تعریف
کنترل کننده های سرعت در جامعه انگلیسی زبان به نام Electric Speed Controller یا به اختصار ESC نامیده می شوند. وظیفه اصلی ESC انتقال انرژی از باتری به موتور بدون برس است. نیاز به استفاده از آنها به دلیل برخی از ویژگی های موتور BC ایجاد شد. به طور خلاصه ، باتری جریان مستقیم را تأمین می کند ، در حالی که موتور بدون برس جریان متناوب سه فاز را می پذیرد.

اصل کار
ارتباط با سایر اجزای مولتی کوپتر.
ورودی ESC با ولتاژ باتری و سیگنال های کنترلر تغذیه تامین می شود و تنظیم کننده ولتاژ کنترل را به درایو خروجی می دهد. بر این اساس ، تنظیم کننده باید:
- سازگاری با کنترل کننده پرواز را ارائه دهد.
- حداکثر جریان موتور (محاسبه شده از مشخصات موتور و پروانه) بعلاوه 20 - 30.
- مصرف فعلی کمتر از جریانی است که توسط باتری تقسیم بر تعداد ESC ها می شود.
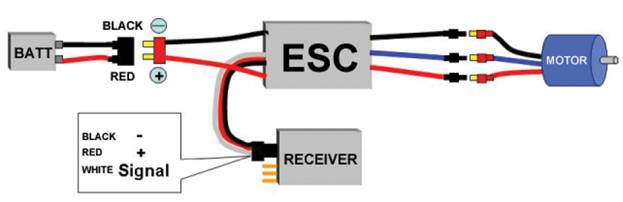
* ساده ترین نمودار اتصال.
چه نوع تنظیم کننده ای وجود دارد؟
BEC و UBEC
علاوه بر عملکرد اصلی ، ESC ها می توانند نیرو را به سایر قسمت های هواپیمای بدون سرنشین نیز انتقال دهند: کنترل کننده پرواز ، سروو و غیره. این امر با معرفی یک مدار حذف باتری (که از این پس BEC نامیده می شود) به تنظیم کننده بدست می آید.
استفاده از BEC طراحی هواپیمای بدون سرنشین را بسیار ساده می کند ، با این حال ، چنین طرحی تعدادی معایب دارد. واحد حذف باتری می تواند تحت نوسانات ولتاژ بالا و بارهای سنگین بیش از حد گرم شود. علاوه بر این ، ESC های دارای BEC گران تر از ESC های بدون بلوک هستند.
موافقم ، ایجاد ESC جداگانه و یک BEC به طور جداگانه منطقی تر و ارزان تر خواهد بود. چنین راه حلی وجود دارد و به آن Universal Battery Eliminator Circuit می گویند (از این پس UBEC نامیده می شود).
مزایای UBEC

UBEC - مستقیماً به باتری متصل می شود و مجموعه پهپاد مورد نظر را تغذیه می کند. مزایای این رویکرد بسیار قابل توجه است:
- کنترل کننده های سرعت کمتر گرم می شوند ، زیرا BEC از آنها حذف می شود
- UBEC ها دارای راندمان بالایی هستند
- بنابراین ، از دو نقطه قبلی ، UBEC قادر است جریان بیشتری را با ریسک کمتر ارائه دهد
- بدون پرداخت بیش از حد برای چند BEC اضافی واقع در ESC. برای برخی از کنترل کننده های پرواز ، اتصال بیش از یک ESC BEC بسیار مأیوس کننده است
- وزن سبک تر کنترل ها
انواع BEC ها و مزایای آنها
BEC ها دو نوع: خطی (LBEC) و پالس (SBEC).

- خطی انرژی را به گرما تبدیل می کند و در صورت گرم شدن بیش از حد خاموش می شود. این می تواند به نتایج ناخوشایندی منجر شود: در بهترین حالت ، هلی کوپتر قادر به برخاستن نیست و در بدترین حالت ، سقوط کنترل نشده. در این رابطه ، از آن در مجموعه ای با درایوهای سرو استفاده می شود ، که به نوبه خود جریان زیادی مصرف نمی کنند و از گرم شدن بیش از حد دستگاه جلوگیری می کند.
- تنظیم کننده پالس با روشن و خاموش کردن سریع ولتاژ ، ولتاژ را تنظیم می کند ، این روش گرمای بیش از حد را از بین می برد ، قدرت خروجی را افزایش می دهد و به 90 efficiency بازدهی می رسد ، و همچنین BEC های پالس از نظر وزنی برتری دارند. تداخل ایجاد شده در مدار ، که بر عملکرد تجهیزات رادیویی تأثیر منفی می گذارد ، با افزودن فیلتر LC برطرف می شود.

با توجه به اینکه بسیاری از تولیدکنندگان فیلترهایی را بر روی UBECLC خود نصب می کنند (و اگر هنوز فیلتری وجود ندارد ، می توان آن را ارزان و آسان خرید برای نصب) ، متخصصان از تنظیم کننده های SBEC در هواپیماهای بدون سرنشین خود استفاده می کنند.
نرم افزار ESC
از آنجا که کنترل کننده سرعت برخی فرکانس ها را تبدیل می کند و می تواند برای حالت های مختلف عملکرد پیکربندی شود ، یک نرم افزار جداگانه به نام سیستم عامل برای آن نوشته شده است به این به شما امکان می دهد خطاهای گذشته را در الگوریتم های کنترل تصحیح کنید ، سیستم عامل پیشرفته تری ایجاد کنید (و در نتیجه ، به عنوان مثال ، مصرف باتری را به طور متوسط کاهش دهید) و تنظیمات انعطاف پذیر را انجام دهید. در هواپیماهای بدون سرنشین شرکت های معروف مانند DJI ، نرم افزار کنترل کننده با استفاده از کنترل کننده پرواز به طور خودکار تغییر می کند.
توجه! بازنویسی نرم افزار برای کنترل کننده های سرعت ممکن است باعث خرابی های مختلف پهپاد و همچنین لغو خدمات گارانتی شود! به یاد داشته باشید ، شما این کار را با مسئولیت خود انجام می دهید!
چگونه نرم افزار را تغییر دهم؟
چندین روش برای تغییر نرم افزار کنترل کننده وجود دارد:
- استفاده از صفحه کنترل اختصاصی
- استفاده از کنترل کننده پرواز
- استفاده از برنامه نویس ASP
گزینه سوم ساده تر است و در حال حاضر به طور فعال در مدل های جدید در حال پیاده سازی است.
انتخاب فرماندار
بر اساس همه موارد فوق ، معیارهای خاصی برای انتخاب فرماندار برای هواپیمای بدون سرنشین وجود دارد:
- سازگار با کنترل پرواز. کنترل کننده پرواز باید از سیستم عامل BEC و ESC پشتیبانی کند.
- سازگار با مشخصات موتور و باتری.
- وجود یا عدم وجود BEС و نوع آن (LBEC یا SBEC).
- دفع و سفت شدن گرما.







