
- 1 مقدمه
- 2 برنامه DJI Go چیست؟
- 3 صفحه اصلی پرواز
- 4 وضعیت هواپیما
- 4.1 قطب نما
- 4.2 حالت کنترل از راه دور
- 5 تنظیمات اصلی کنترلر
- 5.1 تنظیمات نقطه اصلی
- 5.2 حالت پرواز متعدد
- 5.3 بازگشت به ارتفاع خانه
- 5.4 حالت مبتدی
- 5.5 حداکثر ارتفاع پرواز
- 5.6 حداکثر فاصله
- 5.7 تنظیمات پیشرفته
- 6 تنظیمات ناوبری بصری
- 6.1 فعال کردن اجتناب از موانع
- 6.2 فعال کردن اجتناب از موانع افقی در TapFly
- 6.3 فعال کردن پرواز به عقب
- 6.4 جلوگیری از موانع را در ActiveTrack فعال کنید
- 6.5 نمودار رادار نمایش
- 6.6 تنظیمات پیشرفته
- 7 تنظیمات کنترل از راه دور
- 7.1 کالیبراسیون کنترل از راه دور
- 7.2 حالت چوب
- 7.3 سفارشی سازی دکمه
- 7.4 اتصال کنترل از راه دور
- 8 تنظیمات انتقال تصویر
- 9 باتری هواپیما
- 9.1 باتری بسیار کم هشدار
- 9.2 هشدار باتری کم
- 9.3 بازگشت هوشمند به خانه
- 9.4 پرواز زمان
- 9.5 تنظیمات پیشرفته
- 10 تنظیمات گیمبال
- 10.1 حالت گیمبال
- 10.2 تنظیمات پیشرفته
- 10.3 تنظیم گیمبال رول
- 10.4 کالیبراسیون خودکار گیمبال
- 11 تنظیمات عمومی
- 11.1 واحد
- 11.2 دوربین
- 11.3 قله آستانه تمرکز
- 11.4 اقدام بلند پرس
- 11.5 پخش مستقیم
- 11.6 نقشه
- 11.7 پاک کردن مسیر پرواز
- 11.8 ویدئو کش
- 11.9 حافظه پنهان هنگام فیلمبرداری
- 11.10 حداکثر ظرفیت ذخیره سازی ویدئو
- 11.11 پاک کردن حافظه پنهان به صورت خودکار
- ) 11.12 ضبط صدا با حافظه پنهان ویدئویی
- 11.13 پاک کردن حافظه پنهان ویدئو
- 11.14 هشدارها
- 11.15 پاک کردن همه هشدارها
- 11.16 سایر
- 12 سمت راست صفحه اصلی پرواز
- 12.1 شیب نشانگر دوربین
- 12.2 سوئیچ عکس / فیلم
- 12.3 دکمه شاتر / ضبط ویدئو
- 12.4 گالری
- 12.5 تنظیمات دوربین
- 13 سمت چپ صفحه اصلی پرواز
- 13.1 خودکار برخاست
- 13.2 برو به خانه
- 13.3 حالت پرواز هوشمند
- 14 نقشه
- 14.1 حالت نمایش نقشه
- 14.2 قطب نما
- 14.3 نقشه مرکزی
- 14.4 NFZ
- 14.5 تله متری
- 15 نتیجه گیری
مقدمه
در این کتابچه راهنمای شفاهی ، خواننده را با برنامه تلفن همراه DJI Go 4 آشنا می کنیم.بیایید نگاهی به هر منو ، تنظیمات و دکمه ها بیندازیم تا به شما در درک بهتر این برنامه فوق العاده قدرتمند و در عین حال پیچیده کمک کنیم. اگر قبلاً پهپادهای DJI دارید مانند Spark ، Mavic Air ، Mavic Pro ( PlatinumMavic 2 ، Phantom 4 ، Phantom 4 Advanced ، Phantom 4 Pro ، Phantom 4 Pro V2.0 ، Inspire 2 پس این راهنما برای شما است.
به عنوان مثال ، پس از مطالعه کاربر می داند:
- نحوه تغییر حساسیت دسته های کنترل.
- نحوه رفع مشکلات تاخیر جریان ویدئو.
- چرا از تنظیمات پیکربندی 1 ، 2 و 3 استفاده کنید
- IMU چیست و چرا نظارت بر وضعیت آن مهم است.
- چرا تنظیم "EV" می تواند برای تنظیم نوردهی مفید باشد.
- آنچه تنظیم "عنوان ویدیو" انجام می دهد.
- چرا "رمزگشایی سخت افزار" را فعال کنید.
- دکمه های C1 و C2 برای چیست؟
- چرا "Cache Map Data" برای دستگاه هایی که اتصال تلفن همراه ندارند مفید است.
در زیر ، پاسخ این س andالات و س questionsالات دیگر را خواهید یافت. ما تضمین می کنیم که پس از خواندن ، چیزهای زیادی خواهید آموخت و حتی اعتماد به نفس بیشتری خواهید داشت و همچنین یک خلبان پیشرفته هواپیمای بدون سرنشین.
![]()
توجه! بسته به مدل پهپادی که استفاده می کنید ، برخی از منوها و تنظیمات ممکن است کمی متفاوت به نظر برسند ، اما مطمئن باشید موارد اصلی منو ، عملکردها و مفاهیم با هم تداخل دارند.
برنامه DJI Go چیست؟
برنامه DJI Go نرم افزاری است که به شما امکان می دهد رایانه لوحی / تلفن هوشمند خود را به کنترل کننده های کنترل از راه دور هواپیماهای بدون سرنشین DJI بالا
![]()
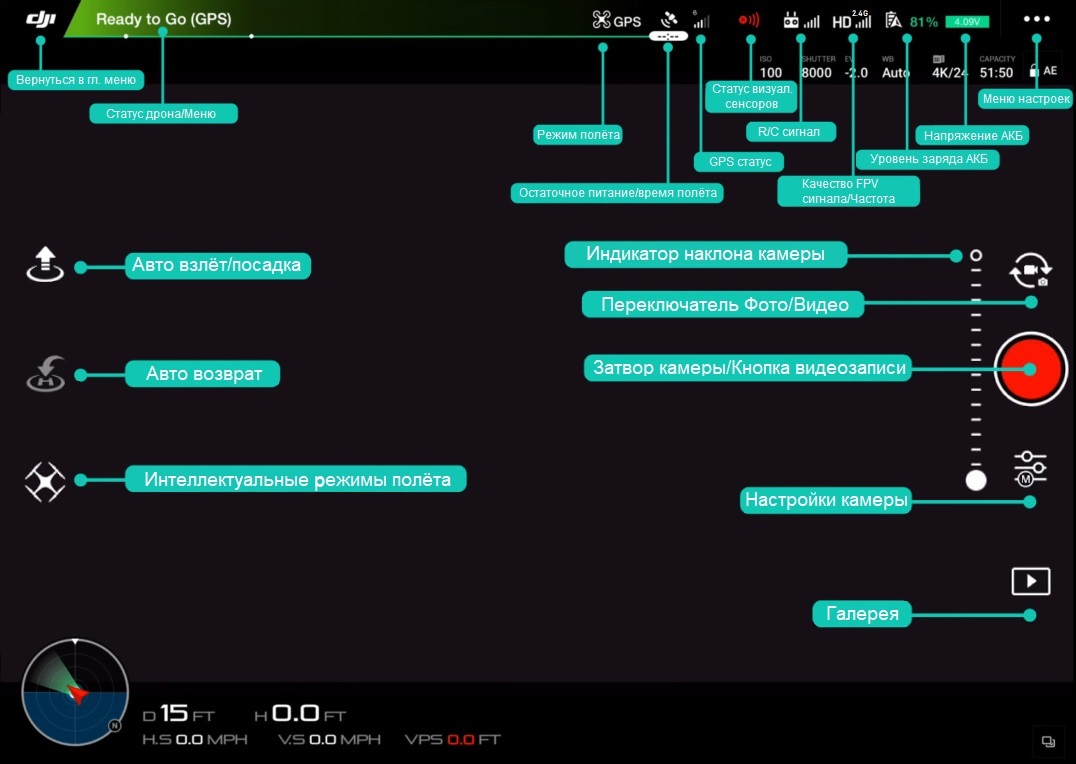
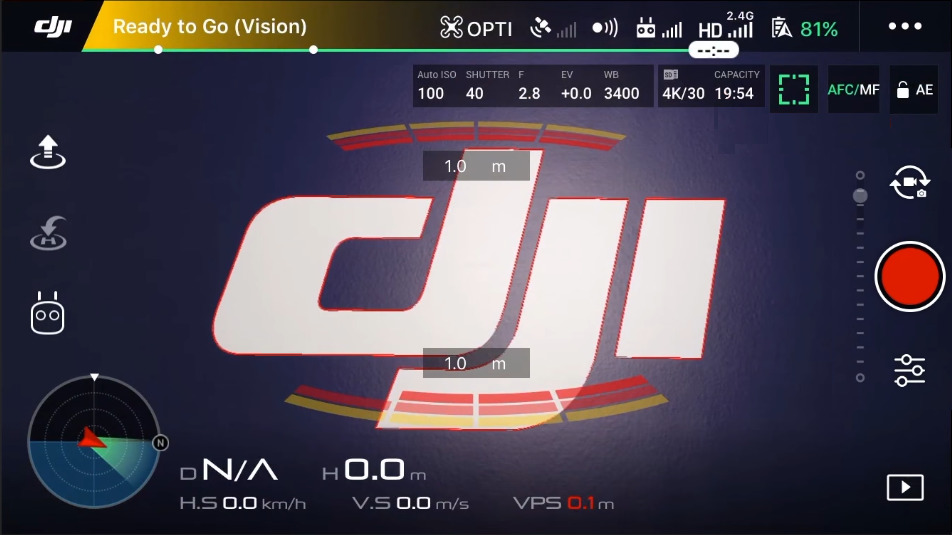
صفحه اصلی پرواز
اطلاعات خلبان در طول پرواز و تیراندازی ، و همچنین تعدادی دکمه ها / نمادهای مجازی اضافی برای دسترسی سریع به تنظیمات / عملکردهای اصلی پهپاد و کنترل دوربین.
وضعیت هواپیما
وضعیت هواپیما - این جایی است توصیه می شود بعد از بازرسی بصری هواپیمای بدون سرنشین قبل از پرواز وارد شوید. این منو نمای کلی عملکرد و وضعیت هر زیر سیستم پهپاد / کنترل از راه دور (حالت پرواز فعلی ، وضعیت سنسورهای تصویربرداری ، قطب نما ، IMU ، باتری و غیره) را ارائه می دهد.برای ورود به این منو ، روی نماد " Ready to Goقرمزرا نمی بینید ، به احتمال زیاد این بدان معناست که پهپاد به طور عادی کار می کند و آماده پرواز است.
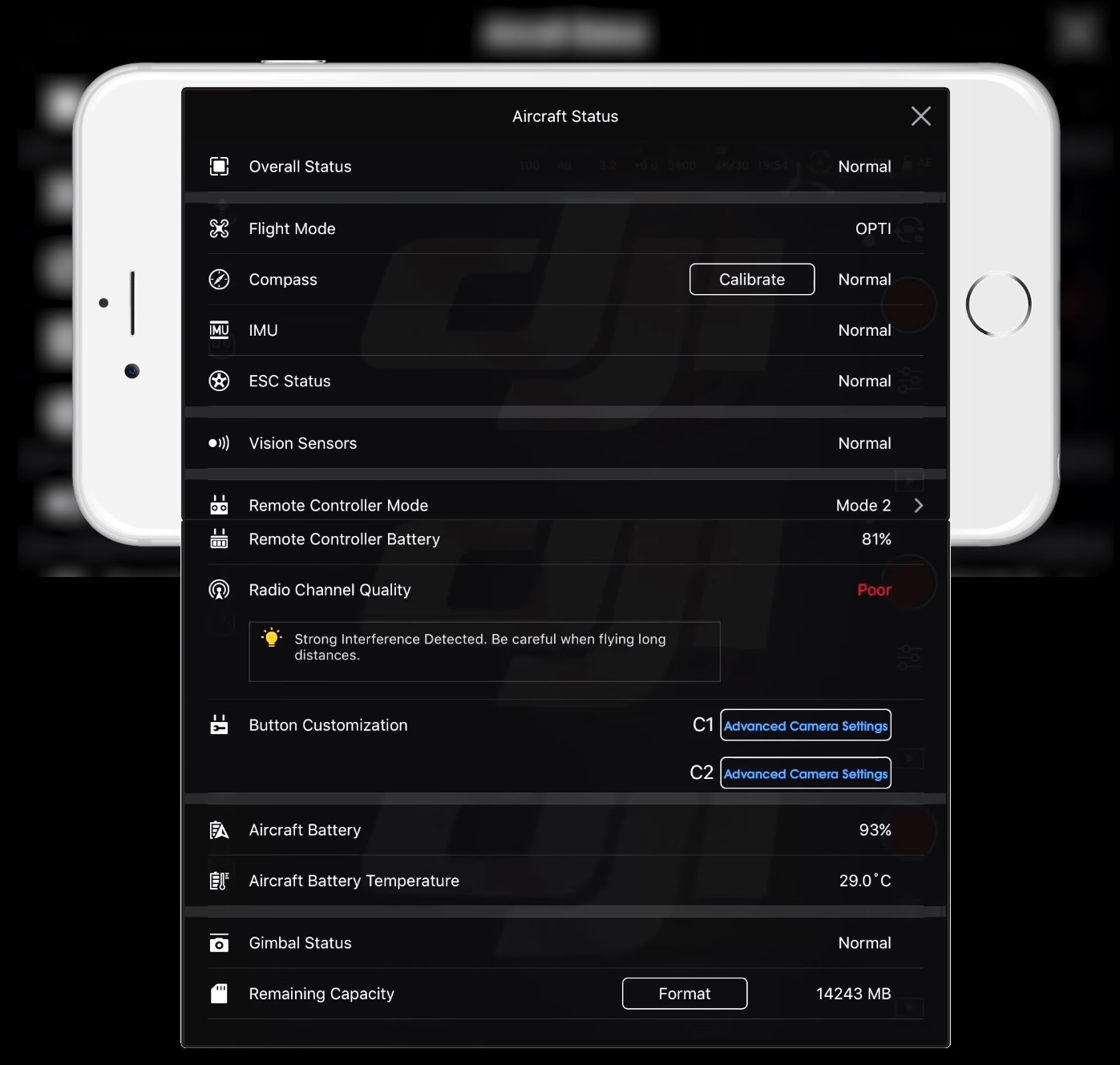
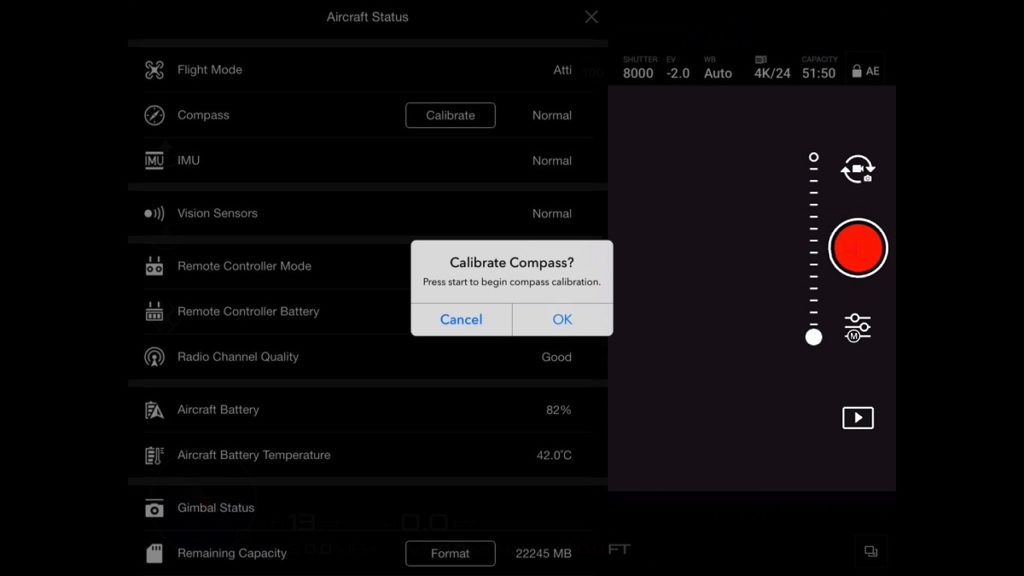
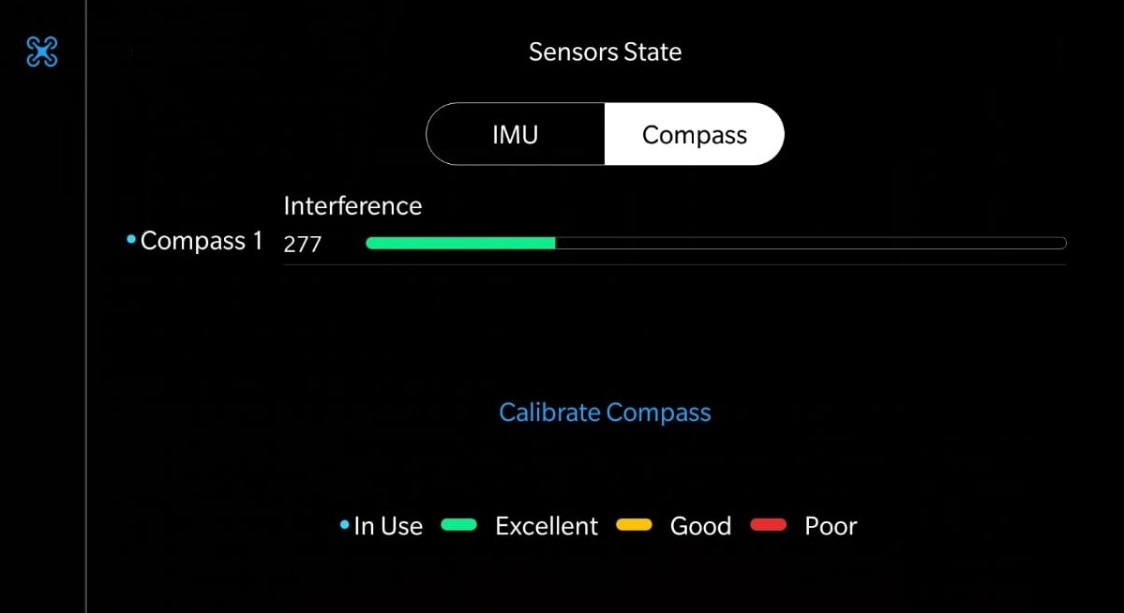
قطب نما
قطب نما یکی از مهمترین حسگرهایی است که همیشه باید آن را بررسی کنید زیرا او مسئول جهت گیری پهپاد در فضا است. توصیه می شود همیشه قطب نمای هواپیمای بدون سرنشین را در هر مکان پرتاب جدید کالیبره کنید. این به این دلیل است که قطب نما نسبت به تداخل الکترومغناطیسی بسیار حساس است ، که می تواند منجر به خرابی سنسور شود ، که اغلب منجر به بدتر شدن عملکرد پرواز یا حتی شکست در عملکرد می شود. بنابراین ، کالیبراسیون منظم قطب نما قبل از پرتاب در مکان جدید عملکرد مطلوب پهپاد را حفظ می کند. برای کالیبره کردن قطب نما ، روی نماد "Calibrate" ضربه بزنید و دستورالعمل های روی صفحه را دنبال کنید.
نکات مهم:
- قطب نما را در نزدیک منابع قوی تداخل مغناطیسی مانند مگنتیت ، سازه های فلزی زیرزمینی ، پارکینگ ها کالیبره نکنید.
- قطب نما را در نزدیکی اشیا / اشیای فلزی بزرگ کالیبره نکنید.
- قطب نما را در داخل خانه کالیبره نکنید.
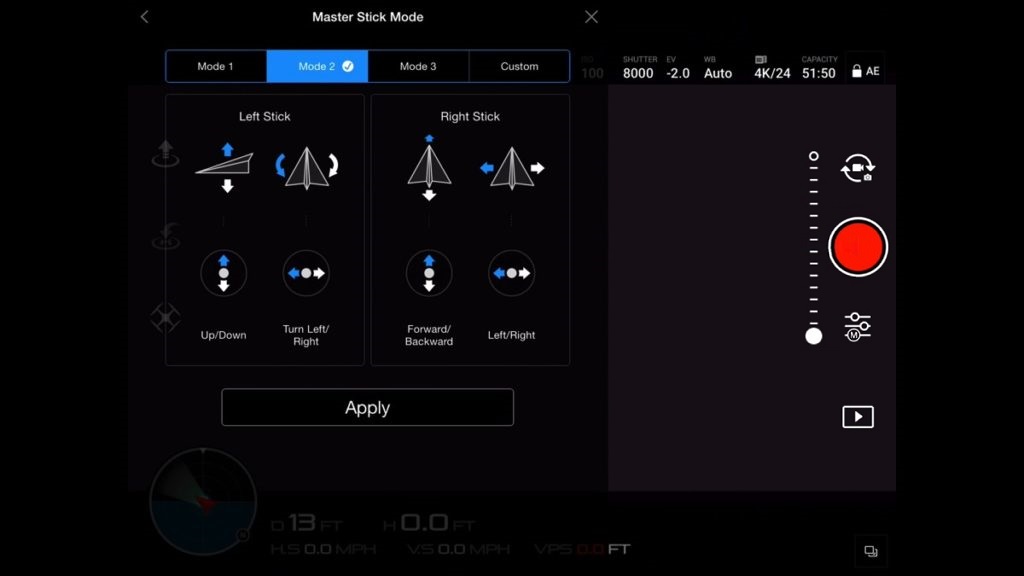
حالت کنترل از راه دور
حالت کنترل از راه دور - معمولاً به طور پیش فرض روی حالت 2 تنظیم شده است. این بدان معناست که چوب چپ (جوی استیک) کنترل پنل وظیفه برخاستن ، پایین آوردن و چرخاندن پهپاد حول محور خود و چوب سمت راست (جوی استیک) وظیفه حرکت به جلو ، عقب و چپ / راست را بر عهده دارد. روش تغییر حالتها یک بار انجام می شود و دفعه بعد که پهپاد روشن می شود ، نیازی به تغییر دوم ندارد.
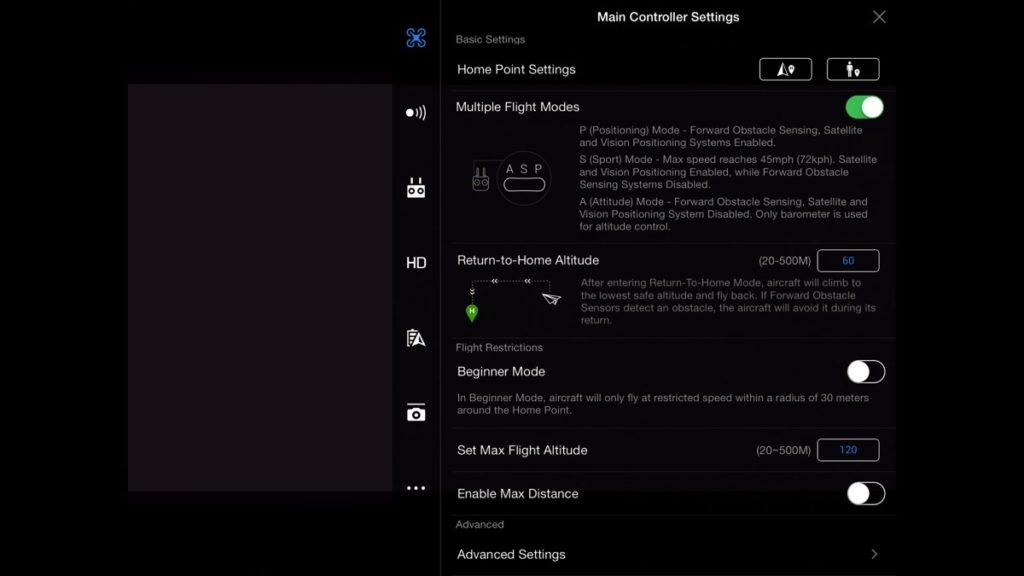
تنظیمات کنترلر اصلی
تنظیمات کنترلر اصلی تنظیمات کنترلر) - برای ورود به منو ، روی نماد به شکل سه نقطه (…)
) در سمت چپ منو ضربه بزنید. در اینجا می توانید موارد زیر را بیابید:
- تنظیمات نقطه اصلی
- فعال / تغییر حالت های پرواز "حالت های پرواز متعدد"
- فعال / غیرفعال کردن حالت حالت مبتدی "
- تنظیم حداکثر ارتفاع پرواز و حداکثر فاصله
- تنظیمات پیشرفته
موارد زیر جزئیات بیشتری در مورد هر تنظیم و زیرمنو دارد:
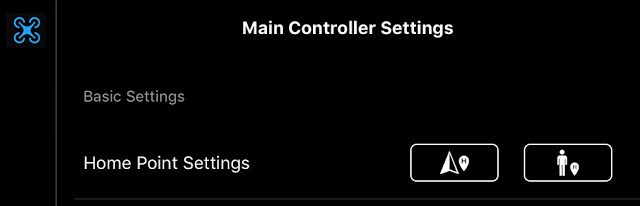
تنظیمات نقطه اصلی
تنظیمات نقطه اصلی - این مورد نقطه بازگشت به خانه را پیکربندی می کند ، یعنی جایی که پهپاد باید برگردد (در موارد: قطع ارتباط بین هواپیمای بدون سرنشین و کنترل از راه دور / عدم شارژ کافی باتری / پس از فشار دادن دکمه RTH).
دو گزینه موجود است:
- نماد پیکان = اگر این روش بازگشت را انتخاب کنید ، نقطه بازگشت فعلی محل برخاستن تلقی شود وقتی فشرده می شود ، سیستم هواپیمای بدون سرنشین می پرسد: "موقعیت فعلی هواپیما را به عنوان نقطه اصلی تنظیم کنید؟" روی OK کلیک کنید.
- نماد با یک مرد کوچک = اگر این روش بازگشت را انتخاب کنید ، هواپیمای بدون سرنشین به مکان کنونی کنترل از راه دور باز می گردد. اگر خلبان هواپیمای بدون سرنشین را از جسم متحرک مانند قایق یا ماشین کنترل کند ، این روش مناسب است.
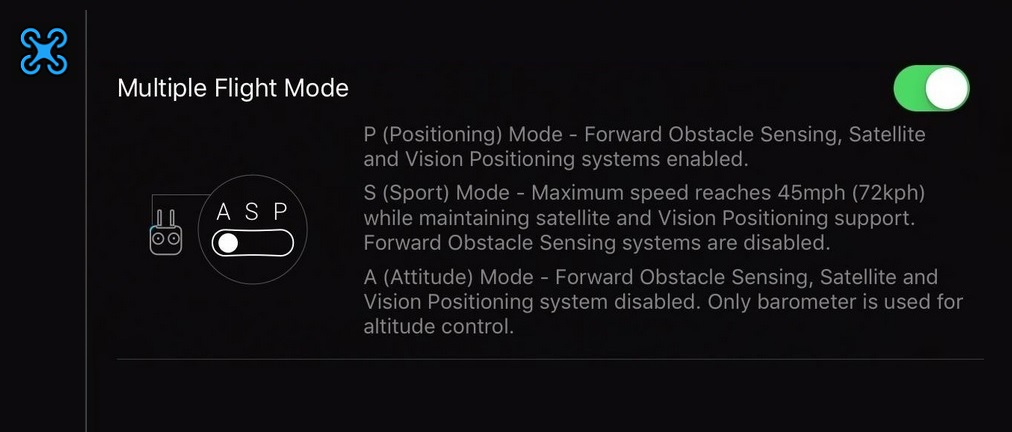
حالت های متعدد پرواز
حالت های پرواز متعدد - این تنظیم به شما امکان می دهد بین سه حالت پرواز ممکن:
- حالت P (موقعیت یابی) یا حالت موقعیت یابی (حالت P) - در این حالت ، همه سنسورهای هواپیمای بدون سرنشین روشن هستند ، که منجر به بیشتر "متوقف" ، اما پرواز پایدار. در این حالت ، اگر خلبان چوب ها (جوی استیک های کنترلی) را رها کند ، به لطف موقعیت یابی ماهواره GPS / GLONASS ، پهپاد به طور خودکار ترمز می کند و سپس حرکت می کند و موقعیت را حفظ می کند.
- حالت S (ورزش) یا حالت ورزشی - پتانسیل کامل پهپاد را آزاد می کند و به آن اجازه می دهد حداکثر را توسعه دهد. سرعت پرواز ، در حالی که ماهواره (GPS / GLONASS) و موقعیت بصری (مجموعه ای از سنسورها در پایین هواپیمای بدون سرنشین) همچنان فعال است. اما به خاطر داشته باشید که در این حالت سیستم اجتناب و جلوگیری از موانع غیرفعال می شود!
- حالت A (Attitude / ATTI) - در حالت A همه سنسورهای هواپیما غیرفعال هستند ، فقط فشارسنج فعال است (برای کنترل و حفظ ارتفاع استفاده می شود) ، که منجر به ناپایدارتر پرواز می شود / حرکت می کند ، زیرا باد و جریان هوای آن بر هواپیمای بدون سرنشین تأثیر می گذارد. به عبارت دیگر ، "ترمز خودکار" وجود ندارد. برای متوقف کردن پهپاد و حفظ موقعیت آن ، خلبان باید با حرکت دادن میله های کنترل ، پهپاد را به طور مستقل کنترل کند.
اطلاعات
A-Mode برای خلبانان باتجربه مفید است ، به عنوان مثال وقتی:
- هواپیمای بدون سرنشین در مکانهایی با استقبال ضعیف پرتاب می شود ، یا در مواردی که هیچ پوشش ماهواره ای وجود ندارد
- برای اطمینان از مانور / ترمز روان در حین بررسی های هوایی
- به عنوان یک حالت ایمن برای خرابی هواپیمای بدون سرنشین در صورت خرابی.
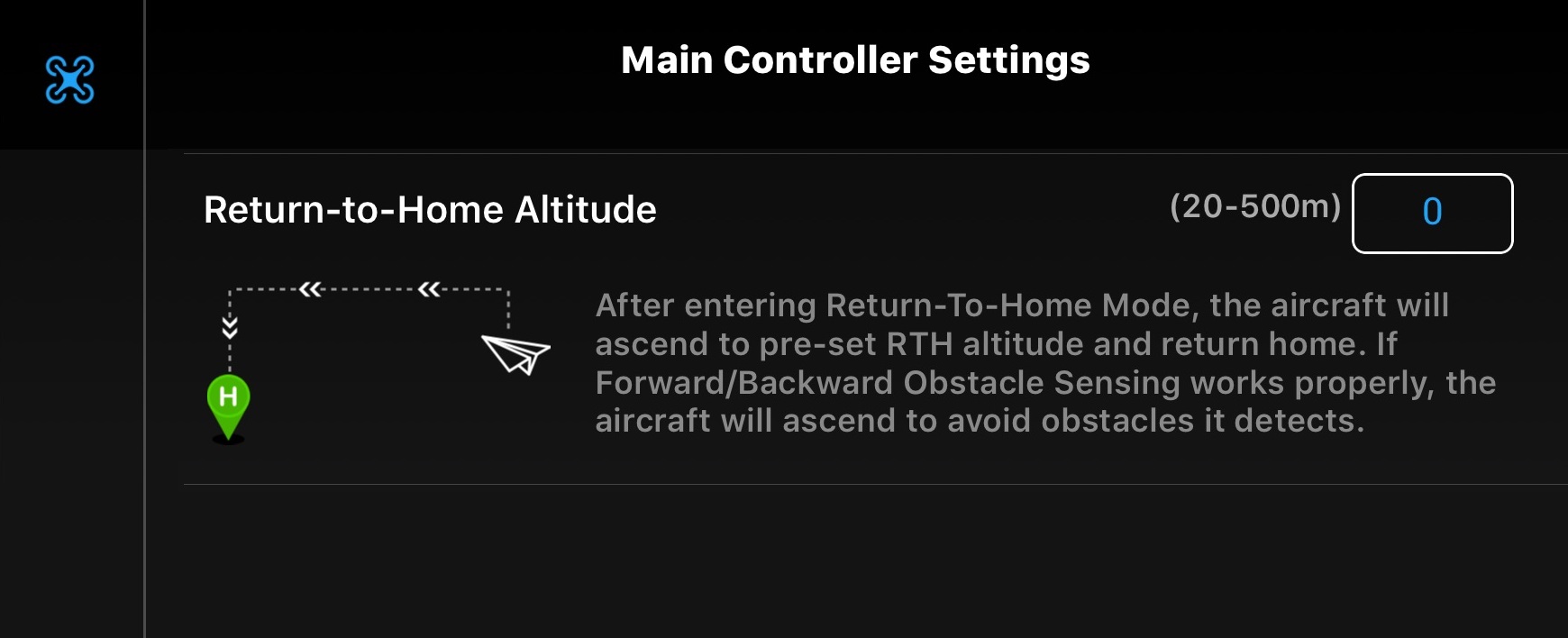
بازگشت به ارتفاع خانه
بازگشت به ارتفاع خانه - تنظیم ارتفاع که در آن پهپاد بازگشت خودکار را انجام می دهد (در موارد: قطع ارتباط بین هواپیمای بدون سرنشین و کنترل از راه دور / شارژ ناکافی باتری / پس از فشار دادن دکمه RTH).
به عنوان مثال ، اگر اتصال قطع شود ، فرقی نمی کند که پرواز در چه ارتفاعی انجام شده باشد ، هواپیمای بدون سرنشین به طور خودکار به حالت بازگشت می رود ، به ارتفاع مشخص شده می رود و تنها پس از آن بازگشت خودکار را انجام می دهد.
نکات
- ارتفاع را می توان 60 متر تنظیم کرد.در بیشتر موارد ، این ارتفاع بسیار بیشتر از درخت یا ساختمان معمولی است. اما در هر صورت ، در هر مکان جدید ، قبل از شروع ، باید ارتفاع درختان ، ساختمانها و موانع احتمالی را بررسی کنید و در صورت لزوم تغییر تنظیمات فعلی "بازگشت به ارتفاع خانه".
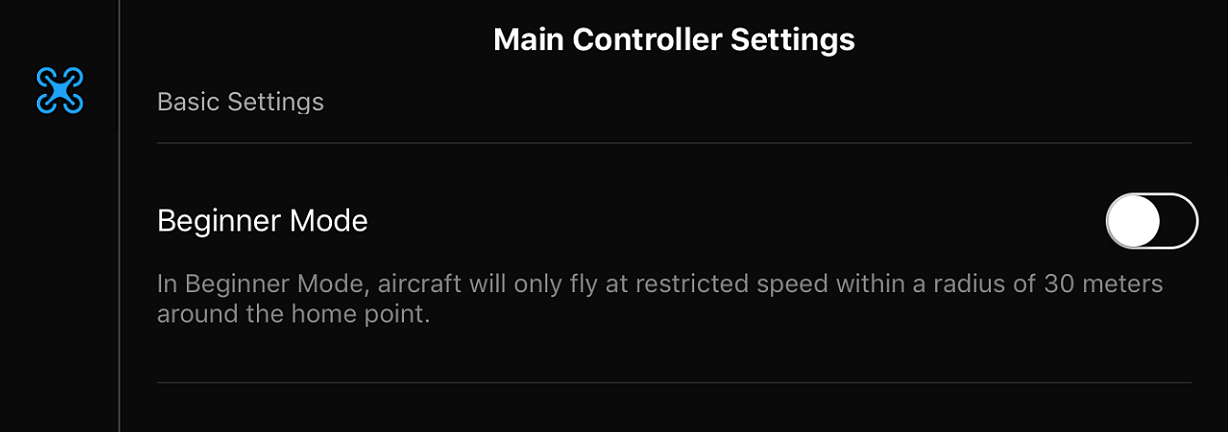
حالت مبتدی
حالت مبتدی - توصیه می شود اگر کاربر برای اولین بار هواپیمای بدون سرنشین را هدایت می کند زمان. در واقع ، این حالت بسیاری از ویژگی های پیشرفته را غیرفعال می کند و همچنین به طور خودکار ارتفاع (تا 30 متر) ، فاصله (تا 30 متر) و سرعت هواپیمای بدون سرنشین خود را محدود می کند ، بنابراین اگر در یک منطقه باز بزرگ پرواز می کنید ، هیچ نگرانی در مورد پرواز در حالت وجود ندارد. این حالت برای آموزش نیز عالی است ، زیرا به شما امکان می دهد از پرواز ساده و راحت به تنظیمات پیچیده تر هموار بروید.
حداکثر ارتفاع پرواز
حداکثر ارتفاع پرواز - این تنظیم حداکثر ارتفاع سقف را تعیین می کند که پهپاد می تواند از آن بالا برود. محدوده احتمالی در متر در براکت نشان داده شده است (به عنوان مثال 20-500 متر). در بسیاری از کشورها این ارتفاع طبق قانون محدود به 120 متر است. شایان ذکر است که قبل از برخاستن از این نکات ، از قبل با قوانین محلی آشنا شوید.
حداکثر فاصله
حداکثر فاصله - این تنظیم حداکثر را تنظیم می کند. فاصله پهپاد از کنترل از راه دور محدوده احتمالی در متر در براکت نشان داده شده است (به عنوان مثال 15-500 متر). در بسیاری از کشورها ، این پارامتر نیز ممکن است توسط قانون محدود شود. به عنوان مثال ، در ایالات متحده ، کاربران پهپاد ملزم به پرواز با پهپاد در محدوده دید هستند ، به عبارت دیگر ، هنگام خلبانی ، اپراتور (خلبان) باید بتواند پهپاد خود را ببیند.

