Περιεχόμενα
- DIY drone: Μάθημα 1. Ορολογία.
- Drone Do-it-yourself: Μάθημα 2. Πλαίσια.
- Κηφήνας μόνος σου: Μάθημα 3. Μονάδα παραγωγής ενέργειας.
- Κηφήνας μόνος σου: Μάθημα 4. Ελεγκτής πτήσης.
- Μη επανδρωμένο drone: Μάθημα 5. Συναρμολόγηση.
- Μη αυτόματο drone: Μάθημα 6. Έλεγχος απόδοσης.
- Κηφήνας μόνος σου: Μάθημα 7. FPV και απόσταση.
- Κηφήνας με τα χέρια σας: Μάθημα 8. Αεροπλάνα.
Εισαγωγή
Στο Μάθημα 5, έπρεπε να ολοκληρώσετε τη συναρμολόγηση του drone (χωρίς να εγκαταστήσετε έλικες). Πάρτε το χρόνο σας, καθώς ακόμη και μικρά λάθη μπορούν να οδηγήσουν σε συντριβή. Έχετε ακόμα μερικά βήματα πριν από την πρώτη σας πτήση, οπότε κάντε υπομονή και ακολουθήστε τις παρακάτω οδηγίες. Όπως και στο προηγούμενο μάθημα, θα συνεχίσουμε να υποθέτουμε ότι χρησιμοποιείτε εξοπλισμό ραδιοελέγχου για να αλληλεπιδράσετε με το UAV (ως η πιο διαδεδομένη μέθοδος ελέγχου αυτή τη στιγμή).
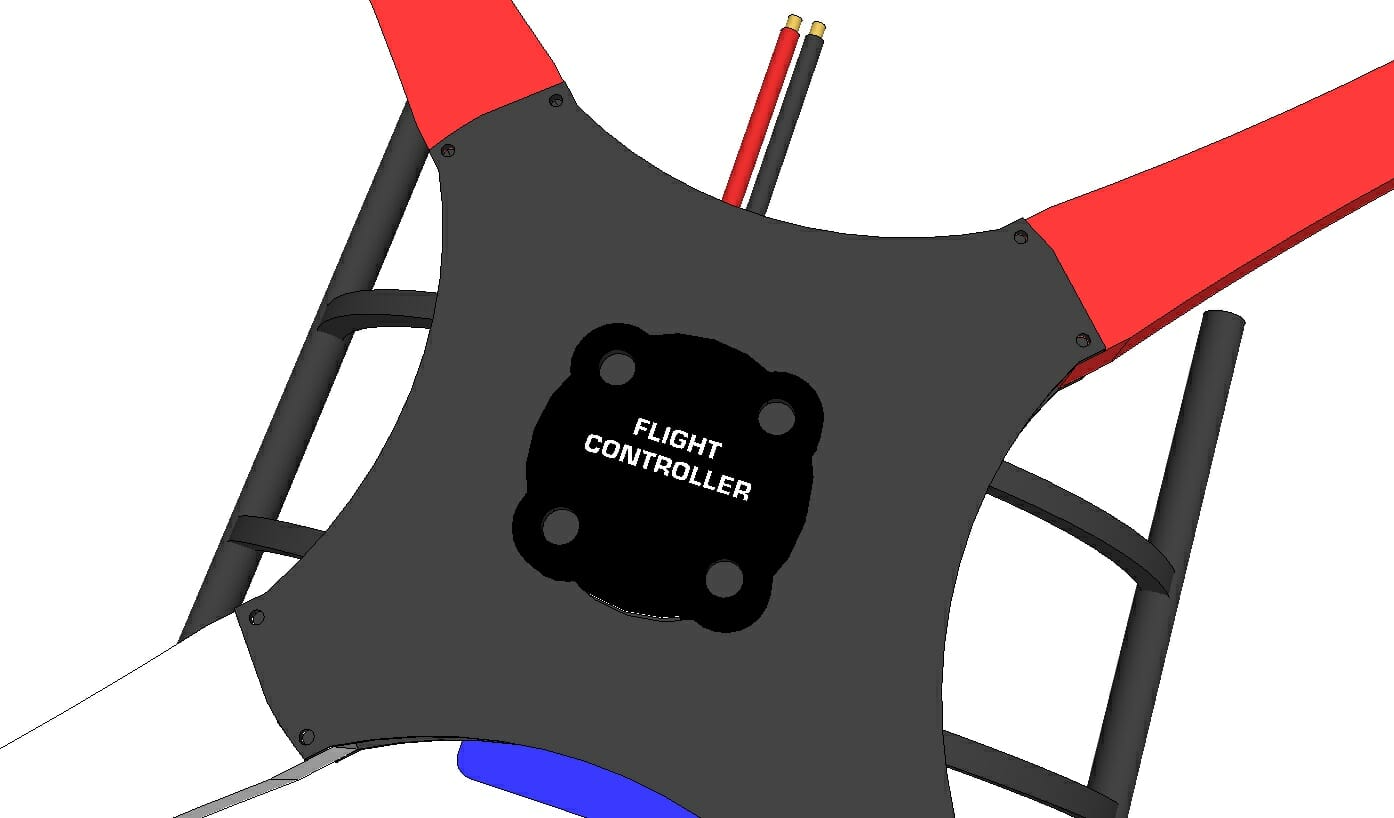
Flight Controller
- Δεν είναι όλοι οι ελεγκτές πτήσης ίδιοι, επομένως η διαδικασία εγκατάστασης εξαρτάται πραγματικά από το μοντέλο που θα επιλέξετε. Εάν δεν το έχετε κάνει ήδη, αφιερώστε χρόνο για να διαβάσετε προσεκτικά το εγχειρίδιο χρήστη του επιλεγμένου ελεγκτή πτήσης από την αρχή μέχρι το τέλος. Η παράλειψη της παραμικρής λεπτομέρειας μπορεί να κάνει τη διαφορά μεταξύ μιας πρώτης επιτυχημένης πτήσης και μιας πλήρους διαγραφής. Ένα καλά γραμμένο εγχειρίδιο χρήστη θα πρέπει να περιλαμβάνει όλα όσα βρίσκετε σε αυτήν τη σελίδα και άλλα, επομένως συνιστάται να χρησιμοποιήσετε αυτό το σεμινάριο ως λίστα ελέγχου και όχι ως αντικατάσταση / εναλλακτική λύση στις βασικές οδηγίες προγραμματιστή.
- Οι περισσότεροι ελεγκτές πτήσης παρέχουν μια βήμα προς βήμα διαδικασία για την επιλογή ρυθμίσεων για μια συγκεκριμένη διαμόρφωση UAV, συμπεριλαμβανομένου του πλήρους ελέγχου των τιμών PID. Οι τιμές για κάθε μία (P, I και D) μπορούν να προσαρμοστούν για το συγκεκριμένο πλαίσιο και το στυλ πτήσης. από κάτι πιο σταθερό για τη χρήση της πλατφόρμας στην αεροφωτογραφία, μέχρι κάτι πιο παρόμοιο με τις αθλητικές πτήσεις (εκτέλεση αυτόματων επιθέσεων, αγώνες με drone, κ.