مطالب
مقدمه
در درس 5 ، شما باید مونتاژ هواپیمای بدون سرنشین (بدون نصب پروانه) را به پایان برسانید. وقت بگذارید ، زیرا حتی اشتباهات کوچک می تواند منجر به تصادف شود. هنوز چند قدم تا اولین پرواز خود دارید ، بنابراین صبور باشید و دستورالعمل های زیر را دنبال کنید. همانند درس قبلی ، ما همچنان فرض می کنیم که شما از تجهیزات کنترل رادیویی برای تعامل با پهپاد (به عنوان پرکاربردترین روش کنترل در حال حاضر) استفاده می کنید.
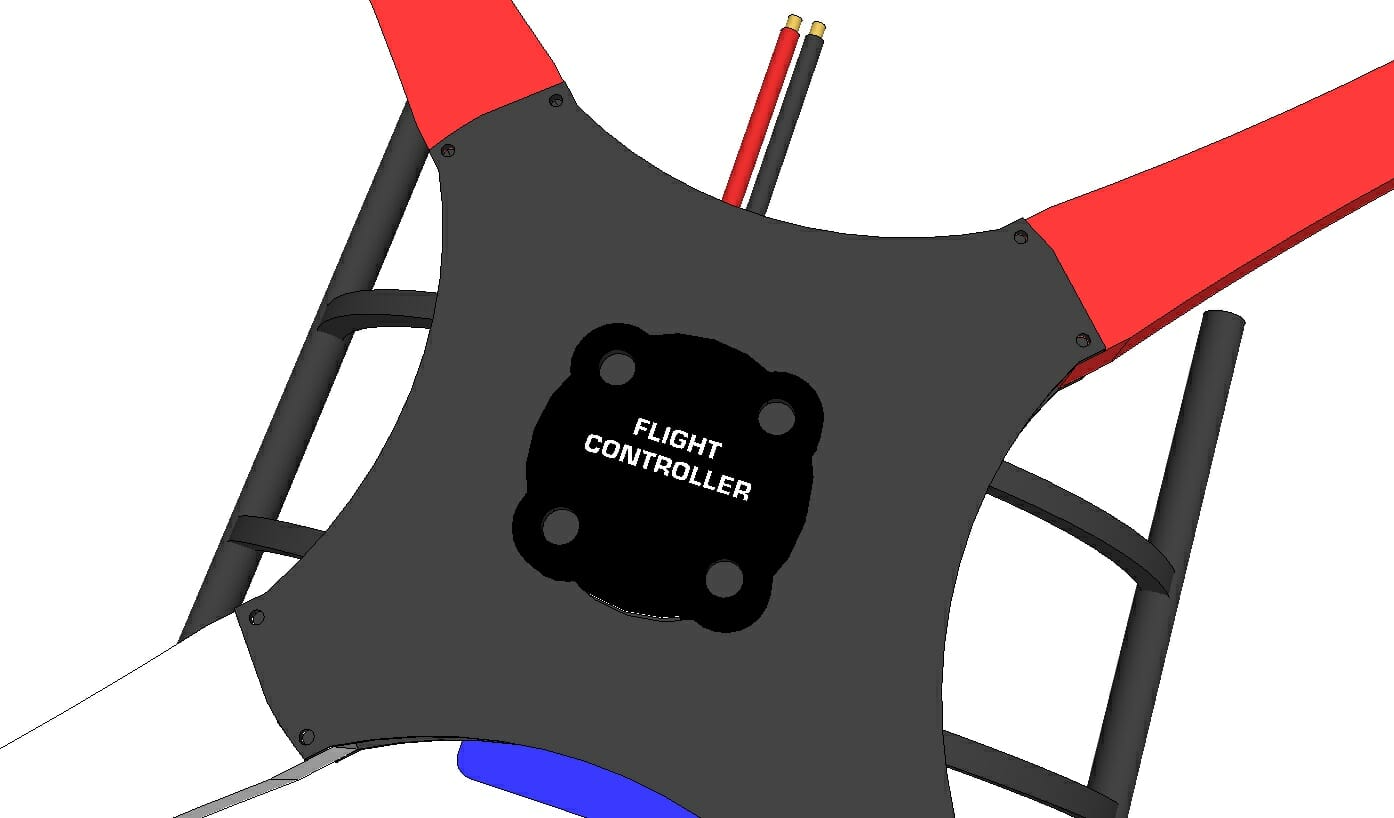
Flight Controller
- همه کنترل کننده های پرواز یکسان نیستند ، بنابراین روش راه اندازی واقعاً به مدلی که انتخاب می کنید بستگی دارد. اگر قبلاً این کار را نکرده اید ، وقت بگذارید و کتابچه راهنمای کنترل پرواز انتخابی را از ابتدا تا انتها به طور کامل بخوانید. حذف کوچکترین جزئیات می تواند تفاوت بین اولین پرواز موفق و حذف کامل را ایجاد کند. یک کتابچه راهنمای کاربر خوب نوشته شده باید شامل همه چیزهایی باشد که در این صفحه پیدا می کنید و موارد دیگر ، بنابراین توصیه می شود از این آموزش به عنوان یک چک لیست استفاده کنید و نه به عنوان جایگزین / جایگزین دستورالعمل های اصلی توسعه دهنده.
