Conteúdo
- Drone DIY: Lição 1. Terminologia.
- Drone "faça você mesmo": Lição 2. Quadros.
- Drone faça você mesmo: Lição 3. Usina de energia.
- Drone faça você mesmo: Lição 4. Controlador de vôo.
- Drone faça você mesmo: Lição 5. Montagem.
- Drone "faça você mesmo": Lição 6. Verificação de desempenho.
- Drone faça você mesmo: Lição 7. FPV e distância.
- Drone com suas próprias mãos: Lição 8. Aviões.
Introdução
Agora que você selecionou todos os componentes principais do seu UAV, pode começar a montagem. Este guia cobrirá erros comuns na montagem de um UAV com vários rotores, junto com algumas dicas úteis para ajuste. Esta lição não cobrirá itens como uma câmera / sistema FPV, dispositivos de longo alcance ou outros acessórios (abordaremos na lição 7).
Componentes que você deve ter nesta fase:
- Estrutura (adquirida ou feita à mão)
- Motores, ESCs, hélices, bateria, dispositivo carregador
- Quadro / chicote de distribuição de energia
- Controlador de vôo e dispositivo de comunicação (proposto por rádio controle)

Propulsão
Para atingir os objetivos desta lição, o sistema de propulsão do seu UAV incluirá os seguintes componentes:
- Motores
- ESC
- Distribuição de potência (placa ou arnês)
- Bateria
- Controlador de voo
Observe que as hélices não estão listadas. Não instale hélices nesta fase! Os parafusos principais serão conectados apenas na 6ª lição. Como este é o seu primeiro drone, recomendamos fazer uma conexão elétrica “sem moldura” antes de instalar tudo no quadro; para verificar todas as conexões e eliminar as falhas identificadas.
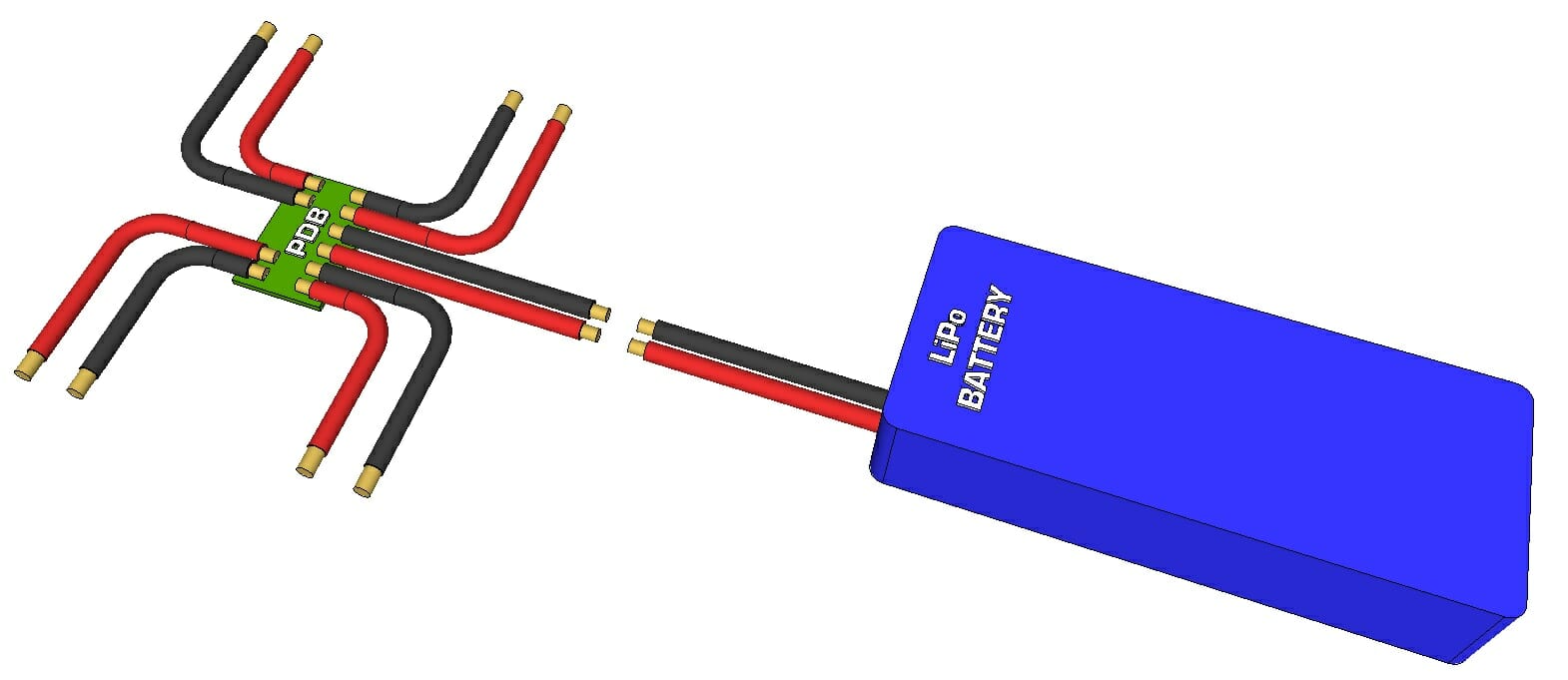
Bateria. Distribuição de energia