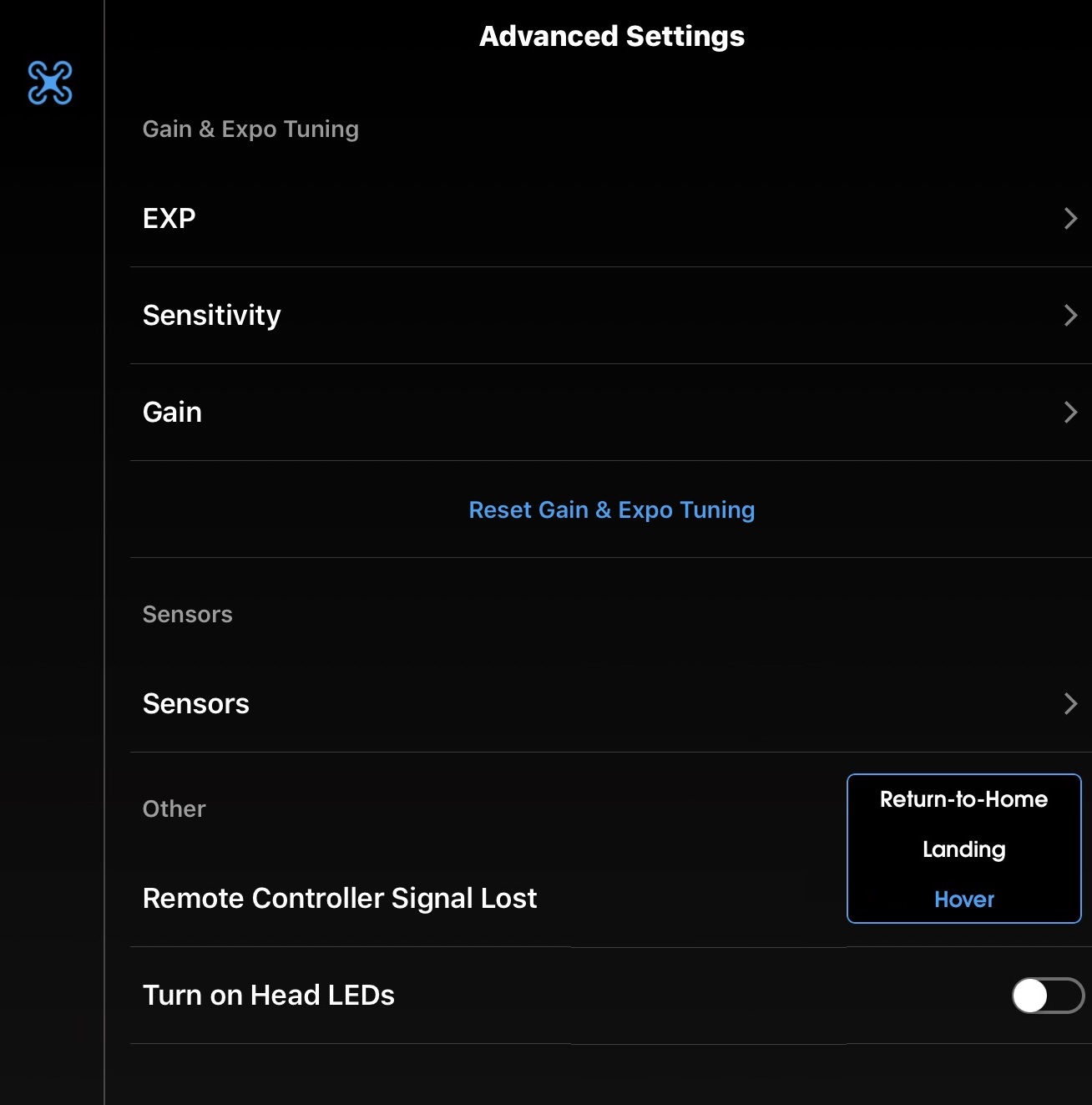
تنظیمات پیشرفته
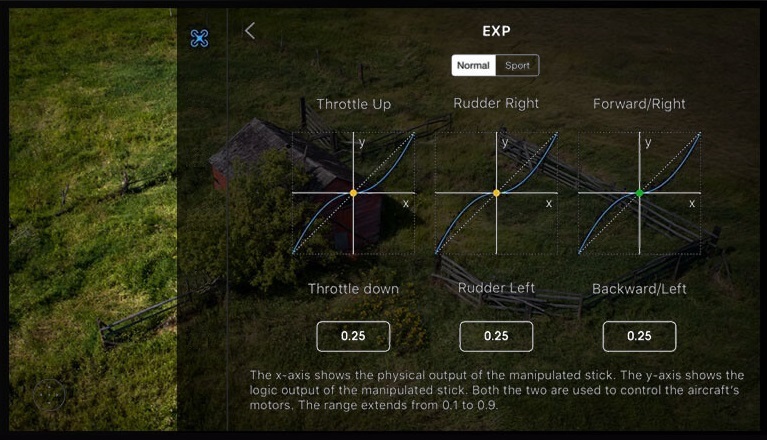
تنظیمات پیشرفته - گزینه های موجود در این منو برای کاربران پیشرفته است. به عنوان مثال ، در اینجا می توانید پاسخ پهپاد را نسبت به حرکت چوب های کنترل / جوی استیک ها تنظیم کنید (می تواند تیزتر یا نرم تر باشد). می توان آن را با تنظیم یک گیتار مقایسه کرد ، جایی که هر گیتاریست ترجیح متفاوتی دارد. علاوه بر این ، برای هر تنظیم به طور جداگانه.
افزایش
با وارد کردن کوچکترین مقدار ، دامنه حرکت چوبها / جوی استیکها را قبل از شروع پاسخگویی هواپیمای بدون سرنشین (که مربوط به حرکت روانتر / برازندهتر هواپیمای بدون سرنشین است ، افزایش می دهد) و بیشتر برای تیراندازی مناسب خواهد بود)... وارد کردن حداکثر مقدار منجر به واکنش سریع هواپیمای بدون سرنشین به کوچکترین حرکت چوب ها می شود (که مربوط به حرکت تهاجمی تر هواپیمای بدون سرنشین است و بیشترین ارتباط را با پروازهای سریع FPV خواهد داشت).
اگر چوبها توسط کاربر تغییر نکرده باشند:
- منحنی گاز بالا یا پایین گاز بر پاسخ موتورها در حرکت دادن چوب چپ به جلو / عقب تأثیر می گذارد که مطابق است تا ظهور / سقوط هواپیمای بدون سرنشین
- منحنی راست فرمان / سمت چپ فرمان ، پاسخ موتورها را در حرکت چوب چپ به راست / چپ ، که مربوط به چرخش هواپیمای بدون سرنشین حول محور خود به راست / چپ است ، تحت تأثیر قرار می دهد.
- منحنی "(جلو / راست) / (عقب / چپ)" بر پاسخ موتورها به حرکت چوب راست (جلو / راست) / (عقب / چپ) ، که مربوط به حرکت پهپاد به جلو / راست و عقب / چپ).
افزایش
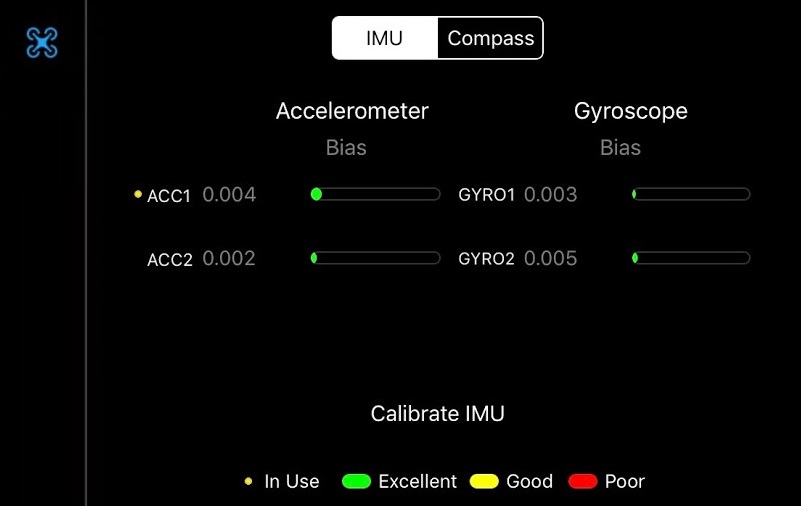
اطلاعات
- اگر در حین کار با هواپیمای بدون سرنشین مشکلاتی در قالب پرواز نادرست ، رانش یا خطاها ظاهر شود در قطب نما ، با کالیبراسیون IMU با ضربه زدن روی نماد زیر "Calibrate IMU" آنها را برطرف کنید. وضعیت فعلی IMU توسط پالت رنگی که در زیر قرار دارد نشان داده شده است ، جایی که: سبز - عالی ؛ رنگ زرد خوب است ؛ قرمز بد است.
سنسورها: قطب نما
این بخش مشکلات قطعی یا نویز قطب نما را بررسی می کند. در صورت لزوم ، می توانید با ضربه زدن روی نماد زیر "Calibrate Compass" ، آن را کالیبره کنید. وضعیت فعلی قطب نما با پالت رنگی که در زیر قرار دارد نشان داده شده است ، جایی که: سبز - عالی ؛ رنگ زرد خوب است ؛ قرمز بد است.
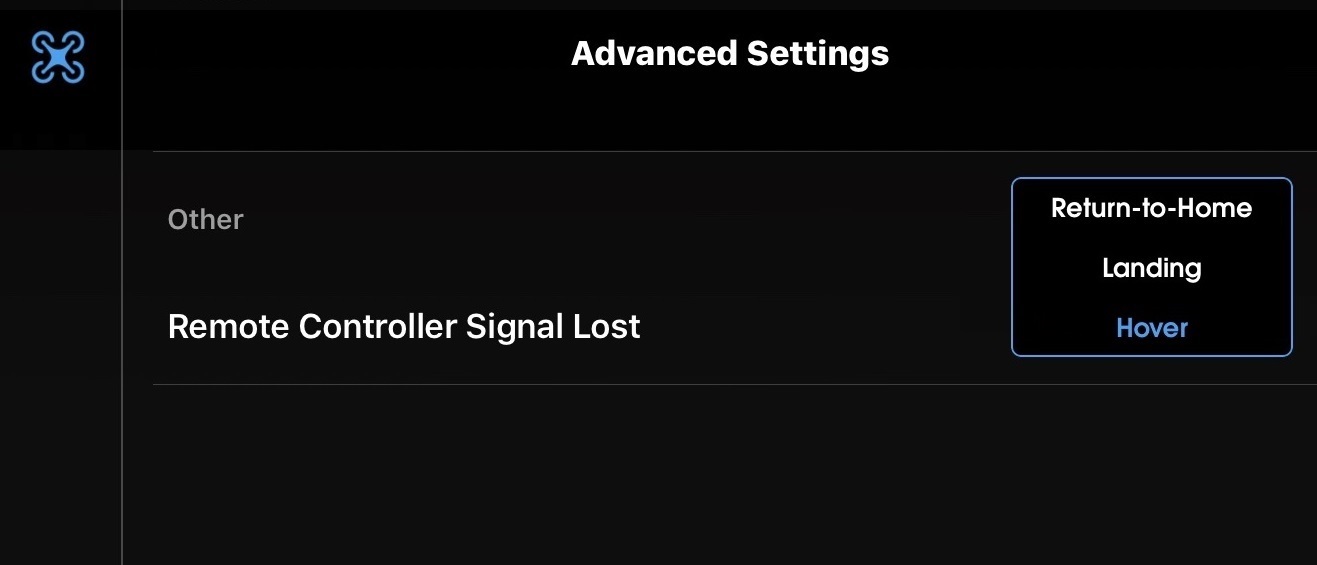
سیگنال کنترل از راه دور از دست رفته
این بخش عملکرد به اصطلاح "Failsafe" را پیکربندی می کند ، که به لطف آن هواپیمای بدون سرنشین همیشه می داند وقتی ارتباط بین او و کنترل پنل از بین می رود این کار را انجام دهد.
در صورت قطع اتصال سه سناریو وجود دارد:
- بازگشت به خانه: در این مورد ، هواپیمای بدون سرنشین بازگشت به نقطه برخاست (به طور پیش فرض تنظیم شده است).
- فرود: در این حالت ، هواپیمای بدون سرنشین در نقطه قطع شدن فرود می آید.
- شناور: در این حالت ، هواپیمای بدون سرنشین در نقطه ای که ارتباط از بین می رود ، حرکت می کند.
نکات
- به یاد داشته باشید که از دست دادن سیگنال می تواند به دلایل مختلف رخ دهد ، مانند زمانی که هواپیمای بدون سرنشین بیش از حد پرواز می کند ، کنترل از راه دور روشن نمی شود یا هنگامی که سیگنال مسدود شده...
- توصیه می شود تنظیمات پیش فرض انتخاب شده توسط توسعه دهنده را ترک کنید: بازگشت به خانه. و قبل از برخاستن ، اقدامات موجود در بخش: تنظیمات نقطه اصلی را با ضربه زدن روی نماد پیکان ، و در نتیجه تأیید مکان فعلی برخاست ، تکرار کنید.
- هنگام پرواز هواپیما در داخل ساختمان ، شناور توصیه می شود.
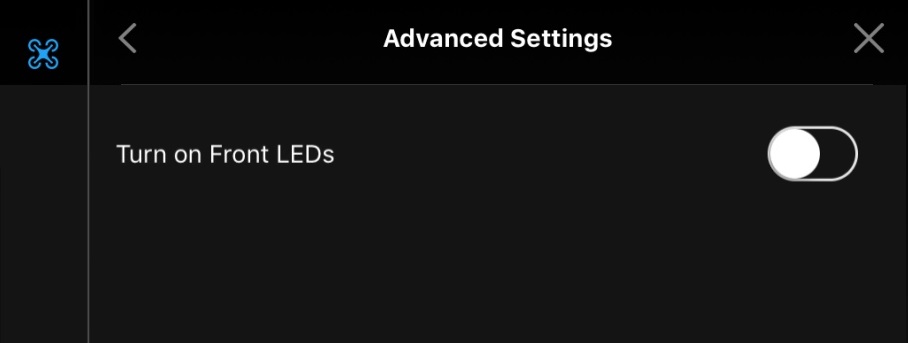
LED های جلو را روشن کنید
این گزینه LED های جلویی را روشن می کند (قرمز کامل). این می تواند هنگام پرواز در نور کم مفید باشد زیرا چراغ قرمز به راحتی می تواند وارد میدان دید دوربین شود.
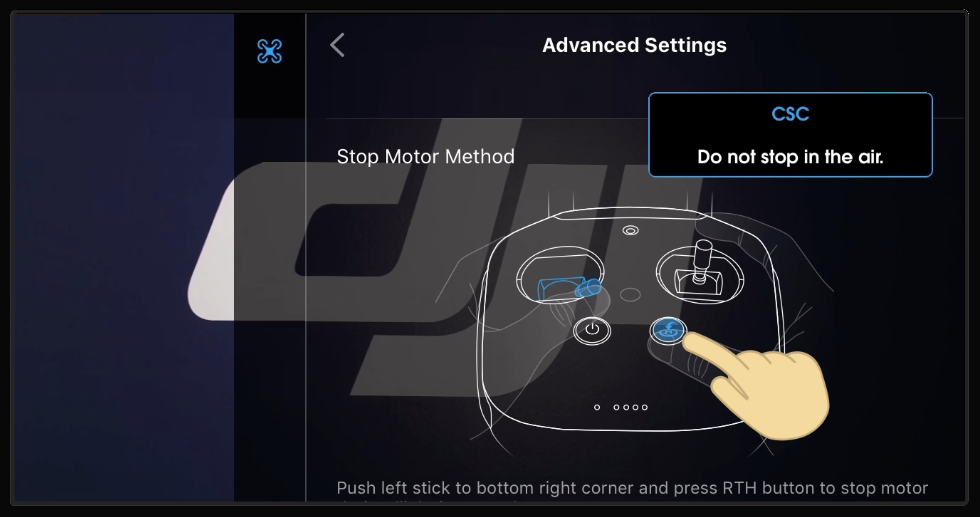
روش توقف موتور
در اینجا کاربر می تواند توقف اضطراری موتورها را فعال کرده یا آن را به طور کلی حذف کند (برای هر مدل ، این روشها متفاوت است)
برای این کار دو تنظیم وجود دارد:
- CSC: با حرکت همزمان چوب کنترل چپ ، موتورها را متوقف می کند به زاویه سمت راست پایین و فشار دادن دکمه RTH / بازگشت به صفحه اصلی (این تنظیم پیش فرض است).
- در هوا متوقف نشوید: از خاموش شدن اضطراری موتورها در حالی که هواپیمای بدون سرنشین در هوا است جلوگیری می کند.
اطلاعات
- توقف اضطراری موتورها می تواند در موارد مختلف مربوط باشد ، به عنوان مثال ، هنگامی که یک هواپیمای بدون سرنشین ، از طریق بی دقتی / بی احتیاطی خلبان ، تاج درخت را لمس می کند ، که به ناچار منجر به سقوط کنترل نشده و به دنبال آن گیر افتادن هواپیمای بدون سرنشین در شاخه های یک درخت می شود. و برای اطمینان از ایمنی عناصر نیروگاه ، بهتر است سریع موتورها را خاموش کنید.
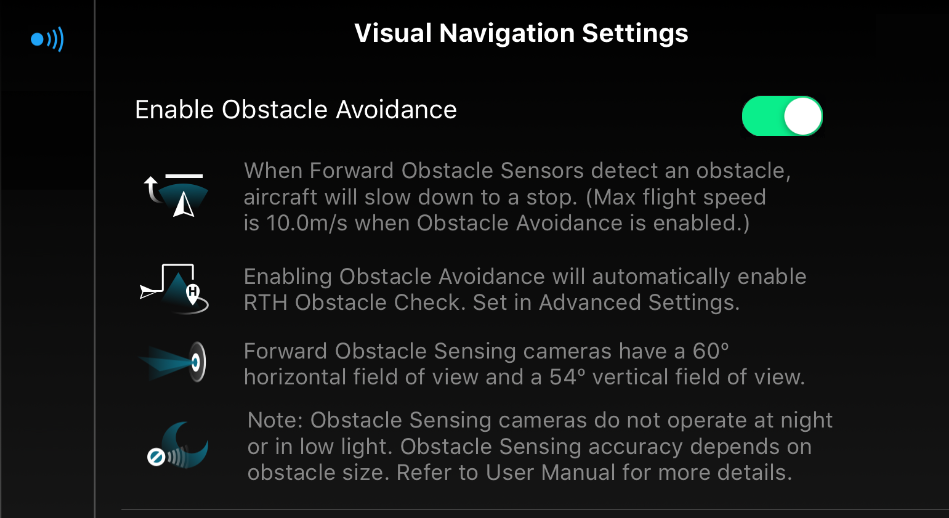
تنظیمات ناوبری بصری
تنظیمات ناوبری بصری هواپیما در اینجا تغییر کرده است. به عبارت دیگر ، در این بخش ، می توانید حسگرهای مسئول تجسم جهان اطراف را فعال و غیرفعال کنید ، از جمله برای حالت های فردی پرواز خودکار ، که مستقیماً با این حسگرها تعامل دارند. برای رفتن ، روی نماد مربوطه به شکل "نقطه منتشر شده
" در سمت چپ منوی "تنظیمات کنترل اصلی" ضربه بزنید. علاوه بر این ، برای هر تنظیم به طور جداگانه.
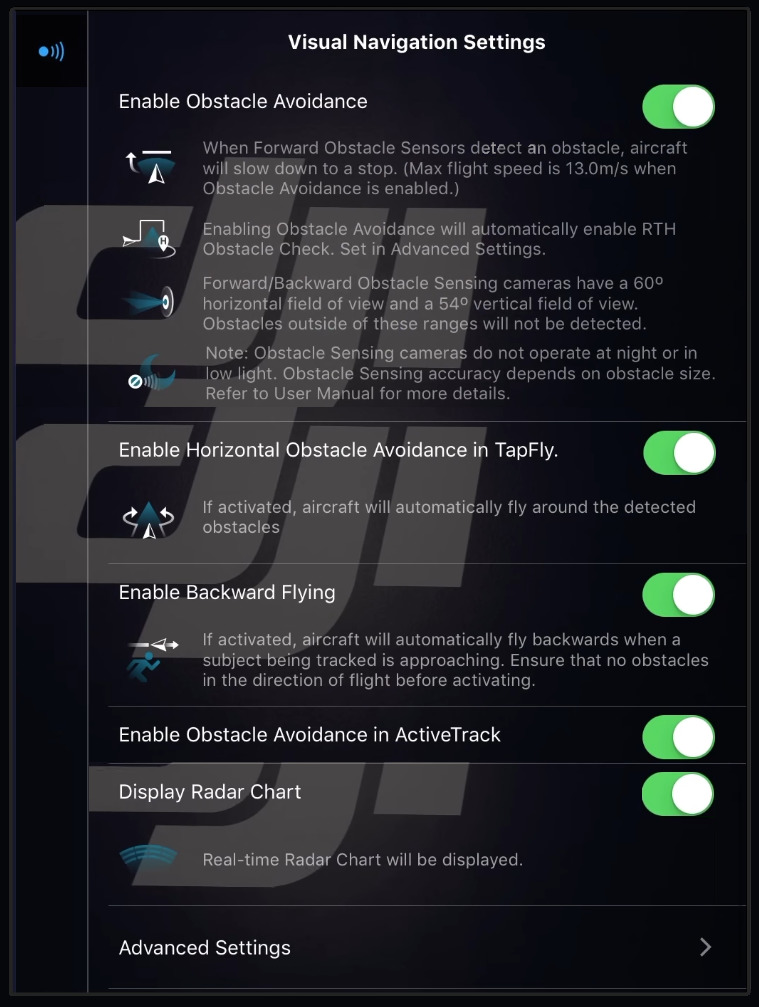
اجتناب از موانع را فعال کنید
این تنظیم سیستم اجتناب از مانع حساس به لمس را فعال یا غیرفعال می کند. به اصطلاح یک تغییر عمومی. پس از خاموش کردن ، پهپاد دیگر موانع را تشخیص نمی دهد. توصیه می شود همیشه فعال را کنار بگذارید.
اطلاعات
- هنگامی که مانعی وارد میدان دید سنسورهای جلویی می شود ، پهپاد سرعت خود را کاهش داده و متوقف می شود.
- اگر اجتناب از موانع فعال باشد ، حداکثر سرعت پرواز از 46 کیلومتر در ساعت تجاوز نمی کند.
- با فعال کردن سیستم اجتناب از موانع ، هنگام اجرای مانع RTH ، اجتناب از موانع به طور خودکار فعال می شود. قابل تنظیم در تنظیمات پیشرفته ( به پایین
- سنسورهای مانع جلو و عقب دارای میدان دید افقی 60 درجه و میدان دید عمودی 54 درجه هستند. موانع خارج از این محدوده ها توسط سیستم شناسایی نمی شوند.
- سنسورهای تشخیص موانع نمی توانند در شب یا در نور کم کار کنند.
- دقت تشخیص موانع بستگی به اندازه این موانع دارد. لطفاً برای جزئیات بیشتر به دفترچه راهنمای کاربر مراجعه کنید.
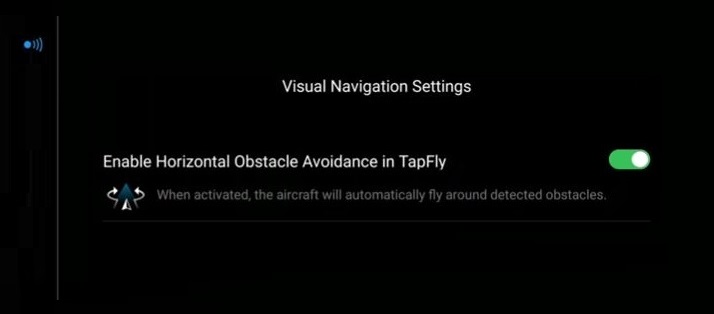
اجتناب از موانع افقی را در TapFly فعال کنید
این تنظیم اجتناب از موانع افقی را در حالت پرواز خودکار TapFly فعال یا غیرفعال می کند. هنگامی که پهپاد فعال می شود ، به طور خودکار در اطراف موانع در سمت چپ یا راست آنها پرواز می کند.
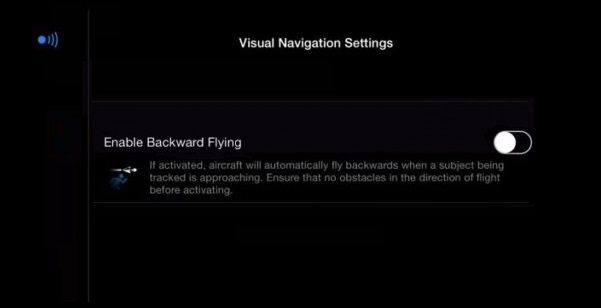
فعال کردن پرواز به عقب
حرکت جسم به سمت هواپیمای بدون سرنشین) ، پهپاد دور نمی زند ، اما به طور خودکار به عقب حرکت می کند و شی را ردیابی می کند. قبل از فعال شدن ، مطمئن شوید که هیچ مانعی در جهت پرواز وجود ندارد.
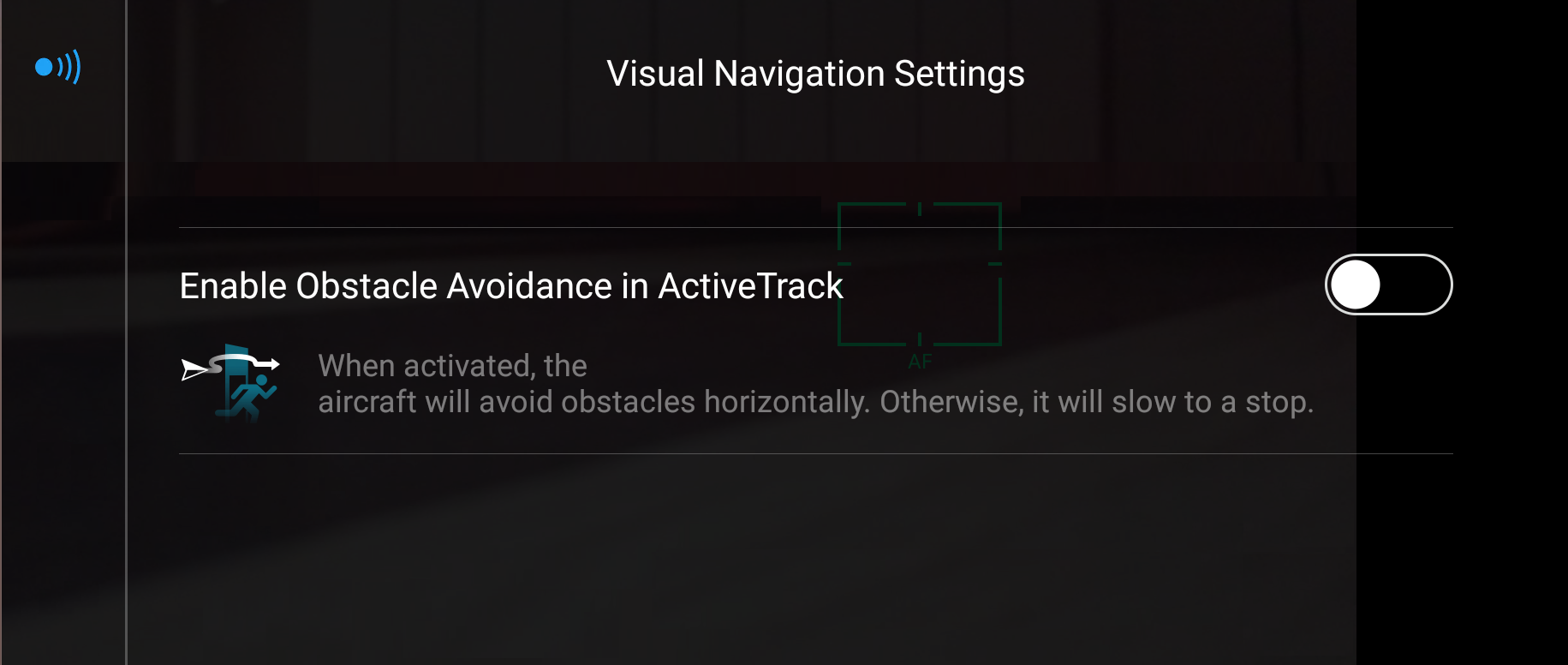
فعال کردن اجتناب از موانع در ActiveTrack
این تنظیم اجتناب از موانع افقی را در ActiveTrack خودکار فعال یا غیرفعال می کند حالت پرواز در صورت غیرفعال شدن ، پهپاد سرعت خود را کاهش می دهد و در مقابل موانع متوقف می شود ، هنگامی که موانع را در حین فرایند خودکار تشخیص می دهد و منتظر دستورات بعدی خلبان است.
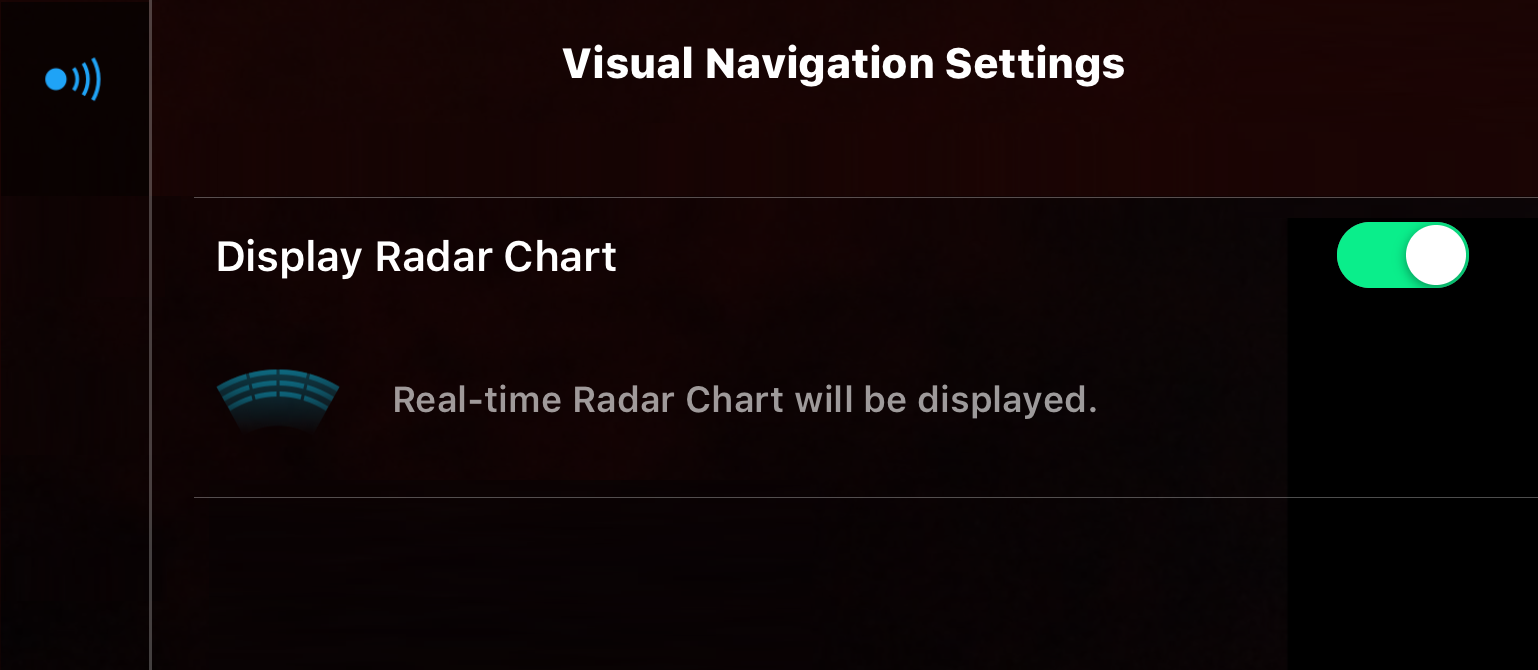
نمودار رادار نمایش
این تنظیم نمایش شاخص های مجاورت موانع را در اصلی فعال یا غیرفعال می کند صفحه پرواز
تنظیمات پیشرفته
تنظیمات پیشرفته برای سیستم موقعیت یابی بصری. علاوه بر این ، برای هر تنظیم به طور جداگانه.
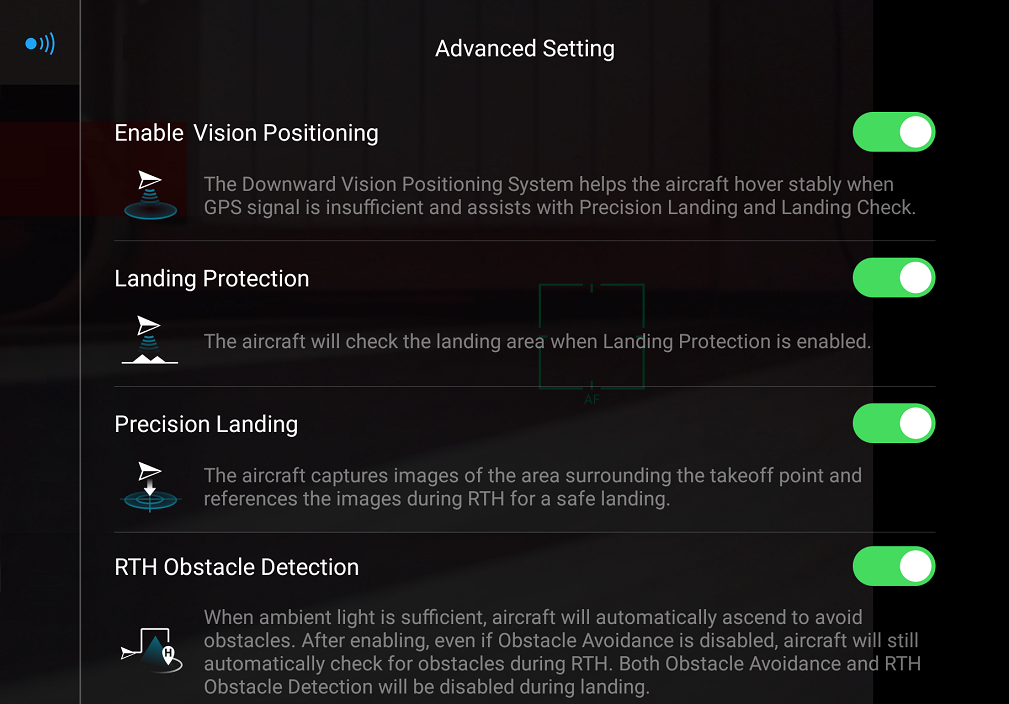
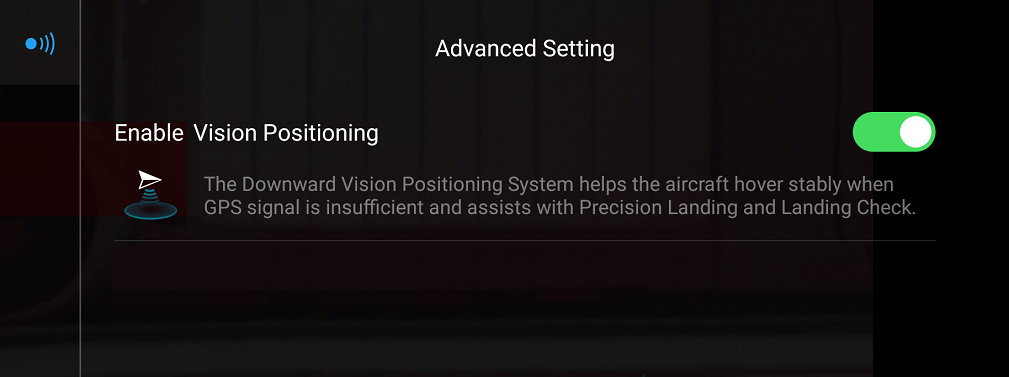
فعال کردن موقعیت یابی
فعال کردن موقعیت یابی دید - تنظیم سنسورهای موقعیت پایین را فعال یا غیرفعال می کند (در قسمتهای پایینی هواپیمای بدون سرنشین قرار دارد) ، که وظیفه حصول اطمینان از شناور ماندن دقیق و پایدار را در مواقعی که موقعیت ماهواره ای در دسترس نیست ، و همچنین عملکرد سیستم حفاظت از فرود و سایر سیستمها را بر عهده دارند. هنگامی که غیرفعال است ، سیستم از کاربر "غیرفعال کردن موقعیت دید؟" و پیشنهاد تأیید "OK" یا لغو "لغو" را ارائه می دهد.
حفاظت از فرود
حفاظت از فرود - هنگام فعال بودن ، هواپیما قبل از فرود سطح را از نظر موانع بررسی می کند ، و در صورت وجود در هر صورت ، هشدار در مورد موانع احتمالی در صفحه اصلی نمایش داده می شود ، پس از آن خلبان باید فرود را تأیید یا لغو کند. هنگامی که غیرفعال است ، سیستم از کاربر می پرسد: "حفاظت از فرود را غیرفعال کنید؟" و پیشنهاد تأیید "OK" یا لغو "لغو" را ارائه می دهد.
فرود دقیق
فرود دقیق - در صورت فعال شدن ، هواپیمای بدون سرنشین هنگام انجام بازگشت خودکار (RTH) به عنوان زمین تلاش می کند. تا آنجا که ممکن است به محل برخاستن نزدیک شوید.
بررسی موانع RTH (تشخیص)
بررسی موانع RTH - هنگام فعال بودن تنظیمات ، هنگام انجام بازگشت خودکار ، هواپیما هنگامی که موانع شناسایی می شوند ، به طور خودکار ارتفاع می گیرند ، حتی اگر تنظیمات اجتناب از موانع غیرفعال باشد. هنگامی که غیرفعال است ، سیستم از کاربر می پرسد: "بررسی مانع RTH را غیرفعال کنید؟" و پیشنهاد تأیید "OK" یا لغو "لغو" را ارائه می دهد.
اجتناب از موانع از راه دور RTH
اجتناب از موانع از راه دور RTH - هنگامی که تنظیمات فعال است ، هواپیمای بدون سرنشین مسیر برگشت خود را به طور خودکار تنظیم می کند برای جلوگیری از موانع در طول مسیر ، در حالی که gimbal به هیچ فرمان از کنترل پنل پاسخ نمی دهد.
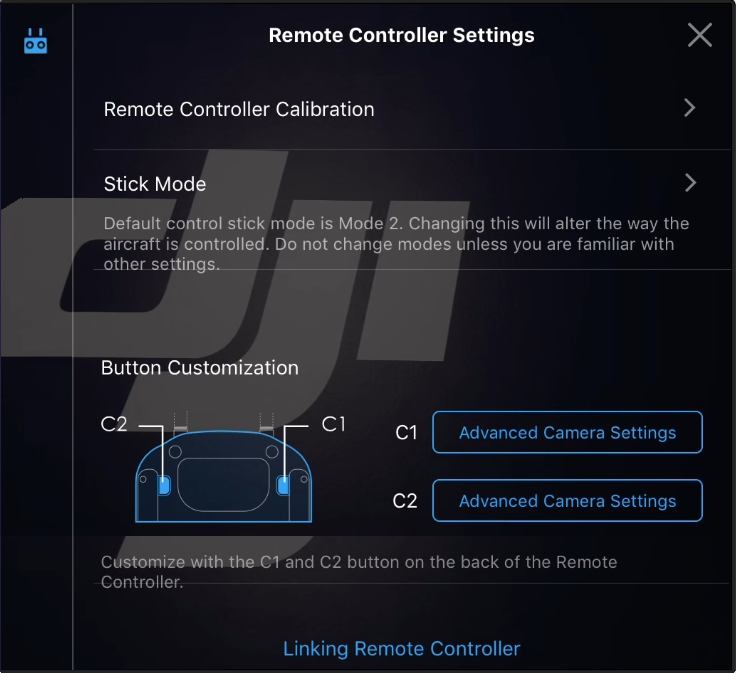
تنظیمات کنترل از راه دور
در اینجا کاربر تغییراتی در تنظیمات کنترلر ایجاد می کند. برای رفتن ، روی نماد مربوطه به شکل "کنترل از راه دور
" در سمت چپ منوی "تنظیمات کنترل اصلی" ضربه بزنید. جزئیات بیشتر در مورد هر تنظیم.
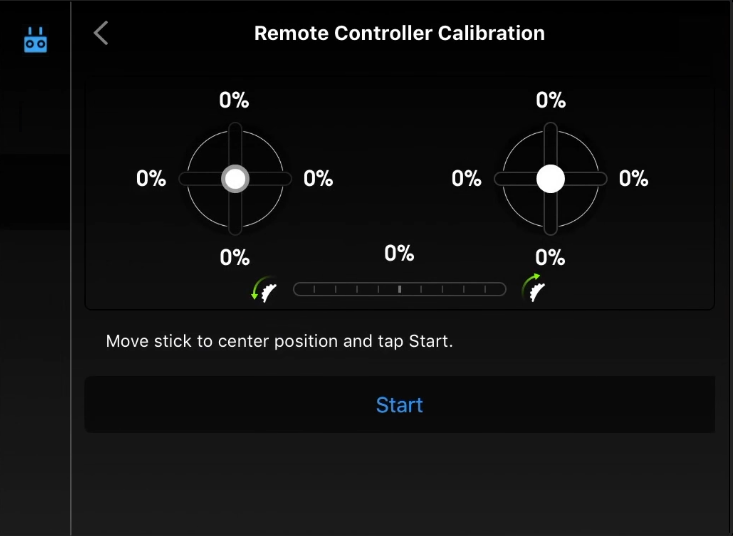
کالیبراسیون کنترل از راه دور
اگر کنترل ها (چوب / جوی استیک ؛ چرخ های تابه / کج) کار کنند به طور نادرست / نه دقیقا ، سپس در این منو می توانید آنها را کالیبره کنید. این روش با خاموش کردن هواپیمای بدون سرنشین انجام می شود. برای شروع روش کالیبراسیون ، روی نماد "Calibrate" ضربه بزنید ، سپس چوب ها / جوی استیک ها را در موقعیت مرکزی قرار دهید. سپس روی نماد "شروع" ضربه بزنید و چوبها و چرخها را از صفر به حالت افراطی (100٪) منتقل کنید تا نماد "پایان" فعال شود. روی نماد "پایان" ضربه بزنید. کالیبراسیون کامل شد
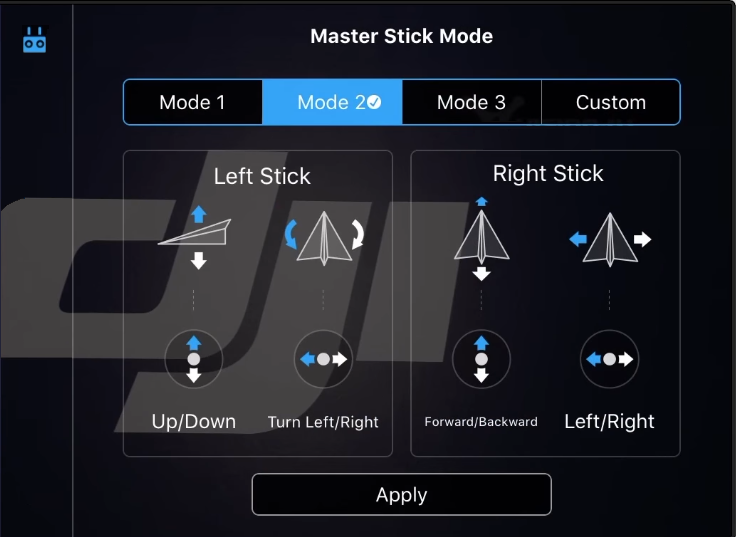
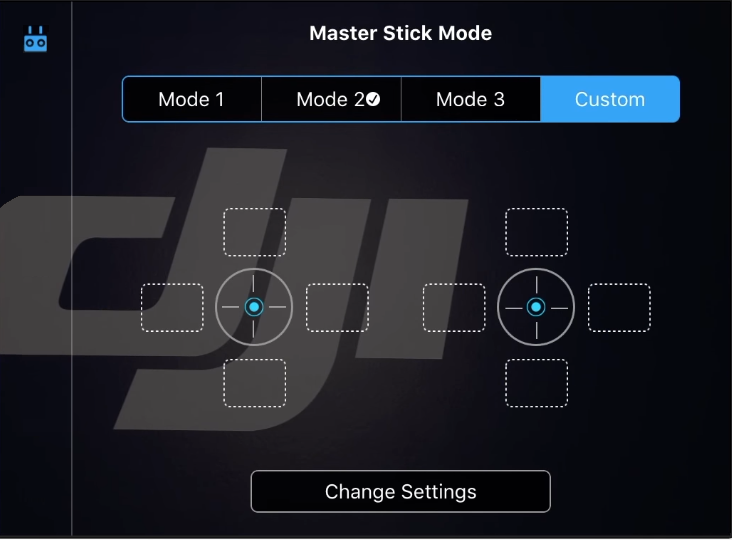
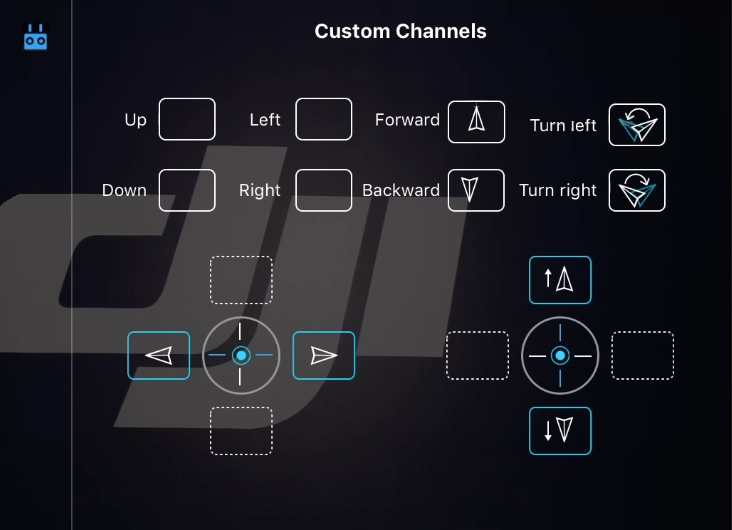
Stick Mode
] کنترل هواپیمای بدون سرنشین: حالت 1 / حالت 2 (پیش فرض) / حالت 3.
همچنین یک تنظیم دستی برای عملکرد چوبها وجود دارد - "سفارشی" ، که به کاربر اجازه می دهد اقدامات پهپاد را برای هر حرکت چوب ها برای پیکربندی دستی عملکرد چوبها ، روی بخش "سفارشی" و سپس روی نماد "تغییر تنظیمات" ضربه بزنید. هر نماد را برای نشان دادن جهت هواپیما بکشید: بالا / پایین / چپ / راست / جلو / عقب / عقب / چپ / گردش به راست) در محور هر چوب. پس از اتمام محل ، نصب را با ضربه زدن روی نماد "ذخیره" تأیید کنید.
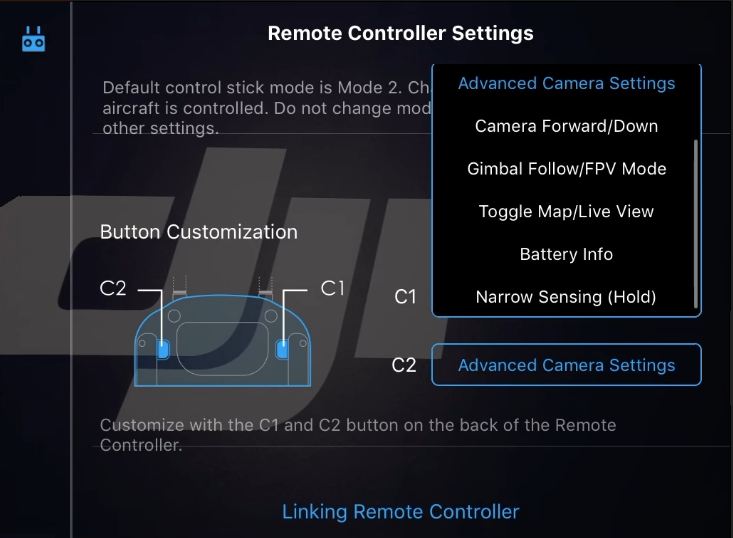
سفارشی سازی دکمه
