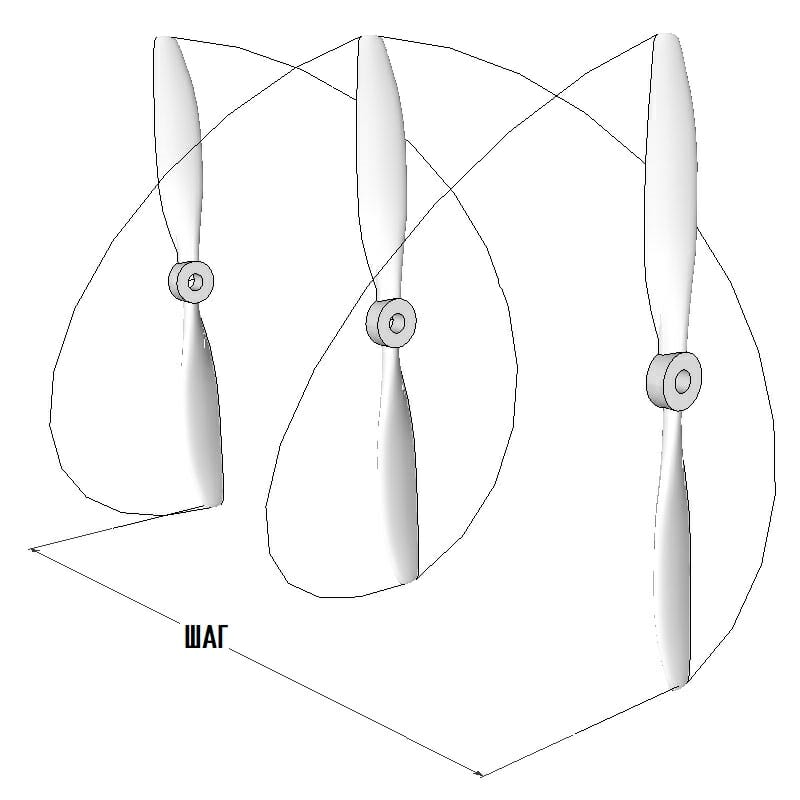
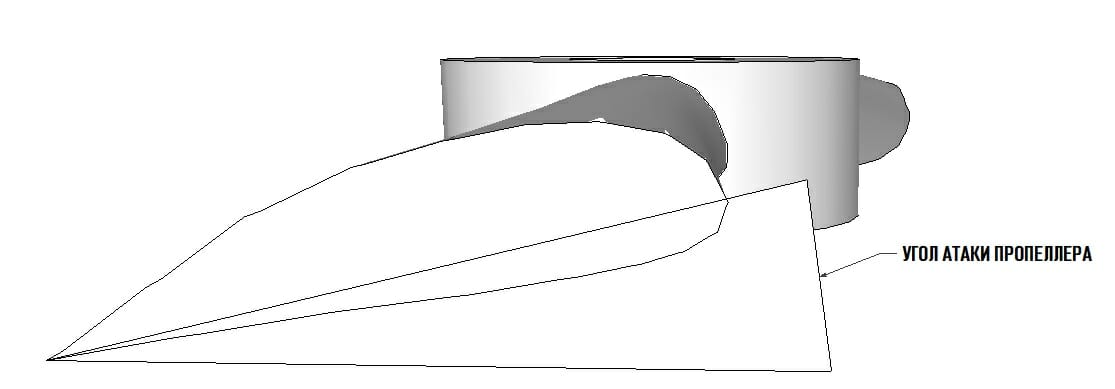
แรงผลักดันที่เกิดจาก ใบพัดหลักขึ้นอยู่กับความหนาแน่นของอากาศ จำนวนรอบของใบพัด เส้นผ่านศูนย์กลาง รูปร่าง และพื้นที่ของใบพัด ตลอดจนระยะพิทช์ ประสิทธิภาพของใบพัดสัมพันธ์กับมุมของการโจมตี ซึ่งกำหนดเป็นระยะห่างของใบมีดลบด้วยมุมเกลียว (มุมระหว่างความเร็วสัมพัทธ์ที่เกิดกับทิศทางการหมุนของใบมีด) ประสิทธิภาพคืออัตราส่วนของกำลังขับต่อกำลังไฟฟ้าเข้า ใบพัดที่ออกแบบมาอย่างดีส่วนใหญ่มีประสิทธิภาพมากกว่า 80% มุมของการโจมตีจะขึ้นอยู่กับความเร็วสัมพัทธ์ ดังนั้นใบพัดจะมีประสิทธิภาพแตกต่างกันที่ความเร็วมอเตอร์ต่างกัน ประสิทธิภาพยังได้รับผลกระทบอย่างมากจากขอบชั้นนำของใบมีดโรเตอร์หลัก และสิ่งสำคัญคือต้องเรียบให้มากที่สุดแม้ว่าการออกแบบระยะพิทช์แบบแปรผันจะดีที่สุด แต่ความซับซ้อนที่เพิ่มขึ้นซึ่งต้องการความเรียบง่ายโดยธรรมชาติของโรเตอร์หลายตัวหมายความว่าแทบจะไม่เคยใช้ใบพัดพิทช์แบบแปรผัน
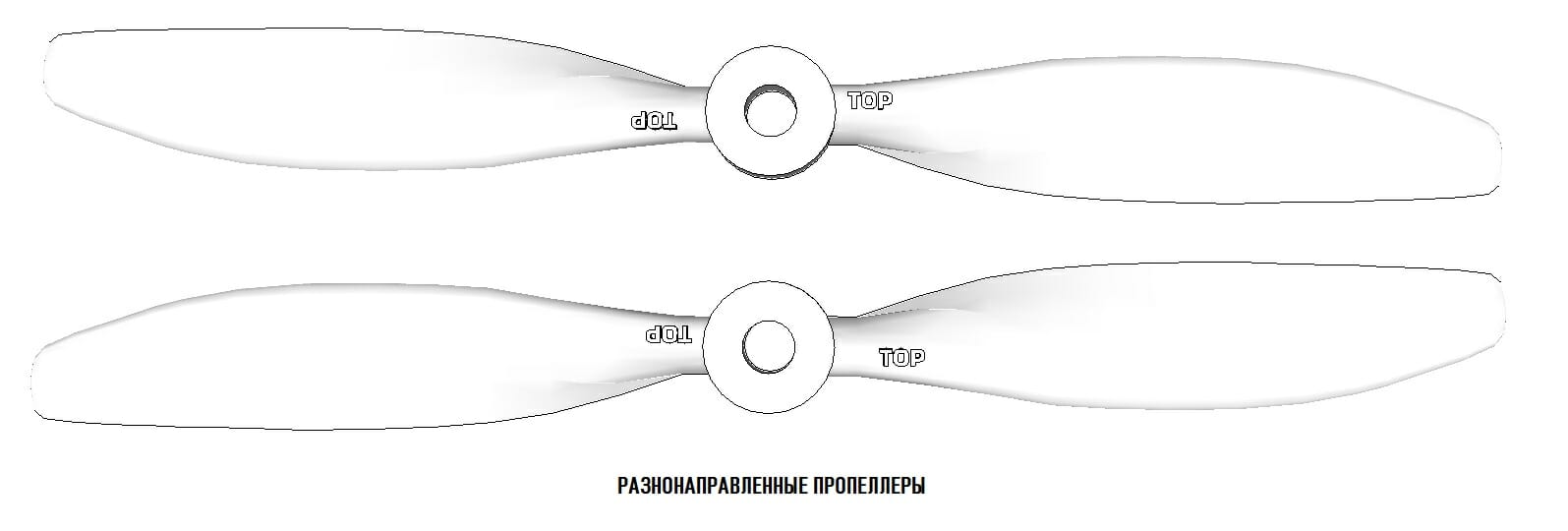
การหมุน
โรเตอร์ได้รับการออกแบบสำหรับการหมุนตามเข็มนาฬิกา (CW) หรือทวนเข็มนาฬิกา (ทบ.). ทิศทางการหมุนจะแสดงโดยความเอียงของใบมีด ( ดูที่ใบพัดจากปลายก้นVtailY6X8
วัสดุที่ใช้ในการดำเนินการ
วัสดุที่ใช้สำหรับการผลิตใบพัด (ใบพัด) อาจมีผลปานกลางในการบิน ประสิทธิภาพ แต่ความปลอดภัยควรมีความสำคัญสูงสุด โดยเฉพาะอย่างยิ่งหากคุณเป็นมือใหม่และไม่มีประสบการณ์
- พลาสติก (ABS / Nylon ฯลฯ) เป็นตัวเลือกที่นิยมมากที่สุดเมื่อพูดถึง UAV แบบหลายเครื่องยนต์ สาเหตุหลักมาจากต้นทุนที่ต่ำ ลักษณะการบินที่เหมาะสม และความทนทานแบบทวีคูณ โดยปกติในกรณีที่เกิดการชน ใบพัดอย่างน้อยหนึ่งใบชำรุด