
- 1 مقدمه
- 2 توسعه دهنده دستگاه
- 3 ویژگی
- 4 بسته مطالب
- 5 مشخصات
- 5.1 هواپیمای بدون سرنشین
- 5.2 ارتباط
- 5.3 سیستم ناوبری
- 5.4 Skycontroller 4
- 5.5 باتری هوشمند هواپیما
- 5.6 برنامه
- 5.7 دوربین
- 5.8 حالت پرواز خودکار
- 5.9 امنیت سایبری
- 5.10 طوطی SDK
- 6 ظاهر
- 7 ارتباط
- 7.1 4G
- 7.2 حداکثر. محدوده با اتصال 4G
- 7.3 Wi-Fi
- 7.4 ویدئوی زنده
- 8 دوربین
- 8.1 ماتریس 48 مگاپیکسل
- 8.2 لنز
- 8.3 حالت های ویدئویی
- 8.4 رمزگذاری ویدیو
- 8.5 HDR
- 8.6 حالت عکس
- 9 تثبیت ترکیبی
- 9.1 گیمبال دوربین اصلی
- 10 فتوگرامتری
- 10.1 بازرسی و نقشه برداری
- 10.2 هوش مصنوعی و 4G
- 10.3 پرواز خودکار
- 11 فتوگرامتری یا لیدار
- 11.1 مزایای فتوگرامتری
- 11.2 منفی LIDAR
- 12 SDK
- 12.1 SDK هوایی
- 12.2 SDK زمینی
- 12.3 OpenFlight
- 12.4 Sphinx
- 12.5 Olympe
- 12.6 PdrAW
- 12.7 Models C. A. D.
- 12.8 MAVLink و GUTMA سازگاری
- 13 بزرگترین اکوسیستم شریک برای هواپیماهای بدون سرنشین طوطی
- 13.1 طوطی برای هر گونه نیاز تجاری
- 14 امنیت سایبری
- 14.1 حریم خصوصی داده ها
- 14.2 FIPS 140 سازگار -2 و دارای CC EAL5 Secure Element
- 14.3 اتصال امن 4G و احراز هویت قوی
- 14.4 راه اندازی و ارتقاء امن
- 14.5 تنظیم کلیدهای کاربر بر روی عنصر امن
- 14.6 عکسهای امضای دیجیتالی
- 14.7 شفافیت و امنیت مداوم با استفاده از اشکال اشکال
- 15 مدیریت داده ها
- 15.1 داده های جمع آوری شده
- 15.2 استفاده نهایی از داده های جمع آوری شده [1 26]
- 15.3 بهبود هوش مصنوعی (AI)
- 16 ویژگی های پرواز
- 16.1 ویژگی های آیرودینامیکی
- 16.2 محرکها و آیرودینامیک
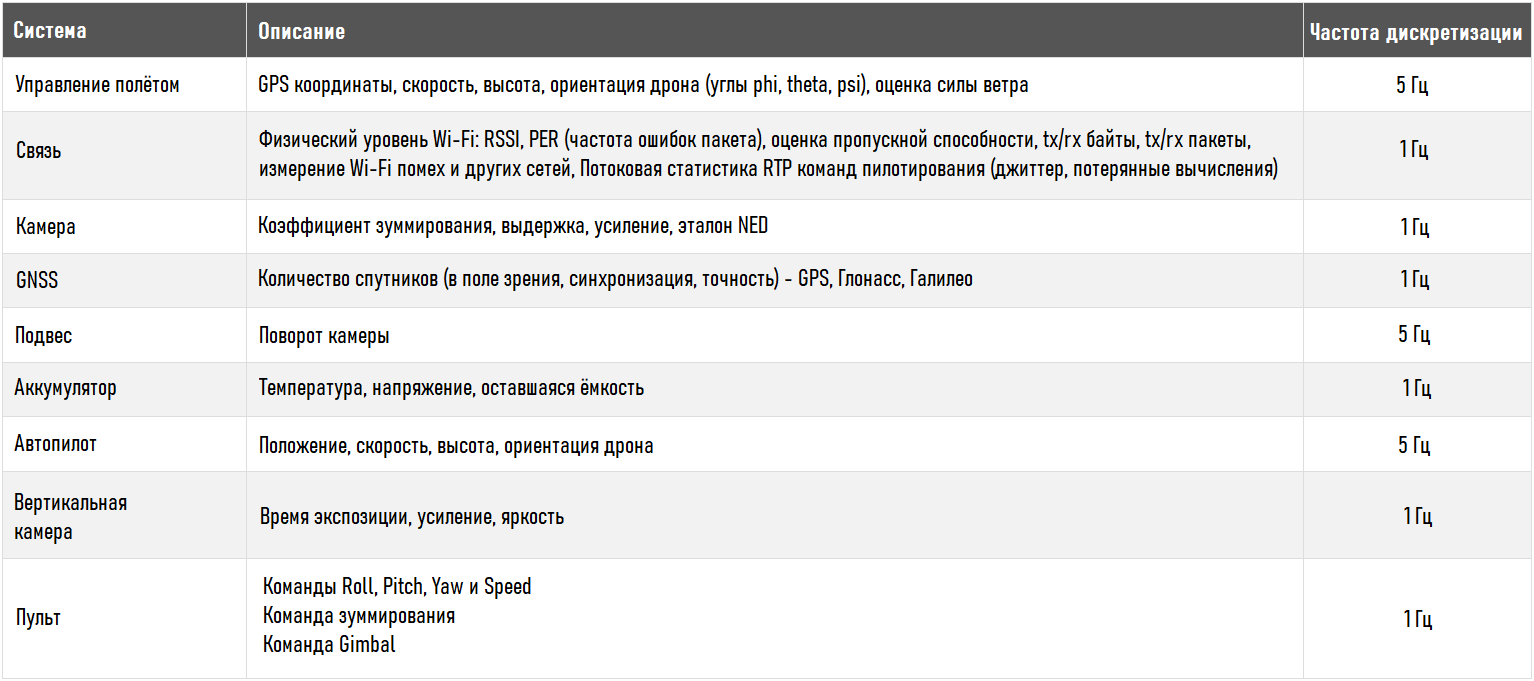
- 16.3 سنسورها
- 16.4 مشخصات سنسور
- 16.5 خلبان خودکار
- 17 پرواز خودکار
- 17.1 ویژگی های کلیدی
- 17.2 استراتژی سیستم ادراک
- 17.3 سنسور
- 17.4 17.4 تعلیق دوگانه
- 17.5 بازسازی محیط
- 18 ماموریت پرواز
- 18.1 ویژگی های کلیدی
- 19 قیمت و در دسترس بودن
- 20 بارگیری مستندات
- 21 فیلم
مقدمه [16 4]
Parrot Anafi Ai یک راه حل کاملاً جدید منحصر به فرد از یک توسعه دهنده مشهور فرانسوی استاستفاده تجاری
کارت تلفن آنافی آی ماژول داخلی 4G است که به لطف آن پهپاد توانست از نسل چهارم ارتباطات تلفن همراه به عنوان کانال اصلی انتقال داده بین هواپیمای بدون سرنشین و تجهیزات کنترل استفاده کند ، که در واقع همه محدودیت های محدوده پرواز را برداشته و عملکرد پهپاد را در خارج از دید از پیش تعیین می کند.با نگاهی به جلو ، توجه می کنیم که پتانسیل اعلام شده ماشین فوق العاده قدرتمند بود و بیش از هر زمان با ظاهر آینده نگرانه آن مطابقت دارد ، که از طبیعت برای ایجاد مهندسان فرانسوی الهام گرفته شده است.
توسعه دهنده درباره ماشین
مارتین لین ، مدیر بازاریابی در Parrot، هواپیماهای بدون سرنشین طوطی

ویژگی ها
ویژگی های کلیدی طوطی آنافی آی:
- وزن 898 گرم زمان پرواز 60 ثانیه) سازگار با LTE در سراسر جهان
- مجهز به سیستم انتقال سیگنال همه جانبه (4 آنتن جهت دار با بازتابنده (با افزایش: آنتن 2.5 dBi / s). پهپاد بسته به جهت و موقعیت آن نسبت به بهترین جفت آنتن را تعیین می کند موقعیت خلبان)
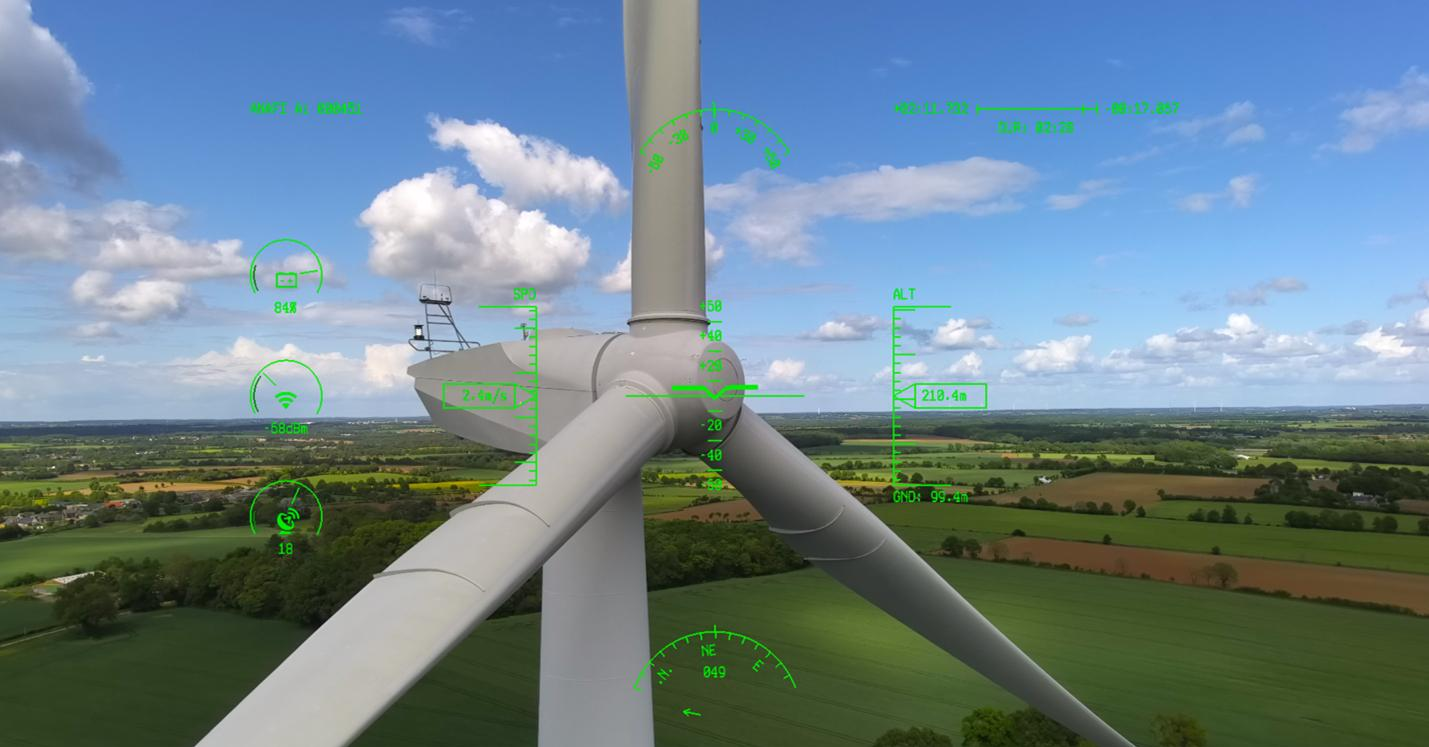
- مجهز به یک سیستم تصویربرداری همه جانبه منحصر به فرد از جهان اطراف که بر اساس یک جفت دوربین استریوسکوپی نصب شده بر روی یک گیمبال تخصصی با دامنه پهن 330 درجه (از -120 درجه تا 210 درجه) ، کار همزمان با یک سیستم بهینه سازی هوشمند مسیرهای پرواز
- برای پروازهای داخلی
- پخش مستقیم ویدئو با وضوح 1080p با تأخیر کم (300 متر بر ثانیه) بدون محدودیت برد در هر نقطه از جهان ، با نرخ بیت ویدیو 12 مگابیت بر ثانیه
- قابلیت انتقال فایلها به فضای ذخیره سازی ابری مستقیم در پرواز
- ماژول ارتباطی Wi-Fi داخلی (Wi-Fi 802.11a / b / g / n) برای کنترل کامل تعامل پهپاد / تجهیزات (مانند یک گزینه اتصال جایگزین)
- برده. محدوده فرکانس Wi-Fi: 2.4GHz / 5.8GHz
- حداکثر. محدوده پرواز FPV از طریق Wi-Fi: 9 کیلومتر
- حالت عملکرد خودکار منحصر به فرد ماژول های 4G / Wi-Fi ، که به شما امکان می دهد ، بر اساس ازدحام شبکه ، به طور یکپارچه از یک فناوری ارتباطی به دیگری بدون از دست دادن داده تغییر دهید.
- هواپیمای بدون سرنشین کلاس حفاظتی IPX3
- حداکثر. مدت زمان پرواز 32 دقیقه
- حداکثر. سرعت پرواز افقی 61 کیلومتر در ساعت
- حداکثر. مقاومت باد: 13 متر بر ثانیه
- حداکثر.سقف از سطح دریا 5000 متر
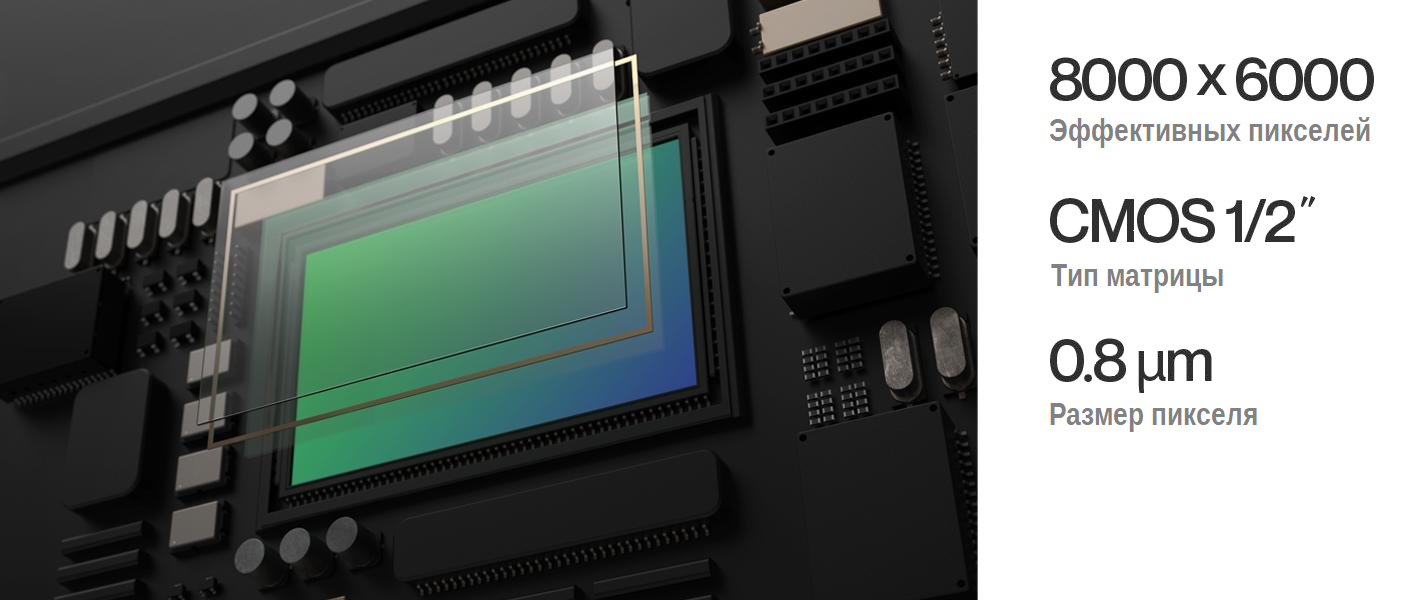
- دوربین 4 مگاپیکسل 4K بر اساس ماتریس CMOS 1/2 اینچی با اندازه پیکسل 0.8 میکرون ؛ با آرایه فیلتر رنگی بایر
- لنز نوری LD-ASPH
- سیستم تثبیت کننده تصویر 6 محور ترکیبی (EIS دیجیتال مکانیکی 3 محوره 3 محوره)
- قابل کنترل محدوده عملکرد Gimbal -90 ° تا 90 °
- 6x بزرگنمایی دیجیتال بدون تلف (2x 4K / 4x FHD)
- حداکثر. نرخ بیت ویدیو 200 مگابیت بر ثانیه
- فرمت های فیلمبرداری HDR8 / HDR10
- حداکثر. محدوده دینامیکی 14EV
- مشخصات رنگ P-log برای پردازش پس از پردازش
- 5 × حالتهای پرواز و عکسبرداری خودکار (عکاسی سنجی / نقشه پرواز / فیلمبردار / RTH هوشمند / خودرو)
- شکافهای داخلی برای MicroSD و سیم کارت
- سازگار با PIX4D Suite
- حالتهای پرواز فتوگرامتری در موبایل موجود است. برنامه FreeFlight 7 و نرم افزار OpenFlight
- ایجاد طرح پرواز با یک کلیک
- 48 مگاپیکسل 1 عکس بر ثانیه: دو برابر سریعتر از رقبا
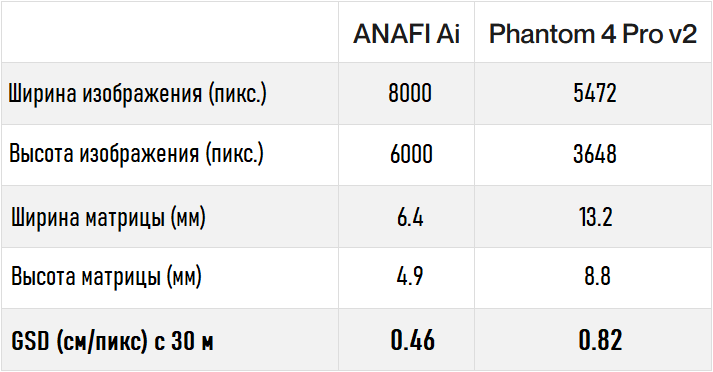
- دقت عکسبرداری: 0.46 سانتی متر در پیکسل. GSD در 30 متر
- پشتیبانی طوطی SDK (با قابلیت جاسازی کد خود در هواپیمای بدون سرنشین با استفاده از Air SDK ، ایجاد برنامه های تلفن همراه با استفاده از Ground SDK ، پیکربندی یک ایستگاه زمینی منبع باز با استفاده از OpenFlight ، تعامل با Sphinx مدرن ابزار شبیه سازی هواپیماهای بدون سرنشین و همچنین اسکریپت نویسی پایتون با Olympe و پردازش ویدیو و فوق داده با PdrAW)
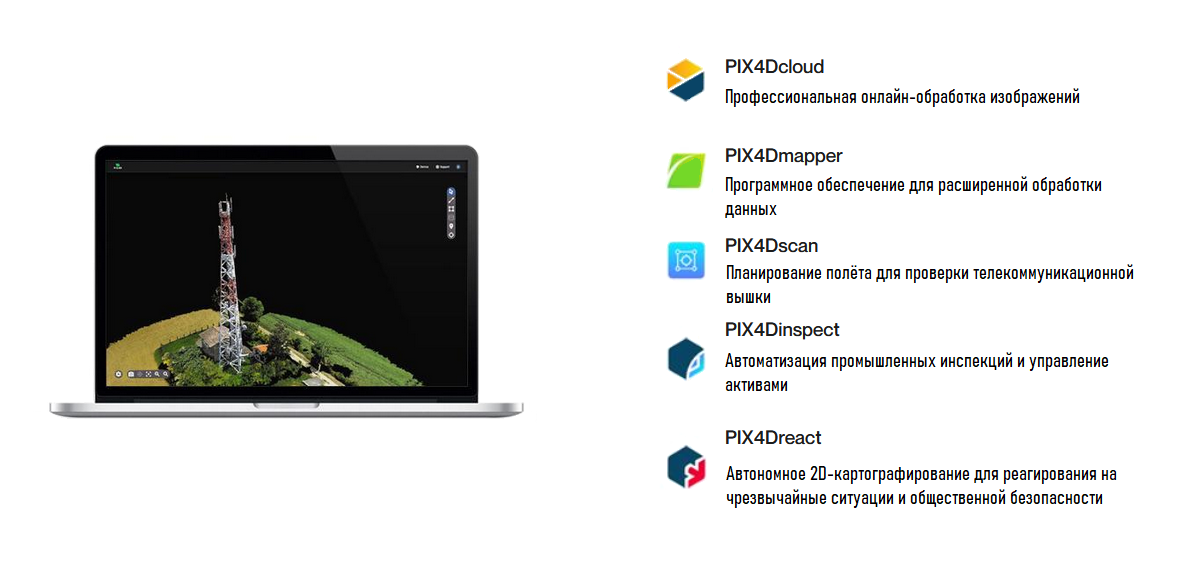
- سازگار با نرم افزار شخص ثالث: PIX4Dscan، PIX4Dinspect، PIX4Dcloud، PIX4Dreact، PIX4Dsurvey
- ANAFI Ai مطابق مقررات مقررات حفاظت از داده های اتحادیه اروپا (GDPR)
- حفظ حریم خصوصی برتر با NIST FIPS140-2 سطح 3 عنصر امن WISeKey با معیارهای رایج گواهینامه EAL5
- ویدئو و کنترل های حفاظت شده با SRTP / DTLS مطابق webRTC
- تجهیزات کنترل قابل حمل جدید Parrot Skyco ntroller 4
- برنامه تلفن همراه جدید Parrot FreeFlight 7

