
- 1 Introduktion
- 2 Udvikleren om maskinen
- 3 Funktioner
- 4 Pakke indhold
- 5 Specifikation
- 5.1 Drone
- 5.2 Kommunikation
- 5.3 Navigationssystem
- 5.4 Skycontroller 4
- 5.5 Aircraft Intelligent Battery
- ) 5.6 App
- 5.7 Kamera
- 5.8 Autonome flyveformer
- 5.9 Cybersecurity
- 5.10 Papegøje SDK
- 6 Udseende
- 7 Kommunikation
- 7,1 4G
- 7,2 Maks. rækkevidde med 4G-forbindelse
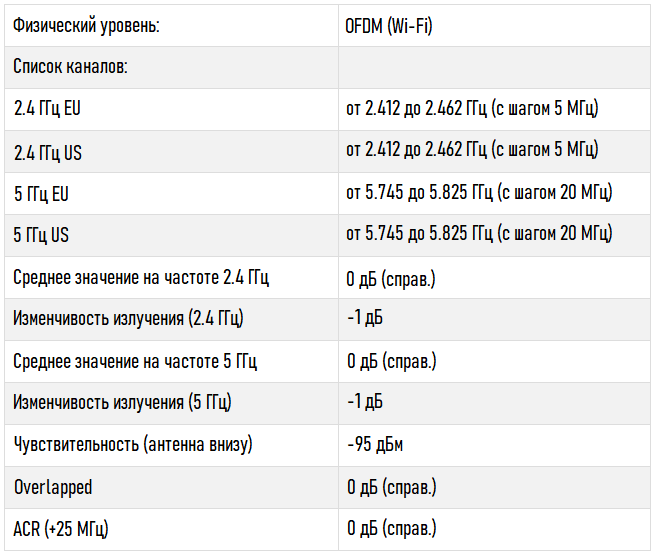
- 7.3 Wi-Fi
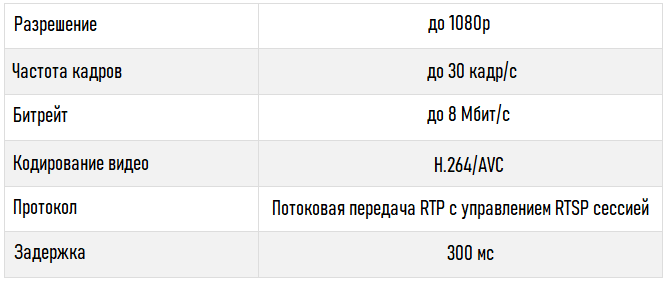
- 7.4 Live video
- 8 Kamera
- 8.1 48MP matrix
- 8.2 Objektiv
- 8.3 Videotilstande
- 8.4 Videokodning
- 8.5 HDR
- 8.6 Fototilstande
- 9 Hybridstabilisering
- 9.1 Hovedkamera gimbal
- 10 Fotogrammetri
- 10.1 Inspektion og kartografi
- 10.2 AI- og 4G -muligheder
- 10.3 Autonom flyvning
- 11 Fotogrammetri eller lidar
- 11.1 Fotogrammetri -fordele
- 11.2 LIDAR -ulemper
- 12 SDK
- 12.1 Air SDK
- 12.2 Jord SDK
- 12.3 OpenFlight
- 12.4 Sphinx
- 12.5 Olympe
- 12.6 PdrAW
- 12.7 Modeller C. A. D.
- 12.8 MAVLink og GUTMA -kompatibilitet
- 13 Største partnerøkosystem for papegøje -droner
- 13.1 Papegøje for ethvert forretningsbehov
- 14 Cybersecurity
- 14.1 Datasikkerhed
- 14.2 FIPS140 -kompatibel -2 og certificeret af CC EAL5 Secure Element
- 14.3 4G Secure Connection and Strong Authentication
- 14.4 Sikker initialisering og opgradering
- 14.5 Indstilling af brugernøgler på det sikre element
- 14.6 Digitalt signerede fotos
- 14.7 Gennemsigtighed og kontinuerlig sikkerhedskontrol med bug bounty
- 15 Datastyring
- 15.1 Indsamlede data
- 15.2 Endelig brug af indsamlede data [1 26]
- 15.3 Forbedring af kunstig intelligens (AI)
- 16 Flyveegenskaber
- 16.1 Aerodynamiske egenskaber
- 16.2 Aktuatorer og aerodynamik
- 16.3 Sensorer
- 16.4 Sensorkarakteristika
- 16.5 Autopilot
- 17 Autonom flyvning
- 17.1 Nøglefunktioner
- 17.2 Opfattelsessystemstrategi
- 17.3 Sensorer
- 17.4 Dobbelt suspension
- 17.5 Genopbygning af miljøet
- 18 Flight Missions
- 18.1 Nøglefunktioner
- 19 Pris og tilgængelighed
- 20 Download dokumentation
- 21 videoer
Introduktion [16 4]
Parrot Anafi Ai er en helt ny unik løsning fra en velkendt fransk udviklerkommerciel brug
Anafi Ais telefonkort er det indbyggede 4G-modul, takket være hvilket dronen var i stand til at bruge fjerde generation af mobilkommunikation som hoveddatatransmissionskanal mellem dronen og kontroludstyret, hvilket faktisk fjerner alle begrænsninger på flyveområdet og forudbestemmer driften af UAV uden for sigtelinjen. Når vi ser fremad, bemærker vi, at maskinens erklærede potentiale viste sig at være utrolig kraftfuldt og mere end nogensinde svarer til dets futuristiske udseende, som var inspireret af naturen til at skabe franske ingeniører.
Udvikleren om bilen
Martin Liné, marketingdirektør hos Parrottilbød papegøje -droner

Funktioner
Nøglefunktioner i Papegøje Anafi Ai:
- Vægt 898 gram
- Tid til at flyve 60 sekunder
- Unikt bærbart foldbart design
- Indbygget 4G kommunikationsmodul til fuld drone / kontroludstyrsinteraktion uden begrænsninger under alle miljøforhold
- Kompatibel med LTE på verdensplan
- Udstyret med omnidirektionelt signaloverførselssystem (4 retningsantenner med reflektor (med forstærkning: 2,5 dBi / s antenner). Dronen bestemmer det bedste par antenner afhængigt af dets orientering og position i forhold til pilotens position)
- Udstyret med et unikt omnidirektionelt billeddannelsessystem i den omgivende verden bygget på et par stereoskopiske kameraer monteret på en specialiseret gimbal med et 330 -graders pan -område (fra -120 ° til 210 °), arbejder sammen med et intelligent optimeringssystem. flyveveje
- Tilpasset til indendørs flyvning
- Live videostreaming i 1080p med lav latens (300 m / s) uden rækkeviddebegrænsninger overalt i verden, med videobitrate 12 Mbps
- Mulighed for at overføre filer til cloud storage direkte under flyvning
- Indbygget Wi-Fi kommunikationsmodul (Wi-Fi 802.11a / b / g / n) til fuldgyldig drone / udstyr interaktionskontrol (som en alternativ tilslutningsmulighed)
- Slave. Wi-Fi frekvensområde: 2,4 GHz / 5,8 GHz
- Maks. rækkevidde af FPV-flyvning over Wi-Fi: 9 km
- Unik automatisk betjeningsmetode for 4G / Wi-Fi-moduler, som gør det muligt, baseret på netværksbelastning, problemfrit at skifte fra en kommunikationsteknologi til en anden uden tab af data
- Beskyttelsesklasse drone IPX3
- Maks. flyvetid 32 min
- Maks. vandret flyvehastighed 61 km / t
- Maks. vindmodstand: 13 m / s
- Maks.loft over havet 5000 m
- 48MP 4K kamera bygget på 1/2-tommer CMOS matrix med en pixelstørrelse på 0,8 mikron; med indbygget Bayer farvefilterarray
- Optisk LD-ASPH-linse
- Hybrid 6-akset billedstabiliseringssystem (3-akset mekanisk 3-akset digital EIS)
- Kan kontrolleres driftsområde Gimbal -90 ° til 90 °
- 6x tabsfri digital zoom (2x 4K / 4x FHD)
- Maks. videobithastighed 200 Mbps
- Videooptagelsesformater HDR8 / HDR10
- Maks. dynamisk område 14EV
- P-log farveprofil til efterbehandling
- 5 × automatiske flyve- og optagelsestilstande (fotogrammetri / flyveplan / kameramand / Smart RTH / køretøj)
- Indbyggede slots til MicroSD og SIM-kort
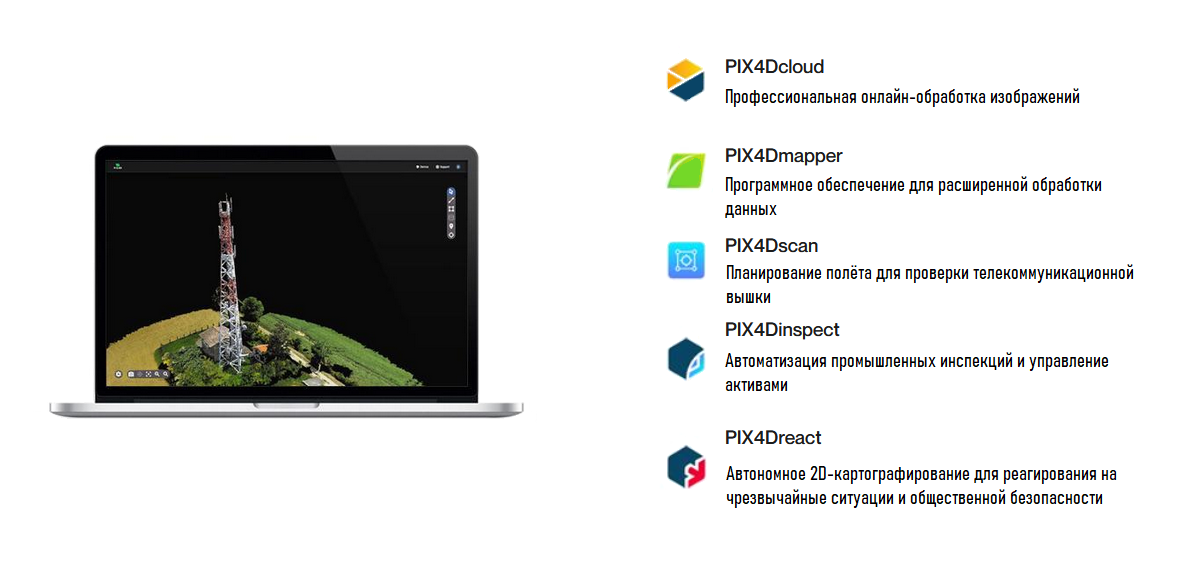
- Kompatibel med PIX4D Suite
- Fotogrammetriske flyvemåder er tilgængelige i mob. FreeFlight 7-app og OpenFlight-software
- Oprettelse af flyveplan med ét klik
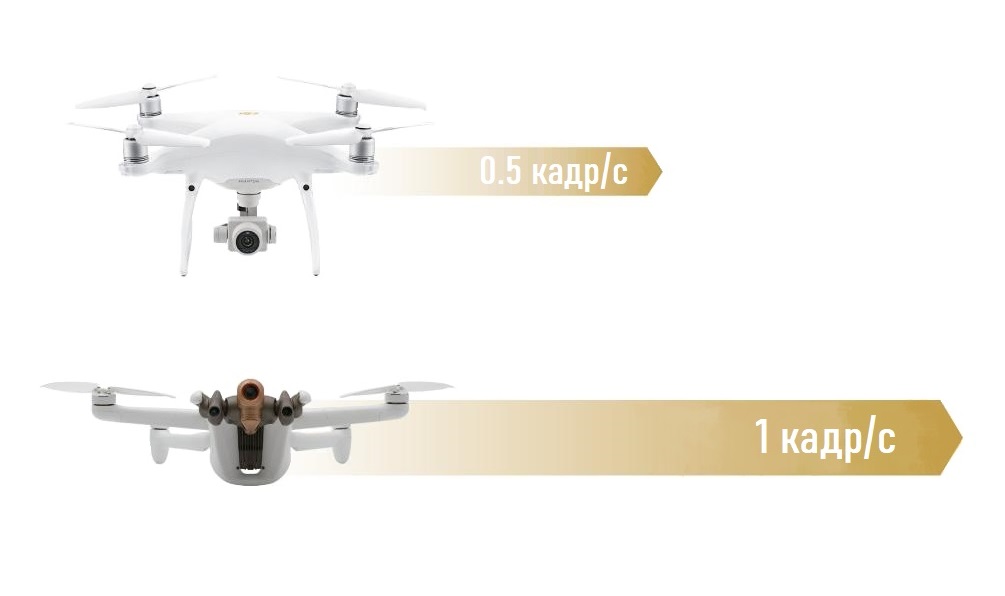
- 48MP 1 fps fotogrammetri: dobbelt så hurtigt som konkurrenter
- Optagelsesnøjagtighed: 0,46 cm / pix. GSD på 30m
- Papegøje SDK -understøttelse (med mulighed for at integrere din kode i dronen ved hjælp af Air SDK, oprette mobilapplikationer ved hjælp af Ground SDK, konfigurere en open source -jordstation ved hjælp af OpenFlight, interagere med den moderne Sphinx dronesimuleringsværktøj samt Python -scripting med Olympe og video- og metadata -behandling med PdrAW)
- Kompatibel med tredjeparts software: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- ANAFI Ai Forordninger EU-databeskyttelsesforordning (GDPR)
- Overlegen databeskyttelse med indlejret NIST FIPS140-2 niveau 3 WISeKey Secure Element med Common Criteria EAL5-certificering
- Video og kontroller er beskyttet med SRTP / DTLS i henhold til til webRTC
- Nyt Parrot Skyco bærbart kontroludstyr ntroller 4
- Ny mobilapplikation Parrot FreeFlight 7

Pakke
Udvikleren tilbyder dronen i en enkelt konfiguration, som vil omfatte:
- Drone ANAFI Ai
- Stiv transportkasse
- Kontroludstyr Parrot Skycontroller 4
- 1 × Smart batteri
- USB-PD oplader
- Reserve propelsæt (2CW / 2CCW)
- Ledsagerkabel (USB-C til lyn)
- 2 × ledsagekabler (USB -C til USB -C)
- Kalibreringskort

Specifikation
Fly

Kommunikation
Navigationssystem
Skycontroller 4

Intelligent batteri til fly]
App

Kamera

Autonome flyveformer
Cybersecurity
Papegøje SDK
Næste, du kan gøre dig bekendt med de centrale oplysninger om Parrot Anafi Ai, som giver dig mulighed for at lære mere om maskinens erklærede potentiale, samt hvilke forbedringer der er blevet implementeret i sammenligning med den kommercielle version af dronen Parrot Anfi Thermal og andre droner fra førende mærker.
Udseende





