Što je quadcopter?
Kvadrokopter je vrsta višekoptera. Višekopter je višemotorni ili višerotorni zrakoplov (helikopter), čiji se glavni rotor rotira dijagonalno u suprotnim smjerovima. Multikopter se razlikuje po broju motora (ili po broju rotora). U današnje vrijeme koriste se multikopteri s tri ili više rotora.
Najčešće sheme su: 4/6/8 rotora. Uređaj s tri rotora propelera naziva se trikopter; s četiri - četverokopter; sa šest - heksakopter i s osam rotora - osmokopter. Korištenje svake od shema uglavnom određuje takav parametar kao što je - masa korisnog tereta ili, jednostavnije rečeno, težina koju multikopter može ponijeti na brod.
Primjeri suvremenih rješenja s više rotora.
Suvremena rješenja s više rotora iz različitih cjenovnih niša:




Iz povijesti
Sve je počelo davne 1922. s rusko-američkim dizajnerom zrakoplova Georgijem Aleksandrovičem Botezatom. Tko je izumio prvi te vrste radni četverokopter. Njegov je aparat mogao ne samo sići s tla, već se i neko vrijeme držati u zraku. U to su vrijeme takvi uređaji imali jedan značajan nedostatak - načelo rada.

Od četiri rotora, samo je jedan bio vodeći (rotaciju je postavio motor s unutarnjim izgaranjem), tj. okretni moment kroz složeni prijenos prenio se jednim motorom na druga 3 glavna rotora. Nije došlo do serijskog razvoja. I takvi izumi kao što su "Tail rotor" i "Swashplate" prisilili su potpuno napustiti razvoj zrakoplova s više rotora, kasnije je stvoren prvi helikopter na svijetu.
Dolaskom 21. stoljeća, multikopteri su ušli u naše živote kao bespilotne letjelice ili bespilotne letjelice.
Glavne komponente višekoptera
Tehnički, prije otprilike 5 godina pojavile su se tri glavne komponente višekoptera (bespilotnih letjelica):
- Baterija - litij-polimer (LiPo), rjeđe litij-ion (Li-Ion).
- Motori bez četkica ili četkani motori od rijetkih zemalja.
- Daljinski upravljač (Upravljačka ploča / hardver / odašiljač)

Princip rada
Princip rada modernog višekoptera je jednostavan. Ovisno o shemi primjene (3/4/6/8-rotor), svaki rotor pokreće elektromotor (elektromotor). Jedna polovica motora okreće vijke u smjeru kazaljke na satu, a druga polovica u smjeru suprotnom od kazaljke na satu. Zahvaljujući ovom pristupu, za upravljanje višekopterom, upotreba repnog rotora i složene okretne ploče nije potrebna u dizajnu drona.
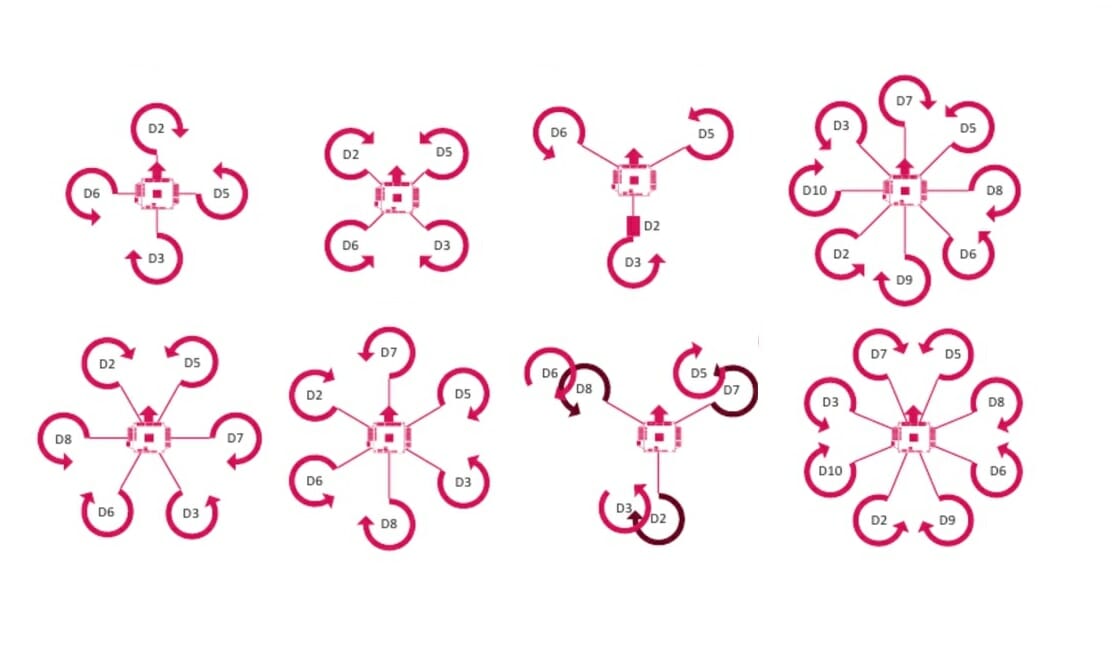
* Redoslijed smjera rotacije rotora višekoptera.
