
- 1 介绍
- 2 开发人员关于机器
- 3 特点
- 4 包装内容
- 5 规格
- 5.1 无人机
- 5.2 通信
- 5.3 导航系统
- 5.4 Skycontroller 4
- 5.5 飞行器智能电池
- ) 5.6 应用程序
- 5.7 摄像头
- 5.8 自主飞行模式
- 5.9 网络安全
- 5.10 Parrot SDK
- 6 外观
- 7 通讯
- 7.1 4G
- 7.2 4G 连接范围
- 7.3 Wi-Fi
- 7.4 实时视频
- 8 摄像头
- 8.1 48MP 矩阵
- 8.2 镜头
- 8.3 视频模式
- 8.4 视频编码
- 8.5 HDR
- 8.6 照片模式
- 9混合稳定
- 9.1 主相机云台
- 10 摄影测量
- 10.1 检查和制图 ]
- 10.2 AI 和 4G 功能
- 10.3 自主飞行
- 11 摄影测量或激光雷达
- 11.1 摄影测量优点
- 11.2 激光雷达缺点
- 12 SDK
- 12.1 空中 SDK
- 12.2 地面 SDK
- 12.3 OpenFlight
- 12.4 Sphinx ]
- 12.5 Olympe
- 12.6 PdrAW
- 12.7 型号 C. A. D.
- 12.8 MAVLink 和 GUTMA 兼容性
- 13 Parrot 无人机最大的合作伙伴生态系统
- 13.1 Parrot满足任何业务需求
- 14 网络安全
- 14.1 数据隐私
- 14.2 符合 FIPS140 -2并通过 CC EAL5 安全元件认证
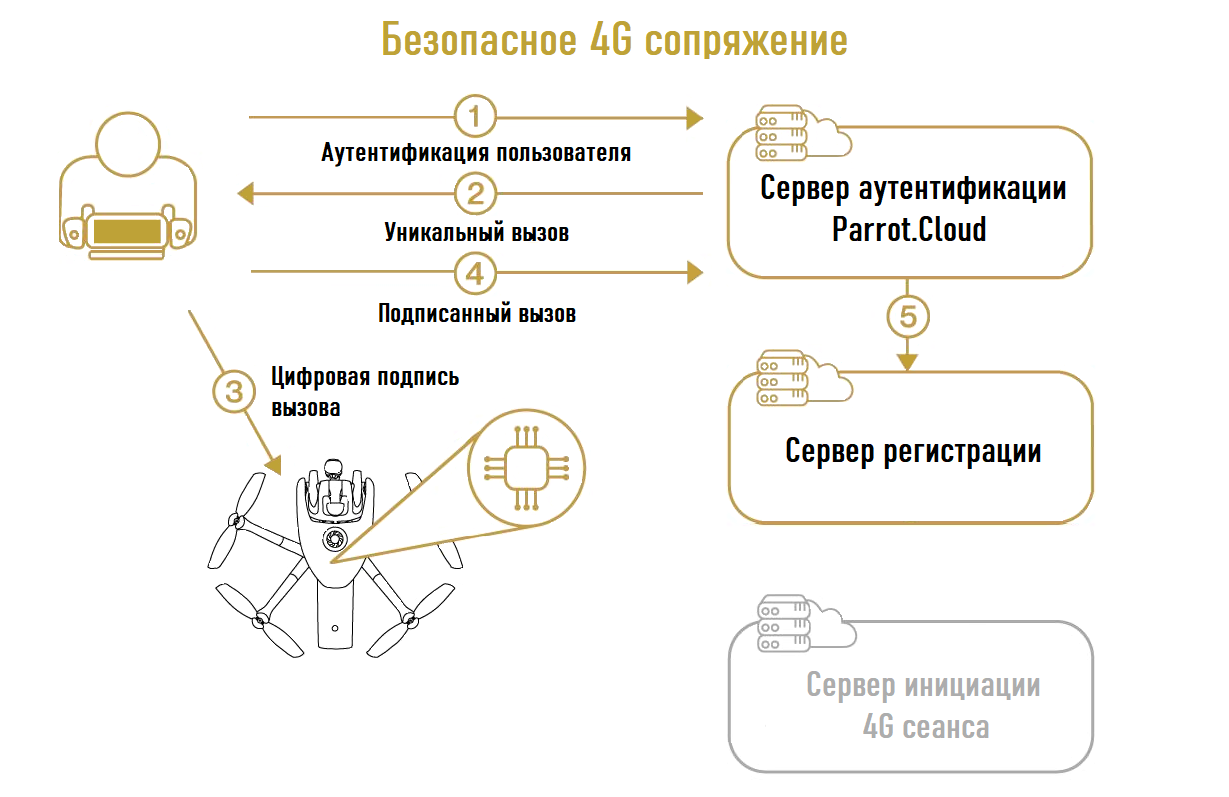
- 14.3 4G 安全连接和强认证
- 14.4 安全初始化和升级
- 14.5 在安全元件上设置用户密钥
- 14.6 数字签名照片
- 14.7 透明度和持续安全检查和漏洞赏金
- 15 数据管理
- 15.1 收集到的数据
- 15.2 收集到的数据的最终用途
简介[16 4]
Parrot Anafi Ai 是来自 一位著名的法国开发商商业用途
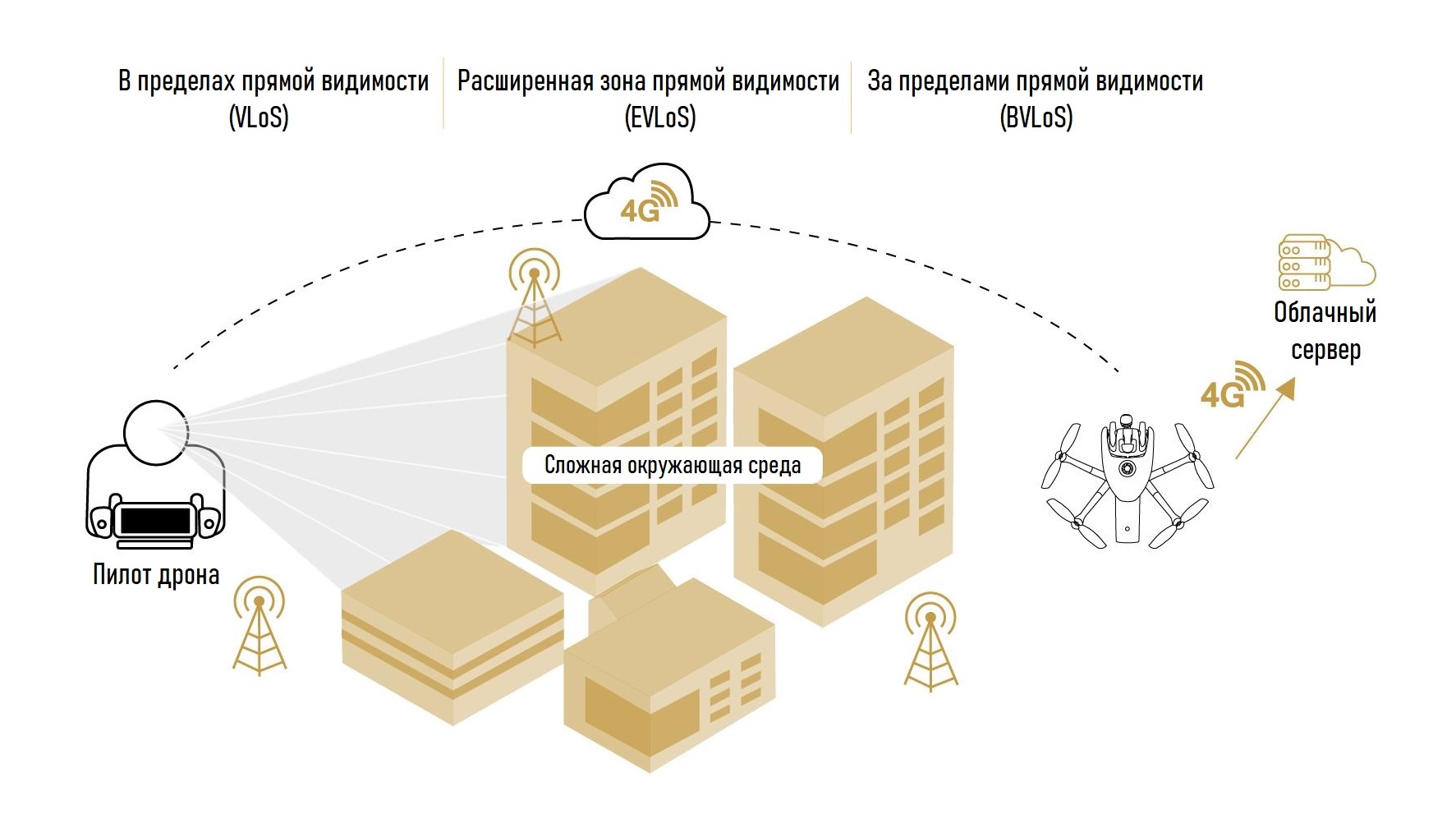
Anafi Ai 的电话卡是内置4G 模块,因此无人机能够使用第四代移动通信作为无人机与控制设备之间的主要数据传输通道,这实际上取消对飞行范围的所有限制,并预先确定无人机在视线外的操作。展望未来,我们注意到这台机器所宣称的潜力被证明是非常强大的,并且比以往任何时候都更符合其未来派外观,其灵感来自大自然,创造了法国工程师。
关于汽车的开发商
Martin Lineé,Parrot的营销总监 ,关于 ANAFI Ai 无人机是如何创建的:在 Parrot,我们由一种激情驱动 - 仿生学。到目前为止(173),鹦鹉无人机