และในขณะที่คุณควบคุมโดรนและเรียนรู้ที่จะบิน คุณจะมีอุปกรณ์ประกอบฉากที่หักจำนวนมากเสมอ สามารถปรับปรุงความแข็งและทนต่อแรงกระแทกของสกรูพลาสติกได้โดยการเสริมแรงด้วยเส้นใยคาร์บอน (คาร์บอน) วิธีนี้สูงสุด มีประสิทธิภาพและไม่แพงนักเมื่อเทียบกับใบพัดคาร์บอนไฟเบอร์ที่เต็มเปี่ยม
- โพลีเมอร์เสริมไฟเบอร์ (คาร์บอนไฟเบอร์ ไนลอนเสริมคาร์บอน ฯลฯ) - เป็นเทคโนโลยี "ขั้นสูง" ในหลายความสัมพันธ์ ชิ้นส่วนคาร์บอนไฟเบอร์ยังคงผลิตได้ไม่ง่ายนัก ดังนั้นคุณจึงต้องจ่ายมากกว่าสกรูพลาสติกทั่วไปที่มีพารามิเตอร์ใกล้เคียงกัน ใบพัดที่ทำจากคาร์บอนไฟเบอร์จะหักหรืองอได้ยากกว่า ดังนั้น หากใบพัดแตก จะทำให้เกิดความเสียหายมากขึ้นกับสิ่งที่สัมผัส ในเวลาเดียวกัน โดยทั่วไปแล้วใบพัดคาร์บอนจะทำได้อย่างดี แข็งขึ้น (ทำให้สูญเสียประสิทธิภาพน้อยที่สุด) แทบไม่ต้องการการทรงตัว และมีน้ำหนักเบากว่าวัสดุอื่นๆ ขอแนะนำให้พิจารณาใบพัดดังกล่าวหลังจากที่ระดับการขับเครื่องบินของผู้ใช้สบายขึ้นเท่านั้น
- ไม้ เป็นวัสดุที่ไม่ค่อยได้ใช้ในการผลิตใบพัด UAV หลายใบพัด เนื่องจากการผลิตต้องใช้การประมวลผลทางกล ซึ่งต่อมาทำให้ใบพัดไม้มีราคาแพงกว่าใบพัดพลาสติกในขณะเดียวกัน ต้นไม้ก็ค่อนข้างแข็งแรงและไม่โค้งงอ โปรดทราบว่ายังคงใช้ใบพัดไม้ในเครื่องบินที่ควบคุมด้วยวิทยุ



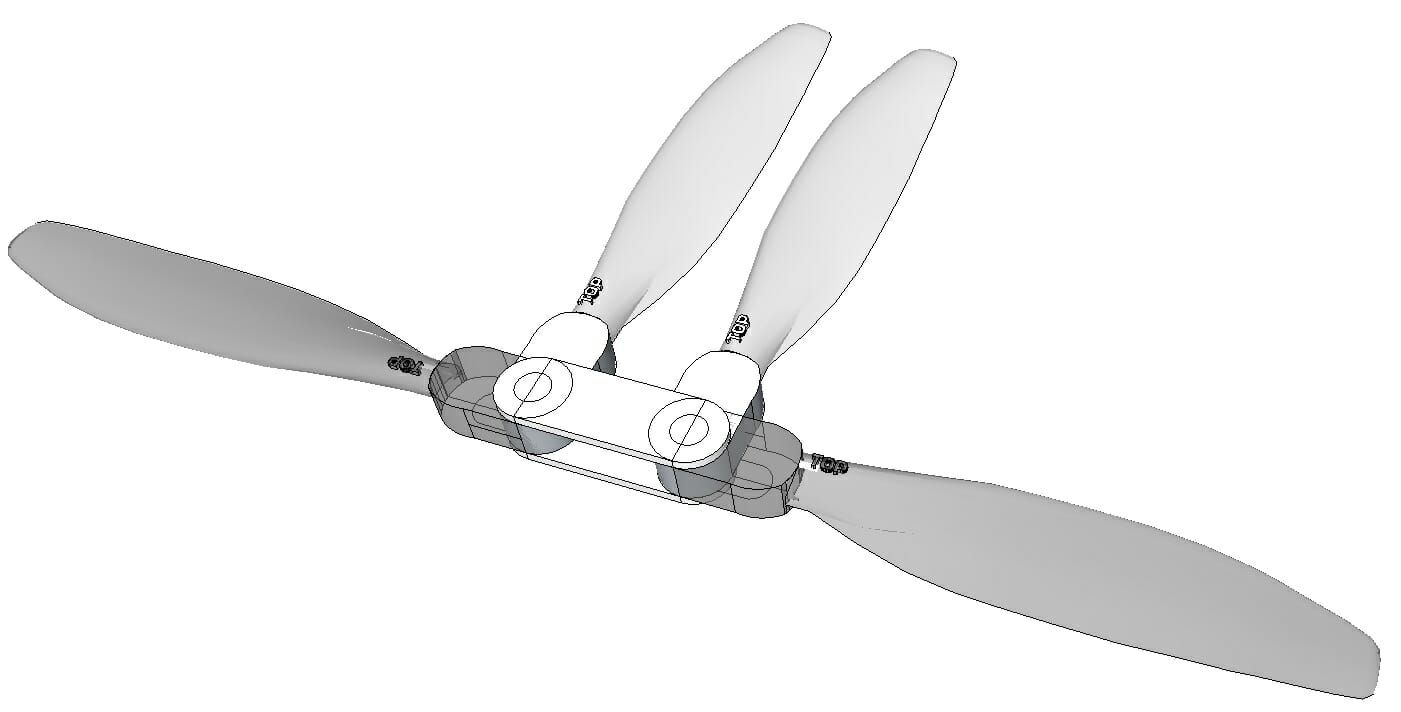
พับได้
อุปกรณ์ประกอบฉากแบบพับได้มีส่วนตรงกลางที่เชื่อมต่อกับใบมีดหมุนสองใบ เมื่อศูนย์กลาง (ซึ่งเชื่อมต่อกับเพลาส่งออกของมอเตอร์) หมุน แรงเหวี่ยงจะกระทำกับใบพัด ผลักใบพัดออกไปด้านนอก และทำให้ใบพัด "แข็ง" โดยให้ผลเช่นเดียวกับใบพัดแบบไม่พับแบบคลาสสิก เนื่องจากความต้องการต่ำและชิ้นส่วนที่จำเป็นจำนวนมาก ใบพัดแบบพับได้จึงไม่ค่อยพบเห็น