
- 1 Wstęp
- 2 Deweloper o maszynie
- 3 Cechy
- 4 Opakowanie spis treści
- 5 Specyfikacja
- 5.1 Dron
- 5.2 Komunikacja
- 5.3 System nawigacyjny
- 5.4 Skycontroller 4
- 5.5 Inteligentny akumulator samolotu
- 5.6 Aplikacja
- 5.7 Kamera
- 5.8 Tryby lotu autonomicznego
- 5.9 Cyberbezpieczeństwo
- 5.10 Parrot SDK
- 6 Wygląd
- 7 Komunikacja
- 7,1 4G
- 7,2 zasięg przy połączeniu 4G
- 7.3 Wi-Fi
- 7.4 Wideo na żywo
- 8 Kamera
- 8.1 Matryca 48MP
- 8.2 Obiektyw
- 8.3 Tryby wideo
- 8,4 Kodowanie wideo
- 8,5 HDR
- 8,6 Tryby zdjęć
- 9 Stabilizacja hybrydowa
- 9.1 Gimbal kamery głównej
- 10 Fotogrametria
- 10.1 Inspekcja i kartografia
- 10.2 Możliwości AI i 4G
- 10.3 Lot autonomiczny
- 11 Fotogrametria lub lidar
- 11.1 Zalety fotogrametrii
- 11.2 Wady LIDAR
- 12 SDK
- 12.1 Powietrze SDK
- 12.2 Naziemne SDK
- 12.3 OpenFlight
- 12.4 Sfinks
- 12,5 Olympe
- 12,6 PdrAW
- 12,7 Modele C. A. D.
- 12.8 Kompatybilność MAVLink i GUTMA
- 13 Największy ekosystem partnerski dla dronów Parrot
- 13.1 Parrot dla dowolnych potrzeb biznesowych
- 14 Cyberbezpieczeństwo
- 14,1 Prywatność danych
- 14,2 Zgodny z FIPS140 -2 i certyfikowany przez CC EAL5 Secure Element
- 14.3 Bezpieczne połączenie 4G i silne uwierzytelnianie
- 14.4 Bezpieczna inicjalizacja i aktualizacja
- 14.5 Ustawianie kluczy użytkownika na zabezpieczonym elemencie
- 14.6 Cyfrowo podpisane zdjęcia
- 14.7 Przejrzystość i ciągła kontrola bezpieczeństwa z bug bounty
- 15 Zarządzanie danymi
- 15.1 Zebrane dane
- 15.2 Ostateczne wykorzystanie zebranych danych [1 26]
- 15,3 Doskonalenie sztucznej inteligencji (AI)
- 16 Charakterystyka lotu
- 16,1 Charakterystyka aerodynamiczna
- 16,2 Siłowniki i aerodynamika
- 16,3 Czujniki
- 16,4 Charakterystyka czujników
- 16,5 Autopilot
- 17 Lot autonomiczny
- 17.1 Najważniejsze cechy
- 17.2 Strategia systemu percepcji
- 17,3 Czujniki
- 17.4 Podwójne zawieszenie
- 17.5 Rekonstrukcja otoczenia
- 18 Misje lotnicze
- 18.1 Kluczowe cechy
- 19 Cena i dostępność
- 20 Pobierz dokumentację
- 21 Filmy
Wprowadzenie [16 4]
Parrot Anafi Ai to zupełnie nowe unikalne rozwiązanie od znanego francuskiego deweloperakomercyjnego użytku
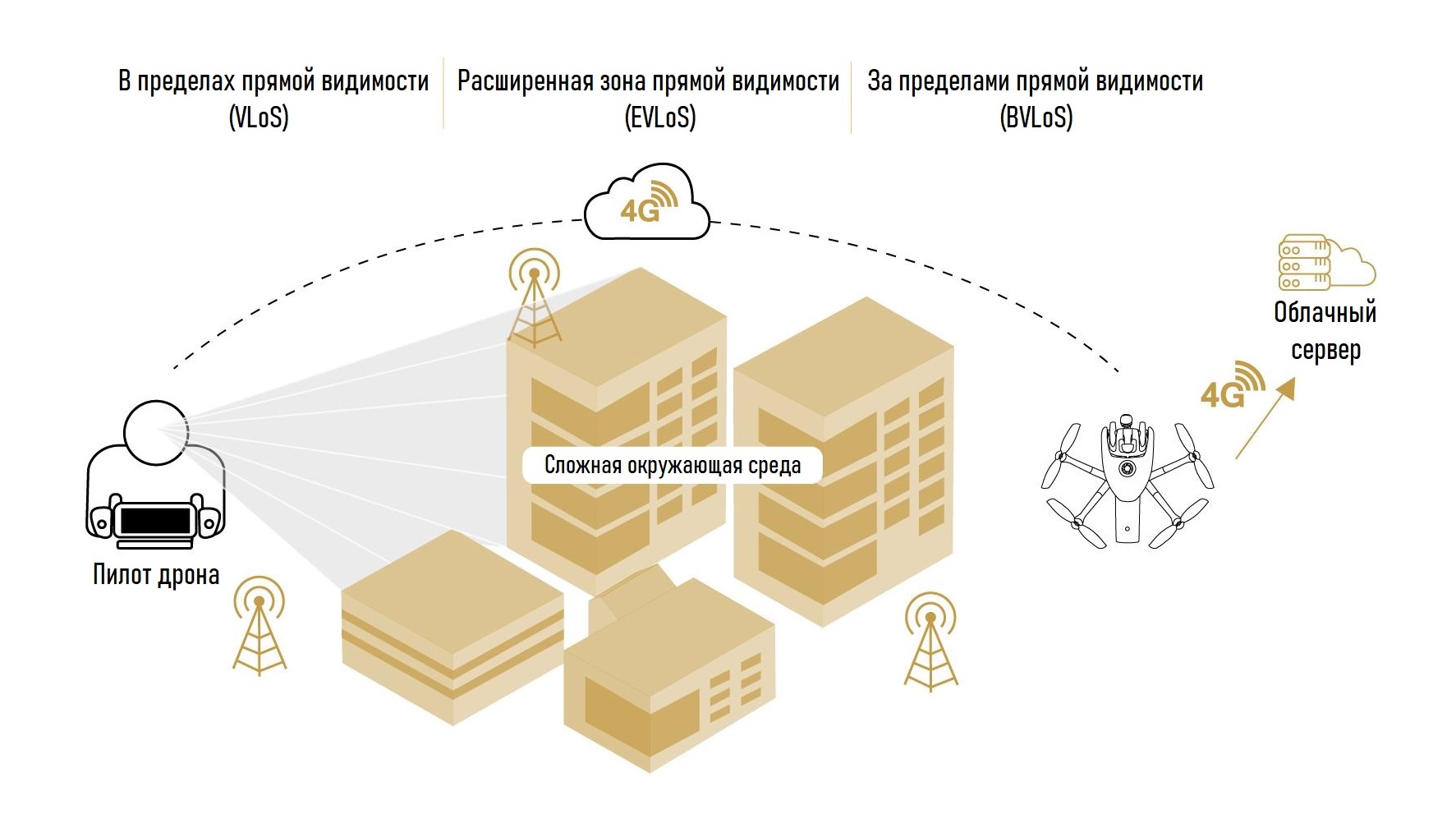
Wizytówką Anafi Ai jest wbudowany moduł 4G, dzięki któremu dron mógł wykorzystywać czwartą generację komunikacji mobilnej jako główny kanał transmisji danych pomiędzy dronem a sprzętem sterującym, co de facto znosi wszelkie ograniczenia dotyczące zasięgu lotu i z góry określa działanie UAV poza zasięgiem wzroku. Patrząc w przyszłość, zauważamy, że deklarowany potencjał maszyny okazał się niezwykle potężny i bardziej niż kiedykolwiek odpowiada jej futurystycznemu wyglądowi, który zainspirowała natura do stworzenia francuskich inżynierów.
Deweloper o samochodzie
Martin Liné, dyrektor marketingu w Parrotdrony Parrot

Cechy
Najważniejsze cechy Parrot Anafi Ai:
- Waga 898 gramów
- Czas lotu 60 sekund
- Unikalna przenośna składana konstrukcja
- Wbudowany moduł komunikacyjny 4G do pełnej interakcji z dronem / sprzętem sterującym bez ograniczeń w każdych warunkach środowiskowych
- Kompatybilny z LTE na całym świecie
- Wyposażony w system dookólnej transmisji sygnału (4 anteny kierunkowe z reflektorem (o zysku: anteny 2,5 dBi/s). Dron określa najlepszą parę anten w zależności od jej orientacji i położenia względem pozycji pilota)
- Wyposażony w unikalny dookólny system obrazowania otaczającego świata zbudowany na parze kamer stereoskopowych zamontowanych na specjalistycznym gimbalu o zakresie obrotu 330 stopni (od -120° do 210°), współpracując z inteligentnym systemem optymalizacji. tory lotu
- Przystosowany do lotów w pomieszczeniach
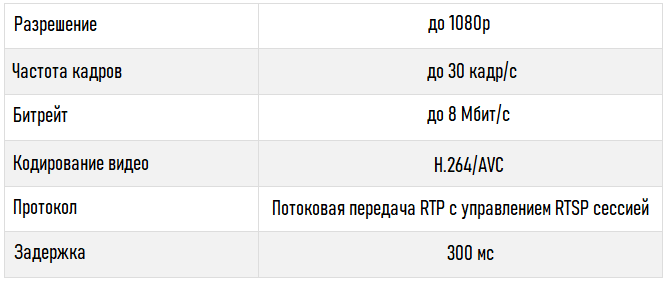
- Strumieniowanie wideo na żywo w rozdzielczości 1080p z małym opóźnieniem (300 m/s) bez ograniczeń zasięgu w dowolnym miejscu na świecie, z przepływnością wideo 12 Mb/s
- Możliwość przesyłania plików do chmury bezpośrednio w locie
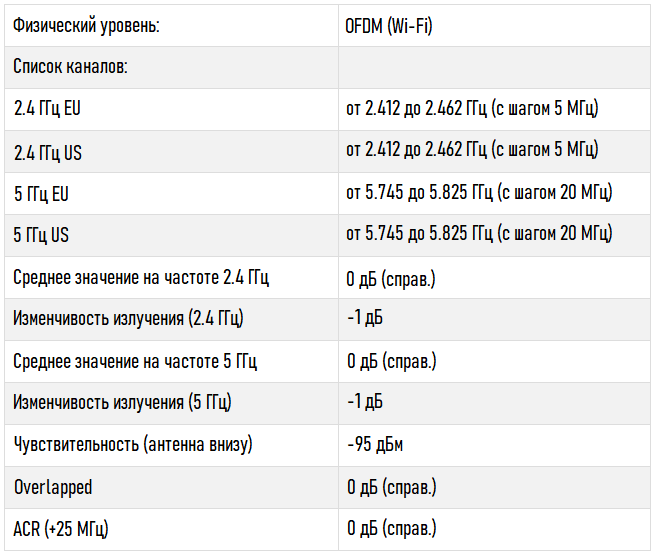
- Wbudowany moduł komunikacji Wi-Fi (Wi-Fi 802.11a / b / g / n) do pełnej kontroli interakcji drona / sprzętu (jak alternatywna opcja połączenia)
- Slave. Zakres częstotliwości Wi-Fi: 2,4 GHz / 5,8 GHz
- Max. zasięg lotu FPV przez Wi-Fi: 9 km
- Unikalny automatyczny tryb pracy modułów 4G/Wi-Fi, który pozwala, w oparciu o przeciążenie sieci, płynnie przełączać się z jednej technologii komunikacji na drugą bez utraty danych
- Klasa ochrony drona IPX3
- Max. czas lotu 32 min
- Max. prędkość lotu poziomego 61 km/h
- Max. odporność na wiatr: 13 m/s
- Max.sufit nad poziomem morza 5000 m
- kamera 48MP 4K zbudowana na 1/2-calowej matrycy CMOS o wielkości piksela 0,8 μm; z wbudowaną matrycą filtrów barwnych Bayer
- Optyczny obiektyw LD-ASPH
- Hybrydowy 6-osiowy system stabilizacji obrazu (3-osiowy mechaniczny 3-osiowy cyfrowy EIS)
- Kontrolowany zakres pracy Gimbal -90 ° do 90 °
- 6x bezstratny zoom cyfrowy (2x 4K / 4x FHD)
- Max. przepływność wideo 200 Mb/s
- Formaty nagrywania wideo HDR8 / HDR10
- Max. zakres dynamiczny 14EV
- Profil kolorów P-log do przetwarzania końcowego
- 5 × automatyczny tryb lotu i fotografowania (Fotogrametria / Plan lotu / Kamerzysta / Smart RTH / Pojazd)
- Wbudowane gniazda na karty MicroSD i SIM
- Zgodne z PIX4D Suite
- Fotogrametryczne tryby lotu są dostępne w mob. Aplikacja FreeFlight 7 i oprogramowanie OpenFlight
- Tworzenie planu lotu jednym kliknięciem
- Fotogrametria 48MP 1 fps: dwa razy szybciej niż u konkurencji
- Dokładność strzału: 0,46 cm / piks. GSD na 30m
- Obsługa Parrot SDK (z możliwością osadzenia kodu w dronie za pomocą Air SDK, tworzenie aplikacji mobilnych za pomocą Ground SDK, konfigurowanie stacji naziemnej open source za pomocą OpenFlight, interakcja z nowoczesnym Sphinxem narzędzie do symulacji dronów, a także skrypty Pythona z Olympe oraz przetwarzanie wideo i metadanych z PdrAW)
- Kompatybilny z oprogramowaniem innych firm: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- ANAFI Ai zgodny z ogólnymi Regulacje Rozporządzenie Unii Europejskiej o ochronie danych (RODO)
- Wyższa ochrona danych dzięki wbudowanemu elementowi NIST FIPS140-2 Poziom 3 WISeKey Secure Element z certyfikatem Common Criteria EAL5
- Wideo i sterowanie chronione za pomocą SRTP / DTLS według webRTC
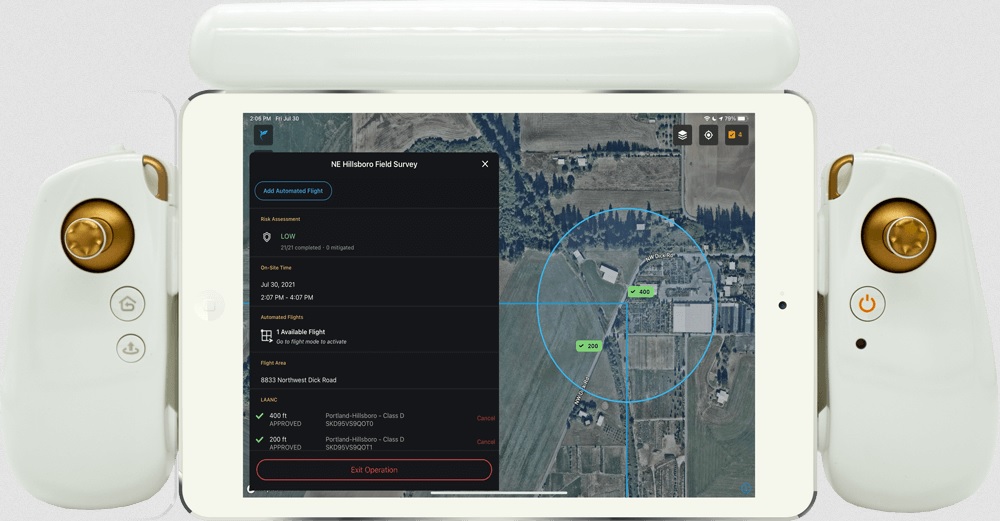
- Nowy przenośny sprzęt sterujący Parrot Skyco ntroller 4
- Nowa aplikacja mobilna Parrot FreeFlight 7

Pakiet
Deweloper oferuje drona w jednej konfiguracji, która będzie zawierać:
- Dron ANAFI Ai
- Sztywna walizka transportowa
- Osprzęt sterujący Parrot Skycontroller 4
- 1 × Smart bateria
- Ładowarka USB-PD
- Zapasowy zestaw śmigła (2CW / 2CCW)
- Kabel towarzyszący (USB-C do Lightning)
- 2 × kable towarzyszące (USB-C do USB-C)
- Tabela kalibracji

Specyfikacja
Samolot

Komunikacja
System nawigacji
Skycontroller 4

Inteligentny akumulator samolotu
App

Aparat

Tryby lotu autonomicznego
Cyberbezpieczeństwo
Parrot SDK
może zapoznać się z kluczowymi informacjami Parrot Anafi Ai, które pozwolą dowiedzieć się więcej o deklarowanym potencjale maszyny, a także jakie ulepszenia zostały wdrożone w porównaniu z komercyjną wersją drona Parrot Anfi Thermal i inne drony wiodących marek.
Wygląd





Komunikacja
4G
ANAFI Ai zawiera moduł radiowy 4G (oprócz moduł radiowy Wi-Fi), który pozwala na nadawanie strumienia wideo w jakości 1080p z maksymalną przepływnością 12 Mb/s, z bardzo małym opóźnieniem (300 ms), bez ograniczenia zasięgu i w dowolnym miejscu na świecie.
Kompatybilność
Moduł ANAFI Ai 4G obsługuje ponad 28 pasm częstotliwości, pokrywając ponad 98% częstotliwości rozmieszczonych na całym świecie.
Automatyczny przełącznik sieci
Jakość i przepustowość sieci 4G i Wi-Fi są mierzone co 100ms w celu dostosowania przesyłania strumieniowego do warunków sieciowych. W połączeniu z algorytmami routingu połączenie między dronem a jego kontrolerem jest utrzymywane nawet w przypadku poważnych zakłóceń Wi-Fi. Tak więc, gdy efektywna przepustowość (przepustowość użytkowa) Wi-Fi jest poniżej 1,5 Mb/s, system automatycznie przełączy się na 4G.
Aby ograniczyć zużycie danych mobilnych, gdy pilot znajduje się w zasięgu sieci Wi-Fi drona, przejście z 4G na Wi-Fi odbywa się również automatycznie bez odcinania strumienia wideo.
Max. zasięg z połączeniem 4G
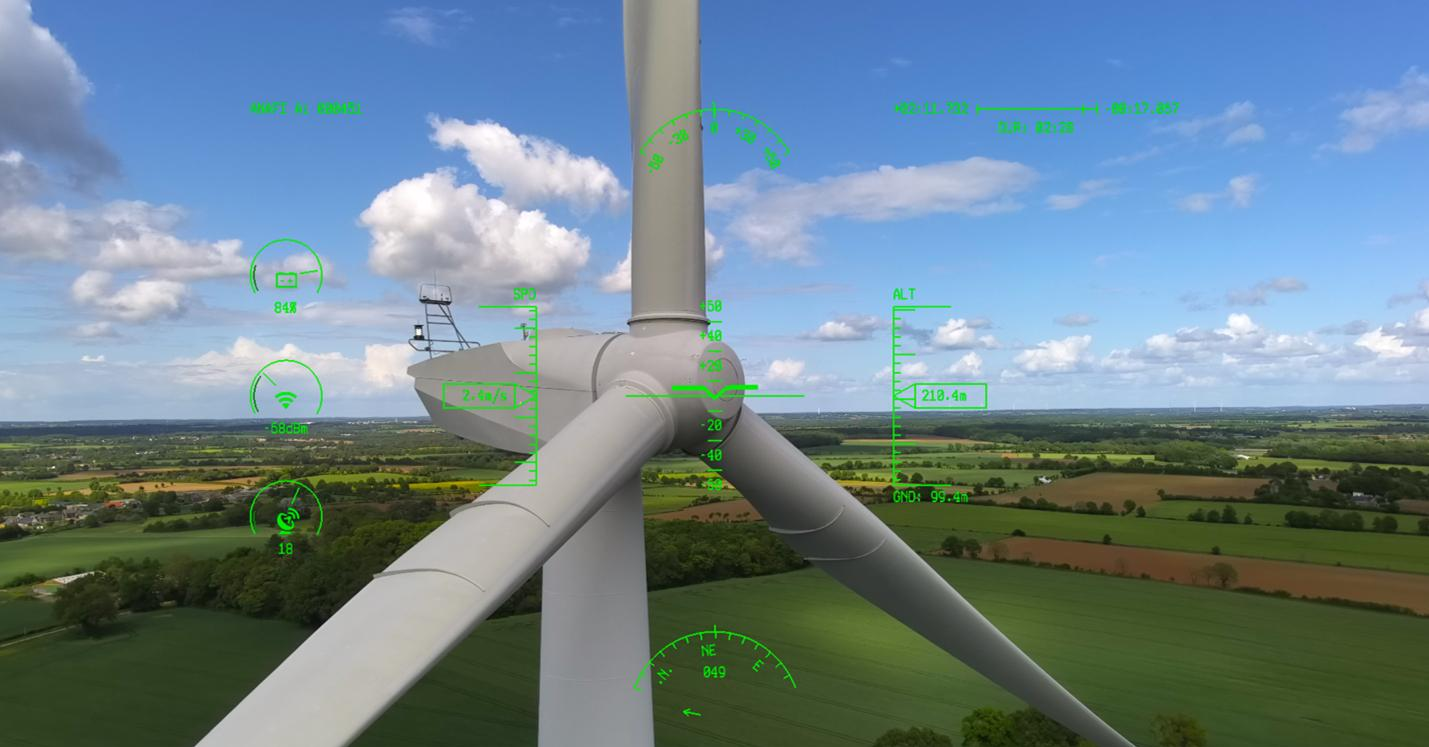
Film od dewelopera pokazuje max. zasięg lotu Anafi Ai z połączeniem 4G w jednym kierunku na jednym ładowaniu akumulatora. Całkowity czas lotu wyniósł 29 minut przy średniej poziomej prędkości lotu 58 km/h (16 m/s). W tym czasie dron był w stanie pokonać 27 km. Można również zauważyć, że lot odbywał się w warunkach silnego wiatru, o czym nieustannie ostrzegał system dronów.
Zaimplementowane algorytmy optymalizacji strumienia wideo
Kontrola przeciążenia 4G
Algorytm kontroli przeciążenia umożliwia:
- Pomiar utraty pakietów w całym cyklu sieci.
- Zmierz opóźnienie (czas podróży w obie strony).
- Dostosuj przepustowość zgodnie z tymi dwoma parametrami.
Ostatecznym celem algorytmu jest maksymalizacja dostępnej przepustowości przy zachowaniu możliwie najniższego opóźnienia. Algorytm ten jest zaimplementowany na każdym z interfejsów dostępnych w dronie, każdy z własnymi parametrami, zoptymalizowanymi zgodnie z siecią. Na podstawie informacji dostarczonych przez ten algorytm menedżer łączy podejmuje decyzje dotyczące routingu i aktywnego interfejsu.
Sterowanie dronem przez połączenie 4G
ANAFI Ai łączy się z pilotem przez 4G w mniej niż 30 sekund, jeśli dron jest poza zasięgiem Wi-Fi i w mniej niż 15 sekund jeśli dron znajduje się w zasięgu Wi-Fi. A także połączenie 4G zapewnia:
- Wykrywanie i inicjowanie połączenia w oparciu o protokół VOIP SIP.
- Użyj serwera przekazującego, aby nawiązać połączenia w bezpiecznych sieciach.
Wydajność strumienia wideo
- Opóźnienie: 300 ms.
- Bezpieczeństwo: wideo i sterowanie są chronione za pomocą SRTP / DTLS zgodnie z webRTC.
- Anteny: 28 pasm LTE od 700 MHz do 2,6 GHz.