特点
Parrot Anafi Ai 的主要特点:
- 重量 898 克
- 飞行时间 60 秒
- 独特的便携式可折叠设计
- 内置 4G 通信模块,可在所有环境条件下不受限制地实现无人机/控制设备交互
- ) 兼容全球 LTE
- 配备全向信号传输系统(4 个带反射器的定向天线(增益:2.5 dBi / s 天线)。无人机根据其相对于其的方向和位置确定最佳天线对飞行员位置)
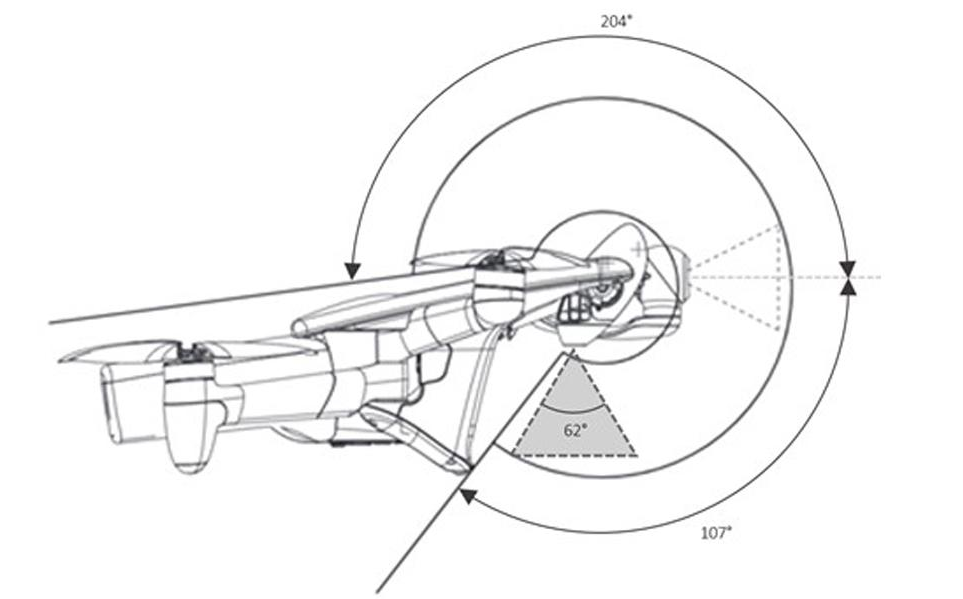
- 配备独特的周围世界全向成像系统,该系统建立在一对立体相机上,安装在具有 330 度平移范围(从 -120° 到 210°)的专用云台上,与智能优化系统协同工作。飞行路径
- 适用于室内飞行
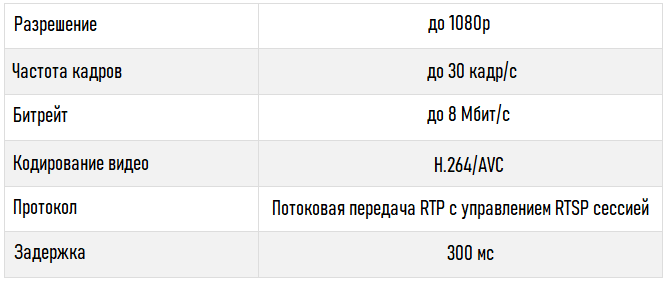
- 1080p 实时视频流,低延迟 (300 m / s),在世界任何地方都没有范围限制,视频比特率为 12 Mbps
- 能够在飞行中直接将文件传输到云存储
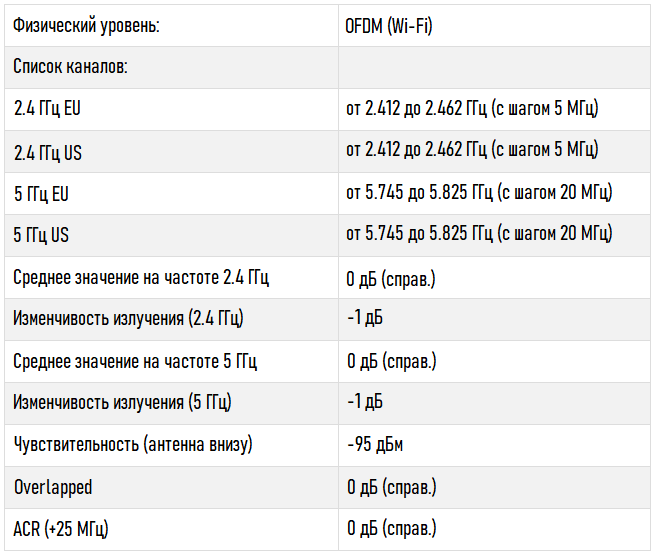
- 内置 Wi-Fi 通信模块(Wi-Fi 802.11a / b / g / n),用于成熟的无人机/设备交互控制(如另一种连接选项)
- 从站。 Wi-Fi 频率范围:2.4GHz / 5.8GHz
- FPV 在 Wi-Fi 上的飞行范围:9 公里
- 4G / Wi-Fi 模块独特的自动操作模式,允许根据网络拥塞情况从一种通信技术无缝切换到另一种通信技术而不会丢失数据
- 防护等级无人机 IPX3
- 飞行时间 32 分钟
- 水平飞行速度 61 公里/小时
- Max.抗风能力:13 m/s
- 海拔 5000 m
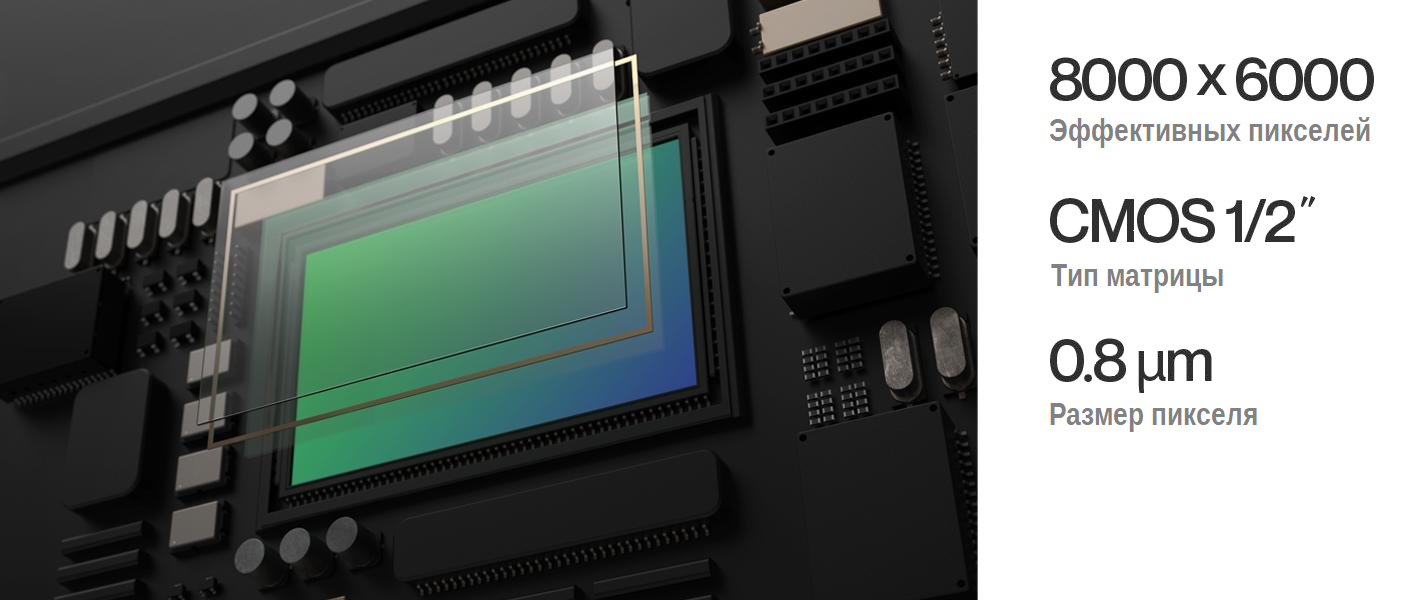
- 48MP 4K 摄像机,内置 1/2 英寸 CMOS 矩阵,像素尺寸为 0.8 μm;内置拜耳滤色器阵列
- 光学 LD-ASPH 镜头
- 混合 6 轴图像稳定系统(3 轴机械 3 轴数字 EIS)
- 可控云台 -90° 至 90°
- 6 倍无损数字变焦 (2x 4K / 4x FHD)
- 视频比特率 200 Mbps
- 视频录制格式 HDR8 / HDR10
- 动态范围 14EV
- 用于后处理的 P-log 颜色配置文件
- 5 × 自动飞行和拍摄模式(摄影测量 / 飞行计划 / 摄影师 / 智能 RTH / 车辆)
- 用于 MicroSD 和 SIM 卡的内置插槽
- 与 PIX4D 套件兼容
- mob 中提供摄影测量飞行模式。 FreeFlight 7 应用程序和 OpenFlight 软件
- 一键创建飞行计划
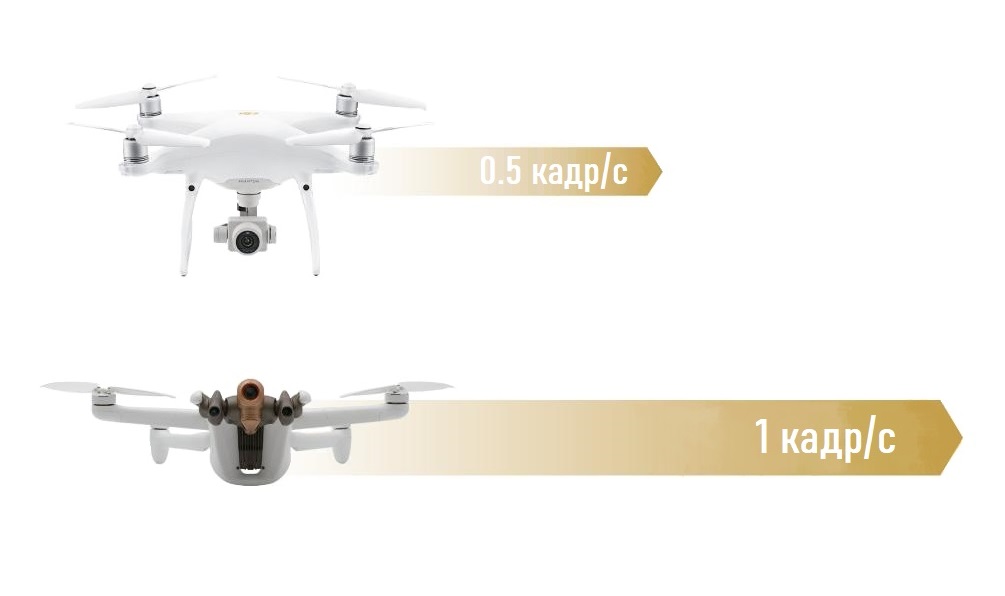
- 48MP 1 fps 摄影测量:比竞争对手快两倍
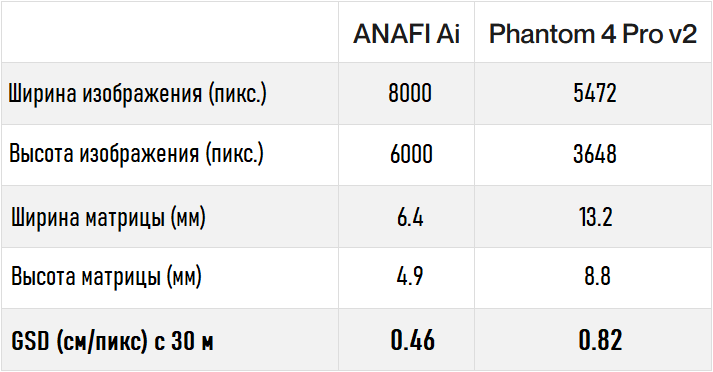
- 拍摄精度:0.46 cm / pix。GSD at 30m
- Parrot SDK 支持(能够使用 Air SDK 将代码嵌入无人机,使用 Ground SDK 创建移动应用程序,使用 OpenFlight 配置开源地面站,与现代 Sphinx 交互无人机模拟工具以及使用 Olympe 编写的 Python 脚本以及使用 PdrAW 进行视频和元数据处理)
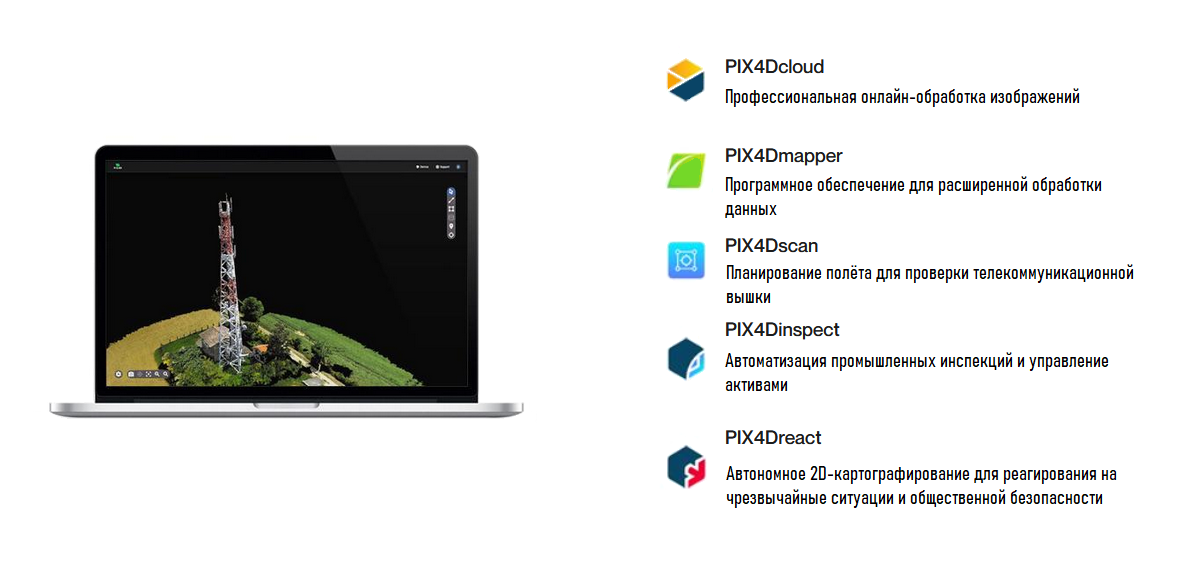
- 与 3rd 方软件兼容:PIX4Dscan、PIX4Dinspect、PIX4Dcloud、PIX4Dreact、PIX4Dsurvey
- ANAFI Ai 符合法规 欧盟数据保护条例 (GDPR)
- 卓越的数据隐私,内置 NIST FIPS140-2 3 级 WISeKey 安全元件,具有通用标准 EAL5 认证
- 视频和控件受 SRTP / DTLS 保护根据webRTC
- 新型Parrot Skyco便携式控制设备ntroller 4
- 新移动应用 Parrot FreeFlight 7

Package
开发商提供无人机在单一配置中,将包括:
- Drone ANAFI Ai
- 刚性运输箱
- 控制设备 Parrot Skycontroller 4
- 1 × Smart电池
- USB-PD 充电器
- 备用螺旋桨套件 (2CW / 2CCW)
- 配套电缆(USB-C 到 Lightning)
- 2 × 配套电缆(USB-C 转 USB-C)
- 校准表

规格
) 飞机

通讯
导航系统

飞机智能电池]
App

)摄像头

) 自主飞行模式
Parrot SDK
接下来,你可以熟悉Parrot Anafi Ai的关键信息,让您更了解该机所宣称的潜力,以及与商业版无人机(571)Parrot Anfi相比有哪些改进Thermal和其他领先品牌的无人机。





通讯
4G
ANAFI Ai 包括 4G 无线电模块(除了Wi-Fi 无线电模块),它允许您以 1080p 质量广播视频流,最大比特率为 12 Mbps,延迟极低(300 毫秒),不受范围和世界任何地方的限制。
兼容性
ANAFI Ai 4G 模块支持超过 28 个频段,覆盖全球部署频率的 98% 以上。
自动网络切换
每 100 毫秒测量一次 4G 和 Wi-Fi 网络的质量和带宽,以使流媒体适应网络条件。结合路由算法,即使 Wi-Fi 严重中断,无人机与其控制器之间的连接也能保持。因此,当 Wi-Fi 的有效带宽(可用带宽)低于 1.5 Mbps 时,系统将自动切换到 4G。
当飞行员在无人机的 Wi-Fi 网络范围内时,为了限制移动数据的消耗,从 4G 到 Wi-Fi 的过渡也会自动执行,而不会切断视频流。
范围与 4G 连接
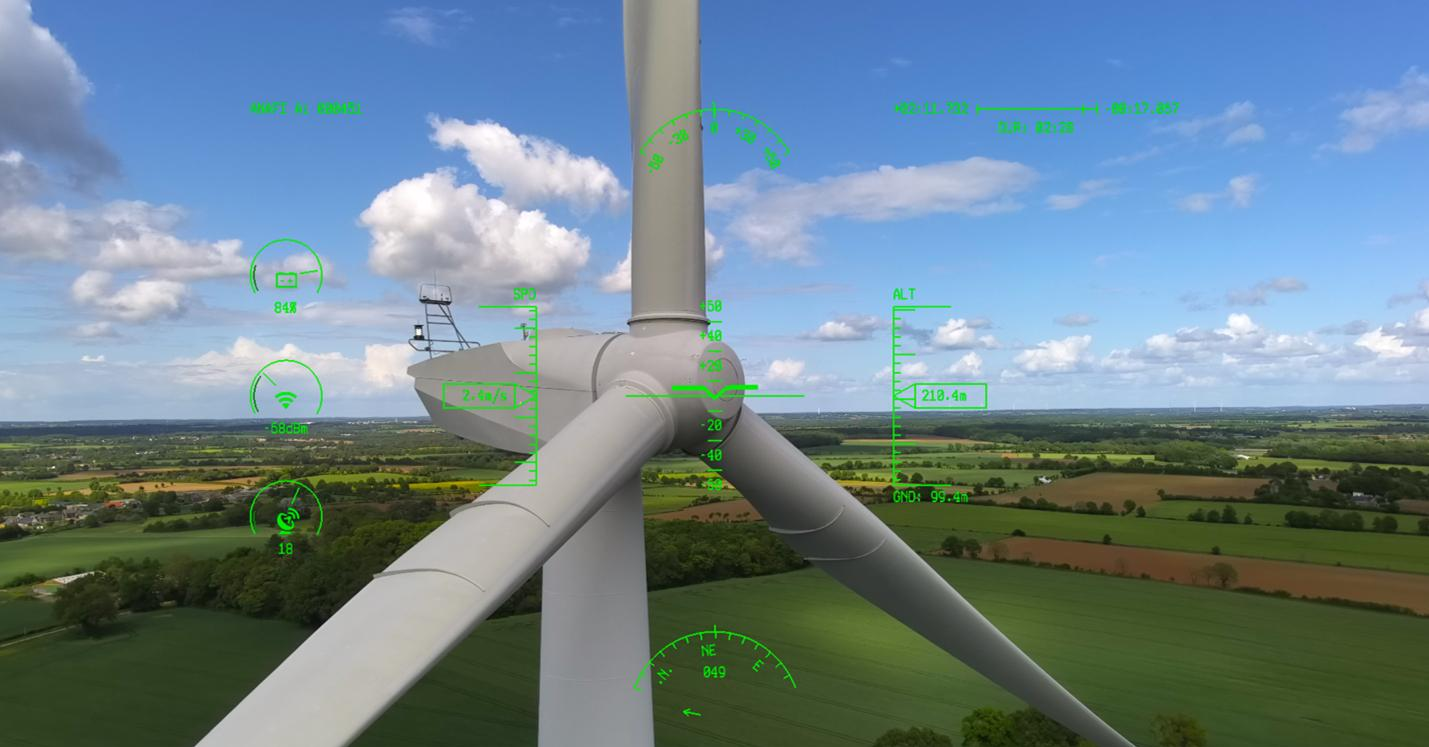
来自开发人员的视频显示了最大。一次充电,单向 4G 连接的 Anafi Ai 的飞行范围。总飞行时间为 29 分钟,平均水平飞行速度为 58 公里/小时(16 米/秒)。在此期间,无人机能够覆盖 27 公里。您还可以注意到飞行是在强风条件下进行的,无人机系统会不断发出警告。
实施的视频流优化算法
4G 拥塞控制
拥塞控制算法允许:
- 在整个网络周期测量数据包丢失。
- 测量延迟(往返时间)。
- 根据这两个参数调整带宽。
该算法的最终目标是最大化可用带宽,同时保持尽可能低的等待时间。该算法在无人机中的每个可用接口上实施,每个接口都有自己的参数,并根据网络进行优化。基于该算法提供的信息,链路管理器做出路由和活动接口决策。
通过4G连接控制无人机
ANAFI Ai通过4G连接遥控器,如果无人机不在Wi-Fi范围内,不到15秒如果无人机在 Wi-Fi 范围内。并且 4G 连接还提供:
- 基于 VOIP SIP 协议的连接的检测和启动。
- 使用中继服务器通过安全网络建立连接。
视频流性能
- 延迟:300 毫秒。
- 安全性:根据 webRTC,视频和控件受 SRTP/DTLS 保护。
- 天线:28 个 LTE 频段,从 700 MHz 到 2.6 GHz。

