Co to jest quadkopter?
Quadrocopter to rodzaj multikoptera. Multikopter to samolot wielosilnikowy lub wielowirnikowy (helikopter), którego główny wirnik obraca się po przekątnej w przeciwnych kierunkach. Multikoptery różnią się liczbą silników (lub liczbą wirników). Obecnie stosowane są multikoptery z trzema lub więcej wirnikami.
Najczęstsze schematy to: wirniki 4/6/8. Aparat z trzema śmigłami wirnika nazywa się tricopterem; z czterema - quadkopterem; z sześcioma - heksakopter iz ośmioma wirnikami - oktokopter. Zastosowanie każdego ze schematów determinuje przede wszystkim taki parametr jak – masa ładunku, a mówiąc prościej, waga, jaką multikopter może zabrać na pokład.
Przykłady nowoczesnych rozwiązań wielowirnikowych.
Nowoczesne rozwiązania wielowirnikowe z różnych nisz cenowych:




Z historii
Wszystko zaczęło się w 1922 roku od rosyjsko-amerykańskiego projektanta samolotów Georgy Aleksandrovich Botezat. Kto wynalazł pierwszy tego rodzaju działający quadkopter. Jego aparat był w stanie nie tylko oderwać się od ziemi, ale także przez pewien czas utrzymać się w powietrzu. W tym czasie takie urządzenia miały jedną istotną wadę - zasadę działania.

Spośród czterech wirników tylko jeden był wiodącym (obrót zadał silnik spalinowy), tj. moment obrotowy poprzez złożoną przekładnię był przenoszony przez jeden silnik na pozostałe 3 główne wirniki. Nie doszło do seryjnego rozwoju. A takie wynalazki jak „Śmigło ogonowe” i „Swashplate” zmusiły do całkowitego zarzucenia rozwoju samolotów wielowirnikowych, później powstał pierwszy na świecie śmigłowiec.
Wraz z nadejściem XXI wieku multikoptery zagościły w naszym życiu jako bezzałogowe statki powietrzne lub drony.
Główne elementy multicopterów
Technicznie około 5 lat temu pojawiły się trzy główne elementy multicopterów (dronów):
- Bateria - polimer litowy (LiPo), rzadziej litowo-jonowy (Li-Ion).
- Bezszczotkowe lub szczotkowe silniki ziem rzadkich.
- Pilot (Panel Sterowania/Sprzęt/Nadajnik)

Zasada działania
Zasada działania nowoczesnego multikoptera to prosty. W zależności od schematu zastosowania (3/4/6/8-rotor), każdy wirnik napędzany jest silnikiem elektrycznym (silnikiem elektrycznym). Jedna połowa silników obraca śruby zgodnie z ruchem wskazówek zegara, a druga połowa przeciwnie do ruchu wskazówek zegara. Dzięki takiemu podejściu do sterowania multicopterem w konstrukcji drona nie jest wymagane zastosowanie śmigła ogonowego i skomplikowanej tarczy sterującej.
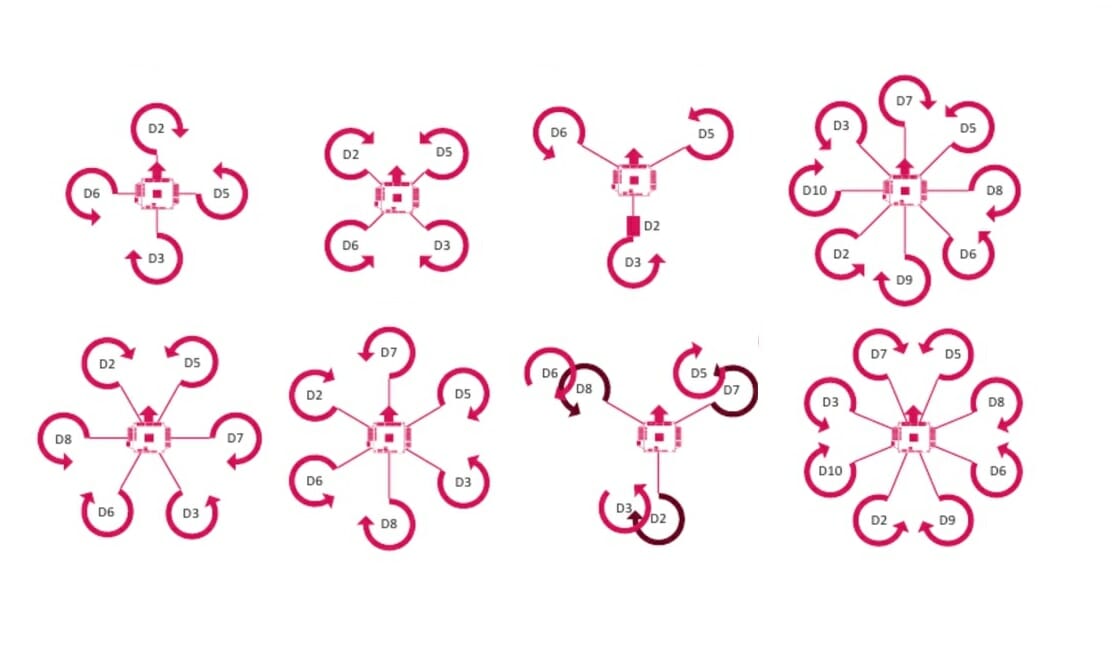
* Kolejność kierunku obrotów wirnika multicoptera.
