
- 1 Introdução
- 2 O desenvolvedor sobre a máquina
- 3 Características
- 4 Pacote conteúdo
- 5 Especificação
- 5.1 Drone
- 5.2 Comunicação
- 5.3 Sistema de Navegação
- 5.4 Skycontroller 4
- 5.5 Bateria Inteligente de Aeronave
- 5.6 App
- 5.7 Câmera
- 5.8 Modos de vôo autônomo
- 5.9 Cibersegurança
- 5.10 Parrot SDK
- 6 Aparência
- 7 Comunicação
- 7,1 4G
- 7,2 máx. alcance com conexão 4G
- 7.3 Wi-Fi
- 7.4 Vídeo ao vivo
- 8 Câmera
- 8.1 Matriz 48MP
- 8.2 Lente
- 8.3 Modos de vídeo
- 8.4 Codificação de vídeo
- 8.5 HDR
- 8.6 Modos de foto
- 9 Estabilização híbrida
- 9.1 Câmera giratória principal
- 10 Fotogrametria
- 10.1 Inspeção e cartografia
- 10.2 Capacidades AI e 4G
- 10.3 Voo autônomo
- 11 Fotogrametria ou lidar
- 11.1 Fotogrametria prós
- 11.2 LIDAR contras
- 12 SDK
- 12.1 Air SDK
- 12.2 Ground SDK
- 12.3 OpenFlight
- 12.4 Sphinx
- 12,5 Olympe
- 12,6 PdrAW
- 12,7 Modelos C. A. D.
- 12,8 MAVLink e compatibilidade GUTMA
- 13 Maior ecossistema parceiro para drones Parrot
- 13.1 Parrot for Any Business Needs
- 14 Cybersecurity
- 14.1 Data Privacy
- 14.2 FIPS140 Compliant -2 e certificado por CC EAL5 Secure Element
- 14.3 4G Secure Connection and Strong Authentication
- 14,4 Secure Initialization and Upgrade
- 14.5 Definição de chaves de usuário no elemento seguro
- 14.6 Fotos assinadas digitalmente
- 14.7 Verificação de transparência e segurança contínua com recompensa de bug
- 15 Gerenciamento de dados
- 15.1 Dados coletados
- 15.2 Uso final dos dados coletados [1 26]
- 15.3 Melhoria da inteligência artificial (AI)
- 16 Características de voo
- 16.1 Características aerodinâmicas
- 16,2 Atuadores e aerodinâmica
- 16,3 Sensores
- 16,4 Características do sensor
- 16,5 Piloto automático
- 17 Voo autônomo
- 17.1 Características principais
- 17.2 Estratégia do sistema de percepção
- 17.3 Sensores
- 17.4 Suspensão dupla
- 17.5 Reconstrução do meio ambiente
- 18 Missões de voo
- 18.1 Características principais
- 19 Preço e disponibilidade
- 20 Baixe a documentação
- 21 Vídeos
Introdução [16 4]
Parrot Anafi Ai é uma solução única completamente nova de um conhecido desenvolvedor francêsuso comercial
O cartão de chamada da Anafi Ai é o módulo 4G embutido, graças ao qual o drone foi capaz de usar a quarta geração de comunicações móveis como o principal canal de transmissão de dados entre o drone e o equipamento de controle, que na verdade remove todas as restrições sobre o alcance de vôo e predetermina a operação do UAV fora da linha de visão. Olhando para o futuro, notamos que o potencial declarado do carro revelou-se incrivelmente poderoso e mais do que nunca corresponde à sua aparência futurista, que foi inspirada pela natureza para criar engenheiros franceses.
O desenvolvedor sobre o carro
Martin Liné, diretor de marketing da Parrot, os drones Parrot

Características
Características principais do Parrot Anafi Ai:
- Peso 898 gramas
- Tempo para voar 60 segundos
- Design dobrável portátil exclusivo
- Módulo de comunicação 4G integrado para interação total de drone / equipamento de controle sem restrições em quaisquer condições ambientais
- Compatível com LTE em todo o mundo
- Equipado com sistema de transmissão de sinal omnidirecional (4 antenas direcionais com refletor (ganho: antenas de 2,5 dBi / s). O drone determina o melhor par de antenas dependendo de sua orientação e posição em relação ao posição do piloto)
- Equipado com um sistema de imagem omnidirecional exclusivo do mundo circundante construído em um par de câmeras estereoscópicas montadas em um gimbal especializado com uma faixa panorâmica de 330 graus (-120 ° a 210 °), trabalhando em em conjunto com um sistema de otimização inteligente. trajetórias de vôo
- Adaptado para vôo interno
- Streaming de vídeo ao vivo em 1080p com baixa latência (300 m / s) sem restrições de alcance em qualquer lugar do mundo, com taxa de bits de vídeo de 12 Mbps
- Capacidade de transferir arquivos para armazenamento em nuvem diretamente durante o voo
- Módulo de comunicação Wi-Fi integrado (Wi-Fi 802.11a / b / g / n) para controle total de interação drone / equipamento (como uma alternativa opção de conexão)
- Escravo. Faixa de frequência de Wi-Fi: 2,4 GHz / 5,8 GHz
- Máx. alcance do voo FPV sobre Wi-Fi: 9 km
- Modo automático exclusivo de operação de módulos 4G / Wi-Fi, que permite, com base no congestionamento da rede, alternar perfeitamente de uma tecnologia de comunicação para outra sem perda de dados
- Drone de classe de proteção IPX3
- Máx. tempo de vôo 32 min
- Máx. velocidade de vôo horizontal 61 km / h
- Máx. resistência ao vento: 13 m / s
- Máx.teto acima do nível do mar 5000 m
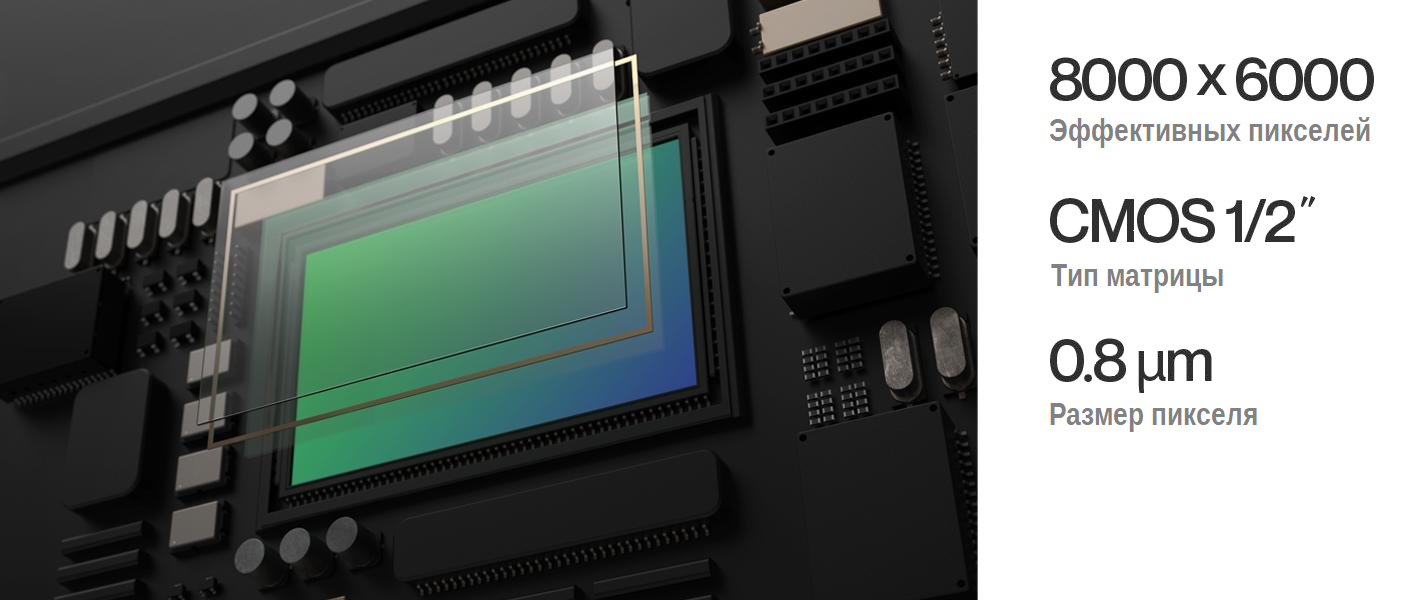
- Câmera 4K de 48MP construída em matriz CMOS de 1/2 polegada com um tamanho de pixel de 0,8 μm; com matriz de filtro de cor Bayer integrada
- Lente óptica LD-ASPH
- Sistema híbrido de estabilização de imagem de 6 eixos (EIS digital de 3 eixos mecânico de 3 eixos)
- Controlável faixa operacional gimbal -90 ° a 90 °
- Zoom digital sem perdas 6x (2x no modo 4K / 4x no modo FHD)
- Máx. taxa de bits de vídeo 200 Mbps
- Formatos de gravação de vídeo HDR8 / HDR10
- Máx. faixa dinâmica 14EV
- Perfil de cor P-log para pós-processamento
- 5 × modos de vôo e disparo automáticos (Fotogrametria / Plano de vôo / Cameraman / Smart RTH / Veículo)
- Slots integrados para cartões MicroSD e SIM
- Compatível com PIX4D Suite
- Os modos de voo fotogramétricos estão disponíveis no mob. Aplicativo FreeFlight 7 e software OpenFlight
- Criação de plano de vôo com um clique
- Fotogrametria 48MP 1 fps: duas vezes mais rápido que os concorrentes
- Precisão de tiro: 0,46 cm / pix. GSD at 30m
- Suporte ao Parrot SDK (com a capacidade de embutir seu código no drone usando o Air SDK, criar aplicativos móveis usando o Ground SDK, configurar uma estação terrestre de código aberto usando OpenFlight, interagir com o moderno Sphinx ferramenta de simulação de drones, bem como scripts Python com Olympe e processamento de vídeo e metadados com PdrAW)
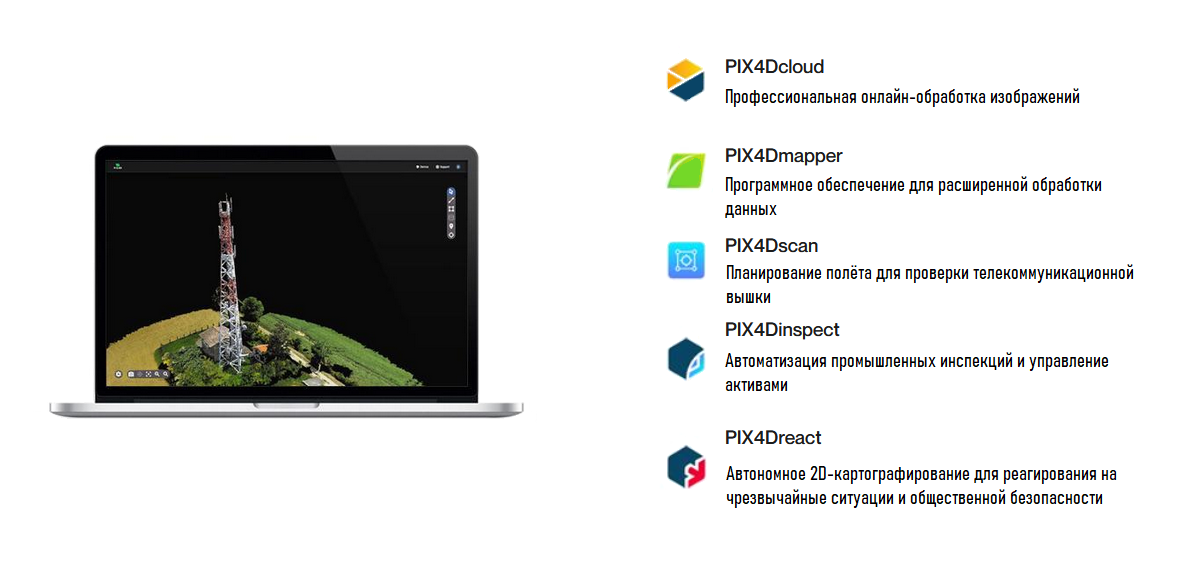
- Compatível com software de terceiros: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- ANAFI Ai está em conformidade com Geral Regulamentações Regulamento de Proteção de Dados da União Europeia (GDPR)
- Privacidade de dados superior com NIST FIPS140-2 Nível 3 Elemento Seguro WISeKey integrado com certificação Common Criteria EAL5
- Vídeo e controles protegidos com SRTP / DTLS de acordo com webRTC
- Novo equipamento de controle portátil Parrot Skyco ntroller 4
- Novo aplicativo móvel Parrot FreeFlight 7

Pacote
O desenvolvedor oferece o drone em uma única configuração, que incluirá:
- Drone ANAFI Ai
- Caixa de transporte rígida
- Equipamento de controle Parrot Skycontroller 4
- 1 × Smart bateria
- Carregador USB-PD
- Kit de hélice sobressalente (2CW / 2CCW)
- Cabo complementar (USB-C para Lightning)
- Cabos acompanhantes 2 × (USB-C para USB-C)
- Tabela de calibração

Especificação
Aeronave

Comunicação
Sistema de navegação
Skycontroller 4

Bateria inteligente de aeronave
App

Câmera

Modos de voo autônomo
Cibersegurança
Parrot SDK
Em seguida, pode se familiarizar com as principais informações do Parrot Anafi Ai, que lhe permitirão saber mais sobre o potencial declarado da máquina, bem como quais melhorias foram implementadas em comparação com a versão comercial do drone Parrot Anfi Térmico e outros drones de marcas líderes.
Aparência





Comunicação
4G
ANAFI Ai inclui módulo de rádio 4G (além de o módulo de rádio Wi-Fi), que permite transmitir um stream de vídeo em qualidade 1080p com uma taxa de bits máxima de 12 Mbps, com uma latência muito baixa (300 ms), sem limitação de alcance e em qualquer parte do mundo.
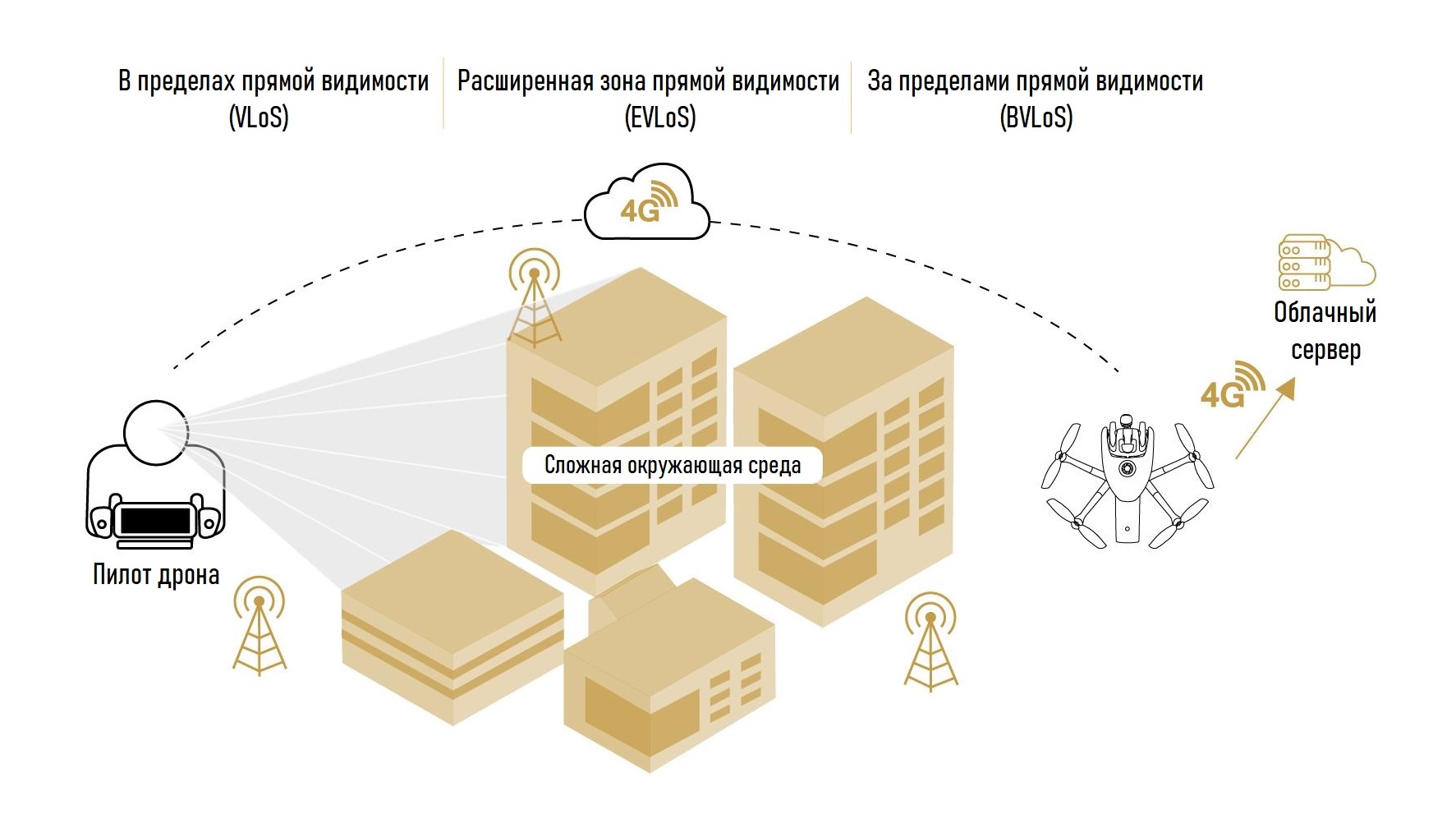
Compatibilidade
O módulo ANAFI Ai 4G suporta mais de 28 bandas de frequência, cobrindo mais de 98% das frequências implantadas em todo o mundo.
Troca automática de rede
A qualidade e a largura de banda das redes 4G e Wi-Fi são medidas a cada 100 ms para adaptar o streaming às condições da rede. Combinado com algoritmos de roteamento, a conexão entre o drone e seu controlador é mantida mesmo quando o Wi-Fi é severamente interrompido. Assim, quando a largura de banda efetiva (largura de banda utilizável) do Wi-Fi for inferior a 1,5 Mbps, o sistema mudará automaticamente para 4G.
Para limitar o consumo de dados móveis quando o piloto está dentro do alcance da rede Wi-Fi do drone, a transição de 4G para Wi-Fi também é realizada automaticamente sem cortar o fluxo de vídeo.
Máx. alcance com conexão 4G
O vídeo do desenvolvedor mostra o máx. alcance de vôo do Anafi Ai com conexão 4G em uma direção com uma carga de bateria. O tempo total de vôo foi de 29 minutos a uma velocidade média de vôo horizontal de 58 km / h (16 m / s). Durante esse tempo, o drone foi capaz de cobrir 27 km. Você também pode notar que o vôo foi realizado em condições de vento forte, que era constantemente alertado pelo sistema de drones.
Algoritmos de otimização de fluxo de vídeo implementados
Controle de congestionamento 4G
O algoritmo de controle de congestionamento permite:
- Medir a perda de pacotes em todo o ciclo da rede.
- Mede o atraso (tempo de ida e volta).
- Ajuste a largura de banda de acordo com esses dois parâmetros.
O objetivo final do algoritmo é maximizar a largura de banda disponível, mantendo a latência mais baixa possível. Este algoritmo é implementado em cada uma das interfaces disponíveis no drone, cada uma com seus próprios parâmetros, otimizados de acordo com a rede. Com base nas informações fornecidas por esse algoritmo, o gerenciador de link toma decisões de roteamento e interface ativa.
Controlando o drone via conexão 4G
ANAFI Ai se conecta ao controle remoto via 4G em menos de 30 segundos se o drone estiver fora do alcance de Wi-Fi e em menos de 15 segundos se o drone estiver dentro do alcance do wi-fi. E também a conexão 4G fornece:
- Detecção e início de uma conexão baseada no protocolo VOIP SIP.
- Use um servidor de retransmissão para estabelecer conexões em redes seguras.
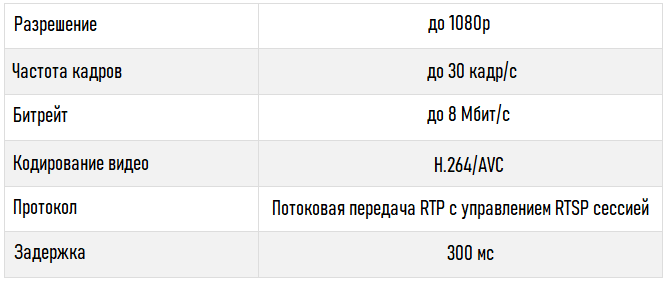
Desempenho de fluxo de vídeo
- Latência: 300 ms.
- Segurança: vídeo e controles são protegidos com SRTP / DTLS de acordo com webRTC.
- Antenas: 28 bandas LTE de 700 MHz a 2,6 GHz.