λπ.). Συνήθως ξεκινά με τις προεπιλεγμένες τιμές για κάθε πεδίο και αν δεν έχετε αρκετή εμπειρία για να τις αλλάξετε, συνιστάται να αφήσετε τα πάντα ως έχουν μέχρι την πρώτη πτήση.
- Το εγχειρίδιο του ελεγκτή πτήσης πρέπει επίσης να υποδεικνύει τον τρόπο ρύθμισης των ελάχιστων στροφών ανά λεπτό του σταθμού παραγωγής ηλεκτρικής ενέργειας, δηλαδή να ορίζει την ταχύτητα με την οποία περιστρέφονται οι κινητήρες όταν φορτώνονται. Αρχικά, μπορείτε να ορίσετε αυτήν την τιμή σχετικά χαμηλά - αρκετά για να δείτε τους κινητήρες να περιστρέφονται, αλλά όχι τόσο ώστε τα UAV να κινούνται από την ώθηση που παράγουν. Η μέγιστη ώθηση, αν μπορείτε να ορίσετε αυτήν την τιμή, θα πρέπει να αντιστοιχεί στη μέγιστη τιμή που μπορεί να παρέχει το μπαστούνι γκαζιού του εργαλείου ελέγχου σας.
- Μια πτυχή που μπορεί να συζητηθεί στο εγχειρίδιο χρήστη του ελεγκτή πτήσης χωρίς να υποβληθούν προτάσεις είναι η λειτουργία πτήσης. Επιστρέφοντας στο Μάθημα 4, το “Flight Mode” καθορίζει ποιοι αισθητήρες χρησιμοποιούνται για τη σταθεροποίηση του drone, καθώς και τη λειτουργία / σκοπό του. Οι πιο συνηθισμένοι αισθητήρες που βρίσκονται σε ένα χειριστήριο πτήσης είναι το γυροσκόπιο, το επιταχυνσιόμετρο, το βαρόμετρο, η πυξίδα και πιθανώς το GPS.
- Εάν αυτό είναι το πρώτο σας drone, συνιστάται ιδιαίτερα να έχετε τον πιο σταθερό τρόπο πτήσης διαθέσιμο στον ελεγκτή πτήσης σας, ο οποίος χρησιμοποιεί τους περισσότερους διαθέσιμους αισθητήρες για τη σταθεροποίηση του drone. Σε γενικές γραμμές, αυτό συμβαίνει επειδή οι ρυθμίσεις του ελεγκτή PID μπορεί να είναι πολύ μακριά από το πλαίσιο / τις ρυθμίσεις σας, γι 'αυτό είναι καλύτερο να επιλέξετε τις προεπιλεγμένες τιμές του ελεγκτή PID. Εάν έχετε πετάξει στο παρελθόν, η λειτουργία ACRO (η οποία χρησιμοποιεί μόνο το γυροσκόπιο) μπορεί να είναι η καλύτερη.