Primjer kontrole leta:
- Povećanje broja okretaja na svim rotorima - podizanje.
- Smanjenje brzine na svim rotorima - smanjiti.
- Povećanjem okretaja jedne polovice vijaka i smanjenjem okretaja druge polovice pomak će se postaviti u stranu.
- Povećanjem broja okretaja za elise u smjeru kazaljke na satu i smanjenjem broja okretaja za elise u smjeru suprotnom od kazaljke na satu rotirat će se bespilotna letjelica.
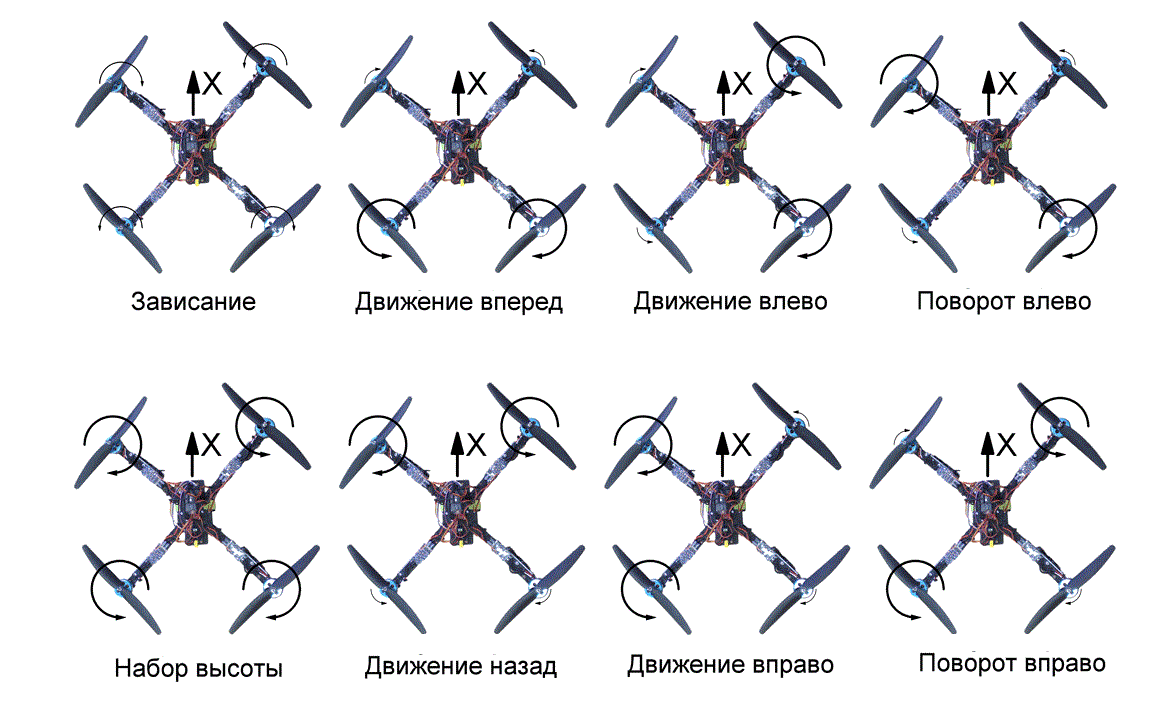
* Shema kontrole leta za rotaciju rotora.
Motori
Dvije vrste elektromotora trenutno se koriste na modernim višekopterima (bespilotnim letjelicama) - četkani i bez četkica. Bespilotne letjelice bez četkica uglavnom su opremljene skupim i profesionalnim dronovima. Samo proračunske opcije i igračke opremljene su kolektorskim motorima. Više pojedinosti o njihovim razlikama možete pronaći ovdje

Upravljanje
Multikopterom upravlja daljinski upravljač (poznat i kao daljinski upravljač, oprema, odašiljač ) putem odlaznih radio valova (obično, na frekvencijama 2,4 GHz ili 5,8 GHz ).
Kako bi višekopter odgovorio na zahtjeve upravljačke ploče, bespilotna letjelica je opremljena čitavim kompleksom elektroničkih sustava:
- Mikroprocesorski ( kontrolor leta
- Žiroskop - odgovoran je za stabilno ponašanje drona tijekom leta (u pravilu osigurava stabilizaciju duž 6 osi smjera).