بسته
توسعه دهنده هواپیمای بدون سرنشین را ارائه می دهد در یک پیکربندی واحد ، که شامل موارد زیر است: باتری

مشخصات
هواپیما

ارتباط
سیستم ناوبری
Skycontroller 4

باتری هوشمند هواپیما
برنامه

)دوربین

) حالتهای پرواز مستقل
امنیت سایبری536]ویژگی ها: اطلاعات صفر بدون رضایت کاربر منتقل می شود مطابق با گواهینامه امنیتی FIPS140-2 و CC EAL5 احراز هویت قوی برای 4G دارای امضای دیجیتالی عکس شفافیت و امنیت مداوم Bountyطوطی SDK
SDK هوا: قابلیت های رمزگذاری داخلیSDK زمینی: کیت توسعه iOS و AndroidOpenFlight: هسته آزاد منبع آزاد 7 پروازابوالهول: شبیه ساز 3D PhotorealisticOlympe: رابط برنامه نویسی کنترل کننده پایتونPDrAW: مجموعه ابزارهای ویدئویی و فوق داده
سپس ، شما می توانید با اطلاعات کلیدی Parrot Anafi Ai آشنا شوید ، که به شما امکان می دهد در مورد پتانسیل اعلام شده دستگاه و همچنین پیشرفت هایی که در مقایسه با نسخه تجاری هواپیمای بدون سرنشین انجام شده است ، اطلاعات بیشتری کسب کنید Parrot Anfi Thermal و دیگر هواپیماهای بدون سرنشین از مارک های برجسته.
ظاهر





ارتباط
4G
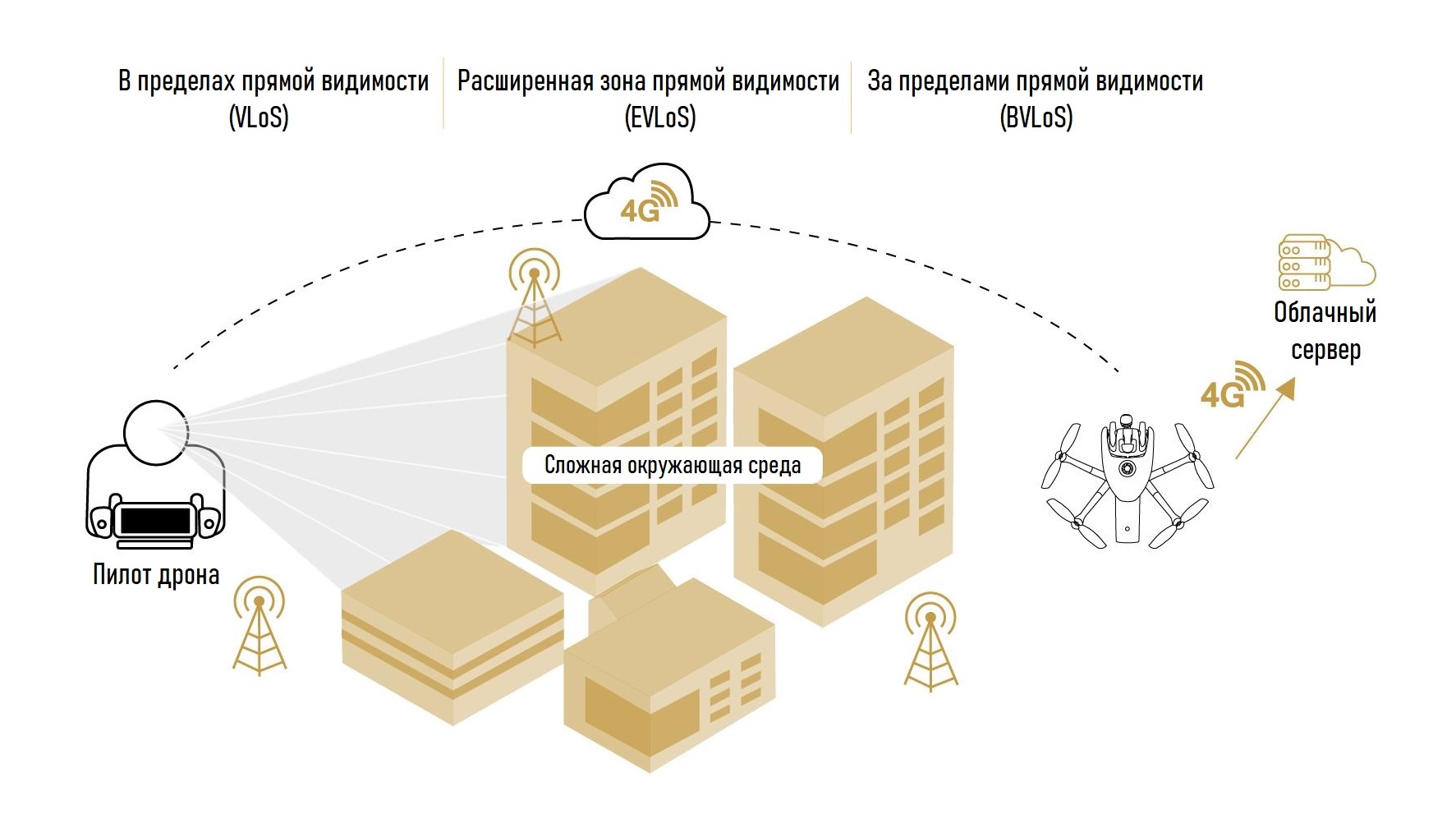
ANAFI Ai شامل ماژول رادیویی 4G (علاوه بر ماژول رادیویی Wi-Fi) ، که به شما امکان می دهد جریان ویدئویی را با کیفیت 1080p با حداکثر سرعت بیت 12 مگابیت بر ثانیه ، با تأخیر بسیار کم (300 میلی ثانیه) ، بدون محدودیت در محدوده و در هر نقطه از جهان پخش کنید.
سازگاری
ماژول ANAFI Ai 4G از بیش از 28 باند فرکانسی پشتیبانی می کند و بیش از 98 درصد فرکانس های مستقر در سراسر جهان را پوشش می دهد.
سوئیچ خودکار شبکه
کیفیت و پهنای باند شبکه های 4G و Wi-Fi هر 100 میلی ثانیه اندازه گیری می شود تا جریان را با شرایط شبکه تطبیق دهد. در ترکیب با الگوریتم های مسیریابی ، ارتباط بین هواپیمای بدون سرنشین و کنترل کننده آن حتی زمانی که Wi-Fi به شدت مختل شده است ، حفظ می شود. بنابراین ، هنگامی که پهنای باند م (ثر (پهنای باند قابل استفاده) Wi-Fi زیر 1.5 مگابیت بر ثانیه باشد ، سیستم به طور خودکار به 4G تغییر می کند.
برای محدود کردن مصرف داده های تلفن همراه هنگامی که خلبان در محدوده شبکه Wi-Fi هواپیمای بدون سرنشین است ، انتقال از 4G به Wi-Fi نیز به طور خودکار بدون قطع جریان ویدئو انجام می شود.
حداکثر محدوده با اتصال 4G
ویدیوی توسعه دهنده حداکثر را نشان می دهد. محدوده پرواز Anafi Ai با اتصال 4G در یک جهت با یک بار شارژ باتری. کل زمان پرواز 29 دقیقه با متوسط سرعت پرواز افقی 58 کیلومتر در ساعت (16 متر بر ثانیه) بود. طی این مدت ، هواپیمای بدون سرنشین توانست 27 کیلومتر را طی کند. همچنین می توانید متوجه شوید که پرواز در شرایط باد شدید انجام شده است ، که مدام توسط سیستم پهپادی هشدار داده می شد.
پیاده سازی الگوریتم های بهینه سازی جریان ویدئو
کنترل ازدحام 4G
الگوریتم کنترل ازدحام اجازه می دهد:
- میزان از دست دادن بسته را در کل چرخه شبکه اندازه گیری کنید.
- اندازه گیری تاخیر (زمان رفت و برگشت).
- پهنای باند را با توجه به این دو پارامتر تنظیم کنید.
هدف نهایی این الگوریتم حداکثر کردن پهنای باند موجود و حفظ کمترین تاخیر ممکن است. این الگوریتم بر روی هر یک از رابط های موجود در هواپیمای بدون سرنشین اجرا می شود که هر کدام دارای پارامترهای خاص خود هستند که مطابق با شبکه بهینه شده است. بر اساس اطلاعات ارائه شده توسط این الگوریتم ، مدیر پیوند مسیریابی و تصمیمات رابط فعال را می گیرد.
کنترل پهپاد از طریق اتصال 4G
ANAFI Ai در صورتی که پهپاد خارج از محدوده Wi-Fi باشد و در کمتر از 15 ثانیه در کمتر از 30 ثانیه از طریق 4G به کنترل از راه دور متصل می شود. اگر پهپاد در محدوده Wi-Fi باشد. و همچنین اتصال 4G فراهم می کند:
- تشخیص و شروع اتصال بر اساس پروتکل VOIP SIP.
- برای برقراری ارتباط بر روی شبکه های امن از سرور رله استفاده کنید.
عملکرد جریان ویدئو
- تاخیر: 300 میلی ثانیه.
- امنیت: ویدیو و کنترل ها با توجه به webRTC با SRTP / DTLS محافظت می شوند.
- آنتن ها: 28 باند LTE از 700 مگاهرتز تا 2.6 گیگاهرتز.

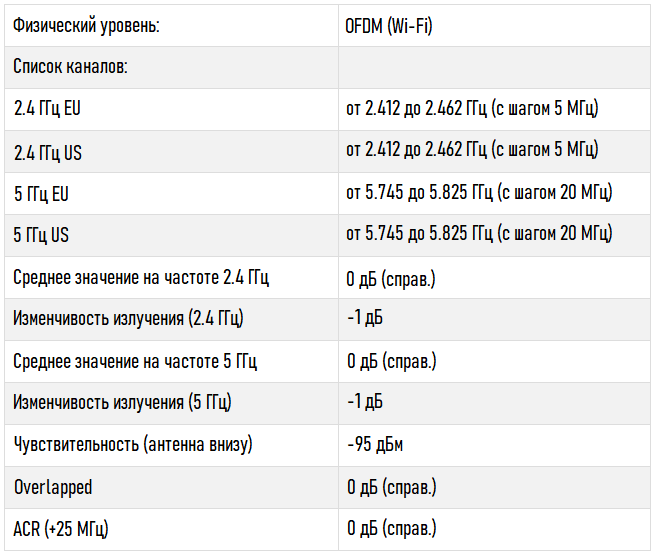
Wi-Fi
سیستم انتقال همه جهته
- ANAFI Ai دارای 4 آنتن بازتابنده جهت دار (با افزایش آنتن: 2.5 دسی بل بر ثانیه). پهپاد بر اساس جهت و موقعیت آن نسبت به موقعیت خلبان ، بهترین جفت آنتن را تعیین می کند.
- با افزایش مجدد 3.5 / - 1.5 دسی بل در سطح افقی هواپیمای بدون سرنشین ، افزایش ANAFI RF Ai بسیار یکنواخت است.
- تابش آنتن پایین دست 4 dB نسبت به ANAFI بهبود یافته است.
طراحی خارجی رادیوی پرقدرت
جلوی رادیو با خطی بسیار خوب ، قدرت پایه آنتن را به حداکثر می رساند. حساسیت (-94 دسی بل در 6.5 مگابیت بر ثانیه) برای دستیابی به حداکثر قدرت محدود کننده FCC.