Wi-Fi
全向传输系统
- ANAFI Ai 有4 个定向反射天线(天线增益:2.5 dBi/s)。无人机根据其相对于飞行员位置的方向和位置来确定最佳天线对。
- 无人机水平面的重组增益为 3.5 / - 1.5 dBi,ANAFI Ai RF 增益高度均匀。
- 下游天线辐射比 ANAFI 提高了 4 dB。
高功率收音机的外部设计
收音机的前端最大限度地提高了天线底部的功率,具有非常好的线性度和灵敏度(6.5 Mbps 时为 -94 dBm)以实现最大 FCC 限制功率。

Wi-Fi 可靠性
802.11 参数
低带宽、低延迟、接收电平因速度而变化无人机,远距离,存在干扰。这些参数包括聚合、重试次数、MiMo 技术 (STBC)、控制帧数据速率和断开连接条件。
智能干扰预防
ANAFI Ai 具有在干扰情况下删除信道(2.4 GHz 和 5 GHz 双频带)的算法。
适应和流量监控
ANAFI Ai 持续监控其 4 Hz 链路的状态并且可以检测干扰。这允许您动态优化带宽和传输数据包的大小。如果飞行员处于特别干扰的环境或即将失去信号,它还会提醒飞行员。
带宽减少
在其范围的限制下,如果条件允许,ANAFI Ai 可以切换到 10 MHz 带宽,以将其灵敏度提高 3 dB,并将范围增加 40%。

无线电指示灯
视频广播
视频链接指示灯
实施的视频流优化算法
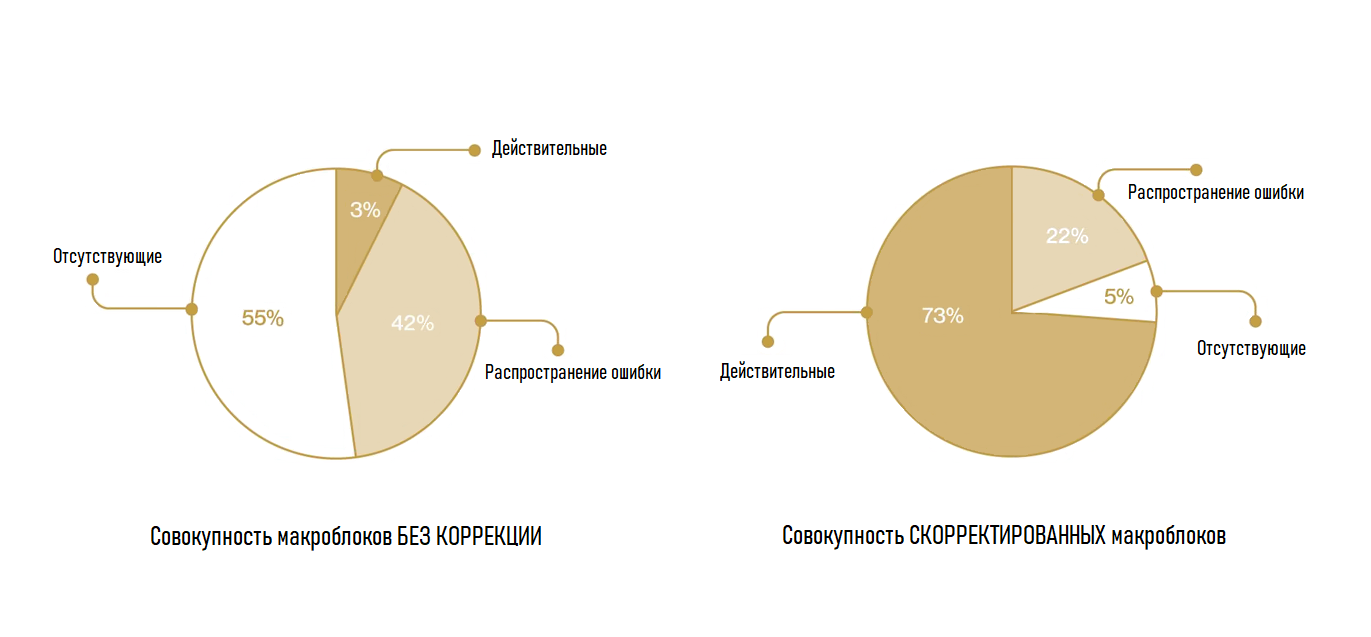
Parrot Gen4 Streaming(第 4 代)
该算法减少了网络丢失的视觉影响并提供了互操作性所有解码器,同时提供句法完整的流:图片的缺失部分被重建为缺失部分,与参考图片中的相同。
因此,故障包含在那些易于丢失的区域中,并且不适用于整个图像。
下图显示了在 5% 网络损失时宏块解码的成功率 - 有和没有 ANAFI Ai 高级流功能。该算法可确保正确解码 75% 的宏块。它们允许用户在不冻结屏幕或丢失流媒体的情况下继续他们的任务。
拥塞控制
该算法还评估 Wi-Fi 和无线电环境,以预测和避免数据包丢失和网络拥塞,这有助于减少延迟。该算法基于对信道容量的估计,根据物理层的数据速率和误码率计算;那么它会影响网络编码和封装参数。
元数据
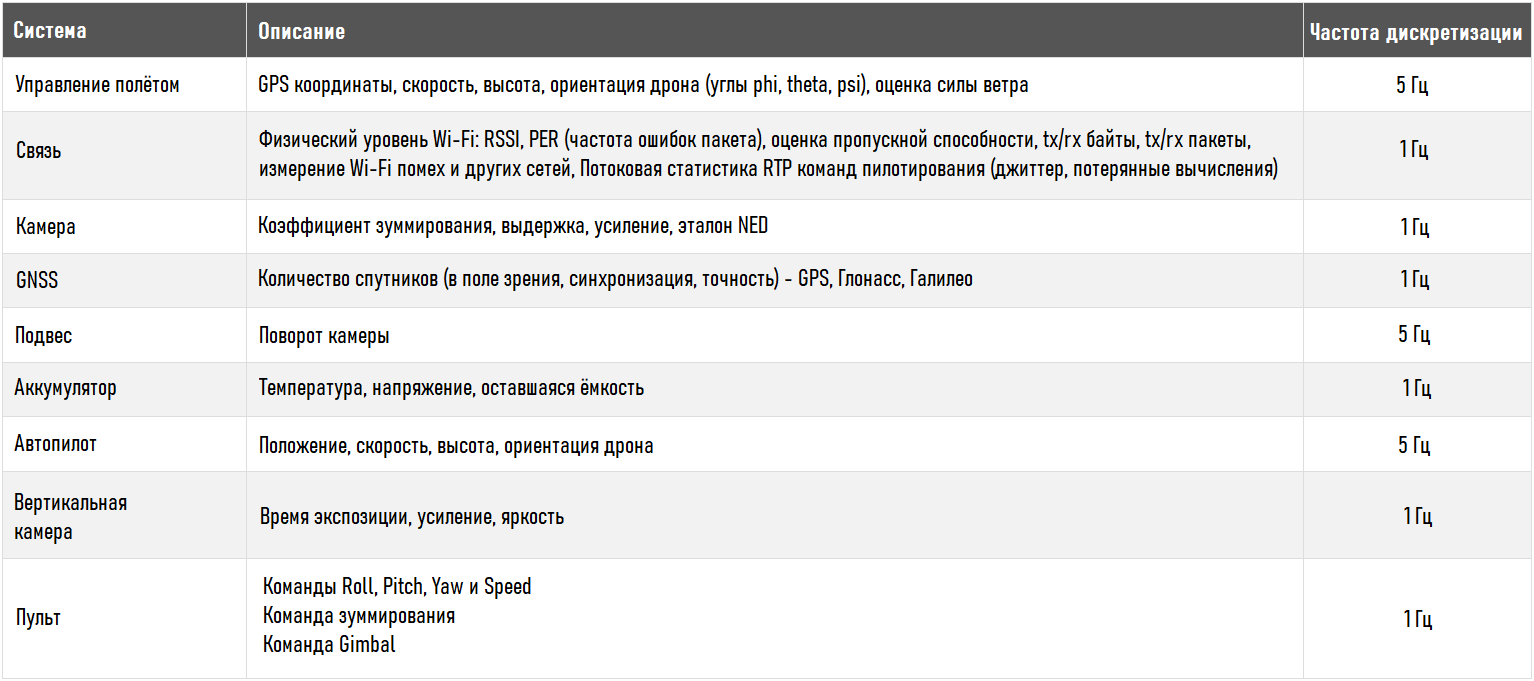
元数据与视频流一起传输。特别是,它们包含无人机遥测元素(位置、高度、速度、电池电量等)和视频指标(摄像机角度、曝光值、视野等)。
图像和开放元数据的同步执行在地图上精确定位、在 HUD 中跟踪飞行仪表或启用增强现实元素的功能。
使用标准方法(RTP 头扩展)包含元数据; Parrot 定义的数据格式是开源的:它在ANAFI Ai SDK 中可用。 【663】(664)(665)摄像头【665】【664】(666)(667)【666】(668)(669)48MP传感器【669】【668】(670)ANAFI Ai矩阵包含大量百万像素用于详细的航空摄影。
它采用 Quad Bayer 的滤色器阵列技术,其中 4 个相邻像素的组具有相同的颜色。因此,通过添加来自四个相邻像素的信号,可以在照片和视频模式下获得实时 HDR 捕获。
其动态范围是标准拜耳矩阵的 4 倍。即使是复杂的场景也能以最少的高光或阴影细节损失来拍摄。
镜头
ANAFI Ai 镜头专为 Parrot 开发。它结合了 6 个非球面镜片,并经过优化以减少光学眩光。该镜头在标准视频模式下提供 68° HFoV,在标准照片模式下提供 64.6° HFoV。

视频模式
ANAFI Ai 以每秒 60 帧的速度捕捉流畅的 4K 视频,包括 P-Log 和 HDR10 4K视频高达 30fps。下表列出了所有 ANAFI Ai 视频模式。

视频编码
用户可以在 H.264 (AVC) 和 H.265 (HEVC) 之间进行选择。
所有分辨率都使用以下像素格式:
- YUV420p (8-bpc BT.709 色彩空间)用于标准模式和 HDR8。
- YUVJ420p (8 位/分量,全范围 - BT.709 色彩空间)用于 P-log 风格。
- YUV420p10 (10bpc BT.2020 色彩空间)用于 HDR10 录制,仅限 H.265。
HDR
当以 HDR8 和 HDR10 录制视频时,ANAFI Ai 的动态范围为 14EV。 HDR10 格式的最大亮度为 1000 尼特,色深为 10 位。它提供 10 亿色域,而标准动态范围为 1600 万色域。与 HDR8 相比,HDR10 产生的图像亮度是其两倍以上,对比度也相应增加。HDR8 可以在任何标准屏幕上显示,而 HDR10 用于电视和 HDR10 屏幕。
照片模式
模式说明
模式控制部分包含影响每次释放快门时拍摄张数的设置.
单次捕捉模式
标准单次捕捉模式。每次快门释放后,系统会立即处理捕获的图像。
包围模式
用户可以连续拍摄 3、5 或 7 帧,每帧曝光不同。以下预设可用:
- [-1 EV, 0, 1 EV](默认设置)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

突发模式
突发模式将允许用户在 1 秒内拍摄 10 帧的突发。
全景模式
全景模式包括四种不同的全景拍摄:
- Spherical (360 °) 是一种全景模式,包括三个选项:拍摄球形全景:Sphere / Little Planet / Tunnel。 【718】(720)(721)水平(180°)【721】【720】(722)(723)垂直(109°)【723】【722】(724)(725)超宽【725】-新超宽幅 9 幅图像拼接模式(HFOV 110°,直线全景)
有关全景模式规格的详细信息,请参见下表:

延时拍摄模式
此模式允许您以下列固定时间间隔拍照:
- 48MP:1、2、4、10、30 或 60 秒。
- 12MP:0.5、1、2、4、10、30 或 60 秒。
GPS 延时模式
这种照片模式是为检查和摄影测量而开发的。它允许您以以下固定距离间隔拍照:5、10、20、50、100 或 200 米。
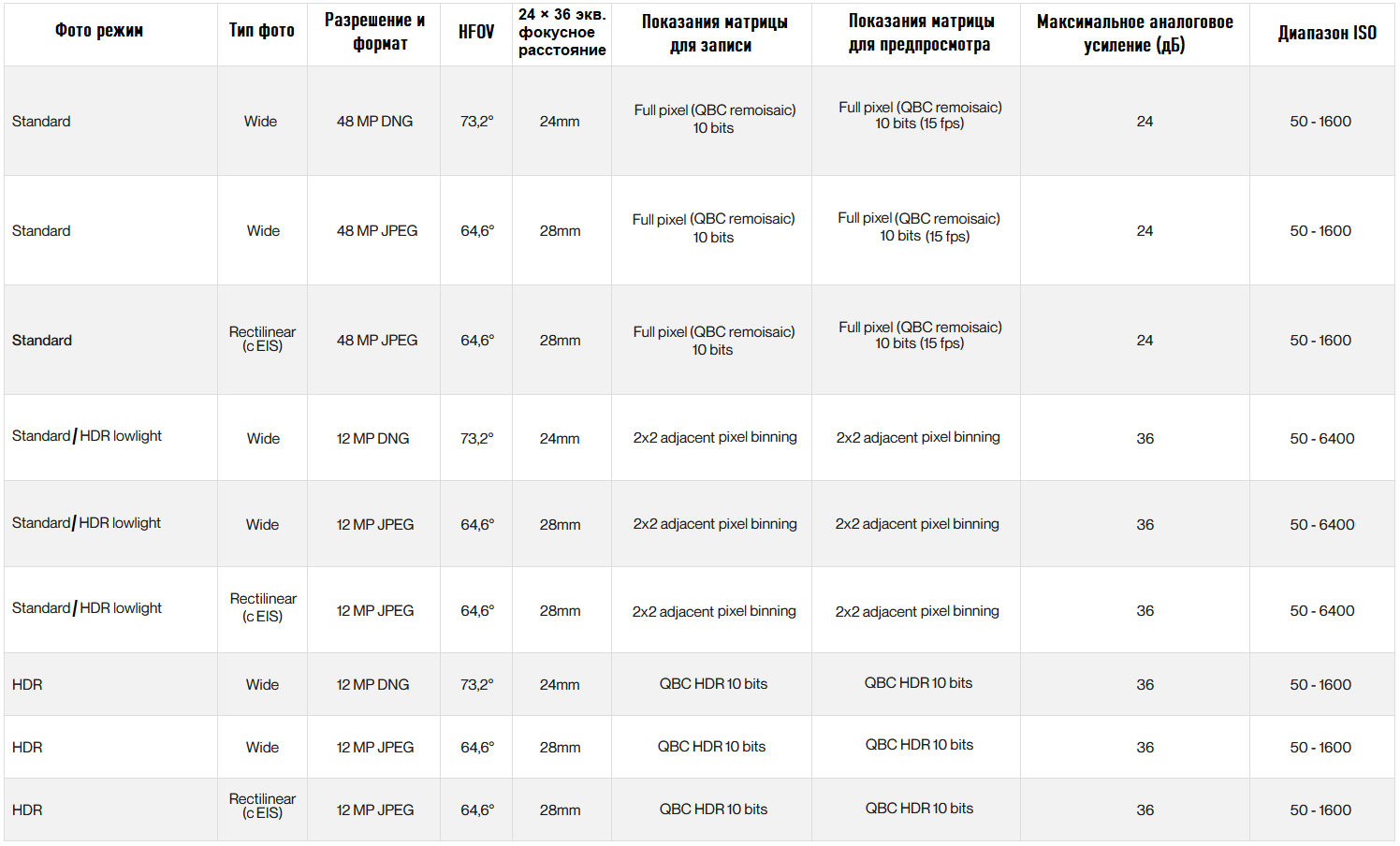
下表显示了静态图像捕获模式和分辨率,包括传感器读数模式:
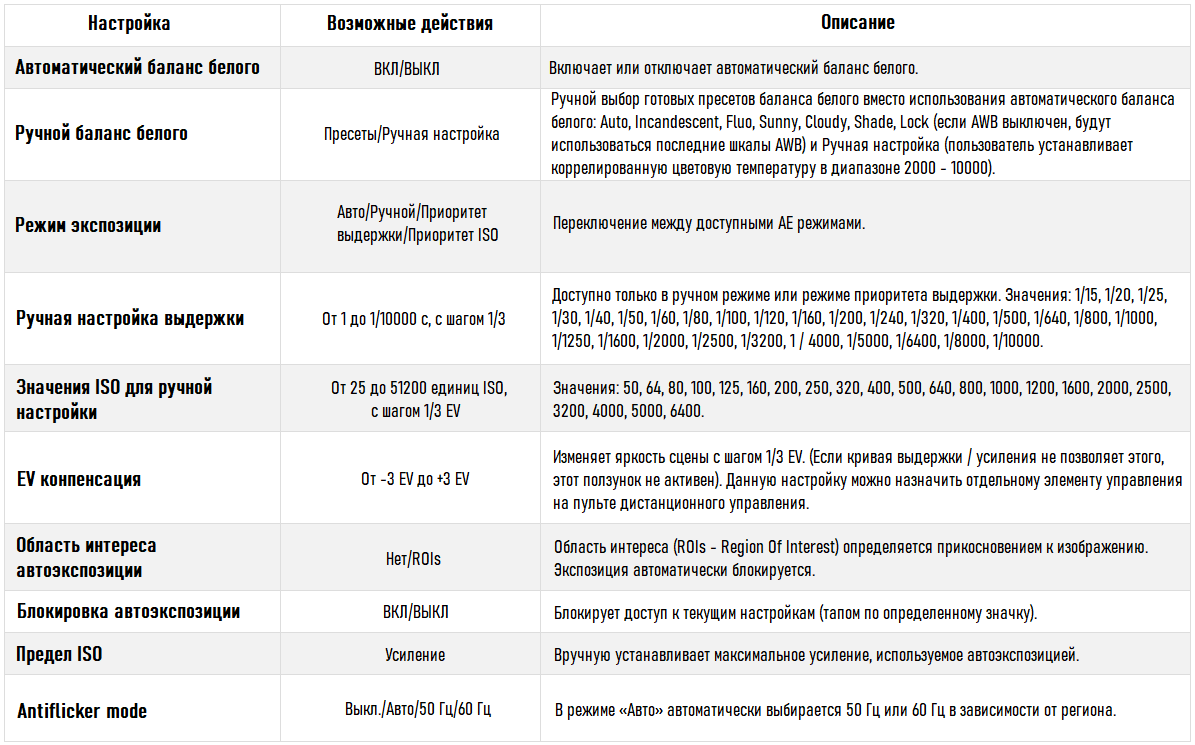
设置
在下面表列出了每种模式的可用设置。
6 倍变焦
变焦适用于所有照片和视频模式。结合 48 兆像素传感器,即使在使用 6 倍数码变焦时,精确的锐化算法也能产生高清图像。 ANAFI Ai 用户现在可以在 75m 外看到 1cm 的细节。高像素数还允许将 4K 视频裁剪到 1080p 而不损失质量。

