کوادکوپتر چیست؟
کوادروکوپتر نوعی مولتی کوپتر است. مولتی کوپتر یک هواپیمای چند موتوره یا چند روتور (هلیکوپتر) است که روتور اصلی آن به صورت مورب در جهت مخالف می چرخد. مولتیکوپترها از نظر تعداد موتورها (یا تعداد روتورها) متفاوت هستند. امروزه از مولتی کوپترهایی با سه یا چند روتور استفاده می شود.
رایج ترین طرح ها عبارتند از: 4/6/8 روتور. دستگاهی که دارای سه پروانه روتور است ، سه کروپ نامیده می شود. با چهار - یک کوادکوپتر ؛ با شش - هگزاکوپتر و با هشت روتور - یک هشت پا. استفاده از هر یک از طرحها عمدتا پارامتری مانند - جرم بار ، یا به عبارت ساده تر ، وزنی را که مولتی کوپتر می تواند در هواپیما تحمل کند ، تعیین می کند.
نمونه هایی از راه حل های چند روتور مدرن.
راه حل های چند روتور مدرن از طاقچه های مختلف قیمت:




از تاریخ
همه چیز در سال 1922 با طراح هواپیمای روسی-آمریکایی Georgy Aleksandrovich Botezat شروع شد. چه کسی اولین کوادکوپتر در نوع خود را اختراع کرد. دستگاه او نه تنها توانست از زمین خارج شود ، بلکه می تواند مدتی در هوا بماند. در آن زمان ، چنین دستگاههایی دارای یک اشکال قابل توجه بودند - اصل عملکرد.

از چهار روتور ، تنها یکی از آنها پیشرو بود (چرخش توسط موتور احتراق داخلی تنظیم شد) ، به عنوان مثال. گشتاور از طریق یک گیربکس پیچیده توسط یک موتور به 3 روتور اصلی دیگر منتقل می شود. به توسعه سریعی نرسید. و اختراعاتی مانند "رول دم" و "Swashplate" مجبور شدند توسعه هواپیماهای چند روتور را کاملاً کنار بگذارند ، بعداً ، اولین هلیکوپتر جهان ایجاد شد.
با ظهور قرن 21 ، چند هلیکوپتر به عنوان هواپیماهای بدون سرنشین یا هواپیماهای بدون سرنشین وارد زندگی ما شده است.
اجزای اصلی مولتی کوپترها
از نظر فنی ، حدود 5 سال پیش ، سه جزء اصلی مولتی کوپتر (هواپیماهای بدون سرنشین) ظاهر شد:
- باتری - لیتیوم پلیمر (LiPo) ، کمتر یون لیتیوم (Li-Ion).
- موتورهای براشلس یا برس های خاکی کمیاب.
- کنترل از راه دور (کنترل پنل / سخت افزار / فرستنده)

اصل کارکرد
اصل کارکردن یک مولتی کوپتر مدرن عبارت است از ساده. بسته به برنامه کاربردی (3/4/6/8-روتور) ، هر روتور توسط یک موتور الکتریکی (موتور الکتریکی) هدایت می شود. نیمی از موتورها پیچ ها را در جهت عقربه های ساعت و نیم دیگر را در جهت عقربه های ساعت می چرخانند. به لطف این رویکرد ، برای کنترل مولتی کوپتر ، استفاده از روتور دم و پلاستیک پیچیده پیچیده در طراحی هواپیمای بدون سرنشین ضروری نیست.
