What is a quadcopter?
A quadrocopter is a kind of multicopter. A multicopter is a multi-engine or multi-rotor aircraft (helicopter), the main rotor of which rotates diagonally in opposite directions. Multicopters differ by the number of motors (or by the number of rotors). Nowadays, multicopters with three or more rotors have been used.
The most common schemes are: 4/6/8 rotors. An apparatus with three rotor propellers is called a tricopter; with four - a quadcopter; with six - a hexacopter and with eight rotors - an octocopter. The use of each of the schemes basically determines such a parameter as - the mass of the payload, or, more simply, the weight that the multicopter can take on board.
Examples of modern multi-rotor solutions.
Modern multi-rotor solutions from different price niches:




From history
It all started back in 1922 with the Russian-American aircraft designer Georgy Aleksandrovich Botezat. Who invented the first of its kind working quadcopter. His apparatus was able not only to get off the ground, but also to hold out in the air for some time. At that time, such devices had one significant drawback - the principle of operation.

Of the four rotors, only one was the leading one (the rotation was set by the internal combustion engine), i.e. torque through a complex transmission was transmitted by one motor to the other 3 main rotor. It did not come to serial development. And such inventions as the "Tail rotor" and "Swashplate" forced to completely abandon the development of multi-rotor aircraft, later on, the world's first helicopter was created.
With the advent of the 21st century, multicopters have come into our lives as unmanned aerial vehicles or drones.
Main components of multicopters
Technically, about 5 years ago, three main components of multicopters (drones) appeared:
- Battery - lithium polymer (LiPo), less often lithium-ion (Li-Ion).
- Brushless or brushed rare earth motors.
- Remote controller (Control Panel / Hardware / Transmitter)

Operating principle
The operating principle of a modern multicopter is simple. Depending on the application scheme (3/4/6/8-rotor), each rotor is driven by an electric motor (electric motor). One half of the motors rotates the screws clockwise, and the other half counterclockwise. Thanks to this approach, to control the multicopter, the use of a tail rotor and a complex swashplate in the drone is not required.
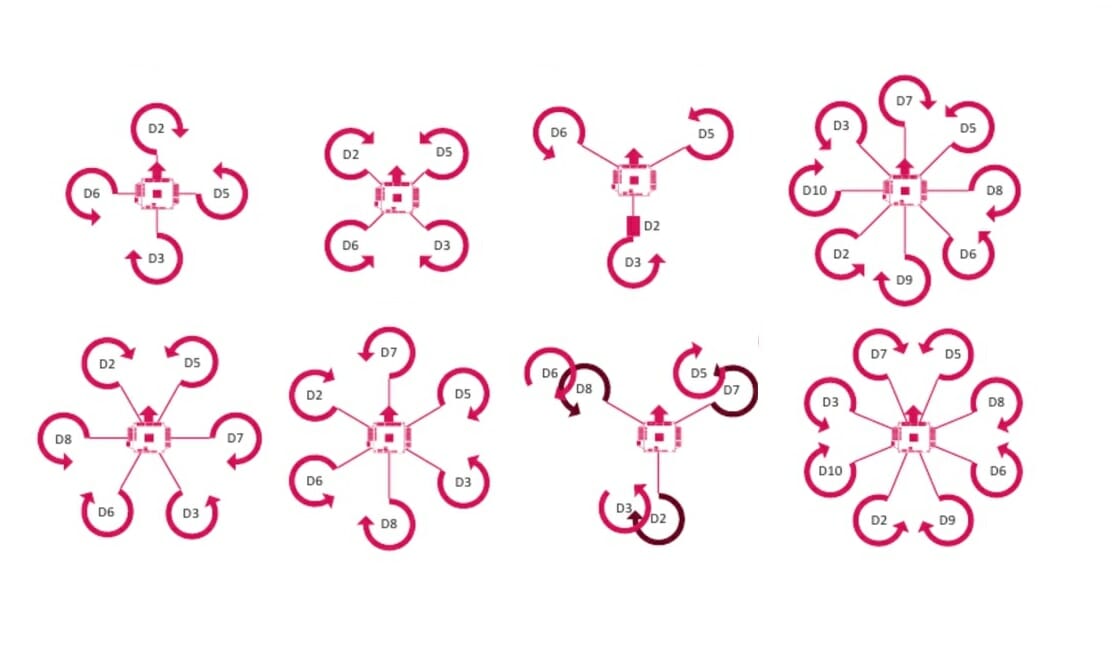
* The order of the direction of rotation of the multicopter rotor.