A conexão entre a bateria e o sistema de distribuição de energia deve ser relativamente simples se ambos tiverem o mesmo tipo de conector. Nesse caso, prossiga para a próxima etapa. Se os conectores forem diferentes, em nenhum caso corte os fios da bateria para separar o conector; isso pode causar um curto-circuito e um choque elétrico desagradável! Em vez disso, você pode pegar um adaptador e usá-lo entre o conector da bateria e o conector da placa de distribuição de energia. Outra opção pode ser procurar um conector correspondente ao conector da bateria e comprá-lo; em seguida, corte o conector existente do distribuidor de energia e solde o substituto adquirido, primeiro certificando-se de que não haja conexão entre os pinos positivo e negativo.
É importante notar que a maioria dos UAVs multi-rotor não tem um interruptor liga / desliga, então a energia é fornecida e desconectada conectando e desconectando a bateria principal do conector do distribuidor de energia, então seus conectores devem ser firmemente presos e os fios / pontos de solda estão bem isolados com tubulação termorretrátil e / ou fita isolante.
Desconecte a bateria do distribuidor de energia antes de prosseguir.
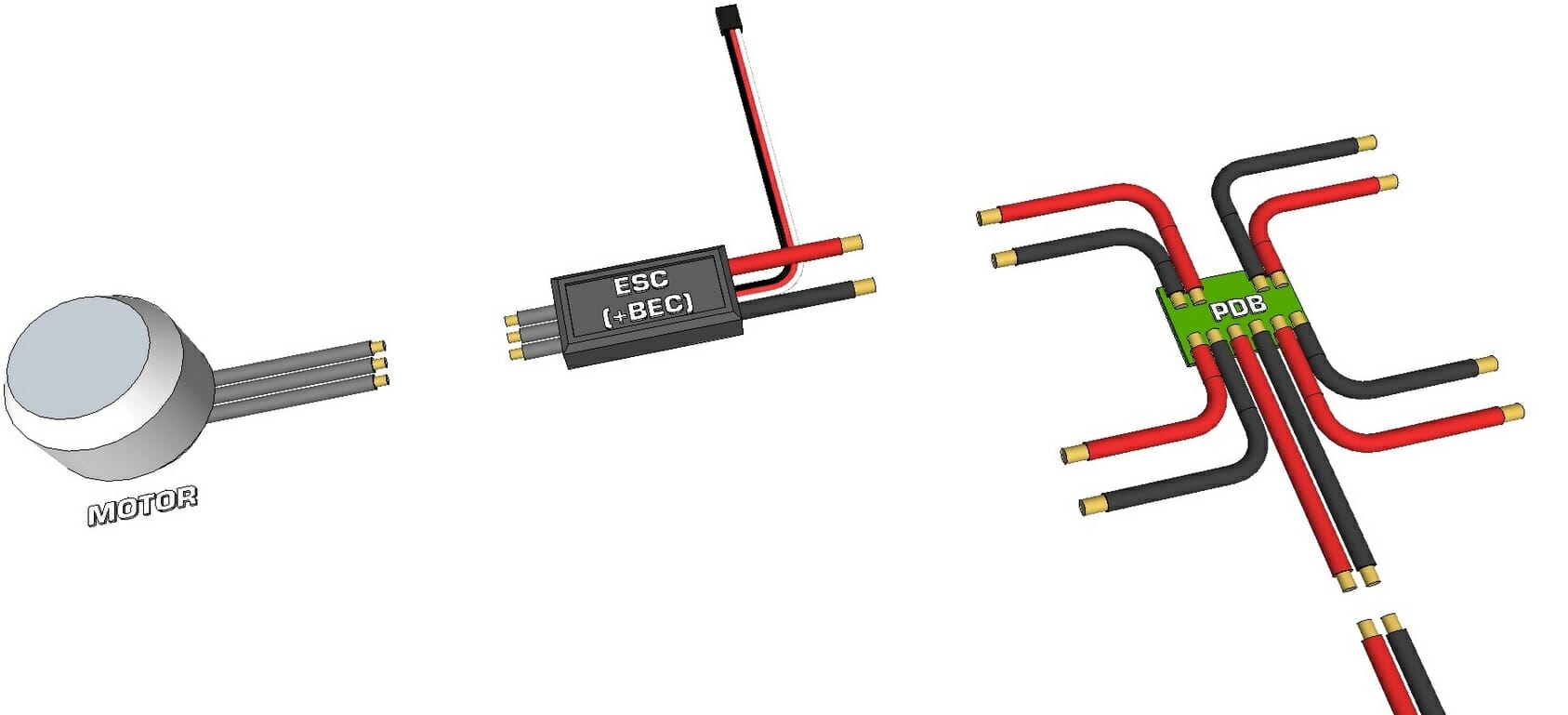
Motor. ESC. Distribuição de energia
A placa de distribuição de energia (PDP) ou distribuição com fio serve principalmente para distribuir energia da bateria principal para cada ESC. A tensão é fornecida ao ESC "como está", portanto, não há necessidade de aumentar (aumentar) ou diminuir (diminuir) a tensão. Se seu drone tem quatro motores, você deve ter quatro ESCs e, portanto, sua placa de distribuição / distribuição de fios deve eventualmente dividir a bateria principal em quatro conexões. Se o seu PRP tiver seis conexões e você estiver construindo um quadrocopter, simplesmente não precisa conectar os dois últimos. Se você estiver construindo um hexacóptero, seu PDP deve distribuir energia da bateria principal para seis conexões. O ESC inclui os seguintes fios:
- Uma fita de 3 fios de 0,1 polegadas com conector R / C, dos quais o pino preto geralmente é aterrado, o vermelho fornece saída de 5 V (via BEC*) e amarelo / branco é a entrada do sinal.
- Três fios separados conectam-se aos três fios em um motor DC sem escova (geralmente fornecido com conectores bullet fêmea que já estão soldados ou incluídos).
- Dois conectores de entrada para conectar a bateria ao PDB (alguns incluem conectores soldados com solda, alguns estão incluídos e às vezes nem um pouco).
*Os ESCs geralmente têm um Circuito de Eliminação de Bateria embutido (ou BEC) que converte a tensão da bateria principal em 5 V para alimentar o receptor e o controlador de vôo. 5 V normalmente é fornecido através do conector RC do ESC (geralmente o pino central / vermelho). Você só precisa de um BEC para alimentar o controlador de vôo.
Se a placa de distribuição de energia usar conectores que não correspondem aos conectores do ESC ou da bateria, você precisará comprar adaptadores (adaptadores) ou adquirir novos conectores e substituí-los no ESC ou PRP. A vantagem continua com o quadro de distribuição de energia, cujos conectores correspondem aos da bateria e do ESC. Na maioria das vezes, uma bateria de polímero de lítio de um UAV pode ter conector DEANSXT60EC3
Se você deseja alimentar outros componentes eletrônicos de baixa corrente (iluminação LED, pendente, etc.), mas não há conexões sobressalentes na placa de distribuição de energia, pode usar o cabo de carregamento da bateria. O conector de carga branco geralmente tem um pino para aterramento e um pino para cada célula (1S, 2S, 3S, etc.) usada no conjunto da bateria LiPo. Embora esse conector seja realmente apenas para carregar a bateria, ele pode fornecer uma tensão de saída de 3,7 V de cada pino e pode ser usado para alimentar componentes eletrônicos de baixa corrente, como um chicote ou LEDs.
