Kandungan
- drone DIY: Pelajaran 1. Terminologi.
- Drone buat sendiri: Pelajaran 2. Bingkai.
- drone buatan sendiri: Pelajaran 3. Loji janakuasa.
- drone buatan sendiri: Pelajaran 4. Pengawal penerbangan.
- Drone buat sendiri: Pelajaran 5. Perhimpunan.
- Drone buat sendiri: Pelajaran 6. Pemeriksaan prestasi.
- Drone buat sendiri: Pelajaran 7. FPV dan jarak.
- Drone dengan tangan anda sendiri: Pelajaran 8. Kapal terbang.
Pengenalan
Setelah anda memilih semua komponen utama untuk UAV anda, anda boleh mula memasang. Panduan ini akan merangkumi kesilapan biasa semasa memasang UAV multi-rotor, bersama dengan beberapa petua untuk menala. Pelajaran ini tidak akan merangkumi item seperti kamera / sistem FPV, peranti jarak jauh atau aksesori lain (kita akan bahas dalam 7 pelajaran).
Komponen yang mesti anda miliki pada tahap ini:
- Bingkai (dibeli atau buatan tangan)
- Motor, ESC, baling-baling, bateri, peranti pengecas
- Papan pengagihan kuasa / abah-abah
- Pengawal penerbangan dan alat komunikasi (kawalan radio dicadangkan)

Dorongan
Untuk mencapai objektif pelajaran ini, sistem pendorong UAV anda akan merangkumi komponen berikut:
- Motor
- ESC
- Pembahagian Kuasa (papan atau tali pinggang)
- Baterai
- Pengawal Penerbangan
Perhatikan bahawa baling-baling tidak disenaraikan. Jangan pasangkan baling-baling pada peringkat ini! Skru utama hanya akan disambungkan pada pelajaran ke-6. Oleh kerana ini adalah drone pertama anda, kami mengesyorkan membuat sambungan elektrik "tanpa bingkai" sebelum memasang semuanya pada bingkai; untuk memeriksa semua sambungan dan menghilangkan kesalahan yang dikenal pasti.
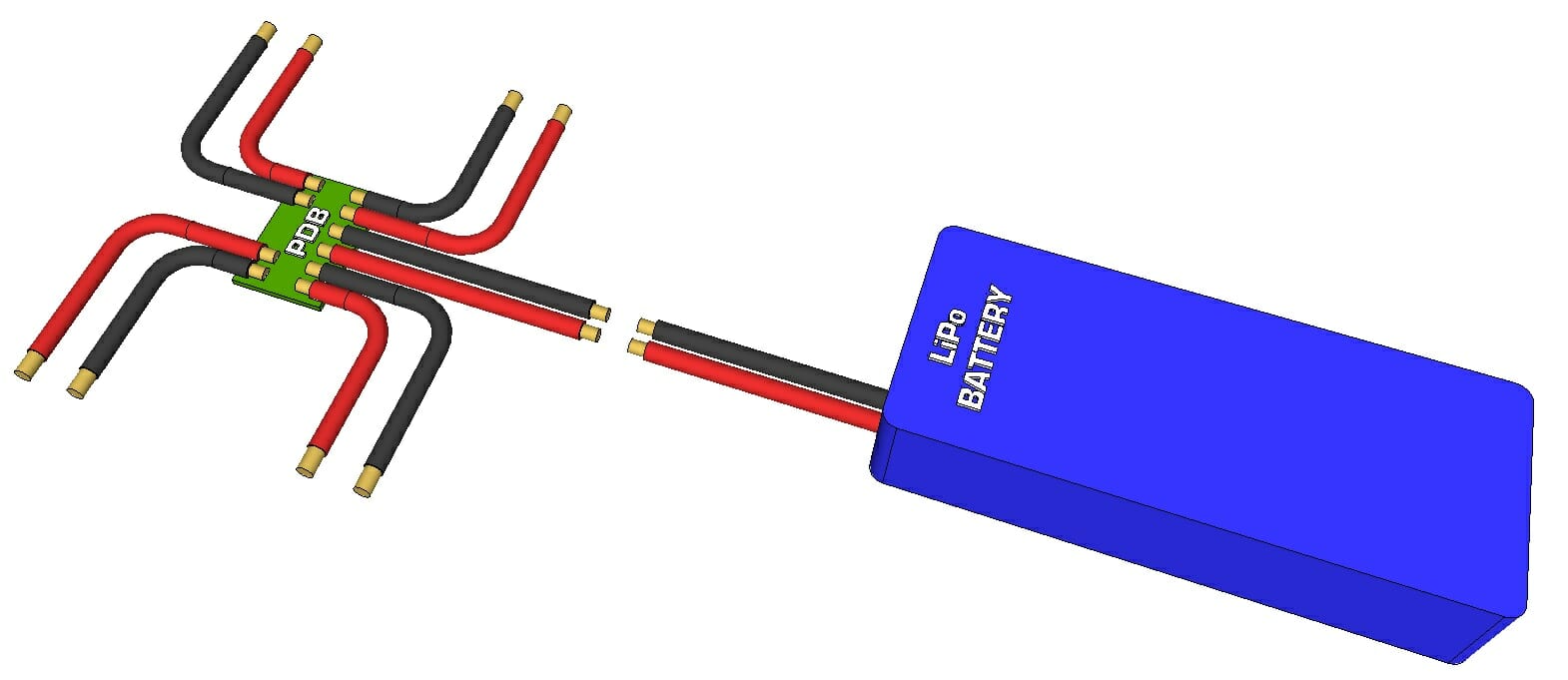
Bateri. Pembahagian Daya