Kommunikation
4G
ANAFI Ai inkluderer 4G radiomodul (ud over Wi-Fi-radiomodulet), som giver dig mulighed for at udsende en videostream i 1080p-kvalitet med en maksimal bithastighed på 12 Mbps, med en meget lav latenstid (300 ms), uden begrænsning i rækkevidde og hvor som helst i verden.
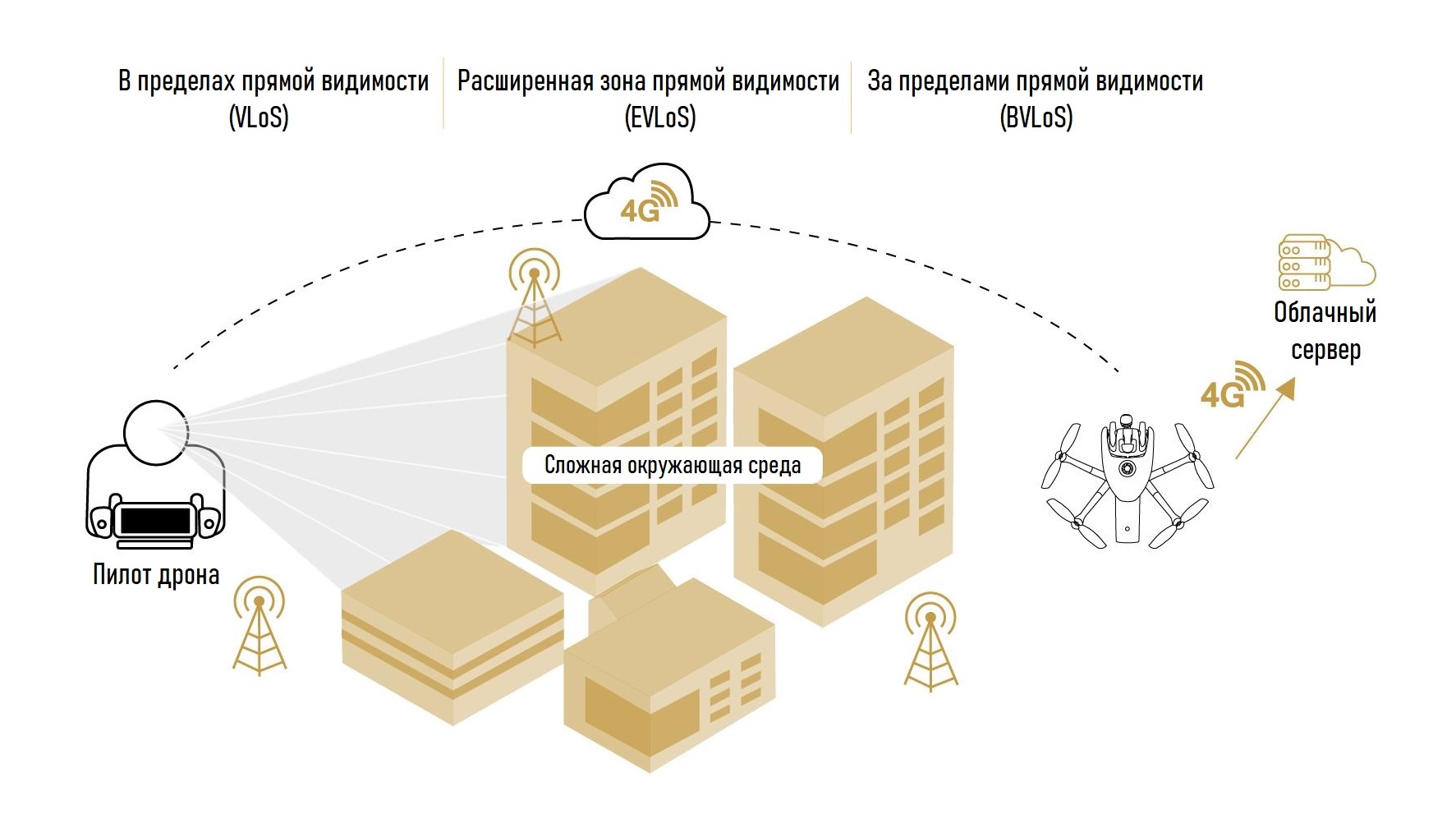
Kompatibilitet
ANAFI Ai 4G -modulet understøtter over 28 frekvensbånd, der dækker mere end 98% af de frekvenser, der distribueres over hele verden.
Automatisk netværkskontakt
Kvalitet og båndbredde på 4G- og Wi-Fi-netværk måles hver 100 ms for at tilpasse streaming til netværksforhold. Kombineret med routingsalgoritmer opretholdes forbindelsen mellem dronen og dens controller, selv når Wi-Fi er alvorligt afbrudt. Når den effektive båndbredde (brugbar båndbredde) af Wi-Fi er under 1,5 Mbps, skifter systemet således automatisk til 4G.
For at begrænse forbruget af mobildata, når piloten er inden for rækkevidde af dronens Wi-Fi-netværk, udføres overgangen fra 4G til Wi-Fi også automatisk uden at videostrømmen afbrydes.
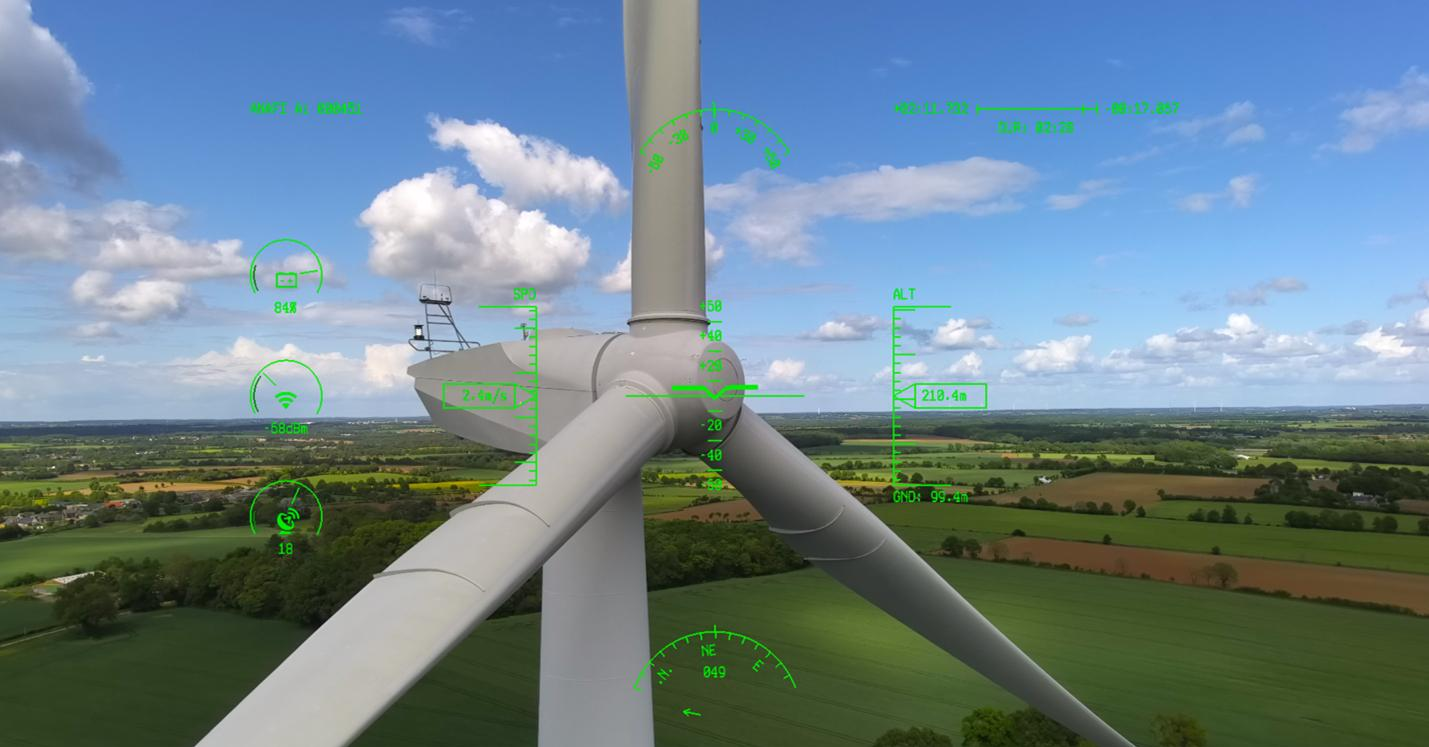
Maks. rækkevidde med 4G -forbindelse
Videoen fra udvikleren viser maks. flyveområde af Anafi Ai med 4G -forbindelse i en retning på en batteriopladning. Den samlede flyvetid var 29 minutter ved en gennemsnitlig vandret flyvehastighed på 58 km / t (16 m / s). I løbet af denne tid kunne dronen tilbagelægge 27 km. Du kan også bemærke, at flyvningen blev udført under stærke vindforhold, som konstant blev advaret af dronesystemet.
Implementerede algoritmer til optimering af videostrømme
4G overbelastningskontrol
Algoritme til overbelastningsstyring tillader:
- Mål pakketab over hele netværkscyklussen.
- Mål forsinkelse (rundturstid).
- Juster båndbredden i henhold til disse to parametre.
Algoritmens ultimative mål er at maksimere den tilgængelige båndbredde og samtidig opretholde den lavest mulige latenstid. Denne algoritme er implementeret på hver af de grænseflader, der er tilgængelige i dronen, hver med sine egne parametre, optimeret i henhold til netværket. Baseret på oplysningerne fra denne algoritme, tager linkmanageren beslutninger om routing og aktive grænseflader.
Styring af dronen via 4G-forbindelse
ANAFI Ai opretter forbindelse til fjernbetjeningen via 4G på mindre end 30 sekunder, hvis dronen er uden for Wi-Fi's rækkevidde og på mindre end 15 sekunder hvis dronen er inden for Wi-Fi-området. Og også 4G -forbindelse giver:
- Registrering og initiering af en forbindelse baseret på VOIP SIP -protokollen.
- Brug en relæserver til at etablere forbindelser over sikre netværk.
Videostreamydelse
- Latency: 300 ms.
- Sikkerhed: video og kontrolelementer er beskyttet med SRTP / DTLS i henhold til webRTC.
- Antenner: 28 LTE -bånd fra 700 MHz til 2,6 GHz.

Wi-Fi
Omni-directional transmission system
- ANAFI Ai har 4 retningsreflektorantenner (med antenneforstærkning: 2,5 dBi / s). Dronen bestemmer det bedste antennepar baseret på dets orientering og position i forhold til pilotens position.
- Med en rekombineret forstærkning på 3,5 / - 1,5 dBi i dronens vandrette plan er ANAFI RF -forstærkningen Ai meget ensartet.
- Nedstrøms antennestråling er blevet forbedret med 4 dB i forhold til ANAFI.
Eksternt design af radioen med høj effekt
Radioens forside maksimerer effekten i bunden af antennen med meget god linearitet og følsomhed (-94 dBm ved 6,5 Mbps) for at opnå den maksimale FCC-begrænsende effekt.

Wi-Fi-pålidelighed
802.11 parametre
lav båndbredde, lav latenstid, variabilitet i modtagelsesniveauet på grund af hastigheden på drone, lang rækkevidde, tilstedeværelse af interferens. Disse parametre inkluderer aggregering, genforsøg, MiMo -teknologi (STBC), datarate for kontrolramme og afbrydelsesforhold.
Intelligent interferensforebyggelse
ANAFI Ai har en algoritme til kanalsletning (2,4 GHz og 5 GHz dual band) i tilfælde af interferens.
Tilpasning og flowovervågning
ANAFI Ai overvåger løbende status for dets 4 Hz -link og kan registrere interferens. Dette giver dig mulighed for dynamisk at optimere båndbredden og størrelsen på de transmitterede pakker. Det advarer også piloten, hvis han befinder sig i et særligt blokeret miljø eller er ved at miste signal.
Reduktion af båndbredde
Ved grænsen for sit område, og hvis forholdene tillader det, kan ANAFI Ai skifte til 10 MHz båndbredde for at forbedre sin følsomhed med 3 dB og øge området med 40%.

Radioindikatorer
Videoudsendelse
Indikatorer for videolink
Implementerede algoritmer til optimering af videostrømme
Parrot Gen4 Streaming (4. generation)
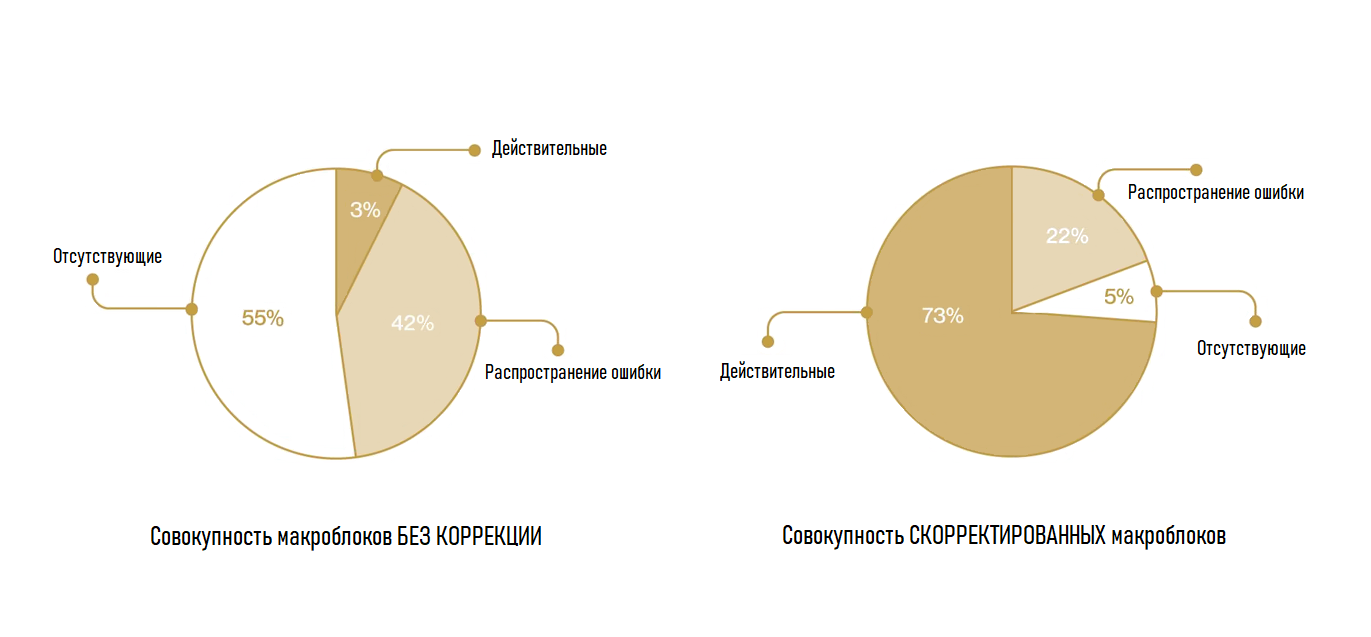
Denne algoritme reducerer den visuelle effekt af netværkstab og giver interoperabilitet alle dekodere, samtidig med at de giver en syntaktisk komplet strøm: de manglende dele af billedet rekonstrueres som manglende dele, identiske med dem i referencebilledet.
Fejl er således indeholdt i de områder, der er tilbøjelige til at tabe, og gælder ikke for hele billedet.
Graferne herunder viser succesraten for makroblokdekodning med 5% netværkstab - med og uden ANAFI Ai avancerede streamingfunktioner. Algoritmen sikrer korrekt afkodning af 75% af makroblokke. De giver brugeren mulighed for at fortsætte sin mission uden at fryse skærmen eller miste streaming.
Overbelastningskontrol
Algoritmen evaluerer også Wi-Fi- og radiomiljøet for at foregribe og undgå pakketab og netværksbelastning, hvilket hjælper med at reducere ventetid. Algoritmen er baseret på et estimat af kanalkapaciteten, beregnet ud fra datahastigheden og fejlfrekvensen ved det fysiske lag; så påvirker det netværkskodning og indkapslingsparametre.
Metadata
Metadata transmitteres med videostrømmen. Især indeholder de drone -telemetrielementer (position, højde, hastighed, batteriniveau osv.) Og videomålinger (kameravinkel, eksponeringsværdi, synsfelt osv.).
Synkronisering af billeder og åbne metadata udfører funktionerne med præcis positionering på kortet, sporing af flyveinstrumenter i HUD eller aktivering af augmented reality -elementer.
Metadata er inkluderet ved hjælp af standardmetoder (RTP -headerudvidelse); dataformatet defineret af Parrot er open source: det er tilgængeligt i ANAFI Ai SDK.
Kamera

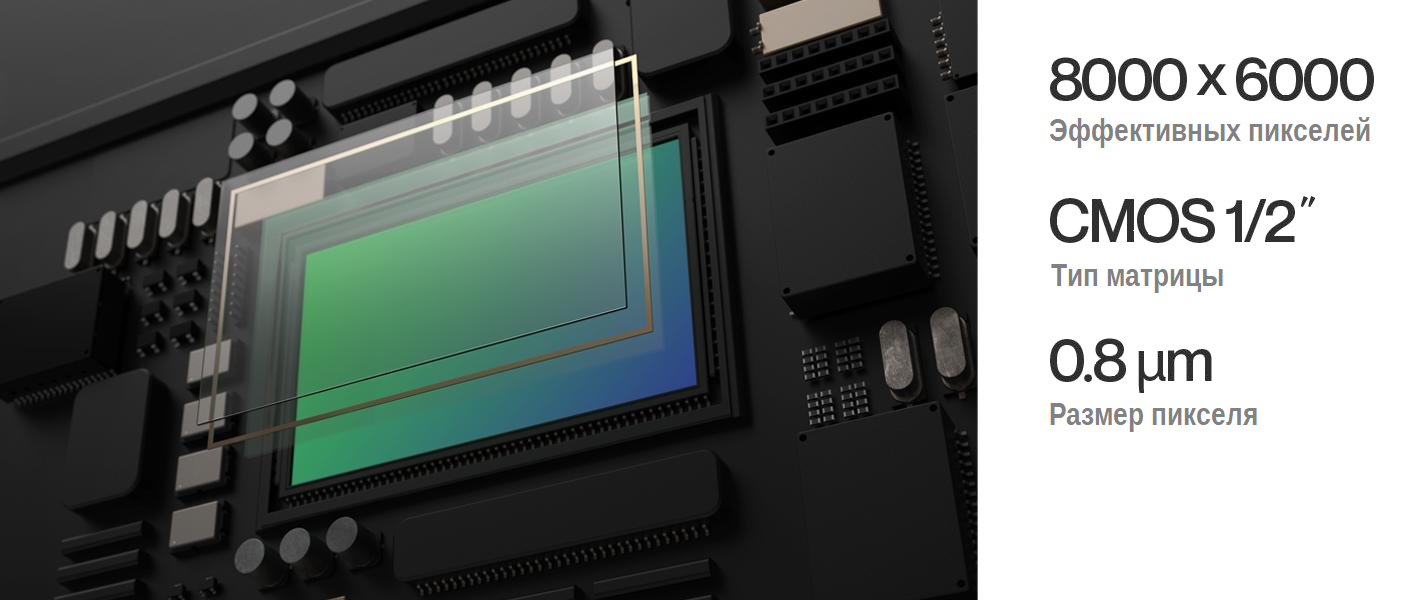
48MP sensor
ANAFI Ai -matrix indeholder et stort antal megapixel til detaljeret luftfotografering.
Det anvender Quad Bayer farvefilter array -teknologi, hvor grupper på 4 tilstødende pixels har samme farve. Således kan HDR-optagelse i realtid opnås i både foto- og videotilstande ved at tilføje signaler fra fire tilstødende pixels.
Dens dynamiske område er 4 gange større end standard Bayer -matricer. Selv komplekse scener kan optages med minimal fremhævelse eller tab af skyggedetaljer.
Objektiv
ANAFI Ai -objektivet er specielt udviklet til Papegøje. Den kombinerer 6 asfæriske elementer og er optimeret til at reducere optisk flare. Dette objektiv giver 68 ° HFoV i standardvideotilstand og 64,6 ° HFoV i standardfototilstand.

Videotilstande
ANAFI Ai optager glat 4K-video med 60 billeder i sekundet, inklusive P-Log, og også HDR10 4K video med op til 30 bps. Tabellen nedenfor viser alle ANAFI Ai -videotilstande.

