
- 1 Introduzione
- 2 Lo sviluppatore sulla macchina
- 3 Caratteristiche
- 4 Pacchetto contenuto
- 5 Specifiche
- 5.1 Drone
- 5.2 Comunicazione
- 5.3 Sistema di navigazione
- 5.4 Skycontroller 4
- 5.5 Batteria intelligente del velivolo
- ) 5,6 App
- 5,7 Fotocamera
- 5,8 Modalità di volo autonomo
- 5,9 Sicurezza informatica
- 5.10 Parrot SDK
- 6 Aspetto
- 7 Comunicazione
- 7,1 4G
- 7,2 Max. portata con connessione 4G
- 7.3 Wi-Fi
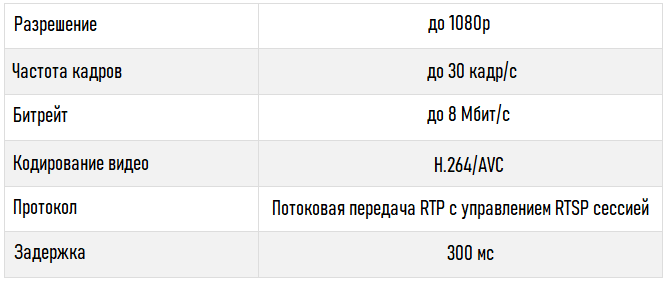
- 7.4 Live video
- 8 Telecamera
- 8.1 Matrice 48MP
- 8.2 Obiettivo
- 8.3 Modalità video
- 8.4 Codifica video
- 8.5 HDR
- 8.6 Modalità foto
- 9 Stabilizzazione ibrida
- 9.1 Gimbal fotocamera principale
- 10 Fotogrammetria
- 10.1 Ispezione e cartografia
- 10.2 Capacità AI e 4G
- 10.3 Volo autonomo
- 11 Fotogrammetria o lidar
- 11.1 Pro fotogrammetria
- 11.2 Contro LIDAR
- 12 SDK
- 12,1 Air SDK
- 12.2 Ground SDK
- 12.3 OpenFlight
- 12,4 Sfinge
- 12,5 Olympe
- 12,6 PdrAW
- 12,7 Modelli C. A. D.
- 12.8 Compatibilità MAVLink e GUTMA
- 13 Il più grande ecosistema partner per i droni Parrot
- 13.1 Parrot per qualsiasi esigenza aziendale
- 14 Cybersecurity
- 14.1 Privacy dei dati
- 14,2 Conforme a FIPS140 -2 e certificato da CC EAL5 Secure Element
- 14.3 Connessione sicura 4G e autenticazione forte
- 14.4 Inizializzazione sicura e aggiornamento
- 14.5 Impostazione delle chiavi utente su Secure Element
- 14.6 Foto firmate digitalmente
- 14.7 Trasparenza e controllo di sicurezza continuo con bug bounty
- 15 Gestione dati
- 15.1 Dati raccolti
- 15.2 Utilizzo finale dei dati raccolti [1 26]
- 15.3 Miglioramento dell'intelligenza artificiale (AI)
- 16 Caratteristiche di volo
- 16.1 Caratteristiche aerodinamiche
- 16.2 Attuatori e aerodinamica
- 16.3 Sensori
- 16.4 Caratteristiche dei sensori
- 16.5 Pilota automatico
- 17 Volo autonomo
- 17.1 Caratteristiche principali
- 17.2 Strategia del sistema di percezione
- 17.3 Sensori
- 17.4 Doppia sospensione
- 17.5 Ricostruzione dell'ambiente
- 18 Missioni di volo
- 18.1 Caratteristiche principali
- 19 Prezzo e disponibilità
- 20 Scarica Documentazione
- 21 Video
Introduzione [16 4]
Parrot Anafi Ai è una soluzione unica completamente nuova di un noto sviluppatore francese
Il biglietto da visita di Anafi Ai è il modulo 4G integrato, grazie al quale il drone è stato in grado di utilizzare la quarta generazione di comunicazioni mobili come principale canale di trasmissione dati tra il drone e l'apparecchiatura di controllo, che di fatto rimuove tutte le restrizioni sul raggio di volo e predetermina il funzionamento dell'UAV al di fuori della linea di vista. Guardando al futuro, notiamo che il potenziale dichiarato della macchina si è rivelato incredibilmente potente e corrisponde più che mai al suo aspetto futuristico, che è stato ispirato dalla natura per creare ingegneri francesi.
Lo sviluppatore dell'auto
Martin Liné, direttore marketing di Parrot, i droni Parrot

Caratteristiche
Caratteristiche principali di Parrot Anafi Ai:
- Peso 898 grammi
- Tempo di volo 60 secondi
- Design pieghevole portatile unico
- Modulo di comunicazione 4G integrato per l'interazione completa drone/apparecchiatura di controllo senza restrizioni in tutte le condizioni ambientali
- Compatibile con LTE in tutto il mondo
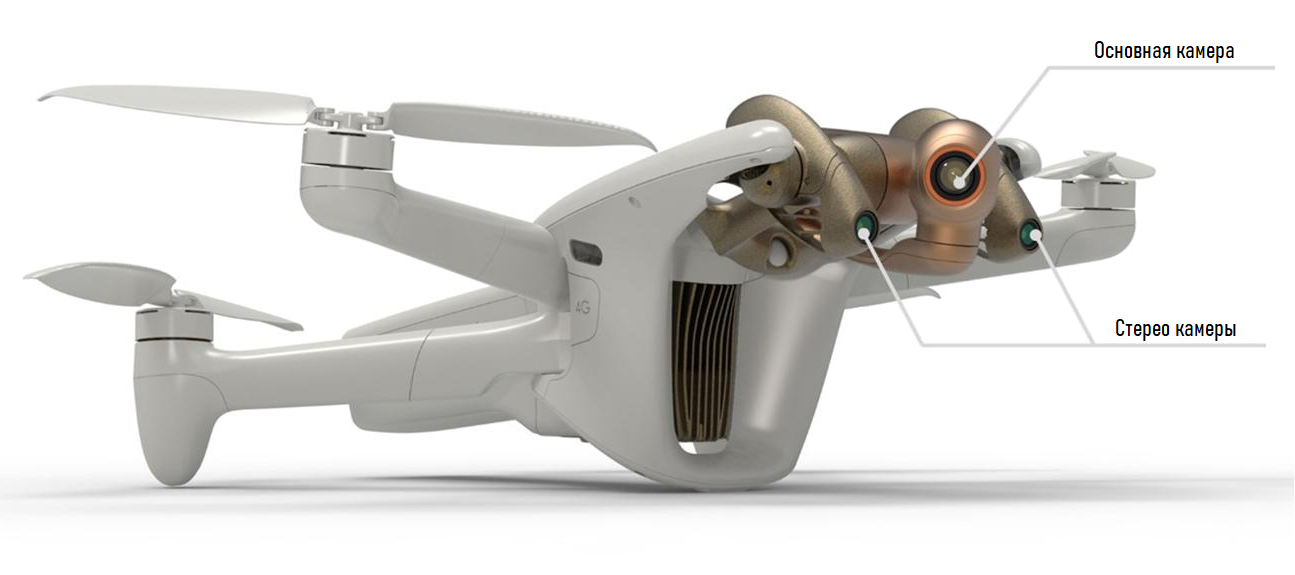
- Dotato di sistema di trasmissione del segnale omnidirezionale (4 antenne direzionali con riflettore (con guadagno: antenne 2,5 dBi/s). Il drone determina la migliore coppia di antenne a seconda del suo orientamento e posizione rispetto la posizione del pilota)
- Dotato di un esclusivo sistema di imaging omnidirezionale del mondo circostante costruito su una coppia di telecamere stereoscopiche montate su un gimbal specializzato con un intervallo di panoramica di 330 gradi (da -120 ° a 210 °), lavorando in tandem con un sistema di ottimizzazione intelligente. traiettorie di volo
- Adattato per il volo indoor
- Streaming video live in 1080p con bassa latenza (300 m / s) senza restrizioni di portata in qualsiasi parte del mondo, con bitrate video 12 Mbps
- Possibilità di trasferire file su cloud storage direttamente in volo
- Modulo di comunicazione Wi-Fi integrato (Wi-Fi 802.11a/b/g/n) per il controllo completo dell'interazione drone/attrezzatura (come un'opzione di connessione alternativa)
- Slave. Gamma di frequenza Wi-Fi: 2,4 GHz / 5,8 GHz
- max. raggio di volo FPV su Wi-Fi: 9 km
- Modalità di funzionamento automatica unica dei moduli 4G / Wi-Fi, che consente, in base alla congestione della rete, di passare senza interruzioni da una tecnologia di comunicazione all'altra senza perdita di dati
- Classe di protezione drone IPX3
- Max. tempo di volo 32 min
- Max. velocità di volo orizzontale 61 km/h
- max. resistenza al vento: 13 m/s
- max.soffitto sul livello del mare 5000 m
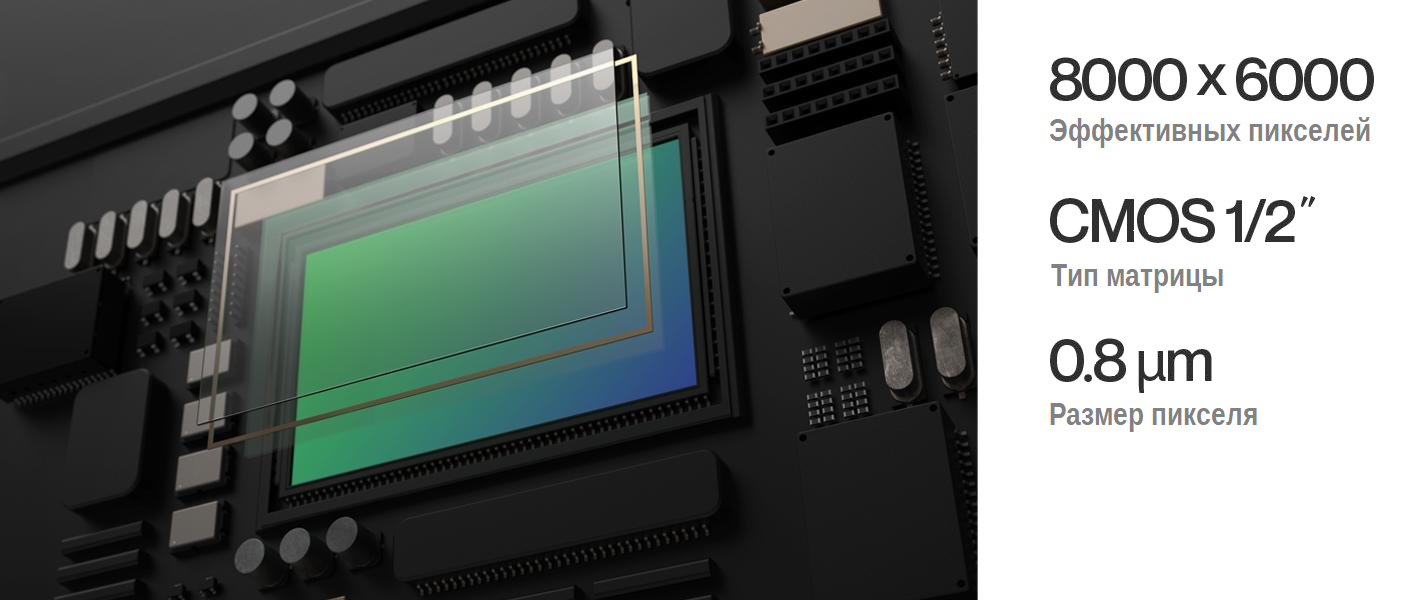
- Fotocamera 4K da 48 MP costruita su matrice CMOS da 1/2 pollice con una dimensione dei pixel di 0,8 μm; con array di filtri colorati Bayer integrato
- Obiettivo ottico LD-ASPH
- Sistema di stabilizzazione dell'immagine ibrido a 6 assi (EIS digitale a 3 assi meccanico a 3 assi)
- Controllabile gamma operativa Gimbal da -90 ° a 90 °
- Zoom digitale 6x senza perdita (2x 4K / 4x FHD)
- Max. bit rate video 200 Mbps
- Formati di registrazione video HDR8 / HDR10
- Max. gamma dinamica 14EV
- Profilo colore P-log per la post-elaborazione
- 5 × modalità di scatto e volo automatiche (fotogrammetria/piano di volo/cameraman/Smart RTH/veicolo)
- Slot integrati per schede MicroSD e SIM
- Compatibile con PIX4D Suite
- Le modalità di volo fotogrammetriche sono disponibili in mob. App FreeFlight 7 e software OpenFlight
- Creazione del piano di volo con un clic
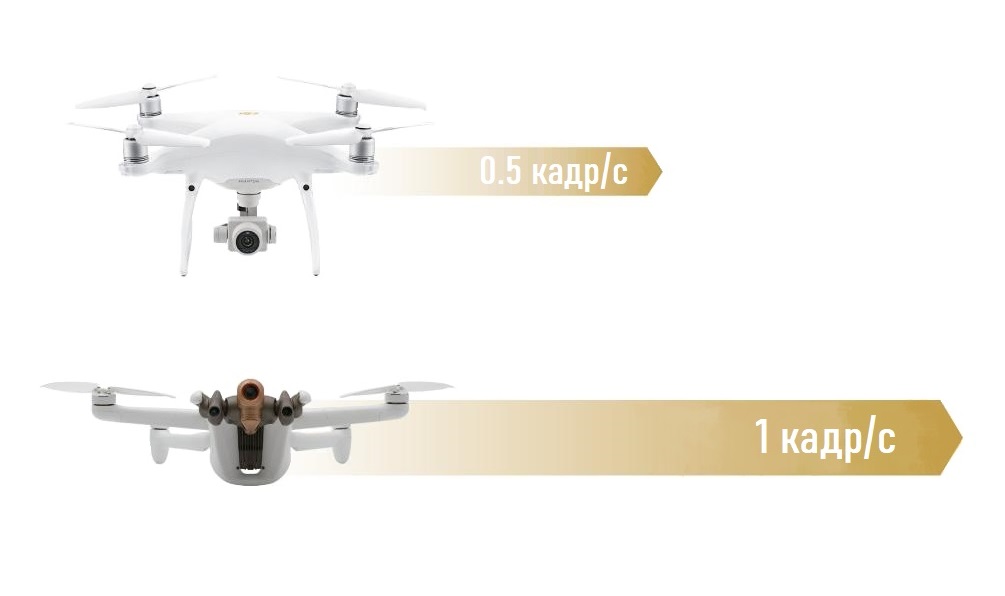
- Fotogrammetria 48MP 1 fps: due volte più veloce dei concorrenti
- Precisione di scatto: 0,46 cm/pix. GSD a 30 m
- Supporto Parrot SDK (con la possibilità di incorporare il codice nel drone utilizzando Air SDK, creare applicazioni mobili utilizzando Ground SDK, configurare una stazione di terra open source utilizzando OpenFlight, interagire con il moderno Sphinx strumento di simulazione drone, nonché scripting Python con Olympe ed elaborazione video e metadati con PdrAW)
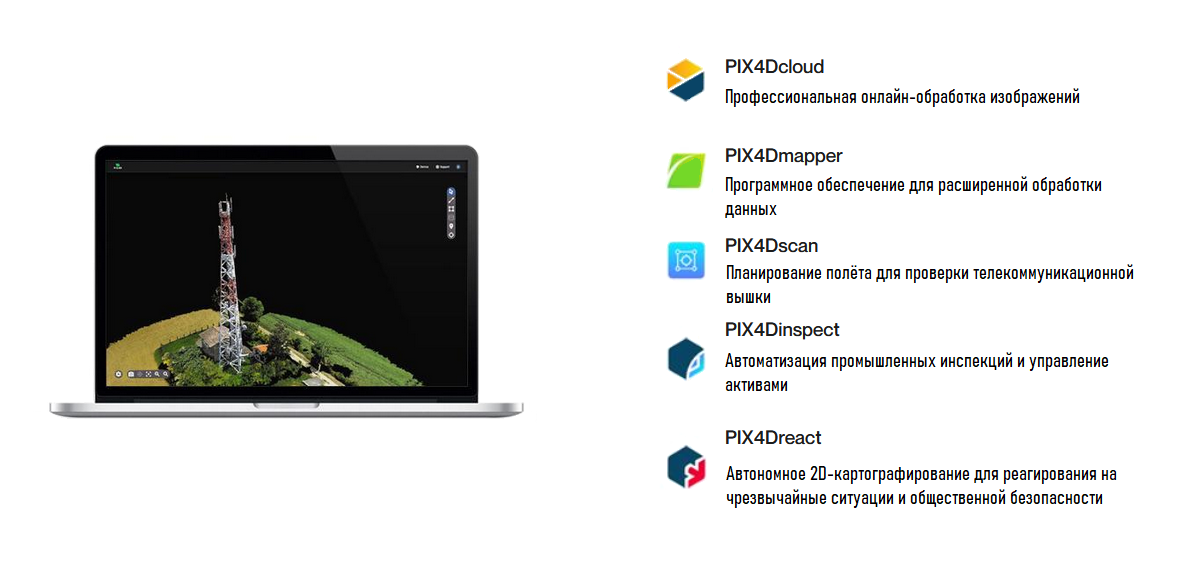
- Compatibile con software di terze parti: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- ANAFI Ai è conforme a General Normative Regolamento sulla protezione dei dati dell'Unione europea (GDPR)
- Privacy dei dati superiore con NIST FIPS140-2 livello 3 WISeKey Secure Element integrato con certificazione Common Criteria EAL5
- Video e controlli protetti con SRTP / DTLS secondo webRTC
- Nuova apparecchiatura di controllo portatile Parrot Skyco ntroller 4
- Nuova applicazione mobile Parrot FreeFlight 7

Pacchetto
Lo sviluppatore offre il drone in un'unica configurazione, che includerà:
- Drone ANAFI Ai
- Valigetta rigida per il trasporto
- Equipaggiamento di controllo Parrot Skycontroller 4
- 1 × Smart batteria
- Caricatore USB-PD
- Kit elica di ricambio (2CW / 2CCW)
- Cavo di collegamento (da USB-C a Lightning)
- 2 × Cavi di collegamento (da USB-C a USB-C)
- Grafico di calibrazione

Specifiche
Aereo

Comunicazione
Sistema di navigazione
Skycontroller 4

Batteria intelligente per aereo
App

Fotocamera

Modalità di volo autonomo
Cybersecurity
Parrot SDK
Successivamente, puoi familiarizzare con le informazioni chiave del Parrot Anafi Ai, che ti permetteranno di conoscere meglio il potenziale dichiarato della macchina, nonché quali miglioramenti sono stati implementati rispetto alla versione commerciale del drone Parrot Anfi Thermal e altri droni di marchi leader.
Aspetto