Sambungan antara bateri dan sistem pengagihan kuasa mestilah agak mudah jika kedua-duanya mempunyai jenis penyambung yang sama. Sekiranya demikian, teruskan ke langkah seterusnya. Sekiranya penyambungnya berbeza, jangan sesekali memotong wayar bateri untuk memisahkan penyambung; ini boleh menyebabkan litar pintas dan kejutan elektrik yang tidak menyenangkan! Sebagai gantinya, anda boleh mengambil penyesuai dan menggunakannya antara penyambung pada bateri dan penyambung pada papan agihan kuasa. Pilihan lain mungkin ialah mencari penyambung kawin ke penyambung bateri, dan membelinya; kemudian potong penyambung yang ada dari pengedar kuasa dan solder pengganti yang dibeli, pastikan terlebih dahulu bahawa tidak ada hubungan antara pin positif dan negatif.
Penting untuk diperhatikan bahawa kebanyakan UAV multi-rotor tidak mempunyai suis hidup / mati, jadi kuasa dibekalkan dan diputuskan dengan menyambungkan dan melepaskan bateri utama dari penyambung pengedar kuasa, jadi penyambungnya mestilah diikat dengan selamat dan wayar / titik pateri dilindungi dengan baik dengan tiub penyusutan haba dan / atau pita elektrik.
Putuskan bateri dari pengedar kuasa sebelum meneruskan.
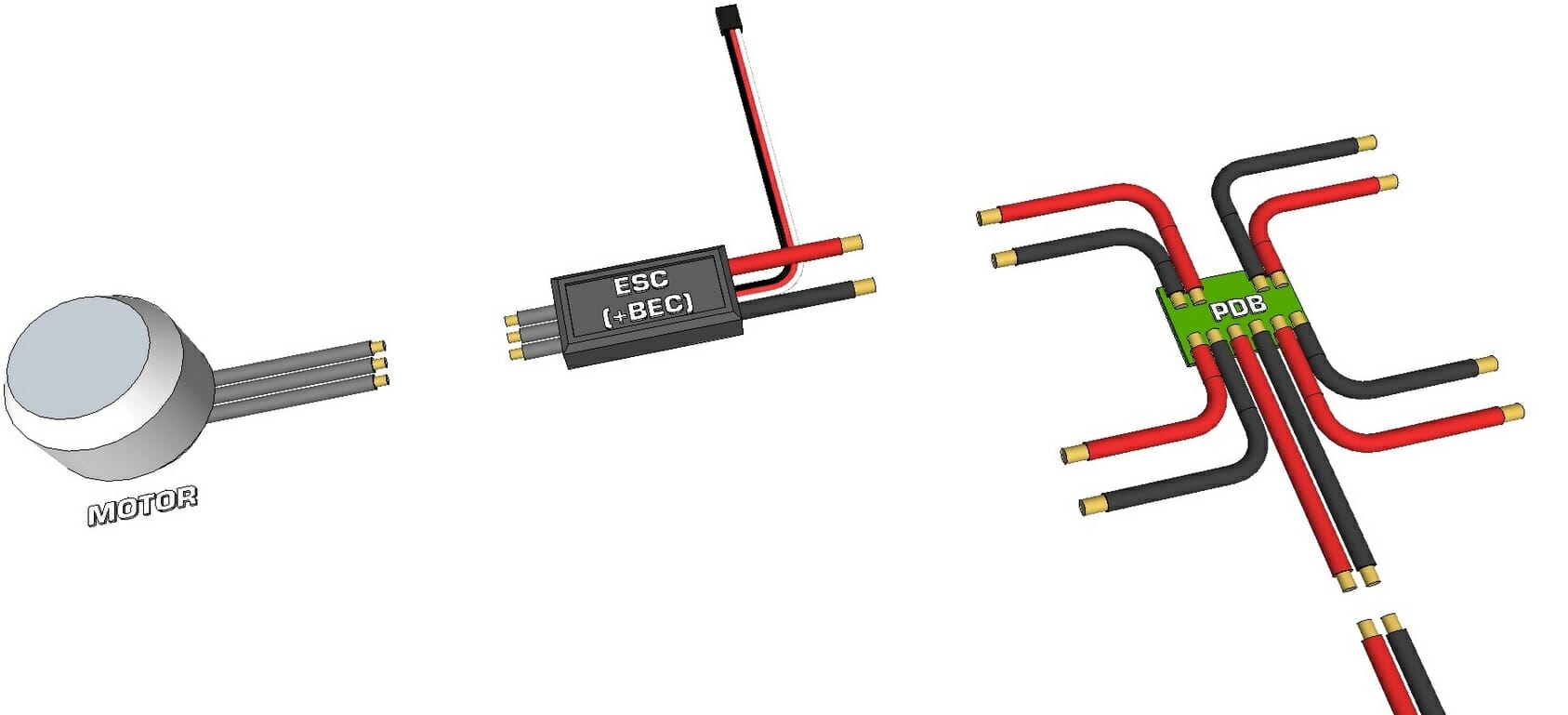
Motor. ESC. Pembahagian Kuasa
Papan Pengagihan Kuasa (PDP) atau pengedaran berwayar berfungsi untuk mengagihkan kuasa dari bateri utama ke setiap ESC. Voltan dibekalkan ke ESC sebagaimana adanya, jadi tidak perlu menambah (menambah) atau menurunkan (menurunkan) voltan. Sekiranya drone anda mempunyai empat motor, maka anda seharusnya mempunyai empat ESC, dan oleh itu papan edaran / pengedaran wayar anda akhirnya akan membahagikan bateri utama menjadi empat sambungan. Sekiranya PRP anda mempunyai enam sambungan, dan anda membina sebuah quadrocopter, maka anda tidak perlu menghubungkan dua yang terakhir. Sekiranya anda membina hexacopter, PDP anda harus mengagihkan kuasa dari bateri utama ke enam sambungan. ESC merangkumi kabel berikut:
- Satu pita 3-wayar 0.1-inci dengan penyambung R / C, di mana pin hitam biasanya dibumikan, yang merah memberikan output 5V (melalui BEC*) dan kuning / putih adalah input isyarat.
- Tiga wayar berasingan menyambung ke tiga wayar pada motor DC tanpa berus (biasanya dibekalkan dengan penyambung peluru wanita yang sudah disolder atau disertakan).
- Dua penyambung input untuk menyambungkan bateri ke PDB (ada yang merangkumi penyambung yang disolder dengan pematerian, ada yang disertakan, dan kadang-kadang tidak sama sekali).
*ESC biasanya mempunyai Circuit Eliminate Battery (atau BEC) bawaan yang menukar voltan bateri utama menjadi 5V untuk memberi kuasa kepada penerima dan pengawal penerbangan. 5V biasanya dibekalkan melalui penyambung RC dari ESC (biasanya pin tengah / merah). Anda hanya memerlukan satu BEC untuk menghidupkan pengawal penerbangan.
Sekiranya papan agihan kuasa menggunakan penyambung yang tidak sepadan dengan penyambung pada ESC atau bateri, maka anda perlu membeli penyesuai atau membeli penyambung baru dan menggantinya pada ESC atau PRP. Kelebihannya tetap ada pada papan agihan kuasa, penyambung yang sepadan dengan bateri dan ESC. Selalunya, bateri polimer litium UAV boleh mempunyai penyambung DEANSXT60EC3
Jika anda ingin menghidupkan elektronik arus rendah tambahan (pencahayaan LED, loket, dll.) Tetapi tidak ada sambungan ganti pada papan agihan kuasa anda, anda boleh menggunakan kabel pengecasan bateri. Penyambung pengecasan putih biasanya mempunyai satu pin untuk tanah dan satu pin untuk setiap sel (1S, 2S, 3S, dll.) Yang digunakan dalam unit bateri LiPo. Walaupun penyambung ini benar-benar hanya untuk mengecas bateri, ia dapat memberikan voltan keluaran 3.7V dari setiap pin dan dapat digunakan untuk menghidupkan elektronik arus rendah seperti abah-abah atau LED.