- اکثر کنترل کننده های پرواز یک روش گام به گام برای انتخاب تنظیمات برای پیکربندی خاص UAV ، از جمله کنترل کامل مقادیر PID ، ارائه می دهند. مقادیر مربوط به هر یک (P ، I و D) را می توان برای قاب خاص و سبک پرواز شما تنظیم کرد. از چیزی پایدارتر برای استفاده از پلت فرم در عکاسی هوایی ، تا چیزی شبیه پروازهای ورزشی (تلنگر ، مسابقه هواپیماهای بدون سرنشین و غیره). معمولاً با مقادیر پیش فرض برای هر فیلد شروع می شود ، و اگر تجربه کافی برای تغییر آنها را ندارید ، توصیه می شود همه چیز را تا اولین پرواز بگذارید.
- دفترچه راهنمای کنترل پرواز همچنین باید نحوه تنظیم حداقل دور در دقیقه نیروگاه را مشخص کند ، یعنی سرعت چرخش موتورها هنگام بارگیری را تعیین کند. در ابتدا ، می توانید این مقدار را نسبتاً پایین تنظیم کنید - به اندازه کافی برای دیدن چرخش موتورها ، اما نه آنقدر که پهپادها با نیروی تولید شده حرکت کنند. اگر می توانید این مقدار را تنظیم کنید ، حداکثر رانش باید مطابق با حداکثر مقداری باشد که چوب گاز دنده کنترل شما می تواند ارائه دهد.
- یکی از جنبه هایی که ممکن است در راهنمای کاربر کنترل پرواز بدون ارائه هیچ گونه پیشنهادی مورد بحث قرار گیرد ، حالت پرواز است.با بازگشت به درس 4 ، "حالت پرواز" تعیین می کند که از کدام حسگرها برای تثبیت پهپاد و همچنین عملکرد / هدف آن استفاده می شود. رایج ترین سنسورهای موجود در کنترل کننده هوا ژیروسکوپ ، شتاب سنج ، فشارسنج ، قطب نما و احتمالاً GPS است.
- اگر این اولین هواپیمای بدون سرنشین شما است ، بسیار توصیه می شود که پایدارترین حالت پرواز را در اختیار کنترلر پرواز خود داشته باشید ، که از بیشترین تعداد حسگرهای موجود برای تثبیت پهپاد استفاده می کند. به طور کلی ، این به این دلیل است که ممکن است تنظیمات کنترلر PID از فریم / تنظیمات شما بسیار دور باشد ، به همین دلیل بهتر است مقادیر پیش فرض کنترلر PID را انتخاب کنید. اگر قبلاً پرواز داشته اید ، حالت ACRO (که فقط از ژیروسکوپ استفاده می کند) ممکن است بهترین باشد.
