مطالب
مقدمه
اکنون که تمام اجزای اصلی پهپاد خود را انتخاب کرده اید ، می توانید مونتاژ را آغاز کنید. این راهنما اشتباهات متداول هنگام مونتاژ یک پهپاد چند روتور را همراه با برخی نکات مفید برای تنظیم پوشش می دهد. این درس مواردی مانند دوربین / سیستم FPV ، دستگاه های برد بلند یا سایر لوازم جانبی را پوشش نمی دهد (ما در 7 درس به آن خواهیم پرداخت).
قطعاتی که باید در این مرحله داشته باشید:
- قاب (خریداری یا دست ساز)
- موتورها ، ESC ها ، پروانه ها ، باتری ، دستگاه شارژر
- صفحه توزیع برق / مهار
- کنترل کننده پرواز و دستگاه ارتباطی (کنترل رادیویی پیشنهاد شده است)

پیشرانه
برای دستیابی به اهداف این درس ، پیشرانه پهپاد شما شامل اجزای زیر است:
- موتورها
- ESC
- توزیع نیرو (تخته یا مهار)
- باتری
- کنترل پرواز
توجه داشته باشید که پروانه ها در لیست نیستند. در این مرحله ملخ نصب نکنید! پیچ های اصلی فقط در درس ششم متصل می شوند. از آنجا که این اولین هواپیمای بدون سرنشین شما است ، توصیه می کنیم قبل از نصب همه چیز روی قاب ، یک اتصال الکتریکی بدون قاب ایجاد کنید. به منظور بررسی همه اتصالات و رفع خطاهای شناسایی شده.
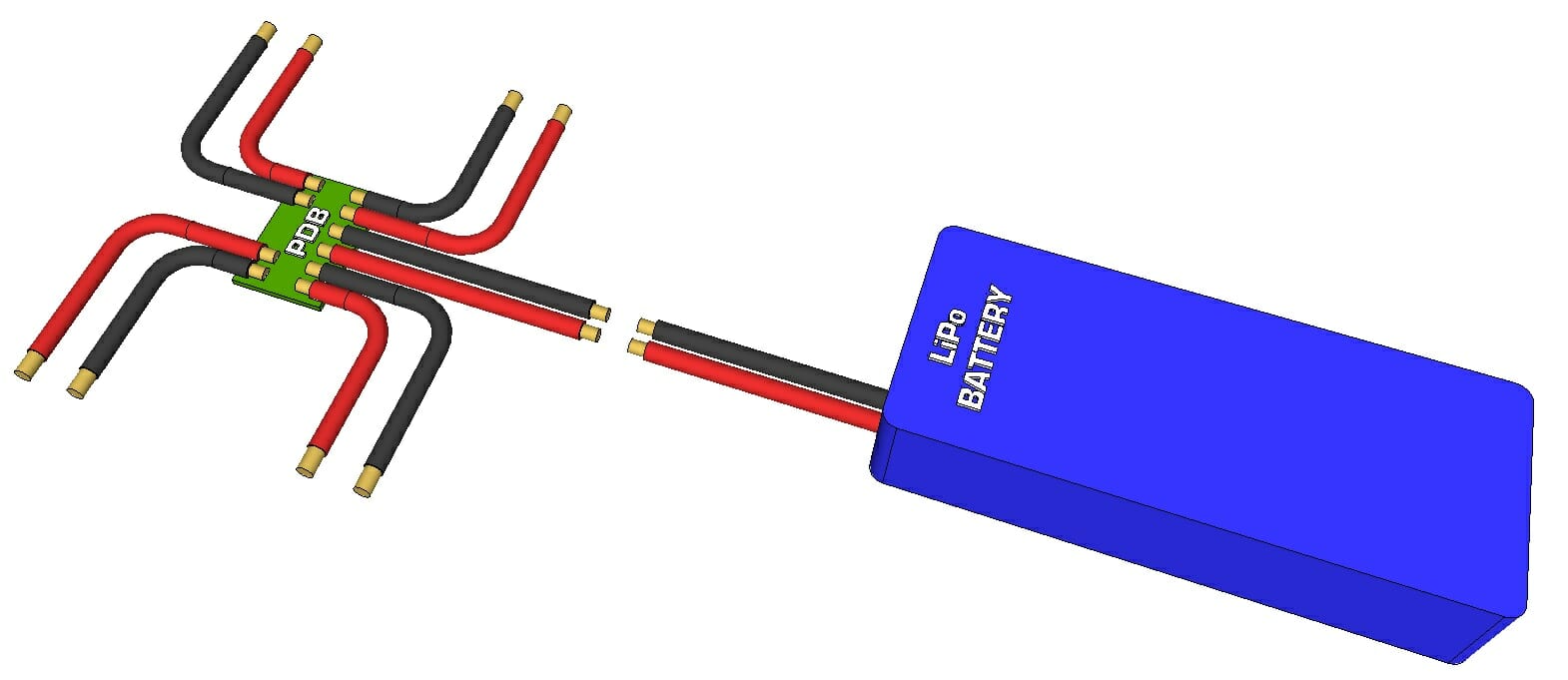
باتری. توزیع برق
اتصال بین باتری و سیستم توزیع برق در صورتی که هر دو نوع اتصال یکسانی داشته باشند باید نسبتاً ساده باشد. اگر چنین است ، سپس به مرحله بعدی بروید. اگر اتصالات متفاوت هستند ، به هیچ وجه سیم باتری را جدا نکنید تا اتصال را جدا کنید. این می تواند باعث اتصال کوتاه و برق گرفتگی ناخوشایند شود! در عوض ، می توانید یک آداپتور را برداشته و از اتصال بین باتری و کانکتور روی برد توزیع برق استفاده کنید. یکی دیگر از گزینه ها ممکن است جستجوی اتصال جفت گیری به کانکتور باتری و خرید آن باشد. سپس اتصال دهنده موجود را از توزیع کننده برق جدا کرده و جایگزین خریداری شده را لحیم کنید ، ابتدا مطمئن شوید که هیچ ارتباطی بین پین های مثبت و منفی وجود ندارد.
