Apa itu quadcopter?
Quadrocopter adalah sejenis multicopter. Multicopter adalah pesawat multi-mesin atau multi-rotor (helikopter), rotor utama yang berputar secara diagonal dalam arah yang berlawanan. Multicopters berbeda dengan jumlah motor (atau jumlah rotor). Saat ini, multicopters dengan tiga atau lebih rotor telah digunakan.
Skema yang paling umum adalah: 4/6/8 rotor. Peralatan dengan tiga baling-baling rotor disebut tricopter; dengan empat - quadcopter; dengan enam - hexacopter dan dengan delapan rotor - octocopter. Penggunaan masing-masing skema terutama menentukan parameter seperti - massa muatan, atau, lebih sederhana, berat yang dapat dibawa oleh multicopter.
Contoh solusi multi-rotor modern.
Solusi multi-rotor modern dari ceruk harga yang berbeda:




Dari sejarah
Semuanya dimulai kembali pada tahun 1922 dengan desainer pesawat Rusia-Amerika Georgy Aleksandrovich Botezat. Siapa yang menemukan quadcopter kerja pertama dari jenisnya. Aparatnya tidak hanya mampu turun dari tanah, tetapi juga bertahan di udara selama beberapa waktu. Pada saat itu, perangkat tersebut memiliki satu kelemahan signifikan - prinsip operasi.

Dari empat rotor, hanya satu yang terdepan (rotasi diatur oleh mesin pembakaran internal), yaitu. torsi melalui transmisi kompleks ditransmisikan oleh satu motor ke 3 rotor utama lainnya. Itu tidak datang ke pengembangan serial. Dan penemuan seperti "Rotor ekor" dan "Swashplate" dipaksa untuk sepenuhnya meninggalkan pengembangan pesawat multi-rotor, kemudian, helikopter pertama di dunia diciptakan.
Dengan munculnya abad ke-21, multicopters telah datang ke dalam kehidupan kita sebagai kendaraan udara tak berawak atau drone.
Komponen utama multicopters
Secara teknis, sekitar 5 tahun yang lalu, tiga komponen utama multicopters (drone) muncul:
- Baterai - lithium polymer (LiPo), lebih jarang lithium-ion (Li-Ion).
- Brushless atau motor tanah jarang yang disikat.
- Pengendali jarak jauh (Panel Kontrol / Perangkat Keras / Pemancar)

Prinsip pengoperasian
Prinsip pengoperasian multicopter modern adalah sederhana. Tergantung pada skema aplikasi (3/4/6/8-rotor), setiap rotor digerakkan oleh motor listrik (motor listrik). Setengah dari motor memutar sekrup searah jarum jam, dan setengah lainnya berlawanan arah jarum jam. Berkat pendekatan ini, untuk mengontrol multicopter, penggunaan rotor ekor dan pelat swashplate yang rumit tidak diperlukan dalam desain drone.
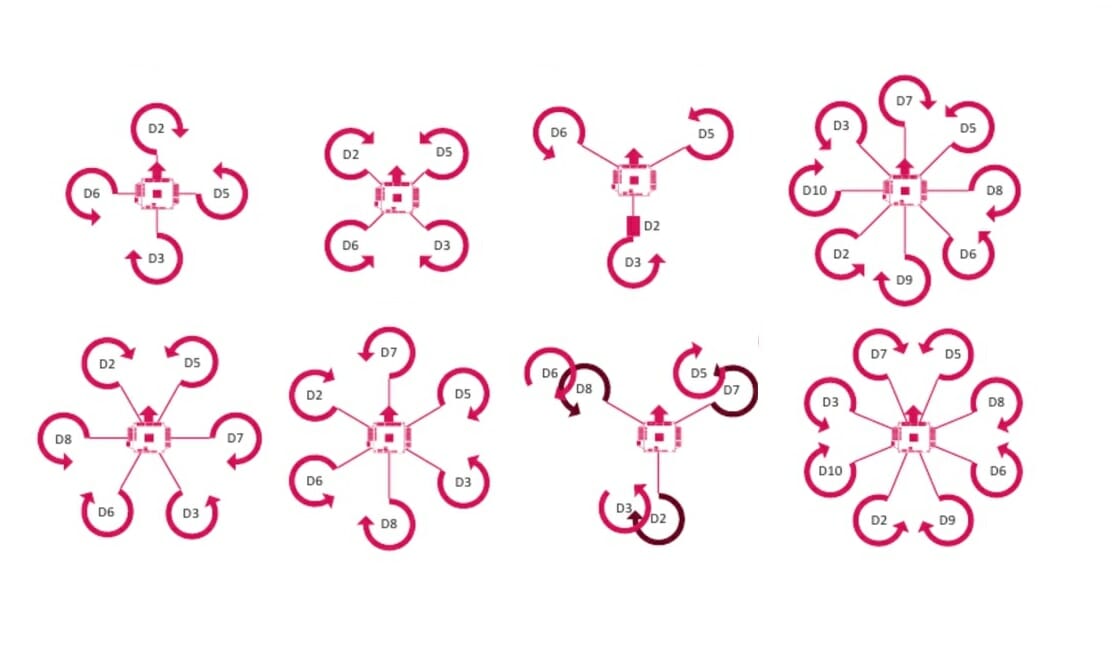
* Urutan arah putaran rotor multicopter.