Flight control example:
- Increase RPM on all rotors - lift.
- Decrease in speed on all rotors - decrease.
- Increasing the revolutions of one half of the screws and decreasing the revolutions of the other half will set the movement to the side.
- Increasing the RPM for the clockwise propellers and decreasing the RPM for the counterclockwise propellers will rotate the drone.
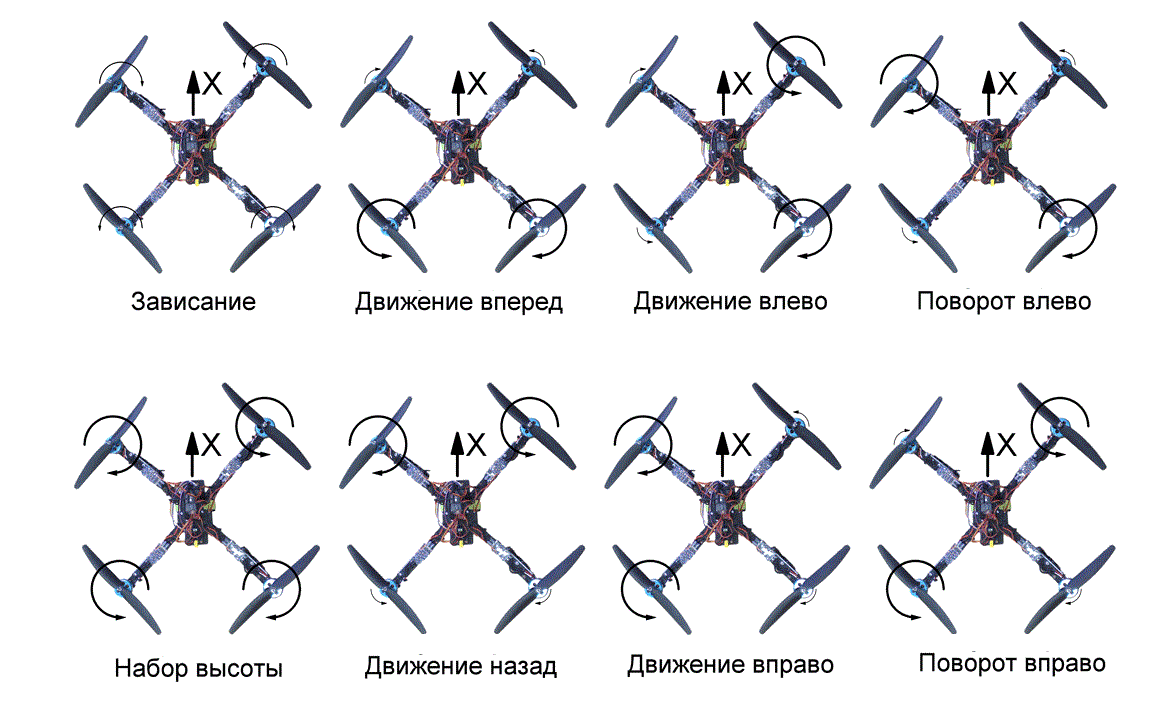
* Flight control scheme for the rotation of the rotors.
Motors
Two types of electric motors are currently used on modern multicopters (drones) - brushed and brushless. Brushless drones are mainly equipped with expensive and professional drones. Only budget options and toys are equipped with collector motors. More details about their differences can be found here

Control
The multicopter is controlled by a remote controller (aka control panel, equipment, transmitter ) via outgoing radio waves (usually, at frequencies 2.4GHz or 5.8GHz ).
To make the multicopter respond to the control panel requests, the drone is equipped with a whole complex of electronic systems:
- Microprocessor ( flight controller
- Gyroscope - is responsible for the stable behavior of the drone during flight (as a rule, it provides stabilization along 6 direction axes).
