Какво е квадрокоптер?
Квадрокоптерът е вид мултикоптер. Мултикоптер е многодвигателен или многороторен самолет (хеликоптер), чийто основен ротор се върти диагонално в противоположни посоки. Мултикоптерите се различават по броя на двигателите (или по броя на роторите). В наши дни са използвани мултикоптери с три или повече ротора.
Най -често срещаните схеми са: 4/6/8 ротори. Апарат с три роторни витла се нарича трикоптер; с четири - квадрокоптер; с шест - хексакоптер и с осем ротора - октокоптер. Използването на всяка от схемите определя главно такъв параметър като - масата на полезния товар или, по -просто, теглото, което мултикоптерът може да поеме на борда.
Примери за съвременни мултироторни решения.
Съвременни мултироторни решения от различни ценови ниши:




От историята
Всичко започва през далечната 1922 г. с руско-американския самолетен конструктор Георги Александрович Ботезат. Който е изобретил първия по рода си работен квадрокоптер. Неговият апарат успя не само да слезе от земята, но и да се задържи във въздуха известно време. По това време такива устройства имаха един съществен недостатък - принципът на работа.

От четирите ротора само един беше водещият (въртенето беше зададено от двигателя с вътрешно горене), т.е. въртящият момент чрез сложна трансмисия се предава от един двигател към другия 3 основен ротор. Той не стигна до серийно развитие. И такива изобретения като "Tail rotor" и "Swashplate" принудиха напълно да изоставят разработването на многороторни самолети, по-късно беше създаден първият в света хеликоптер.
С настъпването на 21 век мултикоптерите влязоха в живота ни като безпилотни летателни апарати или дронове.
Основни компоненти на мултикоптери
Технически, преди около 5 години се появиха три основни компонента на мултикоптери (дронове):
- Батерия - литиев полимер (LiPo), по-рядко литиево-йон (Li-Ion).
- Безчеткови или матови редкоземни двигатели.
- Дистанционно управление (Контролен панел / Хардуер / Предавател)

Принцип на работа
Принципът на действие на съвременния мултикоптер е прост. В зависимост от схемата на приложение (3/4/6/8-ротор), всеки ротор се задвижва от електродвигател (електродвигател). Една половина от двигателите завъртат винтовете по посока на часовниковата стрелка, а другата половина обратно на часовниковата стрелка. Благодарение на този подход за управление на мултикоптера не се изисква използването на опашен ротор и сложна табла при проектирането на дрона.
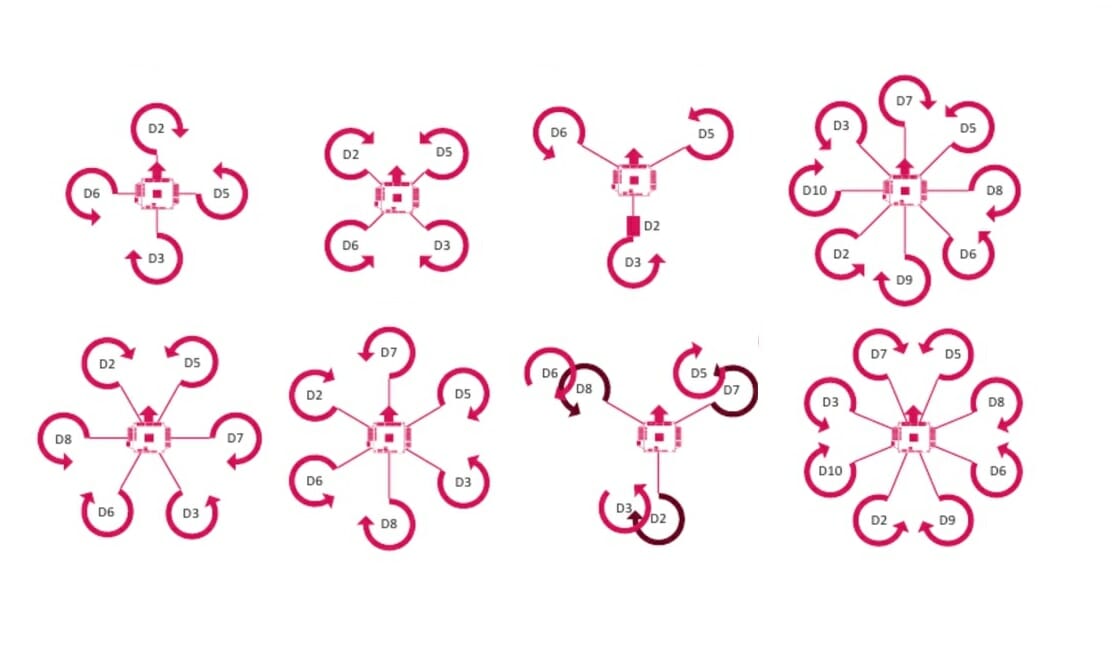
* Редът на посоката на въртене на многокоптерния ротор.