قابلیت اطمینان Wi-Fi
پارامترهای 802.11
پهنای باند کم ، تاخیر کم ، تغییرپذیری سطح پذیرش به دلیل سرعت هواپیمای بدون سرنشین ، برد بلند ، وجود تداخل. این پارامترها شامل تجمیع ، آزمایش مجدد ، فناوری MiMo (STBC) ، کنترل سرعت داده فریم و شرایط قطع ارتباط است.
پیشگیری از تداخل هوشمند
ANAFI Ai دارای الگوریتمی برای حذف کانال (2.4 گیگاهرتز و باند دو گیگاهرتز دوگانه) در صورت تداخل است.
انطباق و نظارت بر جریان
ANAFI Ai به طور مداوم وضعیت پیوند 4 هرتز خود را زیر نظر دارد و می تواند تداخل را تشخیص دهد. این به شما امکان می دهد پهنای باند و اندازه بسته های منتقل شده را به صورت پویا بهینه کنید. همچنین در صورتی که خلبان در محیط خاصی قرار داشته باشد یا سیگنال خود را از دست دهد هشدار می دهد.
کاهش پهنای باند
در محدوده محدوده و در صورت اجازه شرایط ، ANAFI Ai می تواند پهنای باند 10 مگاهرتز را تغییر دهد تا حساسیت آن را 3 دسی بل افزایش داده و دامنه را تا 40 درصد افزایش دهد.

نشانگرهای رادیویی
پخش ویدئو
نشانگرهای پیوند ویدیویی
پیاده سازی الگوریتم های بهینه سازی جریان ویدئو
Parrot Gen4 Streaming (نسل 4)
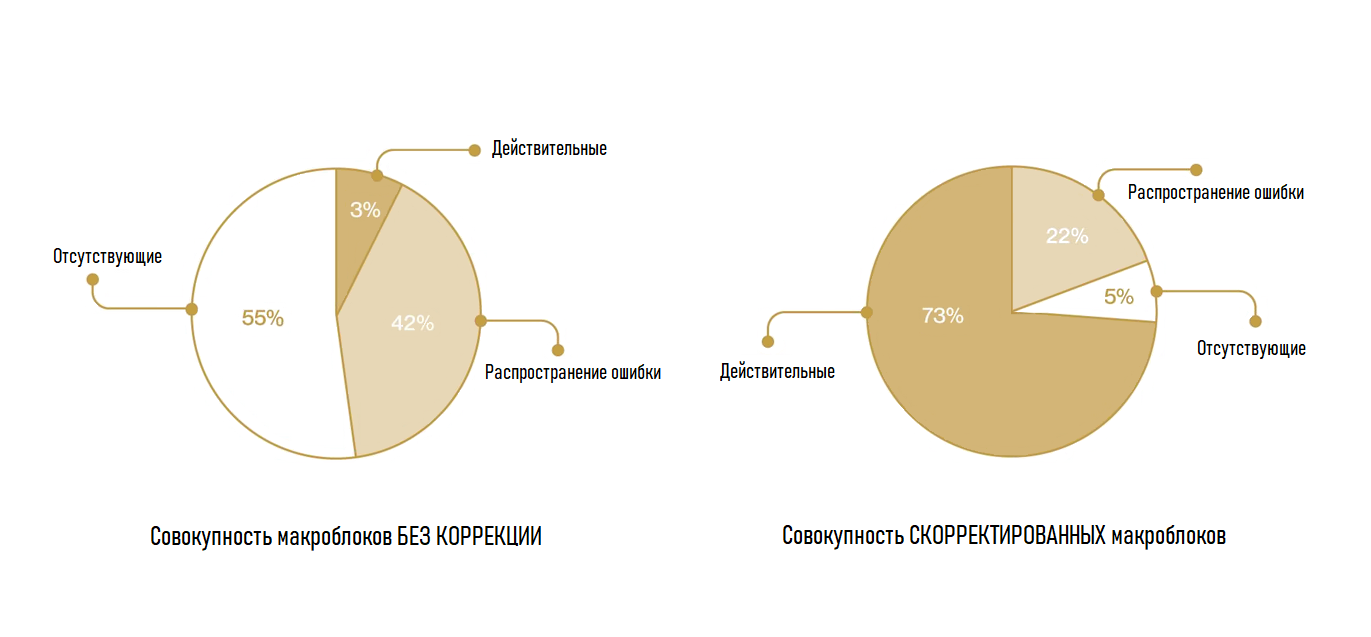
این الگوریتم تاثیر بصری تلفات شبکه را کاهش می دهد و قابلیت همکاری را فراهم می کند همه رمزگشاها ، در حالی که یک جریان کامل نحوی را ارائه می دهند: قسمتهای گم شده تصویر به عنوان قسمتهای مفقود شده بازسازی می شوند ، مشابه آنچه در تصویر مرجع وجود دارد.
بنابراین ، خطاها در مناطقی وجود دارند که مستعد از بین رفتن هستند و در کل تصویر اعمال نمی شوند.
نمودارهای زیر میزان موفقیت رمزگشایی ماکروبلاک را در 5٪ از دست دادن شبکه نشان می دهد - با و بدون ویژگی های جریان پیشرفته ANAFI Ai. این الگوریتم رمزگشایی صحیح 75 درصد از بلوک های ماکرو را تضمین می کند. آنها به کاربر اجازه می دهند تا بدون انجماد صفحه یا از دست دادن جریان ، به مأموریت خود ادامه دهد.
کنترل احتقان
این الگوریتم همچنین محیط Wi-Fi و رادیو را برای پیش بینی و جلوگیری از اتلاف بسته و ازدحام شبکه ، که به کاهش تأخیر کمک می کند ، ارزیابی می کند.این الگوریتم برآورد ظرفیت کانال است که بر اساس نرخ داده و میزان خطا در لایه فیزیکی محاسبه می شود. سپس بر روی پارامترهای کدگذاری و کپسوله سازی شبکه تأثیر می گذارد.
فراداده
فراداده با جریان ویدئویی منتقل می شود. به طور خاص ، آنها شامل عناصر تله متری هواپیماهای بدون سرنشین (موقعیت ، ارتفاع ، سرعت ، میزان باتری و غیره) و معیارهای ویدئویی (زاویه دوربین ، مقدار نوردهی ، میدان دید و غیره) هستند.
همگام سازی تصاویر و فراداده باز عملکردهای موقعیت دقیق روی نقشه ، ردیابی ابزارهای پرواز در HUD یا فعال کردن عناصر واقعیت افزوده را انجام می دهد.
فراداده با استفاده از روشهای استاندارد (پسوند سرصفحه RTP) گنجانده شده است. فرمت داده تعریف شده توسط Parrot منبع باز است: در ANAFI Ai SDK موجود است.
دوربین

سنسور 48 مگاپیکسل
ماتریس ANAFI Ai شامل تعداد زیادی از مگاپیکسل برای عکاسی هوایی دقیق.
از فناوری آرایه فیلتر رنگ Quad Bayer استفاده می کند ، جایی که گروه های 4 پیکسل مجاور رنگ یکسانی دارند. بنابراین ، ضبط HDR زمان واقعی را می توان در دو حالت عکس و فیلم با افزودن سیگنال از چهار پیکسل مجاور به دست آورد.
محدوده دینامیکی آن 4 برابر ماتریس های استاندارد بایر است. حتی صحنه های پیچیده را می توان با حداقل برجسته سازی یا از دست دادن جزئیات سایه فیلمبرداری کرد.
لنز
لنز ANAFI Ai مخصوص طوطی ساخته شده است. ترکیبی از 6 عنصر کروی است و برای کاهش شعله ور شدن نوری بهینه شده است. این لنز در حالت فیلمبرداری استاندارد 68 درجه HFoV و در حالت عکس استاندارد 64.6 درجه HFoV می دهد.

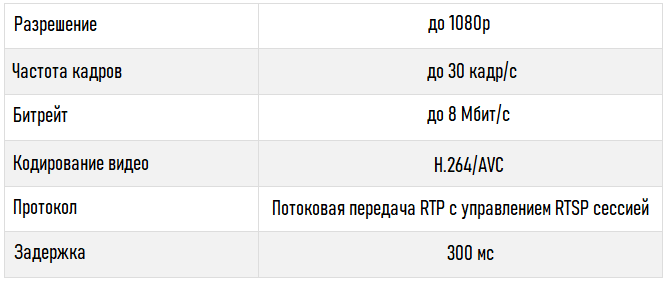
حالت های ویدئویی
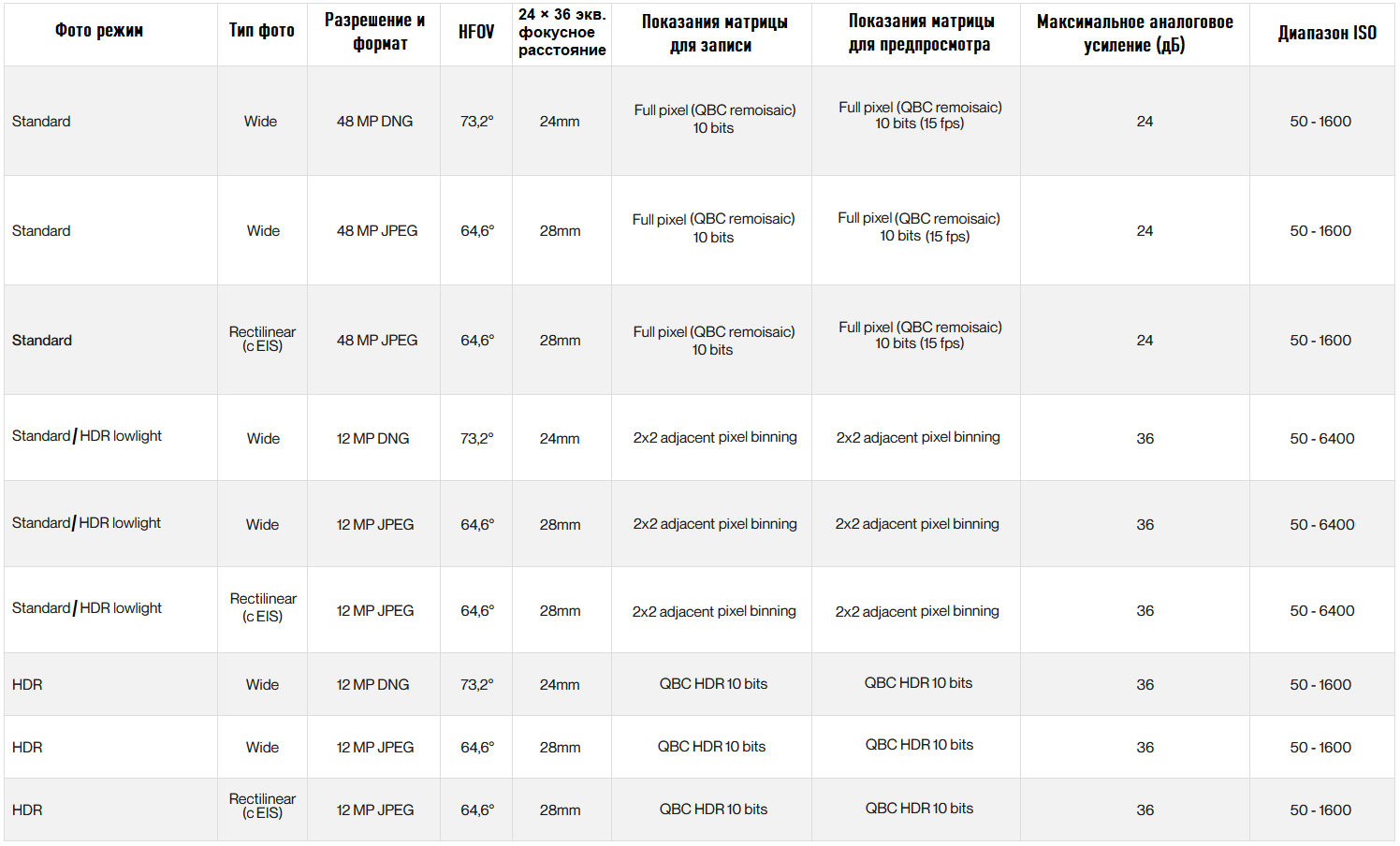
ANAFI Ai فیلم صاف 4K را با سرعت 60 فریم بر ثانیه ضبط می کند ، از جمله P-Log ، و همچنین HDR10 4K فیلم با حداکثر سرعت 30 فریم در ثانیه در جدول زیر کلیه حالت های ویدیویی ANAFI Ai لیست شده است.

کدگذاری ویدیو
کاربران می توانند بین H.264 (AVC) و H.265 (HEVC) یکی را انتخاب کنند.
در همه رزولوشن ها از فرمت های پیکسلی زیر استفاده می شود:
- YUV420p (فضای رنگی 8 جفتی BT.709) برای حالت استاندارد و HDR8.
- YUVJ420p (8 بیت / جزء ، محدوده کامل - فضای رنگ BT.709) برای سبک P -log.
- YUV420p10 (فضای رنگی 10bpc BT.2020) برای ضبط HDR10 ، فقط H.265.
HDR
هنگام ضبط ویدئو در HDR8 و HDR10 ، ANAFI Ai محدوده دینامیکی 14EV را پوشش می دهد. فرمت HDR10 حداکثر روشنایی 1000 نیت و عمق رنگ 10 بیت را ارائه می دهد. این طیف رنگی میلیاردی در مقابل 16 میلیون را برای محدوده دینامیکی استاندارد ارائه می دهد. در مقایسه با HDR8 ، HDR10 با افزایش کنتراست ، تصاویر را بیش از دو برابر روشن تر تولید می کند. HDR8 را می توان در هر صفحه استاندارد نمایش داد ، در حالی که HDR10 مخصوص تلویزیون ها و صفحه های HDR10 است.
حالت های عکس
شرح حالات
بخش کنترل حالت شامل تنظیماتی است که بر تعداد عکس های گرفته شده در هر بار باز شدن شاتر تأثیر می گذارد به
حالت ضبط تنها
حالت عکاسی تک نفره استاندارد. پس از هر بار شاتر ، تصویر گرفته شده بلافاصله توسط سیستم پردازش می شود.
حالت Bracketing
کاربران می توانند مجموعه ای از 3 ، 5 یا 7 فریم را با نوردهی متفاوت برای هر فریم عکاسی کنند. ایستگاه از پیش تنظیم شده زیر موجود است:
- [-1 EV ، 0 ، 1 EV] (تنظیمات پیش فرض)
- [-2 EV ، -1 EV ، 0 ، 1 EV ، 2 EV]
- [-3 EV ، -2 EV ، -1 EV ، 0 ، 1 EV ، 2 EV ، 3 EV]

حالت پشت سر هم
حالت پشت سر هم به کاربر این امکان را می دهد که در یک ثانیه 10 فریم پشت سر هم بگیرد.
حالت پانوراما
حالت پانوراما شامل چهار عکس مختلف پانوراما است:
- کروی (360 درجه) یک حالت پانوراما است که شامل سه گزینه برای عکسبرداری از پانورامای کروی: کره / سیاره کوچک / تونل.
- افقی (180 درجه)
- عمودی (109 درجه)
- فوق العاده در سراسر جهان - فوق العاده جدید حالت دوخت گسترده 9 تصویر (HFOV 110 درجه ، پانورامای مستقیم)
برای جزئیات بیشتر در مورد مشخصات حالت پانوراما ، به جدول زیر مراجعه کنید:

حالت Timelapse
این حالت به شما امکان می دهد در فواصل زمانی ثابت زیر عکس بگیرید:
- 48MP: 1 ، 2 ، 4 ، 10 ، 30 یا 60 ثانیه.
- 12 مگاپیکسل: 0.5 ، 1 ، 2 ، 4 ، 10 ، 30 یا 60 ثانیه.
حالت GPS GPS Lapse
این حالت عکس برای بازرسی و فتوگرامتری ایجاد شده است. این امکان را به شما می دهد تا در فواصل ثابت زیر عکس بگیرید: 5 ، 10 ، 20 ، 50 ، 100 یا 200 متر.
جدول زیر حالت ها و وضوح تصویربرداری ثابت را نشان می دهد ، از جمله حالت بازخوانی سنسور:
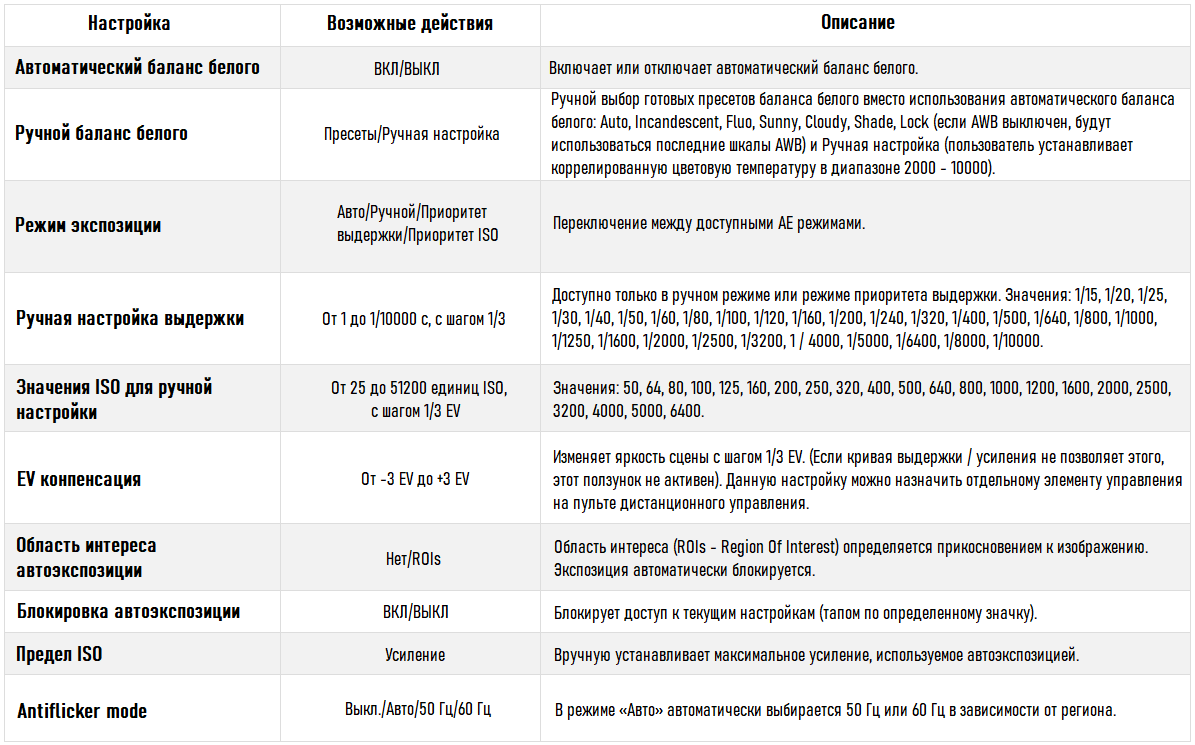
تنظیمات
در موارد زیر جدول تنظیمات موجود برای هر حالت را لیست می کند.
زوم 6 برابر
بزرگنمایی در همه حالت های عکس و فیلم در دسترس است. در ترکیب با سنسور 48 مگاپیکسلی ، الگوریتم های وضوح دقیق حتی در هنگام استفاده از زوم دیجیتال 6 برابر ، تصاویری با وضوح بالا تولید می کنند. کاربران ANAFI Ai اکنون می توانند جزئیات 1 سانتی متر را از فاصله 75 متری مشاهده کنند. تعداد پیکسل های بالا همچنین باعث می شود فیلم 4K بدون از دست دادن کیفیت بر روی 1080p بریده شود.

تثبیت ترکیبی
ANAFI Ai دارای دقیق ترین تثبیت کننده در بازار پهپادهای خرد است.
ترکیبی از تثبیت کننده:
- مکانیکی 3 محوره (مکانیزم 3 محوره).گیمبال)
- الکترونیکی 3 محوره (EIS)
تثبیت مکانیکی بدون توجه به موقعیت پرواز هواپیمای بدون سرنشین ، محور اشاره دوربین را تثبیت می کند. تثبیت کننده تصویر الکترونیکی ، اثرات میکرو ارتعاش را برای فرکانسهای بالای 100 هرتز که درایو مکانیکی نمی تواند از عهده آنها برآید ، تصحیح می کند.
گیمبال دوربین اصلی
تثبیت مکانیکی به شما امکان می دهد محور افقی نمای دوربین را در هر 3 محور تثبیت و جهت دهید.
 3 محور مکانیسم چرخش. تعلیق دوربین اصلی ANAFI Ai.
3 محور مکانیسم چرخش. تعلیق دوربین اصلی ANAFI Ai.
ویژگی های کلیدی
- گیمبال مکانیکی 3 محور برای دوربین اصلی
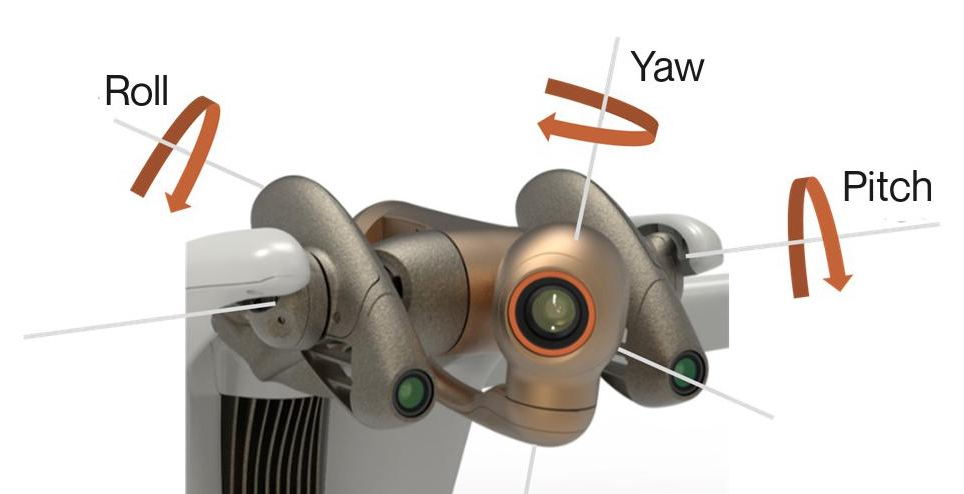
- افست عمودی 292 درجه ، میدان دید -116 درجه تا 176 درجه
عملکرد گیمبال
- الگوریتم EIS اثرات تزلزل و اعوجاج لنزهای واید را تصحیح می کند و همچنین دیجیتال 3 محوره را انجام می دهد تثبیت کننده تصویر (Roll ، Pitch و Yaw).
- این روش شامل اعمال تغییر شکل هندسی تصویر است. تحول هندسی به لطف IMU با مهر زمان و موقعیت دقیق همراه است.
- با توجه به اعوجاج نوری ، ارتعاشات و حرکات واحد دوربین اندازه گیری شده ، تغییر شکل هندسی روی هر تصویر اعمال می شود.
محدوده محوری 292 درجه
این دوربین دارای محدوده چرخشی افقی -116 درجه -176 درجه در اطراف محور گام است ، بنابراین مشاهده در بالا و پایین هواپیمای بدون سرنشین را فراهم می کند ، که یک فرصتی منحصر به فرد در بازار میکرو پهپاد.
![]()
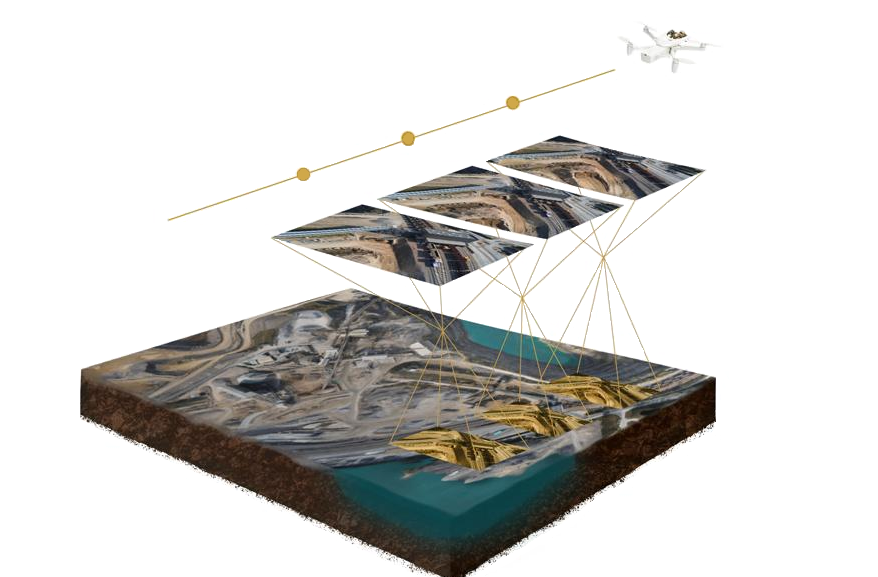
فتوگرامتری
عکاسی هوایی با هواپیماهای بدون سرنشین شیوه بازرسی و نقشه برداری متخصصان را تغییر می دهد. روش های فتوگرامتری برای پردازش تصاویر جمع آوری شده توسط پهپادها برای ایجاد مدل های دو بعدی و سه بعدی استفاده می شود ، که بعداً به مشتریان امکان می دهد تعمیر و نگهداری اجسام مورد بررسی را به موقع برنامه ریزی کنند.
4G قابلیت اطمینان بی سابقه پیوند داده های هواپیماهای بدون سرنشین را فراهم می کند. کاربران می توانند بدون ترس از قطع ارتباط ، پهپادها را در مناطق وسیعی ، در نزدیکی سازه های فلزی ، ساختمانها کار کنند.
بازرسی و نقشه برداری
با ترکیب هوش مصنوعی هواپیمای بدون سرنشین ANAFI Ai با پلت فرم آنلاین PIX4Dinspect ، کاربران قادر خواهند بود بازرسی ها سریعتر و م efficientثرتر از همیشه. یا. الگوریتم های یادگیری ماشین آنتن های برج های سلولی را تشخیص داده ، اندازه ، ارتفاع ، شیب ، آزیموت و عمودی آنها را تعیین می کند.
برای مشاهده مدلهای نمایشی سه بعدی تولید شده توسط ANAFI Ai روی تصاویر زیر کلیک کنید.
مثال # 1

مثال # 2
بهترین ماتریس در کلاس
دوربین هواپیمای بدون سرنشین ANAFI Ai مجهز به سنسور CMOS 48 مگاپیکسلی 1/2 اینچی است که با استفاده از فناوری فیلتر رنگی Quad Bayer ساخته شده است و برای بازرسی و فتوگرامتری از همیشه مناسب تر است.ماتریس مورد استفاده به شما امکان می دهد تصاویر دقیق با دامنه دینامیکی وسیع به دست آورید.
عکس های با وضوح بالا
ANAFI Ai قادر به تولید عکس های ثابت 48 مگاپیکسلی است ، بنابراین تمام جزئیات را با وضوح بالا ثبت کرده و یک ابر نقطه ای با چگالی بالا ایجاد می کند.
وضوح قابل توجه
مأموریت های بازرسی به توانایی شناسایی جزئیات جزئی مانند شماره سریال ، اتصالات ، لکه های زنگ و ترک های اولیه نیاز دارد.
محدوده دینامیکی وسیع
10 توقف محدوده دینامیکی در حالت استاندارد ، 14 توقف در حالت HDR. درجه بندی مطلوب تصویر برای ایجاد نقاط ابر ثابت و بازسازی دو بعدی یا سه بعدی با کیفیت بالا ضروری است.
55٪ جزئیات بیشتر از سنسورهای 1 اینچی
سنسور 48 مگاپیکسلی Quad Bayer 48 مگاپیکسلی هواپیمای بدون سرنشین ANAFI Ai نسبت به سنسورهای 20 اینچی 1 اینچی استفاده شده در تعدادی پهپادهای حرفه ای مدرن تصاویر زیر از بازرسی سقف ANAFI Ai و DJI Phantom 4 Pro V2.0 در همان ارتفاع به وضوح این واقعیت را نشان می دهد.