- اکثر کنترل کننده های پرواز به شما امکان می دهند "حالت پرواز" را در پرواز از طریق یک کانال پشتیبان تغییر دهید. به عنوان مثال ، اگر کنترل از راه دور شما دارای 6 کانال است ، ممکن است کانال 5 یا 6 (که اغلب با سوئیچ ها مرتبط هستند) را تعیین کنید تا بتوانید هنگام پرواز با هواپیمای بدون سرنشین حالت پرواز را تغییر دهید. قبل از پرواز ، مطمئن شوید که می دانید کدام سوئیچ با کدام حالت پرواز مطابقت دارد.
- استفاده از پرواز نقطه GPS یا هرگونه عملکرد / سنسور پیچیده تر (به عنوان مثال ، سنسور فاصله اولتراسونیک برای تعیین فاصله تا زمین) بسیار مأیوس می شود تا مطمئن نشوید که پهپاد به خوبی تنظیم شده است. برخی از کتابچه های راهنما فقط از حالت ACRO (آکروباتیک) استفاده می کنند ، اما اگر تجربه پرواز مهمی ندارید ، پرواز در این حالت از نظر فیزیکی برای شما غیرممکن است ، کنترل حالت سخت ترین است ، زیرا تثبیت محروم است.
پیکربندی تجهیزات کنترل
- برخی از کنسول ها دارای حالت های مختلف عملکرد هستند ، مانند هواپیما ، هلیکوپتر ، ماشین و غیره. در 4 (بخش: کنترل) ما چهار کانال اصلی کنترل را مورد بحث قرار دادیم: Throttle ، Yaw ، Pitch و Roll ، که معمولاً مقادیر مربوط به هواپیما یا هلیکوپتر هستند. اگر در دفترچه راهنمای کنترل کننده حالت خاصی برای فرستنده مشخص نشده است ، توصیه می شود از حالت هواپیما استفاده کنید.
- دو نوع کنترل از راه دور وجود دارد: حالت 1 (حالت 1) و حالت 2 (حالت 2). حالت 2 (رایج ترین) در این نوع کنترل Throttle و Yaw است که با کانال / چوب / جوی استیک سمت چپ ، Pitch و Roll با راست مرتبط است. همچنین می توانید با حرکت مستقیم چوبها ، تعیین تکلیف آنها را مجدداً بررسی کنید تا مطمئن شوید مقادیر معکوس نیستند.
- حالتهای فرستنده اغلب سطوح "افست" کانال / سیگنال را برای مناسب تر شدن حرکت برای یک سیستم خاص اضافه می کنند ، با این حال اکثر کنترل کننده های پرواز به هرگونه افست اهمیت می دهند. و به این ترتیب ، مقادیر "خام" را ترجیح می دهند.اگر فرستنده شما هیچ حالت ندارد ، فقط بررسی کنید که کدام کانال / چوب / جوی استیک مسئول کدام است.
- یک فرستنده RC همه منظوره تنها می تواند محدوده ای از سیگنال ها را در هر کانال ارائه دهد ، بنابراین در این درس به شما توصیه می کنیم که بدانید یک فرستنده RC چه محدوده ای از ارزش ها را ارائه می دهد و آیا حداقل و حداکثر مقادیر را می توان تنظیم کرد (یا به عنوان مقادیر یا به عنوان درصدی از محدوده پیش فرض). به عنوان مثال ، کنترل کننده های پرواز مبتنی بر MultiWii به فرستنده هایی نیاز دارند که بتوانند طیف وسیعی از پالس ها را از 500ms تا 2500ms ارائه دهند ، در حالی که تنظیمات پیش فرض فقط 1000ms تا 2000ms است زیرا این یک پیکربندی رایج برای هواپیماهای R / C است. نحوه تنظیم نقاط انتهایی / محدوده سیگنال (در صورت وجود) ، دفترچه راهنمای فرستنده خود را بخوانید.
- اگر کنترلر شما دارای صفحه نمایش LCD است ، اغلب می توانید این کار را از طریق رابط تحت "تنظیمات" انجام دهید.