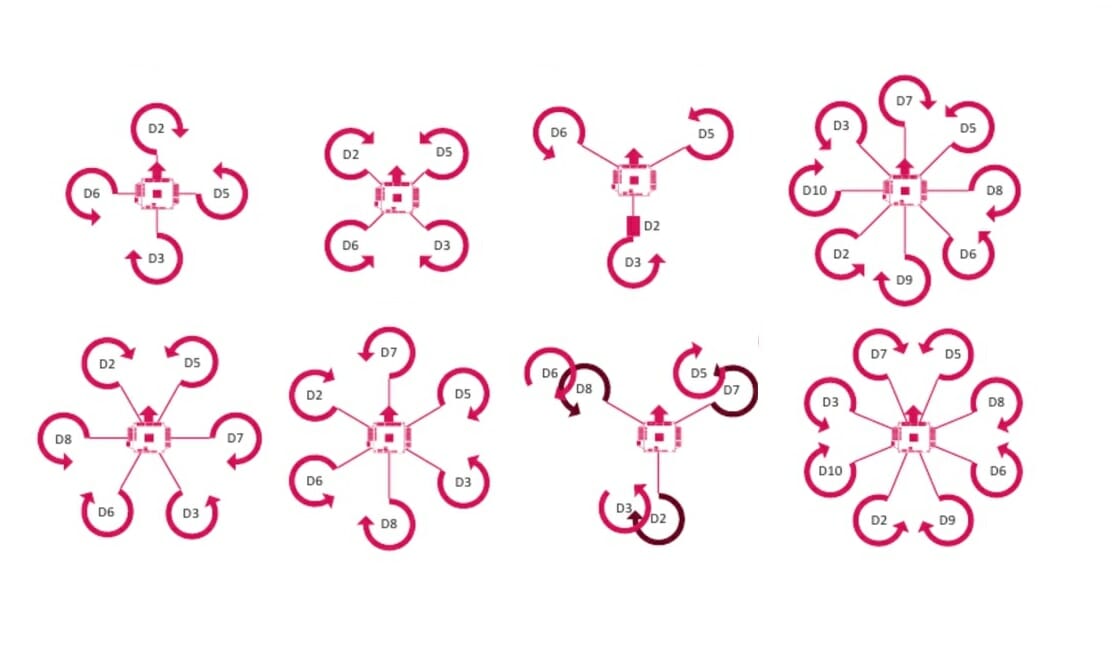
* ترتیب جهت چرخش روتور مولتی کوپتر.
نمونه ای از کنترل پرواز:
- افزایش دور در همه روتورها - بلند کردن.
- کاهش سرعت در همه روتورها - کاهش.
- افزایش دورهای نیمی از پیچ ها و کاهش دورهای نیمی دیگر ، حرکت را به طرفی تنظیم می کند.
- افزایش RPM برای ملخ های عقربه های ساعت و کاهش RPM برای ملخهای خلاف جهت عقربه های ساعت ، پهپاد را می چرخاند.
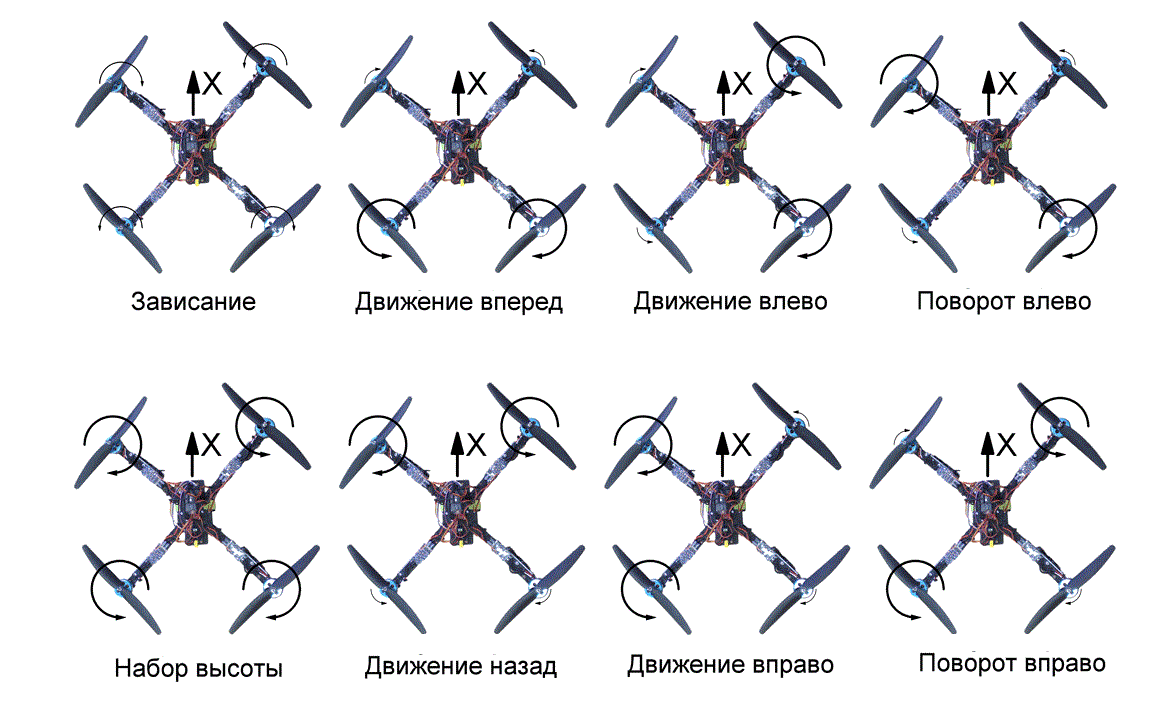
* طرح کنترل پرواز برای چرخش روتورها.