Comunicazione
4G
ANAFI Ai include modulo radio 4G (oltre a il modulo radio Wi-Fi), che consente di trasmettere un flusso video in qualità 1080p con un bitrate massimo di 12 Mbps, con una latenza molto bassa (300 ms), senza limitazioni di portata e in qualsiasi parte del mondo.
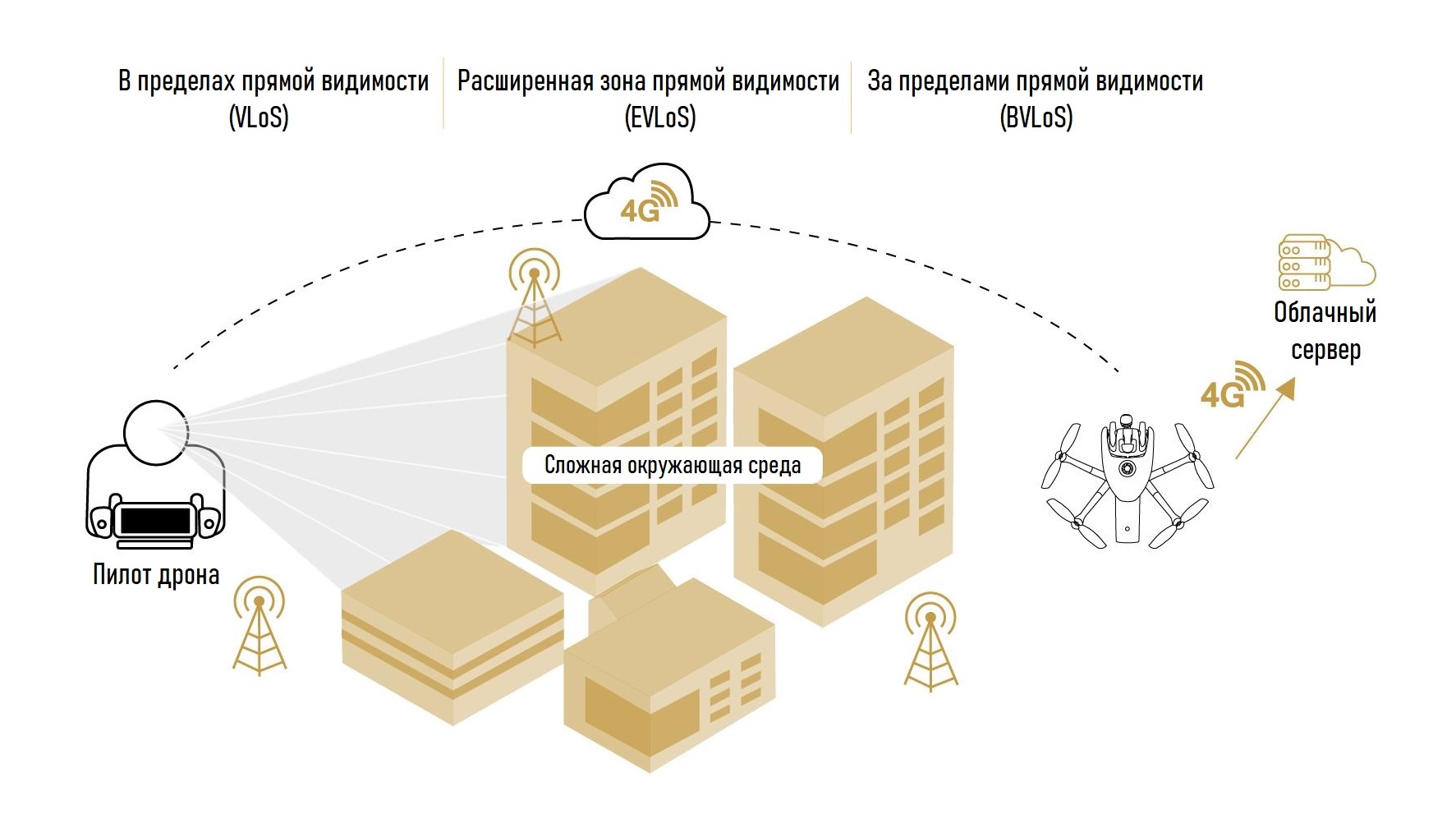
Compatibilità
Il modulo ANAFI Ai 4G supporta oltre 28 bande di frequenza, coprendo oltre il 98% delle frequenze distribuite in tutto il mondo.
Commutazione automatica di rete
La qualità e la larghezza di banda delle reti 4G e Wi-Fi vengono misurate ogni 100 ms per adattare lo streaming alle condizioni della rete. In combinazione con algoritmi di routing, la connessione tra il drone e il suo controller viene mantenuta anche quando il Wi-Fi è gravemente interrotto. Pertanto, quando la larghezza di banda effettiva (larghezza di banda utilizzabile) del Wi-Fi è inferiore a 1,5 Mbps, il sistema passerà automaticamente al 4G.
Per limitare il consumo di dati mobili quando il pilota si trova nel raggio della rete Wi-Fi del drone, anche il passaggio da 4G a Wi-Fi viene eseguito automaticamente senza interrompere il flusso video.
Max. portata con connessione 4G
Il video dello sviluppatore mostra il max. raggio di volo di Anafi Ai con connessione 4G in una direzione con una carica della batteria. Il tempo di volo totale è stato di 29 minuti a una velocità di volo orizzontale media di 58 km/h (16 m/s). Durante questo periodo, il drone è stato in grado di coprire 27 km. Si può anche notare che il volo è stato effettuato in condizioni di forte vento, che è stato costantemente avvertito dal sistema di droni.
Algoritmi di ottimizzazione del flusso video implementati
Controllo della congestione 4G
L'algoritmo di controllo della congestione consente:
- Misurare la perdita di pacchetti sull'intero ciclo di rete.
- Ritardo di misura (tempo di andata e ritorno).
- Regolare la larghezza di banda secondo questi due parametri.
L'obiettivo finale dell'algoritmo è massimizzare la larghezza di banda disponibile mantenendo la latenza più bassa possibile. Questo algoritmo è implementato su ciascuna delle interfacce disponibili nel drone, ognuna con i propri parametri, ottimizzati in base alla rete. Sulla base delle informazioni fornite da questo algoritmo, il gestore del collegamento prende decisioni sull'instradamento e sull'interfaccia attiva.
Controllo del drone tramite connessione 4G
ANAFI Ai si connette al telecomando tramite 4G in meno di 30 secondi se il drone è fuori dalla portata del Wi-Fi e in meno di 15 secondi se il drone si trova nel raggio del Wi-Fi. E anche la connessione 4G fornisce:
- Rilevamento e avvio di una connessione basata sul protocollo VOIP SIP.
- Utilizzare un server di inoltro per stabilire connessioni su reti sicure.
Prestazioni del flusso video
- Latenza: 300 ms.
- Sicurezza: video e controlli sono protetti con SRTP/DTLS secondo webRTC.
- Antenne: 28 bande LTE da 700 MHz a 2,6 GHz.

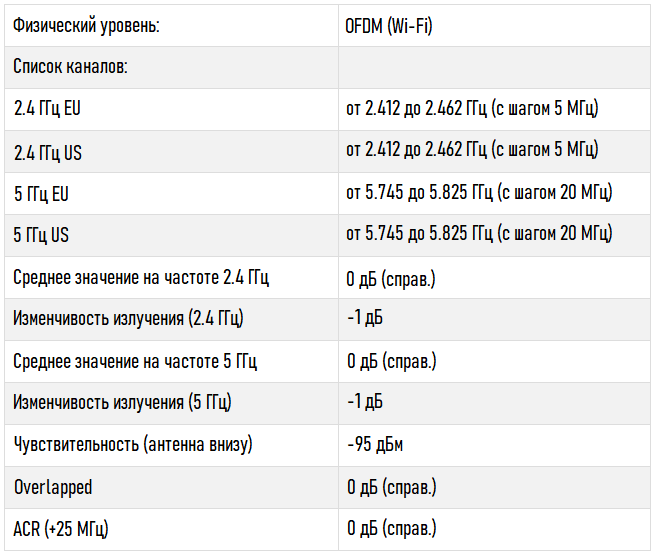
Wi-Fi
Sistema di trasmissione omnidirezionale
- ANAFI Ai ha 4 antenne direzionali a riflettore (con guadagno d'antenna: 2,5 dBi/s). Il drone determina la migliore coppia di antenne in base al suo orientamento e posizione rispetto alla posizione del pilota.
- Con un guadagno ricombinato di 3,5 / - 1,5 dBi sul piano orizzontale del drone, il guadagno RF ANAFI Ai è altamente uniforme.
- La radiazione dell'antenna a valle è stata migliorata di 4 dB rispetto ad ANAFI.
Design esterno della radio ad alta potenza
La parte anteriore della radio massimizza la potenza alla base dell'antenna con un'ottima linearità e sensibilità (-94 dBm a 6,5 Mbps) per ottenere la massima potenza di limitazione FCC.

Affidabilità Wi-Fi
Parametri 802.11
larghezza di banda ridotta, bassa latenza, variabilità del livello di ricezione dovuta alla velocità del drone, lungo raggio, presenza di interferenze. Questi parametri includono l'aggregazione, i tentativi, la tecnologia MiMo (STBC), la velocità dei dati del frame di controllo e le condizioni di disconnessione.
Prevenzione intelligente delle interferenze
ANAFI Ai dispone di un algoritmo per l'eliminazione dei canali (2,4 GHz e 5 GHz dual band) in caso di interferenza.
Adattamento e monitoraggio del flusso
ANAFI Ai monitora continuamente lo stato del suo collegamento a 4 Hz e può rilevare le interferenze. Ciò consente di ottimizzare dinamicamente la larghezza di banda e la dimensione dei pacchetti trasmessi. Avvisa anche il pilota se si trova in un ambiente particolarmente disturbato o sta per perdere il segnale.
Riduzione della larghezza di banda
Al limite della sua portata e se le condizioni lo consentono, ANAFI Ai può passare alla larghezza di banda di 10 MHz per migliorare la sua sensibilità di 3 dB e aumentare la portata del 40%.

Indicatori radio
Trasmissione video
Indicatori collegamento video
Algoritmi di ottimizzazione del flusso video implementati
Parrot Gen4 Streaming (4a generazione)
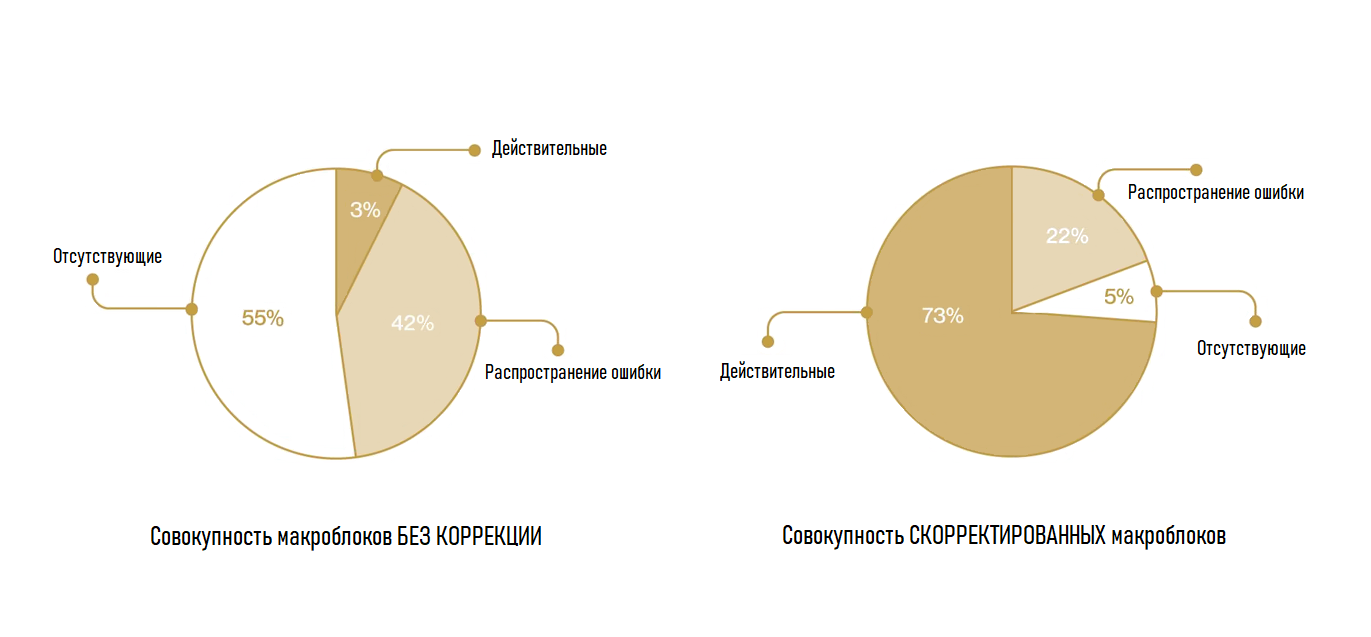
Questo algoritmo riduce l'impatto visivo delle perdite di rete e fornisce interoperabilità tutti i decoder, fornendo un flusso sintatticamente completo: le parti mancanti dell'immagine vengono ricostruite come parti mancanti, identiche a quelle dell'immagine di riferimento.
Pertanto, i difetti sono contenuti in quelle aree che sono soggette a perdita e non si applicano all'intera immagine.
I grafici seguenti mostrano la percentuale di successo per la decodifica dei macroblocchi con una perdita di rete del 5%, con e senza funzionalità di streaming avanzate ANAFI Ai. L'algoritmo garantisce la corretta decodifica del 75% dei macroblocchi. Consentono all'utente di continuare la propria missione senza congelare lo schermo o perdere lo streaming.
Controllo della congestione
L'algoritmo valuta anche l'ambiente Wi-Fi e radio per anticipare ed evitare la perdita di pacchetti e la congestione della rete, il che aiuta a ridurre la latenza. L'algoritmo si basa su una stima della capacità del canale, calcolata sulla base del data rate e del tasso di errore a livello fisico; quindi influisce sulla codifica di rete e sui parametri di incapsulamento.
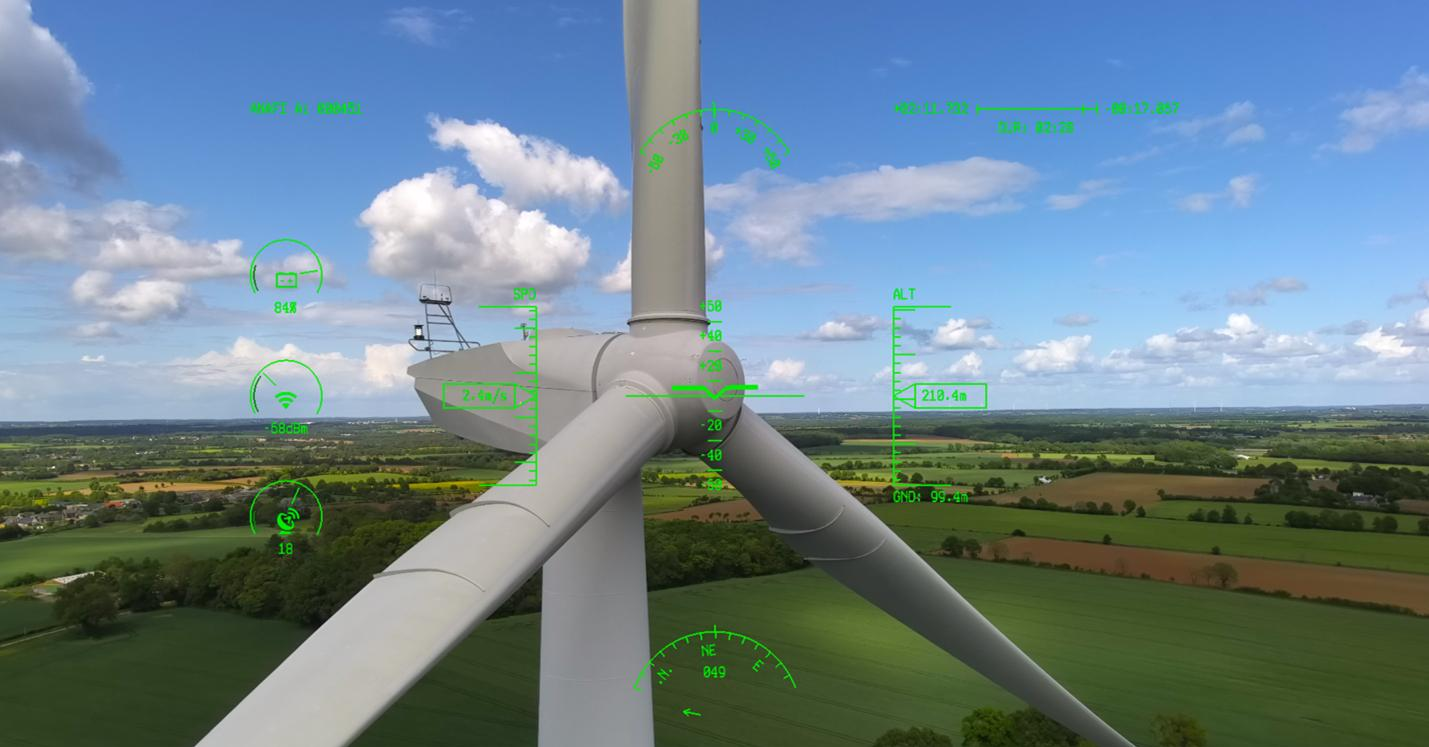
Metadati
I metadati vengono trasmessi con il flusso video. In particolare, contengono elementi di telemetria del drone (posizione, altitudine, velocità, livello della batteria, ecc.) e metriche video (angolo di ripresa, valore di esposizione, campo visivo, ecc.).
La sincronizzazione di immagini e metadati aperti svolge le funzioni di posizionamento preciso sulla mappa, tracciamento degli strumenti di volo nell'HUD o attivazione di elementi di realtà aumentata.
I metadati sono inclusi utilizzando metodi standard (estensione dell'intestazione RTP); il formato dati definito da Parrot è open source: è disponibile nell'ANAFI Ai SDK.
Fotocamera

Sensore da 48 MP
La matrice ANAFI Ai include un gran numero di megapixel per fotografie aeree dettagliate.
Impiega la tecnologia array di filtri colorati di Quad Bayer, in cui gruppi di 4 pixel adiacenti hanno lo stesso colore. Pertanto, l'acquisizione HDR in tempo reale può essere ottenuta sia in modalità foto che video aggiungendo segnali da quattro pixel adiacenti.
La sua gamma dinamica è 4 volte quella delle matrici Bayer standard. Anche scene complesse possono essere filmate con un'evidenziazione minima o una perdita di dettagli in ombra.
Obiettivo
L'obiettivo Ai ANAFI è stato sviluppato appositamente per Parrot. Combina 6 elementi asferici ed è ottimizzato per ridurre il riflesso ottico. Questo obiettivo fornisce 68 ° HFoV in modalità video standard e 64,6 ° HFoV in modalità foto standard.

Modalità video
ANAFI Ai acquisisce video 4K fluidi a 60 fotogrammi al secondo, incluso P-Log e anche HDR10 4K video fino a 30 fps. La tabella seguente elenca tutte le modalità video Ai di ANAFI.