توجه به این نکته ضروری است که اکثر پهپادهای چند روتور دارای کلید روشن و خاموش نیستند ، بنابراین با اتصال و قطع باتری اصلی از کانکتور توزیع برق ، برق تأمین و قطع می شود ، بنابراین اتصالات آنها باید محکم محکم شده و سیمها / نقاط لحیم کاری با لوله کوچک کننده حرارتی و / یا نوار برقی خوب عایق بندی شده اند.
قبل از ادامه ، باتری را از توزیع کننده برق جدا کنید.
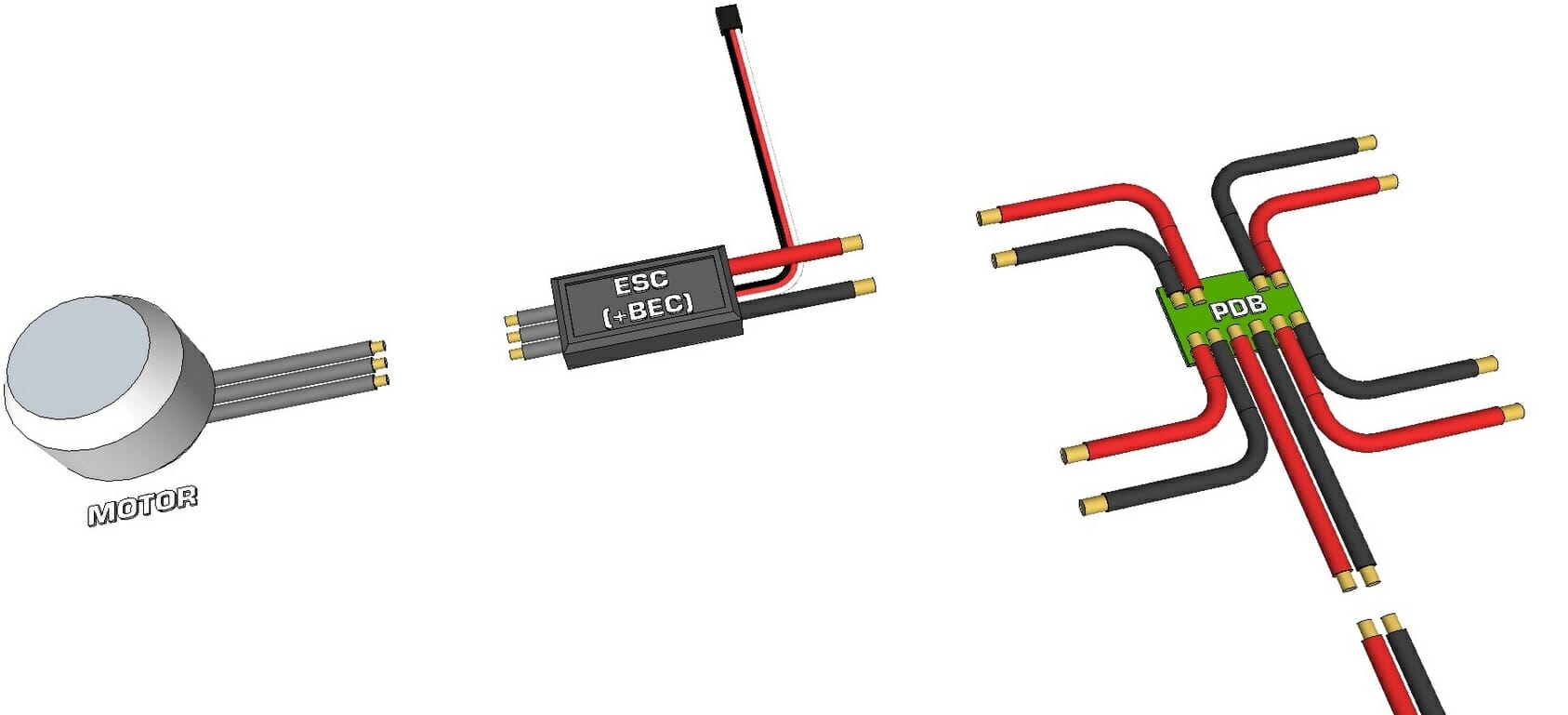
موتور. خروج. توزیع نیرو
برد توزیع برق (PDP) یا توزیع سیمی در درجه اول برای توزیع نیرو از باتری اصلی به هر ESC عمل می کند. ولتاژ همانطور که هست به ESC وصل می شود ، بنابراین نیازی به افزایش (افزایش) یا کاهش (کاهش) ولتاژ نیست. اگر هواپیمای بدون سرنشین شما دارای چهار موتور است ، باید چهار ESC داشته باشید و بنابراین صفحه توزیع / توزیع سیم شما در نهایت باید باتری اصلی را به چهار اتصال تقسیم کند. اگر PRP شما دارای شش اتصال است و شما در حال ساخت یک کوادکوپتر هستید ، به سادگی نیازی به اتصال دو مورد اخیر ندارید. اگر در حال ساخت هگزاکوپتر هستید ، PDP شما باید قدرت را از باتری اصلی به شش اتصال توزیع کند. ESC شامل سیمهای زیر است:
- یک روبان 3 سیم 0.1 اینچی با اتصال R / C ، که پین سیاه آن معمولاً زمین است ، قرمز رنگ خروجی 5 ولت (از طریق BEC*) و زرد / سفید ورودی سیگنال است.