موتورها
دو نوع موتور الکتریکی در حال حاضر در مولتی کوپترهای مدرن (هواپیماهای بدون سرنشین) استفاده می شوند - برس و بدون برس. پهپادهای بدون برس عمدتا مجهز به پهپادهای گران قیمت و حرفه ای هستند. فقط گزینه های بودجه و اسباب بازی ها دارای موتورهای جمع کننده هستند. جزئیات بیشتر در مورد تفاوت آنها را می توانید در اینجا

کنترل
مولتی کوپتر توسط یک کنترل از راه دور (معروف به کنترل از راه دور ، تجهیزات ، فرستنده ) از طریق امواج رادیویی خروجی (معمولاً در فرکانس ها 2.4GHz یا 5.8GHz ).
برای پاسخگویی مولتی کوپتر به درخواست های صفحه کنترل ، هواپیمای بدون سرنشین مجهز به مجموعه ای از سیستم های الکترونیکی است:
- ریزپردازنده ( کنترل کننده پرواز
- ژیروسکوپ - مسئول رفتار پایدار هواپیمای بدون سرنشین در طول پرواز است (به عنوان یک قاعده ، تثبیت را در 6 محور جهت ایجاد می کند).
- شتاب سنج - این سنسور به پردازنده اجازه می دهد هواپیما را در موقعیت افقی نسبت به زمین قرار دهد.
- سنسور فشارسنج (فشارسنج) - شناور پایدار را در ارتفاع انتخابی خلبان برای هواپیمای بدون سرنشین فراهم می کند.
- سونار (سنسور اولتراسونیک) - امکان فرود خودکار و حفظ ارتفاع کوچک (1.5 تا 3.5 متر) را فراهم می کند ، همچنین می تواند برای پرواز در اطراف موانع مورد استفاده قرار گیرد.
