Čo je to kvadrokoptéra?
Kvadrokoptéra je druh multikoptéry. Multikoptéra je viacmotorové alebo viacrotorové lietadlo (helikoptéra), ktorého hlavný rotor sa otáča diagonálne v opačných smeroch. Multikoptéry sa líšia počtom motorov (alebo počtom rotorov). V dnešnej dobe sa používajú multikoptéry s tromi alebo viacerými rotormi.
Najbežnejšie schémy sú: 4/6/8 rotory. Prístroj s tromi rotorovými vrtuľami sa nazýva trikoptéra; so štyrmi - kvadrokoptéra; so šiestimi - hexacopter a s ôsmimi rotormi - octocopter. Použitie každej zo schém v zásade určuje taký parameter, ako je - hmotnosť užitočného zaťaženia alebo, jednoduchšie, hmotnosť, ktorú môže multikoptéra vziať na palubu.
Príklady moderných viacrotorových riešení.
Moderné viacrotorové riešenia z rôznych cenových medzier:




Z histórie
Všetko sa to začalo v roku 1922 s rusko-americkým konštruktérom lietadiel Georgiom Aleksandrovičom Botezatom. Kto vynašiel prvú pracovnú kvadrokoptéru svojho druhu. Jeho aparát sa dokázal nielen dostať zo zeme, ale tiež nejaký čas vydržal vo vzduchu. V tej dobe mali takéto zariadenia jednu významnú nevýhodu - princíp činnosti.

Zo štyroch rotorov bol iba jeden vedúci (otáčanie nastavoval spaľovací motor), t.j. krútiaci moment prostredníctvom komplexného prenosu bol prenášaný jedným motorom na druhý 3 hlavný rotor. K sériovému vývoju sa nedostalo. A také vynálezy ako „chvostový rotor“ a „Swashplate“ boli nútené úplne opustiť vývoj viacrotorových lietadiel, z ktorých bola neskôr vytvorená prvá helikoptéra na svete.
S príchodom 21. storočia vstúpili do nášho života multikoptéry ako bezpilotné prostriedky alebo drony.
Hlavné komponenty multikoptér
Technicky sa asi pred 5 rokmi objavili tri hlavné komponenty multikoptér (dronov):
- Batéria - lítiový polymér (LiPo), menej často lítium-iónový (Li-Ion).
- Bezkartáčové alebo kartáčované motory vzácnych zemín.
- Diaľkový ovládač (Ovládací panel / Hardware / vysielač)

Princíp činnosti
Princíp činnosti modernej multikoptéry je jednoduché. V závislosti od schémy použitia (3/4/6/8-rotor) je každý rotor poháňaný elektromotorom (elektromotorom). Jedna polovica motorov otáča skrutkami v smere hodinových ručičiek a druhá polovica proti smeru hodinových ručičiek. Vďaka tomuto prístupu nie je na ovládanie multikoptéry potrebné používať v drone chvostový rotor a komplexnú kyvnú dosku.
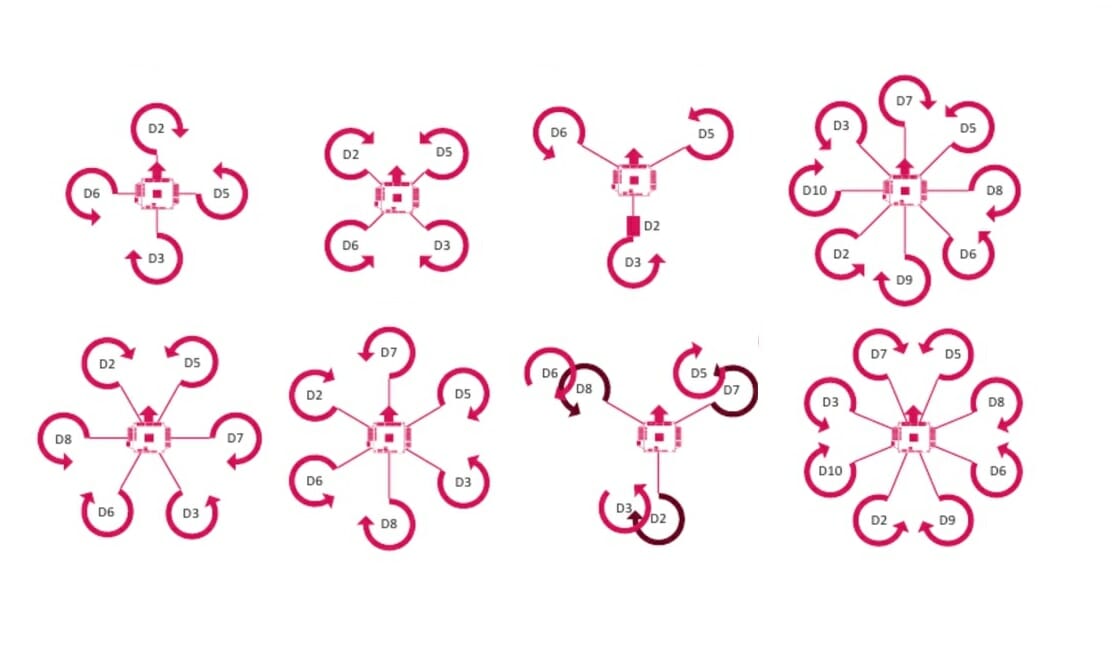
* Poradie smeru otáčania rotora multikoptéry.