Codifica video
Gli utenti possono scegliere tra H.264 (AVC) e H.265 (HEVC).
Tutte le risoluzioni utilizzano i seguenti formati di pixel:
- YUV420p (spazio colore BT.709 a 8 bpc) per la modalità standard e HDR8.
- YUVJ420p (8 bit/componente, gamma completa - spazio colore BT.709) per lo stile P-log.
- YUV420p10 (spazio colore 10 bpc BT.2020) per registrazione HDR10, solo H.265.
HDR
Quando si registrano video in HDR8 e HDR10, ANAFI Ai copre una gamma dinamica di 14EV. Il formato HDR10 offre una luminosità massima di 1000 nit e una profondità di colore di 10 bit. Fornisce una gamma di miliardi di colori rispetto a 16 milioni per la gamma dinamica standard. Rispetto all'HDR8, l'HDR10 produce immagini più del doppio più luminose con un corrispondente aumento del contrasto. HDR8 può essere visualizzato su qualsiasi schermo standard, mentre HDR10 è per TV e schermi HDR10.
Modalità foto
Descrizione delle modalità
La sezione Controllo modalità contiene le impostazioni che influiscono sul numero di scatti che vengono effettuati ogni volta che l'otturatore viene rilasciato.
Modalità di acquisizione singola
Modalità di acquisizione singola standard. Dopo ogni scatto, l'immagine catturata viene immediatamente elaborata dal sistema.
Modalità Bracketing
Gli utenti possono riprendere una serie di 3, 5 o 7 fotogrammi con esposizioni diverse per ogni fotogramma. Sono disponibili le seguenti preimpostazioni:
- [-1 EV, 0, 1 EV] (impostazioni predefinite)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

Modalità Burst
La modalità Burst consentirà all'utente di scattare una raffica di 10 fotogrammi in 1 secondo.
Modalità Panorama
La modalità Panorama include quattro diversi scatti panoramici:
- Spherical (360 °) è una modalità panoramica include tre opzioni per ripresa di un panorama sferico: Sfera / Piccolo pianeta / Tunnel.
- Orizzontale (180 °)
- Verticale (109 °)
- Superwide - nuovo super modalità di unione a 9 immagini ampia (HFOV 110°, panorama diritto)
Per i dettagli sulle specifiche della modalità panorama, vedere la tabella seguente:

Modalità Timelapse
Questa modalità consente di scattare foto ai seguenti intervalli di tempo fissi:
- 48MP: 1, 2, 4, 10, 30 o 60 secondi.
- 12MP: 0,5, 1, 2, 4, 10, 30 o 60 sec.
Modalità GPS Lapse
Questa modalità foto è stata sviluppata per l'ispezione e la fotogrammetria. Consente di scattare foto ai seguenti intervalli di distanza fissi: 5, 10, 20, 50, 100 o 200 metri.
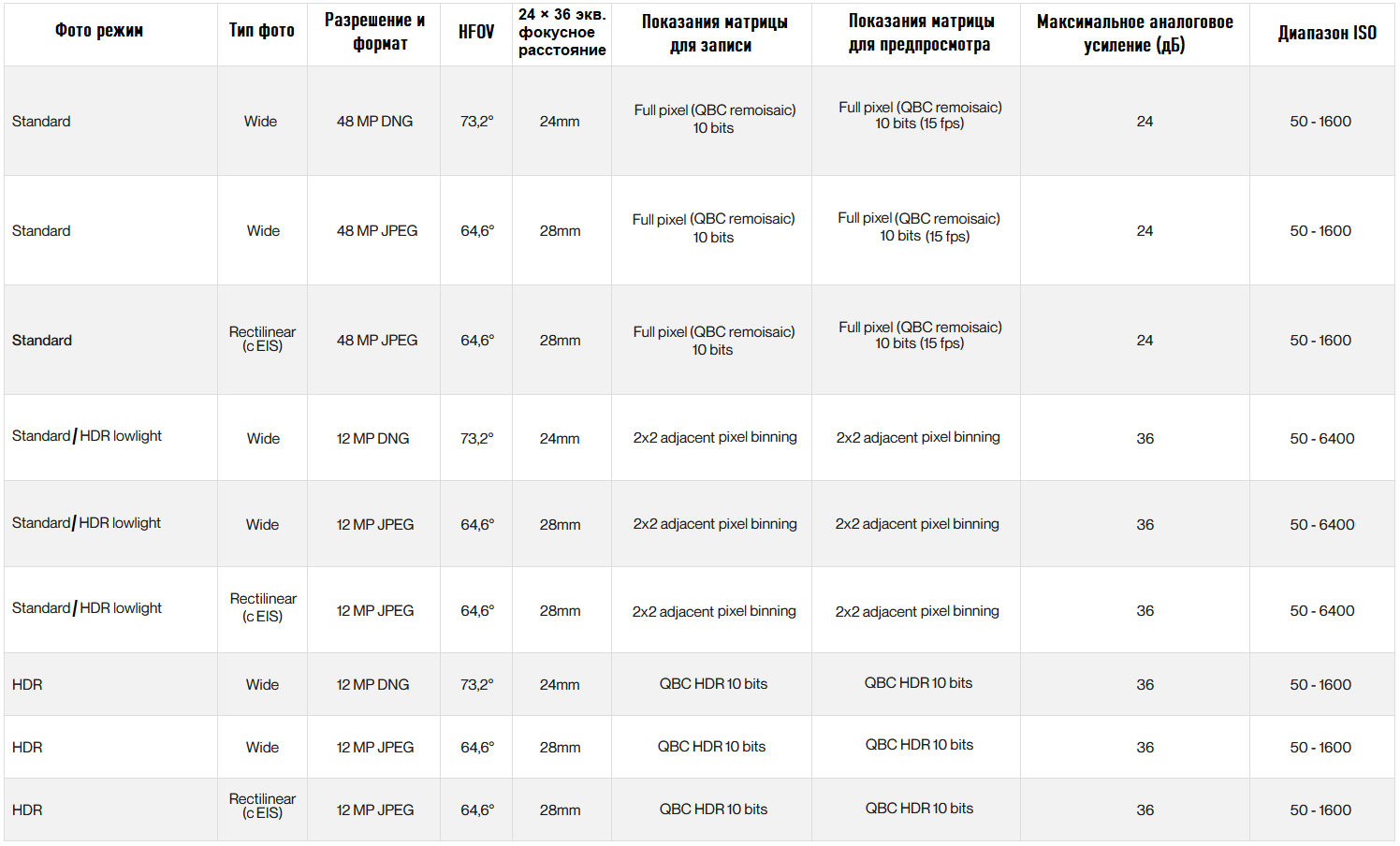
La tabella seguente mostra le modalità e le risoluzioni di acquisizione delle immagini fisse, inclusa la modalità di lettura del sensore:
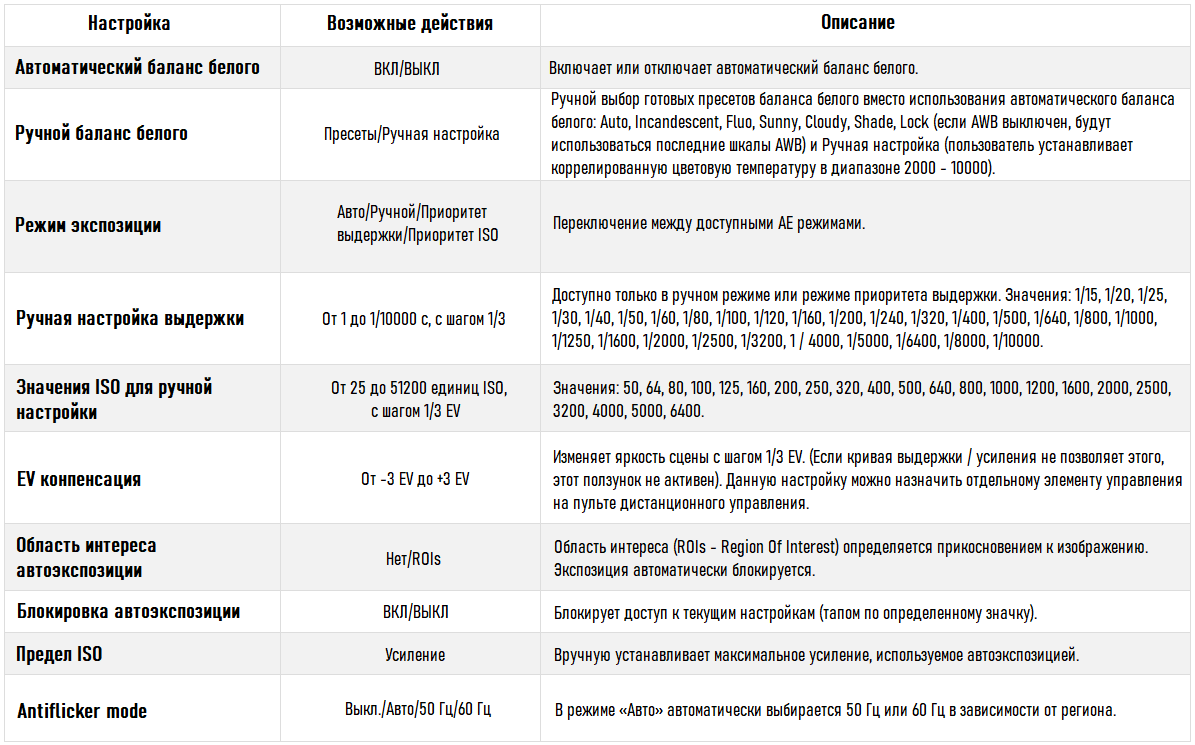
Impostazioni
Di seguito tabella elenca le impostazioni disponibili per ciascuna modalità.
Zoom 6x
Lo zoom è disponibile in tutte le modalità foto e video. In combinazione con un sensore da 48 megapixel, algoritmi di nitidezza precisi producono immagini ad alta definizione anche quando si utilizza lo zoom digitale 6x. Gli utenti di ANAFI Ai ora possono vedere i dettagli di 1 cm da una distanza di 75 m. L'elevato numero di pixel consente inoltre di ritagliare i video 4K a 1080p senza perdita di qualità.

Stabilizzazione ibrida
ANAFI Ai ha la stabilizzazione più accurata sul mercato dei micro UAV.
Combina la stabilizzazione combinata:
- meccanica a 3 assi (3 assi mech. Gimbal)
- Elettronica a 3 assi (EIS)
La stabilizzazione meccanica stabilizza l'asse di puntamento della telecamera indipendentemente dalla posizione di volo del drone. La stabilizzazione elettronica dell'immagine corregge gli effetti di microvibrazione per le frequenze superiori a 100 Hz, che l'azionamento meccanico non è in grado di gestire.
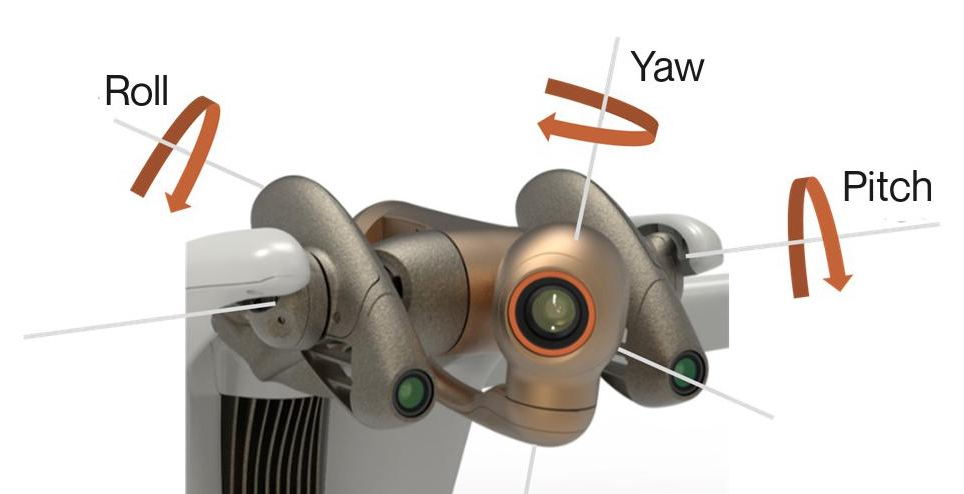
Gimbal fotocamera principale
La stabilizzazione meccanica consente di stabilizzare e orientare l'asse orizzontale della vista della fotocamera in tutti e 3 gli assi.
 3 assi di rotazione mecc. sospensione della fotocamera principale ANAFI Ai.
3 assi di rotazione mecc. sospensione della fotocamera principale ANAFI Ai.
Caratteristiche principali
- Gimbal meccanico a 3 assi per telecamera principale
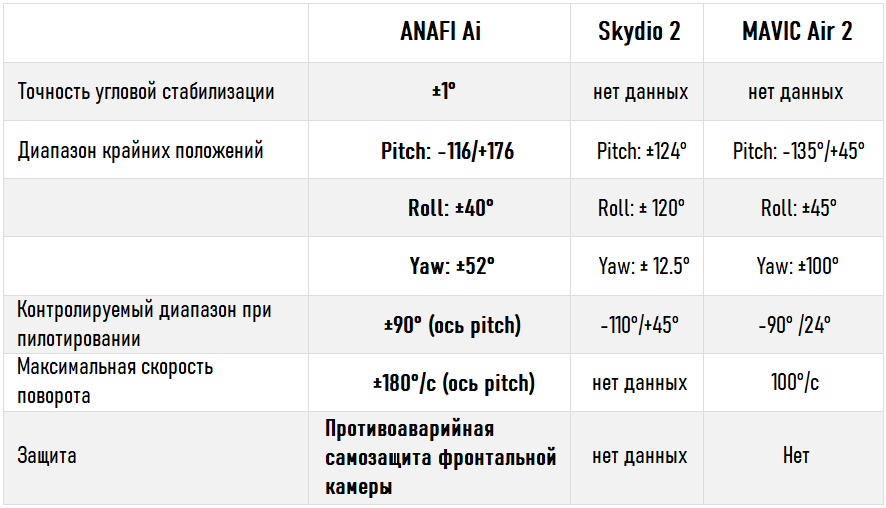
- Offset verticale 292 °, campo visivo da -116 ° a 176 °
Gimbal Performance
- L'algoritmo EIS corregge gli effetti di oscillazione e distorsione dell'obiettivo grandangolare ed esegue anche un'immagine digitale a 3 assi stabilizzazione (rollio, beccheggio e imbardata).
- Il metodo consiste nell'applicare una trasformazione geometrica dell'immagine. La trasformazione geometrica è associata alla marca temporale e alla posizione esatta grazie all'IMU.
- La trasformazione geometrica viene applicata a ciascuna immagine in base alla distorsione ottica, alle vibrazioni e ai movimenti dell'unità fotocamera misurata.
Intervallo di rotazione 292°
La telecamera ha un intervallo di rotazione orizzontale di -116°/176° attorno all'asse del pitch, fornendo così un'osservazione sopra e sotto il drone, che è un opportunità unica sul mercato micro-UAV.
![]()
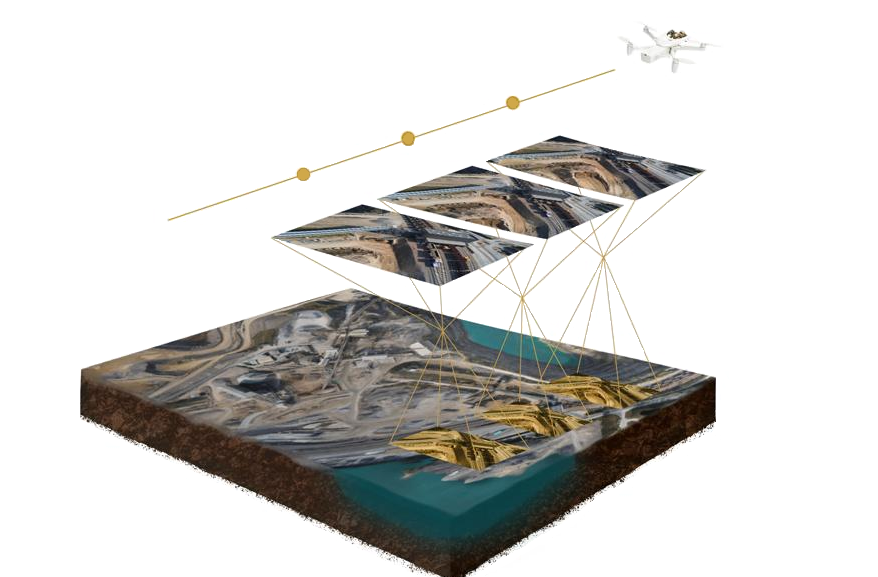
Fotogrammetria
La fotografia aerea con veicoli aerei senza equipaggio sta cambiando il modo in cui gli specialisti conducono ispezioni e rilievi. I metodi di fotogrammetria vengono utilizzati per elaborare le immagini raccolte dagli UAV per creare modelli 2D e 3D, che in seguito consentono ai clienti di programmare la manutenzione degli oggetti rilevati in modo tempestivo.
Il 4G fornisce un'affidabilità senza precedenti del collegamento dati del drone. Gli utenti possono utilizzare gli UAV su vaste aree, vicino a strutture metalliche, edifici, senza timore di perdita di comunicazione.
Ispezione e mappatura
Combinando l'IA del drone ANAFI Ai con la piattaforma online PIX4Dinspect, gli utenti saranno in grado di condurre ispezioni in modo più rapido ed efficiente che mai. o. Gli algoritmi di apprendimento automatico riconoscono le antenne sulle torri cellulari, ne determinano le dimensioni, l'altezza, l'inclinazione, l'azimut e la verticalità.
Clicca sulle immagini sottostanti per visualizzare i modelli demo 3D generati da ANAFI Ai.
Esempio # 1

Esempio # 2
Matrice migliore della categoria
La fotocamera del drone ANAFI Ai è dotata di un sensore CMOS da 48 MP da 1/2 pollice costruito utilizzando la tecnologia del filtro colore Quad Bayer, che è più che mai adatto per l'ispezione e la fotogrammetria. La matrice utilizzata consente di ottenere immagini dettagliate con un'ampia gamma dinamica.
Foto ad alta risoluzione
ANAFI Ai è in grado di generare immagini fisse da 48 megapixel, catturando così tutti i dettagli in alta risoluzione e creando una nuvola di punti ad alta densità.
Significativa nitidezza
Le missioni di ispezione richiedono la capacità di identificare dettagli minuti come numeri di serie, connettori, macchie di ruggine e crepe incipienti.
Ampia gamma dinamica
10 stop di gamma dinamica in modalità standard, 14 stop in modalità HDR. La gradazione ottimale dell'immagine è essenziale per creare punti nuvola coerenti e ricostruzioni 2D o 3D di alta qualità.
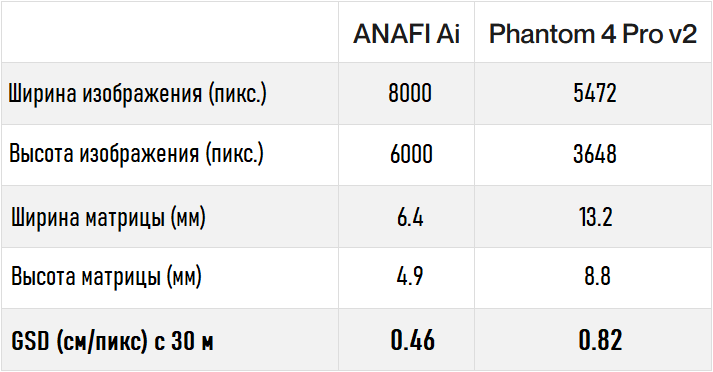
55% di dettagli in più rispetto ai sensori da 1 pollice
Il sensore Quad Bayer da 48 MP da 1/2 pollice del drone ANAFI Ai è più nitido dei sensori da 20 MP da 1 pollice utilizzati in una serie di droni professionali moderni. Le seguenti immagini dell'ispezione del tetto di ANAFI Ai e DJI Phantom 4 Pro V2.0 alla stessa altezza dimostrano chiaramente questo fatto.