- سه سیم جداگانه به سه سیم در موتور DC بدون برس متصل می شود (معمولاً با اتصالات گلوله زنانه که قبلاً لحیم شده یا موجود است).
- دو کانکتور ورودی برای اتصال باتری به PDB (برخی شامل کانکتورهای لحیم شده با لحیم کاری ، برخی از آنها گنجانده شده است ، و گاهی اوقات اصلاً وجود ندارد).
*ESC ها معمولاً دارای یک مدار حذف کننده باتری (یا BEC) هستند که ولتاژ اصلی باتری را به 5 ولت تبدیل می کند تا گیرنده و کنترل کننده پرواز را تغذیه کند. 5V معمولاً از طریق اتصال RC از ESC (معمولاً پین مرکزی / قرمز) تأمین می شود. برای تغذیه کنترل کننده پرواز فقط به یک BEC نیاز دارید.
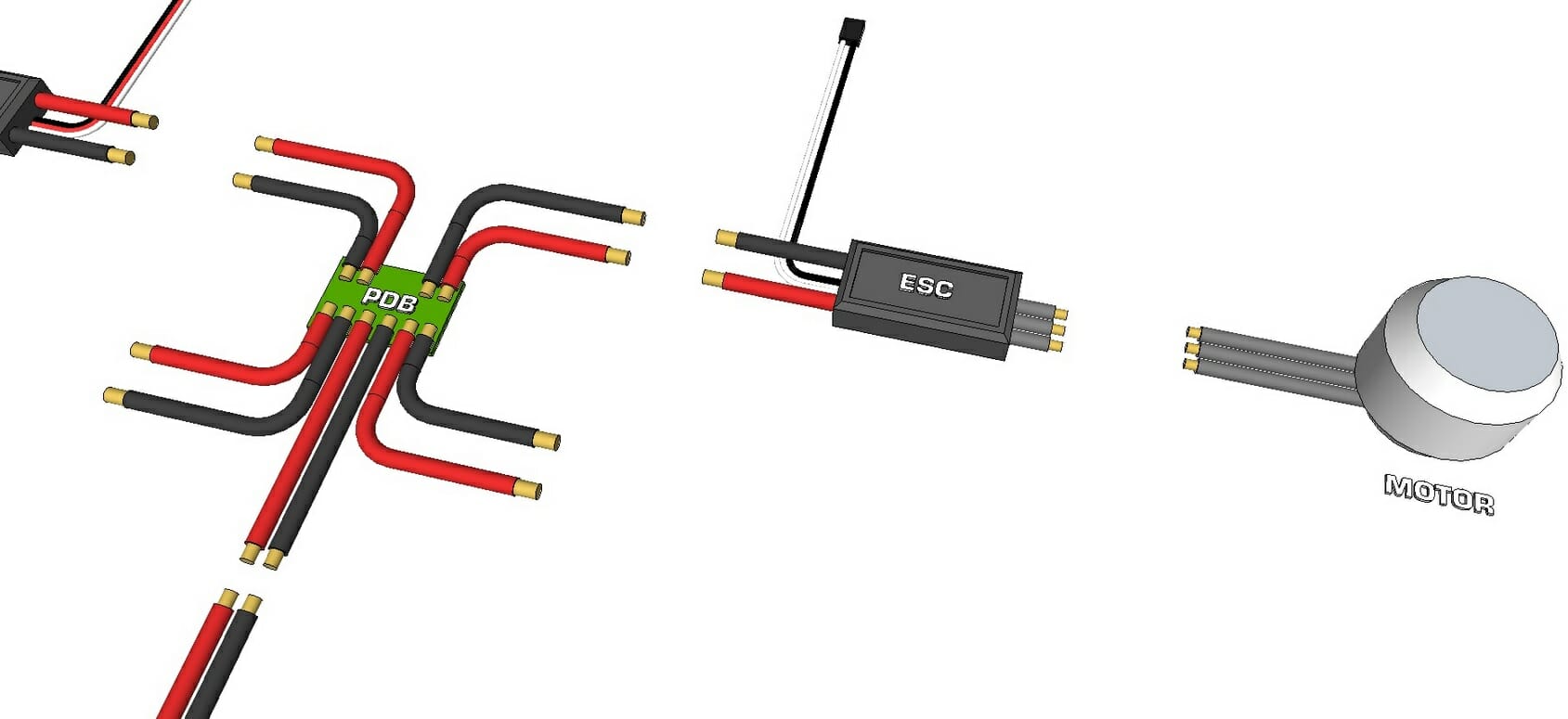
اگر برد توزیع برق از کانکتورهایی استفاده می کند که با کانکتورهای ESC یا باتری مطابقت ندارد ، باید یا آداپتور بخرید یا کانکتورهای جدید بخرید و آنها را جایگزین کنید ESC یا PRP مزیت با برد توزیع برق است که اتصالات آن با باتری و ESC مطابقت دارد. بیشتر اوقات ، یک باتری لیتیوم-پلیمری یک پهپاد می تواند دارای اتصال DEANSXT60EC3
اگر می خواهید قطعات الکترونیکی کم جریان اضافی (روشنایی LED ، آویز و غیره) را تغذیه کنید اما هیچ اتصال اضافی روی برد توزیع برق شما وجود ندارد ، می توانید از کابل شارژ باتری استفاده کنید. کانکتور شارژ سفید معمولاً دارای یک پین برای اتصال زمین و یک پین برای هر سلول (1S ، 2S ، 3S و غیره) است که در مجموعه باتری LiPo استفاده می شود.اگرچه این اتصال واقعاً فقط برای شارژ باتری است ، اما می تواند ولتاژ خروجی 3.7 ولت را از هر پین تأمین کند و می تواند برای تغذیه قطعات الکترونیکی کم جریان مانند مهار یا LED ها استفاده شود.
