정의
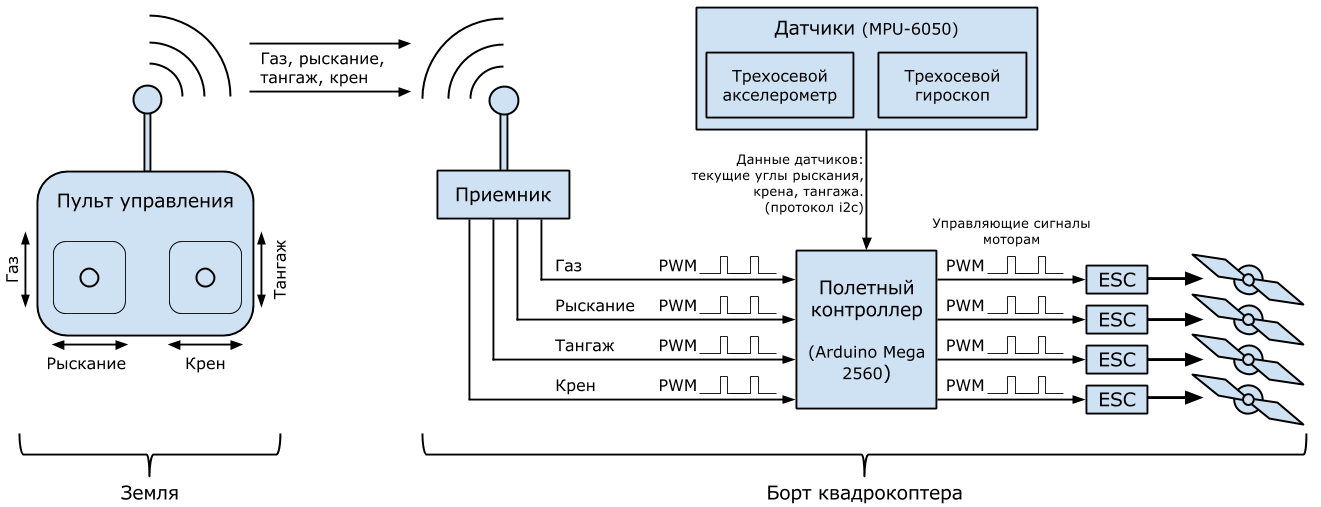
비행 컨트롤러(일명: 브레인, 플라이트 보드, 컴퓨터, 컨트롤러)는 헬리콥터가 스로틀, 피치, 롤, 요를 제어하여 비행할 수 있도록 하는 장치입니다.

기능
일반적으로 비행 컨트롤러는 다음과 같은 기능을 수행합니다.
- 센서(내장 또는 외부: 나침반, GPS, 자이로스코프 등)에서 정보를 수집합니다.
- 센서에 따라 공간에서 위치를 설정/계산합니다.
- 외부 제어 동작(파일럿에 의한 스틱 편향 또는 프로그램/자동 조종 장치 알고리즘의 다음 단계)에 대한 정보를 수집합니다.
- 자동 조종 장치 또는 수동 제어의 펌웨어/프로그램에 따라 불일치 및 PID(Proportional-Integral-Differential) 계수를 계산합니다.
- 제어/수정 신호를 액츄에이터(속도 컨트롤러로)로 보냅니다.
작동 원리
비행 컨트롤러는 펄스 폭 변조(PWM)를 사용하여 조속기에 명령을 내립니다. 여기서 조속기 모드는 펄스 지속 시간에 의해 설정되거나 레귤레이터 모드가 디지털 신호로 설정되는 집적 회로(IIC / I2C): 첫 번째는 장치 주소를 정의하고 두 번째는 0에서 255 사이의 값을 설정합니다. PWM 방법이 가장 자주 사용됩니다.
그들은 무엇입니까?
MultiWii, Ardupilot, 3DRobotics(Pixhawk), HoverFly Pro(OpenPilot 및 CopterControl), CopterControl3D(CC3D Rabbit Flight Controller), Mikrokopter 등과 같은 다양한 제조업체의 비행 컨트롤러가 널리 사용됩니다. "오픈 코드"는 헬리콥터 제어를 위한 자체 프로그램/펌웨어 작성까지 비행 컨트롤러의 모든 매개변수를 변경할 수 있는 소프트웨어 기능을 의미합니다. 그러한 "두뇌"의 품질과 비용은 일반적으로 더 낮고 실험의 기회는 오류의 기회와 마찬가지로 비교할 수 없을 정도로 더 큽니다.
어느 것이 더 낫습니까?
간단한 규칙이 있습니다. 즉, 비행 컨트롤러가 더 비쌀수록 멀티콥터가 더 안정적이고 신뢰할 수 있습니다. 사실 주요 제조업체는 구성 및 관리를 위해 고품질 하드웨어 구성 요소와 고품질 소프트웨어를 사용합니다. 이러한 제조업체에는 Naza-M V2 컨트롤러가 있는 DJI, 라이트 버전인 NAZA-M Lite, 전문 WooKong-M 및 A2가 포함됩니다.

장점 중 주목해야 할 사항은 다음과 같습니다. 필요한 장치 및 관련 주변기기를 연결하기 위한 커넥터의 위치가 다소 편리합니다. 커넥터의 신뢰성; 외부 영향으로부터 보호하기 위한 플라스틱 케이스. 또한 발전소 작동 중 필연적으로 발생하는 비행 컨트롤러 케이스의 유해한 진동으로부터 보드에 위치한 민감한 센서를 보호하기 위해 진동 차단 기능이 내장되어 있습니다. 따라서 이것이 "즉시"비행을 위해 최대한 준비된 완제품이라고 말할 수 있습니다.
거의 모든 "유명한" 컨트롤러에는 사본이 있으며, 때로는 다소 좋은 품질이 있어 예를 들어 백업 장치를 구축할 때 무관심할 수 없습니다. 어떤 식으로든 이 선택은 일련의 "종교적" 선택일 가능성이 더 큽니다. 어쨌든 비행 컨트롤러를 선택할 때 이것이 시스템의 "두뇌"이며 비행할 때 가장 중요한 것은 안전(그리고 탐욕은 두 번 지불)이라는 것을 기억하십시오.
.






