Qu'est-ce qu'un quadricoptère?
Un quadricoptère est une sorte de multicoptère. Un multicoptère est un avion multimoteur ou multirotor (hélicoptère), dont le rotor principal tourne en diagonale dans des directions opposées. Les multicoptères diffèrent par le nombre de moteurs (ou par le nombre de rotors). De nos jours, des multicoptères à trois rotors ou plus ont été utilisés.
Les schémas les plus courants sont: 4/6/8 rotors. Un appareil avec trois hélices de rotor s'appelle un tricopter; avec quatre - un quadricoptère; avec six - un hexacopter et avec huit rotors - un octocoptère. L'utilisation de chacun des schémas détermine fondamentalement un paramètre tel que - la masse de la charge utile ou, plus simplement, le poids que le multicoptère peut embarquer.
Exemples de solutions multi-rotors modernes.
Solutions multi-rotors modernes de différentes niches de prix:




De l'histoire
Tout a commencé en 1922 avec le concepteur d'avions russo-américain Georgy Aleksandrovich Botezat. Qui a inventé le premier quadricoptère fonctionnel du genre. Son appareil était capable non seulement de décoller du sol, mais aussi de tenir en l'air pendant un certain temps. À cette époque, de tels dispositifs présentaient un inconvénient majeur - le principe de fonctionnement.

Sur les quatre rotors, un seul était le principal (la rotation était réglée par le moteur à combustion interne), c'est-à-dire Le couple à travers une transmission complexe était transmis par un moteur aux 3 autres rotors principaux. Il n'est pas venu au développement en série. Et des inventions telles que "Tail rotor" et "Swashplate" ont forcé à abandonner complètement le développement d'avions multi-rotors, qui a ensuite été créé le premier hélicoptère au monde.
Avec l'avènement du 21e siècle, les multicoptères sont entrés dans nos vies en tant que véhicules aériens sans pilote ou drones.
Principaux composants des multicoptères
Techniquement, il y a environ 5 ans, trois composants principaux des multicoptères (drones) sont apparus:
- Batterie - lithium polymère (LiPo), moins souvent lithium-ion (Li-Ion).
- Moteurs sans balais ou en terres rares à balais.
- Télécommande (Panneau de commande / Matériel / Émetteur)

Principe de fonctionnement
Le principe de fonctionnement d'un multicoptère moderne est Facile. Selon le schéma d'application (3/4/6/8-rotor), chaque rotor est entraîné par un moteur électrique (moteur électrique). Une moitié des moteurs fait tourner les vis dans le sens des aiguilles d'une montre et l'autre moitié dans le sens inverse des aiguilles d'une montre. Grâce à cette approche, pour contrôler le multicoptère, l'utilisation d'un rotor de queue et d'un plateau cyclique complexe dans le drone n'est pas nécessaire.
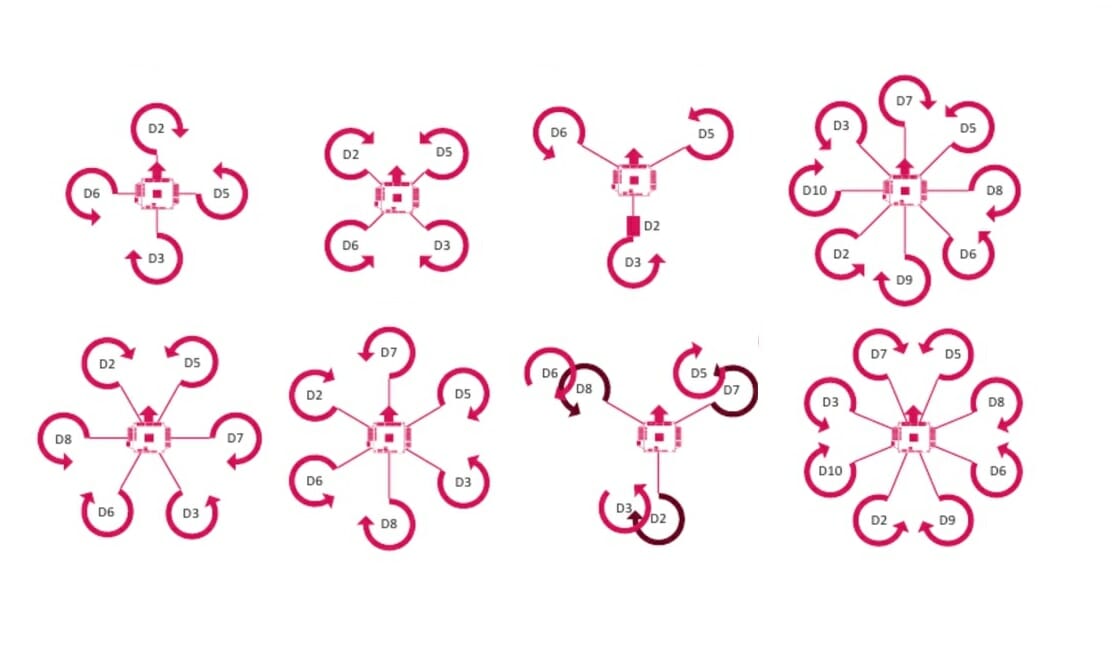
* L'ordre du sens de rotation du rotor du multicoptère.