- سیم قرمز را از هر کانکتور 3 پین R / C کروز کنترل بجز یک عدد جدا کنید. توصیه می شود این کار را به گونه ای انجام دهید که در صورت لزوم همیشه بتوانید آنها را وصل کنید. انتهای هر سیم خارج شده را با نوار الکتریکی بپیچید یا از لوله های حرارتی برای عایق استفاده کنید تا بعداً با سایر وسایل برقی تماس نداشته باشند. تنها سیم قرمز که دست نخورده باقی می ماند ، کنترل کننده پرواز مورد استفاده در مجموعه را تغذیه می کند.
- دو سیم تغذیه هر ESC را به برد توزیع وصل کنید ، مطمئن شوید سیم قرمز به مثبت () و سیم سیاه به منفی (-) برود.
- اگر برد توزیع برق مورد استفاده شما دارای اتصالات R / C مخصوص به خود است ، در این صورت به شما بستگی دارد که پین های R / C هر ESC را به کانکتورهای R / C در این برد متصل کنید. یا آنها را مستقیماً به کنترل کننده پرواز وصل کنید.
- هریک از سه کانکتور موتور را به سه کانکتور ESC وصل کنید. در حال حاضر ، ترتیب اتصال این اتصالات مهم نیست (اگر بر جهت چرخش تأثیر بگذارد ، بعداً در صورت لزوم تصحیح می شود).
لطفاً توجه داشته باشید که اگر تصمیم دارید سیم کشی را در این مرحله بردارید یا پنهان کنید ، ممکن است بعداً طبق روشی که در درس 6 توضیح داده شده ، به برخی از اتصالات دسترسی داشته باشید ، به ویژه ، مبادله را انجام دهید. اتصال بین ESC و یک موتور به طوری که موتور در جهت مخالف می چرخد.

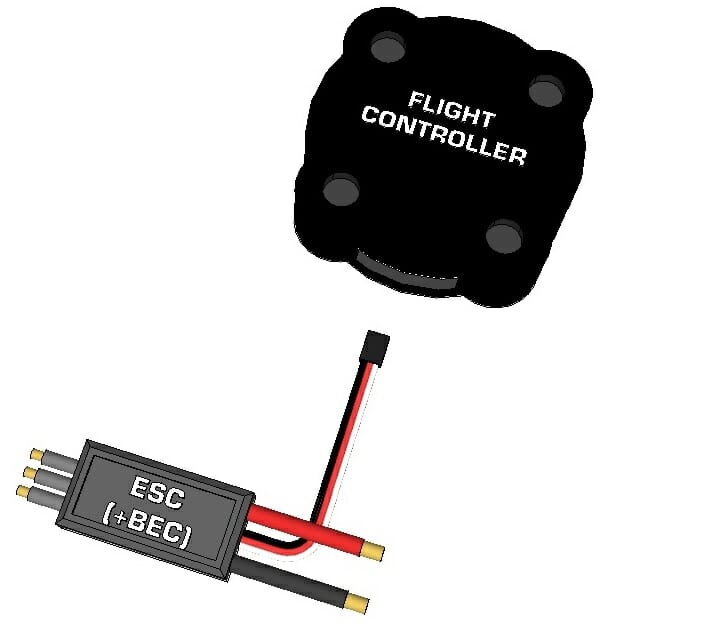
ESC. کنترل کننده پرواز.
