Wat is een quadcopter?
Een quadrocopter is een soort multicopter. Een multicopter is een meermotorig of multi-rotor vliegtuig (helikopter), waarvan de hoofdrotor diagonaal in tegengestelde richtingen roteert. Multicopters verschillen door het aantal motoren (of door het aantal rotoren). Tegenwoordig zijn multicopters met drie of meer rotoren gebruikt.
De meest voorkomende schema's zijn: 4/6/8 rotoren. Een apparaat met drie rotorpropellers wordt een tricopter genoemd; met vier - een quadcopter; met zes - een hexacopter en met acht rotors - een octocopter. Het gebruik van elk van de schema's bepaalt voornamelijk een parameter als - de massa van de lading, of, eenvoudiger, het gewicht dat de multicopter aan boord kan nemen.
Voorbeelden van moderne multi-rotor oplossingen.
Moderne multi-rotoroplossingen uit verschillende prijsniches:




Uit de geschiedenis
Het begon allemaal in 1922 met de Russisch-Amerikaanse vliegtuigontwerper Georgy Aleksandrovich Botezat. Wie heeft de eerste in zijn soort werkende quadcopter uitgevonden. Zijn apparaat kon niet alleen van de grond komen, maar ook enige tijd in de lucht standhouden. In die tijd hadden dergelijke apparaten één belangrijk nadeel: het werkingsprincipe.

Van de vier rotoren was er slechts één de leidende (rotatie werd ingesteld door de verbrandingsmotor), d.w.z. koppel via een complexe transmissie werd door de ene motor overgebracht op de andere 3 hoofdrotor. Het kwam niet tot seriële ontwikkeling. En uitvindingen als de "Tail rotor" en "Swashplate" dwongen de ontwikkeling van multi-rotor vliegtuigen volledig te verlaten, later werd 's werelds eerste helikopter gemaakt.
Met de komst van de 21e eeuw zijn multicopters in ons leven gekomen als onbemande luchtvaartuigen of drones.
Hoofdcomponenten van multicopters
Technisch gezien verschenen ongeveer 5 jaar geleden drie hoofdcomponenten van multicopters (drones):
- Batterij - lithiumpolymeer (LiPo), minder vaak lithium-ion (Li-Ion).
- Borstelloze of geborstelde zeldzame aarde motoren.
- Afstandsbediening (bedieningspaneel / hardware / zender)

Werkingsprincipe
Het werkingsprincipe van een moderne multicopter is eenvoudig. Afhankelijk van het toepassingsschema (3/4/6/8-rotor) wordt elke rotor aangedreven door een elektromotor (elektromotor). De ene helft van de motoren draait de schroeven met de klok mee en de andere helft tegen de klok in. Dankzij deze aanpak, om de multicopter te besturen, is het gebruik van een staartrotor en een complexe tuimelschijf niet vereist bij het ontwerp van de drone.
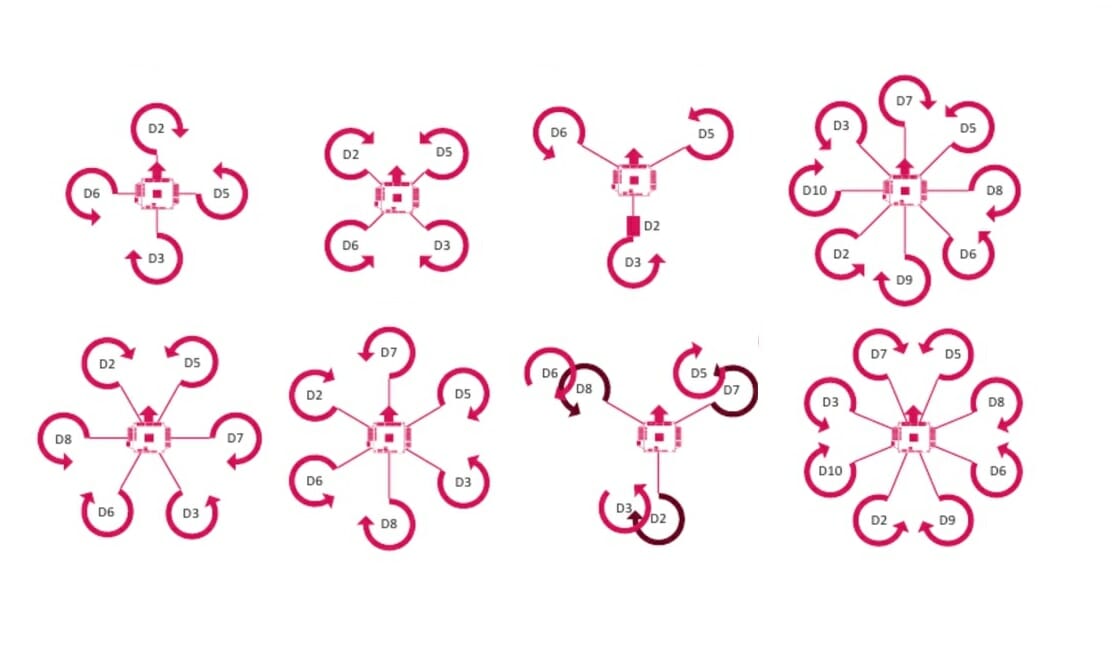
* De volgorde van de draairichting van de multicopterrotor.
