Apa itu quadcopter?
Quadrocopter adalah sejenis multikopter. Multikopter adalah pesawat multi-mesin atau multi-rotor (helikopter), rotor utama yang berpusing menyerong ke arah yang bertentangan. Multikopter berbeza dengan bilangan motor (atau dengan jumlah rotor). Pada masa ini, multikopter dengan tiga atau lebih rotor telah digunakan.
Skema yang paling biasa adalah: 4/6/8 rotor. Alat dengan tiga baling-baling rotor disebut trikopter; dengan empat - quadcopter; dengan enam - heksacopter dan dengan lapan rotor - octocopter. Penggunaan masing-masing skema menentukan parameter seperti - jisim muatan, atau, lebih sederhana, berat yang dapat diambil oleh multikopter.
Contoh penyelesaian multi-rotor moden.
Penyelesaian multi-rotor moden dari ceruk harga yang berbeza:




Dari sejarah
Semuanya bermula pada tahun 1922 dengan pereka pesawat Rusia-Amerika Georgy Aleksandrovich Botezat. Yang mencipta quadcopter yang pertama seumpamanya. Alatnya tidak hanya dapat turun dari tanah, tetapi juga dapat bertahan di udara selama beberapa waktu. Pada masa itu, peranti sedemikian mempunyai satu kelemahan yang ketara - prinsip operasi.

Dari empat pemutar, hanya satu yang memimpin (putaran ditetapkan oleh mesin pembakaran dalaman), iaitu. tork melalui transmisi kompleks dihantar oleh satu motor ke 3 rotor utama yang lain. Itu tidak berkaitan dengan pembangunan bersiri. Dan penemuan seperti "Tail rotor" dan "Swashplate" terpaksa meninggalkan sepenuhnya pembangunan pesawat multi-rotor, kemudian helikopter pertama di dunia diciptakan.
Dengan kedatangan abad ke-21, multikopter telah memasuki kehidupan kita sebagai kenderaan udara atau drone tanpa pemandu.
Komponen utama multikopter
Secara teknikal, kira-kira 5 tahun yang lalu, tiga komponen utama multikopter (drone) muncul:
- Baterai - polimer litium (LiPo), lebih jarang ion litium (Li-Ion).
- Tanpa motor atau motor nadir bumi yang disikat.
- Alat kawalan jauh (Panel Kawalan / Perkakasan / Pemancar)

Prinsip operasi
Prinsip operasi multikopter moden adalah sederhana. Bergantung pada skema aplikasi (3/4/6/8-rotor), setiap rotor digerakkan oleh motor elektrik (motor elektrik). Separuh motor memutar skru mengikut arah jam, dan separuh yang lain berlawanan arah jam. Berkat pendekatan ini, untuk mengawal multikopter, penggunaan rotor ekor dan pelat swash kompleks tidak diperlukan dalam reka bentuk drone.
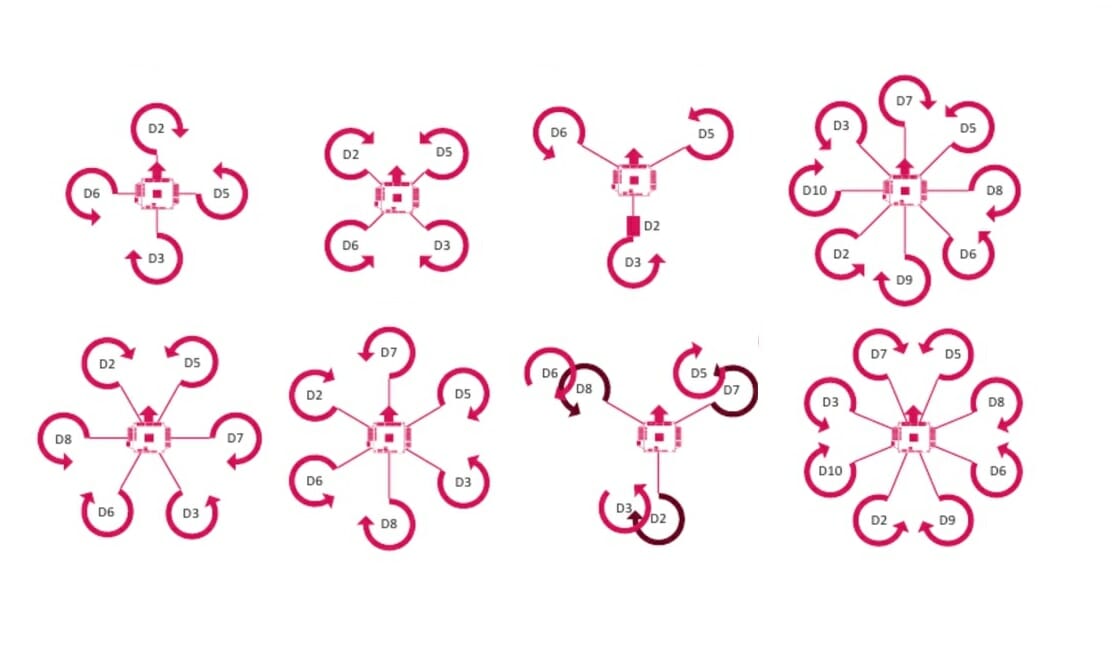
* Susunan arah putaran rotor multikopter.