اکنون می توانید ورودی های R / C کنترلرهای کروز را به کنترل کننده وصل کنید. کنترل کننده پرواز که انتخاب می کنید باید دارای نمودار باشد که نشان می دهد کدام پین های کنترل کننده به موتورهای مجموعه چند روتور شما متصل هستند. این نمودار همچنین باید جهت چرخش هر موتور را نشان دهد ، اما باز هم ، در حال حاضر لازم نیست جهت را در نظر بگیرید.
- نمودار اتصال موتورها / ESC و کنترل کننده پرواز را در دفترچه راهنمای کامپیوتر مشاهده کنید.
- اتصالات R / C هر ESC را به پین های مربوطه در کنترل کننده پرواز وصل کنید ، مطمئن شوید سیم زمین (معمولاً مشکی) به پایه زمین کنترلر پرواز و پین سیگنال (سفید یا زرد) متصل می شود.) به پین سیگنال کنترل پرواز متصل می شود...
- فقط یکی از اتصالات RC همچنان دارای پین قرمز (قدرت) است.
ارتباط
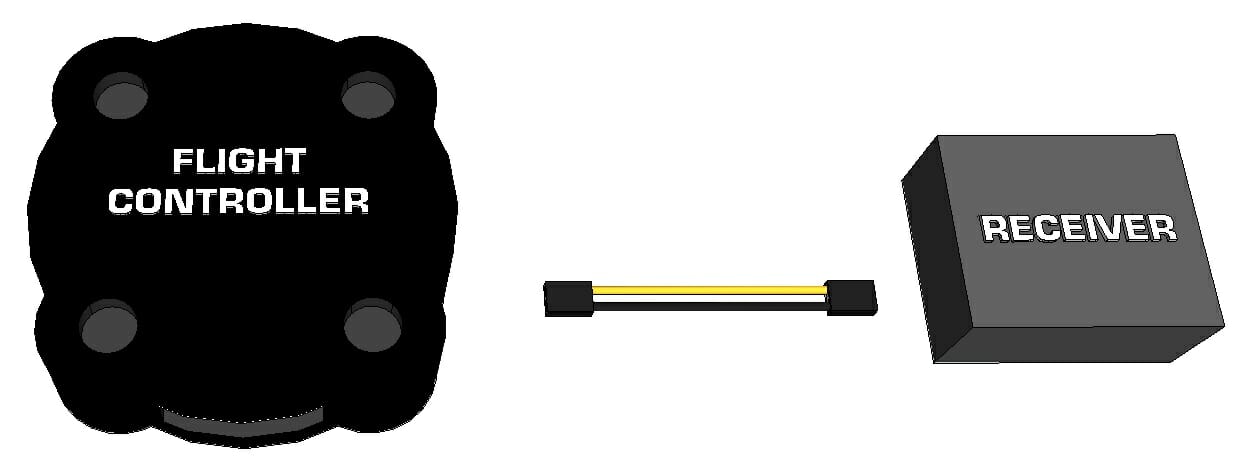
گیرنده. کنترل کننده پرواز.
فرض کنید در این درس شما به نفع کنترل رادیویی به عنوان دستگاه ورودی انتخاب کرده اید.اگر می خواهید از WiFi ، بلوتوث یا سایر روش های ورودی استفاده کنید ، لطفاً دفترچه راهنمای کنترل پرواز را بخوانید و ورودی سریال را جستجو کنید. این بخش نحوه / محل اتصال دستگاه ورودی سریال به کنترل کننده پرواز را توضیح می دهد. به احتمال زیاد شما باید پین فرستنده (Tx) ، دریافت (Rx) ، ولتاژ (5V) و GND پین را از دستگاه بی سیم به فرستنده بیابید و وصل کنید ، که Rx را از یکی به Tx دیگر و برعکس اجازه می دهد.
فرستنده RC شما باید با گیرنده RC مناسب همراه باشد. گیرنده باید به فرستنده متصل باشد تا بتوانید بلوز اتصال را از گیرنده (در صورت وجود) بردارید. این کیت همچنین ممکن است دارای یک نگهدارنده باتری AA باشد که برای تغذیه گیرنده طراحی شده است ، اما ما از آن استفاده نمی کنیم زیرا BEC هم گیرنده و هم کنترل پرواز را تغذیه می کند. برای اینکه بدانید کدام کانال های گیرنده RC به کدام پین در کنترل کننده پرواز متصل می شوند ، باید به دفترچه راهنمای کاربر کنترل کننده پرواز و سیستم RC نگاه کنید.