Wi-Fi
Transmisja dookólna
- ANAFI Ai posiada 4 kierunkowe anteny reflektorowe (o zysku anteny: 2,5 dBi/s). Dron określa najlepszą parę anten na podstawie swojej orientacji i położenia względem pozycji pilota.
- Przy rekombinowanym wzmocnieniu 3,5 / - 1,5 dBi w płaszczyźnie poziomej drona, wzmocnienie ANAFI Ai RF jest bardzo równomierne.
- Promieniowanie anteny pobieranej zostało poprawione o 4 dB w porównaniu z ANAFI.
Zewnętrzna budowa radia dużej mocy
Przód radia maksymalizuje moc u podstawy anteny z bardzo dobrą liniowością i czułość (-94 dBm przy 6,5 Mb/s), aby osiągnąć maksymalną moc graniczną FCC.

Niezawodność Wi-Fi
Parametry 802.11
mała przepustowość, małe opóźnienia, zmienność poziomu odbioru ze względu na prędkość dron, daleki zasięg, obecność zakłóceń. Parametry te obejmują agregację, liczbę ponownych prób, technologię MiMo (STBC), szybkość transmisji ramek kontrolnych i warunki rozłączenia.
Inteligentna ochrona przed zakłóceniami
ANAFI Ai posiada algorytm usuwania kanałów (dwuzakresowy 2,4 GHz i 5 GHz) w przypadku zakłóceń.
Adaptacja i monitorowanie przepływu
ANAFI Ai stale monitoruje stan swojego łącza 4 Hz i może wykrywać zakłócenia. Pozwala to na dynamiczną optymalizację przepustowości i rozmiaru przesyłanych pakietów. Ostrzega również pilota, jeśli znajduje się w szczególnie zakłócającym środowisku lub grozi mu utrata sygnału.
Redukcja szerokości pasma
Na granicy swojego zasięgu i jeśli pozwalają na to warunki, ANAFI Ai może przełączyć się na pasmo 10 MHz, aby poprawić swoją czułość o 3 dB i zwiększyć zasięg o 40%.

Wskaźniki radiowe
Transmisja wideo
Wskaźniki połączenia wideo
Zaimplementowane algorytmy optymalizacji strumienia wideo
Parrot Gen4 Streaming (4. generacja)
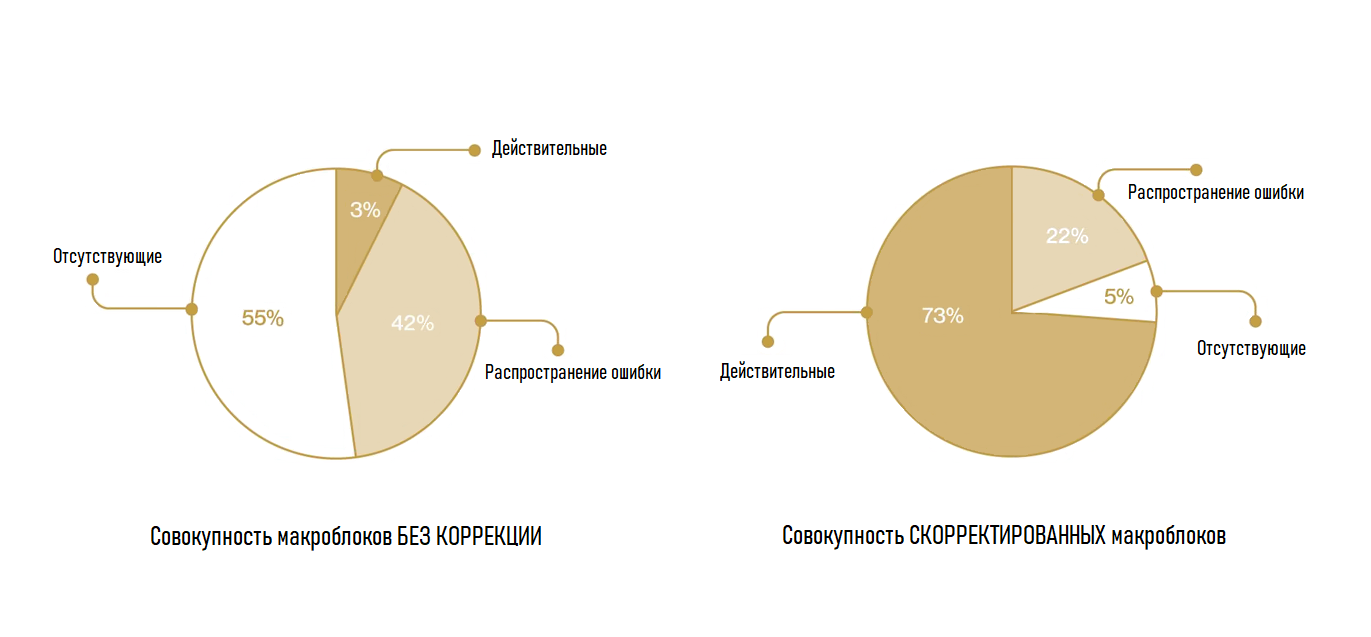
Algorytm ten zmniejsza wizualny wpływ strat sieciowych i zapewnia interoperacyjność wszystkie dekodery, zapewniając jednocześnie pełny składniowo strumień: brakujące części obrazu są odtwarzane jako brakujące części, identyczne z tymi w obrazie referencyjnym.
Zatem uskoki są zawarte w tych obszarach, które są podatne na utratę i nie dotyczą całego obrazu.
Poniższe wykresy pokazują wskaźnik powodzenia dekodowania makrobloków przy 5% utracie sieci - z ulepszonymi funkcjami przesyłania strumieniowego ANAFI Ai i bez nich. Algorytm zapewnia poprawne dekodowanie 75% makrobloków. Pozwalają użytkownikowi kontynuować misję bez zamrażania ekranu lub utraty transmisji.
Kontrola przeciążenia
Algorytm ocenia również środowisko Wi-Fi i radiowe w celu przewidywania i unikania utraty pakietów i przeciążenia sieci, co pomaga zmniejszyć opóźnienia. Algorytm opiera się na oszacowaniu przepustowości kanału, obliczonej na podstawie szybkości transmisji danych i stopy błędów w warstwie fizycznej; następnie wpływa na kodowanie sieci i parametry enkapsulacji.
Metadane
Metadane są przesyłane ze strumieniem wideo. W szczególności zawierają elementy telemetrii drona (pozycja, wysokość, prędkość, poziom naładowania baterii itp.) oraz metryki wideo (kąt kamery, wartość ekspozycji, pole widzenia itp.).
Synchronizacja obrazów i otwartych metadanych pełni funkcje precyzyjnego pozycjonowania na mapie, śledzenia instrumentów lotniczych w HUD, czy włączania elementów rozszerzonej rzeczywistości.
Metadane są dołączane przy użyciu standardowych metod (rozszerzenie nagłówka RTP); format danych zdefiniowany przez Parrot jest open source: jest dostępny w ANAFI Ai SDK.
Aparat

Czujnik 48MP
Matryca ANAFI Ai zawiera dużą liczbę megapiksele do szczegółowej fotografii lotniczej.
Wykorzystuje technologię matrycy filtrów kolorów Quad Bayer, w której grupy 4 sąsiednich pikseli mają ten sam kolor. W ten sposób przechwytywanie HDR w czasie rzeczywistym można uzyskać zarówno w trybie zdjęć, jak i wideo, dodając sygnały z czterech sąsiednich pikseli.
Jego zakres dynamiczny jest 4 razy większy niż w standardowych matrycach Bayera. Nawet złożone sceny można filmować z minimalnym podświetleniem lub utratą szczegółów w cieniach.
Obiektyw
Obiektyw ANAFI Ai został opracowany specjalnie dla Parrot. Łączy 6 elementów asferycznych i jest zoptymalizowany pod kątem redukcji odblasków optycznych. Ten obiektyw daje 68° HFoV w standardowym trybie wideo i 64,6 ° HFoV w standardowym trybie zdjęć.

Tryby wideo
ANAFI Ai rejestruje płynne wideo 4K przy 60 klatkach na sekundę, w tym P-Log, a także HDR10 4K wideo z prędkością do 30 klatek na sekundę. Poniższa tabela zawiera wszystkie tryby wideo ANAFI Ai.

Kodowanie wideo
Użytkownicy mogą wybierać pomiędzy H.264 (AVC) i H.265 (HEVC).
Wszystkie rozdzielczości wykorzystują następujące formaty pikseli:
- YUV420p (8-bpc przestrzeń kolorów BT.709) dla trybu standardowego i HDR8.
- YUVJ420p (8 bitów / komponent, pełny zakres - przestrzeń kolorów BT.709) dla stylu P-log.
- YUV420p10 (przestrzeń kolorów 10bpc BT.2020) do nagrywania HDR10, tylko H.265.
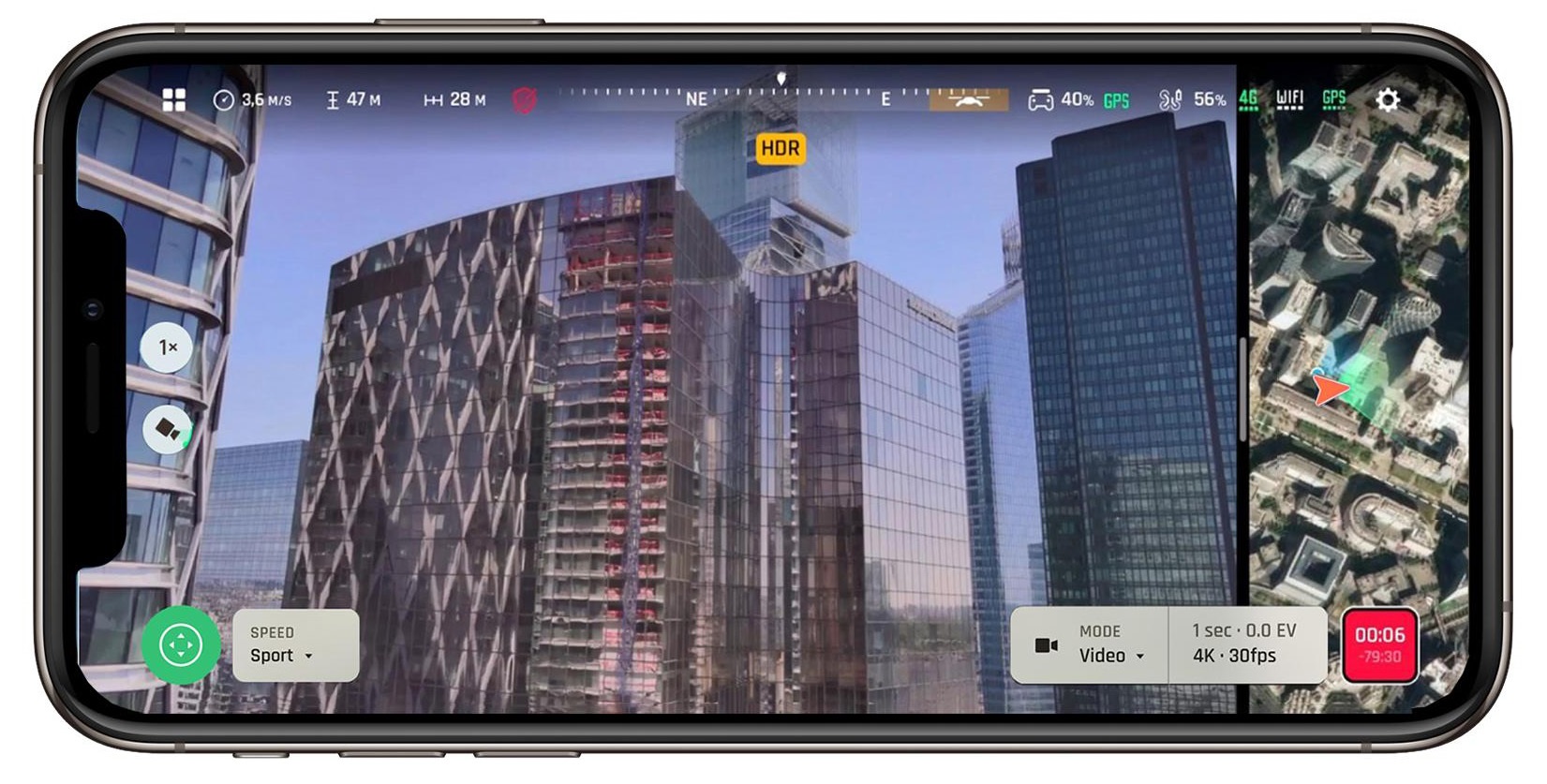
HDR
Podczas nagrywania wideo w HDR8 i HDR10, ANAFI Ai obejmuje zakres dynamiczny 14EV. Format HDR10 oferuje maksymalną jasność 1000 nitów i 10-bitową głębię kolorów. Zapewnia miliardową gamę kolorów w porównaniu z 16 milionami dla standardowego zakresu dynamicznego. W porównaniu do HDR8, HDR10 daje obrazy ponad dwukrotnie jaśniejsze z odpowiednim wzrostem kontrastu. HDR8 może być wyświetlany na dowolnym standardowym ekranie, podczas gdy HDR10 jest przeznaczony dla telewizorów i ekranów HDR10.
Tryby zdjęć
Opis trybów
Sekcja Sterowanie trybami zawiera ustawienia, które wpływają na liczbę zdjęć wykonywanych przy każdym zwolnieniu migawki.
Tryb pojedynczego przechwytywania
Standardowy tryb pojedynczego przechwytywania. Po każdym zwolnieniu migawki przechwycony obraz jest natychmiast przetwarzany przez system.
Tryb braketingu
Użytkownicy mogą wykonać serię 3, 5 lub 7 klatek z różną ekspozycją dla każdej klatki. Dostępne są następujące ustawienia wstępne:
- [-1 EV, 0, 1 EV] (ustawienia domyślne)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

Tryb zdjęć seryjnych
Tryb zdjęć seryjnych umożliwia użytkownikowi wykonanie serii 10 klatek w ciągu 1 sekundy.
Tryb Panorama
Tryb Panorama obejmuje cztery różne ujęcia panoramiczne:
- Sferyczny (360°) to tryb panoramiczny zawierający trzy opcje fotografowanie sferycznej panoramy: Kula / Mała Planeta / Tunel.
- Poziomy (180°)
- Pionowy (109°)
- Superwide - nowy super Tryb szerokiego łączenia 9 obrazów (HFOV 110 °, panorama prosta)
Szczegółowe informacje na temat specyfikacji trybu panoramy można znaleźć w tabeli poniżej:

Tryb poklatkowy
Ten tryb umożliwia robienie zdjęć w następujących stałych odstępach czasu:
- 48MP: 1, 2, 4, 10, 30 lub 60 sekund.
- 12MP: 0,5, 1, 2, 4, 10, 30 lub 60 sek.
Tryb GPS Lapse
Ten tryb fotograficzny został opracowany do inspekcji i fotogrametrii. Umożliwia robienie zdjęć w stałych odstępach odległości: 5, 10, 20, 50, 100 lub 200 metrów.
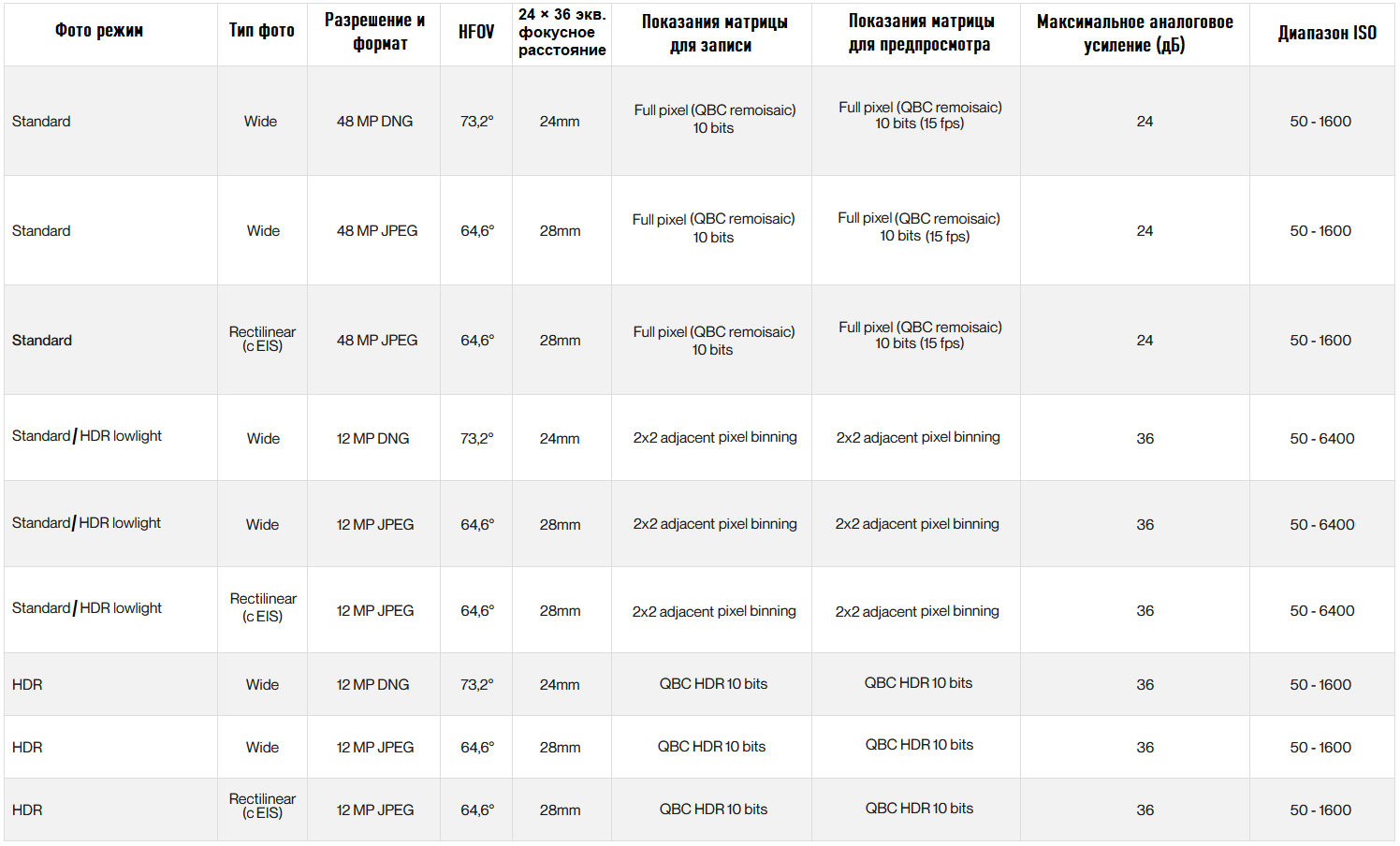
Poniższa tabela przedstawia tryby i rozdzielczości przechwytywania zdjęć, w tym tryb odczytu z czujnika:
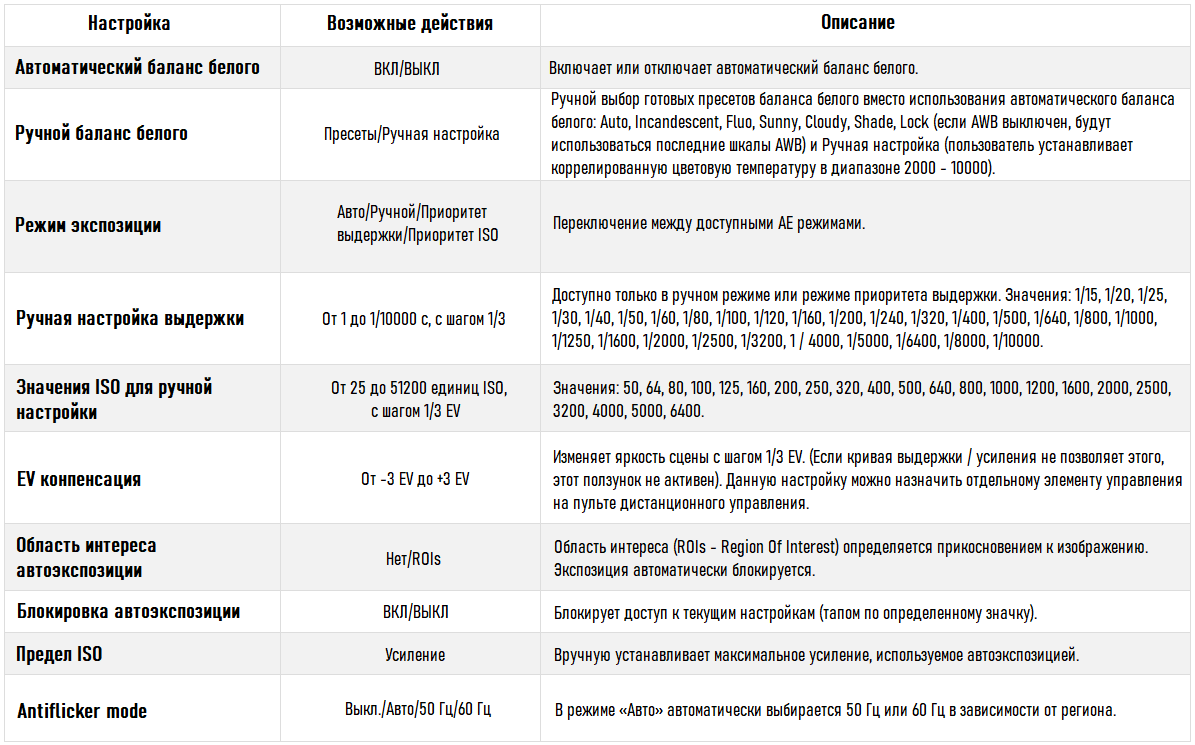
Ustawienia
tabela zawiera dostępne ustawienia dla każdego trybu.
6-krotny zoom
Zoom jest dostępny we wszystkich trybach zdjęć i wideo. W połączeniu z 48-megapikselową matrycą precyzyjne algorytmy wyostrzania zapewniają obrazy o wysokiej rozdzielczości nawet przy użyciu 6-krotnego zoomu cyfrowego. Użytkownicy ANAFI Ai mogą teraz zobaczyć szczegóły 1 cm z odległości 75 m. Wysoka liczba pikseli umożliwia również przycinanie wideo 4K do 1080p bez utraty jakości.

Hybrydowa stabilizacja
ANAFI Ai posiada najdokładniejszą stabilizację na rynku micro UAV.
Łączy stabilizację kombinowaną:
- 3-osiowa mechaniczna (3-osiowa mech. Gimbal)
- Elektroniczna 3-osiowa (EIS)
Mechaniczna stabilizacja stabilizuje oś skierowania kamery niezależnie od pozycji lotu drona. Elektroniczna stabilizacja obrazu koryguje efekty mikrowibracji dla częstotliwości powyżej 100 Hz, z którymi napęd mechaniczny sobie nie radzi.
Gimbal kamery głównej
Mechaniczna stabilizacja pozwala ustabilizować i zorientować oś poziomą widoku kamery we wszystkich 3 osiach.
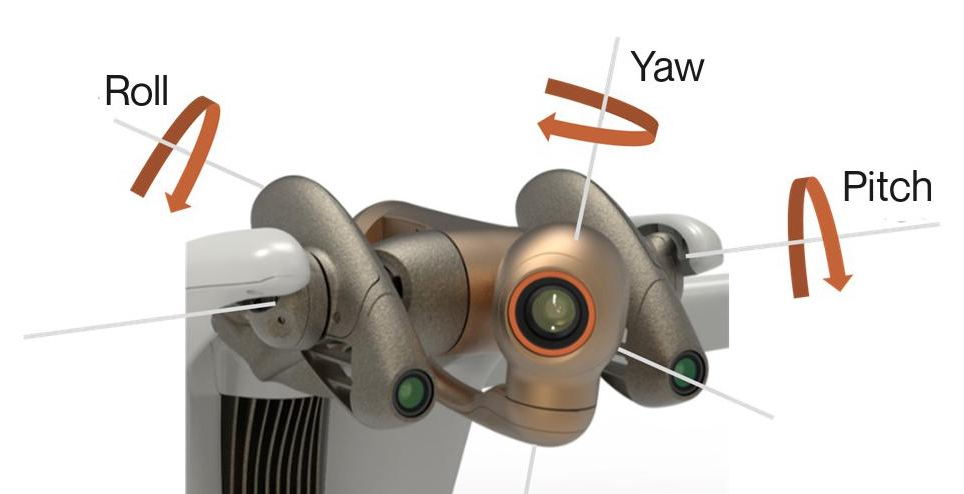 3 osie obrotu mech. zawieszenie głównego aparatu ANAFI Ai.
3 osie obrotu mech. zawieszenie głównego aparatu ANAFI Ai.
Najważniejsze cechy
- 3-osiowy mechaniczny gimbal do kamery głównej
- Przesunięcie w pionie 292 °, pole widzenia -116 ° do 176 °
Wydajność gimbala
- Algorytm EIS koryguje efekty chybotania i zniekształceń obiektywu szerokokątnego, a także wykonuje 3-osiowy obraz cyfrowy stabilizacja (przechylenie, pochylenie i odchylenie).
- Metoda polega na zastosowaniu geometrycznej transformacji obrazu. Transformacja geometryczna jest powiązana ze znacznikiem czasu i dokładną pozycją dzięki IMU.
- Transformacja geometryczna jest stosowana do każdego obrazu zgodnie ze zniekształceniem optycznym, wibracjami i ruchami mierzonej kamery.
Zakres obrotu 292 °
Kamera posiada zakres obrotu w poziomie -116 ° / 176 ° wokół osi pitch, zapewniając tym samym obserwację nad i pod dronem, co jest unikalna szansa na rynku mikro-BSP.
![]()
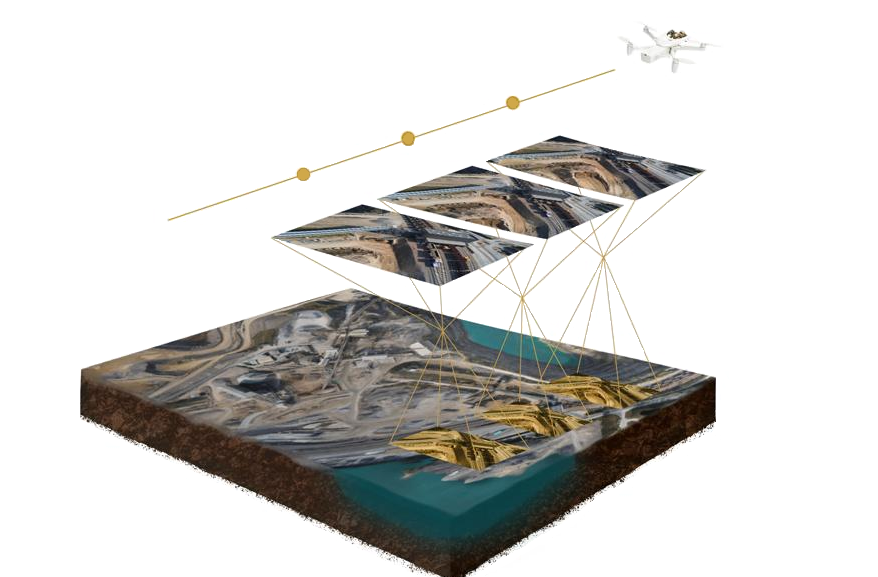
Fotogrametria
Fotografia lotnicza z użyciem bezzałogowych statków powietrznych zmienia sposób, w jaki specjaliści przeprowadzają inspekcje i pomiary. Metody fotogrametryczne służą do przetwarzania obrazów gromadzonych przez UAV w celu tworzenia modeli 2D i 3D, które później pozwalają klientom na terminowe zaplanowanie konserwacji badanych obiektów.
4G zapewnia bezprecedensową niezawodność łącza danych drona. Użytkownicy mogą obsługiwać UAV na dużych obszarach, w pobliżu konstrukcji metalowych, budynków, bez obawy o utratę łączności.
Inspekcja i Mapowanie
Dzięki połączeniu AI drona ANAFI Ai z platformą internetową PIX4Dinspect użytkownicy będą mogli prowadzić inspekcje szybciej i skuteczniej niż kiedykolwiek wcześniej. Algorytmy uczenia maszynowego rozpoznają anteny na wieżach komórkowych, określają ich rozmiar, wysokość, nachylenie, azymut i pionowość.
Kliknij na obrazki poniżej, aby zobaczyć demonstracyjne modele 3D wygenerowane przez ANAFI Ai.
Przykład # 1

Przykład # 2
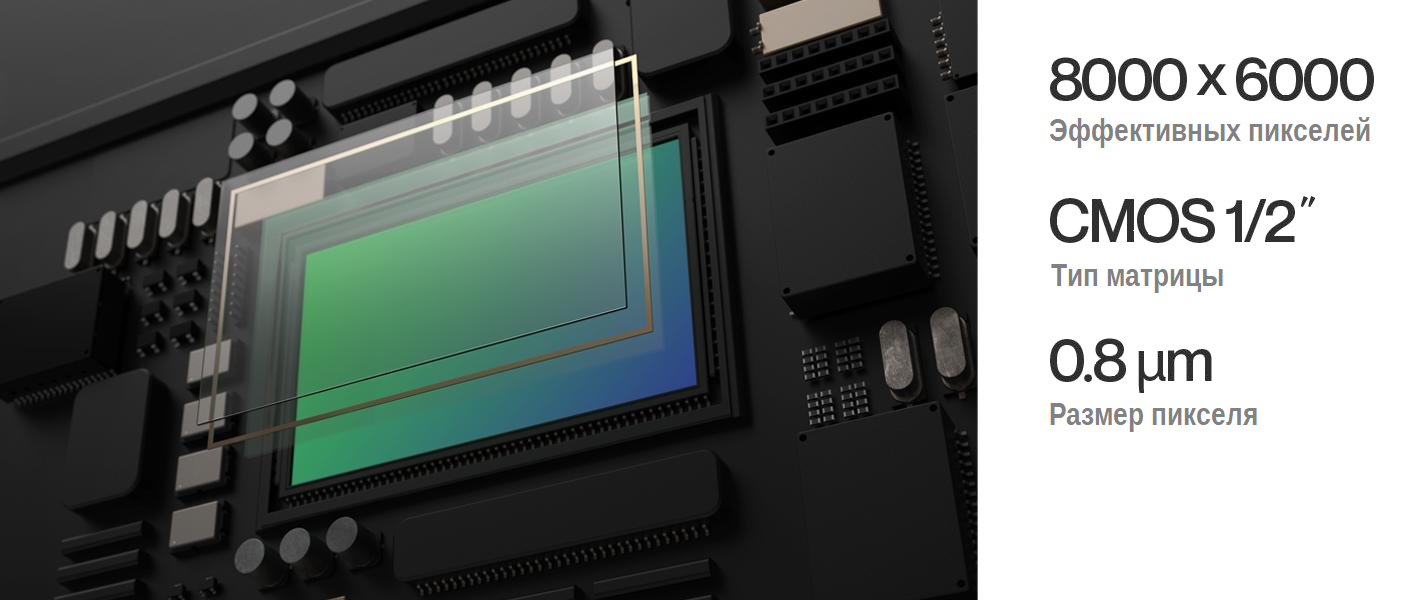
Matryca najlepsza w swojej klasie
Kamera drona ANAFI Ai jest wyposażona w 1/2-calowy czujnik CMOS 48 MP zbudowany przy użyciu technologii filtrów kolorów Quad Bayer, która jest bardziej niż kiedykolwiek odpowiednia do inspekcji i fotogrametrii. Zastosowana matryca pozwala na uzyskanie szczegółowych obrazów o szerokim zakresie dynamicznym.
Zdjęcia w wysokiej rozdzielczości
ANAFI Ai jest w stanie generować nieruchome obrazy o rozdzielczości 48 megapikseli, rejestrując w ten sposób wszystkie szczegóły w wysokiej rozdzielczości i tworząc chmurę punktów o dużej gęstości.
Znacząca ostrość
Misje inspekcyjne wymagają umiejętności identyfikacji najdrobniejszych szczegółów, takich jak numery seryjne, złącza, plamy rdzy i początkowe pęknięcia.
Szeroki zakres dynamiki
10 stopni zakresu dynamicznego w trybie standardowym, 14 stopni w trybie HDR. Optymalna gradacja obrazu jest niezbędna do tworzenia spójnych punktów chmur i wysokiej jakości rekonstrukcji 2D lub 3D.
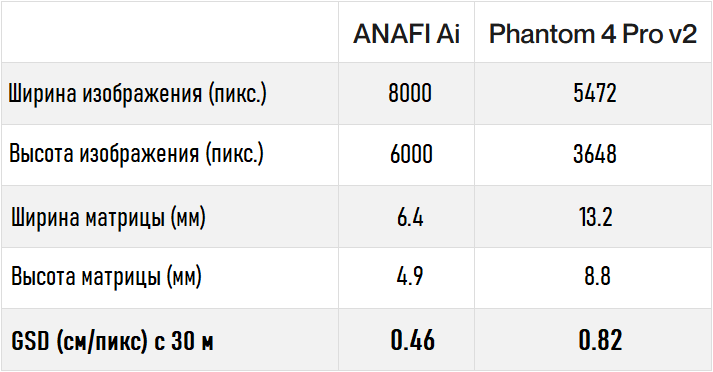
55% więcej szczegółów niż 1-calowe czujniki
1/2-calowy czujnik Quad Bayer 48MP drona ANAFI Ai jest ostrzejszy niż 1-calowe czujniki 20MP używane w wielu nowoczesne profesjonalne drony. Poniższe zdjęcia z inspekcji dachu ANAFI Ai i DJI Phantom 4 Pro V2.0 na tej samej wysokości wyraźnie pokazują ten fakt.

Idealny do inspekcji
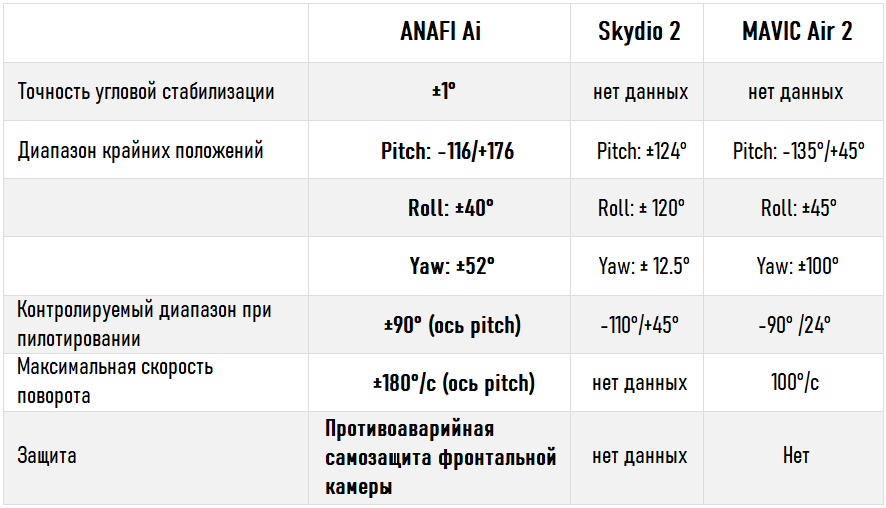
Gimbal ANAFI Ai zawiera 6-osiowy hybrydowy (mechaniczno-elektroniczny) system stabilizacji, który kompensuje wahania lotu i zapewnia ostrość obrazu. Kamera ANAFI Ai ma regulowany zakres od -90 ° do 90 °, dzięki czemu jest idealnym instrumentem powietrznym do oglądania dolnej części podstawy mostu.
Regulowany kąt nachylenia ± 90 °
Dokładność
ANAFI Ai pozwala na osiągnięcie GSD 0,46 cm/px z wysokości 30 m, co oznacza względną dokładność planimetrii do 0,92 cm
Dla porównania, przy tej samej wysokości DJI Phantom 4 Pro V2 zapewnia GSD tylko 0,82 cm/px. Innymi słowy, ANAFI Ai może mapować ten sam cel, lecąc ponad 1,5 raza wyżej niż Phantom, z równoważnym poziomem szczegółowości.
Możliwości AI i 4G
Jedna aplikacja. Dowolny plan lotu
Potencjał aplikacji mobilnej FreeFlight 7 pozwala użytkownikowi na uruchomienie wszystkich misji pomiarowych, inspekcyjnych i fotogrametrycznych.