Videokodning
Brugere kan vælge mellem H.264 (AVC) og H.265 (HEVC).
Alle opløsninger bruger følgende pixelformater:
- YUV420p (8-bpc BT.709 farverum) til standardtilstand og HDR8.
- YUVJ420p (8 bit / komponent, fuld rækkevidde - BT.709 farverum) til P -log -stil.
- YUV420p10 (10bpc BT.2020 farverum) til HDR10 -optagelse, kun H.265.
HDR
Ved optagelse af video i HDR8 og HDR10 dækker ANAFI Ai et dynamisk område på 14 EV. HDR10 -formatet tilbyder en maksimal lysstyrke på 1000 nits og en farvedybde på 10 bits. Det giver en milliard farveskala mod 16 millioner for standard dynamisk område. Sammenlignet med HDR8 producerer HDR10 billeder mere end dobbelt så lyse med en tilsvarende stigning i kontrast. HDR8 kan vises på enhver standardskærm, mens HDR10 er til fjernsyn og HDR10 -skærme.
Fototilstande
Beskrivelse af tilstande
Mode Control -sektionen indeholder indstillinger, der påvirker antallet af billeder, der tages hver gang lukkeren udløses.
Single capture mode
Standard single capture mode. Efter hver udløser behandles det optagede billede øjeblikkeligt af systemet.
Bracketing -tilstand
Brugere kan optage en serie på 3, 5 eller 7 billeder med forskellig eksponering for hvert billede. Følgende forudindstillinger er tilgængelige:
- [-1 EV, 0, 1 EV] (standardindstillinger)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

Burst -tilstand
Burst -tilstand giver brugeren mulighed for at tage et burst på 10 billeder på 1 sekund.
Panoramatilstand
Panorama -tilstand indeholder fire forskellige panoramabilleder:
- Sfærisk (360 °) er en panoramatilstand, der indeholder tre muligheder for skyde et sfærisk panorama: Sphere / Little Planet / Tunnel.
- Vandret (180 °)
- Lodret (109 °)
- Superdækkende - ny super bred syningstilstand med 9 billeder (HFOV 110 °, lige panorama)
For detaljer om specifikationer for panoramatilstand, se nedenstående tabel:

Timelapse mode
Denne tilstand giver dig mulighed for at tage billeder med følgende faste tidsintervaller:
- 48MP: 1, 2, 4, 10, 30 eller 60 sekunder.
- 12MP: 0,5, 1, 2, 4, 10, 30 eller 60 sek.
GPS Lapse -tilstand
Denne fototilstand er udviklet til inspektion og fotogrammetri. Det giver dig mulighed for at tage billeder med følgende faste afstandsintervaller: 5, 10, 20, 50, 100 eller 200 meter.
Tabellen herunder viser tilstande og opløsninger til stillbilleder, herunder sensoraflæsningstilstand:
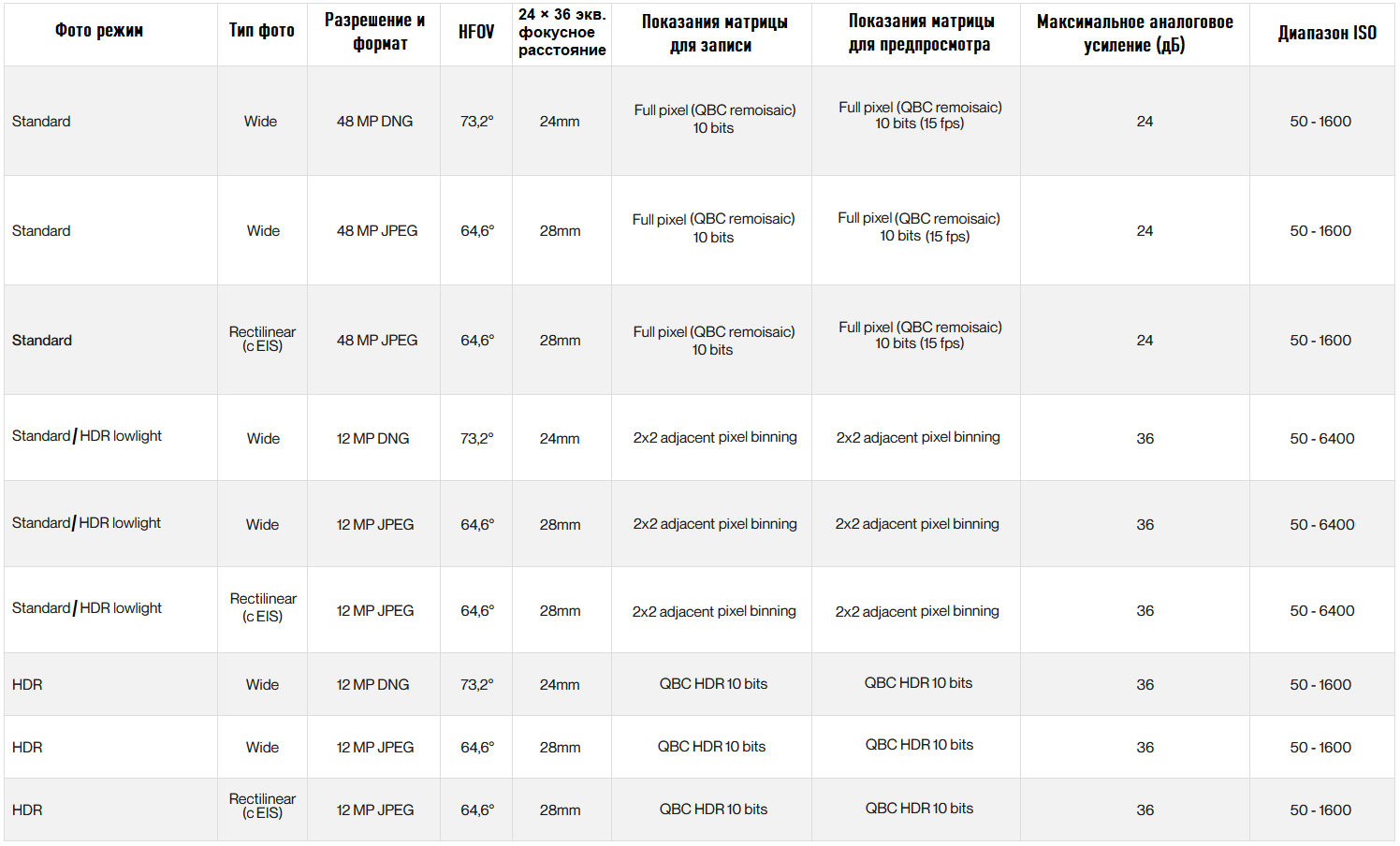
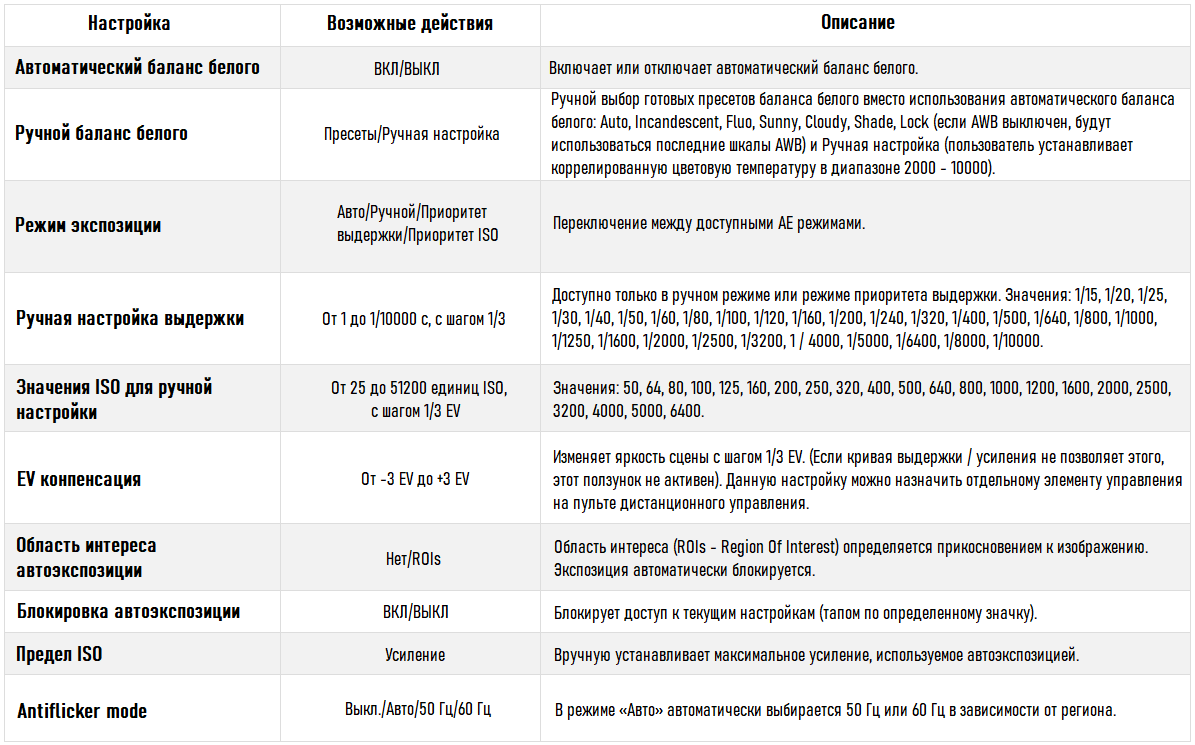
Indstillinger
I følgende tabellen viser de tilgængelige indstillinger for hver tilstand.
6x zoom
Zoom er tilgængelig i alle foto- og videotilstande. Kombineret med en 48 megapixelsensor producerer præcise skarphedsalgoritmer billeder i høj opløsning selv ved brug af 6x digital zoom. ANAFI Ai -brugere kan nu se 1 cm detaljer fra 75 m væk. Det høje pixeltal tillader også, at 4K -video beskæres til 1080p uden tab af kvalitet.

Hybridstabilisering
ANAFI Ai har den mest nøjagtige stabilisering på mikro -UAV -markedet.
Den kombinerer kombineret stabilisering:
- 3-akset mekanisk (3-akset mek. Gimbal)
- Elektronisk 3-akset (EIS)
Mekanisk stabilisering stabiliserer kameraets pegeakse uanset dronens flyveposition. Elektronisk billedstabilisering korrigerer mikro-vibrationseffekter for frekvenser over 100 Hz, som det mekaniske drev ikke kan håndtere.
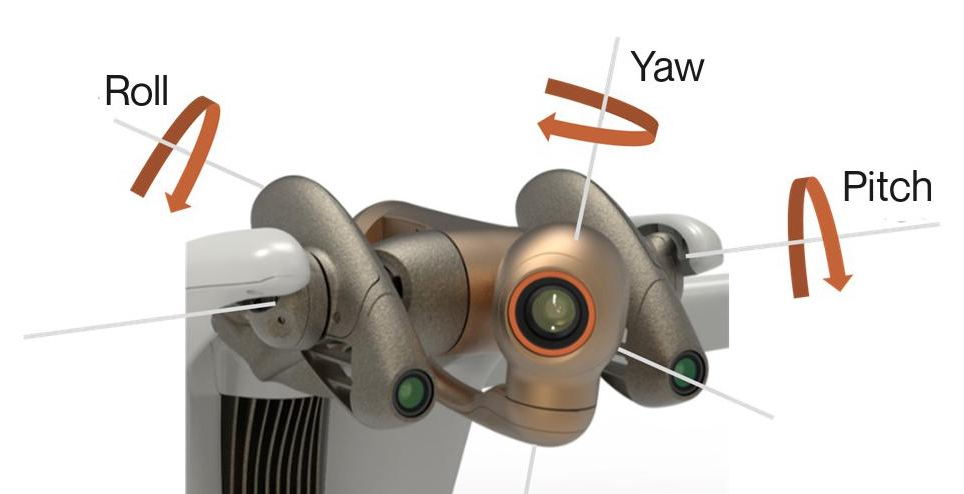
Hovedkamera gimbal
Mekanisk stabilisering giver dig mulighed for at stabilisere og orientere den horisontale akse for kameravisningen i alle 3 akser.
 3 rotationsakser mech. suspension af hovedkameraet ANAFI Ai.
3 rotationsakser mech. suspension af hovedkameraet ANAFI Ai.
Nøglefunktioner
- 3 -akset mekanisk gimbal til hovedkamera
- Vertikal forskydning 292 °, synsfelt -116 ° til 176 °
Gimbal Performance
- EIS-algoritmen korrigerer virkningerne af wobble og forvrængning af vidvinkelobjektivet og udfører også 3-akset digital billedstabilisering (Roll, Pitch og Yaw).
- Metoden består i at anvende en geometrisk transformation af billedet. Geometrisk transformation er forbundet med tidsstempel og præcis position takket være IMU.
- Geometrisk transformation påføres hvert billede i henhold til optisk forvrængning, vibrationer og bevægelser af den målte kameraenhed.
Pivot -område 292 °
Kameraet har et vandret pivot -område på -116 ° / 176 ° omkring pitchaksen, hvilket giver observation over og under dronen, som er en unik mulighed på markedet mikro-UAV.
![]()
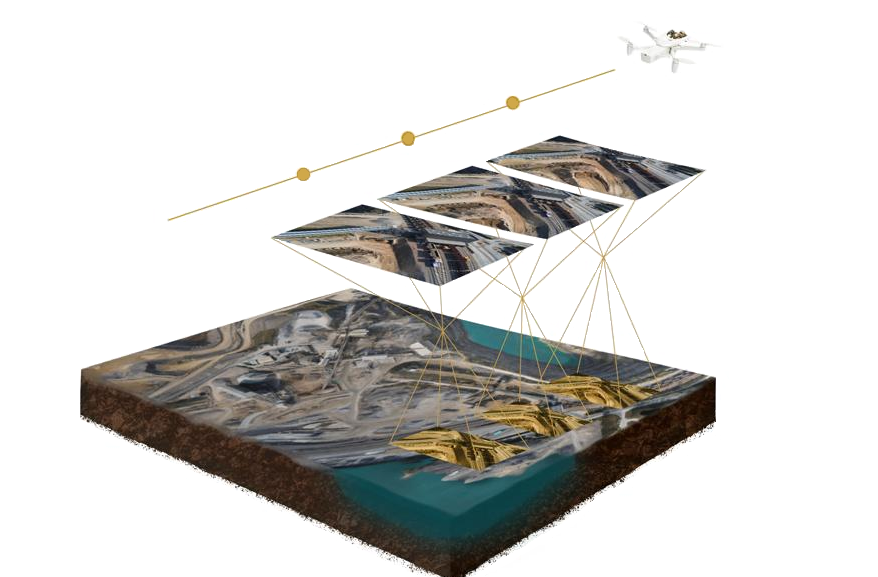
Fotogrammetri
Luftfotografering med ubemandede luftfartøjer ændrer den måde, specialister foretager inspektion og opmåling på. Fotogrammetri metoder bruges til at behandle billeder indsamlet af UAV'er til at oprette 2D- og 3D -modeller, som senere giver kunderne mulighed for at planlægge vedligeholdelse af de undersøgte objekter rettidigt.
4G giver enestående pålidelighed af dronedatalinket. Brugere kan betjene UAV'er over store områder nær metalstrukturer, bygninger uden frygt for tab af kommunikation.
Inspektion og kortlægning
Ved at kombinere AI'en for ANAFI Ai -dronen med PIX4Dinspect -onlineplatformen vil brugerne kunne udføre inspektioner hurtigere og mere effektivt end nogensinde før. eller. Maskinlæringsalgoritmer genkender antenner på celletårne, bestemmer deres størrelse, højde, hældning, azimut og vertikalitet.
Klik på billederne herunder for at se demo -3D -modeller genereret af ANAFI Ai.
Eksempel # 1

Eksempel # 2
Matrix i bedste klasse
Kameraet på ANAFI Ai-dronen er udstyret med en 48MP 1/2-tommer CMOS-sensor bygget med Quad Bayer farvefilterteknologi, som er mere egnet end nogensinde til inspektion og fotogrammetri. Den anvendte matrix giver dig mulighed for at få detaljerede billeder med et bredt dynamisk område.
Billeder i høj opløsning
ANAFI Ai er i stand til at generere 48 megapixel stillbilleder og dermed fange alle detaljer i høj opløsning og skabe en sky med høj densitet.
Signifikant skarphed
Inspektionsmissioner kræver evnen til at identificere små detaljer som f.eks. Serienumre, stik, rustpletter og begyndende revner.
Bredt dynamisk område
10 stop af dynamisk område i standardtilstand, 14 stop i HDR -tilstand. Optimal billedgradering er afgørende for at skabe konsistente skypunkter og 2D- eller 3D -rekonstruktioner i høj kvalitet.
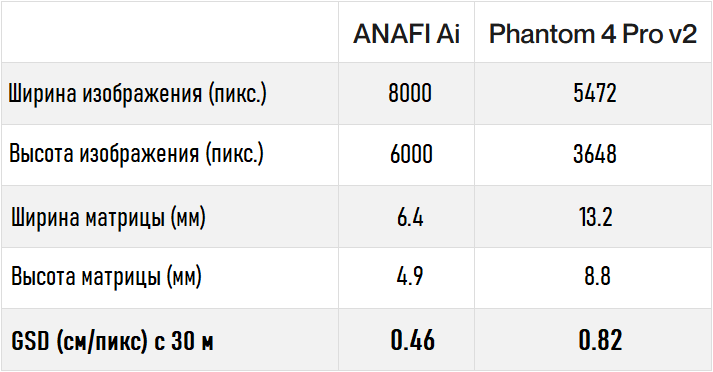
55% flere detaljer end 1-tommer sensorer
ANAFI Ais 48MP 1/2-tommer Quad Bayer-sensor er skarpere end de 20MP 1-tommer sensorer, der bruges i en række moderne professionelle droner. De følgende billeder fra ANAFI Ai og DJI Phantom 4 Pro V2.0 taginspektion i samme højde viser klart dette faktum.