ข้อได้เปรียบหลักของอุปกรณ์ประกอบฉากพับคือความกะทัดรัด และเมื่อใช้ร่วมกับโครงพับ ขนาดการขนส่งของโดรนอาจเล็กกว่าขนาดการบินอย่างมาก ข้อได้เปรียบร่วมกันของกลไกการพับคือไม่จำเป็นต้องเปลี่ยนใบพัดทั้งหมดในกรณีที่เกิดการชนกัน การเปลี่ยนเฉพาะใบมีดที่เสียหายก็เพียงพอแล้ว
การติดตั้ง
เช่นเดียวกับ UAV โรเตอร์สามารถมีขนาดได้หลากหลาย ดังนั้นจึงมีเส้นผ่านศูนย์กลางเพลามอเตอร์ "มาตรฐาน" จำนวนมากในอุตสาหกรรม ในการเชื่อมต่อนี้ โรเตอร์หลักมักจะมาพร้อมกับแหวนอะแดปเตอร์ขนาดเล็ก (ดูเหมือนแหวนรองที่มีรูที่มีเส้นผ่านศูนย์กลางต่างกันตรงกลาง) ซึ่งติดตั้งอยู่ในรูตรงกลาง ของเสา
สามารถยึดสกรูเข้ากับมอเตอร์ได้ตามวิธีการติดตั้งที่มอเตอร์ของคุณรองรับ หากเพลามอเตอร์ไม่ได้หมายความถึงตัวเลือกการยึดใดๆ (การเชื่อมต่อแบบเกลียว อุปกรณ์ยึดต่างๆ ฯลฯ) ให้ใช้อะแดปเตอร์พิเศษ เช่น พร็อพเซฟเวอร์และแคลมป์คอลเล็ต
- Propsaver
- Collet chuck
มอเตอร์ไร้แปรงถ่านที่มีโรเตอร์ด้านนอก (ประเภท "Outrunner") ตามกฎแล้วจะมี รูเกลียวหลายรูเป็นตัวเลือกที่นิยมใช้กันในการติดใบพัดกับเพลามอเตอร์ BC
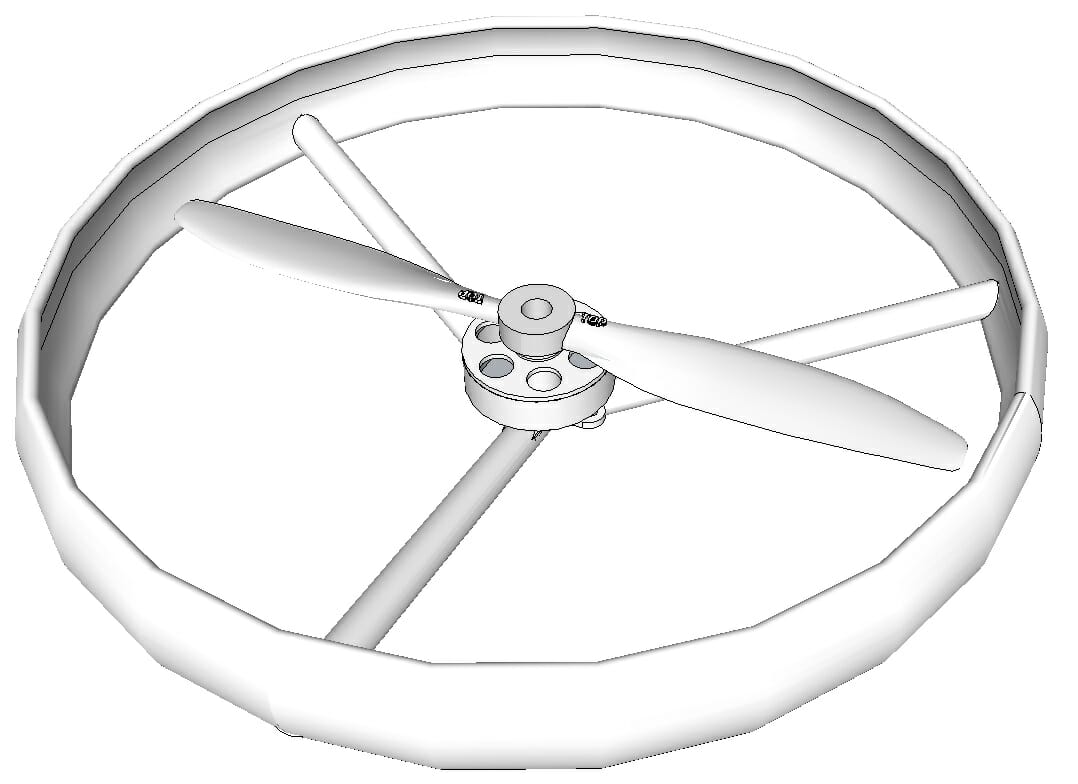
การป้องกันโรเตอร์
การป้องกันโรเตอร์ - ออกแบบมาเพื่อแยกการสัมผัสโดยตรงของโรงไฟฟ้า UAV กับวัตถุที่กำลังมาถึง เพื่อรักษาความสมบูรณ์และความสามารถในการใช้งาน เพื่อป้องกันการบาดเจ็บ o ใบพัดหมุนเร็วเนื่องจากการชนกับคนและสัตว์ ตัวป้องกันใบพัดติดอยู่กับโครงหลัก ขึ้นอยู่กับรุ่น มันสามารถทับซ้อนกันบางส่วนของพื้นที่ทำงานของโรงไฟฟ้าหรือทั้งหมด (ป้องกันวงแหวน) การป้องกันใบพัดมักใช้กับ UAV ขนาดเล็ก (ของเล่น) การใช้องค์ประกอบป้องกันในการประกอบยังทำให้เกิดการประนีประนอมหลายประการ รวมถึง:
- อาจทำให้เกิดการสั่นสะเทือนมากเกินไป