Een voorbeeld van vluchtbesturing:
- Toenemend toerental op alle rotoren - heffen.
- Verlaging van het toerental op alle rotoren - verlagen.
- Het verhogen van de omwentelingen van de ene helft van de schroeven en het verlagen van de omwentelingen van de andere helft zal de beweging opzij zetten.
- Door het toerental voor de propellers met de klok mee te verhogen en het toerental voor de propellers tegen de klok in te verlagen, zal de drone draaien.
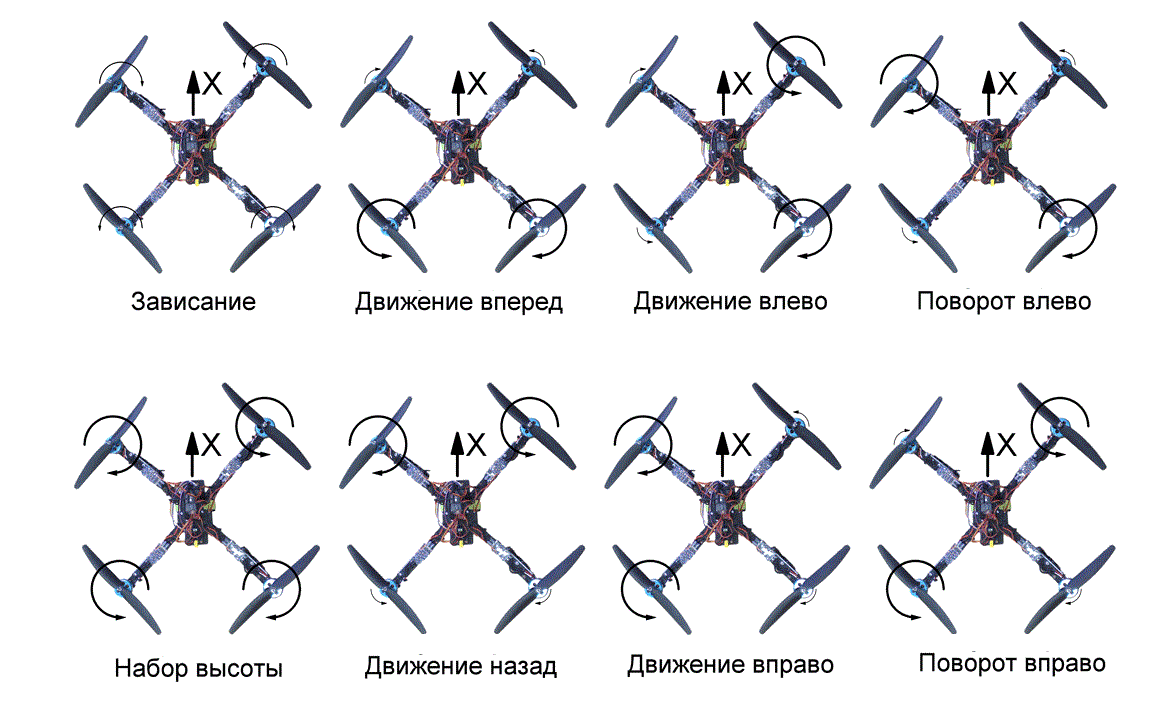
* Vluchtregelschema voor de rotatie van de rotoren.
Motoren
Op moderne multicopters (drones) worden momenteel twee typen elektromotoren gebruikt: brushed en brushless. Borstelloze drones zijn voornamelijk uitgerust met dure en professionele drones. Alleen budgetopties en speelgoed zijn uitgerust met collectormotoren. Meer details over hun verschillen vindt u hier

Besturing
De multicopter wordt bestuurd door een afstandsbediening (ook bekend als afstandsbediening, apparatuur, zender ) via uitgaande radiogolven (meestal op frequenties 2,4 GHz of 5,8 GHz ).
Om de multicopter te laten reageren op de verzoeken van het controlepaneel, is de drone uitgerust met een heel complex van elektronische systemen:
- Microprocessor ( vluchtcontroller
- Gyroscoop - is verantwoordelijk voor het stabiele gedrag van de drone tijdens de vlucht (in de regel zorgt het voor stabilisatie langs 6 richtingsassen).