ایده آل برای بازرسی
گیمبال ANAFI Ai شامل یک سیستم تثبیت کننده ترکیبی 6 محوره (مکانیکی الکترونیکی) است که نوسانات پرواز را جبران کرده و وضوح تصویر را تضمین می کند. دوربین ANAFI Ai دارای محدوده قابل تنظیم از -90 تا 90 درجه است ، که آن را به وسیله ای ایده آل برای حمل و نقل هوایی برای مشاهده قسمت زیرین پایه پل تبدیل می کند.
شیب قابل کنترل ± 90 درجه
دقت
ANAFI Ai به کاربران امکان می دهد تا از ارتفاع 30 متری به GSD 0.46 سانتی متر بر پیکسل برسند ، که به معنی برنامه ریزی دقیق نسبی تا 0.92 سانتی متر است.
برای مقایسه ، در همان ارتفاع ، DJI Phantom 4 Pro V2 GSD فقط 0.82 سانتی متر در پیکسل را ارائه می دهد. به عبارت دیگر ، ANAFI Ai می تواند همان هدف را ترسیم کند ، بیش از 1.5 برابر بلندتر از فانتوم ، با سطح معادل جزئیات پرواز کند.
قابلیت های AI و 4G
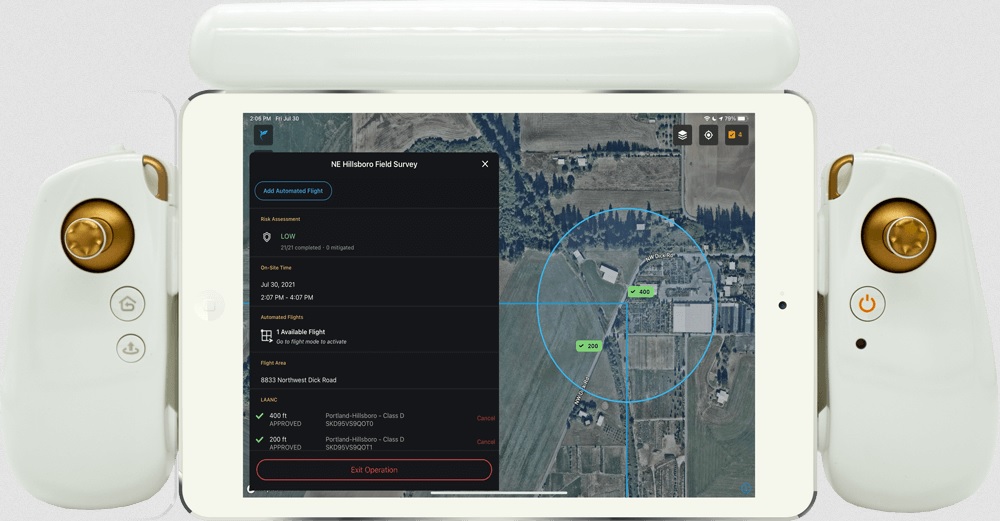
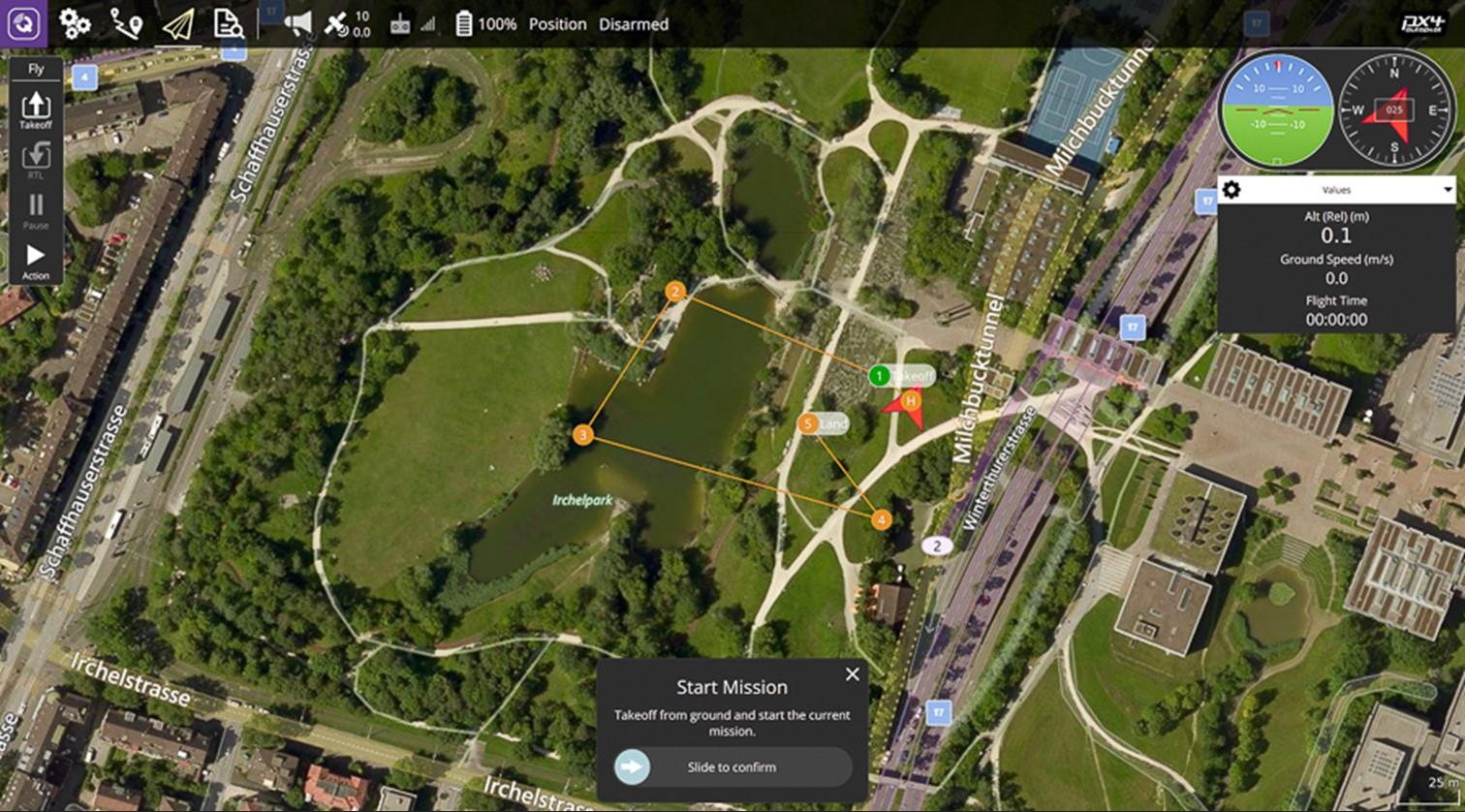
یک برنامه. هر گونه برنامه پرواز
پتانسیل برنامه موبایل FreeFlight 7 به کاربر اجازه می دهد تا تمام ماموریت های بررسی ، بازرسی و فتوگرامتری را اجرا کند.

حالتهای پرواز فتوگرامتری موجود
حالتهای پرواز فوتو متری زیر در برنامه موبایل FreeFlight 7 در حال حاضر موجود است:
- Grid
- Double-grid
- Сircular
ایجاد یک طرح پرواز با یک ضربه
یک ضربه روی نقشه تعاملی 3D FreeFlight تنها چیزی است که شما نیاز دارید برای اسکن سریع ساختمان هوش مصنوعی به طور خودکار پارامترها و مسیر مطلوب پرواز را تعیین می کند. تصاویر 48 مگاپیکسلی با ارجاع دقیق جغرافیایی سنسورهای ANAFI Ai (IMU ، GNSS و زمان پرواز) امکان بازسازی سه بعدی دقیق را فراهم می کند.
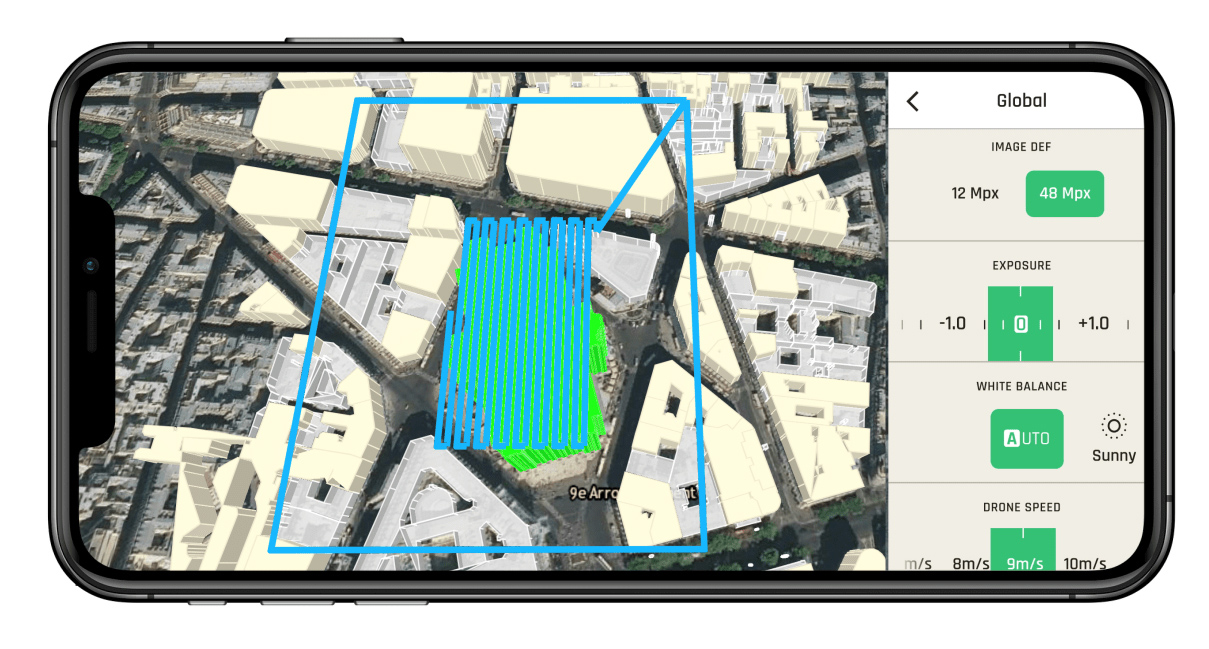 طرح پرواز خودکار با یک ضربه در ثبت سه بعدی زمین ثبت شده است.
طرح پرواز خودکار با یک ضربه در ثبت سه بعدی زمین ثبت شده است.
- زمینه نقشه کشی FreeFlight 7 از نرم افزار ArcGIS است. نمای ساختمان سه بعدی بر اساس داده های OpenStreetMap است که شهرهای سراسر جهان را پوشش می دهد.
- سیستم های تجسم ایمنی یک برنامه پرواز معین را تضمین می کند: کاربران نیازی به نگرانی در مورد موانع ندارند. ANAFI Ai به طور خودکار از آنها اجتناب می کند.
پرواز خودکار
سیستم حسگر همه جانبه ANAFI Ai ، بر اساس دید کلیشه ای ، به طور خودکار در جهت سفر جهت گیری می کند.

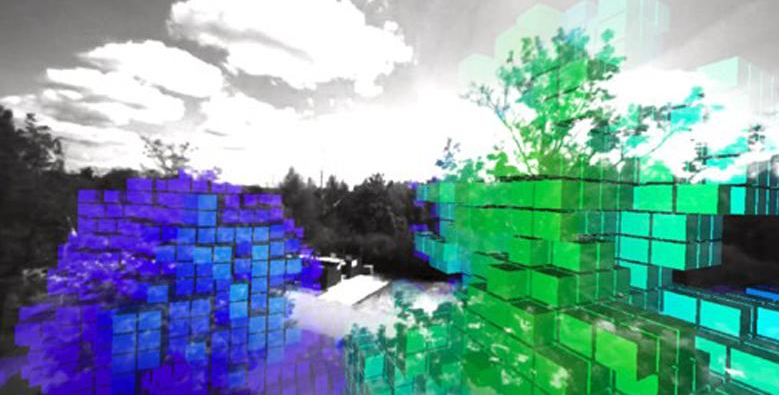
این هواپیمای بدون سرنشین موانعی را که در 30 متری ما قرار دارد تشخیص می دهد. فناوری هوش مصنوعی در حین اجرای یک برنامه پرواز مشخص ، دائماً شبکه پر کننده را ایجاد و به روز می کند. این نشان دهنده محیط هواپیمای بدون سرنشین در voxels است.
الگوریتم ها بهترین مسیر را برای جلوگیری از برخورد با موانع تعیین می کنند ، در حالی که هواپیمای بدون سرنشین روی هدف خود تمرکز می کند: ماموریت پروازی تعیین شده.

اتصال 4G
ANAFI Ai اولین میکرو درون تجاری است که مجهز به ماژول 4G است. بیش از 98 درصد فرکانس های مورد استفاده در سراسر جهان را پوشش می دهد.

بررسی خطوط برق فشار قوی. با ANAFI Ai ضبط شده است ، ویرایش شده با Pix4Dmatic. اندازه صحنه: 4060 × 60 × 70 متر تعداد تصاویر: 2172. GSD: 1.3 سانتی متر / پیکسل. ارتفاع: 90 متر همپوشانی جلو / پهلو: 90٪ / 65٪.
این هواپیمای بدون سرنشین قادر است به طور یکپارچه از Wi-Fi به 4G تغییر کند و بالعکس ، بنابراین مطمئن ترین اتصال را فراهم می کند ، که به نوبه خود تضمین می کند:
- توانایی انجام پروازهای BVLOS
- اتصال پایدار حتی هنگام پرواز در محیطهای دارای موانع و ساختمانها
- پرواز ایمن در محیطهای با سر و صدای زیاد
- کیفیت پیوند ویدئویی 1080p @ 30 fps
- بارگذاری مستقیم تصاویر به سرورهای ابری

بهینه سازی زمان پرواز
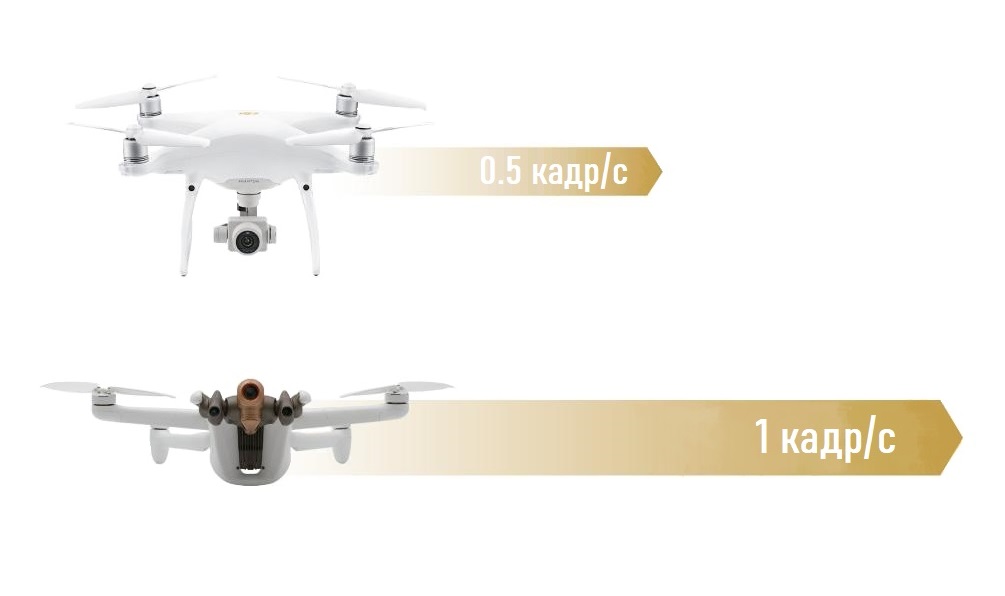
به گفته توسعه دهنده ، به دلیل بالا بودن صرفه جویی قابل توجهی در زمان انجام شده است. عملکرد تصویر ANAFI Ai:
- 48 مگاپیکسل به پهپاد اجازه می دهد بیش از 1.5 برابر بلندتر از هواپیماهای بدون سرنشین با سنسورهای 20 اینچی 1 اینچی پرواز کند ، در حالی که GSD یکسانی را به دست آورد. به عبارت دیگر ، ارتفاع بیشتر و ماموریت سریعتر دست به دست هم می دهند.
- 1 فریم در ثانیه: ANAFI Ai دو برابر سریعتر از Autel EVO 2 و DJI Phantom 4 Pro V2.0 عکس می گیرد.
انتقال 4G در پرواز به PIX4Dcloud
در روند ایجاد یک مدل دیجیتال از عکس های هوایی یک هواپیمای بدون سرنشین ، انتقال فایل ها و پردازش عکسها دو کار زمانبر هستند ANAFI Ai به کاربران کمک می کند تا گردش کار خود را سرعت بخشند. به طور خاص ، سیستم هواپیماهای بدون سرنشین اجازه می دهد:
- انتقال تصاویر به سرورهای مستقیم در پرواز با استفاده از اتصال 4G هواپیمای بدون سرنشین.
- بلافاصله شروع به محاسبه اجسام در پایان پرواز کنید: ارتوموسیک ، ابر نقطه ای ، مدل های ارتفاعی و مش بافت.
- به راحتی نقشه های دو بعدی را به اشتراک بگذارید و مدلهای سه بعدی با کیفیت را با کارکنان و مشتریان بررسی کنید.
![]()
PIX4D Suite Compatibility
ANAFI Ai اکنون با مجموعه ای منحصر به فرد از برنامه های عکاسی موبایل ، رومیزی و ابر متشکل از:
فتوگرامتری یا لیدار
چرا فتوگرامتری را برای بررسی ها و بازرسی ها انتخاب می کنیم؟ عکاسی فتوگرامتری هوایی علاوه بر دسترسی و سهولت استفاده ، در مواقع نیاز به تفسیر بصری داده ها ، بهترین انتخاب است.
مزایای فوتوگرامتری
- تجسم های متعددی را ارائه می دهد: ارتوموسی ، ابر نقطه رنگی ، مش بافت.
- ابری از نقاط با چگالی بیشتر ایجاد می کند که هر یک حاوی مقدار قابل توجهی اطلاعات (ارتفاع ، بافت ، رنگ) است.
- در دقت رندرهای دو بعدی و سه بعدی از LIDAR پیشی می گیرد - LIDAR سطح بالایی از جزئیات زمینه ای را ارائه نمی دهد.
معایب LIDAR
- 100 برابر بیشتر از یک پهپاد با ماتریس RGB هزینه دارد.
- پیچیدگی پردازش داده ها و خطاهای احتمالی در تفسیر.
- افزودن اطلاعات رنگی ممکن است ، اما این روند را پیچیده می کند.
- LIDAR فقط ابر نقطه ای ایجاد می کند و برای موارد و موقعیت های خاص در نظر گرفته شده است.
SDK
کیت توسعه نرم افزار Parrot مجموعه ای از ابزارها و نرم افزارهای منبع باز برای توسعه دهندگان است. از زمان ایجاد اولین هواپیمای بدون سرنشین A. R. Drone ، نرم افزار منبع باز این شرکت ، بسترهای توسعه دهنده ابزارها را پشتیبانی می کند و Parrot
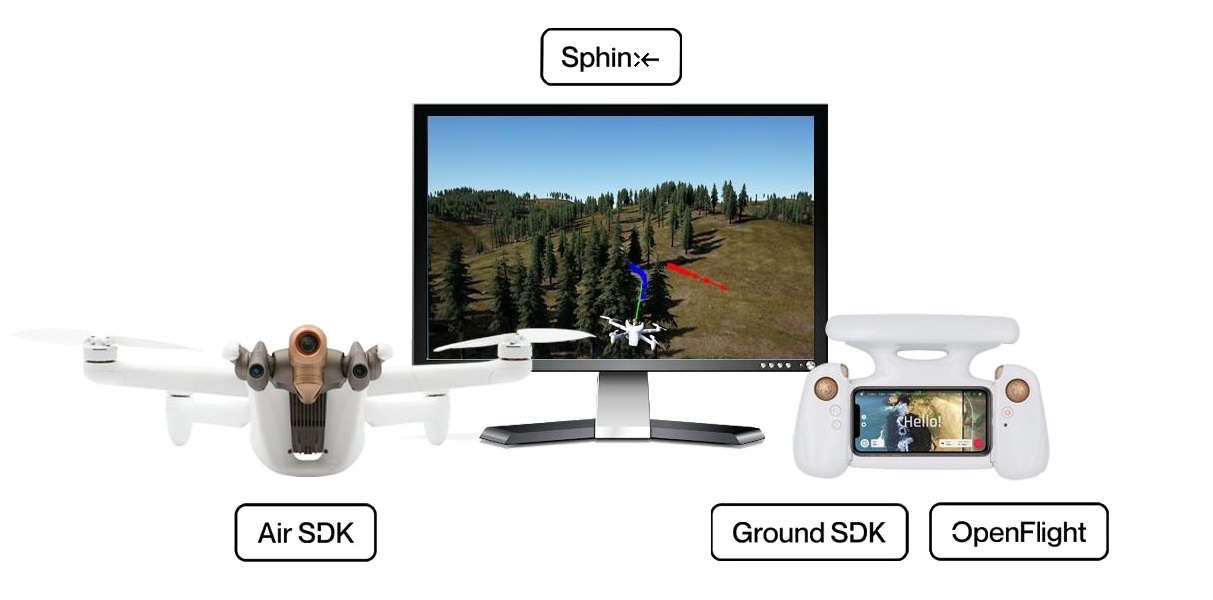
توسعه دهنده توضیح می دهد که همه منابع SDK شرکت به صورت رایگان ، بدون ثبت نام و پیگیری ، در پورتال موجود است " طوطی پورتال توسعه دهندگان"... همچنین می توانید به هزاران توسعه دهنده در انجمن طوطی بپیوندید ، جایی که می توانید موضوعات جاری را مستقیماً با مهندسان شرکت مورد بحث قرار دهید.
Air SDK
کد خود را در ANAFI Ai اجرا کنید
Air SDK معماری فناوری انقلابی را برای بارگیری و اجرای کد ارائه می دهد مستقیماً در ANAFI Ai. توسعه دهندگان می توانند ماموریت های پرواز سفارشی طراحی شده با دسترسی به همه سنسورهای هواپیماهای بدون سرنشین ، رابط های اتصال و عملکردهای خلبان خودکار را برنامه ریزی کنند.
Air SDK دسترسی داخلی به:
- همه سنسورها (IMU ، GPS ، TOF) و حالت های پرواز
- جریان و فراداده ویدیویی را فراهم می کند با تمام دوربین ها
- رابط های ارتباطی Wi-Fi ، 4G ، USB
- نقشه های عمق و شبکه های پر کننده
- ایجاد مسیر اجتناب از موانع
هر توسعه دهنده می تواند:
- با ایجاد ماموریت های پرواز وضعیت هواپیمای بدون سرنشین را تغییر دهد
- حالت ناوبری را تغییر دهد
- فرآیندهای جاسازی شده لینوکس (برای به عنوان مثال ، انتقال داده ها از طریق کانال 4G یا استفاده از بینایی رایانه)
Air SDK از زبان برنامه نویسی C یا پایتون پشتیبانی می کند. Air SDK همراه با راهنمای نصب دقیق و مستندات API ارائه می شود. نمونه های کاربردی بسیاری همه امکانات ارائه شده توسط معماری منحصر به فرد آن را نشان می دهند.
SDK زمینی
ساخت یک برنامه موبایل قدرتمند
Ground SDK یک پلت فرم نرم افزاری ایستگاه کنترل زمینی (GCS) است برای دستگاه های تلفن همراه (iOS و Android پشتیبانی می شوند). این به هر توسعه دهنده اجازه می دهد تا یک برنامه تلفن همراه برای ANAFI Ai برای کنترل بعدی هواپیمای بدون سرنشین به طور مستقیم از طریق دستگاه تلفن همراه ایجاد کند. همه عملکردهای BVS (کنترل ، فیلم ، تنظیمات) از طریق یک API آسان برای استفاده و کاملاً مستند در دسترس هستند.
OpenFlight
ایستگاه کنترل منبع زمینی منبع باز
برای اولین بار ، Parrot کد منبع برنامه ایستگاه کنترل زمینی خود را باز می کند. OpenFlight هسته اصلی برنامه آزاد منبع آزاد معروف 7 ما است. این به توسعه دهندگان اجازه می دهد تا بر افزودن قابلیت های خود تمرکز کنند و بلافاصله یک برنامه حرفه ای را برای انتشار در AppStore آماده کنند.