Exemple de commande de vol:
- Augmenter le régime sur tous les rotors - portance.
- Diminution de la vitesse sur tous les rotors - diminution.
- L'augmentation des tours d'une moitié des vis et la diminution des tours de l'autre moitié décaleront le mouvement.
- L'augmentation du régime des hélices dans le sens des aiguilles d'une montre et la diminution du régime des hélices dans le sens inverse des aiguilles d'une montre feront tourner le drone.
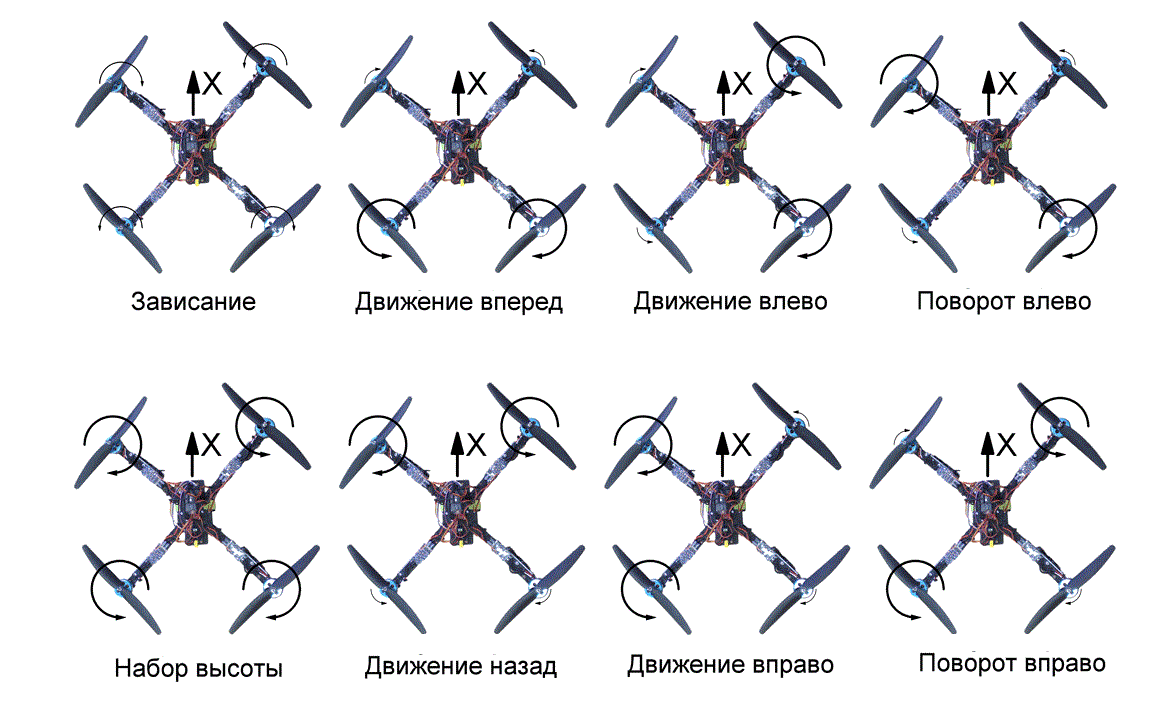
* Schéma de commande de vol pour la rotation des rotors.
Moteurs
Deux types de moteurs électriques sont actuellement utilisés sur les multicoptères modernes (drones) - à balais et sans balais. Les drones brushless sont principalement équipés de drones coûteux et professionnels. Seules les options économiques et les jouets sont équipés de moteurs collecteurs. Plus de détails sur leurs différences peuvent être trouvés ici

Contrôle
Le multicoptère est contrôlé par une télécommande (alias télécommande, équipement, émetteur ) via des ondes radio sortantes (habituellement, aux fréquences 2,4 GHz ou 5,8 GHz ).
Pour que le multicoptère réponde aux demandes du panneau de commande, le drone est équipé de tout un ensemble de systèmes électroniques:
- Microprocesseur ( contrôleur de vol
- Gyroscope - est responsable du comportement stable du drone pendant le vol (en règle générale, il assure une stabilisation le long de 6 axes de direction).