Przykład sterowania lotem:
- Zwiększanie obrotów na wszystkich wirnikach - podnoszenie.
- Zmniejszenie prędkości na wszystkich wirnikach - zmniejszenie.
- Zwiększenie obrotów jednej połowy śrub i zmniejszenie obrotów drugiej połowy spowoduje przesunięcie ruchu w bok.
- Zwiększanie obrotów śmigieł prawoskrętnych i zmniejszanie obrotów śmigieł lewoskrętnych spowoduje obrót drona.
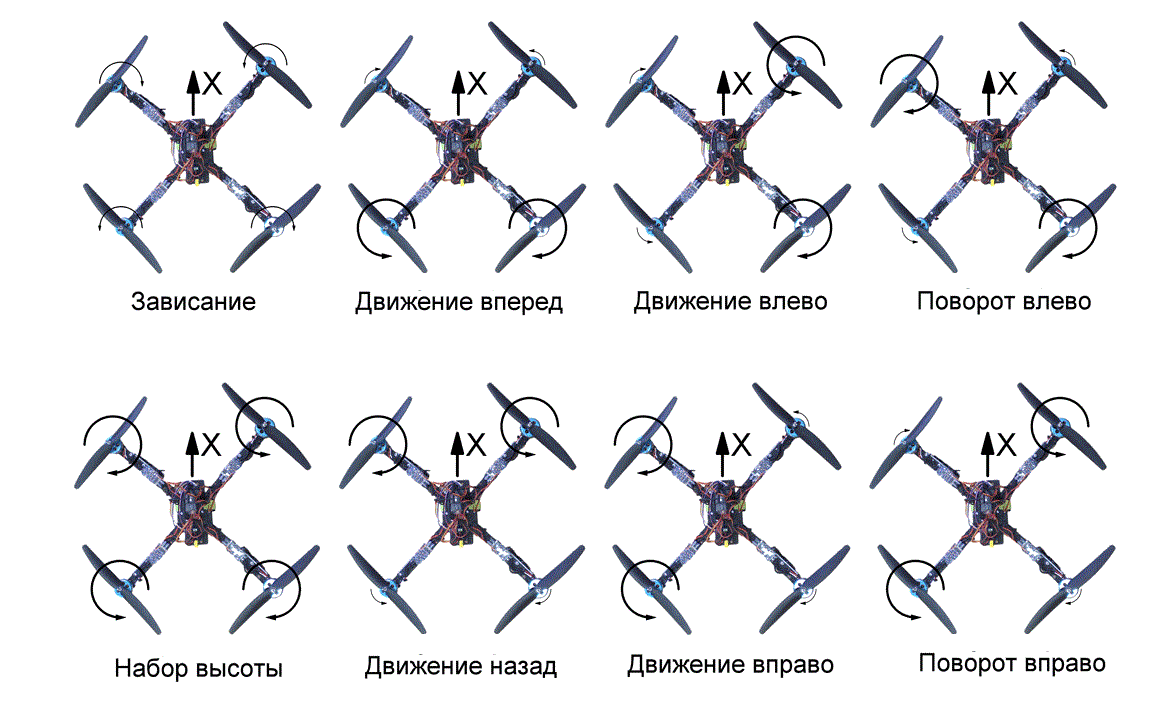
* Schemat sterowania lotem dla obrotu wirników.
Silniki
W nowoczesnych multikopterach (dronach) stosowane są obecnie dwa typy silników elektrycznych – szczotkowy i bezszczotkowy. Drony bezszczotkowe są wyposażone głównie w drogie i profesjonalne drony. Tylko opcje budżetowe i zabawki są wyposażone w silniki kolektorów. Więcej szczegółów na temat ich różnic znajdziesz tutaj

Sterowanie
Multicopter jest sterowany za pomocą pilota zdalnego sterowania (znanego również jako pilot, sprzęt, nadajnik ) za pośrednictwem wychodzących fal radiowych (zwykle na częstotliwościach 2,4 GHz lub 5,8 GHz ).
Aby multikopter odpowiadał na żądania centrali, dron wyposażony jest w cały kompleks systemów elektronicznych:
- Mikroprocesor ( kontroler lotu
- Żyroskop – odpowiada za stabilne zachowanie drona podczas lotu (z reguły zapewnia stabilizację w 6 osiach kierunkowych).