دفترچه راهنمای کنترل کننده محل قرارگیری پین های زیر را که باید با گیرنده مطابقت داده شوند متصل می کند:
- دریچه گاز
- زمین
- Yaw
- رول
- سوئیچ های Aux 1 ، 2 ، 3 و غیره
اکنون می توانید اتصالات زیر را ایجاد کنید:
- دفترچه راهنمای کنترل پرواز را بخوانید تا ببینید کدام پین ورودی R / C متصل است با کدام یک از توابع بالا
- دفترچه راهنمای فرستنده را بخوانید که کدام کانال با هر عملکرد مرتبط است.
- برخی از فرستنده های RC را می توان برنامه ریزی مجدد کرد تا عملکرد هر مخاطب تغییر کند. اگر تصمیم دارید هر ورودی (جوی استیک یا سوئیچ) را تغییر دهید ، این کار را تنها پس از اطمینان از اینکه می دانید کدام کانال روی گیرنده مربوط به کدام عملکرد است ، انجام دهید. Throttle ، Pitch ، Yaw و Roll همیشه باید با دو چوب / جوی استیک همراه باشد نه سوئیچ یا دکمه.
- کانال دریچه گاز روی گیرنده را به ورودی دریچه گاز در کنترلر وصل کنید.
- کانال Pitch روی گیرنده را به ورودی Pitch در کنترلر پرواز وصل کنید.
- کانال Yaw روی گیرنده را به ورودی Yaw در کنترلر وصل کنید.
- GND را روی کنترل کننده پرواز (معمولاً ردیف سوم پین ها) به GND روی گیرنده (معمولاً ردیف سوم پین ها) وصل کنید.
- اگر از ورودی کمکی استفاده می شود ، Aux 1 روی گیرنده را به Aux 1 در کنترل پرواز و غیره وصل کنید.
برای هر کانال می توانید از سیم های سرو 3 پین استفاده کنید ، اما فقط یکی از کانال ها (می تواند هر کدام باشد) باید دارای ولتاژ و زمین باشد. بقیه فقط به سیم سیگنال نیاز دارند. همه اتصالات می توانند GND به GND باشند ، اگرچه فقط یک مورد مورد نیاز است. یک بار دیگر ، گیرنده نیازی به باتری جداگانه ندارد زیرا از کنترل کننده پرواز تغذیه می کند ، که توسط BEC از یکی از ESC ها تغذیه می شود.
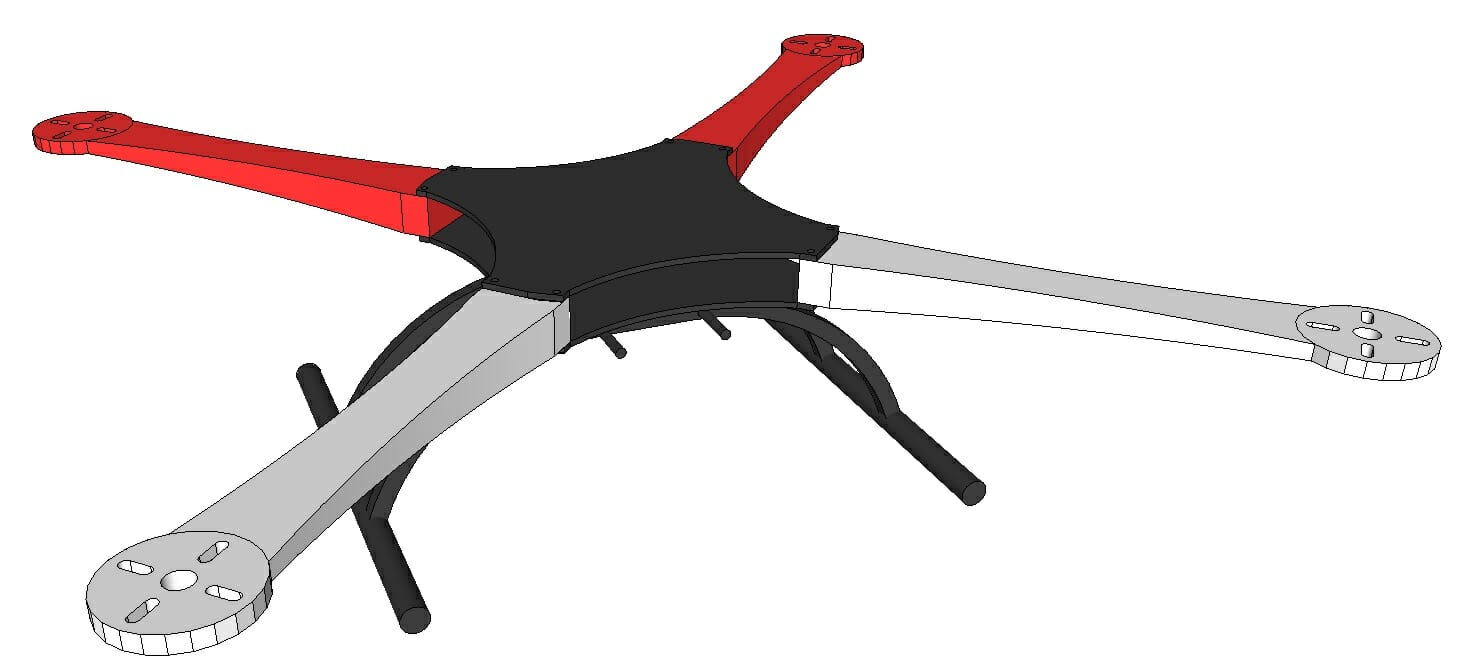
مونتاژ قاب
اگر در حال ساخت قاب خودتان هستید ، می توانید آن را در این مرحله مونتاژ کنید.اگر کیت قاب خریداری کرده اید ، دستورالعمل های مونتاژ را دنبال کنید. لطفاً توجه داشته باشید که برای تسهیل اتصال یا حذف (پنهان کردن) عناصر الکتریکی ممکن است لازم باشد قسمتهای خاصی را جدا کنید. هدف این است که اطمینان حاصل شود که هیچ چیزی شل نشده است ، همه سیم ها محکم محکم شده اند و هیچ چیز نمی تواند از قاب خارج شده یا درهم پیچیده شود.