همانطور که ممکن است متوجه شده باشید ، دو دکمه C1 / C2 در پشت کنترل از راه دور وجود دارد. این دکمه ها قابل تنظیم هستند ، به عبارت دیگر ، کاربر خودش تصمیم می گیرد که هرکدام از آنها چه مسئولیتی را بر عهده خواهند داشت. بر این اساس ، این منو به شما امکان می دهد یکی از دستورات موجود را به این دکمه ها اختصاص دهید. برای انجام این کار ، هر فرمان را از منوی کشویی روبروی C1 / C2 انتخاب کنید. به طور پیش فرض ، هر دو دکمه تنظیمات پیشرفته دوربین را باز می کنند ، اما می توانید ، به عنوان مثال ، طوری تنظیم کنید که وقتی C1 / C2 را فشار می دهید ، تمام اطلاعات مربوط به باتری (اطلاعات باتری) روی صفحه نمایش داده می شود ، یا می توانید پهپاد را مجبور کنید دوربین برای تغییر سریع از موقعیت های افقی به جلو به پایین و عقب عمودی (Camera Forward / Down) ، تغییر حالت عملکرد گیمبال (Gimbal Follow / حالت FPV) ، نمایش نقشه و سپس بازگشت به حالت اول شخص (تغییر حالت نقشه /) نمای زنده). هر کدام را آزمایش کنید و آنچه را که نیاز دارید انتخاب کنید.
کنترل از راه دور
اگر به هر دلیلی کنترل از راه دور نتواند با هواپیما یا کاربر یک ریموت جدید خریداری کرده است و باید آن را با هواپیمای بدون سرنشین جفت کند ، این منو به شما امکان می دهد آنها را به راحتی با هم جفت کنید.برای اتصال / اتصال کنترل از راه دور و هواپیمای بدون سرنشین ، باید هواپیمای بدون سرنشین و کنترل از راه دور را روشن کنید ، روی نماد "Linking Remote Controller" ضربه بزنید و به مدت دو ثانیه دکمه مخصوص "bind" واقع در هیئت مدیره هواپیمای بدون سرنشین را فشار دهید (محل دکمه را می توانید در دفترچه راهنمای بخش "نمای کلی دستگاه هلی کوپتر" بیابید).
تنظیمات انتقال تصویر
برای رفتن ، روی نماد مربوطه "
" در سمت چپ "تنظیمات کنترلر اصلی" ضربه بزنید " منو. این منو کیفیت و محدوده انتقال ویدئو را تعیین می کند. برای اطمینان از انتقال FPV قابل اعتماد ، تنظیمات پیش فرض روی "Auto" تنظیم شده است (سیستم خود مانیتور می کند و برای انتقال به کانال های رایگان تغییر می کند).
انتخاب دستی کانال رایگان "سفارشی" نیز در منو موجود است. برای انتخاب دستی یک کانال ، روی نماد "سفارشی" ضربه بزنید و رایگان ترین مورد را در قسمت "انتخاب کانال" انتخاب کنید (جایی که بر اساس پالت رنگ: Chanel فعلی - کانال فعلی ؛ کانال پایدار - ناپایدار - کانال ناپایدار) تنظیمات کیفیت انتقال ، تعیین می کند که تصویر FPV چقدر واضح و واضح باشد. با این حال ، به خاطر داشته باشید که هرچه کیفیت تصویر FPV بالاتر باشد ، مسافت سیگنال کوتاهتر خواهد بود.
باتری هواپیما
این بخش مربوط به اطلاعات و تنظیمات باتری نصب شده در هواپیمای بدون سرنشین است. در اینجا کاربر می تواند از وضعیت فعلی باتری مطلع شود: ولتاژ ، ظرفیت (کامل / باقیمانده) ، دما ، می توانید زمان پرواز با شارژ فعلی این باتری و چند بار شارژ شدن آن را مشاهده کنید. برای رفتن ، روی نماد مربوطه "
" در سمت چپ منوی "تنظیمات کنترل اصلی" ضربه بزنید. جزئیات بیشتر در مورد هر تنظیم.
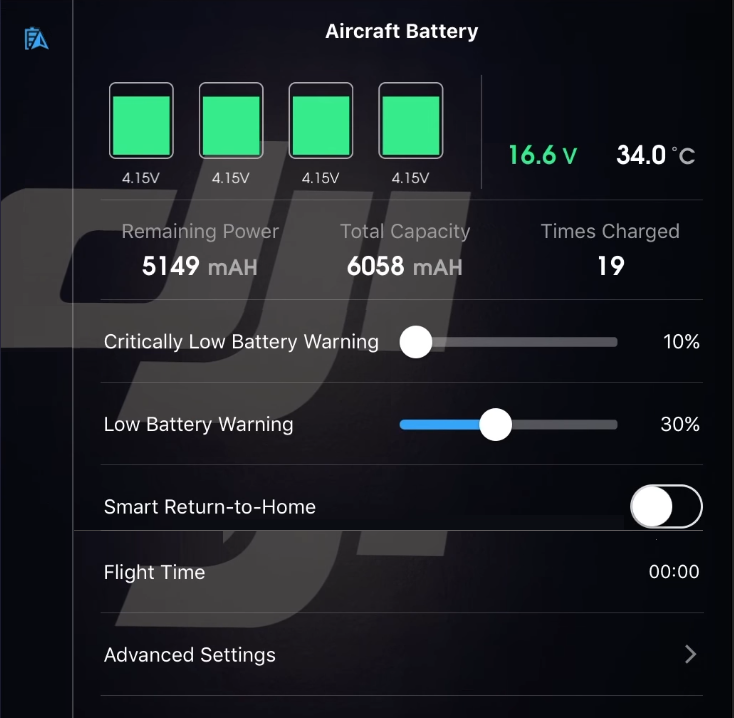
هشدار باتری نسبتاً کم با رسیدن به آن عملکرد بازگشت به خانه به طور خودکار فعال می شود.
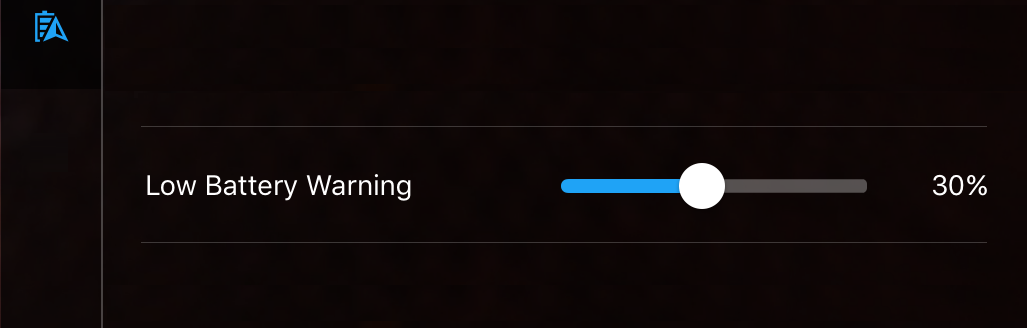
هشدار باتری کم
این تنظیم میزان شارژ باقی مانده را تنظیم می کند که سیستم به کاربر اطلاع می دهد در مورد ارزش پایین آن...
بازگشت هوشمند به خانه
همان مسیری که طی آن پرواز سرنشین دار انجام شد ، که به خودی خود مطمئن ترین بازگشت پهپاد را به محل برخاست تعیین می کند.
زمان پرواز
تایمر زمان پرواز فعلی را منعکس می کند.
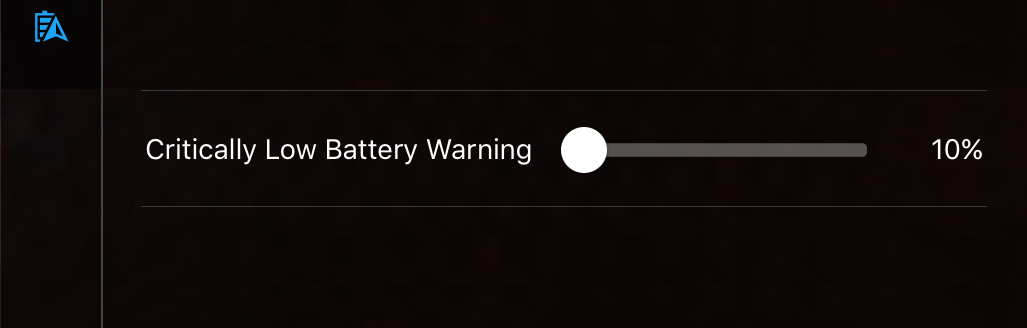
تنظیمات پیشرفته
باتری را تخلیه کرده و از وضعیت فعلی آن مطلع شوید. جزئیات بیشتر در مورد هر تنظیم.
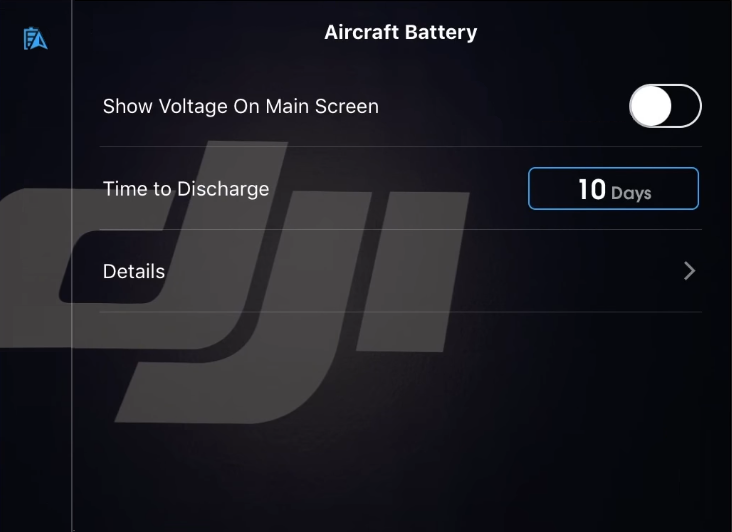
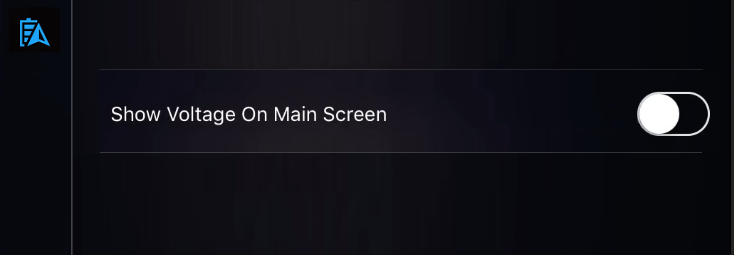
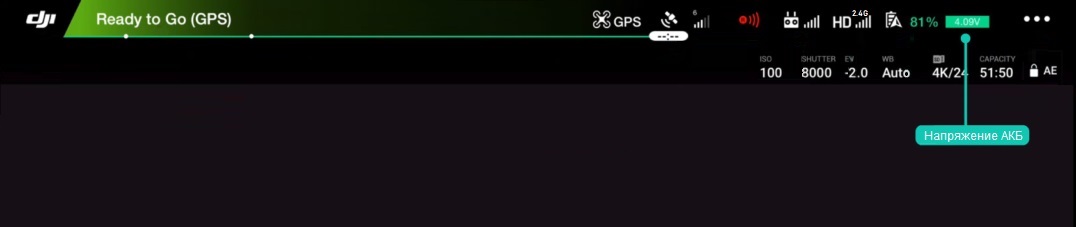
نمایش ولتاژ در صفحه اصلی
هنگامی که تنظیمات فعال است ، نشانگر ولتاژ باتری در گوشه بالا سمت راست نمایش داده می شود از صفحه اصلی پرواز
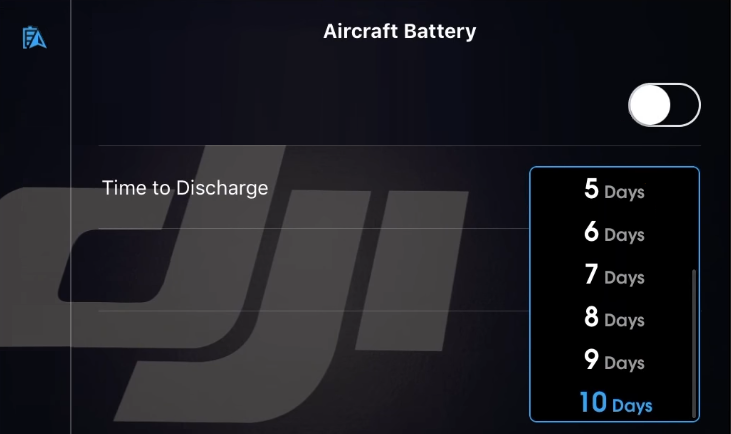
زمان تخلیه
این تنظیم ، دوره ای را تنظیم می کند که پس از آن باتری خودکار می شود -تخلیه این تنظیم عملکرد صحیح باتری LiPo را تضمین می کند و از ذخیره شدن آن در حالت شارژ جلوگیری می کند.
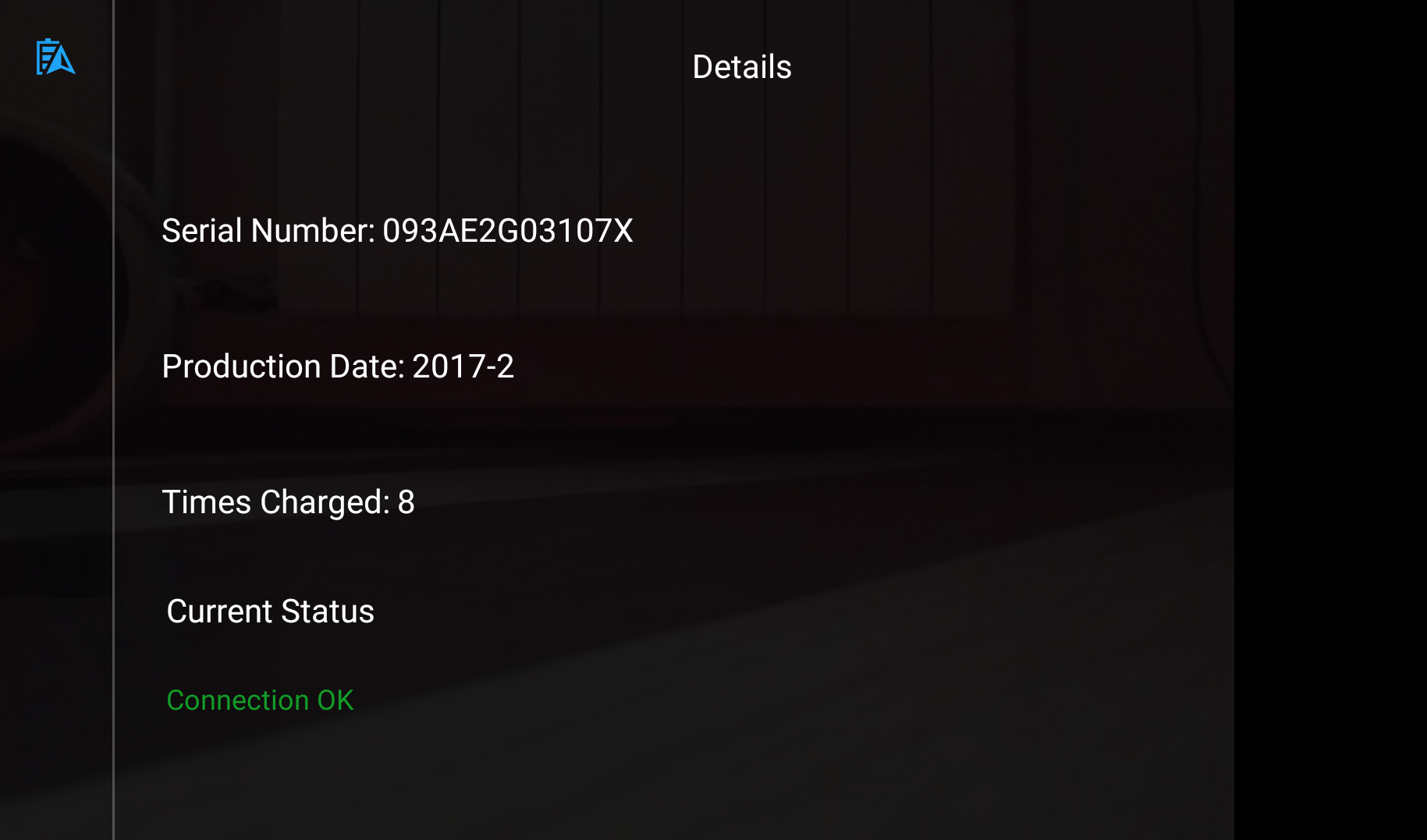
جزئیات
این قسمت شماره سریال باتری ، تاریخ تولید ، تعداد دفعات شارژ و وضعیت وضعیت فعلی
تنظیمات گیمبال
در این منو ، کاربر می تواند حالت های عملکردی گیمبال را تغییر دهد دوربین. برای رفتن ، روی نماد مربوطه به شکل "دوربین
" در سمت چپ منوی "تنظیمات کنترلر اصلی" ضربه بزنید. جزئیات بیشتر در مورد هر تنظیم.
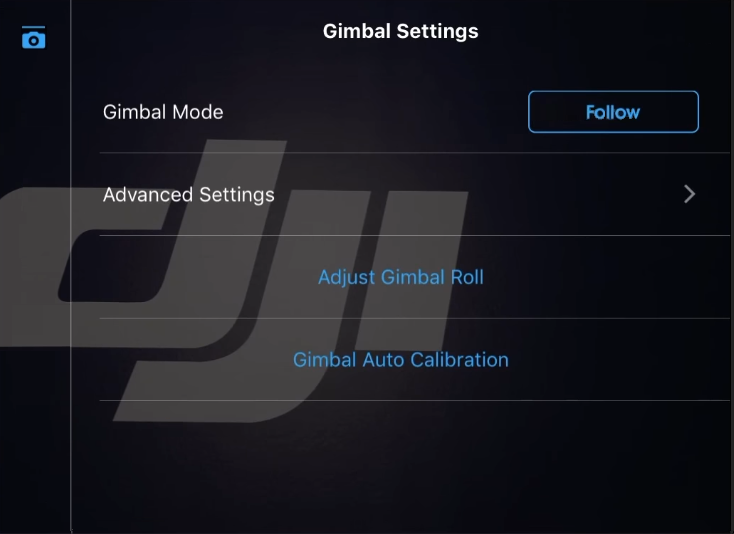
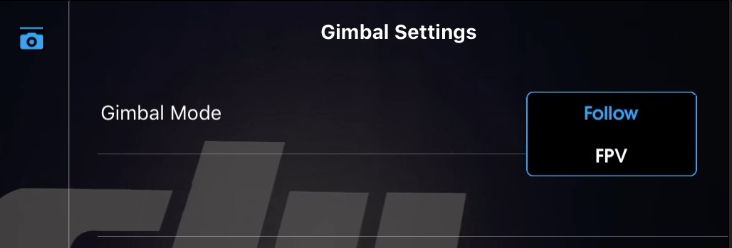
حالت گیمبال
حالت گیمبال - دو حالت گیمبال در دسترس هستند:
- را دنبال کنید = دوربین همیشه تثبیت می شود و افق را حفظ می کند (حالت عملکرد استاندارد).
- FPV (نمای اول شخص) = پرواز پرواز هواپیمای بدون سرنشین / پرنده را شبیه سازی می کند ، یعنی. در این حالت ، دوربین هواپیمای بدون سرنشین ثابت است و هنگامی که هواپیمای بدون سرنشین در حال چرخش / کج شدن است ، تصویر در نمای اول شخص نیز با رول ها نمایش داده می شود. این حالت برای پرواز با عینک DJI FPV مناسب است.
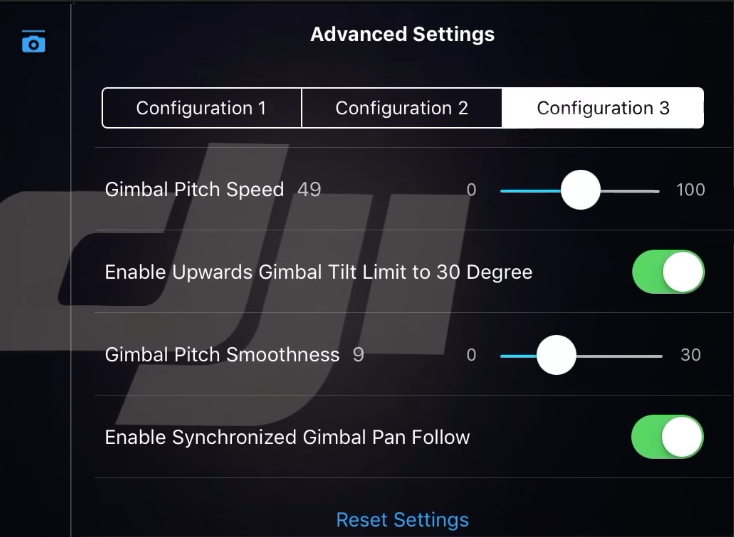
تنظیمات پیشرفته
این منو به شما امکان می دهد 3 پیکربندی مختلف را تعیین کنید عملکرد گیمبال توصیه می شود برای درک کامل نحوه عملکرد آنها با هر تنظیمات بازی کنید. به عنوان مثال ، می توانید تنظیمات مربوط به هر پیکربندی را بر اساس سریع ، عادی و آهسته تنظیم کنید:
- پیکربندی 1 = سرعت سفر پیش فرض گیمبال.
- پیکربندی 2 = گیمبال سریع کار می کند. این می تواند هنگام عکسبرداری مفید باشد ، به طوری که می توانید دوربین را بدون از دست دادن یک فریم منحصر به فرد به سرعت در معرض دید قرار دهید.
- پیکربندی 3 = گیمبال کندتر حرکت می کند. برای عکاسی از پانورامای کامل مناسب خواهد بود.
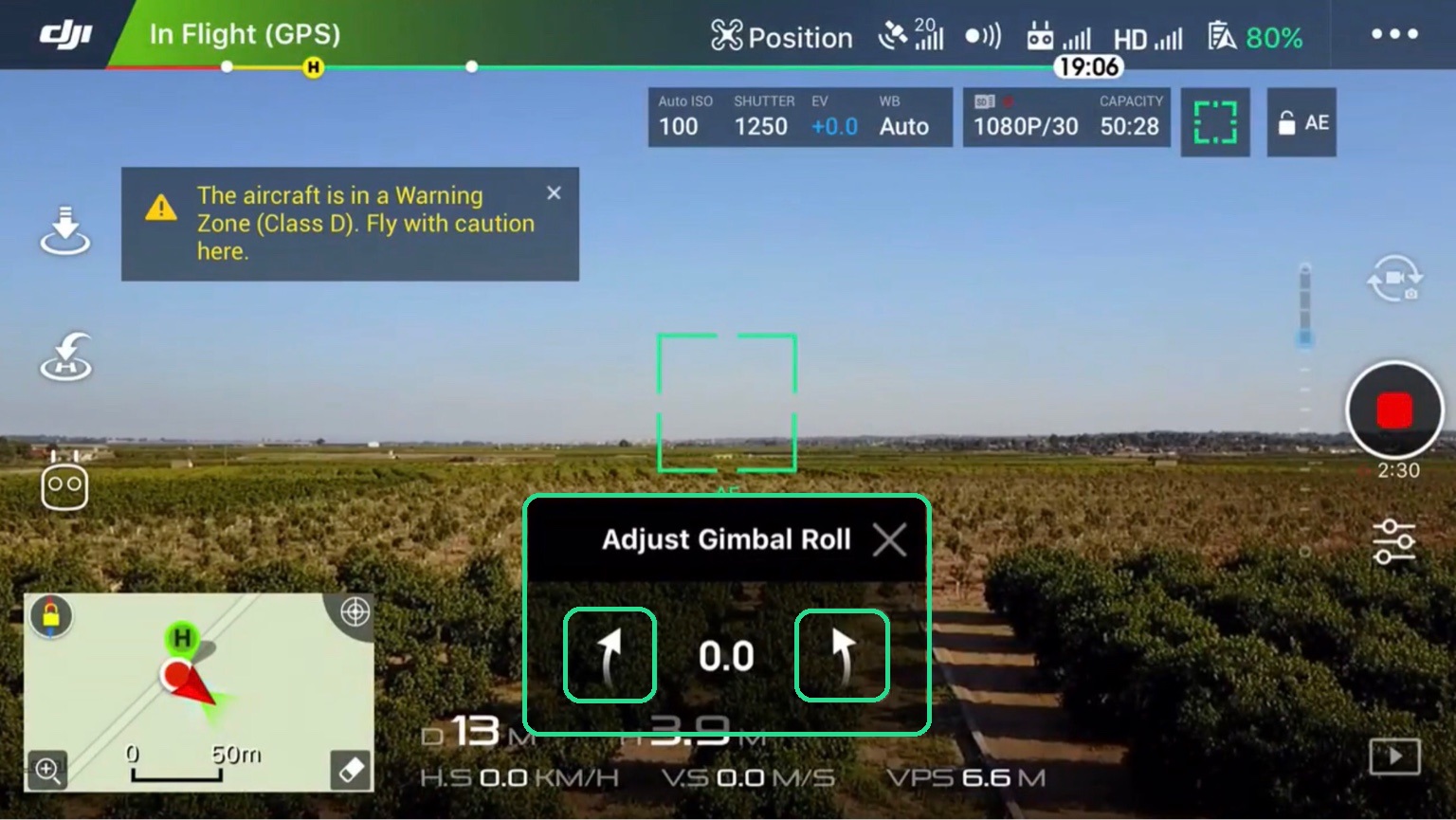
تنظیم Gimbal Roll
این تنظیم به شما این امکان را می دهد که در صورت مشاهده افق ، موقعیت افقی دوربین را به صورت دستی تصحیح کنید. ایده آل نیست
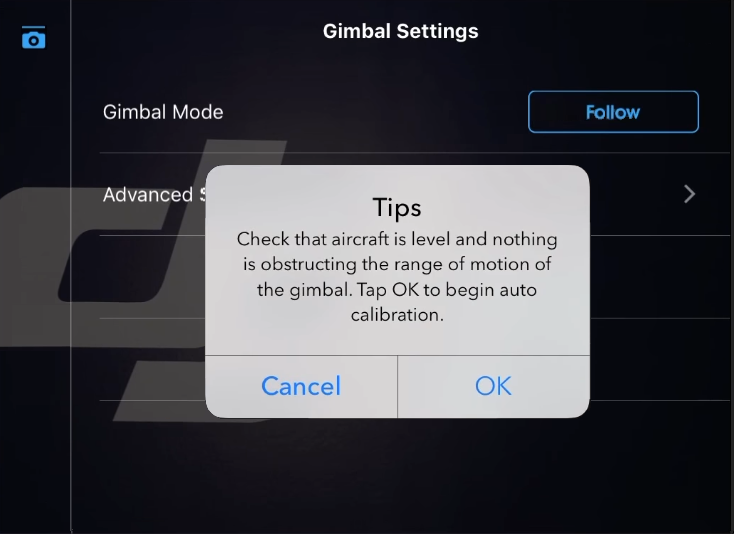
کالیبراسیون خودکار گیمبال
این تنظیم به طور خودکار موقعیت افقی دوربین را تراز می کند. قبل از شروع کالیبراسیون خودکار ، روی "Gimbal Auto Calibration" ضربه بزنید ، سیستم از کاربر می خواهد مطمئن شود که هواپیمای بدون سرنشین در حالت افقی قرار دارد و هیچ چیزی مانع حرکت گیمبال نمی شود (به عنوان مثال ، اگر قفل حمل و نقل گیمبال برداشته شود) به اگر همه چیز خوب است ، سپس روی OK ضربه بزنید تا کالیبراسیون خودکار شروع شود. برای لغو ، روی "لغو" ضربه بزنید.
تنظیمات عمومی
حداکثر نقطه تمرکز ، تنظیمات حافظه پنهان ، پخش مستقیم و همچنین اطلاعات کلیدی درباره پهپاد ، کنترل از راه دور ، برنامه تلفن همراه. برای رفتن ، روی نماد مربوطه به شکل "سه نقطه
" در سمت چپ منوی "تنظیمات اصلی کنترلر" ضربه بزنید. جزئیات بیشتر در مورد هر بخش ، زیر بخش و تنظیمات.
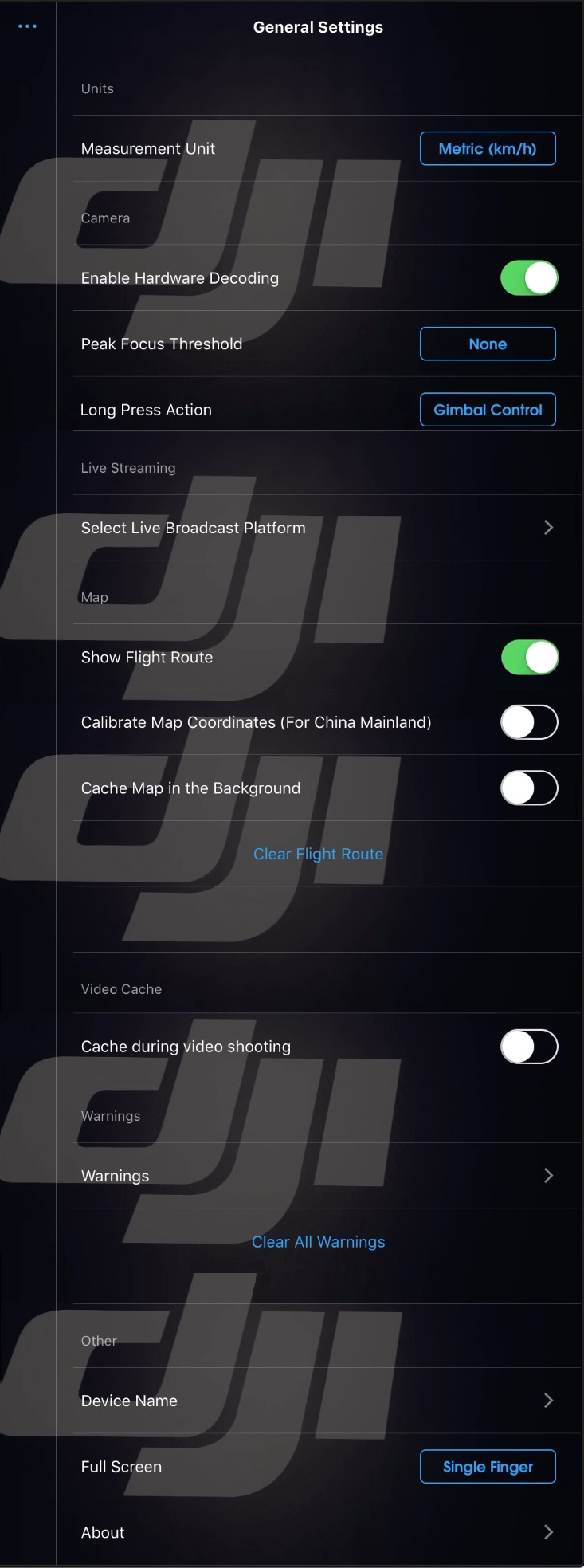
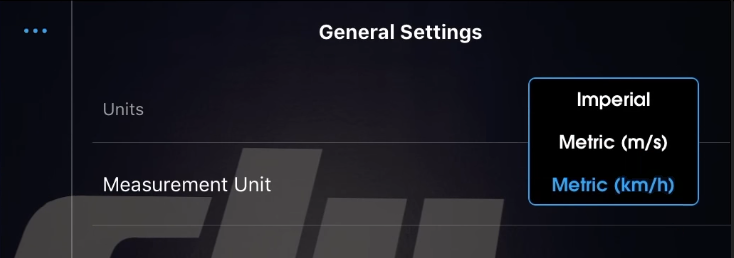
واحد
واحد اندازه گیری - به شما امکان می دهد سیستم اندازه گیری:
- شاهنشاهی
- متر متری بر ثانیه یا کیلومتر بر ساعت (متریک متر بر ثانیه یا کیلومتر در ساعت)
دوربین
فعال کردن رمزگشایی سخت افزار
فعال کردن رمزگشایی سخت افزار - رمزگشایی سخت افزار را غیرفعال یا فعال می کند.
نکته
- اگر هنگام پخش جریان مستقیم ویدئو (FPV) دچار تاخیر یا یخ زدگی شدید ، رمزگشایی سخت افزار را فعال کنید ، زیرا این می تواند کمک کننده باشد برای انتقال بهتر تصویر
- رمزگشایی سخت افزار به قدرت پردازشی مورد نیاز برای رمزگشایی ویدئوهای زنده کمک می کند. بنابراین ، اگر از تلفن هوشمند / رایانه لوحی قدیمی تر یا کندتر استفاده می کنید ، رمزگشایی سخت افزار را فعال کنید زیرا این امر می تواند به کاهش داغ شدن بیش از حد دستگاه کمک کند زیرا نیازی به کار سخت برای رمزگشایی جریان ویدئویی زنده از پهپاد نیست.
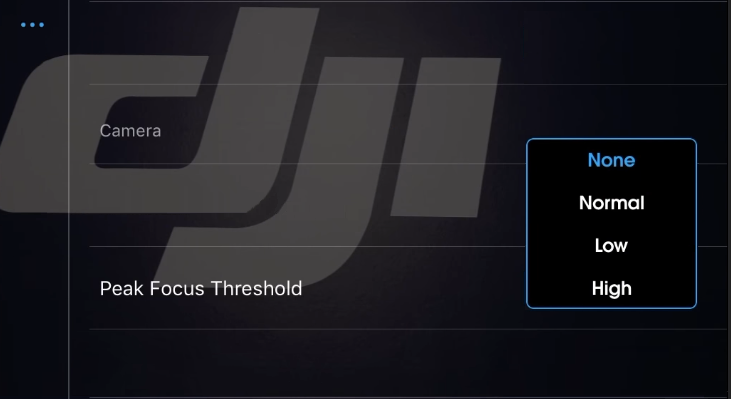
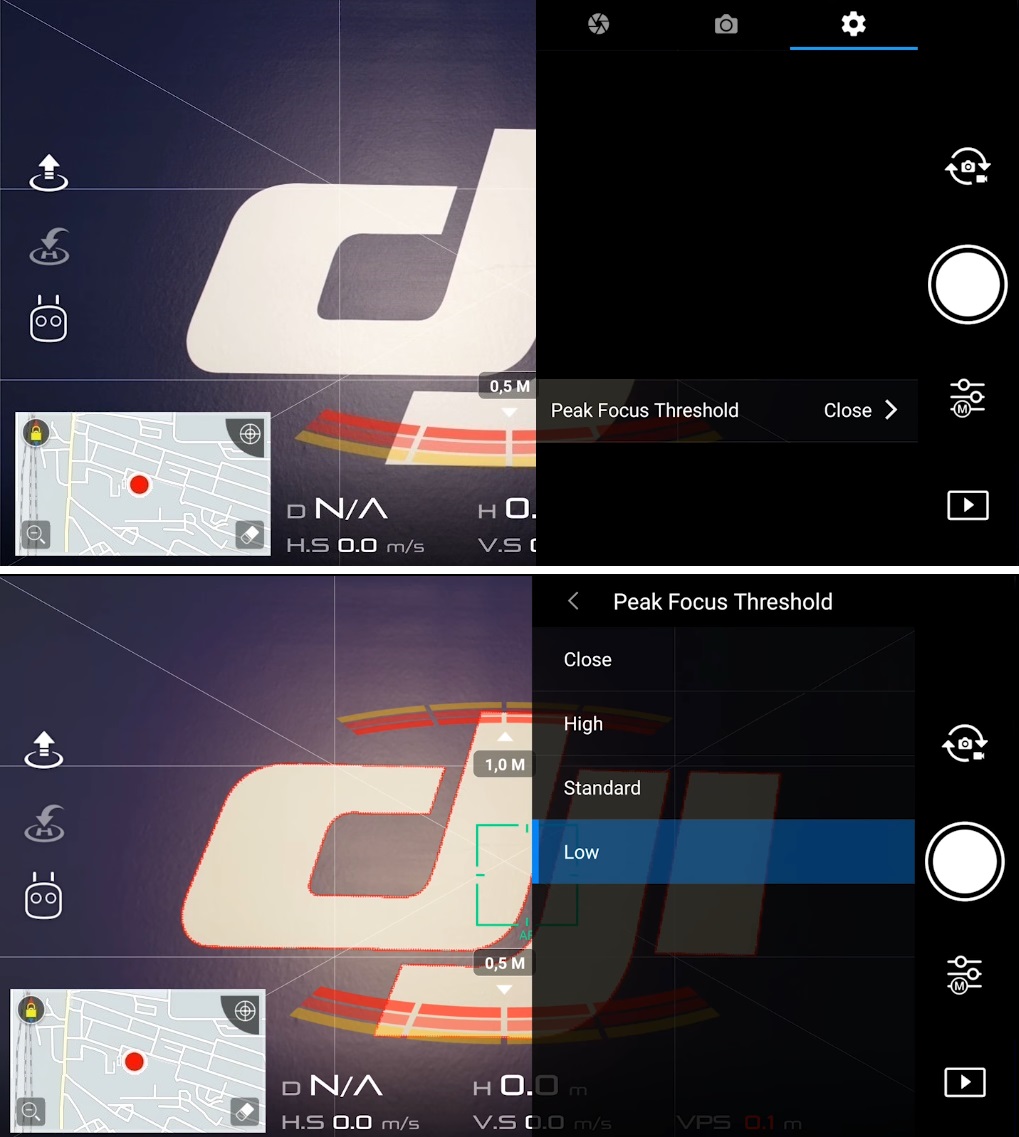
آستانه اوج تمرکز
آستانه فوکوس پیک - همه سوژه های منطقه فوکوس را با رنگ قرمز در مانیتور برجسته می کند. می توانید حالت نور پس زمینه را انتخاب کنید: عادی ، کم ، زیاد.
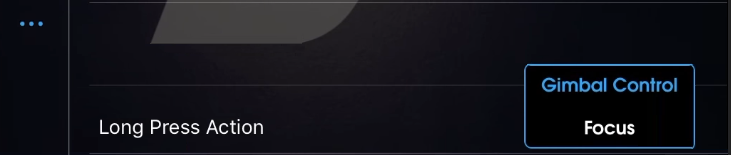
اقدام طولانی پرس
اقدام طولانی پرس - تنظیم عملکردی را که انجام می دهد تنظیم می کند در لحظه لمس طولانی صفحه اصلی پرواز انجام شود. دو عمل در دسترس است: کنترل گیمبال و تمرکز.
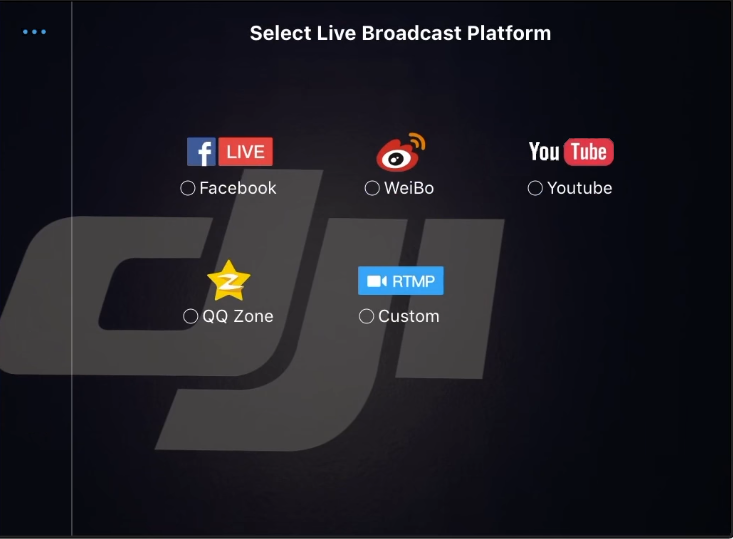
پخش مستقیم
بستر پخش زنده را انتخاب کنید - در اینجا کاربر می تواند یکی از پنج مورد موجود را انتخاب کند سیستم عامل (فیس بوک / یوتیوب / WeiBo / QQ Zone / RTMP Custom) برای نمایش ویدئوی زنده از دوربین هواپیماهای بدون سرنشین برای به اشتراک گذاشتن آنچه می بینید با همه.
نقشه
نمایش مسیر پرواز
نمایش مسیر پرواز - نمایش مسیر پرواز روی نقشه را فعال یا غیرفعال می کند.
Calibrate مختصات نقشه
Calibrate مختصات نقشه (برای سرزمین اصلی چین) - این تنظیم فقط مربوط به چین است.
Cache Map در پس زمینه
Cache Map در پس زمینه - این گزینه در صورتی مناسب است که محلی که قصد سفر دارید بدون اتصال به اینترنت باشد. قبل از خروج از خانه ، آن را روشن کرده و نقشه را از طریق WiFi بارگیری کنید. برنامه DJI Go 4 نقشه را ذخیره می کند تا هنگام رسیدن به محل پرواز خود بتوانید از آن استفاده کنید.
Clear Flight Route
Clear Flight Route - این گزینه به شما امکان می دهد داده های نقشه های بارگذاری شده را حذف کنید.
Cache ویدئو
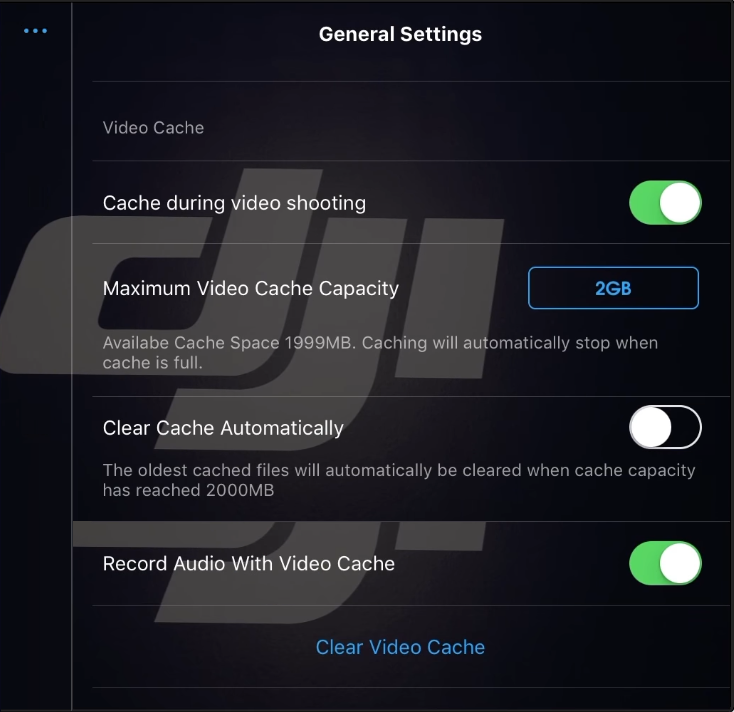
تنظیمات این منو بر مدیریت فایل های ذخیره شده تأثیر می گذارد. برای پیش نمایش تصاویر ، برنامه DJI Go 4 عکس ها و فیلم های با وضوح پایین (فایل های پروکسی) را در داخل برنامه ذخیره می کند. البته ، این فضا را در تلفن هوشمند / تبلت متصل اشغال می کند ، بنابراین می توانید این روند را کنترل کنید. جزئیات بیشتر در مورد هر بخش ، زیر بخش و تنظیمات.
حافظه نهان هنگام فیلمبرداری
حافظه نهان هنگام فیلمبرداری - هنگامی که گزینه فعال است ، فرآیند ذخیره سازی فایل های ضبط شده در حین تصویربرداری انجام می شود.
نکات
- اگر جریان ویدئو ناپایدار است یا از یک دستگاه هوشمند قدیمی استفاده می کنید که فضای خالی کافی ندارد ، سعی کنید Cache را در طول فیلم غیرفعال کنید عکاسی »برای بهبود کیفیت ارتباطات تصویری.
حداکثر ظرفیت ذخیره سازی ویدئو
حداکثر ظرفیت کش ویدئو - این گزینه به شما امکان می دهد حداکثر فضا را برای ذخیره حافظه نهان تنظیم کنید. 2 گیگابایت / 4 گیگابایت / 8 گیگابایت / 16 گیگابایت در دسترس است. به محض پر شدن صدا ، ذخیره حافظه پنهان به طور خودکار متوقف می شود.
پاک کردن حافظه پنهان به صورت خودکار
پاک کردن حافظه پنهان به صورت خودکار - این گزینه روند حذف حافظه پنهان را خودکار می کند... به محض پر شدن فضای اختصاص داده شده برای حافظه پنهان ، سیستم با حذف آن بطور خودکار آن را آزاد می کند.
ضبط صدا با کش ویدئو
ضبط صدا با کش ویدئو) - گزینه فعال / غیرفعال می شود ضبط حافظه پنهان صدا همراه با حافظه پنهان ویدئو (هنگام ضبط صدا از طریق میکروفون تلفن هوشمند / رایانه لوحی جفت شده).
پاک کردن حافظه پنهان ویدئو
پاک کردن کش ویدئو - به شما امکان می دهد تمام حافظه پنهان انباشته شده را در یک ضربه حذف کنید.
هشدارها
هشدارها - در اینجا می توانید تمام پیام هایی که تا کنون توسط سیستم هواپیماهای بدون سرنشین صادر شده است را مشاهده کنید.
پاک کردن همه هشدارها
پاک کردن همه هشدارها - به شما امکان می دهد یک ضربه بزنید تا حذف شود همه هشدارهای سیستم ذخیره شده