Пример за управление на полета:
- Увеличаване на оборотите на всички ротори - повдигане.
- Намаляване на скоростта на всички ротори - намалете.
- Увеличаването на оборотите на едната половина от винтовете и намаляването на оборотите на другата половина ще настроят движението встрани.
- Увеличаването на оборотите за витлата по часовниковата стрелка и намаляването на оборотите на витлата срещу часовниковата стрелка ще завърти дрона.
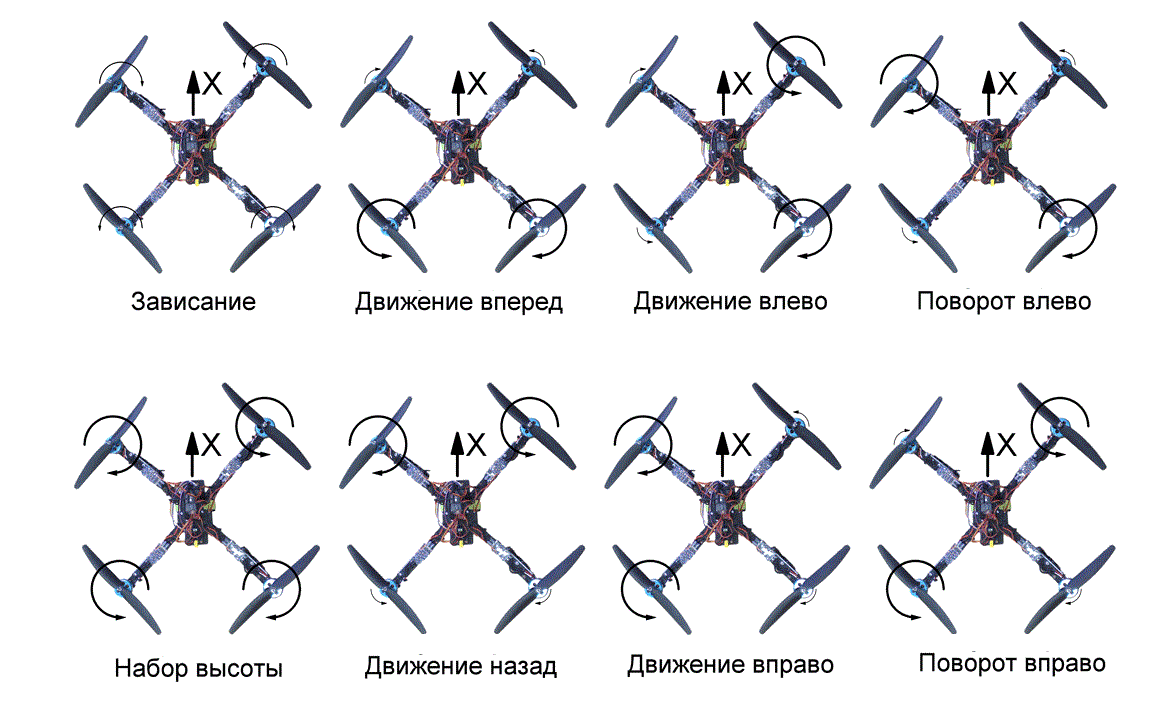
* Схема за управление на полета за въртене на роторите.
Двигатели
В момента на съвременните мултикоптери (дронове) се използват два вида електродвигатели - четки и безчетков. Безчетковите дронове са оборудвани главно със скъпи и професионални дронове. Само бюджетните опции и играчки са оборудвани с колекторни двигатели. Повече подробности за техните различия можете да намерите тук

Управление
Мултикоптерът се управлява от дистанционно управление (известен още като дистанционно управление, оборудване, предавател ) чрез изходящи радиовълни (обикновено, на честоти 2,4 GHz или 5,8 GHz ).
За да може мултикоптерът да отговори на исканията на контролния панел, дронът е оборудван с цял комплекс от електронни системи:
- Микропроцесор ( полетен контролер
- Жироскоп - е отговорен за стабилното поведение на дрона по време на полет (като правило осигурява стабилизация по 6 посоки на оста).
