Vad är en quadcopter?
En quadrocopter är en slags multikopter. En multikopter är ett flermotorigt eller flerrotorflygplan (helikopter), vars huvudrotor roterar diagonalt i motsatta riktningar. Multicopters skiljer sig åt med antalet motorer (eller med antalet rotorer). Numera har multicopters med tre eller flera rotorer använts.
De vanligaste systemen är: 4/6/8 rotorer. En apparat med tre rotorpropellrar kallas en trikopter; med fyra - en quadcopter; med sex - en hexakopter och med åtta rotorer - en oktokopter. Användningen av vart och ett av systemen bestämmer i grunden en sådan parameter som - nyttolastens massa, eller, mer enkelt, vikten som multikoptern kan ta ombord.
Exempel på moderna lösningar med flera rotorer.
Moderna lösningar med flera rotorer från olika prisklasser:




Från historien
Allt började redan 1922 med den rysk-amerikanska flygdesignern Georgy Aleksandrovich Botezat. Som uppfann den första i sitt slag fungerande quadcopter. Hans apparat kunde inte bara komma av marken utan också hålla ut i luften en tid. Vid den tiden hade sådana enheter en betydande nackdel - driftsprincipen.

Av de fyra rotorerna var endast en den främsta (rotationen sattes av förbränningsmotorn), d.v.s. vridmoment genom en komplex transmission överfördes av en motor till den andra 3 huvudrotorn. Det kom inte till serieutveckling. Och sådana uppfinningar som "Tail rotor" och "Swashplate" tvingades helt överge utvecklingen av multirotorflygplan, som senare skapades världens första helikopter.
Med tillkomsten av 2000 -talet har multikoptrare kommit in i våra liv som obemannade flygbilar eller drönare.
Huvudkomponenter i multicopters
Tekniskt sett, för ungefär 5 år sedan, dök tre huvudkomponenter i multicopters (drönare) upp:
- Batteri - litiumpolymer (LiPo), mindre ofta litiumjon (Li-Ion).
- Borstlösa eller borstade sällsynta jordmotorer.
- Fjärrkontroll (kontrollpanel / hårdvara / sändare)

Driftsprincip
Funktionsprincipen för en modern multikopter är enkel. Beroende på tillämpningsschemat (3/4/6/8-rotor) drivs varje rotor av en elmotor (elmotor). Ena halvan av motorerna roterar skruvarna medurs, och den andra halvan moturs. Tack vare detta tillvägagångssätt, för att styra multikoptern, krävs inte användning av en svansrotor och en komplex swashplate i drönaren.
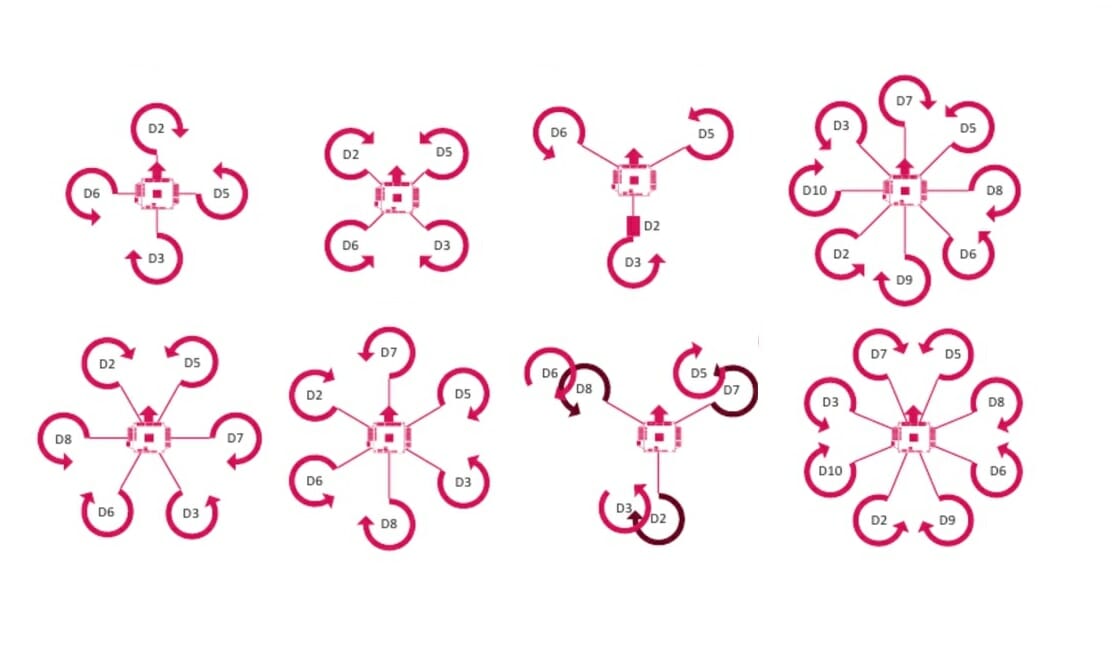
* Ordningen på multikopterrotorns rotationsriktning.