- โดยทั่วไปทนต่อการพัดเบาๆ
- อาจลดแรงขับถ้าวางขายึดไว้ใต้ใบพัดมากเกินไป
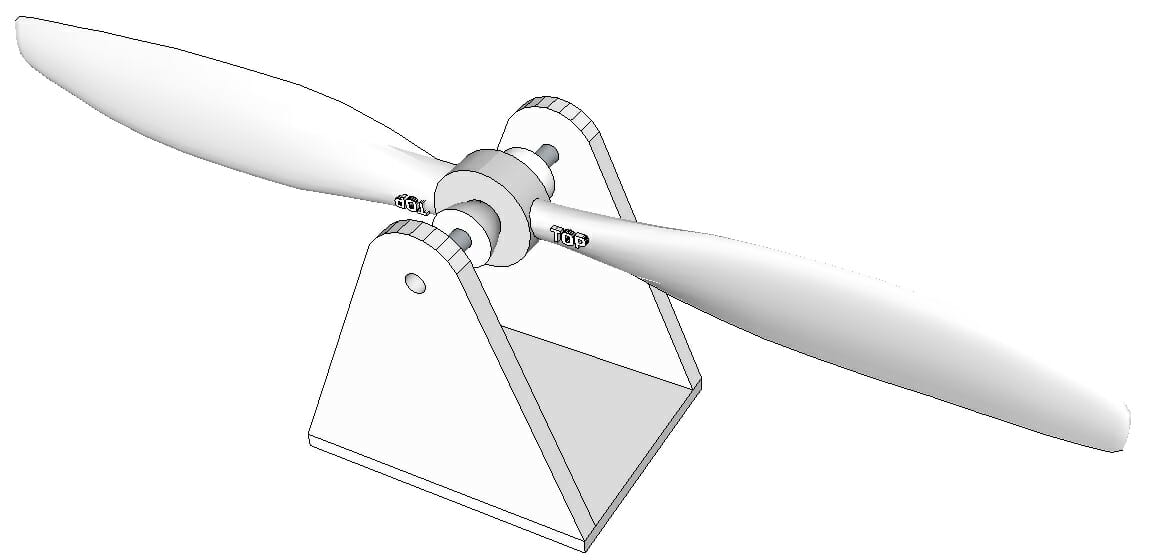
การทรงตัว
การทรงตัวที่ไม่ดีเกิดขึ้นกับใบพัดที่ราคาไม่แพงที่สุด เพื่อให้แน่ใจว่าสิ่งนี้ คุณไม่จำเป็นต้องไปไกล แค่สอดดินสอเข้าไปที่รูตรงกลางของสกรู (โดยปกติ ด้านหนึ่งจะหนักกว่าอีกด้านหนึ่ง หากไม่สมดุล) ดังนั้นจึงขอแนะนำอย่างยิ่งให้ปรับสมดุลอุปกรณ์ประกอบฉากของคุณก่อนที่จะติดตั้งบนมอเตอร์ ใบพัดที่ไม่สมดุลจะทำให้เกิดการสั่นสะเทือนมากเกินไป ซึ่งจะส่งผลเสียต่อประสิทธิภาพของผู้ควบคุมการบิน (แสดงออกมาในพฤติกรรมที่ไม่ถูกต้องของโดรนขณะบิน) ยังไม่รวมถึงเสียงที่เพิ่มขึ้น การสึกหรอที่เพิ่มขึ้นขององค์ประกอบของโรงไฟฟ้า และการเสื่อมสภาพใน คุณภาพของการถ่ายภาพกล้องที่ถูกระงับ
ใบพัดสามารถถ่วงดุล ได้หลายวิธี แต่ถ้าคุณสร้างเสียงพึมพำตั้งแต่เริ่มต้น ในคลังแสงของเครื่องมือจะต้องมี บาลานเซอร์ใบพัดราคาถูกที่ให้คุณตรวจสอบความไม่สมดุลของน้ำหนักในใบพัดได้อย่างง่ายดายและง่ายดาย ในการทำให้น้ำหนักเท่ากัน คุณสามารถบดส่วนที่หนักที่สุดของเสาได้ (ส่วนตรงกลางของใบมีดถูกขัดให้สม่ำเสมอ และไม่ว่าในกรณีใดให้ตัดส่วนใบพัดออก) คุณยังสามารถปรับสมดุลด้วยการติดเทป (บาง) บนใบมีดที่เบากว่า (เพิ่มส่วนเท่า ๆ กันจนกว่าจะถึงความสมดุล) โปรดทราบว่ายิ่งคุณทำการอัพเกรดใบพัดที่สมดุล (ขัดหรือเพิ่มสายพาน) จากจุดศูนย์กลางมากเท่าไร ผลกระทบจากหลักการของแรงบิดก็จะยิ่งมากขึ้นเท่านั้น
3. ESC