نصب
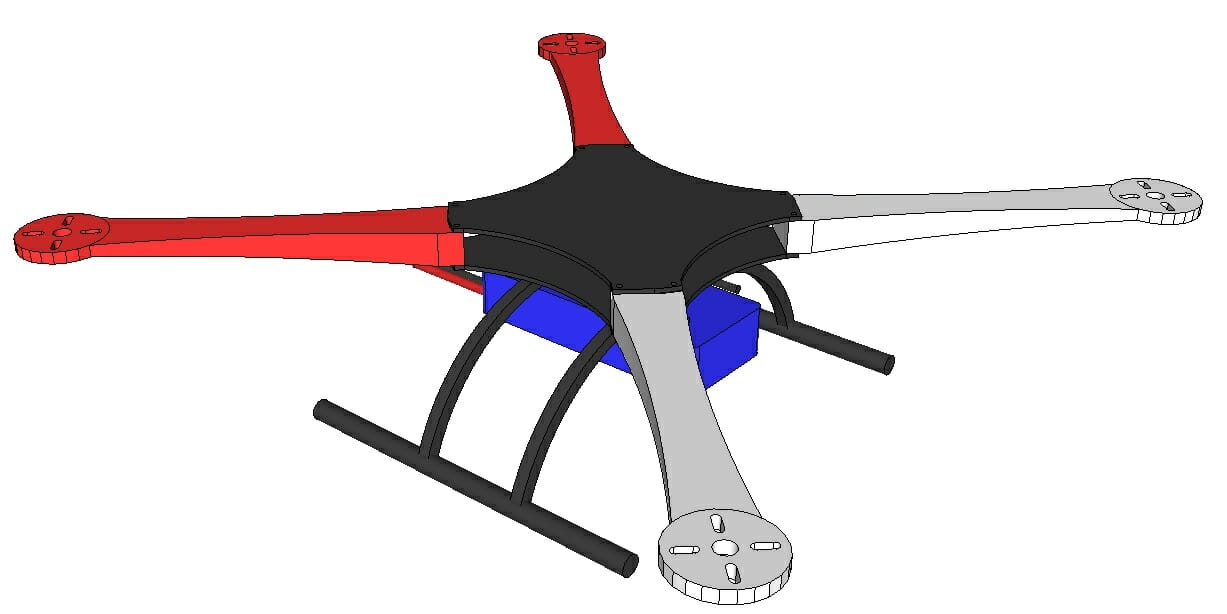
محل باتری.
باتری مورد استفاده برای تغذیه اغلب سنگین ترین عنصر یک پهپاد است و می تواند از 1/4 تا 1/2 وزن کل آن را شامل شود. بنابراین ، محل نصب آن بسیار مهم است. مکان ایده آل برای باتری اصلی باید در مرکز هواپیما باشد تا همه موتورها بتوانند تقریباً یک بار را تحمل کنند. اگر باتری به عقب هواپیما نزدیکتر باشد ، موتورهای عقب باید نیروی بیشتری نسبت به موتورهای جلو ایجاد کنند و بنابراین حداکثر رانش کلی محدود می شود (هنگامی که موتورهای عقب در رانش کامل باشند ، هیچ ضربه زدن به موتورهای جلو). در حالی که رویکرد معمول در طراحی چند روتور این است که هواپیما در یک خط مرکزی (یا حداقل یک محور) متقارن باشد ، بنابراین باتری باید در امتداد آن خط مرکزی قرار گیرد تا از یک طرف یا طرف دیگر افست شود...
در مرحله بعد ، باید تصمیم بگیرید که باتری را در چه ارتفاعی قرار دهید. چندین مکان برای نصب باتری وجود دارد:
- زیر قاب (هواپیما در زیر سنگین خواهد بود ، پایدارتر است و آکروباتیک کمتری دارد).
- مستقیماً زیر موتورها (معمولاً داخل قاب) ؛ احتمالاً یکی از بهترین مکان ها
- در همان ارتفاع موتورها یا روتورها (به عنوان مثال در بالای قاب نصب شده است).