- Akcelerometar - Ovaj senzor omogućuje procesoru postavljanje zrakoplova u vodoravan položaj u odnosu na tlo.
- Barometrijski senzor (barometar) - omogućuje dronu stabilno lebdenje na odabranoj visini pilota.
- Sonar (ultrazvučni senzor) - omogućuje automatsko slijetanje i zadržavanje male visine (1,5 - 3,5 metara), također se može koristiti za let oko prepreka.
- GPS modul - omogućuje geografsko pozicioniranje drona, koristeći podatke primljene sa satelitskih sustava. Zbog svoje prisutnosti ostvaruje se funkcija letenja po točkama, povratak na mjesto polijetanja u slučaju gubitka komunikacije ili niske napunjenosti baterije, a također vam omogućuje i mjerenje leta, kako u vrijeme leta, tako i nakon.
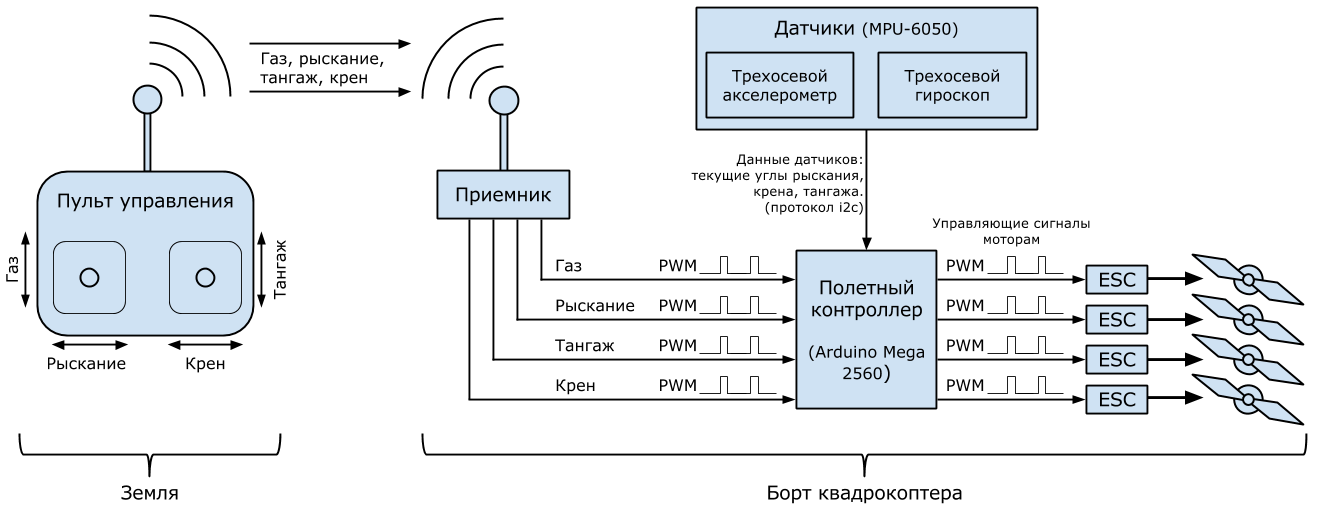
* Najjednostavnija shema uređaja za četverokopter.
Što su oni?
Trenutno, tržište bespilotnih letjelica za potrošače nudi ogroman broj multikoptera (dronova), ali općenito ih se može podijeliti u tri velike skupine: Za Početnike / Amatere / Profesionalno
Za početnike - prikladno i za djecu i za odrasle u svrhu prvog upoznavanja i učenja. U pravilu su opremljeni mikroprocesorom, 6-osnim žiroskopom i jednostavnim barometrijskim senzorom kako bi se osiguralo držanje nadmorske visine.
Amaterski - za pilote koji već imaju iskustva s bespilotnim letjelicama. Pogodnije za određenu primjenu. Na primjer, za snimanje iz zraka ili za sportove poput utrka dronovima. Bespilotne letjelice u ovoj skupini mogu imati autonomne funkcije leta i pregleda.
Profesionalno - Pogodno isključivo za iskusne pilote koji koriste sposobnosti višekoptera (bespilotnih letjelica) u profesionalnom području. Na primjer, profesionalno fotografiranje i video snimanje, geodezija, praćenje zemljišta, prometa, u akcijama spašavanja itd. U većini slučajeva bespilotne letjelice imaju autonomne funkcije leta i pregleda. Elektroničko punjenje sastavljeno je od modernih sustava visoke preciznosti koji omogućuju uklanjanje na velike udaljenosti, a napajanje vam omogućuje da provedete mnogo više vremena u letu. Karakteristična razlika među takvim multikopterima je njihova cijena.
Za potpunije upoznavanje sustava bez posade, preporučujemo temu "Što je bespilotna letjelica?"
.