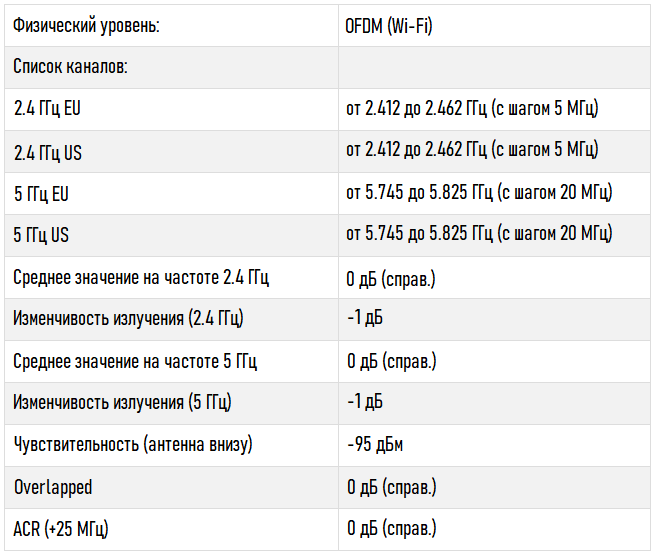
Wi-Fi
Sistema de transmissão omnidirecional
- ANAFI Ai tem 4 antenas refletoras direcionais (com ganho da antena: 2,5 dBi / s). O drone determina o melhor par de antenas com base em sua orientação e posição em relação à posição do piloto.
- Com um ganho recombinado de 3,5 / - 1,5 dBi no plano horizontal do drone, o ganho de RF ANAFI Ai é altamente uniforme.
- A radiação da antena downstream foi melhorada em 4 dB em relação ao ANAFI.
Projeto externo do rádio de alta potência
A frente do rádio maximiza a potência na base da antena com muito boa linearidade e sensibilidade (-94 dBm a 6,5 Mbps) para atingir a potência máxima de limitação do FCC.

Confiabilidade de Wi-Fi
parâmetros 802.11
largura de banda baixa, latência baixa, variabilidade do nível de recepção devido à velocidade do drone, longo alcance, presença de interferência. Esses parâmetros incluem agregação, novas tentativas, tecnologia MiMo (STBC), taxa de dados de quadro de controle e condições de desconexão.
Prevenção inteligente de interferência
ANAFI Ai tem um algoritmo para exclusão de canal (banda dupla de 2,4 GHz e 5 GHz) em caso de interferência.
Adaptação e monitoramento de fluxo
ANAFI Ai monitora continuamente o status de seu link de 4 Hz e pode detectar interferência. Isso permite otimizar dinamicamente a largura de banda e o tamanho dos pacotes transmitidos. Ele também alerta o piloto se ele estiver em um ambiente particularmente congestionado ou prestes a perder o sinal.
Redução da largura de banda
No limite de seu alcance e se as condições permitirem, ANAFI Ai pode mudar para largura de banda de 10 MHz para melhorar sua sensibilidade em 3 dB e aumentar o alcance em 40%.

Indicadores de rádio
Transmissão de vídeo
Indicadores de link de vídeo
Algoritmos de otimização de fluxo de vídeo implementados
Parrot Gen4 Streaming (4ª geração)
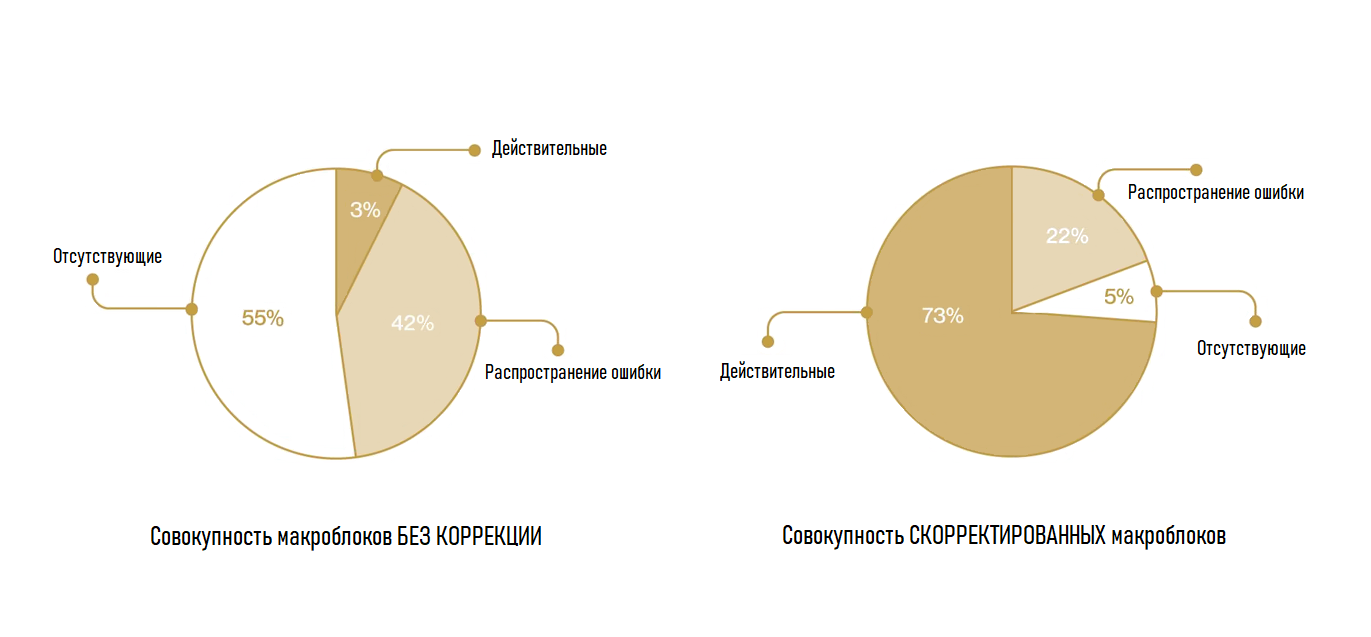
Este algoritmo reduz o impacto visual de perdas de rede e fornece interoperabilidade todos os decodificadores, enquanto fornecem um fluxo sintaticamente completo: as partes ausentes da imagem são reconstruídas como partes ausentes, idênticas às da imagem de referência.
Assim, as falhas estão contidas nas áreas que são passíveis de perda e não se aplicam a toda a imagem.
Os gráficos abaixo mostram a taxa de sucesso para a decodificação do macrobloco com 5% de perda de rede - com e sem os recursos avançados de streaming ANAFI Ai. O algoritmo garante a decodificação correta de 75% dos macroblocos. Eles permitem que o usuário continue sua missão sem congelar a tela ou perder o streaming.
Controle de congestionamento
O algoritmo também avalia o ambiente de rádio e Wi-Fi para antecipar e evitar perda de pacotes e congestionamento de rede, o que ajuda a reduzir a latência. O algoritmo é baseado em uma estimativa da capacidade do canal, calculada com base na taxa de dados e na taxa de erro na camada física; em seguida, afeta os parâmetros de codificação e encapsulamento da rede.
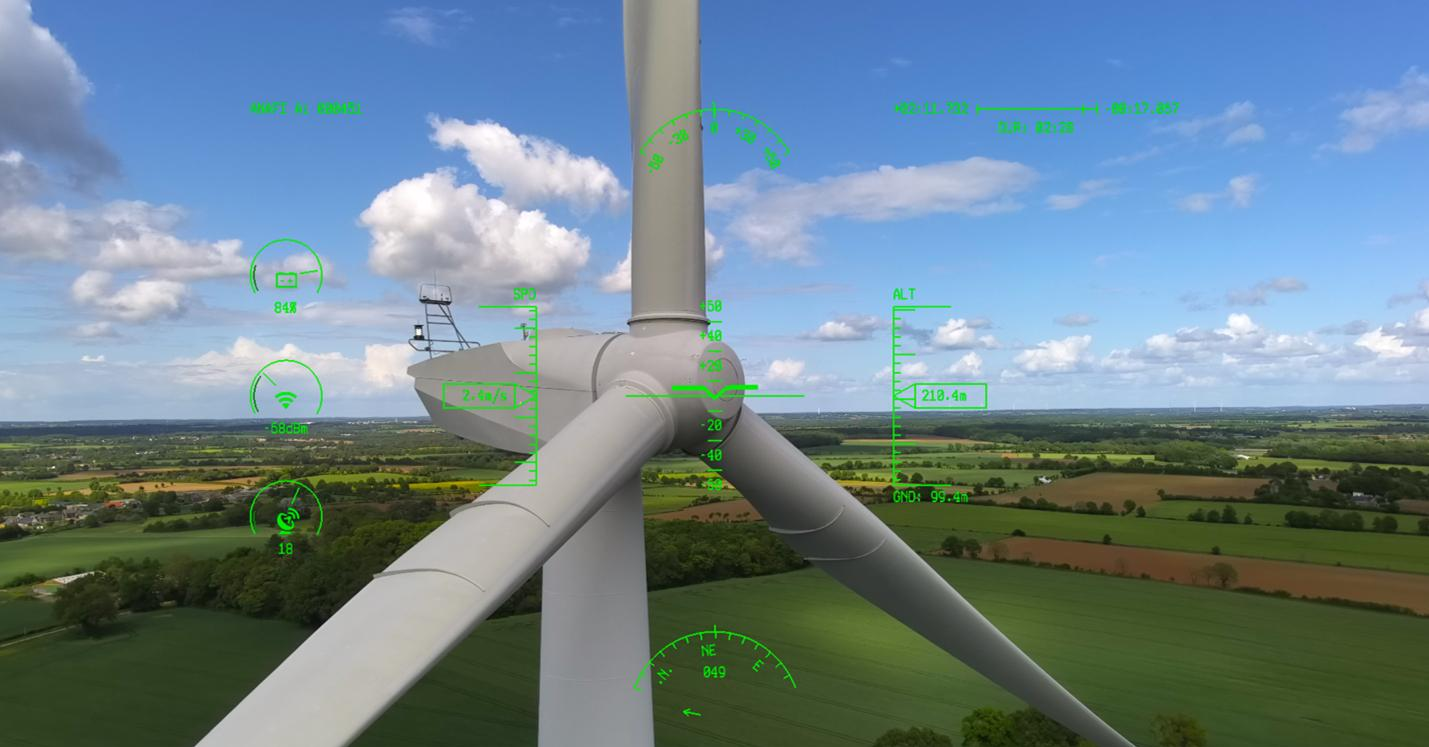
Metadados
Os metadados são transmitidos com o fluxo de vídeo. Em particular, eles contêm elementos de telemetria de drones (posição, altitude, velocidade, nível de bateria, etc.) e métricas de vídeo (ângulo da câmera, valor de exposição, campo de visão, etc.).
A sincronização de imagens e metadados abertos realiza as funções de posicionamento preciso no mapa, rastreamento de instrumentos de voo no HUD ou habilitação de elementos de realidade aumentada.
Os metadados são incluídos usando métodos padrão (extensão do cabeçalho RTP); o formato de dados definido pela Parrot é open source: está disponível no ANAFI Ai SDK.
Câmera

Sensor 48MP
A matriz Ai ANAFI inclui um grande número de megapixels para fotografia aérea detalhada.
Ele emprega a tecnologia de matriz de filtro de cor Quad Bayer, onde grupos de 4 pixels adjacentes têm a mesma cor. Assim, a captura HDR em tempo real pode ser obtida nos modos de foto e vídeo adicionando sinais de quatro pixels adjacentes.
Sua faixa dinâmica é 4 vezes maior que as matrizes Bayer padrão. Mesmo cenas complexas podem ser filmadas com realce mínimo ou perda de detalhes de sombra.
Lente
A lente ANAFI Ai foi desenvolvida especialmente para a Parrot. Ele combina 6 elementos asféricos e é otimizado para reduzir o reflexo ótico. Esta lente oferece HFoV de 68 ° no modo de vídeo padrão e HFoV de 64,6 ° no modo de foto padrão.

Modos de vídeo
ANAFI Ai captura vídeo 4K suave a 60 quadros por segundo, incluindo P-Log, e também HDR10 4K vídeo a até 30 fps. A tabela abaixo lista todos os modos de vídeo ANAFI Ai.

Codificação de vídeo
Os usuários podem escolher entre H.264 (AVC) e H.265 (HEVC).
Todas as resoluções usam os seguintes formatos de pixel:
- YUV420p (espaço de cor BT.709 de 8 bpc) para o modo padrão e HDR8.
- YUVJ420p (8 bits / componente, faixa completa - espaço de cor BT.709) para o estilo P-log.
- YUV420p10 (espaço de cor 10bpc BT.2020) para gravação HDR10, apenas H.265.
HDR
Ao gravar vídeo em HDR8 e HDR10, ANAFI Ai cobre uma faixa dinâmica de 14EV. O formato HDR10 oferece um brilho máximo de 1000 nits e uma profundidade de cor de 10 bits. Ele fornece uma gama de bilhões de cores contra 16 milhões para a faixa dinâmica padrão. Comparado ao HDR8, o HDR10 produz imagens duas vezes mais brilhantes com um aumento correspondente no contraste. HDR8 pode ser exibido em qualquer tela padrão, enquanto HDR10 é para TVs e telas HDR10.
Modos de foto
Descrição dos modos
A seção de controle de modo contém configurações que afetam o número de fotos tiradas cada vez que o obturador é disparado.
Modo de captura única
Modo de captura única padrão. Após cada liberação do obturador, a imagem capturada é imediatamente processada pelo sistema.
Modo de agrupamento
Os usuários podem gravar uma série de 3, 5 ou 7 quadros com exposições diferentes para cada quadro. As seguintes predefinições estão disponíveis:
- [-1 EV, 0, 1 EV] (configurações padrão)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

Modo Burst
O modo Burst permitirá ao usuário fazer um burst de 10 quadros em 1 segundo.
Modo Panorama
O modo Panorama inclui quatro fotos panorâmicas diferentes:
- Esférico (360 °) é um modo panorâmico inclui três opções para fotografando um panorama esférico: Esfera / Pequeno Planeta / Túnel.
- Horizontal (180 °)
- Vertical (109 °)
- Superlargo - novo super modo de costura ampla de 9 imagens (HFOV 110 °, panorama reto)
Para obter detalhes sobre as especificações do modo panorama, consulte a tabela abaixo:

Modo de lapso de tempo
Este modo permite tirar fotos nos seguintes intervalos de tempo fixos:
- 48MP: 1, 2, 4, 10, 30 ou 60 segundos.
- 12 MP: 0,5, 1, 2, 4, 10, 30 ou 60 seg.
Modo de lapso GPS
Este modo de foto foi desenvolvido para inspeção e fotogrametria. Ele permite que você tire fotos nos seguintes intervalos de distância fixos: 5, 10, 20, 50, 100 ou 200 metros.
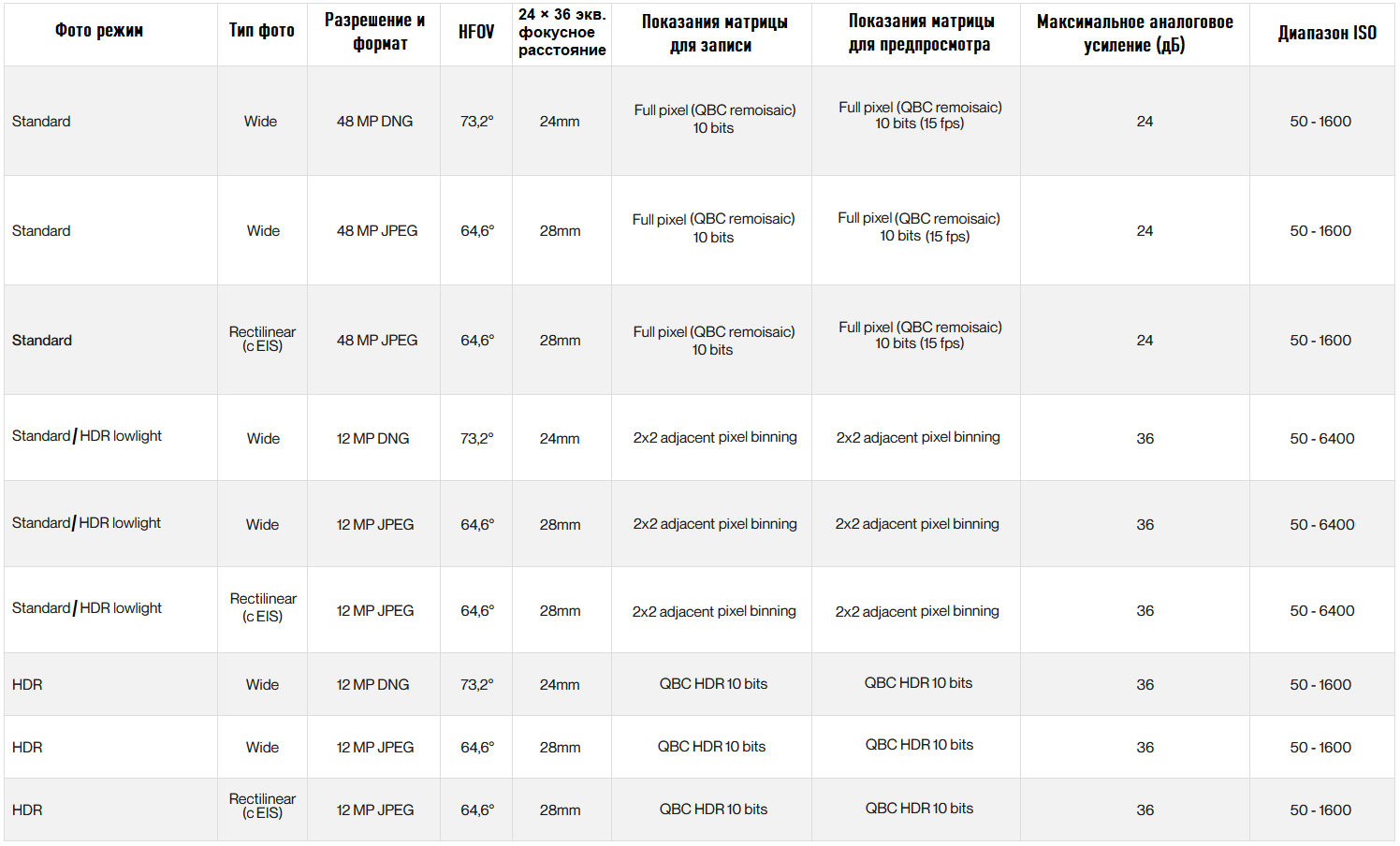
A tabela abaixo mostra os modos e resoluções de captura de imagem estática, incluindo o modo Leitura do Sensor:
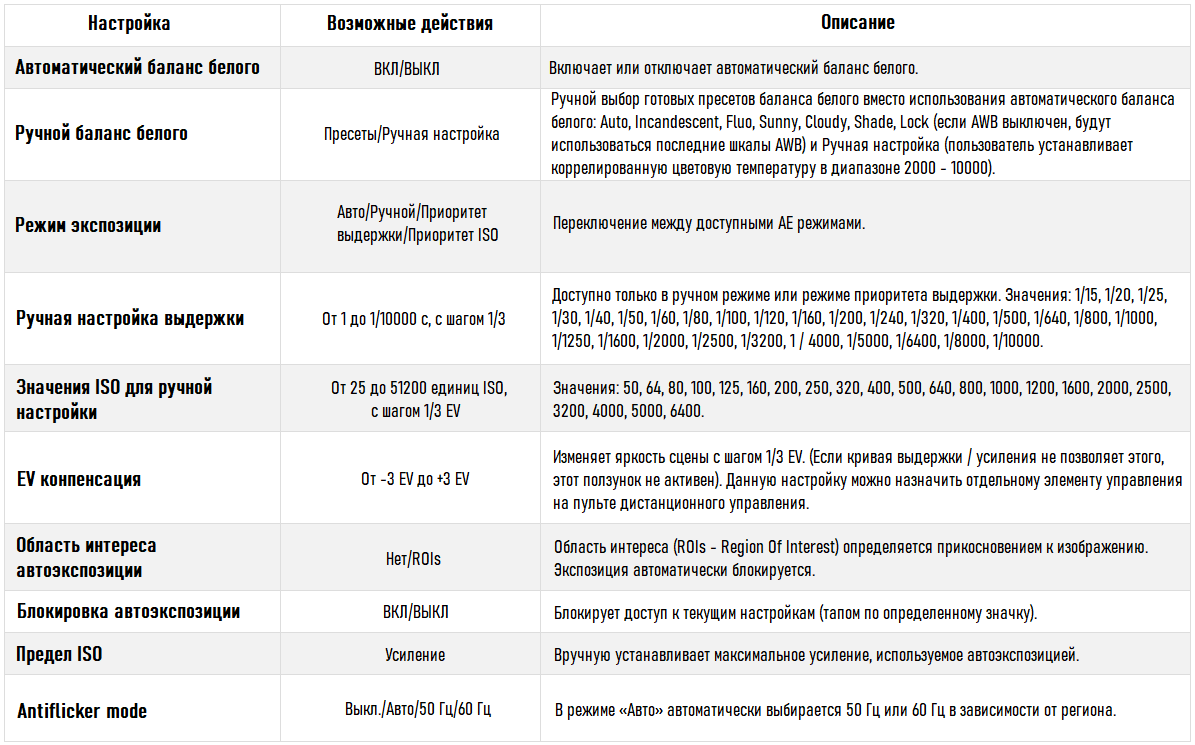
Configurações
No seguinte A tabela lista as configurações disponíveis para cada modo.
Zoom 6x
O zoom está disponível em todos os modos de foto e vídeo. Combinado com um sensor de 48 megapixels, algoritmos de nitidez precisos produzem imagens de alta definição mesmo ao usar zoom digital 6x. Os usuários ANAFI Ai agora podem ver detalhes de 1 cm a 75 m de distância. A alta contagem de pixels também permite que o vídeo 4K seja cortado para 1080p sem perda de qualidade.

Estabilização híbrida
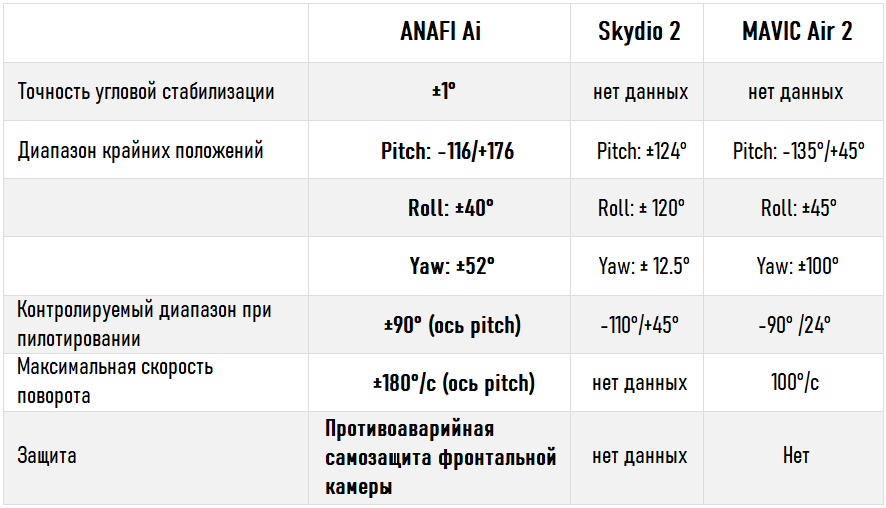
ANAFI Ai tem a estabilização mais precisa no mercado de micro UAV.
Combina estabilização combinada:
- Mecânica de 3 eixos (mec. De 3 eixosGimbal)
- Electronic 3-axis (EIS)
A estabilização mecânica estabiliza o eixo de apontamento da câmera, independentemente da posição de vôo do drone. A estabilização de imagem eletrônica corrige os efeitos de micro-vibração para frequências acima de 100 Hz, que o acionamento mecânico não pode controlar.
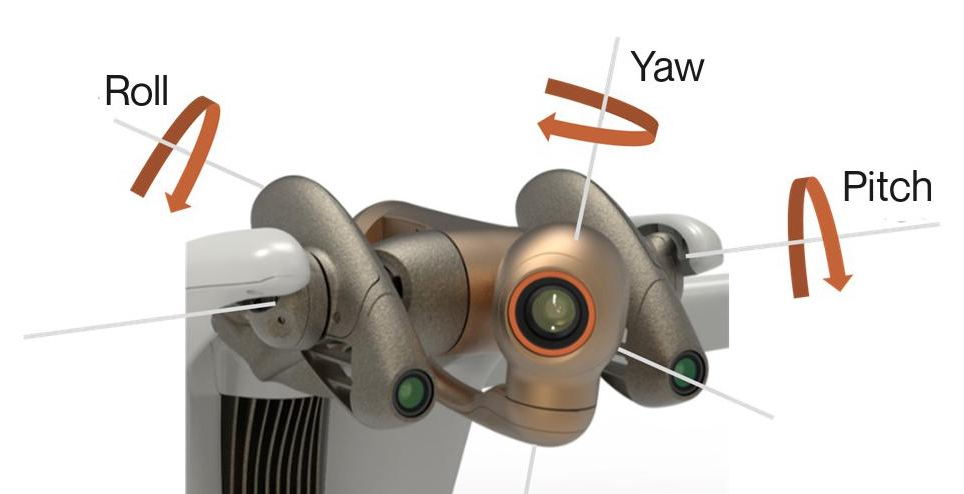
Gimbal da câmera principal
A estabilização mecânica permite estabilizar e orientar o eixo horizontal da visualização da câmera em todos os 3 eixos.
 3 eixos do mecanismo de rotação. suspensão da câmera principal ANAFI Ai.
3 eixos do mecanismo de rotação. suspensão da câmera principal ANAFI Ai.
Principais recursos
- Gimbal mecânico de 3 eixos para câmera principal
- Deslocamento vertical 292 °, campo de visão -116 ° a 176 °
Desempenho do Gimbal
- O algoritmo EIS corrige os efeitos de oscilação e distorção da lente grande angular e também executa digital de 3 eixos estabilização de imagem (Roll, Pitch e Yaw).
- O método consiste em aplicar uma transformação geométrica da imagem. A transformação geométrica está associada ao registro de data e hora e à posição exata graças ao IMU.
- A transformação geométrica é aplicada a cada imagem de acordo com a distorção ótica, vibrações e movimentos da unidade de câmera medida.
Faixa de rotação 292 °
A câmera tem uma faixa de rotação horizontal de -116 ° / 176 ° em torno do eixo de inclinação, proporcionando observação acima e abaixo do drone, que é um oportunidade única no mercado micro-UAV.
![]()
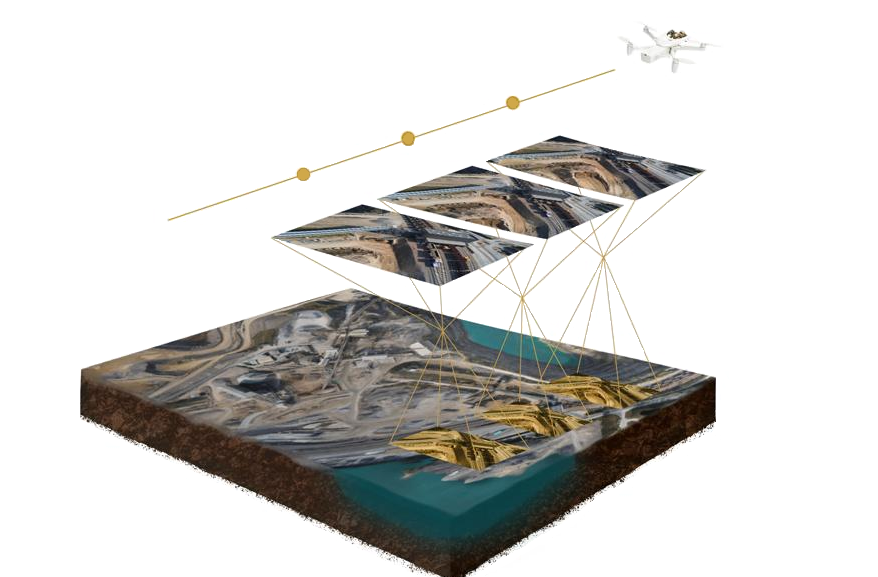
Fotogrametria
A fotografia aérea com veículos aéreos não tripulados está mudando a maneira como os especialistas conduzem inspeções e levantamentos. Métodos de fotogrametria são usados para processar imagens coletadas por UAVs para criar modelos 2D e 3D, que posteriormente permitem que os clientes agendem a manutenção dos objetos levantados em tempo hábil.
4G fornece confiabilidade sem precedentes do link de dados do drone. Os usuários podem operar UAVs em grandes áreas, perto de estruturas metálicas, edifícios, sem medo de perda de comunicação.
Inspeção e Mapeamento
Ao combinar o AI do drone ANAFI Ai com a plataforma online PIX4Dinspect, os usuários serão capazes de conduzir inspeções mais rápidas e eficientes do que nunca. Os algoritmos de aprendizado de máquina reconhecem antenas em torres de celular, determinam seu tamanho, altura, inclinação, azimute e verticalidade.
Clique nas imagens abaixo para visualizar modelos 3D de demonstração gerados pela ANAFI Ai.
Exemplo # 1

Exemplo # 2
Melhor matriz da classe
A câmera do drone ANAFI Ai é equipada com um sensor CMOS de 48 MP 1/2 pol. Construído com a tecnologia de filtro de cores Quad Bayer, que é mais adequada do que nunca para inspeção e fotogrametria. A matriz utilizada permite obter imagens detalhadas com uma ampla faixa dinâmica.
Fotos de alta resolução
ANAFI Ai é capaz de gerar imagens estáticas de 48 megapixels, capturando assim todos os detalhes em alta resolução e criando uma nuvem de pontos de alta densidade.
Nitidez significativa
As missões de inspeção requerem a capacidade de identificar detalhes minuciosos, como números de série, conectores, manchas de ferrugem e rachaduras incipientes.
Faixa dinâmica ampla
10 pontos de faixa dinâmica no modo padrão, 14 pontos no modo HDR. A gradação ideal da imagem é essencial para criar pontos de nuvem consistentes e reconstruções 2D ou 3D de alta qualidade.
55% mais detalhes do que sensores de 1 polegada
O sensor Quad Bayer 48 MP de 1/2 polegada da ANAFI Ai é mais nítido do que os sensores de 20 MP de 1 polegada usados em vários drones profissionais modernos. As imagens a seguir da inspeção do telhado ANAFI Ai e DJI Phantom 4 Pro V2.0 na mesma altura demonstram claramente esse fato.

Ideal para inspeções
O gimbal ANAFI Ai inclui um sistema de estabilização híbrido de 6 eixos (eletrônico mecânico) que compensa as flutuações de voo e garante a nitidez da imagem. A câmera Ai ANAFI possui uma faixa ajustável de -90 ° a 90 °, tornando-a um instrumento aerotransportado ideal para visualizar a parte inferior de uma base de ponte.
Inclinação controlável ± 90 °
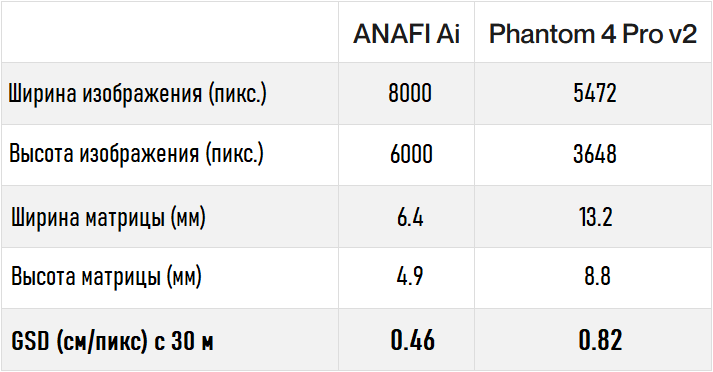
Precisão
ANAFI Ai permite que os usuários alcancem um GSD de 0,46 cm / px de uma altura de 30 m, o que significa planimetria de precisão relativa de até 0,92 cm.
Para comparação, na mesma altura o DJI Phantom 4 Pro V2 fornece um GSD de apenas 0,82 cm / px. Em outras palavras, ANAFI Ai pode mapear o mesmo alvo, voando mais de 1,5 vezes mais alto que o Phantom, com um nível de detalhe equivalente.
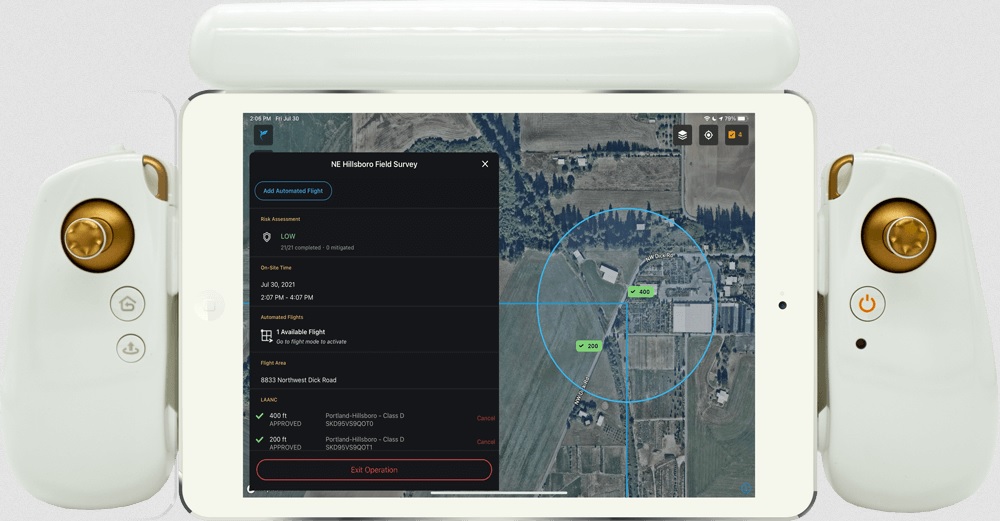
Capacidades AI e 4G
Um aplicativo. Any Flight Plan
O potencial do aplicativo móvel FreeFlight 7 permite ao usuário iniciar todas as missões de levantamento, inspeção e fotogrametria.