ESC (ตัวควบคุมความเร็วอิเล็กทรอนิกส์ภาษาอังกฤษ; rus.ตัวควบคุมความเร็วแบบอิเล็กทรอนิกส์) - ช่วยให้ตัวควบคุมการบินสามารถควบคุมความเร็วและทิศทางของมอเตอร์ได้ ด้วยแรงดันไฟฟ้าที่ถูกต้อง ESC จะต้องสามารถทนต่อค่าสูงสุดได้ กระแสที่มอเตอร์สามารถกินได้ และยังจำกัดกระแสที่ไหลผ่านเฟสในระหว่างการเปลี่ยน ESC งานอดิเรกของโดรนส่วนใหญ่อนุญาตให้มอเตอร์หมุนได้ในทิศทางเดียวเท่านั้น อย่างไรก็ตาม ด้วยเฟิร์มแวร์ที่ถูกต้อง พวกมันสามารถทำงานได้ทั้งสองทิศทาง
การเชื่อมต่อ
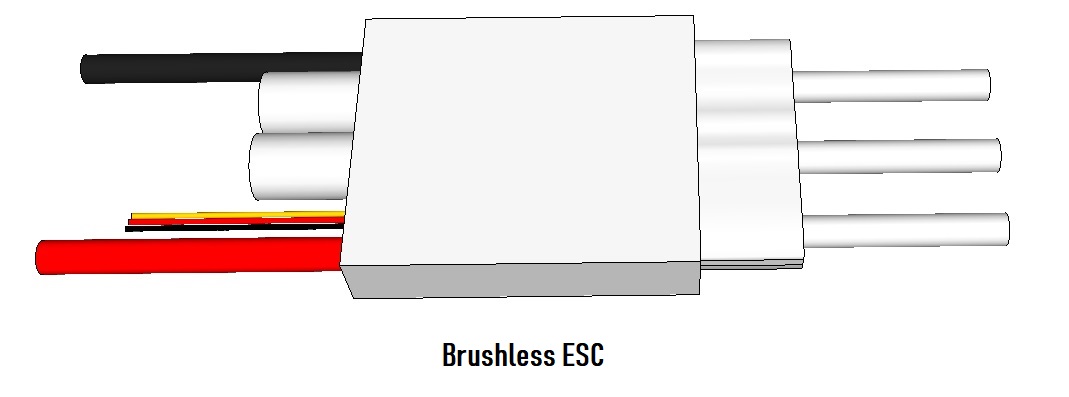
เริ่มแรก ESC อาจสร้างความสับสนได้เนื่องจากมีสายไฟ / หมุด / คอนเนคเตอร์หลายเส้นสำหรับเชื่อมต่อ สอง ด้านข้าง (ESC สามารถมีหรือไม่มีขั้วต่อแบบบัดกรี)
- พาวเวอร์ซัพพลาย: สายไฟหนาสองเส้น (โดยปกติคือสีดำและสีแดง) มีไว้เพื่อจ่ายพลังงานจากแผงจ่ายไฟ / สายรัดที่ส่งพลังงานโดยตรงจากแบตเตอรี่หลักของเครื่องบิน
- 3 คอนเน็กเตอร์: มีคอนเน็กเตอร์สามตัวที่ฝั่งตรงข้ามของคอนโทรลเลอร์สำหรับเชื่อมต่อกับคอนเน็กเตอร์สัญลักษณ์แสดงหัวข้อย่อยสามตัว (โดยปกติจะมาพร้อมกับมอเตอร์) บนมอเตอร์แบบไม่มีแปรง การใช้ขั้วต่อเมื่อเชื่อมต่อ ESC ช่วยให้สามารถเปลี่ยนตัวควบคุมได้อย่างรวดเร็วโดยไม่ต้องใช้หัวแร้งหากจำเป็น (ในกรณีที่เกิดความล้มเหลว) มันเกิดขึ้นที่คอนเนคเตอร์รูปกระสุนที่มาพร้อมกับมอเตอร์ไม่ตรงกับคอนเนคเตอร์บนเรกูเลเตอร์ ในกรณีนี้ ให้แทนที่ด้วยคอนเน็กเตอร์ที่เหมาะสม อันไหนเป็น "บวก" อันไหนเป็น "ลบ" จุดอ้างอิงเป็นลวดบวกธรรมดาที่มาจากแบตเตอรี่ เข้าสู่ค่าบวกบน ESC เช่นเดียวกับค่าลบ
- คอนเน็กเตอร์เซอร์โว R / C แบบ 3 พินพร้อมสายไฟเส้นเล็ก: ซึ่งสัญญาณที่มาจากเครื่องรับจะถูกประมวลผล โดยมีสายสัญญาณหนึ่งเส้น (การส่งสัญญาณก๊าซไปยัง ESC หรืออินพุต) "ลบ" ที่สอง (หรือกราวด์) และสายบวก (ไม่ใช้หากไม่มี BEC ในตัว; ด้วย BEC ในตัวจะเป็นเอาต์พุตกำลัง 5V ซึ่งสามารถใช้เป็นพลังงานได้ในภายหลัง อิเล็กทรอนิกส์ออนบอร์ด)
บีอีซี
