定义
速度控制器在英语社区被称为Electric Speed Controller或ESC的简称。电调的主要任务是将能量从电池传递到无刷电机。由于 BC 电机的某些功能,因此需要使用它们。简而言之,电池提供直流电,而无刷电机接受三相交流电。

工作原理
与多旋翼其他组件的通信。
电调输入由电池电压和飞控信号提供,调节器输出控制电压给驱动器。因此,监管机构必须提供:
- 与飞行控制器的兼容性。
- 最大电机电流(根据电机和螺旋桨规格计算)加上 20 - 30%。
- 电流消耗小于电池提供的电流除以电调数量。
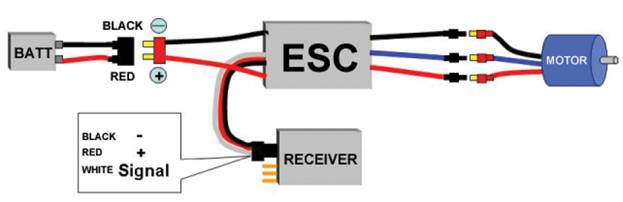
* 最简单的接线图。
有哪些监管机构?
BEC 和 UBEC
除了主要功能外,电调还可以将动力传输到无人机的其他部分:飞控、舵机等。这是通过在稳压器中引入电池消除电路(以下简称 BEC)来实现的。
BEC 的使用大大简化了无人机的设计,但是,这种方案有许多缺点。电池排除单元在高电压波动和重负载下可能会过热。此外,带有 BEC 的 ESC 往往比没有块的 ESC 贵。
同意,单独制作一个单独的 ESC 和一个 BEC 会更合乎逻辑且更便宜。有这样一种解决方案,叫做通用电池消除电路(以下简称UBEC)。
UBEC 的优点

UBEC - 直接连接到电池并为所需的无人机组件供电。这种方法的优点非常显着:
- 速度控制器过热较少,因为 BEC 将被排除在外
- UBEC 具有高效率
- 因此,从前两点来看,UBEC 能够以更低的风险提供更多的电流
- 无需为位于 ESC 中的一些额外 BEC 支付过多的费用。对于某些飞行控制器,强烈建议不要连接多个 ESC BEC
- 控制器重量更轻
BEC 的类型及其优点
BEC 是两种类型:线性 (LBEC) 和脉冲 (SBEC)。

- 线性将能量转换为热量,并在过热时关闭。这可能会导致令人不快的结果:充其量,直升机将无法起飞,最坏的情况是失控坠落。在这方面,它开始用于带有伺服驱动器的组件中,反过来,它不会消耗太多电流,从而防止设备过热。
- 脉冲通过快速打开和关闭电源来调节电压,这种方法消除了过热,增加了输出功率,并允许达到 90% 的效率,并且脉冲 BEC 在重量上优于线性 BEC。电路中产生的干扰会对无线电设备的操作产生不利影响,可通过添加 LC 滤波器来消除。

考虑到很多厂家在他们的UBECLC上都安装了过滤器(如果仍然没有过滤器,那么可以便宜又容易地买到安装),专业人士在他们的无人机中使用 SBEC 调节器。
软件ESC
由于速度控制器以高频执行一些转换,并且可以针对不同的操作模式进行配置,因此为其编写了称为固件的单独软件.这允许您纠正控制算法中过去的错误,创建更高级的固件(从而,例如,减少平均气体的电池消耗)并进行灵活的设置。在大疆等知名公司的无人机中,控制器软件是通过飞行控制器自动更改的。
注意!覆盖调速器软件可能会导致无人机各种故障,以及取消保修服务!请记住,这样做的后果自负!
如何更改软件?
更改控制器软件有以下几种方法:
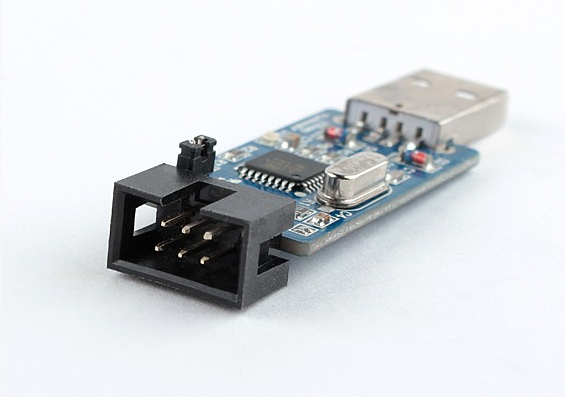
- 使用专用控制板
- 使用飞控
- 使用ASP 编程器
第三种选择更简单,目前正在新模型中积极实施。
调速器的选择
综上所述,无人机调速器的选择有一些特殊的标准:
- ) 与飞行控制器兼容。飞控必须支持 BEC 和 ESC 固件。
- 与电机和电池规格兼容。
- BEС 的存在与否及其类型(LBEC 或 SBEC)。
- 散热和密封性。