- Akcelerometr – Ten czujnik pozwala procesorowi na ustawienie samolotu w pozycji poziomej względem ziemi.
- Czujnik barometryczny (barometr) - zapewnia dronowi stabilny zawis na wybranej przez pilota wysokości.
- Sonar (czujnik ultradźwiękowy) - zapewnia automatyczne lądowanie i utrzymywanie niewielkiej wysokości (1,5 - 3,5 metra), może służyć również do omijania przeszkód.
- Moduł GPS – zapewnia pozycjonowanie geograficzne drona, wykorzystując dane otrzymane z systemów satelitarnych. Dzięki jego obecności realizowana jest funkcja latania przez punkty, powrotu na miejsce startu w przypadku utraty łączności lub niskiego poziomu naładowania baterii, a także umożliwia dokonywanie odczytów lotów, zarówno w czasie lotu, jak i po jego zakończeniu..
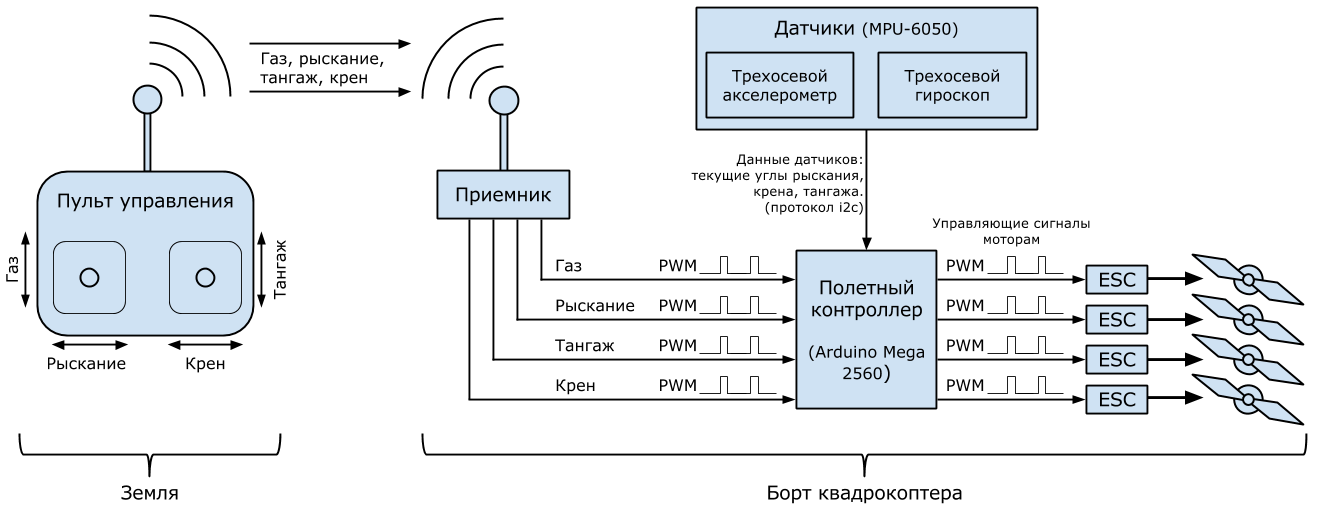
* Najprostszy schemat urządzenia quadrocopter.
Czym one są?
Obecnie konsumencki rynek dronów oferuje ogromną liczbę multikopterów (dronów), ale generalnie można je podzielić na trzy duże grupy: Dla Początkujących / Amatorów / Zawodowiec
Dla początkujących - nadaje się zarówno dla dzieci jak i dorosłych w celu pierwszego poznania i nauki. Z reguły są wyposażone w mikroprocesor, 6-osiowy żyroskop i prosty czujnik barometryczny, który zapewnia utrzymanie wysokości.
Amator - dla pilotów, którzy mają już doświadczenie z UAV. Bardziej odpowiedni do konkretnego zastosowania. Na przykład do fotografii lotniczej lub do sportów takich jak wyścigi dronów. Drony z tej grupy mogą pełnić funkcje autonomicznego lotu i pomiarów.
Professional - Przeznaczony wyłącznie dla doświadczonych pilotów, którzy wykorzystują możliwości multikopterów (dronów) na polu zawodowym. Na przykład profesjonalne fotografowanie i filmowanie, geodezja, monitoring terenu, ruchu, w akcjach ratowniczych itp. W większości przypadków drony mają funkcje autonomicznego lotu i badania. Elektroniczne wypełnienie składa się z bardzo precyzyjnych nowoczesnych systemów, które zapewniają usuwanie na duże odległości, a zasilanie pozwala spędzić znacznie więcej czasu w locie. Charakterystyczną różnicą między takimi multikopterami jest ich cena.
Dla pełniejszej znajomości systemów bezzałogowych polecamy temat "Co to jest dron?"
.