- در بالای پروانه ها (پهپاد در بالا سنگین تر و مستعد چرخاندن است).
برای بهترین عملکرد ، در حالت ایده آل باتری باید در موقعیت 3 بالا قرار گیرد. موقعیت 4 تأثیر یک پاندول معکوس را ایجاد می کند ، و اگر پهپاد از زاویه خاصی فراتر رود ، پهپاد تمایل به چرخاندن دارد. موقعیت 1 یک پلت فرم نسبتاً پایدار ایجاد می کند که به طبع آن تمایل به حفظ سطح دارد ، اما برای آکروباتیک بسیار نامناسب است. بنابراین ، اکثر طراحان موقعیت 2 را انتخاب می کنند و باتری را مستقیماً در زیر قاب یا داخل آن قرار می دهند. این رویکرد فضای زیر قاب را برای محموله هایی مانند سیستم تعلیق آزاد می کند و فضای بالایی را برای کنترل کننده پرواز و سایر وسایل الکترونیکی تا آنجا که ممکن است آزاد می کند.
نصب باتری
روشهای متداول زیادی برای اتصال باتری به قاب وجود دارد ، از جمله:
- تسمه Velcro
- Velcro چسبنده (یک طرف به باتری و طرف دیگر به قاب چسبانده شده است)
- در قاب
تسمه های Velcro بیشتر برای "استاندارد متوسط" رایج هستند ”اندازه های بدون سرنشین سفارشی در حالی که محوطه قاب بیشتر در هواپیماهای بدون سرنشین تجاری یافت می شود ، قاب چنین پهپادهایی تحت فشار تصور می شود و فضای خاصی را برای یک باتری خاص در داخل خود باقی می گذارد. از Velcro در حالت ایده آل فقط در صورتی استفاده می شود که باتری نسبتاً سبک باشد. به جای یک قسمت کوتاه در مرکز ، توصیه می شود یک نوار را در تمام طول باتری بچسبانید. اگر از تسمه های Velcro استفاده می کنید و متوجه شدید که باتری به دلیل عدم چسبندگی تمایل به خاموش شدن دارد ، توصیه می شود که نوارهای لاستیکی را در محل تماس باتری با تسمه ها اضافه کنید. توصیه نمی شود از چسب برای محکم کردن باتری به قاب استفاده کنید. اگر از پهپاد استفاده نمی کنید ، باتری را برداشته و در کیسه ایمن LiPo یا مخزن سرامیکی ذخیره کنید.
شارژ باتری
به احتمال زیاد شما لیتیوم پلیمر (LiPo) یا باتری لیتیومی دیگر را انتخاب کرده اید. اکثر باتری های LiPo بیش از 3.7 ولت دارای یک کابل شارژ جداگانه با اتصال چند پین برای شارژ هستند ، در حالی که کابل برق را می توان با وجود یک کانکتور دو پین با سیم های بزرگتر که قادر به تحمل جریانهای تخلیه زیاد هستند ، تشخیص داد. یک کانکتور شارژ معمولاً یک مخاطب برای هر بانک باتری و همچنین یک تماس زمین مشترک دارد.
با توجه به خطرات مربوط به باتری های LiPo (هیدروژن و برق) ، این یک عمل معمول است که در صورت عدم استفاده ، باتری را از هواپیمای بدون سرنشین به طور کامل خارج کرده و آن را در کیسه LiPo Safe قرار دهید. هنگام شارژ باتری از همین کیف استفاده می شود (باتری را به شارژر وصل کنید ، باتری را در کیسه بگذارید (شارژر را بیرون از کیف بگذارید) و آن را ببندید (معمولاً دارای فلپ ولکرو))
.محل قرارگیری و نصب کنترلر پرواز
در حالت ایده آل ، کنترل کننده پرواز باید در مرکز هواپیمای بدون سرنشین و در ارتفاع یکسان موتورها قرار گیرد. اگر این امکان وجود ندارد ، می توان کنترل کننده را قرار داد کمی بالاتر یا پایین. جهت به سمت چپ یا راست ، و از نصب آن به جلو یا عقب اجتناب کنید. اگر قاب برای یک پهپاد خریداری کرده اید ، اغلب این سوراخ ها برای کنترل کننده پرواز نصب می شوند که در مکان مطلوب قرار دارند. می توان به هر یک از روشهای اساسی زیر ثابت کرد:
- پیچ / مهره / راست (اساسی)
- نوار دو طرفه (مطمئن شوید که از استحکام کافی برخوردار است)
- نوار فوم دو طرفه (برای دستیابی به اثر میرایی)
- بوش های میرایی لاستیکی (برای میرایی زیاد)
برخی از کنترل کننده های پرواز یا دارای یک محافظ اختیاری هستند یا ممکن است داشته باشند.
در این مرحله شما باید یک پهپاد کاملاً مونتاژ و متصل به استثنای پروانه ها داشته باشید. درس 6 شامل راه اندازی و آزمایش فرستنده ، نرم افزار کنترل پرواز ، بررسی قبل از پرواز و اولین پرواز است.







