คำจำกัดความ
ตัวควบคุมความเร็วเรียกว่า Electric Speed Controller หรือ ESC สำหรับระยะสั้นในชุมชนที่พูดภาษาอังกฤษ งานหลักของ ESC คือการถ่ายโอนพลังงานจากแบตเตอรี่ไปยังมอเตอร์แบบไม่มีแปรง ความจำเป็นในการใช้งานเกิดขึ้นเนื่องจากคุณสมบัติบางอย่างของ BC - มอเตอร์ กล่าวโดยสรุปคือ แบตเตอรี่จ่ายกระแสตรง ในขณะที่มอเตอร์ไร้แปรงถ่านรับกระแสสลับสามเฟส

หลักการทำงาน
การสื่อสารกับส่วนประกอบอื่น ๆ ของมัลติคอปเตอร์
อินพุต ESC มาพร้อมกับแรงดันไฟฟ้าจากแบตเตอรี่และสัญญาณจากตัวควบคุมการบิน และตัวควบคุมจะส่งสัญญาณแรงดันควบคุมไปยังไดรฟ์ ดังนั้นผู้ควบคุมจะต้องจัดเตรียม:
- ความเข้ากันได้กับตัวควบคุมการบิน
- กระแสมอเตอร์สูงสุด (คำนวณจากข้อกำหนดมอเตอร์และใบพัด) บวก 20 - 30%
- การสิ้นเปลืองกระแสไฟน้อยกว่ากระแสไฟที่จ่ายโดยแบตเตอรี่หารด้วยจำนวน ESC
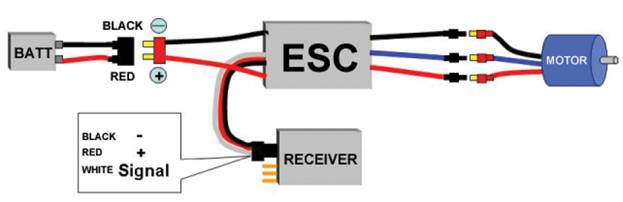
* แผนภาพการเชื่อมต่อที่ง่ายที่สุด
มีหน่วยงานกำกับดูแลประเภทใดบ้าง?
BEC และ UBEC
นอกจากฟังก์ชั่นหลักแล้ว ESC ยังส่งกำลังไปยังส่วนอื่น ๆ ของโดรนได้อีกด้วย: ตัวควบคุมการบิน, เซอร์โวและอื่น ๆ สิ่งนี้ทำได้โดยการแนะนำวงจรกำจัดแบตเตอรี่ (ต่อไปนี้จะเรียกว่า BEC) ลงในตัวควบคุม
การใช้ BEC ทำให้การออกแบบโดรนง่ายขึ้นอย่างมาก อย่างไรก็ตาม โครงการดังกล่าวมีข้อเสียหลายประการ หน่วยแยกแบตเตอรี่อาจร้อนเกินไปภายใต้ความผันผวนของไฟฟ้าแรงสูงและภาระหนัก นอกจากนี้ ESC ที่มี BEC มักจะมีราคาแพงกว่า ESC ที่ไม่มีบล็อก
เห็นด้วย มันจะสมเหตุสมผลกว่าและถูกกว่าที่จะสร้าง ESC แยกกับ BEC หนึ่งชุดแยกกัน มีวิธีแก้ปัญหาดังกล่าวและเรียกว่า Universal Battery Eliminator Circuit (ต่อไปนี้จะเรียกว่า UBEC)
ประโยชน์ของ UBEC

UBEC - เชื่อมต่อโดยตรงกับแบตเตอรี่และจ่ายไฟให้กับชุดโดรนที่ต้องการ ข้อดีของวิธีนี้มีความสำคัญมาก:
- ตัวควบคุมความเร็วจะร้อนน้อยลงเนื่องจาก BEC จะถูกแยกออกจากพวกเขา
- UBECs มีประสิทธิภาพสูง
- ดังนั้น จากสองประเด็นก่อนหน้านี้ UBEC สามารถส่งกระแสไฟได้มากขึ้นโดยมีความเสี่ยงน้อยกว่า
- ไม่มีการจ่ายเงินมากเกินไปสำหรับ BEC พิเศษสองสามตัวที่อยู่ใน ESC สำหรับผู้ควบคุมการบินบางประเภท ไม่ควรเชื่อมต่อ ESC BEC มากกว่าหนึ่งตัว
- น้ำหนักเบาของตัวควบคุม
ประเภทของ BEC และข้อดี
BEC คือ สองประเภท: เชิงเส้น (LBEC) และพัลส์ (SBEC)