Contoh kontrol penerbangan:
- Meningkatkan RPM pada semua rotor - pengangkatan.
- Penurunan kecepatan pada semua rotor - penurunan.
- Meningkatkan putaran setengah sekrup dan mengurangi putaran setengah lainnya akan mengatur gerakan ke samping.
- Meningkatkan RPM untuk baling-baling searah jarum jam dan mengurangi RPM untuk baling-baling berlawanan arah jarum jam akan memutar drone.
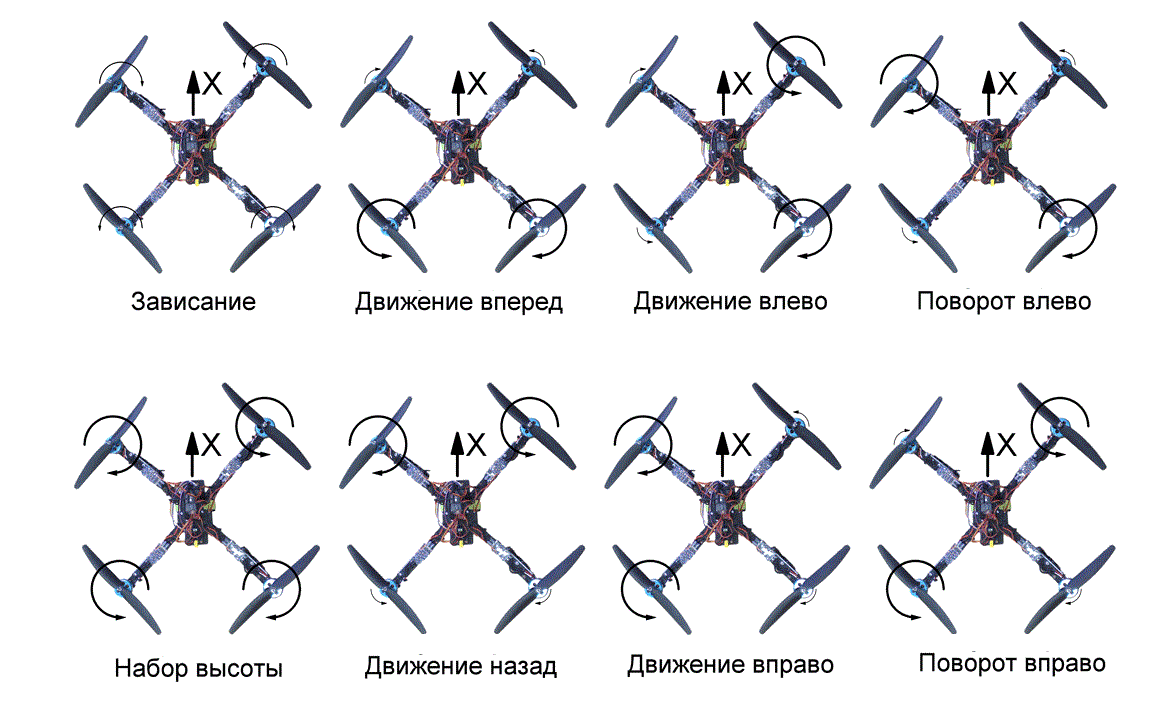
* Skema kontrol penerbangan untuk rotasi rotor.
Motors
Dua jenis motor listrik saat ini digunakan pada multicopters (drone) modern - disikat dan tanpa sikat. Drone brushless terutama dilengkapi dengan drone mahal dan profesional. Hanya opsi anggaran dan mainan yang dilengkapi dengan motor kolektor. Rincian lebih lanjut tentang perbedaan mereka dapat ditemukan di sini

Kontrol
Multicopter dikendalikan oleh remote kontrol (alias panel kontrol, peralatan, pemancar ) melalui gelombang radio keluar (biasanya, pada frekuensi 2.4GHz atau 5.8GHz ).
Untuk membuat multicopter menanggapi permintaan panel kontrol, drone dilengkapi dengan seluruh kompleks sistem elektronik:
- Mikroprosesor ( pengontrol penerbangan
- Giroskop - bertanggung jawab atas perilaku stabil drone selama penerbangan (sebagai aturan, ini memberikan stabilisasi sepanjang 6 sumbu arah).