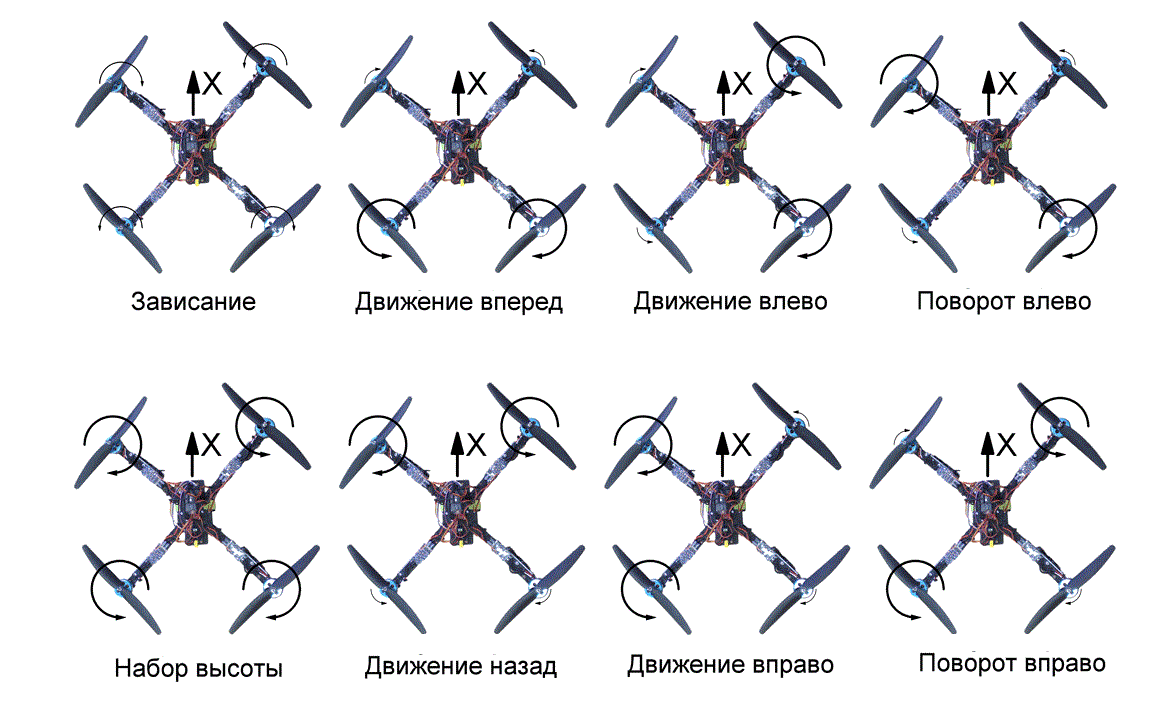
Exempel på flygkontroll:
- Öka varvtalet på alla rotorer - lyft.
- Minskning i hastighet på alla rotorer - minska.
- Ökning av varv för ena halvan av skruvarna och minskning av varv för den andra halvan sätter rörelsen åt sidan.
- Ökning av varvtalet för propellerna medurs och minskning av varvtalet för propellerna moturs roterar drönaren.
* Flygkontrollschema för rotornas rotation.
Motorer
Två typer av elmotorer används för närvarande på moderna multikoptrar (drönare) - borstade och borstlösa. Borstlösa drönare är främst utrustade med dyra och professionella drönare. Endast budgetalternativ och leksaker är utrustade med kollektormotorer. Mer information om deras skillnader finns här

Styrning
Multikoptern styrs av en fjärrkontroll (aka fjärrkontroll, utrustning, sändare ) via utgående radiovågor (vanligtvis vid frekvenser 2,4 GHz eller 5,8 GHz ).
För att få multikoptern att svara på kontrollpanelens förfrågningar är drönaren utrustad med ett helt komplex av elektroniska system:
- Mikroprocessor ( flygkontroll
- Gyroskop - ansvarar för dronens stabila beteende under flygning (som regel ger det stabilisering längs 6 riktningsaxlar).