سایر
نام دستگاه
نام دستگاه - در اینجا کاربر می تواند نام پهپاد خود را تعیین کند.
تمام صفحه
تمام صفحه - این گزینه به کاربر اجازه می دهد روش نمایش را برای حالت تمام صفحه تنظیم کند (کل رابط را از صفحه اصلی پرواز پنهان می کند). می توانید رابط را با یک انگشت (تک انگشت) یا دو انگشت (دو انگشت) نشان دهید / پنهان کنید. برای پاک کردن صفحه اصلی پرواز از عناصر رابط مجازی ، با یک انگشت / دو انگشت روی صفحه به سمت پایین بکشید تا همه چیز به حالت اولیه بازگردد ، حرکت معکوس را از پایین به بالا تکرار کنید.
درباره
درباره - در این منوی فرعی کاربر می تواند اطلاعات مربوط به دستگاه را مشخص کند ، مانند نسخه سیستم عامل برنامه تلفن همراه / هواپیمای بدون سرنشین / کنترل از راه دور کنترل ، نسخه پایگاه داده پرواز و پایگاه داده برنامه ، و همچنین نیاز به به روز رسانی آنها را با ضربه زدن روی نماد "بررسی بروزرسانی" بررسی کنید.
شماره سریال کنترل پرواز
شماره سریال کنترل پرواز - در این زیرمنو کاربر می تواند شماره سریال کنترل کننده هواپیمای بدون سرنشین

