
- 1 Pendahuluan
- 2 Pengembang tentang mesin
- 3 Fitur
- 4 Paket isi
- 5 Spesifikasi
- 5.1 Drone
- 5.2 Komunikasi
- 5.3 Sistem Navigasi
- 5.4 Skycontroller 4
- 5.5 Baterai Cerdas Pesawat
- 5.6 Aplikasi
- 5.7 Kamera
- 5.8 Mode penerbangan otonom
- 5.9 Keamanan siber
- 5.10 Parrot SDK
- 6 Penampilan
- 7 Komunikasi
- 7.1 4G
- 7.2 Maks. jangkauan dengan koneksi 4G
- 7.3 Wi-Fi
- 7.4 Video langsung
- 8 Kamera
- 8.1 matriks 48MP
- 8.2 Lensa
- 8.3 Mode video
- 8.4 Encoding Video
- 8.5 HDR
- 8.6 Mode Foto
- 9 Stabilisasi hibrida
- 9.1 Gimbal kamera utama
- 10 Fotogrametri
- 10.1 Inspeksi dan kartografi
- 10.2 AI dan kemampuan 4G
- 10.3 Penerbangan otonom
- 11 Fotogrametri atau lidar
- 11.1 Kelebihan fotogrametri
- 11.2 Kontra LIDAR
- 12 SDK
- 12.1 Air SDK
- 12.2 SDK Darat
- 12.3 OpenFlight
- 12.4 Sphinx
- 12,5 Olympe
- 12,6 PdrAW
- 12,7 Model C. A. D.
- 12,8 MAVLink dan kompatibilitas GUTMA
- 13 Ekosistem mitra terbesar untuk drone Parrot
- 13.1 Parrot untuk Semua Kebutuhan Bisnis
- 14 Keamanan Siber
- 14.1 Privasi Data
- 14.2 Sesuai FIPS140 -2 dan disertifikasi oleh Elemen Aman CC EAL5
- 14.3 Koneksi Aman 4G dan Otentikasi Kuat
- 14.4 Inisialisasi dan Peningkatan Aman
- 14.5 Mengatur Kunci Pengguna pada Elemen Aman
- 14.6 Foto yang Ditandatangani Secara Digital
- 14.7 Transparansi dan Pemeriksaan Keamanan Berkelanjutan dengan Bug bounty
- 15 Pengelolaan Data
- 15.1 Data yang Dikumpulkan
- 15.2 Penggunaan Akhir Data yang Dikumpulkan [1 26]
- 15.3 Peningkatan kecerdasan buatan (AI)
- 16 Karakteristik penerbangan
- 16.1 Karakteristik aerodinamis
- 16.2 Aktuator dan aerodinamika
- 16.3 Sensor
- 16.4 Karakteristik sensor
- 16,5 Autopilot
- 17 Penerbangan otonom
- 17.1 Fitur utama
- 17.2 Strategi sistem persepsi
- 17.3 Sensor
- 17.4 Suspensi ganda
- 17.5 Rekonstruksi lingkungan
- 18 Misi Penerbangan
- 18.1 Fitur Utama
- 19 Harga dan Ketersediaan
- 20 Unduh Dokumentasi
- 21 Video
Pendahuluan [16 4]
Parrot Anafi Ai adalah solusi unik yang benar-benar baru dari pengembang Prancis terkenalpenggunaan komersial
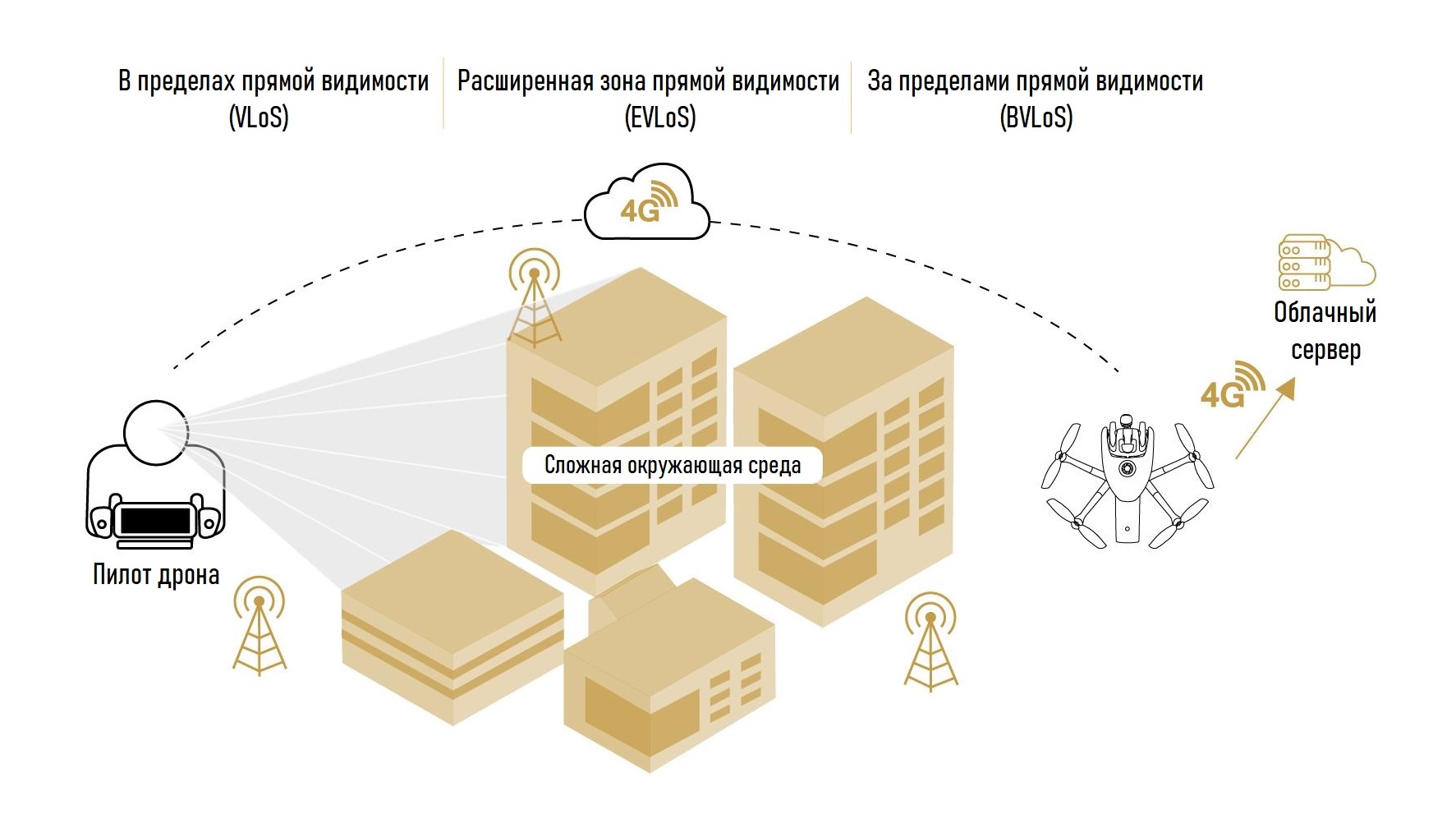
Kartu panggil Anafi Ai adalah modul 4G bawaan, berkat itu drone dapat menggunakan komunikasi seluler generasi keempat sebagai saluran transmisi data utama antara drone dan peralatan kontrol, yang sebenarnya menghapus semua batasan pada jangkauan penerbangan dan menentukan operasi UAV di luar garis pandang. Ke depan, kami mencatat bahwa potensi mesin yang dinyatakan ternyata sangat kuat dan lebih dari sebelumnya sesuai dengan penampilannya yang futuristik, yang terinspirasi oleh alam untuk menciptakan insinyur Prancis.
Pengembang tentang mobil
Martin Liné, direktur pemasaran di Parrot, drone Parrot

Fitur
Fitur Utama Parrot Anafi Ai:
- Berat 898 gram
- Waktu terbang 60 detik
- Desain lipat portabel yang unik
- Modul komunikasi 4G bawaan untuk interaksi peralatan drone / kontrol penuh tanpa batasan di semua kondisi lingkungan
- Kompatibel dengan LTE di seluruh dunia
- Dilengkapi dengan sistem transmisi sinyal omnidirectional (4 antena directional dengan reflektor (gain: antena 2,5 dBi / s). Drone menentukan pasangan antena terbaik tergantung pada orientasi dan posisinya relatif terhadap pilot position)
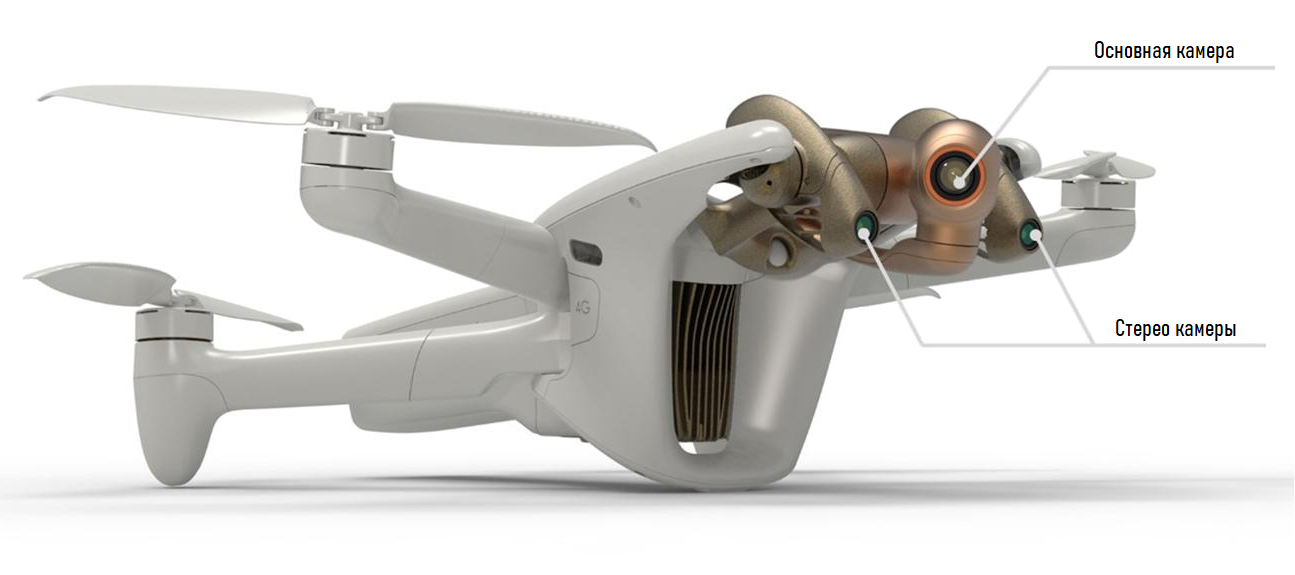
- Dilengkapi dengan sistem pencitraan omnidirectional unik dari dunia sekitarnya yang dibangun di atas sepasang kamera stereoskopik yang dipasang pada gimbal khusus dengan rentang pan 330 derajat (-120 ° hingga 210 °), bekerja di tandem dengan sistem optimasi cerdas. jalur penerbangan
- Diadaptasi untuk penerbangan dalam ruangan
- Streaming video langsung dalam 1080p dengan latensi rendah (300 m / s) tanpa batasan jangkauan di mana pun di dunia, dengan bitrate video 12 Mbps
- Kemampuan untuk mentransfer file ke penyimpanan cloud secara langsung dalam penerbangan
- Modul komunikasi Wi-Fi bawaan (Wi-Fi 802.11a / b / g / n) untuk kontrol interaksi drone / peralatan penuh (sebagai alternatif opsi koneksi)
- Budak. Rentang frekuensi Wi-Fi: 2.4GHz / 5.8GHz
- Maks. jangkauan penerbangan FPV melalui Wi-Fi: 9 km
- Mode otomatis unik pengoperasian modul 4G / Wi-Fi, yang memungkinkan, berdasarkan kemacetan jaringan, beralih dari satu teknologi komunikasi ke teknologi lainnya tanpa kehilangan data
- Kelas perlindungan drone IPX3
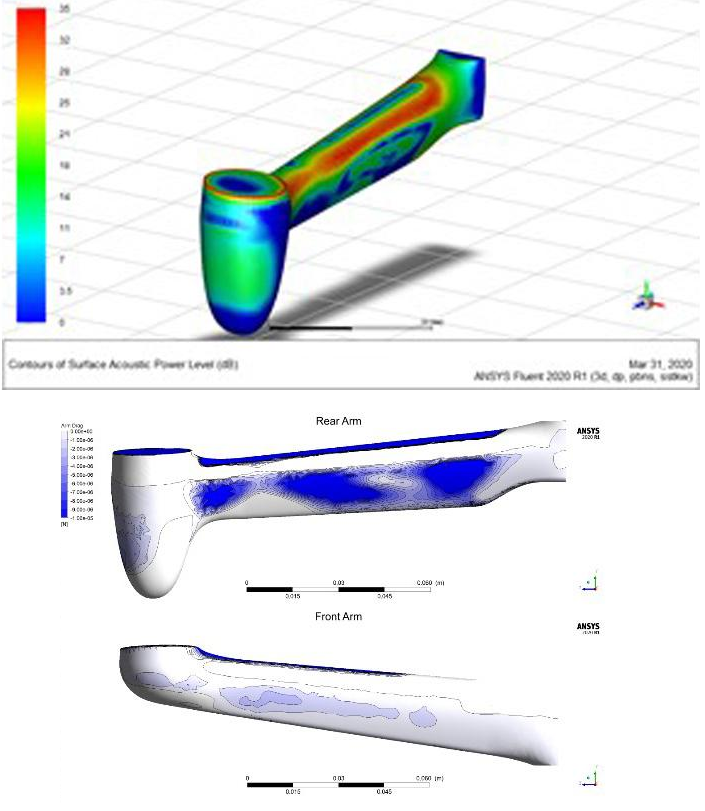
- Maks. waktu penerbangan 32 menit
- Maks. kecepatan penerbangan horizontal 61 km / jam
- Maks. hambatan angin: 13 m / s
- Maks.langit-langit di atas permukaan laut 5000 m
- Kamera 48MP 4K dibangun di atas matriks CMOS 1/2-inci dengan ukuran piksel 0,8 mikron; dengan susunan filter warna Bayer bawaan
- Lensa LD-ASPH optik
- Sistem stabilisasi gambar 6-sumbu hibrida (EIS digital 3-sumbu mekanis 3-sumbu)
- Dapat dikontrol jangkauan operasi Gimbal -90 ° hingga 90 °
- 6x Zoom Digital Tanpa Rugi (2x 4K / 4x FHD)
- Maks. kecepatan bit video 200 Mbps
- Format perekaman video HDR8 / HDR10
- Maks. rentang dinamis 14EV
- Profil warna P-log untuk pasca-pemrosesan
- 5 × mode penerbangan dan pemotretan otomatis (Fotogrametri / Flight Plan / Cameraman / Smart RTH / Vehicle)
- Slot internal untuk kartu MicroSD dan SIM
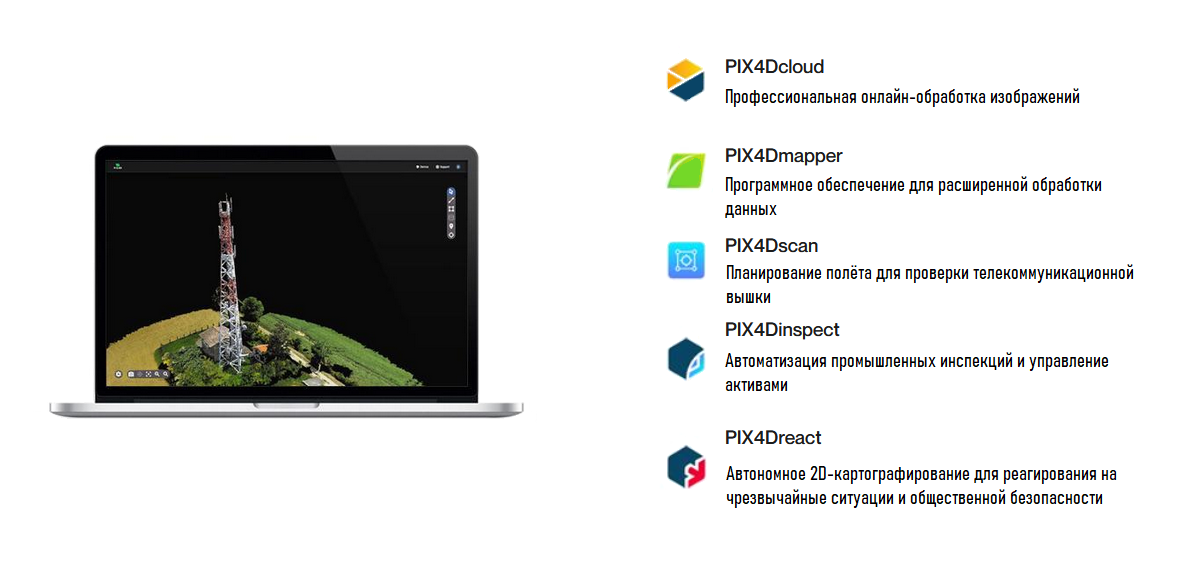
- Kompatibel dengan PIX4D Suite
- Mode penerbangan fotogrametri tersedia di mob. Aplikasi FreeFlight 7 dan perangkat lunak OpenFlight
- Pembuatan rencana penerbangan sekali klik
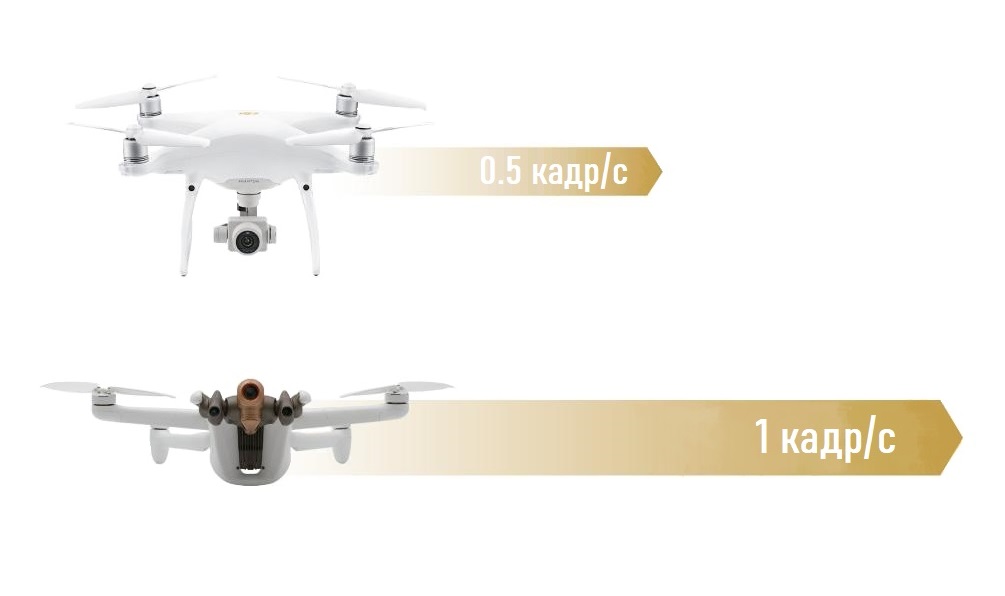
- 48MP 1 fps fotogrametri: dua kali lebih cepat dari pesaing
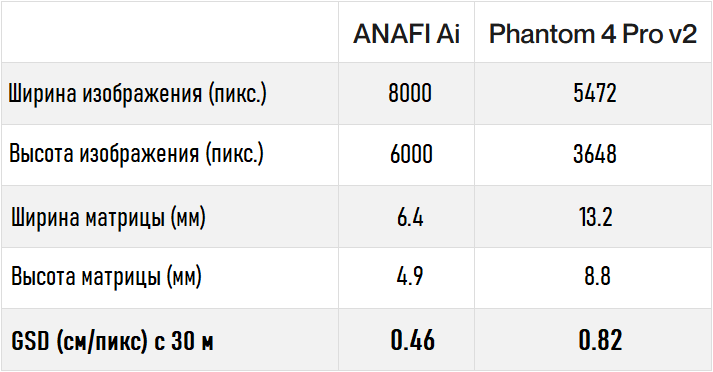
- Akurasi pemotretan: 0,46 cm / pix. GSD pada 30m
- Dukungan Parrot SDK (dengan kemampuan untuk menyematkan kode Anda ke dalam drone menggunakan Air SDK, membuat aplikasi seluler menggunakan Ground SDK, mengonfigurasi stasiun bumi open source menggunakan OpenFlight, berinteraksi dengan Sphinx modern alat simulasi drone serta skrip Python dengan Olympe dan pemrosesan video dan metadata dengan PdrAW)
- Kompatibel dengan perangkat lunak pihak ketiga: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- ANAFI Ai mematuhi Umum Peraturan Peraturan Perlindungan Data Uni Eropa (GDPR)
- Privasi data superior dengan NIST FIPS140-2 Level 3 WISeKey Secure Element dengan Common Criteria sertifikasi EAL5
- Video dan kontrol dilindungi dengan SRTP / DTLS sesuai ke webRTC
- Peralatan kontrol portabel Parrot Skyco baru nroller 4
- Aplikasi seluler baru Parrot FreeFlight 7