Dostępne fotogrametryczne tryby lotu
Następujące fotogrametryczne tryby lotu są teraz dostępne w aplikacji mobilnej FreeFlight 7:
- Grid
- Podwójna siatka
- Okrągły
Utwórz plan lotu jednym dotknięciem
Wystarczy jedno dotknięcie interaktywnej mapy FreeFlight 3D do szybkiego skanowania budynku. Sztuczna inteligencja automatycznie określa optymalne parametry i trajektorię lotu. Obrazy 48 MP z dokładnym georeferencją czujników ANAFI Ai (IMU, GNSS i czasu lotu) umożliwiają dokładną rekonstrukcję 3D.
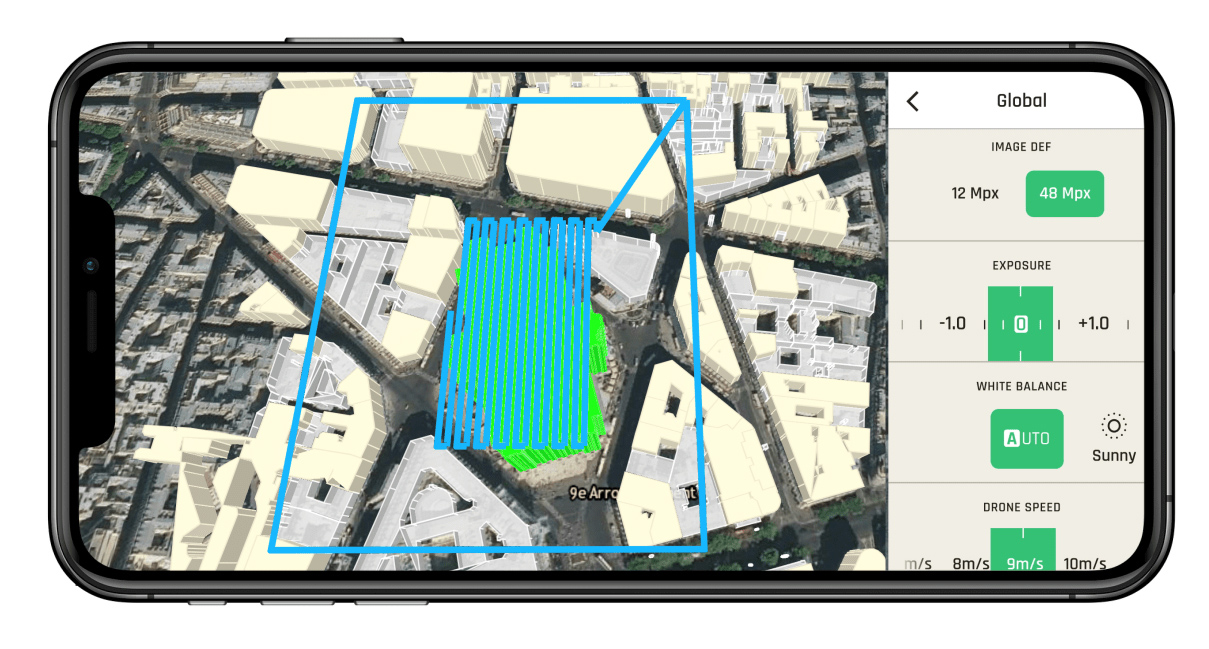 Automatyczny plan lotu tworzony jednym dotknięciem w ewidencji gruntów 3D.
Automatyczny plan lotu tworzony jednym dotknięciem w ewidencji gruntów 3D.
- Kartograficzne tło FreeFlight 7 pochodzi z oprogramowania ArcGIS. Reprezentacja budynków 3D oparta jest na danych OpenStreetMap obejmujących miasta na całym świecie.
- Systemy wizualizacji zapewniają bezpieczeństwo danego planu lotu: użytkownicy nie muszą martwić się przeszkodami. ANAFI Ai unika ich autonomicznie.
Lot autonomiczny
System czujników dookólnych ANAFI Ai, oparty na widzeniu stereoskopowym, automatycznie orientuje się w kierunku jazdy.

Dron wykrywa przeszkody oddalone o 30 m. Technologia AI stale buduje i aktualizuje siatkę wypełnień podczas wykonywania danego planu lotu. Reprezentuje środowisko dronowe w wokselach.
Algorytmy określają najlepszą trajektorię, aby uniknąć kolizji z przeszkodami, podczas gdy dron pozostaje skupiony na swoim celu: wyznaczonej misji lotu.

Połączenie 4G
ANAFI Ai to pierwszy komercyjny mikrodron wyposażony w moduł 4G. Obejmuje ponad 98% częstotliwości używanych na całym świecie.

Przegląd linii elektroenergetycznych wysokiego napięcia. Nakręcony za pomocą ANAFI Ai, edytowany za pomocą Pix4Dmatic. Rozmiar sceny: 4060 × 60 × 70 m. Liczba zdjęć: 2172. GSD: 1,3 cm / piks. Wysokość: 90 m. Nakładka przód/bok: 90% / 65%.
Dron jest w stanie płynnie przełączać się z Wi-Fi na 4G i odwrotnie, zapewniając w ten sposób najbardziej niezawodne połączenie, co z kolei gwarantuje:
- Możliwość wykonywać loty BVLOS
- Stabilne połączenie nawet podczas lotu w środowiskach z przeszkodami i budynkami
- Bezpieczne latanie w środowiskach o wysokim poziomie hałasu
- Jakość łącza wideo 1080p @ 30 fps
- Bezpośrednie przesyłanie obrazów na serwery w chmurze

Optymalizacja czasu lotu
Według dewelopera osiągnięto znaczne oszczędności czasu dzięki wysokiej wydajność obrazu ANAFI Ai:
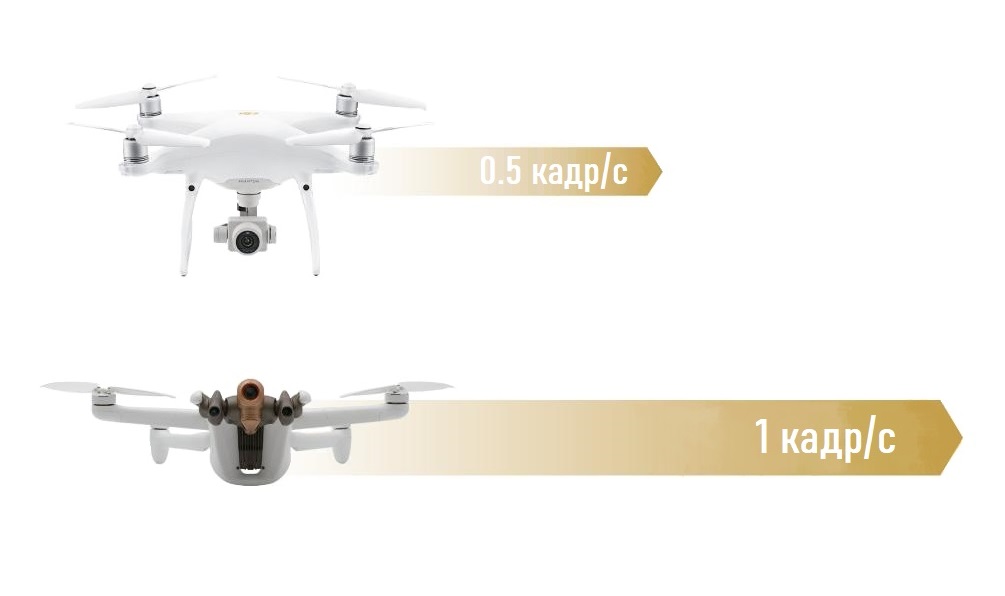
- 48MP pozwala dronowi latać ponad 1,5 raza wyżej niż drony z 1-calowymi czujnikami 20MP, jednocześnie osiągając ten sam GSD. Innymi słowy, wyższa wysokość i szybsza misja idą w parze.
- 1 kl./s: ANAFI Ai strzela dwa razy szybciej niż Autel EVO 2 i DJI Phantom 4 Pro V2.0.
Transfer 4G w locie do PIX4Dcloud
W procesie tworzenia modelu cyfrowego ze zdjęć lotniczych drona, przesyłania plików i obróbki zdjęcia to dwa czasochłonne zadania. ANAFI Ai pomaga użytkownikom przyspieszyć ich pracę. W szczególności system drona umożliwia:
- Przesyłanie obrazów do bezpiecznych serwerów bezpośrednio w locie za pomocą połączenia 4G drona.
- Pod koniec lotu natychmiast rozpocznij obliczanie obiektów: ortomozaiki, chmury punktów, modeli elewacji i teksturowanej siatki.
- Łatwe udostępnianie map 2D i modeli 3D wysokiej jakości ankiet pracownikom i klientom.
![]()
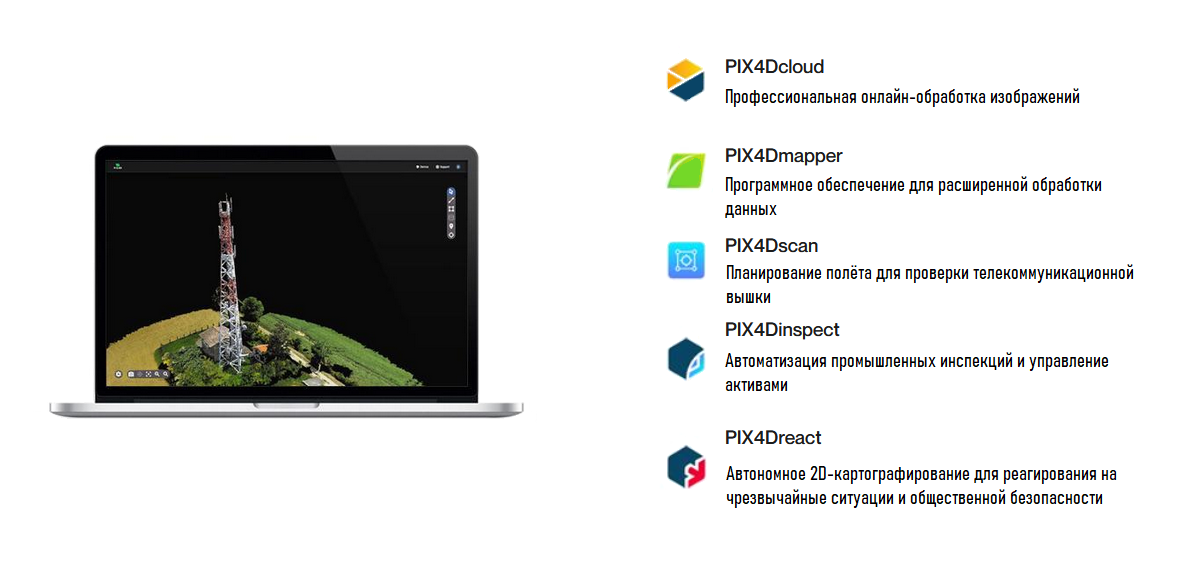
Zgodność z pakietem PIX4D
ANAFI Ai jest teraz w pełni kompatybilny z unikalnym pakietem aplikacji fotogrametrycznych na urządzenia mobilne, komputery stacjonarne i w chmurze, składający się z:
Fotogrametria lub lidar
Dlaczego fotogrametria do ankiety i ankiety? Oprócz dostępności i łatwości użytkowania fotogrametria lotnicza jest najlepszym wyborem, gdy wymagana jest wizualna interpretacja danych.
Specjaliści fotogrametrii
- Zapewnia wiele wizualizacji: ortomozaika, kolorowa chmura punktów, teksturowana siatka.
- Tworzy chmurę punktów o większej gęstości, z których każdy zawiera znaczną ilość informacji (wysokość, tekstura, kolor).
- Przewyższa LIDAR w dokładności fotorealistycznych renderów 2D i 3D - LIDAR nie zapewnia wysokiego poziomu szczegółowości kontekstowej.
Wady LIDAR
- Kosztuje 100 razy więcej niż UAV z matrycą RGB.
- Złożoność przetwarzania danych i możliwe błędy interpretacji.
- Dodanie informacji o kolorze jest możliwe, ale komplikuje proces.
- LIDAR generuje tylko chmurę punktów i jest przeznaczony do konkretnych przypadków i sytuacji.
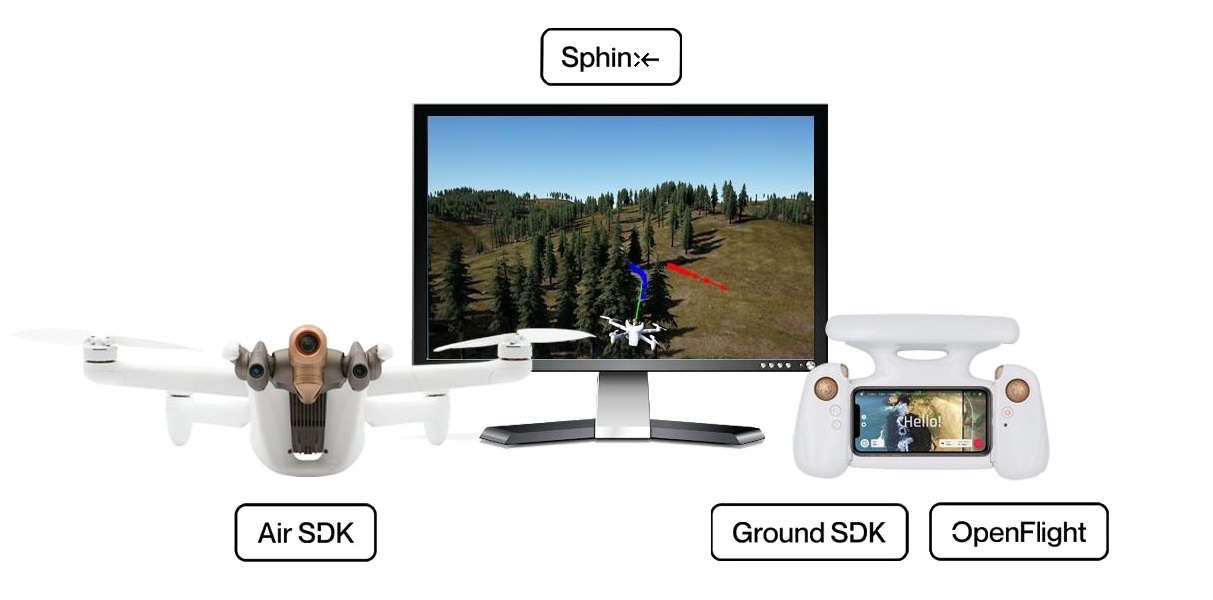
SDK
Parrot Software Development Kit to zestaw narzędzi i oprogramowania typu open source dla programistów. Od czasu powstania pierwszego drona A. R. Drone, oprogramowanie open source firmy, stanowi podstawę platform i narzędzi programistycznych, a Parrot
Deweloper wyjaśnia, że wszystkie zasoby SDK firmy są dostępne bezpłatnie, bez rejestracji i śledzenia, na portalu " Parrot Portal deweloperski"... Możesz także dołączyć do tysięcy programistów na forum Parrot, gdzie możesz dyskutować na aktualne tematy bezpośrednio z inżynierami firmy.
Air SDK
Uruchom swój kod na ANAFI Ai
Air SDK zapewnia rewolucyjną architekturę technologiczną do pobierania i uruchamiania kodu bezpośrednio w ANAFI Ai. Programiści mogą programować specjalnie zaprojektowane misje lotnicze z dostępem do wszystkich czujników dronów, interfejsów połączeń i funkcji autopilota.
Air SDK zapewnia dostęp do:
- Wszystkich czujników (IMU, GPS, TOF) i trybów lotu
- Strumień wideo i metadane ze wszystkimi kamerami
- Interfejsy komunikacyjne Wi-Fi, 4G, USB
- Mapy głębokości i siatki wypełniające
- Tworzenie trajektorii omijania przeszkód
Każdy programista może:
- Zmienić stan drona, tworząc misje lotnicze
- Zmienić tryb nawigacji
- Dodać wbudowane procesy Linuksa (dla na przykład przesyłaj dane przez kanał 4G lub korzystaj z wizji komputerowej)
Air SDK obsługuje język programowania C lub Python. Zestaw Air SDK zawiera szczegółową instrukcję instalacji i dokumentację API. Wiele przykładów zastosowań ilustruje wszystkie możliwości, jakie daje jego unikalna architektura.
Ground SDK
Stwórz potężną aplikację mobilną
Ground SDK to platforma oprogramowania naziemnej stacji kontroli (GCS) na urządzenia mobilne (obsługiwane są zarówno iOS, jak i Android). Pozwala każdemu programiście stworzyć aplikację mobilną dla ANAFI Ai do późniejszego sterowania dronem bezpośrednio z urządzenia mobilnego. Wszystkie funkcje BVS (sterowanie, wideo, ustawienia) są dostępne za pośrednictwem łatwego w użyciu iw pełni udokumentowanego interfejsu API.
OpenFlight
Naziemna stacja kontroli typu Open Source
Po raz pierwszy Parrot otwiera kod źródłowy aplikacji naziemnej stacji kontroli. OpenFlight to rdzeń naszej słynnej aplikacji FreeFlight 7 o otwartym kodzie źródłowym. Pozwala to programiście skupić się na dodawaniu własnych funkcji i natychmiast mieć profesjonalnie wyglądającą aplikację gotową do opublikowania w AppStore.

OpenFlight zawiera:
- Wszystkie UX FreeFlight 7
- Wszystkie ustawienia interfejsu
- Kod do wizualizacji 3D przeszkód w czasie rzeczywistym
- Kod do zarządzania komunikacją 4G
- OpenFlight jest publikowany na licencji BSD-3 z kompletnym przewodnikiem instalacji i obszerną dokumentacją.
Sphinx
3D Photorealistic Simulation
Parrot Sphinx to zaawansowane narzędzie do symulacji dronów. Inżynierowie Parrot używają go do opracowywania i testowania wszystkich funkcji ANAFI Ai. Ogólną koncepcją jest symulacja rzeczywistego oprogramowania drona ze wszystkimi jego czujnikami w realistycznym wizualnie i fizycznie środowisku.