OpenFlight شامل:
- همه UX FreeFlight 7
- همه تنظیمات رابط
- کد تجسم سه بعدی موانع در زمان واقعی
- کد مدیریت ارتباطات 4G
- OpenFlight تحت مجوز BSD-3 با راهنمای نصب کامل و مستندات جامع منتشر شده است.
Sphinx
3D Photorealistic Simulation
Parrot Sphinx یک ابزار شبیه سازی پیشرفته هواپیماهای بدون سرنشین است. مهندسان طوطی از آن برای توسعه و آزمایش تمام ویژگی های ANAFI Ai استفاده می کنند. مفهوم کلی شبیه سازی سیستم عامل واقعی هواپیمای بدون سرنشین با تمام حسگرهای آن در یک محیط بصری و فیزیکی واقعی است.

طوطی ابوالهول اجازه می دهد:
- شبیه سازی تمام دوربین ها و حسگرها
- شبیه سازی نقشه های عمق و تقسیم بندی تصاویر
- حرکت در بسیاری از صحنه های سه بعدی واقع بینانه
- اتصال به انواع مختلف کنترل از راه دور
- استفاده از اسکریپت ها برای کنترل شبیه سازی
- افزودن عابران پیاده و وسایل نقلیه
- تجسم و ثبت اطلاعات پرواز
- تنظیم سنسورهای هواپیما و عناصر فیزیکی اطراف
- کنترل ضریب زمان واقعی
طوطی ابوالهول بر اساس استاندارد پیشرفته ساخته شده است اجزا:
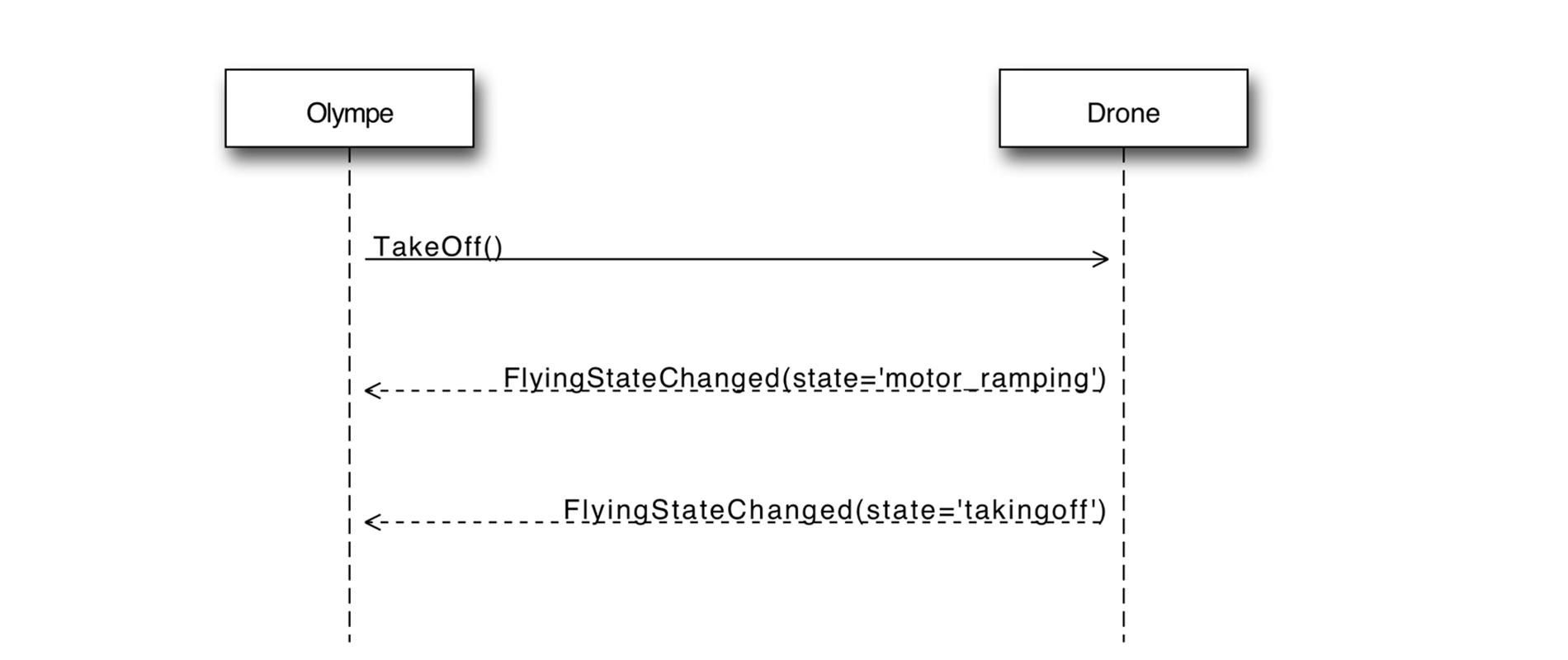
Olympe
پایتون برای کنترل ANAFI Ai
Olympe یک رابط برنامه نویسی کنترل کننده پایتون را برای ANAFI ارائه می دهد آی. هدف اصلی Olympe تعامل با محیط مدل سازی Sphinx بود. Olympe همچنین می تواند ANAFI Ai فیزیکی را از طریق رایانه از راه دور کنترل کند.
چارچوب Olympe اجازه می دهد:
- اتصال به ANAFI Ai شبیه سازی شده یا فیزیکی
- ارسال پیام های فرمان (خلبانی ، جهت گیری دوربین ، بازگشت به خانه ، برنامه پرواز)
- شروع و توقف پخش ویدئو از همه دوربین ها
- ضبط جریان ویدئویی و فراداده های همزمان (984]
) PdrAW
Advanced Media Player
PDrAW یک نمایشگر ویدیوی پیشرفته برای رسانه ANAFI Ai است. بیننده از جریان (RTP / RTSP) و فیلم ضبط شده (MP4) در سیستم عامل های Linux ، macOS ، Android و iOS پشتیبانی می کند. PDrAW به عنوان یک کتابخانه (libpdraw) ، یک کتابخانه wrapper (libpdraw-backend) و یک فایل اجرایی مستقل (pdraw) ارائه می شود.
PDrAW همچنین فراداده های ویدئویی را مدیریت می کند. در ANAFI Ai ، ویدئوی پخش شده و ضبط شده شامل فراداده هایی است که به صورت عمومی در دسترس و مستند است و امکان پردازش پیشرفته فیلم های هوایی را فراهم می کند.
مدلهای C. A. D.
Parrot مدلهای سه بعدی هواپیماهای بدون سرنشین خود را برای ادغام در طراحی CAD شما برای نمونه سازی سریع و ادغام لوازم جانبی ارائه می دهد.
MAVLink و GUTMA سازگاری
ANAFI Ai با پروتکل استاندارد منبع باز MAVLink v1 سازگار است ، که امکان تبادل داده در زمان واقعی بین UAV و ایستگاه کنترل را فراهم می کند. ANAFI Ai را می توان به صورت دستی یا با استفاده از برنامه ریزی پرواز اتوماتیک از ایستگاه پایه سازگار با MAVLink مانند QGroundControl کنترل کرد.
* رابط QGroundControl
ANAFI Ai با پروتکل استاندارد داده های پروازی استاندارد منبع باز GUTMA سازگار است. انجمن جهانی UTM کنسرسیومی از بازیگران اصلی در زمینه کنترل ترافیک هوایی است.

بزرگترین اکوسیستم شریک برای هواپیماهای بدون سرنشین طوطی
Parrot به توسعه اکوسیستم جهانی ارائه دهندگان نرم افزار برای هواپیماهای بدون سرنشین از طریق برنامه SDK شریک خود ادامه می دهد ارائه راه حل های تخصصی و منحصر به فرد برای نیازهای رو به رشد و تکامل کاربران حرفه ای.
طوطی برای هر نوع نیاز تجاری
برای استفاده بیشتر از فرآیند بازرسی ، Parrot به مشتریان خود اکوسیستمی از نرم افزارهای هواپیماهای بدون سرنشین سازگار اعم از مدیریت ناوگان ، پرواز گردآوری ارائه می دهد. برنامه ریزی و وارد کردن سیاهههای مربوط به پرواز ، قبل از تصویربرداری ، نقشه برداری ، نظارت و تجزیه و تحلیل داده های دریافتی.
PIX4D × طوطی
برنامه های کاربردی مدل سازی دو بعدی / سه بعدی. مجموعه ای منحصر به فرد از برنامه های فتوگرامتری موبایل ، رومیزی و ابر.
Verizon x Skyward x Parrot
راه حل بدون سرنشین 4G LTE در ایالات متحده. اولین هواپیمای بدون سرنشین رباتیک ANAFI Ai در نوع خود به شبکه Verizon 4G LTE با نرم افزار از پیش نصب شده Skyward متصل شد. در را برای انتقال داده های نزدیک به زمان واقعی ، استقرار از راه دور و پروازهای خارج از خط دید باز می کند.

Skyward × Parrot
ادغام و یادگیری در ظرفیت ANAFI. پلت فرم مدیریت حمل و نقل هوایی شامل حریم هوایی ، دسترسی LAANC و آموزش ، تجهیزات و اتصالات برای استقرار ناوگان هواپیماهای بدون سرنشین سازمانی.

DroneSense × Parrot
برنامه های هواپیماهای بدون سرنشین خود را بسازید ، مدیریت و مقیاس بندی کنید. متخصصان وسایل نقلیه هوایی بدون سرنشین در بخش ایمنی عمومی می توانند از مجموعه کامل قابلیت های DroneSense استفاده کنند که مخصوص نیازهای پاسخ دهندگان اولیه طراحی شده است.

Parrot Ecosystem Partners

Parrot Affiliate Program
توسعه دهنده پیشنهاد گسترش قابلیت های برنامه خود برای هواپیماهای بدون سرنشین با ادغام SDK آنها.
امنیت سایبری
محرمانه بودن اطلاعات
توسعه دهنده توجه می کند که وی جمع آوری نمی کند هر گونه داده بدون رضایت کاربران. تصمیم در مورد انتقال یا عدم انتقال داده ها به زیرساخت Parrot تنها با خود کاربران است. داده های میزبانی شده در Parrot به کاربر اجازه می دهد تا داده های پرواز و برنامه های پرواز را بین دستگاه های مختلف همگام سازی کند ، همچنین پشتیبانی را تسهیل کرده و Parrot را قادر می سازد تا محصولات خود را بهبود بخشد.
ANAFI Ai مطابق با مقررات عمومی حفاظت از داده های اتحادیه اروپا (GDPR) است و فراتر می رود ، به عنوان مثال ، به شما امکان می دهد تمام داده ها را با یک کلیک حذف کنید ، در نتیجه راحت ترین کنترل را در اختیار کاربران قرار دهید.این مشکل با یک کلیک در برنامه تلفن همراه FreeFlight7 یا در تنظیمات حریم خصوصی حساب Parrot. Cloud حل می شود. بنابراین ، کاربران در هر زمان نه تنها می توانند مبادله داده ها را متوقف کنند ، بلکه به راحتی درخواست حذف آنها را می کنند.
در صورت رضایت کاربر مبادله داده ها ، پردازش آنها در قالب کاملاً شفاف انجام می شود ، که در سیاست حفظ حریم طوطی به تفصیل شرح داده شده است.
وقتی ANAFI Ai از طریق 4G به Skycontroller 4 متصل می شود ، از زیرساخت Parrot برای جفت شدن هواپیمای بدون سرنشین و کنترل از راه دور استفاده می شود. اگر کاربر به حساب Parrot. Cloud وارد نشده باشد ، همچنان می تواند از اتصال 4G با یک حساب موقت منحصر به فرد استفاده کند. هنگام استفاده از زیرساخت Parrot برای جفت شدن 4G ، فیلم با استفاده از کلید مورد توافق بین هواپیمای بدون سرنشین و کنترل از راه دور رمزگذاری می شود ، Parrot به ویدیوهای رمزگذاری نشده دسترسی ندارد.