- Οι περισσότεροι ελεγκτές πτήσης θα σας επιτρέψουν επίσης να αλλάξετε τη «λειτουργία πτήσης» κατά την πτήση μέσω εφεδρικού καναλιού. Για παράδειγμα, εάν το τηλεχειριστήριό σας έχει έξι κανάλια, μπορείτε να αναθέσετε την εκχώρηση καναλιού 5 ή 6 (τα οποία συχνά σχετίζονται με διακόπτες), ώστε να μπορείτε να αλλάξετε τη λειτουργία πτήσης ενώ πετάτε με το drone. Πριν πετάξετε, βεβαιωθείτε ότι γνωρίζετε ποια θέση διακόπτη αντιστοιχεί σε ποια λειτουργία πτήσης.
- Αποθαρρύνεται έντονα η χρήση πτήσης hotspot GPS ή τυχόν πιο εξελιγμένων λειτουργιών / αισθητήρων (για παράδειγμα, ένας υπερηχητικός αισθητήρας απόστασης για τον προσδιορισμό της απόστασης στο έδαφος) μέχρι να είστε σίγουροι ότι το UAV είναι καλά συντονισμένο. Ορισμένα εγχειρίδια προτείνουν να χρησιμοποιείτε μόνο τη λειτουργία ACRO (ακροβατική), ωστόσο, εάν δεν έχετε σημαντική πτητική εμπειρία, η πτήση σε αυτήν τη λειτουργία δεν θα είναι φυσικά εφικτή για εσάς, η λειτουργία είναι η πιο δύσκολη στον έλεγχο, αφού αποκλείεται η σταθεροποίηση.
Διαμόρφωση εξοπλισμού ελέγχου
- Ορισμένες κονσόλες έχουν διαφορετικούς τρόπους λειτουργίας, όπως αεροπλάνο, ελικόπτερο, αυτοκίνητο κ.λπ. Στο 4 (Ενότητα: Έλεγχος) συζητήσαμε τα τέσσερα κύρια κανάλια ελέγχου: Throttle, Yaw, Pitch και Roll, τα οποία είναι συνήθως τιμές που σχετίζονται με αεροσκάφη ή ελικόπτερα. Εάν το εγχειρίδιο του ελεγκτή πτήσης δεν καθορίζει μια συγκεκριμένη λειτουργία για τον πομπό, συνιστάται η χρήση της λειτουργίας αεροπλάνου.
- Υπάρχουν δύο τύποι τηλεχειριστηρίου: Λειτουργία 1 (Λειτουργία 1) και Λειτουργία 2 (Λειτουργία 2). Ο τρόπος 2 (πιο συνηθισμένος) με αυτόν τον τύπο ελέγχου είναι το Throttle and Yaw που σχετίζεται με το αριστερό κανάλι / μπαστούνι / joystick, Pitch and Roll με το δεξί. Μπορείτε επίσης να ελέγξετε ξανά την εκχώρησή τους μετακινώντας τα ραβδιά απευθείας για να βεβαιωθείτε ότι οι τιμές δεν είναι ανεστραμμένες.
- Οι λειτουργίες πομπού συχνά προσθέτουν επίπεδα "offset" καναλιού / σήματος για να καταστήσουν την κίνηση πιο κατάλληλη για ένα συγκεκριμένο σύστημα, ωστόσο οι περισσότεροι ελεγκτές πτήσης ενδιαφέρονται για οποιαδήποτε μετατόπιση και, ως εκ τούτου, προτιμούν τις "ακατέργαστες" τιμές. Εάν ο πομπός σας δεν έχει λειτουργίες, απλώς ελέγξτε ποιο κανάλι / μπαστούνι / joystick είναι υπεύθυνο για ποια.
- Ένας πομπός RC γενικής χρήσης μπορεί να παρέχει μόνο ένα περιορισμένο εύρος σημάτων σε κάθε κανάλι, και ως εκ τούτου σε αυτό το μάθημα σας συμβουλεύουμε να μάθετε τι εύρος τιμών μπορεί να παρέχει ένας πομπός RC και εάν το ελάχιστο και οι μέγιστες τιμές μπορούν να προσαρμοστούν (ή ως τιμές ή ως ποσοστό του προεπιλεγμένου εύρους). Για παράδειγμα, οι ελεγκτές πτήσης που βασίζονται σε MultiWii απαιτούν πομπούς που μπορούν να παρέχουν ένα πλήρες φάσμα παλμών από 500ms έως 2500ms, ενώ η προεπιλεγμένη ρύθμιση μπορεί να είναι μόνο 1000ms έως 2000ms, καθώς αυτή είναι μια κοινή διαμόρφωση για αεροσκάφη R / C. Διαβάστε το εγχειρίδιο του πομπού για τον τρόπο ρύθμισης τελικών σημείων / εύρους σήματος (εάν υπάρχει).