Parrot Sphinx pozwala:
- Symulować wszystkie kamery i czujniki
- Symulować mapy głębi i segmentację obrazy
- Nawiguj w wielu realistycznych scenach 3D
- Podłącz do różnych typów pilotów
- Użyj skryptów do sterowania symulacją
- Dodaj pieszych i pojazdy
- Wizualizuj i rejestruj dane lotu
- Dostosuj czujniki samolotu i otaczające elementy fizyczne
- Kontroluj współczynnik czasu rzeczywistego
Parrot Sphinx jest zbudowany w oparciu o zaawansowany standard komponenty:
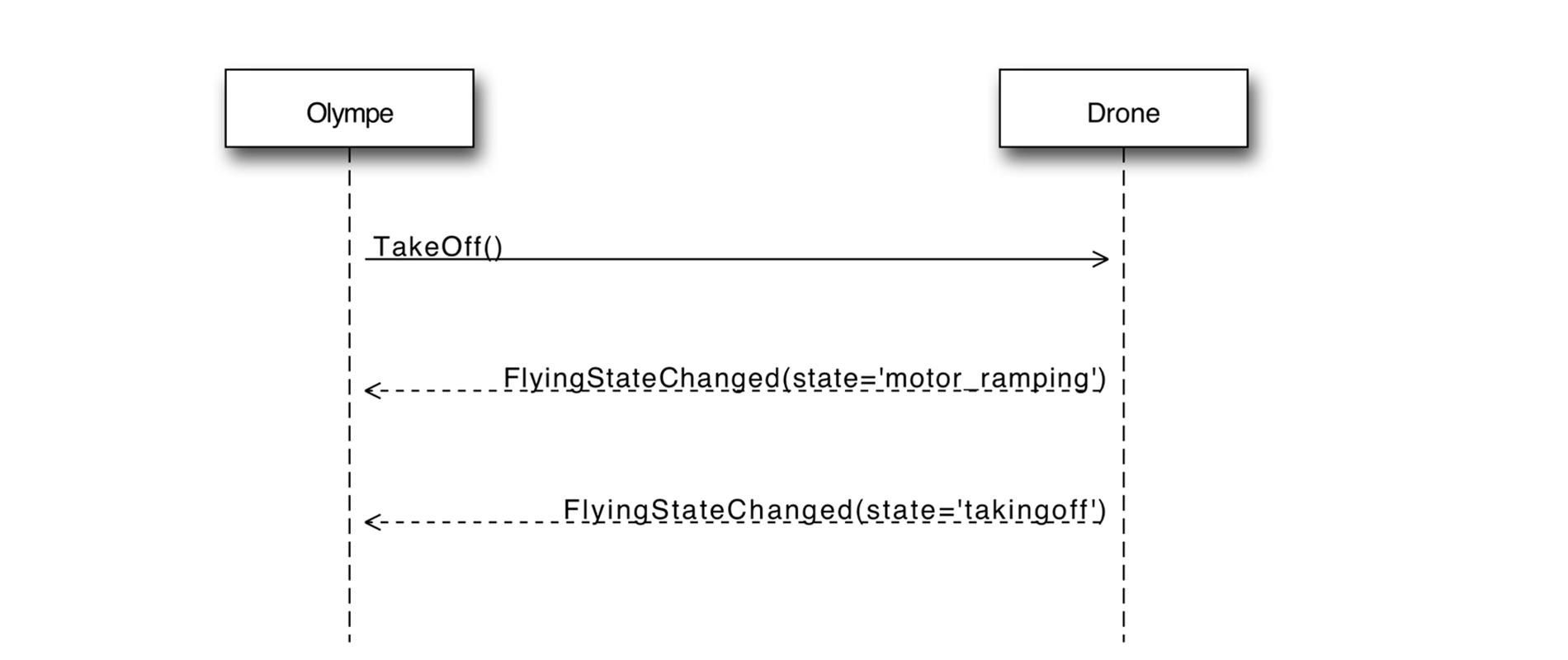
Olympe
Python do sterowania ANAFI Ai
Olympe zapewnia interfejs programowania kontrolera Python dla ANAFI AI. Pierwotnym celem Olympe była interakcja ze środowiskiem modelowania Sphinx. Olympe może również kontrolować fizyczne ANAFI Ai ze zdalnego komputera.
Platforma Olympe umożliwia:
- Połączenie z symulowanym lub fizycznym ANAFI Ai
- Wysyłanie komunikatów poleceń (pilotowanie, orientacja kamery, Powrót do domu, Plan lotu)
- Rozpoczęcie i zatrzymanie przesyłania strumieniowego wideo ze wszystkich kamer
- Nagrywanie strumienia wideo i zsynchronizowane metadane
PdrAW
Zaawansowany odtwarzacz multimedialny
PDrAW to zaawansowana przeglądarka wideo dla mediów ANAFI Ai. Przeglądarka obsługuje zarówno strumieniowe (RTP / RTSP), jak i nagrane (MP4) wideo na platformach Linux, macOS, Android i iOS. PDrAW jest dostępny jako biblioteka (libpdraw), biblioteka opakowująca (libpdraw-backend) i samodzielny plik wykonywalny (pdraw).
PDrAW zarządza również metadanymi wideo. W ANAFI Ai zarówno przesyłane strumieniowo, jak i nagrane wideo zawierają metadane, które są publicznie dostępne i udokumentowane, co pozwala na zaawansowane przetwarzanie wideo z powietrza.
Modele C. A. D.
Parrot dostarcza modele 3D swoich dronów do integracji z Twoim projektem CAD w celu szybkiego prototypowania i integracji akcesoriów.
Kompatybilność z MAVLink i GUTMA
ANAFI Ai jest kompatybilny ze standardowym protokołem open source MAVLink v1, który umożliwia wymianę danych w czasie rzeczywistym między UAV a stacją sterowania. ANAFI Ai można sterować ręcznie lub za pomocą automatycznego planowania lotu ze stacji bazowej kompatybilnej z MAVLink, takiej jak QGroundControl.
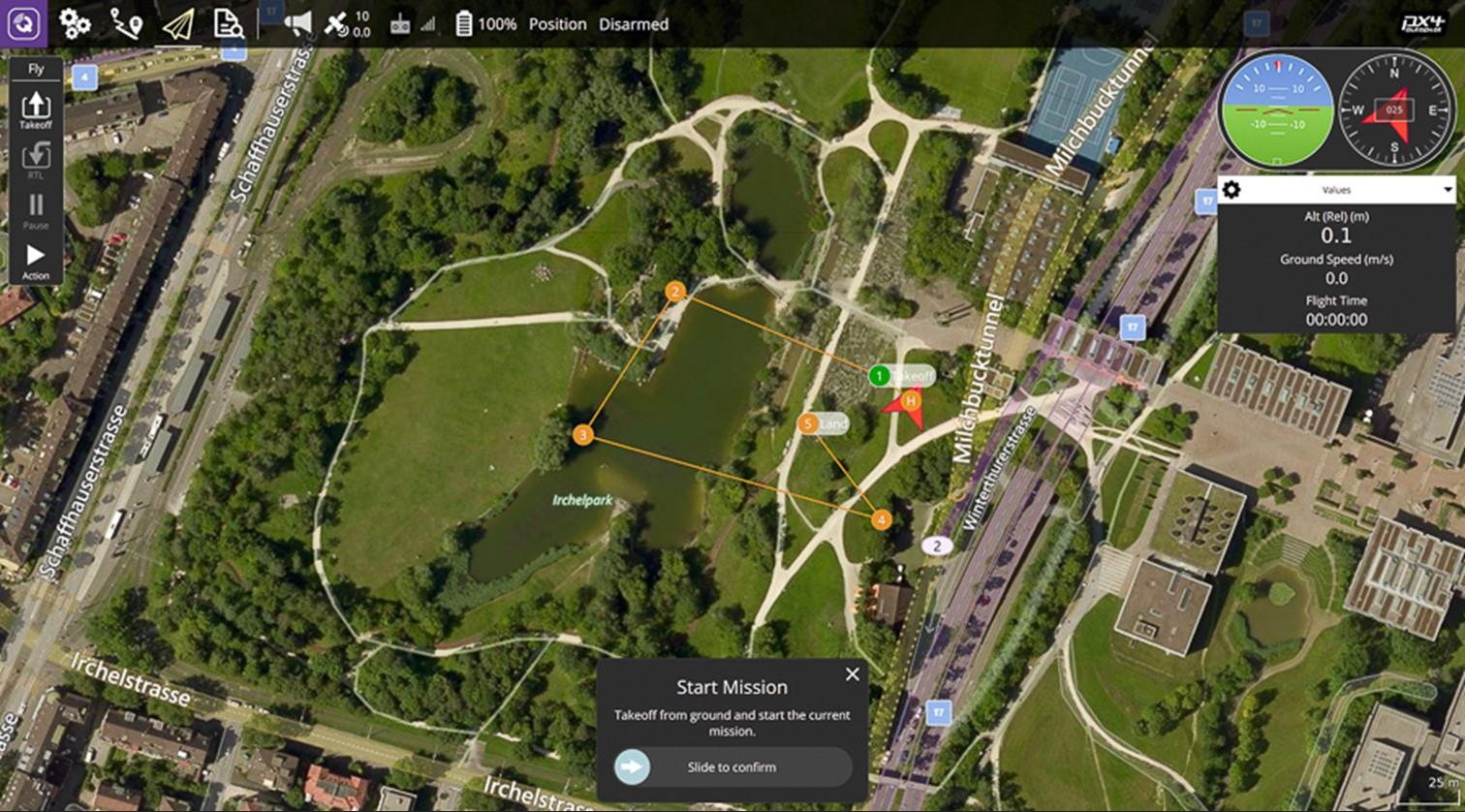
* Interfejs QGroundControl
ANAFI Ai jest kompatybilny ze standardowym protokołem danych lotu GUTMA open source. Globalne Stowarzyszenie UTM to konsorcjum głównych graczy w dziedzinie kontroli ruchu lotniczego.

Największy ekosystem partnerski dla dronów Parrot
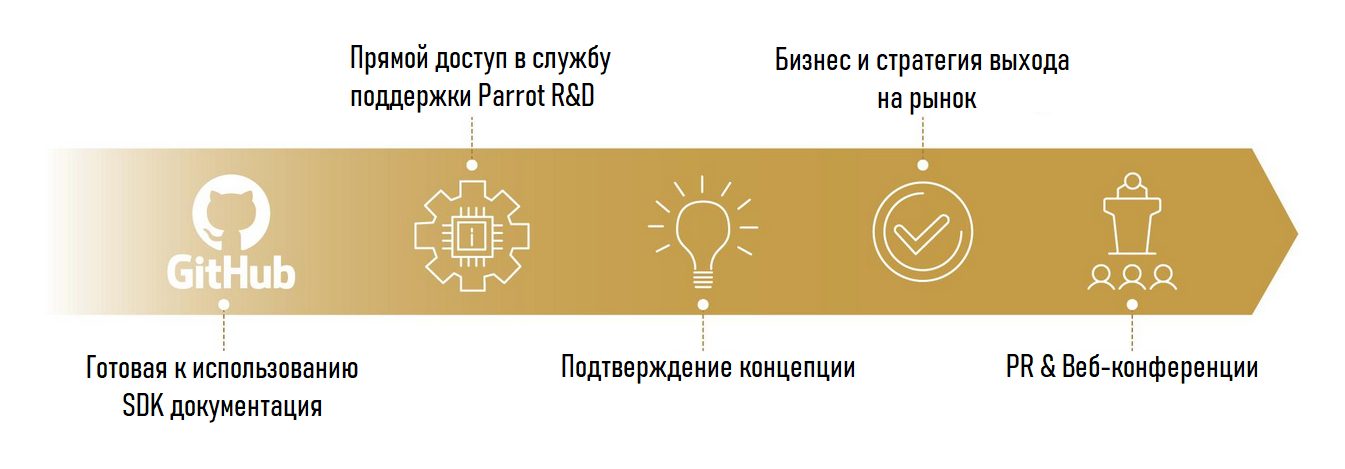
Parrot kontynuuje rozwój globalnego ekosystemu dostawców oprogramowania dla dronów poprzez swój partnerski program SDK oferowanie specjalistycznych i unikalnych rozwiązań dla rosnących i ewoluujących potrzeb profesjonalnych użytkowników.
Parrot dla każdej potrzeby biznesowej
Aby jak najlepiej wykorzystać proces inspekcji, Parrot oferuje swoim klientom ekosystem kompatybilnego oprogramowania dronów, od zarządzania flotą po loty kompilacyjne planowanie i import dzienników lotów, przed strzelaniem, mapowanie, monitorowanie i analizowanie otrzymanych danych.
PIX4D × Parrot
Aplikacje do modelowania 2D/3D. Unikalny zestaw aplikacji do fotogrametrii mobilnej, desktopowej i chmurowej.
Verizon x Skyward x Parrot
Rozwiązanie drona 4G LTE w Stanach Zjednoczonych. Pierwszy tego rodzaju dron robotyczny ANAFI Ai podłączony do sieci Verizon 4G LTE z preinstalowanym oprogramowaniem Skyward. Otwiera drzwi do przesyłania danych w czasie zbliżonym do rzeczywistego, zdalnych wdrożeń i lotów poza zasięgiem wzroku.

Skyward × Parrot
Integracja i uczenie się w ramach zdolności ANAFI. Platforma zarządzania lotnictwem, obejmująca przestrzeń powietrzną, dostęp do LAANC oraz szkolenia, sprzęt i łączność na potrzeby wdrażania floty dronów w przedsiębiorstwie.

DroneSense × Parrot
Buduj, zarządzaj i skaluj swoje programy dronów. Specjaliści w zakresie bezzałogowych statków powietrznych w sektorze bezpieczeństwa publicznego mogą korzystać z pełnego zestawu funkcji DroneSense, specjalnie zaprojektowanych na potrzeby ratowników.

Parrot Ecosystem Partners

Parrot Affiliate Program
Deweloper proponuje rozszerzenie możliwości swój program dla dronów poprzez zintegrowanie ich SDK.
Cyberbezpieczeństwo
Poufność danych
Deweloper zauważa, że nie gromadzi wszelkie dane bez zgody użytkowników. Decyzja o przeniesieniu danych do infrastruktury Parrot należy wyłącznie do samych użytkowników. Dane hostowane w Parrot umożliwiają użytkownikowi synchronizację danych lotu i planów lotu między różnymi urządzeniami, a także ułatwiają wsparcie i umożliwiają Parrot ulepszanie swoich produktów.
ANAFI Ai jest zgodny z Ogólnym rozporządzeniem o ochronie danych Unii Europejskiej (RODO) i idzie dalej, na przykład umożliwia usunięcie wszystkich danych za pomocą 1 kliknięcia, zapewniając w ten sposób użytkownikom najłatwiejszą kontrolę. Ten problem za jednym kliknięciem został rozwiązany w aplikacji mobilnej FreeFlight7 lub w ustawieniach prywatności konta Parrot. Cloud. Dzięki temu użytkownicy w dowolnym momencie mogą nie tylko zaprzestać wymiany danych, ale także z łatwością zażądać ich usunięcia.
Jeżeli użytkownik wyrazi zgodę na wymianę danych, ich przetwarzanie będzie odbywać się w całkowicie przejrzystym formacie, szczegółowo opisanym w Polityce Prywatności Parrot.
Gdy ANAFI Ai jest podłączony do Skycontroller 4 przez 4G, infrastruktura Parrot jest używana do parowania drona i pilota. Jeśli użytkownik nie jest zalogowany na koncie Parrot. Cloud, nadal może korzystać z połączenia 4G z unikalnym kontem tymczasowym. Podczas korzystania z infrastruktury Parrot do parowania 4G, wideo jest szyfrowane za pomocą klucza uzgodnionego między dronem a pilotem, Parrot nie ma dostępu do niezaszyfrowanego wideo.

Zgodny z FIPS140-2 i CC EAL5 Secure Element
ANAFI Ai ma wbudowany element zabezpieczający Wisekey, który jest zgodny z NIST Certyfikat FIPS140-2 Level 3 i Common Criteria EAL5. Podobny element zabezpieczający jest również wbudowany w sprzęt sterujący Skycontroller 4.
Funkcje elementu zabezpieczającego:
- Wykonuje operacje kryptograficzne
- Przechowuje i chroni informacje poufne
Wykorzystuje prywatny klucz ECDSA z parametrami domeny P521, unikalnymi dla każdego drona. Nie można go wyjąć z elementu zabezpieczającego. Certyfikat powiązany z tym kluczem jest podpisany przez urząd certyfikacji.
Wisekey chroni integralność oprogramowania układowego, zapewnia unikalną identyfikację drona dla parowania 4G i silnego uwierzytelniania oraz unikalny podpis cyfrowy zdjęć zrobionych przez drona.

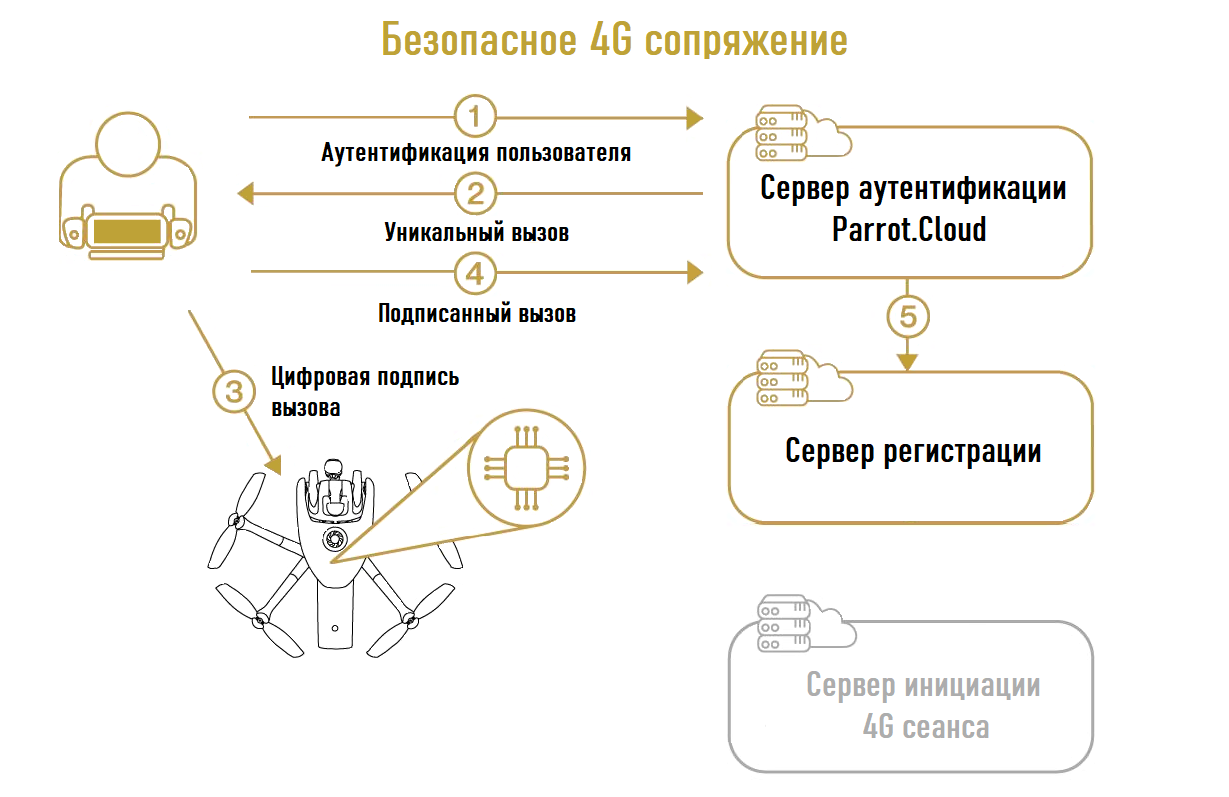
Bezpieczne połączenie 4G i silne uwierzytelnianie
proces bezpiecznego parowania urządzeń. Podczas tego procesu użytkownik rzetelnie potwierdza, że jest podłączony do konkretnego drona. Dzięki ANAFI Ai Secure Element może to zrobić bez wpisywania hasła wewnątrz drona.
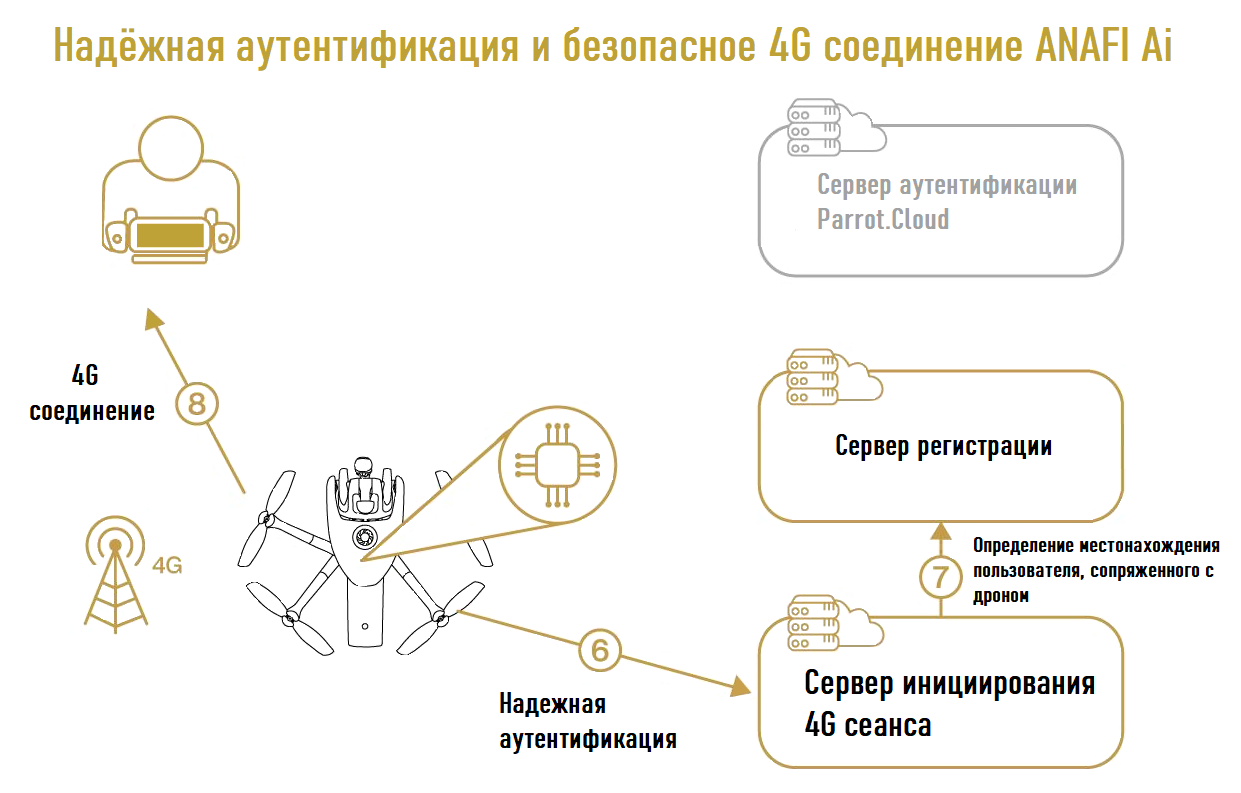
Serwery Parrot następnie rejestrują komunikację między użytkownikiem a dronem. Gdy połączenie Wi-Fi między użytkownikiem a dronem zostanie utracone, ANAFI Ai automatycznie przełączy się na połączenie 4G. ANAFI Ai przeprowadza silne uwierzytelnianie na serwerach Parrot przy użyciu prywatnego klucza przechowywanego na Secure Element. Serwery Parrot szukają podłączonych użytkowników i zapewniają interfejs między ANAFI Ai i Skycontroller 4.
Aby chronić sterowanie dronem i strumienie wideo przychodzące do Skycontroller 4, ANAFI Ai obsługuje protokoły TLS, DTLS i SRTP.
Bezpieczna inicjalizacja i aktualizacja
Sekwencja rozruchu samolotu jest chroniona: system sprawdza że używa oprogramowania Parrot i że to oprogramowanie nie zostało naruszone. Przy każdej inicjalizacji przeprowadzana jest kontrola bezpieczeństwa. Usługa aktualizacji kontroluje również podpis cyfrowy aktualizacji oprogramowania.
Konfigurowanie kluczy użytkownika na Secure Element
Użytkownicy ANAFI Ai mają dostęp do specjalnego konta operatora Secure Element. To konto służy do konfigurowania kluczy, które są istotne dla tego użytkownika. Użytkownicy mogą skonfigurować Secure Element za pomocą kluczy publicznych dostawców misji, którym ufają. ANAFI Ai będzie wykonywać tylko misje, które są podpisane tymi kluczami. Ten proces uniemożliwia atakującym wykonywanie złośliwych misji lotniczych na dronie.
Zdjęcia z podpisem cyfrowym
Secure Element firmy ANAFI Ai może cyfrowo podpisywać obrazy drona. Podpis ten jest dowodem na to, że:
- Podpisane zdjęcie zostało wykonane przez wskazany bezzałogowy statek powietrzny.
- Ani sam obraz, ani jego metadane nie zostały przetworzone (dobrowolnie lub nie) – metadane, znane również jako EXIF i XMP, zawierają informacje o dacie, godzinie i lokalizacji obrazu.

