Hvad er en quadcopter?
En quadrocopter er en slags multikopter. En multikopter er et multi-motor eller multi-rotor fly (helikopter), hvis hovedrotor roterer diagonalt i modsatte retninger. Multikoptere adskiller sig med antallet af motorer (eller med antallet af rotorer). I dag er multikoptere med tre eller flere rotorer blevet brugt.
De mest almindelige ordninger er: 4/6/8 rotorer. Et apparat med tre rotorpropeller kaldes en trikopter; med fire - en quadcopter; med seks - en hexakopter og med otte rotorer - en oktokopter. Brugen af hver af ordningerne bestemmer dybest set en sådan parameter som - nyttelastens masse eller mere enkelt, den vægt, som multikopteren kan tage om bord.
Eksempler på moderne multi-rotor-løsninger.
Moderne multi-rotor-løsninger fra forskellige prisnicher:




Fra historien
Det hele startede tilbage i 1922 med den russisk-amerikanske flydesigner Georgy Aleksandrovich Botezat. Hvem opfandt den første af sin slags arbejder quadcopter. Hans apparat var ikke kun i stand til at komme af jorden, men også at holde ud i luften i nogen tid. På det tidspunkt havde sådanne enheder en væsentlig ulempe - driftsprincippet.

Af de fire rotorer var kun en den førende (rotationen blev indstillet af forbrændingsmotoren), dvs. drejningsmoment gennem en kompleks transmission blev overført af en motor til den anden 3 hovedrotor. Det kom ikke til serieudvikling. Og sådanne opfindelser som "Tail rotor" og "Swashplate" tvunget til helt at opgive udviklingen af multi-rotor fly, som senere blev skabt verdens første helikopter.
Med fremkomsten af det 21. århundrede er multikoptere kommet ind i vores liv som ubemandede luftfartøjer eller droner.
Hovedkomponenter i multikoptere
Teknisk set for cirka 5 år siden dukkede tre hovedkomponenter i multikoptere (droner) op:
- Batteri - lithiumpolymer (LiPo), sjældnere lithium-ion (Li-Ion).
- Børsteløse eller børstede sjældne jordartsmotorer.
- Fjernbetjening (Kontrolpanel / Hardware / sender)

Driftsprincip
Funktionsprincippet for en moderne multikopter er enkel. Afhængigt af applikationsskemaet (3/4/6/8-rotor) drives hver rotor af en elektrisk motor (elmotor). Den ene halvdel af motorerne drejer skruerne med uret, og den anden halvdel mod uret. Takket være denne fremgangsmåde, for at styre multikopteren, er brug af en halerotor og en kompleks swashplate i dronen ikke påkrævet.
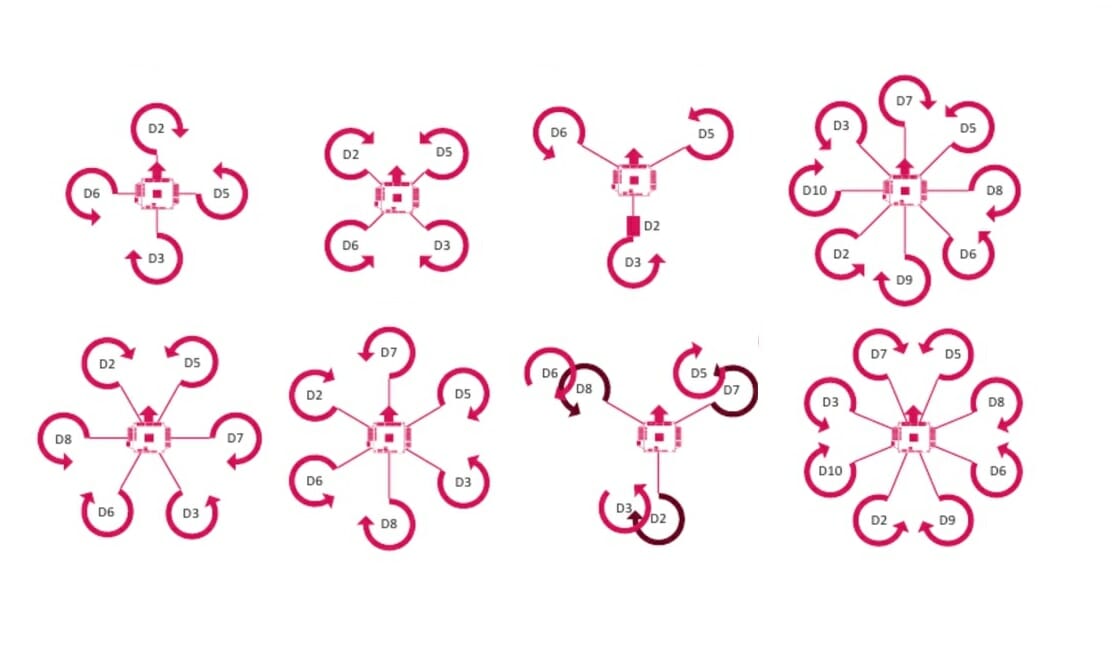
* Rækkefølgen af multikopterrotorens rotationsretning.