混合稳定
ANAFI Ai 在微型无人机市场上拥有最准确的稳定。
它结合了组合稳定:
- 3 轴机械(3 轴机械。Gimbal)
- 电子 3 轴 (EIS)
无论无人机的飞行位置如何,机械稳定都能稳定相机指向轴。电子图像稳定器可校正机械驱动无法处理的 100 Hz 以上频率的微振动效应。
主相机万向节
机械稳定允许您在所有 3 个轴上稳定和定向相机视图的水平轴。
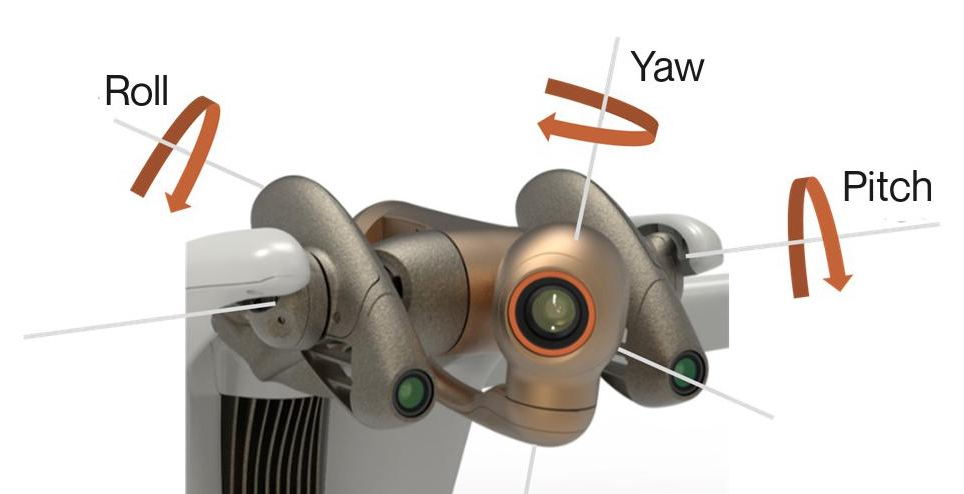 3 个旋转机械轴。暂停主摄像头 ANAFI Ai。
3 个旋转机械轴。暂停主摄像头 ANAFI Ai。
主要特性
- 主摄像头三轴机械云台
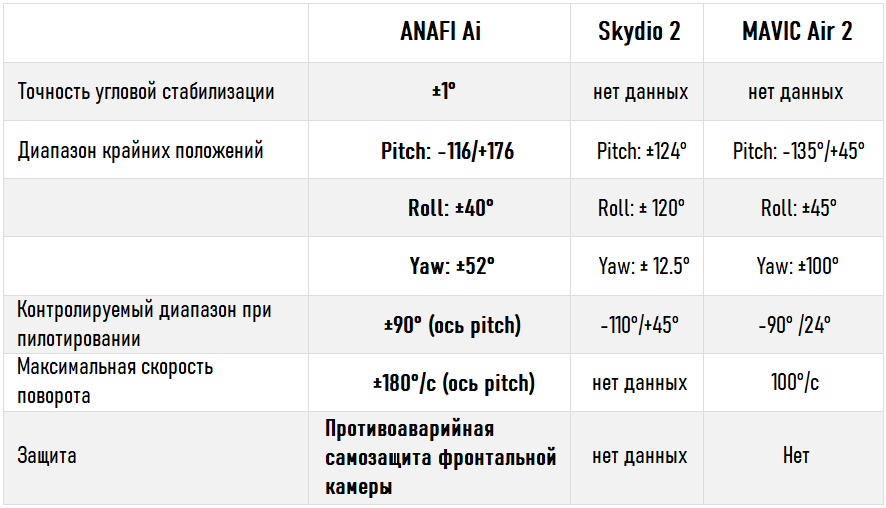
- 垂直偏移 292°,视野 -116° 至 176°
云台性能
- EIS 算法校正广角镜头抖动和失真的影响,并执行 3 轴数字图像稳定(滚动、俯仰和偏航)。
- 该方法在于应用图像的几何变换。由于 IMU,几何变换与时间戳和精确位置相关联。
- 根据所测量的相机单元的光学失真、振动和移动,将几何变换应用于每个图像。
枢轴范围 292°
摄像机围绕俯仰轴具有 -116° / 176° 的水平枢轴范围,从而提供无人机上方和下方的观察,这是一个市场上微型无人机的独特机会。
![]()
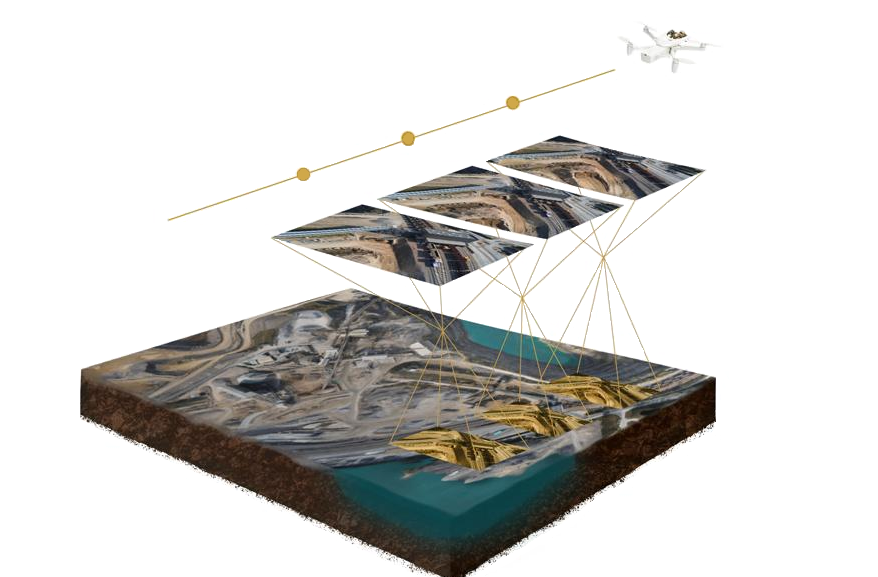
摄影测量
无人机航拍正在改变专家进行检查和测量的方式。摄影测量方法用于处理无人机收集的图像以创建 2D 和 3D 模型,以便客户在以后及时安排被测对象的维护。
4G 提供了前所未有的无人机数据链路可靠性。用户可以在大面积、靠近金属结构、建筑物的地方操作无人机,而不必担心失去通信。
测绘
通过将ANAFI Ai无人机的AI与PIX4Dinspect在线平台相结合,用户将能够进行比以往任何时候都更快、更有效地进行检查。或者。机器学习算法识别蜂窝塔上的天线,确定它们的大小、高度、倾斜度、方位角和垂直度。
点击下面的图片查看由 ANAFI Ai 生成的演示 3D 模型。
示例#1

示例#2
一流的矩阵
]ANAFI Ai无人机的相机配备了采用Quad Bayer彩色滤光片技术构建的48MP 1/2英寸CMOS传感器,比以往任何时候都更适合检查和摄影测量。使用的矩阵允许您获得具有宽动态范围的详细图像。
高分辨率照片
ANAFI Ai 能够生成 48 兆像素的静止图像,从而以高分辨率捕获所有细节并创建高密度点云。
显着锐度
检查任务需要能够识别细微的细节,例如序列号、连接器、锈迹和初期裂纹。
宽动态范围
标准模式下 10 档动态范围,HDR 模式下 14 档。最佳图像渐变对于创建一致的浊点和高质量 2D 或 3D 重建至关重要。
比 1 英寸传感器多 55%
ANAFI Ai 无人机的 48MP 1/2 英寸 Quad Bayer 传感器比许多使用的 20MP 1 英寸传感器更清晰现代专业无人机。以下来自ANAFI Ai和(805)DJI Phantom 4 Pro V2.0 相同高度的屋顶检查图像清楚地证明了这一事实。

非常适合检查
ANAFI Ai 云台包括一个 6 轴混合(机械电子)稳定系统,可补偿飞行波动并确保图像清晰度。 ANAFI Ai 相机的可调范围为 -90° 至 90°,使其成为观察桥基底部的理想机载仪器。
可控倾斜 ± 90 °
精度
ANAFI Ai 允许用户从 30 m 的高度实现 0.46 cm/px 的 GSD,这意味着平面测量的相对精度高达 0.92 厘米。
相比之下,在相同高度 下,DJI Phantom 4 Pro V2 提供的 GSD 仅为 0.82 厘米/像素。换句话说,ANAFI Ai 可以映射同一个目标,飞行高度是 Phantom 的 1.5 倍以上,具有同等的细节水平。
AI 和 4G 功能
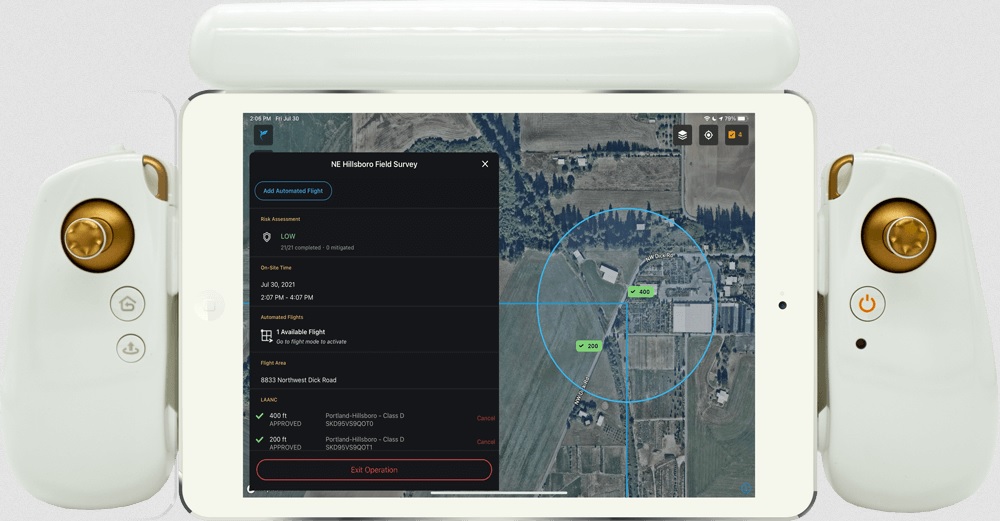
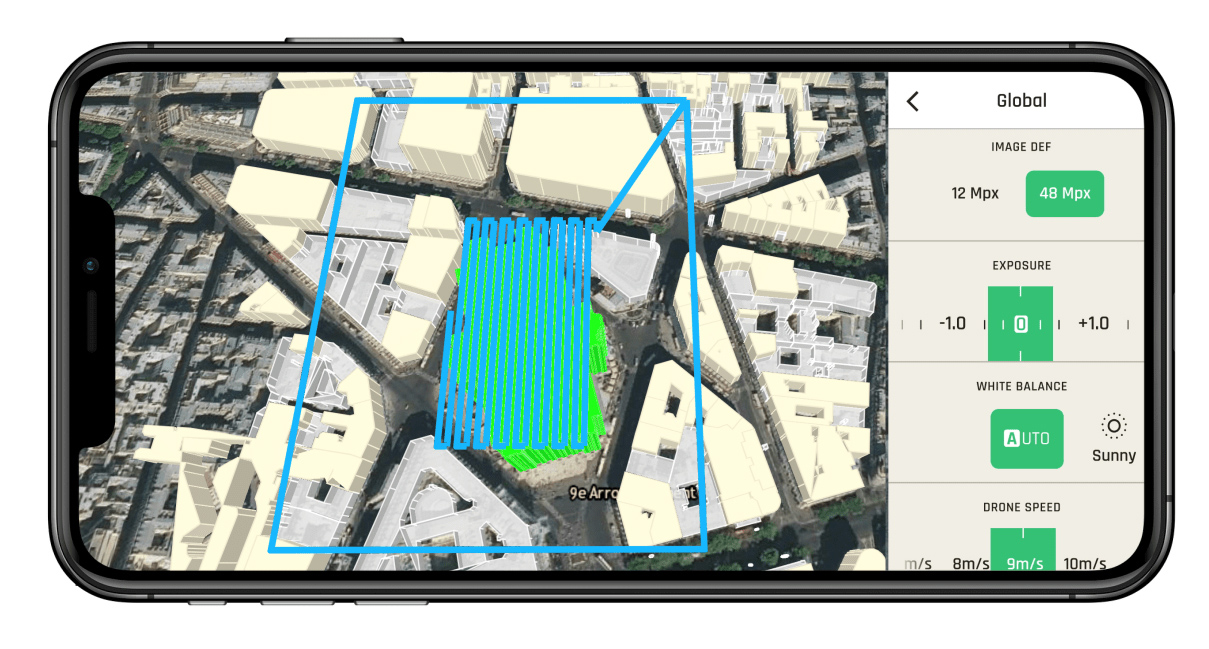
一个应用程序。任何飞行计划
FreeFlight 7 移动应用程序的潜力允许用户启动所有测量、检查和摄影测量任务。