- "آزمایش تجهیزات کنترل حداکثر. Distance ”به راحتی با کمک دوست / مددکار انجام می شود ، یا زنگ صدا یا سایر بازخوردهای بصری / شنیدنی را به پهپاد RC وصل می کند. برخی از مدلهای بالاتر دارای عملکرد تست محدوده هستند. هدف از این آزمایش این است که ببینیم سیگنال تا کجا پیش می رود تا گیرنده دیگر نتواند آن را دریافت کند. توصیه می شود از آزمایش برد تنها پس از به اصطلاح "پرواز جنگی" استفاده کنید (پرواز رزمی-پهپاد برای عملکرد در فاصله کوتاه ، در خط دید خلبان-هواپیمای بدون سرنشین آزمایش می شود). روش آزمایش برد:
- تجهیزات کنترل و سپس هواپیما را روشن کنید.
- 15 متر عقب بروید و کلید مربوط به زنگ را فعال کنید. شما باید او را بشنوید
- اگر زنگ صدا ندارید ، هواپیما را روشن کنید و مطمئن شوید موتورها در حال کار هستند.
- صدای زنگ را خاموش کنید / پهپاد را مجدداً مسلح کنید
- این مراحل را بیشتر و بیشتر (خط دید) تکرار کنید تا پهپاد به ورودی شما پاسخ دهد.
- این حداکثر فاصله مطلق برای پرواز با هواپیمای بدون سرنشین شما خواهد بود.
- ممکن است فکر کنید که قصد ندارید آنقدر دور پرواز کنید ، اما به یاد داشته باشید که هواپیمای بدون سرنشین در سه محور حرکت می کند و ممکن است مشکلی پیش بیاید.
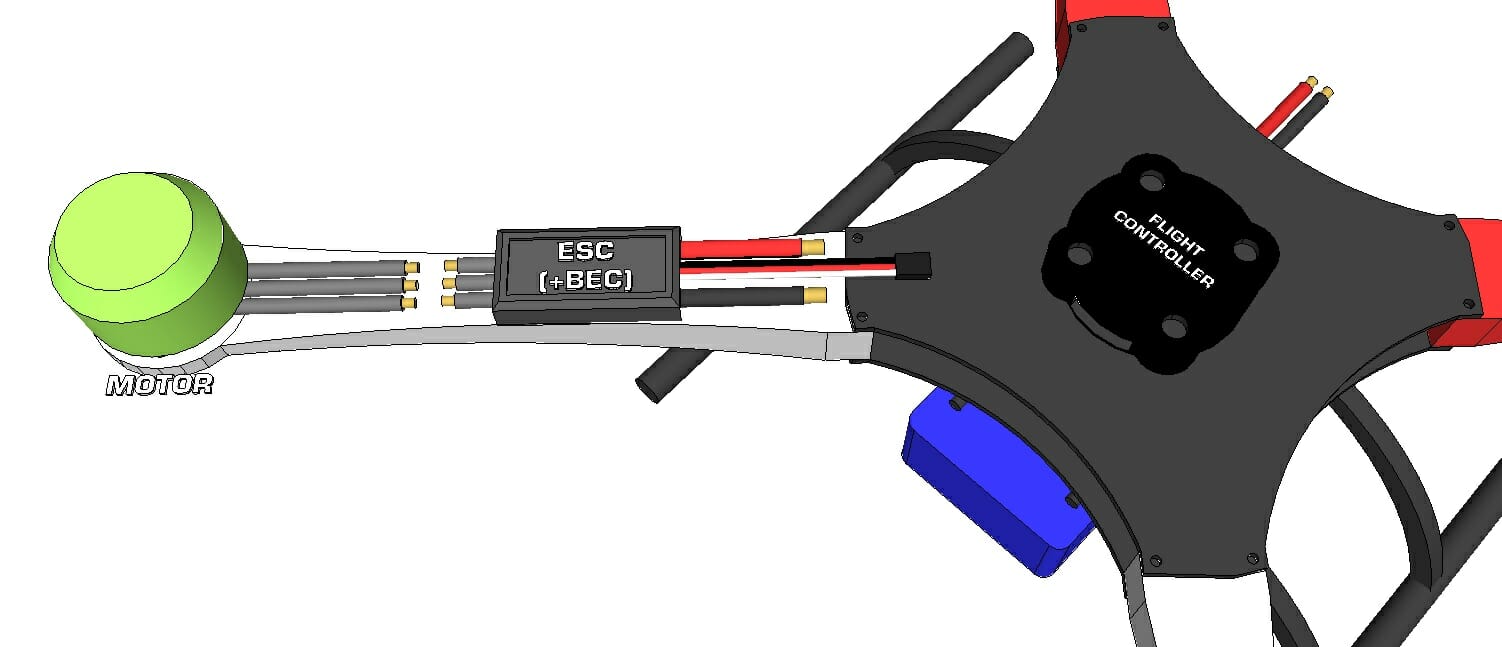
کالیبراسیون ESC
ESC در جعبه کار می کند ، اما سیگنال های (PWM / PWM) مربوط به حداقل و حداکثر گاز سوز ممکن است با آنچه ارائه می دهد مطابقت نداشته باشد. فرستنده شما بنابراین ، شما باید هر ESC را با مقادیر مورد نیاز "آموزش" دهید. مطمئن شوید که پروانه ها روی موتورها نصب نشده اند. به دفترچه راهنمای کنترل کننده پرواز خود مراجعه کنید. پس از برنامه ریزی مجدد ، ESC پیکربندی فعلی خود را حتی زمانی که روشن نیست حفظ می کند. بنابراین ، هر ESC فقط یکبار در حین آزمایش / راه اندازی اولیه برنامه ریزی می شود.