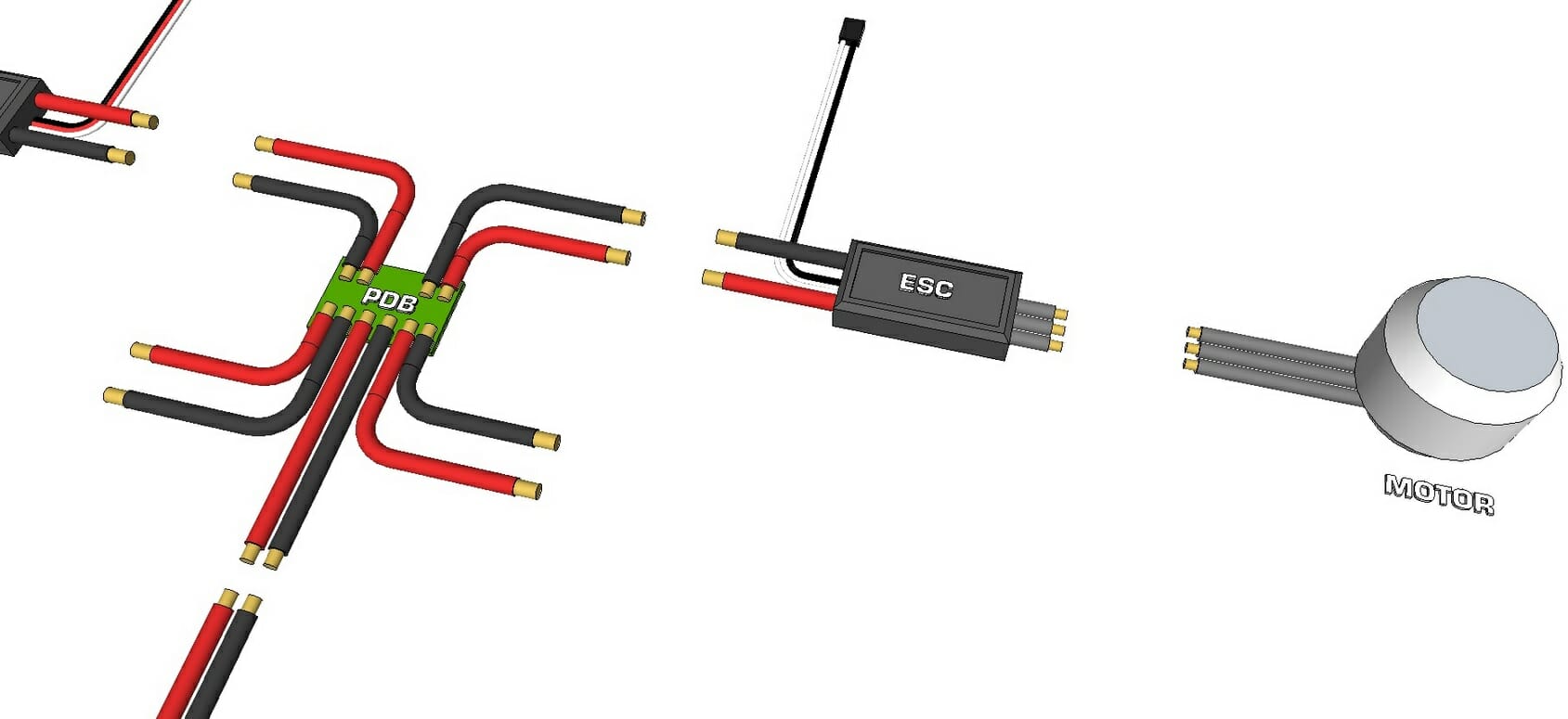
- Tanggalkan plumbum merah dari setiap penyambung R / C 3-pin kawalan pelayaran kecuali satu. Dianjurkan agar anda melakukan ini sedemikian rupa sehingga anda selalu dapat memasangnya kembali jika perlu. Balut hujung setiap dawai yang dikecualikan dengan pita elektrik atau gunakan tiub penyusut haba untuk penebat sehingga kemudian mereka tidak dapat bersentuhan dengan elektronik lain. Satu-satunya wayar merah yang tidak tersentuh akan memberi kuasa kepada pengawal penerbangan yang digunakan dalam pemasangan.
- Sambungkan dua wayar bekalan setiap ESC ke papan pengedaran, pastikan wayar merah menuju positif () dan wayar hitam menjadi negatif (-).
- Sekiranya papan pengagihan kuasa yang anda gunakan mempunyai penyambung R / C sendiri, maka dalam hal ini terserah anda untuk menghubungkan pin R / C setiap ESC ke penyambung R / C di papan ini atau sambungkannya terus ke pengawal penerbangan.
- Sambungkan setiap tiga penyambung motor ke tiga penyambung ESC. Pada masa ini, susunan penyambung ini tidak penting (jika mempengaruhi arah putaran, ia akan diperbetulkan seperti yang diperlukan kemudian).
Harap perhatikan bahawa jika anda memutuskan untuk melepaskan atau menyembunyikan pendawaian pada tahap ini, Anda mungkin perlu mengakses beberapa sambungan sesuai dengan prosedur yang dijelaskan dalam Pelajaran 6, khususnya, menukar hubungan antara ESC dan motor sehingga motor berputar ke arah yang bertentangan.