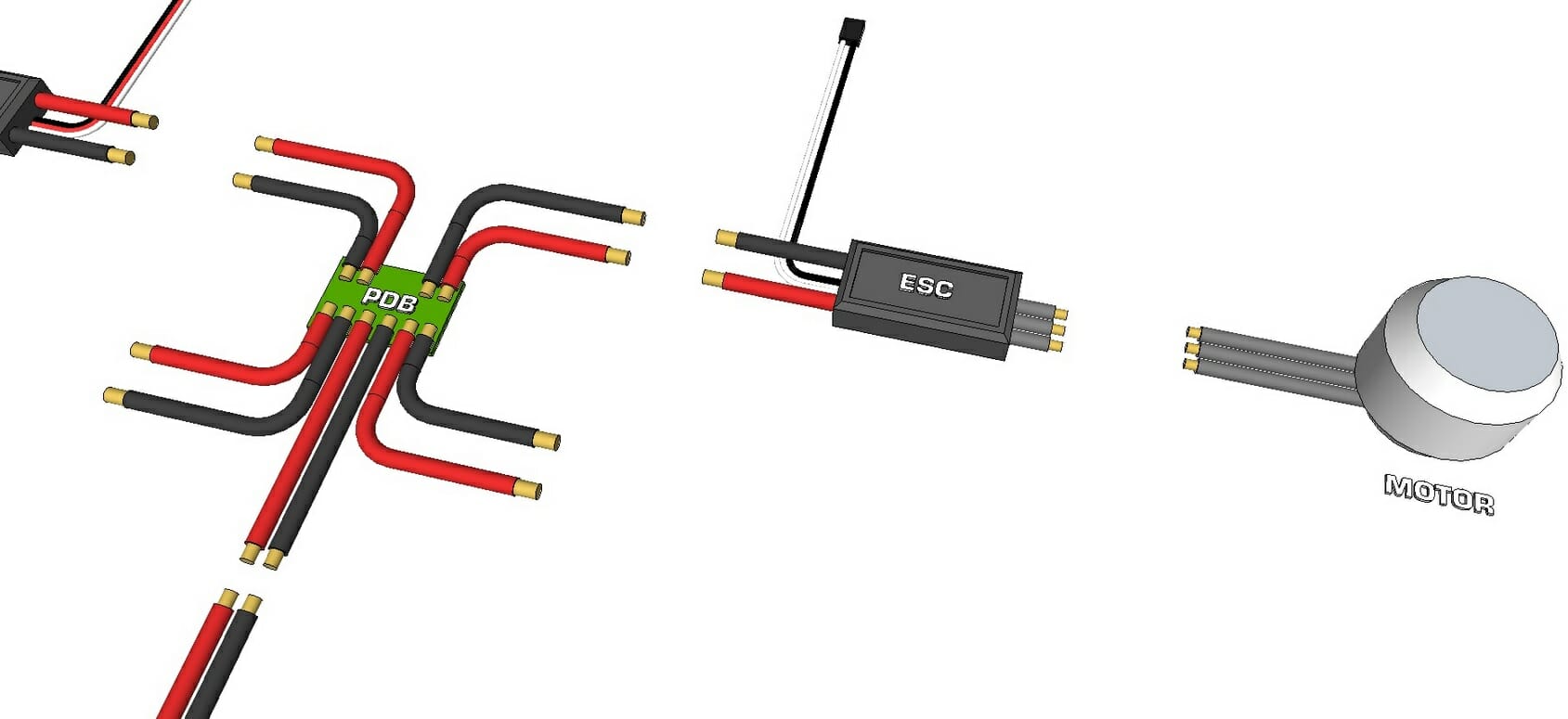
- Remova o fio vermelho de cada conector R / C de 3 pinos do controle de cruzeiro, exceto um. É recomendável que você faça isso de forma que sempre possa conectá-los novamente, se necessário. Enrole a extremidade de cada fio excluído com fita isolante ou use tubulação termorretrátil para isolamento, de modo que mais tarde eles não possam entrar em contato com outros componentes eletrônicos. O único fio vermelho que não for tocado irá alimentar o controlador de vôo usado na montagem.
- Conecte os dois fios de alimentação de cada ESC ao quadro de distribuição, certificando-se de que o fio vermelho vá para positivo () e o fio preto para negativo (-).
- Se a placa de distribuição de energia que você está usando possui seus próprios conectores R / C, então, neste caso, cabe a você conectar os pinos R / C de cada ESC aos conectores R / C nesta placa ou conecte-os diretamente ao controlador de vôo.
- Conecte cada um dos três conectores do motor aos três conectores ESC. No momento, a ordem de conexão desses conectores não é importante (se afetar o sentido de rotação, será corrigida conforme necessário posteriormente).
Por favor, note que se você decidir remover ou ocultar a fiação nesta fase, você pode precisar acessar posteriormente algumas das conexões de acordo com o procedimento descrito na Lição 6, em particular, troque o conexões entre o ESC e um motor para que o motor gire na direção oposta.