معمولاً بخشی در دفترچه راهنمای کنترل پرواز وجود دارد که نحوه کالیبراسیون ESC و نحوه انجام آن را توضیح می دهد. در غیر اینصورت می توانید یکی از روشهای پیشنهادی زیر را امتحان کنید.بار دیگر ، اگر هنوز پروانه های خود را حذف نکرده اید ، وقت آن است که این کار را انجام دهید.
فرستنده
- یک ESC را به پین "Throttle" گیرنده خود وصل کنید. اگر ESC شما BEC متصل ندارد ، می توانید یک ESC مجهز به BEC را به پین دیگری روی گیرنده (مانند ورودی باتری) وصل کنید تا برق گیرنده را تامین کند.
- ESC را به موتور مناسب وصل کنید (اگر قبلاً وصل نشده باشد).
- چوب / جوی استیک مربوط به "Throttle" را روی حداکثر (معمولاً چوب / جوی استیک سمت چپ و کامل به جلو / بالا) تنظیم کنید ، سپس فرستنده را روشن کنید.
- باتری LiPo را به برد توزیع برق یا مستقیماً به این ESC وصل کنید (اگر اتصالات سازگار هستند).
- موتور باید سه بار (11.1V LiPo) بوق بزند و سپس یک مکث کوتاه و دو بوق کوتاه (که حداکثر بوق است) بوق بزند.
- بلافاصله پس از بوق کوتاه ، چوب / جوی استیک دریچه گاز را به پایین ترین موقعیت (که حداقل بوق است) منتقل کنید.
- موتور باید سه بار (11.1V LiPo) بوق و به دنبال آن یک بوق بلند بوق بزند.
- محدوده دریچه گاز برای این ESC اکنون تنظیم شده است ، تا زمانی که همه ESC ها کالیبره شوند ، به محدوده بعدی بروید.
سایر روشها
دستورالعمل های راهنمای کاربر محصول را دنبال کنید تا حداقل / حداکثر محدوده ورودی ESC با آنچه از فرستنده دریافت می کند مطابقت داشته باشد.
- USB: برخی از مدل های ESC از طریق USB ، مستقل یا با آداپتور قابل برنامه ریزی هستند.
- هیئت برنامه نویسی: هیئت برنامه نویسی ESC خارجی ، تقریباً با هر ESC قابل استفاده است و یک دستگاه مستقل است.
- میکروکنترلر: این روش به طور گسترده استفاده نمی شود ، اما مطمئناً می توان ESC را با میکروکنترلر برنامه ریزی مجدد کرد اگر کد صحیح داشته باشید و بتوانید به درستی وصل شوید.