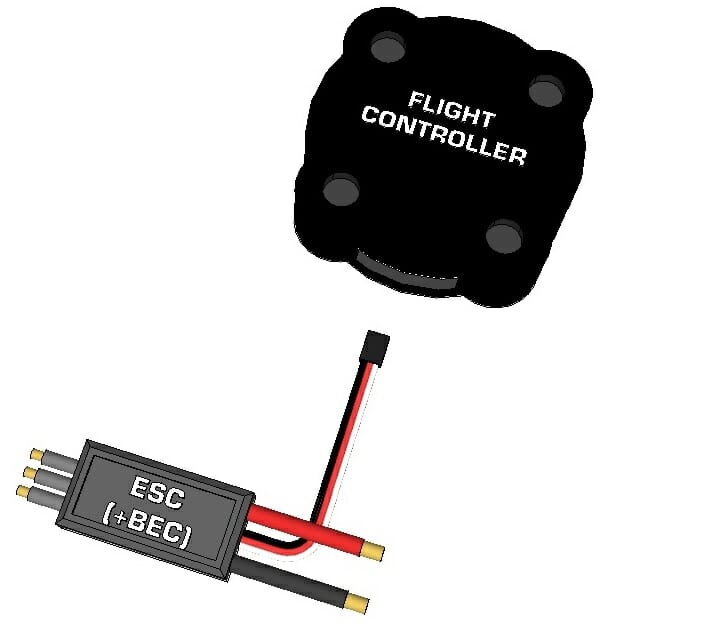
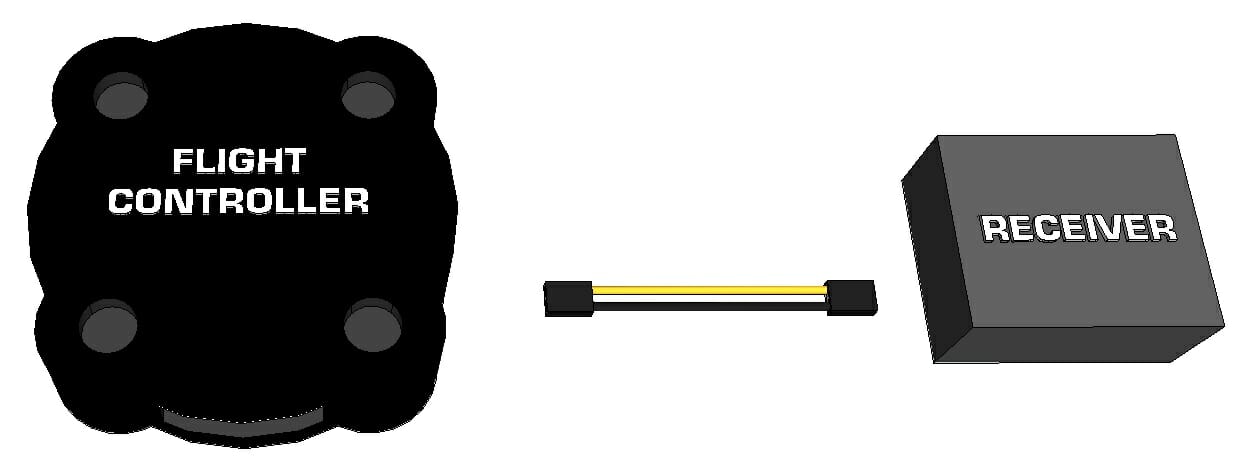
ESC. Pengawal penerbangan.
Anda kini boleh menyambungkan input R / C pengawal pelayaran ke pengawal penerbangan. Pengawal penerbangan yang anda pilih harus mempunyai gambarajah yang menunjukkan pin pengawal mana yang disambungkan ke motor pemasangan multi-rotor anda. Gambar rajah ini juga harus menunjukkan arah putaran setiap motor, tetapi sekali lagi, anda tidak perlu mempertimbangkan arah sekarang.
- Lihat rajah sambungan antara motor / ESC dan pengawal penerbangan dalam manual arahan PC.
- Sambungkan penyambung R / C setiap ESC ke pin yang sesuai pada pengawal penerbangan, pastikan wayar ground (biasanya hitam) menyambung ke pin ground pengawal penerbangan dan pin isyarat (putih atau kuning) menyambung ke pin isyarat pada pengawal penerbangan...
- Hanya satu daripada penyambung RC yang masih mempunyai pin merah (kuasa).
Komunikasi
Penerima. Pengawal penerbangan.
Andaikan dalam pelajaran ini anda telah membuat pilihan untuk memilih kawalan radio sebagai alat input. Sekiranya anda ingin menggunakan WiFi, Bluetooth atau kaedah input lain, baca manual pengawal penerbangan dan cari input bersiri; Bahagian ini akan menerangkan bagaimana / di mana untuk menyambungkan peranti input bersiri ke pengawal penerbangan. Anda kemungkinan besar perlu mencari dan menyambungkan pin transmit (Tx), menerima (Rx), voltan (5V), dan GND dari peranti wayarles ke pemancar, yang membolehkan Rx dari satu ke Tx yang lain, dan sebaliknya.