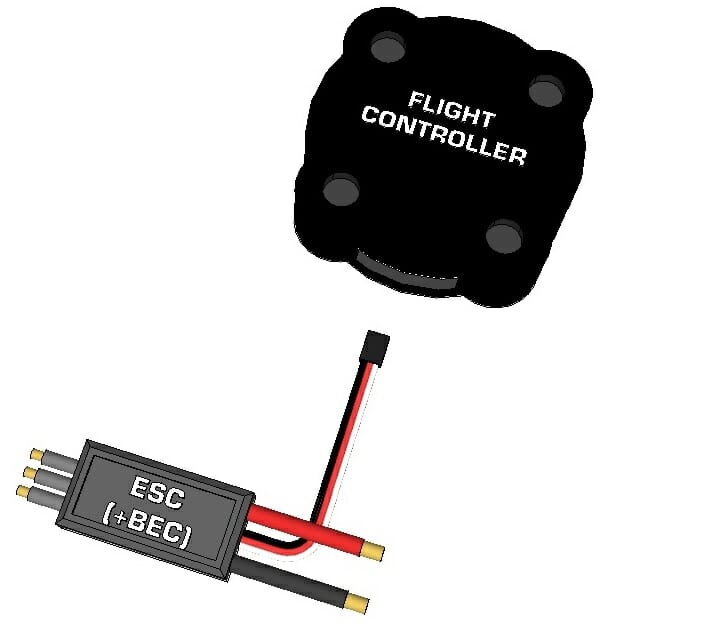
ESC. Controlador de vôo.
Agora você pode conectar as entradas R / C dos controladores de cruzeiro ao controlador de vôo. O controlador de vôo que você escolher deve ter um diagrama que mostra quais pinos do controlador estão conectados aos motores do seu conjunto multirrotor. Este diagrama também deve mostrar a direção de rotação de cada motor, mas, novamente, você não precisa considerar a direção por enquanto.
- Veja o diagrama de conexão entre os motores / ESC e o controlador de vôo no manual de instruções do PC.
- Conecte os conectores R / C de cada ESC aos pinos correspondentes no controlador de vôo, certifique-se de que o fio terra (geralmente preto) se conecta ao pino terra do controlador de vôo e o pino de sinal (branco ou amarelo) se conecta ao pino de sinal no controlador de vôo...
- Apenas um dos conectores RC ainda terá o pino vermelho (alimentação).
Comunicação
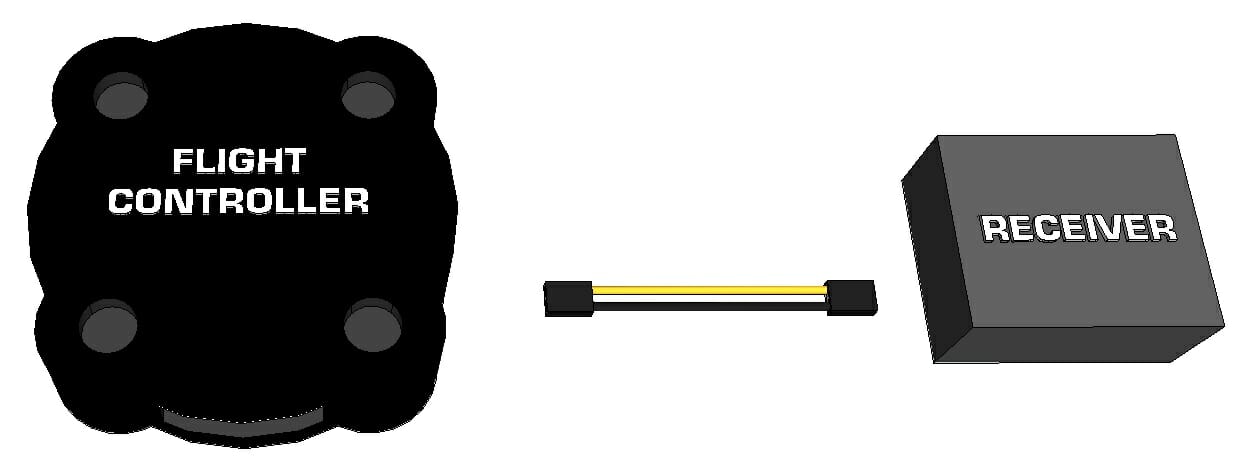
Receptor. Controlador de vôo.
Suponha que nesta lição você tenha feito a escolha em favor do controle de rádio como o dispositivo de entrada. Se você quiser usar WiFi, Bluetooth ou outro método de entrada, leia o manual do controlador de vôo e procure a entrada serial; Esta seção descreverá como / onde conectar o dispositivo de entrada serial ao controlador de vôo. Você provavelmente precisará encontrar e conectar os pinos de transmissão (Tx), recepção (Rx), tensão (5V) e GND do dispositivo sem fio ao transmissor, permitindo Rx de um para o outro Tx e vice-versa.
