쿼드콥터란 무엇입니까?
쿼드로콥터는 멀티콥터의 일종이다. 멀티콥터는 메인 로터가 반대 방향으로 대각선으로 회전하는 다중 엔진 또는 다중 로터 항공기(헬리콥터)입니다. 멀티콥터는 모터 수(또는 로터 수)에 따라 다릅니다. 최근에는 로터가 3개 이상인 멀티콥터가 사용됩니다.
가장 일반적인 방식은 4/6/8 로터입니다. 3개의 로터 프로펠러가 있는 장치를 트라이콥터라고 합니다. 4개 포함 - 쿼드콥터 6개 - 헥사콥터와 8개 로터 - 옥토콥터. 각 구성표의 사용은 주로 페이로드의 질량 또는 더 간단하게는 멀티콥터가 탑재할 수 있는 무게와 같은 매개변수를 결정합니다.
최신 멀티 로터 솔루션의 예.
다양한 가격대의 최신 멀티 로터 솔루션:




역사에서
이 모든 것은 1922년 러시아계 미국인 항공기 설계자인 Georgy Aleksandrovich Botezat와 함께 시작되었습니다. 최초로 작동하는 쿼드콥터를 발명한 사람. 그의 장치는 땅에서 떨어질 뿐만 아니라 얼마 동안 공중에서 버틸 수 있었습니다. 그 당시 이러한 장치에는 작동 원리라는 중요한 단점이 있었습니다.

4개의 로터 중 1개만 선행 로터(회전은 내연 기관에 의해 설정됨), 즉 복잡한 변속기를 통한 토크는 하나의 모터에서 다른 3개의 메인 로터로 전달되었습니다. 그것은 직렬 개발에 오지 않았습니다. 그리고 "테일 로터"와 "스와시 플레이트"와 같은 발명은 멀티 로터 항공기 개발을 완전히 포기해야했고 나중에 세계 최초의 헬리콥터가 만들어졌습니다.
21세기의 도래와 함께 멀티콥터는 무인항공기나 드론으로 우리 생활에 들어왔다.
멀티콥터의 주요 구성요소
기술적으로 약 5년 전에 멀티콥터(드론)의 3가지 주요 구성요소가 등장했습니다.
- 배터리 - 리튬 폴리머(LiPo), 덜 자주 리튬 이온(Li-Ion).
- 브러시리스 또는 브러시된 희토류 모터.
- 조종기(제어판/하드웨어/송신기)

작동 원리
현대식 멀티콥터의 작동 원리는 다음과 같습니다. 단순한. 적용 방식(3/4/6/8-rotor)에 따라 각 로터는 전기 모터(전기 모터)로 구동됩니다. 모터의 절반은 나사를 시계 방향으로 돌리고 나머지 절반은 시계 반대 방향으로 돌립니다. 이 접근 방식 덕분에 멀티콥터를 제어하기 위해 드론 설계에 테일 로터와 복잡한 사판을 사용할 필요가 없습니다.
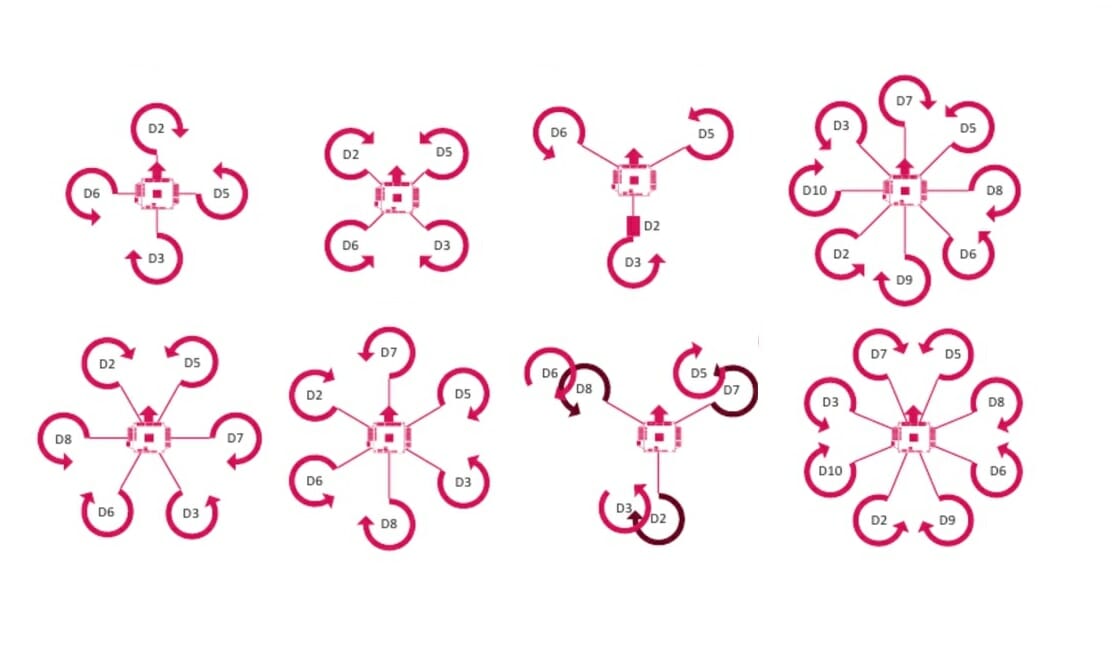
* 멀티콥터 로터의 회전 방향 순서.