Innymi słowy, podpis cyfrowy chroni wszystkie dane związane z obrazem, w tym miejsce i czas jego wykonania oraz to, który dron ANAFI Ai.
Użytkownicy, a także partnerzy oferujący rozwiązania programowe wykorzystujące fotografię dronową, mogą zweryfikować podpis cyfrowy zdjęć ANAFI Ai za pomocą certyfikatu drona lub poprzez katalog kluczy publicznych dostarczony przez Parrot.
Przejrzystość i ciągłe kontrole bezpieczeństwa z Bug bounty
Parrot używa standardowych protokołów i formatów plików, gdy tylko jest to możliwe. Nie ma zaciemnionego kodu ani ukrytych funkcji. Pozwala to użytkownikowi zrozumieć, jak działają produkty Parrot i przetestować ich bezpieczeństwo. Ponadto OpenFlight, oprogramowanie służące do sterowania dronem, jest oprogramowaniem typu open source, co daje użytkownikom pełną kontrolę.
W kwietniu 2021 r. Parrot uruchomił program Bug Bounty z YesWeHack, pierwszą europejską platformą bezpieczeństwa crowdsourcingową. Dzięki temu partnerstwu Parrot wykorzystuje ogromną społeczność badaczy cyberbezpieczeństwa YesWeHack do identyfikowania potencjalnych luk w dronach, aplikacjach mobilnych i usługach internetowych.
Program Bug Bounty składa się z dwóch faz:
Programy prywatne początkowo zapewniają wyłączny dostęp wybranym badaczom bezpieczeństwa i obejmują przyszłe modele dronów Parrot. Doświadczenie i różnorodne umiejętności badaczy potwierdzą wysoki poziom bezpieczeństwa produktów przed ich wprowadzeniem na rynek, co przyczyni się do poprawy bezpieczeństwa użytkowników Parrot i ochrony ich danych.
Po pierwszej rundzie prywatnego programu Bug Bounty i po komercjalizacji produkty trafiają do programu publicznego. Ich bezpieczeństwo jest następnie rygorystycznie sprawdzane przez całą społeczność YesWeHack złożoną z ponad 22 000 badaczy cyberbezpieczeństwa.

Zarządzanie danymi
Parrot Cloud pozwala użytkownikom, którzy zdecydują się na udostępnianie swoich danych, zarządzać danymi lotu i floty, a także multimediami dane otrzymane przez ich drony.
Zebrane dane
Parrot Cloud zbiera 4 rodzaje danych:
Statyczne (dane produktu):
- Samolot numer seryjny
- Numer seryjny akumulatora
- Wersja oprogramowania sprzętowego drona i akumulatora
- Wersja osprzętu drona i akumulatora
- Model urządzenia
- Wersja FreeFlight 7 Wersja
Zdarzenia
- Alarmy: Akumulator, Autopilot, Czujniki
- Komunikacja: podłącz / odłącz, rozpoczęcie strumieniowania, alarm zakłóceń, słaby sygnał
- Kamera: statystyki strumieniowania, zmiany ustawień
- Lot: zmiana stanu (start, lądowanie, zawis itp.), aktywacja zadania lotu (plan lotu, fotogrametria)
„Obrazy kontekstowe”
- Timelapse – migawka oraz (raz na 2 minuty)
- Deep Learning (mapowanie większej liczby obiektów, krajobrazów w celu poprawy autonomii lotu, śledzenie, unikanie przeszkód)
- Stereowizja (mapa głębi)
- Obrazy wyzwalane wg zdarzenia
- Początek i koniec precyzyjnych instrukcji zawisu, precyzyjne lądowanie
- Awaria drona
- Twarze są automatycznie zamazane podczas transmisji
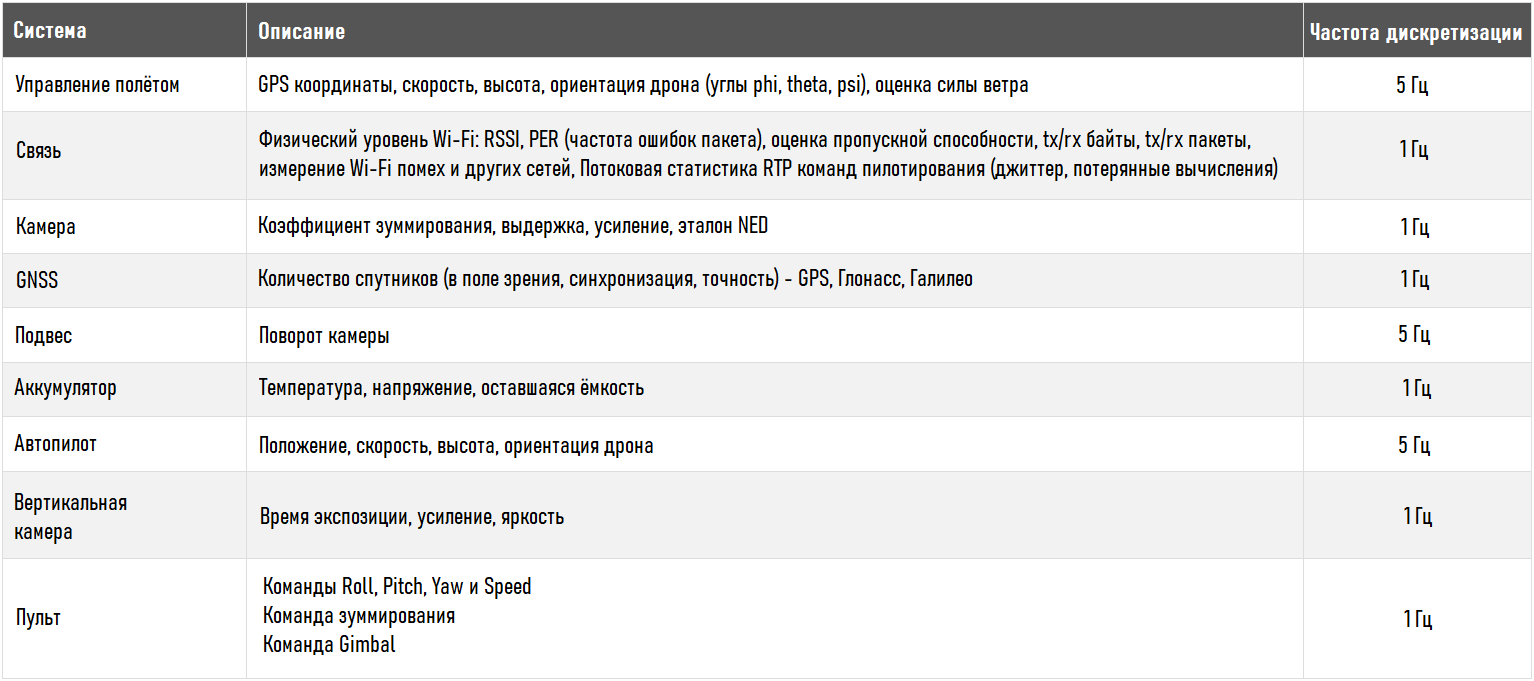
Telemetria
Ostateczne wykorzystanie zebranych danych
Parrot zbiera i wykorzystuje wyłącznie dane od klientów, którzy wyrazili zgodę na ich udostępnienie w celu poprawy jakości swoich produktów...
Zarządzanie utrzymaniem
Konserwacja zapobiegawcza: Nasze narzędzia zbierają wszystkie informacje związane z misjami (rodzaj misji, czas startu i lądowania, liczba misji, lokalizacja drona, prędkość lotu, plan lotu i ustawienia AirSDK). Pozwala to na otrzymywanie dokładnych informacji o stanie floty dronów ANAFI Ai (a także ich kontrolerów i baterii) w czasie rzeczywistym.
Konserwacja naprawcza: Zebrane informacje są przydatne do szybkiego określenia stanu konkretnego drona lub akumulatora.
Wzmacnianie sztucznej inteligencji (AI)
Elementy AI ANAFI Ai (PeleeNet, sieci konwolucyjne itp.) oferują użytkownikom niezrównane usługi i funkcje: unikanie przeszkód, śledzenie celu, kilka trybów lotu. Jakość sztucznej inteligencji zależy od ilości i jakości zebranych danych (obrazów i filmów): te dane zasilają uczenie maszynowe. Pod tym względem jakość danych nie jest jedynym decydującym elementem: metadane związane z tymi danymi są również fundamentalne. Z tego powodu nasze narzędzie regularnie i w zależności od zdarzeń zbiera obrazy i metadane, łącznie od 30 do 50 MB na minutę.
Charakterystyki lotu
Charakterystyki aerodynamiczne
Napędy i aerodynamika
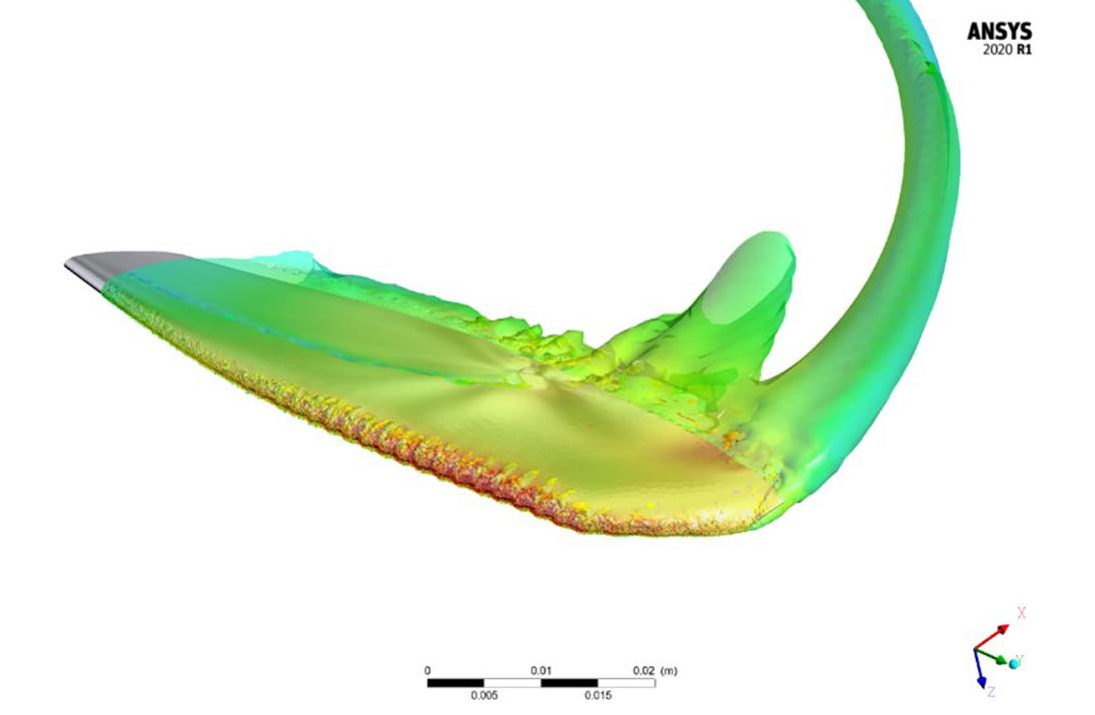 Obraz CFD łopat śmigieł ANAFI Ai
Obraz CFD łopat śmigieł ANAFI Ai
Nowe łopaty śmigła biomimikry z wielorybami przypominającymi garb. Takie podejście umożliwiło zwiększenie sprawności napędowej elektrowni, która na wyjściu zapewniała wzrost ciągu przy tej samej prędkości obrotowej. Efekt ten jest porównywalny ze wzrostem średnicy wirnika.
Hałas akustyczny, zwłaszcza tonalny, emanujący z krawędzi natarcia jest również zmniejszony. Dlatego ANAFI Ai jest cichszy [71,5 dB SPL (A) z 1 m] niż Skydio 2 [76,4 dB SPL (A) z 1 m].
- Czas lotu powyżej 32 minut
- Dzięki zoptymalizowanym właściwościom aerodynamicznym kadłuba i układu napędowego ANAFI Ai maksymalna prędkość w locie do przodu wynosi 61 km/h, przy lot boczny i lot do tyłu 58 km/h
- Maks. odporność na wiatr 12,7 m/s.
- Dzięki wysokiej wydajności momentu obrotowego silnika/śmigła i dużej autonomii akumulatora zasięg wynosi 22,5 km (przy stałej prędkości 50 km/h przy bezwietrznej pogodzie).
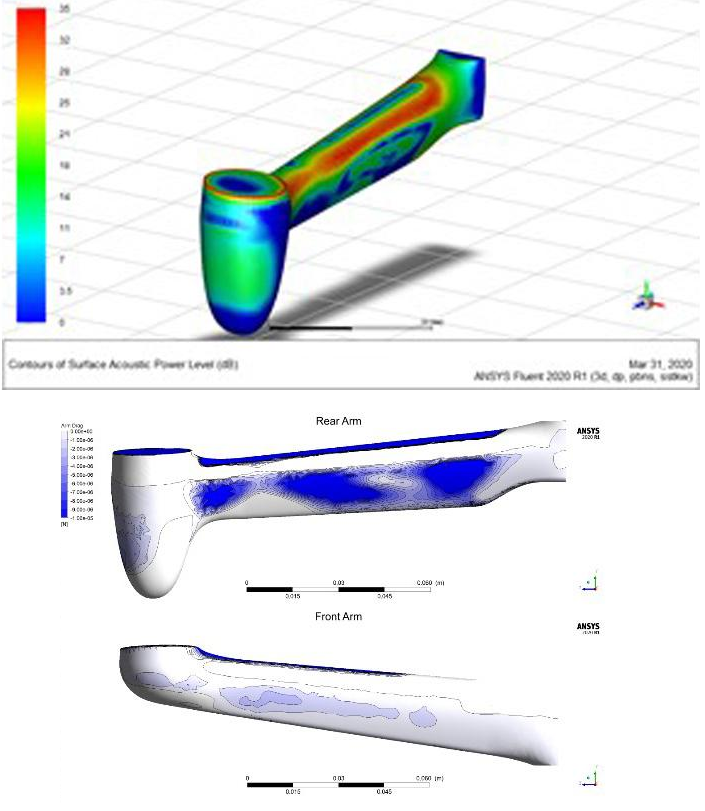 Obrazy CFD wiązek ANAFI Ai
Obrazy CFD wiązek ANAFI Ai
Czujniki
W celu zapewnienia bezpiecznego lotu ANAFI Ai jest wyposażony w:
- 2 × IMU (ICM-40609-D i ICM42605)
- Magnetometr LIS2MDL
- Moduł GPS UBX-M8030
- TI OPT3101 time-of-flight (ToF)
- Barometr LPS22HB
- Kamera pionowa
Charakterystyka czujnika
)Lot IMU: ICM-40609-D
- 3-osiowy żyroskop
- Zakres: ± 2000 ° / s
- Rozdzielczość: 16,4 LSB / ° / s
- Przesunięcie / Dokładność: ± 0,05 ° / s (po kalibracji termicznej i dynamicznej)
- Akcelerometr 3-osiowy
- Zakres: ± 16g
- Rozdzielczość: 2,048 LSB / mg
- Przesunięcie / dokładność: ± 0,5 mg (XY) ± 1 mg (Z) (po kalibracji termicznej i dynamicznej)
- Kontrola temperatury s: system ogrzewania kontrolowany w stosunku do temperatury otoczenia, stabilizowany w zakresie: ± 0,15°C
- Częstotliwość pomiaru: 2 kHz
Magnetometr: LIS2MDL
- Zakres: ± 49,152G
- Rozdzielczość: 1,5 mG
- Przesunięcie / Dokładność: ± 15 mG (po kompensacji, przy maksymalnej prędkości silnika)
- Częstotliwość pomiaru: 100 Hz
Barometr: LPS22HB 1
- Zakres: 260 do 1260 hPa
- Rozdzielczość: 0,0002 hPa
- Przesunięcie/dokładność: ± 0,1 hPa
- Regulacja temperatury: system ogrzewania kontrolowany w stosunku do temperatury otoczenia, stabilizowany w zakresie: ± 0,2°C
- Częstotliwość pomiaru: 75 Hz
- Szum pomiaru: 20 cm RMS
GNSS: UBX-M8030 1
- Antena ceramiczna 25 × 25 × 4 mm, pozwala na poprawę wzmocnienia o 2 dB w stosunku do ANAFI 1
- Czułość: zimny start -148 dBm / śledzenie i nawigacja: -167 dBm
- Czas do pierwszej naprawy: 40 sekund
- Dokładność / Dokładność: Pozycja (odchylenie standardowe 1,4 m), Prędkość (odchylenie standardowe 0,5 m/s)
Kamera pionowa
- Czujnik obrazu format: 1/6 cala
- Rozdzielczość: 640 × 480 pikseli
- Przetwornik obrazu z globalną migawką
- Czarno-biały
- FOV: Kąt widzenia w poziomie: 53,7 ° / pionowy kąt widzenia: 41,5°
- Ogniskowa: 2,8 mm
- Pomiar prędkości przepływu optycznego na podłożu przy 60 Hz
- 15 Hz i precyzyjne dopasowanie @ 5Hz
ToF: TI OPT3101
- Zasięg: 0-15m
- Rozdzielczość: 0,3 mm
- Precyzja b: ± 2 cm (po kalibracji)
- Częstotliwość pomiaru: 64 Hz
Kamera pionowa IMU: ICM-42605
- ) Żyroskop 3-osiowy
- Zakres: ± 2000 ° / s
- Rozdzielczość: 16,4 LSB / ° / s
- Offset / dokładność: ± 0,1 ° / s (po dynamice Kalibracja)
- 3-osiowy akcelerometr
- Zakres: ± 16g
- Rozdzielczość: 2.048 LSB / mg
- Przesunięcie / Dokładność: ± 2.0 mg (XY) ± 5,0 mg (Z) - po kalibracji dynamicznej
- Częstotliwość pomiaru: 1 kHz
- Synchronizacja sprzętowa z kamerą pionową, dokładność: 1 μs
Autopilot
Kontroler lotu ANAFI Ai zapewnia proste i intuicyjne pilotowanie: nie jest wymagane żadne szkolenie, aby go obsługiwać. Pozwala zautomatyzować wiele trybów lotu (Plan lotu, Kamerzysta, Start ręczny, Smart RTH). Algorytmy łączenia czujników łączą dane ze wszystkich czujników w celu oszacowania współczynnika ANAFI Ai, wysokości, pozycji i prędkości.
Ocena stanu jest niezbędna do prawidłowego funkcjonowania dronów. Quadkoptery są z natury niestabilne, gdy kontroler lotu jest używany z otwartą pętlą; aby łatwo nimi sterować, nie mówiąc już o sterowaniu autonomicznym, konieczne jest ich ustabilizowanie za pomocą algorytmów sterowania w pętli zamkniętej. Algorytmy te obliczają i wysyłają polecenia do silników wymaganych przez ANAFI Ai, aby osiągnąć pożądane trajektorie.