Contoh kawalan penerbangan:
- Meningkatkan RPM pada semua pemutar - mengangkat.
- Penurunan kelajuan pada semua pemutar - penurunan.
- Menambah putaran satu setengah skru dan mengurangkan putaran separuh yang lain akan menggerakkan pergerakan ke sisi.
- Meningkatkan RPM untuk baling-baling mengikut arah jam dan menurunkan RPM untuk baling-baling berlawanan arah jarum jam akan memutar drone.
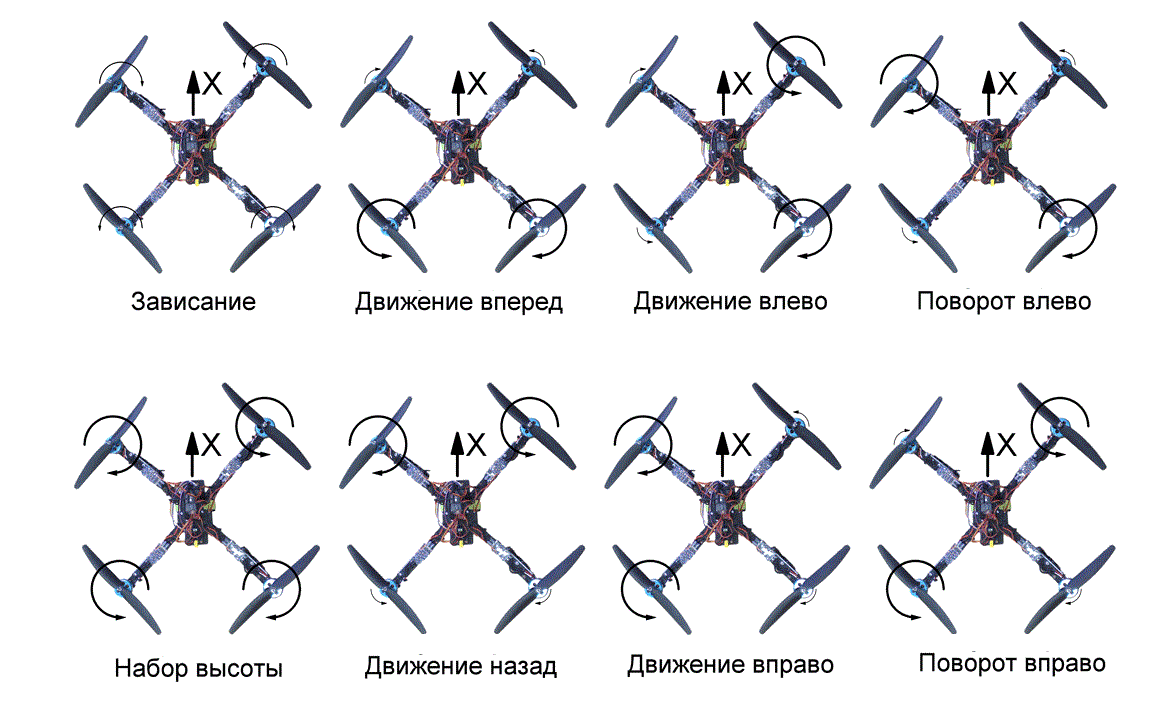
* Skema kawalan penerbangan untuk putaran pemutar.
Motor
Dua jenis motor elektrik kini digunakan pada multikopter moden (drone) - disikat dan tidak berus. Drone tanpa sikat terutamanya dilengkapi dengan drone yang mahal dan profesional. Hanya pilihan dan mainan anggaran yang dilengkapi dengan motor pengumpul. Maklumat lebih lanjut mengenai perbezaan mereka boleh didapati di sini

Kawalan
Multikopter dikendalikan oleh alat kawalan jauh (alias alat kawalan jauh, peralatan, pemancar ) melalui gelombang radio keluar (biasanya, pada frekuensi 2.4GHz atau 5.8GHz ).
Untuk membuat multikopter menanggapi permintaan panel kawalan, drone dilengkapi dengan keseluruhan sistem elektronik:
- Pengawal penerbangan mikroprosesor (, dilaksanakan sebagai litar mikro) - bertanggungjawab untuk operasi dan pengurusan semua pemadat elektronik drone.
- Giroskop - bertanggungjawab untuk kelakuan stabil drone semasa penerbangan (sebagai peraturan, ia memberikan penstabilan sepanjang 6 paksi arah).