비행 제어의 예:
- 모든 로터의 RPM 증가 - 리프팅.
- 모든 로터의 속도 감소 - 감소.
- 나사의 절반은 회전수를 늘리고 나머지 절반은 회전을 줄이면 이동이 옆으로 이동합니다.
- 시계방향 프로펠러의 RPM을 높이고 반시계방향 프로펠러의 RPM을 낮추면 드론이 회전합니다.
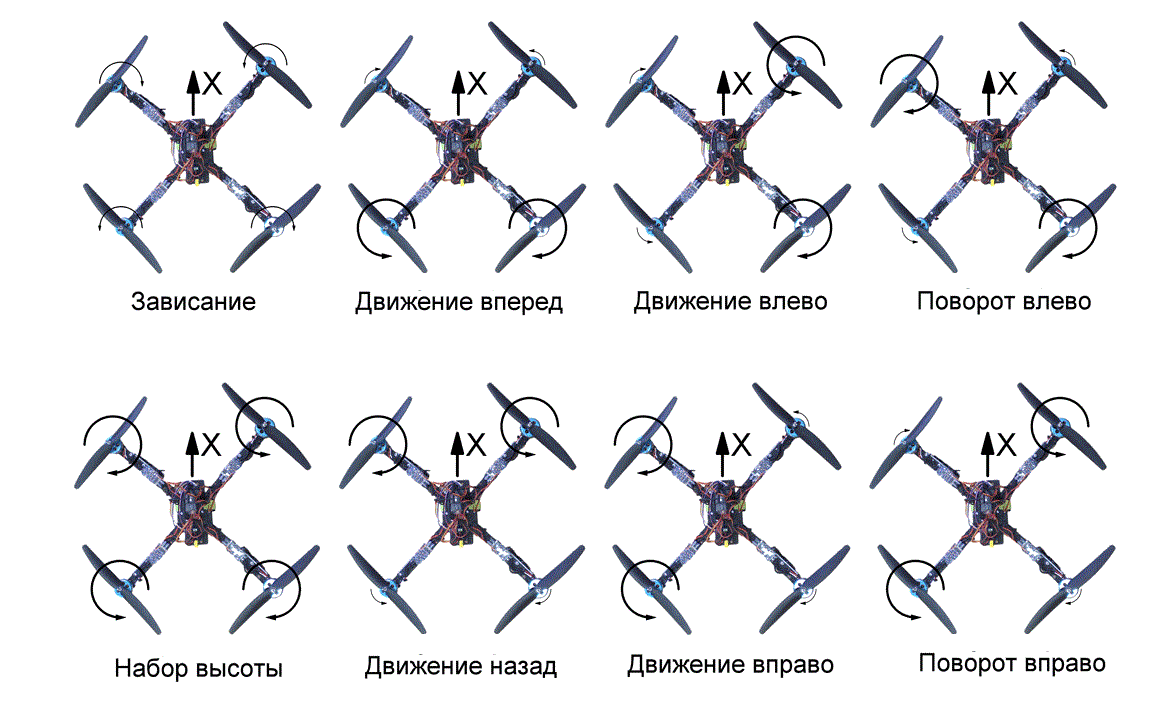
* 로터의 회전을 위한 비행 제어 방식.
모터
현재 현대식 멀티콥터(드론)에는 브러시 및 브러시리스의 두 가지 유형의 전기 모터가 사용됩니다. 브러시리스 드론에는 주로 고가의 전문 드론이 탑재된다. 예산 옵션과 장난감에만 수집기 모터가 장착되어 있습니다. 차이점에 대한 자세한 내용은 여기 에서 찾을 수 있습니다 .

제어
멀티콥터는 발신 전파(일반적으로, 주파수 2.4GHz 또는 5.8GHz ).
멀티콥터가 컨트롤 패널 요청에 응답하도록 하기 위해 드론에는 전자 시스템의 전체 복합체가 장착되어 있습니다.
- 마이크로프로세서( 비행 컨트롤러
- 자이로스코프 - 비행 중 드론의 안정적인 동작을 담당합니다(일반적으로 6방향 축을 따라 안정화 제공).