Pemancar RC anda mesti dilengkapi dengan penerima RC yang sesuai. Penerima mesti diikat pada pemancar sehingga anda dapat melepaskan jumper pengikat dari penerima (jika ada). Kit ini juga termasuk pemegang bateri AA, yang dirancang untuk memberi kuasa kepada penerima, tetapi kami tidak akan menggunakannya kerana BEC akan memberi kuasa kepada penerima dan pengawal penerbangan. Untuk mengetahui saluran penerima RC yang disambungkan ke pin mana di pengawal penerbangan, anda perlu melihat manual pengguna kedua-dua pengawal penerbangan dan sistem RC.
Manual pengendali penerbangan akan menunjukkan lokasi pin berikut yang akan dipadankan dan disambungkan ke penerima:
- Throttle
- Pitch
- Yaw
- Gulung
- Suis Aux 1, 2, 3, dll.
Anda kini boleh membuat sambungan berikut:
- Baca manual pengendali penerbangan untuk melihat pin input R / C mana yang disambungkan dengan fungsi di atas.
- Baca manual pemancar yang salurannya dikaitkan dengan setiap fungsi.
- Beberapa pemancar RC dapat diprogram ulang untuk mengubah fungsi setiap kontak. Sekiranya anda memutuskan untuk menukar input apa pun (joystick atau suis), lakukan hanya setelah memastikan anda mengetahui saluran mana pada penerima sesuai dengan fungsi mana. Throttle, Pitch, Yaw, and Roll harus selalu dikaitkan dengan dua tongkat / batang kayu, bukan suis atau butang.
- Sambungkan saluran Throttle pada penerima ke input Throttle pada pengawal penerbangan.
- Sambungkan saluran Pitch pada penerima ke input Pitch pada pengawal penerbangan.
- Sambungkan saluran Yaw pada penerima ke input Yaw pada pengawal penerbangan.
- Sambungkan GND pada pengawal penerbangan (biasanya pin ketiga pin) ke GND pada penerima (biasanya pin ketiga pin).
- Jika input tambahan akan digunakan, sambungkan Aux 1 pada penerima ke Aux 1 pada pengawal penerbangan, dan seterusnya.
Anda boleh menggunakan wayar servo 3 pin untuk setiap saluran, tetapi hanya satu saluran (boleh ada) yang mesti voltan dan arde; selebihnya hanya memerlukan wayar isyarat. Semua sambungan boleh dilakukan dari GND ke GND, walaupun hanya diperlukan satu. Sekali lagi, penerima tidak memerlukan bateri yang terpisah kerana ia akan dikuasakan oleh pengawal penerbangan, yang dikuasakan oleh BEC dari salah satu ESC.
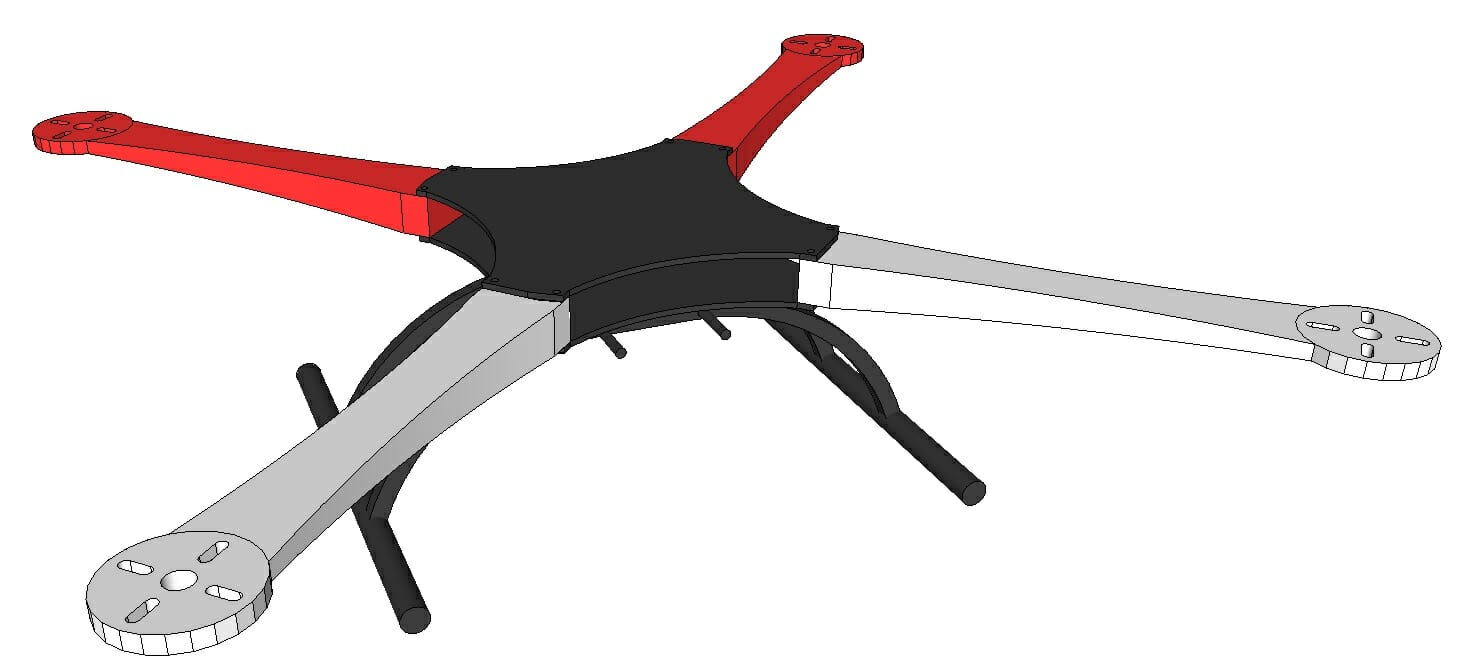
Pemasangan Bingkai
Jika anda membuat bingkai sendiri, anda dapat memasangnya pada tahap ini. Sekiranya anda membeli kit bingkai, ikuti arahan pemasangan. Harap maklum bahawa anda mungkin perlu membongkar kawasan tertentu untuk memudahkan penyambungan atau mengeluarkan (menyembunyikan) elemen elektrik. Tujuannya adalah untuk memastikan bahawa tidak ada yang longgar, semua wayar diikat dengan selamat, dan tidak ada yang boleh jatuh dari bingkai atau kusut.