- Εάν ο ελεγκτής σας διαθέτει οθόνη LCD, μπορείτε συχνά να το κάνετε μέσω της διεπαφής στην ενότητα "Ρυθμίσεις".
- «Δοκιμή εξοπλισμού ελέγχου στο μέγιστο. Η απόσταση "είναι πιο εύκολο να εφαρμοστεί με τη βοήθεια ενός φίλου / βοηθού ή να συνδέσετε ένα βομβητή ή άλλη οπτική / ηχητική ανατροφοδότηση στο drone RC. Ορισμένα μοντέλα υψηλότερου επιπέδου έχουν λειτουργία δοκιμής εύρους. Ο στόχος της δοκιμής είναι να δει πόσο μακριά ταξιδεύει το σήμα προτού ο δέκτης δεν μπορεί πλέον να το σηκώσει. Συνιστάται να χρησιμοποιείτε τη δοκιμή εμβέλειας μόνο μετά τη λεγόμενη "Πτήση μάχης" (Πτήση μάχης-το drone δοκιμάζεται για απόδοση σε μικρή απόσταση, εντός της οπτικής γωνίας του πιλότου-drone). Διαδικασία δοκιμής εμβέλειας:
- Ενεργοποιήστε τον εξοπλισμό ελέγχου και μετά το αεροσκάφος.
- Κάντε πίσω 15 μέτρα και ενεργοποιήστε το διακόπτη που σχετίζεται με το βομβητή. Πρέπει να τον ακούσεις.
- Εάν δεν έχετε βομβητή, ενεργοποιήστε το αεροσκάφος και βεβαιωθείτε ότι οι κινητήρες λειτουργούν.
- Αποσιωπήστε τον βομβητή / επανεπικοινωνήστε το drone
- Επαναλάβετε αυτά τα βήματα όλο και περισσότερο (οπτική επαφή) έως ότου το drone ανταποκριθεί στην εισαγωγή σας.
- Αυτή θα είναι η απόλυτη μέγιστη απόσταση που μπορείτε να πετάξετε με το drone σας.
- σως νομίζετε ότι δεν σκοπεύετε να το πετάξετε τόσο μακριά, αλλά να θυμάστε ότι το drone κινείται σε τρεις άξονες και κάτι μπορεί να πάει στραβά.
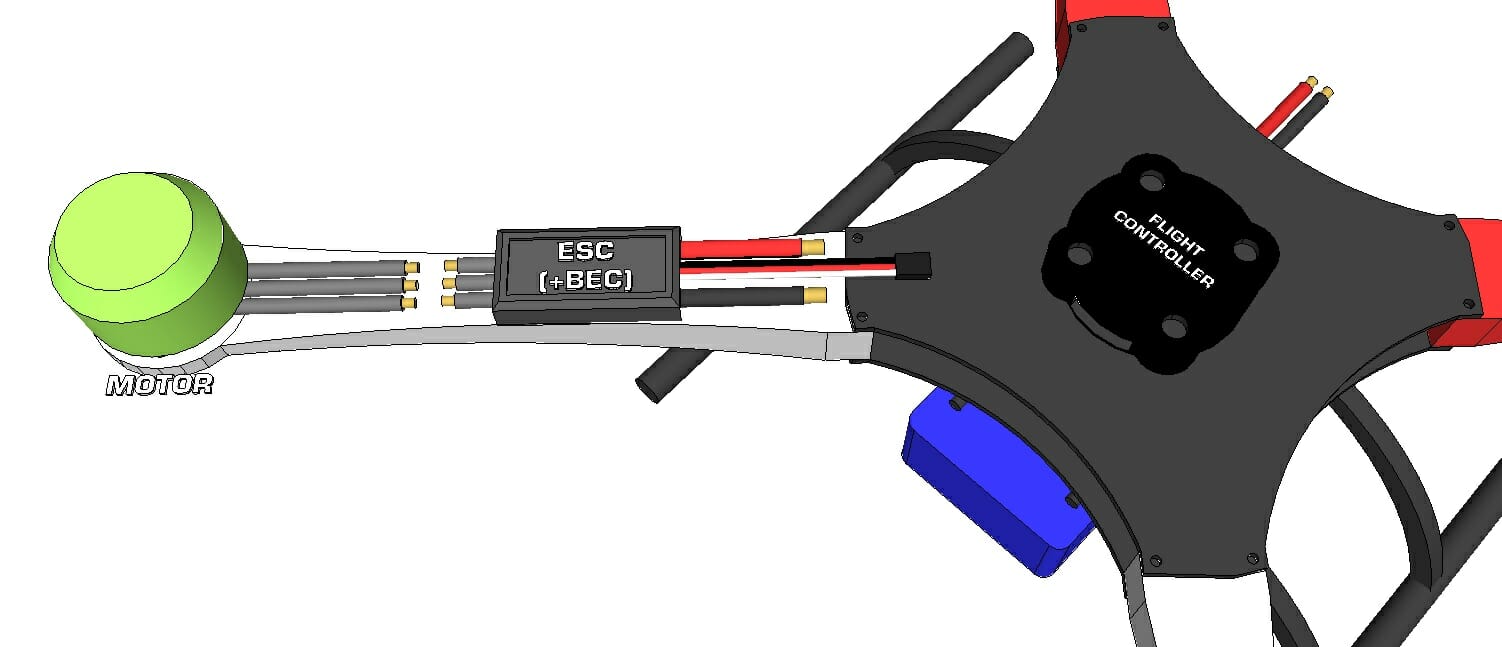
Βαθμονόμηση ESC
Το ESC θα λειτουργήσει εκτός κιβωτίου, αλλά τα σήματα (PWM / PWM) που σχετίζονται με το ελάχιστο και το μέγιστο γκάζι μπορεί να μην ταιριάζουν με αυτό που παρέχει ο πομπός σας Επομένως, πρέπει να "εκπαιδεύσετε" κάθε ESC με τις απαιτούμενες τιμές. Βεβαιωθείτε ότι οι έλικες δεν είναι τοποθετημένες σε κινητήρες. Ανατρέξτε στο εγχειρίδιο χρήσης του χειριστηρίου πτήσης. Μετά τον επαναπρογραμματισμό, το ESC διατηρεί την τρέχουσα διαμόρφωσή του ακόμη και όταν δεν τροφοδοτείται. Επομένως, κάθε ESC προγραμματίζεται μόνο μία φορά, κατά την αρχική δοκιμή / ρύθμιση.