- Accelerometer - This sensor allows the processor to position the aircraft in a horizontal position relative to the ground.
- Barometric sensor (barometer) - provides the drone with a stable hover at the pilot's selected altitude.
- Sonar (ultrasonic sensor) - provides automatic landing and keeping a small height (1.5 - 3.5 meters), can also be used to fly around obstacles.
- GPS module - provides the geographic positioning of the drone, using data received from satellite systems. Due to its presence, the function of flying by points is realized, returning to the take-off site in case of loss of communication, or low battery charge, and also allows you to take flight readings, both at the time of flight and after.
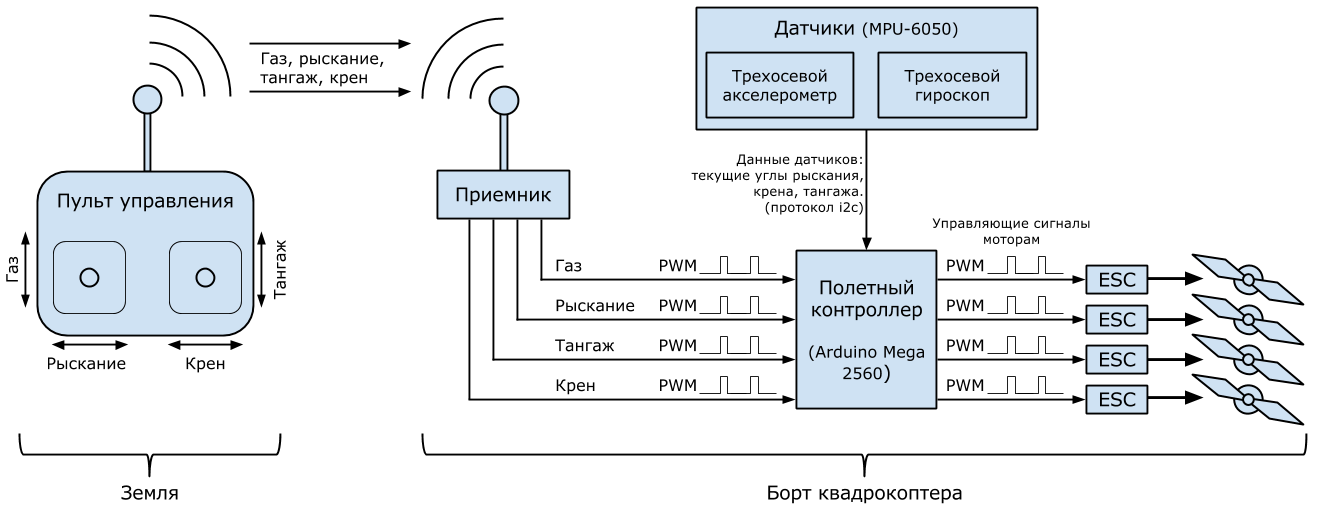
* The simplest scheme of a quadrocopter device.
What are they?
Currently, the consumer drone market offers a huge number of multicopters (drones), but in general they can be divided into three large groups: For Beginners / Amateur / Professional
For beginners - suitable for both children and adults for the purpose of first acquaintance and learning. As a rule, they are equipped with a microprocessor, a 6-axis gyroscope and a simple barometric sensor to ensure altitude hold.
Amateur - for pilots who already have experience with UAVs. More suitable for a specific application. For example, for aerial photography, or for sports such as drone racing. Drones in this group can have autonomous flight and survey functions.
Professional - Suitable exclusively for experienced pilots who use the capabilities of multicopters (drones) in the professional field. For example, professional photo and video shooting, geodesy, monitoring of land, traffic, in rescue operations, etc. In most cases, drones have autonomous flight and survey functions. The electronic filling is assembled from high-precision modern systems that ensure removal over long distances, and the power supply allows you to spend significantly more time in flight. The characteristic difference between such multicopters is their price.
For a more complete acquaintance with unmanned systems, we recommend topic "What is a drone?"
.