Paket
Pengembang menawarkan drone dalam satu konfigurasi, yang akan mencakup:
- Drone ANAFI Ai
- Kasus transportasi kaku
- Peralatan kontrol Parrot Skycontroller 4
- 1 × Smart baterai
- Pengisi Daya USB-PD
- Kit Propeller Cadangan (2CW / 2CCW)
- Kabel Pendamping (USB-C ke Lightning)
- 2 × Kabel Pendamping (USB -C ke USB-C)
- Bagan Kalibrasi

Spesifikasi
Pesawat

Komunikasi
Sistem navigasi
Skycontroller 4

Baterai Cerdas Pesawat
Aplikasi

Kamera

Mode penerbangan otonom
Keamanan siber
Parrot SDK
Selanjutnya, Anda dapat membiasakan diri dengan informasi kunci dari Parrot Anafi Ai, yang akan memungkinkan Anda untuk mempelajari lebih detail tentang potensi mesin yang dinyatakan, serta peningkatan apa yang telah diterapkan dibandingkan dengan versi komersial drone Parrot Anfi Thermal dan drone lainnya dari merek terkemuka.
Penampilan





Komunikasi
4G
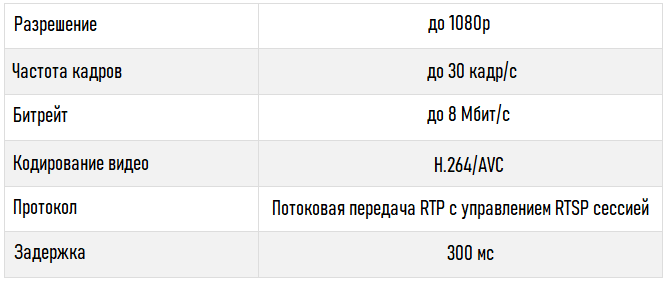
ANAFI Ai termasuk modul radio 4G (selain modul radio Wi-Fi), yang memungkinkan Anda menyiarkan streaming video dalam kualitas 1080p dengan bitrate maksimum 12 Mbps, dengan latensi sangat rendah (300 ms), tanpa batasan jangkauan dan di mana pun di dunia.
Kompatibilitas
Modul ANAFI Ai 4G mendukung lebih dari 28 pita frekuensi, mencakup lebih dari 98% frekuensi yang digunakan di seluruh dunia.
Pengalihan Jaringan Otomatis
Kualitas dan bandwidth jaringan 4G dan Wi-Fi diukur setiap 100 md untuk menyesuaikan streaming dengan kondisi jaringan. Dikombinasikan dengan algoritma perutean, koneksi antara drone dan pengontrolnya tetap terjaga meskipun Wi-Fi sangat terganggu. Dengan demikian, ketika bandwidth efektif (usable bandwidth) Wi-Fi di bawah 1,5 Mbps, sistem akan secara otomatis beralih ke 4G.
Untuk membatasi konsumsi data seluler saat pilot berada dalam jangkauan jaringan Wi-Fi drone, transisi dari 4G ke Wi-Fi juga dilakukan secara otomatis tanpa memutus aliran video.
Maks. jangkauan dengan koneksi 4G
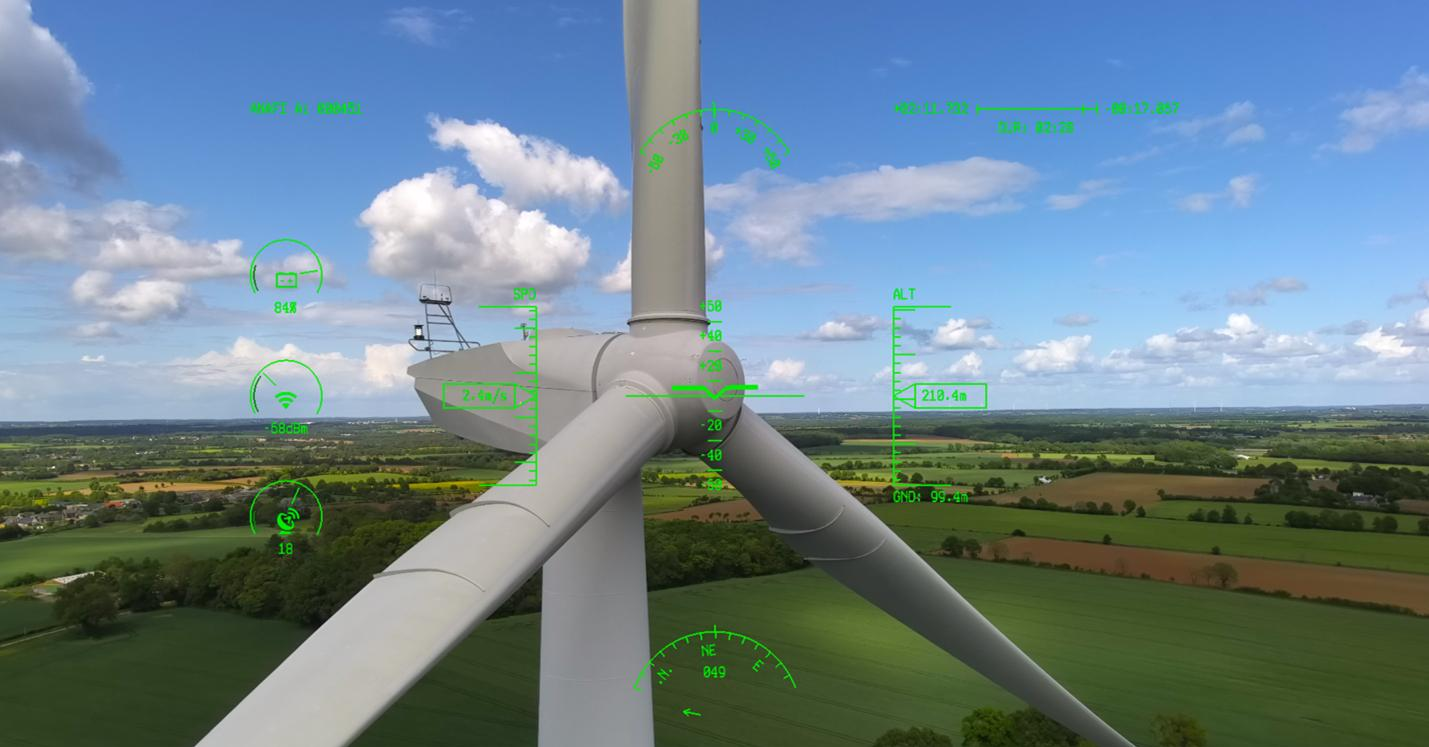
Video dari pengembang menunjukkan maks. jangkauan penerbangan Anafi Ai dengan koneksi 4G satu arah dengan sekali pengisian baterai. Total waktu penerbangan adalah 29 menit pada kecepatan penerbangan horizontal rata-rata 58 km / jam (16 m / s). Selama ini, drone mampu menempuh jarak 27 km. Anda juga dapat melihat bahwa penerbangan dilakukan dalam kondisi angin kencang, yang terus-menerus diperingatkan oleh sistem drone.
Menerapkan algoritma pengoptimalan aliran video
Kontrol kemacetan 4G
Algoritma kontrol kemacetan memungkinkan:
- Mengukur kehilangan paket di seluruh siklus jaringan.
- Ukur penundaan (waktu pulang pergi).
- Sesuaikan bandwidth menurut dua parameter ini.
Tujuan akhir dari algoritma ini adalah untuk memaksimalkan bandwidth yang tersedia sambil mempertahankan latency serendah mungkin. Algoritma ini diimplementasikan pada setiap antarmuka yang tersedia di drone, masing-masing dengan parameternya sendiri, dioptimalkan sesuai dengan jaringan. Berdasarkan informasi yang diberikan oleh algoritma ini, manajer tautan membuat keputusan perutean dan antarmuka aktif.
Mengontrol drone melalui koneksi 4G
ANAFI Ai terhubung ke remote kontrol melalui 4G dalam waktu kurang dari 30 detik jika drone berada di luar jangkauan Wi-Fi, dan dalam waktu kurang dari 15 detik jika drone berada dalam jangkauan Wi-Fi. Dan juga koneksi 4G menyediakan:
- Deteksi dan inisiasi koneksi berdasarkan protokol VOIP SIP.
- Gunakan server relai untuk membuat koneksi melalui jaringan aman.
Performa streaming video
- Latensi: 300 md.
- Keamanan: video dan kontrol dilindungi dengan SRTP / DTLS menurut webRTC.
- Antena: 28 pita LTE dari 700 MHz hingga 2,6 GHz.

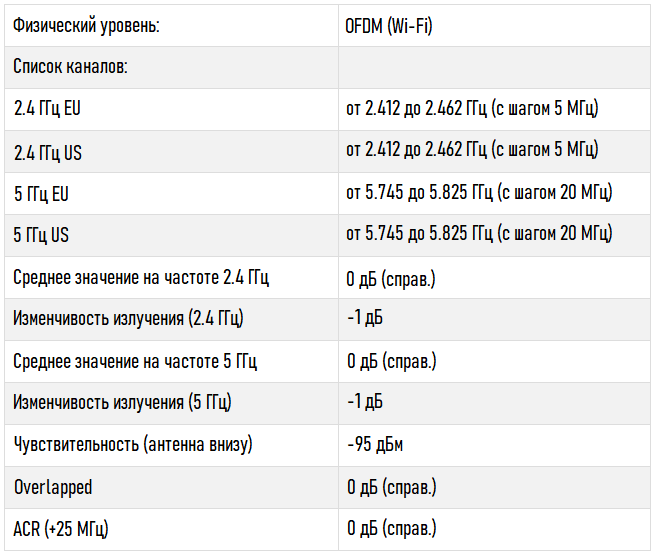
Wi-Fi
Sistem transmisi omni-directional
- ANAFI Ai memiliki 4 antena reflektor arah (dengan penguatan antena: 2,5 dBi / dtk). Drone menentukan pasangan antena terbaik berdasarkan orientasi dan posisinya relatif terhadap posisi pilot.
- Dengan penguatan rekombinasi sebesar 3,5 / - 1,5 dBi pada bidang horizontal drone, penguatan RF ANAFI Ai sangat seragam.
- Radiasi antena hilir telah ditingkatkan sebesar 4 dB melalui ANAFI.
Desain eksternal radio berdaya tinggi
Bagian depan radio memaksimalkan daya di dasar antena dengan linearitas yang sangat baik dan sensitivitas (-94 dBm pada 6,5 Mbps) untuk mencapai daya pembatas FCC maksimum.

Keandalan Wi-Fi
Parameter 802.11
bandwidth rendah, latensi rendah, variabilitas tingkat penerimaan karena kecepatan drone, jarak jauh, adanya gangguan. Parameter ini mencakup agregasi, percobaan ulang, teknologi MiMo (STBC), laju data bingkai kontrol, dan kondisi pemutusan sambungan.
Pencegahan Interferensi Cerdas
ANAFI Ai memiliki algoritma untuk penghapusan saluran (2,4 GHz dan 5 GHz dual band) jika terjadi gangguan.
Adaptasi dan pemantauan aliran
ANAFI Ai terus memantau status tautan 4 Hz dan dapat mendeteksi interferensi. Ini memungkinkan Anda untuk secara dinamis mengoptimalkan bandwidth dan ukuran paket yang ditransmisikan. Ini juga memberi tahu pilot jika dia berada di lingkungan yang sangat macet atau akan kehilangan sinyal.
Pengurangan bandwidth
Pada batas jangkauannya dan jika kondisi memungkinkan, ANAFI Ai dapat beralih ke bandwidth 10 MHz untuk meningkatkan sensitivitasnya sebesar 3 dB dan meningkatkan jangkauan sebesar 40%.

Indikator radio
Siaran video
Indikator tautan video
Menerapkan algoritma pengoptimalan aliran video
Streaming Parrot Gen4 (generasi ke-4)
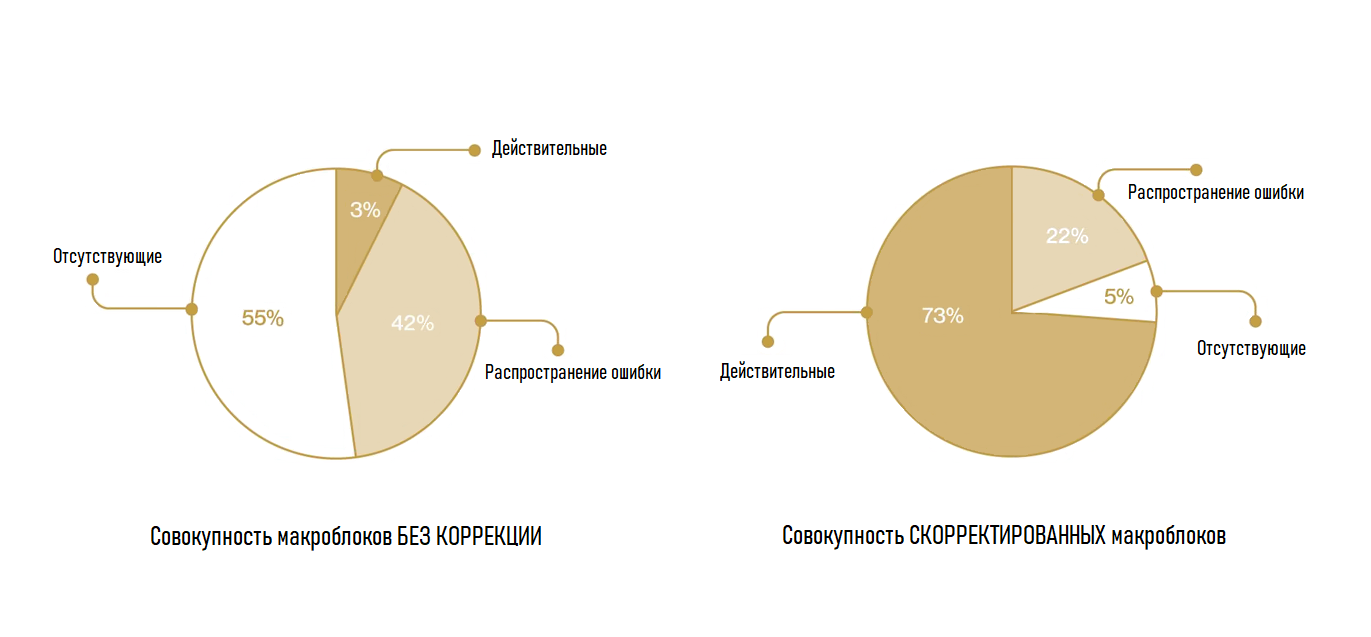
Algoritme ini mengurangi dampak visual dari kehilangan jaringan dan menyediakan interoperabilitas semua dekoder, sambil memberikan aliran yang lengkap secara sintaksis: bagian gambar yang hilang direkonstruksi sebagai bagian yang hilang, identik dengan yang ada di gambar referensi.
Dengan demikian, kesalahan terkandung di area yang rentan terhadap kehilangan, dan tidak berlaku untuk seluruh gambar.
Grafik di bawah ini menunjukkan tingkat keberhasilan untuk decoding macroblock pada kehilangan jaringan 5% - dengan dan tanpa fitur streaming lanjutan ANAFI Ai. Algoritma memastikan decoding yang benar dari 75% dari macroblocks. Mereka memungkinkan pengguna untuk melanjutkan misi mereka tanpa membekukan layar atau kehilangan streaming.
Kontrol Kemacetan
Algoritme juga mengevaluasi lingkungan Wi-Fi dan radio untuk mengantisipasi dan menghindari kehilangan paket dan kemacetan jaringan, yang membantu mengurangi latensi. Algoritme didasarkan pada perkiraan kapasitas saluran, dihitung berdasarkan kecepatan data dan tingkat kesalahan pada lapisan fisik; maka itu mempengaruhi pengkodean jaringan dan parameter enkapsulasi.
Metadata
Metadata ditransmisikan dengan aliran video. Secara khusus, mereka mengandung elemen telemetri drone (posisi, ketinggian, kecepatan, tingkat baterai, dll.) dan metrik video (sudut kamera, nilai eksposur, bidang pandang, dll.).
Sinkronisasi gambar dan metadata terbuka melakukan fungsi penentuan posisi yang tepat di peta, melacak instrumen penerbangan di HUD, atau mengaktifkan elemen augmented reality.
Metadata disertakan menggunakan metode standar (ekstensi header RTP); format data yang ditentukan oleh Parrot adalah open source: tersedia di ANAFI Ai SDK.
Kamera