Príklad riadenia letu:
- Zvýšte otáčky na všetkých rotoroch - zdvih.
- Zníženie rýchlosti na všetkých rotoroch - zníženie.
- Zvýšenie otáčok jednej polovice skrutiek a zníženie otáčok druhej polovice nastaví pohyb do strany.
- Zvýšenie otáčok proti smeru hodinových ručičiek vrtúľ a zníženie otáčok proti smeru hodinových ručičiek bude dron otáčať.
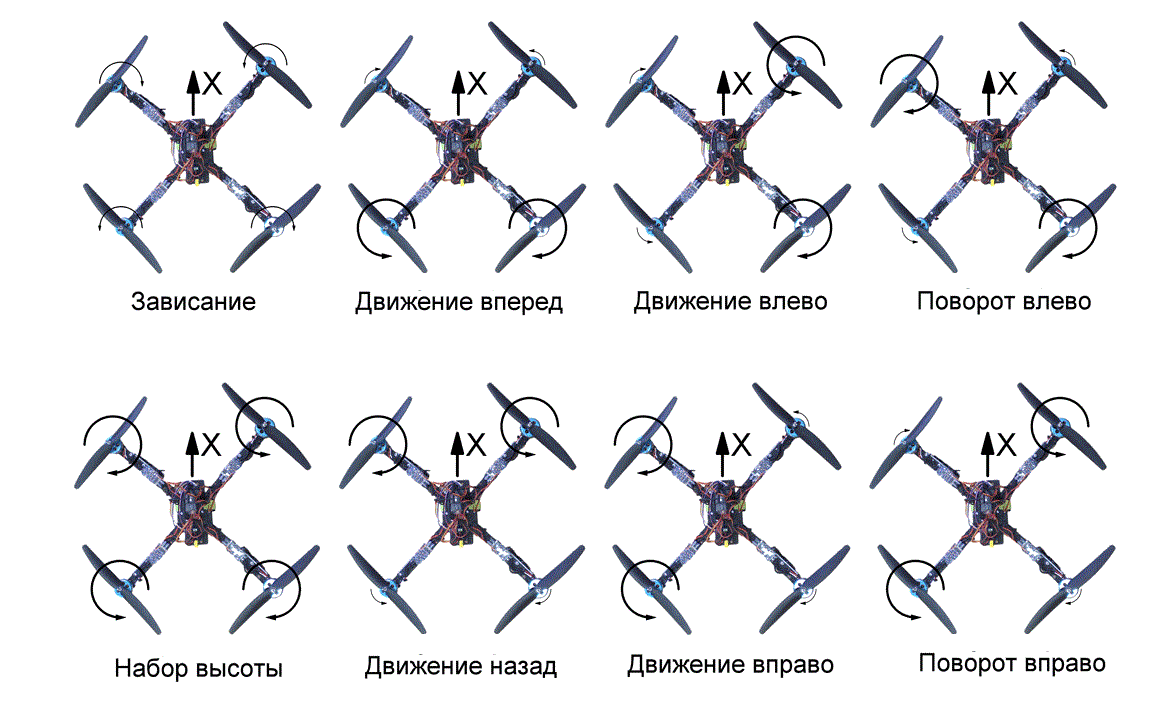
* Schéma riadenia letu pre otáčanie rotorov.
Motory
Na moderných multikoptéri (drony) sa v súčasnosti používajú dva typy elektromotorov - kartáčované a bezkartáčové. Bezkartáčové drony sú vybavené hlavne drahými a profesionálnymi dronmi. Kolektorovými motormi sú vybavené iba rozpočtové možnosti a hračky. Viac podrobností o ich rozdieloch nájdete tu

Ovládanie
Multikoptéra je ovládaná diaľkovým ovládačom (alias diaľkovým ovládaním, zariadením, vysielačom ) prostredníctvom odchádzajúcich rádiových vĺn (zvyčajne pri frekvenciách 2,4 GHz alebo 5,8 GHz ).
Aby multikoptéra reagovala na požiadavky ovládacieho panela, je dron vybavený celým komplexom elektronických systémov:
- mikroprocesorový ( letový ovládač
- Gyroskop - je zodpovedný za stabilné správanie sa drona počas letu (spravidla poskytuje stabilizáciu pozdĺž 6 smerových osí).