Συνήθως υπάρχει μια ενότητα στο εγχειρίδιο του ελεγκτή πτήσης που εξηγεί τον τρόπο βαθμονόμησης του ESC και εξηγεί πώς να το κάνετε. Εάν όχι, μπορείτε να δοκιμάσετε μία από τις μεθόδους που προτείνονται παρακάτω. Για άλλη μια φορά, αν δεν έχετε ακόμη αφαιρέσει τις προπέλες σας, ήρθε η ώρα να το κάνετε.
Πομπός
- Συνδέστε ένα ESC στον πείρο «Γκάζι» του δέκτη σας. Εάν το ESC σας δεν έχει συνδεδεμένο BEC, μπορείτε να συνδέσετε ένα ESC με δυνατότητα BEC σε άλλο pin του δέκτη (όπως η είσοδος μπαταρίας) απλά για να τροφοδοτήσετε τον δέκτη.
- Συνδέστε το ESC στον κατάλληλο κινητήρα (εάν δεν είναι ήδη συνδεδεμένος).
- Ρυθμίστε το μπαστούνι / χειριστήριο που σχετίζεται με το "Throttle" στο μέγιστο (συνήθως το αριστερό ραβδί / joystick και πλήρες εμπρός / πάνω) και, στη συνέχεια, ενεργοποιήστε τον πομπό.
- Συνδέστε τη μπαταρία LiPo στην πλακέτα διανομής ισχύος ή απευθείας σε αυτό το ESC (εάν οι υποδοχές είναι συμβατές).
- Ο κινητήρας πρέπει να ηχεί τρεις φορές (11,1V LiPo) και να ακολουθεί σύντομη παύση ακολουθούμενη από δύο σύντομα ηχητικά σήματα (που είναι το μέγιστο μπιπ).
- Αμέσως μετά από σύντομα ηχητικά σήματα, μετακινήστε το μπαστούνι / χειριστήριο γκαζιού στην χαμηλότερη θέση (που είναι το ελάχιστο μπιπ).
- Ο κινητήρας πρέπει να ηχεί τρεις φορές (11,1V LiPo) και να ακολουθεί ένα μακρύ μπιπ.
- Το εύρος του γκαζιού για αυτό το ESC είναι τώρα ρυθμισμένο, προχωρήστε στο επόμενο μέχρι να βαθμονομηθούν όλα τα ESC.
Άλλες μέθοδοι
Ακολουθήστε τις οδηγίες στο εγχειρίδιο χρήσης του προϊόντος για να ταιριάξετε το ελάχιστο / μέγιστο εύρος του σήματος εισόδου ESC με αυτό που θα λάβει από τον πομπό.
- USB: Ορισμένα μοντέλα ESC μπορούν να προγραμματιστούν μέσω USB, είτε ανεξάρτητα είτε με προσαρμογέα.
- Πίνακας προγραμματισμού: Εξωτερικός πίνακας προγραμματισμού ESC, μπορεί να χρησιμοποιηθεί με σχεδόν οποιοδήποτε ESC και είναι αυτόνομη συσκευή.