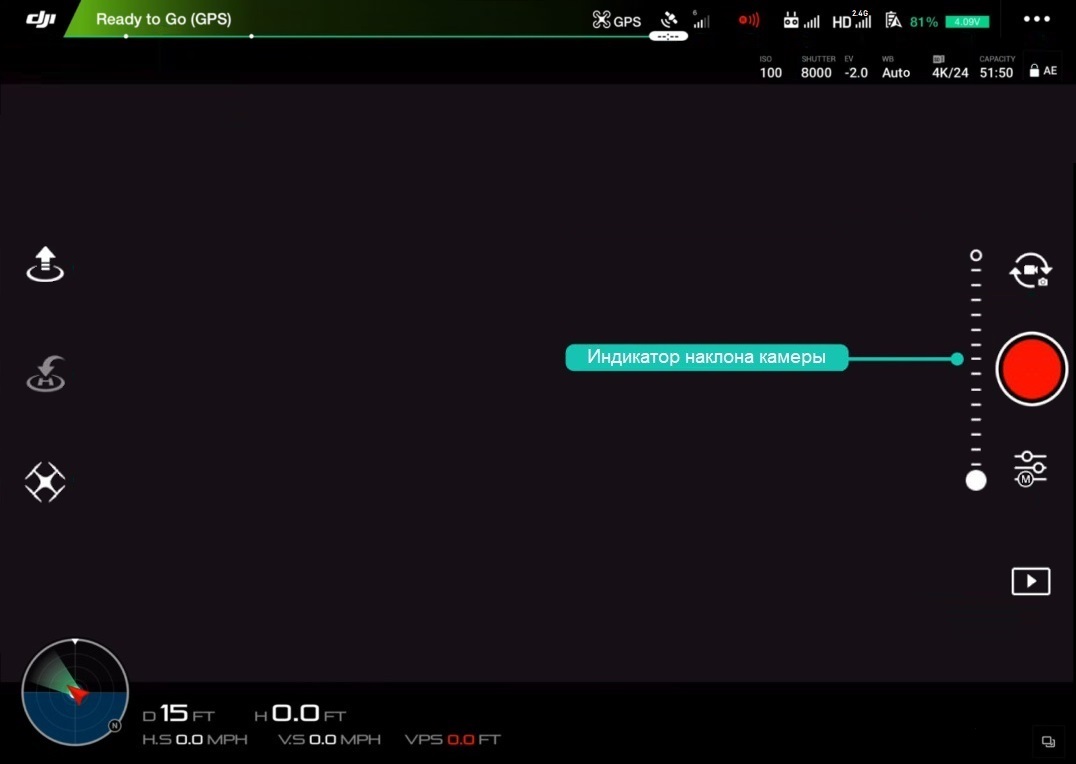
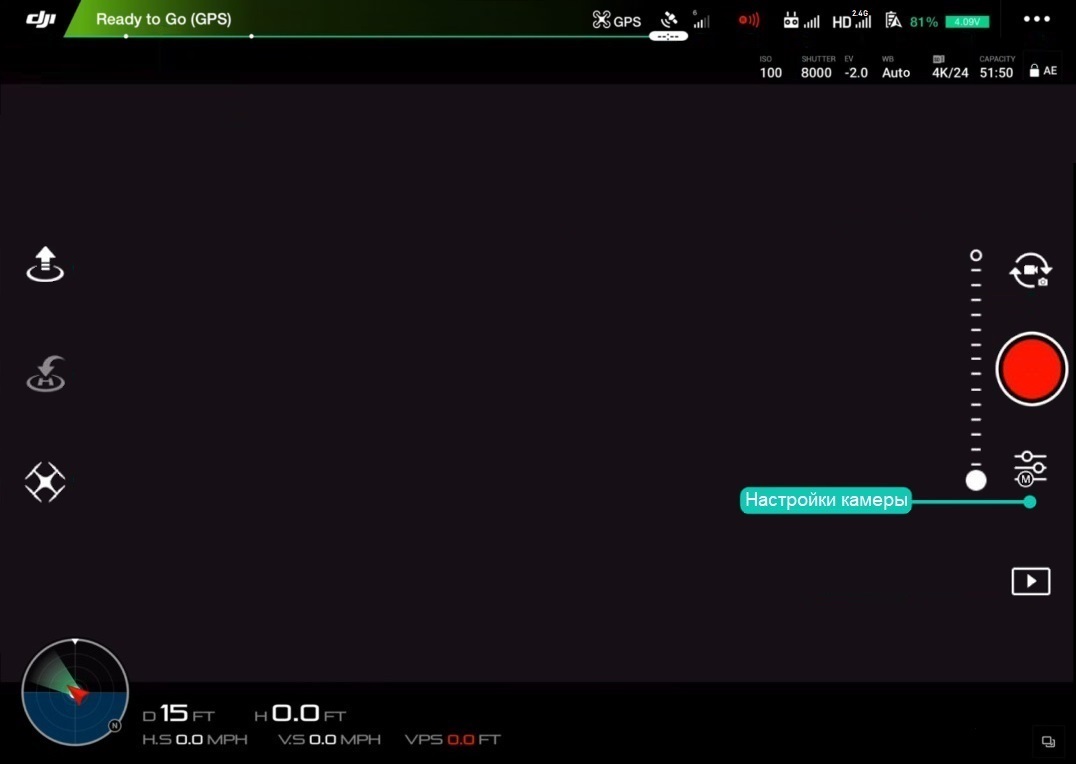
سمت راست صفحه اصلی پرواز
سمت راست صفحه اصلی - دسترسی به تنظیمات و کنترل دوربین را فراهم می کند. در اینجا کاربر قادر به کنترل دوربین و تنظیم کیفیت عکسبرداری / فیلمبرداری و همچنین انتخاب فرمت ضبط مواد خواهد بود. علاوه بر این ، برای هر تنظیم به طور جداگانه.
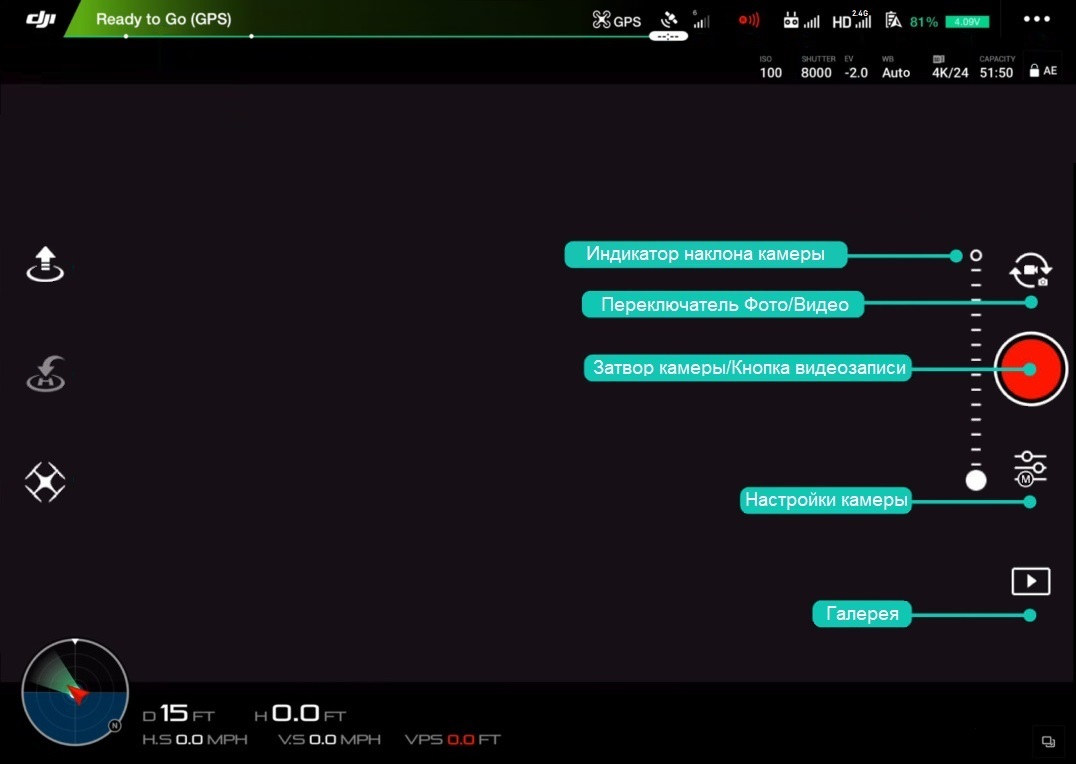
نشانگر شیب دوربین
نشانگر شیب دوربین - خلبان را از موقعیت فعلی کشتی مطلع می کند دوربین نسبت به افق
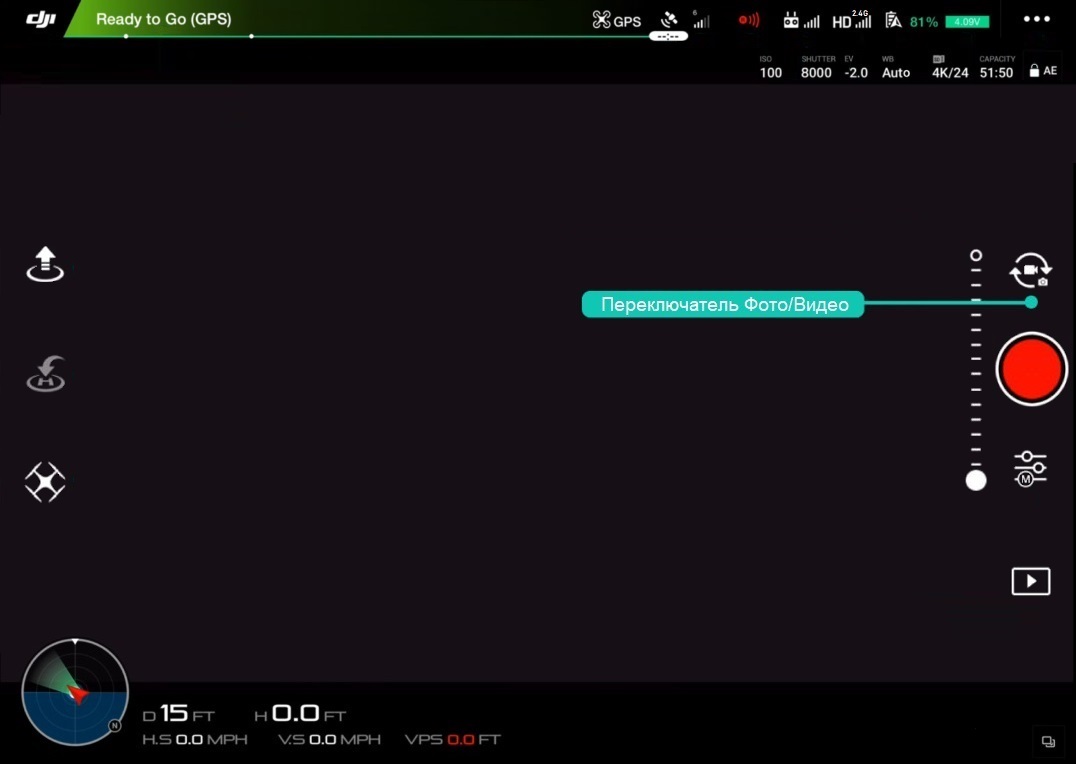
انتخابگر عکس / ویدئو
انتخاب حالت عکس / فیلم - تغییر حالت های عکس و فیلمبرداری به حالت فعلی با نماد در مرکز سوئیچ نشان داده می شود ، اگر "دوربین فیلمبرداری" - حالت ضبط ویدئو ، اگر "دوربین" - حالت عکاسی است.
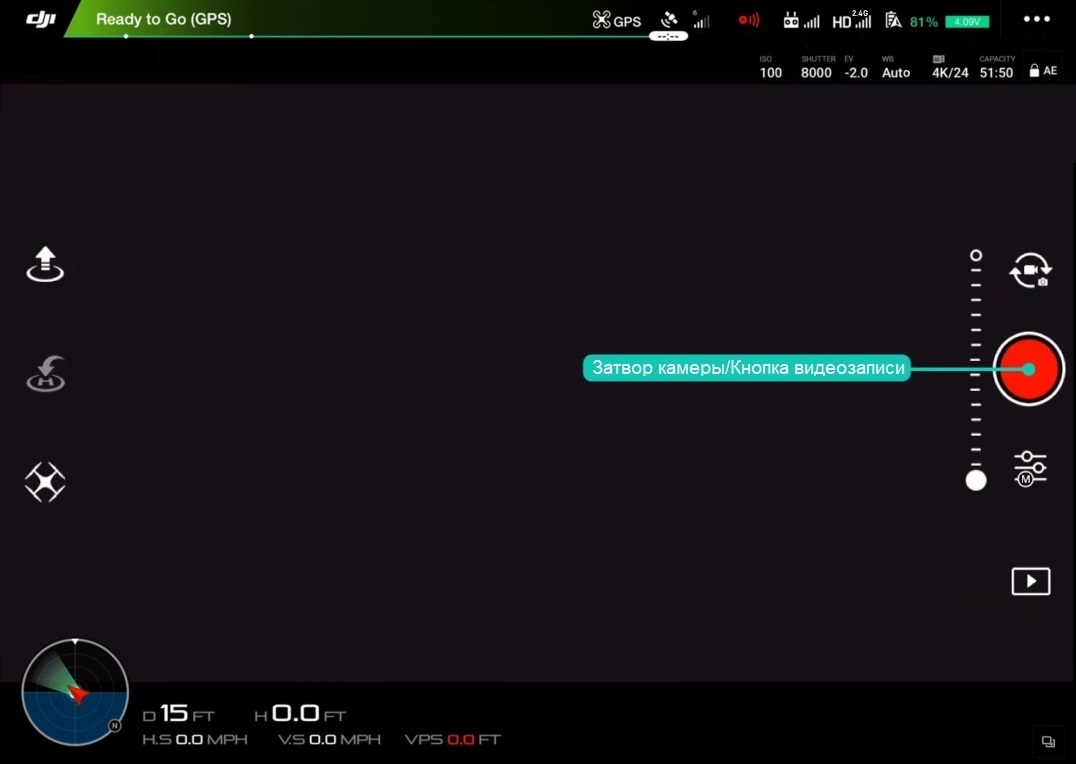
دکمه شاتر دوربین / فیلمبرداری
دکمه شاتر دوربین / فیلمبرداری - یک دکمه مجازی که عکس (دکمه سفید) یا شروع / توقف فیلمبرداری (دکمه قرمز).
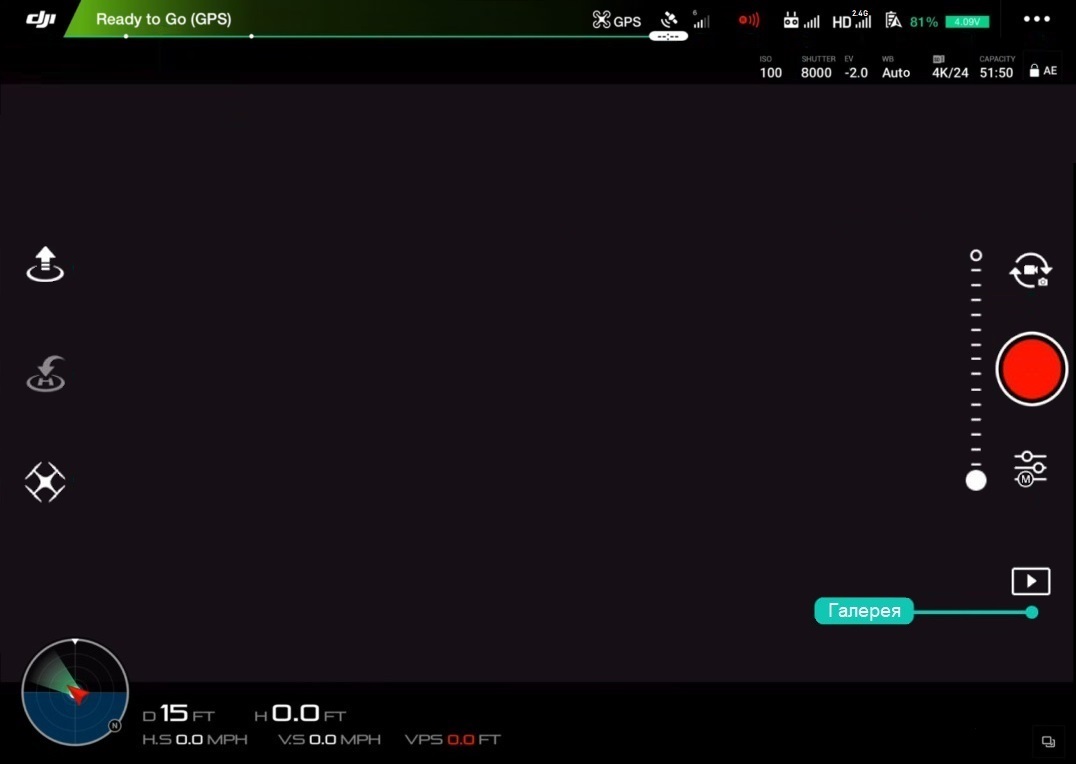
گالری
یک دکمه مجازی که به شما امکان می دهد با مطالب فیلمبرداری شده قبلی به گالری بروید.
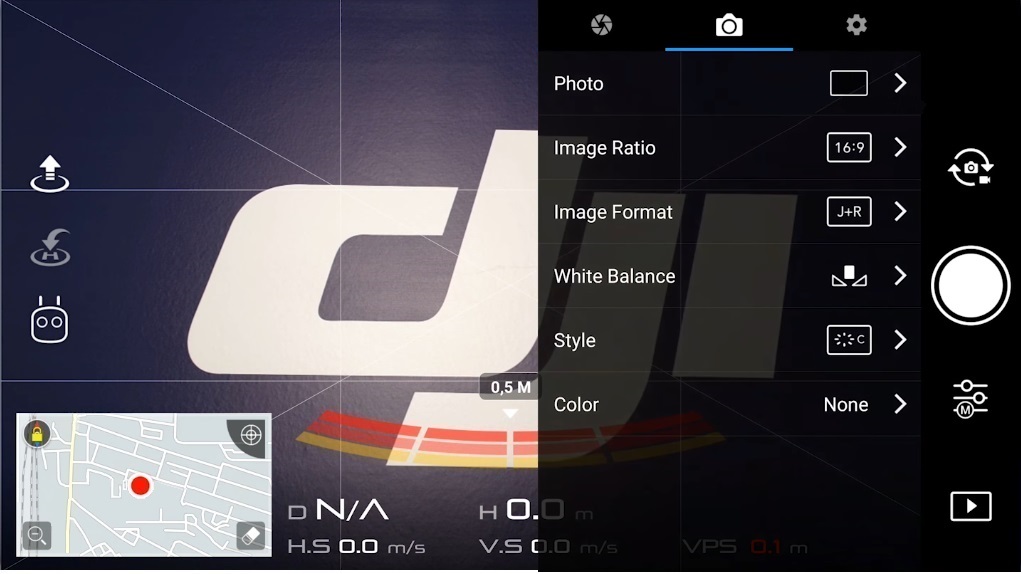
تنظیمات دوربین
دسترسی سریع به تنظیمات دوربین را فراهم می کند. منو شامل سه بخش تنظیمات است: عکس / فیلم / تنظیمات اضافی (نماد چرخ دنده). جزئیات بیشتر در مورد هر بخش و تنظیمات.
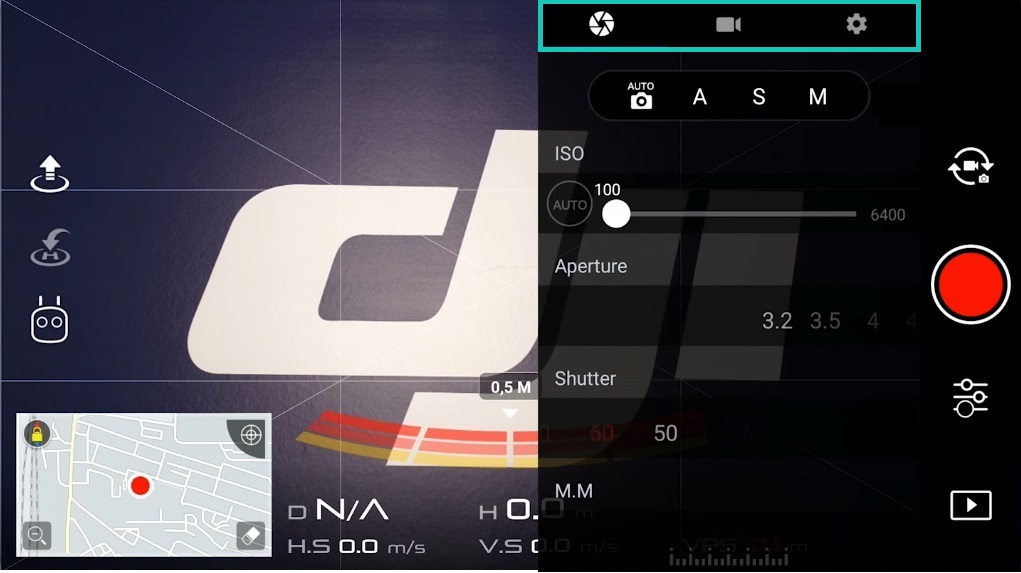
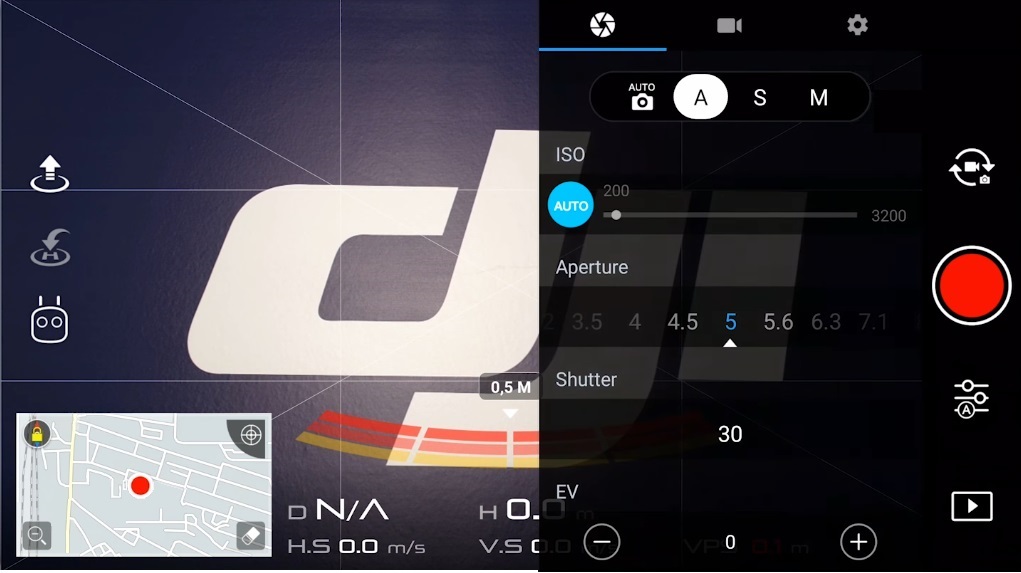
عکس
این بخش از چهار حالت تنظیم تشکیل شده است:
- خودکار
- A (دیافراگم)
- S (سرعت شاتر)
- M (دستی)
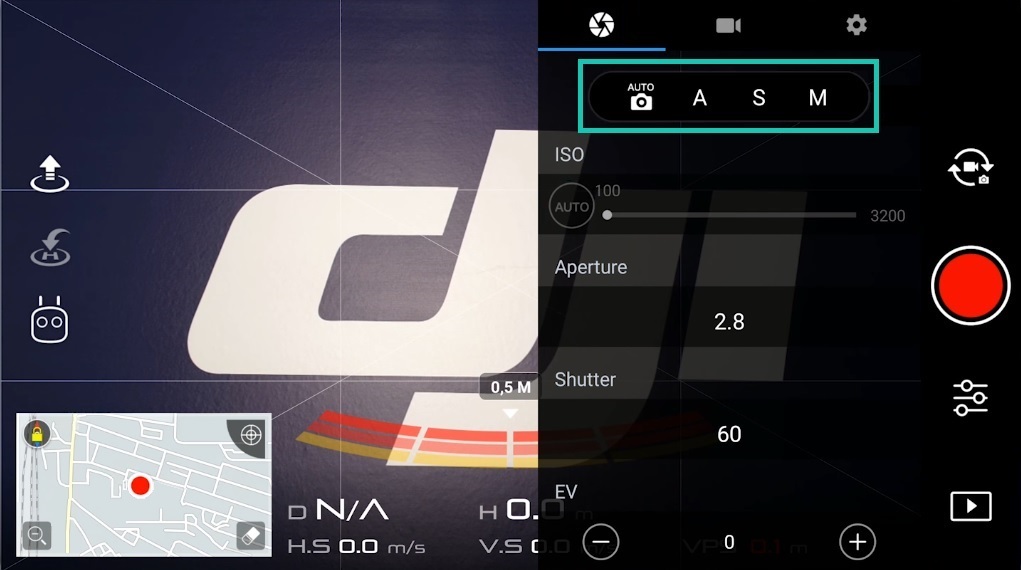
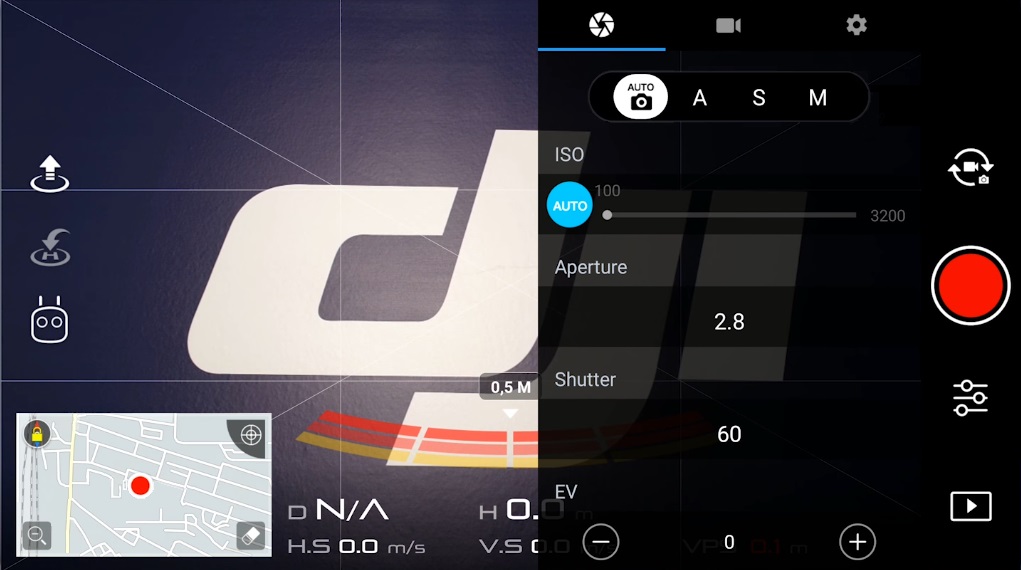
حالت خودکار
حالت خودکار برای مبتدیان عالی است زیرا دوربین به طور خودکار ISO و سرعت شاتر (و برای برخی از هواپیماهای بدون سرنشین نیز مقدار دیافراگم) را تنظیم می کند به جز مقدار EV ، که به صورت دستی تنظیم می شود.
حالت A
حالت - حالت خودکار با اولویت بر مقدار دیافراگم. این بدان معناست که در این حالت ، با تنظیم مقدار دیافراگم ، سیستم بطور خودکار بقیه پارامترها را تنظیم می کند.
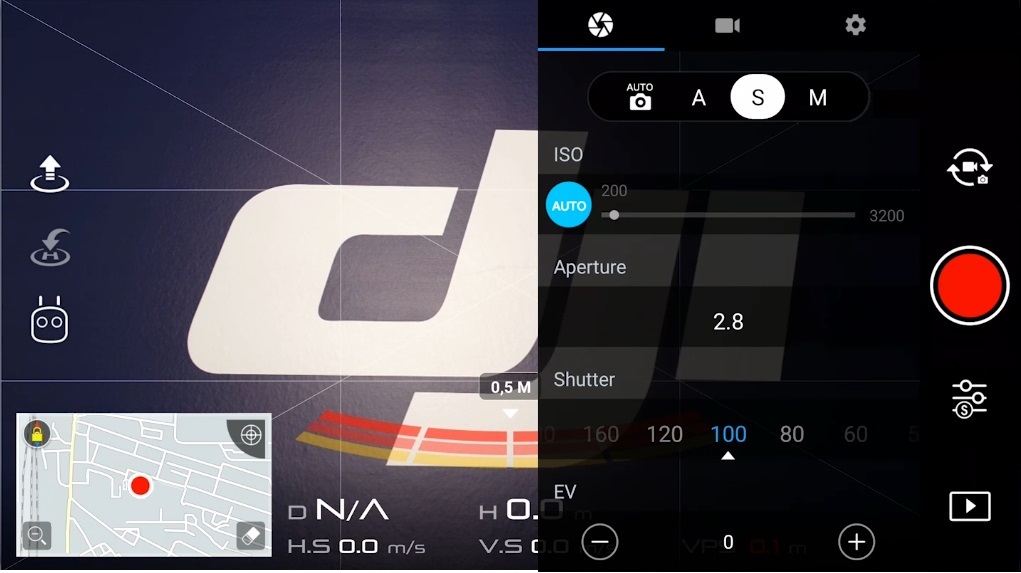
حالت S
حالت S - حالت خودکار با اولویت سرعت شاتر. این بدان معناست که در این حالت ، با تنظیم مقدار Shutter Speed ، سیستم بطور خودکار بقیه پارامترها را تنظیم می کند.
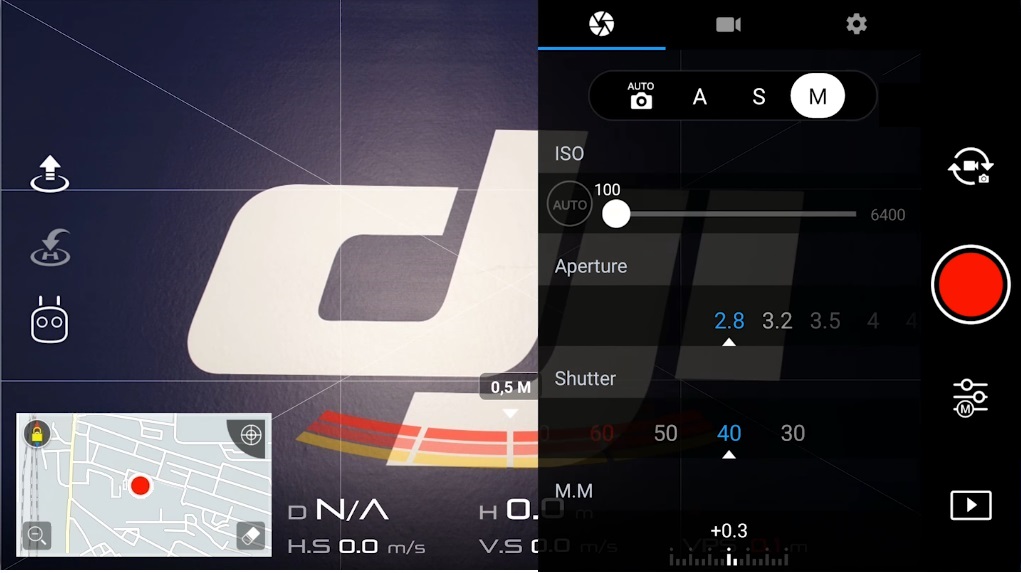
حالت M
حالت دستی - حالت پیشرفته تری که به شما امکان می دهد تنظیمات ISO ، سرعت شاتر (و برای برخی از هواپیماهای بدون سرنشین نیز ارزش دیافراگم).
ISO
این گزینه حساسیت دوربین را نسبت به نور تنظیم می کند. هرچه مقدار ISO بیشتر باشد ، دوربین نسبت به نور حساس تر است. اما این بدان معناست که نویز / دانه بیشتری در تصویر شما وجود خواهد داشت.
دیافراگم
دیافراگم - این تنظیم میزان عبور نور از لنز را کنترل می کند ، که تعیین می کند چگونه پیش زمینه و پس زمینه تار است. این گزینه معمولاً فقط در هواپیماهای بدون سرنشین با دوربین های قوی تر یافت می شود.
سرعت شاتر
سرعت شاتر- این تنظیم به شما این امکان را می دهد که مدت زمان باز بودن شاتر دوربین را کنترل کرده و به شما این امکان را می دهد که سوژه های واضحی را در حال حرکت ثبت کنید.
EV
EV (مقدار نوردهی) - این تنظیم برای کاربران پیشرفته مناسب است. اگر هیچ ایده ای در مورد هدف آن ندارید ، بهتر است درباره EV بیشتر بدانید.
اطلاعات
- هنگامی که در حالت دستی هستید ، می توانید ببینید تنظیمات شما چقدر با تنظیمات توصیه شده توسط سیستم فاصله دارد. بنابراین ، کاربر همیشه از تنظیمات خود در حالت دستی آگاه خواهد بود.
- برای اینکه بدانید کدام یک از حالت های عکس انتخاب شده است ، فقط توجه خود را به نماد معطوف کنید تا تنظیمات دوربین را وارد کنید ، جایی که می توانید تعیین حروف حالت فعلی (
) را مشاهده کنید.
ویدئو
بخش تنظیم کیفیت فیلم. جزئیات بیشتر در مورد هر بخش و تنظیمات.
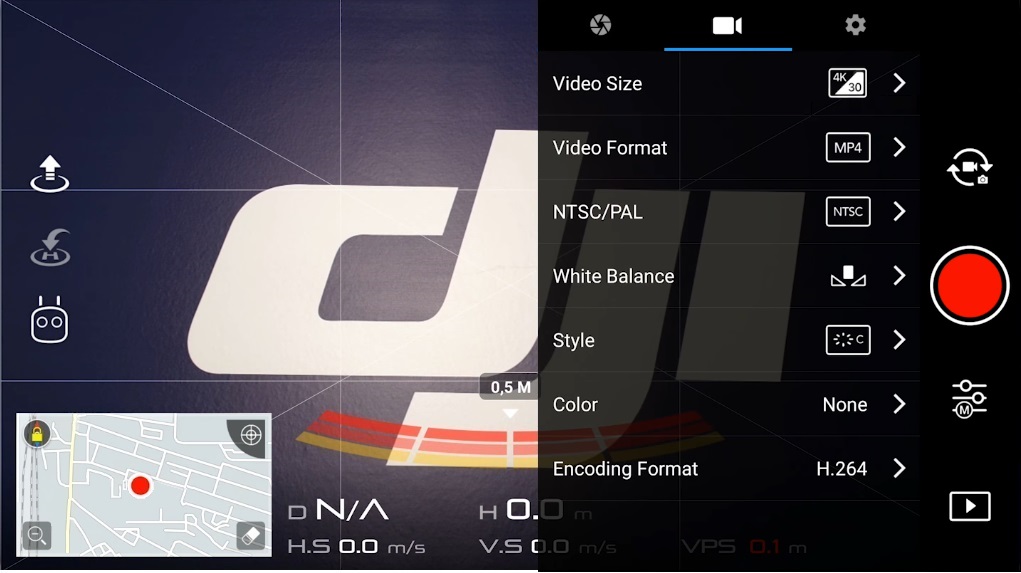
اندازه ویدئو
در اینجا می توانید اندازه تصویر و نرخ فریم را تنظیم کنید.