ในยุคแรก ๆ ของการสร้างแบบจำลองเครื่องบิน เครื่องยนต์สันดาปภายในถูกใช้เป็นโรงไฟฟ้า และอุปกรณ์อิเล็กทรอนิกส์ออนบอร์ดขับเคลื่อนด้วยเครื่องยนต์ขนาดเล็ก แบตเตอรี่. ด้วยการถือกำเนิดของแรงฉุดไฟฟ้าและตัวควบคุม (ESC) ในระยะหลังพวกเขาเริ่มรวมวงจรการกำจัดแบตเตอรี่ที่เรียกว่า - BEC (ในภาษาอังกฤษวงจรกำจัดแบตเตอรี่หรือตัวแปลงพลังงานออนบอร์ดตามกฎแล้วจะให้ แหล่งจ่ายกระแสไฟเพิ่มเติมที่มีแรงดันไฟ 5V ที่กระแส 1A หรือสูงกว่า) กล่าวอีกนัยหนึ่ง มันคือตัวแปลงแรงดันไฟฟ้าที่ใช้ในการประกอบ LiPo เป็นแรงดันไฟฟ้าเพื่อจ่ายพลังงานให้กับอุปกรณ์อิเล็กทรอนิกส์ออนบอร์ดของโดรน
เมื่อประกอบมัลติโรเตอร์ ESC ทั้งหมดจะต้องเชื่อมต่อกับตัวควบคุมการบิน แต่ต้องใช้ BEC เพียงอันเดียว มิฉะนั้น ปัญหาอาจเกิดขึ้นเมื่อจ่ายไฟให้กับสายเดียวกัน เนื่องจากโดยปกติไม่มีทางที่จะปิดการใช้งาน BEC บน ESC ได้ ทางที่ดีควรเอาสายสีแดง () ออกแล้วพันด้วยเทปไฟฟ้าสำหรับทุกคนยกเว้น ESC หนึ่งอันสิ่งสำคัญคือต้องทิ้งลวดสีดำ (กราวด์) ไว้สำหรับกราวด์ทั่วไป
เฟิร์มแวร์
ESC บางตัวในตลาดไม่เหมาะสำหรับการใช้งานแบบหลายโรเตอร์ สิ่งสำคัญคือต้องเข้าใจว่าก่อนการถือกำเนิดของ UAV แบบหลายเครื่องยนต์ มอเตอร์ไร้แปรงถ่านถูกใช้เป็นโรงไฟฟ้าสำหรับรถยนต์ เครื่องบิน และเฮลิคอปเตอร์ที่ควบคุมด้วยวิทยุเป็นหลัก ส่วนใหญ่ไม่ต้องการเวลาตอบสนองที่รวดเร็วหรืออัปเดต ESC ที่มีซอฟต์แวร์ฝังตัว SimonK หรือ BLHeli สามารถตอบสนองได้อย่างรวดเร็วต่อการเปลี่ยนแปลงที่เข้ามา ซึ่งโดยทั่วไปจะสร้างความแตกต่างระหว่างเที่ยวบินที่เสถียรหรือการชนกัน
การกระจายพลังงาน
เนื่องจาก ESC แต่ละตัวใช้พลังงานจากแบตเตอรี่หลัก ขั้วต่อแบตเตอรี่หลักจะต้องแบ่งออกเป็นสี่ ESC ทำได้โดยใช้ Power Distribution BoardPower Distribution HarnessDeans