- Μικροελεγκτής: Αυτή η μέθοδος δεν χρησιμοποιείται ευρέως, αλλά είναι σίγουρα δυνατό να επαναπρογραμματίσετε το ESC με μικροελεγκτή εάν έχετε τον σωστό κωδικό και μπορείτε να συνδεθείτε σωστά.
- Flight Controller: Ορισμένα χειριστήρια πτήσης σάς επιτρέπουν να βαθμονομείτε ή να προγραμματίζετε ESC μέσω της διεπαφής προγραμματισμού τους. Διαβάστε τις οδηγίες για τον ελεγκτή πτήσης σας για να δείτε εάν αυτό είναι δυνατό.
Κινητήρας και κύριος ρότορας (έλικα). Κατεύθυνση.
Είστε τώρα έτοιμοι να εγκαταστήσετε τις έλικες. Ας επιστρέψουμε στο 3 μάθημα, το οποίο συζητά την κατεύθυνση του κύριου ρότορα για τη δημιουργία ώσης. Όλοι οι έλικες έχουν πάνω και κάτω, και κατεύθυνση περιστροφής CW (δεξιόστροφα) και CCW (αριστερόστροφα). Συνήθως υπάρχει κείμενο στην κορυφή ενός στηρίγματος που υποδεικνύει το ύψος και τη διάμετρό του. Όταν η έλικα είναι τοποθετημένη στον άξονα του κινητήρα, αυτό το πάνω τμήμα δείχνει προς τον ουρανό, ανεξάρτητα από το αν ο κινητήρας είναι τοποθετημένος στην κορυφή της δέσμης του drone ή στο κάτω μέρος του drone.

Λίστα ελέγχου πιλότου πριν από την πτήση
Αν και το drone δεν είναι τόσο πολύπλοκο ή επικίνδυνο όσο ένα πραγματικό εμπορικό αεροσκάφος, εσείς - ως πιλότος και πρέπει να έχει λίστα ελέγχου πριν από την πτήση για να βεβαιωθεί ότι η επερχόμενη πτήση δεν θα θέσει σε κίνδυνο άτομα ή περιουσία. Η παρακάτω λίστα καλύπτει μόνο τα απαραίτητα και πρέπει να εκτελείται πριν από κάθε πτήση (όχι μόνο πριν από την πρώτη).
- Βεβαιωθείτε ότι διαθέτετε κάποιο από τα οπτικά βοηθήματα για να πείτε ποια πλευρά του drone σας βρίσκεται μπροστά. Τουλάχιστον, προσθέστε έγχρωμη ταινία στις δύο μπροστινές δοκούς.
- Βεβαιωθείτε ότι η μπαταρία του εξοπλισμού ελέγχου είναι φορτισμένη.
- Ανακινήστε ελαφρά το UAV - τίποτα δεν πρέπει να χαλαρώσει, να κουδουνίσει ή να πέσει στο έδαφος. Ποτέ δεν θα μάθετε τι μπορεί να έχει μετατοπιστεί ή σπάσει ως αποτέλεσμα μιας σκληρής προσγείωσης σε μια προηγούμενη πτήση.
- Βεβαιωθείτε ότι οι έλικες είναι ακόμα καλά στερεωμένες.
- Πρώτα ενεργοποιήστε τον εξοπλισμό ελέγχου και, στη συνέχεια, ενεργοποιήστε το drone (κρατήστε τα χέρια σας μακριά από τους ρότορες).
- Βεβαιωθείτε ότι μπορείτε να οπλίσετε και να επανεξετάσετε αξιόπιστα τους κινητήρες (πρέπει να περιστρέφονται σε χαμηλές στροφές ανά λεπτό όταν «οπλίζετε» και να σταματούν να περιστρέφονται όταν «αφοπλίζετε»)
- Βεβαιωθείτε ότι έχετε βαθμονομήσει ή οι αισθητήρες είναι καλοί βαθμονομημένο (πρέπει να το κάνετε τακτικά)
- Ελέγξτε το εύρος του πομπού.
- Βεβαιωθείτε ότι η περιοχή της πτήσης είναι εντελώς καθαρή και αν κάποιος βρίσκεται μέσα σε αυτήν, ενημερώστε τους, ιδιαίτερα τα περίεργα παιδιά. ότι πετάτε με UAV και ότι δεν πρέπει να πλησιάζετε μέχρι να προσγειωθεί το drone με τους κινητήρες εντελώς σταματημένους.

Δοκιμές
Μέχρι να αποκτήσετε επαρκή εμπιστοσύνη στις ικανότητές σας ως πιλότος και σχεδιαστής drone, ακολουθεί η ακόλουθη διαδικασία προτείνεται σε όλους τα μη επανδρωμένα αεροσκάφη πριν από την πρώτη τους πτήση.
- Ενεργοποιήστε τους κινητήρες και βεβαιωθείτε ότι περιστρέφονται προς τη σωστή κατεύθυνση, όπως περιγράφεται στο εγχειρίδιο του ελεγκτή πτήσης.