سازگار با FIPS 140-2 و CC EAL5 Secure Element
ANAFI Ai دارای یک عنصر امنیتی Wisekey داخلی است که با NIST سازگار است FIPS140-2 سطح 3 و معیارهای مشترک EAL5 دارای مجوز. یک عنصر امنیتی مشابه نیز در سخت افزار کنترل Skycontroller 4 تعبیه شده است.
عملکرد عناصر امنیتی:
- عملیات رمزنگاری را انجام می دهد
- ذخیره و از اطلاعات محرمانه محافظت می کند
از کلید خصوصی ECDSA با پارامترهای دامنه P521 ، منحصر به فرد برای هر هواپیمای بدون سرنشین استفاده می کند. نمی توان آن را از عنصر امنیتی استخراج کرد. و گواهی مربوط به این کلید توسط یک مقام صدور گواهینامه امضا می شود.
Wisekey از یکپارچگی سیستم عامل محافظت می کند ، هویت پهپادی منحصر به فرد را برای جفت شدن 4G و احراز هویت قوی و امضای دیجیتالی منحصر به فرد عکس های گرفته شده توسط هواپیمای بدون سرنشین ارائه می دهد.

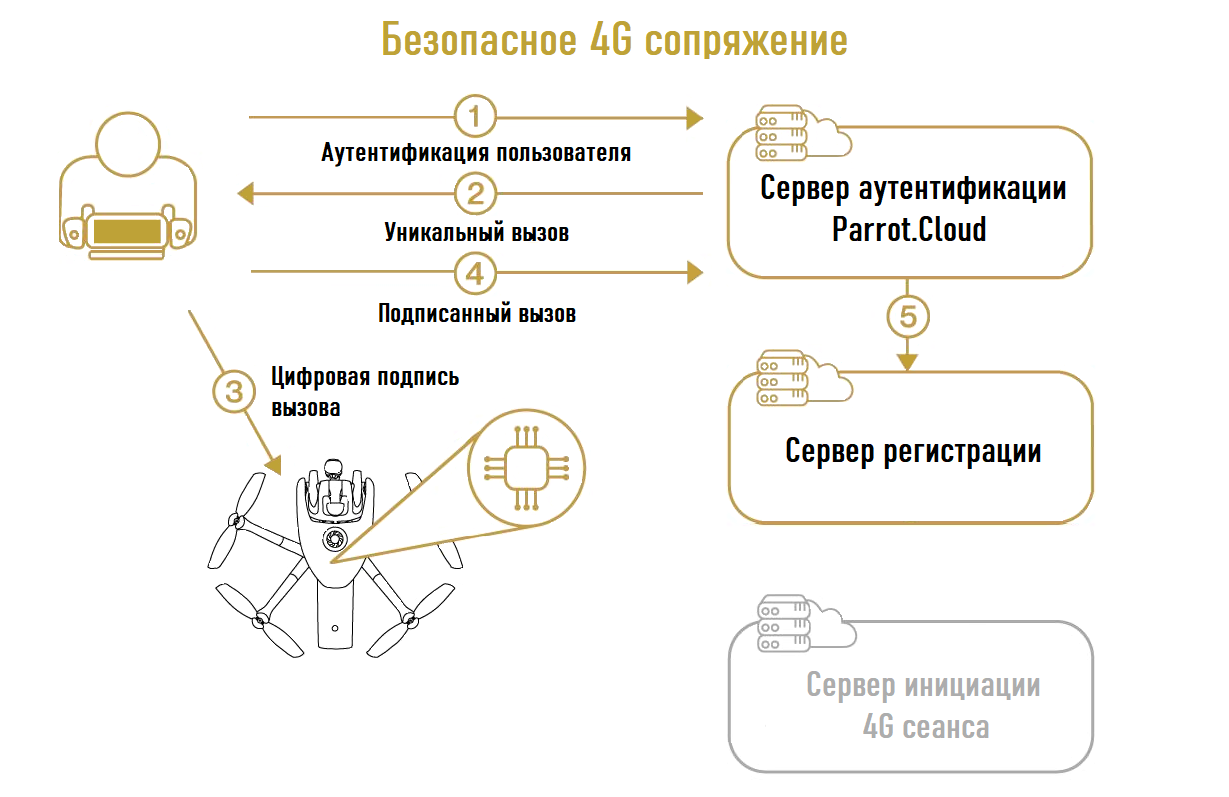
4G اتصال امن و احراز هویت قوی
روند جفت شدن ایمن دستگاه ها. در طی این فرایند ، کاربر به طور مطمئن تأیید می کند که به یک پهپاد خاص متصل است. به لطف ANAFI Ai Secure Element ، او می تواند این کار را بدون وارد کردن رمز عبور در داخل هواپیمای بدون سرنشین انجام دهد.
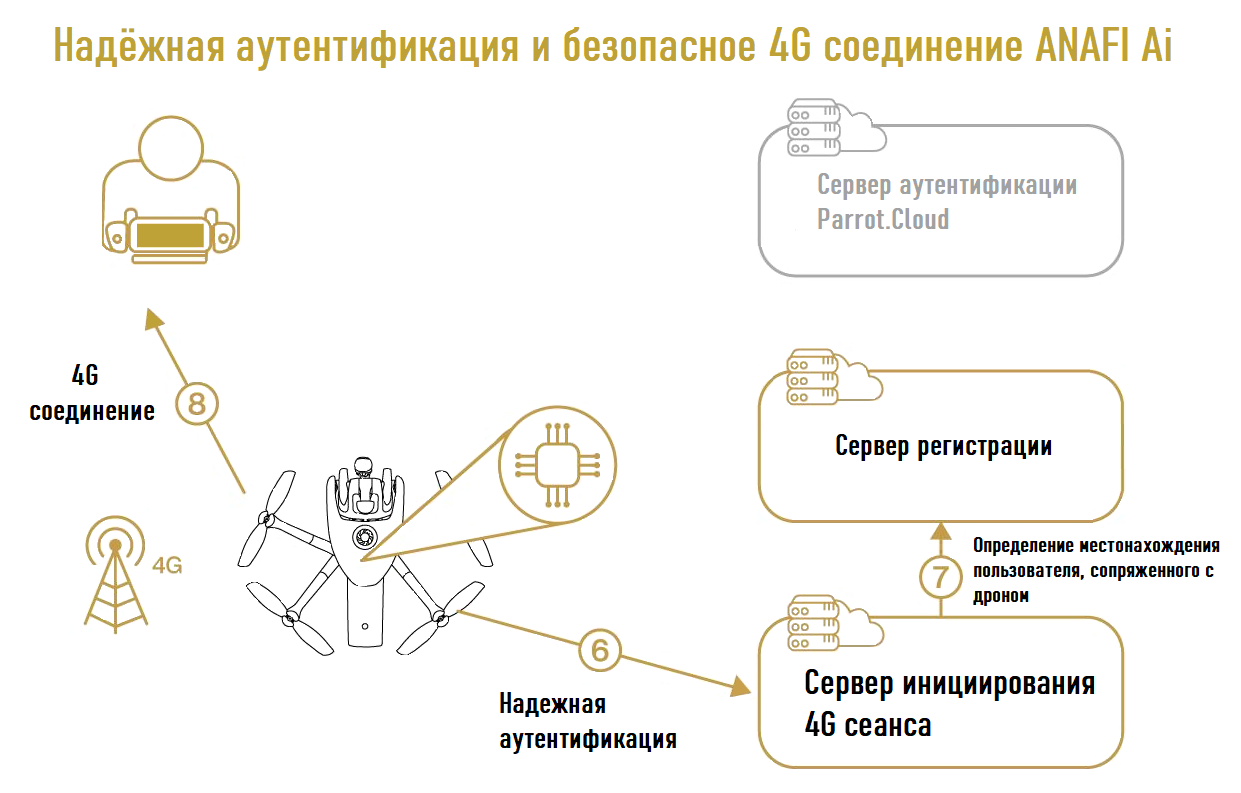
سرورهای طوطی سپس ارتباط بین کاربر و هواپیمای بدون سرنشین را ثبت می کنند. هنگامی که اتصال Wi-Fi بین کاربر و هواپیمای بدون سرنشین قطع می شود ، ANAFI Ai به طور خودکار به اتصال 4G تغییر می کند. ANAFI Ai با استفاده از کلید خصوصی ذخیره شده در عنصر امن ، احراز هویت قوی را روی سرورهای طوطی انجام می دهد. سرورهای طوطی به دنبال کاربران متصل هستند و رابط بین ANAFI Ai و Skycontroller 4 را ارائه می دهند.
برای محافظت از کنترل هواپیماهای بدون سرنشین و جریانهای ویدئویی که به Skycontroller 4 می آید ، ANAFI Ai از پروتکل های TLS ، DTLS و SRTP پشتیبانی می کند.
راه اندازی و به روز رسانی ایمن
دنباله بوت هواپیما محافظت می شود: سیستم بررسی می کند که از نرم افزار Parrot استفاده می کند و این نرم افزار دستکاری نشده است. یک بررسی امنیتی در هر مقدار اولیه انجام می شود. سرویس به روز رسانی همچنین امضای دیجیتالی به روز رسانی نرم افزار را کنترل می کند.
راه اندازی کلیدهای کاربر در عنصر امن
کاربران ANAFI Ai به حساب اپراتور ویژه Secure Element دسترسی دارند. این حساب برای راه اندازی کلیدهای مربوط به این کاربر استفاده می شود. کاربران می توانند عنصر امن را با کلیدهای عمومی ارائه دهندگان ماموریتی که به آنها اعتماد دارند پیکربندی کنند. ANAFI Ai فقط ماموریت هایی را انجام می دهد که با این کلیدها امضا شده اند. این فرایند مانع از انجام مأموریت های مخرب پرواز بر روی هواپیمای بدون سرنشین توسط مهاجمان می شود.
عکسهای با امضای دیجیتالی
عنصر امن ANAFI Ai می تواند تصاویر پهپادی را به صورت دیجیتالی امضا کند. این امضا ثابت می کند که:
- تصویر امضا شده توسط هواپیمای بدون سرنشین مشخص شده گرفته شده است.
- نه خود تصویر و نه فراداده های آن پردازش نشده اند (داوطلبانه یا غیر داوطلبانه) - فوق داده ، که به EXIF و XMP نیز معروف است ، حاوی اطلاعاتی در مورد تاریخ ، زمان و مکان تصویر است.

به عبارت دیگر ، امضای دیجیتالی از تمام داده های مربوط به تصویر ، از جمله مکان و زمان عکسبرداری و پهپاد ANAFI Ai محافظت می کند.
کاربران و شرکای ارائه دهنده راه حل های نرم افزاری با استفاده از عکسبرداری با هواپیماهای بدون سرنشین می توانند امضای دیجیتالی عکس های ANAFI Ai را با گواهی پهپاد یا از طریق کاتالوگ کلید عمومی ارائه شده توسط Parrot تأیید کنند.
شفافیت و بررسی های مداوم امنیتی با Bug bounty
Parrot در صورت امکان از پروتکل های استاندارد و فرمت های فایل استفاده می کند. هیچ کد مبهم یا ویژگی های پنهان وجود ندارد. این به کاربر امکان می دهد نحوه عملکرد محصولات طوطی را بفهمد و ایمنی آنها را آزمایش کند. علاوه بر این ، OpenFlight ، نرم افزاری که برای کنترل پهپاد استفاده می شود ، منبع باز است و کنترل کاملی را در اختیار کاربران قرار می دهد.
در آوریل 2021 ، Parrot برنامه Bug Bounty را با YesWeHack ، اولین پلت فرم امنیتی جمع آوری شده در اروپا ، راه اندازی کرد. از طریق این مشارکت ، Parrot از جامعه تحقیقاتی گسترده YesWeHack در زمینه امنیت سایبری برای شناسایی آسیب پذیری های احتمالی در هواپیماهای بدون سرنشین ، برنامه های تلفن همراه و خدمات وب استفاده می کند.
برنامه Bug Bounty شامل دو مرحله است:
برنامه های خصوصی در ابتدا دسترسی انحصاری به پژوهشگران امنیتی انتخاب شده را شامل می شود و شامل مدل های آینده هواپیماهای بدون سرنشین Parrot می شود.تجربه و مهارتهای متنوع محققان ، سطح بالای امنیت محصولات را قبل از ورود به بازار تأیید می کند ، که به ارتقاء ایمنی کاربران طوطی و حفاظت از داده های آنها کمک می کند.
پس از اولین دور برنامه خصوصی Bug Bounty و پس از تجاری سازی ، محصولات وارد برنامه عمومی می شوند. سپس امنیت کل آنها توسط کل جامعه YesWeHack متشکل از 22000 محقق امنیت سایبری به شدت مورد بررسی قرار می گیرد.