4. แบตเตอรี่
เคมี
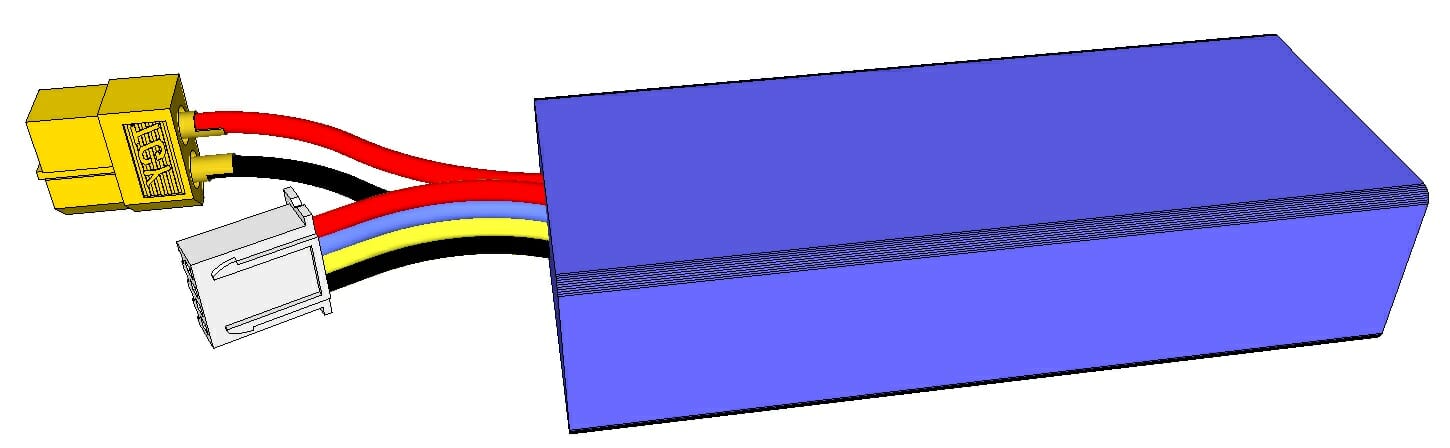
แบตเตอรี่ที่ใช้ในยานพาหนะไร้คนขับในปัจจุบันเป็นลิเธียมโพลิเมอร์ (LiPo) เท่านั้นและองค์ประกอบบางส่วนค่อนข้างแปลกใหม่ - ลิเธียมแมงกานีสหรือลิเธียมอื่น ๆ ตัวแปร กรดตะกั่วไม่เหมาะสมและ NiMh / NiCd ยังคงหนักเกินไปสำหรับความจุและมักจะไม่สามารถให้อัตราการปลดปล่อยที่สูงได้ตามต้องการ LiPo ให้ประสิทธิภาพสูงและอัตราการคายประจุที่มีน้ำหนักเบา ข้อเสียคือค่าใช้จ่ายค่อนข้างสูงและปัญหาด้านความปลอดภัยอย่างต่อเนื่อง (อันตรายจากไฟไหม้)
แรงดันไฟฟ้า
ในทางปฏิบัติ คุณต้องการแบตเตอรี่เพียงก้อนเดียวสำหรับ UAV ของคุณ แรงดันไฟฟ้าของแบตเตอรี่นี้ต้องตรงกับมอเตอร์ BK ที่คุณเลือก แบตเตอรี่เกือบทั้งหมดที่ใช้ในปัจจุบันนี้ใช้ลิเธียมและประกอบด้วยหลายเซลล์ (กระป๋อง) แต่ละก้อนที่ 3.7V โดยที่ 3.7V = 1S (เช่น แบตเตอรี่หนึ่งกระป๋อง 2S คือสองกระป๋อง เป็นต้น) ดังนั้นแบตเตอรี่ที่ติดฉลาก 4S มักจะมีค่าเล็กน้อยที่ 4 × 3.7V = 14.8V นอกจากนี้ จำนวนกระป๋องยังช่วยให้คุณกำหนดได้ว่าจะใช้ที่ชาร์จแบบใด โปรดทราบว่าแบตเตอรี่เซลล์เดียวความจุสูงอาจดูเหมือนแบตเตอรี่หลายเซลล์ความจุต่ำ
ความจุ
ความจุแบตเตอรี่วัดเป็นแอมแปร์-ชั่วโมง (Ah)แบตเตอรี่ขนาดเล็กสามารถมีความจุ 0.1Ah (100mAh) ความจุแบตเตอรี่สำหรับโดรนขนาดกลางสามารถอยู่ในช่วง 2-3Ah (2000mAh - 3000mAh) ยิ่งความจุสูง เวลาบินนานขึ้น และทำให้แบตเตอรี่มีน้ำหนักมากขึ้น เวลาบินของ UAV ทั่วไปอาจอยู่ในช่วง 10-20 นาที ซึ่งอาจดูเหมือนอายุสั้น แต่คุณควรเข้าใจว่าเสียงหึ่งๆ ต่อสู้กับแรงโน้มถ่วงอยู่ตลอดเวลาระหว่างการบิน และไม่มีพื้นผิวต่างจากเครื่องบิน (ปีก) ที่ให้ความช่วยเหลือในรูปแบบแรงยกที่เหมาะสมที่สุด