Modos de voo fotogramétrico disponíveis
Os seguintes modos de voo fotogramétrico estão agora disponíveis no aplicativo móvel FreeFlight 7:
- Grade
- Grade dupla
- Сircular
Crie um plano de voo com um toque
Um toque no mapa interativo 3D FreeFlight é tudo que você precisa para construção de digitalização rápida. A inteligência artificial determina automaticamente os parâmetros de voo e trajetória ideais. Imagens de 48MP com georreferenciamento preciso de sensores ANAFI Ai (IMU, GNSS e tempo de vôo) permitem uma reconstrução 3D precisa.
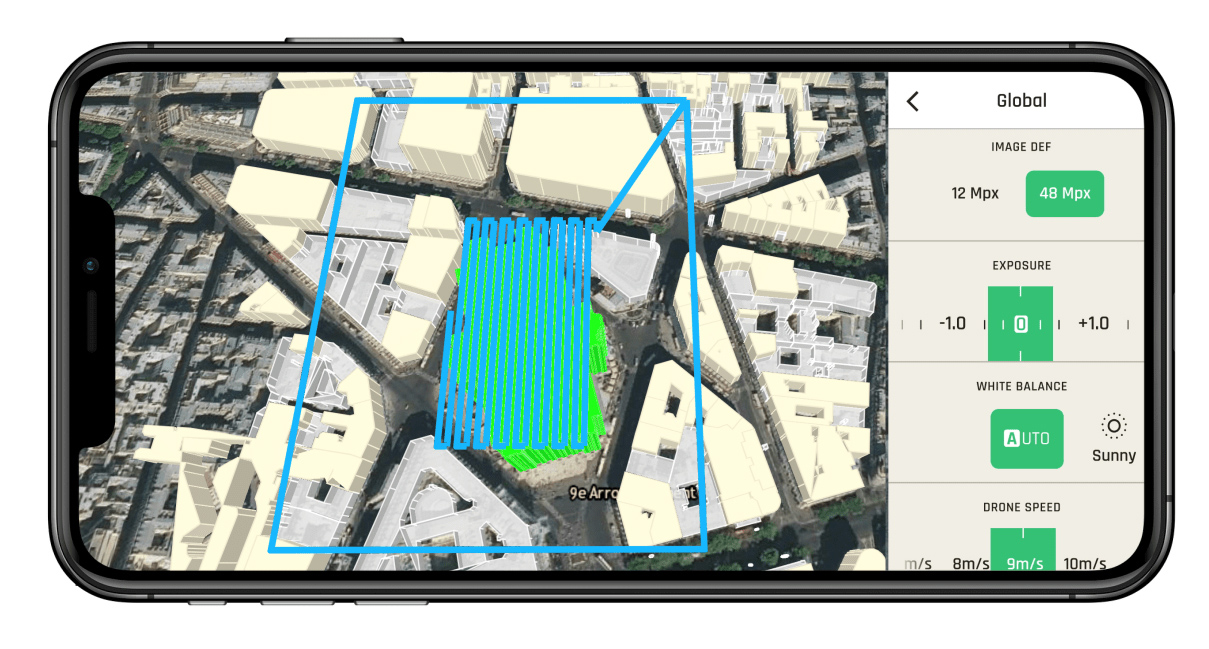 Plano de vôo automático criado com um toque no cadastro 3D.
Plano de vôo automático criado com um toque no cadastro 3D.
- O fundo cartográfico do FreeFlight 7 é do software ArcGIS. A representação 3D do edifício é baseada em dados do OpenStreetMap que cobrem cidades ao redor do mundo.
- Sistemas de visualização garantem a segurança de um determinado plano de vôo: os usuários não precisam se preocupar com obstáculos. ANAFI Ai os evita de forma autônoma.
Voo autônomo
O sistema de sensor omnidirecional ANAFI Ai, baseado em visão estereoscópica, se orienta automaticamente na direção da viagem.

O drone detecta obstáculos que estão a 30 metros de distância. A tecnologia AI constrói e atualiza constantemente a grade de preenchimento enquanto executa um determinado plano de vôo. Ele representa o ambiente do drone em voxels.
Os algoritmos determinam a melhor trajetória para evitar a colisão com obstáculos, enquanto o drone permanece focado em seu alvo: a missão de vôo atribuída.

Conexão 4G
ANAFI Ai é o primeiro microdron comercial equipado com um módulo 4G. Cobre mais de 98% das frequências usadas em todo o mundo.

Levantamento de linhas de alta tensão. Filmado com ANAFI Ai, editado com Pix4Dmatic. Tamanho da cena: 4060 × 60 × 70 m. Número de imagens: 2172. GSD: 1,3 cm / pix. Altura: 90 m. Sobreposição frontal / lateral: 90% / 65%.
O drone é capaz de alternar perfeitamente de Wi-Fi para 4G e vice-versa, fornecendo assim a conexão mais confiável, que por sua vez garante:
- A capacidade de realizar voos BVLOS
- Conexão estável mesmo ao voar em ambientes com obstáculos e edifícios
- Voo seguro em ambientes de alto ruído
- Qualidade do link de vídeo 1080p @ 30 fps
- Upload direto de imagens para servidores em nuvem

Otimização do tempo de voo
De acordo com o desenvolvedor, economias de tempo significativas foram alcançadas devido ao alto desempenho da imagem ANAFI Ai:
- 48 MP permite que o drone voe mais de 1,5 vezes mais alto do que drones com sensores de 1 polegada de 20 MP, ao mesmo tempo em que obtém o mesmo GSD. Em outras palavras, altitude maior e missão mais rápida andam de mãos dadas.
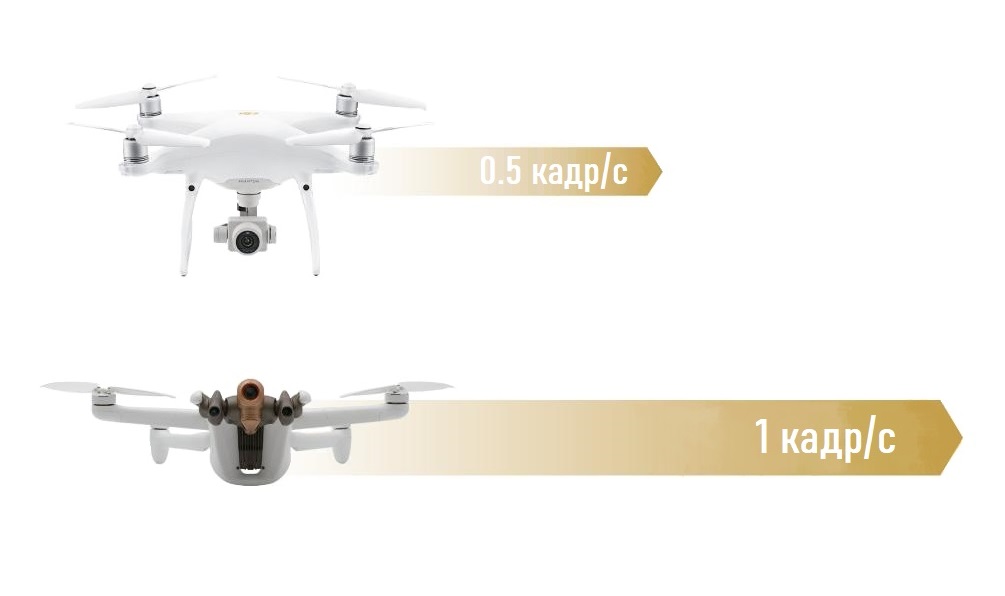
- Fotografia 1 fps: ANAFI Ai dispara duas vezes mais rápido que Autel EVO 2 e DJI Phantom 4 Pro V2.0.
Transferência 4G em vôo para PIX4Dcloud
No processo de criação de um modelo digital a partir de fotografias aéreas de um drone, transferência de arquivos e processamento fotos são duas tarefas demoradas. ANAFI Ai ajuda os usuários a acelerar seu fluxo de trabalho. Em particular, o sistema de drones permite:
- Transferir imagens para servidores seguros diretamente em vôo usando a conexão 4G do drone.
- Imediatamente comece a calcular objetos no final do vôo: ortomosaicos, nuvem de pontos, modelos de elevação e malha texturizada.
- Compartilhe facilmente mapas 2D e modelos 3D de qualidade de levantamento com funcionários e clientes.
![]()
PIX4D Suite Compatibility
ANAFI Ai agora é totalmente compatível com um pacote exclusivo de aplicativos de fotogrametria móvel, desktop e nuvem que consiste em:
Fotogrametria ou lidar
Por que escolher a fotogrametria para levantamento e levantamento? Além da acessibilidade e facilidade de uso, a fotogrametria aérea é a melhor escolha quando a interpretação visual dos dados é necessária.
Fotogrametria pros
- Fornece múltiplas visualizações: ortomosaico, nuvem de pontos coloridos, malha texturizada.
- Cria uma nuvem de pontos com densidade mais alta, cada um contendo uma quantidade significativa de informações (altura, textura, cor).
- Ultrapassa o LIDAR em precisão de renderizações fotorrealísticas 2D e 3D - o LIDAR não fornece um alto nível de detalhes contextuais.
LIDAR cons
- Custa 100 vezes mais do que um UAV com uma matriz RGB.
- A complexidade do processamento de dados e possíveis erros de interpretação.
- Adicionar informações de cores é possível, mas complica o processo.
- LIDAR gera nuvem de pontos apenas e se destina a casos e situações específicas.
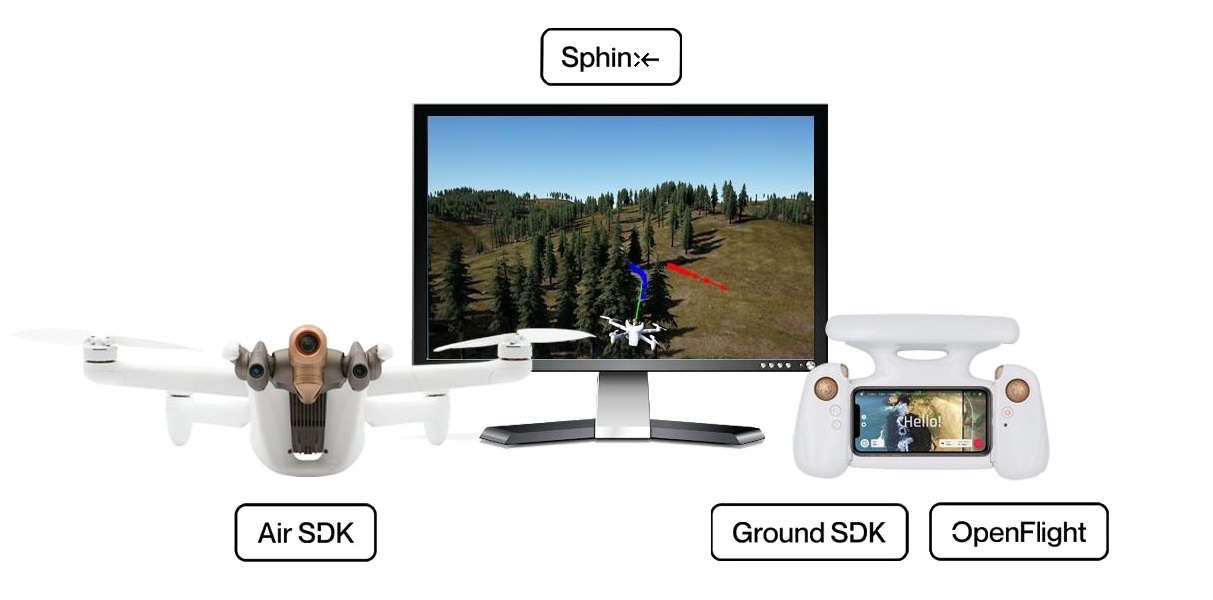
SDK
O Parrot Software Development Kit é um conjunto de ferramentas e software de código aberto para desenvolvedores. Desde a criação do primeiro drone A. R. Drone, o software de código aberto da empresa sustenta as plataformas e ferramentas do desenvolvedor, e Parrot
O desenvolvedor esclarece que todos os recursos SDK da empresa estão disponíveis gratuitamente, sem registro e rastreamento, no portal " Parrot Portal do desenvolvedor"... Você também pode se juntar aos milhares de desenvolvedores no fórum Parrot, onde você pode discutir tópicos atuais diretamente com os engenheiros da empresa.
Air SDK
Execute seu código no ANAFI Ai
O Air SDK fornece uma arquitetura de tecnologia revolucionária para baixar e executar o código diretamente na ANAFI Ai. Os desenvolvedores podem programar missões de voo personalizadas com acesso a todos os sensores de drones, interfaces de conexão e funções de piloto automático.
Air SDK fornece acesso a bordo para:
- Todos os sensores (IMU, GPS, TOF) e modos de voo
- Fluxo de vídeo e metadados com todas as câmeras
- Interfaces de comunicação Wi-Fi, 4G, USB
- Mapas de profundidade e grades de preenchimento
- Criação de trajetória de evasão de obstáculo
Qualquer desenvolvedor pode:
- Alterar o estado do drone criando missões de vôo
- Alterar o modo de navegação
- Adicionar processos Linux embarcados (para exemplo, transfira dados pelo canal 4G ou use visão computacional)
O Air SDK suporta a linguagem de programação C ou Python. Air SDK vem com guia de instalação detalhado e documentação API. Muitos exemplos de aplicação ilustram todas as possibilidades oferecidas por sua arquitetura única.
Ground SDK
Crie um aplicativo móvel poderoso
O Ground SDK é uma plataforma de software Ground Control Station (GCS) para dispositivos móveis (iOS e Android são suportados). Ele permite que qualquer desenvolvedor crie um aplicativo móvel para ANAFI Ai para controle subsequente do drone diretamente de um dispositivo móvel. Todas as funções do BVS (controle, vídeo, configurações) estão disponíveis por meio de uma API fácil de usar e totalmente documentada.
OpenFlight
Estação de controle terrestre de código aberto
Pela primeira vez, a Parrot abre o código-fonte para sua aplicação de estação de controle terrestre. OpenFlight é o núcleo de nosso famoso aplicativo FreeFlight 7 de código aberto. Isso permite que o desenvolvedor se concentre em adicionar sua própria funcionalidade e imediatamente tenha um aplicativo de aparência profissional pronto para publicar na AppStore.

OpenFlight contém:
- Todos UX FreeFlight 7
- Todas as configurações de interface
- Código para visualização 3D em tempo real de obstáculos
- Código para gerenciamento de comunicações 4G
- OpenFlight é publicado sob uma licença BSD-3 com um guia de instalação completo e documentação abrangente.
Sphinx
Simulação fotorrealística 3D
Parrot Sphinx é uma ferramenta avançada de simulação de drones. Os engenheiros do Parrot o usam para desenvolver e testar todos os recursos do ANAFI Ai. O conceito geral é simular o firmware real do drone com todos os seus sensores em um ambiente visual e fisicamente realista.

Parrot Sphinx permite:
- Simular todas as câmeras e sensores
- Simular mapas de profundidade e segmentação imagens
- Navegue por muitas cenas 3D realistas
- Conecte-se a diferentes tipos de controles remotos
- Use scripts para controlar a simulação
- Adicionar pedestres e veículos
- Visualize e registre dados de voo
- Ajuste os sensores da aeronave e os elementos físicos circundantes
- Controle o fator de tempo real
Parrot Sphinx é construído com base no padrão avançado componentes:
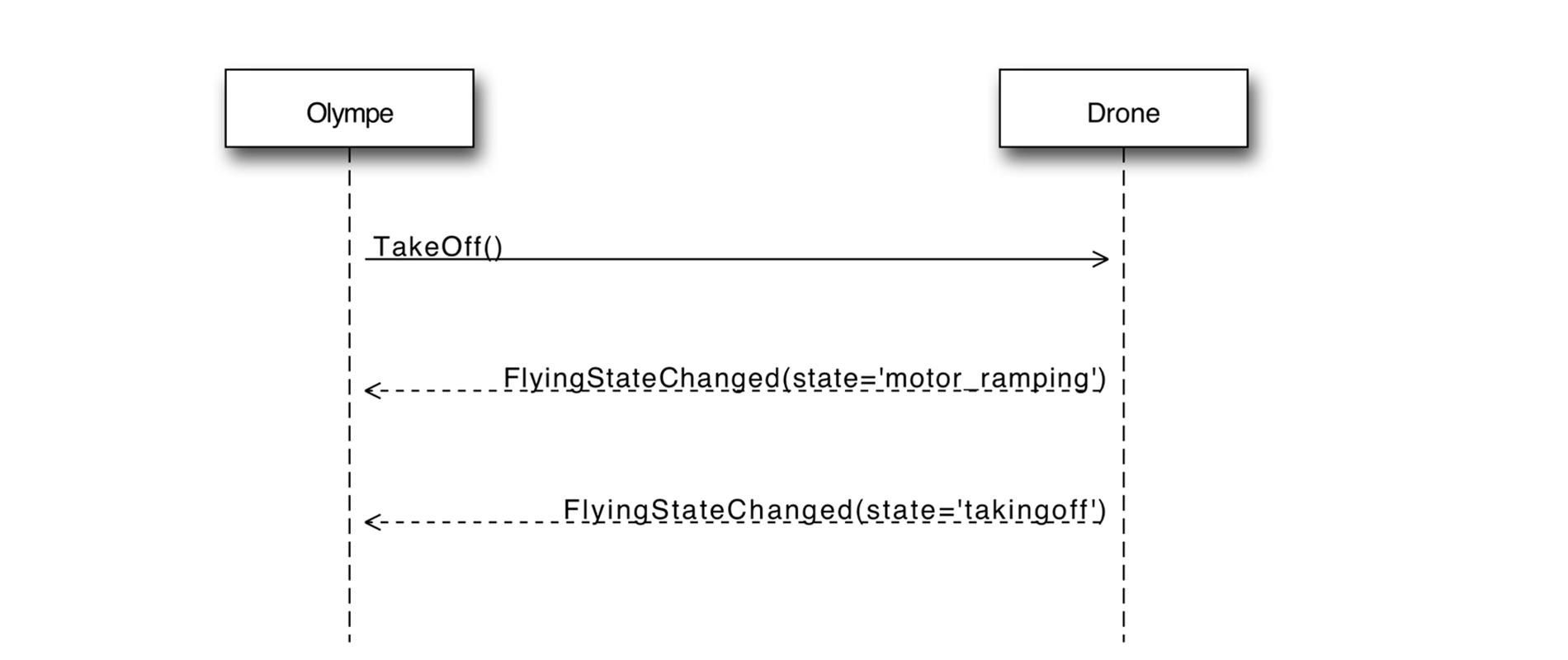
Olympe
Python para controlar ANAFI Ai
Olympe fornece uma interface de programação de controlador Python para ANAFI Ai. O objetivo original da Olympe era interagir com o ambiente de modelagem Sphinx. Olympe também pode controlar um ANAFI Ai físico de um computador remoto.
A estrutura Olympe permite:
- Conectar a Ai ANAFI simulada ou física
- Enviar mensagens de comando (pilotagem, orientação da câmera, Voltar para casa, Flight Plan)
- Iniciar e parar o streaming de vídeo de todas as câmeras
- Gravar stream de vídeo e metadados sincronizados
PdrAW
Advanced Media Player
PDrAW é um visualizador de vídeo avançado para mídia ANAFI Ai. O visualizador suporta streaming (RTP / RTSP) e vídeo gravado (MP4) nas plataformas Linux, macOS, Android e iOS. PDrAW vem como uma biblioteca (libpdraw), uma biblioteca wrapper (libpdraw-backend) e um executável autônomo (pdraw).
O PDrAW também gerencia metadados de vídeo. No ANAFI Ai, tanto o streaming quanto o vídeo gravado incluem metadados que estão publicamente disponíveis e documentados, permitindo processamento avançado de vídeo aéreo.
Modelos C. A. D.
A Parrot fornece modelos 3D de seus drones para integração em seu projeto CAD para prototipagem rápida e integração de acessórios.
Compatibilidade MAVLink e GUTMA
ANAFI Ai é compatível com o protocolo MAVLink v1 de código aberto padrão, que permite a troca de dados em tempo real entre o UAV e a estação de controle. ANAFI Ai pode ser controlado manualmente ou usando o planejamento de voo automático de uma estação base compatível com MAVLink, como QGroundControl.
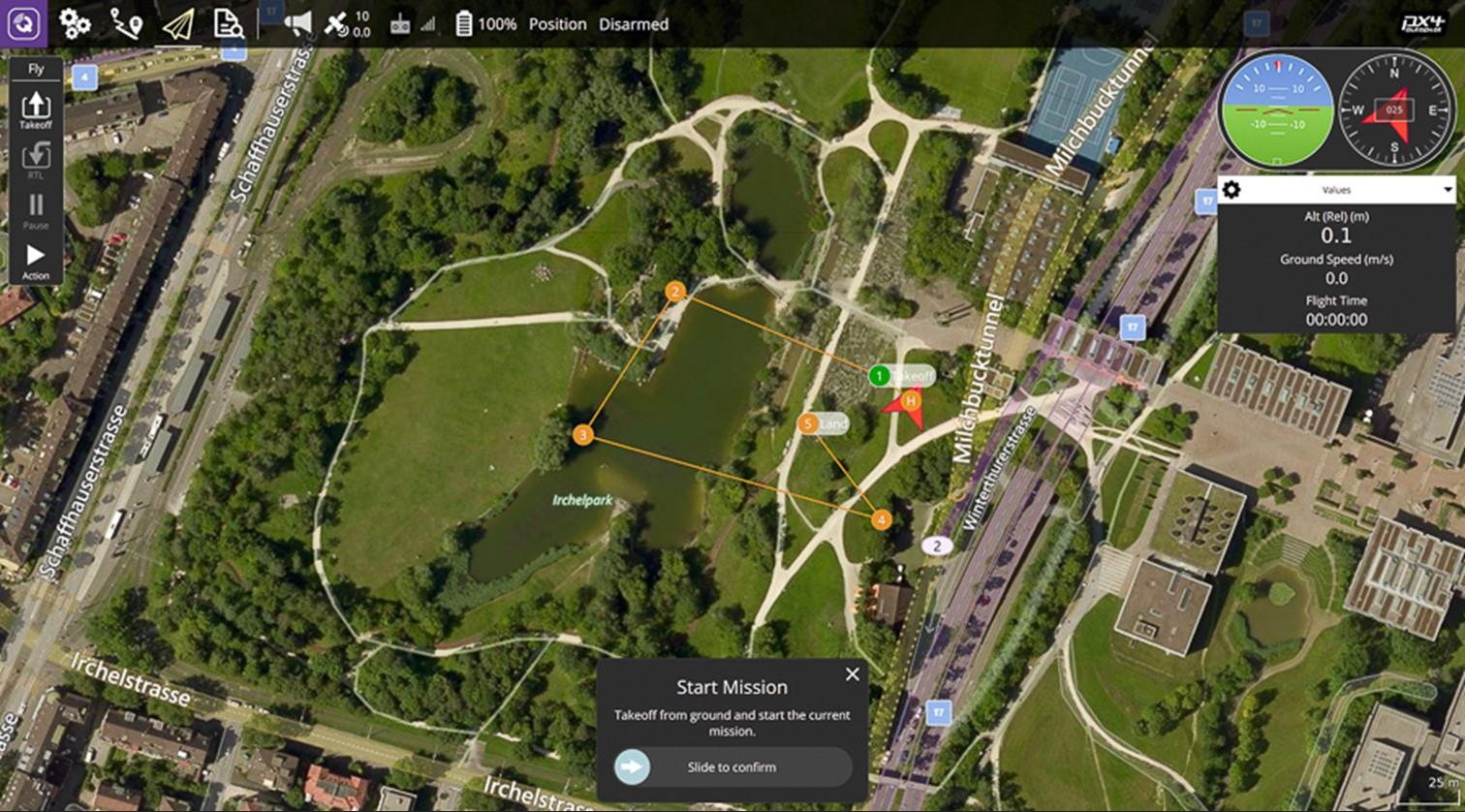
* Interface QGroundControl
ANAFI Ai é compatível com o protocolo de dados de voo padrão de código aberto GUTMA. A Global UTM Association é um consórcio de grandes atores no campo do controle de tráfego aéreo.