- Σηκώστε το μπαστούνι / χειριστήριο γκαζιού πολύ αργά και βεβαιωθείτε ότι οι έλικες σπρώχνουν τον αέρα προς τα κάτω προς το έδαφος. Η χρήση χαρτιού είναι μια ασφαλής επιλογή για οπτική επιθεώρηση.
- Μετακινήστε το Pitch stick / joystick πολύ προσεκτικά προς τα εμπρός / προς τα πίσω για να βεβαιωθείτε ότι το drone κλίνει προς τα εμπρός / προς τα πίσω σωστά.
- Μετακινήστε πολύ προσεκτικά το Roll stick / joystick σε κάθε πλευρά για να βεβαιωθείτε ότι το drone ανταποκρίνεται σωστά.
Εάν το drone δεν συμπεριφέρεται σωστά, υπάρχουν πολλοί πιθανοί λόγοι, μεταξύ των οποίων οι πιο συνηθισμένοι είναι:
- Ένας ή περισσότεροι κινητήρες περιστρέφονται σε λάθος κατεύθυνση.
- Ο ελεγκτής πτήσης δεν εγκαταστάθηκε σωστά και αυτό που θεωρεί "εμπρός" είναι διαφορετικό από το φυσικό σας UAV.
- Μία ή περισσότερες επαφές μεταξύ του δέκτη και του ελεγκτή πτήσης δεν συνδέονται σωστά ή ακόμη και σε λάθος μέρος.
- everythingσως όλα έχουν ρυθμιστεί σωστά, πολύ γρήγορα ή απότομα για να ανταποκριθούν στις πληροφορίες του χρήστη.
Σχέδιο Έκτακτης Ανάγκης
που μόλις ξεκίνησε να εργάζεται στο πεδίο ή / και με νέο drone. Η παρακάτω λίστα προορίζεται να σας δώσει πράγματα για να σκεφτείτε και μερικές ιδέες για το πώς και γιατί να απαντήσετε σε επίδοξους πιλότους. Η απόφαση λαμβάνεται κατά περίπτωση και σε ορισμένες περιπτώσεις ενδέχεται να έρχεται σε αντίθεση με αυτό που προτείνεται εδώ. Γνωρίστε λοιπόν τον εαυτό σας, γνωρίστε το περιβάλλον σας και προσέξτε! Σε όλες σχεδόν τις περιπτώσεις, θα ήταν καλύτερο να χάσετε το drone παρά να διακινδυνεύσετε να συγκρουστείτε με ανθρώπους ή περιουσίες.
Το drone είναι πολύ μακριά και δεν ξέρετε ποια κατεύθυνση είναι.
- Μειώστε το γκάζι και παρατηρήστε αν το drone ανταποκρίνεται (ελέγχει αν υπάρχει σύνδεση).
- Εάν το drone ανταποκρίνεται στο αέριο, δοκιμάστε να προσγειωθείτε εκεί (αν μπορείτε).
- Εάν αυτή η τοποθεσία δεν είναι κατάλληλη για προσγείωση, προσπαθήστε προσεκτικά να στρέψετε το drone προς τα εμπρός (τίποτα δραστικό) και αν το drone αντιδρά στηριζόμενη στη θέση σας, η κίνηση αριστερά ή δεξιά στον ουρανό θα σας επιτρέψει να προσδιορίσετε τον προσανατολισμό του. Εάν δεν φαίνεται να κινείται αριστερά ή δεξιά, μπορεί να κινείται προς το μέρος σας ή μακριά από εσάς, οπότε αναιρέστε αυτό που μόλις κάνατε και δοκιμάστε να σκουπίσετε αριστερά.
Το drone αποκλίνει ξαφνικά απότομα εκτός πορείας (με ή χωρίς λόγο).
- Εάν δεν είστε ικανός να πιλοτάρετε (να προσπαθήσετε να το επαναφέρετε), πετάξτε εντελώς το γκάζι και αφήστε το να πέσει: σε αυτή την περίπτωση, η σκέψη για ριζική δράση μπορεί να οδηγήσει στο γεγονός ότι χάνετε την όραση του drone ή, ακόμη χειρότερα, το drone θα αρχίσει να ανεβαίνει για να πέσει από μεγαλύτερη απόσταση.
Το drone κινείται γρήγορα προς τους ανθρώπους.
- Αέριο στο μέγιστο, ώστε να αποκτήσει υψόμετρο και να πετάξει πάνω τους. το drone σας πιθανότατα θα έχει τον σωστό γενικό προσανατολισμό, οπότε είναι καλύτερο να χάσετε το drone παρά να πετάξετε σε ανθρώπους.
- Αφού φτάσετε στο βέλτιστο υψόμετρο, προσπαθήστε να ανακτήσετε τον έλεγχο και, στη συνέχεια, τοποθετήστε το έτσι ώστε να βρίσκεται πάνω από την καθαρή περιοχή προσγείωσης.
Το drone κινείται γρήγορα προς το μέρος σας.