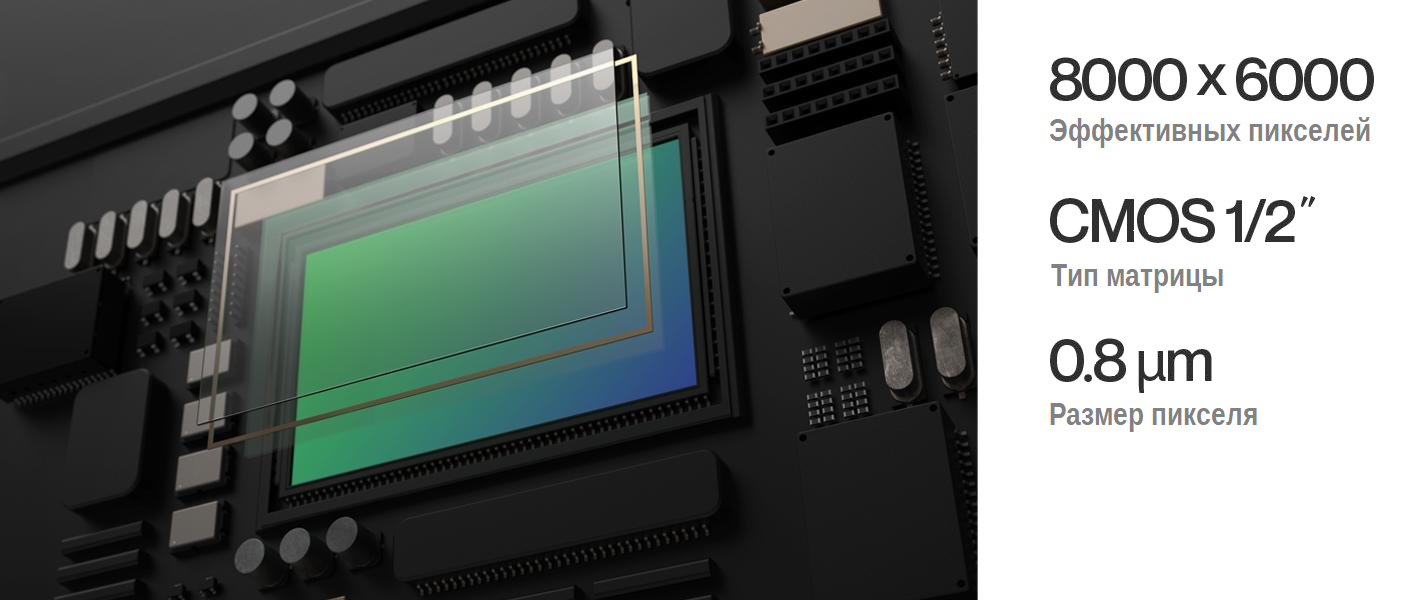
Sensor 48MP
Matriks ANAFI Ai mencakup sejumlah besar megapiksel untuk fotografi udara yang detail.
Ini menggunakan teknologi array filter warna Quad Bayer, di mana kelompok 4 piksel yang berdekatan memiliki warna yang sama. Dengan demikian, pengambilan HDR real-time dapat diperoleh dalam mode foto dan video dengan menambahkan sinyal dari empat piksel yang berdekatan.
Rentang dinamisnya adalah 4 kali lipat dari matriks Bayer standar. Bahkan adegan yang kompleks dapat difilmkan dengan penyorotan minimal atau hilangnya detail bayangan.
Lensa
Lensa ANAFI Ai telah dikembangkan secara khusus untuk Parrot. Ini menggabungkan 6 elemen asferis dan dioptimalkan untuk mengurangi suar optik. Lensa ini memberikan 68 ° HFoV dalam mode video standar dan 64,6 ° HFoV dalam mode foto standar.

Mode video
ANAFI Ai menangkap video 4K yang mulus pada 60 frame per detik, termasuk P-Log, dan juga HDR10 4K video hingga 30fps. Tabel di bawah ini mencantumkan semua mode video ANAFI Ai.

Encoding video
Pengguna dapat memilih antara H.264 (AVC) dan H.265 (HEVC).
Semua resolusi menggunakan format piksel berikut:
- YUV420p (8-bpc BT.709 ruang warna) untuk mode standar dan HDR8.
- YUVJ420p (8 bit / komponen, rentang penuh - ruang warna BT.709) untuk gaya P-log.
- YUV420p10 (10bpc BT.2020 ruang warna) untuk perekaman HDR10, hanya H.265.
HDR
Saat merekam video dalam HDR8 dan HDR10, ANAFI Ai mencakup rentang dinamis 14EV. Format HDR10 menawarkan kecerahan maksimum 1000 nits dan kedalaman warna 10 bit. Ini memberikan satu miliar gamut warna versus 16 juta untuk rentang dinamis standar. Dibandingkan dengan HDR8, HDR10 menghasilkan gambar dua kali lebih terang dengan peningkatan kontras yang sesuai. HDR8 dapat ditampilkan di layar standar apa pun, sedangkan HDR10 untuk TV dan layar HDR10.
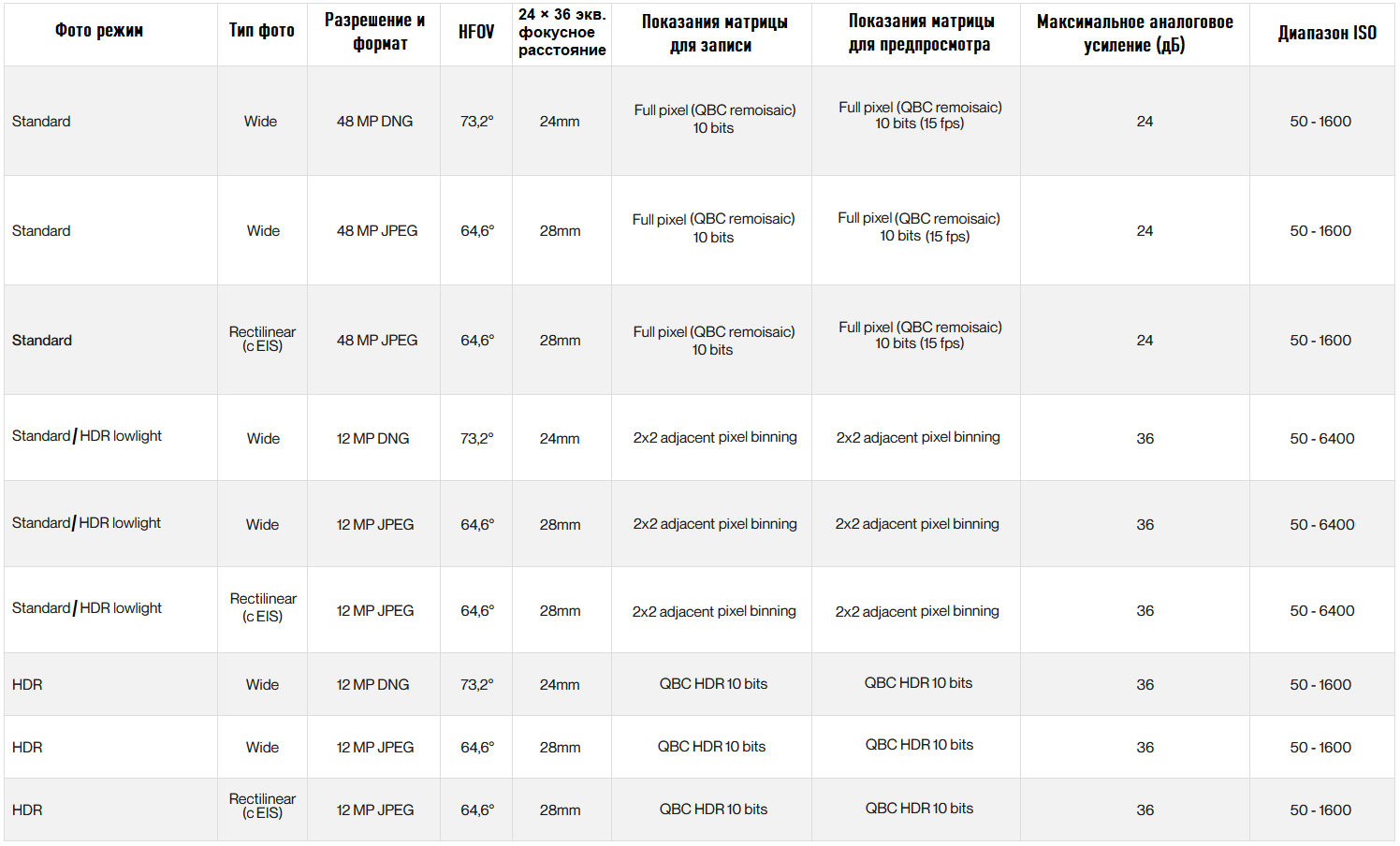
Mode Foto
Deskripsi Mode
Bagian Kontrol Mode berisi pengaturan yang memengaruhi jumlah bidikan yang diambil setiap kali rana dilepaskan.
Mode pengambilan tunggal
Mode pengambilan tunggal standar. Setelah setiap pelepasan rana, gambar yang diambil segera diproses oleh sistem.
Mode Bracketing
Pengguna dapat memotret serangkaian 3, 5 atau 7 frame dengan eksposur berbeda untuk setiap frame. Prasetel berikut tersedia:
- [-1 EV, 0, 1 EV] (pengaturan default)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

Mode burst
Mode burst akan memungkinkan pengguna untuk mengambil burst 10 frame dalam 1 detik.
Mode Panorama
Mode Panorama mencakup empat pemotretan panorama yang berbeda:
- Spherical (360 °) adalah mode panorama yang mencakup tiga opsi untuk memotret panorama bulat: Sphere / Little Planet / Tunnel.
- Horizontal (180 °)
- Vertikal (109 °)
- Superwide - super baru mode penggabungan 9 gambar lebar (HFOV 110 °, panorama lurus)
Untuk detail tentang spesifikasi mode panorama, lihat tabel di bawah ini:

Mode selang waktu
Mode ini memungkinkan Anda mengambil gambar pada interval waktu tetap berikut:
- 48MP: 1, 2, 4, 10, 30 atau 60 detik.
- 12MP: 0,5, 1, 2, 4, 10, 30 atau 60 detik.
Mode Selang GPS
Mode foto ini dikembangkan untuk inspeksi dan fotogrametri. Hal ini memungkinkan Anda untuk mengambil gambar pada interval jarak tetap berikut: 5, 10, 20, 50, 100 atau 200 meter.
Tabel di bawah ini menunjukkan mode dan resolusi pengambilan gambar diam, termasuk mode Pembacaan Sensor:
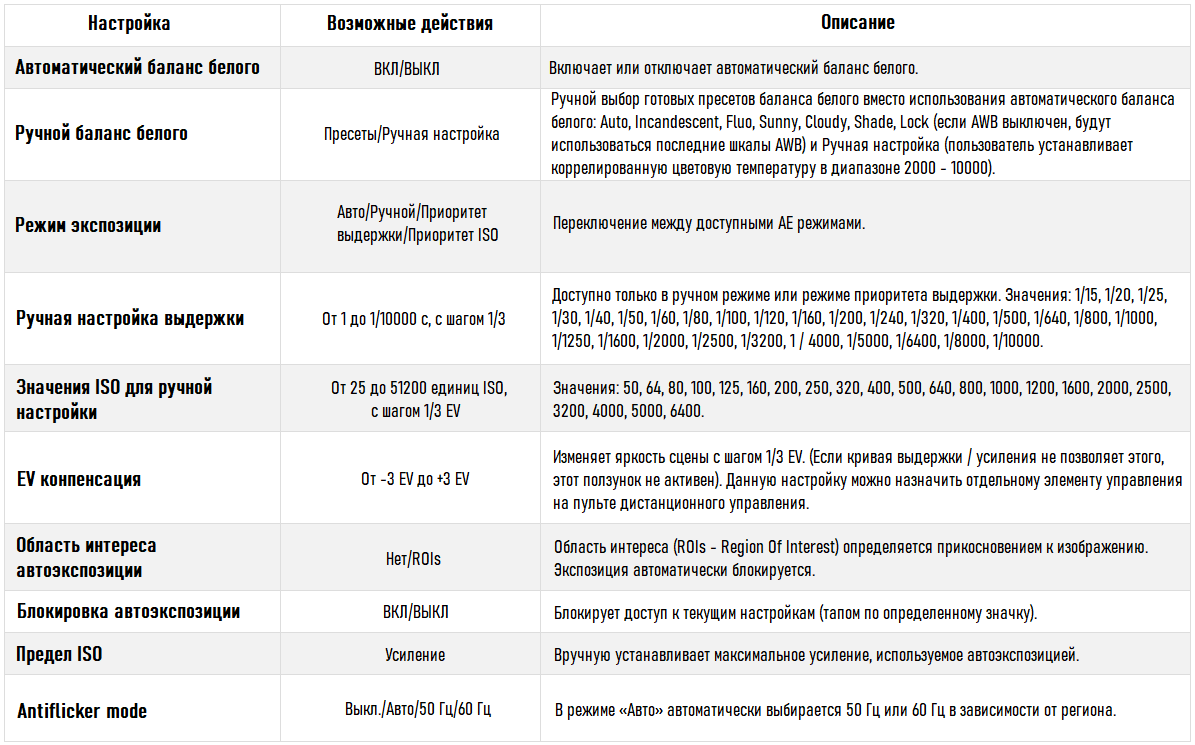
Pengaturan
Berikut ini tabel mencantumkan pengaturan yang tersedia untuk setiap mode.
Zoom 6x
Zoom tersedia di semua mode foto dan video. Dikombinasikan dengan sensor 48 megapiksel, algoritme penajaman yang presisi menghasilkan gambar definisi tinggi bahkan saat menggunakan zoom digital 6x. Pengguna ANAFI Ai sekarang dapat melihat detail 1cm dari jarak 75m. Jumlah piksel yang tinggi juga memungkinkan video 4K di-crop ke 1080p tanpa kehilangan kualitas.

Stabilisasi hibrida
ANAFI Ai memiliki stabilisasi paling akurat di pasar UAV mikro.
Ini menggabungkan stabilisasi gabungan:
- mekanik 3-sumbu (3-sumbu mekanisme. Gimbal)
- Elektronik 3-sumbu (EIS)
Stabilisasi mekanis menstabilkan sumbu penunjuk kamera terlepas dari posisi penerbangan drone. Stabilisasi Gambar Elektronik mengoreksi efek getaran mikro untuk frekuensi di atas 100 Hz, yang tidak dapat ditangani oleh penggerak mekanis.
Gimbal kamera utama
Stabilisasi mekanis memungkinkan Anda menstabilkan dan mengarahkan sumbu horizontal tampilan kamera di ketiga sumbu.
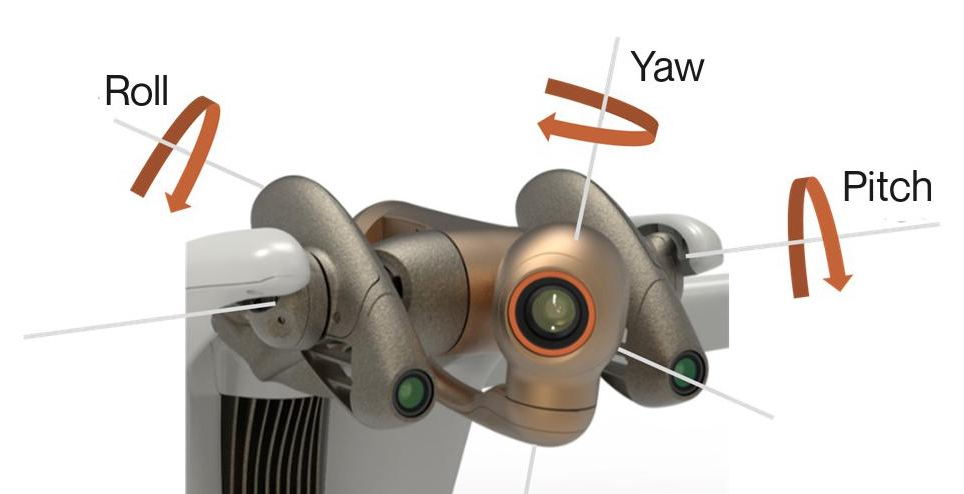 3 sumbu mekanisme rotasi. suspensi kamera utama ANAFI Ai.
3 sumbu mekanisme rotasi. suspensi kamera utama ANAFI Ai.
Fitur Utama
- Gimbal Mekanik 3 Sumbu untuk Kamera Utama
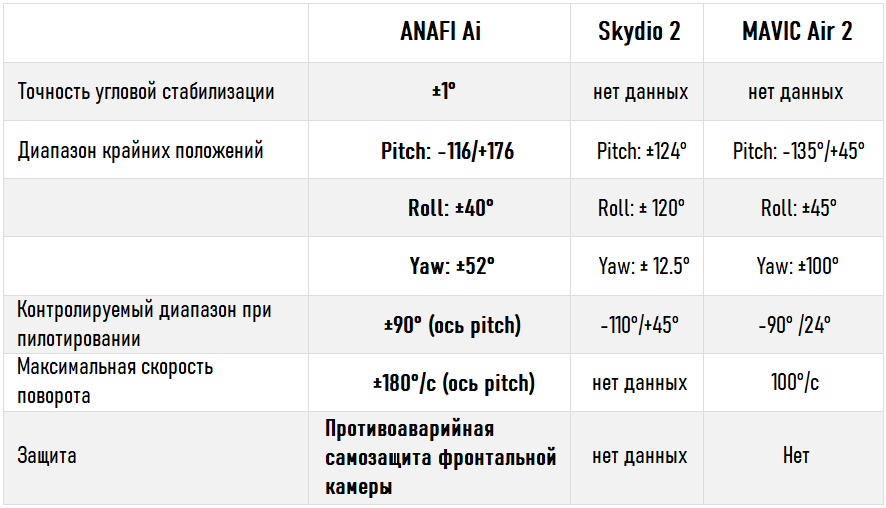
- Offset Vertikal 292 °, Bidang Pandang -116 ° hingga 176 °
Kinerja Gimbal
- Algoritme EIS mengoreksi efek goyangan dan distorsi lensa sudut lebar dan juga menampilkan gambar digital 3-sumbu stabilisasi (Roll, Pitch dan Yaw).
- Metode ini terdiri dari penerapan transformasi geometrik gambar. Transformasi geometris dikaitkan dengan cap waktu dan posisi yang tepat berkat IMU.
- Transformasi geometris diterapkan pada setiap gambar sesuai dengan distorsi optik, getaran, dan gerakan unit kamera yang diukur.
Rentang pivot 292 °
Kamera memiliki rentang pivot horizontal -116 ° / 176 ° di sekitar sumbu pitch, sehingga memberikan pengamatan di atas dan di bawah drone, yang merupakan peluang unik di pasar UAV mikro.
![]()
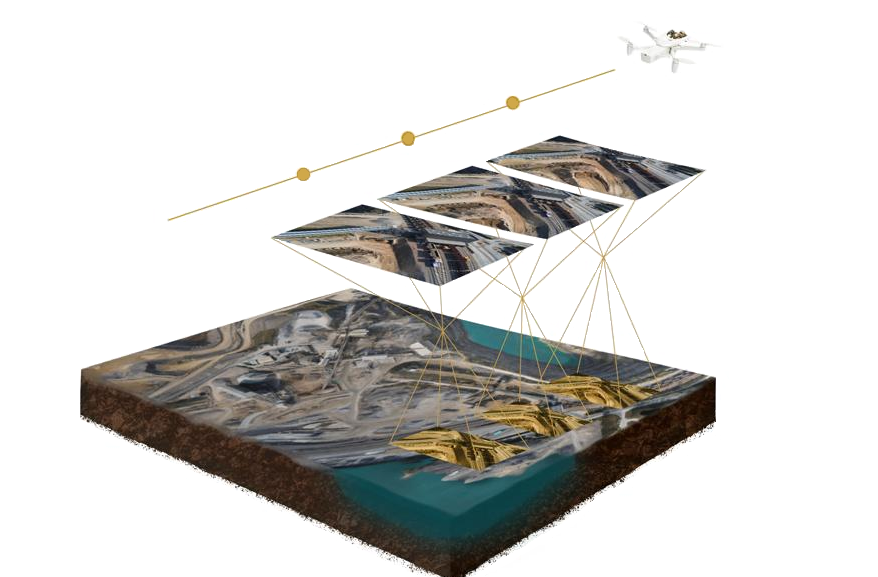
Fotogrametri
Fotografi udara dengan kendaraan udara tak berawak mengubah cara spesialis melakukan inspeksi dan survei. Metode fotogrametri digunakan untuk memproses gambar yang dikumpulkan oleh UAV untuk membuat model 2D dan 3D, yang nantinya memungkinkan pelanggan untuk menjadwalkan pemeliharaan objek yang disurvei secara tepat waktu.
4G memberikan keandalan yang belum pernah terjadi sebelumnya dari tautan data drone. Pengguna dapat mengoperasikan UAV di area yang luas, dekat struktur logam, bangunan, tanpa takut kehilangan komunikasi.
Inspeksi dan Pemetaan
Dengan menggabungkan AI dari drone ANAFI Ai dengan platform online PIX4Dinspect, pengguna akan dapat melakukan inspeksi lebih cepat dan lebih efisien daripada sebelumnya. Algoritme pembelajaran mesin mengenali antena di menara sel, menentukan ukuran, tinggi, kemiringan, azimuth, dan vertikalitasnya.
Klik pada gambar di bawah ini untuk melihat model demo 3D yang dihasilkan oleh ANAFI Ai.
Contoh #1