Ideale per le ispezioni
Il gimbal ANAFI Ai include un sistema di stabilizzazione ibrido (meccanico elettronico) a 6 assi che compensa le fluttuazioni del volo e garantisce la nitidezza dell'immagine. La fotocamera ANAFI Ai ha una gamma regolabile da -90 ° a 90 °, che la rende uno strumento aereo ideale per visualizzare la parte inferiore di una base a ponte.
Inclinazione controllabile ± 90 °
Precisione
ANAFI Ai consente agli utenti di ottenere un GSD di 0,46 cm / px da un'altezza di 30 m, il che significa planimetria di precisione relativa fino a 0,92 cm
Per confronto, alla stessa altezza il DJI Phantom 4 Pro V2 fornisce un GSD di soli 0,82 cm / px. In altre parole, ANAFI Ai può mappare lo stesso bersaglio, volando più di 1,5 volte più in alto del Phantom, con un livello di dettaglio equivalente.
Funzionalità AI e 4G
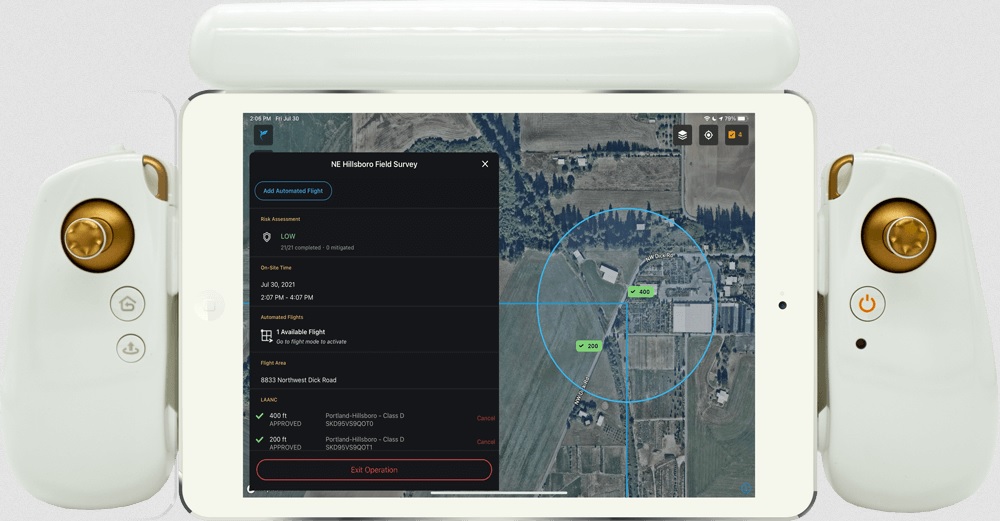
Un'app. Qualsiasi piano di volo
Il potenziale dell'app mobile FreeFlight 7 consente all'utente di avviare tutte le missioni di rilievo, ispezione e fotogrammetria.

Modalità di volo fotogrammetriche disponibili
Le seguenti modalità di volo fotogrammetriche sono ora disponibili nell'applicazione mobile FreeFlight 7:
- Griglia
- Doppia griglia
- Circolare
Crea un piano di volo con un solo tocco
Un tocco sulla mappa interattiva FreeFlight 3D è tutto ciò di cui hai bisogno per la costruzione rapida della scansione. L'intelligenza artificiale determina automaticamente i parametri di volo e la traiettoria ottimali. Le immagini da 48 MP con georeferenziazione accurata dei sensori ANAFI Ai (IMU, GNSS e Flight Time) consentono una ricostruzione 3D accurata.
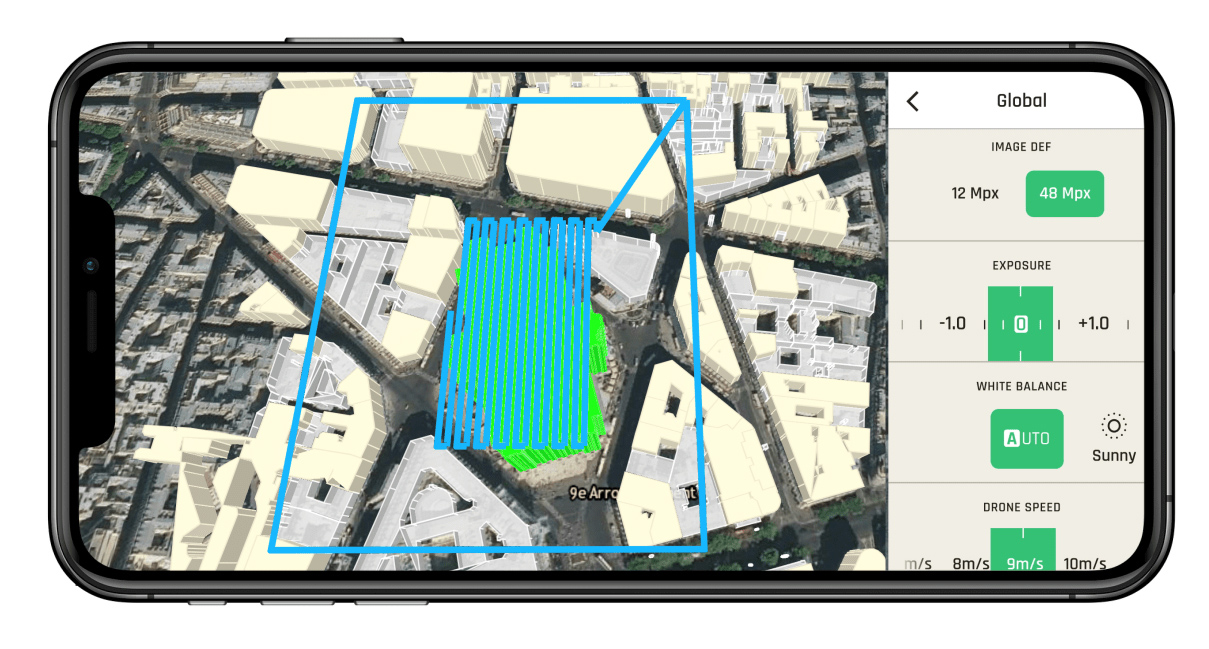 Piano di volo automatico creato con un solo tocco nel catasto 3D.
Piano di volo automatico creato con un solo tocco nel catasto 3D.
- Lo sfondo cartografico di FreeFlight 7 proviene dal software ArcGIS. La rappresentazione 3D dell'edificio si basa sui dati OpenStreetMap che coprono le città di tutto il mondo.
- I sistemi di visualizzazione garantiscono la sicurezza di un determinato piano di volo: gli utenti non devono preoccuparsi degli ostacoli. ANAFI Ai li evita autonomamente.
Volo autonomo
Il sistema di sensori omnidirezionali ANAFI Ai, basato sulla visione stereoscopica, si orienta automaticamente nella direzione di marcia.

Il drone rileva ostacoli a 30 metri di distanza. La tecnologia AI costruisce e aggiorna costantemente la griglia di riempimento durante l'esecuzione di un determinato piano di volo. Rappresenta l'ambiente del drone in voxel.
Gli algoritmi determinano la traiettoria migliore per evitare di scontrarsi con ostacoli, mentre il drone rimane concentrato sul suo obiettivo: la missione di volo assegnata.

Connessione 4G
ANAFI Ai è il primo microdron commerciale dotato di modulo 4G. Copre oltre il 98% delle frequenze utilizzate nel mondo.

Rilievo di linee elettriche ad alta tensione. Girato con ANAFI Ai, montato con Pix4Dmatic. Dimensioni della scena: 4060 × 60 × 70 M. Numero di immagini: 2172. GSD: 1,3 cm / pix. Altezza: 90 M. Sovrapposizione fronte/laterale: 90%/65%.
Il drone è in grado di passare senza soluzione di continuità dal Wi-Fi al 4G e viceversa, fornendo così la connessione più affidabile, che a sua volta garantisce:
- La capacità di eseguire voli BVLOS
- Connessione stabile anche quando si vola in ambienti con ostacoli ed edifici
- Volo sicuro in ambienti ad alto rumore
- Qualità del collegamento video 1080p @ 30 fps
- Caricamento diretto di immagini su server cloud

Ottimizzazione del tempo di volo
Secondo lo sviluppatore, è stato ottenuto un notevole risparmio di tempo grazie all'elevata prestazioni dell'immagine ANAFI Ai:
- 48MP consente al drone di volare più di 1,5 volte più in alto dei droni con sensori da 1 pollice da 20MP, pur ottenendo lo stesso GSD. In altre parole, altitudine più alta e missione più veloce vanno di pari passo.
- Fotografia a 1 fps: ANAFI Ai scatta due volte più velocemente di Autel EVO 2 e DJI Phantom 4 Pro V2.0.
Trasferimento in volo 4G su PIX4Dcloud
Nel processo di creazione di un modello digitale da fotografie aeree di un drone, trasferimento di file ed elaborazione le foto sono due compiti che richiedono tempo. ANAFI Ai aiuta gli utenti ad accelerare il proprio flusso di lavoro. In particolare, il sistema drone consente:
- Trasferire immagini a server protetti direttamente in volo utilizzando la connessione 4G del drone.
- Inizia subito a calcolare gli oggetti alla fine del volo: ortomosaici, nuvola di punti, modelli di elevazione e mesh testurizzata.
- Condividi facilmente mappe 2D e modelli 3D di qualità del rilievo con dipendenti e clienti.
![]()
Compatibilità con PIX4D Suite
ANAFI Ai è ora completamente compatibile con una suite unica di applicazioni di fotogrammetria mobile, desktop e cloud composta da:
Fotogrammetria o lidar
Perché scegliere la fotogrammetria per rilievi e ispezioni? Oltre all'accessibilità e alla facilità d'uso, la fotogrammetria aerea è la scelta migliore quando è richiesta l'interpretazione visiva dei dati.
Pro fotogrammetria
- Fornisce visualizzazioni multiple: ortomosaico, nuvola di punti colorati, mesh strutturata.
- Crea una nuvola di punti con una densità maggiore, ognuno dei quali contiene una quantità significativa di informazioni (altezza, consistenza, colore).
- Supera il LIDAR nell'accuratezza dei rendering fotorealistici 2D e 3D - LIDAR non fornisce un alto livello di dettaglio contestuale.
LIDAR contro
- Costa 100 volte di più di un UAV con una matrice RGB.
- La complessità dell'elaborazione dei dati ei possibili errori di interpretazione.
- L'aggiunta di informazioni sul colore è possibile, ma complica il processo.
- LIDAR genera solo nuvole di punti ed è destinato a casi e situazioni specifici.
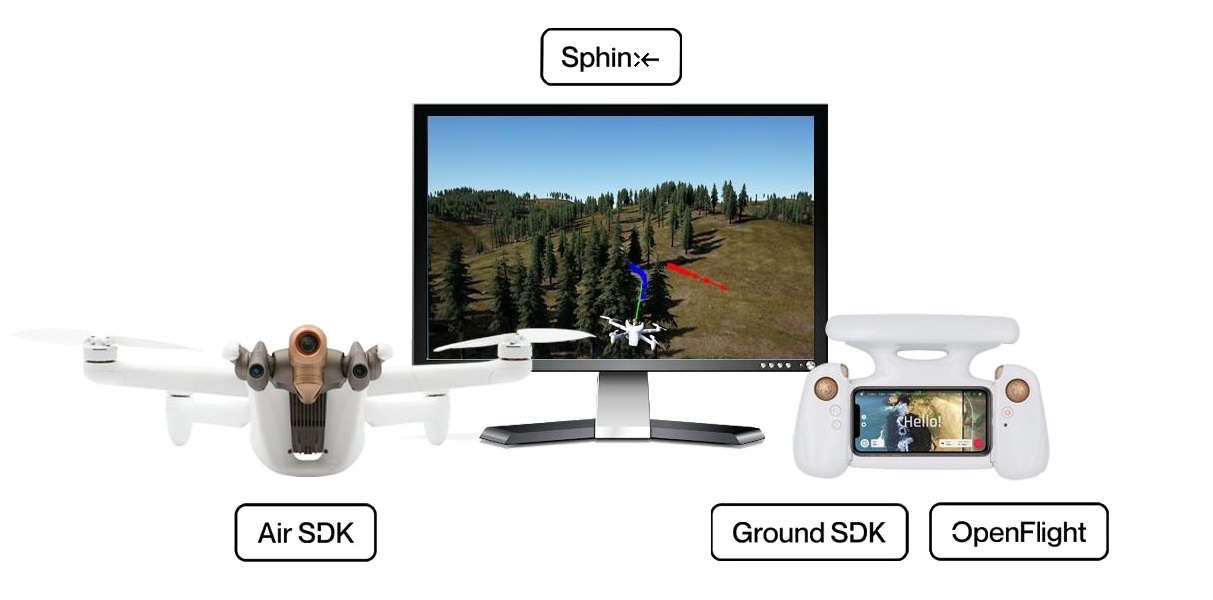
SDK
Il Parrot Software Development Kit è un set open source di strumenti e software per sviluppatori. Dalla creazione del primo drone A. R. Drone, il software open source dell'azienda è alla base delle piattaforme e degli strumenti per sviluppatori, e Parrot
Lo sviluppatore chiarisce che tutte le risorse SDK dell'azienda sono disponibili gratuitamente, senza registrazione e tracciamento, sul portale " Parrot Portale per sviluppatori"... Puoi anche unirti alle migliaia di sviluppatori sul forum Parrot dove puoi discutere di argomenti attuali direttamente con gli ingegneri dell'azienda.
Air SDK
Esegui il tuo codice su ANAFI Ai
Air SDK fornisce un'architettura tecnologica rivoluzionaria per scaricare ed eseguire il codice direttamente all'ANAFI Ai. Gli sviluppatori possono programmare missioni di volo personalizzate con accesso a tutti i sensori dei droni, interfacce di connessione e funzioni di pilota automatico.
Air SDK fornisce l'accesso a bordo a:
- Tutti i sensori (IMU, GPS, TOF) e le modalità di volo
- Flusso video e metadati con tutte le telecamere
- Interfacce di comunicazione Wi-Fi, 4G, USB
- Mappe di profondità e griglie di riempimento
- Creazione di traiettorie per evitare ostacoli
Qualsiasi sviluppatore può:
- Modificare lo stato del drone creando missioni di volo
- Modificare la modalità di navigazione
- Aggiungere processi Linux incorporati (per esempio, trasferire i dati su un canale 4G o utilizzare la visione artificiale)
L'Air SDK supporta il linguaggio di programmazione C o Python. Air SDK viene fornito con una guida di installazione dettagliata e documentazione API. Molti esempi applicativi illustrano tutte le possibilità offerte dalla sua architettura unica.
Ground SDK
Crea una potente app mobile
Ground SDK è una piattaforma software Ground Control Station (GCS) per dispositivi mobili (sono supportati sia iOS che Android). Consente a qualsiasi sviluppatore di creare un'applicazione mobile per ANAFI Ai per il successivo controllo del drone direttamente da un dispositivo mobile. Tutte le funzioni BVS (controllo, video, impostazioni) sono disponibili tramite un'API facile da usare e completamente documentata.
OpenFlight
Stazione di controllo a terra Open Source
Per la prima volta, Parrot apre il codice sorgente per l'applicazione della sua stazione di controllo a terra. OpenFlight è il cuore della nostra famosa app FreeFlight 7 open source. Ciò consente allo sviluppatore di concentrarsi sull'aggiunta delle proprie funzionalità e di avere immediatamente un'app dall'aspetto professionale pronta per la pubblicazione nell'AppStore.

OpenFlight contiene:
- Tutti gli UX FreeFlight 7
- Tutte le impostazioni dell'interfaccia
- Codice per la visualizzazione 3D in tempo reale degli ostacoli
- Codice per la gestione delle comunicazioni 4G
- OpenFlight è pubblicato con una licenza BSD-3 con una guida all'installazione completa e una documentazione completa.
Sphinx
Simulazione fotorealistica 3D
Parrot Sphinx è uno strumento avanzato di simulazione di droni. Gli ingegneri Parrot lo utilizzano per sviluppare e testare tutte le funzionalità di ANAFI Ai. Il concetto generale è quello di simulare l'effettivo firmware del drone con tutti i suoi sensori in un ambiente visivamente e fisicamente realistico.