Maior ecossistema parceiro para drones Parrot
A Parrot continua a expandir o ecossistema global de fornecedores de software para drones por meio de seu programa SDK parceiro oferecendo soluções especializadas e exclusivas para as necessidades crescentes e em evolução dos usuários profissionais.
Parrot para todas as necessidades de negócios
Para obter o máximo do processo de inspeção, a Parrot oferece aos seus clientes um ecossistema de software de drones compatível, desde gerenciamento de frota, voo de compilação planejar e importar registros de voo, antes de fotografar, mapear, monitorar e analisar os dados recebidos.
PIX4D × Parrot
Aplicativos de modelagem 2D / 3D. Um conjunto exclusivo de aplicativos de fotogrametria móvel, desktop e nuvem.
Verizon x Skyward x Parrot
Solução de drone 4G LTE nos Estados Unidos. O primeiro drone robótico ANAFI Ai de seu tipo conectado à rede Verizon 4G LTE com software Skyward pré-instalado. Abre a porta para transferências de dados quase em tempo real, implantações remotas e voos fora da linha de visão.

Skyward × Parrot
Integração e aprendizagem dentro da capacidade ANAFI. Plataforma de gerenciamento de aviação incluindo espaço aéreo, acesso LAANC e treinamento, equipamentos e conectividade para implantação de frota de drones corporativos.

DroneSense × Parrot
Construir, gerenciar e dimensionar seus programas de drones. Profissionais de veículos aéreos não tripulados no setor de segurança pública podem usar o conjunto completo de recursos DroneSense, especialmente projetado para as necessidades dos primeiros socorros.

Parrot Ecosystem Partners

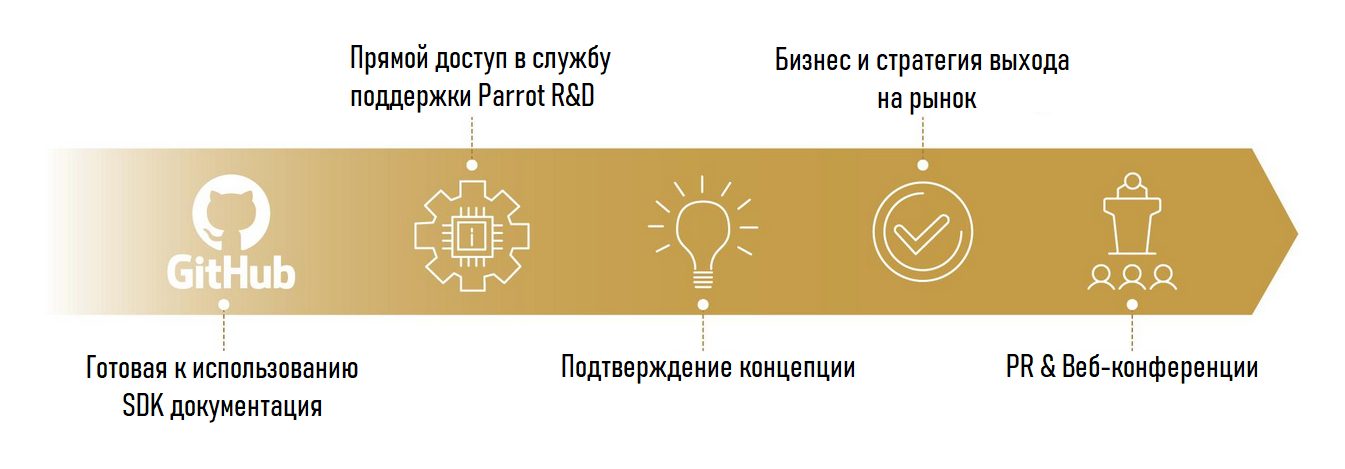
Parrot Affiliate Program
O desenvolvedor propõe expandir as capacidades de seu programa para drones integrando seu SDK.
Cibersegurança
Confidencialidade de dados
O desenvolvedor observa que ele não coleta quaisquer dados sem o consentimento dos usuários. A decisão de transferir ou não os dados para a infraestrutura do Parrot cabe exclusivamente aos próprios usuários. Os dados hospedados no Parrot permitem ao usuário sincronizar dados e planos de vôo entre diferentes dispositivos, além de facilitar o suporte e permitir que a Parrot aprimore seus produtos.
ANAFI Ai está em conformidade com o Regulamento Geral de Proteção de Dados da União Europeia (GDPR) e vai além, por exemplo, permite que você exclua todos os dados em um clique, proporcionando aos usuários o controle mais fácil. Esse problema de um clique é resolvido no aplicativo móvel FreeFlight7 ou nas configurações de privacidade da conta Parrot. Cloud. Assim, os usuários a qualquer momento podem não apenas interromper a troca de dados, mas também solicitar facilmente sua exclusão.
Se o usuário consentir com a troca de dados, o seu processamento será realizado em um formato totalmente transparente, descrito em detalhes na Política de Privacidade da Parrot.
Quando ANAFI Ai é conectado ao Skycontroller 4 via 4G, a infraestrutura do Parrot é usada para emparelhar o drone e o controlador remoto. Se o usuário não estiver conectado a uma conta Parrot. Cloud, ele ainda pode usar uma conexão 4G com uma conta temporária exclusiva. Ao usar a infraestrutura Parrot para emparelhamento 4G, o vídeo é criptografado usando uma chave acordada entre o drone e o controle remoto, o Parrot não tem acesso a vídeo não criptografado.

Em conformidade com FIPS140-2 e CC EAL5 Secure Element
ANAFI Ai tem um elemento de segurança Wisekey integrado que é compatível com NIST Certificado FIPS140-2 Nível 3 e Common Criteria EAL5. Um elemento de segurança semelhante também está embutido no hardware de controle do Skycontroller 4.
Funções do elemento de segurança:
- Executa operações criptográficas
- Armazena e protege informações confidenciais
Ele usa uma chave ECDSA pessoal com parâmetros de domínio P521, que é exclusivo para cada drone. Não pode ser extraído do elemento de segurança. E o certificado associado a esta chave é assinado por uma autoridade de certificação.
O Wisekey protege a integridade do firmware, fornece identificação única de drones para emparelhamento 4G e autenticação forte, e assinatura digital exclusiva de fotos tiradas pelo drone.

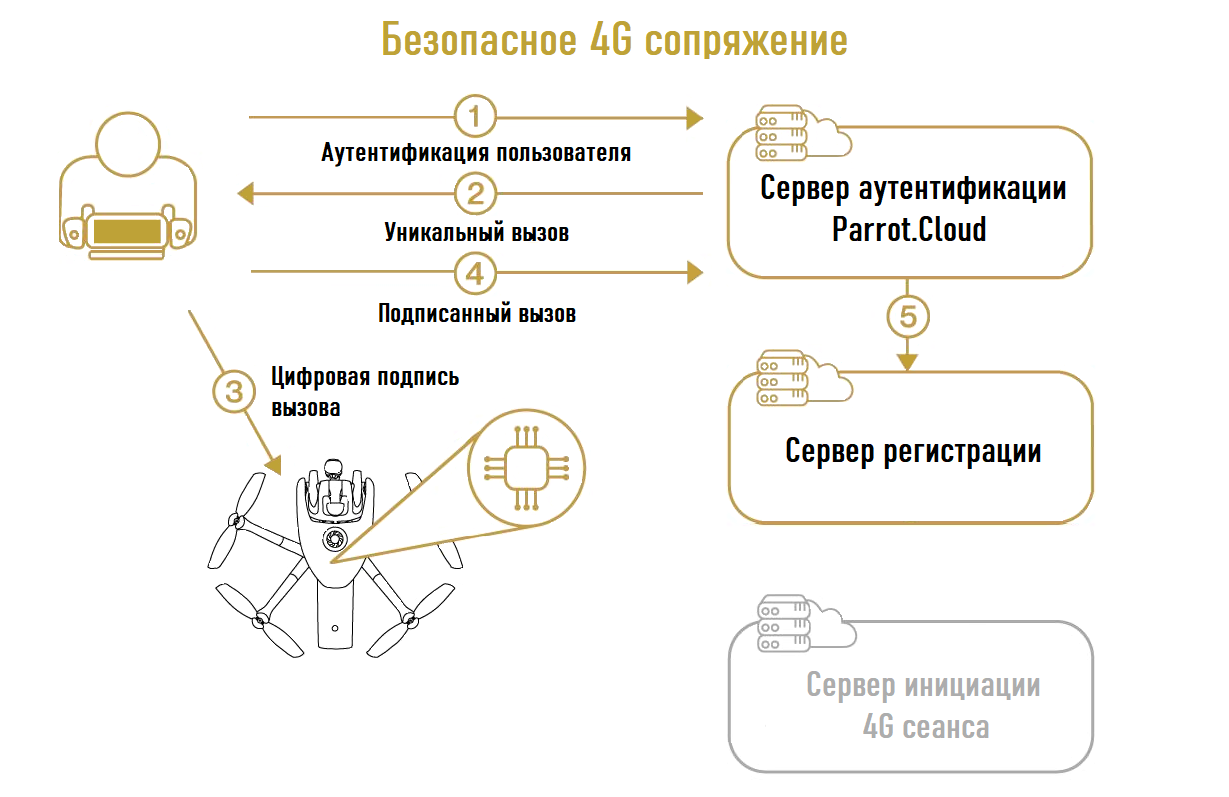
Conexão segura 4G e autenticação forte
o processo de emparelhar dispositivos com segurança. Durante esse processo, o usuário confirma de forma confiável que está conectado a um drone específico. Graças ao ANAFI Ai Secure Element, ele pode fazer isso sem inserir uma senha dentro do drone.
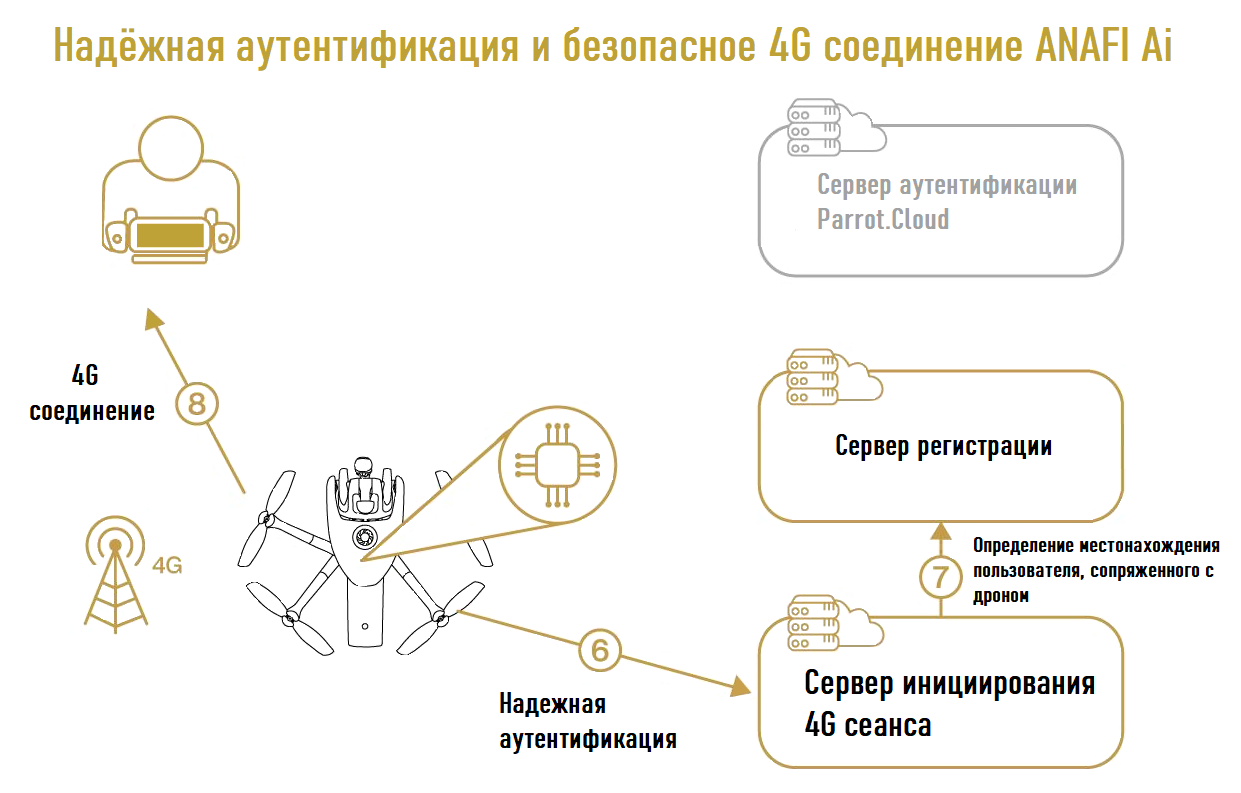
Os servidores Parrot então registram a comunicação entre o usuário e o drone. Quando a conexão Wi-Fi entre o usuário e o drone é perdida, ANAFI Ai mudará automaticamente para a conexão 4G. ANAFI Ai executa autenticação forte em servidores Parrot usando sua chave privada armazenada no Elemento Seguro. Os servidores Parrot procuram usuários conectados e fornecem interface entre ANAFI Ai e Skycontroller 4.
Para proteger o controle de drones e fluxos de vídeo vindos do Skycontroller 4, o ANAFI Ai suporta os protocolos TLS, DTLS e SRTP.
Inicialização e atualização seguras
A sequência de inicialização da aeronave está protegida: o sistema verifica que usa o software Parrot e que este software não foi adulterado. Uma verificação de segurança é executada em cada inicialização. O serviço de atualização também controla a assinatura digital de atualizações de software.
Configurando chaves de usuário no Elemento Seguro
Os usuários ANAFI Ai têm acesso a uma conta de operador especial Elemento Seguro. Esta conta é usada para configurar chaves que são relevantes para este usuário. Os usuários podem configurar o Elemento Seguro com as chaves públicas dos provedores de missão em que confiam. ANAFI Ai só realizará missões que sejam assinadas com essas chaves. Esse processo evita que os invasores executem missões de voo maliciosas no drone.
Fotos assinadas digitalmente
O Elemento Seguro da ANAFI Ai pode assinar digitalmente imagens de drones. Esta assinatura é a prova de que:
- A referida imagem assinada foi obtida pelo veículo aéreo não tripulado indicado.
- Nem a própria imagem nem seus metadados foram processados (voluntariamente ou não) - os metadados, também conhecidos como EXIF e XMP, contêm informações sobre a data, hora e localização da imagem.