Lot w pomieszczeniach
W przypadku braku sygnału GPS, ANAFI Ai opiera się głównie na pionowych pomiarach kamer w celu oszacowania prędkości i pozycji. Wydajność kamery pionowej jest określana przez dwa główne algorytmy:
- Przepływ optyczny do oszacowania prędkości
- Wykrywanie i dopasowanie punktu kluczowego do oszacowania pozycji
Kamera pionowa algorytmy mogą pracować w warunkach słabego oświetlenia dzięki ANAFI Ai wyposażonej w parę diod LED umieszczonych obok pionowej kamery. Pozwalają dronowi zachować stabilność, zwłaszcza podczas lotu w pomieszczeniach lub w przypadku braku GPS, na wysokości poniżej 5m nad ziemią. Moc diod LED dostosowuje się automatycznie, w zależności od potrzeb algorytmu.
Lot autonomiczny
Najważniejsze cechy
- Obrotowy system czujnikowy o szerokim polu widzenia
- Ekstrakcja głębokości otaczającej przestrzeni na podstawie wyrównania stereo i głębokości przez ruch
- Reprezentacja otoczenia w postaci siatki wypełnienia
- Autonomiczne wykrywanie i omijanie przeszkód przy prędkość do 29 km/h
W tym rozdziale szczegółowo opisano czujniki, sprzęt i algorytmy wykorzystywane przez ANAFI Ai w celu umożliwienia autonomicznego lotu. Jest zorganizowany w następujący sposób:
- Szczegółowy opis systemu percepcji ANAFI Ai
- Algorytmy percepcyjne wykorzystywane do rekonstrukcji środowiska 3D otaczającego drony
- Zmiana harmonogramu i przeszkody unikanie

Strategia systemu percepcji
Percepcja trójwymiarowego środowiska jest kluczową umiejętnością osiągnięcia autonomicznego lotu, zwłaszcza w pomieszczeniach zamkniętych. Jest to warunek konieczny do gwarantowanego wykrywania i omijania przeszkód, co zmniejsza obciążenie operatora drona, zwiększa sukces misji i zapewnia bezpieczeństwo samolotu.
Uwolnienie pełnego potencjału latającej kamery, która może swobodnie poruszać się i obracać we wszystkich kierunkach bez ograniczeń, wymaga skutecznego rozwiązania wykrywania. W szczególności system czujnikowy powinien być w stanie odbierać informacje o otoczeniu w kierunkach, które odpowiadają ruchowi do przodu w locie – niezależnie od orientacji kamery.
ANAFI Ai opiera się na unikalnym rozwiązaniu technicznym opartym na dwóch mechanicznych przegubach, aby oddzielić orientację głównej kamery od systemu wykrywania:
- Główna kamera jest zamontowana na 3- gimbal osi, dzięki czemu orientacja 3D jest niezależna od orientacji drona.
- System czujników zamontowany jest na jednoosiowym gimbalu - połączonym z ruchem odchylania drona, może być zorientowany w dowolnym kierunku.
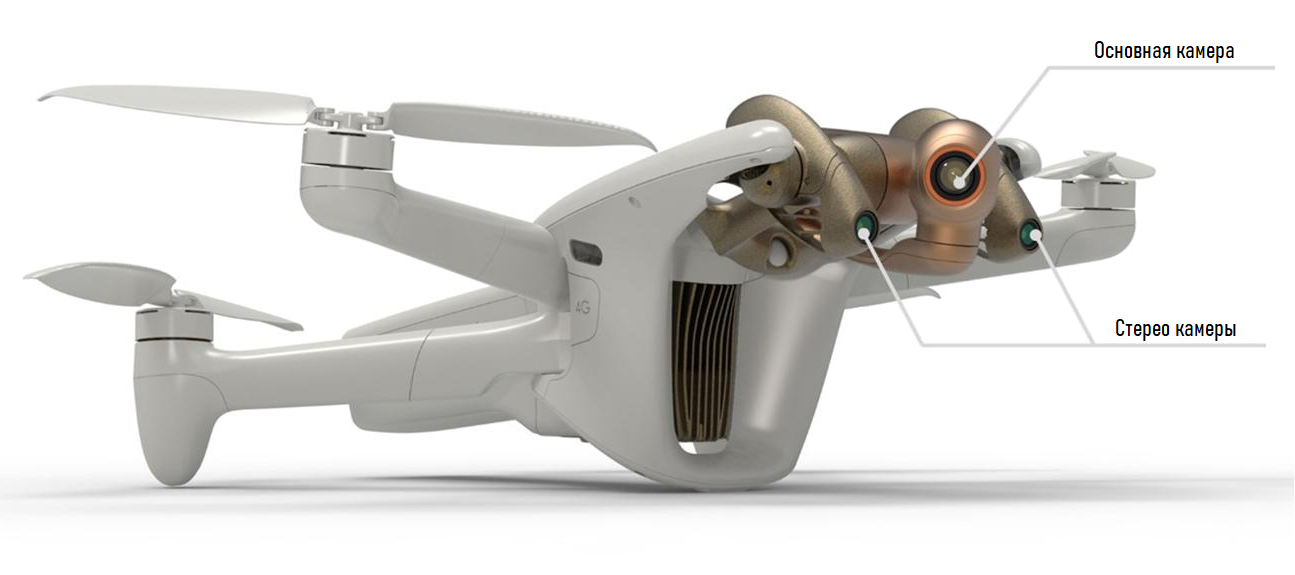 Podwójny stabilizator ANAFI Ai do percepcji i wizualizacji.
Podwójny stabilizator ANAFI Ai do percepcji i wizualizacji.
Osie pochylenia dwóch wieszaków są współliniowe i połączone w celu uzyskania ultrakompaktowej konstrukcji.
Dzięki takiemu rozwiązaniu możliwe jest skierowanie kamery głównej i systemu detekcyjnego w dwóch różnych kierunkach. Taka konstrukcja pozwala uniknąć stosowania drogich kamer po bokach, na górze, na dole i z tyłu drona, jednocześnie zapewniając duże dostępne pole widzenia dla systemu czujnikowego.
Ta sekcja jest zorganizowana w następujący sposób:
- Szczegóły czujników używanych w systemie czujników
- Specyfikacje zarówno dla gimbala kamery głównej, jak i gimbala systemu czujników
- Strategie kierowania systemem czujników do wykorzystania potencjału konstrukcji podwójnego zawieszenia
Czujniki
System czujników jest oparty na parze identycznych kamer z jedną osią skoku...
 Zawias mechaniczny 1-osiowy do systemu czujnikowego ANAFI Ai.
Zawias mechaniczny 1-osiowy do systemu czujnikowego ANAFI Ai.
Dane techniczne czujnika są następujące:
- Model: Onsemi AR0144CSSM28SUD20
- Kolor: Monochromatyczny
- Rozdzielczość: 1280 × 800 pikseli
- Szybkość klatek: 30 kl./s
- Globalna migawka
- Pełne poziome pole widzenia: 118 ° (110 ° wykorzystywane do wykrywania)
- Pełne pionowe pole widzenia: 72° (62° użyte do wykrywania)
- Ogniskowa: 1,47 mm (0,039 cala - 492.94610 pikseli)
- Przysłona: f/2,7
stereopary są następujące:
- Wspólna oś skoku
- Linia bazowa / Odległość: 62 mm (2,44 cala)
- Przechwytywanie synchroniczne przy 30 fps