Pemasangan
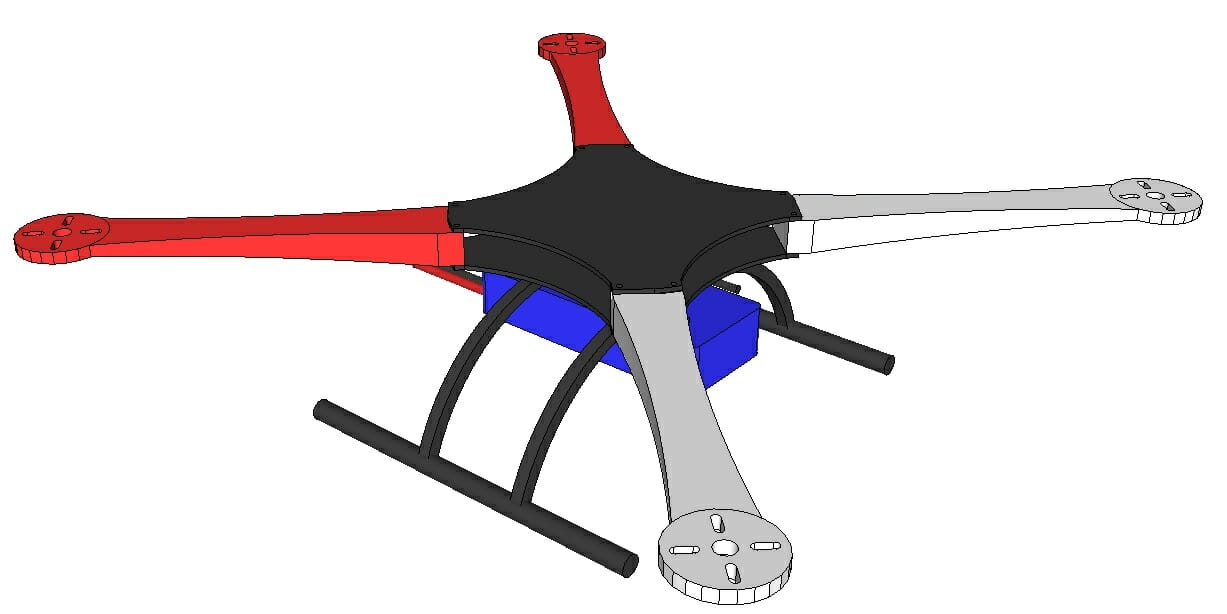
Lokasi bateri.
Baterai yang digunakan untuk kuasa sering merupakan elemen terberat pada UAV dan dapat berkisar antara 1/4 hingga 1/2 dari jumlah beratnya. Oleh itu, tempat pemasangannya sangat penting. Lokasi yang ideal untuk bateri utama harus berada di tengah-tengah pesawat supaya semua motor dapat menangani beban yang sama. Sekiranya bateri terletak lebih dekat ke belakang pesawat, motor belakang harus memberikan daya tuju lebih banyak daripada motor depan, dan oleh itu daya tuju total maksimum akan terhad (apabila motor belakang berada pada daya dorong penuh, tidak akan ada tujahan pada motor hadapan). Manakala, pendekatan yang biasa dalam reka bentuk multi-rotor adalah untuk menjaga pesawat simetri mengenai garis tengah (atau sekurang-kurangnya satu paksi), jadi bateri harus diletakkan di sepanjang garis tengah itu daripada diimbangi ke satu sisi atau yang lain...