- Акселерометър - Този сензор позволява на процесора да позиционира самолета в хоризонтално положение спрямо земята.
- Барометричен сензор (барометър) - осигурява на дрона стабилно движение на избраната от пилота височина.
- Сонар (ултразвуков сензор) - осигурява автоматично кацане и поддържане на малка височина (1,5 - 3,5 метра), може да се използва и за прелитане около препятствия.
- GPS модул - осигурява географското позициониране на дрона, използвайки данни, получени от сателитни системи. Благодарение на присъствието си, функцията за летене по точки се реализира, връщане към мястото на излитане в случай на загуба на комуникация или ниско зареждане на батерията, а също така ви позволява да отчитате показанията на полета, както по време на полета, така и след.
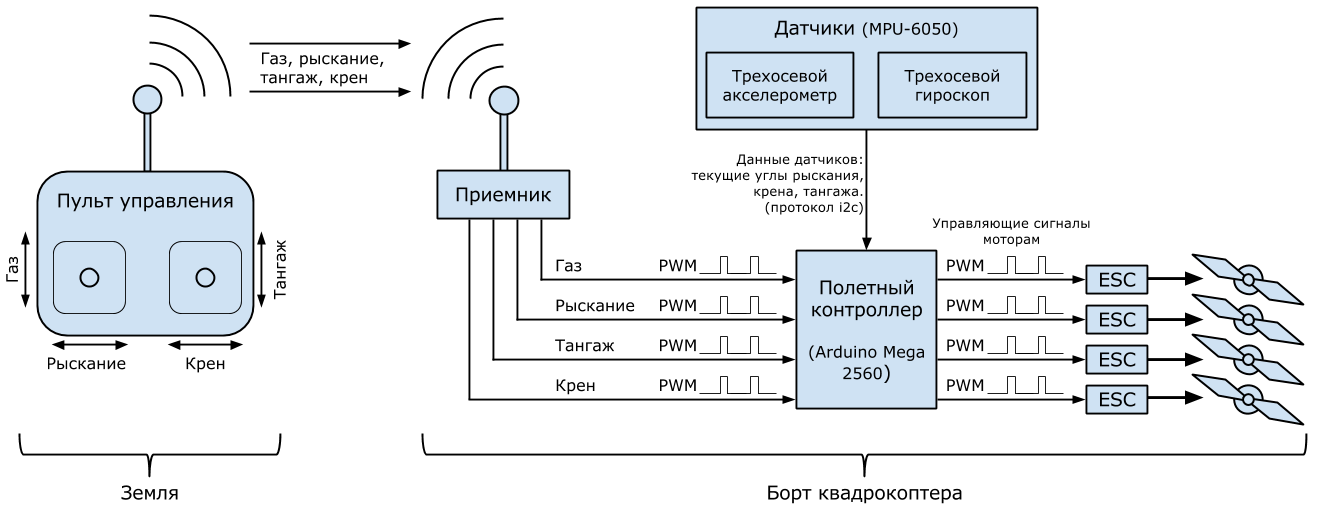
* Най -простата схема на устройство за квадрокоптер.
Какви са те?
В момента пазарът на потребителски дронове предлага огромен брой мултикоптери (дронове), но като цяло те могат да бъдат разделени на три големи групи: За начинаещи / любители / Професионален
За начинаещи - подходящ както за деца, така и за възрастни с цел първо запознаване и учене. Като правило те са оборудвани с микропроцесор, 6-осен жироскоп и обикновен барометричен сензор за осигуряване на задържане на височина.
Аматьорски - за пилоти, които вече имат опит с БЛА. По -подходящ за конкретно приложение. Например за въздушна фотография или за спорт като състезания с дронове. Дроновете в тази група могат да имат автономни функции за полет и наблюдение.
Професионален - Подходящ изключително за опитни пилоти, които използват възможностите на мултикоптери (дронове) в професионалната област. Например професионална фото- и видеозаснемане, геодезия, наблюдение на земята, трафик, при спасителни операции и др. В повечето случаи дроновете имат автономни функции за полет и наблюдение. Електронният пълнеж е сглобен от високо прецизни съвременни системи, които осигуряват отстраняване на големи разстояния, а захранването ви позволява да прекарвате много повече време в полет. Характерната разлика между такива мултикоптери е тяхната цена.
За по -пълно запознаване с безпилотни системи препоръчваме тема „Какво е дрон?“
.