Ideel til inspektioner
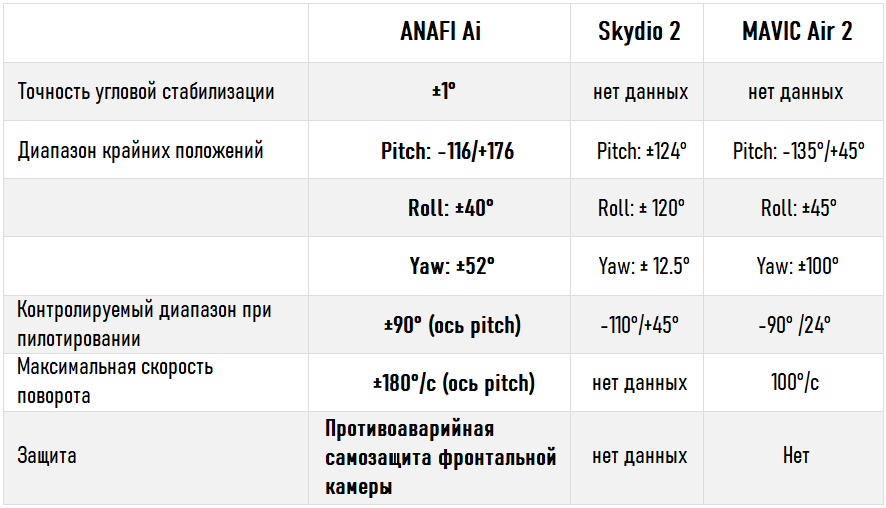
ANAFI Ai gimbal indeholder et 6-akset hybrid (mekanisk elektronisk) stabiliseringssystem, der kompenserer for flyvesvingninger og sikrer billedets skarphed. ANAFI Ai -kameraet har en justerbar rækkevidde på -90 ° til 90 °, hvilket gør det til et ideelt luftbåren instrument til visning af undersiden af en brobase.
Kontrollerbar hældning ± 90 °
Nøjagtighed
ANAFI Ai giver brugerne mulighed for at opnå en GSD på 0,46 cm / px fra en højde på 30 m, hvilket betyder relativ nøjagtighed planimetri op til 0,92 cm.
Til sammenligning giver DJI Phantom 4 Pro V2i samme højdeen GSD på kun 0,82 cm / px. Med andre ord kan ANAFI Ai kortlægge det samme mål og flyve mere end 1,5 gange højere end Phantom med et tilsvarende detaljeringsniveau.
AI- og 4G -funktioner
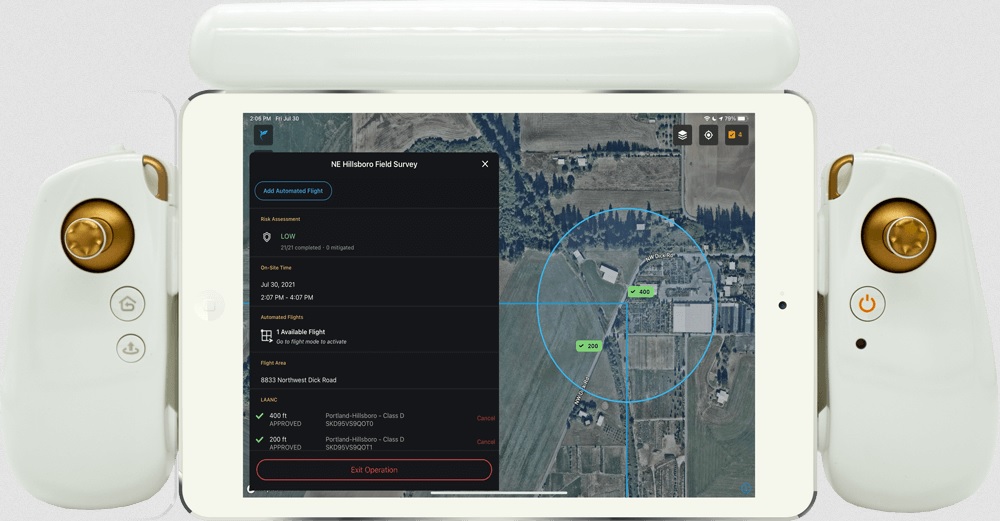
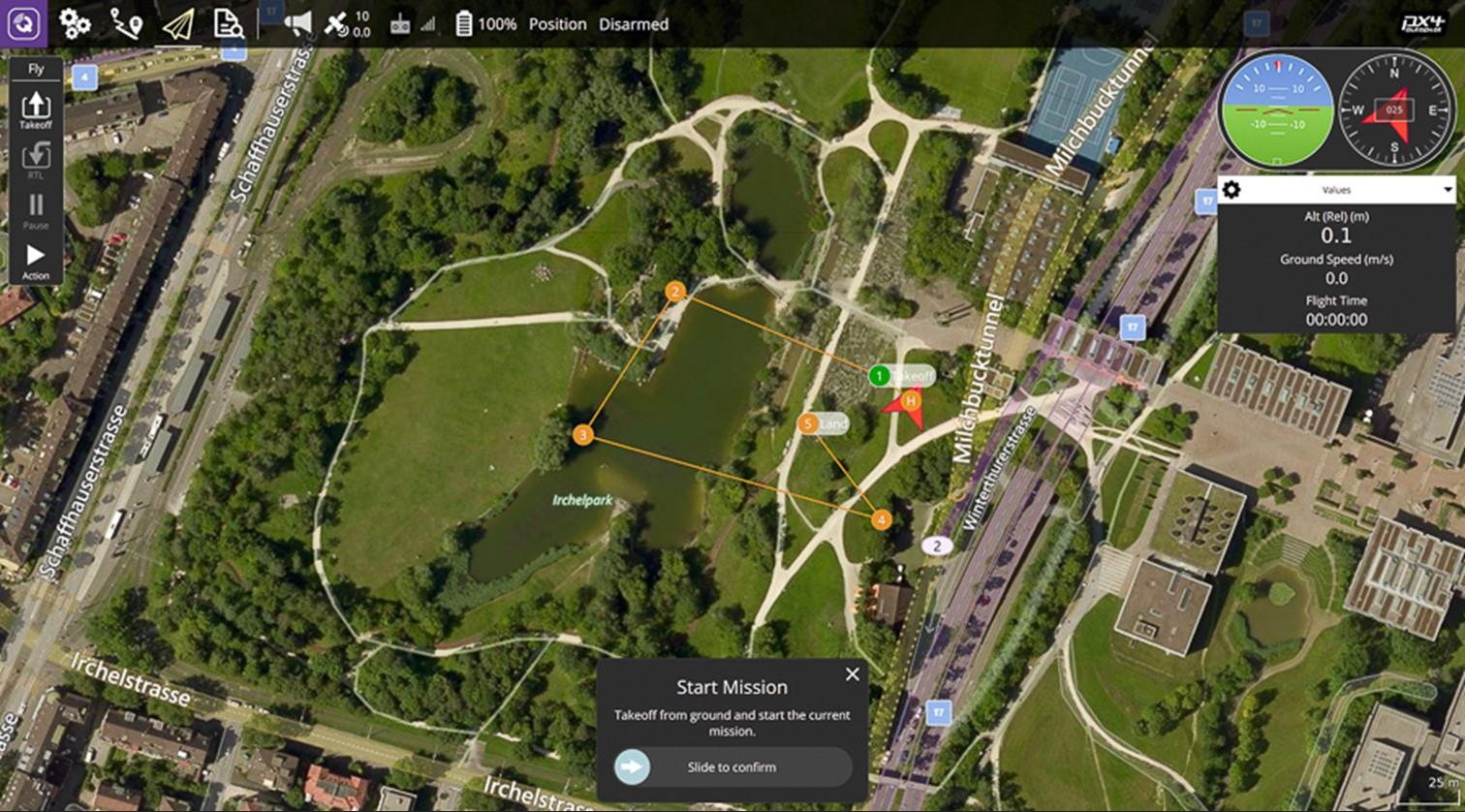
Én app. Enhver flyveplan
Potentialet i FreeFlight 7 -mobilapplikationen gør det muligt for brugeren at starte alle undersøgelses-, inspektions- og fotogrammetri -missioner.

Tilgængelige fotogrammetriske flyvemåder
Følgende fotogrammetriske flyvemåder er nu tilgængelige i FreeFlight 7 mobilapplikationen:
- Grid
- Dobbeltgitter
- Сircular
Opret en flyveplan med et tryk
Et tryk på FreeFlight 3D interaktive kort er alt, hvad du har brug for til hurtig scanningsbygning. Kunstig intelligens bestemmer automatisk de optimale flyveparametre og bane. 48 MP -billeder med nøjagtig georeferering af ANAFI Ai -sensorer (IMU, GNSS og flyvetid) muliggør nøjagtig 3D -rekonstruktion.
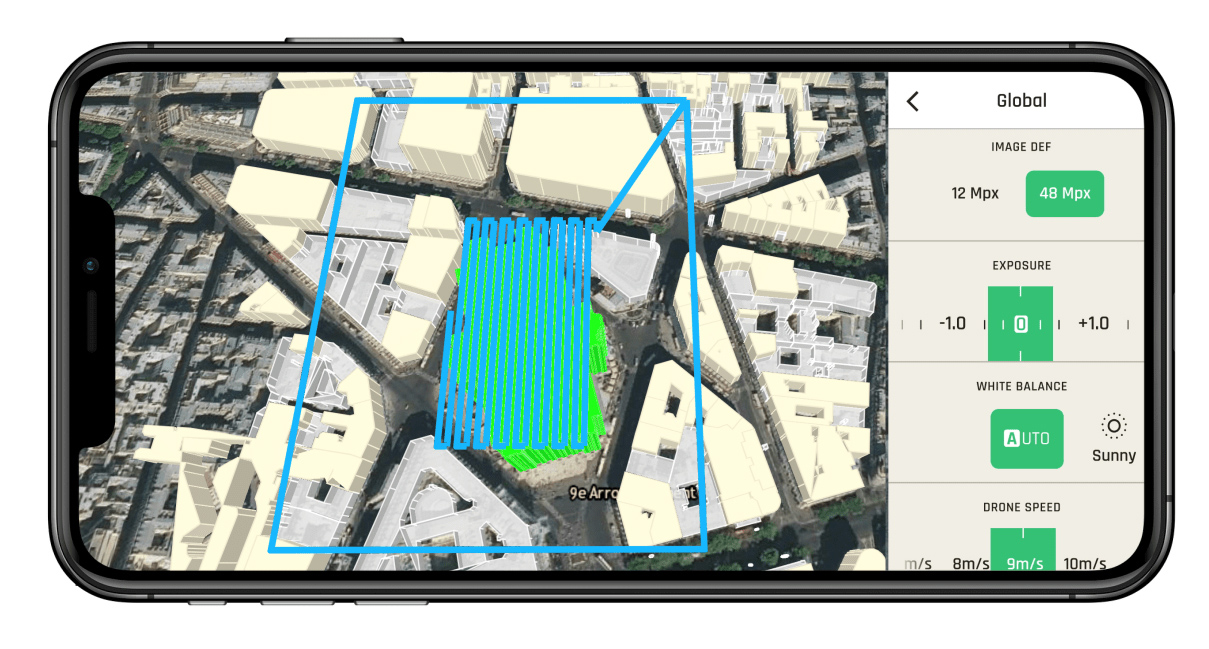 Automatisk flyveplan oprettet med ét tryk i 3D matriklen.
Automatisk flyveplan oprettet med ét tryk i 3D matriklen.
- FreeFlight 7's kartografiske baggrund er fra ArcGIS -software. 3D -bygningsrepræsentationen er baseret på OpenStreetMap -data, der dækker byer rundt om i verden.
- Visualiseringssystemer sikrer sikkerheden ved en given flyveplan: brugerne skal ikke bekymre sig om forhindringer. ANAFI Ai undgår dem selvstændigt.
Autonom flyvning
ANAFI Ai -rundstrømsensorsystemet, baseret på stereoskopisk syn, orienterer sig automatisk i kørselsretningen.

Dronen registrerer forhindringer, der er 30 meter væk. AI -teknologi bygger og opdaterer konstant udfyldningsgitteret, mens der udføres en given flyveplan. Det repræsenterer dronemiljøet i voxels.
Algoritmerne bestemmer den bedste bane for at undgå at kollidere med forhindringer, mens dronen forbliver fokuseret på sit mål: den tildelte flyvemission.

4G -forbindelse
ANAFI Ai er den første kommercielle mikrodron udstyret med et 4G -modul. Det dækker over 98% af de frekvenser, der bruges på verdensplan.

Undersøgelse af højspændingsledninger. Optaget med ANAFI Ai, redigeret med Pix4Dmatic. Scenestørrelse: 4060 × 60 × 70 m. Antal billeder: 2172. GSD: 1,3 cm / pix. Højde: 90 m. Overlapning foran / side: 90% / 65%.
Dronen er i stand til problemfrit at skifte fra Wi-Fi til 4G og omvendt, hvilket giver den mest pålidelige forbindelse, hvilket igen garanterer:
- Evnen til at udfør BVLOS -flyvninger
- Stabil forbindelse, selv når du flyver i miljøer med forhindringer og bygninger
- Sikker flyvning i omgivelser med høj støj
- Videolinkekvalitet 1080p @ 30 fps
- Direkte upload af billeder til cloud -servere

Optimering af flyvetid
Ifølge udvikleren er der opnået betydelige tidsbesparelser på grund af den høje ydeevne af ANAFI Ai-billedet:
- 48MP tillader dronen at flyve mere end 1,5 gange højere end droner med 20MP 1-tommer sensorer, samtidig med at den samme GSD opnås. Med andre ord går højere højde og hurtigere mission hånd i hånd.
- 1 fps fotografering: ANAFI Ai skyder dobbelt så hurtigt som Autel EVO 2 og DJI Phantom 4 Pro V2.0.
4G flyveoverførsel til PIX4Dcloud
I færd med at oprette en digital model fra luftfotografier af en drone, overføre filer og behandle fotos er to tidskrævende opgaver. ANAFI Ai hjælper brugerne med at fremskynde deres arbejdsgang. Især tillader dronesystemet:
- Overfør billeder til sikre servere direkte under flyvning ved hjælp af dronens 4G -forbindelse.
- Start straks med at beregne objekter i slutningen af flyvningen: ortomosaikker, punktsky, elevationsmodeller og struktureret mesh.
- Del let 2D-kort og 3D-modeller i undersøgelseskvalitet med medarbejdere og kunder.
![]()
PIX4D Suite -kompatibilitet
ANAFI Ai er nu fuldt kompatibel med en unik pakke med mobil-, desktop- og cloud -fotogrammetri -applikationer bestående af:
Fotogrammetri eller lidar
Hvorfor vælge fotogrammetri til undersøgelser og inspektioner? Ud over tilgængelighed og brugervenlighed er luftfotogrammetri det bedste valg, når visuel fortolkning af data er påkrævet.
Fotogrammetri -fordele
- Giver flere visualiseringer: ortomosaik, farvepunktsky, struktureret mesh.
- Opretter en sky af punkter med en højere densitet, som hver især indeholder en betydelig mængde information (højde, tekstur, farve).
- Overgår LIDAR i nøjagtigheden af fotorealistiske 2D- og 3D -gengivelser - LIDAR giver ikke et højt niveau af kontekstuelle detaljer.
LIDAR ulemper
- Koster 100 gange mere end en UAV med en RGB -matrix.
- Databehandlingens kompleksitet og mulige fortolkningsfejl.
- Tilføjelse af farveoplysninger er mulig, men det komplicerer processen.
- LIDAR genererer kun punktsky og er beregnet til specifikke tilfælde og situationer.
SDK
Parrot Software Development Kit er et sæt åbne værktøjer og software til udviklere. Siden oprettelsen af den første drone A. R. Drone, virksomhedens open source -software understøtter udviklerplatforme og -værktøjer, og Parrot
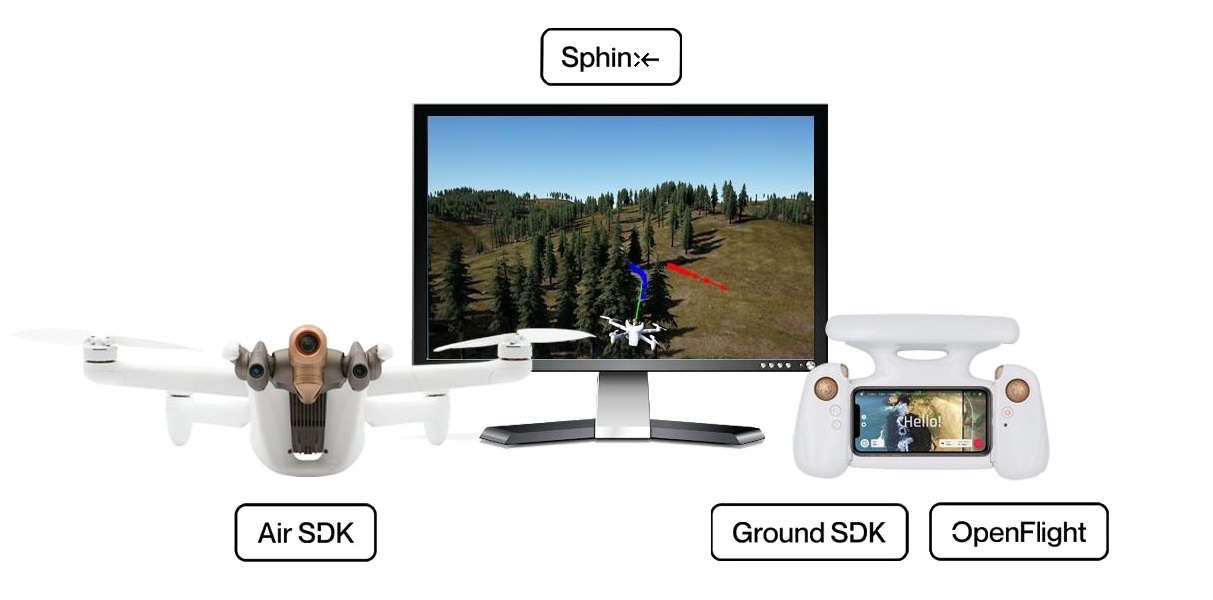
Udvikleren præciserer, at alle SDK -ressourcer i virksomheden er tilgængelige gratis, uden registrering og sporing, på portalen " Papegøje Udviklerportal"... Du kan også deltage i tusindvis af udviklere på Parrot forum, hvor du kan diskutere aktuelle emner direkte med virksomhedens ingeniører.
Air SDK
Kør din kode på ANAFI Ai
Air SDK giver en revolutionerende teknologisk arkitektur til at downloade og køre kode direkte på ANAFI Ai. Udviklere kan programmere specialdesignede flyvemissioner med adgang til alle dronesensorer, forbindelsesgrænseflader og autopilotfunktioner.
Air SDK giver indbygget adgang til:
- Alle sensorer (IMU, GPS, TOF) og flyvetilstande
- Videostream og metadata med alle kameraer
- Kommunikationsgrænseflader Wi-Fi, 4G, USB
- Dybdekort og påfyldningsgitre
- Oprettelse af forhindringsforebyggelsesbane
Enhver udvikler kan:
- Ændre dronens tilstand ved at oprette flyvemissioner
- Skift navigationstilstand
- Tilføj integrerede Linux -processer (for f.eks. overfør data over 4G -kanal eller brug computervision)
Air SDK understøtter programmeringssproget C eller Python. Air SDK leveres med detaljeret installationsvejledning og API -dokumentation. Mange anvendelseseksempler illustrerer alle mulighederne ved dens unikke arkitektur.
Ground SDK
Byg en kraftfuld mobilapp
Ground SDK er en Ground Control Station (GCS) softwareplatform til mobile enheder (både iOS og Android understøttes). Det giver enhver udvikler mulighed for at oprette en mobilapplikation til ANAFI Ai til efterfølgende kontrol af dronen direkte fra en mobil enhed. Alle BVS-funktioner (kontrol, video, indstillinger) er tilgængelige via en brugervenlig og fuldt dokumenteret API.
OpenFlight
Open Source Ground Control Station
For første gang åbner Parrot kildekoden til sin jordkontrolstationsapplikation. OpenFlight er kernen i vores berømte open source FreeFlight 7 -app. Dette giver udvikleren mulighed for at fokusere på at tilføje deres egen funktionalitet og straks have en professionelt udseende app klar til at blive offentliggjort i AppStore.

OpenFlight indeholder:
- Alle UX FreeFlight 7
- Alle grænsefladeindstillinger
- Kode til realtids 3D-visualisering af forhindringer
- Kode til håndtering af 4G-kommunikation
- OpenFlight udgives under en BSD-3-licens med en komplet installationsvejledning og omfattende dokumentation.
Sphinx
3D fotorealistisk simulering
Parrot Sphinx er et avanceret dronesimuleringsværktøj. Papegøjeingeniører bruger den til at udvikle og teste alle ANAFI Ai -funktioner. Det generelle koncept er at simulere den egentlige firmware til dronen med alle dens sensorer i et visuelt og fysisk realistisk miljø.