- Accelerometer - Denna sensor tillåter processorn att placera flygplanet i ett horisontellt läge i förhållande till marken.
- Barometrisk sensor (barometer) - ger drönaren en stabil svävar vid pilotens valda höjd.
- Ekolod (ultraljudssensor) - ger automatisk landning och håller en liten höjd (1,5 - 3,5 meter), kan också användas för att flyga runt hinder.
- GPS -modul - ger den geografiska positioneringen av drönaren med hjälp av data som tas emot från satellitsystem. Tack vare dess närvaro förverkligas funktionen att flyga efter punkter, återvända till startplatsen vid kommunikationsförlust eller låg batteriladdning, och låter dig också ta flygavläsningar, både vid flygning och efter.
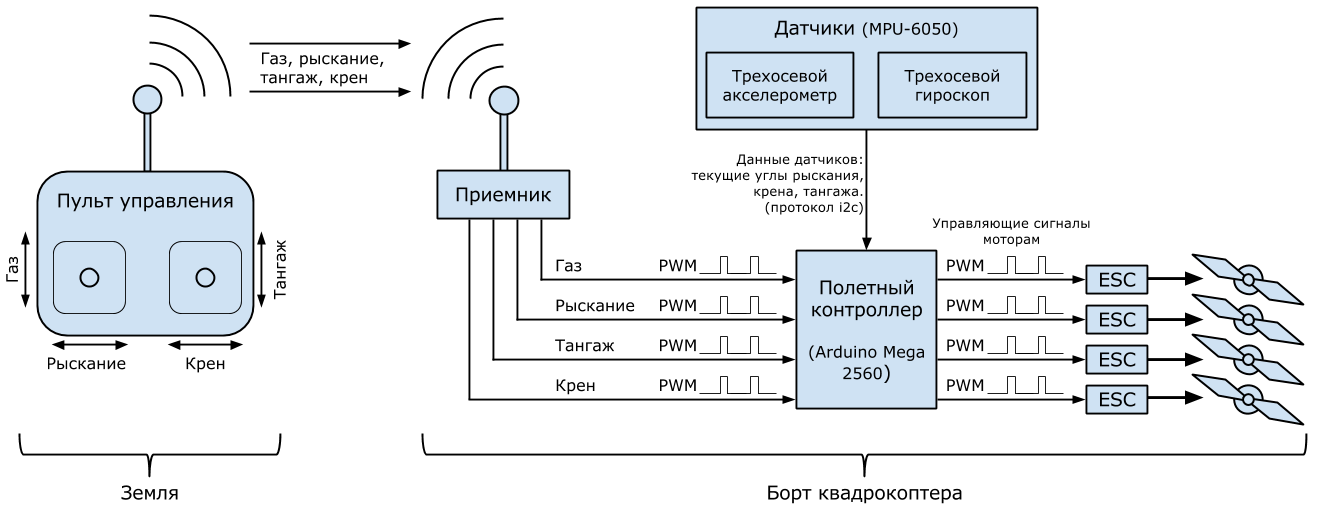
* Det enklaste schemat för en quadrocopter -enhet.
Vad är det?
För närvarande erbjuder konsumentdronmarknaden ett stort antal multicopters (drönare), men i allmänhet kan de delas in i tre stora grupper: För nybörjare / amatör / Professionell
För nybörjare - lämplig för både barn och vuxna för första bekantskap och lärande. Som regel är de utrustade med en mikroprocessor, ett 6-axligt gyroskop och en enkel barometrisk sensor för att säkerställa höjdhållning.
Amatör - för piloter som redan har erfarenhet av UAV. Mer lämplig för en specifik applikation. Till exempel för flygfotografering, eller för sport som drönare racing. Drönare i denna grupp kan ha autonoma flyg- och undersökningsfunktioner.
Professionell - Uteslutande lämplig för erfarna piloter som använder multicopters (drönares) funktioner inom yrkesområdet. Till exempel professionell foto- och videofotografering, geodesi, övervakning av mark, trafik, i räddningsinsatser etc. I de flesta fall har drönare autonoma flyg- och undersökningsfunktioner. Den elektroniska fyllningen är monterad från moderna system med hög precision som ger borttagning över långa avstånd, och strömförsörjningen gör att du kan spendera mycket mer tid i flygning. Den karakteristiska skillnaden mellan sådana multicopters är deras pris.
För en mer fullständig bekantskap med obemannade system rekommenderar vi ämne "Vad är en drönare?"
.