- Versnellingsmeter - Met deze sensor kan de processor het vliegtuig in een horizontale positie ten opzichte van de grond plaatsen.
- Barometrische sensor (barometer) - geeft de drone een stabiele hover op de door de piloot geselecteerde hoogte.
- Sonar (ultrasone sensor) - zorgt voor automatische landing en behoud van een kleine hoogte (1,5 - 3,5 meter), kan ook worden gebruikt om rond obstakels te vliegen.
- GPS-module - biedt de geografische positionering van de drone, met behulp van gegevens die zijn ontvangen van satellietsystemen. Door zijn aanwezigheid wordt de functie van vliegen op punten gerealiseerd, terugkeren naar de startplaats in geval van communicatieverlies of lage batterijlading, en kunt u ook vluchtmetingen doen, zowel tijdens als na de vlucht.
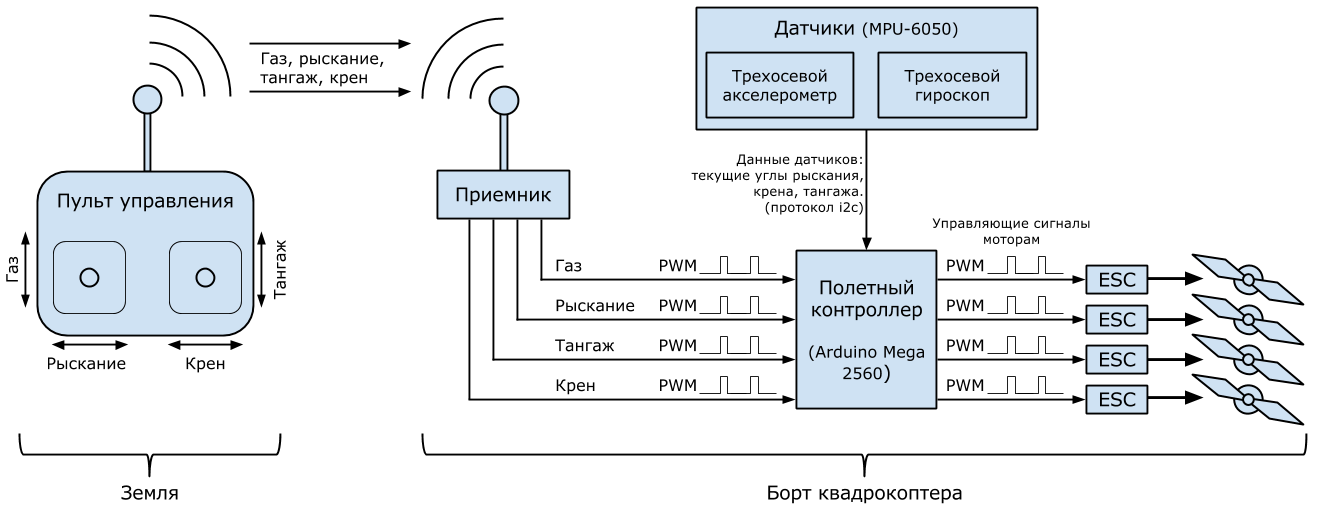
* Het eenvoudigste schema van een quadrocopter-apparaat.
Wat zijn dat?
Momenteel biedt de dronemarkt voor consumenten een enorm aantal multicopters (drones), maar over het algemeen kunnen ze in drie grote groepen worden verdeeld: Voor Beginners / Amateur / Professioneel
Voor beginners - geschikt voor zowel kinderen als volwassenen voor eerste kennismaking en leren. In de regel zijn ze uitgerust met een microprocessor, een 6-assige gyroscoop en een eenvoudige barometrische sensor om de hoogte vast te houden.
Amateur - voor piloten die al ervaring hebben met UAV's. Meer geschikt voor een specifieke toepassing. Bijvoorbeeld voor luchtfotografie, of voor sporten zoals droneracen. Drones in deze groep kunnen autonome vlucht- en onderzoeksfuncties hebben.
Professioneel - Uitsluitend geschikt voor ervaren piloten die de mogelijkheden van multicopters (drones) in het professionele veld gebruiken. Bijvoorbeeld professionele foto- en video-opnamen, geodesie, monitoring van land, verkeer, bij reddingsoperaties, enz. In de meeste gevallen hebben drones autonome vlucht- en onderzoeksfuncties. De elektronische vulling is samengesteld uit uiterst nauwkeurige moderne systemen die verwijdering over lange afstanden mogelijk maken, en de stroomvoorziening stelt u in staat om veel meer tijd tijdens de vlucht door te brengen. Het kenmerkende verschil tussen dergelijke multicopters is hun prijs.
Voor een meer volledige kennismaking met onbemande systemen raden we onderwerp "Wat is een drone?"
.