Parrot Sphinx consente:
- Simula tutte le fotocamere e i sensori
- Simula mappe di profondità e segmentazione immagini
- Naviga in molte scene 3D realistiche
- Connetti a diversi tipi di telecomandi
- Usa script per controllare la simulazione
- Aggiungi pedoni e veicoli
- Visualizza e registra i dati di volo
- Regola i sensori del velivolo e gli elementi fisici circostanti
- Controlla il fattore in tempo reale
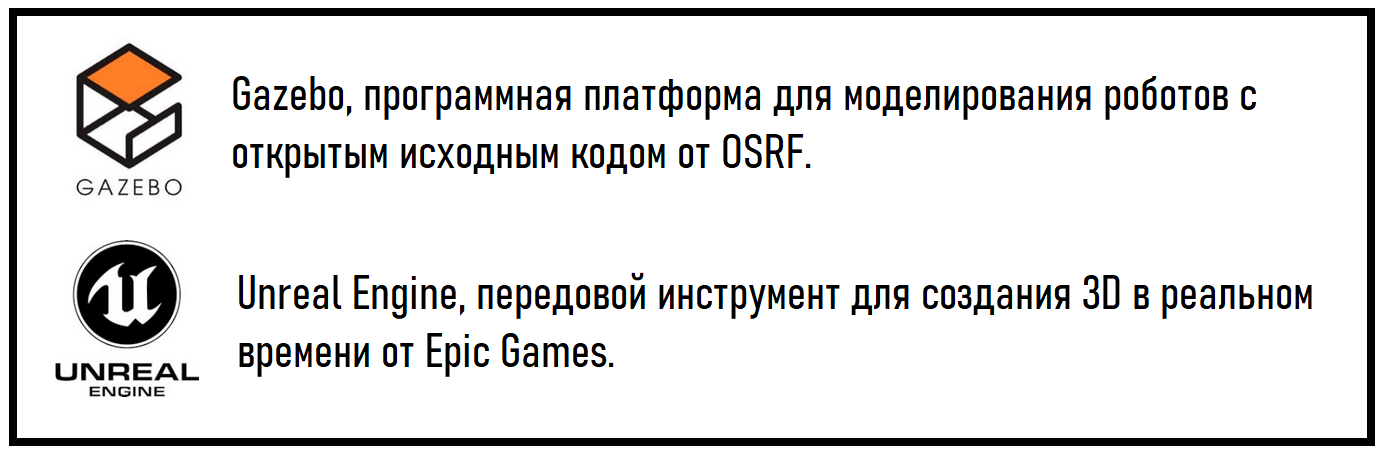
Parrot Sphinx è costruito sulla base di standard avanzati componenti:
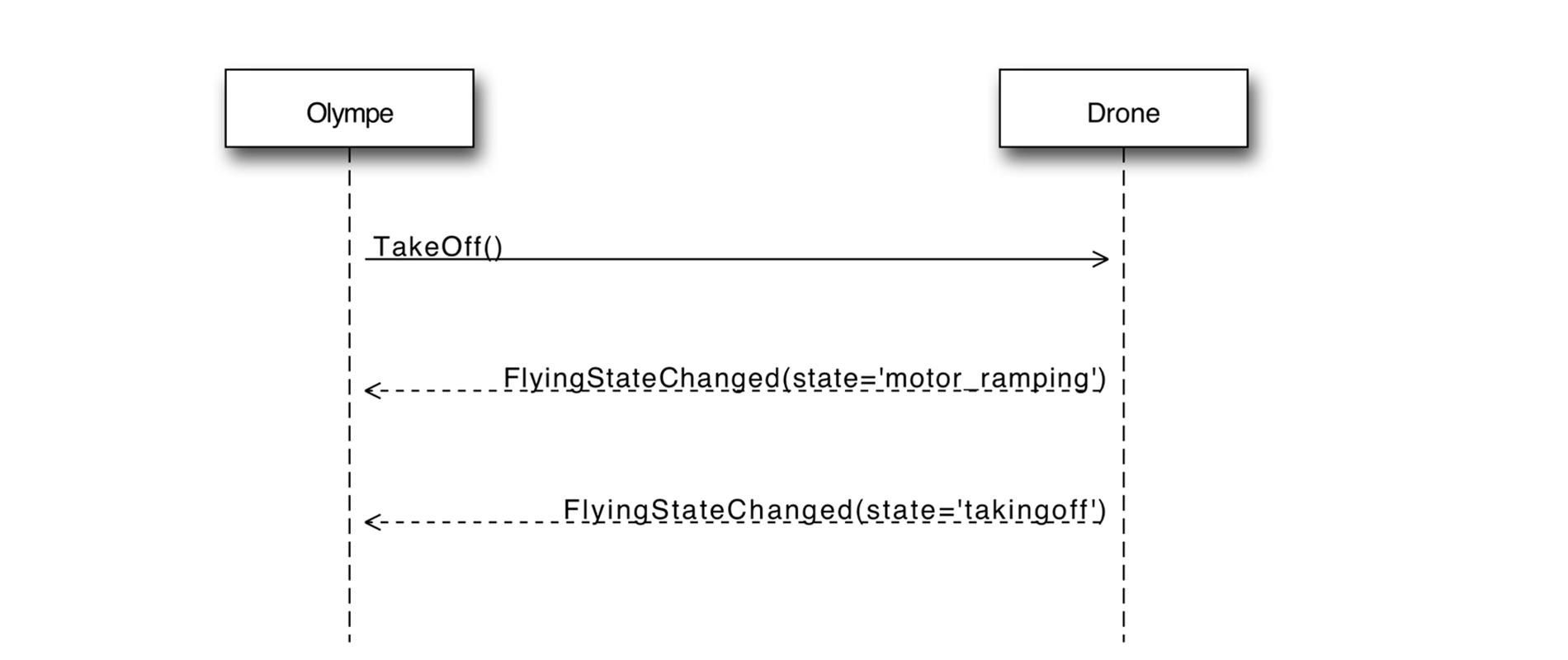
Olympe
Python per controllare ANAFI Ai
Olympe fornisce un'interfaccia di programmazione del controller Python per ANAFI Ai. Lo scopo originale di Olympe era interagire con l'ambiente di modellazione Sphinx. Olympe può anche controllare un ANAFI Ai fisico da un computer remoto.
Il framework Olympe consente:
- Connettersi ad ANAFI Ai simulato o fisico
- Inviare messaggi di comando (pilotaggio, orientamento della telecamera, ritorno a casa, Piano di volo)
- Avvia e interrompe lo streaming video da tutte le telecamere
- Registra flusso video e metadati sincronizzati
PdrAW
Advanced Media Player
PDrAW è un visualizzatore video avanzato per supporti ANAFI Ai. Il visualizzatore supporta sia lo streaming (RTP/RTSP) che i video registrati (MP4) su piattaforme Linux, macOS, Android e iOS. PDrAW si presenta come una libreria (libpdraw), una libreria wrapper (libpdraw-backend) e un eseguibile autonomo (pdraw).
PDrAW gestisce anche i metadati video. Su ANAFI Ai, sia lo streaming che il video registrato includono metadati che sono pubblicamente disponibili e documentati, consentendo l'elaborazione avanzata dei video aerei.
Modelli C. A. D.
Parrot fornisce modelli 3D dei propri droni per l'integrazione nella progettazione CAD per la prototipazione rapida e l'integrazione degli accessori.
Compatibilità MAVLink e GUTMA
ANAFI Ai è compatibile con il protocollo standard open source MAVLink v1, che consente lo scambio di dati in tempo reale tra l'UAV e la stazione di controllo. ANAFI Ai può essere controllato manualmente o utilizzando la pianificazione automatica del volo da una stazione base compatibile con MAVLink come QGroundControl.
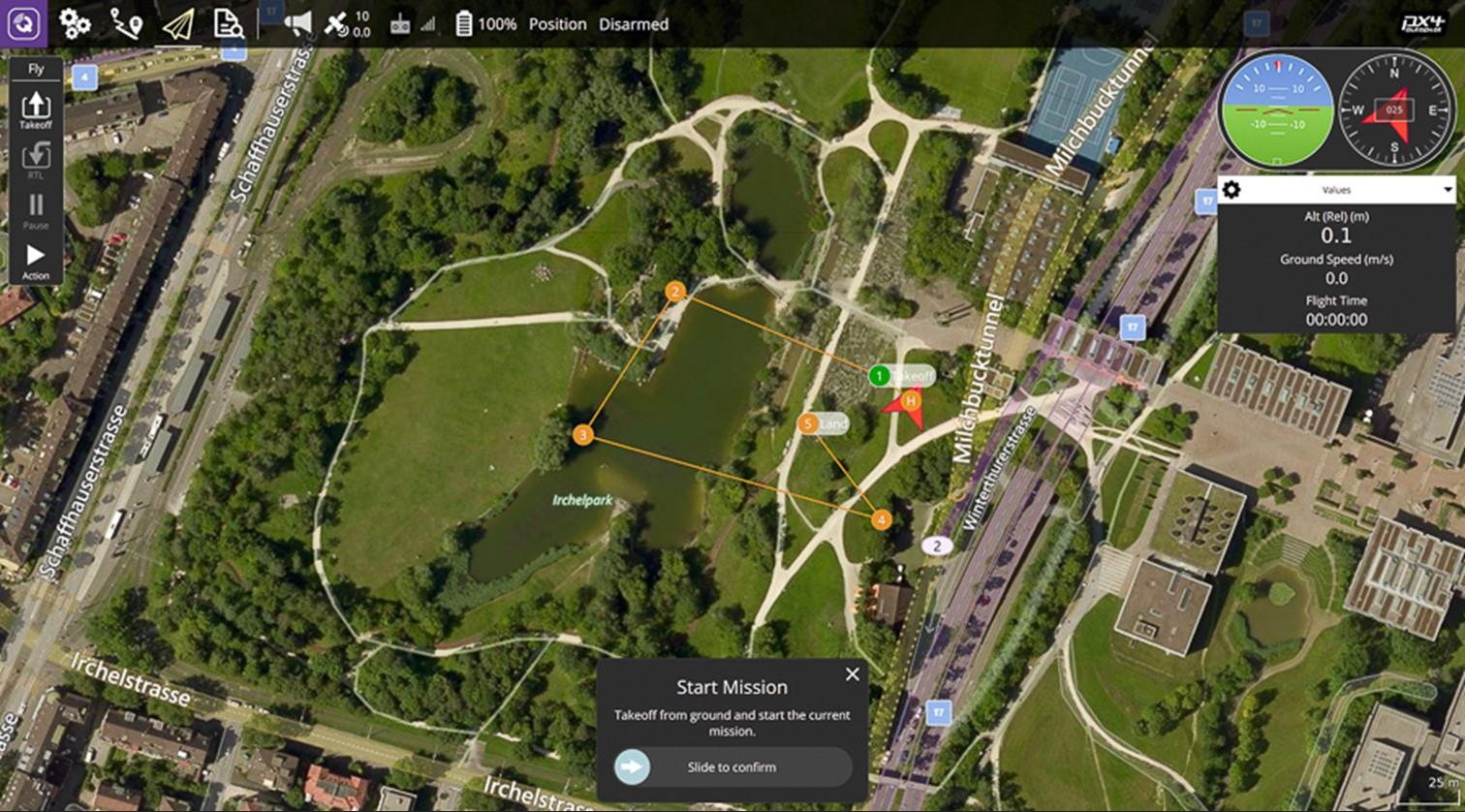
* Interfaccia QGroundControl
ANAFI Ai è compatibile con il protocollo dati di volo standard GUTMA open source. La Global UTM Association è un consorzio di importanti attori nel campo del controllo del traffico aereo.

Il più grande ecosistema partner per droni Parrot
Parrot continua ad espandere l'ecosistema globale di fornitori di software per droni attraverso il suo programma partner SDK.offrire soluzioni specializzate e uniche per le esigenze crescenti e in continua evoluzione degli utenti professionali.
Parrot per ogni esigenza aziendale
Per ottenere il massimo dal processo di ispezione, Parrot offre ai suoi clienti un ecosistema di software per droni compatibili che vanno dalla gestione della flotta, alla compilazione del volo pianificare e importare i log di volo, prima dello scatto, mappare, monitorare e analizzare i dati ricevuti.
PIX4D × Parrot
Applicazioni di modellazione 2D / 3D. Un set unico di applicazioni di fotogrammetria mobile, desktop e cloud.
Verizon x Skyward x Parrot
Soluzione drone 4G LTE negli Stati Uniti. Il primo drone robotico ANAFI Ai nel suo genere connesso alla rete Verizon 4G LTE con software Skyward preinstallato. Apre le porte a trasferimenti di dati quasi in tempo reale, implementazioni remote e voli fuori dal campo visivo.

Skyward × Parrot
Integrazione e apprendimento all'interno della capacità di ANAFI. Piattaforma di gestione dell'aviazione che include spazio aereo, accesso LAANC e formazione, attrezzature e connettività per l'implementazione di flotte di droni aziendali.

DroneSense × Parrot
Costruisci, gestisci e scala i tuoi programmi di droni. I professionisti dei veicoli aerei senza equipaggio nel settore della sicurezza pubblica possono utilizzare la suite completa di funzionalità di DroneSense, appositamente progettate per le esigenze dei primi soccorritori.

Parrot Ecosystem Partners

Programma di affiliazione Parrot
Lo sviluppatore offre di espandere le capacità di il suo programma per droni integrando il loro SDK.
Cybersecurity
Riservatezza dei dati
Lo sviluppatore nota che non raccoglie qualsiasi dato senza il consenso degli utenti. La decisione se trasferire o meno i dati all'infrastruttura Parrot spetta esclusivamente agli utenti stessi. I dati ospitati in Parrot consentono all'utente di sincronizzare i dati di volo e i piani di volo tra diversi dispositivi, oltre a facilitare il supporto e consentire a Parrot di migliorare i propri prodotti.
ANAFI Ai è conforme al Regolamento generale sulla protezione dei dati dell'Unione Europea (GDPR) e va oltre, ad esempio, consente di eliminare tutti i dati in 1 clic, fornendo così agli utenti il controllo più semplice. Questo problema con un clic viene risolto nell'applicazione mobile FreeFlight7 o nelle impostazioni sulla privacy dell'account Parrot. Cloud. Pertanto, gli utenti in qualsiasi momento possono non solo interrompere lo scambio di dati, ma anche richiederne facilmente la cancellazione.
Se l'utente acconsente allo scambio di dati, il loro trattamento sarà effettuato in un formato completamente trasparente, descritto in dettaglio nell'Informativa sulla privacy di Parrot.
Quando ANAFI Ai è connesso a Skycontroller 4 tramite 4G, l'infrastruttura Parrot viene utilizzata per accoppiare il drone e il telecomando. Se l'utente non ha effettuato l'accesso a un account Parrot. Cloud, può comunque utilizzare una connessione 4G con un account temporaneo univoco. Quando si utilizza l'infrastruttura di Parrot per l'accoppiamento 4G, il video viene crittografato utilizzando una chiave concordata tra il drone e il telecomando, Parrot non ha accesso al video non crittografato.

Conforme a FIPS140-2 e CC EAL5 Secure Element
ANAFI Ai ha un elemento di sicurezza Wisekey integrato conforme a NIST Certificazione FIPS140-2 Livello 3 e Common Criteria EAL5. Un elemento di sicurezza simile è integrato anche nell'hardware di controllo di Skycontroller 4.
Funzioni dell'elemento di sicurezza:
- Esegue operazioni crittografiche
- Memorizza e protegge le informazioni riservate
Utilizza una chiave privata ECDSA con parametri di dominio P521, univoco per ogni drone. Non può essere estratto dall'elemento di sicurezza. E il certificato associato a questa chiave è firmato da un'autorità di certificazione.
Wisekey protegge l'integrità del firmware, fornisce l'identificazione univoca del drone per l'accoppiamento 4G e l'autenticazione forte e la firma digitale univoca delle foto scattate dal drone.

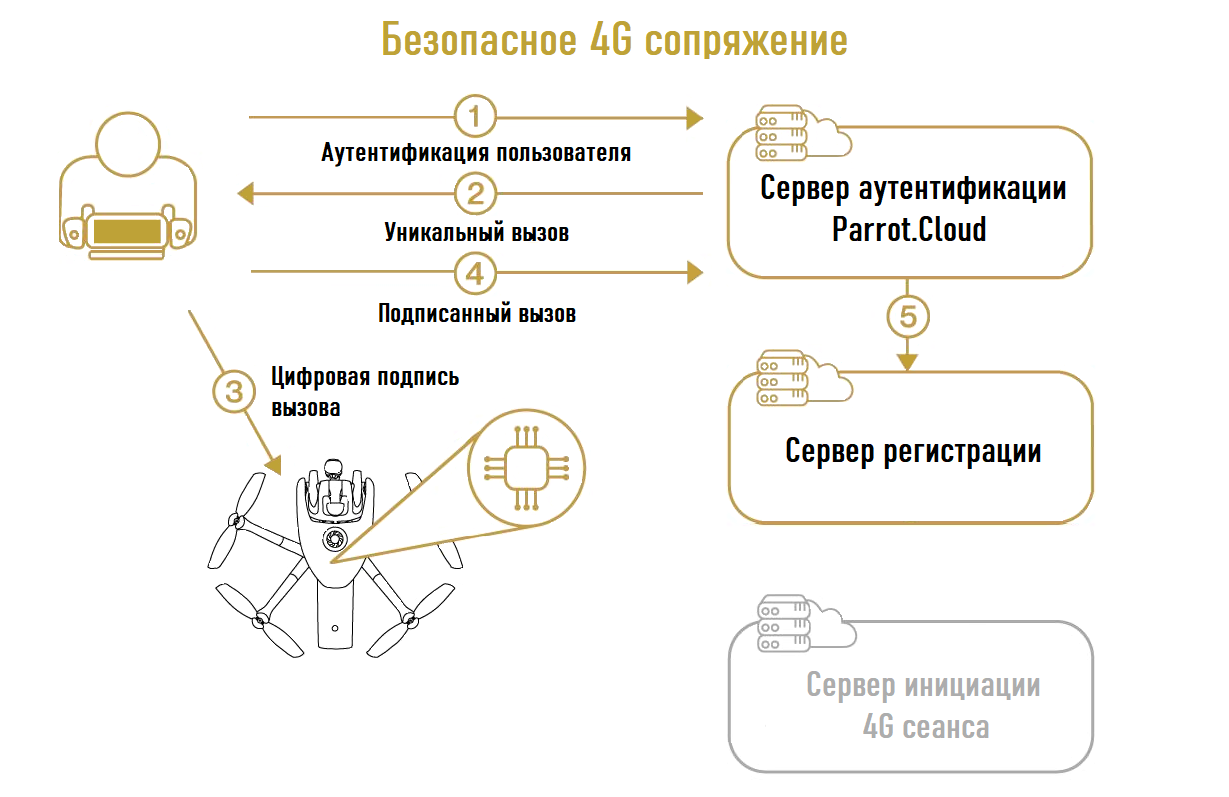
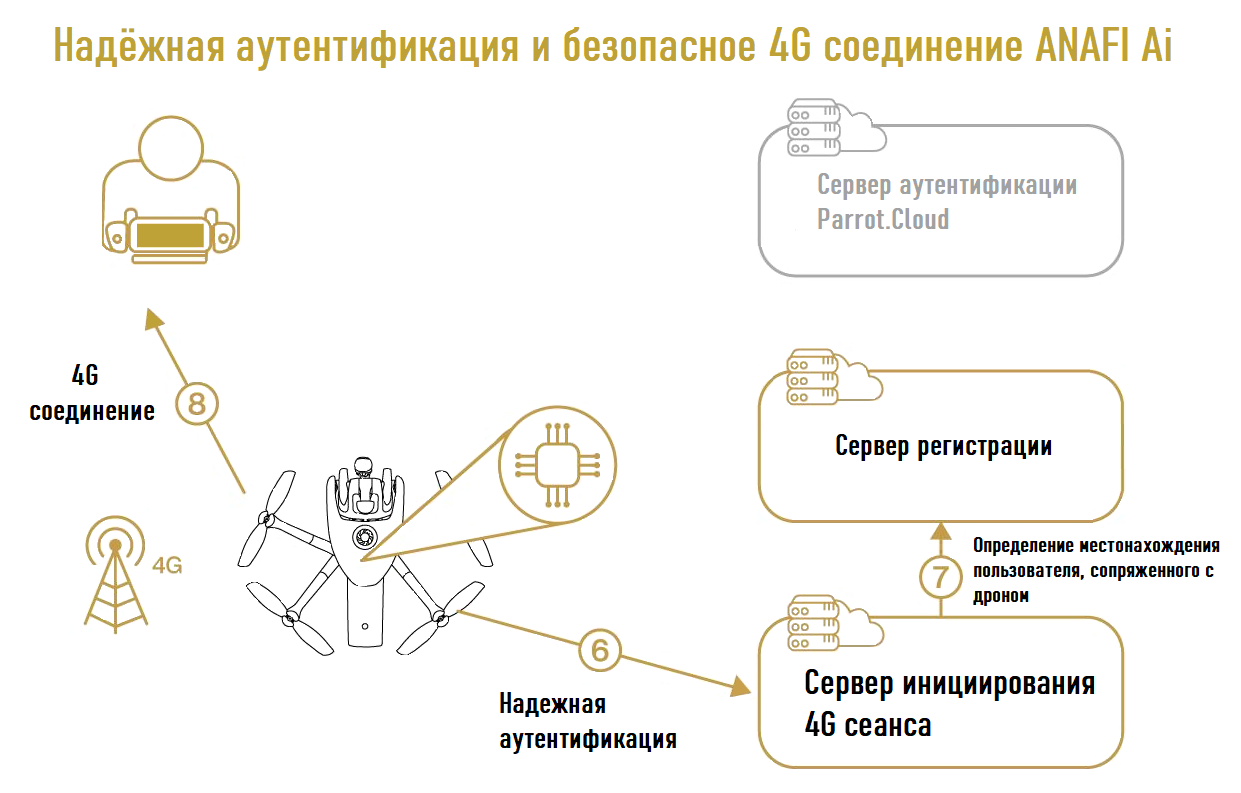
Connessione sicura 4G e autenticazione forte
il processo di associazione sicura dei dispositivi. Durante questo processo, l'utente conferma in modo affidabile di essere connesso a un drone specifico. Grazie ad ANAFI Ai Secure Element, può farlo senza inserire una password all'interno del drone.
I server Parrot registrano quindi la comunicazione tra l'utente e il drone. Quando la connessione Wi-Fi tra l'utente e il drone viene persa, ANAFI Ai passerà automaticamente alla connessione 4G. ANAFI Ai esegue l'autenticazione forte sui server Parrot utilizzando la sua chiave privata memorizzata su Secure Element. I server Parrot cercano utenti connessi e forniscono l'interfaccia tra ANAFI Ai e Skycontroller 4.
Per proteggere il controllo dei droni e i flussi video in arrivo su Skycontroller 4, ANAFI Ai supporta i protocolli TLS, DTLS e SRTP.
Inizializzazione e aggiornamento sicuri
La sequenza di avvio del velivolo è protetta: il sistema controlla che utilizza il software Parrot e che questo software non è stato manomesso. Un controllo di sicurezza viene eseguito ad ogni inizializzazione. Il servizio di aggiornamento controlla anche la firma digitale degli aggiornamenti software.
Configurazione delle chiavi utente su Secure Element
Gli utenti ANAFI Ai hanno accesso a un account operatore speciale Secure Element. Questo account viene utilizzato per impostare chiavi rilevanti per questo utente. Gli utenti possono configurare Secure Element con le chiavi pubbliche dei provider di missione di cui si fidano. ANAFI Ai eseguirà solo missioni firmate con queste chiavi. Questo processo impedisce agli aggressori di eseguire missioni di volo dannose sul drone.
Foto firmate digitalmente
Secure Element di ANAFI Ai può firmare digitalmente le immagini dei droni. Questa firma è la prova che:
- Detta immagine firmata è stata scattata dal veicolo aereo senza equipaggio indicato.
- Né l'immagine stessa né i suoi metadati sono stati elaborati (volontariamente o meno) - i metadati, noti anche come EXIF e XMP, contengono informazioni sulla data, l'ora e la posizione dell'immagine.