可用的摄影测量飞行模式
FreeFlight 7 移动应用程序现在提供以下摄影测量飞行模式:
- Grid
- 双格
- 通告
一键创建飞行计划
FreeFlight 3D 交互式地图一键即可完成用于快速扫描建筑物。人工智能自动确定最佳飞行参数和轨迹。带有精确地理参考的 ANAFI Ai 传感器(IMU、GNSS 和飞行时间)的 48MP 图像可实现精确的 3D 重建。
 在 3D 土地登记处一键创建自动飞行计划。
在 3D 土地登记处一键创建自动飞行计划。
- FreeFlight 7 的制图背景来自 ArcGIS 软件。 3D 建筑表示基于覆盖世界各地城市的 OpenStreetMap 数据。
- 可视化系统确保给定飞行计划的安全性:用户无需担心障碍物。 ANAFI Ai 自动避开它们。
自主飞行
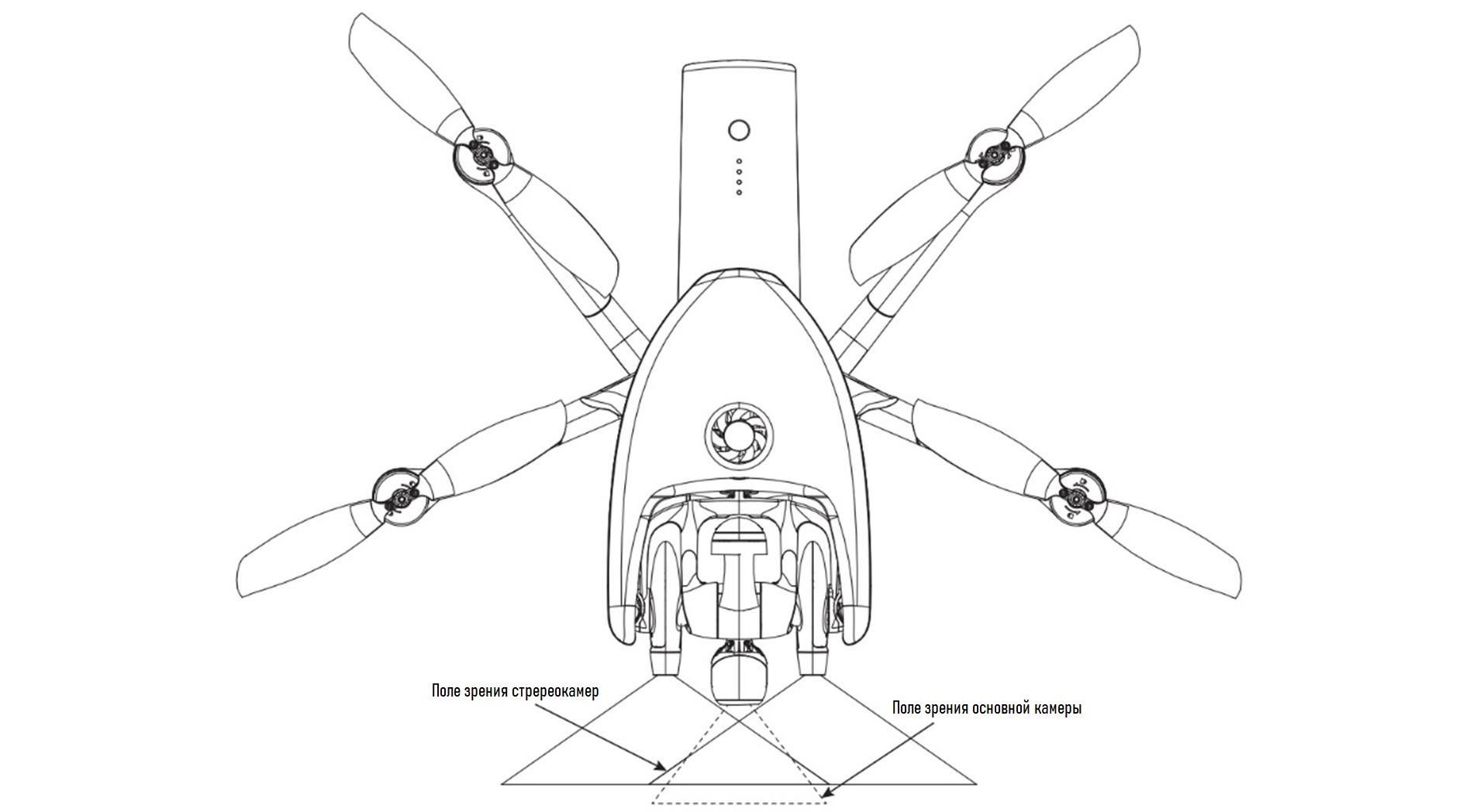
ANAFI Ai 全向传感器系统基于立体视觉,自动将自身定向在行进方向。

无人机检测30米外的障碍物,AI技术在执行给定的飞行计划的同时不断构建和更新填充网格。它以体素表示无人机环境。
算法确定最佳轨迹以避免与障碍物相撞,同时无人机保持专注于其目标:指定的飞行任务。

4G 连接
ANAFI Ai 是第一个配备 4G 模块的商用 microdron。它覆盖了全球 98% 以上的使用频率。

高压电力线调查。使用 ANAFI Ai 拍摄,使用 Pix4Dmatic 编辑。场景尺寸:4060 × 60 × 70 m。图像数量:2172。GSD:1.3 cm/pix。高度:90 m。正面/侧面重叠:90%/65%。
无人机能够从 Wi-Fi 无缝切换到 4G,反之亦然,从而提供最可靠的连接,从而保证:
- 执行 BVLOS 飞行
- 即使在有障碍物和建筑物的环境中飞行也能稳定连接
- 在高噪音环境中安全飞行
- 视频链接质量 1080p @ 30 fps
- ) 将图像直接上传到云服务器

飞行时间优化
据开发人员称,由于高ANAFI Ai 图像的性能:
- 48MP 使无人机的飞行速度比配备 20MP 1 英寸传感器的无人机高 1.5 倍以上,同时实现相同的 GSD。换句话说,更高的高度和更快的任务是相辅相成的。
- 1 fps 摄影:ANAFI Ai 的拍摄速度是 Autel EVO 2 和 DJI Phantom 4 Pro V2.0 的两倍。
4G 飞行中传输到 PIX4Dcloud
在从无人机航拍照片创建数字模型、传输文件和处理的过程中照片是两项耗时的任务。 ANAFI Ai 帮助用户加快工作流程。特别是,无人机系统允许:
- 使用无人机的 4G 连接在飞行中直接将图像传输到安全服务器。
- 在飞行结束时立即开始计算对象:正射镶嵌、点云、高程模型和纹理网格。
- 与员工和客户轻松共享 2D 地图和调查质量 3D 模型。
![]()
PIX4D 套件兼容性
ANAFI Ai 现在完全兼容一套独特的移动、桌面和云摄影测量应用程序,包括:
摄影测量或激光雷达
为什么选择摄影测量进行勘测和勘测?除了可访问性和易用性之外,当需要对数据进行目视解释时,航空摄影测量是最佳选择。
摄影测量专家
- 提供多种可视化:正射镶嵌、彩色点云、纹理网格。
- 创建具有更高密度的点云,每个点都包含大量信息(高度、纹理、颜色)。
- 在逼真的 2D 和 3D 渲染精度上超过 LIDAR - LIDAR 不提供高水平的上下文细节。
LIDAR 缺点
- 成本是带有 RGB 矩阵的无人机的 100 倍。
- 数据处理的复杂性和可能的解释错误。
- 添加颜色信息是可能的,但它使过程复杂化。
- LIDAR 仅生成点云,适用于特定情况和情况。
SDK
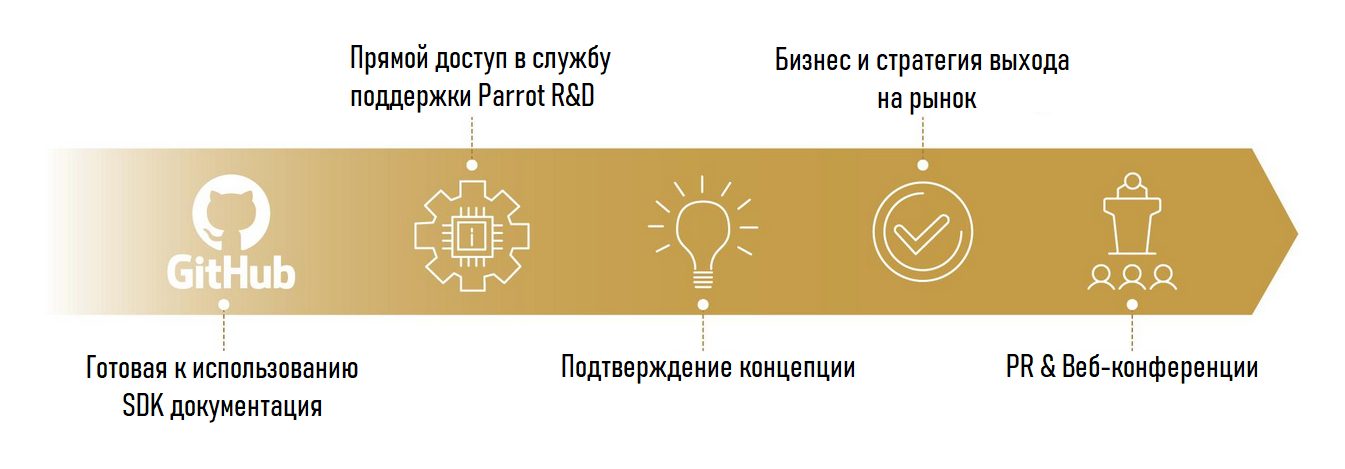
Parrot 软件开发工具包是一套面向开发人员的开源工具和软件。自从第一架无人机 A. R. Drone,该公司的开源软件支持开发者平台和工具,并且 Parrot
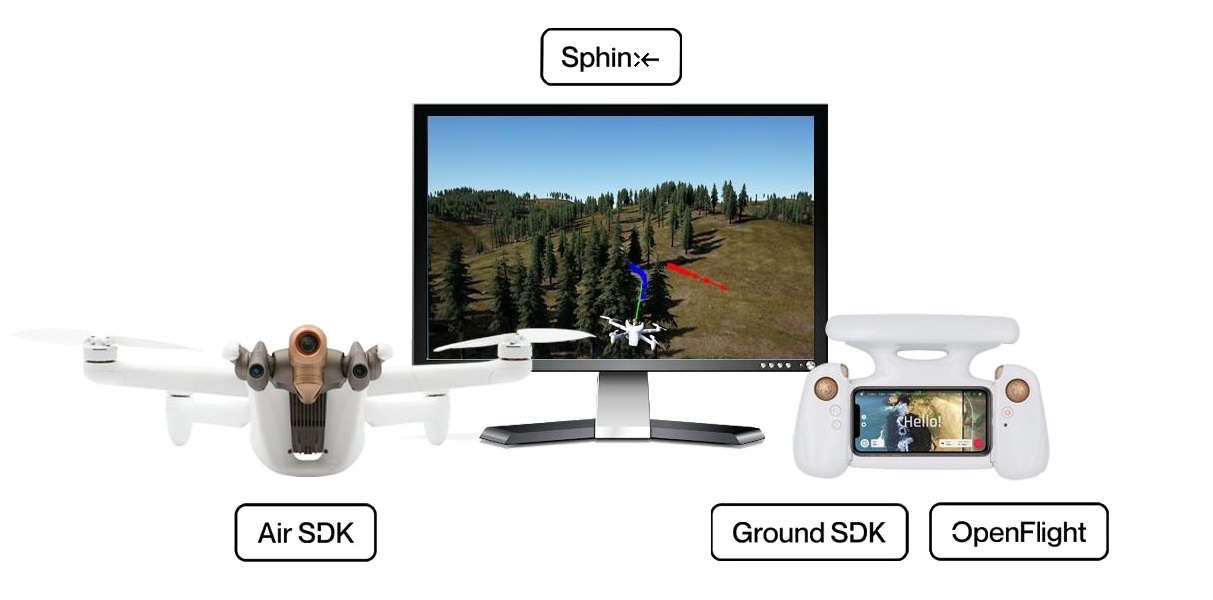
开发者在门户网站“ 鹦鹉开发者门户 ”...您还可以在 Parrot 论坛 上加入成千上万的开发人员,在那里您可以直接与公司的工程师讨论当前的话题。
Air SDK
在 ANAFI Ai 上运行您的代码
Air SDK 提供了一种革命性的技术架构来下载和运行代码直接在ANAFI Ai。开发人员可以通过访问所有无人机传感器、连接接口和自动驾驶仪功能,对定制设计的飞行任务进行编程。
Air SDK 提供机载访问:
- 所有传感器(IMU、GPS、TOF)和飞行模式
- 视频流和元数据与所有相机
- 通信接口 Wi-Fi、4G、USB
- 深度图和填充网格
- 创建避障轨迹
任何开发人员都可以:
- 通过创建飞行任务来改变无人机的状态
- 改变导航模式
- 添加嵌入式 Linux 进程(用于例如,通过 4G 通道传输数据或使用计算机视觉)
Air SDK 支持 C 或 Python 编程语言。 Air SDK 附带详细的安装指南和 API 文档。许多应用示例说明了其独特架构提供的所有可能性。
Ground SDK
构建强大的移动应用程序
Ground SDK 是地面控制站 (GCS) 软件平台适用于移动设备(支持 iOS 和 Android)。它允许任何开发人员为 ANAFI Ai 创建一个移动应用程序,以便随后直接从移动设备控制无人机。所有 BVS 功能(控制、视频、设置)均可通过易于使用且完整记录的 API 获得。
OpenFlight
开源地面控制站
Parrot 首次公开其地面控制站应用程序的源代码。 OpenFlight 是我们著名的开源 FreeFlight 7 应用程序的核心。这使开发人员可以专注于添加自己的功能,并立即准备好发布到 AppStore 的具有专业外观的应用程序。

OpenFlight 包含:
- 所有 UX FreeFlight 7
- 所有界面设置
- 障碍物实时 3D 可视化代码
- 管理 4G 通信的代码
- OpenFlight 在 BSD-3 许可下发布,具有完整的安装指南和全面的文档。
Sphinx
3D 逼真模拟
Parrot Sphinx 是一种先进的无人机模拟工具。 Parrot 工程师使用它来开发和测试所有 ANAFI Ai 功能。一般概念是在视觉和物理现实环境中模拟无人机及其所有传感器的实际固件。