Contoh #2
Matriks terbaik di kelasnya
Kamera drone ANAFI Ai dilengkapi dengan sensor CMOS 48MP 1/2-inci yang dibuat menggunakan teknologi filter warna Quad Bayer, yang lebih cocok untuk inspeksi dan fotogrametri. Matriks yang digunakan memungkinkan Anda mendapatkan gambar yang detail dengan rentang dinamis yang lebar.
Foto Resolusi Tinggi
ANAFI Ai mampu menghasilkan gambar diam 48 megapiksel, sehingga menangkap semua detail dalam resolusi tinggi dan menciptakan titik awan kepadatan tinggi.
Misi inspeksi membutuhkan kemampuan untuk mengidentifikasi detail kecil seperti nomor seri, konektor, noda karat, dan retakan yang baru terjadi.
Rentang dinamis lebar
10 stop rentang dinamis dalam mode standar, 14 stop dalam mode HDR. Gradasi gambar yang optimal sangat penting untuk menciptakan titik awan yang konsisten dan rekonstruksi 2D atau 3D berkualitas tinggi.
55% lebih detail daripada sensor 1-inci
Sensor Quad Bayer 48MP 1/2-inci ANAFI Ai lebih tajam daripada sensor 20MP 1-inci yang digunakan di sejumlah drone profesional modern. Gambar berikut dari pemeriksaan atap ANAFI Ai dan DJI Phantom 4 Pro V2.0 pada ketinggian yang sama dengan jelas menunjukkan fakta ini.

Ideal untuk inspeksi
Gimbal ANAFI Ai mencakup sistem stabilisasi hibrida 6-sumbu (elektronik mekanis) yang mengkompensasi fluktuasi penerbangan dan memastikan ketajaman gambar. Kamera ANAFI Ai memiliki rentang yang dapat disesuaikan dari -90 ° hingga 90 °, menjadikannya instrumen udara yang ideal untuk melihat bagian bawah dasar jembatan.
Kemiringan yang dapat dikontrol ± 90 °
Akurasi
ANAFI Ai memungkinkan pengguna untuk mencapai GSD 0,46 cm / px dari ketinggian 30 m, yang berarti akurasi relatif planimetri hingga 0,92 cm
Sebagai perbandingan, pada ketinggian yang sama DJI Phantom 4 Pro V2 memberikan GSD hanya 0,82 cm / px. Dengan kata lain, ANAFI Ai dapat memetakan target yang sama, terbang lebih dari 1,5 kali lebih tinggi dari Phantom, dengan tingkat detail yang setara.
Kemampuan AI dan 4G
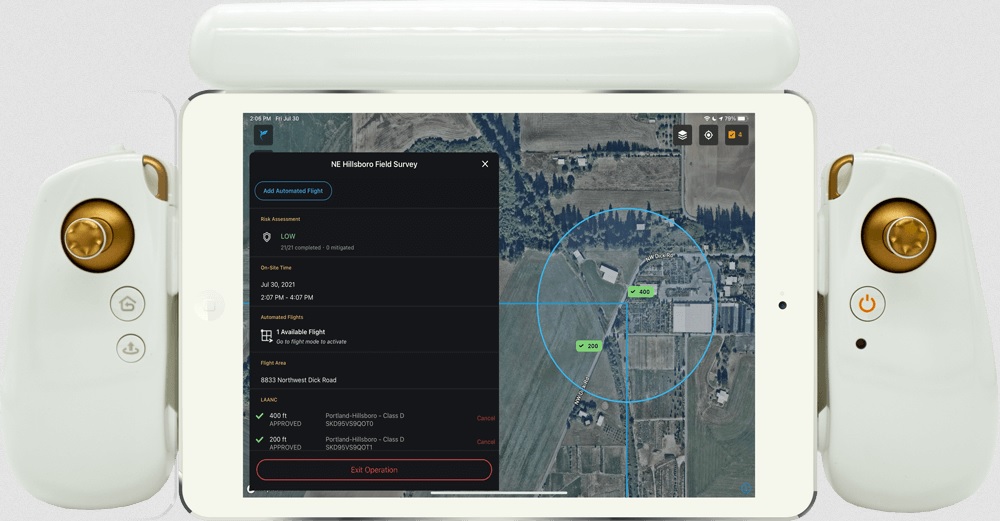
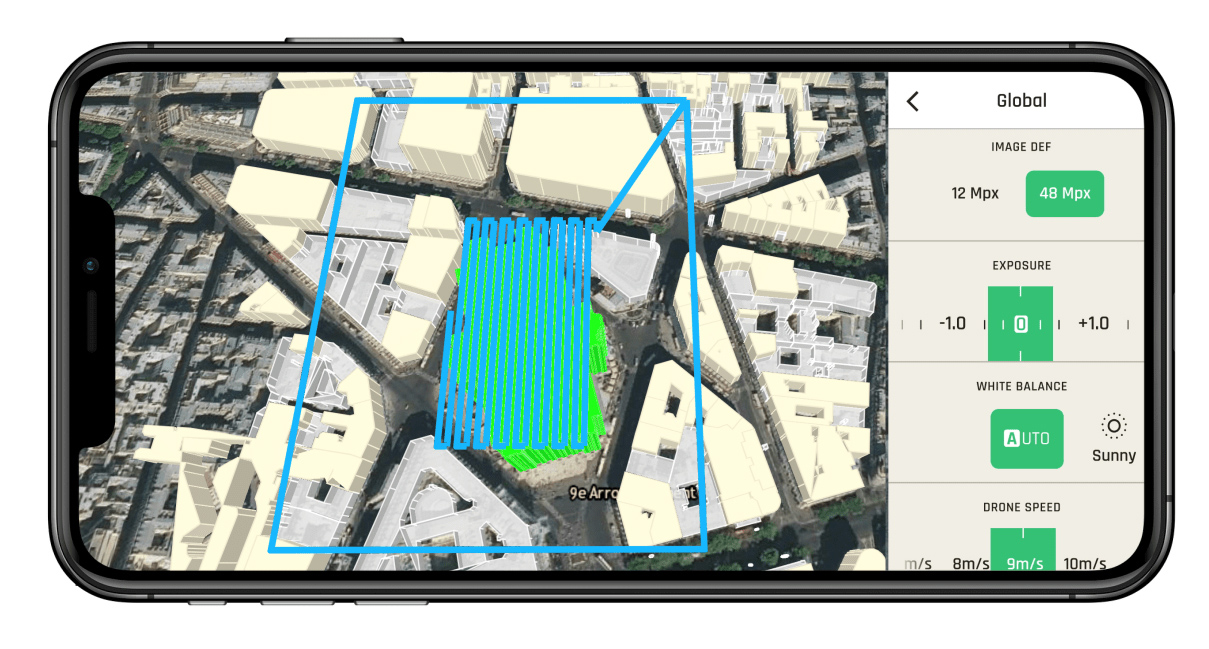
Satu aplikasi. Any Flight Plan
Potensi aplikasi seluler FreeFlight 7 memungkinkan pengguna untuk meluncurkan semua misi survei, inspeksi, dan fotogrametri.

Mode penerbangan fotogrametri yang tersedia
Mode penerbangan fotogrametri berikut sekarang tersedia di aplikasi seluler FreeFlight 7:
- Kisi
- Kisi-ganda
- melingkar
Buat rencana penerbangan dalam satu ketukan
Satu ketukan di peta interaktif 3D FreeFlight adalah semua yang Anda butuhkan untuk gedung pemindaian cepat. Kecerdasan buatan secara otomatis menentukan parameter dan lintasan penerbangan yang optimal. Gambar 48MP dengan georeferensi akurat dari sensor ANAFI Ai (IMU, GNSS, dan Waktu Penerbangan) memungkinkan rekonstruksi 3D yang akurat.
 Rencana penerbangan otomatis dibuat dengan satu ketukan di pendaftaran tanah 3D.
Rencana penerbangan otomatis dibuat dengan satu ketukan di pendaftaran tanah 3D.
- Latar belakang kartografi FreeFlight 7 berasal dari perangkat lunak ArcGIS. Representasi bangunan 3D didasarkan pada data OpenStreetMap yang mencakup kota-kota di seluruh dunia.
- Sistem visualisasi memastikan keamanan rencana penerbangan yang diberikan: pengguna tidak perlu khawatir tentang rintangan. ANAFI Ai menghindari mereka secara mandiri.
Penerbangan otonom
Sistem sensor omnidirectional ANAFI Ai, berdasarkan penglihatan stereoskopik, secara otomatis mengarahkan dirinya ke arah perjalanan.

Drone mendeteksi rintangan yang berjarak 30 meter. Teknologi AI terus-menerus membangun dan memperbarui kisi pengisi saat menjalankan rencana penerbangan yang diberikan. Ini mewakili lingkungan drone dalam voxel.
Algoritma menentukan lintasan terbaik untuk menghindari bertabrakan dengan rintangan sementara drone tetap fokus pada targetnya: misi penerbangan yang ditugaskan.

Koneksi 4G
ANAFI Ai adalah mikrodron komersial pertama yang dilengkapi dengan modul 4G. Ini mencakup lebih dari 98% frekuensi yang digunakan di seluruh dunia.

Survei saluran listrik tegangan tinggi. Dibidik dengan ANAFI Ai, diedit dengan Pix4Dmatic. Ukuran pemandangan: 4060 × 60 × 70 m. Jumlah gambar: 2172. GSD: 1,3 cm / pix. Tinggi: 90 m Tumpang tindih depan / samping: 90% / 65%.
Drone ini dapat dengan mulus beralih dari Wi-Fi ke 4G dan sebaliknya, sehingga memberikan koneksi yang paling andal, yang pada gilirannya menjamin:
- Kemampuan untuk melakukan penerbangan BVLOS
- Koneksi stabil bahkan saat terbang di lingkungan dengan rintangan dan bangunan
- Terbang aman di lingkungan kebisingan tinggi
- Kualitas tautan video 1080p @ 30 fps
- Unggah langsung gambar ke server cloud

Optimalisasi waktu penerbangan
Menurut pengembang, penghematan waktu yang signifikan dicapai karena gambar yang tinggi karakteristik ANAFI Ai:
- 48MP memungkinkan drone terbang lebih dari 1,5 kali lebih tinggi daripada drone dengan sensor 20MP 1 inci, sambil mencapai GSD yang sama. Dengan kata lain, ketinggian yang lebih tinggi dan misi yang lebih cepat berjalan seiring.
- Fotografi 1 fps: ANAFI Ai memotret dua kali lebih cepat Autel EVO 2 dan DJI Phantom 4 Pro V2.0.
Transfer dalam penerbangan 4G ke PIX4Dcloud
Dalam proses pembuatan model digital dari foto udara drone, mentransfer file, dan memproses foto adalah dua tugas yang memakan waktu. ANAFI Ai membantu pengguna mempercepat alur kerja mereka. Secara khusus, sistem drone memungkinkan:
- Mentransfer gambar ke server yang aman secara langsung selama penerbangan menggunakan koneksi 4G drone.
- Segera mulai menghitung objek di akhir penerbangan: orthomosaics, point cloud, model elevasi dan mesh bertekstur.
- Bagikan peta 2D dan model 3D berkualitas survei dengan mudah kepada karyawan dan pelanggan.
Kompatibilitas Suite PIX4D
ANAFI Ai sekarang sepenuhnya kompatibel dengan rangkaian unik aplikasi fotogrametri seluler, desktop, dan cloud yang terdiri dari:
Fotogrametri atau lidar
Mengapa memilih fotogrametri untuk survei dan inspeksi? Selain aksesibilitas dan kemudahan penggunaan, fotogrametri udara adalah pilihan terbaik ketika interpretasi visual data diperlukan.
Pro fotogrametri
- Menyediakan beberapa visualisasi: orthomosaic, color point cloud, mesh bertekstur.
- Membuat awan titik dengan kepadatan lebih tinggi, yang masing-masing berisi sejumlah besar informasi (tinggi, tekstur, warna).
- Melampaui LIDAR dalam akurasi rendering 2D dan 3D fotorealistik - LIDAR tidak memberikan detail kontekstual tingkat tinggi.
Kontra LIDAR
- Biayanya 100 kali lebih mahal daripada UAV dengan matriks RGB.
- Kompleksitas pemrosesan data dan kemungkinan kesalahan interpretasi.
- Menambahkan informasi warna dimungkinkan, tetapi memperumit prosesnya.
- LIDAR hanya menghasilkan point cloud dan ditujukan untuk kasus dan situasi tertentu.
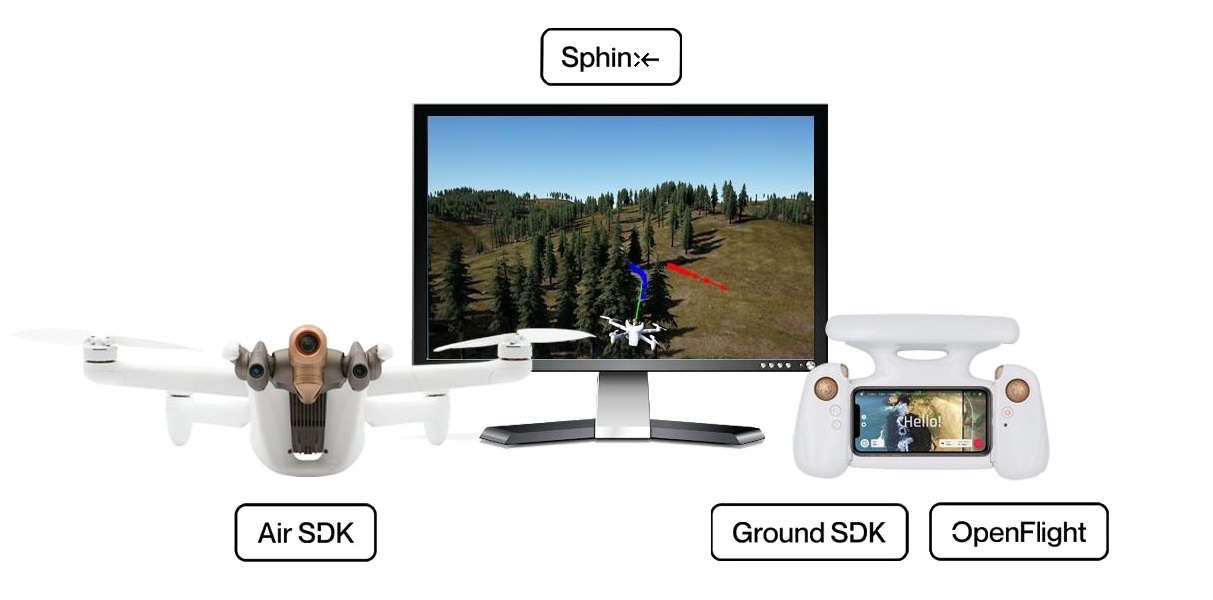
SDK
Parrot Software Development Kit adalah seperangkat alat dan perangkat lunak sumber terbuka untuk pengembang. Sejak pembuatan drone pertama A. R. Drone, perangkat lunak sumber terbuka perusahaan menopang platform dan alat pengembang, dan Parrot
Pengembang mengklarifikasi bahwa semua sumber daya SDK perusahaan tersedia secara gratis, tanpa registrasi dan pelacakan, di portal " Parrot Portal Pengembang"... Anda juga dapat bergabung dengan ribuan pengembang di forum Parrot tempat Anda dapat mendiskusikan topik terkini secara langsung dengan para insinyur perusahaan.
Air SDK
Jalankan kode Anda di ANAFI Ai
Air SDK menyediakan arsitektur teknologi revolusioner untuk mengunduh dan menjalankan kode langsung di ANAFI Ai. Pengembang dapat memprogram misi penerbangan yang dirancang khusus dengan akses ke semua sensor drone, antarmuka koneksi, dan fungsi autopilot.
Air SDK menyediakan akses onboard ke:
- Semua sensor (IMU, GPS, TOF) dan mode penerbangan
- Aliran video dan metadata dengan semua kamera
- Antarmuka komunikasi Wi-Fi, 4G, USB
- Peta kedalaman dan kisi pengisi
- Pembuatan lintasan penghindaran rintangan
Setiap pengembang dapat:
- Mengubah status drone dengan membuat misi penerbangan
- Mengubah mode navigasi
- Menambahkan proses Linux yang disematkan (untuk misalnya, mentransfer data melalui saluran 4G atau menggunakan visi komputer)
Air SDK mendukung bahasa pemrograman C atau Python. Air SDK dilengkapi dengan panduan instalasi terperinci dan dokumentasi API. Banyak contoh aplikasi menggambarkan semua kemungkinan yang ditawarkan oleh arsitektur uniknya.
Ground SDK
Membangun Aplikasi Seluler yang Kuat
Ground SDK adalah platform perangkat lunak Ground Control Station (GCS) untuk perangkat seluler (baik iOS dan Android didukung). Ini memungkinkan pengembang mana pun untuk membuat aplikasi seluler untuk ANAFI Ai untuk kontrol drone selanjutnya langsung dari perangkat seluler. Semua fungsi BVS (kontrol, video, pengaturan) tersedia melalui API yang mudah digunakan dan didokumentasikan sepenuhnya.
OpenFlight
Open Source Ground Control Station
Untuk pertama kalinya, Parrot membuka source code untuk aplikasi ground control station-nya. OpenFlight adalah inti dari aplikasi FreeFlight 7 open source kami yang terkenal. Hal ini memungkinkan pengembang untuk fokus pada penambahan fungsionalitas mereka sendiri dan segera memiliki aplikasi yang terlihat profesional yang siap dipublikasikan ke AppStore.