Em outras palavras, a assinatura digital protege todos os dados relacionados à imagem, incluindo o local e a hora em que foi tirada, e qual drone ANAFI Ai.
Os usuários e também os parceiros que oferecem soluções de software usando a fotografia do drone podem verificar a assinatura digital das fotos ANAFI Ai com o certificado do drone ou através do catálogo de chave pública fornecido pela Parrot.
Transparência e verificações de segurança contínuas com Bug bounty
O Parrot usa protocolos e formatos de arquivo padrão sempre que possível. Não há código ofuscado ou recursos ocultos. Isso permite ao usuário entender como os produtos Parrot funcionam e testar sua segurança. Além disso, o OpenFlight, o software usado para controlar o drone, é de código aberto, dando aos usuários controle total.
Em abril de 2021, a Parrot lançou o Bug Bounty Program com YesWeHack, a primeira plataforma de segurança de crowdsourcing da Europa. Por meio dessa parceria, a Parrot aproveita a vasta comunidade de pesquisa de segurança cibernética da YesWeHack para identificar vulnerabilidades em potencial em seus drones, aplicativos móveis e serviços da web.
O programa Bug Bounty consiste em duas fases:
Programas privados inicialmente fornecem acesso exclusivo para selecionar pesquisadores de segurança e incluem futuros modelos de drones Parrot. A experiência e as diversas habilidades dos pesquisadores confirmarão o alto nível de segurança dos produtos antes de entrarem no mercado, o que ajudará a melhorar a segurança dos usuários do Parrot e a proteção de seus dados.
Após esta primeira rodada do programa privado Bug Bounty e após a comercialização, os produtos vão para o programa público. Sua segurança é então rigorosamente examinada por toda a comunidade YesWeHack de mais de 22.000 pesquisadores de segurança cibernética.

Gerenciamento de dados
Parrot Cloud permite que os usuários que optam por compartilhar seus dados gerenciem dados de voo e frota, bem como multimídia dados recebidos por seus drones.
Dados coletados
A Parrot Cloud coleta 4 tipos de dados:
Estático (dados do produto):
- Aeronave número de série
- Número de série da bateria
- Versão do firmware da aeronave e da bateria
- Versão do hardware da aeronave e da bateria
- Modelo do dispositivo
- Versão 7 do FreeFlight Versão
Eventos
- Alertas: Bateria, piloto automático, sensores
- Comunicação: conectar / desconectar, iniciar streaming, alerta de interferência, sinal fraco
- Câmera: estatísticas de streaming, alterações de configuração
- Voo: mudança de estado (decolagem, pouso, pairando, etc.), ativação de uma tarefa de vôo (plano de vôo, fotogrametria)
"Imagens contextuais"
- Timelapse- instantâneo e (uma vez a cada 2 minutos)
- Aprendizado profundo (mapeamento de mais objetos, paisagens para melhorar a autonomia de voo, rastreamento, evasão de obstáculos)
- Stereovision (mapa de profundidade)
- Imagens acionadas por evento
- Início e fim de declarações precisas de pairar, pouso preciso
- Acidente de drone
- Os rostos são borrados automaticamente durante a transmissão
Telemetria
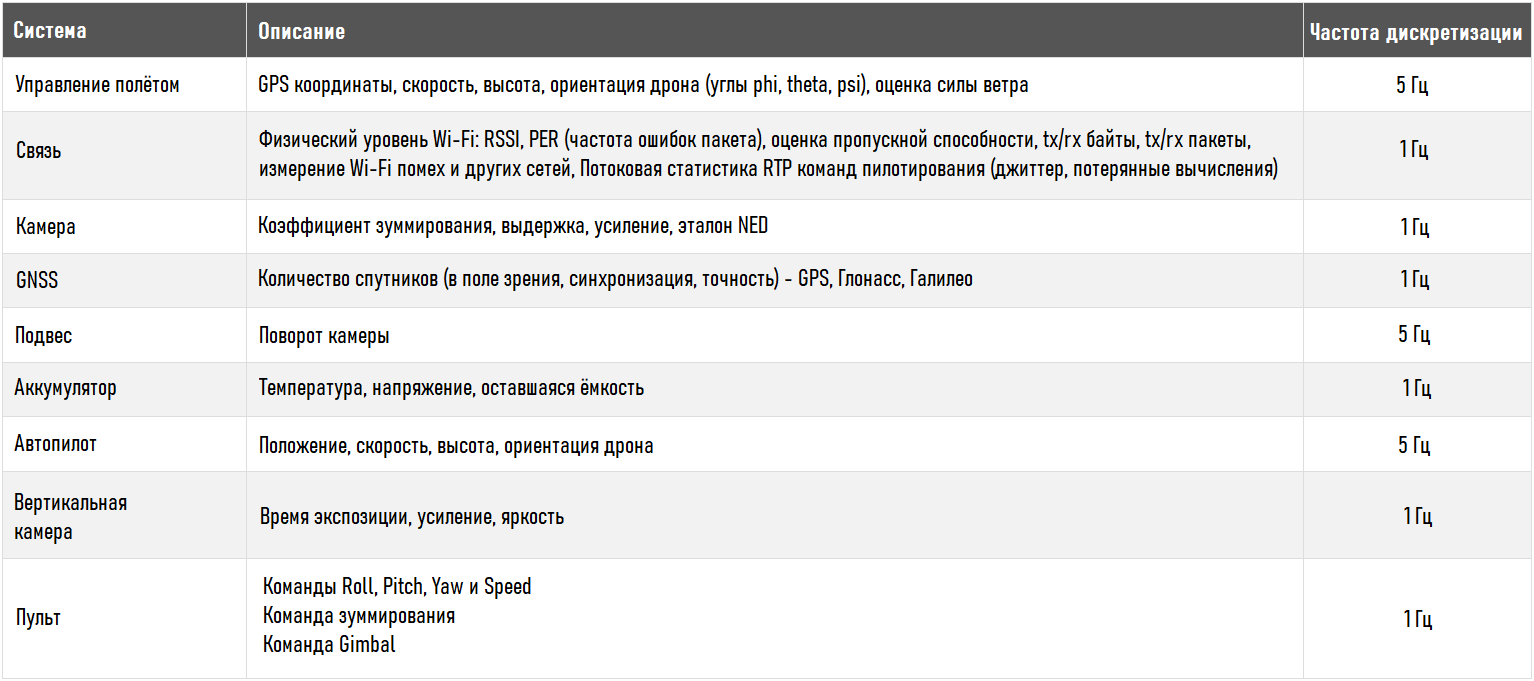
Uso final dos dados coletados
A Parrot apenas coleta e usa dados de clientes que concordaram em compartilhá-los para melhorar a qualidade de seus produtos...
Gerenciamento da Manutenção
Manutenção Preventiva: Nossas ferramentas coletam todas as informações relacionadas às missões (tipo de missão, tempos de decolagem e pouso, número de missões, localização do drone, velocidade de voo, plano de vôo e configurações do AirSDK). Isso permite que você receba informações precisas sobre o status da frota de drones ANAFI Ai (bem como seus controladores e baterias) em tempo real.
Manutenção corretiva: As informações coletadas são úteis para determinar rapidamente o status de um drone ou bateria em particular.
Enhancing Artificial Intelligence (AI)
Os elementos AI de ANAFI Ai (PeleeNet, redes convolucionais, etc.) oferecem aos usuários serviços e recursos incomparáveis: prevenção de obstáculos, rastreamento de alvos, vários modos de voo. A qualidade da IA depende da quantidade e qualidade dos dados coletados (imagens e vídeos): esses dados alimentam o aprendizado de máquina. A este respeito, a qualidade dos dados não é o único elemento decisivo: os metadados associados a esses dados também são fundamentais. Por esse motivo, nossa ferramenta coleta imagens e metadados regularmente e dependendo dos eventos, em um total de 30 a 50 MB por minuto.
Características de voo
Características aerodinâmicas
Unidades e aerodinâmica
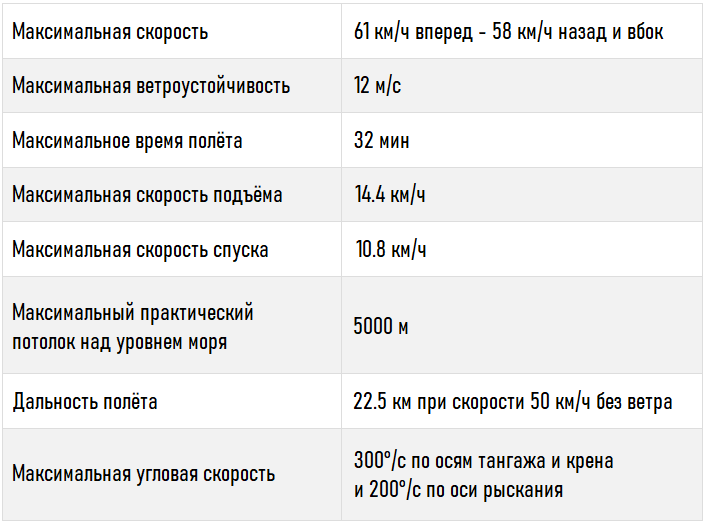
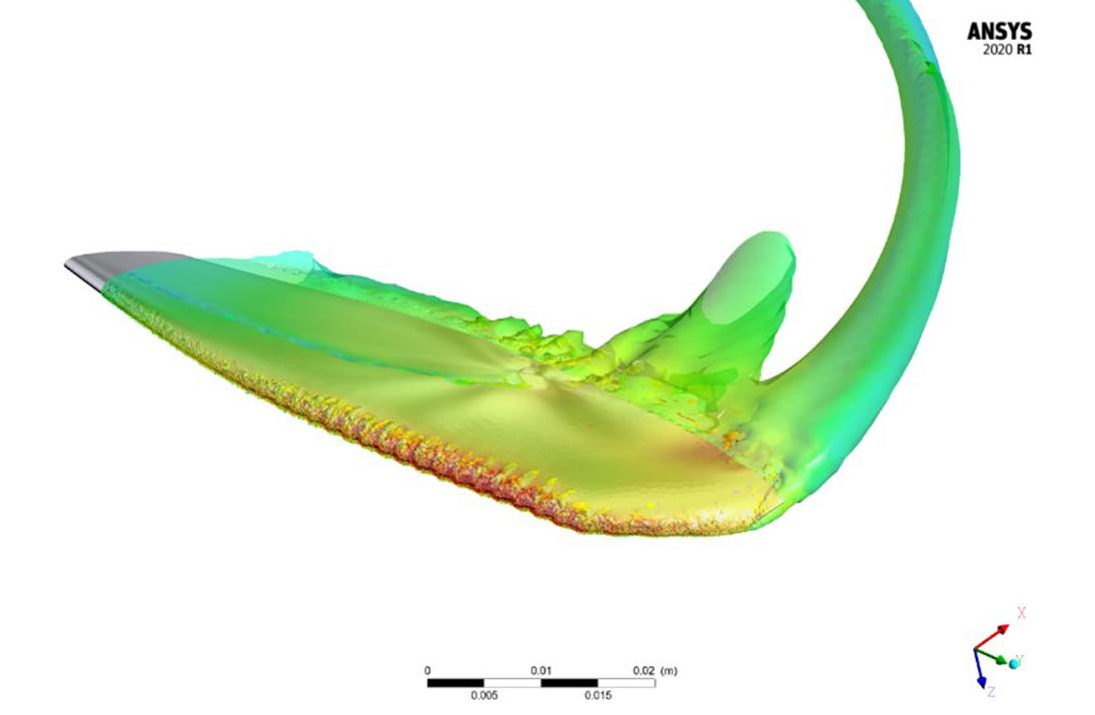 Imagem CFD de pás de hélice ANAFI Ai
Imagem CFD de pás de hélice ANAFI Ai
Novas pás de hélice biomimética com baleias de ponta jubarte. Essa abordagem possibilitou aumentar a eficiência propulsiva da usina, que na saída proporcionou um aumento do empuxo na mesma velocidade de rotação. Este efeito é comparável a um aumento no diâmetro do rotor.
O ruído acústico, especialmente o ruído tonal, proveniente da borda de ataque também é reduzido. Portanto, ANAFI Ai é mais silencioso [71,5 dB SPL (A) a 1 m] do que Skydio 2 [76,4 dB SPL (A) a 1 m].
- Tempo de vôo superior a 32 minutos
- Graças às características aerodinâmicas otimizadas da fuselagem e do sistema de propulsão ANAFI Ai, a velocidade máxima em vôo para a frente é de 61 km / h, com vôo lateral e vôo para trás 58 km / h
- Máx. resistência ao vento 12,7 m / s.
- Graças à alta eficiência de torque do motor / hélice e alta autonomia da bateria, o alcance é de 22,5 km (a uma velocidade constante de 50 km / h em clima calmo).
 Imagens CFD de feixes Ai ANAFI
Imagens CFD de feixes Ai ANAFI
Sensores
Para garantir um voo seguro ANAFI Ai está equipado com:
- 2 × IMU (ICM-40609-D e ICM42605)
- Magnetômetro LIS2MDL
- Módulo GPS UBX-M8030
- TI OPT3101 tempo de voo (ToF)
- Barômetro LPS22HB
- Câmera vertical
Características do sensor
Voo IMU: ICM-40609-D
- Giroscópio de 3 eixos
- Faixa: ± 2000 ° / s
- Resolução: 16,4 LSB / ° / s
- Offset / Precisão: ± 0,05 ° / s (após calibração térmica e dinâmica)
- Acelerômetro de 3 eixos
- Faixa: ± 16g
- Resolução: 2.048 LSB / mg
- Offset / precisão: ± 0,5 mg (XY) ± 1 mg (Z) (após calibração térmica e dinâmica)
- Controle de temperatura s: sistema de aquecimento controlado em relação à temperatura ambiente, estabilizado em: ± 0,15 ° C
- Frequência de medição: 2 kHz
Magnetômetro: LIS2MDL
- Faixa: ± 49,152G
- Resolução: 1,5 mG
- Offset / Precisão: ± 15 mG (após a compensação, na velocidade máxima do motor)
- Frequência de medição: 100 Hz
Barômetro: LPS22HB 1
- Faixa: 260 a 1260 hPa
- Resolução: 0,0002 hPa
- Offset / precisão: ± 0,1 hPa
- Controle de temperatura: sistema de aquecimento controlado em relação à temperatura ambiente, estabilizado em: ± 0,2 ° C
- Frequência de medição: 75 Hz
- Ruído de medição: 20 cm RMS
GNSS: UBX-M8030 1
- Antena de remendo de cerâmica 25 × 25 × 4 mm, permitindo melhoria de ganho de 2 dB em relação a ANAFI 1
- Sensibilidade: partida a frio -148 dBm / rastreamento e navegação: -167 dBm
- Tempo para a primeira correção: 40 segundos
- Exatidão / Exatidão: Posição (desvio padrão 1,4 m), Velocidade (desvio padrão 0,5 m / s)
Câmera vertical
- Sensor de imagem formato: 1/6 polegada
- Resolução: 640 × 480 pixels
- Sensor de imagem com obturador global
- Preto e branco
- FOV: ângulo de visão horizontal: 53,7 ° / ângulo de visão vertical: 41,5 °
- Distância focal: 2,8 mm
- Medindo a velocidade do fluxo óptico no solo a 60 Hz
- 15 Hz e ajuste de precisão @ 5Hz
ToF: TI OPT3101
- Faixa: 0-15m
- Resolução: 0,3 mm
- Precisão b: ± 2 cm (após calibração)
- Frequência de medição: 64 Hz
Câmera vertical IMU: ICM-42605
- Giroscópio de 3 eixos
- Faixa: ± 2000 ° / s
- Resolução: 16,4 LSB / ° / s
- Offset / precisão: ± 0,1 ° / s (após dinâmica Calibração)
- Acelerômetro de 3 eixos
- Faixa: ± 16g
- Resolução: 2,048 LSB / mg
- Offset / Precisão: ± 2,0 mg (XY) ± 5,0 mg (Z) - após calibração dinâmica
- Frequência de medição: 1 kHz
- Sincronização de hardware com câmera vertical, precisão: 1 μs
Piloto automático
O ANAFI Ai Flight Controller fornece pilotagem simples e intuitiva: nenhum treinamento é necessário para operá-lo. Ele permite que você automatize vários modos de voo (plano de voo, cameraman, decolagem manual, Smart RTH). Os algoritmos de fusão de sensores combinam dados de todos os sensores para estimar a razão, altitude, posição e velocidade ANAFI Ai.
A avaliação da condição é essencial para o funcionamento adequado dos drones. Quadcopters são inerentemente instáveis quando o controlador de vôo é usado com um loop aberto; para controlá-los facilmente, sem falar no controle autônomo, é necessário estabilizá-los usando algoritmos de controle em malha fechada. Esses algoritmos calculam e enviam os comandos aos motores exigidos pelo ANAFI Ai para atingir as trajetórias desejadas.