- 가속도계 - 이 센서를 사용하면 프로세서가 지면을 기준으로 수평 위치에 항공기를 배치할 수 있습니다.
- 기압 센서(기압계) - 조종사가 선택한 고도에서 드론에 안정적인 호버링을 제공합니다.
- 소나(초음파 센서) - 자동 착륙을 제공하고 작은 높이(1.5~3.5미터)를 유지하며 장애물 주위를 비행하는 데 사용할 수도 있습니다.
- GPS 모듈 - 위성 시스템에서 수신한 데이터를 사용하여 드론의 지리적 위치를 제공합니다. 그것의 존재로 인해 포인트로 비행하는 기능이 실현되어 통신이 두절되거나 배터리가 부족한 경우 이륙 장소로 돌아갑니다. 또한 비행 시간과 비행 후에 비행 판독을 할 수 있습니다..
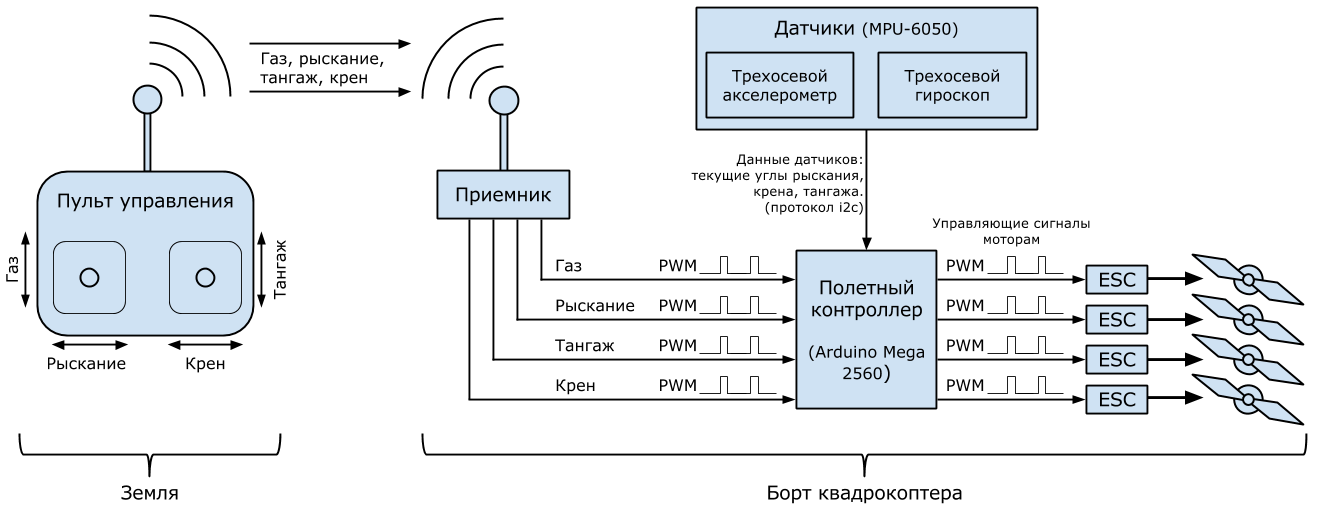
* 쿼드로콥터 장치의 가장 간단한 방식.
그들은 무엇입니까?
현재 소비자용 드론 시장은 수많은 멀티콥터(드론)를 제공하고 있지만 일반적으로 초보자용 / 아마추어 세 그룹으로 나눌 수 있습니다. / 전문가
초심자용 - 첫 만남과 배움을 목적으로 어린이와 성인 모두에게 적합하다. 일반적으로 고도 유지를 보장하기 위해 마이크로프로세서, 6축 자이로스코프 및 간단한 기압 센서가 장착되어 있습니다.
아마추어 - 이미 UAV에 대한 경험이 있는 조종사를 위한 것입니다. 특정 용도에 더 적합합니다. 예를 들어, 항공 사진이나 드론 경주 와 같은 스포츠를 위해. 이 그룹의 드론은 자율 비행 및 측량 기능을 가질 수 있습니다.
전문가 - 전문 분야에서 멀티콥터(드론)의 능력을 사용하는 숙련된 조종사에게만 적합합니다. 예를 들어, 전문적인 사진 및 비디오 촬영, 측지, 토지, 교통 모니터링, 구조 작업 등 대부분의 경우 드론에는 자율 비행 및 측량 기능이 있습니다. 전자 충전은 장거리에 걸쳐 제거를 제공하는 고정밀 현대식 시스템에서 조립되며 전원 공급 장치를 사용하면 비행 중에 훨씬 더 많은 시간을 보낼 수 있습니다. 이러한 멀티콥터의 특징적인 차이점은 가격입니다.
무인시스템에 대한 보다 완전한 이해를 위해서는 "드론이란?" 주제를 추천한다.
.