Parrot Sphinx tillader:
- Simuler alle kameraer og sensorer
- Simuler dybdekort og segmentering billeder
- Naviger i mange realistiske 3D -scener
- Opret forbindelse til forskellige typer fjernbetjeninger
- Brug scripts til at styre simuleringen
- Tilføj fodgængere og køretøjer
- Visualiser og registrer flyvedata
- Juster flysensorer og omgivende fysiske elementer
- Kontroller realtidsfaktor
Parrot Sphinx er bygget på grundlag af avanceret standard komponenter:
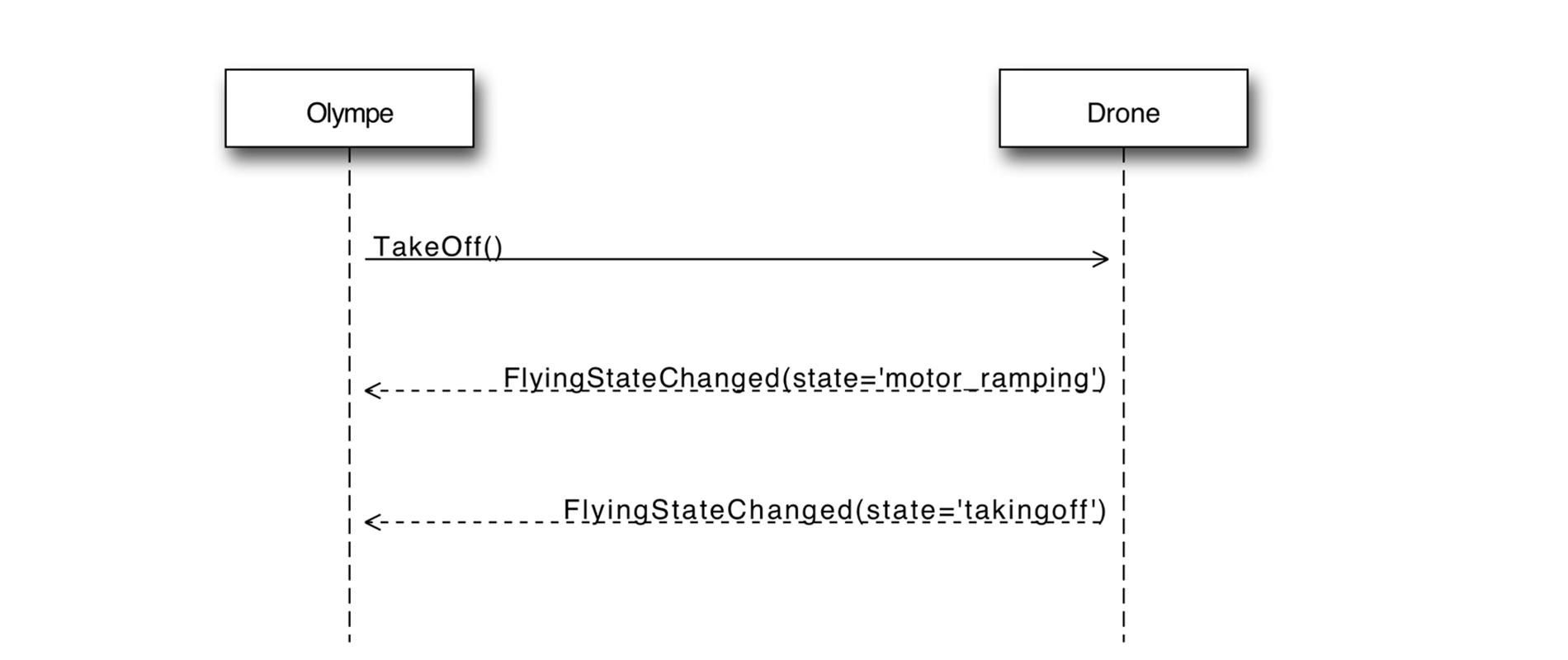
Olympe
Python til styring af ANAFI Ai
Olympe har et programmeringsinterface til Python -controller til ANAFI Ai. Olympes oprindelige formål var at interagere med Sphinx -modelleringsmiljøet. Olympe kan også styre en fysisk ANAFI Ai fra en fjerncomputer.
Olympe -ramme tillader:
- Opret forbindelse til simuleret eller fysisk ANAFI Ai
- Send kommandobeskeder (pilotering, kameraorientering, Tilbage til hjemmet, Flight Plan)
- Start og stop streaming af video fra alle kameraer
- Optag videostream og synkroniserede metadata
PdrAW
Avanceret medieafspiller
PDrAW er en avanceret videofremviser til ANAFI Ai -medier. Seeren understøtter både streaming (RTP / RTSP) og optaget (MP4) video på Linux, macOS, Android og iOS platforme. PDrAW kommer som et bibliotek (libpdraw), et wrapper-bibliotek (libpdraw-backend) og en selvstændig eksekverbar (pdraw).
PDrAW administrerer også videometadata. På ANAFI Ai inkluderer både streaming og optaget video metadata, der er offentligt tilgængelige og dokumenterede, hvilket muliggør avanceret luftfoto -behandling.
Modeller C. A. D.
Parrot leverer 3D -modeller af deres droner til integration i dit CAD -design til hurtig prototyping og tilbehørsintegration.
MAVLink og GUTMA kompatibilitet
ANAFI Ai er kompatibel med standard open source MAVLink v1 protokol, som tillader dataudveksling i realtid mellem UAV og kontrolstationen. ANAFI Ai kan styres manuelt eller ved hjælp af automatisk flyveplanlægning fra en MAVLink -kompatibel basestation, f.eks. QGroundControl.
* QGroundControl interface
ANAFI Ai er kompatibel med GUTMA open source standard flyvedataprotokol. Global UTM Association er et konsortium af store aktører inden for lufttrafikkontrolområdet.

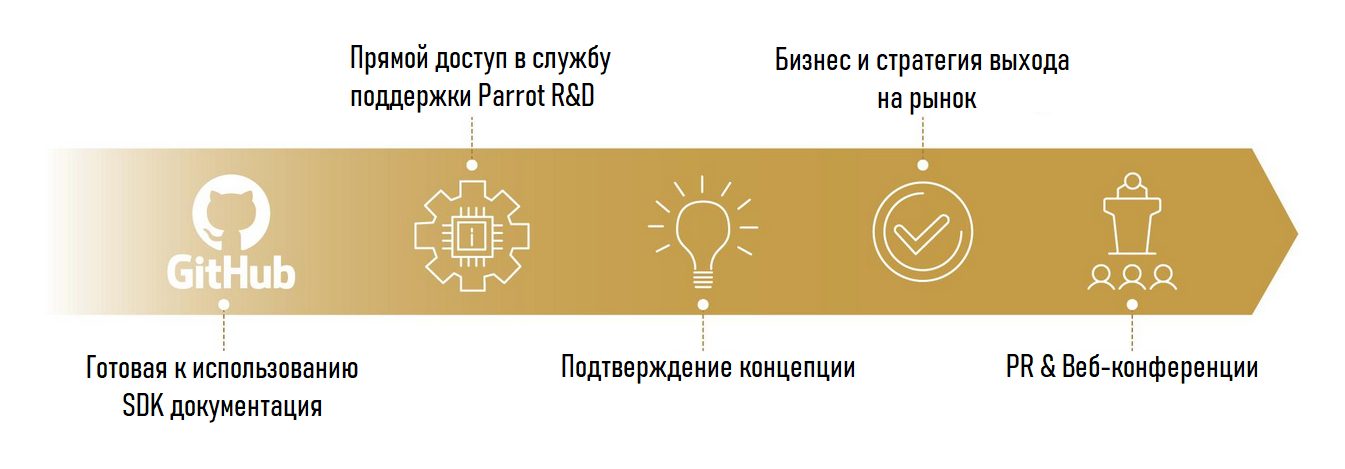
Største partnerøkosystem for droner Parrot
Parrot fortsætter med at udvide det globale økosystem af softwareudbydere til droner gennem sit partner SDK -program. at tilbyde specialiserede og unikke løsninger til de voksende og udviklende behov hos professionelle brugere.
Papegøje til enhver virksomheds behov
For at få mest muligt ud af inspektionsprocessen tilbyder Parrot sine kunder et økosystem af kompatibel dronesoftware lige fra flådestyring, kompilationsflyvning planlægge og importere flyvelogs, før optagelse, kortlægning, overvågning og analyse af de modtagne data.
PIX4D × Papegøje
2D / 3D -modelleringsprogrammer. Et unikt sæt mobil-, desktop- og cloud -fotogrammetri -applikationer.
Verizon x Skyward x Parrot
4G LTE drone -løsning i USA. Den første af sin slags ANAFI Ai robotdrone, der er forbundet til Verizon 4G LTE-netværket med forudinstalleret Skyward-software. Åbner døren til nærtidsdataoverførsler i realtid, fjerndistributioner og flyvninger uden for synsfeltet.

Skyward × Parrot
Integration og læring inden for ANAFI -kapacitet. Luftfartsstyringsplatform inklusive luftrum, adgang til LAANC og uddannelse, udstyr og tilslutning til implementering af drone -flåder i virksomheder.

DroneSense × Parrot
Byg, administrer og skaler dine drone -programmer. Ubemandede fagfolk inden for luftfartøjer i den offentlige sikkerhedssektor kan bruge den fulde pakke DroneSense -funktioner, der er specielt designet til behovene hos førstehjælpere.

Parrot Ecosystem Partners

Parrot Affiliate Program
Udvikleren tilbyder at udvide mulighederne for hans program for droner ved at integrere deres SDK.
Cybersecurity
Datafortrolighed
Udvikleren bemærker, at han ikke indsamler alle data uden brugernes samtykke. Beslutningen om, hvorvidt data skal overføres til Parrot -infrastrukturen eller ej, ligger udelukkende hos brugerne selv. De data, der er hostet i Parrot, giver brugeren mulighed for at synkronisere flyvedata og flyveplaner mellem forskellige enheder samt lette support og gøre Parrot i stand til at forbedre sine produkter.
ANAFI Ai overholder EU's generelle databeskyttelsesforordning (GDPR) og går videre, f.eks. Giver dig mulighed for at slette alle data med 1 klik og derved give brugerne den letteste kontrol. Dette et-kliksproblem løses i FreeFlight7-mobilapplikationen eller i indstillingerne for beskyttelse af personlige oplysninger for Parrot. Cloud-kontoen. Således kan brugerne til enhver tid ikke kun stoppe med at udveksle data, men også let anmode om deres sletning.
Hvis brugeren accepterer udveksling af data, vil deres behandling blive udført i et fuldstændigt gennemsigtigt format, beskrevet detaljeret i Parrot Privacy Policy.
Når ANAFI Ai er forbundet til Skycontroller 4 via 4G, bruges Parrot -infrastruktur til at parre dronen og fjernbetjeningen. Hvis brugeren ikke er logget ind på en Parrot. Cloud -konto, kan han stadig bruge en 4G -forbindelse med en unik midlertidig konto. Når du bruger Parrot -infrastrukturen til 4G -parring, krypteres videoen ved hjælp af en nøgle, der er aftalt mellem dronen og fjernbetjeningen, Parrot har ikke adgang til ukrypteret video.

FIPS140-2-kompatibel og CC EAL5 Secure Element
ANAFI Ai har et indbygget Wisekey-sikkerhedselement, der er NIST-kompatibelt FIPS140-2 Level 3 og Common Criteria EAL5 certificeret. Et lignende sikkerhedselement er også indbygget i styreenheden Skycontroller 4.
Sikkerhedselementfunktioner:
- Udfører kryptografiske operationer
- Gemmer og beskytter fortrolige oplysninger
Den bruger en personlig ECDSA -nøgle med domæneparametre P521, som er unik for hver drone. Det kan ikke udtrækkes fra sikkerhedselementet. Og certifikatet, der er knyttet til denne nøgle, er underskrevet af en certificeringsmyndighed.
Wisekey beskytter integriteten af firmwaren, giver unik drone -identifikation til 4G -parring og stærk godkendelse og unik digital signatur af fotos taget af dronen.

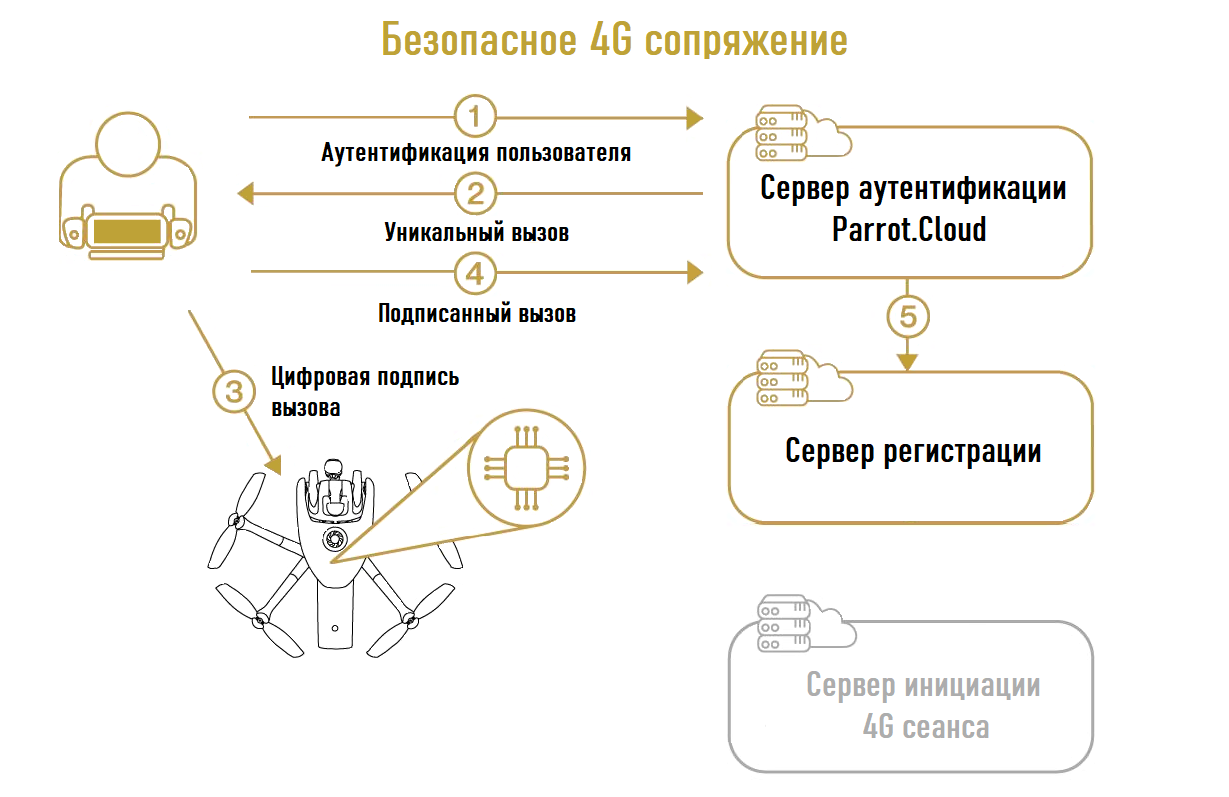
4G sikker forbindelse og stærk godkendelse
processen med sikker parring af enheder. Under denne proces bekræfter brugeren pålideligt, at han er forbundet til en bestemt drone. Takket være ANAFI Ai Secure Element kan han gøre dette uden at indtaste et kodeord inde i dronen.
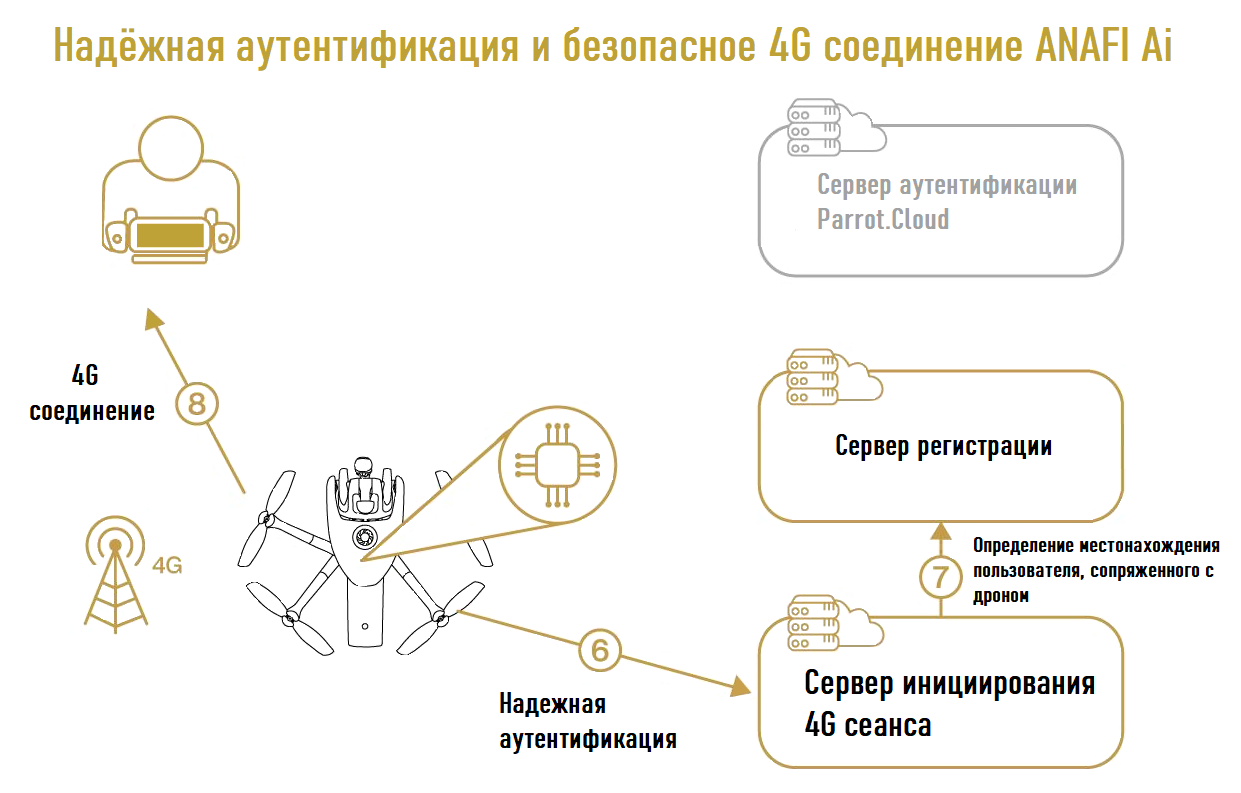
Parrot -serverne registrerer derefter kommunikationen mellem brugeren og dronen. Når Wi-Fi-forbindelsen mellem brugeren og dronen går tabt, skifter ANAFI Ai automatisk til 4G-forbindelse. ANAFI Ai udfører stærk godkendelse på Parrot -servere ved hjælp af sin private nøgle, der er gemt på Secure Element. Papegøjeservere leder efter forbundne brugere og giver interface mellem ANAFI Ai og Skycontroller 4.
For at beskytte dronekontrol og videostreams, der kommer til Skycontroller 4, understøtter ANAFI Ai TLS-, DTLS- og SRTP -protokoller.
Sikker initialisering og opdatering
Flyets boot -sekvens er beskyttet: systemet kontrollerer at den bruger Parrot -software, og at denne software ikke er blevet manipuleret. Der foretages et sikkerhedskontrol ved hver initialisering. Opdateringstjenesten styrer også den digitale signatur af softwareopdateringer.
Opsætning af brugernøgler på Secure Element
ANAFI Ai -brugere har adgang til en særlig operatorkonto Secure Element. Denne konto bruges til at konfigurere nøgler, der er relevante for denne bruger. Brugere kan konfigurere det sikre element med de offentlige nøgler til de missionsudbydere, de har tillid til. ANAFI Ai udfører kun missioner, der er underskrevet med disse nøgler. Denne proces forhindrer angribere i at udføre ondsindede flyvemissioner på dronen.
Digitalt signerede fotos
Secure Element fra ANAFI Ai kan digitalt signere dronebilleder. Denne underskrift er et bevis på, at:
- Nævnte signerede billede er taget af det angivne ubemandede luftfartøj.
- Hverken selve billedet eller dets metadata er blevet behandlet (frivilligt eller ej) - metadataene, også kendt som EXIF og XMP, indeholder oplysninger om billedets dato, tid og placering.