Parrot Sphinx 允许:
- 模拟所有相机和传感器
- 模拟深度图和分割图像
- 导航许多逼真的 3D 场景
- 连接到不同类型的遥控器
- 使用脚本控制模拟
- 添加行人和车辆
- 可视化和记录飞行数据
- 调整飞机传感器和周围的物理元素
- 控制实时因素
Parrot Sphinx 建立在先进标准的基础上组件:
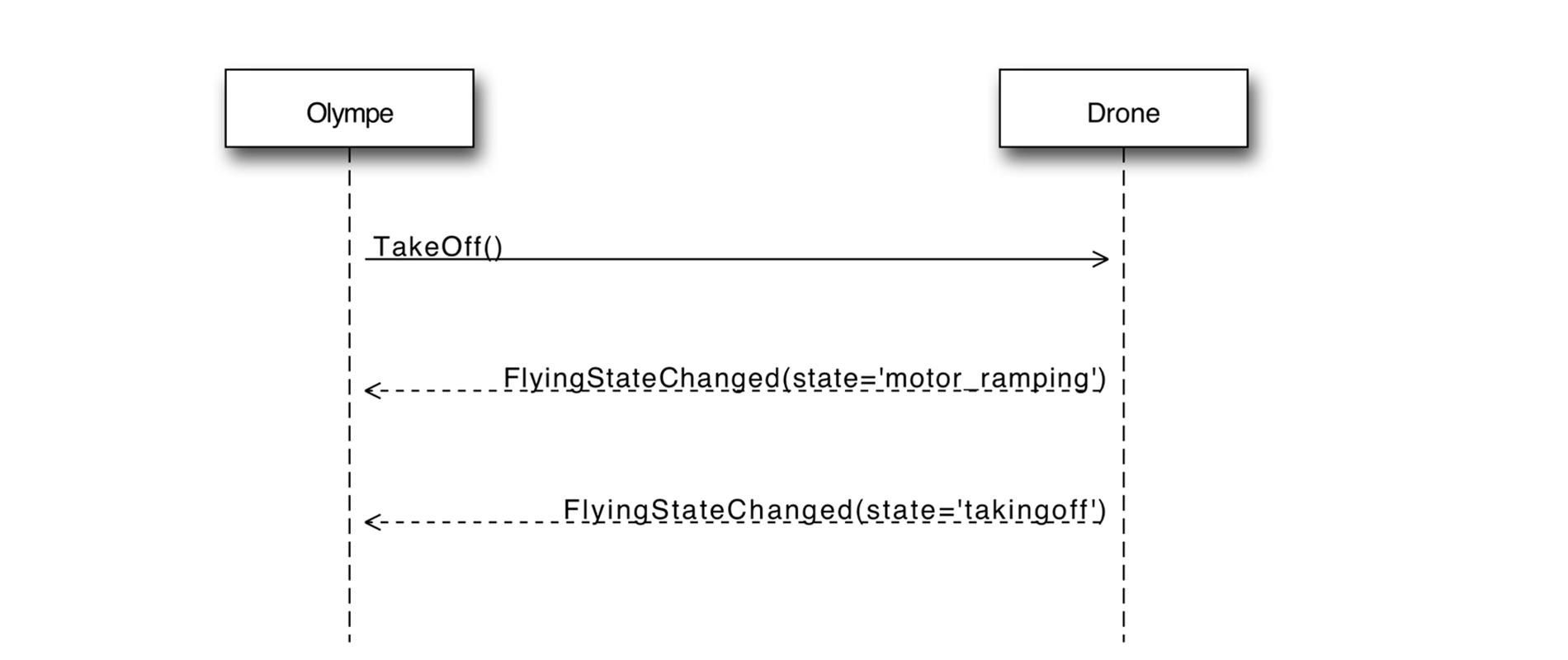
Olympe
Python 控制ANAFI Ai
Olympe 为ANAFI 提供Python 控制器编程接口艾。 Olympe 的最初目的是与 Sphinx 建模环境交互。 Olympe 还可以从远程计算机控制物理 ANAFI Ai。
Olympe 框架允许:
- 连接到模拟或物理 ANAFI Ai
- 发送命令消息(驾驶、相机方向、返回家园, Flight Plan)
- 开始和停止来自所有摄像机的流视频
- 记录视频流和同步元数据
) PdrAW
高级媒体播放器
PDrAW 是 ANAFI Ai 媒体的高级视频查看器。该查看器支持 Linux、macOS、Android 和 iOS 平台上的流媒体 (RTP / RTSP) 和录制 (MP4) 视频。 PDrAW 是一个库 (libpdraw)、一个包装库 (libpdraw-backend) 和一个独立的可执行文件 (pdraw)。
PDrAW 还管理视频元数据。在 ANAFI Ai 上,流媒体和录制的视频都包含公开可用和记录的元数据,从而允许进行高级航拍视频处理。
型号 C. A. D.
Parrot 提供其无人机的 3D 模型,用于集成到您的 CAD 设计中,以实现快速原型制作和配件集成。
MAVLink 和 GUTMA 兼容性
ANAFI Ai 兼容标准开源 MAVLink v1 协议,允许无人机和控制站之间进行实时数据交换。 ANAFI Ai 可以手动控制,也可以使用来自 MAVLink 兼容基站(例如 QGroundControl)的自动飞行计划进行控制。 【999】
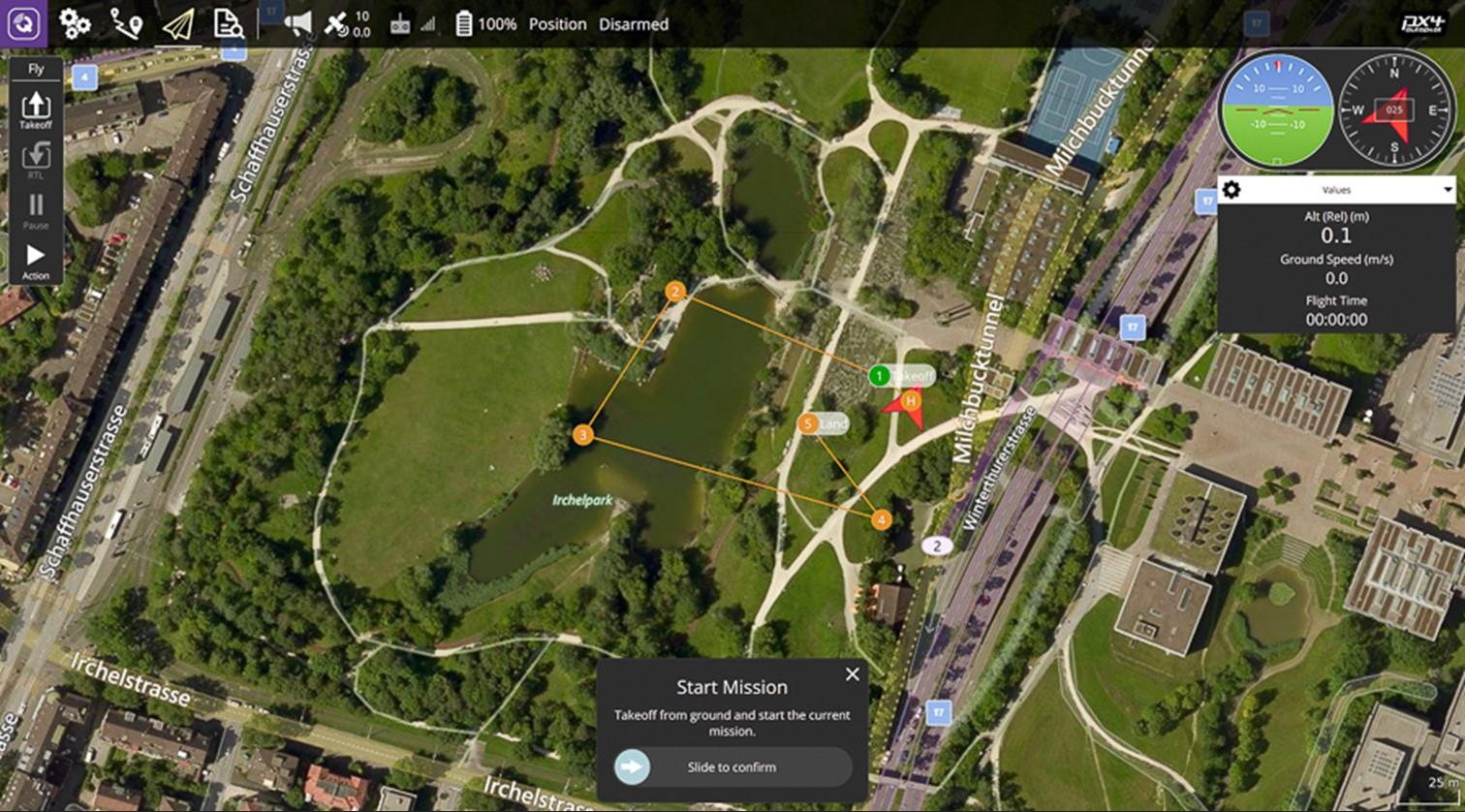 【1000】
【1000】
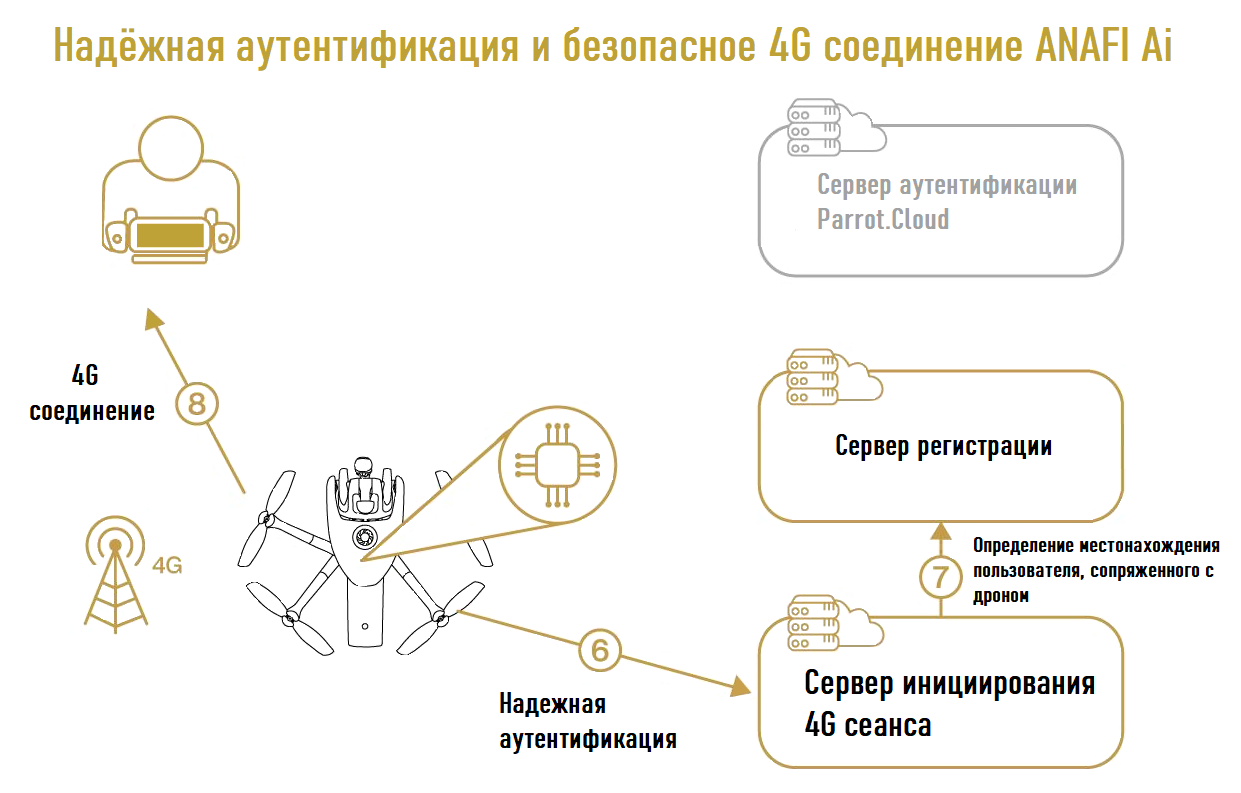
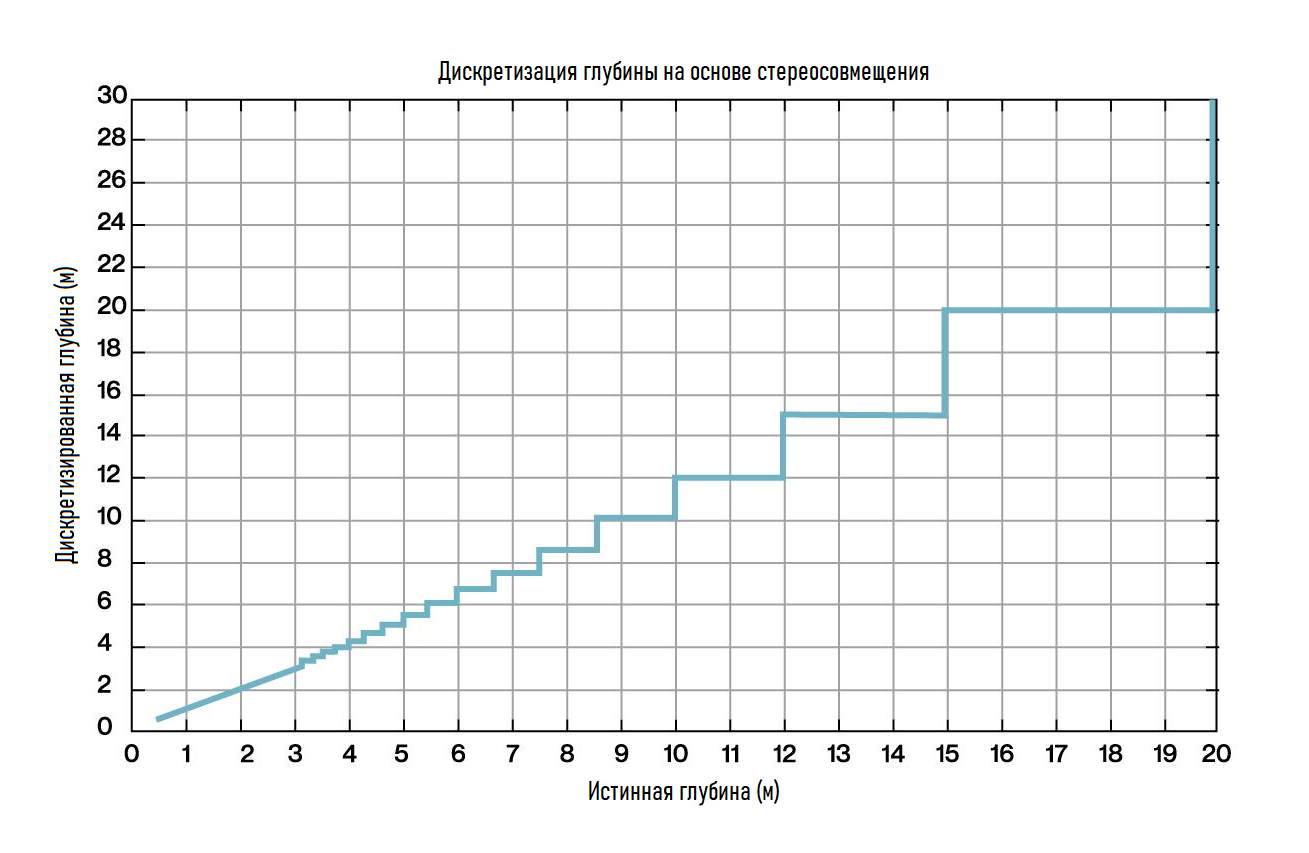
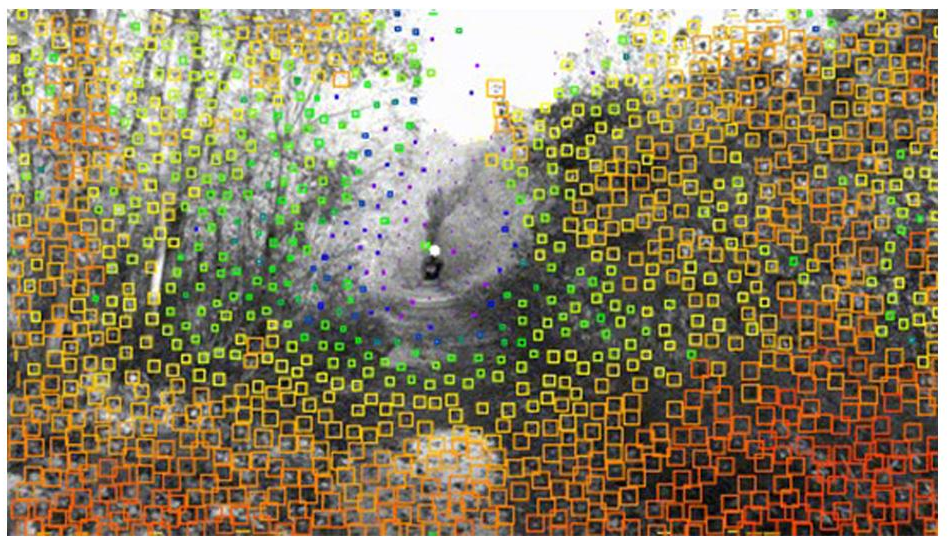
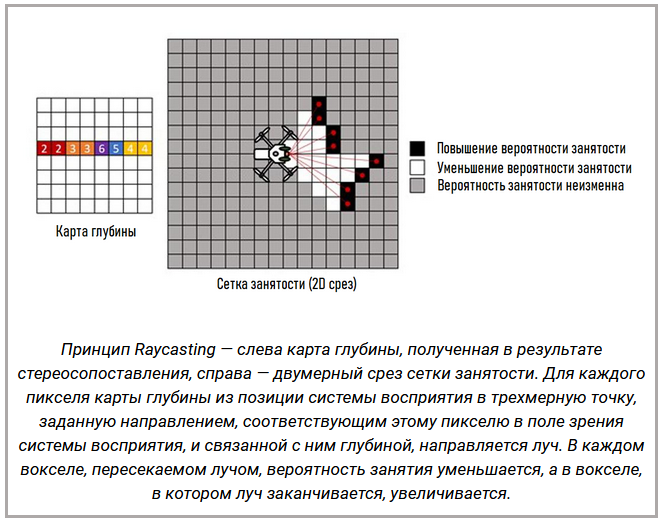
*QGroundControl接口【1003】【1002】 ANAFI Ai兼容GUTMA开源标准飞行数据协议。全球 UTM 协会是由空中交通管制领域的主要参与者组成的联盟。 Parrot 通过其合作伙伴 SDK 计划继续扩展无人机软件提供商的全球生态系统. 为专业用户不断增长和不断变化的需求提供专业和独特的解决方案。 为了充分利用检查过程,Parrot 为其客户提供了一个兼容无人机软件的生态系统,包括机队管理、编译飞行计划和导入飞行日志,在拍摄、映射、监控和分析接收到的数据之前。 2D/3D 建模应用。一组独特的移动、桌面和云摄影测量应用程序。 美国4G LTE 无人机解决方案。第一款 ANAFI Ai 机器人无人机通过预装 Skyward 软件连接到 Verizon 4G LTE 网络。为近乎实时的数据传输、远程部署和视线外飞行开辟了道路。 ANAFI 能力范围内的整合和学习。航空管理平台,包括空域、LAANC 访问以及用于企业无人机机队部署的培训、设备和连接。 构建、管理和扩展您的无人机程序。公共安全领域的无人机专业人员可以使用全套 DroneSense 功能,专为满足急救人员的需求而设计。 开发者提议扩展他的无人机程序通过集成他们的 SDK。 开发者注明不收集未经用户同意的任何数据。是否将数据传输到 Parrot 基础设施的决定完全取决于用户自己。 Parrot 中托管的数据允许用户在不同设备之间同步飞行数据和飞行计划,并促进支持并使 Parrot 能够改进其产品。 ANAFI Ai 遵守欧盟通用数据保护条例(GDPR),更进一步,例如允许您一键删除所有数据,从而为用户提供最简单的控制。此一键式问题已在 FreeFlight7 移动应用程序或 Parrot. Cloud 帐户的隐私设置中解决。这样,用户不仅可以随时停止交换数据,还可以轻松请求删除数据。 如果用户同意交换数据,他们的处理将以完全透明的格式进行,详细描述见 Parrot 隐私政策。 当 ANAFI Ai 通过 4G 连接到 Skycontroller 4 时,Parrot 基础设施用于配对无人机和遥控器。如果用户没有登录 Parrot. Cloud 帐户,他仍然可以使用唯一的临时帐户使用 4G 连接。当使用 Parrot 的基础设施进行 4G 配对时,视频使用无人机和遥控器之间商定的密钥加密,Parrot 无法访问未加密的视频。 ANAFI Ai 具有符合 NIST 的内置 Wisekey 安全元件FIPS140-2 3 级和通用标准 EAL5 认证。 Skycontroller 4 控制硬件中也内置了类似的安全元件 安全元件功能: 它使用 ECDSA 私钥和域参数 P521,每个无人机都是唯一的。它无法从安全元素中提取。与此密钥关联的证书由证书颁发机构签名。 Wisekey 保护固件的完整性,为 4G 配对和强认证提供唯一的无人机识别,以及无人机拍摄的照片的唯一数字签名。 安全配对设备的过程。在此过程中,用户可靠地确认他已连接到特定的无人机。感谢ANAFI Ai Secure Element,他无需在无人机内部输入密码即可完成此操作。 Parrot 服务器然后注册用户和无人机之间的通信。当用户与无人机的Wi-Fi连接丢失时,ANAFI Ai会自动切换到4G连接。 ANAFI Ai 使用其存储在安全元件上的私钥在 Parrot 服务器上执行强身份验证。 Parrot 服务器寻找连接的用户并提供 ANAFI Ai 和 Skycontroller 4 之间的接口。 为了保护进入 Skycontroller 4 的无人机控制和视频流,ANAFI Ai 支持 TLS、DTLS 和 SRTP 协议。 飞机启动顺序受到保护:系统检查它使用 Parrot 软件并且该软件未被篡改。每次初始化都会执行安全检查。更新服务还控制软件更新的数字签名。 ANAFI Ai 用户可以访问特殊操作员帐户安全元件。此帐户用于设置与此用户相关的密钥。用户可以使用他们信任的任务提供者的公钥配置安全元件。 ANAFI Ai 只会执行使用这些密钥签名的任务。此过程可防止攻击者在无人机上执行恶意飞行任务。 来自 ANAFI Ai 的安全元件可以对无人机图像进行数字签名。该签名证明: 换句话说,数字签名保护与图像相关的所有数据,包括拍摄的地点和时间,以及哪个 ANAFI Ai 无人机。 使用无人机摄影提供软件解决方案的用户和合作伙伴可以使用无人机证书或通过 Parrot 提供的公钥目录来验证 ANAFI Ai 照片的数字签名。 Parrot 尽可能使用标准协议和文件格式。没有混淆的代码或隐藏的功能。这使用户能够了解 Parrot 产品的工作原理并测试其安全性。此外,用于控制无人机的软件 OpenFlight 是开源的,可以让用户完全控制。 2021 年 4 月,Parrot 与欧洲首个众包安全平台 YesWeHack 一起推出了漏洞赏金计划。通过此次合作,Parrot 利用 YesWeHack 庞大的网络安全研究社区来识别其无人机、移动应用程序和网络服务中的潜在漏洞。 私人计划最初为选定的安全研究人员提供独家访问权限,并包括未来的 Parrot 无人机模型。研究人员的经验和多样化的技能将在产品上市前确认产品的高度安全性,这将有助于提高 Parrot 用户的安全性及其数据的保护。 在第一轮私人漏洞赏金计划和商业化之后,产品进入公共计划。然后,他们的安全性由超过 22,000 名网络安全研究人员组成的整个 YesWeHack 社区进行严格审查。 Parrot Cloud 允许选择共享数据的用户管理航班和机队数据以及多媒体他们的无人机接收到的数据。 Parrot Cloud 收集4 类数据: Parrot 仅收集和使用同意共享数据的客户的数据,以提高质量其产品... 预防性维护: 我们的工具收集与任务相关的所有信息(任务类型、起飞和着陆时间、任务数量、无人机位置、飞行速度、飞行计划和 AirSDK 设置)。这使您可以实时接收有关 ANAFI Ai 无人机机队(及其控制器和电池)状态的准确信息。 纠正性维护: 收集的信息对于快速确定特定无人机或电池的状态很有用。 