Eksempel på flyvekontrol:
- Forøg RPM på alle rotorer - løft.
- Fald i hastighed på alle rotorer - fald.
- Forøgelse af omdrejningerne på den ene halvdel af skruerne og faldende omdrejninger i den anden halvdel vil sætte bevægelsen til siden.
- Forøgelse af omdrejningstallet for propellerne med uret og faldende omdrejningstal for propellerne mod uret vil dreje dronen.
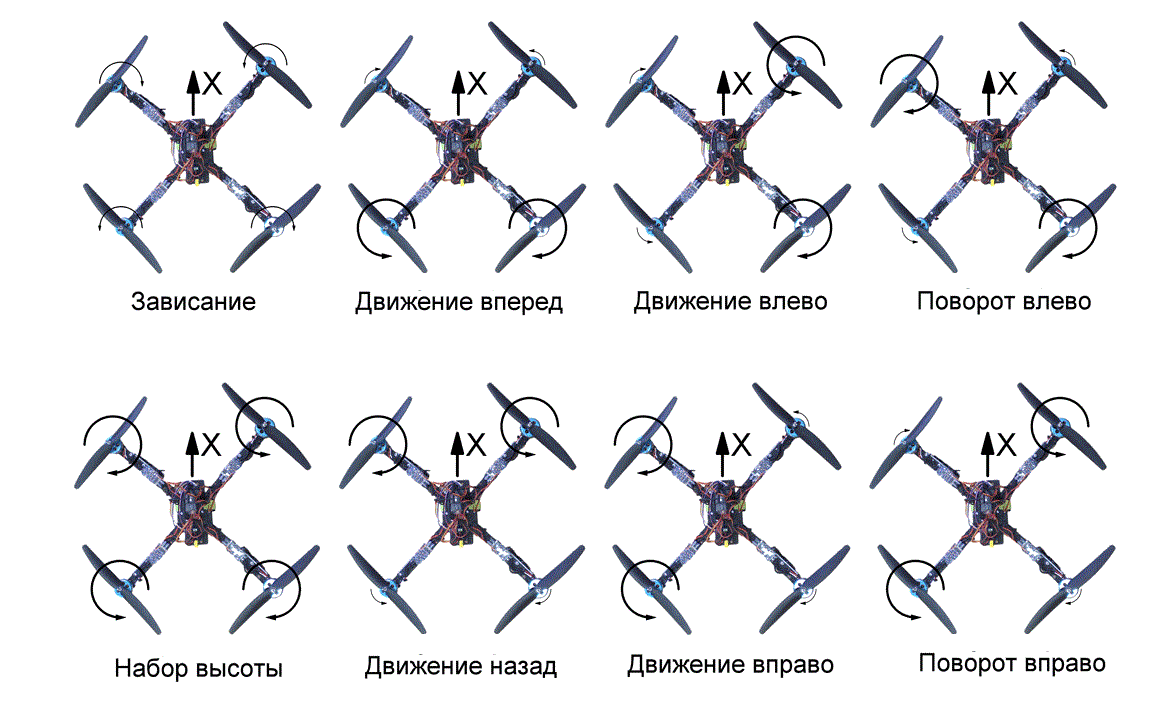
* Flyvekontrolordning for rotorernes rotation.
Motorer
To typer elmotorer bruges i øjeblikket på moderne multicoptere (droner) - børstede og børsteløse. Børsteløse droner er hovedsageligt udstyret med dyre og professionelle droner. Kun budgetmuligheder og legetøj er udstyret med samlermotorer. Flere detaljer om deres forskelle findes her

Kontrol
Multikopteren styres af en fjernbetjening (alias fjernbetjening, udstyr, sender ) via udgående radiobølger (normalt ved frekvenser 2,4 GHz eller 5,8 GHz ).
For at få multikopteren til at reagere på kontrolpanelets anmodninger, er dronen udstyret med et helt kompleks af elektroniske systemer:
- Mikroprocessor ( flyvekontroller
- Gyroskop - er ansvarlig for dronens stabile opførsel under flyvning (som regel giver det stabilisering langs 6 retningsakser).