Seu transmissor RC deve vir com um receptor RC apropriado. O receptor deve ser ligado ao transmissor para que você possa remover o jumper de ligação do receptor (se houver). O kit também pode incluir um suporte de bateria AA, que é projetado para alimentar o receptor, mas não o usaremos porque o BEC alimentará o receptor e o controlador de vôo. Para descobrir quais canais do receptor RC se conectam a quais pinos no controlador de vôo, você precisa consultar o manual do usuário do controlador de vôo e do sistema RC.
O manual do controlador de vôo indicará as localizações dos seguintes pinos a serem combinados e conectados ao receptor:
- Throttle
- Pitch
- Yaw
- Roll
- Chaves auxiliares 1, 2, 3, etc.
Agora você pode fazer as seguintes conexões:
- Leia o manual do controlador de vôo para ver qual pino de entrada R / C está conectado com qual das funções acima.
- Leia o manual do transmissor para qual canal está associado a cada função.
- Alguns transmissores RC podem ser reprogramados para alterar a função de cada contato. Se decidir alterar qualquer entrada (joystick ou interruptor), faça-o somente depois de se certificar de que sabe qual canal no receptor corresponde a qual função. Throttle, Pitch, Yaw e Roll devem sempre ser associados a dois manípulos / joysticks, não interruptores ou botões.
- Conecte o canal do acelerador no receptor à entrada do acelerador no controlador de vôo.
- Conecte o canal de Pitch no receptor à entrada de Pitch no controlador de vôo.
- Conecte o canal Yaw no receptor à entrada Yaw no controlador de vôo.
- Conecte o GND no controlador de vôo (geralmente a terceira linha de pinos) ao GND no receptor (geralmente a terceira linha de pinos).
- Se a entrada auxiliar for usada, conecte o Aux 1 no receptor ao Aux 1 no controlador de vôo e assim por diante.
Você pode usar fios de servo de 3 pinos para cada canal, mas apenas um dos canais (pode ser qualquer) deve ter tensão e aterramento; o resto só precisa de um fio de sinal. Todas as conexões podem ser GND a GND, embora apenas uma seja necessária. Mais uma vez, o receptor não precisa de uma bateria separada, pois será alimentado pelo controlador de vôo, que é alimentado pelo BEC de um dos ESCs.
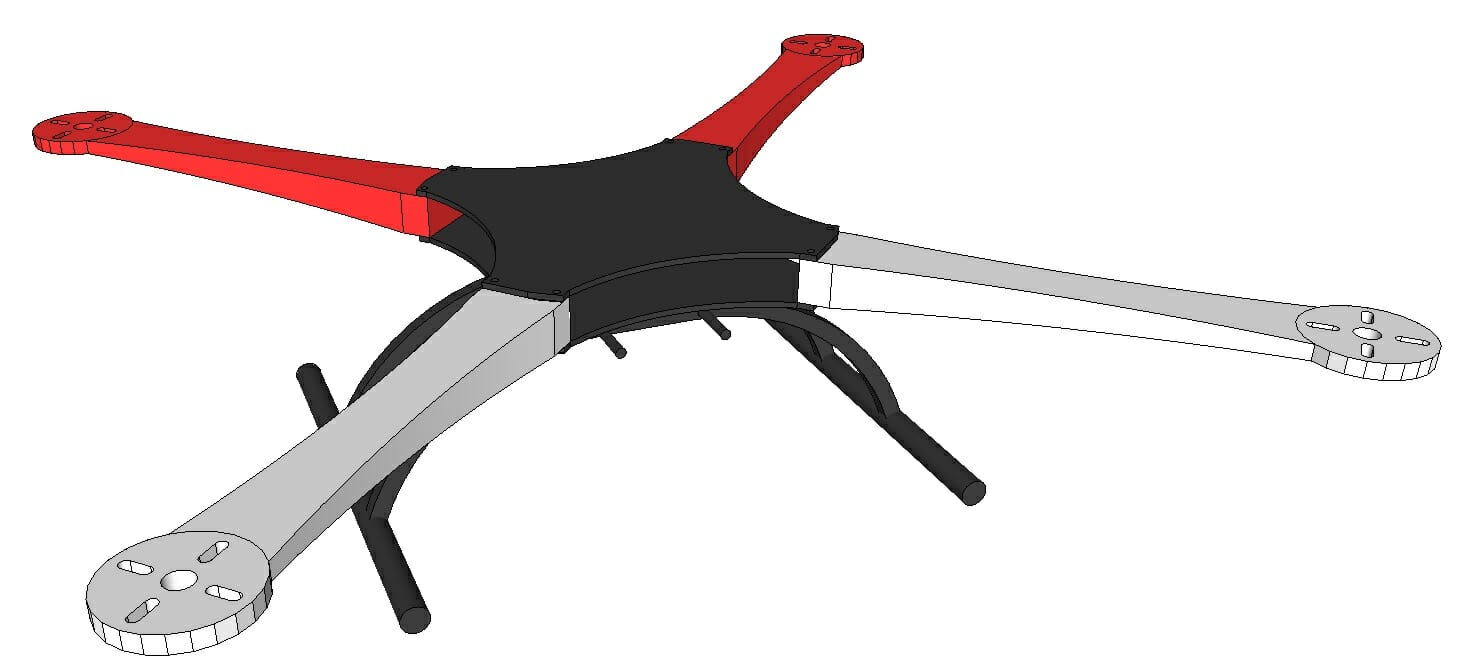
Montagem da estrutura
Se você estiver construindo sua própria estrutura, poderá montá-la neste estágio. Se você adquiriu um kit de estrutura, siga as instruções de montagem. Observe que pode ser necessário desmontar certas áreas para facilitar a conexão ou remover (ocultar) os elementos elétricos. O objetivo é garantir que nada esteja solto, que todos os fios estejam bem presos e que nada possa cair da estrutura ou se emaranhar.