Voo interno
Na ausência de um sinal de GPS, ANAFI Ai depende principalmente de medições de câmeras verticais para estimar a velocidade e a posição. O desempenho da câmera vertical é determinado por dois algoritmos principais:
- Fluxo óptico para estimativa de velocidade
- Detecção de ponto-chave e correspondência para estimativa de posição
Câmera vertical algoritmos podem funcionar em condições de pouca luz graças ao ANAFI Ai equipado com um par de luzes LED localizadas ao lado da câmera vertical. Eles permitem que o drone permaneça estável, especialmente ao voar em ambientes fechados ou na ausência de GPS, a uma altitude inferior a 5m acima do solo. A potência das luzes LED se adapta automaticamente, dependendo das necessidades do algoritmo.
Voo autônomo
Características principais
- Sistema de detecção rotativa com amplo campo de visão
- Extração da profundidade do espaço circundante com base no alinhamento estereoscópico e na profundidade por movimento
- Representação do ambiente na forma de uma grade de preenchimento
- Detecção autônoma e evitação de obstáculos em velocidades de até 29 km / h
Este capítulo detalha os sensores, hardware e algoritmos usados pela ANAFI Ai para permitir o vôo autônomo. Está organizado da seguinte forma:
- Uma descrição detalhada do sistema de percepção ANAFI Ai
- Algoritmos de percepção usados para reconstruir o ambiente 3D em torno dos drones
- Reprogramação e obstáculo evasão

Estratégia do sistema de percepção
A percepção do ambiente tridimensional é uma habilidade chave para alcançar o vôo autônomo, especialmente em espaços confinados. É um pré-requisito para a detecção e prevenção garantidas de obstáculos, o que reduz a carga do operador do drone, aumenta o sucesso da missão e garante a segurança da aeronave.
Liberar todo o potencial de uma câmera voadora, que pode se mover e girar livremente em todas as direções sem restrições, requer uma solução de detecção eficaz. Em particular, o sistema de detecção deve ser capaz de receber informações sobre o ambiente em direções que correspondam ao movimento de avanço em vôo - independentemente da orientação da câmera.
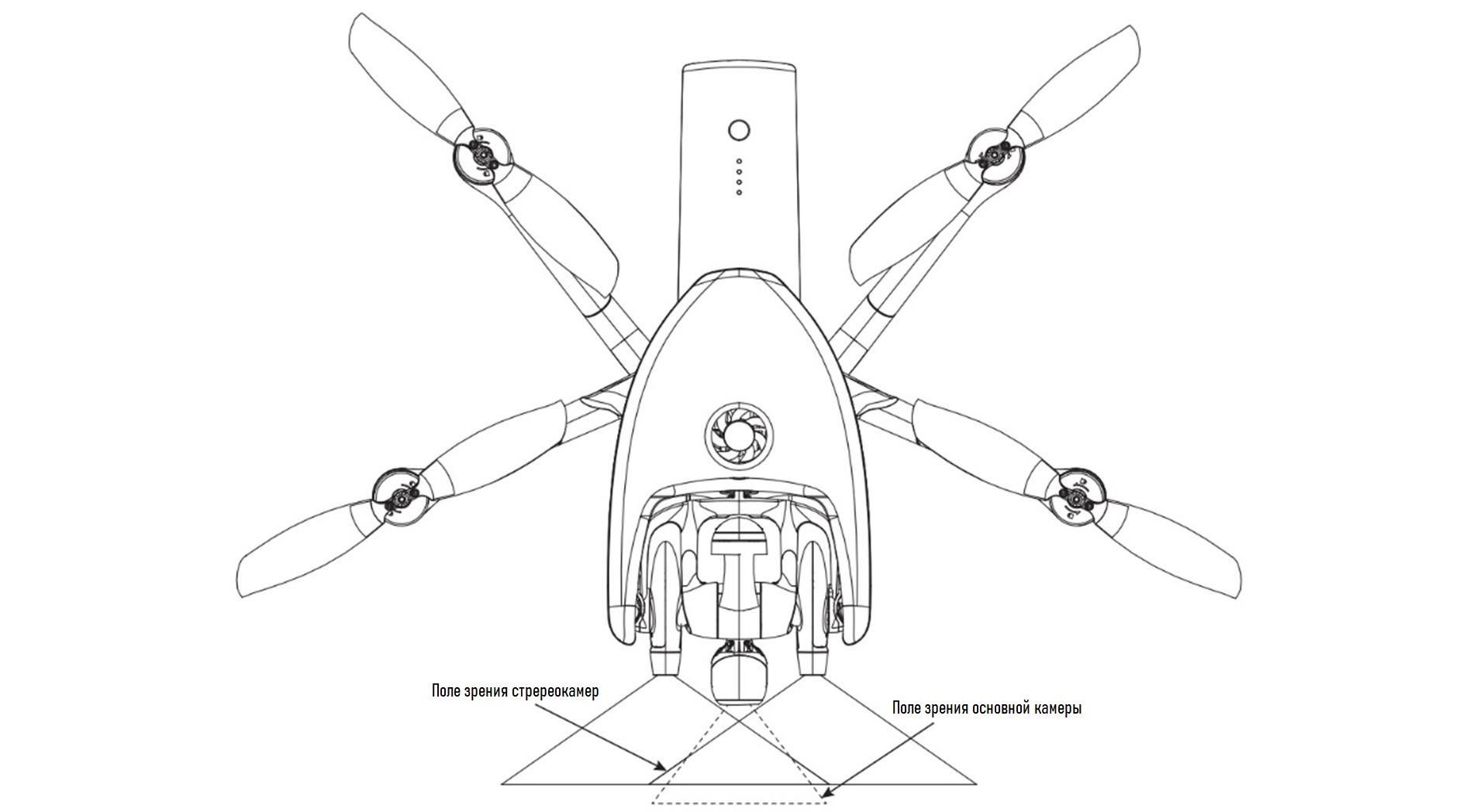
ANAFI Ai depende de uma solução técnica única baseada em dois balancins mecânicos para separar a orientação da câmera principal e do sistema de detecção:
- A câmera principal é montada em um 3- eixo cardan, tornando a orientação 3D independente da orientação do drone.
- O sistema de detecção é montado em um gimbal de eixo único - conectado ao movimento de guinada do drone, pode ser orientado em qualquer direção.
 ANAFI Ai estabilizador duplo para percepção e visualização.
ANAFI Ai estabilizador duplo para percepção e visualização.
Os eixos de inclinação dos dois suspensores são colineares e combinados para obter um design ultracompacto.
Graças a esta solução, é possível direcionar a câmera principal e o sistema de detecção em duas direções diferentes. Este projeto evita o uso de câmeras caras nas laterais, superior, inferior e traseira do drone, ao mesmo tempo que fornece um grande campo de visão disponível para o sistema de detecção.
Esta seção está organizada da seguinte forma:
- Detalhes dos sensores usados para o sistema de detecção
- Especificações para o gimbal da câmera principal e o gimbal do sistema de detecção
- Estratégias para direcionar o sistema de detecção para explorar o potencial da estrutura de suspensão dupla
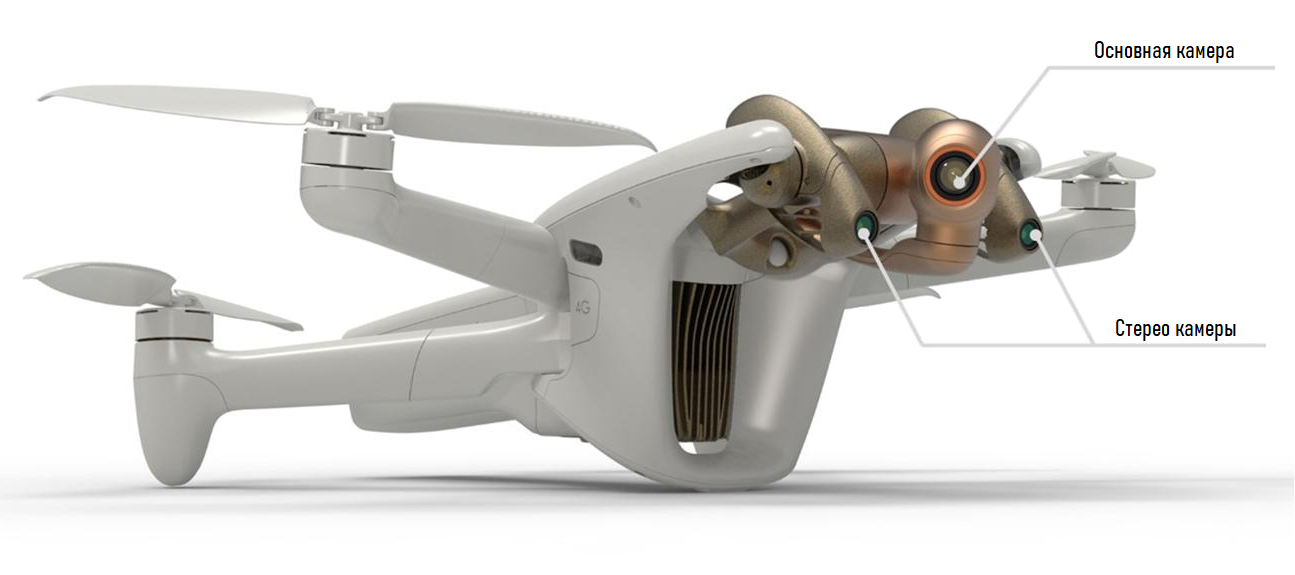
Sensores
O sistema de detecção é baseado em um par de câmeras idênticas com um eixo de inclinação...
 dobradiça mecânica de 1 eixo para sistema de detecção ANAFI Ai.
dobradiça mecânica de 1 eixo para sistema de detecção ANAFI Ai.
As especificações do sensor são as seguintes:
- Modelo: Onsemi AR0144CSSM28SUD20
- Cor: Monocromático
- Resolução: 1280 × 800 pixels
- Taxa de quadros: 30 fps
- Obturador global
- Campo de visão horizontal completo: 118 ° (110 ° utilizável para detecção)
- Campo de visão vertical completo: 72 ° (62 ° utilizável para detecção)
- Distância focal: 1,47 mm (0,039 polegadas - 492,94610 pixels)
- Abertura: f / 2.7
Especificações os pares estereoscópicos são os seguintes:
- Eixo de passo comum
- Linha de base / distância: 62 mm (2,44 polegadas)
- Captura síncrona a 30 fps