- Accelerometer - Denne sensor giver processoren mulighed for at placere flyet i en vandret position i forhold til jorden.
- Barometrisk sensor (barometer) - giver dronen en stabil svæver i pilotens valgte højde.
- Sonar (ultralydssensor) - giver automatisk landing og holder en lille højde (1,5 - 3,5 meter), kan også bruges til at flyve rundt om forhindringer.
- GPS -modul - giver den geografiske positionering af dronen ved hjælp af data modtaget fra satellitsystemer. Takket være dets tilstedeværelse realiseres funktionen ved at flyve efter punkter, vende tilbage til startstedet i tilfælde af tab af kommunikation eller lav batteriladning, og giver dig også mulighed for at foretage flyaflæsning, både på flyvetidspunktet og efter.
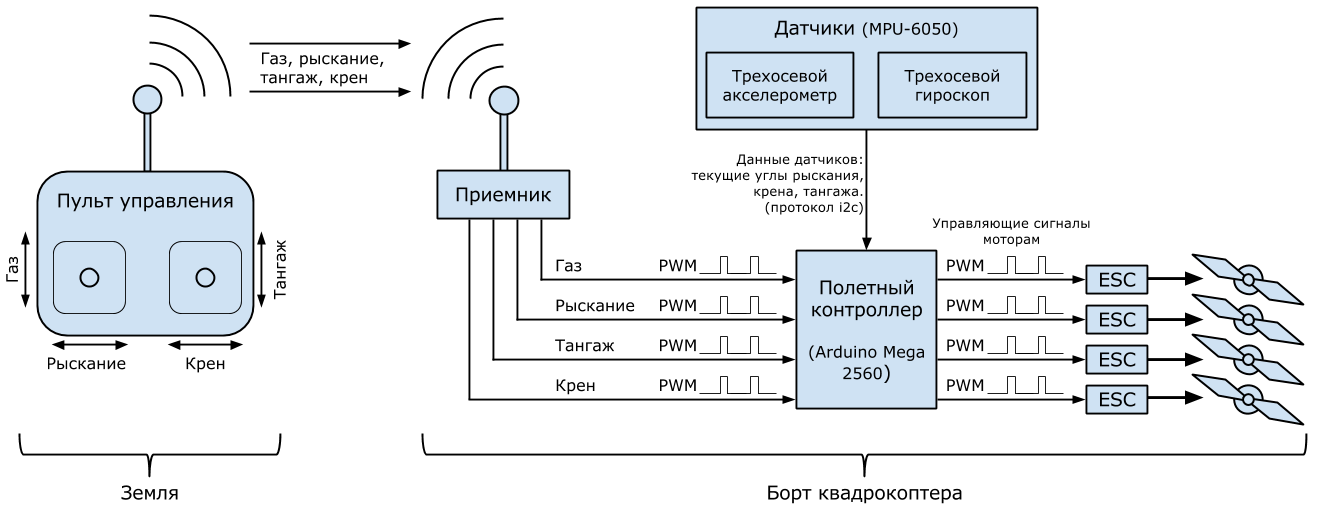
* Det enkleste skema for en quadrocopter -enhed.
Hvad er de?
I øjeblikket tilbyder forbrugerdronemarkedet et stort antal multicoptere (droner), men generelt kan de opdeles i tre store grupper: For begyndere / amatører / Professionel
For begyndere - velegnet til både børn og voksne med henblik på første bekendtskab og læring. Som regel er de udstyret med en mikroprocessor, et 6-akset gyroskop og en simpel barometrisk sensor for at sikre højdehold.
Amatør - for piloter, der allerede har erfaring med UAV'er. Mere egnet til en bestemt applikation. For eksempel til luftfotografering eller til sportsgrene som dronevæddeløb. Droner i denne gruppe kan have autonome flyve- og undersøgelsesfunktioner.
Professionel - Egnet udelukkende til erfarne piloter, der bruger multicopters (droner) kapaciteter inden for det professionelle område. For eksempel professionel foto- og videooptagelse, geodesi, overvågning af jord, trafik, i redningsaktioner mv. I de fleste tilfælde har droner autonome flyve- og undersøgelsesfunktioner. Den elektroniske påfyldning er samlet fra moderne systemer med høj præcision, der giver fjernelse over lange afstande, og strømforsyningen giver dig mulighed for at bruge meget mere tid på flyvning. Den karakteristiske forskel mellem sådanne multikoptere er deres pris.
For et mere komplet bekendtskab med ubemandede systemer anbefaler vi emne "Hvad er en drone?"
.