Med andre ord beskytter den digitale signatur alle data, der er relateret til billedet, herunder stedet og tidspunktet, da det blev taget, og som ANAFI Ai drone.
Brugere såvel som partnere, der tilbyder softwareløsninger ved hjælp af dronefotografering, kan verificere den digitale signatur af ANAFI Ai -fotos enten med dronecertifikatet eller gennem det offentlige nøglekatalog fra Parrot.
Gennemsigtighed og løbende sikkerhedskontrol med Bug bounty
Parrot bruger standardprotokoller og filformater, når det er muligt. Der er ingen skjult kode eller skjulte funktioner. Dette giver brugeren mulighed for at forstå, hvordan Parrot -produkter fungerer, og teste deres sikkerhed. Derudover er OpenFlight, softwaren, der bruges til at styre dronen, open source, hvilket giver brugerne fuld kontrol.
I april 2021 lancerede Parrot Bug Bounty -programmet med YesWeHack, Europas første crowdsourcede sikkerhedsplatform. Gennem dette partnerskab udnytter Parrot YesWeHacks enorme forskningssamfund i cybersikkerhed til at identificere potentielle sårbarheder i sine droner, mobilapps og webtjenester.
Bug Bounty -programmet består af to faser:
Private programmer giver i første omgang eksklusiv adgang til udvalgte sikkerhedsforskere og inkluderer fremtidige Parrot -dronemodeller. Forskernes erfaring og mangfoldige færdigheder vil bekræfte produkternes høje sikkerhed, inden de går på markedet, hvilket vil bidrage til at forbedre sikkerheden for Parrot -brugere og beskyttelsen af deres data.
Efter denne første runde af det private Bug Bounty -program og efter kommercialisering går produkterne ind i det offentlige program. Deres sikkerhed bliver derefter nøje undersøgt af hele YesWeHack -fællesskabet med over 22.000 cybersikkerhedsforskere.

Datahåndtering
Parrot Cloud tillader brugere, der vælger at dele deres data, at styre fly- og flådedata samt multimedie data modtaget af deres droner.
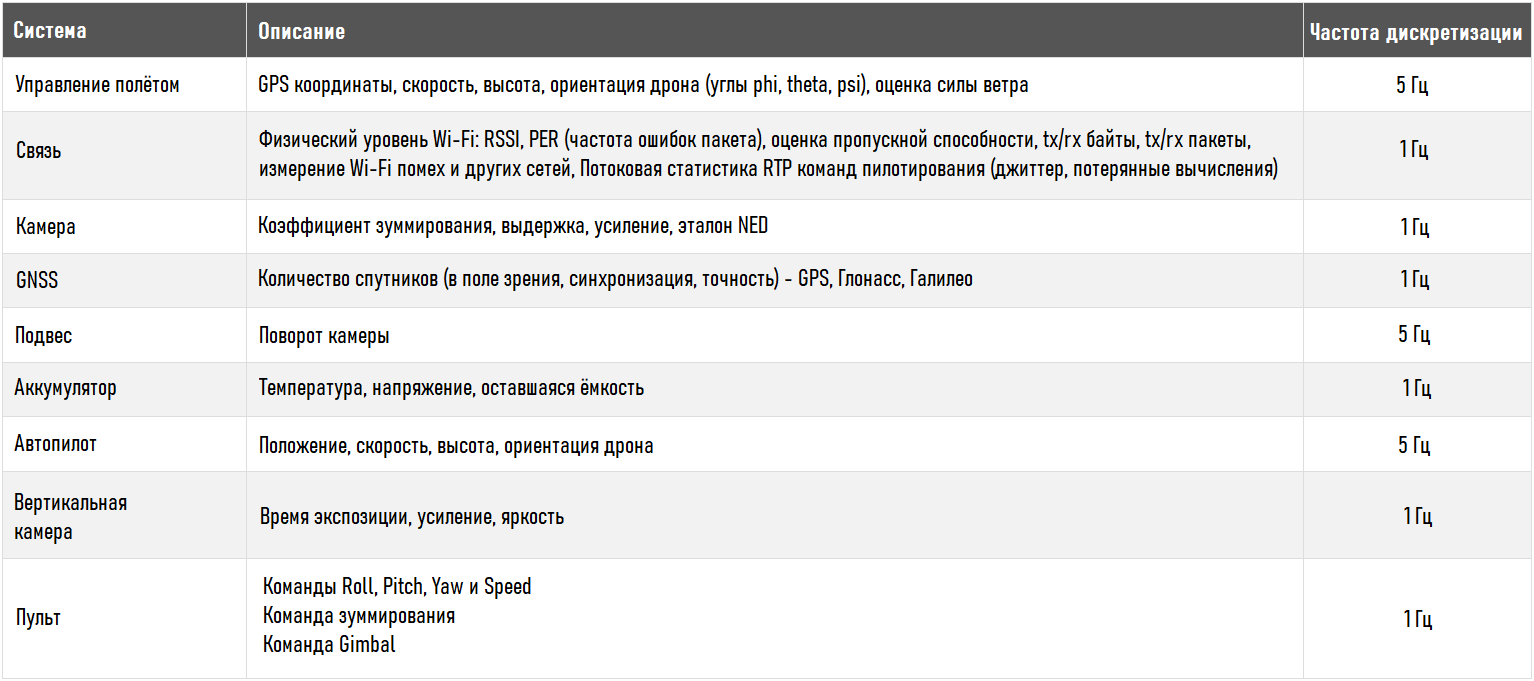
Indsamlede data
Parrot Cloud indsamler 4 datatyper:
Statisk (produktdata):
- Luftfartøjer serienummer
- Batteriets serienummer
- Luftfartøjs- og batterivirmwareversion
- Luftfartøjs- og batterihardwareversion
- Enhedsmodel
- FreeFlight 7 Release Version
Events
- Advarsler: Batteri, Autopilot, Sensorer
- Kommunikation: tilslut / afbryd, start streaming, interferensalarm, svagt signal
- Kamera: streamingstatistik, indstillingsændringer
- Flyvning: ændring af tilstand (start, landing, svæver osv.), aktivering af en flyveopgave (flyveplan, fotogrammetri)
"Kontekstuelle billeder"
- Timelapse- øjebliksbillede og (en gang hvert 2. minut)
- Deep Learning (kortlægning af flere objekter, landskaber for at forbedre flyautonomi, sporing, forhindring af forhindringer)
- Stereovision (dybdekort)
- Billeder udløst efter begivenhed
- Start og slutning af præcise svæverudsagn, præcis landing
- Drone crash
- Ansigter sløres automatisk under transmission
Telemetri
Endelig brug af indsamlede data
Papegøje indsamler og bruger kun data fra kunder, der har accepteret at dele dem for at forbedre kvaliteten af sine produkter...
Vedligeholdelsesstyring
Forebyggende vedligeholdelse: Vores værktøjer indsamler alle oplysninger vedrørende missioner (missionstype, start- og landingstider, antal missioner, droneplacering, flyvehastighed, flyveplan og AirSDK -indstillinger). Dette giver dig mulighed for at modtage nøjagtige oplysninger om status for ANAFI Ai -droneflåden (samt deres controllere og batterier) i realtid.
Korrigerende vedligeholdelse: De indsamlede oplysninger er nyttige til hurtigt at bestemme status for en bestemt drone eller et batteri.
Forbedring af kunstig intelligens (AI)
AI -elementerne i ANAFI Ai (PeleeNet, konvolutionsnetværk osv.) Tilbyder brugerne uovertrufne tjenester og funktioner: forhindring af forhindringer, målsporing, flere flyvemåder. Kvaliteten af AI afhænger af mængden og kvaliteten af de indsamlede data (billeder og videoer): disse data føder maskinindlæring. I denne henseende er datakvalitet ikke det eneste afgørende element: metadata forbundet med disse data er også grundlæggende. Af denne grund indsamler vores værktøj regelmæssigt billeder og metadata og afhængigt af begivenheder i alt 30 til 50 MB pr. Minut.
Flyveegenskaber
Aerodynamiske egenskaber
Drev og aerodynamik
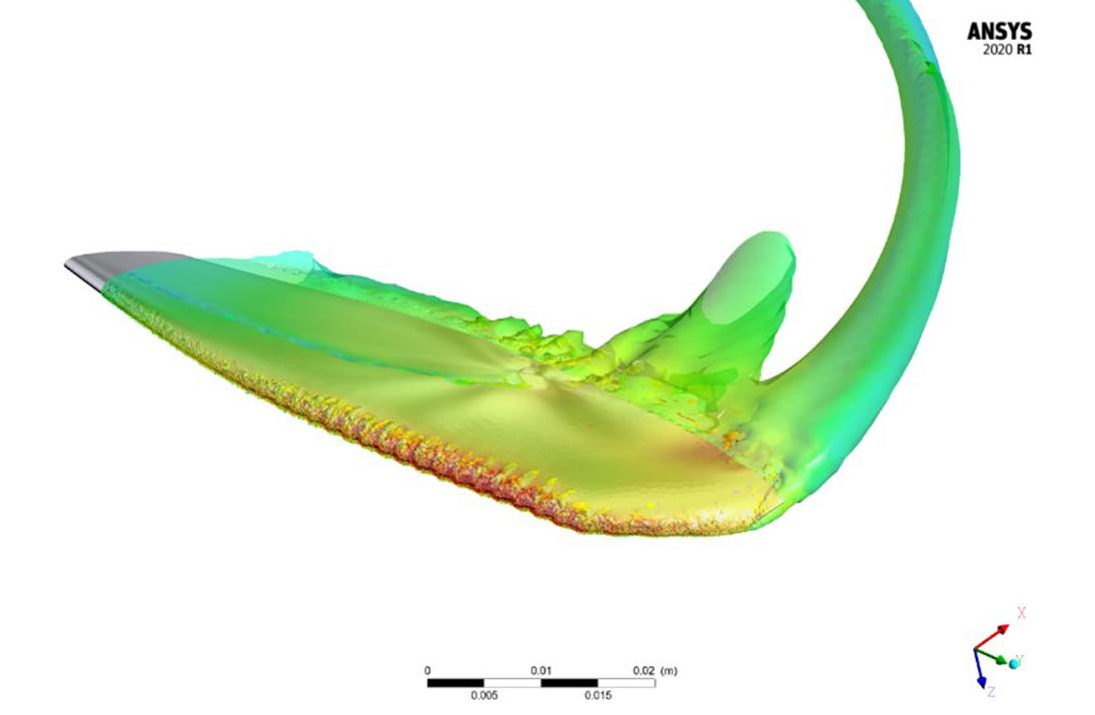 CFD-billede af ANAFI Ai-propellerblade
CFD-billede af ANAFI Ai-propellerblade
Nye biomimiske propellerblade med en pukkel-lignende forkanthval. Denne fremgangsmåde gjorde det muligt at øge kraftværkets fremdriftseffektivitet, hvilket ved udgangen gav en forøgelse af kraften ved den samme rotationshastighed. Denne effekt kan sammenlignes med en stigning i rotordiameteren.
Akustisk støj, især tonestøj, der stammer fra forkanten, reduceres også. Derfor er ANAFI Ai mere støjsvag [71,5 dB SPL (A) ved 1 m] end Skydio 2 [76,4 dB SPL (A) ved 1 m].
- Flyvetid mere end 32 minutter
- Takket være de optimerede aerodynamiske egenskaber ved flykroppen og ANAFI Ai fremdriftssystemet er den maksimale hastighed i fremadgående flyvning 61 km / t, med sidefly og baglæns flyvning 58 km / t
- Maks. vindmodstand 12,7 m / s.
- Takket være motorens / propellens høje momenteffektivitet og høje batteristyring er rækkevidden 22,5 km (ved en konstant hastighed på 50 km / t i roligt vejr).
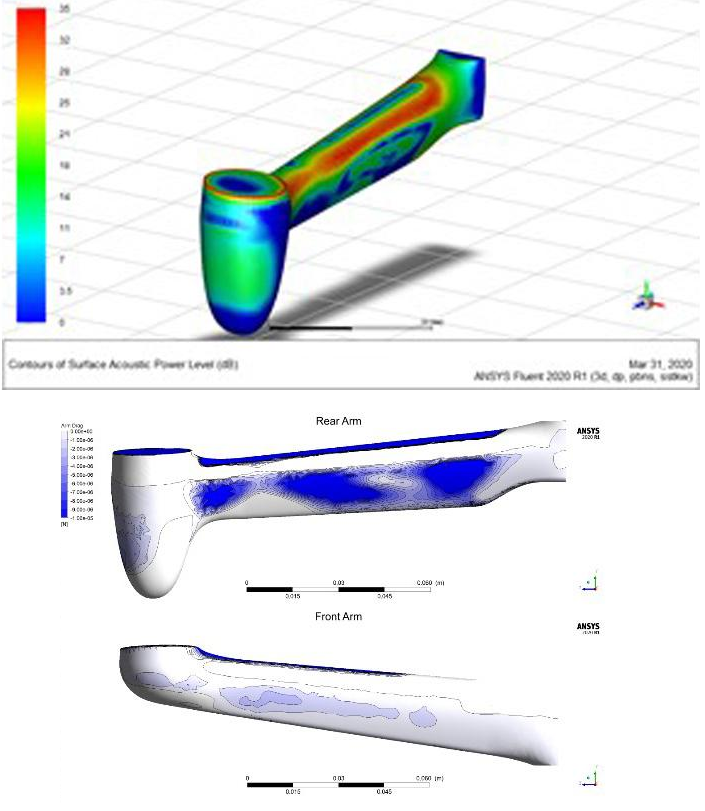 CFD -billeder af ANAFI Ai -stråler
CFD -billeder af ANAFI Ai -stråler
Sensorer
For at sikre sikker flyvning ANAFI Ai er udstyret med:
- 2 × IMU (ICM-40609-D og ICM42605)
- Magnetometer LIS2MDL
- GPS-modul UBX-M8030
- TI OPT3101 time-of-flight (ToF)
- Barometer LPS22HB
- Lodret kamera
Sensorkarakteristika
)Flight IMU: ICM-40609-D
- 3-akset gyroskop
- Område: ± 2000 ° / s
- Opløsning: 16,4 LSB / ° / s
- Offset / nøjagtighed: ± 0,05 ° / s (efter termisk og dynamisk kalibrering)
- 3-akset accelerometer
- Område: ± 16g
- Opløsning: 2.048 LSB / mg
- Offset / nøjagtighed: ± 0,5 mg (XY) ± 1 mg (Z) (efter termisk og dynamisk kalibrering)
- Temperaturregulering s: styret varmesystem i forhold til omgivelsestemperaturen, stabiliseret inden for: ± 0,15 ° C
- Målefrekvens: 2 kHz
Magnetometer: LIS2MDL
- Område: ± 49,152G
- Opløsning: 1,5 mG
- Offset / nøjagtighed: ± 15 mG (efter kompensation ved maksimal motorhastighed)
- Målefrekvens: 100 Hz
Barometer: LPS22HB 1
- Område: 260 til 1260 hPa
- Opløsning: 0,0002 hPa
- Forskydning / nøjagtighed: ± 0,1 hPa
- Temperaturregulering: styret varmesystem i forhold til omgivelsestemperaturen, stabiliseret inden for: ± 0,2 ° C
- Målefrekvens: 75 Hz
- Målestøj: 20 cm RMS
GNSS: UBX-M8030 1
- Keramisk patchantenne 25 × 25 × 4 mm, muliggør 2 dB gevinstforbedring i forhold til ANAFI 1
- Følsomhed: koldstart -148 dBm / tracking og navigation: -167 dBm
- Time-To-First-Fix: 40 sekunder
- Nøjagtighed / nøjagtighed: Position (standardafvigelse 1,4 m), hastighed (standardafvigelse 0,5 m / s)
Lodret kamera
- Billedføler format: 1/6 tommer
- Opløsning: 640 × 480 pixels
- Billedføler med global lukker
- Sort/hvid
- FOV: Horisontal synsvinkel: 53,7 ° / lodret synsvinkel: 41,5 °
- Brændvidde: 2,8 mm
- Måling af optisk strømningshastighed på jorden ved 60 Hz
- 15Hz og præcisionstilpasning @ 5Hz
ToF: TI OPT3101
- Område: 0-15m
- Opløsning: 0,3 mm
- ) Nøjagtighed b: ± 2 cm (efter kalibrering)
- Målefrekvens: 64 Hz
Lodret kamera IMU: ICM-42605
- 3-akset gyroskop
- Område: ± 2000 ° / s
- Opløsning: 16,4 LSB / ° / s
- Offset / nøjagtighed: ± 0,1 ° / s (efter dynamik Kalibrering)
- 3-akset accelerometer
- Område: ± 16g
- Opløsning: 2,048 LSB / mg
- Offset / nøjagtighed: ± 2,0 mg (XY) ± 5,0 mg (Z) - efter dynamisk kalibrering
- Målefrekvens: 1 kHz
- Hardwaresynkronisering med lodret kamera, nøjagtighed: 1 μs
Autopilot
ANAFI Ai Flight Controller giver enkel og intuitiv pilotering: ingen uddannelse er nødvendig for at betjene den. Det giver dig mulighed for at automatisere mange flyvemåder (flyplan, kameramand, håndstart, smart RTH). Sensorfusionsalgoritmer kombinerer data fra alle sensorer for at estimere ANAFI Ai -forholdet, højde, position og hastighed.
Tilstandsvurdering er afgørende for, at droner fungerer korrekt. Quadcopters er iboende ustabile, når flyvekontrolleren bruges med en åben sløjfe; for let at styre dem, for slet ikke at tale om autonom kontrol, er det nødvendigt at stabilisere dem ved hjælp af lukkede loop-algoritmer. Disse algoritmer beregner og sender kommandoerne til de motorer, der kræves af ANAFI Ai for at opnå de ønskede baner.