- Αέριο στο μηδέν. άφησέ τον να χαράξει στο έδαφος, παρά να πετάξει στο κεφάλι σου.
Το drone δεν ανταποκρίνεται στην είσοδο από τον εξοπλισμό ελέγχου.
- Σε αυτή την περίπτωση, δεν μπορείτε να κάνετε τίποτα. Εάν το drone σας είναι ακόμα στον αέρα, οι μπαταρίες του τηλεχειριστηρίου σας μπορεί να έχουν εξαντληθεί.
Το drone χάνει την προπέλα.
- Η απώλεια προπέλας επηρεάζει τόσο την ώση όσο και το χτύπημα. προσπαθήστε να ισιώσετε πρώτα το χασμουρητό (πιθανότατα πρέπει να κρατήσετε το ραβδί / χειριστήριο συνδεδεμένο με το χασμουρητό, στην ακραία θέση) και, στη συνέχεια, ταυτόχρονα μετακινήστε προσεκτικά το γκάζι / το γκάζι προς τα πάνω για να αποφύγετε μια σύγκρουση, και στη συνέχεια το γκάζι προς τα κάτω Ε
Πρώτη πτήση
Ανεξάρτητα από την προηγούμενη πτητική σας εμπειρία, η πρώτη σας πτήση, ειδικά με προσαρμοσμένο UAV πολλαπλών κινητήρων, θα πρέπει να είναι όσο το δυνατόν πιο διακριτική. Ο σκοπός της πρώτης πτήσης είναι να βεβαιωθείτε ότι όλα έχουν ρυθμιστεί σωστά. καθώς και τον εντοπισμό τυχόν σοβαρών προβλημάτων.
- Τοποθεσία: ανοιχτός χώρος, μακριά από κτίρια, ανθρώπους και ιδιοκτησία. Για παράδειγμα: ένα άδειο γήπεδο ποδοσφαίρου, γήπεδο μπέιζμπολ και ούτω καθεξής θα ήταν το ιδανικό. Δεν πρέπει να πνέει καθόλου άνεμος.
- Περάστε τη λίστα ελέγχου πριν από την πτήση του πιλότου.
- Σταθείτε περίπου 2 μέτρα μακριά από το drone με το μπροστινό μέρος του drone στραμμένο μακριά σας.
- Οπλίστε τους κινητήρες.
- Μετακινήστε απαλά το μπαστούνι / χειριστήριο γκαζιού προς τα πάνω. Φτάστε στο σημείο όπου το drone είναι έτοιμο να απογειωθεί. Μπορεί να υπάρχουν κάποιες επιπτώσεις στο έδαφος που προκαλούν το drone να αναπηδά ελαφρώς, αλλά μην ανησυχείτε.
- Προσθέστε γκάζι για να κατεβάσετε το drone από το έδαφος και να συνηθίσετε στα χειριστήρια - προσπαθήστε να το κρατήσετε σε μια συγκεκριμένη ακτίνα και δείτε πώς αντιδρά στις κινήσεις σας με μπαστούνι / χειριστήριο.
- Κάντε μικρές, σταδιακές και ρευστές κινήσεις - τίποτα πολύ ξαφνικό. Χαμηλώστε το μπαστούνι γκαζιού για να αποφύγετε ατύχημα.
- Εάν το μη επανδρωμένο αεροσκάφος σας δεν συμπεριφέρεται όπως αναμενόταν (για παράδειγμα, η μετακίνηση του άξονα "Pitch" οδηγεί στο βήμα του, καθώς και η κύλιση αριστερά ή δεξιά), κάτι δεν πάει καλά και θα πρέπει να μάθετε αιτίες των εντοπισμένων προβλημάτων...
- Εάν το μη επανδρωμένο αεροσκάφος συμπεριφέρεται όπως αναμενόταν, το καθήκον σας είναι να διατηρείτε σταθερά τη θέση του σε ύψος 1,2-2 μέτρων από το έδαφος. Μην τρελαίνεσαι τόσο γρήγορα.


.Πρόσθετες πτήσεις
Τώρα που επιλύσατε προβλήματα και πετάτε άνετα σε ελεγχόμενο περιβάλλον, μπορείτε να προχωρήσετε με τη δεύτερη πτήση.
- Δεδομένου ότι το drone δεν έχει ακόμη δοκιμαστεί πλήρως, προτείνουμε να περάσετε από την πλήρη διαδικασία πριν την πτήση για την πρώτη πτήση, η οποία δεν πρέπει να διαρκέσει πολύ.
- Χρησιμοποιώντας ομαλές κινήσεις, συνηθίστε πώς αντιδρά το drone στις κινήσεις ραβδιών / ραβδιών κρατώντας το σε ασφαλή απόσταση.
- Η προσαρμογή στην οδήγηση ενός drone θα πρέπει να γίνεται χωρίς τη βοήθεια FPV και διαφόρων αισθητήρων.