Instalação
Localização da bateria.
A bateria usada para alimentar é geralmente o elemento mais pesado em um UAV e pode variar de 1/4 a 1/2 de seu peso total. Portanto, o local de sua instalação é muito importante. O local ideal para a bateria principal deve ser no centro da aeronave, de modo que todos os motores possam lidar com aproximadamente a mesma carga. Se a bateria estiver localizada mais perto da parte traseira da aeronave, os motores traseiros terão que fornecer mais empuxo do que os motores dianteiros e, portanto, o empuxo total máximo será limitado (quando os motores traseiros estiverem com empuxo total, não haverá impulso nos motores dianteiros). Considerando que a abordagem usual no projeto de vários rotores é manter a aeronave simétrica em relação a uma linha central (ou pelo menos um eixo), então a bateria deve ser colocada ao longo dessa linha central, em vez de deslocada para um lado ou outro...
Em seguida, você precisará decidir em que altura colocar a bateria. Existem vários locais onde a bateria pode ser instalada:
- Sob o quadro (a aeronave será pesada por baixo, mais estável e menos acrobática).
- Diretamente sob os motores (geralmente dentro da carcaça); possivelmente um dos melhores lugares.
- Na mesma altura que os motores ou rotores (por exemplo, montado no topo da estrutura).
- Acima das hélices (o UAV será mais pesado no topo e mais propenso a capotar).
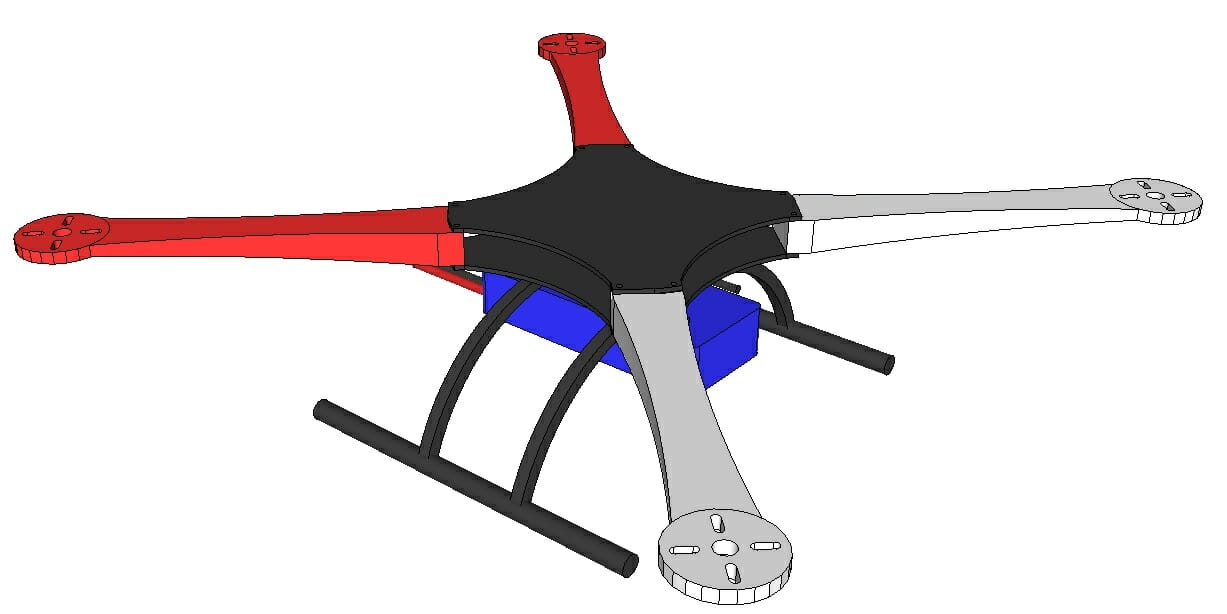
Para melhor desempenho, o ideal é que a bateria esteja localizada na posição 3 acima. A posição 4 cria o efeito de um pêndulo invertido e, se o UAV se inclinar além de um certo ângulo, o drone tenderá a virar. A posição 1 criará uma plataforma bastante estável que, por sua natureza, tende a permanecer nivelada, mas é extremamente inadequada para acrobacias. Portanto, a maioria dos designers escolhe a posição 2 e coloca a bateria diretamente sob o quadro ou dentro dele. Essa abordagem libera espaço sob a estrutura para cargas úteis, como o sistema de suspensão, e espaço acima para o controlador de vôo e outros componentes eletrônicos ficarem o mais acessíveis possível.
Montagem da bateria
Existem muitas maneiras comuns de prender a bateria à estrutura, incluindo:
- Tiras de velcro
- Velcro autoadesivo (um lado colado na bateria e o outro na estrutura)
- Na estrutura