- Flight Controller: برخی از کنترل کننده های پرواز به شما امکان می دهند ESC ها را از طریق رابط برنامه نویسی خود کالیبره یا برنامه ریزی کنید. دستورالعمل های کنترل پرواز خود را بخوانید تا ببینید آیا این امکان وجود دارد.
موتور و روتور اصلی (ملخ). جهت.
اکنون آماده نصب ملخ ها هستید. بیایید به درس 3 برگردیم ، که در مورد جهت روتور اصلی برای ایجاد رانش بحث می کند. همه پروانه ها دارای یک چرخش بالا و پایین و جهت چرخش CW (در جهت عقربه های ساعت) و CCW (خلاف جهت عقربه های ساعت) هستند. معمولاً متنی در بالای یک پروفیل وجود دارد که نشان دهنده ارتفاع و قطر آن است. هنگامی که پروانه بر روی محور موتور نصب می شود ، این قسمت فوقانی بدون توجه به اینکه موتور در بالای پرتو هواپیمای بدون سرنشین یا در پایین پهپاد نصب شده است ، به سمت آسمان است.

چک لیست پیش از پرواز خلبان
اگرچه هواپیمای بدون سرنشین به اندازه یک هواپیمای تجاری واقعی پیچیده یا خطرناک نیست ، شما - به عنوان خلبان و باید یک چک لیست قبل از پرواز داشته باشید تا مطمئن شوید پرواز آینده هیچ گونه خطری برای افراد یا اموال نخواهد داشت. لیست زیر فقط موارد ضروری را پوشش می دهد و باید قبل از هر پرواز (نه تنها قبل از اولین پرواز) انجام شود.
- اطمینان حاصل کنید که هر کدام از وسایل دیداری را در اختیار دارید تا مشخص شود کدام طرف هواپیمای بدون سرنشین شما در جلو قرار دارد. حداقل ، نوار رنگی را به دو تیر جلو اضافه کنید.
- مطمئن شوید که باتری تجهیزات کنترل شارژ شده است.
- پهپاد را به آرامی تکان دهید - هیچ چیز نباید شل شود ، تکان بخورد یا روی زمین بیفتد. شما هرگز نمی دانید که چه چیزی ممکن است در نتیجه فرود سخت در پرواز قبلی جابجا شده یا شکسته شود.
- مطمئن شوید که پروانه ها همچنان محکم به هم متصل شده اند.
- ابتدا تجهیزات کنترل را روشن کنید ، سپس هواپیمای بدون سرنشین را روشن کنید (دستان خود را از روتورها دور نگه دارید).
- مطمئن شوید که می توانید موتورها را به طور قابل اطمینان مسلح و مسلح کنید (هنگام چرخش در دور کم باید در دور کم بچرخند و در هنگام خلع سلاح چرخش را متوقف کنند]
- مطمئن شوید که کالیبره می کنید یا سنسورها خوب هستند کالیبره شده (شما باید این کار را به طور منظم انجام دهید)
- محدوده فرستنده را بررسی کنید.
- اطمینان حاصل کنید که منطقه پرواز کاملاً روشن است و اگر کسی در آن است ، به او اطلاع دهید ، مخصوصاً کودکان کنجکاو. شما در حال پرواز با پهپاد هستید و تا زمانی که هواپیمای بدون سرنشین با موتورهای کامل متوقف نشود ، نباید به آن نزدیک شوید.

آزمایش
تا زمانی که به توانایی های خود به عنوان طراح خلبان و هواپیمای بدون سرنشین اطمینان کافی نداشته باشید ، روش زیر است: برای همه هواپیماهای بدون سرنشین قبل از اولین پرواز توصیه می شود.
- موتورها را روشن کرده و مطمئن شوید که آنها در جهت صحیح می چرخند همانطور که در دفترچه راهنمای کنترل پرواز توضیح داده شده است.
- چوب / جوی استیک دریچه گاز را خیلی آهسته بالا بیاورید و مطمئن شوید که پروانه ها هوا را به سمت زمین فشار می دهند. استفاده از دستمال کاغذی یک گزینه مطمئن برای بازرسی بصری است.