OpenFlight berisi:
- Semua UX FreeFlight 7
- Semua pengaturan antarmuka
- Kode untuk visualisasi 3D real-time dari hambatan
- Kode untuk mengelola komunikasi 4G
- OpenFlight diterbitkan di bawah lisensi BSD-3 dengan panduan instalasi lengkap dan dokumentasi yang komprehensif.
Sphinx
Simulasi Fotorealistik 3D
Parrot Sphinx adalah alat simulasi drone canggih. Insinyur burung beo menggunakannya untuk mengembangkan dan menguji semua fitur ANAFI Ai. Konsep umumnya adalah untuk mensimulasikan firmware sebenarnya dari drone dengan semua sensornya dalam lingkungan yang realistis secara visual dan fisik.

Parrot Sphinx memungkinkan:
- Simulasikan semua kamera dan sensor
- Simulasikan peta kedalaman dan segmentasi gambar
- Menavigasi banyak adegan 3D realistis
- Sambungkan ke berbagai jenis kendali jarak jauh
- Gunakan skrip untuk mengontrol simulasi
- Tambahkan pejalan kaki dan kendaraan
- Visualisasikan dan rekam data penerbangan
- Sesuaikan sensor pesawat dan elemen fisik di sekitarnya
- Kontrol faktor waktu nyata
Parrot Sphinx dibangun berdasarkan standar canggih komponen:
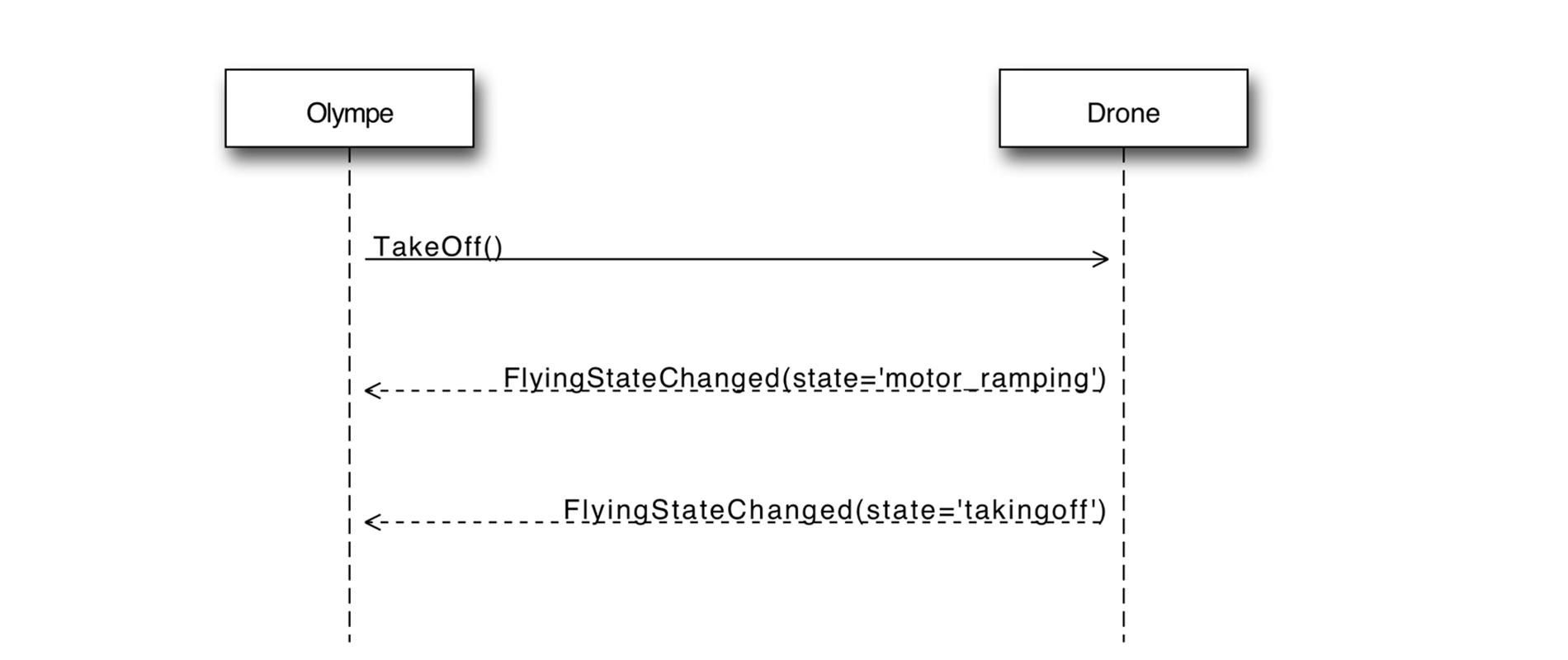
Olympe
Python untuk mengontrol ANAFI Ai
Olympe menyediakan antarmuka pemrograman pengontrol Python untuk ANAFI Ai. Tujuan awal Olympe adalah untuk berinteraksi dengan lingkungan pemodelan Sphinx. Olympe juga dapat mengontrol ANAFI Ai fisik dari komputer jarak jauh.
Kerangka kerja Olympe memungkinkan:
- Sambungkan ke ANAFI Ai simulasi atau fisik
- Kirim pesan perintah (percontohan, orientasi kamera, Kembali ke rumah, Flight Plan)
- Mulai dan hentikan streaming video dari semua kamera
- Rekam streaming video dan metadata yang disinkronkan [980)
- Melakukan operasi kriptografi
- Menyimpan dan melindungi informasi rahasia
- Gambar yang ditandatangani tersebut diambil oleh kendaraan udara tak berawak yang ditunjukkan.
- Baik gambar itu sendiri maupun metadatanya tidak diproses (secara sukarela atau tidak) - metadata, juga dikenal sebagai EXIF dan XMP, berisi informasi tentang tanggal, waktu, dan lokasi gambar.
- Pesawat nomor seri
- Nomor seri baterai
- Versi pesawat dan firmware baterai
- Versi perangkat keras pesawat dan baterai
- Model perangkat
- FreeFlight 7 Rilis Versi
- Peringatan: Baterai, Autopilot, Sensor
- Komunikasi: sambungkan / putuskan, mulai streaming, peringatan interferensi, sinyal lemah
- Kamera: statistik streaming, perubahan pengaturan
- Penerbangan: perubahan status (lepas landas, mendarat, melayang, dll.), aktivasi tugas penerbangan (rencana penerbangan, fotogrametri)
- Timelapse- snapshot dan (setiap 2 menit sekali)
- Deep Learning (memetakan lebih banyak objek, lanskap untuk meningkatkan otonomi penerbangan, pelacakan, penghindaran rintangan)
- Stereovision (peta kedalaman)
- Gambar dipicu berdasarkan peristiwa
- Awal dan akhir pernyataan melayang yang tepat, pendaratan yang tepat
- Drone crash
- Wajah secara otomatis kabur selama transmisi
- Waktu penerbangan lebih dari 32 menit
- Berkat karakteristik aerodinamis yang dioptimalkan dari badan pesawat dan sistem propulsi ANAFI Ai, kecepatan maksimum dalam penerbangan ke depan adalah 61 km / jam, dengan penerbangan samping dan penerbangan mundur 58 km / jam
- Maks. hambatan angin 12,7 m / s.
- Berkat efisiensi torsi tinggi dari motor / baling-baling dan otonomi baterai yang tinggi, jangkauannya adalah 22,5 km (pada kecepatan konstan 50 km / jam dalam cuaca tenang).
- 2 × IMU (ICM-40609-D dan ICM42605)
- Magnetometer LIS2MDL
- Modul GPS UBX-M8030
- TI OPT3101 time-of-flight (ToF)
- Barometer LPS22HB
- Kamera vertikal
- 3-axis gyroscope
- Rentang: ± 2000 ° / s
- Resolusi: 16,4 LSB / ° / dtk
- Offset / Akurasi: ± 0,05 ° / dtk (setelah kalibrasi termal dan dinamis)
- Akselerometer 3-sumbu
- Rentang: ± 16g
- Resolusi: 2,048 LSB / mg
- Offset / akurasi: ± 0,5 mg (XY) ± 1 mg (Z) (setelah kalibrasi termal dan dinamis)
- Kontrol suhu s: sistem pemanas terkontrol dalam kaitannya dengan suhu lingkungan, stabil dalam: ± 0,15 ° C
- Frekuensi pengukuran: 2 kHz
- Rentang: ± 49.152G
- Resolusi: 1,5 mG
- Offset / Akurasi: ± 15 mG (setelah kompensasi, pada kecepatan motor maksimum)
- Frekuensi pengukuran: 100 Hz
- Rentang: 260 hingga 1260 hPa
- Resolusi: 0,0002 hPa
- Offset / akurasi: ± 0,1 hPa
- Kontrol suhu: sistem pemanas terkontrol dalam kaitannya dengan suhu sekitar, stabil dalam: ± 0,2 ° C
- Frekuensi pengukuran: 75 Hz
- Kebisingan pengukuran: 20 cm RMS
- Antena patch keramik 25 × 25 × 4mm, memungkinkan peningkatan gain 2 dB dibandingkan ANAFI 1
- Sensitivitas: cold start -148 dBm / pelacakan dan navigasi: -167 dBm
- Time-To-First-Fix: 40 detik
- ) Akurasi / Akurasi: Posisi (standar deviasi 1,4 m), Kecepatan (standar deviasi 0,5 m / s)
- Sensor gambar format: 1/6 inci
- Resolusi: 640 × 480 piksel
- Sensor gambar dengan rana global
- Hitam & putih
- FOV: Sudut pandang horizontal: 53,7 ° / sudut pandang vertikal: 41,5 °
- Panjang fokus: 2,8 mm
- Mengukur kecepatan aliran optik di tanah pada 60 Hz
- 15Hz & presisi pas @ 5Hz
- Rentang: 0-15m
- Resolusi: 0,3 mm
- ) Akurasi b: ± 2 cm (setelah kalibrasi)
- Frekuensi pengukuran: 64 Hz
- 3-axis gyroscope
- Range: ± 2000 ° / s
- Resolusi: 16,4 LSB / ° / s
- Offset / akurasi: ± 0,1 ° / s (setelah dinamis Kalibrasi)
- Akselerometer 3-Sumbu
- Rentang: ± 16g
- Resolusi: 2,048 LSB / mg
- Offset / Akurasi: ± 2,0 mg (XY) ± 5,0 mg (Z) - setelah kalibrasi dinamis
- Frekuensi pengukuran: 1 kHz
- Sinkronisasi perangkat keras dengan kamera vertikal, akurasi: 1 s
- Aliran optik untuk estimasi kecepatan
- Deteksi titik kunci dan pencocokan untuk estimasi posisi
- Sistem penginderaan putar dengan bidang pandang lebar
- Ekstraksi kedalaman ruang sekitarnya berdasarkan keselarasan stereo dan kedalaman dengan gerakan
- Representasi lingkungan dalam bentuk grid pengisian
- Deteksi otonom dan penghindaran rintangan di kecepatan hingga 29 km / jam
PdrAW
Pemutar Media Tingkat Lanjut
PDRAW adalah penampil video tingkat lanjut untuk media ANAFI Ai. Penampil mendukung video streaming (RTP / RTSP) dan rekaman (MP4) di platform Linux, macOS, Android, dan iOS. PDRAW hadir sebagai perpustakaan (libpdraw), perpustakaan pembungkus (libpdraw-backend), dan executable mandiri (pdraw).
PDRAW juga mengelola metadata video. Pada ANAFI Ai, baik streaming maupun video yang direkam menyertakan metadata yang tersedia untuk umum dan didokumentasikan, memungkinkan pemrosesan video udara tingkat lanjut.
Model C. A. D.
Parrot menyediakan model 3D drone mereka untuk diintegrasikan ke dalam desain CAD Anda untuk pembuatan prototipe cepat dan integrasi aksesori.
Kompatibilitas MAVLink dan GUTMA
ANAFI Ai kompatibel dengan protokol open source MAVLink v1 standar, yang memungkinkan pertukaran data waktu nyata antara UAV dan stasiun kontrol. ANAFI Ai dapat dikontrol secara manual atau menggunakan perencanaan penerbangan otomatis dari stasiun pangkalan yang kompatibel dengan MAVLink seperti QGroundControl.
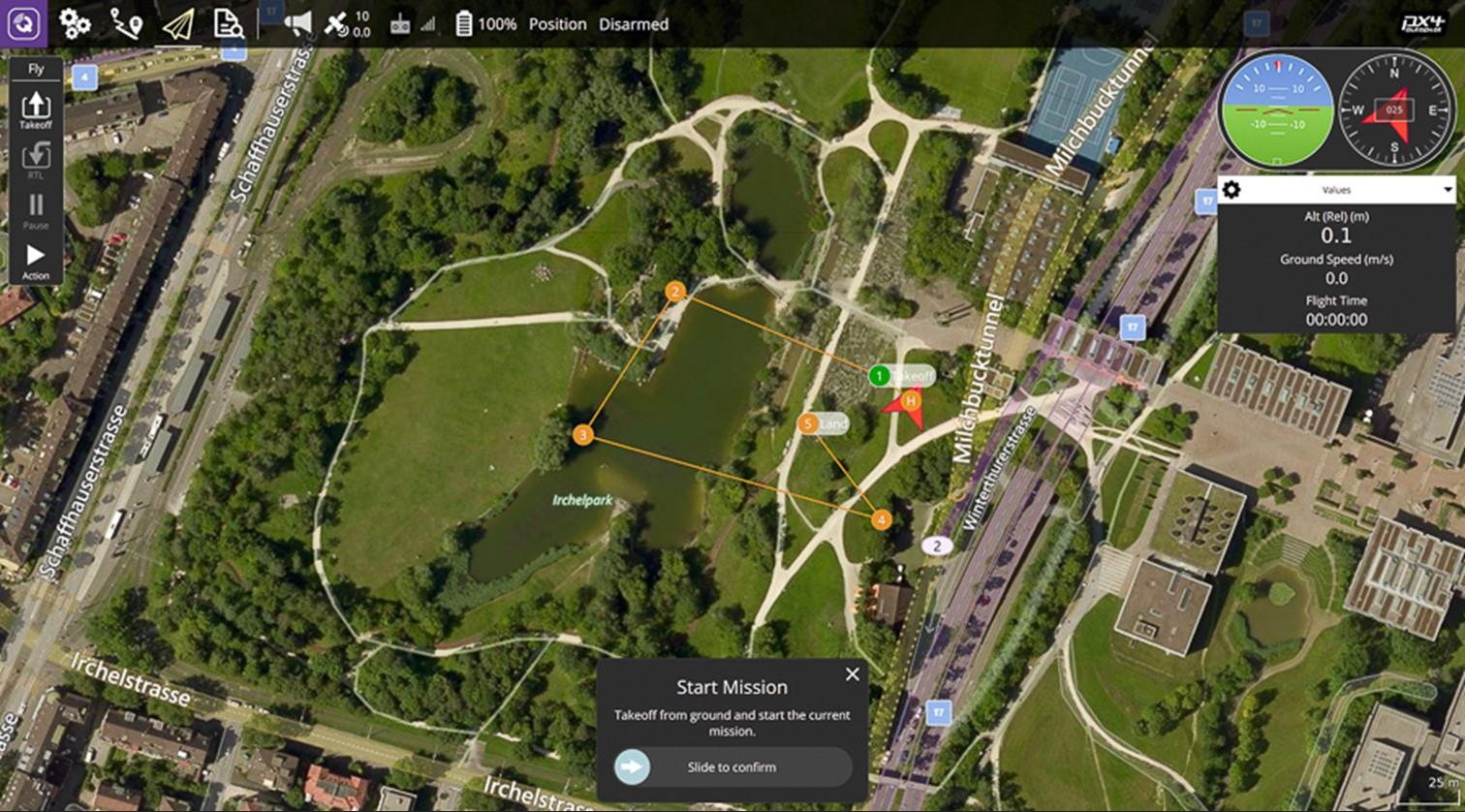
* Antarmuka QGroundControl
ANAFI Ai kompatibel dengan protokol data penerbangan standar open source GUTMA. Asosiasi UTM Global adalah konsorsium pemain utama di bidang kontrol lalu lintas udara.

Ekosistem mitra terbesar untuk drone Parrot
Parrot terus memperluas ekosistem global penyedia perangkat lunak untuk drone melalui program SDK mitranya menawarkan solusi khusus dan unik untuk kebutuhan pengguna profesional yang terus berkembang dan berkembang.
Parrot untuk setiap kebutuhan bisnis
Untuk mendapatkan hasil maksimal dari proses inspeksi, Parrot menawarkan kepada pelanggannya ekosistem perangkat lunak drone yang kompatibel mulai dari manajemen armada, kompilasi penerbangan merencanakan dan mengimpor log penerbangan, sebelum memotret, memetakan, memantau, dan menganalisis data yang diterima.
PIX4D × Parrot
Aplikasi pemodelan 2D / 3D. Satu set unik aplikasi fotogrametri seluler, desktop, dan cloud.
Verizon x Skyward x Parrot
Solusi drone 4G LTE di Amerika Serikat. Drone robotik ANAFI Ai pertama dari jenisnya terhubung ke jaringan Verizon 4G LTE dengan perangkat lunak Skyward yang telah diinstal sebelumnya. Membuka pintu untuk transfer data yang hampir real-time, penerapan jarak jauh, dan penerbangan yang tidak terlihat.

Skyward × Parrot
Integrasi dan pembelajaran dalam kapasitas ANAFI. Platform manajemen penerbangan termasuk wilayah udara, akses LAANC, dan pelatihan, peralatan, dan konektivitas untuk penyebaran armada drone perusahaan.

DroneSense × Parrot
Bangun, kelola, dan skalakan program drone Anda. Profesional kendaraan udara tak berawak di sektor keselamatan publik dapat menggunakan rangkaian lengkap kemampuan DroneSense, yang dirancang khusus untuk kebutuhan responden pertama.

Mitra Ekosistem Parrot

Program Afiliasi Parrot
Pengembang mengusulkan untuk memperluas kemampuan programnya untuk drone dengan mengintegrasikan SDK mereka.
Keamanan siber
Kerahasiaan data
Pengembang mencatat bahwa dia tidak mengumpulkan data apa pun tanpa persetujuan pengguna. Keputusan apakah akan mentransfer data ke infrastruktur Parrot atau tidak sepenuhnya berada di tangan pengguna itu sendiri. Data yang dihosting di Parrot memungkinkan pengguna untuk menyinkronkan data penerbangan dan rencana penerbangan antara perangkat yang berbeda, serta memfasilitasi dukungan dan memungkinkan Parrot untuk meningkatkan produknya.
ANAFI Ai mematuhi Peraturan Perlindungan Data Umum Uni Eropa (GDPR) dan melangkah lebih jauh, misalnya, memungkinkan Anda untuk menghapus semua data dalam 1 klik, sehingga memberikan kontrol yang paling mudah kepada pengguna. Masalah satu klik ini diselesaikan di aplikasi seluler FreeFlight7 atau dalam pengaturan privasi akun Parrot. Cloud. Dengan demikian, pengguna kapan saja tidak hanya dapat berhenti bertukar data, tetapi juga dengan mudah meminta penghapusannya.
Jika pengguna menyetujui pertukaran data, pemrosesan mereka akan dilakukan dalam format yang sepenuhnya transparan, dijelaskan secara rinci dalam Kebijakan Privasi Parrot.
Ketika ANAFI Ai terhubung ke Skycontroller 4 melalui 4G, infrastruktur Parrot digunakan untuk memasangkan drone dan remote kontrol. Jika pengguna tidak masuk ke akun Parrot. Cloud, dia masih dapat menggunakan koneksi 4G dengan akun sementara yang unik. Saat menggunakan infrastruktur Parrot untuk pemasangan 4G, video dienkripsi menggunakan kunci yang disepakati antara drone dan pengontrol jarak jauh, Parrot tidak memiliki akses ke video yang tidak dienkripsi.

