¿Qué es un quadcopter?
Un cuadricóptero es una especie de multicóptero. Un multicóptero es un avión multimotor o multirrotor (helicóptero), cuyo rotor principal gira en diagonal en direcciones opuestas. Los multicópteros se diferencian por el número de motores (o por el número de rotores). Hoy en día se han utilizado multicópteros con tres o más rotores.
Los esquemas más comunes son: 4/6/8 rotores. Un aparato con tres hélices de rotor se llama tricóptero; con cuatro - un quadcopter; con seis, un hexacóptero y con ocho rotores, un octocóptero. El uso de cada uno de los esquemas determina principalmente un parámetro como: la masa de la carga útil o, más simplemente, el peso que el multicóptero puede llevar a bordo.
Ejemplos de soluciones modernas de múltiples rotores.
Soluciones modernas de múltiples rotores de diferentes nichos de precios:




De la historia
Todo comenzó en 1922 con el diseñador de aviones ruso-estadounidense Georgy Aleksandrovich Botezat. Quién inventó el primer cuadricóptero funcional de este tipo. Su aparato no solo pudo despegar del suelo, sino también mantenerse en el aire durante algún tiempo. En ese momento, tales dispositivos tenían un inconveniente importante: el principio de funcionamiento.

De los cuatro rotores, solo uno era el principal (la rotación la establecía el motor de combustión interna), es decir, El par a través de una transmisión compleja fue transmitido por un motor a los otros 3 rotores principales. No llegó al desarrollo en serie. Y inventos como el "rotor de cola" y el "plato cíclico" obligaron a abandonar por completo el desarrollo de aviones multirrotor, más tarde, se creó el primer helicóptero del mundo.
Con la llegada del siglo XXI, los multicópteros han llegado a nuestras vidas como vehículos aéreos no tripulados o drones.
Componentes principales de multicópteros
Técnicamente, hace unos 5 años, aparecieron tres componentes principales de multicópteros (drones):
- Batería - polímero de litio (LiPo), con menos frecuencia de iones de litio (Li-Ion).
- Motores sin escobillas o de tierras raras con escobillas.
- Mando a distancia (Panel de control / Hardware / Transmisor)

Principio de funcionamiento
El principio de funcionamiento de un multicóptero moderno es sencillo. Dependiendo del esquema de aplicación (3/4/6/8-rotor), cada rotor es accionado por un motor eléctrico (motor eléctrico). La mitad de los motores gira los tornillos en sentido horario y la otra mitad en sentido antihorario. Gracias a este enfoque, para controlar el multicóptero, no se requiere el uso de un rotor de cola y un plato cíclico complejo en el diseño del dron.
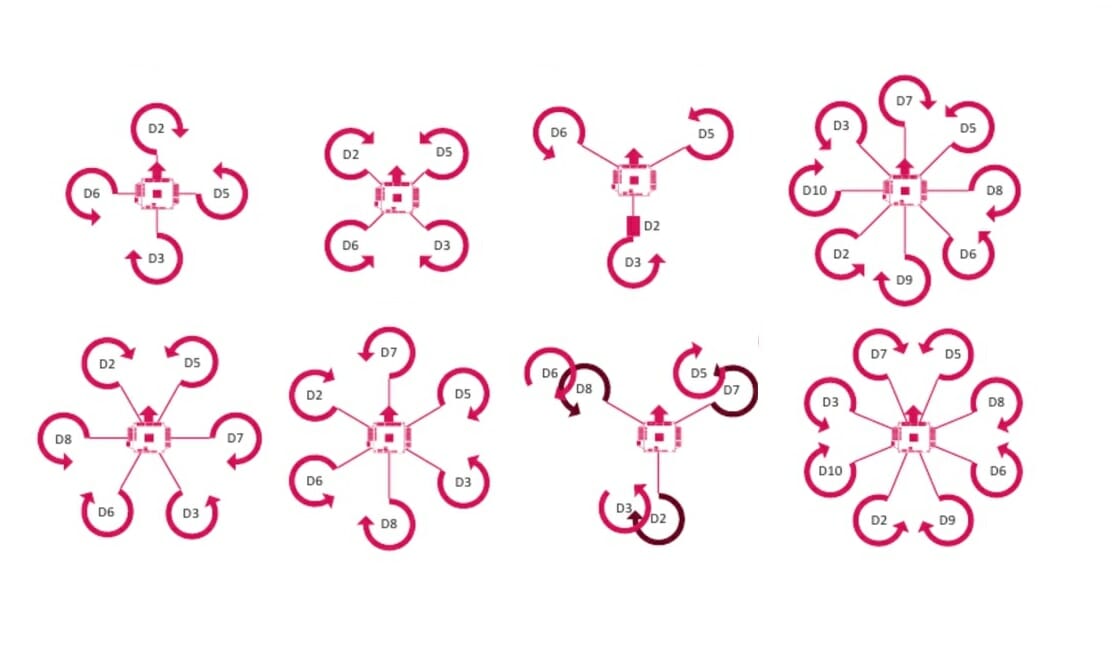
* El orden de la dirección de rotación del rotor multicóptero.