In altre parole, la firma digitale protegge tutti i dati relativi all'immagine, compreso il luogo e l'ora in cui è stata catturata e quale drone ANAFI Ai.
Gli utenti e i partner che offrono soluzioni software che utilizzano la fotografia con drone possono verificare la firma digitale delle foto ANAFI Ai con il certificato del drone o tramite il catalogo di chiavi pubbliche fornito da Parrot.
Trasparenza e controlli di sicurezza continui con Bug bounty
Parrot utilizza protocolli e formati di file standard quando possibile. Non ci sono codici offuscati o funzionalità nascoste. Ciò consente all'utente di comprendere come funzionano i prodotti Parrot e di testarne la sicurezza. Inoltre, OpenFlight, il software utilizzato per controllare il drone, è open source, offrendo agli utenti il controllo completo.
Nell'aprile 2021, Parrot ha lanciato il programma Bug Bounty con YesWeHack, la prima piattaforma di sicurezza crowdsourcing in Europa. Attraverso questa partnership, Parrot sfrutta la vasta comunità di ricerca sulla sicurezza informatica di YesWeHack per identificare potenziali vulnerabilità nei suoi droni, app mobili e servizi web.
Il programma Bug Bounty consiste in due fasi:
I programmi privati inizialmente forniscono l'accesso esclusivo a selezionati ricercatori della sicurezza e includono futuri modelli di droni Parrot. L'esperienza e le diverse competenze dei ricercatori confermeranno l'elevato livello di sicurezza dei prodotti prima che vengano immessi sul mercato, il che contribuirà a migliorare la sicurezza degli utenti Parrot e la protezione dei loro dati.
Dopo questo primo round del programma privato Bug Bounty e dopo la commercializzazione, i prodotti entrano nel programma pubblico. La loro sicurezza viene quindi rigorosamente controllata dall'intera comunità YesWeHack di oltre 22.000 ricercatori di sicurezza informatica.

Gestione dati
Parrot Cloud consente agli utenti che scelgono di condividere i propri dati di gestire i dati di volo e flotta, nonché i contenuti multimediali dati ricevuti dai loro droni.
Dati raccolti
Parrot Cloud raccoglie 4 tipi di dati:
Statico (dati di prodotto):
- Aereo numero di serie
- Numero di serie della batteria
- Versione del firmware del velivolo e della batteria
- Versione dell'hardware del velivolo e della batteria
- Modello del dispositivo
- Versione FreeFlight 7 Versione
Eventi
- Avvisi: Batteria, pilota automatico, sensori
- Comunicazione: collegare/scollegare, avvio streaming, avviso di interferenza, segnale debole
- Telecamera: statistiche streaming, modifiche alle impostazioni
- Volo: cambio di stato (decollo, atterraggio, hovering, ecc.), attivazione di un task di volo (piano di volo, fotogrammetria)
"Immagini contestuali"
- Timelapse- snapshot e (una volta ogni 2 minuti)
- Deep Learning (mappa di più oggetti, paesaggi per migliorare l'autonomia di volo, tracciamento, evitamento degli ostacoli)
- Stereovisione (mappa di profondità)
- Immagini attivate per evento
- Inizio e fine di precise istruzioni al passaggio del mouse, atterraggio preciso
- Incidente drone
- I volti vengono automaticamente sfocati durante la trasmissione
Telemetria
Utilizzo finale dei dati raccolti
Parrot raccoglie e utilizza solo i dati dei clienti che hanno accettato di condividerli al fine di migliorare la qualità dei suoi prodotti...
Gestione della manutenzione
Manutenzione preventiva: I nostri strumenti raccolgono tutte le informazioni relative alle missioni (tipo di missione, tempi di decollo e atterraggio, numero di missioni, posizione del drone, velocità di volo, piano di volo e impostazioni AirSDK). Ciò consente di ricevere in tempo reale informazioni precise sullo stato della flotta di droni ANAFI Ai (oltre ai loro controller e batterie).
Manutenzione correttiva: Le informazioni raccolte sono utili per determinare rapidamente lo stato di un particolare drone o batteria.
Miglioramento dell'intelligenza artificiale (AI)
Gli elementi AI di ANAFI Ai (PeleeNet, reti convoluzionali, ecc.) offrono agli utenti servizi e caratteristiche senza rivali: evitamento degli ostacoli, tracciamento del bersaglio, diverse modalità di volo. La qualità dell'AI dipende dalla quantità e dalla qualità dei dati raccolti (immagini e video): questi dati alimentano il machine learning. A questo proposito, la qualità dei dati non è l'unico elemento decisivo: anche i metadati associati a questi dati sono fondamentali. Per questo motivo, il nostro strumento raccoglie immagini e metadati su base regolare e in base agli eventi, per un totale da 30 a 50 MB al minuto.
Caratteristiche di volo
Caratteristiche aerodinamiche
Azionamenti e aerodinamica
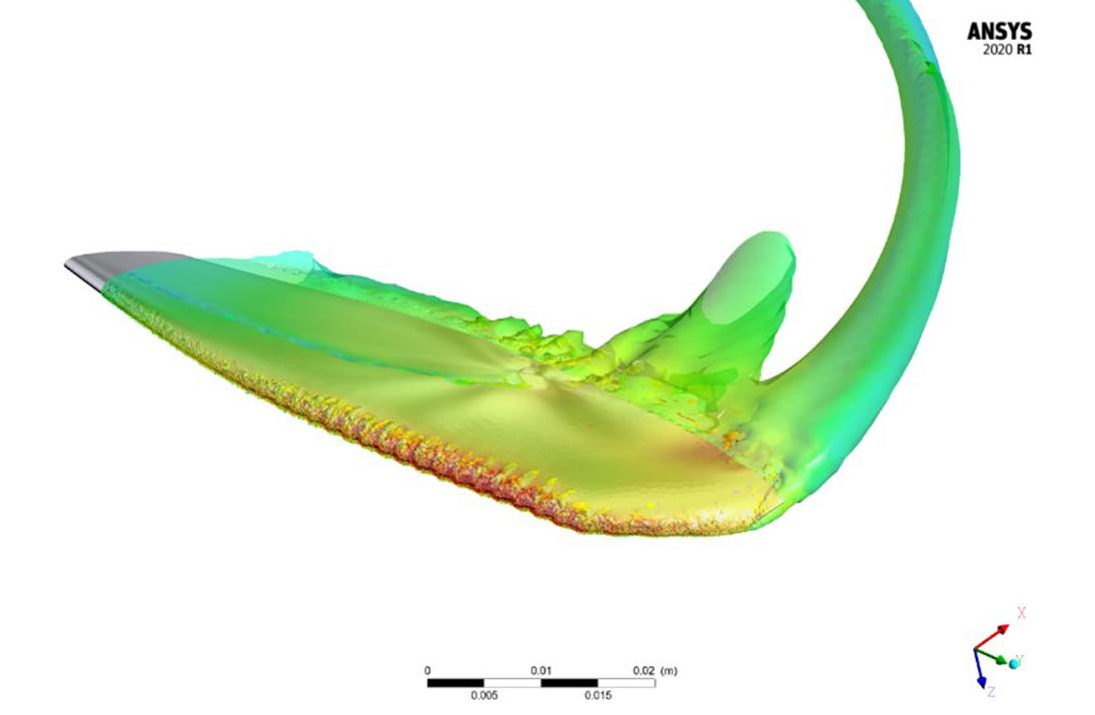 Immagine CFD delle pale dell'elica Ai ANAFI
Immagine CFD delle pale dell'elica Ai ANAFI
Nuove pale dell'elica biomimetiche con balene all'avanguardia simili a megattere. Questo approccio ha permesso di aumentare l'efficienza propulsiva della centrale, che in uscita ha fornito un aumento della spinta a parità di velocità di rotazione. Questo effetto è paragonabile ad un aumento del diametro del rotore.
Viene ridotto anche il rumore acustico, in particolare il rumore tonale, proveniente dal bordo anteriore. Pertanto ANAFI Ai è più silenzioso [71,5 dB SPL (A) a 1 m] di Skydio 2 [76,4 dB SPL (A) a 1 m].
- Tempo di volo superiore a 32 minuti
- Grazie alle caratteristiche aerodinamiche ottimizzate della fusoliera e del sistema di propulsione ANAFI Ai, la velocità massima in volo in avanti è di 61 km/h, con volo laterale e volo all'indietro 58 km / h
- Massimo resistenza al vento 12,7 m/s.
- Grazie all'elevata efficienza di coppia del motore/elica e all'elevata autonomia della batteria, l'autonomia è di 22,5 km (a una velocità costante di 50 km/h con tempo calmo).
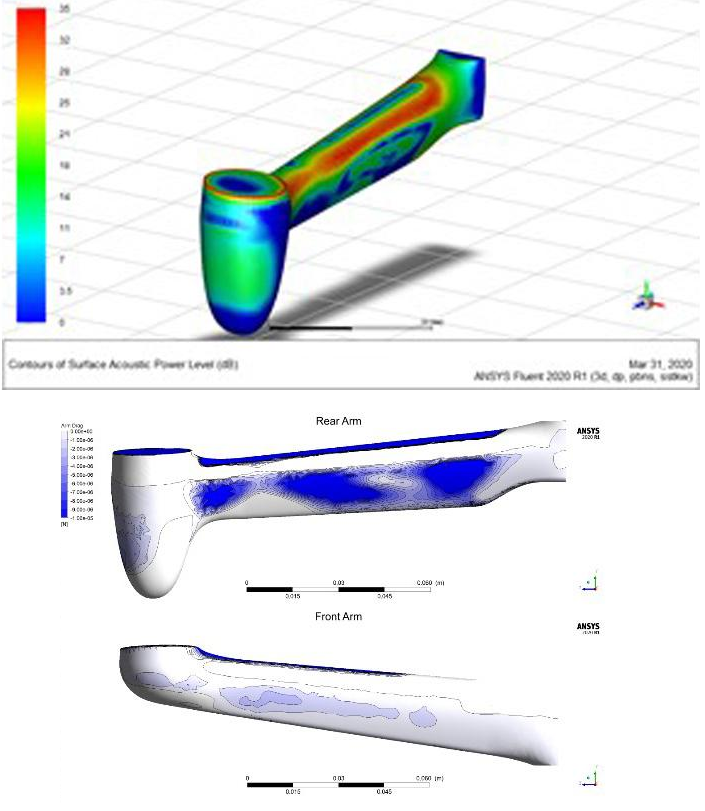 Fasci CFD ANAFI Ai
Fasci CFD ANAFI Ai
Sensori
Per garantire un volo sicuro ANAFI Ai è dotato di:
- 2 × IMU (ICM-40609-D e ICM42605)
- Magnetometro LIS2MDL
- Modulo GPS UBX-M8030
- TI OPT3101 tempo di volo (ToF)
- Barometro LPS22HB
- Telecamera verticale
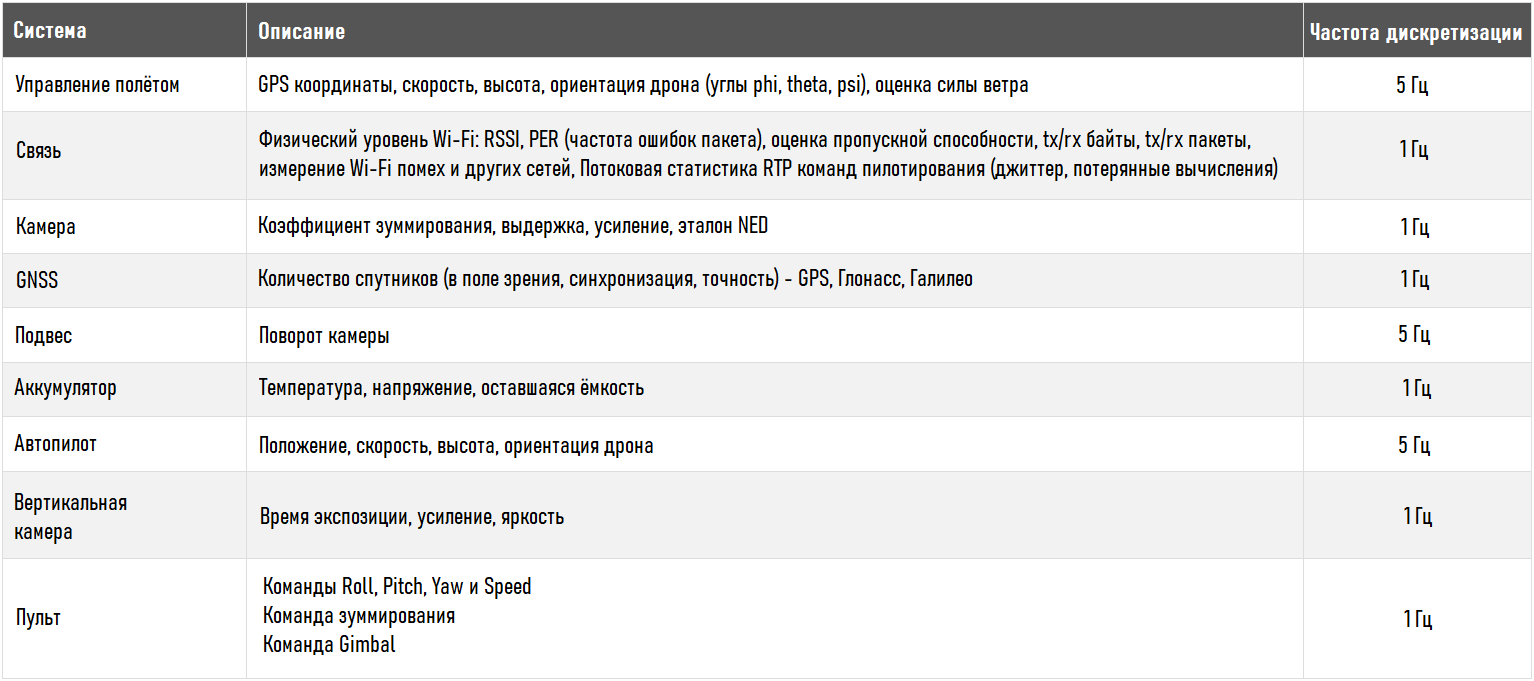
Caratteristiche del sensore
IMU di volo: ICM-40609-D
- Giroscopio a 3 assi
- Intervallo: ± 2000 ° / s
- Risoluzione: 16,4 LSB / ° / s
- Offset / Precisione: ± 0,05 ° / s (dopo calibrazione termica e dinamica)
- Accelerometro a 3 assi
- Intervallo: ± 16 g
- Risoluzione: 2.048 LSB / mg
- Offset / precisione: ± 0,5 mg (XY) ± 1 mg (Z) (dopo calibrazione termica e dinamica)
- Controllo della temperatura s: sistema di riscaldamento controllato in relazione alla temperatura ambiente, stabilizzato entro: ± 0,15 °C
- Frequenza di misura: 2 kHz
Magnetometro: LIS2MDL
- Range: ± 49.152G
- Risoluzione: 1.5 mG
- Offset / Precisione: ± 15 mG (dopo la compensazione, alla massima velocità del motore)
- Frequenza di misura: 100 Hz
Barometro: LPS22HB 1
- Intervallo: da 260 a 1260 hPa
- Risoluzione: 0,0002 hPa
- Offset / precisione: ± 0,1 hPa
- Controllo della temperatura: sistema di riscaldamento controllato in relazione alla temperatura ambiente, stabilizzato entro: ± 0,2 ° C
- Frequenza di misura: 75 Hz
- Rumore di misurazione: 20 cm RMS
GNSS: UBX-M8030 1
- Antenna patch in ceramica 25 × 25 × 4mm, consentendo un miglioramento del guadagno di 2 dB rispetto a ANAFI 1
- Sensibilità: avvio a freddo -148 dBm / tracciamento e navigazione: -167 dBm
- Tempo di prima correzione: 40 secondi
- Precisione / Precisione: Posizione (deviazione standard 1,4 m), Velocità (deviazione standard 0,5 m / s)
Fotocamera verticale
- Sensore di immagine formato: 1/6 di pollice
- Risoluzione: 640 × 480 pixel
- Sensore di immagine con otturatore globale
- Bianco e nero
- FOV: Angolo di campo orizzontale: 53,7 ° / angolo di campo verticale: 41,5 °
- Lunghezza focale: 2,8 mm
- Misurazione della velocità del flusso ottico a terra a 60 Hz
- 15 Hz e adattamento di precisione @ 5Hz
ToF: TI OPT3101
- Intervallo: 0-15 m
- Risoluzione: 0,3 mm
- Precisione b: ± 2 cm (dopo calibrazione)
- Frequenza di misurazione: 64 Hz
IMU telecamera verticale: ICM-42605
- Giroscopio a 3 assi
- Intervallo: ± 2000 ° / s
- Risoluzione: 16,4 LSB / ° / s
- Offset / precisione: ± 0,1 ° / s (dopo la dinamica Calibrazione)
- Accelerometro a 3 assi
- Intervallo: ± 16 g
- Risoluzione: 2.048 LSB / mg
- Offset / Precisione: ± 2,0 mg (XY) ± 5,0 mg (Z) - dopo calibrazione dinamica
- Frequenza di misura: 1 kHz
- Sincronizzazione hardware con telecamera verticale, precisione: 1 μs
Pilota automatico
L'ANAFI Ai Flight Controller fornisce un pilotaggio semplice e intuitivo: non è necessaria alcuna formazione per utilizzarlo. Ti consente di automatizzare molte modalità di volo (Piano di volo, Cameraman, Decollo a mano, Smart RTH). Gli algoritmi di fusione dei sensori combinano i dati di tutti i sensori per stimare il rapporto ANAFI Ai, l'altitudine, la posizione e la velocità.
La valutazione delle condizioni è essenziale per il corretto funzionamento dei droni. I quadricotteri sono intrinsecamente instabili quando il controllore di volo viene utilizzato con un circuito aperto; per controllarli facilmente, per non parlare del controllo autonomo, è necessario stabilizzarli utilizzando algoritmi di controllo ad anello chiuso. Questi algoritmi calcolano e inviano i comandi ai motori richiesti da ANAFI Ai per raggiungere le traiettorie desiderate.