อัตราการคายประจุ
อัตราการคายประจุแบตเตอรี่ลิเธียมจะวัดเป็น "C" โดยที่ 1C คือความจุของแบตเตอรี่ ปาล์ม). อัตราการคายประจุของแบตเตอรี่ LiPo ส่วนใหญ่มีอย่างน้อย 5C (ห้าเท่าของความจุ) แต่เนื่องจากมอเตอร์ส่วนใหญ่ที่ใช้ใน UAV แบบหลายใบพัดกินกระแสไฟมาก แบตเตอรี่จะต้องสามารถปล่อยกระแสไฟได้สูงอย่างไม่น่าเชื่อ ซึ่งโดยปกติ ประมาณ 30A หรือมากกว่า
ความปลอดภัย
แบตเตอรี่ LiPo ไม่ปลอดภัยทั้งหมดเนื่องจากมีก๊าซไฮโดรเจนที่มีแรงดันและมีแนวโน้มที่จะ ไหม้และ / หรือระเบิด เมื่อ มีบางอย่างผิดปกติ ดังนั้น หากคุณมีข้อสงสัยใดๆ เกี่ยวกับสุขภาพของแบตเตอรี่ อย่าเชื่อมต่อกับโดรนหรือแม้แต่เครื่องชาร์จ ให้พิจารณาว่า "เลิกใช้งานแล้ว" และกำจัดทิ้งอย่างเหมาะสม สัญญาณที่บ่งบอกว่ามีบางอย่างผิดปกติกับแบตเตอรี่คือรอยบุบหรือบวม (เช่น แก๊สรั่ว) เมื่อทำการชาร์จแบตเตอรี่ LiPo ควรใช้กล่อง LiPo ที่ปลอดภัย LiPo (กล่องนิรภัยสำหรับแบตเตอรี่) การจัดเก็บแบตเตอรี่

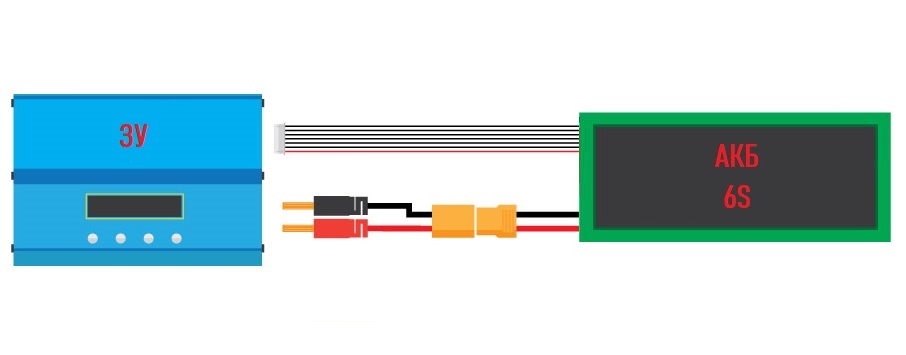
กำลังชาร์จ
แบตเตอรี่ LiPo ส่วนใหญ่มี ตัวเชื่อมต่อสองตัวเครื่องชาร์จข้อกังวลด้านความปลอดภัยที่เกี่ยวข้องกับแบตเตอรี่ลิเธียมโพลิเมอร์
การติดตั้ง
แบตเตอรี่เป็นองค์ประกอบที่หนักที่สุดของโดรน ดังนั้นควรติดตั้งที่ศูนย์ตายตรงกลางเพื่อให้แน่ใจว่า โหลดเท่ากันกับมอเตอร์ แบตเตอรี่ไม่เกี่ยวข้องกับการติดตั้งแบบพิเศษใดๆ (โดยเฉพาะสกรูเกลียวปล่อยที่อาจทำให้ LiPo เสียหายและทำให้เกิดไฟไหม้) ดังนั้นวิธีการติดตั้งบางอย่างที่ใช้กันในปัจจุบัน ได้แก่ สายรัดเวลโคร ยาง ช่องใส่พลาสติก และอื่นๆ ตัวเลือกการติดตั้งแบตเตอรี่ที่พบบ่อยที่สุดคือการแขวนแบตเตอรี่ไว้ใต้โครงโดยใช้สายรัดเวลโคร
.