- Akcelerometer - Tento senzor umožňuje procesoru umiestniť lietadlo do horizontálnej polohy vzhľadom na zem.
- Barometrický senzor (barometer) - poskytuje dronu stabilné vznášanie sa vo zvolenej výške pilota.
- Sonar (ultrazvukový senzor) - poskytuje automatické pristátie a udržiavanie malej výšky (1,5 - 3,5 metra), dá sa použiť aj na oblet prekážok.
- GPS modul - poskytuje geografickú polohu drona pomocou údajov prijatých zo satelitných systémov. Vďaka svojej prítomnosti je funkcia lietania podľa bodov realizovaná, návrat na miesto vzletu v prípade straty komunikácie alebo nízkeho nabitia batérie a tiež vám umožňuje vykonávať letové hodnoty, a to ako v čase letu, tak aj po ňom..
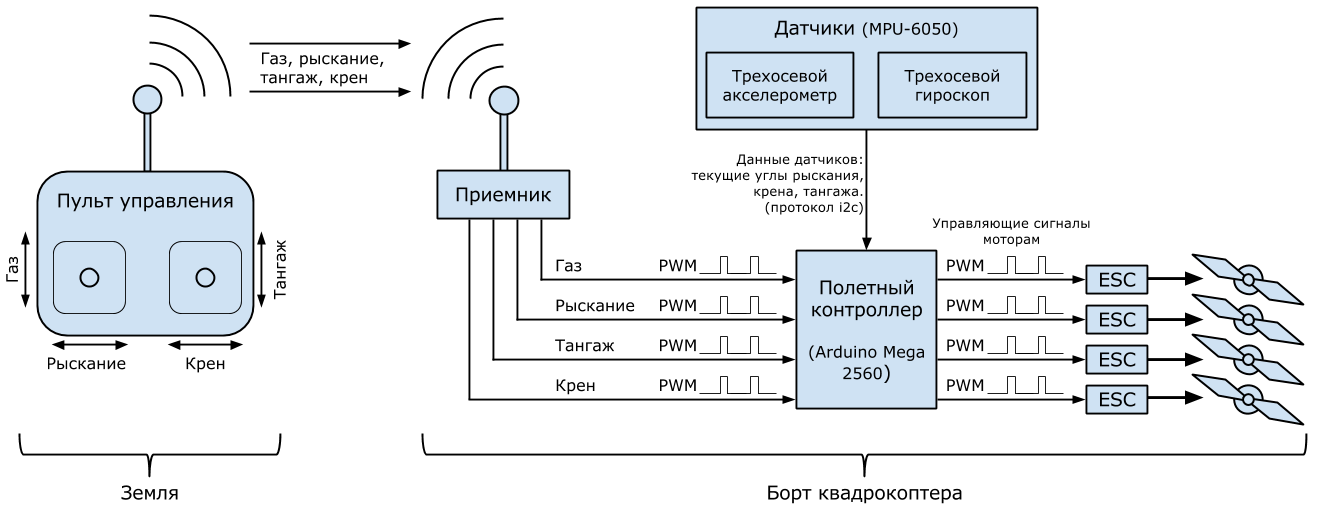
* Najjednoduchšia schéma zariadenia pre kvadrokoptéry.
Čo sú to?
V súčasnosti trh so spotrebiteľskými dronmi ponúka obrovské množstvo multikoptér (dronov), ale vo všeobecnosti ich možno rozdeliť do troch veľkých skupín: Pre Začiatočníkov / Amatérov / Profesionál
Pre začiatočníkov - vhodné pre deti i dospelých na účely prvého zoznámenia a učenia. Spravidla sú vybavené mikroprocesorom, 6-osovým gyroskopom a jednoduchým barometrickým snímačom, ktoré zaisťujú udržanie nadmorskej výšky.
Amatér - pre pilotov, ktorí už majú skúsenosti s UAV. Vhodnejšie pre konkrétnu aplikáciu. Napríklad na letecké fotografovanie alebo na športy, ako sú závody dronov. Drony v tejto skupine môžu mať autonómne letové a prieskumné funkcie.
Professional - Vhodné výhradne pre skúsených pilotov, ktorí v profesionálnej oblasti využívajú schopnosti multikoptér (dronov). Napríklad profesionálne snímanie fotografií a videa, geodézia, monitorovanie zeme, dopravy, pri záchranných operáciách atď. Drony majú vo väčšine prípadov autonómne funkcie letu a prieskumu. Elektronická náplň je zostavená z vysoko presných moderných systémov, ktoré umožňujú odstránenie na dlhé vzdialenosti, a napájací zdroj vám umožní stráviť oveľa viac času letom. Charakteristickým rozdielom medzi takýmito multikoptérami je ich cena.
Pre úplnejšie zoznámenie sa s bezpilotnými systémami odporúčame tému „Čo je to dron?“
.