Volo indoor
In assenza di un segnale GPS, ANAFI Ai si basa principalmente sulle misurazioni della telecamera verticale per stimare la velocità e la posizione. Le prestazioni della telecamera verticale sono determinate da due algoritmi principali:
- Flusso ottico per la stima della velocità
- Rilevamento e corrispondenza dei punti chiave per la stima della posizione
Telecamera verticale gli algoritmi possono funzionare in condizioni di scarsa illuminazione grazie all'ANAFI Ai dotato di una coppia di luci a LED posizionate accanto alla telecamera verticale. Consentono al drone di rimanere stabile, soprattutto quando si vola al chiuso o in assenza di GPS, ad un'altitudine inferiore a 5 m dal suolo. La potenza delle luci a LED si adatta automaticamente, a seconda delle esigenze dell'algoritmo.
Volo autonomo
Caratteristiche principali
- Sistema di rilevamento rotativo con ampio campo visivo
- Estrazione della profondità dello spazio circostante basata sull'allineamento stereo e la profondità per movimento
- Rappresentazione dell'ambiente sotto forma di una griglia di riempimento
- Rilevamento autonomo ed evitamento di ostacoli a velocità fino a 29 km/h
Questo capitolo descrive in dettaglio i sensori, l'hardware e gli algoritmi utilizzati da ANAFI Ai per consentire il volo autonomo. È organizzato come segue:
- Una descrizione dettagliata del sistema di percezione dell'Ai ANAFI
- Algoritmi percettivi utilizzati per ricostruire l'ambiente 3D che circonda i droni
- Riprogrammazione e ostacolo evitamento

Strategia del sistema di percezione
La percezione dell'ambiente tridimensionale è una capacità chiave per raggiungere il volo autonomo, soprattutto in spazi ristretti. È un prerequisito per il rilevamento e l'evitamento garantiti di ostacoli, che riduce l'onere per l'operatore del drone, aumenta il successo della missione e garantisce la sicurezza dell'aeromobile.
Liberare il pieno potenziale di una telecamera volante, che può muoversi e ruotare liberamente in tutte le direzioni senza restrizioni, richiede una soluzione di rilevamento efficace. In particolare, il sistema di rilevamento dovrebbe essere in grado di ricevere informazioni sull'ambiente in direzioni che corrispondono al movimento in avanti in volo, indipendentemente dall'orientamento della telecamera.
ANAFI Ai si affida a una soluzione tecnica unica basata su due gimbal meccanici per separare l'orientamento della fotocamera principale e il sistema di rilevamento:
- La fotocamera principale è montata su un 3- gimbal dell'asse, rendendolo l'orientamento 3D indipendente dall'orientamento del drone.
- Il sistema di rilevamento è montato su un gimbal ad asse singolo - collegato al movimento di imbardata del drone, può essere orientato in qualsiasi direzione.
 ANAFI Doppio stabilizzatore Ai per la percezione e la visualizzazione.
ANAFI Doppio stabilizzatore Ai per la percezione e la visualizzazione.
Gli assi di inclinazione dei due ganci sono collineari e combinati per ottenere un design ultracompatto.
Grazie a questa soluzione è possibile orientare la telecamera principale e il sistema di rilevamento in due diverse direzioni. Questo design evita l'uso di costose telecamere sui lati, in alto, in basso e sul retro del drone, pur fornendo un ampio campo visivo disponibile per il sistema di rilevamento.
Questa sezione è organizzata come segue:
- Dettagli dei sensori utilizzati per il sistema di rilevamento
- Specifiche sia per il gimbal della fotocamera principale che per il gimbal del sistema di rilevamento
- Strategie per indirizzare il sistema di rilevamento per sfruttare il potenziale della struttura a doppia sospensione
Sensori
Il sistema di rilevamento si basa su una coppia di telecamere identiche con un asse del passo...
 Cerniera meccanica a 1 asse per sistema di rilevamento Ai ANAFI.
Cerniera meccanica a 1 asse per sistema di rilevamento Ai ANAFI.
Le specifiche del sensore sono le seguenti:
- Modello: Onsemi AR0144CSSM28SUD20
- Colore: Monocromatico
- Risoluzione: 1280 × 800 pixel
- Frame rate: 30 fps
- Otturatore globale
- Campo visivo orizzontale completo: 118 ° (110° utilizzabile per il rilevamento)
- Campo visivo verticale completo: 72° (62° utilizzabile per il rilevamento)
- Lunghezza focale: 1,47 mm (0,039 pollici - 492,94610 pixel)
- Apertura: f/2,7
le coppie stereo sono le seguenti:
- Asse del passo comune
- Linea di base/Distanza: 62 mm (2,44 pollici)
- Cattura sincrona a 30 fps