Podwójny gimbal
Mechaniczny gimbal kamery głównej to 3-osiowy mechaniczny pitch-rol l-yaw” o charakterystyce:
- Pitch Limitery: -116°/176°
- Roll Limitery: / - 36°
- Yaw Limitery: / - 48°
Zawieszenie mechaniczne układu czujnikowego jest zawieszeniem jednoosiowym o następujących charakterystykach:
- Ograniczniki krańcowe w skoku: -107° / 204 °
- Czas podróży od jednego krańca do drugiego: 300 ms
Układ czujnikowy ma skok 311° (z czego 296° nie jest maskowane przez korpus drona), co pozwala na ruch do tyłu postrzeganie.
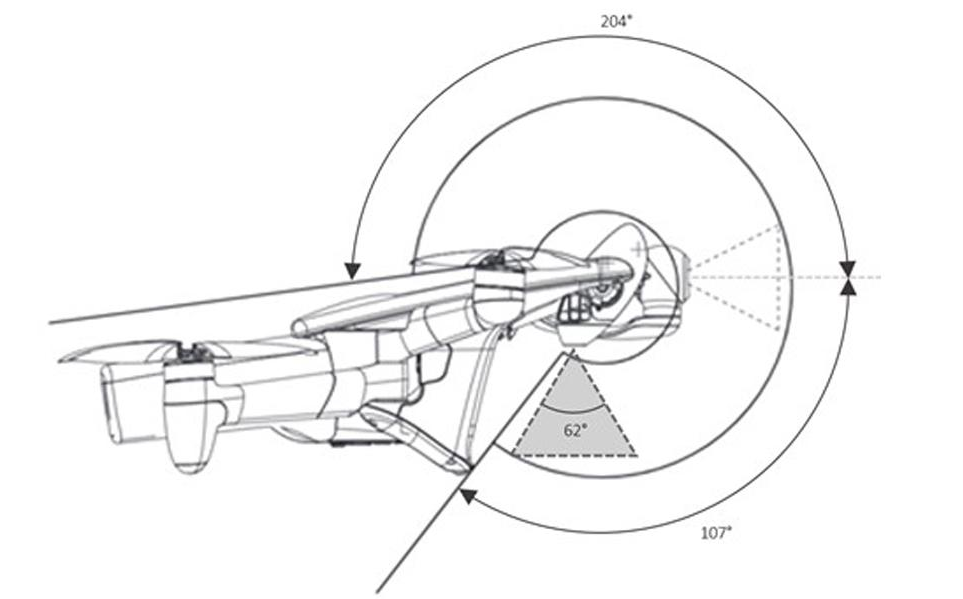
Chwilowe pionowe pole widzenia i systemy ograniczające percepcję ANAFI Ai.
System został zaprojektowany w taki sposób, aby:
- Łopaty śmigła nie wchodziły w pole widzenia kamery głównej
- Główna kamera nie zasłania pola widzenia systemu percepcji
- Aparat główny i system czujników można całkowicie złożyć w celu ochrony obiektywów
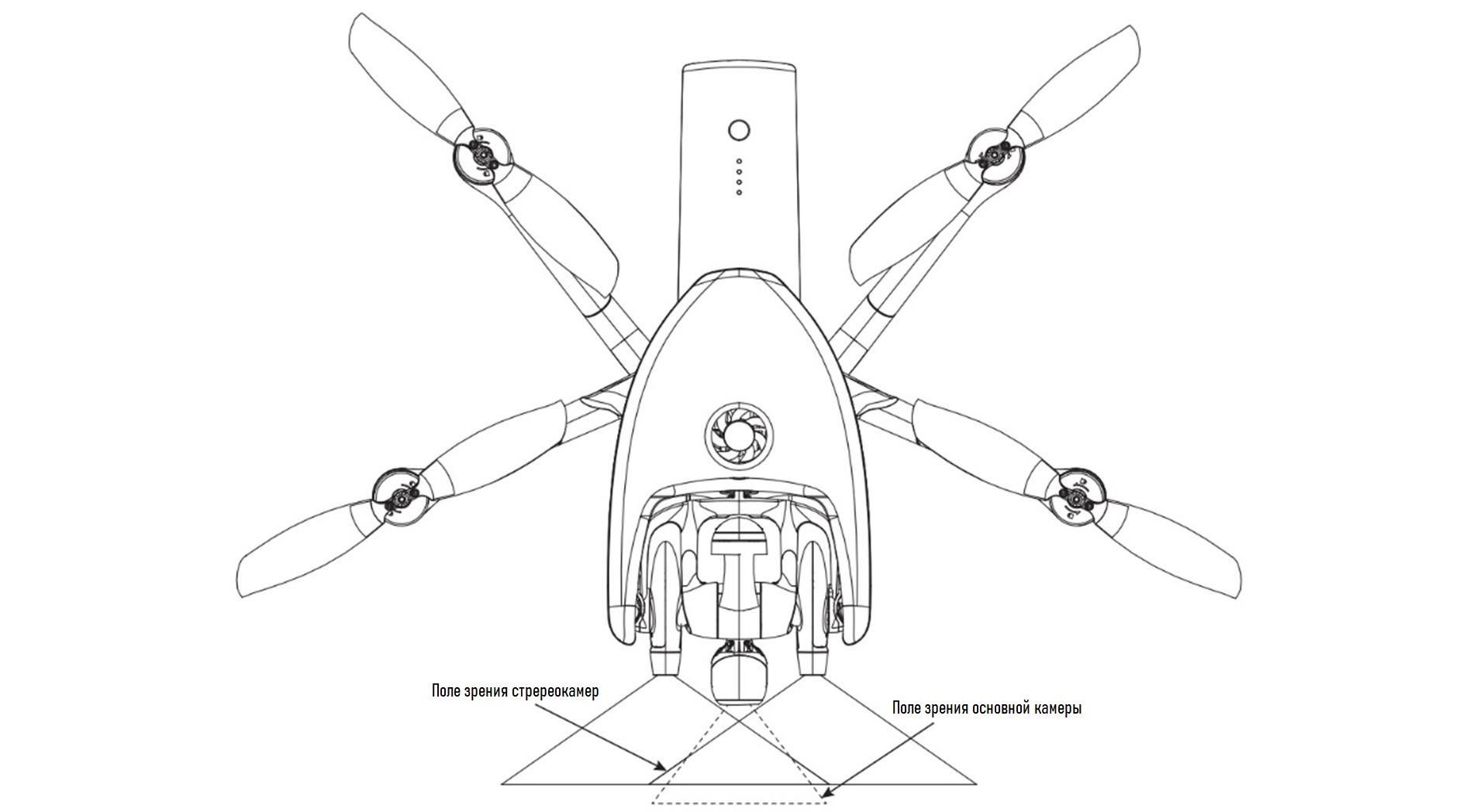 Poziome pole widzenia systemu percepcji ANAFI Ai.
Poziome pole widzenia systemu percepcji ANAFI Ai.
Podczas odchylania się do tyłu, system percepcji przesuwa się do najwyższej pozycji, zapewniając w ten sposób wyraźny widok.
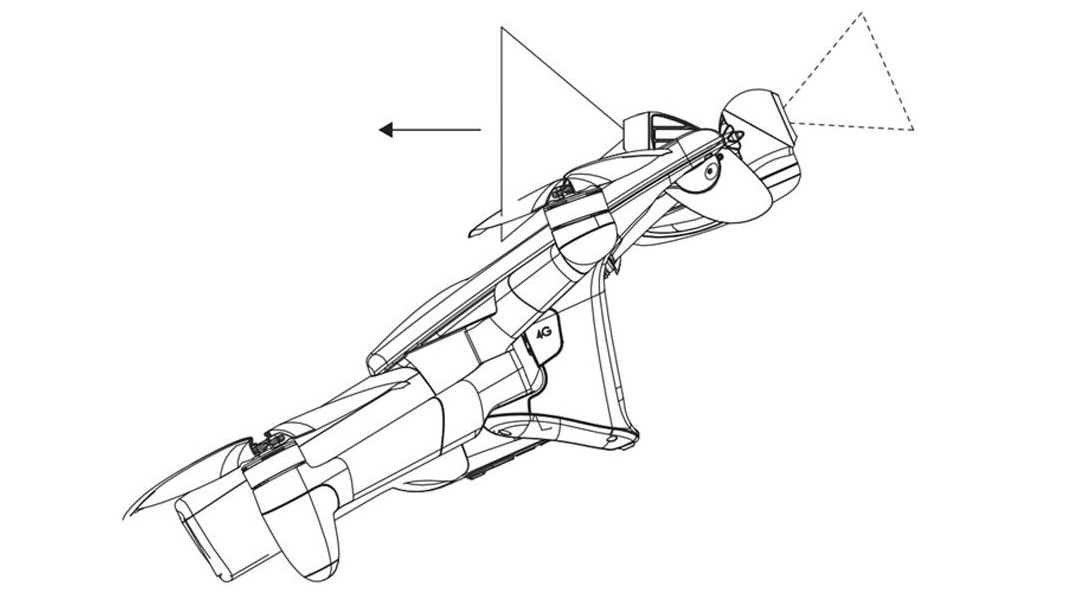
Postrzeganie ANAFI Ai w pozycji całkowicie pochylonej do lotu do tyłu.
Rekonstrukcja otoczenia
Rekonstrukcja otaczającego trójwymiarowego środowiska do autonomicznego lotu odbywa się w dwóch etapach:
- Pozyskiwanie informacji o głębi z percepcji w postaci map głębi
- Łączenie danych mapy głębi w trójwymiarową siatkę wypełnienia
Do uzyskania map głębi z czujników percepcji stosuje się dwie metody:
- Głębokość na podstawie wyrównania stereo
- Głębokość od ruchu
Głębokość od korespondencji stereo
Główna metoda wydobywania głębi informacja oparta jest na paralaksie pomiędzy dwiema kamerami stereo systemu percepcji. Fotografując otoczenie w jednym kierunku, ale z dwóch różnych pozycji, obiekty w polu widzenia systemu percepcyjnego pojawiają się w różnych pozycjach na obrazach uzyskiwanych przez dwie kamery. Im bliżej obiektu, tym większa różnica w pozycji.
Tak więc strategia polega na wyznaczeniu punktów na obrazach uzyskanych przez lewą i prawą kamerę stereoskopową odpowiadających temu samemu obiektowi w polu widzenia układu czujnikowego oraz pomiar różnicy położenia tych punktów na dwóch obrazach. Ta różnica nazywana jest rozbieżnością i jest mierzona liczbą pikseli.
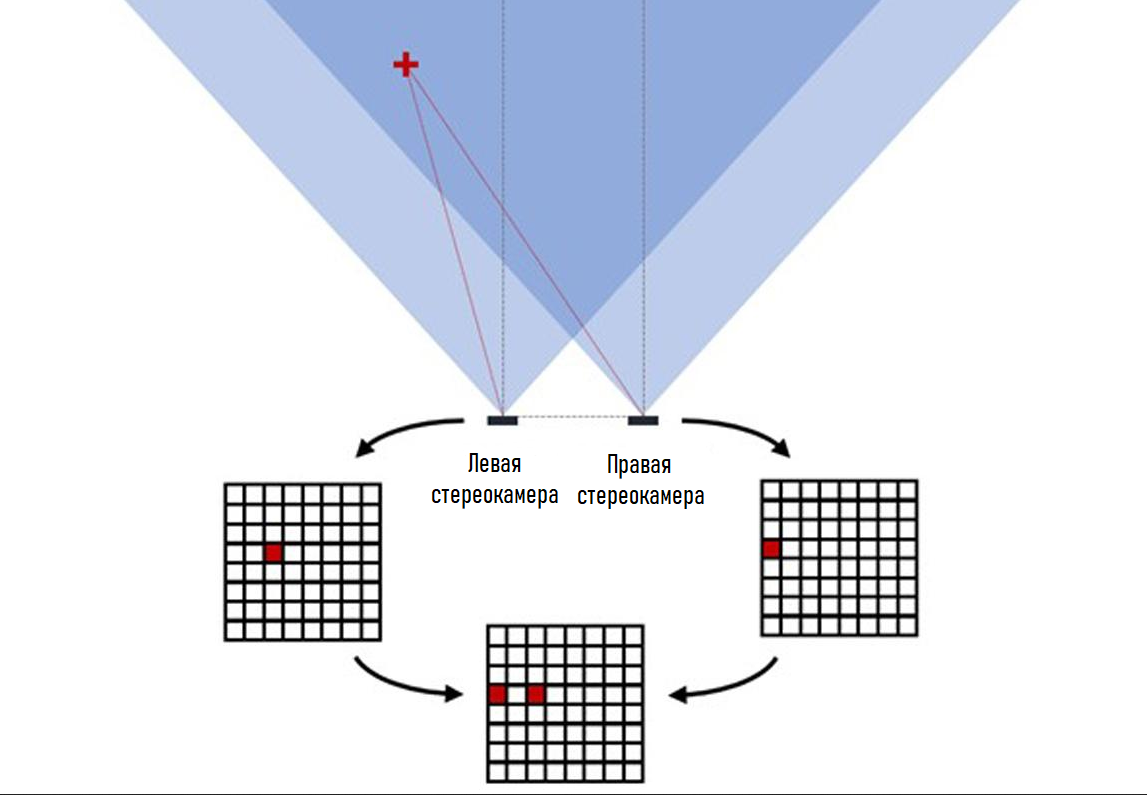 Ilustracja zasady widzenia stereoskopowego - czerwony punkt 3D znajduje się w różnych pozycjach na lewym i prawym obrazie.
Ilustracja zasady widzenia stereoskopowego - czerwony punkt 3D znajduje się w różnych pozycjach na lewym i prawym obrazie.
Rozbieżność można następnie powiązać z głębokością każdego z tych punktów za pomocą następującej zależności głębokość = ogniskowa * linia bazowa / rozbieżność, gdzie głębokość i linia bazowa są wyrażone w tych samych jednostkach, a ogniskowa długość i rozbieżność wyrażone są w liczbie pikseli.
Wynikiem obliczeń jest mapa głębi o wymiarach 176 × 90 pikseli, dla której wartość każdego piksela odpowiada głębokości w metrach. Mapa głębi jest odświeżana z częstotliwością 30 Hz.
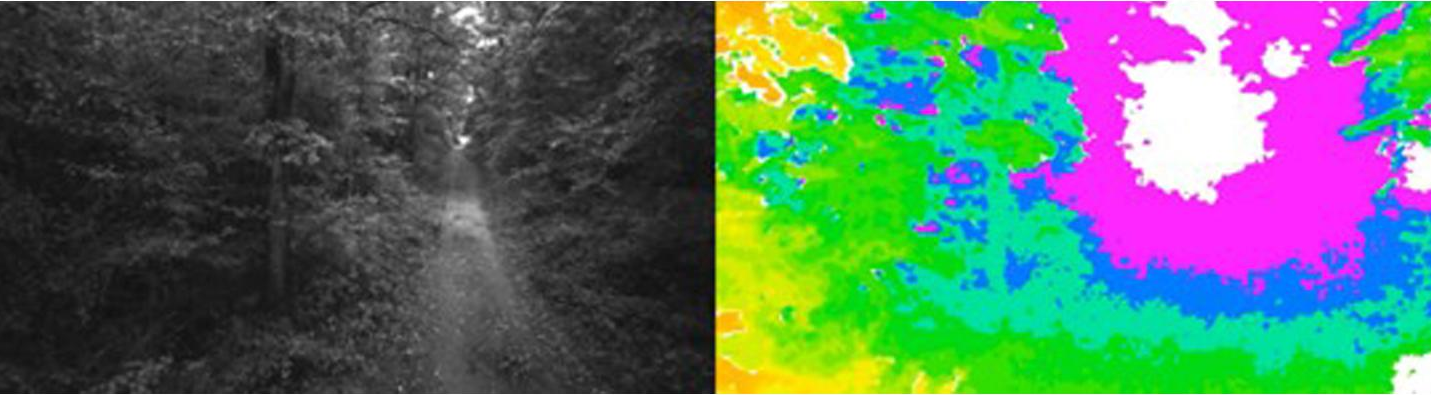
Przykład obrazu uchwyconego przez prawą kamerę systemu czujnikowego ANAFI Ai (po lewej) i odpowiadająca mu głębia uzyskana za pomocą obrazowania stereo (po prawej). Kolorowa mapa przechodzi od czerwonego (bliżej) do fioletowego (dalej) - biały oznacza poza zasięgiem.
Bezpośrednim skutkiem tego jest to, że głębokość mierzona tą metodą jest dyskretyzowana, ponieważ rozbieżność może przyjmować tylko wartości dyskretne (liczba pikseli). Punkt 3D znajdujący się wystarczająco daleko od systemu percepcji i tworzący teoretyczną rozbieżność mniejszą niż jeden piksel będzie uważany za nieskończony, ponieważ odpowiadająca mu rzeczywista dyskretna rozbieżność będzie równa 0. Dokładność metody porównania stereo maleje wraz ze wzrostem odległości, chociaż to metody, które mogą zredukować to zjawisko poprzez uzyskanie próbkowania subpikselowego.
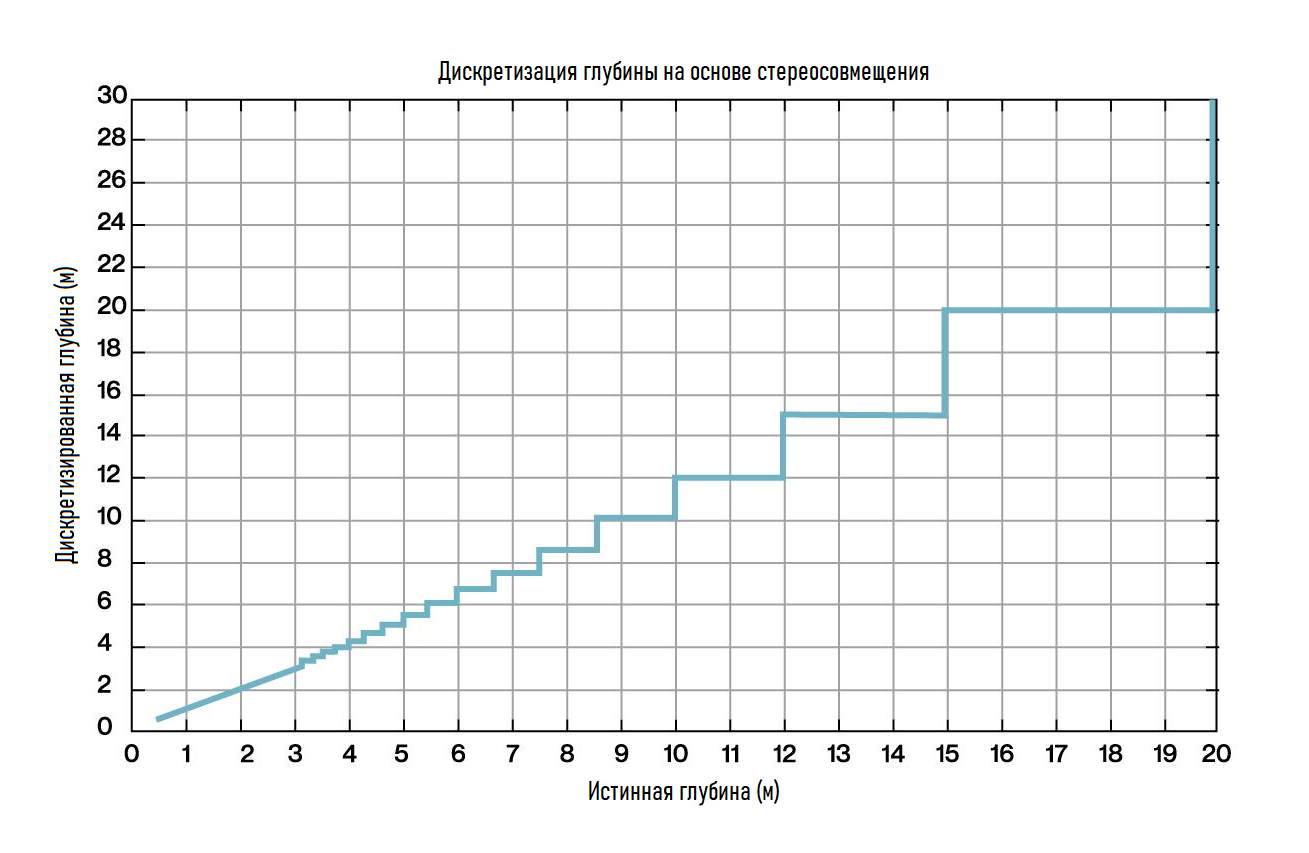 Dyskretna głębokość mierzona przez „ustawienie stereo” w stosunku do „rzeczywistej głębokości”.
Dyskretna głębokość mierzona przez „ustawienie stereo” w stosunku do „rzeczywistej głębokości”.
Ponadto, rozbieżność zmienia się, gdy głębokość zbliża się do zera. Ponieważ liczba pikseli w obrazach jest ograniczona, wartość rozbieżności również jest ograniczona. W konsekwencji istnieje minimalna głębokość, na której system percepcyjny jest ślepy. Ta minimalna głębokość wynosi 36 cm dla ANAFI Ai.
O Kalibracji: Każda para kamer stereoskopowych jest fabrycznie skalibrowana, aby dokładnie zmierzyć małe rozbieżności, które mogą istnieć między dwiema kamerami i skompensować je w obliczeniach głębokości na pokładzie.
Użytkownik może również ponownie skalibrować parę kamer stereoskopowych przy użyciu wzorca testowego dostarczonego z dronem. W szczególności w pewnym stopniu dron jest w stanie wykryć potencjalne błędy kalibracji, które mogą pojawić się w trakcie jego życia. W takim przypadku oprogramowanie samolotu spróbuje je dostosować i zrekompensować, a jeśli to się nie powiedzie, pojawi się powiadomienie z prośbą o ponowną kalibrację.
Głębokość od ruchu
Ruch drona może być również wykorzystany do zbierania obrazów otoczenia pod różnymi kątami, a tym samym do rekonstrukcji informacji o głębokości. Ta technika nazywana jest głębią z ruchu lub wykrywaniem jednoocznym, ponieważ do zebrania informacji o głębokości wystarczy jedna poruszająca się kamera.
Zasada działania jest podobna do stereowizji, ale zamiast porównywania obrazów otoczenia uzyskanych przez różnych obserwatorów w tym samym czasie, percepcja porównuje obrazy otoczenia uzyskane przez tego samego obserwatora w różnym czasie. Jeśli dron się porusza, obrazy tego wyjątkowego obserwatora będą rejestrowane pod różnymi kątami. Znając pozycję, w której wykonano każdą klatkę, można dokonać triangulacji punktów odpowiadających tej samej funkcji na różnych obrazach i przywrócić je do 3D.
Dane wyjściowe to trójwymiarowa chmura punktów zawierająca do 500 punktów dla ANAFI Ai, generowana z częstotliwością 10 Hz.
 Przykład chmury punktów utworzonej na podstawie głębokości z ruchu - kolorowa mapa przechodzi od czerwonego (Bliżej) do fioletowego (Dalej).
Przykład chmury punktów utworzonej na podstawie głębokości z ruchu - kolorowa mapa przechodzi od czerwonego (Bliżej) do fioletowego (Dalej).
Algorytm ANAFI Ai Motion Depth zazwyczaj generuje mniej informacji (rzadka chmura punktów) niż algorytm dopasowania stereo i wymaga poruszania się drona w celu zebrania informacji. Ponadto algorytm ten nie może wyodrębnić informacji w dokładnym kierunku ruchu (przynajmniej w przypadku transmisji na żywo), ponieważ obiekty na obrazach wydają się w tym kierunku prawie nieruchome (ostrość ekspansji).
Jednak ma lepszy zasięg wykrywania (teoretycznie nieskończony zakres) niż dopasowanie stereo.
Siatka wypełnienia
Informacje o głębokości z algorytmów wykrywania stereo i monokularu są zintegrowane z siatką wypełnienia. Ta siatka próbkuje środowisko 3D do kostek 3D zwanych wokselami. Każdemu wokselowi przypisane jest prawdopodobieństwo zajęcia się przeszkodą lub odwrotnie, bycia wolnym od przeszkody.
Algorytm transmisji promieni jest używany do integracji informacji o głębokości w siatkę wypełnienia. Dla każdego piksela mapy głębi uzyskanej w wyniku stereoporównania jest on zamieniany na punkt trójwymiarowy, a dla każdego punktu chmury punktów - na głębokość uzyskaną w wyniku ruchu:
- Promień jest rysowany w siatce wypełnienia od pozycji systemu percepcji do pozycji punktu 3D.
- Zwiększa się prawdopodobieństwo zajęcia woksela zawierającego punkt 3D.
- Zmniejsza się prawdopodobieństwo, że wszystkie woksele przecięte przez promień inny niż ten zawierający punkt 3D są zajęte.
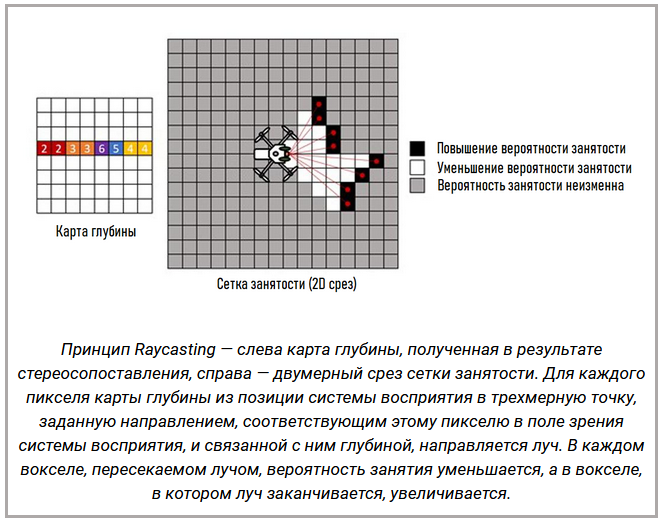
W ten sposób siatka działa jako filtr czasowy dla informacji o głębokości, absorbując wszelkie potencjalne szumy w pomiarze głębokości oraz jako pamięć poprzednich pomiarów, co pozwala możesz poruszać się w trudnych środowiskach nawet przy braku ciągłego pola widzenia 360° systemu percepcji.
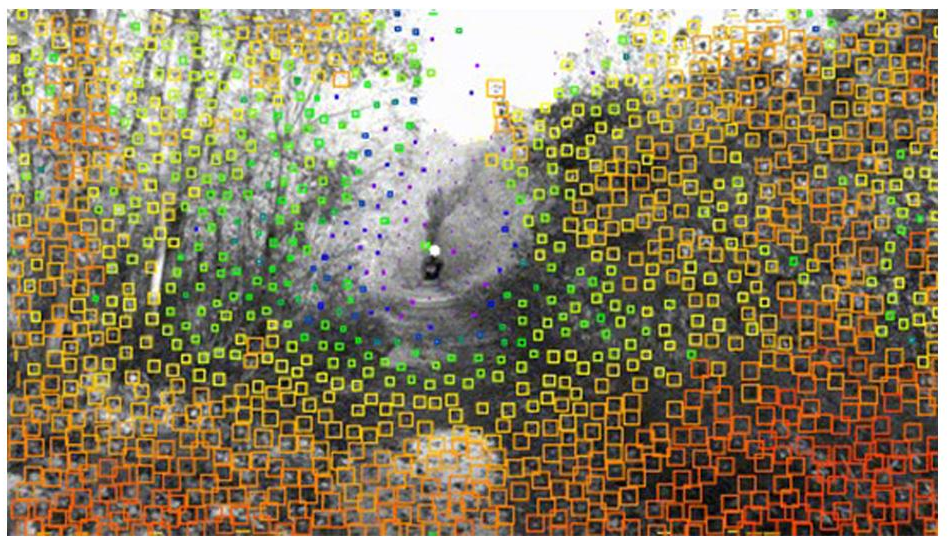
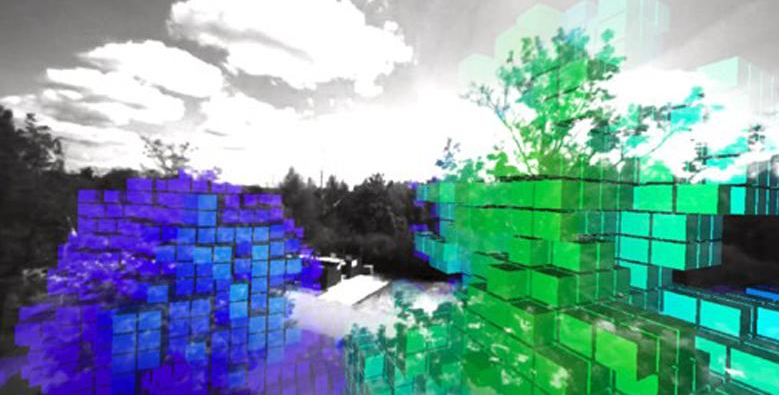 Przykład siatki wypełnienia. Woksele są nakładane na widok z prawej kamery stereo z wysokim stopniem pewności, że są zajęte, od czerwonego (blisko) do fioletowego (daleko).
Przykład siatki wypełnienia. Woksele są nakładane na widok z prawej kamery stereo z wysokim stopniem pewności, że są zajęte, od czerwonego (blisko) do fioletowego (daleko).
Siatka wypełnienia jest podstawą algorytmów planowania ruchu wykorzystywanych przez ANAFI Ai do autonomicznego lotu i unikania przeszkód.
Unikanie przeszkód
Dzięki znajomości środowiska 3D drona przechowywanego w siatce wypełnienia, ANAFI Ai może omijać przeszkody. Zapewnia to znaczne dodatkowe bezpieczeństwo w misjach autonomicznych, ale jest również przydatne w ręcznym locie, zwłaszcza jeśli linia wzroku między pilotem a dronem jest osłabiona.
Co 30 ms ANAFI Ai przewiduje, jaki będzie nominalny krótki horyzont czasowy w przyszłości. Ta prognoza jest wywnioskowana z linków przesłanych przez użytkownika, niezależnie od tego, czy są to polecenia lotu z pilota, punkty drogi do dołączenia do planu lotu, czy trajektoria wejściowa. Następnie, korzystając z symulowanego wewnętrznego modelu drona, algorytm zmiany harmonogramu oblicza najmniejsze możliwe poprawki do tej przewidywanej trajektorii nominalnej, dzięki czemu jest on bezkolizyjny i możliwy do zrealizowania dla drona.
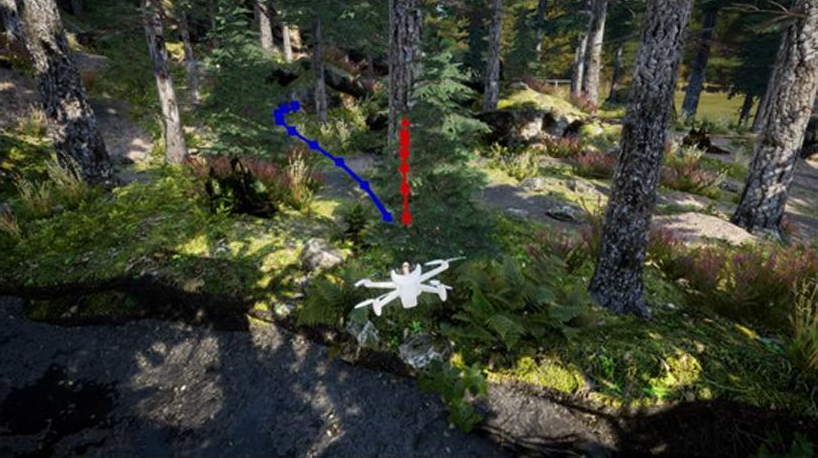 Przykład skorygowanej trajektorii obliczonej przez algorytm unikania przeszkód w odpowiedzi na zderzenie trajektorii odniesienia z drzewem.
Przykład skorygowanej trajektorii obliczonej przez algorytm unikania przeszkód w odpowiedzi na zderzenie trajektorii odniesienia z drzewem.
System omijania przeszkód ANAFI Ai został zaprojektowany do pracy przy prędkościach do:
- Lot poziomy: 29 km/h
- Wznoszenie: 14 km / h
- Spadek: 11 km / h
Skuteczność unikania jest ograniczona w przypadku deszczu lub silnego wiatru, słabego oświetlenia lub zakłóconej nawigacji satelitarnej. Ponadto przed lotem należy upewnić się, że soczewki układu czujnikowego są czyste.
Misje lotnicze

Najważniejsze cechy
Powietrze SDK (patrz.sekcja SDK) umożliwia programistom dostęp do każdego czujnika drona, kamery, interfejsu łączności i samodzielnej funkcji. Dlatego mogą dostosować zachowanie drona, aby tworzyć misje lotnicze. Każda misja lotnicza zawiera zestaw podstawowych zachowań lub trybów:
- Na ziemi: Zachowanie przy zatrzymanych silnikach, np. kalibracja czujników.
- Start: różne strategie startu
- Unoszenie się: utrzymywanie stałego punktu
- Lot: ręczny funkcje i lot autonomiczny
- Lądowanie: różne strategie lądowania
- Krytyczne: po wykryciu stanu krytycznego
Niestandardowe misje lotnicze mogą tworzyć nowe zachowania lub wykorzystywać je ponownie z misji domyślnej.
Cena i dostępność
Rozpoczęcie sprzedaży drona ANAFI Ai planowane jest na wrzesień 2021 roku. Informacje o cenie nie zostały w tej chwili ujawnione. Nadal monitorujemy napływające informacje i na pewno zaktualizujemy tę sekcję w późniejszym terminie.

Pobierz dokumentację
Dokumentację programisty:
Filmy
Najlepsze recenzje ANAFI Ai z deweloper i użytkownicy
Rozpakowanie i pierwszy lot.
Lot próbny drona na odległość z połączeniem 4G. Całkowity czas lotu wyniósł 29 minut przy średniej poziomej prędkości lotu 58 km/h (16 m/s). W tym czasie dron był w stanie pokonać 27 km. Można również zauważyć, że lot odbywał się w warunkach silnego wiatru, o czym nieustannie ostrzegał system dronów.
.