As tiras de velcro são mais comuns para o “padrão médio Drones personalizados de tamanho Embora o gabinete do quadro seja mais comumente encontrado em drones comerciais, os quadros de tais UAVs são concebidos sob pressão e deixam espaço interno especificamente para uma bateria específica. O ideal é que o velcro só seja usado se a bateria for relativamente leve; em vez de uma seção curta no centro, recomenda-se colar uma tira ao longo de todo o comprimento da bateria. Se você estiver usando tiras de velcro e descobrir que a bateria tende a se soltar devido à falta de aderência, é recomendável adicionar tiras de borracha onde a bateria entra em contato com as tiras. Não é recomendado usar cola para prender a bateria ao quadro. Se você não estiver usando um UAV, remova a bateria e guarde-a em uma bolsa segura LiPo ou reservatório de cerâmica.
Carregar a bateria
É muito provável que você tenha escolhido um polímero de lítio (LiPo) ou outra bateria de lítio. A maioria das baterias LiPo acima de 3,7 V tem um cabo de carregamento separado com um conector multipinos para carregar, enquanto o cabo de alimentação pode ser identificado pela presença de um conector de dois pinos com fios maiores capazes de suportar altas correntes de descarga. Um conector de carga geralmente tem um contato para cada banco de bateria, bem como um contato de aterramento comum.
Devido aos perigos associados às baterias LiPo (hidrogênio e eletricidade), é prática comum remover completamente a bateria do drone quando não estiver em uso e colocá-la em uma bolsa LiPo Safe. A mesma bolsa é usada para carregar a bateria (conecte a bateria ao carregador, coloque a bateria na bolsa (deixando o carregador fora da bolsa) e feche-a (geralmente tem uma aba de Velcro).
.Posicionamento e montagem do controlador de voo
O ideal é que o controlador de voo esteja localizado no centro do drone na mesma altura dos motores. Se isso não for possível, o controlador pode ser colocado ligeiramente superior ou inferior. para o lado esquerdo ou direito e evite montá-lo para a frente ou para trás. Se você comprou uma estrutura para um UAV, eles geralmente têm orifícios de montagem para o controlador de vôo, que estão no local ideal. O controlador de vôo pode ser fixada em qualquer uma das seguintes formas básicas:
- Parafusos / porcas / barras verticais (básico)
- Fita dupla-face (certifique-se de que é forte o suficiente)
- Fita de espuma de dupla face (para alcançar efeito de amortecimento)
- Buchas de amortecimento de borracha (para alto amortecimento)
Alguns controladores de vôo têm ou podem ter uma caixa de proteção opcional.
Nesta fase, você deve ter um UAV totalmente montado e conectado, excluindo as hélices. A lição 6 inclui configurar e testar o transmissor, o software do controlador de vôo, a verificação pré-vôo e o primeiro vôo.