Sesuai dengan FIPS140-2 dan Elemen Aman CC EAL5
ANAFI Ai memiliki elemen keamanan Wisekey bawaan yang sesuai dengan NIST FIPS140-2 Level 3 dan Common Criteria EAL5 bersertifikat. Elemen keamanan serupa juga dibangun ke dalam perangkat keras kontrol Skycontroller 4.
Fungsi elemen keamanan:
Menggunakan kunci pribadi ECDSA dengan parameter domain P521, unik untuk setiap drone. Itu tidak dapat diekstraksi dari elemen keamanan. Dan sertifikat yang terkait dengan kunci ini ditandatangani oleh otoritas sertifikasi.
Wisekey melindungi integritas firmware, memberikan identifikasi unik drone untuk pemasangan 4G dan otentikasi yang kuat, dan tanda tangan digital unik dari foto yang diambil oleh drone.

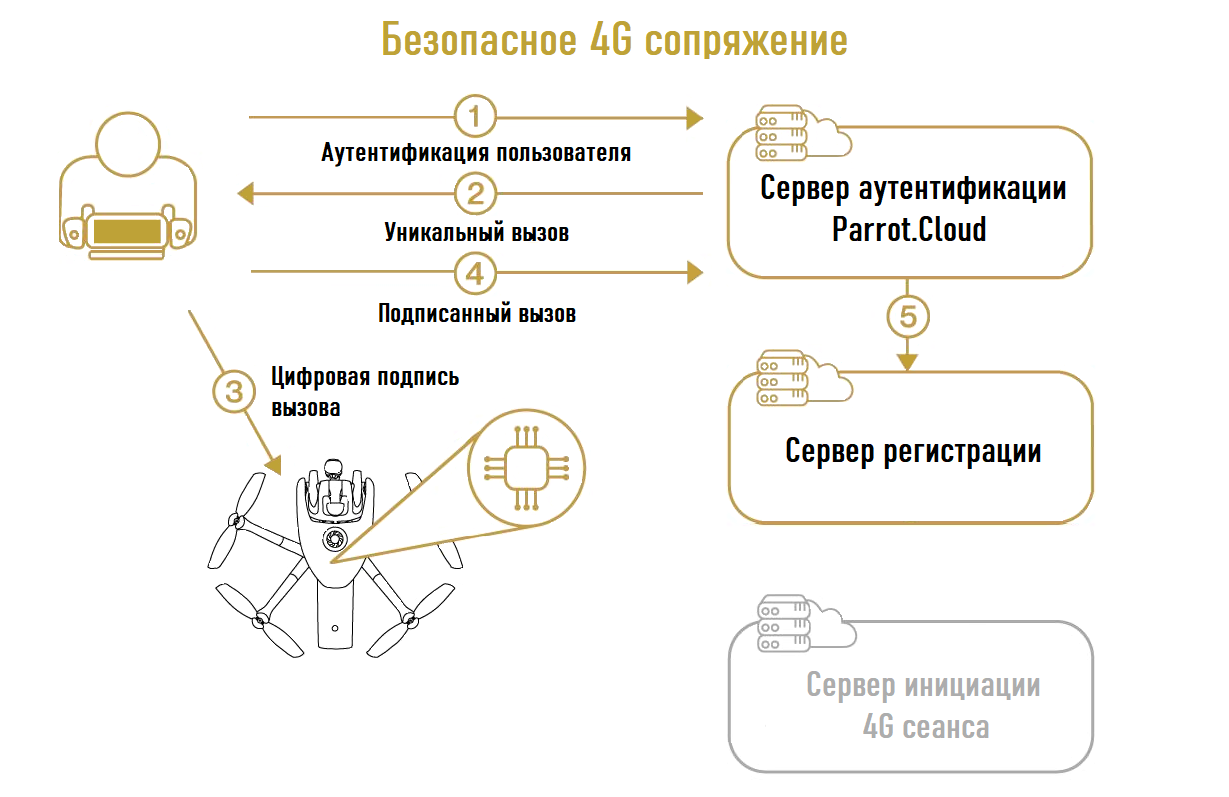
Koneksi aman 4G dan otentikasi kuat
proses pemasangan perangkat dengan aman. Selama proses ini, pengguna dengan andal mengonfirmasi bahwa ia terhubung ke drone tertentu. Berkat ANAFI Ai Secure Element, dia bisa melakukan ini tanpa memasukkan kata sandi di dalam drone.
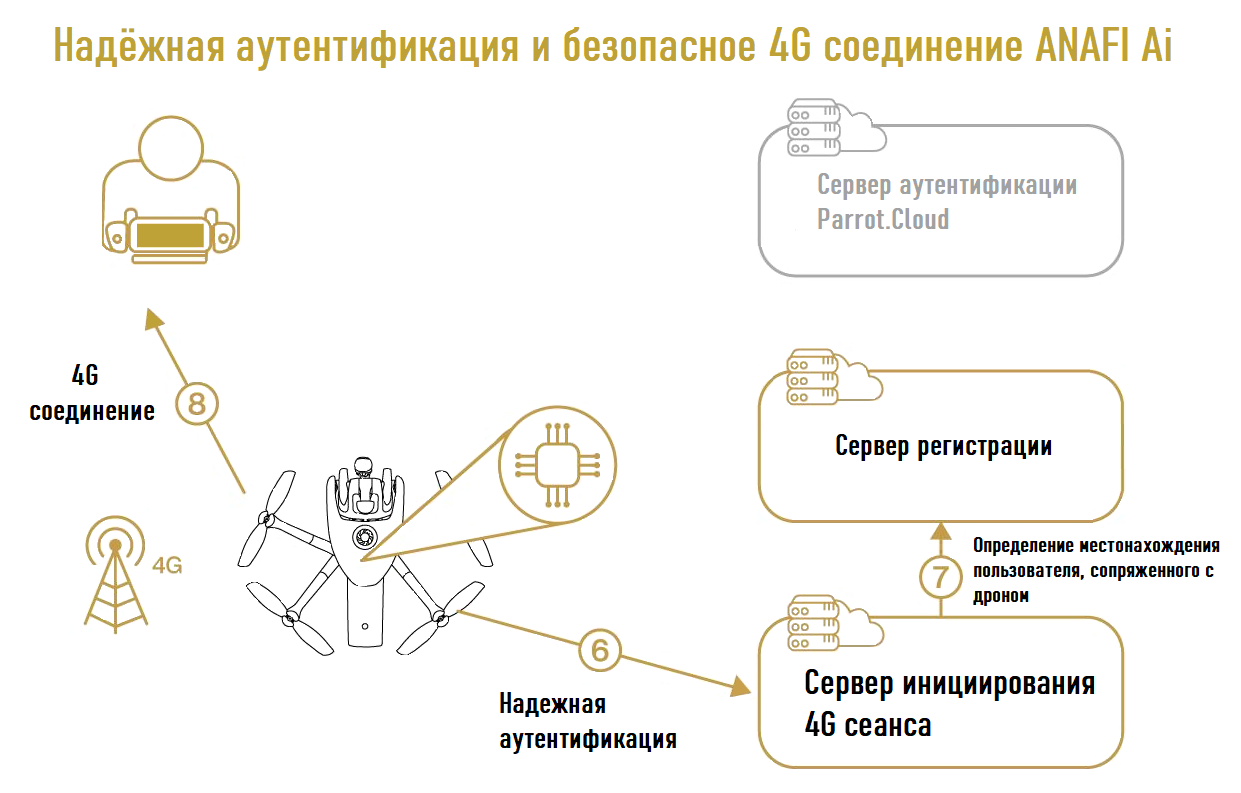
Server Parrot kemudian mendaftarkan komunikasi antara pengguna dan drone. Ketika koneksi Wi-Fi antara pengguna dan drone terputus, ANAFI Ai akan secara otomatis beralih ke koneksi 4G. ANAFI Ai melakukan otentikasi yang kuat pada server Parrot menggunakan kunci pribadinya yang disimpan di Elemen Aman. Server Parrot mencari pengguna yang terhubung dan menyediakan antarmuka antara ANAFI Ai dan Skycontroller 4.
Untuk melindungi kontrol drone dan aliran video yang datang ke Skycontroller 4, ANAFI Ai mendukung protokol TLS, DTLS, dan SRTP.
Inisialisasi dan pembaruan yang aman
Urutan boot pesawat dilindungi: sistem memeriksa bahwa ia menggunakan perangkat lunak Parrot dan perangkat lunak ini tidak dirusak. Pemeriksaan keamanan dilakukan pada setiap inisialisasi. Layanan pembaruan juga mengontrol tanda tangan digital dari pembaruan perangkat lunak.
Menyiapkan kunci pengguna pada Elemen Aman
Pengguna ANAFI Ai memiliki akses ke Elemen Aman akun operator khusus. Akun ini digunakan untuk menyiapkan kunci yang relevan dengan pengguna ini. Pengguna dapat mengonfigurasi Elemen Aman dengan kunci publik dari penyedia misi yang mereka percayai. ANAFI Ai hanya akan melakukan misi yang ditandatangani dengan kunci ini. Proses ini mencegah penyerang melakukan misi penerbangan berbahaya di drone.
Foto yang Ditandatangani Secara Digital
Elemen Aman dari ANAFI Ai dapat menandatangani gambar drone secara digital. Tanda tangan ini adalah bukti bahwa:

Dengan kata lain, tanda tangan digital melindungi semua data yang terkait dengan gambar, termasuk tempat dan waktu pengambilan, dan drone ANAFI Ai mana.
Pengguna serta mitra yang menawarkan solusi perangkat lunak menggunakan fotografi drone dapat memverifikasi tanda tangan digital foto ANAFI Ai baik dengan sertifikat drone atau melalui katalog kunci publik yang disediakan oleh Parrot.
Transparansi dan pemeriksaan keamanan berkelanjutan dengan Bug bounty
Parrot menggunakan protokol standar dan format file bila memungkinkan. Tidak ada kode yang dikaburkan atau fitur tersembunyi. Ini memungkinkan pengguna untuk memahami cara kerja produk Parrot dan menguji keamanannya. Selain itu, OpenFlight, perangkat lunak yang digunakan untuk mengontrol drone, bersifat open source, memberikan kontrol penuh kepada pengguna.
Pada bulan April 2021, Parrot meluncurkan Program Bug Bounty dengan YesWeHack, platform keamanan crowdsourced pertama di Eropa. Melalui kemitraan ini, Parrot memanfaatkan komunitas riset keamanan siber YesWeHack yang luas untuk mengidentifikasi potensi kerentanan dalam drone, aplikasi seluler, dan layanan webnya.
Program Bug Bounty terdiri dari dua fase:
Program Swasta awalnya menyediakan akses eksklusif untuk peneliti keamanan tertentu dan termasuk model drone Parrot masa depan. Pengalaman dan beragam keterampilan para peneliti akan memastikan tingkat keamanan produk yang tinggi sebelum dipasarkan, yang akan membantu meningkatkan keamanan pengguna Parrot dan perlindungan data mereka.
Setelah putaran pertama program Bug Bounty pribadi ini dan setelah komersialisasi, produk masuk ke program publik. Keamanan mereka kemudian diperiksa secara ketat oleh seluruh komunitas YesWeHack yang terdiri dari lebih dari 22.000 peneliti keamanan siber.

Manajemen Data
Parrot Cloud memungkinkan pengguna yang memilih untuk berbagi data mereka untuk mengelola data penerbangan dan armada, serta multimedia data yang diterima oleh drone mereka.
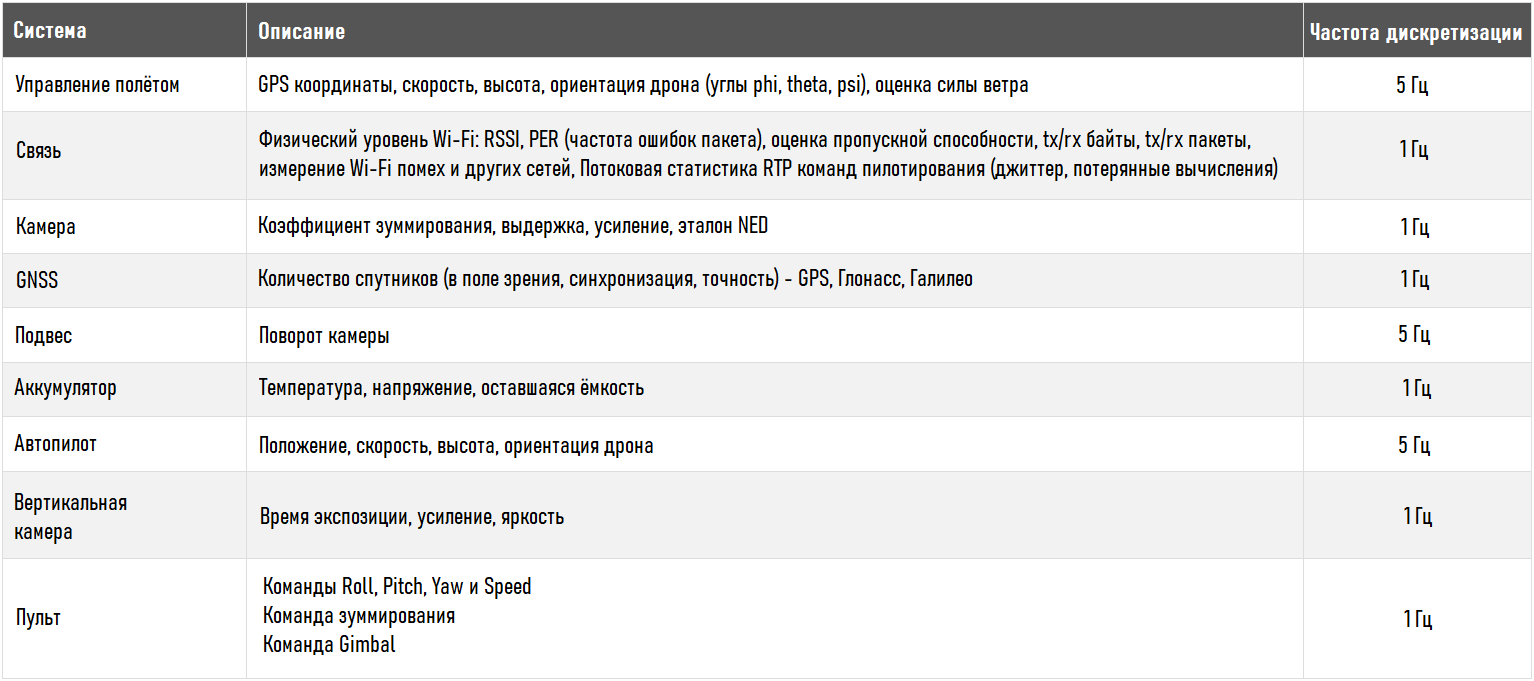
Data yang dikumpulkan
Parrot Cloud mengumpulkan 4 jenis data:
Statis (data produk):
Peristiwa
"Gambar kontekstual"
Telemetri
Penggunaan akhir dari data yang dikumpulkan
Burung beo hanya mengumpulkan dan menggunakan data dari pelanggan yang telah setuju untuk membagikannya untuk meningkatkan kualitas dari produknya...
Manajemen Pemeliharaan
Pemeliharaan Pencegahan: Alat kami mengumpulkan semua informasi yang terkait dengan misi (jenis misi, waktu lepas landas dan mendarat, jumlah misi, lokasi drone, kecepatan penerbangan, rencana penerbangan dan pengaturan AirSDK). Ini memungkinkan Anda untuk menerima informasi yang akurat tentang status armada drone ANAFI Ai (serta pengontrol dan baterainya) secara real time.
Pemeliharaan Korektif: Informasi yang dikumpulkan berguna untuk menentukan status drone atau baterai tertentu dengan cepat.
Meningkatkan Kecerdasan Buatan (AI)
Elemen AI dari ANAFI Ai (PeleeNet, jaringan konvolusi, dll.) menawarkan layanan dan fitur tak tertandingi kepada pengguna: penghindaran rintangan, pelacakan target, beberapa mode penerbangan. Kualitas AI bergantung pada kuantitas dan kualitas data yang dikumpulkan (gambar dan video): data ini memberikan pembelajaran mesin. Dalam hal ini, kualitas data bukan satu-satunya elemen yang menentukan: metadata yang terkait dengan data ini juga fundamental. Untuk alasan ini, alat kami mengumpulkan gambar dan metadata secara teratur dan bergantung pada peristiwa, dengan total 30 hingga 50 MB per menit.
Karakteristik penerbangan
Karakteristik aerodinamis
Penggerak dan aerodinamika
 CFD Gambar Baling-baling ANAFI Ai
CFD Gambar Baling-baling ANAFI Ai
Bilah baling-baling biomimikri baru dengan paus ujung bungkuk seperti ujung tombak. Pendekatan ini memungkinkan untuk meningkatkan efisiensi pendorong pembangkit listrik, yang pada output memberikan peningkatan daya dorong pada kecepatan rotasi yang sama. Efek ini sebanding dengan peningkatan diameter rotor.
Kebisingan akustik, terutama derau nada, yang berasal dari ujung depan juga berkurang. Oleh karena itu ANAFI Ai lebih tenang [71,5 dB SPL (A) pada 1 m] daripada Skydio 2 [76,4 dB SPL (A) pada 1 m].
 Gambar CFD dari sinar ANAFI Ai
Gambar CFD dari sinar ANAFI Ai
Sensor
Untuk memastikan penerbangan yang aman ANAFI Ai dilengkapi dengan:
Karakteristik sensor
IMU Penerbangan: ICM-40609-D
Magnetometer: LIS2MDL
Barometer: LPS22HB 1
GNSS: UBX-M8030 1
Kamera vertikal
ToF: TI OPT3101
Kamera vertikal IMU: ICM-42605
Autopilot
ANAFI Ai Flight Controller menyediakan piloting yang sederhana dan intuitif: tidak diperlukan pelatihan untuk mengoperasikannya. Ini memungkinkan Anda untuk mengotomatiskan banyak mode penerbangan (Flight Plan, Cameraman, Hand take-off, Smart RTH). Algoritme fusi sensor menggabungkan data dari semua sensor untuk memperkirakan rasio ANAFI Ai, ketinggian, posisi, dan kecepatan.
Penilaian kondisi sangat penting untuk berfungsinya drone. Quadcopters secara inheren tidak stabil ketika pengontrol penerbangan digunakan dengan loop terbuka; untuk mengontrolnya dengan mudah, belum lagi kontrol otonom, perlu menstabilkannya menggunakan algoritma kontrol loop tertutup. Algoritma ini menghitung dan mengirimkan perintah ke motor yang dibutuhkan oleh ANAFI Ai untuk mencapai lintasan yang diinginkan.