- Accéléromètre - Ce capteur permet au processeur de positionner l'avion dans une position horizontale par rapport au sol.
- Capteur barométrique (baromètre) - fournit au drone un vol stationnaire stable à l'altitude sélectionnée par le pilote.
- Sonar (capteur à ultrasons) - permet un atterrissage automatique et en gardant une petite hauteur (1,5 - 3,5 mètres), peut également être utilisé pour contourner les obstacles.
- Module GPS - fournit le positionnement géographique du drone, en utilisant les données reçues des systèmes satellitaires. En raison de sa présence, la fonction de vol par points est réalisée, retournant sur le site de décollage en cas de perte de communication, ou de charge faible de la batterie, et permet également de faire des relevés de vol, aussi bien au moment du vol qu'après.
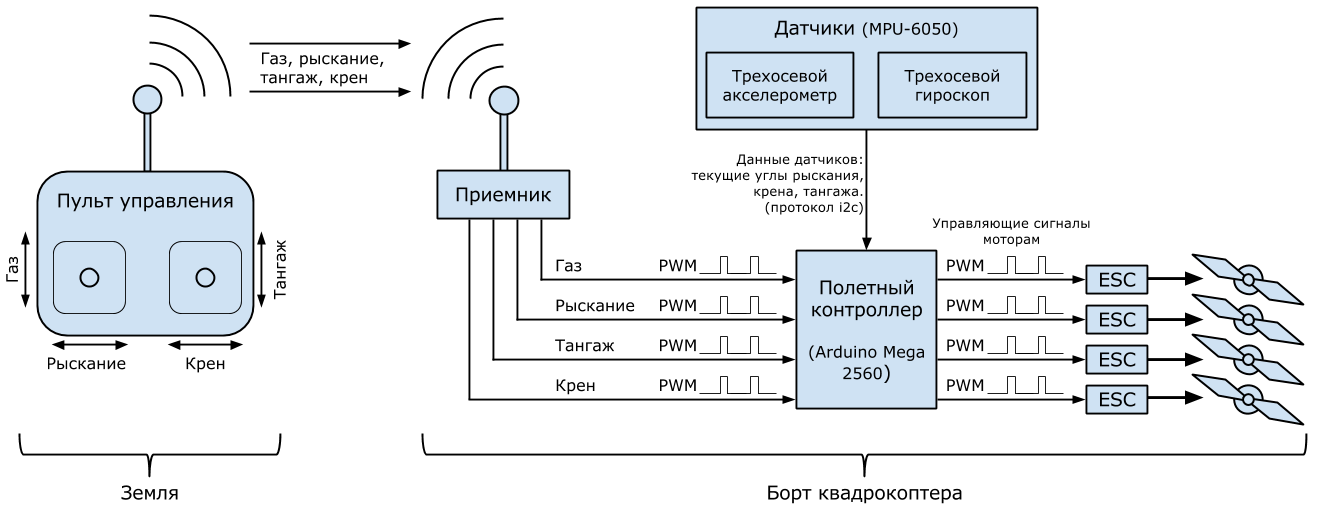
* Le schéma le plus simple d'un quadricoptère.
Qu'est-ce que c'est?
Actuellement, le marché des drones grand public propose un grand nombre de multicoptères (drones), mais en général ils peuvent être divisés en trois grands groupes: Pour Débutants / Amateur / Professionnel
Pour les débutants - convient aussi bien aux enfants qu'aux adultes dans le but de faire connaissance et d'apprendre. En règle générale, ils sont équipés d'un microprocesseur, d'un gyroscope à 6 axes et d'un simple capteur barométrique pour assurer le maintien de l'altitude.
Amateur - pour les pilotes qui ont déjà de l'expérience avec les drones. Plus adapté à une application spécifique. Par exemple, pour la photographie aérienne, ou pour des sports tels que les courses de drones. Les drones de ce groupe peuvent avoir des fonctions de vol et d'enquête autonomes.
Professionnel - Convient exclusivement aux pilotes expérimentés qui utilisent les capacités des multicoptères (drones) dans le domaine professionnel. Par exemple, prise de vue professionnelle en photo et vidéo, géodésie, surveillance des terres, du trafic, dans les opérations de sauvetage, etc. Dans la plupart des cas, les drones ont des fonctions de vol et de relevé autonomes. Le remplissage électronique est assemblé à partir de systèmes modernes de haute précision qui permettent un retrait sur de longues distances, et l'alimentation vous permet de passer beaucoup plus de temps en vol. La différence caractéristique entre ces multicoptères est leur prix.
Pour une connaissance plus complète des systèmes sans pilote, nous recommandons le sujet « Qu'est-ce qu'un drone?
.