- ماژول GPS - موقعیت جغرافیایی هواپیمای بدون سرنشین را با استفاده از داده های دریافت شده از سیستم های ماهواره ای فراهم می کند. با توجه به وجود آن ، عملکرد پرواز با نقاط تحقق می یابد ، در صورت از دست دادن ارتباط یا کم شدن شارژ باتری ، به محل برخاستن باز می گردد و همچنین به شما امکان می دهد قرائت پرواز را چه در زمان پرواز و چه بعد از آن انجام دهید. به
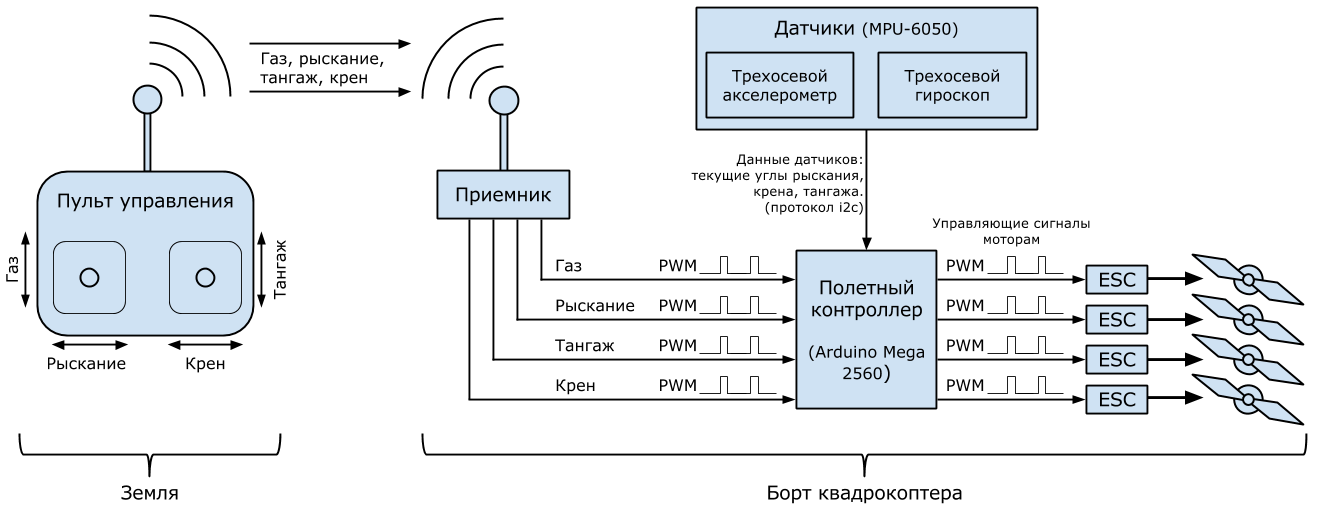
* ساده ترین طرح یک دستگاه کوادروکوپتر.
آنها چیست؟
در حال حاضر ، بازار مصرف هواپیماهای بدون سرنشین تعداد زیادی مولتی کوپتر (هواپیماهای بدون سرنشین) ارائه می دهد ، اما به طور کلی می توان آنها را به سه گروه بزرگ تقسیم کرد: برای مبتدیان / آماتور / حرفه ای
برای مبتدیان - برای کودکان و بزرگسالان به منظور اولین آشنایی و یادگیری مناسب است. به عنوان یک قاعده ، آنها به یک ریزپردازنده ، یک ژیروسکوپ 6 محوره و یک سنسور ساده فشارسنج مجهز شده اند تا از حفظ ارتفاع اطمینان حاصل شود.
آماتور - برای خلبانانی که قبلاً تجربه کار با پهپادها را داشته اند. بیشتر برای یک برنامه خاص مناسب است. به عنوان مثال ، برای عکاسی هوایی یا ورزش هایی مانند مسابقه هواپیماهای بدون سرنشین. هواپیماهای بدون سرنشین این گروه می توانند عملکردهای مستقل پرواز و بررسی داشته باشند.
حرفه ای - منحصراً برای خلبانان باتجربه که از قابلیت های چند هلیکوپتر (هواپیماهای بدون سرنشین) در زمینه حرفه ای استفاده می کنند مناسب است. به عنوان مثال ، عکسبرداری و فیلمبرداری حرفه ای ، زمین شناسی ، نظارت بر زمین ، ترافیک ، در عملیات نجات و غیره. در بیشتر موارد ، هواپیماهای بدون سرنشین دارای عملکردهای مستقل پرواز و بررسی هستند. پرکن الکترونیکی از سیستم های مدرن با دقت بالا مونتاژ شده است که حذف را در مسافت های طولانی فراهم می کند و منبع تغذیه به شما امکان می دهد زمان بیشتری را در پرواز بگذرانید. تفاوت مشخصه بین چنین مولتی کوپترهایی قیمت آنهاست.
برای آشنایی کاملتر با سیستم های بدون سرنشین ، موضوع "هواپیمای بدون سرنشین چیست؟" را توصیه می کنیم.