ANAFI Ai 的 AI 元素(PeleeNet、卷积网络等)为用户提供无与伦比的服务和功能:避障,目标跟踪,多种飞行模式。 AI 的质量取决于收集到的数据(图像和视频)的数量和质量:这些数据为机器学习提供动力。在这方面,数据质量并不是唯一的决定性因素:与这些数据相关的元数据也是基础。因此,我们的工具会根据事件定期收集图像和元数据,总计每分钟 30 到 50 MB。 具有类似座头鲸的前缘鲸鱼的新型仿生螺旋桨叶片。这种方法可以提高动力装置的推进效率,在输出端提供相同转速下的推力增加。这种效果相当于转子直径的增加。 从前缘发出的声学噪声,尤其是音调噪声也降低了。因此,ANAFI Ai [1 m 处的 71.5 dB SPL (A)] 比 Skydio 2 [1 m 处的 76.4 dB SPL (A)] 更安静。 确保安全飞行ANAFI Ai配备:【1165】(1166)(1167)2×IMU(ICM-40609-D和ICM42605)【1167】(1168)磁力计LIS2MDL【1168】(1169)GPS模块UBX-M86930【1】 1170) TI OPT3101 飞行时间 (ToF) ANAFI Ai 飞行控制器提供简单直观的驾驶:无需培训即可操作。它允许您自动执行多种飞行模式(飞行计划、摄影师、手动起飞、智能 RTH)。传感器融合算法结合来自所有传感器的数据来估计 ANAFI Ai 比率、高度、位置和速度。 状态评估对于无人机的正常运行至关重要。当飞行控制器与开环一起使用时,四轴飞行器本质上是不稳定的;为了轻松控制它们,更不用说自主控制了,有必要使用闭环控制算法来稳定它们。这些算法计算并向 ANAFI Ai 所需的电机发送命令,以实现所需的轨迹。 在没有 GPS 信号的情况下,ANAFI Ai 主要依靠垂直相机测量来估计速度和位置。垂直相机的性能由两种主要算法决定: 垂直相机由于 ANAFI Ai 配备了一对位于垂直相机旁边的 LED 灯,因此算法可以在低光照条件下工作。它们可以让无人机保持稳定,尤其是在室内飞行或没有 GPS 的情况下,距离地面不到 5m 的高度。 LED 灯的功率会自动适应,具体取决于算法的需要。 本章详细介绍了 ANAFI Ai 用于实现自主飞行的传感器、硬件和算法。它的组织如下: 对三维环境的感知是实现自主飞行的关键能力,尤其是在密闭空间。它是保证检测和避开障碍物的先决条件,可以减轻无人机操作员的负担,提高任务成功率并确保飞机的安全。 释放飞行相机的全部潜力,它可以不受限制地在各个方向自由移动和旋转,需要有效的传感解决方案。特别是,传感系统应该能够在与飞行中向前运动相对应的方向上接收有关环境的信息 - 无论相机的方向如何。 ANAFI Ai 依靠基于两个机械云台的独特技术方案来分离主摄像头和传感系统的方向: 两个吊架的倾斜轴共线并组合以实现超紧凑设计。 由于这种解决方案,可以将主摄像头和传感系统指向两个不同的方向。这种设计避免在无人机的侧面、顶部、底部和后部使用昂贵的摄像头,同时仍为传感系统提供大的可用视野。 本节的组织如下: 传感系统基于一对具有一个俯仰轴的相同相机... 主摄像头机械云台为三轴机械俯仰l-yaw》具有以下特性: 传感系统的机械悬挂是具有以下特性的单轴悬挂: 传感系统有 311° 行程(其中 296° 未被无人机身体遮挡),允许向后感知。 瞬时垂直视野和感知 ANAFI Ai 的限制系统。 当向后倾斜时,感知系统移动到最高位置,从而提供清晰的视野。 ANAFI Ai 处于完全倾斜位置以向后飞行的感知。 自主飞行周边三维环境重建分两个阶段进行: 使用两种方法从感知传感器获取深度图: 提取深度的主要方法信息基于感知系统的两个立体相机之间的视差。通过从一个方向,但从两个不同的位置拍摄环境,感知系统视场中的物体出现在两个摄像头获得的图像中的不同位置。主体越近,位置差异越大。 因此,策略是确定左右立体相机在传感系统的视场中对应于同一物体的图像中的点,并测量这些点的位置差异两个图像中的点。这种差异称为视差,以像素数衡量。 然后可以使用以下关系将视差与这些点中的每一个的深度相关联深度 = 焦点 * 基线 / 视差,其中深度和基线以相同的单位表示,焦点长度和视差以像素数表示。 计算结果采用176×90像素的深度图形式,其中每个像素的值对应于以米为单位的深度。深度图以 30 Hz 的频率刷新。 ANAFI Ai 传感系统右侧摄像头拍摄的图像示例(左)以及使用立体成像获得的相应深度(右)。颜色图从红色(更近)到紫色(更远) - 白色意味着无法到达。 这样做的直接结果是,用这种方法测量的深度是离散化的,因为视差只能取离散值(像素数)。距离感知系统足够远并产生小于一个像素的理论视差的 3D 点将被认为是无限的,因为相应的实际离散视差将等于 0。立体比较方法的精度随着距离的增加而降低,尽管有是可以通过实现亚像素采样来减少这种现象的方法。 此外,视差随着深度接近零而发散。由于图像中像素的数量是有限的,因此视差值也是有限的。因此,存在感知系统失明的最小深度。 ANAFI Ai 的最小深度为 36 厘米。 关于校准: 每对立体相机都经过工厂校准,以准确测量两个相机之间可能存在的微小差异,并在机载深度计算中对其进行补偿。 用户还可以使用无人机提供的测试模式重新校准一对立体相机。特别是,在某种程度上,无人机能够检测其生命周期中可能出现的潜在校准错误。在这种情况下,飞行器软件会尝试对其进行调整和补偿,如果失败,则会出现通知要求您重新校准。 无人机的运动还可用于从不同角度收集环境图像,从而重建深度信息。这种技术被称为运动深度,或单目感应,因为单个移动相机足以收集深度信息。 操作原理类似于立体视觉,但不是比较不同观察者同时获得的环境图像,感知比较同一观察者在不同时间获得的环境图像。如果无人机在移动,那么来自这个独特观察者的图像将从不同的角度被捕获。知道每帧拍摄的位置,就可以对不同图像中与相同特征对应的点进行三角测量并将它们返回到 3D。 输出是一个三维点云,包含多达 500 个 ANAFI Ai 点,以 10 Hz 的频率生成。 ANAFI Ai 运动深度算法通常比立体匹配算法生成更少的信息(稀疏点云),并且需要无人机移动以收集信息。此外,该算法无法在准确的运动方向(至少对于直播)提取信息,因为图像中的对象在这个方向上看起来几乎是静止的(扩展焦点)。 然而,它比立体匹配具有更好的检测范围(理论上无限范围)。 来自立体和单目传感算法的深度信息被集成到填充网格中。该网格将 3D 环境采样为称为体素的 3D 立方体。每个体素都被分配了被障碍物占据的概率,或者相反,没有障碍物的概率。 光线传输算法用于将深度信息集成到填充网格中。对于立体比较得到的深度图的每个像素点,转化为三维点,对于点云的每个点——转化为运动得到的深度: 因此,网格充当深度信息的时间过滤器,吸收深度测量中的任何潜在噪声,并作为先前测量的存储器,允许即使没有感知系统的连续 360° 视野,您也可以在困难的环境中导航。 填充网格是 ANAFI Ai 用于自主飞行和避障的运动规划算法的基础。 由于对存储在填充网格中的无人机 3D 环境的了解,ANAFI Ai 可以避开障碍物。这为自主任务提供了显着的额外安全性,但对于手动飞行也很有用,尤其是在飞行员和无人机之间的视线受损的情况下。 每 30 毫秒 ANAFI Ai 预测未来的名义短时间范围是什么。该预测是从用户提交的链接中推断出来的,无论它们是来自遥控器的飞行命令、附加到飞行计划的航路点,还是输入轨迹。然后,使用模拟的内部无人机模型,重新调度算法计算对该预测标称轨迹的最小可能修正,使其无碰撞且对无人机可行。 ANAFI Ai 避障系统的设计运行速度高达: 在下雨或强风、弱光或卫星导航中断的情况下,避让性能受到限制。此外,在飞行前,您必须确保感应系统的镜头是干净的。 空中SDK(见。SDK 部分)允许开发人员访问每个无人机传感器、摄像头、连接接口和独立功能。因此,他们可以自定义无人机的行为来创建飞行任务。每个飞行任务包含一组基本行为或模式: 自定义飞行任务可以创建新行为或从默认任务中重用它们。 ANAFI Ai 无人机计划于 2021 年 9 月开始销售。目前价格信息尚未披露。我们将继续监视传入的信息,并且一定会在以后更新此部分。 开发人员熟悉产品的文档: 开箱和首次飞行。 在具有 4G 连接的范围内试飞无人机。总飞行时间为 29 分钟,平均水平飞行速度为 58 公里/小时(16 米/秒)。在此期间,无人机能够覆盖 27 公里。您还可以注意到飞行是在强风条件下进行的,无人机系统会不断发出警告。
最大的无人机合作伙伴生态系统 Parrot
Parrot 满足各种业务需求
PIX4D × Parrot
Verizon x Skyward x Parrot