- เชิงเส้นแปลงพลังงานเป็นความร้อนและปิดเมื่อร้อนเกินไป ซึ่งอาจนำไปสู่ผลลัพธ์ที่ไม่น่าพอใจ: อย่างดีที่สุด คอปเตอร์จะไม่สามารถบินขึ้นได้ และที่แย่ที่สุดก็คือ การล้มที่ไม่สามารถควบคุมได้ ในการเชื่อมต่อนี้ มันเริ่มใช้ในแอสเซมบลีกับเซอร์โวไดรฟ์ ซึ่งในทางกลับกัน ไม่ใช้กระแสไฟมาก ป้องกันไม่ให้หน่วยร้อนเกินไป
- พัลส์ควบคุมแรงดันไฟฟ้าด้วยการเปิดและปิดอย่างรวดเร็ว วิธีการนี้จะขจัดความร้อนสูงเกินไป เพิ่มกำลังขับ และอนุญาตให้มีประสิทธิภาพถึง 90% และ BEC แบบพัลส์มีประสิทธิภาพเหนือกว่าน้ำหนักเชิงเส้น การรบกวนที่เกิดขึ้นในวงจร ซึ่งส่งผลเสียต่อการทำงานของอุปกรณ์วิทยุ ถูกกำจัดโดยการเพิ่มตัวกรอง LC

พิจารณาว่าผู้ผลิตหลายรายติดตั้งตัวกรองบน UBECLC ของตน (และหากยังไม่มีตัวกรองก็สามารถซื้อได้ง่ายและราคาถูก ในการติดตั้ง) ผู้เชี่ยวชาญใช้หน่วยงานกำกับดูแลของ SBEC ในคอปเตอร์ของตน
ซอฟต์แวร์ ESC
เนื่องจากตัวควบคุมความเร็วทำการแปลงบางอย่างที่ความถี่สูงและสามารถกำหนดค่าสำหรับโหมดการทำงานที่แตกต่างกัน ซอฟต์แวร์แยกต่างหากที่เรียกว่าเฟิร์มแวร์จึงถูกเขียนขึ้น. วิธีนี้ช่วยให้คุณแก้ไขข้อผิดพลาดที่ผ่านมาในอัลกอริธึมการควบคุม สร้างเฟิร์มแวร์ขั้นสูง (และด้วยเหตุนี้ เช่น ลดการใช้แบตเตอรี่โดยเฉลี่ย) และทำการตั้งค่าที่ยืดหยุ่น ในโดรนจากบริษัทที่มีชื่อเสียง เช่น DJI ซอฟต์แวร์ควบคุมจะเปลี่ยนโดยอัตโนมัติโดยใช้ตัวควบคุมการบิน
โปรดทราบ! การเขียนทับซอฟต์แวร์สำหรับตัวควบคุมความเร็วอาจส่งผลให้เกิดการพังทลายของโดรน รวมถึงการยกเลิกบริการรับประกัน! จำไว้ว่าคุณกำลังทำสิ่งนี้ด้วยความเสี่ยงและอันตรายของคุณเอง!
ฉันจะเปลี่ยนซอฟต์แวร์ได้อย่างไร?
มีหลายวิธีในการเปลี่ยนซอฟต์แวร์ควบคุม:
- การใช้แผงควบคุมเฉพาะ
- การใช้ตัวควบคุมการบิน
- การใช้โปรแกรมเมอร์ ASP
ตัวเลือกที่สามนั้นง่ายกว่าและกำลังถูกนำไปใช้อย่างแข็งขันในโมเดลใหม่
การเลือกผู้ว่าราชการจังหวัด
จากทั้งหมดที่กล่าวมามีเกณฑ์พิเศษสำหรับการเลือกผู้ว่าการโดรน:
- ) เข้ากันได้กับตัวควบคุมการบิน ผู้ควบคุมการบินต้องรองรับเฟิร์มแวร์ BEC และ ESC
- เข้ากันได้กับข้อกำหนดของมอเตอร์และแบตเตอรี่
- การมีหรือไม่มี BEС และประเภทของมัน (LBEC หรือ SBEC)
- การกระจายความร้อนและความรัดกุม