فرمت ویدئو
در اینجا می توانید فرمت فایل ویدیویی ضبط شده را تنظیم کنید.معمولاً فرمت MOV یا MP4 است.
- MOV: برای کاربران اپل مناسب است.
- MP4: مربوط به کاربران Windows PC / Laptop.

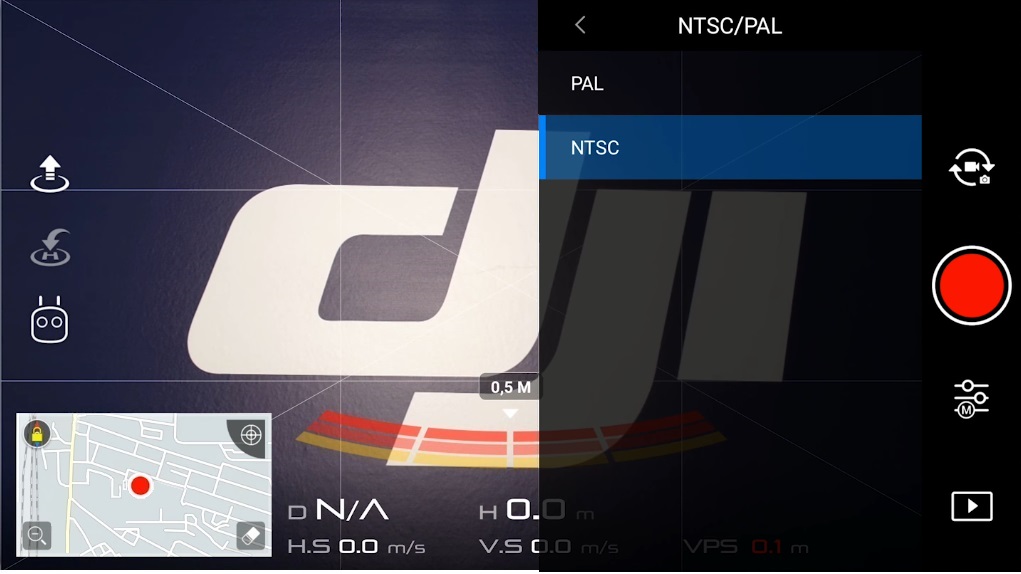
NTSC / PAL
سیستم نمایش PAL / NTSC در اینجا انتخاب شده است.
- PAL: رایج ترین فرمت مورد استفاده در اروپا و بخش هایی از آسیا است.
- NTSC: رایج ترین فرمت مورد استفاده در بیشتر قاره آمریکا و کانادا است.
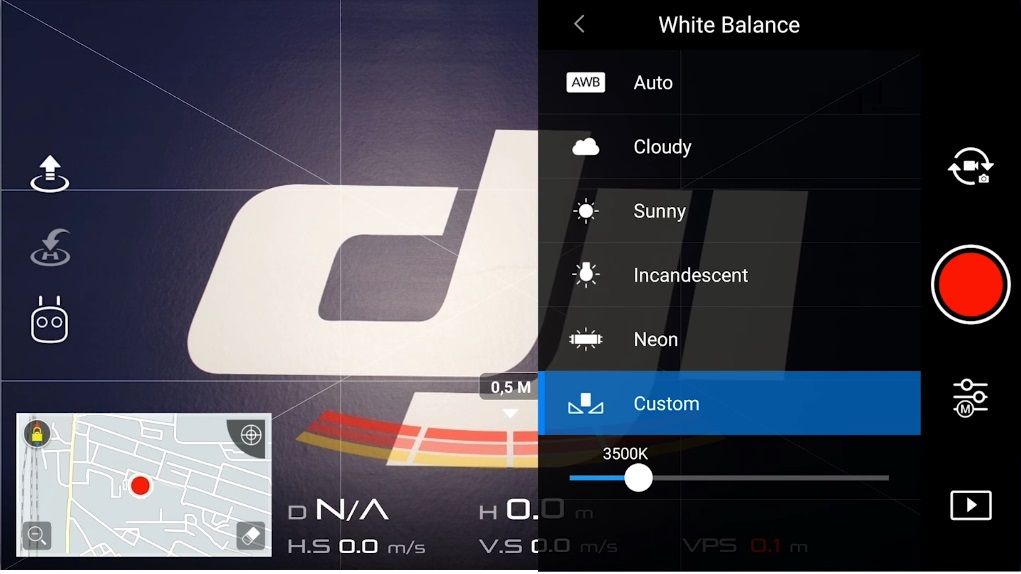
تراز سفید
تراز سفید - این تنظیم بر طیف رنگی تصاویر تأثیر می گذارد و به شما امکان می دهد تا رنگ های زرد را اصلاح کنید ، قرمز و آبی
در منوی تعادل رنگ سفید موارد زیر موجود است:
- AWB (تراز سفید خودکار) - سفید اتوماتیک تعدیل تعادل
- ابری یک تنظیم تعادل از پیش تعیین شده سفید برای عکاسی در شرایط ابری است.
- Sunny یک تنظیم تعادل از پیش تعیین شده سفید برای عکاسی در شرایط آفتابی است.
- رشته ای یک تنظیم تعادل سفید از پیش تعیین شده برای عکاسی در زیر نور مصنوعی با لامپ های رشته ای است.
- نئون - تنظیم تعادل از پیش تعیین شده سفید برای عکاسی در زیر نور مصنوعی با لامپهای فلورسنت.
- سفارشی - تنظیم دستی برای تنظیم بر اساس ترجیحات شما.
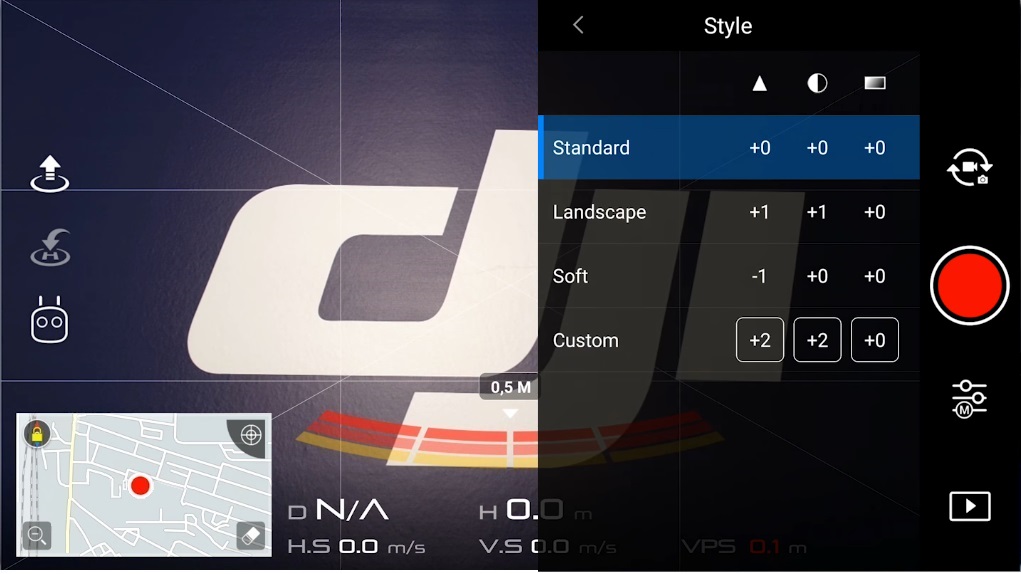
سبک
سبک - در اینجا کاربر می تواند وضوح ، کنتراست و اشباع تصاویر گرفته شده را تنظیم / تنظیم کند.
گزینه های زیر در منوی Style موجود است:
- استاندارد - سبک از پیش تعیین شده با مقادیر استاندارد / صفر برای وضوح ، کنتراست و اشباع.
- منظره - سبک منظره از پیش تعیین شده برای وضوح ، کنتراست و اشباع.
- نرم - سبک نرم از پیش تعیین شده برای وضوح ، کنتراست و اشباع.
- سفارشی - وضوح ، کنتراست و اشباع را به صورت دستی تنظیم کنید.
نکات
- اگر پس از تصویربرداری ، کاربر قصد ویرایش فیلم را دارد ، توصیه می شود که به سبک استاندارد عکاسی کنید.
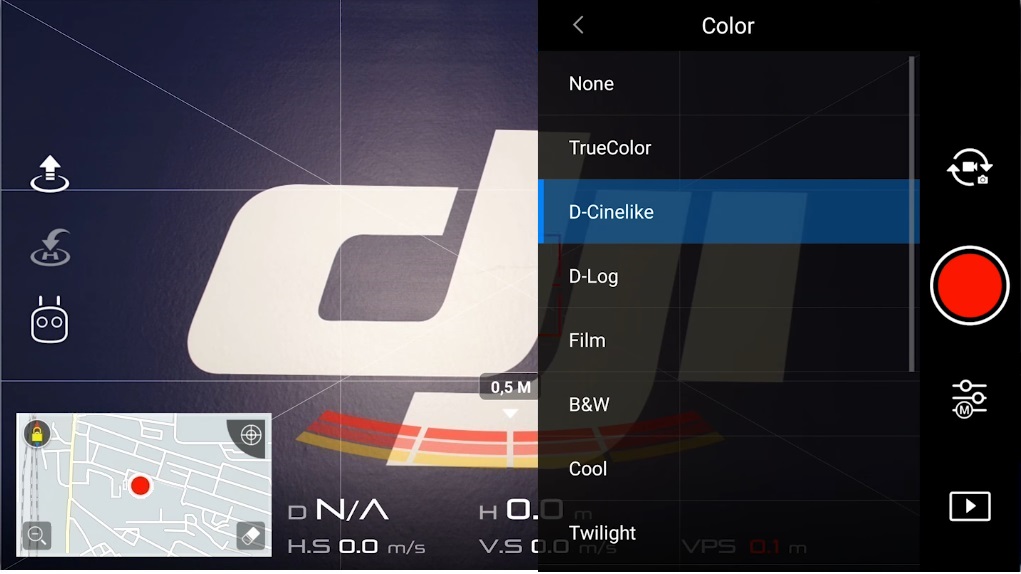
رنگ
رنگ نوعی مجموعه از فیلترهای رنگ از پیش تعیین شده است که به شما امکان می دهد تن های مختلف فیلم ضبط شده را تنظیم کنید. اگر پس از ضبط ویدیو پس پردازشی برنامه ریزی نشده باشد ، کاربر می تواند از یکی از فیلترهای از پیش تعیین شده موجود استفاده کند. اگر پس از فیلمبرداری ، ویدئو ویرایش شود ، توصیه می شود از پیش تنظیماتی مانند D-Cinelike و D-Log (M) را انتخاب کنید.
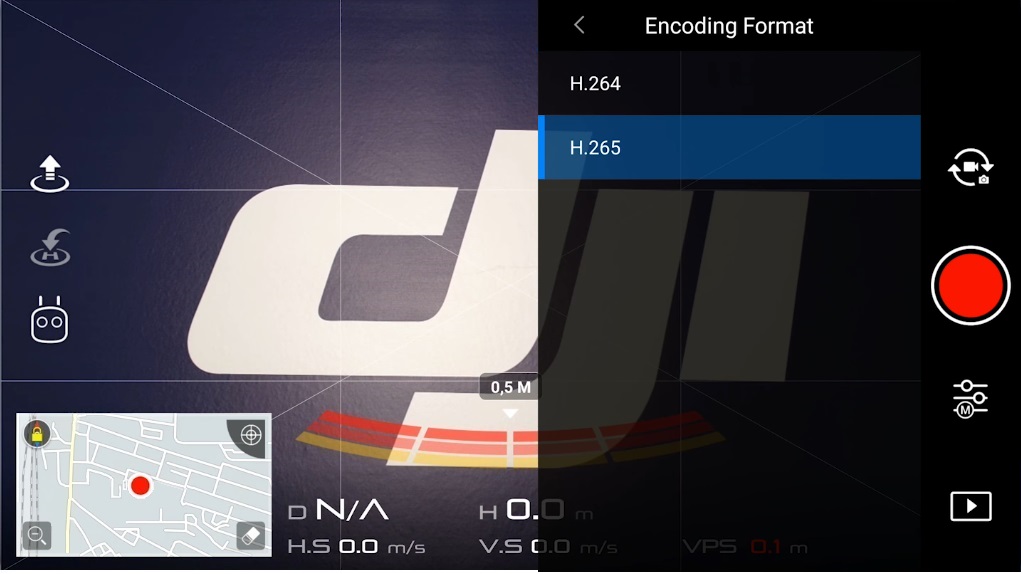
قالب رمزگذاری
قالب رمزگذاری - این تنظیم به شما امکان می دهد یکی از دو قالب فشرده سازی موجود ، کدک H ، 264 را انتخاب کنید. یا H.265.
- کدک H.264 - فیلم ضبط شده فضای بیشتری را نسبت به کدگذاری H.265 اشغال می کند ، اما در عین حال امکان ضبط فیلم 4K را نیز دارد. با سرعت 60 فریم بر ثانیه
- H.265 Codec - فیلم ضبط شده فضای کمتری نسبت به کدگذاری H.264 اشغال می کند ، اما فیلمبرداری 4K را می توان با حداکثر 30 فریم بر ثانیه ضبط کرد.
تنظیم کیفیت عکس
اگر در بخش تنظیمات کیفیت فیلم ، روی نماد تغییر حالت عکس / تصویر (
) ضربه بزنید ، تنظیمات با کیفیت عکس جزئیات بیشتر در مورد هر تنظیم.
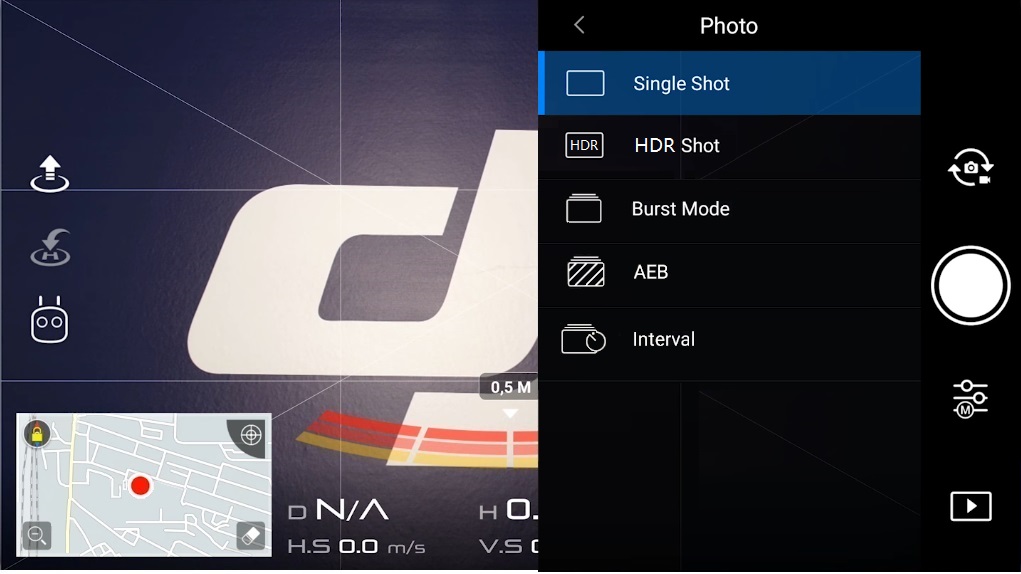
عکس
دسترسی به حالتهای عکسبرداری را فراهم می کند.
- تک عکس - به شما امکان می دهد یک عکس بگیرید.
- HDR Shot - به شما امکان می دهد یک عکس HDR (محدوده دینامیکی بالا) بگیرید. در این حالت ، دوربین 3 یا بیشتر عکس با تنظیمات نوردهی متفاوت می گیرد و سپس آنها را با هم ترکیب می کند. یک تصویر HDR عکسی با اطلاعات بیشتر در قسمت های برجسته و سایه به شما می دهد ، که می تواند منجر به تصاویر JPEG واضح تر و پویاتر شود. توجه: در صورت داشتن نرم افزار پس از پردازش ، توصیه می شود از حالت AEB توضیح داده شده در زیر برای ایجاد تصاویر HDR به جای HDR Shot استفاده کنید ، زیرا نتیجه بسیار بهتر است.
- حالت پشت سر هم - به شما امکان می دهد یک عکس پشت سر هم از 3/5/7/10/14 عکس بگیرید.
- AEB - مجموعه ای از عکسها با نوردهی متفاوت 3/5
- فاصله - حالت عکاسی تایم لپس 5 ثانیه / 7 ثانیه / 10 ثانیه / 15 ثانیه / 30 ثانیه / 60 ثانیه این حالت به شما این امکان را می دهد تا با تاخیر زمانی عکاسی کنید ، که در صورت تلاش برای گرفتن عکس سلفی و نیاز به زمان برای رسیدن به موقعیت / موقعیت دلخواه می تواند مفید باشد.
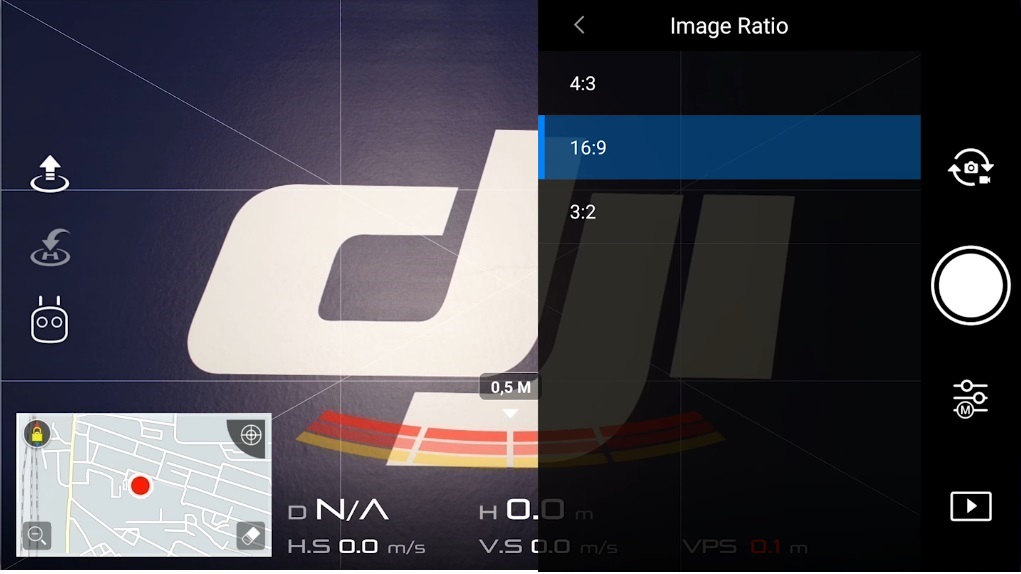
نسبت تصویر
نسبت تصویر - به شما امکان می دهد نسبت تصویر را تنظیم کنید.
قالب تصویر
قالب تصویر - به شما امکان می دهد قالب عکس را انتخاب کنید.
- RAW - به دلیل فشرده نشدن فایل ها ، فرمت بدون ضرر محسوب می شود. این بدان معناست که شما هر بیت اطلاعات خام عکس را تقریباً مستقیماً از سنسور دوربین خود دریافت می کنید. این به شما آزادی بیشتری در پس پردازش می دهد ، به عنوان مثال ، هنگامی که می خواهید جزئیات را در مکان های تاریک و روشن ذخیره یا بازیابی کنید. توجه به این نکته ضروری است که فایل های RAW بسیار بزرگتر از فایل های JPEG هستند و نوشتن آنها روی کارت حافظه کمی طول می کشد. در این زمینه ، اکیداً توصیه می شود از کارت حافظه ارزان استفاده نکنید ، بلکه فقط از کارت هایی با سرعت خواندن / نوشتن بالا استفاده کنید.
- JPEG - یک قالب کامل در نظر گرفته می شود زیرا فایل ها بسیار کوچکتر و فشرده هستند.این بدان معناست که آنها قبلاً داده های مربوط به تصویر را از دست داده اند ، بنابراین شما گزینه های کمتری برای ویرایش یا بازیابی جزئیات خواهید داشت.
- JPEG RAW - این حالت به شما امکان می دهد در فرمت RAW و JPEG عکس بگیرید. مزیت این روش این است که در نهایت هم فایل های اصلی اصلی RAW و هم JPEG های کوچکتر به دست می آورید. توجه داشته باشید که هنگام عکاسی در این حالت ، به فضای بیشتری بر روی کارت حافظه احتیاج دارید و نوشتن تصویر بر روی کارت بیشتر طول می کشد زیرا 2 فایل مختلف را همزمان می نویسد.