Seterusnya, anda perlu memutuskan berapa ketinggian untuk meletakkan bateri. Terdapat beberapa tempat di mana bateri boleh dipasang:
- Di bawah kerangka (pesawat akan berat di bawahnya, lebih stabil dan kurang akrobatik).
- Secara langsung di bawah motor (biasanya di dalam bingkai); mungkin salah satu tempat terbaik.
- Pada ketinggian yang sama dengan mesin atau rotor (mis. Dipasang di atas bingkai).
- Di atas baling-baling (UAV akan lebih berat di atas dan lebih cenderung terbalik).
Untuk prestasi terbaik, sebaiknya bateri berada di kedudukan 3 di atas. Kedudukan 4 menimbulkan kesan pendulum terbalik, dan jika UAV memiringkan melebihi sudut tertentu, drone akan cenderung membalik. Kedudukan 1 akan mewujudkan platform yang cukup stabil yang secara semula jadi cenderung untuk tetap setingkat, tetapi sangat tidak sesuai untuk akrobatik. Oleh itu, kebanyakan pereka memilih kedudukan 2 dan meletakkan bateri sama ada tepat di bawah kerangka atau di dalamnya. Pendekatan ini membebaskan ruang di bawah bingkai untuk muatan seperti sistem penggantungan, dan ruang di atas untuk pengawal penerbangan dan elektronik lain agar dapat diakses semudah mungkin.
Pemasangan Baterai
Terdapat banyak cara biasa untuk memasang bateri ke bingkai, termasuk:
- Tali Velcro
- Velcro pelekat sendiri (satu sisi terpaku pada bateri dan yang lain ke bingkai)
- Di bingkai
Tali Velcro paling umum digunakan untuk media " drone khas bersaiz standard Walaupun penutup bingkai paling sering dijumpai pada drone komersial, bingkai UAV semacam itu disusun di bawah tekanan dan meninggalkan ruang di dalamnya khusus untuk bateri tertentu. Sebaiknya Velcro hanya boleh digunakan jika bateri agak ringan; bukannya satu bahagian pendek di bahagian tengah, disarankan untuk melekatkan satu jalur sepanjang panjang bateri. Sekiranya anda menggunakan tali Velcro dan mendapati bateri cenderung keluar kerana kekurangan cengkaman, disarankan agar anda menambah jalur getah di mana bateri menghubungi tali. Tidak digalakkan menggunakan gam untuk mengencangkan bateri ke bingkai. Sekiranya anda tidak menggunakan UAV, keluarkan bateri dan simpan di dalam beg selamat LiPo atau takungan seramik.
Mengecas bateri
Kemungkinan besar anda telah memilih Lithium Polymer (LiPo) atau bateri litium lain. Sebilangan besar bateri LiPo lebih dari 3.7V mempunyai kabel pengisian yang berasingan dengan penyambung multi-pin untuk pengisian, sementara kabel kuasa dapat dikenal pasti dengan adanya penyambung dua pin dengan wayar yang lebih besar yang mampu menahan arus pelepasan tinggi. Penyambung pengecasan biasanya mempunyai satu kenalan untuk setiap bank bateri, serta hubungan tanah biasa.
Oleh kerana bahaya yang berkaitan dengan bateri LiPo (hidrogen dan elektrik), adalah kebiasaan untuk mengeluarkan bateri sepenuhnya dari drone ketika tidak digunakan dan meletakkannya di dalam beg LiPo Safe. Beg yang sama digunakan semasa mengecas bateri (sambungkan bateri ke pengecas, letakkan bateri di dalam beg (tinggalkan pengecas di luar beg) dan tutup (biasanya mempunyai penutup Velcro).
.Penempatan dan Pemasangan Pengawal Penerbangan
Sebaik-baiknya, pengawal penerbangan harus terletak di tengah-tengah drone pada ketinggian yang sama dengan motor. Jika ini tidak mungkin, maka pengawal dapat ditempatkan sedikit lebih tinggi atau lebih rendah. arah ke kiri atau kanan, dan elakkan memasangnya ke hadapan atau ke belakang. Sekiranya anda membeli bingkai untuk UAV, maka ini sering kali mempunyai lubang pemasangan untuk pengawal penerbangan, yang berada di tempat yang optimum. pengawal boleh diperbaiki dengan salah satu cara asas berikut:
- Skru / Mur / Penutup (asas)
- Pita dua sisi (pastikan ia cukup kuat)
- Pita busa dua sisi (untuk dicapai kesan redaman)
- Bushing redaman getah (untuk redaman tinggi)
Beberapa pengendali penerbangan mempunyai atau mungkin mempunyai pelindung pilihan.
Pada tahap ini, anda harus mempunyai UAV yang dipasang dan disambungkan sepenuhnya, tidak termasuk baling-baling. Pelajaran 6 merangkumi penyediaan dan pengujian pemancar, perisian pengawal penerbangan, pemeriksaan pra-penerbangan dan penerbangan pertama.