Un ejemplo de control de vuelo:
- Aumento de las RPM en todos los rotores: elevación.
- Disminución de la velocidad en todos los rotores - disminución.
- Aumentar las revoluciones de la mitad de los tornillos y disminuir las revoluciones de la otra mitad fijará el movimiento hacia un lado.
- Aumentar las RPM para las hélices en sentido horario y disminuir las RPM para las hélices en sentido antihorario hará girar el dron.
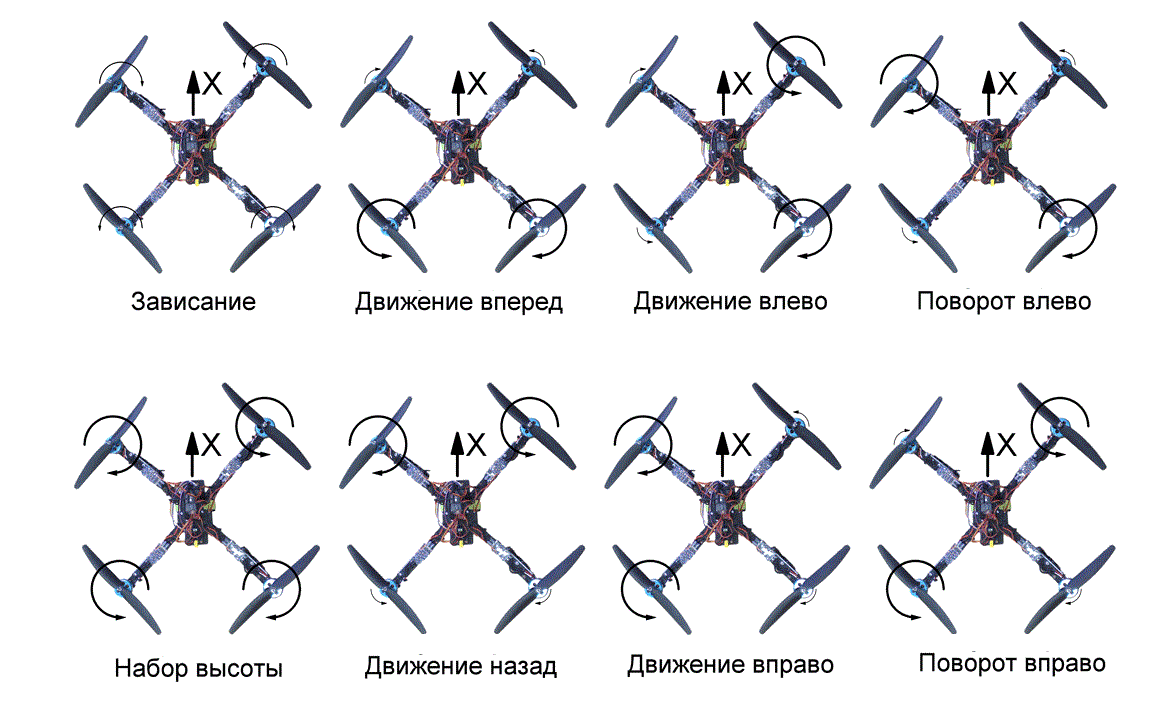
* Esquema de control de vuelo para la rotación de los rotores.
Motores
Actualmente se utilizan dos tipos de motores eléctricos en los multicópteros modernos (drones): cepillados y sin escobillas. Los drones sin escobillas están equipados principalmente con drones caros y profesionales. Solo las opciones económicas y los juguetes están equipados con motores colectores. Se pueden encontrar más detalles sobre sus diferencias aquí

Control
El multicóptero es controlado por un control remoto (también conocido como control remoto, equipo, transmisor ) a través de ondas de radio salientes (generalmente, a frecuencias 2,4 GHz o 5,8 GHz ).
Para que el multicóptero responda a las solicitudes del panel de control, el dron está equipado con todo un complejo de sistemas electrónicos:
- Microprocesador ( controlador de vuelo
- Giroscopio: es responsable del comportamiento estable del dron durante el vuelo (como regla, proporciona estabilización a lo largo de 6 ejes de dirección).