Penerbangan dalam ruangan
Dengan tidak adanya sinyal GPS, ANAFI Ai terutama mengandalkan pengukuran kamera vertikal untuk memperkirakan kecepatan dan posisi. Performa kamera vertikal ditentukan oleh dua algoritme utama:
Kamera vertikal algoritma dapat bekerja dalam kondisi cahaya rendah berkat ANAFI Ai yang dilengkapi dengan sepasang lampu LED yang terletak di sebelah kamera vertikal. Mereka memungkinkan drone untuk tetap stabil, terutama saat terbang di dalam ruangan atau tanpa adanya GPS, pada ketinggian kurang dari 5m di atas tanah. Kekuatan lampu LED menyesuaikan secara otomatis, tergantung pada kebutuhan algoritma.
Penerbangan otonom
Fitur utama
Bab ini merinci sensor, perangkat keras, dan algoritma yang digunakan oleh ANAFI Ai untuk memungkinkan penerbangan otonom. Ini diatur sebagai berikut:
- Penjelasan rinci tentang sistem persepsi ANAFI Ai
- Algoritma persepsi yang digunakan untuk merekonstruksi lingkungan 3D di sekitar drone
- Penjadwalan ulang dan rintangan penghindaran

Strategi sistem persepsi
Persepsi lingkungan tiga dimensi adalah kemampuan kunci untuk mencapai penerbangan otonom, terutama di ruang terbatas. Ini adalah prasyarat untuk deteksi dan penghindaran rintangan yang terjamin, yang mengurangi beban operator drone, meningkatkan keberhasilan misi, dan memastikan keselamatan pesawat.
Melepaskan potensi penuh dari kamera terbang, yang dapat dengan bebas bergerak dan berputar ke segala arah tanpa batasan, memerlukan solusi penginderaan yang efektif. Secara khusus, sistem penginderaan harus dapat menerima informasi tentang lingkungan dalam arah yang sesuai dengan gerakan maju dalam penerbangan - terlepas dari orientasi kamera.
ANAFI Ai mengandalkan solusi teknis unik berdasarkan dua gimbal mekanis untuk memisahkan orientasi kamera utama dan sistem penginderaan:
- Kamera utama dipasang pada 3- axis gimbal, menjadikannya orientasi 3D yang tidak bergantung pada orientasi drone.
- Sistem penginderaan dipasang pada gimbal sumbu tunggal - terhubung ke gerakan yaw drone, dapat diorientasikan ke segala arah.
 ANAFI Ai penstabil ganda untuk persepsi dan visualisasi.
ANAFI Ai penstabil ganda untuk persepsi dan visualisasi.
Sumbu kemiringan dari dua gantungan sejajar dan digabungkan untuk mencapai desain ultra-kompak.
Berkat solusi ini, kamera utama dan sistem penginderaan dapat diarahkan ke dua arah yang berbeda. Desain ini menghindari penggunaan kamera mahal di bagian samping, atas, bawah, dan belakang drone sambil tetap menyediakan bidang pandang yang luas untuk sistem penginderaan.
Bagian ini diatur sebagai berikut:
- Rincian sensor yang digunakan untuk sistem penginderaan
- Spesifikasi untuk gimbal kamera utama dan gimbal sistem penginderaan
- Strategi untuk menargetkan sistem penginderaan untuk memanfaatkan potensi struktur suspensi ganda
Sensor
Sistem penginderaan didasarkan pada pasangan kamera identik dengan satu sumbu pitch...
 Engsel mekanis 1-sumbu untuk sistem penginderaan ANAFI Ai.
Engsel mekanis 1-sumbu untuk sistem penginderaan ANAFI Ai.
Spesifikasi sensor adalah sebagai berikut:
- Model: Onsemi AR0144CSSM28SUD20
- Warna: Monokrom
- Resolusi: 1280 × 800 piksel
- Kecepatan bingkai: 30 fps
- Rana global
- Bidang pandang horizontal penuh: 118 ° (110 ° dapat digunakan untuk penginderaan)
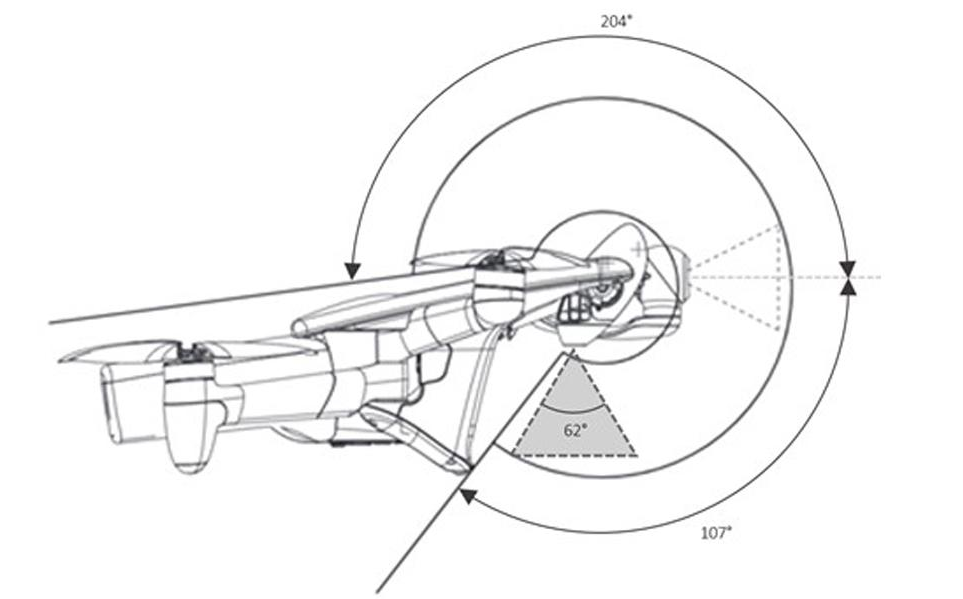
- Bidang pandang vertikal penuh: 72 ° (62 ° dapat digunakan untuk penginderaan)
- Panjang fokus: 1,47 mm (0,039 inci - 492.94610 piksel)
- Bukaan: f / 2.7
Spesifikasi stereopairs adalah sebagai berikut:
- Common Pitch Axis
- Garis Dasar / Jarak: 62 mm (2,44 inci)
- Tangkapan sinkron pada 30 fps