Skyward × Parrot

DroneSense × Parrot

Parrot Ecosystem Partners

Parrot Affiliate Program
网络安全
数据保密

符合 FIPS140-2 和 CC EAL5 安全元件

4G 安全连接和强认证
安全初始化和更新
在安全元件上配置用户密钥
数字签名照片

透明度和持续安全检查与漏洞赏金
漏洞赏金计划包括两个阶段:

数据管理
收集的数据
静态(产品数据):
事件
“上下文图像”
遥测
]
收集数据的最终用途
维护管理
增强人工智能 (AI)
飞行特性
空气动力学特性
驱动和空气动力学
 ANAFI Ai 螺旋桨叶片的 CFD 图像
ANAFI Ai 螺旋桨叶片的 CFD 图像  ANAFI Ai 光束的 CFD 图像
ANAFI Ai 光束的 CFD 图像 传感器
传感器特性[11753] (11753))
Flight IMU: ICM-40609-D
磁力计:LIS2MDL
]气压计:LPS22HB 1
GNSS:UBX-M8030 1
垂直摄像头
ToF:TI OPT3101
垂直相机 IMU:ICM-42605
自动驾驶仪

室内飞行
自主飞行
主要特点

感知系统策略
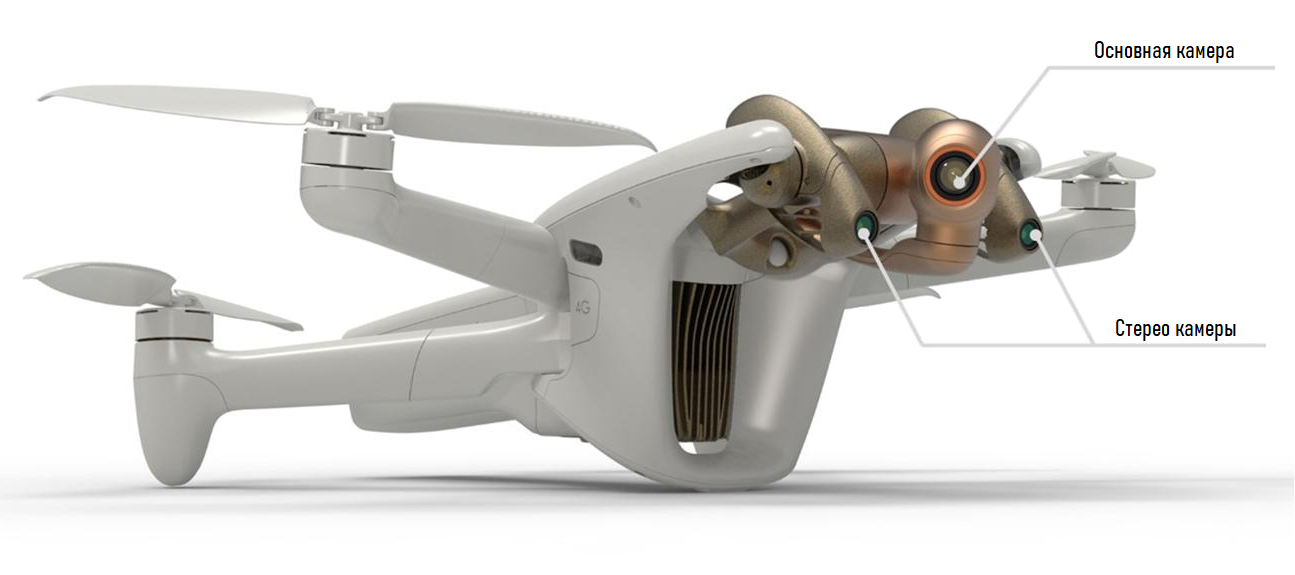 ANAFI Ai 双稳定器,用于感知和可视化。
ANAFI Ai 双稳定器,用于感知和可视化。 传感器
 用于 ANAFI Ai 传感系统的 1 轴机械铰链。
用于 ANAFI Ai 传感系统的 1 轴机械铰链。 传感器规格如下:
规格立体对如下:

双云台
系统的设计方式是:
 ANAFI Ai 感知系统的水平视野。
ANAFI Ai 感知系统的水平视野。 
环境重建
立体对应的深度
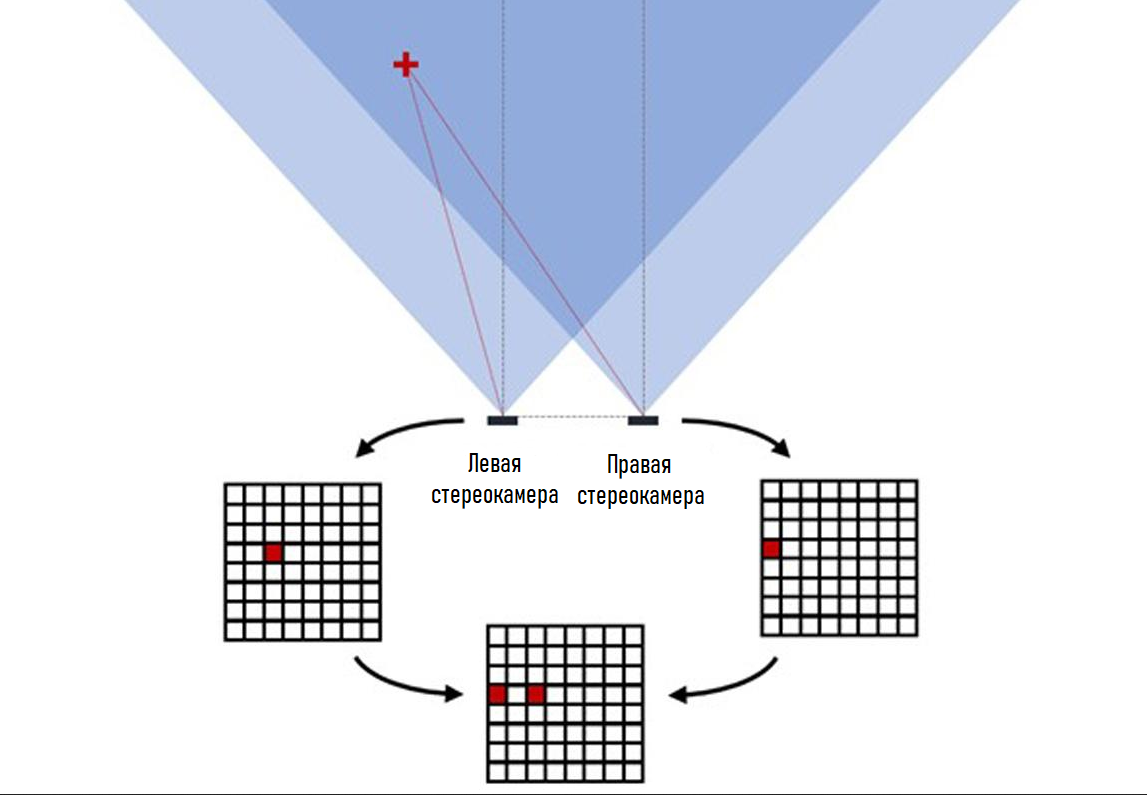 立体视觉原理图解——红色3D点在左右图像的不同位置。
立体视觉原理图解——红色3D点在左右图像的不同位置。 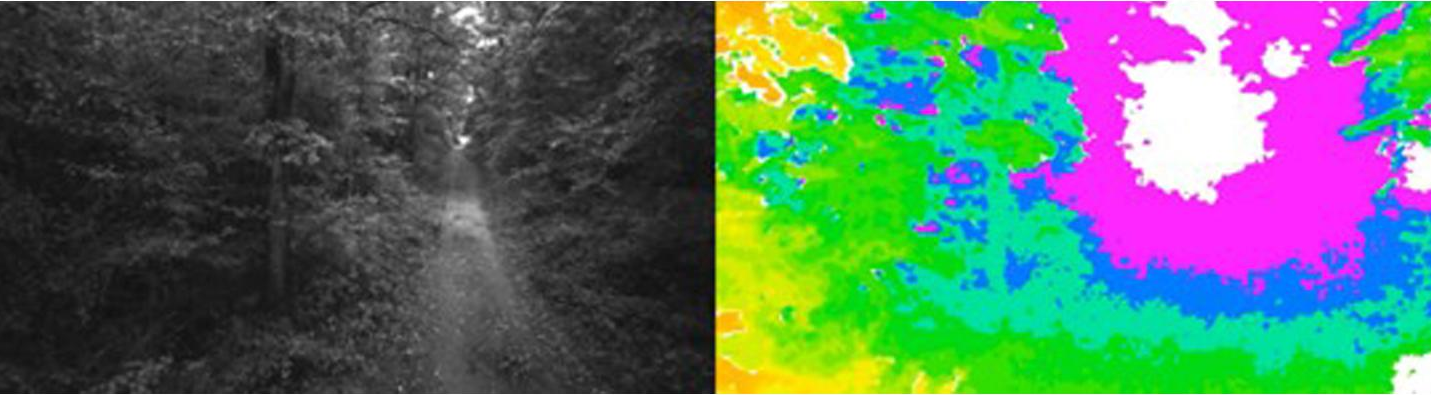
 通过“立体对齐”与“真实深度”测量的离散深度。
通过“立体对齐”与“真实深度”测量的离散深度。 运动深度
 基于运动深度创建的点云示例 - 颜色贴图从红色(较近)变为紫色(较远)。
基于运动深度创建的点云示例 - 颜色贴图从红色(较近)变为紫色(较远)。 填充网格
(1391)在填充网格中从感知系统的位置到3D点的位置绘制一条射线。
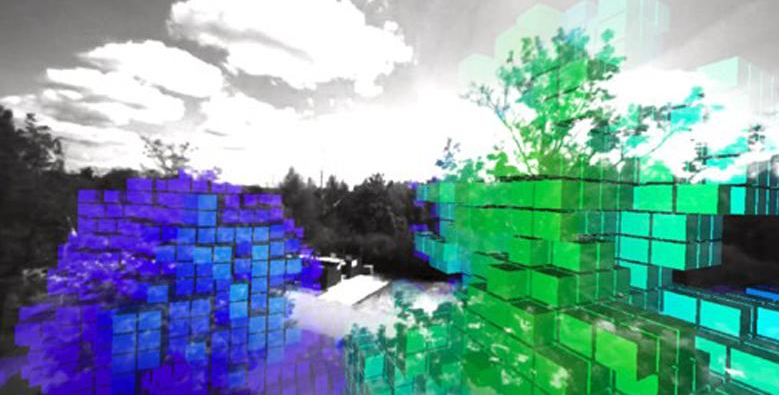 填充网格的示例。体素以高度确定的方式叠加在右侧立体相机视图上,它们处于忙碌状态,范围从红色(近)到紫色(远)。
填充网格的示例。体素以高度确定的方式叠加在右侧立体相机视图上,它们处于忙碌状态,范围从红色(近)到紫色(远)。 避障
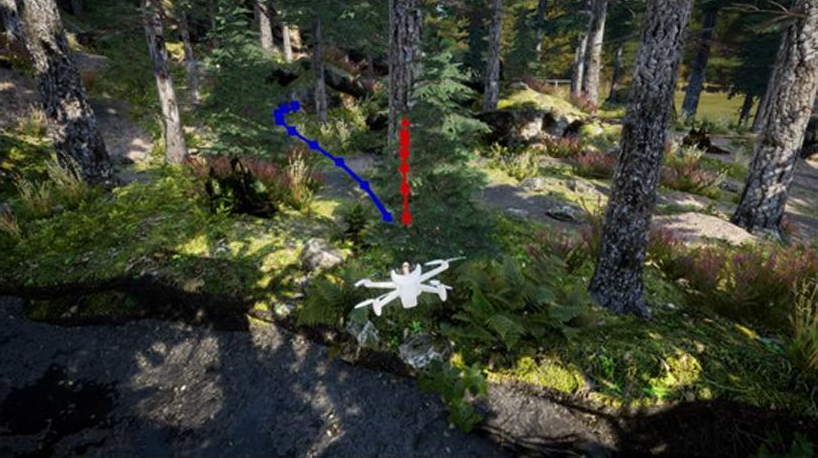 响应于参考轨迹与树的碰撞,由避障算法计算出的调整轨迹的示例。
响应于参考轨迹与树的碰撞,由避障算法计算出的调整轨迹的示例。 飞行任务

主要特点
价格和供货情况

文档下载
视频
来自开发者和用户的热门评论 ANAFI Ai