تراز سفید
تراز سفید - این گزینه عملکردهای مشابه تنظیمات کیفیت فیلم را ارائه می دهد.
Style
Style - این گزینه عملکردهای مشابه تنظیمات کیفیت فیلم را ارائه می دهد.
رنگ
رنگ - این گزینه عملکردهای مشابه تنظیمات کیفیت فیلم را ارائه می دهد.
تنظیمات اضافی (نماد چرخ دنده)
این بخش دسترسی به تعدادی تنظیمات اضافی را که بر عکسبرداری و فیلمبرداری تأثیر می گذارد ، فراهم می کند. جزئیات بیشتر در مورد هر تنظیم.
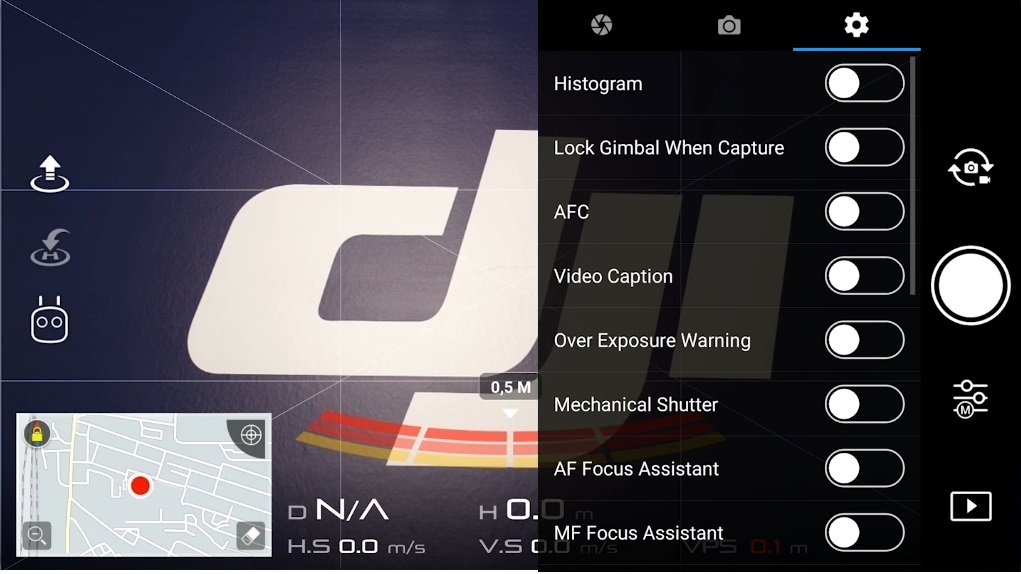
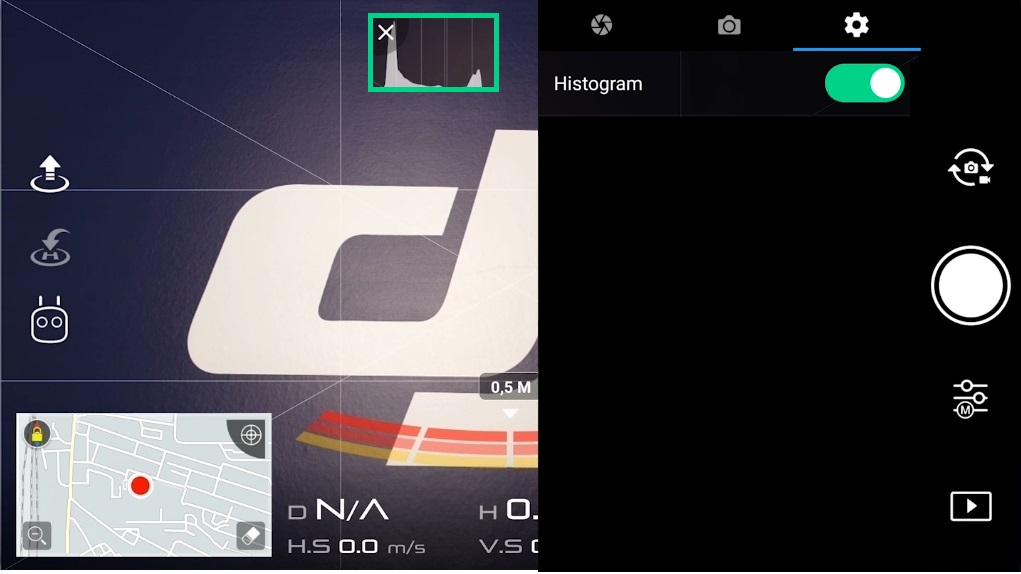
هیستوگرام
هیستوگرام - این گزینه امکان نمایش نمودار را نشان می دهد که روشنایی کلی صحنه را نشان می دهد. این گزینه برای کاربران پیشرفته مناسب است. اگر نمی دانید این چیست ، توصیه می کنیم با هدف هیستوگرام در تصویربرداری بیشتر آشنا شوید.
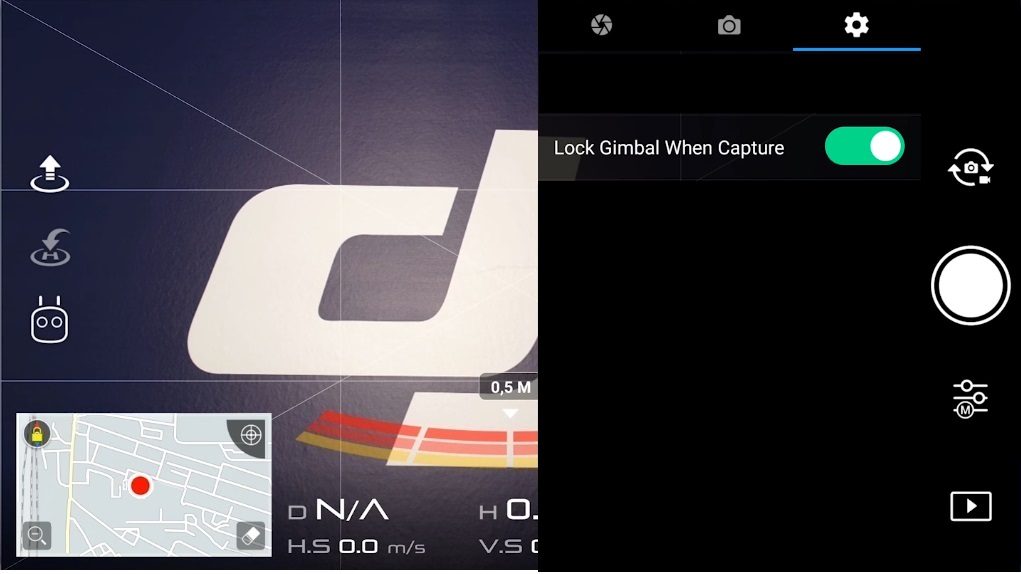
قفل کردن گیمبال هنگام عکاسی
قفل کردن گیمبال هنگام ضبط - این گزینه به شما امکان می دهد با قفل کردن گیمبال از تاری در هنگام نوردهی طولانی جلوگیری کنید. به
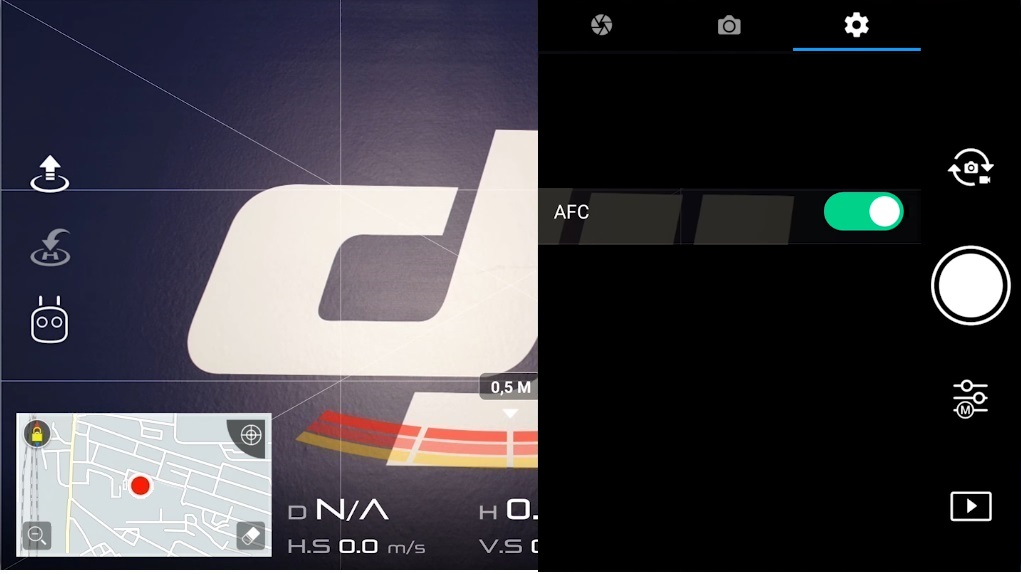
AFC
AFC - این گزینه فوکوس خودکار طولانی را فعال می کند ، در نتیجه به فوکوس خودکار اجازه می دهد تا با تغییرات هنگام عکسبرداری سازگار شود. وقتی گزینه فعال نیست ، پس از انتخاب ناحیه فوکوس ، فوکوس در حین عکاسی تغییر نمی کند.
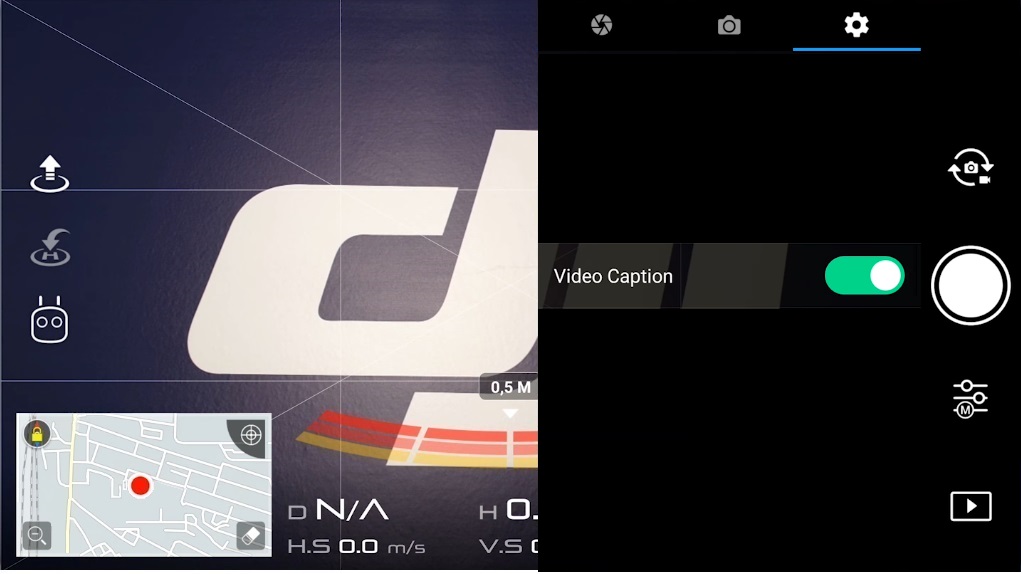
عنوان ویدیو
زیرنویس ویدئو - اگر این گزینه فعال است ، به همراه ضبط ویدئو به عنوان فایل های زیرنویس ضبط می شود ، چنین داده هایی ، مانند موقعیت هواپیمای بدون سرنشین در زمان بررسی ، تاریخ و زمان بررسی ، قرائت سنسورها و پارامترهای بررسی. بنابراین ، اگر این ویدئو را با استفاده از پخش کننده ای که از این عملکرد پشتیبانی می کند پخش کنید ، می توانید داده های پرواز خود را به طور خودکار روی تصویر نمایش دهید.
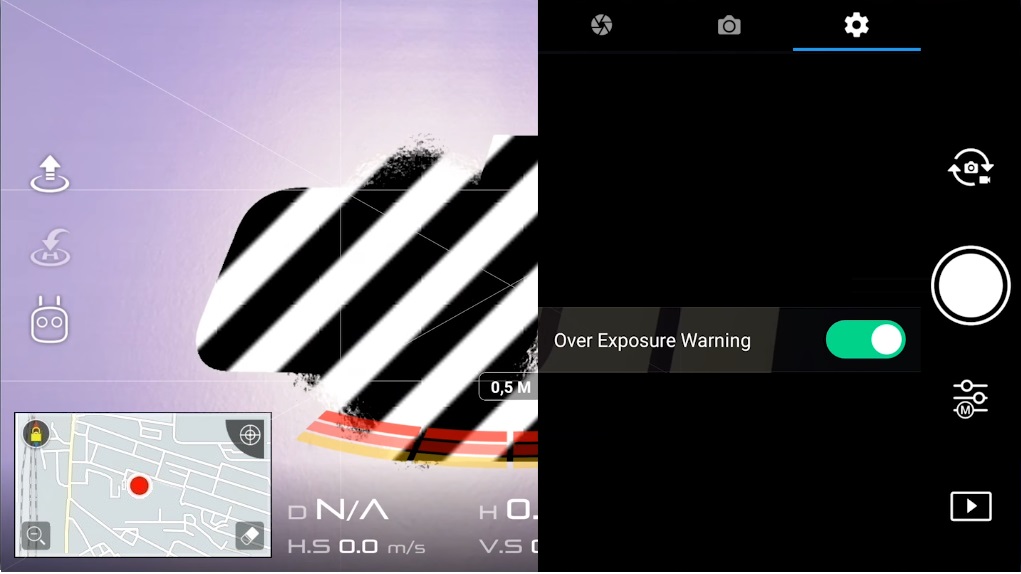
هشدارهای بیش از حد نوردهی
هشدارهای بیش از حد نوردهی - این گزینه نمایش نشانگر را به شکل نوارهای سیاه و سفید فعال می کند برجسته کردن مناطق بیش از حد در معرض و جایی که اطلاعات پیکسل به طور کامل از بین می رود. این نوارها می توانند به کاربر کمک کنند تا به سادگی تصویر را با تنظیم دوربین تا زمانی که بسیاری از این نوارها ظاهر شوند ، بدست آورد. این گزینه زمانی مناسب است که ، برای مثال ، صفحه اصلی در زیر نور آفتاب قرار می گیرد و به کاربر اجازه نمی دهد یک تصویر واضح ببیند. توجه: این خطوط فقط بر روی صفحه نمایش داده می شوند و بر این اساس در تصاویر به پایان رسیده نخواهد بود.
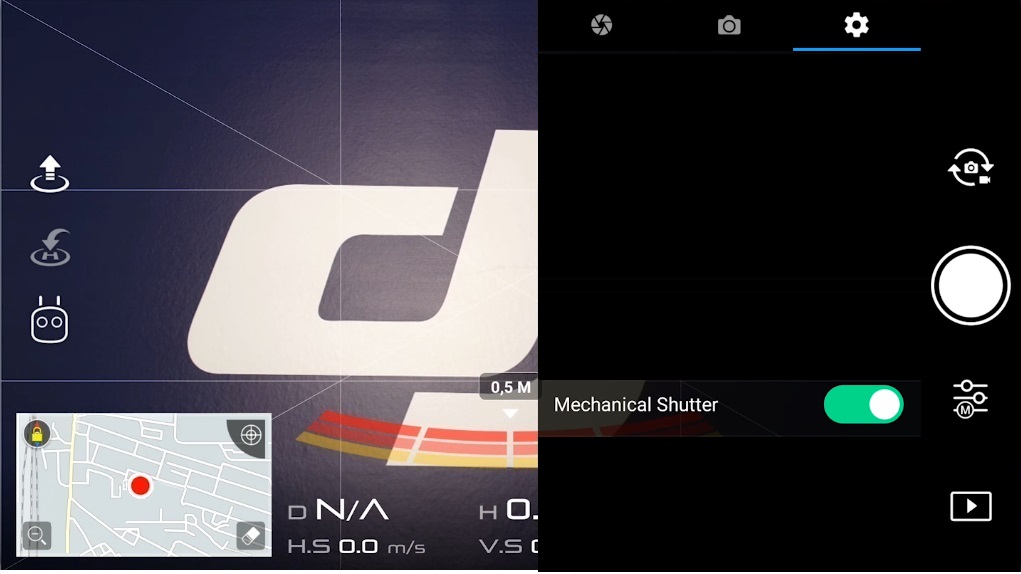
شاتر مکانیکی
شاتر مکانیکی - این گزینه شاتر مکانیکی را برای عکاسی فعال می کند. در دسترس برای هواپیماهای بدون سرنشین مانند Phantom 4 Pro (V2.0) و Inspire 2. تفاوت بین شاتر مکانیکی و شاتر الکترونیکی این است که شاتر مکانیکی با باز و بسته شدن کرکره های جلوی سنسور ، شاتر الکترونیکی ، نوردهی را کنترل می کند. خود سنسور را روشن و خاموش می کند. در نتیجه ، هنگام عکاسی از اجسام سریع در حال حرکت با دوربین با شاتر مکانیکی ، اعوجاج حذف می شود ، که نمی توان در مورد دوربینی با دوربین الکترونیکی گفت.
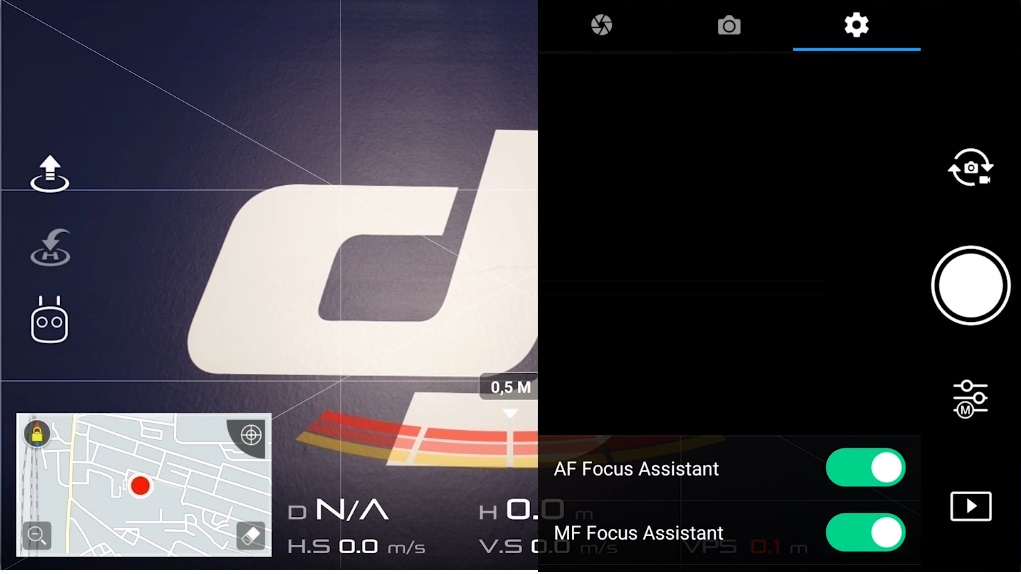
AF / MF Focus Assistant
AF Focus Assistant / MF Focus Assistant - گزینه ، کمک فوکوس خودکار / دستی را فعال می کند. در این حالت ، هنگام فوکوس در حالت عکس ، تصویر برای راحتی ده برابر بزرگ می شود.
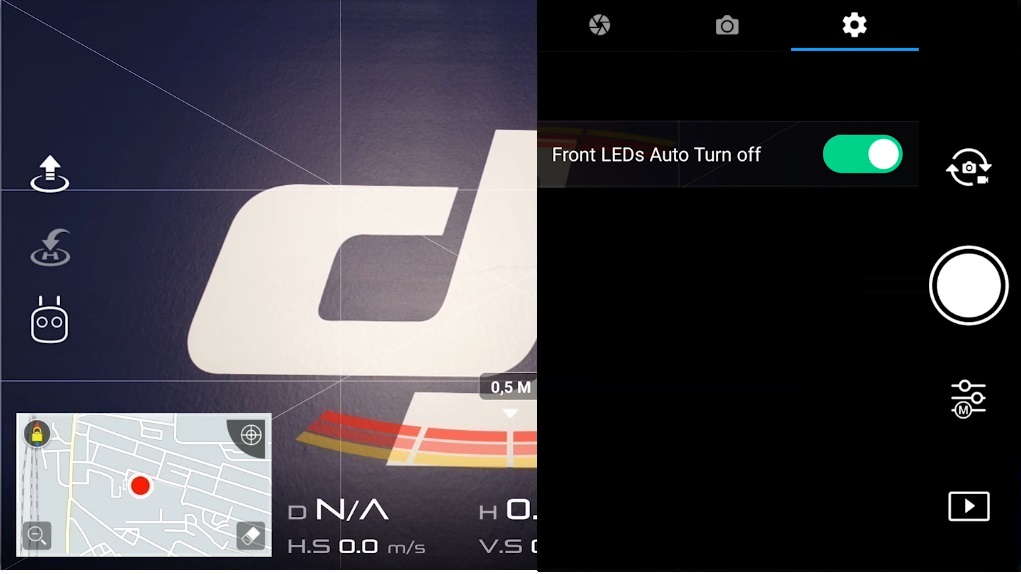
LED های جلو خاموش می شود خودکار
LED های جلو خاموش می شود - هنگامی که این گزینه فعال است ، LED هواپیما به طور خودکار روشن می شود هنگام شلیک خاموش...
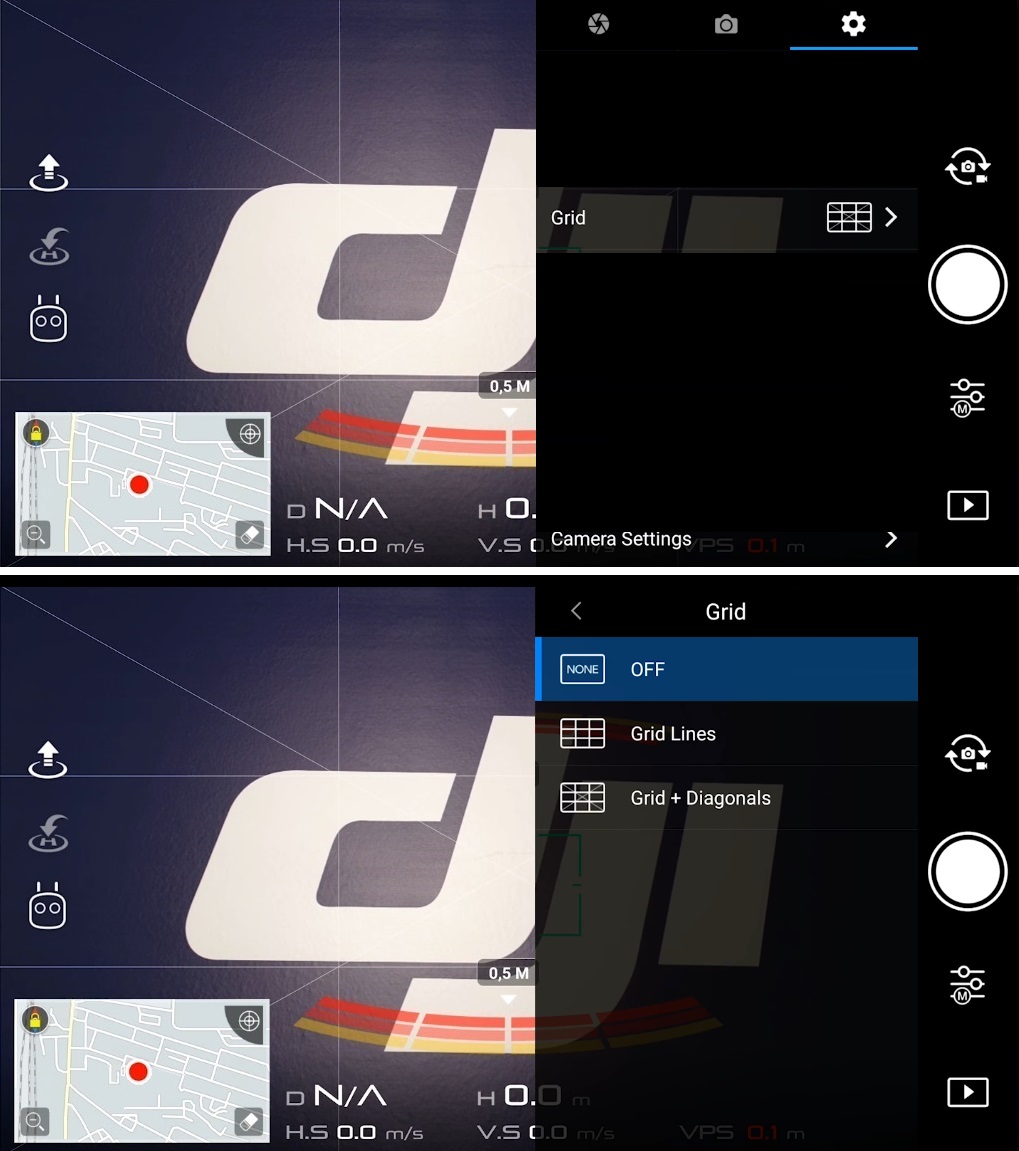
Grid
Grid - این گزینه به شما امکان می دهد شبکه را نمایش دهید ، خطوط مورب را به این شبکه اضافه کنید یا آن را به طور کلی غیرفعال کنید به آنها روی عکس های تمام شده ظاهر نمی شوند.
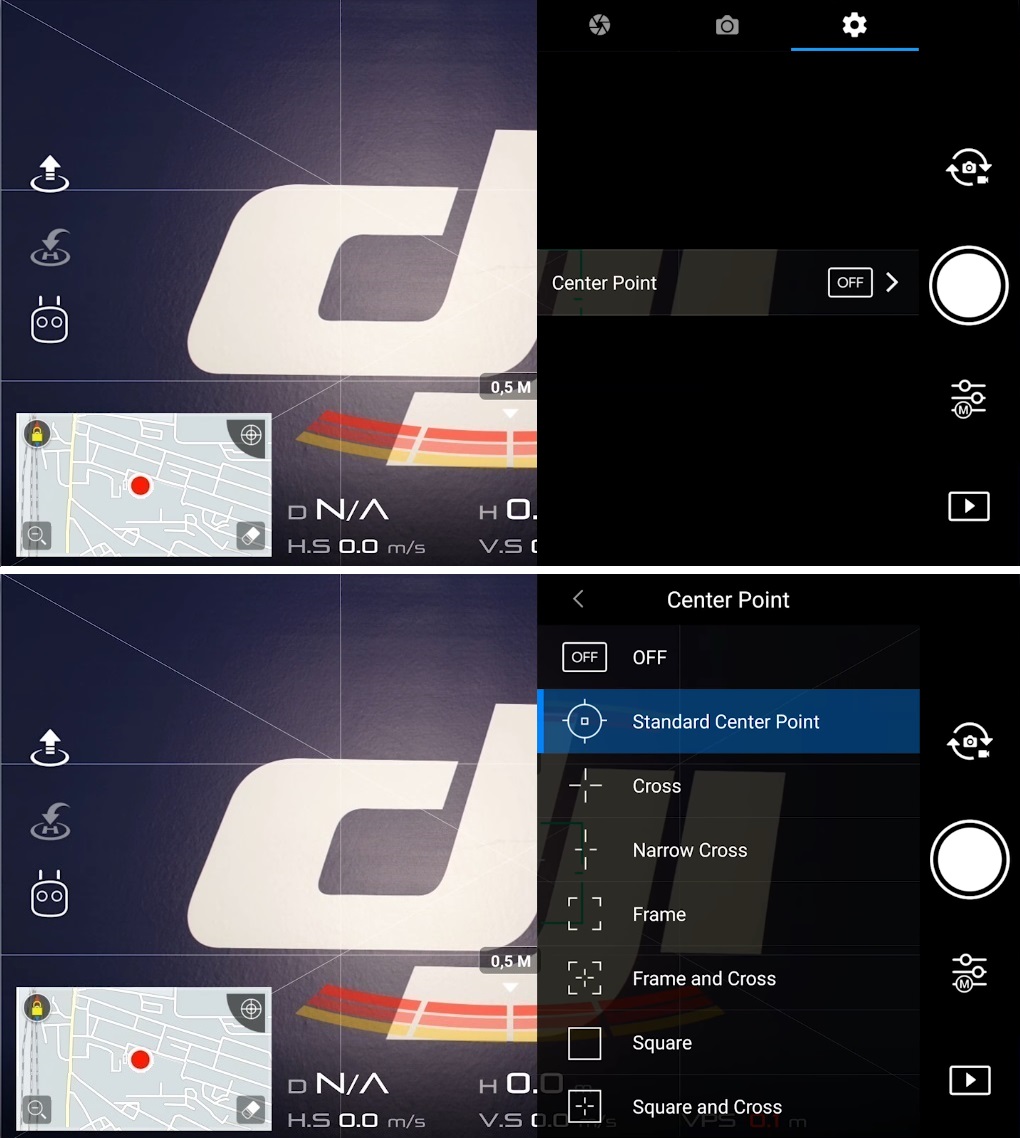
مرکز نقطه
مرکز نقطه - به شما امکان می دهد نمای نقطه مرکزی را که مرکز صفحه را مشخص می کند تغییر دهید ، همچنین رنگ آن را تغییر دهید یا آن را به طور کلی خاموش کنید.
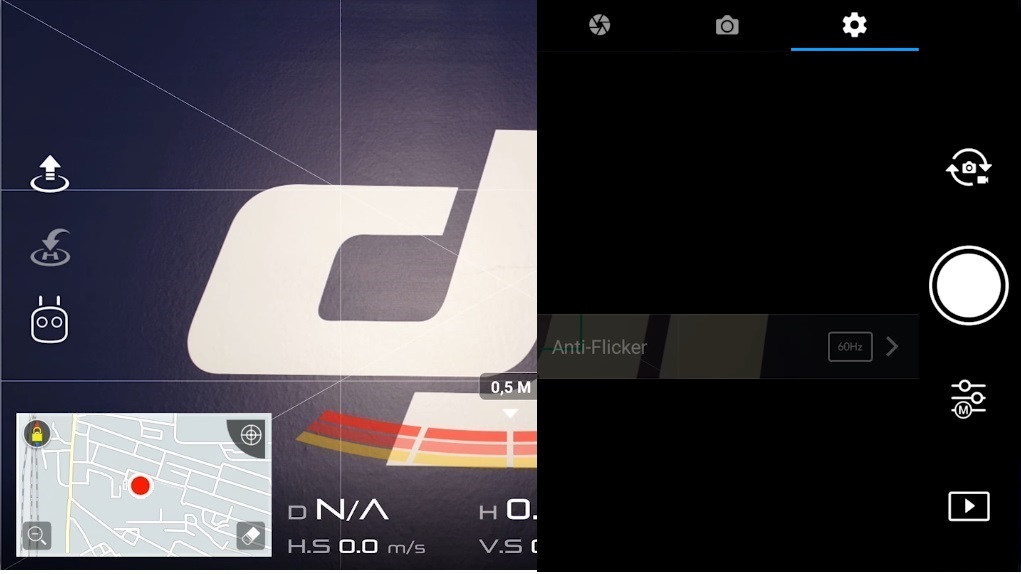
ضد سوسو زدن
ضد سوسو زدن-این پارامتر هنگام عکاسی در شرایط نور مصنوعی ، سوسو را حذف می کند و باید با فرکانس پخش مطابقت داشته باشد کشوری که در آن ویدیوی ضبط شده را نمایش می دهید (NSTC = 60Hz یا PAL = 50Hz). ممکن است فعال نباشد ، زیرا این عملکرد با تنظیماتی که در آن سیستم نمایشگر PAL / NTSC انتخاب شده است انجام می شود
آستانه تمرکز قله
آستانه تمرکز قله - این گزینه قله های فوکوس را فعال می کند (به صورت حاشیه قرمز نمایش داده می شود) که برجسته خواهد شد موضوع در فوکوس است ، و همچنین به شما امکان می دهد حساسیت آنها را انتخاب کنید.
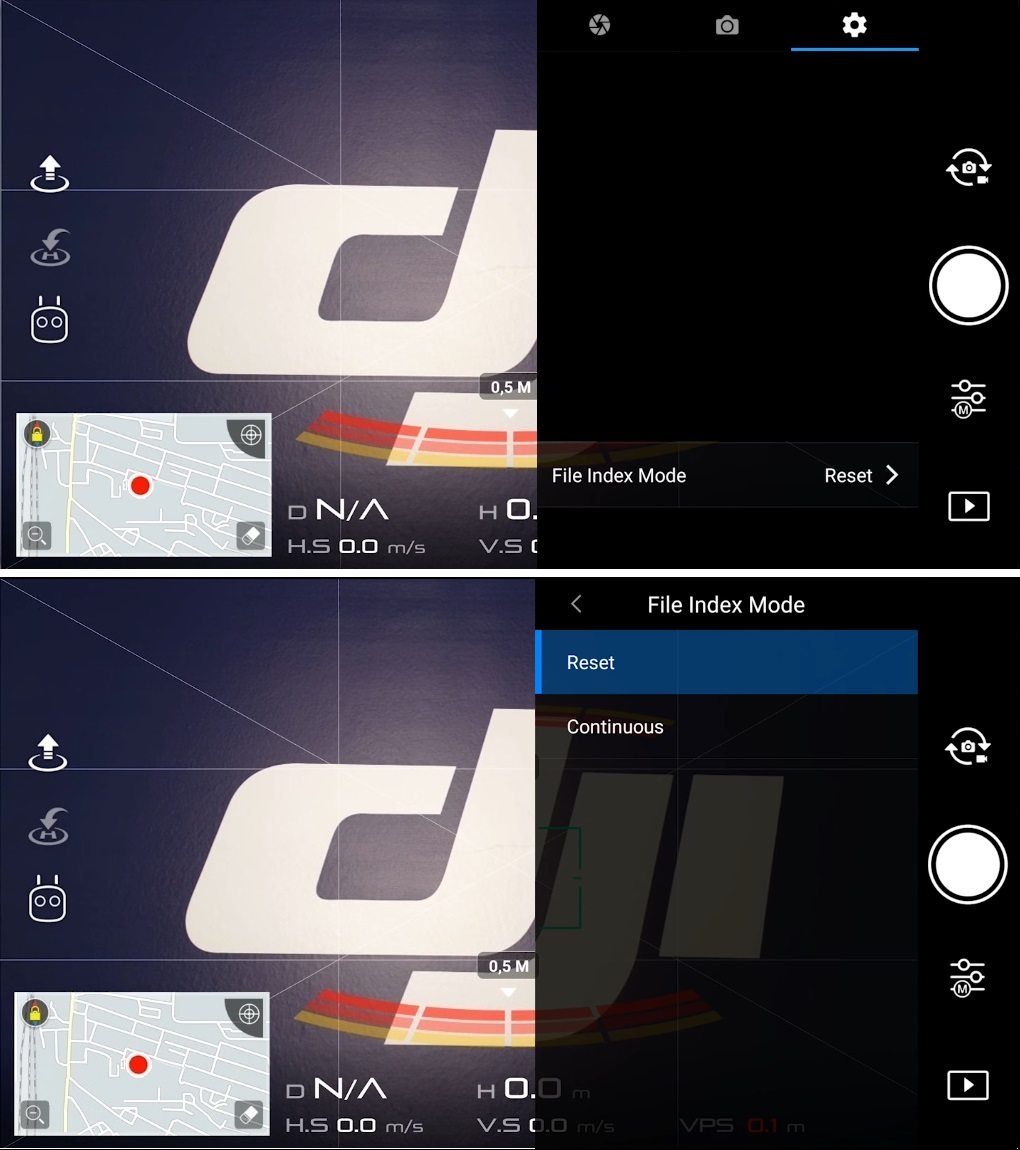
حالت فهرست فایل
حالت فهرست فایل - این گزینه نحوه شماره گذاری پرونده ها در کارت حافظه استفاده شده را تعیین می کند. دو حالت در دسترس است:
- بازنشانی - مربوط به این است که بخواهید کارت حافظه پس از قالب بندی / جایگزینی از 1 شروع به خواندن تصاویر کند.
- پیوسته - مرتبط است اگر می خواهید شماره به طور نامحدود ادامه یابد ، حتی اگر کارت حافظه جدیدی را وارد کرده باشید. اگر می خواهید تصاویر مربوط به یک پروژه خاص را ردیابی کنید ، می تواند مفید باشد.
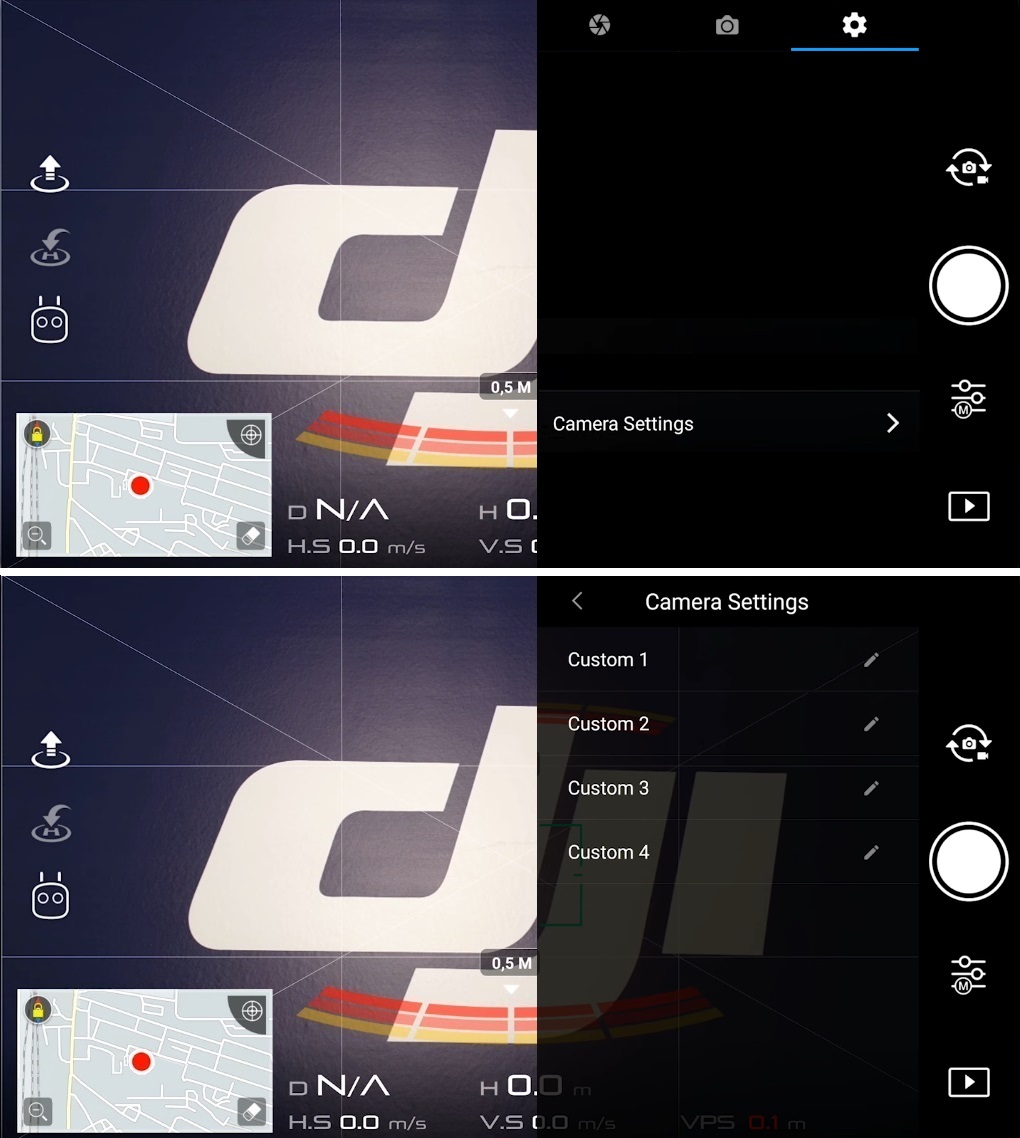
تنظیمات دوربین
تنظیمات دوربین - این گزینه به شما امکان می دهد از پیش تنظیمات جداگانه با تنظیمات مختلف دوربین ایجاد کرده و بین آنها به میزان لازم... حداکثر 4 ایستگاه از پیش تنظیم می تواند ایجاد شود.
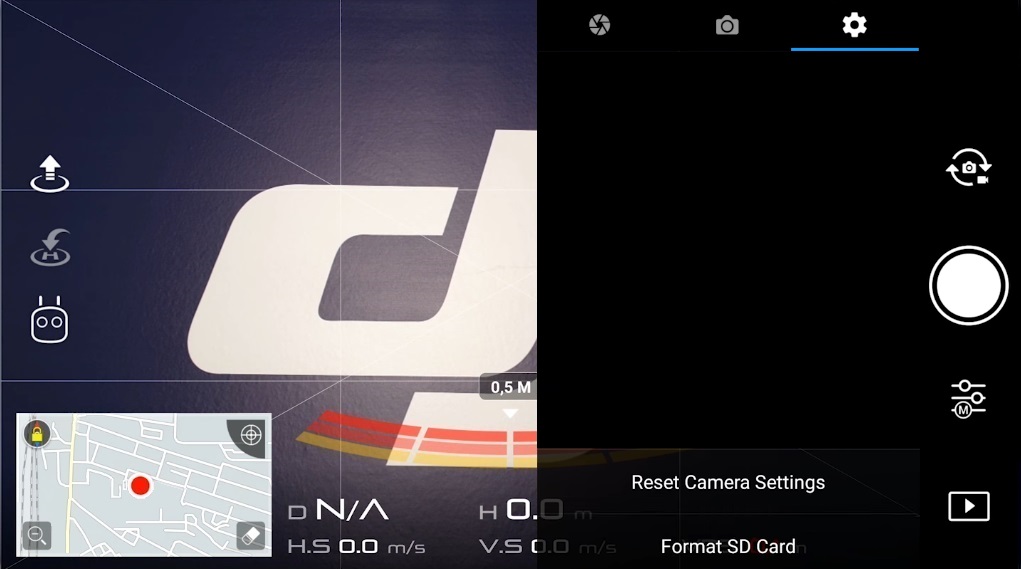
بازنشانی تنظیمات دوربین
بازنشانی تنظیمات دوربین - این گزینه به شما امکان می دهد تنظیمات فعلی دوربین را به حالت پیش فرض کارخانه بازگردانید.
قالب بندی کارت SD
قالب بندی کارت SD - این گزینه به شما امکان می دهد کارت SD را قالب بندی کنید.
سمت چپ صفحه اصلی پرواز
سمت چپ صفحه اصلی - در اینجا دکمه های مجازی مسئول بلند شدن / فرود خودکار و بازگشت خودکار و همچنین دکمه ای که دسترسی به منوی حالت های پرواز و عکسبرداری هوشمند را فراهم می کند. جزئیات بیشتر در مورد هر دکمه و منو.
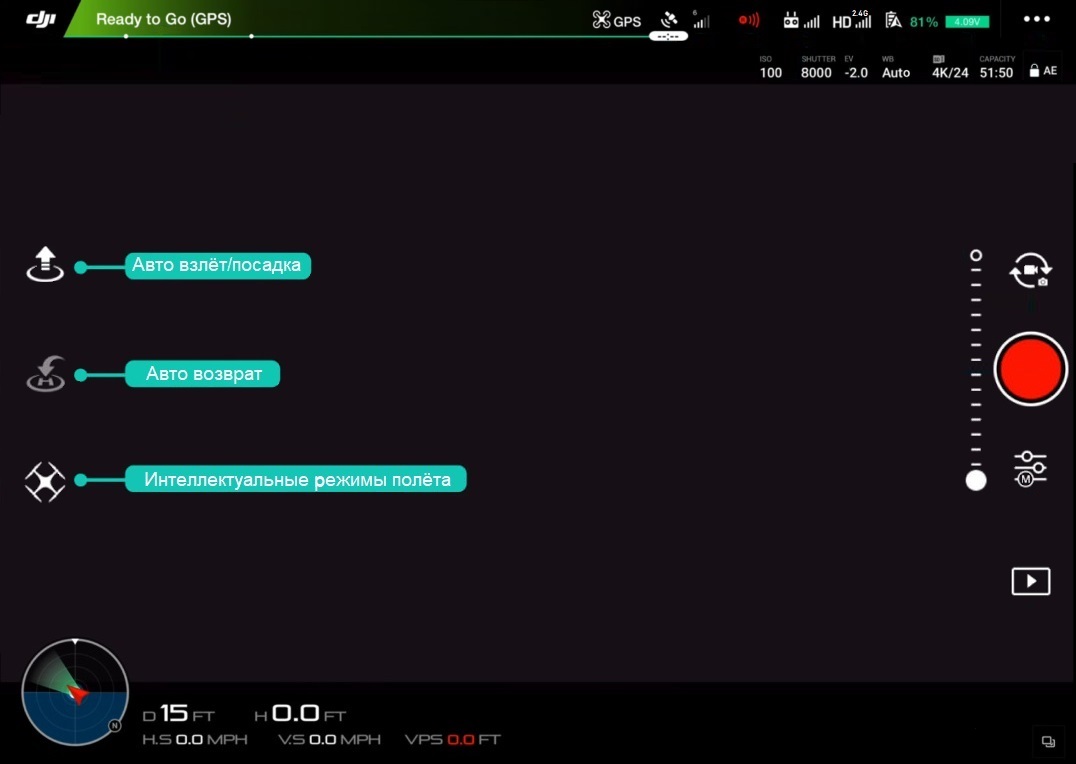
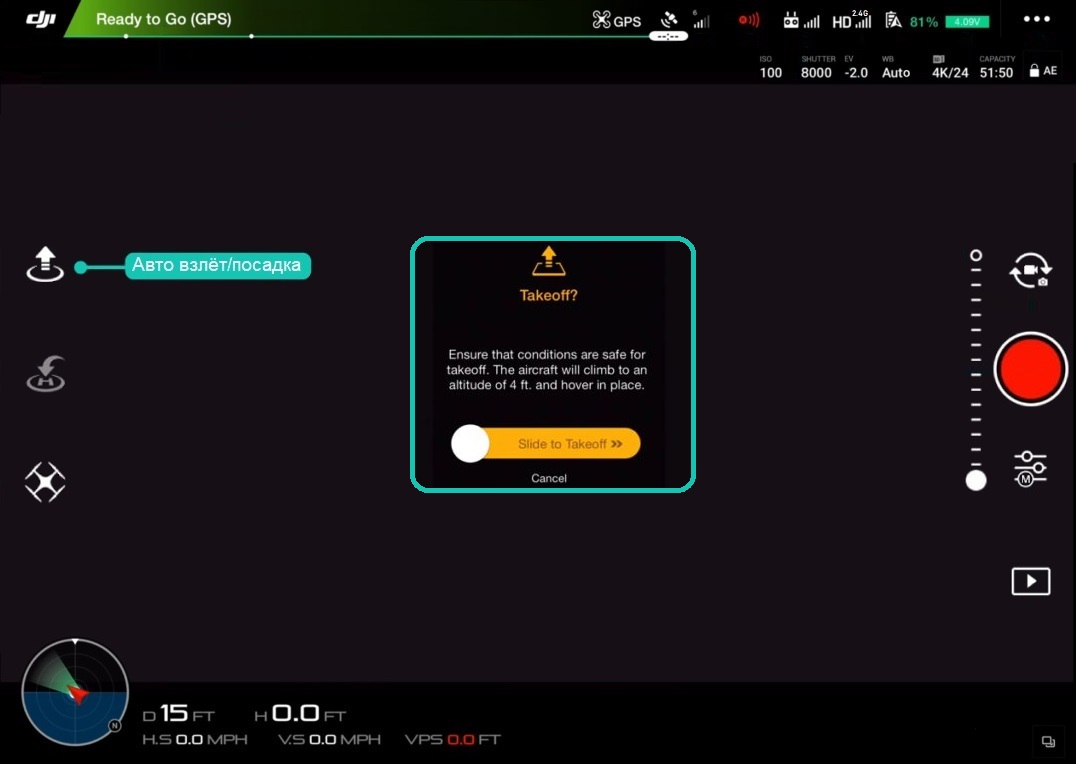
تیک آف خودکار
تیک آف خودکار - این دکمه مجازی بطور خودکار هواپیمای شما را 1.2 متر راه می اندازد بالا ، جایی که معلق است با ضربه زدن روی نماد "برخاست خودکار" ، یک نوار لغزنده زرد رنگ در مرکز صفحه ظاهر می شود که به عنوان نوعی محافظ در برابر پرتاب تصادفی عمل می کند.
اطلاعات بالای نوار لغزنده به کاربر هشدار می دهد که مطمئن شود شرایط در محل پرتاب به پهپاد اجازه می دهد تا ارتفاع 1.2 متری قبل از بلند شدن بلند شود. برای بلند شدن ، لغزنده را از سمت چپ به راست حرکت دهید. اگر برخاست لازم نیست ، روی نماد "لغو" در زیر نوار لغزنده ضربه بزنید. برای فرود خودکار ، روی همان نماد ضربه بزنید.
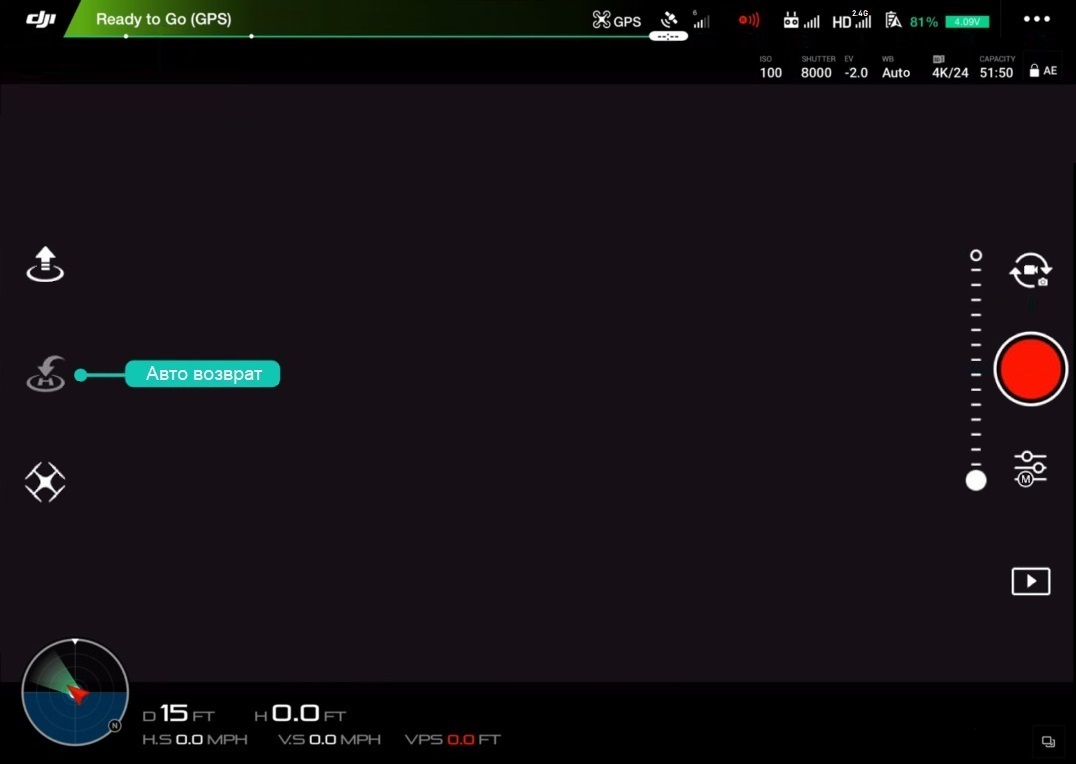
به خانه بروید
به خانه بروید - فعال شدن بازگشت خودکار به محل برخاستن با موارد بعدی فرود آمدن.
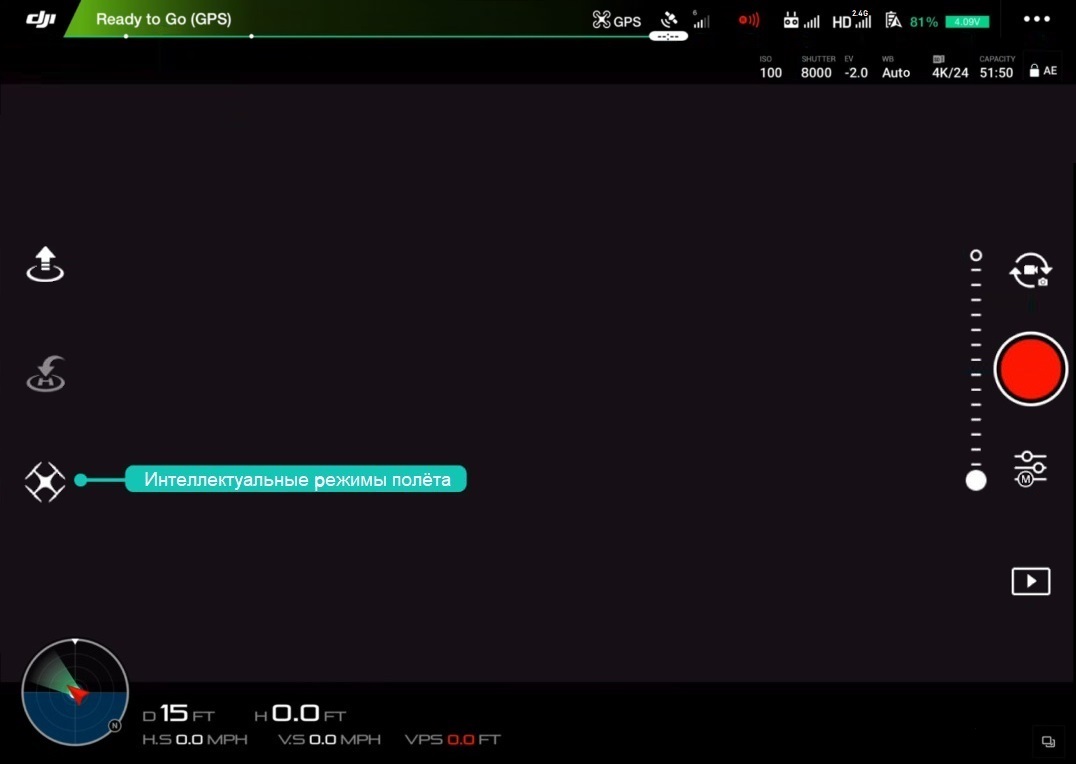
حالت های پرواز هوشمند
حالت های پرواز هوشمند - این منو دسترسی به حالت های پرواز و عکسبرداری هوشمند را فراهم می کند که انواع مختلفی از عملکردهای هوشمند را با استفاده از فناوری های هوش مصنوعی چشمگیر ارائه می دهد. لیست این حالت ها به طور مداوم به روز می شود ، بنابراین فقط چند مورد از آنها در زیر شرح داده می شود.
و همچنین در اینجا می توانید حالت مبتدی را فعال یا غیرفعال کنید ، که به دلایل ایمنی ارتفاع ، فاصله ، سرعت پرواز را محدود می کند و بسیاری از عملکردهای پیشرفته هواپیماهای بدون سرنشین را غیرفعال می کند. جزئیات بیشتر در مورد هر حالت.
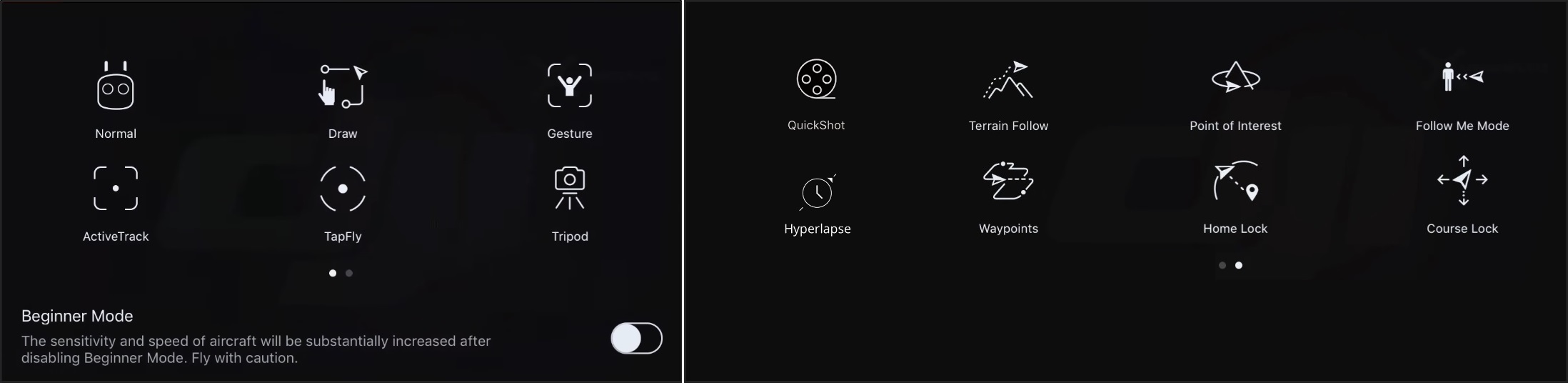
معمولی
عادی - برای تغییر حالت های پرواز هوشمند به حالت دستی معمولی عمل می کند با استفاده از کنترل پنل