Indendørs flyvning
I mangel af et GPS -signal er ANAFI Ai primært afhængig af lodrette kameramålinger for at estimere hastighed og position. Den vertikale kameras ydeevne bestemmes af to hovedalgoritmer:
- Optisk flow til hastighedsestimering
- Nøglepunktsdetektering og matchning for positionsestimering
Lodret kamera algoritmer kan fungere under dårlige lysforhold takket være ANAFI Ai udstyret med et par LED -lamper placeret ved siden af det lodrette kamera. De tillader dronen at forblive stabil, især når den flyver indendørs eller i mangel af GPS, i en højde på mindre end 5 m over jorden. LED -lampernes effekt tilpasser sig automatisk afhængigt af algoritmens behov.
Autonom flyvning
Nøglefunktioner
- Rotary sensing system with wide view field
- Ekstraktion af dybden af det omgivende rum baseret på stereojustering og dybde ved bevægelse
- Miljørepræsentation i form af et fyldningsgitter
- Autonom registrering og undgåelse af forhindringer ved hastigheder op til 29 km / t
Dette kapitel beskriver de sensorer, hardware og algoritmer, der bruges af ANAFI Ai for at muliggøre autonom flyvning. Det er organiseret som følger:
- En detaljeret beskrivelse af ANAFI Ai perception system
- Perceptuelle algoritmer, der bruges til at rekonstruere 3D -miljøet omkring dronerne
- Omplanlægning og forhindring undgåelse

Opfattelsessystemstrategi
Opfattelsen af det tredimensionelle miljø er en vigtig evne til at opnå autonom flyvning, især i trange rum. Det er en forudsætning for garanteret opdagelse og undgåelse af forhindringer, hvilket reducerer byrden for droneoperatøren, øger missionens succes og sikrer flyets sikkerhed.
At frigøre det fulde potentiale i et flyvende kamera, som kan bevæge sig frit og rotere i alle retninger uden begrænsninger, kræver en effektiv sanseløsning. Især skal sensingsystemet kunne modtage information om miljøet i retninger, der svarer til den fremadrettede bevægelse under flyvning - uanset kameraets orientering.
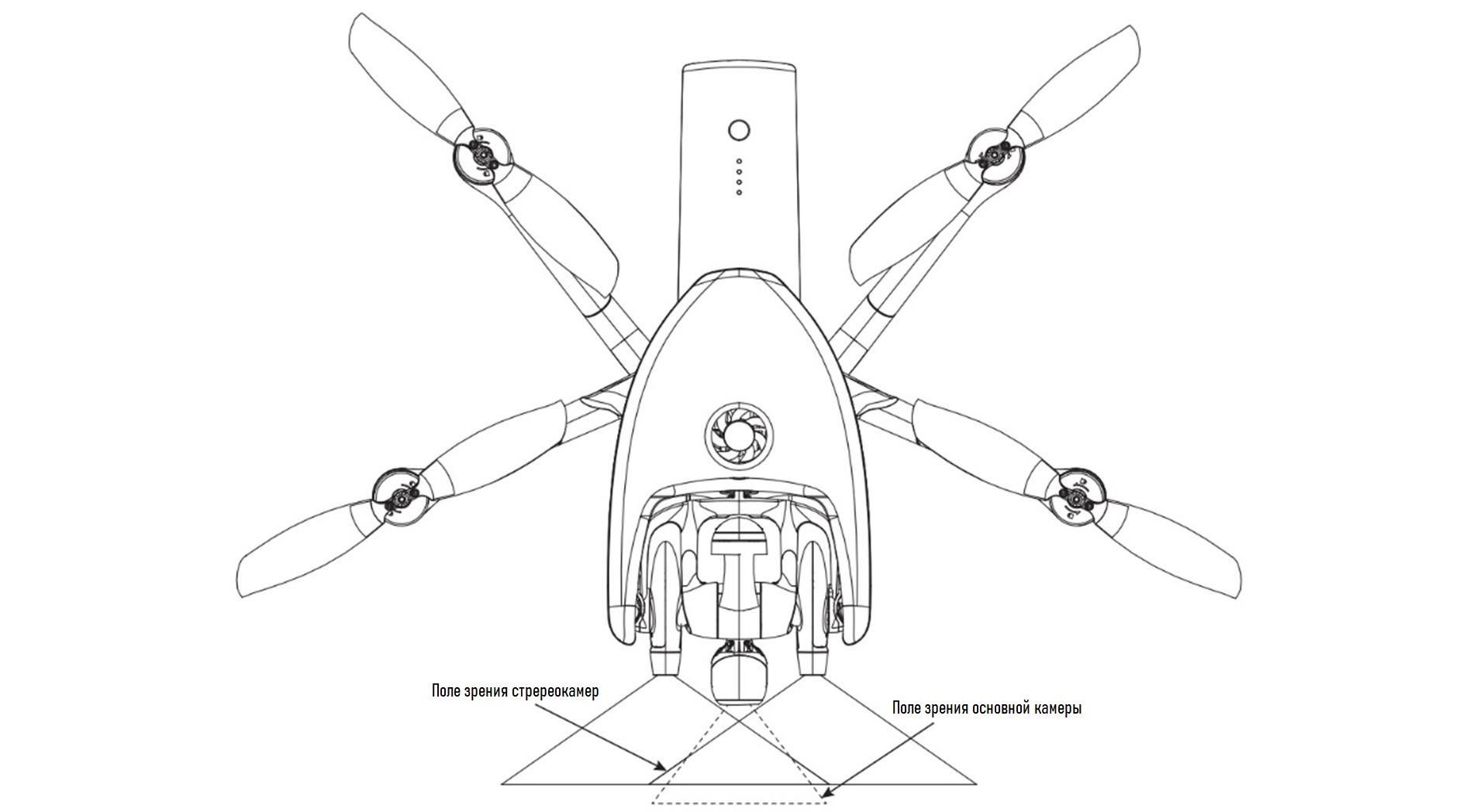
ANAFI Ai er afhængig af en unik teknisk løsning baseret på to mekaniske gimbals for at adskille orienteringen af hovedkameraet og registreringssystemet:
- Hovedkameraet er monteret på en 3- aksen gimbal, hvilket gør den 3D -orientering uafhængig af dronens orientering.
- Sensingsystemet er monteret på en enkeltakset gimbal - forbundet til dronens yaw -bevægelse, det kan orienteres i enhver retning.
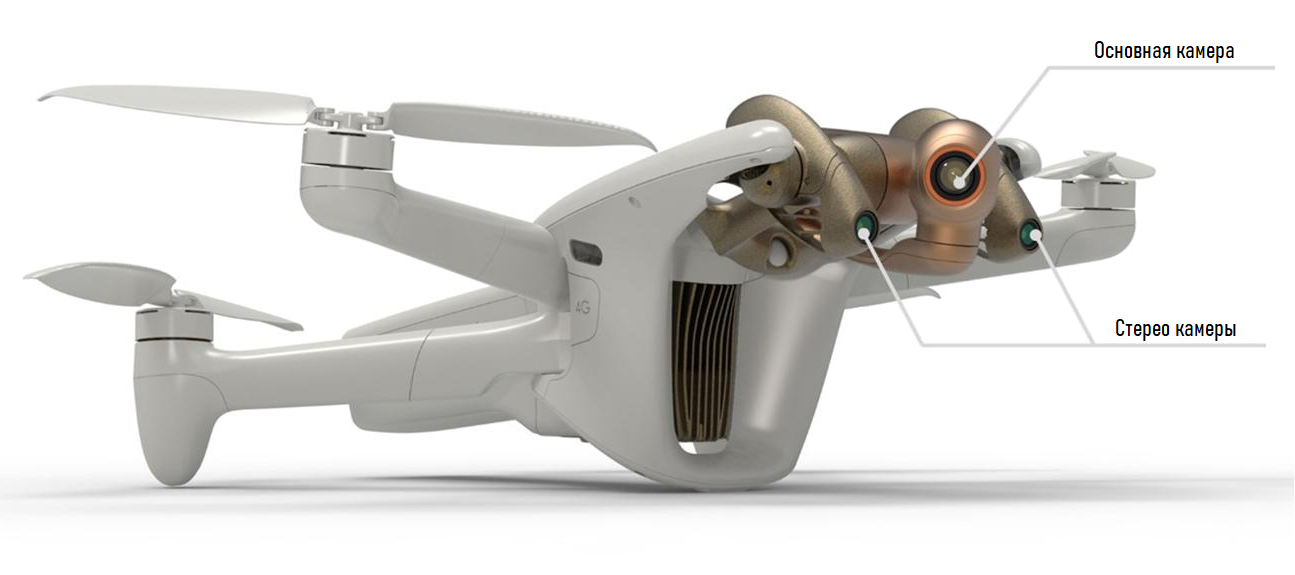 ANAFI Ai dobbeltstabilisator til opfattelse og visualisering.
ANAFI Ai dobbeltstabilisator til opfattelse og visualisering.
Tiltakserne på de to bøjler er kollinære og kombineret for at opnå et ultrakompakt design.
Takket være denne løsning er det muligt at dirigere hovedkameraet og registreringssystemet i to forskellige retninger. Dette design undgår brug af dyre kameraer på siderne, toppen, bunden og bagsiden af dronen, mens det stadig giver et stort tilgængeligt synsfelt til sensingsystemet.
Dette afsnit er organiseret som følger:
- Detaljer om de sensorer, der bruges til sensingsystemet
- Specifikationer for både hovedkameraets gimbal og sensingsystemet gimbal
- Strategier til målretning af registreringssystemet til at udnytte potentialet i den dobbelte ophængningsstruktur
Sensorer
Sensingsystemet er baseret på et par af identiske kameraer med en pitch -akse...
 1-akset mekanisk hængsel til ANAFI Ai sensing system.
1-akset mekanisk hængsel til ANAFI Ai sensing system.
Sensorspecifikationer er som følger:
- Model: Onsemi AR0144CSSM28SUD20
- Farve: Monokrom
- Opløsning: 1280 × 800 pixels
- Billedhastighed: 30 fps
- Global lukker
- Fuldt vandret synsfelt: 118 ° (110 ° kan bruges til registrering)
- Fuldt lodret synsfelt: 72 ° (62 ° anvendelig til sansning)
- Brændvidde: 1,47 mm (0,039 tommer - 492,94610 pixels)
- Blænde: f / 2,7
Specifikationer stereopar er som følger:
- Common Pitch Axis
- Baseline / Distance: 62 mm (2,44 inch)
- Synkron optagelse ved 30 fps