Dual Gimbal
Il gimbal meccanico della fotocamera principale è un pitch-rol meccanico a 3 assi l-yaw” con le seguenti caratteristiche:
- Limitatori di beccheggio: -116°/176°
- Limitatori di rollio: / - 36°
- Limitatori di imbardata: / - 48°
La sospensione meccanica del sistema di rilevamento è una sospensione ad asse singolo con le seguenti caratteristiche:
- Finecorsa in passo: -107 ° / 204 °
- Tempo di percorrenza da un finecorsa all'altro: 300 ms
Il sistema di rilevamento ha una corsa di 311° (di cui 296° non mascherati dal corpo del drone), che consente la retromarcia percezione.
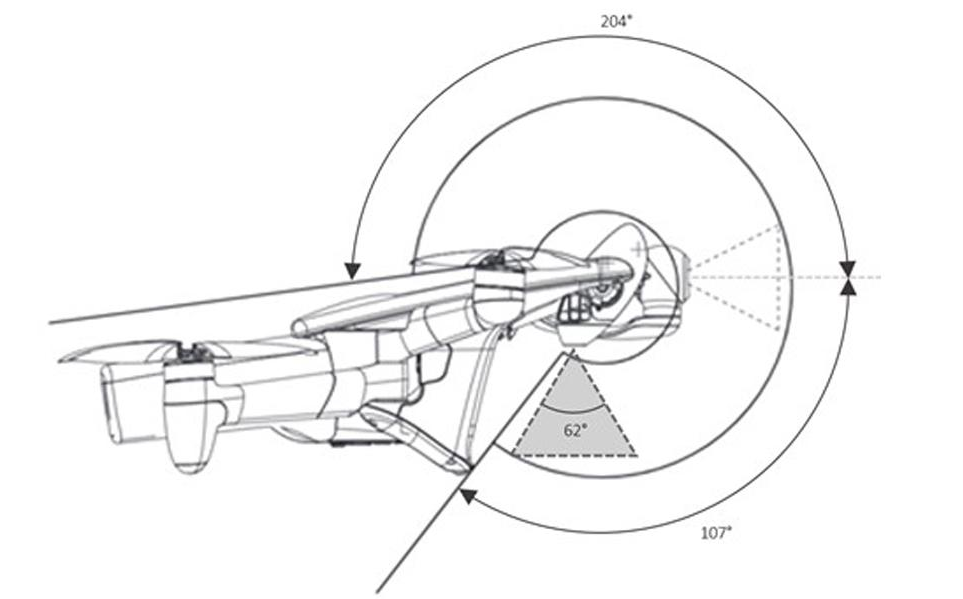
Campo visivo verticale istantaneo e sistemi di percezione limitanti ANAFI Ai.
Il sistema è stato progettato in modo tale che:
- Le pale dell'elica non entrino nel campo visivo della telecamera principale
- Le pale principali la fotocamera non copre il campo visivo del sistema di percezione
- La fotocamera principale e il sistema di rilevamento possono essere completamente ripiegati per proteggere gli obiettivi
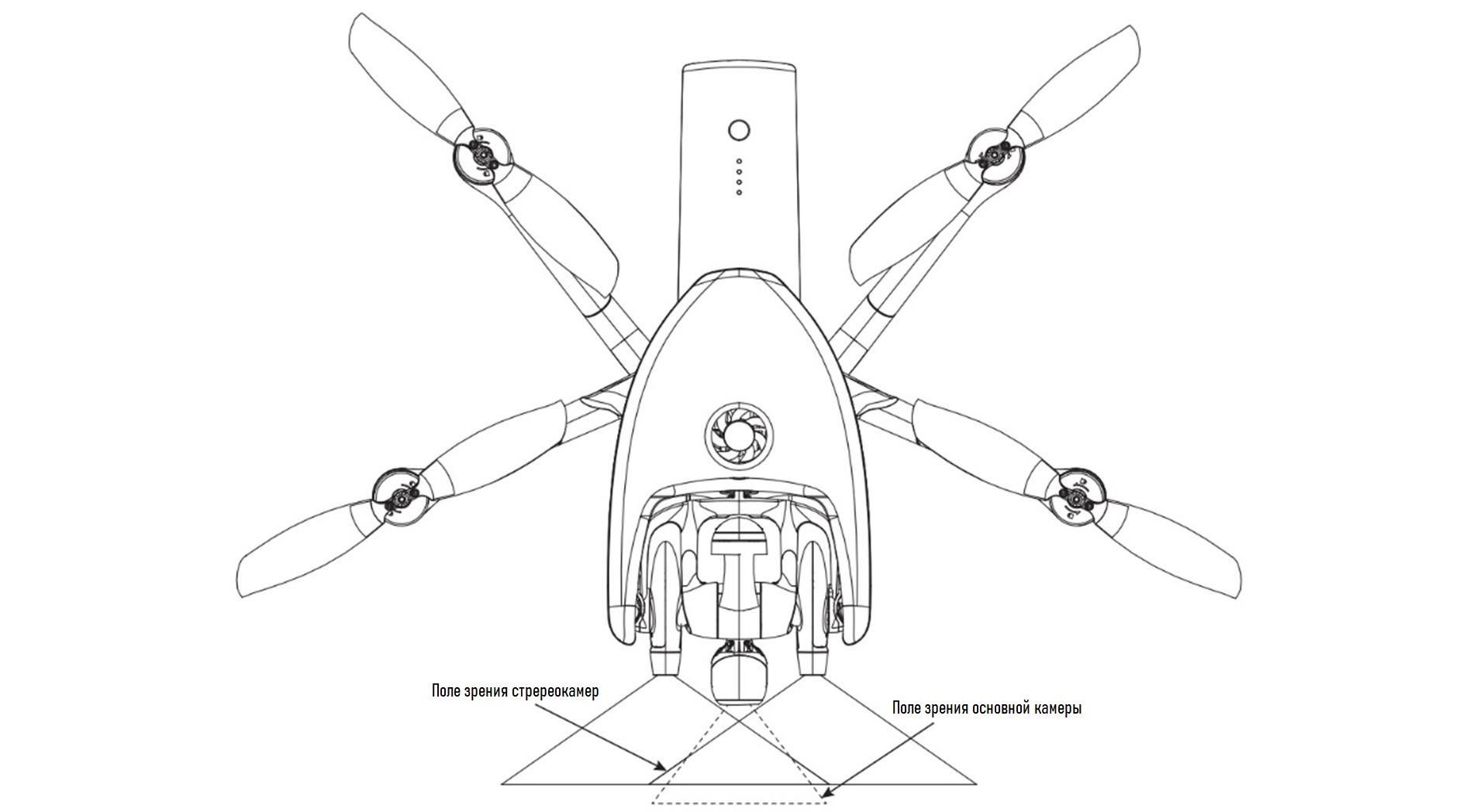 Il campo visivo orizzontale del sistema di percezione ANAFI Ai.
Il campo visivo orizzontale del sistema di percezione ANAFI Ai.
Quando ci si appoggia all'indietro, il sistema di percezione si sposta nella posizione più alta, fornendo così una visione chiara.
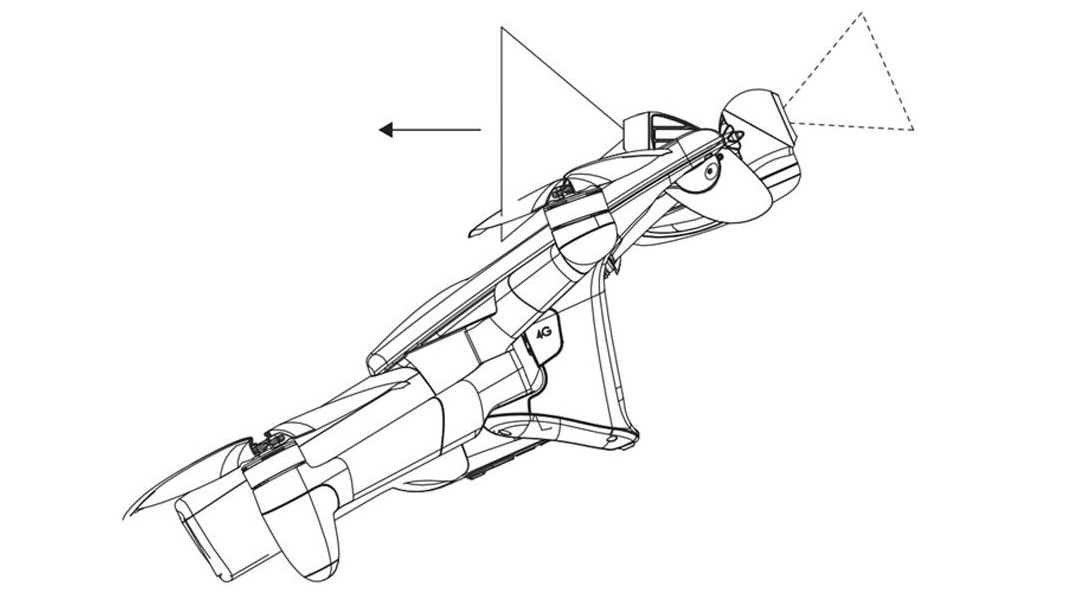
Percezione di ANAFI Ai in posizione completamente reclinata per il volo all'indietro.
Ricostruzione dell'ambiente
La ricostruzione dell'ambiente tridimensionale circostante per il volo autonomo avviene in due fasi:
- Estrazione di informazioni sulla profondità dalla percezione sotto forma di mappe di profondità
- Combinazione dei dati della mappa di profondità in una griglia tridimensionale di riempimento
Per ottenere mappe di profondità dai sensori di percezione vengono utilizzati due metodi:
- Profondità basata sull'allineamento stereo
- Profondità dal movimento
Profondità dalla corrispondenza stereo
Il metodo principale per estrarre la profondità l'informazione si basa sulla parallasse tra due telecamere stereo del sistema di percezione. Fotografando l'ambiente in una direzione, ma da due posizioni diverse, gli oggetti nel campo visivo del sistema di percezione appaiono in posizioni diverse nelle immagini ottenute da due fotocamere. Più vicino è il soggetto, maggiore è la differenza di posizione.
Pertanto, la strategia consiste nel determinare i punti nelle immagini ottenute dalle telecamere stereo sinistra e destra corrispondenti allo stesso oggetto nel campo visivo del sistema di rilevamento e misurare la differenza nella posizione di questi punti nelle due immagini. Questa differenza è chiamata disparità e si misura in numero di pixel.
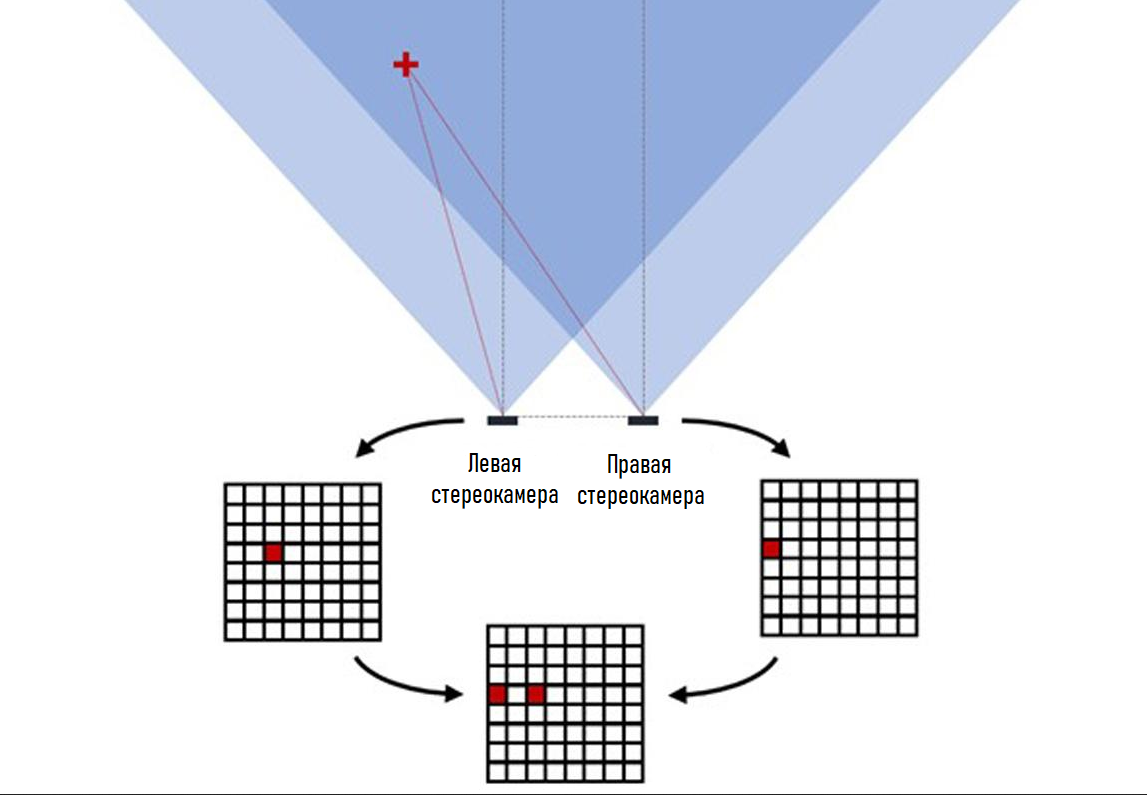 Illustrazione del principio della visione stereo: il punto rosso 3D si trova in posizioni diverse sulle immagini sinistra e destra.
Illustrazione del principio della visione stereo: il punto rosso 3D si trova in posizioni diverse sulle immagini sinistra e destra.
La disparità può quindi essere correlata alla profondità di ciascuno di questi punti utilizzando la seguente relazione profondità = focale * linea di base / disparità, dove la profondità e la linea di base sono espresse nelle stesse unità, e la focale lunghezza e disparità sono espresse nel numero di pixel.
Il risultato del calcolo assume la forma di una mappa di profondità di 176 × 90 pixel, per cui il valore di ciascun pixel corrisponde alla profondità in metri. La mappa di profondità viene aggiornata a 30 Hz.
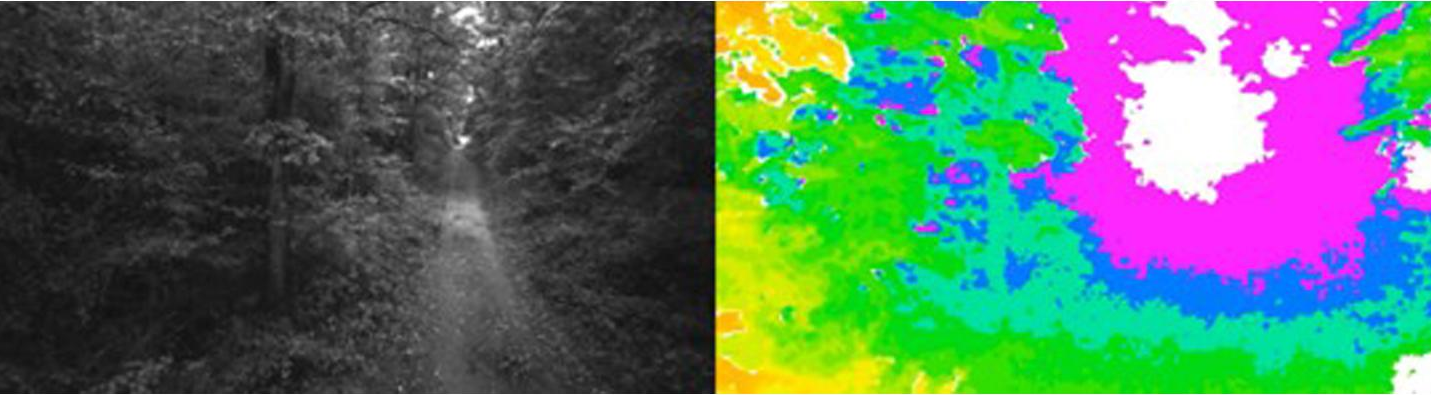
Un esempio di un'immagine catturata dalla fotocamera destra del sistema di rilevamento ANAFI Ai (a sinistra) e la profondità corrispondente ottenuta utilizzando l'imaging stereo (a destra). La mappa dei colori va dal rosso (Più vicino) al viola (Più lontano) - il bianco significa Fuori portata.
Il risultato immediato di ciò è che la profondità misurata con questo metodo è discretizzata, poiché la disparità può assumere solo valori discreti (numero di pixel). Un punto 3D situato sufficientemente lontano dal sistema di percezione e che crea una disparità teorica inferiore a un pixel sarà considerato infinito, poiché la corrispondente disparità discreta effettiva sarà uguale a 0. La precisione del metodo di confronto stereo diminuisce con l'aumentare della distanza, sebbene ci sono metodi che possono ridurre questo fenomeno ottenendo il campionamento subpixel.
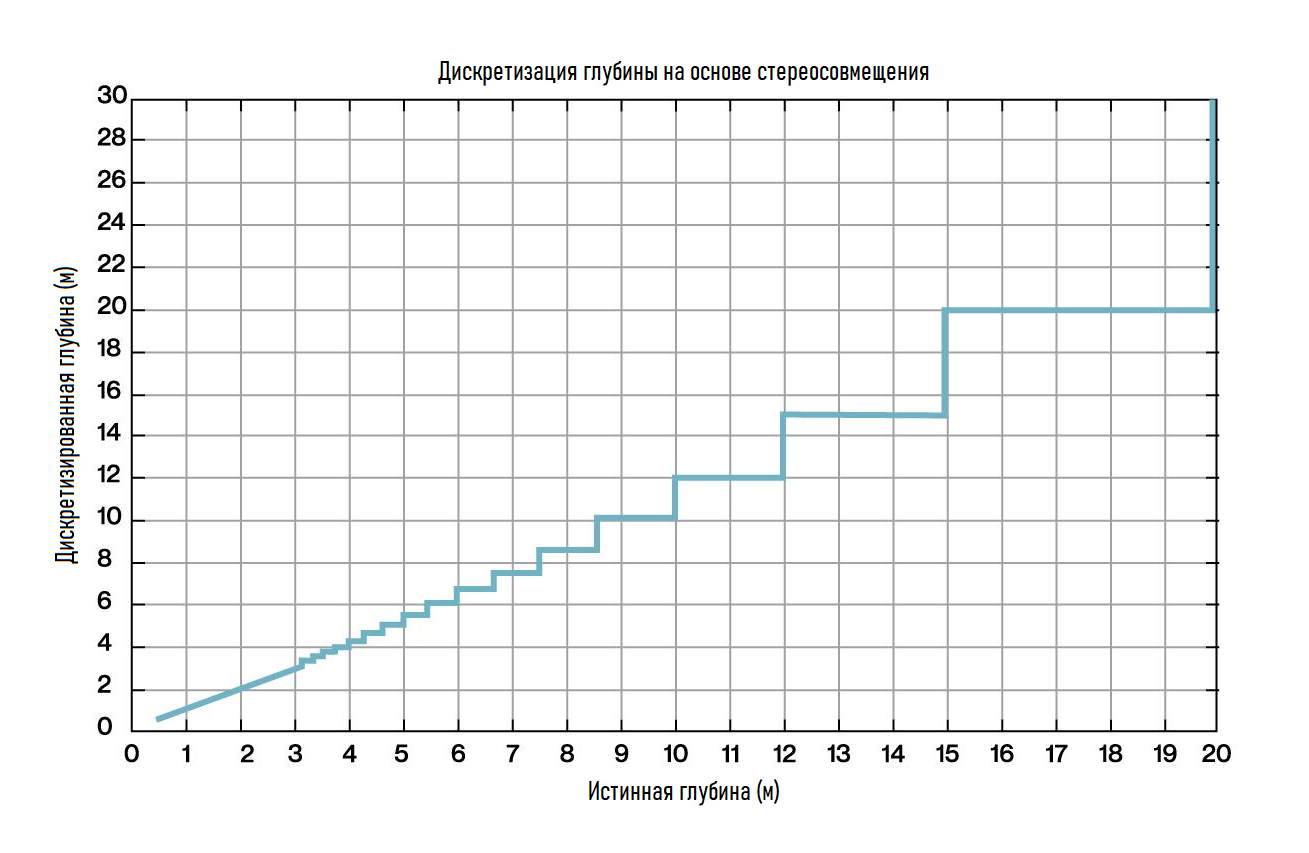 Profondità discretizzata misurata da "allineamento stereo" rispetto a "profondità reale".
Profondità discretizzata misurata da "allineamento stereo" rispetto a "profondità reale".
Inoltre, la disparità diverge quando la profondità si avvicina allo zero. Poiché il numero di pixel nelle immagini è limitato, anche il valore di disparità è limitato. Di conseguenza, esiste una profondità minima alla quale il sistema percettivo è cieco. Questa profondità minima è di 36 cm per ANAFI Ai.
Informazioni sulla calibrazione: Ogni coppia di telecamere stereo è calibrata in fabbrica per misurare accuratamente le piccole discrepanze che possono esistere tra le due telecamere e compensarle nei calcoli della profondità a bordo.
L'utente può anche ricalibrare una coppia di telecamere stereo utilizzando il modello di prova fornito con il drone. In particolare, in una certa misura, il drone è in grado di rilevare potenziali errori di calibrazione che possono verificarsi durante la sua vita. In questo caso, il software del velivolo tenterà di regolarli e compensarli e, se ciò non riesce, verrà visualizzata una notifica che chiede di ricalibrare.
Profondità dal movimento
Il movimento del drone può essere utilizzato anche per raccogliere immagini dell'ambiente da diverse angolazioni e ricostruire così le informazioni sulla profondità. Questa tecnica è chiamata profondità dal movimento, o rilevamento monoculare, perché una singola telecamera in movimento è sufficiente per raccogliere informazioni sulla profondità.
Il principio di funzionamento è simile alla visione stereo, ma invece di confrontare le immagini dell'ambiente ottenute da diversi osservatori contemporaneamente, la percezione confronta le immagini dell'ambiente ottenute dallo stesso osservatore in momenti diversi. Se il drone è in movimento, le immagini di questo osservatore unico verranno catturate da diverse angolazioni. Conoscendo la posizione in cui è stato ripreso ogni fotogramma, è possibile triangolare i punti corrispondenti alla stessa caratteristica in immagini diverse e riportarli al 3D.
L'output è una nuvola di punti tridimensionale contenente fino a 500 punti per ANAFI Ai, generata a una frequenza di 10 Hz.
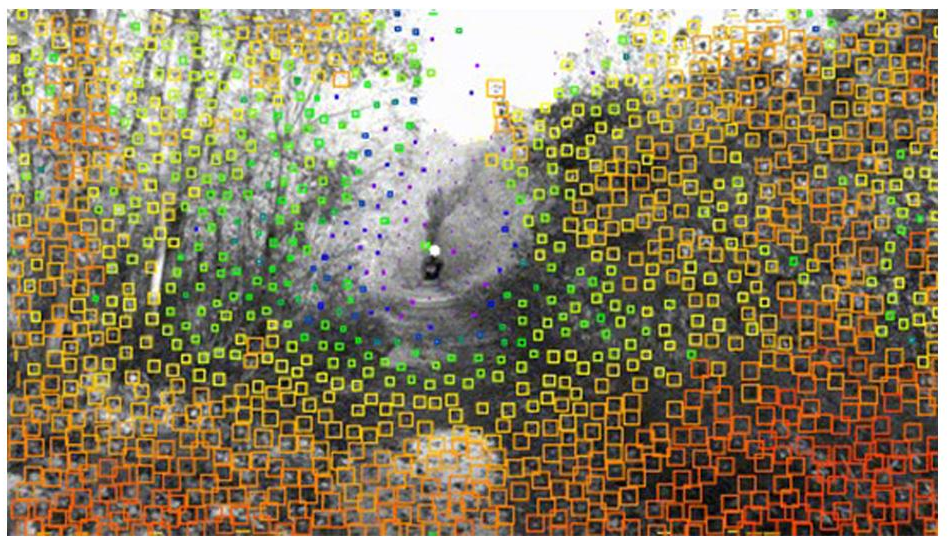 Un esempio di nuvola di punti creata in base alla profondità dal movimento: la mappa dei colori va dal rosso (Più vicino) al viola (Più lontano).
Un esempio di nuvola di punti creata in base alla profondità dal movimento: la mappa dei colori va dal rosso (Più vicino) al viola (Più lontano).
L'algoritmo ANAFI Ai Motion Depth in genere genera meno informazioni (nuvola di punti sparsa) rispetto all'algoritmo di corrispondenza stereo e richiede che il drone si muova per raccogliere informazioni. Inoltre, questo algoritmo non può estrarre informazioni nell'esatta direzione del movimento (almeno per le trasmissioni in diretta), poiché gli oggetti nelle immagini appaiono quasi fermi in questa direzione (focus di espansione).
Tuttavia, ha un intervallo di rilevamento migliore (intervallo teoricamente infinito) rispetto alla corrispondenza stereo.
Griglia di riempimento
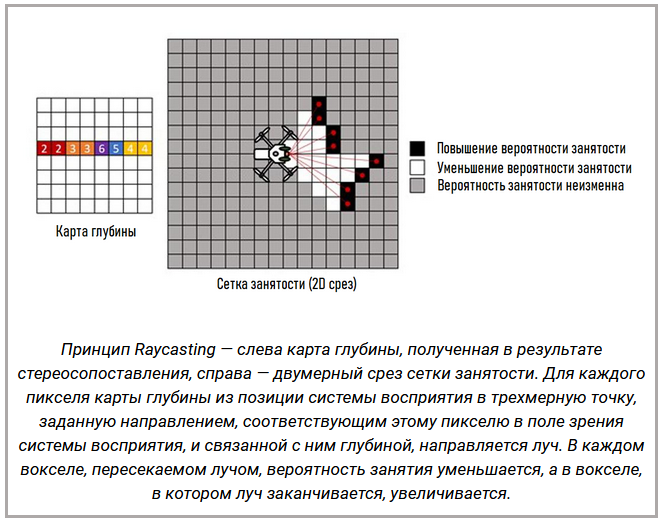
Le informazioni sulla profondità provenienti da algoritmi di rilevamento stereo e monoculare sono integrate nella griglia di riempimento. Questa mesh campiona l'ambiente 3D in cubi 3D chiamati voxel. Ad ogni voxel viene assegnata la probabilità di essere occupato da un ostacolo o, al contrario, di essere libero da un ostacolo.
Un algoritmo di trasmissione dei raggi viene utilizzato per integrare le informazioni sulla profondità in una griglia di riempimento. Per ogni pixel della mappa di profondità ottenuta come risultato del confronto stereo, viene convertito in un punto tridimensionale e, per ogni punto della nuvola di punti, nella profondità ottenuta come risultato del movimento:
- Un raggio viene disegnato nella griglia di riempimento dalla posizione del sistema di percezione alla posizione del punto 3D.
- Aumenta la probabilità che un voxel contenente un punto 3D venga occupato.
- Si riduce la probabilità che tutti i voxel attraversati da un raggio diverso da quello contenente il punto 3D siano occupati.
Pertanto, la griglia funge da filtro temporale per le informazioni sulla profondità, assorbendo qualsiasi potenziale rumore nella misurazione della profondità e come memoria delle misurazioni precedenti, il che consente di navigare in ambienti difficili anche in assenza di un campo visivo continuo a 360° del sistema di percezione.
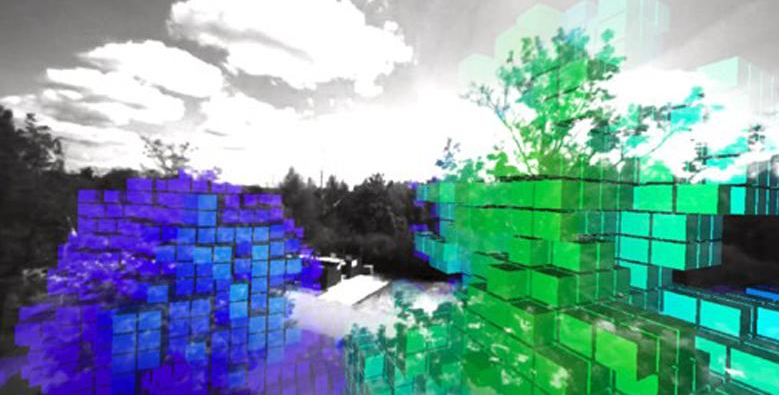 Un esempio di griglia di riempimento. I voxel vengono sovrapposti alla visualizzazione della telecamera stereo destra con un alto grado di certezza che sono occupati, che vanno dal rosso (vicino) al viola (lontano).
Un esempio di griglia di riempimento. I voxel vengono sovrapposti alla visualizzazione della telecamera stereo destra con un alto grado di certezza che sono occupati, che vanno dal rosso (vicino) al viola (lontano).
La griglia di riempimento è la base per gli algoritmi di pianificazione del movimento utilizzati da ANAFI Ai per il volo autonomo e l'evitamento degli ostacoli.
Evitamento ostacoli
Grazie alla conoscenza dell'ambiente 3D del drone memorizzato nella griglia di riempimento, ANAFI Ai può evitare gli ostacoli. Ciò fornisce una sicurezza aggiuntiva significativa per le missioni autonome, ma è utile anche per il volo manuale, soprattutto se la linea di vista tra il pilota e il drone è compromessa.
Ogni 30 ms ANAFI Ai prevede quale sarà l'orizzonte temporale nominale in futuro. Questa previsione è dedotta dai link inviati dall'utente, siano essi comandi di volo dal telecomando, waypoint da allegare a un piano di volo o una traiettoria di input. Quindi, utilizzando il modello simulato del drone interno, l'algoritmo di riprogrammazione calcola le più piccole correzioni possibili a questa traiettoria nominale prevista che la rendono esente da collisioni e fattibile per il drone.
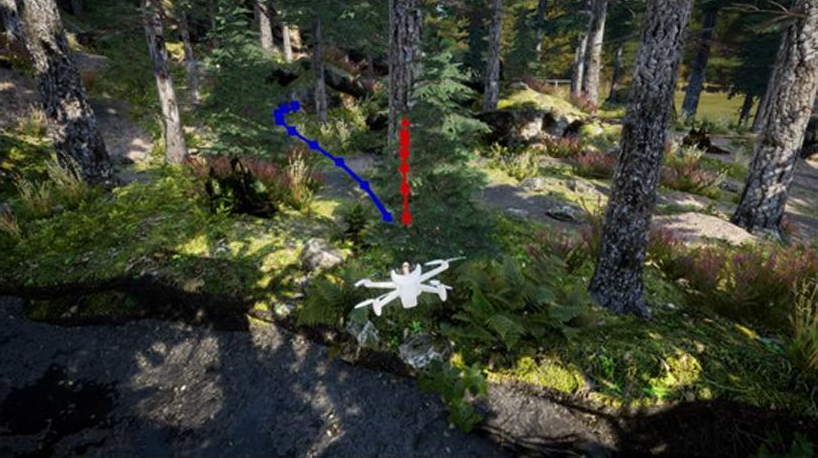 Un esempio della traiettoria corretta calcolata dall'algoritmo di evitamento degli ostacoli in risposta alla collisione della traiettoria di riferimento con un albero.
Un esempio della traiettoria corretta calcolata dall'algoritmo di evitamento degli ostacoli in risposta alla collisione della traiettoria di riferimento con un albero.
Il sistema di prevenzione degli ostacoli ANAFI Ai è stato progettato per funzionare a velocità fino a:
- Volo livellato: 29 km/h
- Salita: 14 km/h
- Discesa: 11 km/h
Le prestazioni di evitamento sono limitate in caso di pioggia o vento forte, scarsa illuminazione o navigazione satellitare interrotta. Inoltre, prima di volare, è necessario assicurarsi che le lenti del sistema di rilevamento siano pulite.
Missioni di volo

Caratteristiche principali
Aereo SDK (vedi.sezione SDK) consente agli sviluppatori di accedere a ogni sensore drone, fotocamera, interfaccia di connettività e funzione standalone. Pertanto, possono personalizzare il comportamento del drone per creare missioni di volo. Ogni missione di volo contiene una serie di comportamenti o modalità di base:
- A terra: Comportamento allo spegnimento dei motori, ad es. calibrazione del sensore.
- Decollo: varie strategie di decollo
- Hover: mantenimento punto fisso
- Volo: funzioni manuali e volo autonomo
- Atterraggio: varie strategie di atterraggio
- Critico: al rilevamento di uno stato critico
Le missioni di volo personalizzate possono creare nuovi comportamenti o riutilizzarli dalla missione predefinita.
Prezzo e disponibilità
L'inizio delle vendite del drone ANAFI Ai è previsto per settembre 2021. Le informazioni sui prezzi non sono state divulgate al momento. Continuiamo a monitorare le informazioni in arrivo e aggiorneremo sicuramente questa sezione in un secondo momento.

Scarica la documentazione
Documentazione dello sviluppatore:
- Scarica la documentazione tecnica completa dal sviluppatore
- Scarica le specifiche del prodotto dallo sviluppatore
Video
Migliori recensioni ANAFI Ai da lo sviluppatore e gli utenti
Disimballaggio e primo volo.
Volo di prova del drone a distanza con connessione 4G. Il tempo di volo totale è stato di 29 minuti a una velocità di volo orizzontale media di 58 km/h (16 m/s). Durante questo periodo, il drone è stato in grado di coprire 27 km. Si può anche notare che il volo è stato effettuato in condizioni di forte vento, che è stato costantemente avvertito dal sistema di droni.
.