- چوب / جوی استیک Pitch را بسیار با دقت به جلو / عقب حرکت دهید تا مطمئن شوید پهپاد به درستی به جلو / عقب متمایل است.
- با دقت چوب / جوی استیک رول را به هر طرف منتقل کنید تا مطمئن شوید که هواپیمای بدون سرنشین به درستی پاسخ می دهد.
اگر هواپیمای بدون سرنشین رفتار مناسبی نداشته باشد ، دلایل احتمالی زیادی وجود دارد که از جمله آنها می توان به موارد زیر اشاره کرد:
- یک یا چند موتور در جهت اشتباه می چرخند.
- کنترل کننده هواپیما به درستی نصب نشده است و آنچه که "جلو" می داند با پهپاد فیزیکی شما متفاوت است.
- یک یا چند مخاطب بین گیرنده و کنترل کننده پرواز به درستی یا حتی در مکان اشتباه متصل نشده اند.
- شاید همه چیز به درستی تنظیم شده باشد ، خیلی سریع یا خیلی ناگهانی که به ورودی کاربر پاسخ ندهد.
برنامه اضطراری
که تازه شروع به کار در میدان و / یا با یک هواپیمای بدون سرنشین جدید کرده است. لیست زیر به شما این امکان را می دهد تا در مورد آنها فکر کنید و ایده هایی در مورد نحوه و چگونگی پاسخ به خلبانان مشتاق ارائه دهید. تصمیم به صورت موردی گرفته می شود و در برخی شرایط ممکن است با آنچه در اینجا پیشنهاد می شود مغایرت داشته باشد. بنابراین خودتان را بشناسید ، محیط اطراف خود را بشناسید و مراقب باشید! تقریباً در همه موارد ، از دست دادن پهپاد بهتر از خطر برخورد با مردم یا اموال است.
هواپیمای بدون سرنشین بسیار دور است و شما نمی دانید جهت آن چیست.
- دریچه گاز را کاهش دهید و در صورت پاسخ دادن هواپیمای بدون سرنشین (بررسی وجود اتصال) را مشاهده کنید.
- اگر هواپیمای بدون سرنشین به گاز پاسخ می دهد ، سعی کنید همان جا فرود بیایید (اگر می توانید).
- اگر این مکان برای فرود مناسب نیست ، سعی کنید با دقت پهپاد را به جلو ببرید (هیچ چیز شدید نیست) ، و اگر پهپاد با تکیه بر موقعیت شما واکنش نشان دهد ، حرکت به چپ یا راست در آسمان به شما امکان می دهد جهت گیری آن اگر به نظر نمی رسد که به چپ یا راست حرکت می کند ، ممکن است به سمت شما یا دور از شما حرکت کند ، بنابراین کاری را که اخیراً انجام داده اید واگرد کرده و با تمیز کردن چپ سعی کنید.
پهپاد ناگهان به شدت از مسیر خارج می شود (با یا بدون دلیل).
- اگر در خلبانی (برای بازگرداندن آن) مهارت ندارید ، دریچه گاز را به طور کامل پرتاب کرده و بگذارید بیفتد: در این حالت ، تفکر در مورد اقدامات رادیکال ممکن است منجر به این شود که بینایی خود را از دست بدهید. پهپاد یا حتی بدتر ، پهپاد شروع به صعود می کند تا از فاصله بیشتری سقوط کند.
هواپیمای بدون سرنشین به سرعت در حال حرکت به سمت مردم است.
- حداکثر گاز به طوری که ارتفاع می گیرد و از روی آنها پرواز می کند. هواپیمای بدون سرنشین شما احتمالاً هنوز در جهت کلی صحیح قرار دارد ، بنابراین بهتر است هواپیمای بدون سرنشین را از دست بدهید تا اینکه به سمت افراد پرواز کنید.
- پس از رسیدن به ارتفاع مطلوب ، سعی کنید کنترل را دوباره به دست آورید ، سپس آن را طوری قرار دهید که بالاتر از منطقه فرود روشن باشد.