Dual Gimbal
O cardan mecânico da câmera principal é um pitch-rol mecânico de 3 eixos l-yaw "com as seguintes características:
- Limitadores de inclinação: -116 ° / 176 °
- Limitadores de rotação: / - 36 °
- Limitadores de guinada: / - 48 °
A suspensão mecânica do sistema de detecção é uma suspensão de eixo único com as seguintes características:
- Batentes finais no passo: -107 ° / 204 °
- Tempo de viagem de uma parada final para outra: 300 ms
O sistema de detecção tem curso de 311 ° (dos quais 296 ° não são mascarados pelo corpo do drone), o que permite o retorno percepção.
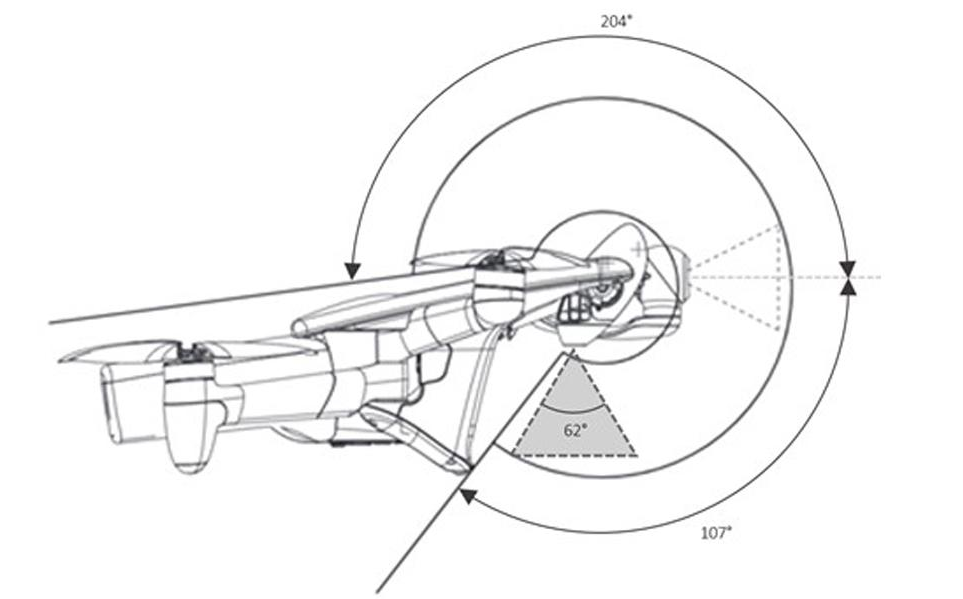
Campo de visão vertical instantâneo e sistemas limitantes de percepção ANAFI Ai.
O sistema foi projetado de tal forma que:
- As pás da hélice não entram no campo de visão da câmera principal
- O principal a câmera não cobre o campo de visão do sistema de percepção
- A câmera principal e o sistema de detecção podem ser totalmente dobrados para trás para proteger as lentes
 O campo de visão horizontal do sistema de percepção ANAFI Ai.
O campo de visão horizontal do sistema de percepção ANAFI Ai.
Ao inclinar-se para trás, o sistema de percepção se move para a posição mais alta, proporcionando assim uma visão clara.
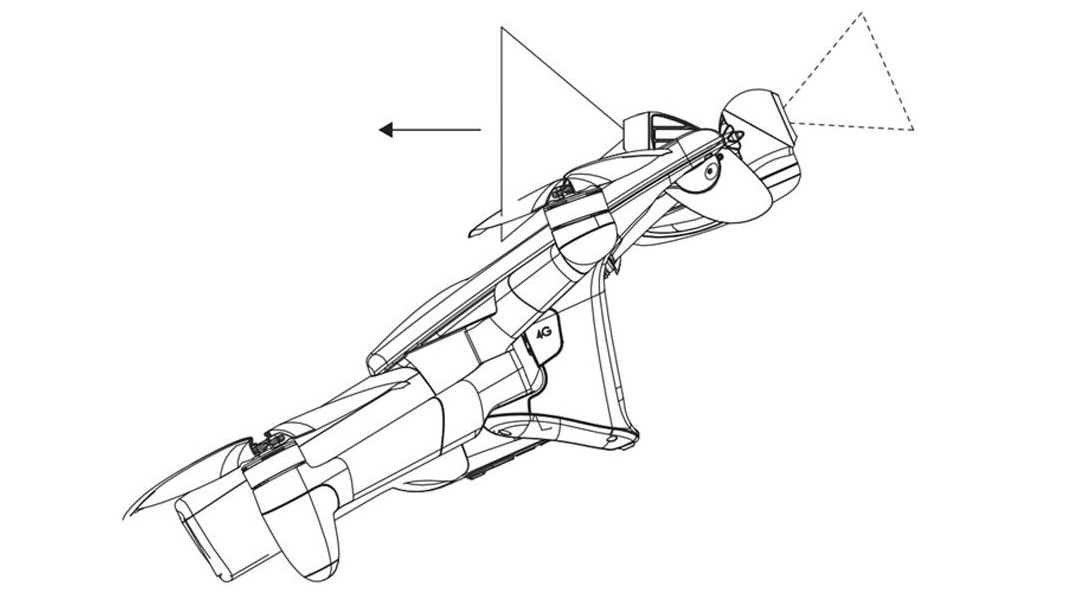
Percepção de ANAFI Ai em posição totalmente reclinada para vôo para trás.
Reconstrução do ambiente
A reconstrução do ambiente tridimensional circundante para o voo autônomo é realizada em dois estágios:
- Extração de informações de profundidade da percepção na forma de mapas de profundidade
- Combinando dados do mapa de profundidade em uma grade tridimensional de preenchimento
Dois métodos são usados para obter mapas de profundidade de sensores de percepção:
- Profundidade com base no alinhamento estéreo
- Profundidade do movimento
Profundidade da correspondência estereoscópica
O principal método de extração de profundidade as informações são baseadas na paralaxe entre duas câmeras estéreo do sistema de detecção. Ao fotografar o ambiente em uma direção, mas de duas posições diferentes, os objetos no campo de visão do sistema de percepção aparecem em posições diferentes nas imagens obtidas por duas câmeras. Quanto mais próximo estiver o assunto, maior será a diferença de posição.
Assim, a estratégia é determinar os pontos nas imagens obtidas pelas câmeras estéreo esquerda e direita correspondentes ao mesmo objeto no campo de visão do sistema de detecção, e medir a diferença na posição destas pontos nas duas imagens. Essa diferença é chamada de disparidade e é medida em número de pixels.
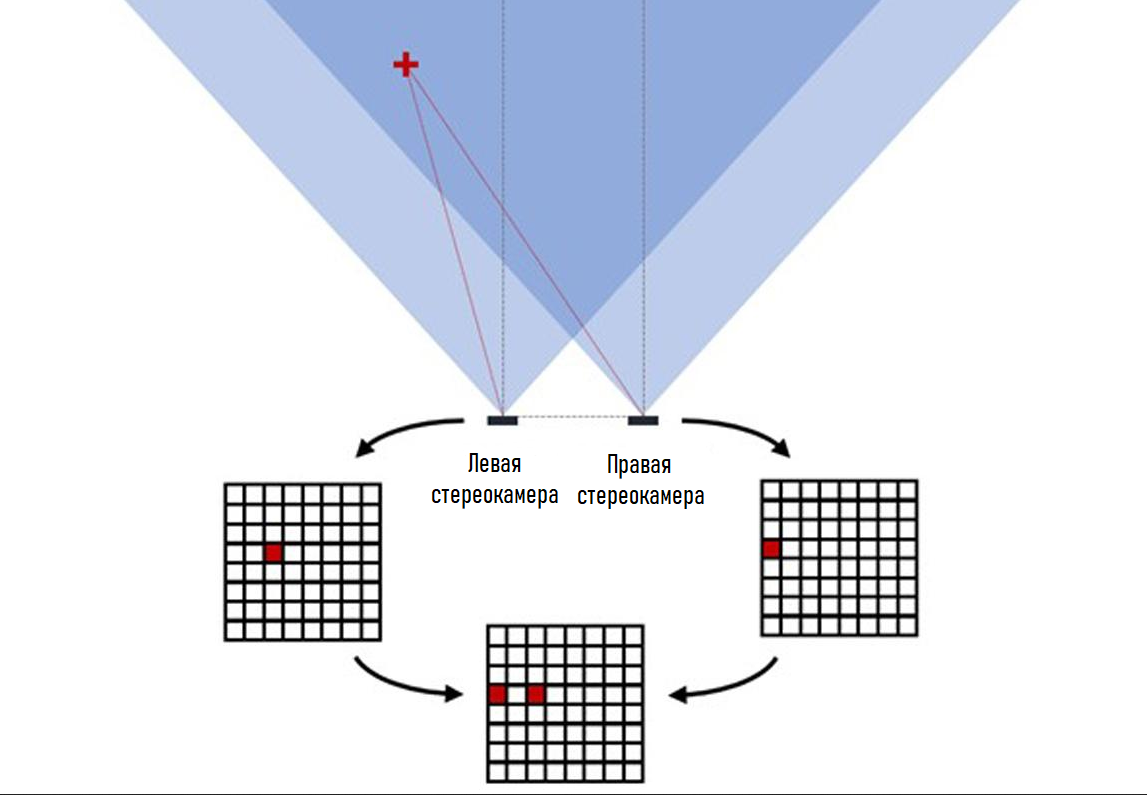 Ilustração do princípio da visão estéreo - o ponto 3D vermelho está em posições diferentes nas imagens esquerda e direita.
Ilustração do princípio da visão estéreo - o ponto 3D vermelho está em posições diferentes nas imagens esquerda e direita.
A disparidade pode então ser relacionada à profundidade de cada um desses pontos usando a seguinte relação profundidade = focal * linha de base / disparidade, onde a profundidade e a linha de base são expressas nas mesmas unidades, e o foco comprimento e disparidade são expressos no número de pixels.
O resultado do cálculo assume a forma de um mapa de profundidade de 176 × 90 pixels, para o qual o valor de cada pixel corresponde à profundidade em metros. O mapa de profundidade é atualizado em 30 Hz.
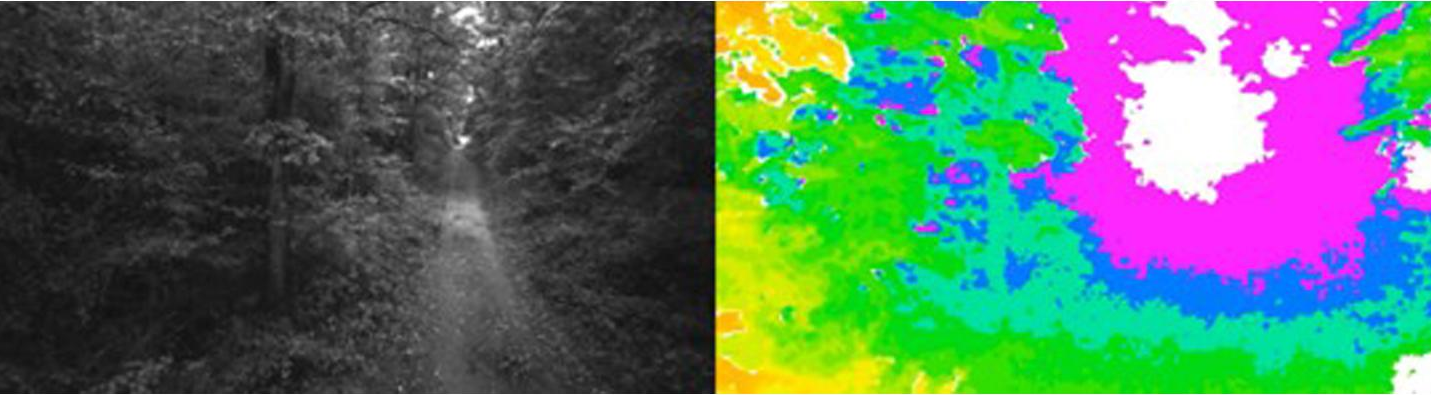
Um exemplo de uma imagem capturada pela câmera direita do sistema de detecção ANAFI Ai (esquerda) e a profundidade correspondente obtida usando imagem estéreo (direita). O mapa colorido vai do vermelho (mais perto) ao roxo (mais longe) - branco significa fora de alcance.
O resultado imediato disso é que a profundidade medida por esse método é discretizada, uma vez que a disparidade só pode assumir valores discretos (número de pixels). Um ponto 3D localizado longe o suficiente do sistema de percepção e criando uma disparidade teórica menor que um pixel será considerado infinito, uma vez que a disparidade discreta real correspondente será igual a 0. A precisão do método de comparação estéreo diminui com o aumento da distância, embora haja são métodos que podem reduzir esse fenômeno através da obtenção de amostragem de subpixel.
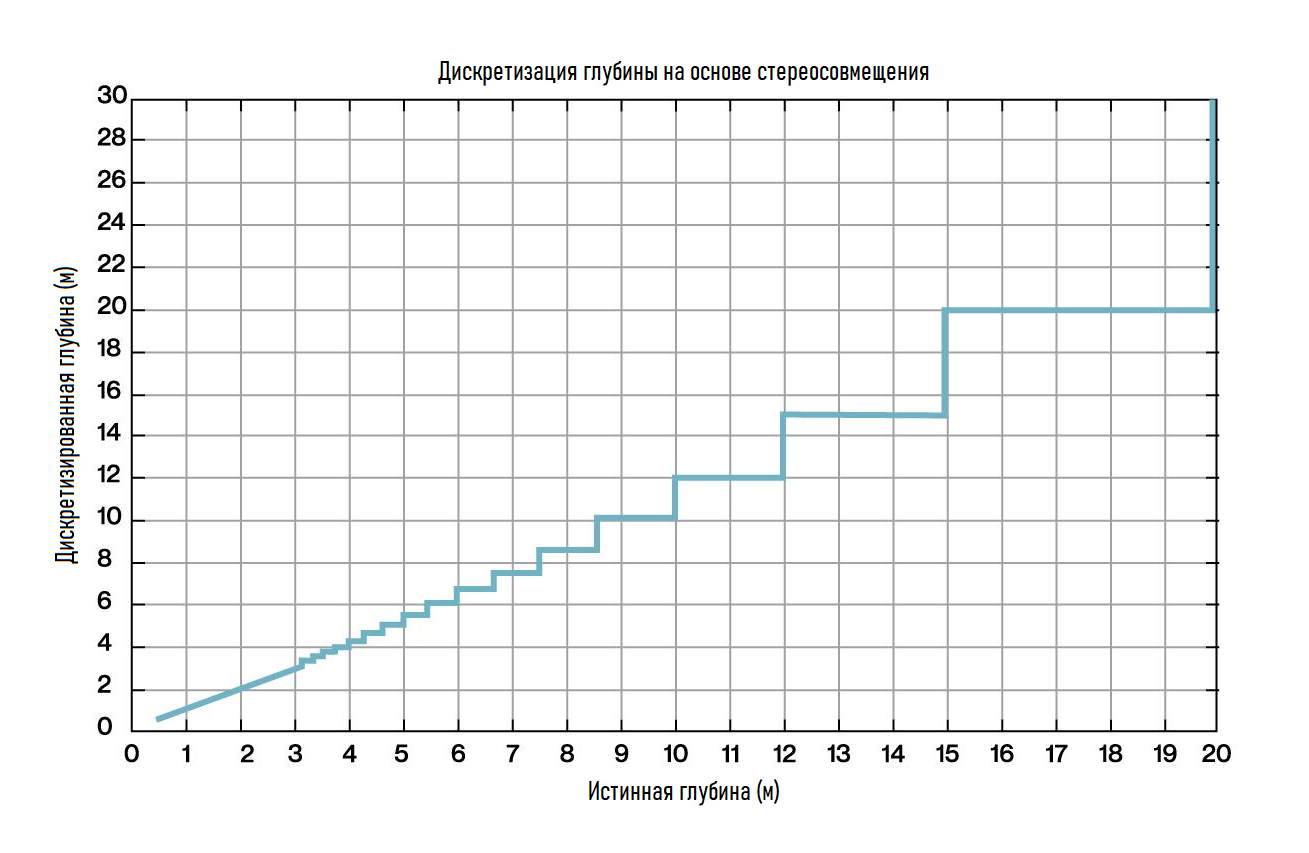 Profundidade discretizada medida por "alinhamento estéreo" versus "profundidade real".
Profundidade discretizada medida por "alinhamento estéreo" versus "profundidade real".
Além disso, a disparidade diverge conforme a profundidade se aproxima de zero. Como o número de pixels nas imagens é limitado, o valor da disparidade também é limitado. Como consequência, existe uma profundidade mínima na qual o sistema perceptivo é cego. Esta profundidade mínima é de 36 cm para ANAFI Ai.
Sobre a calibração: Cada par de câmeras estéreo é calibrado de fábrica para medir com precisão pequenas discrepâncias que possam existir entre as duas câmeras e compensá-las em cálculos de profundidade integrados.
O usuário também pode recalibrar um par de câmeras estéreo usando o padrão de teste fornecido com o drone. Em particular, até certo ponto, o drone é capaz de detectar possíveis erros de calibração que podem surgir durante sua vida. Neste caso, o software da aeronave tentará ajustá-los e compensá-los e, se isso falhar, aparecerá uma notificação solicitando que você recalibre.
Profundidade do movimento
O movimento do drone também pode ser usado para coletar imagens do ambiente de diferentes ângulos e, assim, reconstruir informações de profundidade. Essa técnica é chamada de profundidade do movimento, ou detecção monocular, porque uma única câmera em movimento é suficiente para coletar informações de profundidade.
O princípio de operação é semelhante à visão estereoscópica, mas em vez de comparar imagens do ambiente obtidas por diferentes observadores ao mesmo tempo, a percepção compara imagens do ambiente obtidas pelo mesmo observador em momentos diferentes. Se o drone estiver se movendo, as imagens desse observador único serão capturadas de diferentes ângulos. Sabendo a posição em que cada quadro foi tirado, é possível triangular pontos correspondentes ao mesmo recurso em diferentes imagens e devolvê-los ao 3D.
A saída é uma nuvem de pontos tridimensional contendo até 500 pontos para ANAFI Ai, gerados a uma frequência de 10 Hz.
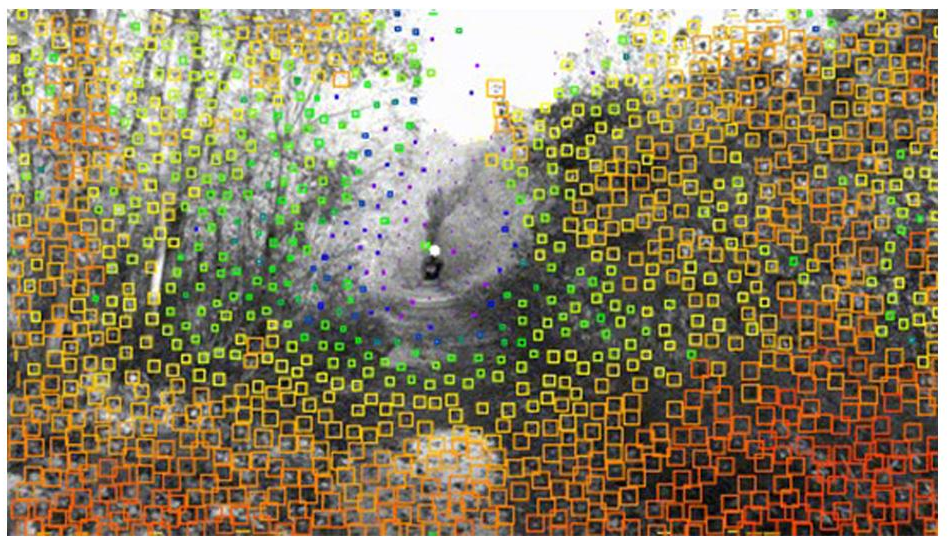 Um exemplo de uma nuvem de pontos criada com base na profundidade do movimento - o mapa de cores vai do vermelho (mais próximo) ao roxo (mais longe).
Um exemplo de uma nuvem de pontos criada com base na profundidade do movimento - o mapa de cores vai do vermelho (mais próximo) ao roxo (mais longe).
O algoritmo ANAFI Ai Motion Depth normalmente gera menos informações (nuvem de pontos esparsos) do que o algoritmo de correspondência estéreo e requer que o drone se mova para coletar informações. Além disso, este algoritmo não consegue extrair informações na direção exata do movimento (pelo menos para transmissões ao vivo), uma vez que os objetos nas imagens aparecem quase estáticos nesta direção (foco de expansão).
No entanto, ele tem uma faixa de detecção melhor (faixa teoricamente infinita) do que a correspondência estéreo.
Fill Grid
As informações de profundidade dos algoritmos de detecção estéreo e monocular são integradas ao Fill Grid. Esta malha mostra o ambiente 3D em cubos 3D chamados voxels. A cada voxel é atribuída a probabilidade de ser ocupado por um obstáculo ou, inversamente, de estar livre de um obstáculo.
Um algoritmo de transmissão de raio é usado para integrar informações de profundidade em uma grade de preenchimento. Para cada pixel do mapa de profundidade obtido como resultado da comparação estereoscópica, ele é convertido em um ponto tridimensional, e para cada ponto da nuvem de pontos - na profundidade obtida como resultado do movimento:
- Um raio é desenhado na grade de preenchimento da posição do sistema de percepção até a posição do ponto 3D.
- A probabilidade de um voxel contendo um ponto 3D ser ocupado é aumentada.
- A probabilidade de que todos os voxels atravessados por um raio diferente daquele que contém o ponto 3D sejam ocupados é reduzida.
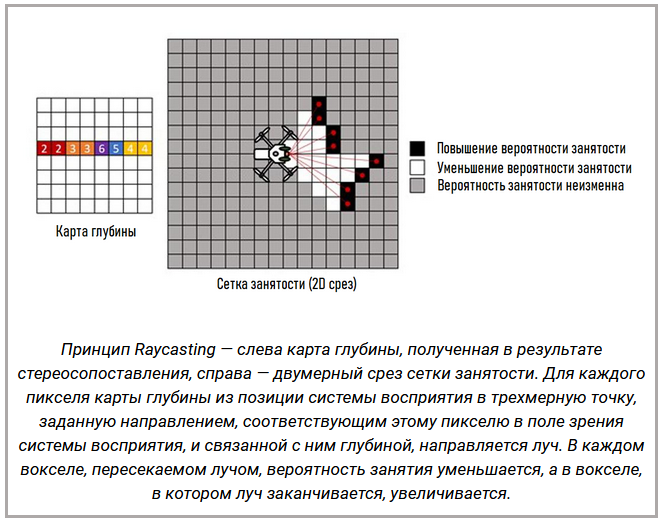
Assim, a grade atua como um filtro de tempo para informações de profundidade, absorvendo qualquer ruído potencial na medição de profundidade, e como uma memória de medições anteriores, o que permite você pode navegar em ambientes difíceis, mesmo na ausência de um campo de visão contínuo de 360 ° do sistema de percepção.
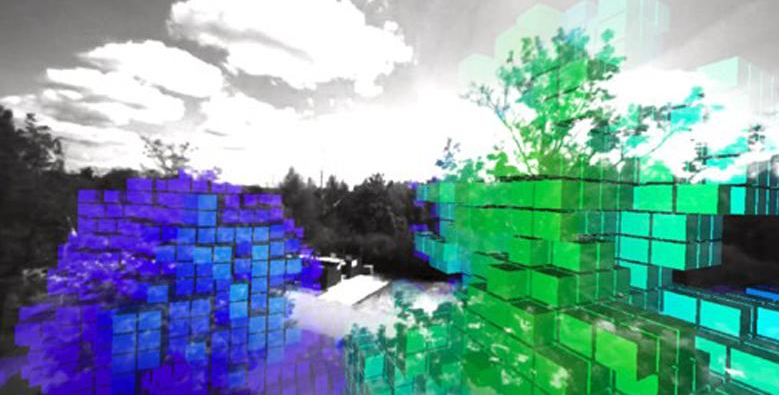 Um exemplo de uma grade de preenchimento. Os voxels são sobrepostos na visualização da câmera estéreo direita com um alto grau de certeza de que estão ocupados, variando de vermelho (próximo) a roxo (distante).
Um exemplo de uma grade de preenchimento. Os voxels são sobrepostos na visualização da câmera estéreo direita com um alto grau de certeza de que estão ocupados, variando de vermelho (próximo) a roxo (distante).
A grade de preenchimento é a base para os algoritmos de planejamento de movimento usados pela ANAFI Ai para vôo autônomo e prevenção de obstáculos.
Evitar Obstáculos
Graças ao conhecimento do ambiente 3D do drone armazenado na grade de preenchimento, ANAFI Ai pode evitar obstáculos. Isso fornece segurança adicional significativa para missões autônomas, mas também é útil para vôo manual, especialmente se a linha de visão entre o piloto e o drone estiver prejudicada.
A cada 30 ms ANAFI Ai prevê qual será o horizonte de tempo curto nominal no futuro. Essa previsão é inferida a partir dos links enviados pelo usuário, sejam eles comandos de vôo do controle remoto, waypoints para anexar a um plano de vôo ou uma trajetória de entrada. Então, usando o modelo de drone interno simulado, o algoritmo de reescalonamento calcula as menores correções possíveis para esta trajetória nominal prevista que a torna livre de colisões e viável para o drone.
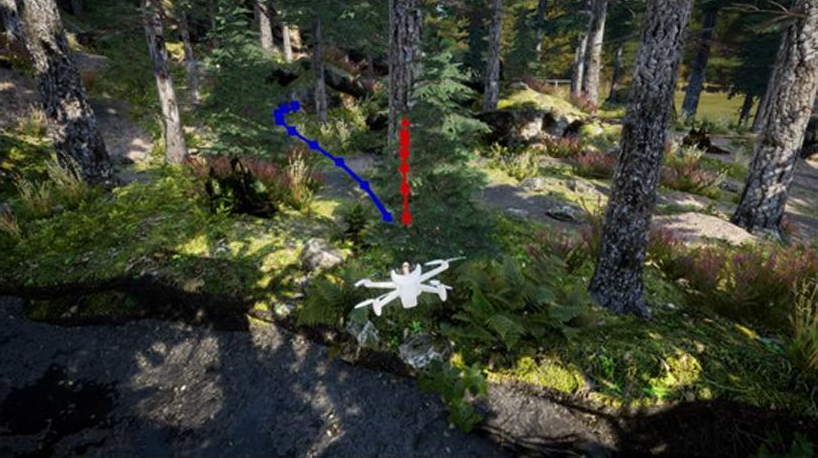 Um exemplo de uma trajetória ajustada calculada pelo algoritmo de prevenção de obstáculos em resposta a uma colisão da trajetória de referência com uma árvore.
Um exemplo de uma trajetória ajustada calculada pelo algoritmo de prevenção de obstáculos em resposta a uma colisão da trajetória de referência com uma árvore.
O sistema de prevenção de obstáculos ANAFI Ai foi projetado para operar em velocidades de até:
- Voo nivelado: 29 km / h
- Escalada: 14 km / h
- Descida: 11 km / h
O desempenho de prevenção é limitado na chuva ou vento forte, pouca luz ou navegação por satélite interrompida. Além disso, antes de voar, você deve se certificar de que as lentes do sistema de detecção estão limpas.
Missões de voo

Características principais
Ar SDK (consulteSeção SDK) permite que os desenvolvedores acessem todos os sensores de drones, câmeras, interfaces de conectividade e funções independentes. Portanto, eles podem personalizar o comportamento do drone para criar missões de vôo. Cada missão de vôo contém um conjunto de comportamentos ou modos básicos:
- No solo: Comportamento quando os motores estão parados, por exemplo, calibração do sensor.
- Decolagem: várias estratégias de decolagem
- Hover: manter um ponto fixo
- Voo: manual funções e vôo autônomo
- Pouso: várias estratégias de pouso
- Crítico: após a detecção de um estado crítico
As missões de voo personalizadas podem criar novos comportamentos ou reutilizá-los da missão padrão.
Preço e disponibilidade
O início das vendas do drone ANAFI Ai está programado para setembro de 2021. As informações de preço não foram divulgadas no momento. Continuamos monitorando as informações recebidas e, com certeza, atualizaremos esta seção em uma data posterior.

Baixe a documentação
Documentação do desenvolvedor:
- Baixe a documentação técnica completa do desenvolvedor
- Baixe a especificação do produto do desenvolvedor
Vídeos
Principais análises ANAFI Ai de o desenvolvedor e os usuários
Desempacotando e primeiro vôo.
Voo de teste do drone ao alcance com conexão 4G. O tempo total de vôo foi de 29 minutos a uma velocidade média de vôo horizontal de 58 km / h (16 m / s). Durante esse tempo, o drone foi capaz de cobrir 27 km. Você também pode notar que o vôo foi realizado em condições de vento forte, que era constantemente alertado pelo sistema de drones.
.