آهنگ فعال
مسیر فعال - در این حالت هوشمند ، هواپیمای بدون سرنشین به طور خودکار اشیایی مانند افراد ، دوچرخه ، اتومبیل را تشخیص می دهد یا قایق ها و سپس آنها را دنبال می کند. این می تواند مفید باشد ، به عنوان مثال ، هنگامی که شما نیاز دارید فقط بر کنترل دوربین و عدم هدایت پهپاد تمرکز کنید.
- به عنوان یک قاعده ، چندین گزینه دارد (برای همه مدلها در دسترس نیست): ردیابی (دنبال یک شیء) / نمایه (دنبال یک شیء) / کانون توجه (تحت کنترل با دوربین ثابت بر روی شی).
- هنگام استفاده از حالت باید احتیاط کرد زیرا ممکن است سیستم تشخیص و اجتناب از موانع در دسترس نباشد یا در همه جهات کار نکند.

قرعه کشی
قرعه کشی - در این حالت ، هواپیمای بدون سرنشین مسیر ترسیم شده روی صفحه تلفن هوشمند / تبلت جفت شده را دنبال می کند ، در نتیجه به خلبان اجازه می دهد تمرکز بر تیراندازی
- به عنوان یک قاعده ، دو گزینه دارد: رو به جلو (دور با دور کوتاه به چپ و راست محدود می شود) / رایگان (بدون محدودیت در حرکت از دوربین)
- هنگام استفاده از حالت احتیاط لازم است زیرا سیستم تشخیص و اجتناب از موانع فعال نیست.
روی Fly Fly
ضربه بزنید پرواز کنید - در این حالت ، تنها کاری که باید انجام دهید این است که یک نقطه روی صفحه تلفن هوشمند / رایانه لوحی جفت شده با یک ضربه بزنید ، و هواپیمای بدون سرنشین به طور خودکار به سمت او پرواز می کند ، که به کاربر اجازه می دهد تنها بر کنترل دوربین تمرکز کند.
- به عنوان یک قاعده ، چندین گزینه دارد (برای همه مدل ها موجود نیست): جلو (پرواز به نقطه ای در جهت کاملا جلو با قابلیت تغییر ارتفاع و سرعت) / عقب (پرواز به نقطه ای دقیقاً در جهت جلو به عقب با قابلیت تغییر ارتفاع و سرعت) / رایگان (پرواز به نقطه ای با قابلیت چرخاندن پهپاد به چپ و راست و تنظیم ارتفاع و سرعت) / مختصات (پرواز به نقطه ای به شدت در ارتفاع اشغالی با قابلیت تغییر سرعت)...
- هنگام استفاده از حالت باید احتیاط کرد ، زیرا در برخی از نسخه ها سیستم تشخیص و اجتناب از موانع فعال نیست.

ژست
ژست - پهپاد را با استفاده از حرکات دست کنترل کنید. اگر هواپیمای بدون سرنشین شما از آن پشتیبانی می کند ، به فهرست راهنمای کاربر (یا نظرات ما ) مراجعه کنید تا لیستی از حرکات موجود را مشاهده کنید.

سه پایه
سه پایه - این حالت حساسیت سیستم کنترل را به میزان قابل توجهی کاهش می دهد ، حرکات هواپیمای بدون سرنشین بسیار کند خواهد بود به
برای استفاده در هنگام خلبانی در مکانهای محدود / دور از دسترس مناسب است ، در نتیجه به شما این امکان را می دهد که به خلبانی دقیق تر / ایمن تری دست یابید و در عین حال فیلم های صاف سطح حرفه ای را بگیرید. برای این حالت ، حداکثر حالت های عکسبرداری و فیلم در دسترس است.

QuickShot
QuickShot - حالت های از پیش تعیین شده پرواز و عکسبرداری که به شما امکان می دهد کلیپ های کوتاه سینمایی را با یک ضربه سریع متوجه شوید.به عنوان یک قاعده ، 7 سناریوی احتمالی پرواز خودکار و عکسبرداری در قالب سلفی در دسترس است (هر مدل دارای حالتهای خاص خود است): Dronie / Circle / Helix / موشک / بومرنگ / سیارک / دالی زوم
Hyperlapse
Hyperlapse - پروازهای از پیش تعیین شده و حالت های ضبط که به شما امکان می دهد با هیپرلیپ ها ویدئویی خیره کننده ایجاد کنید. به عنوان یک قاعده ، 4 سناریوی احتمالی پرواز خودکار و عکسبرداری در حالت Hyperlapse در دسترس است (برای همه مدلها در دسترس نیست): رایگان / Circle / CourseLock / نقطه راه.
Terrain Follow
Terrain Follow - در صورت فعال بودن ، هواپیمای بدون سرنشین جسم را دنبال می کند و به طور خودکار ارتفاع خود را در صعودها و فرودها تنظیم می کند زمین وقتی مثلاً بخواهید خود را در حال صعود از کوه یا بالای یک سازه ببینید ، مربوط خواهد بود.

نقطه مورد علاقه
نقطه مورد علاقه - در اینجا می توانید یک ساختمان ، شی یا مکان خاصی را روی صفحه نمایش علامت گذاری کنید تلفن هوشمند / رایانه لوحی به عنوان یک نقطه مورد توجه قرار می گیرد و هواپیمای بدون سرنشین دائماً دور آن می چرخد / می چرخد.

نقاط راه
نقاط راه - در این حالت می توانید چندین نقطه GPS را روی صفحه تلفن هوشمند / رایانه لوحی جفت شده تنظیم کنید.) و پهپاد به طور خودکار بر فراز آنها پرواز می کند و به شما امکان می دهد بر کنترل دوربین تمرکز کنید.

حالت من را دنبال کنید
حالت من را دنبال کنید - در این حالت هواپیما به طور خودکار شما را دنبال می کند.

Home Lock
Home Lock - این حالت چوب کنترل هواپیمای بدون سرنشین را متصل می کند (مسئول حرکت پهپاد به جلو / عقب / چپ / راست) به نقطه برخاست. در این صورت ، اگر چوب را به سمت خود بکشید ، هواپیمای بدون سرنشین به عقب پرواز می کند ، دقیقاً به نقطه برخاست ، و اگر از خودتان ، سپس از نقطه برخاست ، بدون توجه به جهت آن ، به جلو حرکت می کند. به عنوان مثال ، اگر دید هواپیمای بدون سرنشین خود را از دست داده اید و می خواهید آن را به خود نزدیک کنید ، بسیار مناسب است.

قفل کورس
قفل دوره - در این حالت ، هواپیمای بدون سرنشین فقط در یک خط مستقیم (یا سرنشین) پرواز می کند ، حتی اگر جهت بینی (قسمت جلوی هواپیمای بدون سرنشین) در جهت دیگر باشد. وقتی Course Lock را فعال می کنید ، کنترل ها نسبت به مسیر فعلی هواپیمای بدون سرنشین شما تنظیم می شوند. این ناوبری ساده به شما امکان می دهد تا پهپاد را در خطوط مستقیم هنگام کنترل دوربین کنترل کنید.

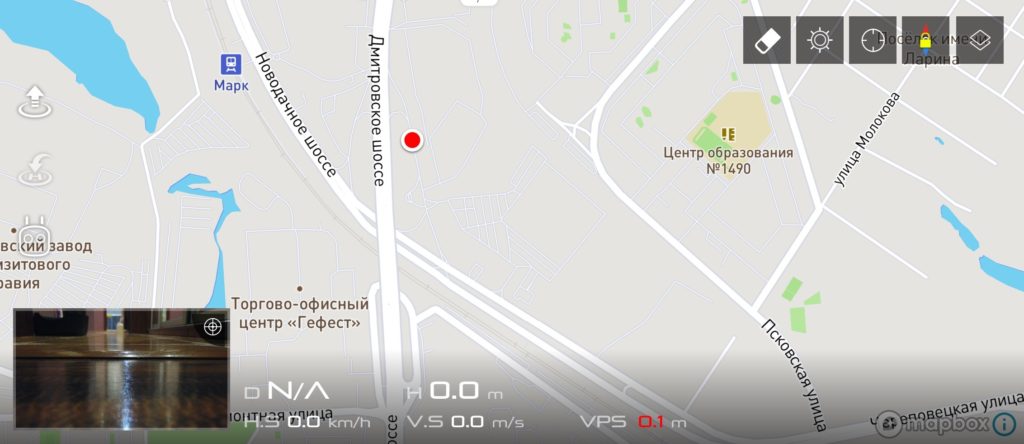
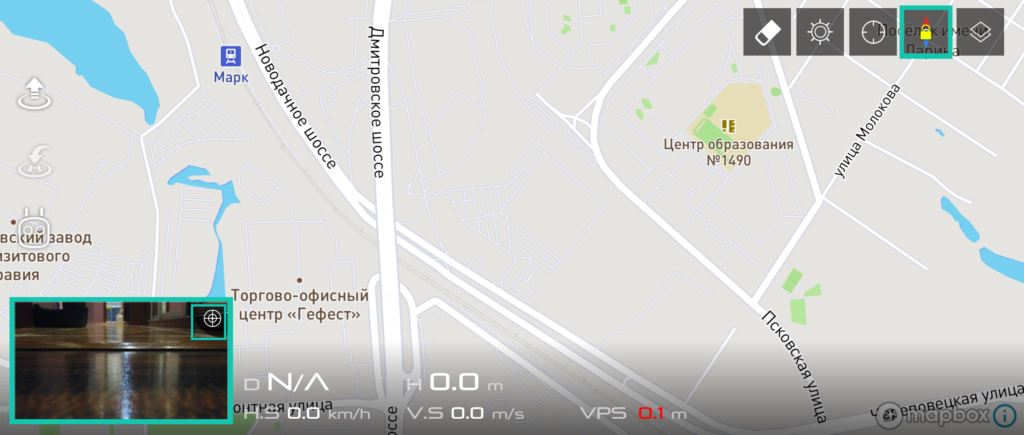
نقشه
روی پنجره مربع در سمت چپ پایین صفحه اصلی پرواز ضربه بزنید تا کلید را عوض کنید نقشه به حالت تمام صفحه در این حالت ، تصویر دوربین بدون سرنشین به یک پنجره مربع منتقل می شود و در گوشه سمت چپ پایین صفحه اصلی قرار می گیرد.برای تغییر حالت اول شخص ، روی پنجره گوشه سمت چپ پایین صفحه اصلی ضربه بزنید. در حالت نقشه با اندازه کامل ، تنظیمات زیر در گوشه سمت راست بالا موجود است:
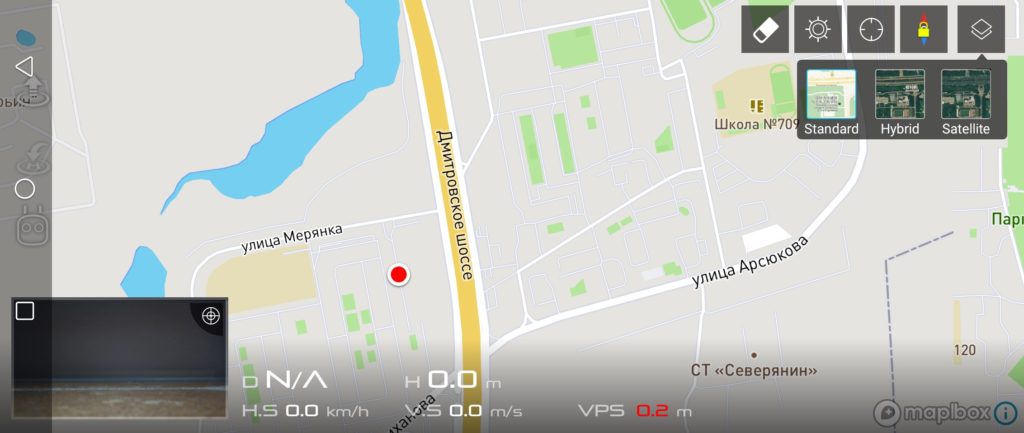
حالت های نمایش نقشه
سه گزینه نمایش نقشه موجود است:
- استاندارد = یک نقشه گویا با نام خیابانها ، بزرگراهها و غیره نمایش می دهد.
- ترکیبی = ترکیبی از دو نقشه - نمایشی با نام خیابان ها و بزرگراه ها ، که روی آنها تصویر ماهواره ای قرار می گیرد ، نمایش داده می شود.
- Satellite = نقشه را به صورت تصاویر ماهواره ای بدون نام خیابان ها ، بزرگراه ها و غیره نمایش می دهد.
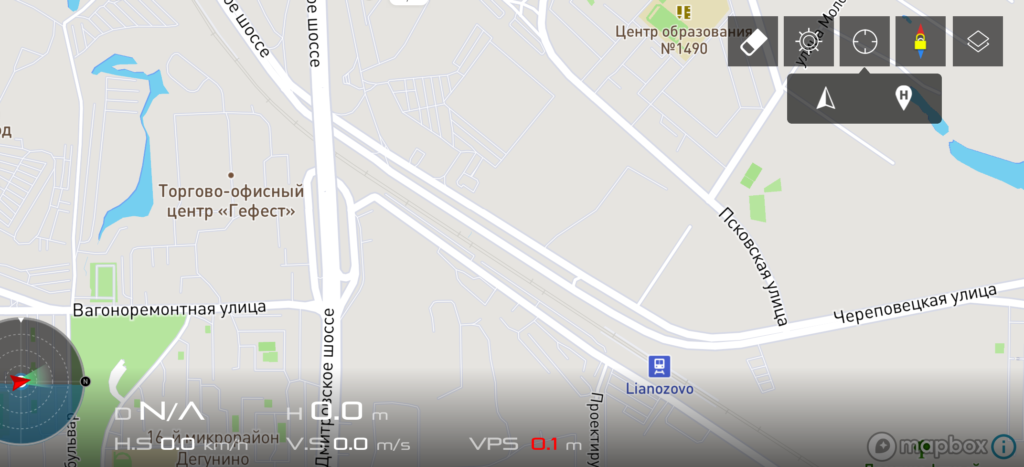
قطب نما
قطب نما - ضربه زدن روی آن نقشه را جهت می دهد به طوری که شمال ”به سمت بالا هدایت شد. همچنین گوشه سمت راست بالای پنجره در سمت چپ پایین را مشاهده کنید که نمای اول شخص را نمایش می دهد. با ضربه زدن روی نماد متقاطع مو ، می توانید این پنجره را به حالت قطب نما تغییر دهید و دوباره به حالت FPV برگردید. این حالت نشان می دهد که هواپیمای بدون سرنشین در حال حرکت به سمت شمال است و بنابراین می تواند به شما در کنترل کنترل کمک کند.
نقشه مرکز
نقشه مرکز - با ضربه زدن روی آن ، می توانید نقشه را هر دو نسبی مرکز کنید به محل برخاست (
) و نسبت به مکان فعلی هواپیمای بدون سرنشین خود (
).
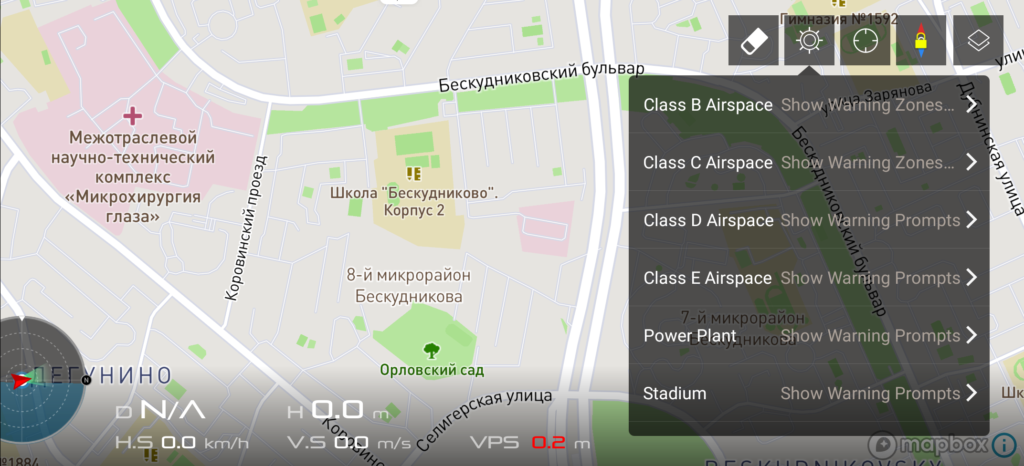
NFZ
No Fly Zone - منو به شما امکان می دهد مناطق موجود در نقشه را روی نقشه نمایش دهید که پرواز محدود یا کاملاً ممنوع است.
تله متری
تله متری یک پخش دو طرفه از داده های پرواز است که بر روی صفحه نمایش منعکس می شود. یک تلفن هوشمند / کنترل از راه دور...
- D = فاصله کنونی هواپیما تا کنترل کننده.
- H = ارتفاع فعلی نسبت به نقطه برخاست.
- H. S. = سرعت پرواز افقی هواپیمای بدون سرنشین.
- V. S. = سرعت عمودی هواپیمای بدون سرنشین ، که خلبان را از سرعت یا سرعت بالا یا پایین آمدن خود مطلع می کند.
- VPS = فاصله تا سطح زمین که توسط سیستم حسگر پایین هواپیما تعیین شده است. این اطلاعات به ویژه هنگامی که موقعیت یابی ماهواره ای وجود ندارد ، مناسب است.

نتیجه گیری
ما فکر می کنیم این طولانی ترین بررسی ما بود. امیدواریم این اطلاعات برای شما واضح و مفید بوده باشد ، پس از خواندن آنها با اطمینان و به طور کامل از پتانسیل کامل پهپادهای DJI استفاده خواهید کرد. اگر چیزی را از دست دادیم یا نیاز به توضیح بیشتر در مورد چیزی داریم ، لطفاً نظر خود را در زیر بنویسید و ما سعی خواهیم کرد به شما کمک کنیم. با تشکر از توجه شما.
.