- Accelerometer - Sensor ini membolehkan pemproses meletakkan pesawat dalam kedudukan mendatar berbanding dengan tanah.
- Sensor barometrik (barometer) - menyediakan drone dengan hover yang stabil pada ketinggian yang dipilih juruterbang.
- Sonar (sensor ultrasonik) - menyediakan pendaratan automatik dan menjaga ketinggian kecil (1,5 - 3,5 meter), juga dapat digunakan untuk terbang di sekitar rintangan.
- Modul GPS - menyediakan kedudukan geografi drone, menggunakan data yang diterima dari sistem satelit. Berkat kehadirannya, fungsi terbang dengan titik direalisasikan, kembali ke laman landas sekiranya kehilangan komunikasi, atau cas bateri rendah, dan juga memungkinkan anda melakukan pembacaan penerbangan, baik pada saat penerbangan maupun setelah.
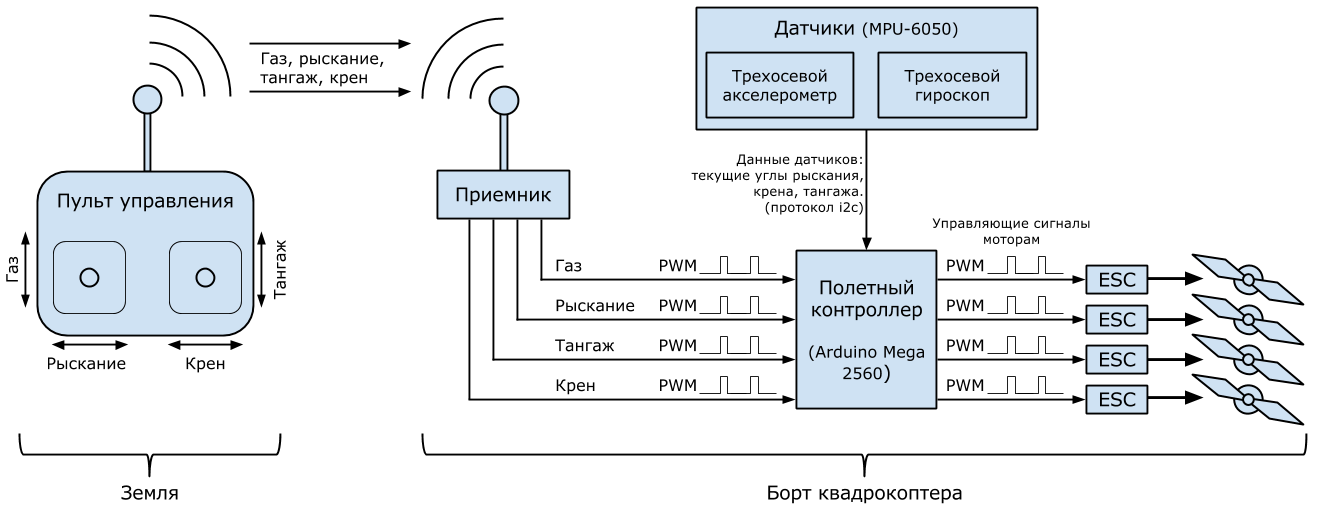
* Skema peranti quadrocopter termudah.
Apa itu?
Pada masa ini, pasaran drone pengguna menawarkan sejumlah besar helikopter (drone), tetapi secara umum ia dapat dibahagikan kepada tiga kumpulan besar: Untuk Pemula / Amatur / Profesional
Untuk pemula - sesuai untuk kanak-kanak dan orang dewasa untuk tujuan kenalan dan pembelajaran pertama. Sebagai peraturan, mereka dilengkapi dengan mikroprosesor, giroskop 6 paksi dan sensor barometrik sederhana untuk memastikan penahan ketinggian.
Amatur - untuk juruterbang yang sudah mempunyai pengalaman dengan UAV. Lebih sesuai untuk aplikasi tertentu. Contohnya, untuk fotografi udara, atau untuk sukan seperti perlumbaan drone. Drone dalam kumpulan ini boleh mempunyai fungsi penerbangan dan tinjauan autonomi.
Profesional - Sesuai secara eksklusif untuk juruterbang berpengalaman yang menggunakan kemampuan multikopter (drone) dalam bidang profesional. Contohnya, penggambaran gambar dan video profesional, geodesi, pemantauan darat, lalu lintas, dalam operasi menyelamat, dll. Dalam kebanyakan kes, drone mempunyai fungsi penerbangan dan tinjauan autonomi. Pengisian elektronik dipasang dari sistem moden berketepatan tinggi yang menyediakan penyingkiran jarak jauh, dan bekalan kuasa membolehkan anda menghabiskan lebih banyak masa dalam penerbangan. Perbezaan ciri antara multikopter tersebut adalah harganya.
Untuk kenalan yang lebih lengkap dengan sistem tanpa pemandu, kami mengesyorkan topik "Apa itu drone?"
.