- Acelerómetro: este sensor permite que el procesador coloque la aeronave en una posición horizontal con respecto al suelo.
- Sensor barométrico (barómetro): proporciona al dron un vuelo estacionario estable a la altitud seleccionada por el piloto.
- Sonar (sensor ultrasónico): proporciona un aterrizaje automático y mantiene una pequeña altura (1,5 - 3,5 metros), también se puede utilizar para volar alrededor de obstáculos.
- Módulo GPS: proporciona el posicionamiento geográfico del dron, utilizando datos recibidos de sistemas satelitales. Debido a su presencia, se realiza la función de volar por puntos, regresando al sitio de despegue en caso de pérdida de comunicación, o baja carga de batería, y además permite tomar lecturas de vuelo, tanto en el momento del vuelo como después..
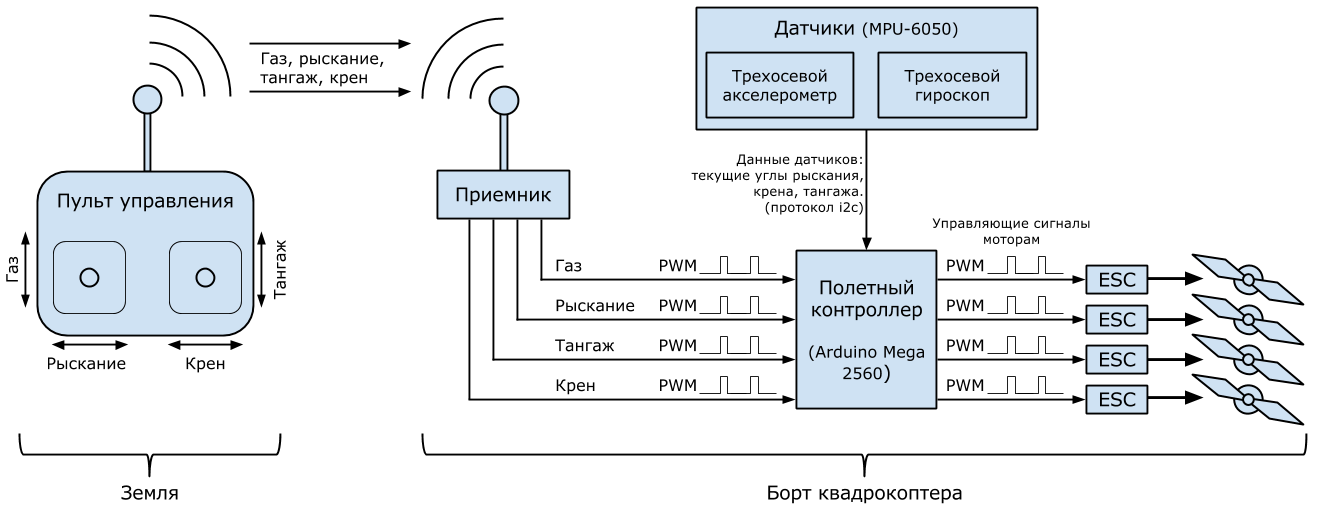
* El esquema más simple de un dispositivo cuadricóptero.
¿Qué son?
Actualmente, el mercado de drones de consumo ofrece una gran cantidad de multicópteros (drones), pero en general se pueden dividir en tres grandes grupos: Para Principiantes / Aficionados / Profesional
Para principiantes - adecuado tanto para niños como para adultos con el fin de conocer y aprender por primera vez. Por regla general, están equipados con un microprocesador, un giroscopio de 6 ejes y un sensor barométrico simple para garantizar el mantenimiento de la altitud.
Aficionado - para pilotos que ya tienen experiencia con UAV. Más adecuado para una aplicación específica. Por ejemplo, para fotografía aérea o para deportes como carreras de drones. Los drones de este grupo pueden tener funciones autónomas de vuelo y reconocimiento.
Profesional - Adecuado exclusivamente para pilotos experimentados que utilizan las capacidades de multicópteros (drones) en el campo profesional. Por ejemplo, toma de fotografías y videos profesionales, geodesia, monitoreo de tierra, tráfico, en operaciones de rescate, etc. En la mayoría de los casos, los drones tienen funciones autónomas de vuelo y reconocimiento. El llenado electrónico se ensambla a partir de sistemas modernos de alta precisión que permiten la extracción a largas distancias, y la fuente de alimentación le permite pasar mucho más tiempo en vuelo. La diferencia característica entre estos multicópteros es su precio.
Para un conocimiento más completo de los sistemas no tripulados, recomendamos el tema "¿Qué es un dron?"
.