هواپیمای بدون سرنشین به سرعت به سمت شما حرکت می کند.
- گاز به صفر ؛ بگذارید او زمین را بکوبد تا اینکه به سر شما پرواز کند.
هواپیمای بدون سرنشین به ورودی تجهیزات کنترل پاسخ نمی دهد.
- در این صورت ، هیچ کاری نمی توانید انجام دهید. اگر پهپاد شما هنوز در هوا است ، ممکن است باتری های کنترل از راه دور شما تمام شوند.
هواپیمای بدون سرنشین پروانه خود را از دست می دهد.
- از بین رفتن پروانه هم بر رانش و هم بر خم شدن تأثیر می گذارد. سعی کنید ابتدا خمیازه را صاف کنید (احتمالاً باید چوب / جوی استیک متصل به خمیازه را در موقعیت شدید نگه دارید) ، و سپس در همان زمان با دقت دریچه گاز / دریچه گاز را برای جلوگیری از برخورد به بالا حرکت دهید ، سپس دریچه گاز را پایین بیاورید به
اولین پرواز
صرف نظر از تجربه پرواز قبلی شما ، اولین پرواز شما ، به ویژه با یک پهپاد سفارشی چند موتوره ، باید تا حد ممکن محتاطانه انجام شود. هدف از اولین پرواز این است که مطمئن شوید همه چیز به درستی تنظیم شده است. و همچنین شناسایی مشکلات جدی.
- مکان: منطقه باز ، دور از ساختمانها ، مردم و اموال. به عنوان مثال: زمین خالی فوتبال ، زمین بیس بال و غیره ایده آل خواهد بود. اصلا نباید باد بیاید
- چک لیست قبل از پرواز خلبان را بررسی کنید.
- حدود 2 متر دورتر از هواپیمای بدون سرنشین بایستید و قسمت جلوی هواپیمای بدون سرنشین رو به شما باشد.
- موتورها را مسلح کنید.
- چوب / جوی استیک گاز را به آرامی به سمت بالا حرکت دهید. به نقطه ای برسید که پهپاد آماده پرواز است. ممکن است برخی از اثرات زمینی وجود داشته باشد که باعث جهش اندک پهپاد می شود ، اما نگران نباشید.
- دریچه گاز را اضافه کنید تا هواپیمای بدون سرنشین از زمین خارج شود و به کنترل ها عادت کنید - سعی کنید آن را در شعاع خاصی نگه دارید و ببینید که چگونه به حرکات چوب / جوی استیک شما واکنش نشان می دهد.
- حرکات کوچک ، تدریجی و روان انجام دهید - هیچ چیز خیلی ناگهانی نیست. برای جلوگیری از حادثه ، چوب گاز را پایین بیاورید.
- اگر هواپیمای بدون سرنشین شما مطابق انتظار رفتار نکند (به عنوان مثال ، حرکت محور "Pitch" به گام آن و همچنین چپ به راست منتهی می شود) ، چیزی اشتباه است ، و شما باید از علل مشکلات شناسایی شده...
- اگر پهپاد مطابق انتظار رفتار کند ، وظیفه شما این است که موقعیت خود را به طور پیوسته در ارتفاع 1.2-2 متر از سطح زمین حفظ کنید. خیلی زود عصبانی نشو


.پروازهای اضافی
اکنون که مشکلات و پروازها را برطرف کرده اید به راحتی در محیط کنترل شده ، می توانید پرواز دوم را ادامه دهید.
- از آنجا که هواپیمای بدون سرنشین هنوز به طور کامل آزمایش نشده است ، پیشنهاد می کنیم برای اولین پرواز مراحل کامل قبل از پرواز را انجام دهید ، که نباید زیاد طول بکشد.
- با استفاده از حرکات روان ، با نحوه برخورد پهپاد با حرکات چوب / چوب خود در فاصله ایمن عادت کنید.
- سازگاری با هدایت هواپیمای بدون سرنشین باید بدون کمک FPV و حسگرهای مختلف انجام شود.