- Accelerometer - Sensor ini memungkinkan prosesor untuk memposisikan pesawat dalam posisi horizontal relatif terhadap tanah.
- Sensor barometrik (barometer) - menyediakan drone dengan hover yang stabil di ketinggian yang dipilih pilot.
- Sonar (sensor ultrasonik) - menyediakan pendaratan otomatis dan menjaga ketinggian kecil (1,5 - 3,5 meter), juga dapat digunakan untuk terbang di sekitar rintangan.
- modul GPS - menyediakan posisi geografis drone, menggunakan data yang diterima dari sistem satelit. Karena keberadaannya, fungsi terbang dengan poin diwujudkan, kembali ke lokasi lepas landas jika terjadi kehilangan komunikasi, atau daya baterai rendah, dan juga memungkinkan Anda untuk melakukan pembacaan penerbangan, baik pada saat penerbangan maupun setelahnya..
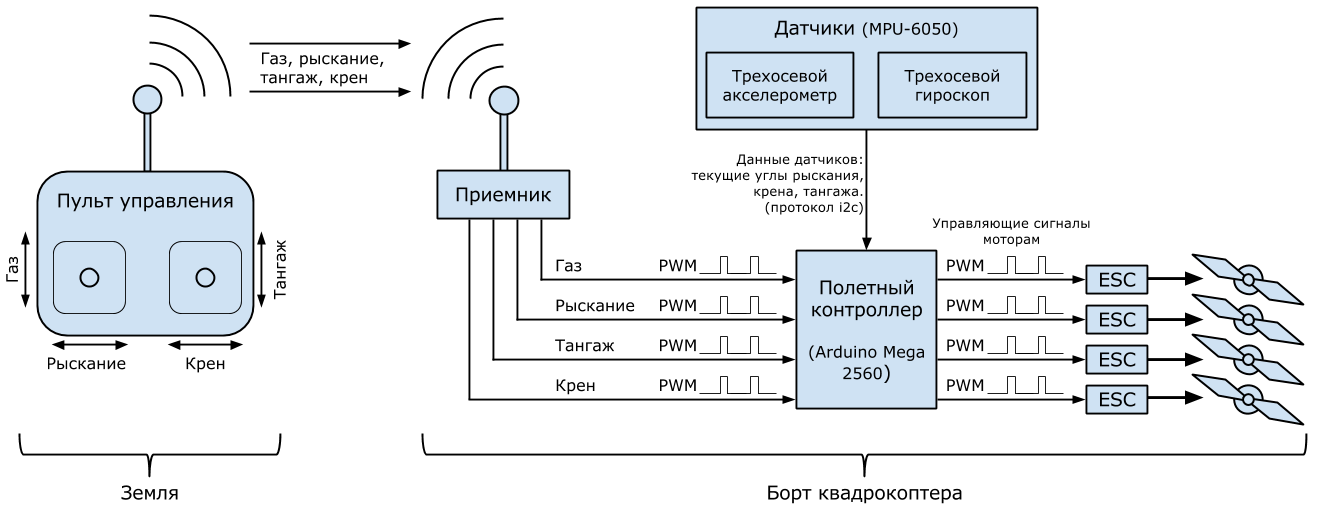
* Skema paling sederhana dari perangkat quadrocopter.
Apa itu?
Saat ini, pasar drone konsumen menawarkan sejumlah besar multicopters (drone), tetapi secara umum mereka dapat dibagi menjadi tiga kelompok besar: Untuk Pemula / Amatir / Profesional
Untuk pemula - cocok untuk anak-anak dan orang dewasa untuk tujuan pengenalan dan pembelajaran pertama. Biasanya, mereka dilengkapi dengan mikroprosesor, giroskop 6-sumbu, dan sensor barometrik sederhana untuk memastikan penahanan ketinggian.
Amatir - untuk pilot yang sudah memiliki pengalaman dengan UAV. Lebih cocok untuk aplikasi tertentu. Misalnya untuk foto udara, atau untuk olahraga seperti drone racing. Drone dalam kelompok ini dapat memiliki fungsi penerbangan dan survei otonom.
Profesional - Cocok secara eksklusif untuk pilot berpengalaman yang menggunakan kemampuan multicopter (drone) di bidang profesional. Misalnya, pemotretan foto dan video profesional, geodesi, pemantauan tanah, lalu lintas, dalam operasi penyelamatan, dll. Dalam kebanyakan kasus, drone memiliki fungsi penerbangan dan survei otonom. Pengisian elektronik dirakit dari sistem modern presisi tinggi yang menyediakan pemindahan jarak jauh, dan catu daya memungkinkan Anda menghabiskan lebih banyak waktu dalam penerbangan. Perbedaan karakteristik antara multicopters tersebut adalah harganya.
Untuk pengenalan yang lebih lengkap dengan sistem tak berawak, kami merekomendasikan topik "Apa itu drone?"
.