Dual Gimbal
Hovedkameraets mekaniske gimbal er en 3-akset mekanisk pitch-rol l -yaw "med følgende egenskaber:
- Pitch Limiters: -116 ° / 176 °
- Rullebegrænsere: / -36 °
- Yaw Limiters: / - 48 °
Sensorsystemets mekaniske affjedring er en enkeltakset affjedring med følgende egenskaber:
- Endestop i stigning: -107 ° / 204 °
- Rejsetid fra det ene stop til det andet: 300 ms
Sensingsystemet har en bevægelse på 311 ° (heraf er 296 ° ikke maskeret af dronens krop), hvilket giver mulighed for baglæns opfattelse.
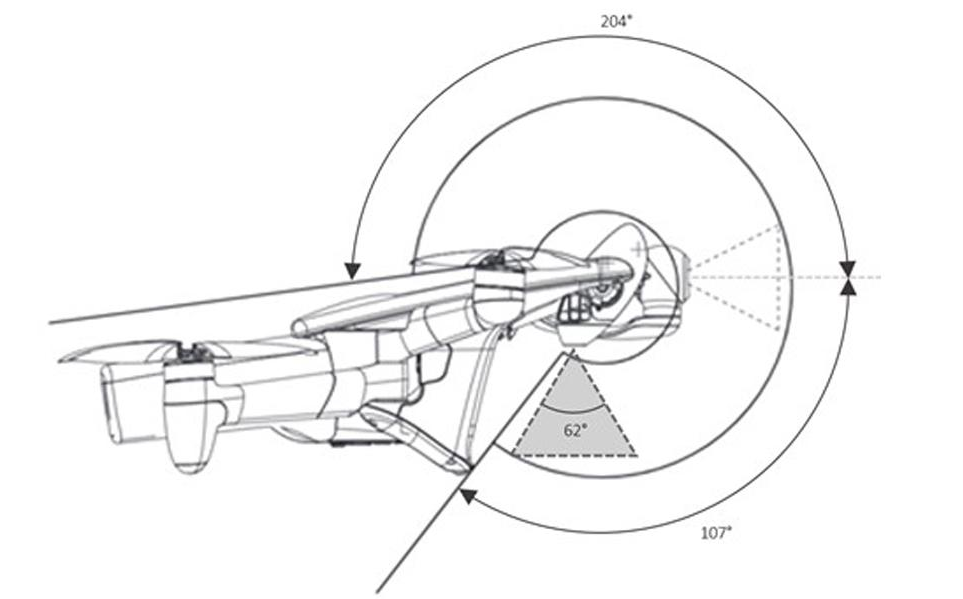
Øjeblikkeligt lodret synsfelt og begrænsende opfattelsessystemer ANAFI Ai.
Systemet er designet på en sådan måde, at:
- Propellerbladene ikke kommer ind i hovedkameraets synsfelt
- kameraet dækker ikke synsfeltet til opfattelsessystemet
- Hovedkameraet og registreringssystemet kan foldes helt tilbage for at beskytte linserne
 ANAFI Ai -opfattelsessystemets horisontale synsfelt.
ANAFI Ai -opfattelsessystemets horisontale synsfelt.
Når man læner sig tilbage, bevæger opfattelsessystemet sig til den øverste position og giver derved et klart udsyn.
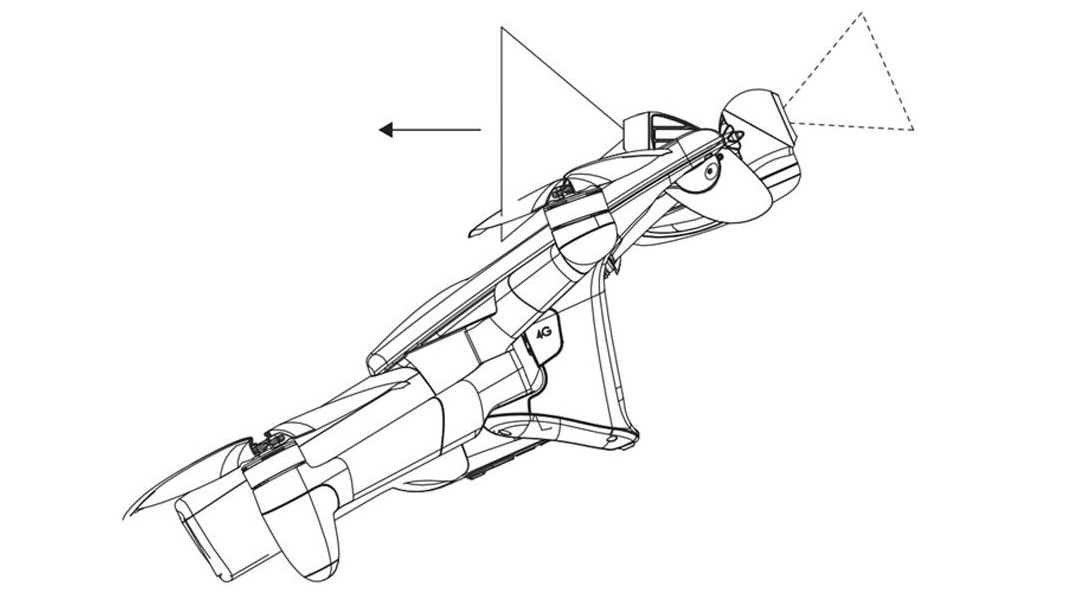
Opfattelse af ANAFI Ai i fuldt tilbagelænet position til bagudflyvning.
Rekonstruktion af miljøet
Rekonstruktion af det omgivende tredimensionelle miljø til autonom flyvning udføres i to faser:
- ) Udtrækning af dybdeinformation fra opfattelse i form af dybdekort
- Kombination af dybdekortdata til et tredimensionelt fyldningsgitter
To metoder bruges til at opnå dybdekort fra perception sensorer:
- Dybde baseret på stereojustering
- Dybde fra bevægelse
Dybde fra stereokorrespondance
Hovedmetoden til udtrækning af dybde information er baseret på parallaks mellem to stereokameraer i opfattelsessystemet. Ved at fotografere miljøet i en retning, men fra to forskellige positioner, vises objekter i synsfeltet i opfattelsessystemet i forskellige positioner i billederne opnået med to kameraer. Jo tættere motivet er, desto større er forskellen i position.
Strategien er således at bestemme punkterne i billederne opnået med venstre og højre stereokamera, der svarer til det samme objekt i sansningsfeltet til sensingsystemet, og måle forskellen i placeringen af disse punkter i de to billeder. Denne forskel kaldes forskellighed og måles i antallet af pixels.
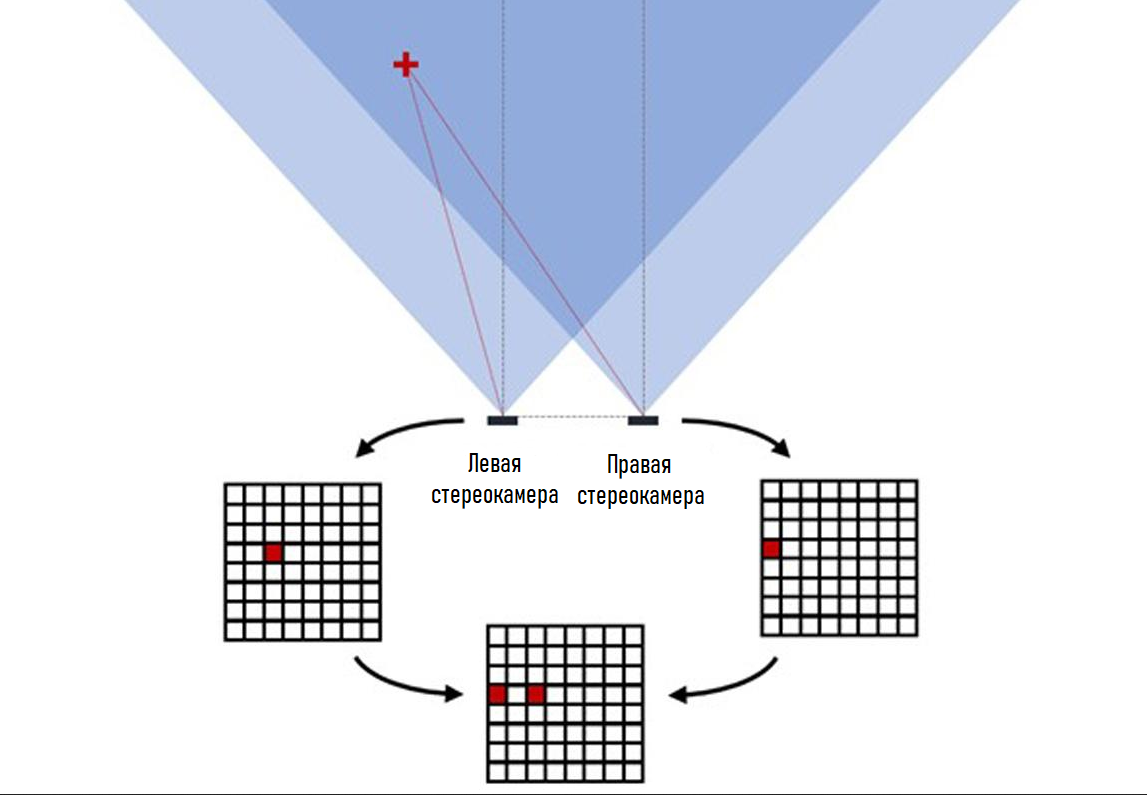 Illustration af princippet om stereosyn - det røde 3D -punkt er i forskellige positioner på venstre og højre billeder.
Illustration af princippet om stereosyn - det røde 3D -punkt er i forskellige positioner på venstre og højre billeder.
Forskellen kan derefter relateres til dybden af hvert af disse punkter ved hjælp af følgende relationsdybde = fokal * baseline / forskel, hvor dybden og grundlinjen udtrykkes i de samme enheder, og fokalområdet længde og forskel udtrykkes i antallet af pixels.
Resultatet af beregningen har form af et dybdekort på 176 × 90 pixels, for hvilke værdien af hver pixel svarer til dybden i meter. Dybdekortet opdateres ved 30 Hz.
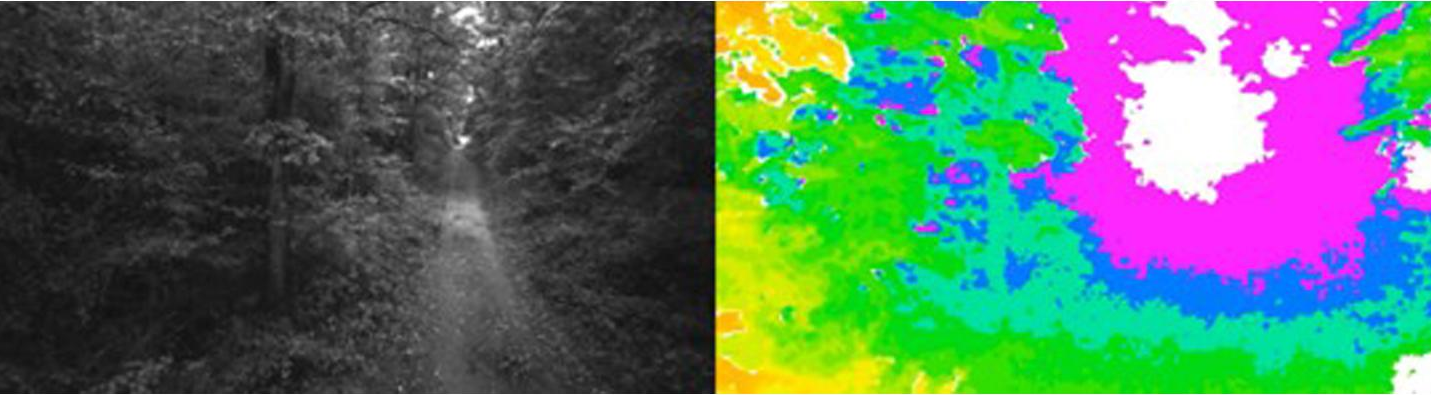
Et eksempel på et billede taget med det højre kamera på ANAFI Ai -sensingsystemet (venstre) og den tilsvarende dybde opnået ved hjælp af stereobilledbehandling (højre). Farvekortet går fra rød (tættere) til lilla (længere) - hvid betyder Out of Reach.
Det umiddelbare resultat af dette er, at dybden målt ved denne metode diskretiseres, da forskellen kun kan tage diskrete værdier (antal pixels). Et 3D -punkt placeret langt nok fra opfattelsessystemet og skaber en teoretisk forskel på mindre end en pixel vil blive betragtet som uendelig, da den tilsvarende faktiske diskrete forskel vil være lig med 0. Nøjagtigheden af stereosammenligningsmetoden falder med stigende afstand, selvom der er er metoder, der kan reducere dette fænomen ved at opnå prøveudtagning af subpixel.
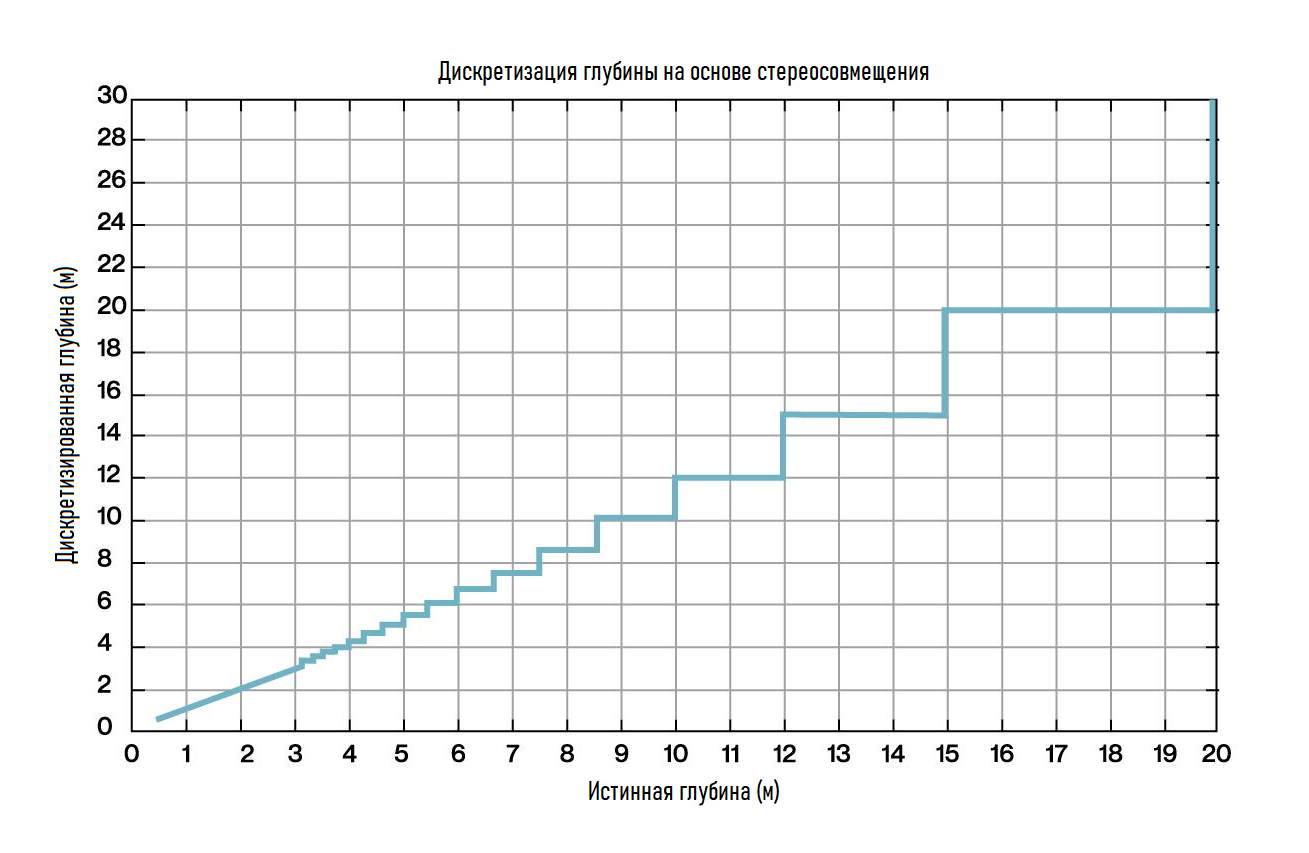 Diskretiseret dybde målt ved "stereojustering" versus "sand dybde".
Diskretiseret dybde målt ved "stereojustering" versus "sand dybde".
Desuden afviger forskelligheden, når dybden nærmer sig nul. Da antallet af pixels i billeder er begrænset, er forskellighedsværdien også begrænset. Som en konsekvens er der en minimumsdybde, hvor det perceptuelle system er blint. Denne minimumsdybde er 36 cm for ANAFI Ai.
Om kalibrering: Hvert par stereokameraer er fabrikskalibreret for nøjagtigt at måle små uoverensstemmelser, der kan være mellem de to kameraer og kompensere for dem ved indbyggede dybdeberegninger.
Brugeren kan også kalibrere et par stereokameraer ved hjælp af det testmønster, der fulgte med dronen. Især i nogen grad er dronen i stand til at registrere potentielle kalibreringsfejl, der kan opstå i løbet af dens levetid. I dette tilfælde vil flysoftwaren forsøge at justere og kompensere for dem, og hvis dette mislykkes, vises der en meddelelse, hvor du bliver bedt om at kalibrere igen.
Dybde fra bevægelse
Dronens bevægelse kan også bruges til at indsamle billeder af miljøet fra forskellige vinkler og dermed rekonstruere dybdeinformation. Denne teknik kaldes bevægelsesdybde eller monokulær sansning, fordi et enkelt kamera i bevægelse er tilstrækkeligt til at indsamle dybdeinformation.
Funktionsprincippet ligner stereosyn, men i stedet for at sammenligne billeder af miljøet opnået af forskellige observatører på samme tid, sammenligner opfattelsen billeder af miljøet opnået af den samme observatør på forskellige tidspunkter. Hvis dronen bevæger sig, vil billederne fra denne unikke observatør blive taget fra forskellige vinkler. Ved at kende den position, hvor hvert billede blev taget, er det muligt at triangulere punkter svarende til den samme funktion i forskellige billeder og returnere dem til 3D.
Outputtet er en tredimensionel punktsky, der indeholder op til 500 punkter for ANAFI Ai, genereret med en frekvens på 10 Hz.
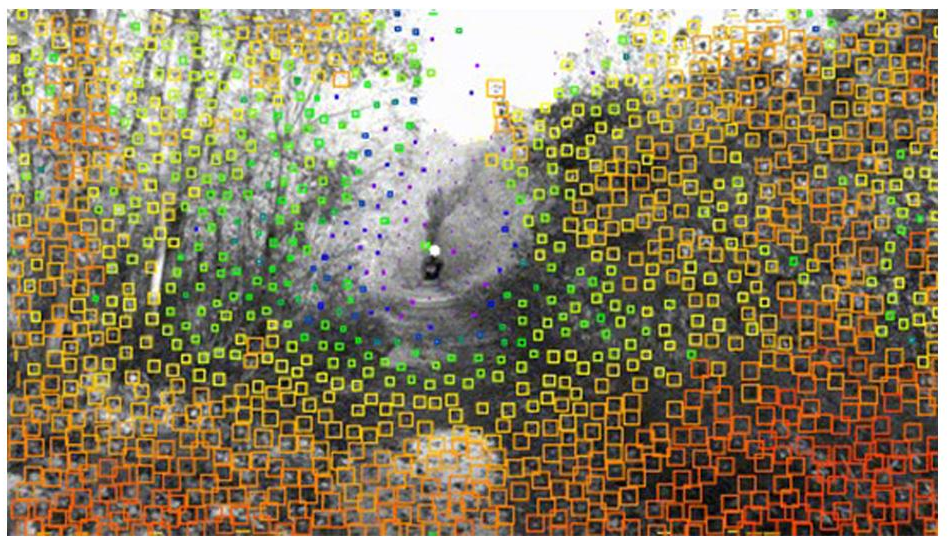 Et eksempel på en punktsky oprettet baseret på dybde fra bevægelse - farvekortet går fra rødt (tættere) til lilla (længere).
Et eksempel på en punktsky oprettet baseret på dybde fra bevægelse - farvekortet går fra rødt (tættere) til lilla (længere).
ANAFI Ai Motion Depth -algoritmen genererer typisk mindre information (sparsom sky) end stereomatchingsalgoritmen og kræver, at dronen bevæger sig for at indsamle information. Desuden kan denne algoritme ikke udtrække information i den nøjagtige bevægelsesretning (i hvert fald ved live -udsendelser), da objekter i billederne fremstår næsten stationære i denne retning (ekspansionsfokus).
Den har imidlertid et bedre registreringsområde (teoretisk uendeligt område) end stereomatchning.
Fill Grid
Dybdeinformation fra stereo- og monokulære sensoralgoritmer er integreret i Fill Grid. Denne maske prøver 3D -miljøet i 3D -terninger kaldet voxels. Hver voxel tildeles sandsynligheden for at blive besat af en forhindring eller omvendt være fri for en forhindring.
En stråletransmissionsalgoritme bruges til at integrere dybdeinformation i et fyldgitter. For hver pixel af dybdekortet opnået som følge af stereosammenligning konverteres det til et tredimensionelt punkt og for hvert punkt i punktskyen - til den dybde, der opnås som følge af bevægelse:
- En stråle tegnes i fyldningsgitteret fra opfattelsessystemets position til 3D -punktets position.
- Sandsynligheden for, at en voxel, der indeholder et 3D -punkt, bliver optaget, øges.
- Sandsynligheden for, at alle voxler, der krydses af en anden stråle end den, der indeholder 3D -punktet, er optaget, reduceres.
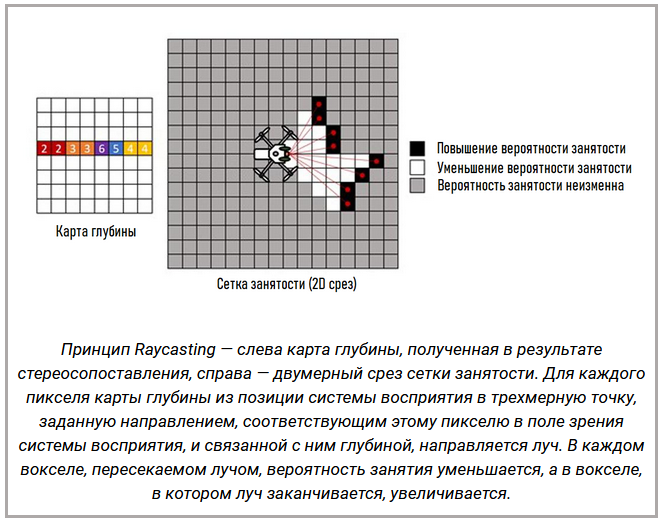
Gitteret fungerer således som et tidsfilter for dybdeoplysninger, der absorberer eventuel støj i dybdemålingen og som en hukommelse fra tidligere målinger, hvilket tillader dig til at navigere i vanskelige miljøer, selv i mangel af et kontinuerligt 360 ° synsfelt på opfattelsessystemet.
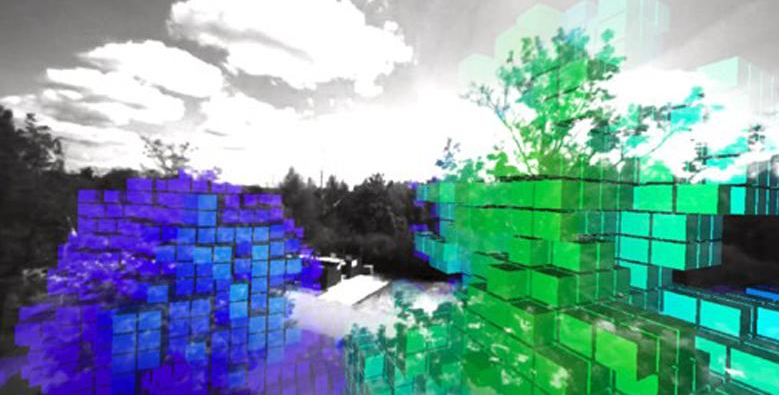 Et eksempel på et fyldgitter. Voxels er lagt oven på den rigtige stereokameravisning med en høj grad af sikkerhed for, at de har travlt, lige fra rød (nær) til lilla (langt).
Et eksempel på et fyldgitter. Voxels er lagt oven på den rigtige stereokameravisning med en høj grad af sikkerhed for, at de har travlt, lige fra rød (nær) til lilla (langt).
Udfyldningsgitteret er grundlaget for bevægelsesplaneringsalgoritmerne, der bruges af ANAFI Ai til autonom flyvning og forhindring af forhindringer.
Undgåelse af forhindringer
Takket være kendskabet til 3D -miljøet for dronen, der er gemt i udfyldningsgitteret, kan ANAFI Ai undgå forhindringer. Dette giver betydelig ekstra sikkerhed for autonome missioner, men er også nyttig til manuel flyvning, især hvis sigtelinjen mellem piloten og dronen er svækket.
Hver 30. ms forudser ANAFI Ai, hvad den nominelle korte tidshorisont vil være i fremtiden. Denne forudsigelse udledes af de links, der indsendes af brugeren, uanset om det er flyvekommandoer fra fjernbetjeningen, waypoints, der skal knyttes til en flyveplan, eller en inputbane. Derefter beregner omlægningsalgoritmen ved hjælp af den simulerede interne dronemodel de mindste mulige korrektioner til denne forudsagte nominelle bane, der gør den kollisionsfri og mulig for dronen.
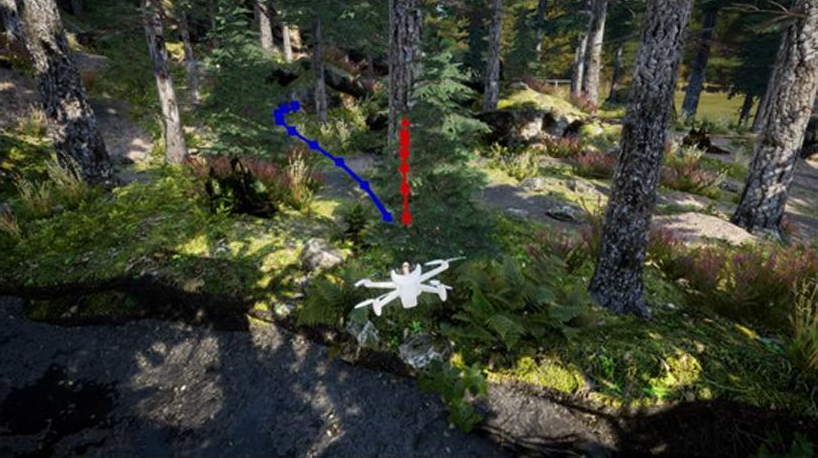 Et eksempel på en justeret bane beregnet af forhindrings undgåelsesalgoritmen som reaktion på en kollision af referencebanen med et træ.
Et eksempel på en justeret bane beregnet af forhindrings undgåelsesalgoritmen som reaktion på en kollision af referencebanen med et træ.
ANAFI Ai forhindringssystem til forhindring blev designet til at køre med hastigheder op til:
- Niveauflyvning: 29 km / t
- Klatring: 14 km / h
- Nedstigning: 11 km / t
Undgåelsesegenskaber er begrænset i regn eller stærk vind, svagt lys eller forstyrret satellitnavigation. Desuden skal du sørge for, at linserne på sensingsystemet er rene, inden du flyver.
Flight Missions

Nøglefunktioner
Air SDK (se. SDK -sektion) giver udviklere adgang til alle dronesensorer, kameraer, tilslutningsmuligheder og standalone -funktion. Derfor kan de tilpasse dronens adfærd til at oprette flyvemissioner. Hver flyvemission indeholder et sæt grundlæggende adfærd eller tilstande:
- På jorden: Adfærd, når motorerne standses, f.eks. Sensorkalibrering.
- Start: forskellige startstrategier
- Hover: hold et fast punkt
- Flight: manual funktioner og autonom flyvning
- Landing: forskellige landingsstrategier
- Kritisk: ved påvisning af en kritisk tilstand
Tilpassede flyvemissioner kan skabe ny adfærd eller genbruge dem fra standardmissionen.
Pris og tilgængelighed
Salgsstart for ANAFI Ai -dronen er planlagt til september 2021. Prisoplysninger er ikke oplyst i øjeblikket. Vi fortsætter med at overvåge de indgående oplysninger og vil helt sikkert opdatere dette afsnit på et senere tidspunkt.

Dokumentation til download
Dokumentation for at stifte bekendtskab med produktet fra udvikleren:
Videoer
Topanmeldelser ANAFI Ai fra udvikleren og brugerne
Udpakning og første flyvning.
Testflyvning af dronen på rækkevidde med 4G -forbindelse. Den samlede flyvetid var 29 minutter ved en gennemsnitlig vandret flyvehastighed på 58 km / t (16 m / s). I løbet af denne tid kunne dronen tilbagelægge 27 km. Du kan også bemærke, at flyvningen blev udført under stærke vindforhold, som konstant blev advaret af dronesystemet.
.