Dual Gimbal
Gimbal mekanis kamera utama adalah pitch-rol mekanis 3-sumbu l-yaw "dengan karakteristik sebagai berikut:
- Pembatas Pitch: -116 ° / 176 °
- Pembatas Roll: / - 36 °
- Pembatas Yaw: / - 48 °
Suspensi mekanis dari sistem penginderaan adalah suspensi sumbu tunggal dengan karakteristik sebagai berikut:
- Penghentian akhir di pitch: -107 ° / 204 °
- Waktu tempuh dari satu pemberhentian ke pemberhentian lainnya: 300 ms
Sistem penginderaan memiliki perjalanan 311 ° (di mana 296 ° tidak ditutupi oleh tubuh drone), yang memungkinkan untuk mundur persepsi.
Bidang pandang vertikal seketika dan sistem pembatas persepsi ANAFI Ai.
Sistem ini dirancang sedemikian rupa sehingga:
- Baling-baling baling-baling tidak memasuki bidang pandang kamera utama
- Utama kamera tidak menutupi bidang pandang dari sistem persepsi
- Kamera utama dan sistem penginderaan dapat sepenuhnya dilipat ke belakang untuk melindungi lensa
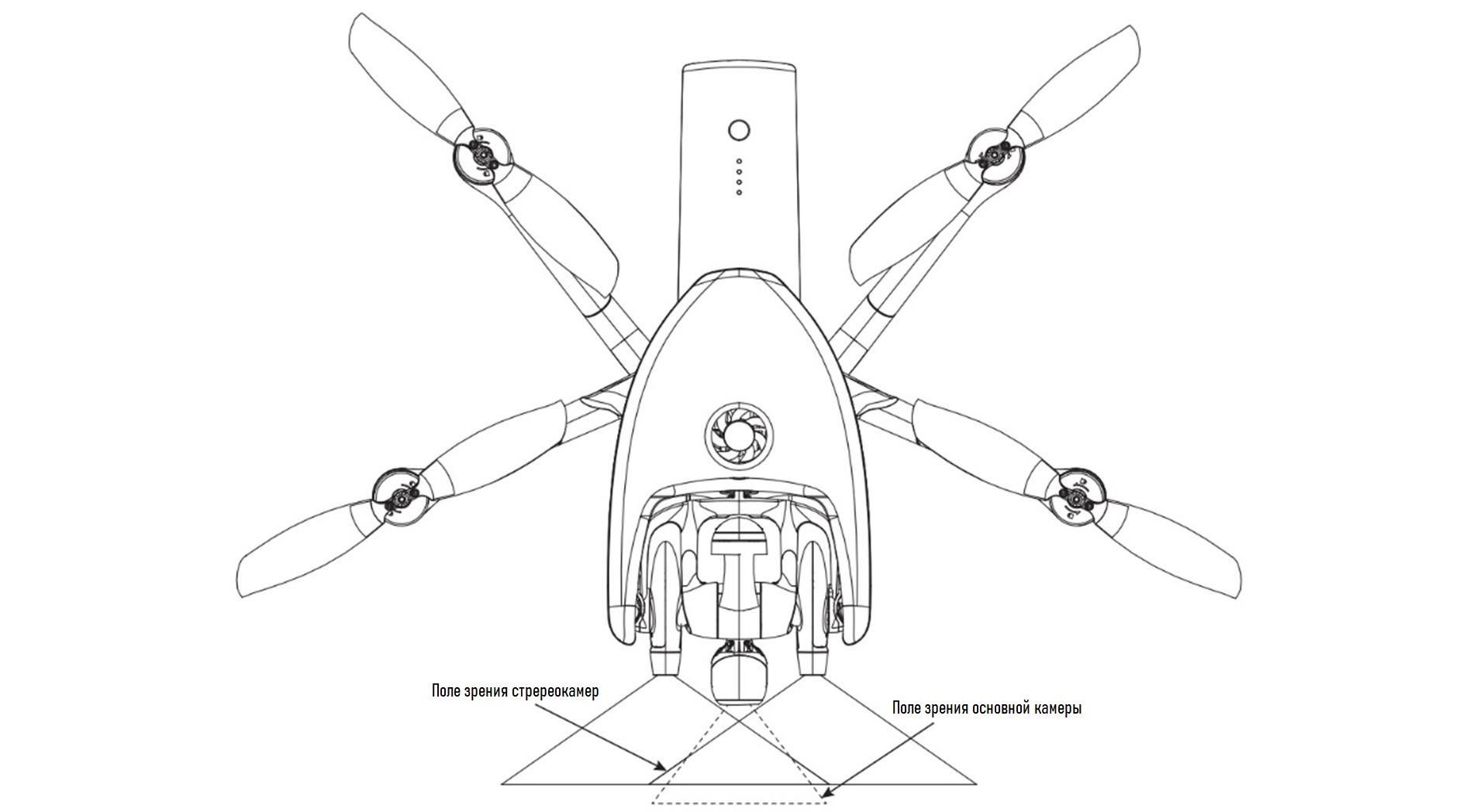 Bidang pandang horizontal dari sistem persepsi ANAFI Ai.
Bidang pandang horizontal dari sistem persepsi ANAFI Ai.
Saat bersandar, sistem persepsi bergerak ke posisi paling atas, sehingga memberikan pandangan yang jelas.
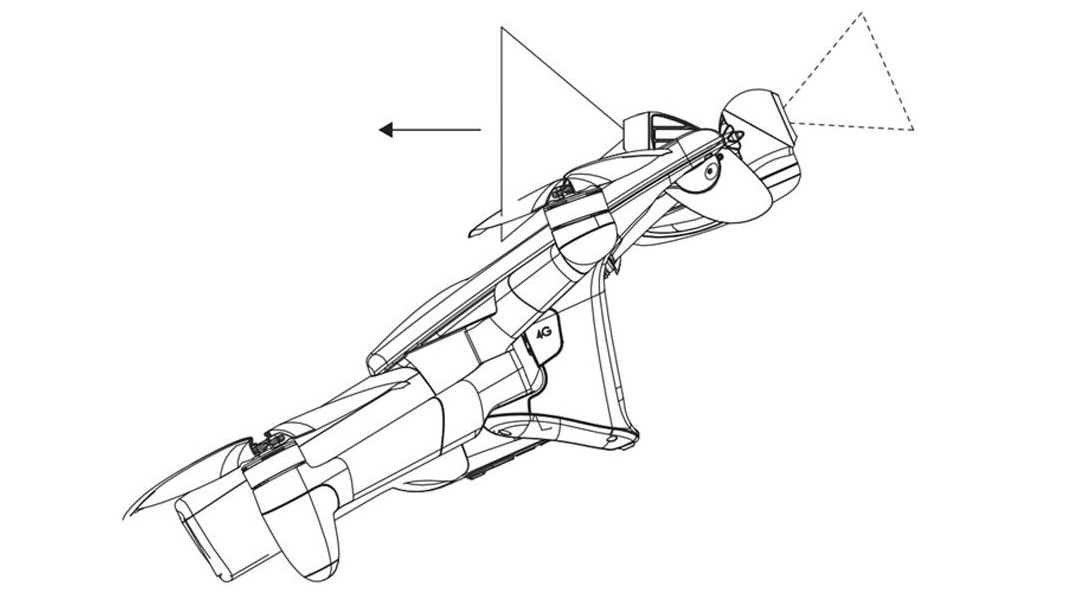
Persepsi ANAFI Ai dalam posisi bersandar penuh untuk penerbangan mundur.
Rekonstruksi lingkungan
Rekonstruksi lingkungan tiga dimensi di sekitarnya untuk penerbangan otonom dilakukan dalam dua tahap:
- Mengekstrak informasi kedalaman dari persepsi dalam bentuk peta kedalaman
- Menggabungkan data peta kedalaman ke dalam grid pengisian tiga dimensi
Dua metode digunakan untuk mendapatkan peta kedalaman dari sensor persepsi:
- Kedalaman berdasarkan penyelarasan stereo
- Kedalaman dari gerakan
Kedalaman dari korespondensi stereo
Metode utama untuk mengekstraksi kedalaman informasi didasarkan pada paralaks antara dua kamera stereo dari sistem penginderaan. Dengan memotret lingkungan dalam satu arah, tetapi dari dua posisi yang berbeda, objek di bidang pandang sistem persepsi muncul dalam posisi yang berbeda dalam gambar yang diperoleh oleh dua kamera. Semakin dekat subjek, semakin besar perbedaan posisi.
Dengan demikian, strateginya adalah menentukan titik-titik dalam gambar yang diperoleh oleh kamera stereo kiri dan kanan yang sesuai dengan objek yang sama di bidang pandang sistem penginderaan, dan mengukur perbedaan posisi ini titik pada kedua gambar. Perbedaan ini disebut disparitas dan diukur dalam jumlah piksel.
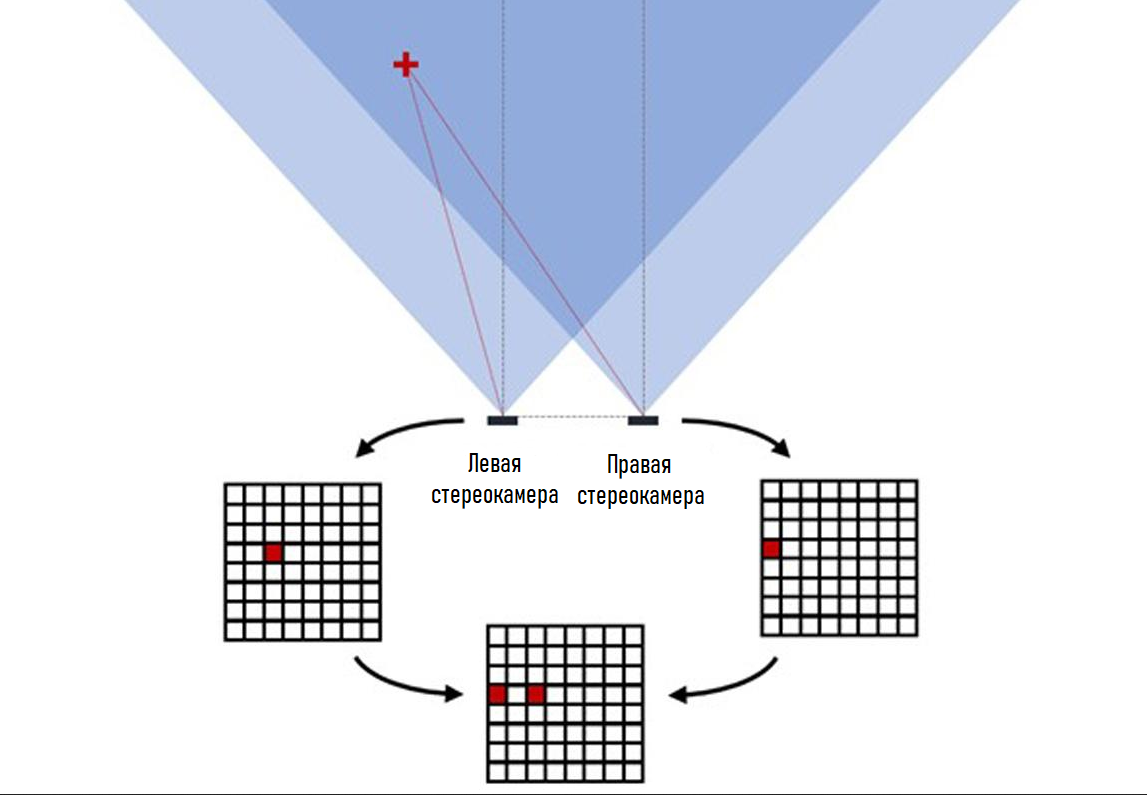 Ilustrasi prinsip penglihatan stereo - titik 3D merah berada di posisi berbeda di kiri dan kanan gambar.
Ilustrasi prinsip penglihatan stereo - titik 3D merah berada di posisi berbeda di kiri dan kanan gambar.
Disparitas kemudian dapat dikaitkan dengan kedalaman masing-masing titik ini menggunakan hubungan berikut depth = focal * baseline / disparity, di mana kedalaman dan baseline dinyatakan dalam unit yang sama, dan fokus panjang dan disparitas dinyatakan dalam jumlah piksel.
Hasil perhitungan berupa peta kedalaman 176 × 90 piksel, yang nilai setiap pikselnya sesuai dengan kedalaman dalam meter. Peta kedalaman diperbarui pada 30 Hz.
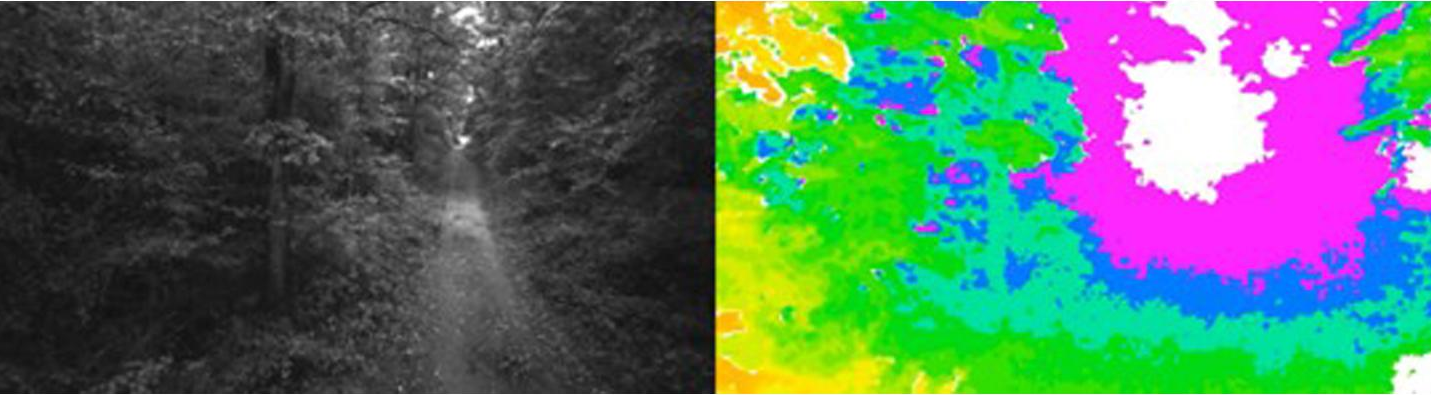
Contoh gambar yang diambil dengan kamera kanan sistem penginderaan ANAFI Ai (kiri) dan kedalaman yang sesuai diperoleh menggunakan pencitraan stereo (kanan). Peta warna berubah dari merah (Lebih dekat) ke ungu (Lebih Jauh) - putih berarti Di Luar Jangkauan.
Hasil langsung dari ini adalah kedalaman yang diukur dengan metode ini didiskritisasi, karena disparitas hanya dapat mengambil nilai diskrit (jumlah piksel). Titik 3D yang terletak cukup jauh dari sistem persepsi dan menciptakan disparitas teoretis kurang dari satu piksel akan dianggap tak terhingga, karena disparitas diskrit aktual yang sesuai akan sama dengan 0. Keakuratan metode perbandingan stereo menurun dengan bertambahnya jarak, meskipun ada adalah metode yang dapat mengurangi fenomena ini dengan mencapai pengambilan sampel subpiksel.
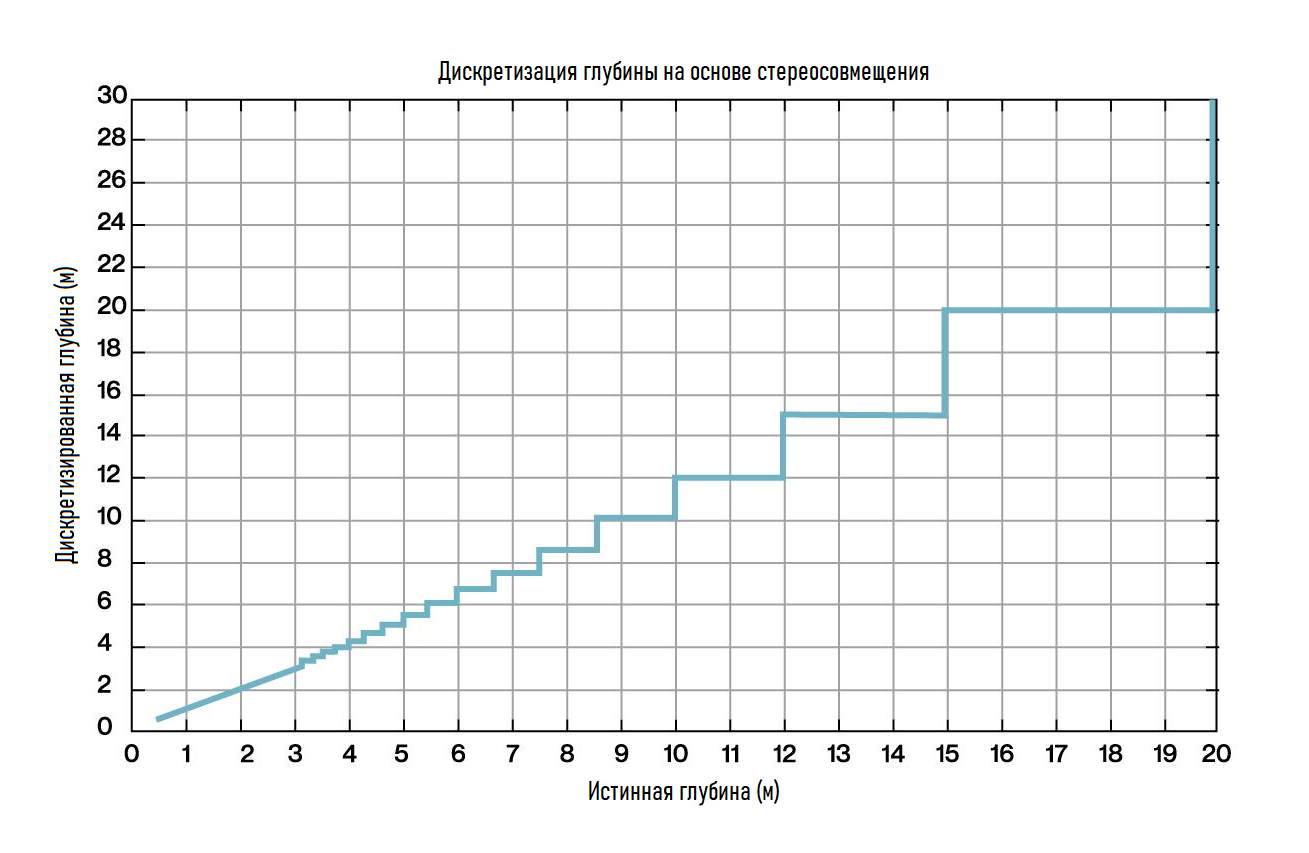 Kedalaman diskrit diukur dengan "kesejajaran stereo" versus "kedalaman sebenarnya".
Kedalaman diskrit diukur dengan "kesejajaran stereo" versus "kedalaman sebenarnya".
Selain itu, perbedaan divergen saat kedalaman mendekati nol. Karena jumlah piksel dalam gambar terbatas, nilai disparitas juga terbatas. Akibatnya, ada kedalaman minimum di mana sistem persepsi buta. Kedalaman minimum ini adalah 36 cm untuk ANAFI Ai.
Tentang Kalibrasi: Setiap pasangan kamera stereo dikalibrasi dari pabrik untuk secara akurat mengukur perbedaan kecil yang mungkin ada di antara kedua kamera dan mengimbanginya dalam perhitungan kedalaman onboard.
Pengguna juga dapat mengkalibrasi ulang sepasang kamera stereo menggunakan pola uji yang disertakan dengan drone. Secara khusus, sampai batas tertentu, drone mampu mendeteksi potensi kesalahan kalibrasi yang mungkin timbul selama masa pakainya. Dalam hal ini, perangkat lunak pesawat akan mencoba menyesuaikan dan mengkompensasinya, dan jika gagal, pemberitahuan akan muncul meminta Anda untuk mengkalibrasi ulang.
Kedalaman dari gerakan
Pergerakan drone juga dapat digunakan untuk mengumpulkan gambar lingkungan dari sudut yang berbeda dan dengan demikian merekonstruksi informasi kedalaman. Teknik ini disebut kedalaman dari gerakan, atau penginderaan bermata, karena satu kamera bergerak cukup untuk mengumpulkan informasi kedalaman.
Prinsip operasi mirip dengan penglihatan stereo, tetapi alih-alih membandingkan gambar lingkungan yang diperoleh oleh pengamat yang berbeda pada saat yang sama, persepsi membandingkan gambar lingkungan yang diperoleh oleh pengamat yang sama pada waktu yang berbeda. Jika drone bergerak, maka gambar dari pengamat unik ini akan ditangkap dari sudut yang berbeda. Mengetahui posisi di mana setiap frame diambil, dimungkinkan untuk melakukan triangulasi titik yang sesuai dengan fitur yang sama dalam gambar yang berbeda dan mengembalikannya ke 3D.
Outputnya adalah titik awan tiga dimensi yang berisi hingga 500 titik untuk ANAFI Ai, yang dihasilkan pada frekuensi 10 Hz.
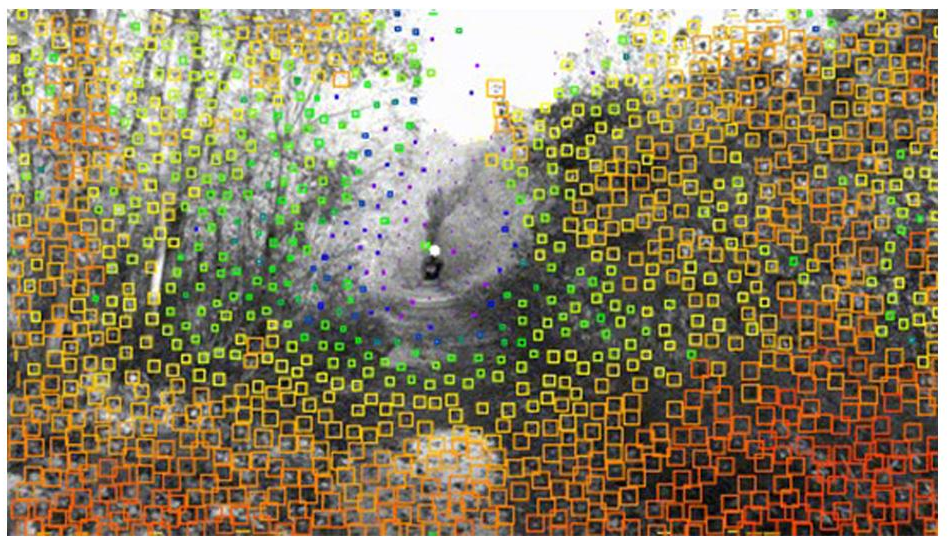 Contoh titik awan yang dibuat berdasarkan kedalaman dari gerakan - peta warna berubah dari merah (Lebih dekat) ke ungu (Lebih Jauh).
Contoh titik awan yang dibuat berdasarkan kedalaman dari gerakan - peta warna berubah dari merah (Lebih dekat) ke ungu (Lebih Jauh).
Algoritma ANAFI Ai Motion Depth biasanya menghasilkan lebih sedikit informasi (sparse point cloud) daripada algoritma pencocokan stereo dan membutuhkan drone untuk bergerak mengumpulkan informasi. Selain itu, algoritme ini tidak dapat mengekstrak informasi ke arah gerakan yang tepat (setidaknya untuk siaran langsung), karena objek dalam gambar tampak hampir tidak bergerak dalam arah ini (fokus ekspansi).
Namun, ia memiliki jangkauan deteksi yang lebih baik (secara teoritis jangkauan tak terbatas) daripada pencocokan stereo.
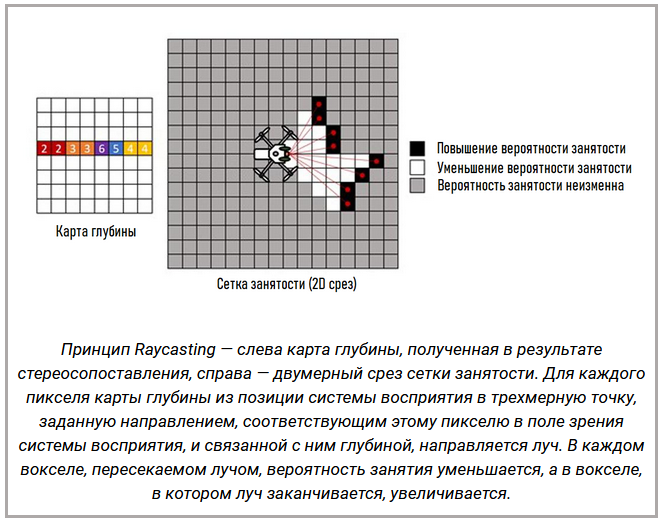
Fill Grid
Kedalaman informasi dari stereo dan algoritma penginderaan bermata diintegrasikan ke dalam Fill Grid. Jaring ini mengambil sampel lingkungan 3D ke dalam kubus 3D yang disebut voxel. Setiap voxel diberi probabilitas untuk ditempati oleh rintangan atau, sebaliknya, bebas dari rintangan.
Algoritme transmisi sinar digunakan untuk mengintegrasikan informasi kedalaman ke dalam kisi pengisi. Untuk setiap piksel peta kedalaman yang diperoleh sebagai hasil perbandingan stereo, itu diubah menjadi titik tiga dimensi, dan untuk setiap titik titik awan - menjadi kedalaman yang diperoleh sebagai hasil gerakan:
- Sebuah sinar digambar dalam kisi-kisi pengisian dari posisi sistem persepsi ke posisi titik 3D.
- Probabilitas voxel yang berisi titik 3D terisi meningkat.
- Probabilitas bahwa semua voxel yang dilintasi oleh sinar selain yang mengandung titik 3D terisi berkurang.
Dengan demikian, grid bertindak sebagai filter waktu untuk informasi kedalaman, menyerap kebisingan potensial dalam pengukuran kedalaman, dan sebagai memori pengukuran sebelumnya, yang memungkinkan Anda untuk menavigasi lingkungan yang sulit bahkan tanpa adanya bidang pandang 360 ° yang berkelanjutan dari sistem persepsi.
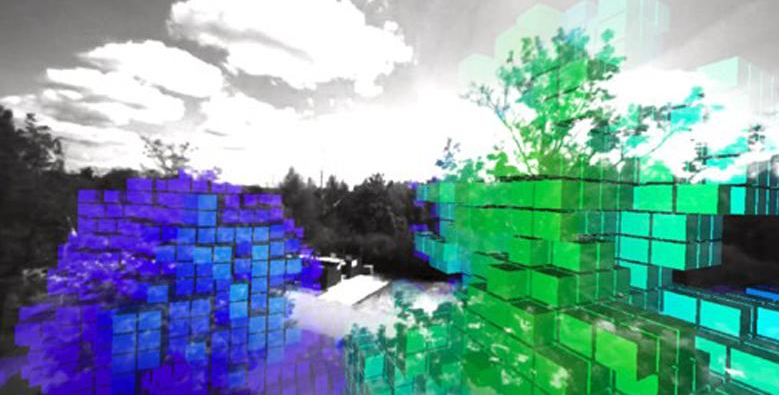 Contoh kisi pengisi. Voxel ditumpangkan pada tampilan kamera stereo kanan dengan tingkat kepastian yang tinggi bahwa mereka sibuk, mulai dari merah (Dekat) hingga ungu (Jauh).
Contoh kisi pengisi. Voxel ditumpangkan pada tampilan kamera stereo kanan dengan tingkat kepastian yang tinggi bahwa mereka sibuk, mulai dari merah (Dekat) hingga ungu (Jauh).
Grid pengisi adalah dasar untuk algoritma perencanaan gerak yang digunakan oleh ANAFI Ai untuk penerbangan otonom dan penghindaran rintangan.
Penghindaran Rintangan
Berkat pengetahuan tentang lingkungan 3D drone yang disimpan di kisi pengisi, ANAFI Ai dapat menghindari rintangan. Ini memberikan keamanan tambahan yang signifikan untuk misi otonom, tetapi juga berguna untuk penerbangan manual, terutama jika garis pandang antara pilot dan drone terganggu.
Setiap 30 ms ANAFI Ai memprediksi apa yang akan menjadi cakrawala waktu singkat nominal di masa depan. Prediksi ini disimpulkan dari tautan yang dikirimkan oleh pengguna, apakah itu perintah penerbangan dari remote control, titik arah untuk dilampirkan ke rencana penerbangan, atau lintasan input. Kemudian, dengan menggunakan model drone internal yang disimulasikan, algoritme penjadwalan ulang menghitung koreksi sekecil mungkin terhadap lintasan nominal yang diprediksi ini yang membuatnya bebas tabrakan dan layak untuk drone.
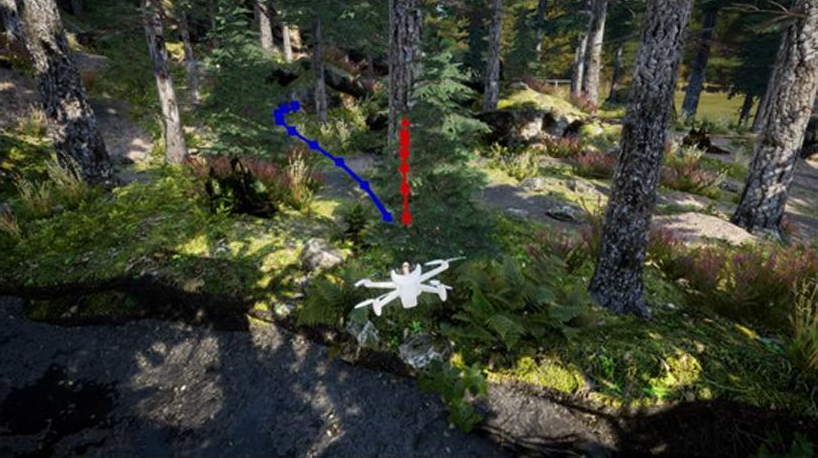 Contoh lintasan yang disesuaikan yang dihitung oleh algoritma penghindaran rintangan dalam menanggapi tabrakan lintasan referensi dengan pohon.
Contoh lintasan yang disesuaikan yang dihitung oleh algoritma penghindaran rintangan dalam menanggapi tabrakan lintasan referensi dengan pohon.
Sistem penghindaran rintangan ANAFI Ai dirancang untuk beroperasi pada kecepatan hingga:
- Level penerbangan: 29 km / jam
- Pendakian: 14 km / jam
- Keturunan: 11 km / jam
Performa penghindaran terbatas pada hujan atau angin kencang, cahaya redup, atau navigasi satelit terganggu. Selain itu, sebelum terbang, Anda harus memastikan bahwa lensa sistem penginderaan bersih.
Misi Penerbangan

Fitur Utama
Udara SDK (lihat.bagian SDK) memungkinkan pengembang untuk mengakses setiap sensor drone, kamera, antarmuka konektivitas, dan fungsi mandiri. Oleh karena itu, mereka dapat menyesuaikan perilaku drone untuk membuat misi penerbangan. Setiap misi penerbangan berisi seperangkat perilaku atau mode dasar:
- Di darat: Perilaku saat mesin dihentikan, misalnya kalibrasi sensor.
- Lepas landas: berbagai strategi lepas landas
- Melayang: menahan titik tetap
- Penerbangan: manual fungsi dan penerbangan otonom
- Pendaratan: berbagai strategi pendaratan
- Kritis: setelah mendeteksi keadaan kritis
Misi penerbangan khusus dapat membuat perilaku baru atau menggunakannya kembali dari misi default.
Harga dan ketersediaan
Penjualan drone ANAFI Ai dijadwalkan untuk September 2021. Informasi harga belum diungkapkan saat ini. Kami terus memantau informasi yang masuk dan pasti akan memperbarui bagian ini di kemudian hari.

Dokumentasi untuk diunduh
Dokumentasi untuk berkenalan dengan produk dari pengembang:
Video
Ulasan teratas ANAFI Ai dari pengembang dan pengguna
Pembongkaran dan penerbangan pertama.
Uji terbang drone pada jarak dengan koneksi 4G. Total waktu penerbangan adalah 29 menit pada kecepatan penerbangan horizontal rata-rata 58 km / jam (16 m / s). Selama ini, drone mampu menempuh jarak 27 km. Anda juga dapat melihat bahwa penerbangan dilakukan dalam kondisi angin kencang, yang terus-menerus diperingatkan oleh sistem drone.
.