مدیریت داده ها
Parrot Cloud به کاربرانی امکان می دهد که داده های خود را برای مدیریت داده های پرواز و ناوگان و همچنین چند رسانه ای به اشتراک بگذارند. اطلاعات دریافت شده توسط هواپیماهای بدون سرنشین آنها
داده های جمع آوری شده
ابر طوطی 4 نوع داده جمع آوری می کند:
استاتیک (داده های محصول):
- هواپیما شماره سریال
- شماره سریال باتری
- نسخه سیستم عامل هواپیما و باتری
- نسخه سخت افزاری هواپیما و باتری
- مدل دستگاه
- FreeFlight 7 Release نسخه
رویدادها
- هشدارها: باتری ، خلبان خودکار ، سنسورها
- ارتباط: اتصال / قطع ارتباط ، شروع جریان ، هشدار تداخل ، سیگنال ضعیف
- دوربین: آمار جریان ، تنظیم تغییرات
- پرواز: تغییر حالت (برخاست ، فرود ، شناور ، و غیره) ، فعال سازی یک کار پرواز (طرح پرواز ، فتوگرامتری)
"تصاویر زمینه ای"
- Timelapse- عکس فوری و (هر 2 دقیقه یک بار)
- یادگیری عمیق (نقشه برداری از اشیاء بیشتر ، مناظر برای بهبود استقلال پرواز ، ردیابی ، جلوگیری از موانع)
- Stereovision (نقشه عمق)
- تصاویر فعال شده توسط رویداد
- شروع و پایان اظهارات شناور دقیق ، فرود دقیق
- سقوط هواپیمای بدون سرنشین
- صورتها به طور خودکار در هنگام انتقال تار می شوند
تله متری
استفاده نهایی از داده های جمع آوری شده
طوطی فقط داده هایی را از مشتریانی جمع آوری و استفاده می کند که موافقت کرده اند تا آن را به منظور بهبود کیفیت به اشتراک بگذارند از محصولات آن...
مدیریت تعمیر و نگهداری
نگهداری پیشگیرانه: ابزارهای ما تمام اطلاعات مربوط به مأموریت ها (نوع ماموریت ، زمان برخاست و فرود ، تعداد ماموریت ها ، موقعیت هواپیمای بدون سرنشین ، سرعت پرواز ،) را جمع آوری می کند. برنامه پرواز و تنظیمات AirSDK). این به شما امکان می دهد اطلاعات دقیقی در مورد وضعیت ناوگان هواپیماهای بدون سرنشین ANAFI Ai (و همچنین کنترل کننده ها و باتری های آنها) در زمان واقعی دریافت کنید.
تعمیر و نگهداری اصلاحی: اطلاعات جمع آوری شده برای تعیین سریع وضعیت یک هواپیمای بدون سرنشین یا باتری مفید است.
افزایش هوش مصنوعی (AI)
عناصر هوش مصنوعی ANAFI Ai (PeleeNet ، شبکه های پیچشی و غیره) خدمات و ویژگی های بی نظیری را به کاربران ارائه می دهد: اجتناب از موانع ، ردیابی هدف ، چندین حالت پرواز. کیفیت هوش مصنوعی به کمیت و کیفیت داده های جمع آوری شده (تصاویر و فیلم ها) بستگی دارد: این داده ها یادگیری ماشین را تغذیه می کند. از این نظر ، کیفیت داده ها تنها عنصر تعیین کننده نیست: فراداده های مرتبط با این داده ها نیز اساسی هستند. به همین دلیل ، ابزار ما تصاویر و فراداده را به طور منظم و بسته به رویدادها ، در مجموع 30 تا 50 مگابایت در دقیقه جمع آوری می کند.
ویژگی های پرواز
ویژگی های آیرودینامیکی
رانندگی و آیرودینامیک
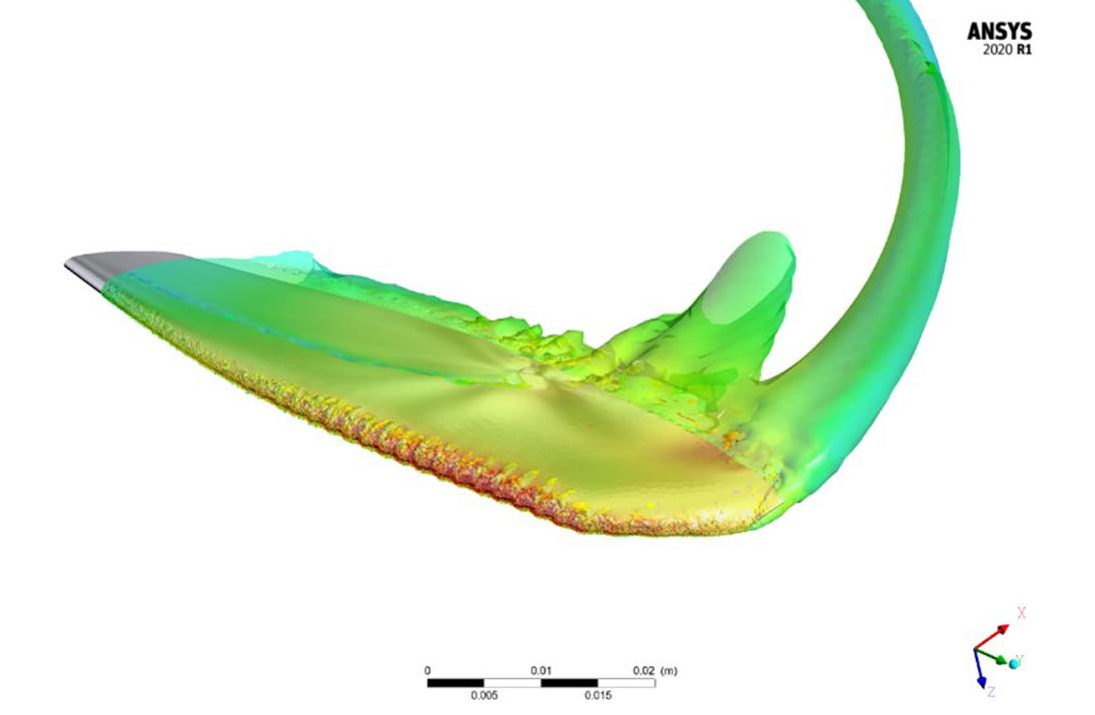 تصویر CFD از تیغه های پروانه ANAFI Ai
تصویر CFD از تیغه های پروانه ANAFI Ai
تیغه های پروانه جدید زیست تقلبی با یک نهنگ لبه جلویی شبیه قوز مانند. این رویکرد امکان افزایش راندمان پیشرانه نیروگاه را فراهم کرد ، که در خروجی باعث افزایش رانش در همان سرعت چرخشی شد. این اثر با افزایش قطر روتور قابل مقایسه است.
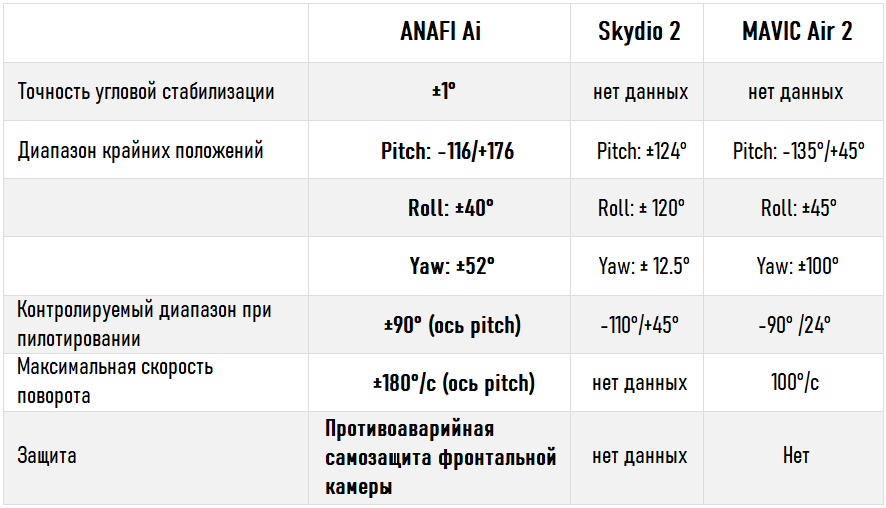
سر و صدای آکوستیک ، به ویژه سر و صدا ، که از لبه جلویی منتشر می شود نیز کاهش می یابد. بنابراین ANAFI Ai بی صدا [71.5 دسی بل SPL (A) در 1 متر] از Skydio 2 [76.4 دسی بل SPL (A) در 1 متر].
- مدت زمان پرواز بیش از 32 دقیقه
- به لطف ویژگی های آیرودینامیکی بهینه شده بدنه و پیشرانه ANAFI Ai ، حداکثر سرعت در پرواز رو به جلو 61 کیلومتر در ساعت است ، با پرواز جانبی و پرواز عقب 58 کیلومتر در ساعت
- حداکثر مقاومت باد 12.7 متر بر ثانیه
- به لطف راندمان گشتاور بالای موتور / پروانه و استقلال بالای باتری ، برد 22.5 کیلومتر است (با سرعت ثابت 50 کیلومتر در ساعت در هوای آرام).
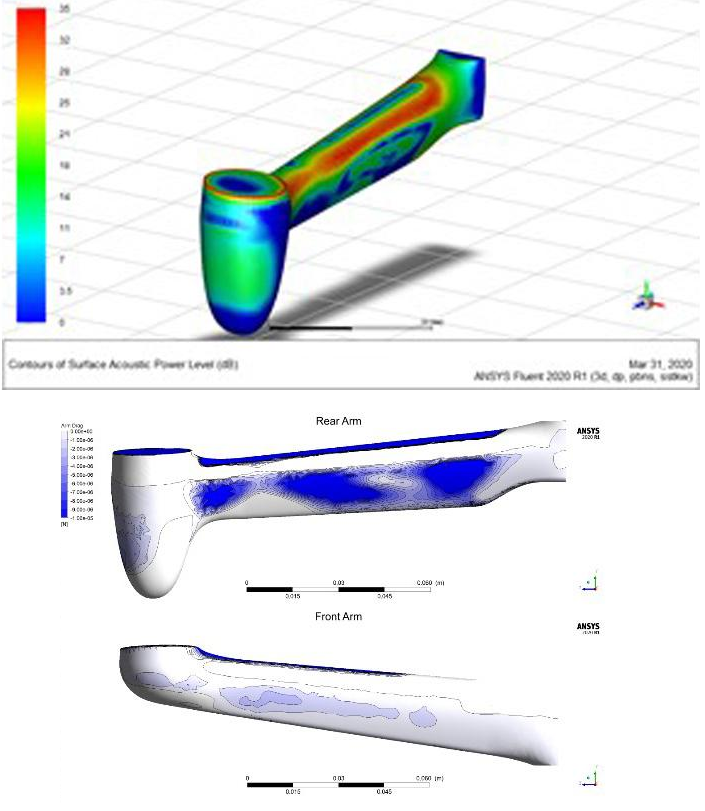 تصاویر CFD از تیرهای ANAFI Ai
تصاویر CFD از تیرهای ANAFI Ai
سنسورها
برای اطمینان از پرواز ایمن ANAFI Ai مجهز به:
- 2 × IMU (ICM-40609-D و ICM42605)
- Magnetometer LIS2MDL
- ماژول GPS UBX-M8030
- TI OPT3101 زمان پرواز (ToF)
- فشارسنج LPS22HB
- دوربین عمودی
مشخصات سنسور
IMU پرواز: ICM-40609-D
- ژیروسکوپ 3 محوره
- محدوده: ± 2000 درجه در ثانیه
- وضوح تصویر: 16.4 LSB / ° / ثانیه
- افست / دقت: ± 0.05 درجه در ثانیه (پس از کالیبراسیون حرارتی و دینامیکی)
- شتاب سنج سه محوره
- محدوده: ± 16 گرم
- وضوح: 2.048 LSB / mg
- افست / دقت: ± 0.5 میلی گرم (XY) ± 1 میلی گرم (Z) (پس از کالیبراسیون حرارتی و دینامیکی)
- کنترل دما s: سیستم گرمایش کنترل شده نسبت به دمای محیط ، تثبیت شده در: 15 0.15 درجه سانتی گراد
- فرکانس اندازه گیری: 2 کیلوهرتز
مغناطیس سنج: LIS2MDL
- محدوده:. 49.152G
- وضوح تصویر: 1.5 mG
- افست / دقت: 15 میلی گرم G (پس از جبران ، در حداکثر سرعت موتور)
- فرکانس اندازه گیری: 100 هرتز
فشارسنج: LPS22HB 1
- محدوده: 260 تا 1260 اسب بخار
- وضوح: 0.0002 hPa
- افست / دقت: ± 0.1 hPa
- کنترل دما: سیستم گرمایش کنترل شده نسبت به دمای محیط ، تثبیت شده در محدوده: 2 0.2 درجه سانتی گراد
- فرکانس اندازه گیری: 75 هرتز
- سر و صدا اندازه گیری: 20 سانتی متر RMS
GNSS: UBX-M8030 1
- آنتن سرامیکی وصله 25 × 25 × 4 میلی متر ، اجازه افزایش 2 دسی بل نسبت به ANAFI 1
- حساسیت: شروع سرد -148 دسی بل / ردیابی و ناوبری: -167 دسی بل بر متر
- زمان-تا-اولین-رفع: 40 ثانیه
- دقت / صحت: موقعیت (انحراف استاندارد 1.4 متر) ، سرعت (انحراف استاندارد 0.5 متر بر ثانیه)
دوربین عمودی
- سنسور تصویر قالب: 1/6 اینچ
- وضوح تصویر: 640 × 480 پیکسل
- سنسور تصویر با شاتر جهانی
- سیاه و سفید
- FOV: زاویه دید افقی: 53.7 درجه / زاویه دید عمودی: 41.5 درجه
- فاصله کانونی: 2.8 میلی متر
- اندازه گیری سرعت جریان نوری روی زمین در 60 هرتز
- 15 هرتز و تناسب دقیق @ 5Hz
ToF: TI OPT3101
- برد: 0-15 متر
- وضوح تصویر: 0.3 میلی متر
- دقت ب: cm 2 سانتی متر (پس از کالیبراسیون)
- فرکانس اندازه گیری: 64 هرتز
دوربین عمودی IMU: ICM-42605
- ) ژیروسکوپ 3 محوره
- محدوده: ± 2000 درجه بر ثانیه
- وضوح تصویر: 16.4 LSB / ° / ثانیه
- افست / دقت: ± 0.1 درجه در ثانیه (پس از پویا کالیبراسیون)
- شتاب سنج 3 محوری
- محدوده: 16 گرم ±
- وضوح تصویر: 2.048 LSB / mg
- افست / دقت: ± 2.0 میلی گرم (XY) 0 5.0 میلی گرم (Z) - پس از کالیبراسیون پویا
- فرکانس اندازه گیری: 1 کیلوهرتز
- همگام سازی سخت افزار با دوربین عمودی ، دقت: 1 میکرو ثانیه
خلبان خودکار
کنترل پرواز ANAFI Ai پرواز خلبان ساده و شهودی را ارائه می دهد: برای کار با آن نیازی به آموزش نیست.این به شما امکان می دهد بسیاری از حالت های پرواز (برنامه پرواز ، دوربین فیلمبرداری ، برخاست دستی ، RTH هوشمند) را خودکار کنید. الگوریتم های همجوشی سنسور داده ها را از همه سنسورها برای برآورد نسبت ANAFI Ai ، ارتفاع ، موقعیت و سرعت ترکیب می کند.
ارزیابی شرایط برای عملکرد مناسب هواپیماهای بدون سرنشین ضروری است. وقتی از کنترلر پرواز با یک حلقه باز استفاده می شود ، کوادکوپترها ذاتاً ناپایدار هستند. برای کنترل آسان آنها ، بدون ذکر کنترل خودکار ، لازم است که آنها را با استفاده از الگوریتم های کنترل حلقه بسته تثبیت کنید. این الگوریتم ها برای دستیابی به مسیرهای مورد نظر ، دستورات را به موتورهای مورد نیاز ANAFI Ai محاسبه و ارسال می کنند.

پرواز داخلی
در غیاب سیگنال GPS ، ANAFI Ai برای تخمین سرعت و موقعیت عمدتا به اندازه گیری دوربین عمودی متکی است. عملکرد دوربین عمودی با دو الگوریتم اصلی تعیین می شود:
- جریان نوری برای تخمین سرعت
- تشخیص نقاط کلیدی و تطبیق برای تخمین موقعیت
دوربین عمودی الگوریتم ها می توانند در شرایط کم نور به لطف ANAFI Ai مجهز به یک جفت چراغ LED در کنار دوربین عمودی کار کنند. آنها اجازه می دهند پهپاد ثابت بماند ، به ویژه هنگام پرواز در داخل خانه یا در غیاب GPS ، در ارتفاع کمتر از 5 متر از سطح زمین. قدرت چراغ های LED بسته به نیاز الگوریتم به طور خودکار سازگار می شود.
پرواز خودکار
ویژگی های کلیدی
- سیستم سنجش روتاری با میدان دید وسیع
- استخراج عمق فضای اطراف بر اساس تراز استریو و عمق با حرکت
- نمایش محیط در قالب یک شبکه پر کننده
- تشخیص خودکار و اجتناب از موانع در سرعت تا 29 کیلومتر در ساعت
این فصل جزئیات سنسورها ، سخت افزار و الگوریتم های مورد استفاده توسط ANAFI Ai برای فعال کردن پرواز خودکار را توضیح می دهد. این به شرح زیر سازماندهی شده است:
- شرح مفصل سیستم درک ANAFI Ai
- الگوریتم های ادراکی مورد استفاده برای بازسازی محیط سه بعدی اطراف هواپیماهای بدون سرنشین
- تغییر زمان و مانع اجتناب

استراتژی سیستم ادراک
درک محیط سه بعدی یک توانایی کلیدی برای دستیابی به پرواز مستقل است به خصوص در فضاهای محدود این یک پیش شرط برای تضمین تشخیص و اجتناب از موانع است که باعث کاهش بار اپراتور هواپیماهای بدون سرنشین ، افزایش موفقیت در ماموریت و تضمین ایمنی هواپیما می شود.
آشکارسازی تمام پتانسیل یک دوربین پرنده ، که می تواند آزادانه در هر جهتی بدون محدودیت حرکت کرده و بچرخد ، به یک راه حل حساس م effectiveثر نیاز دارد.به طور خاص ، سیستم حسگر باید بتواند اطلاعات مربوط به محیط را در جهت هایی که با حرکت رو به جلو در پرواز مطابقت دارد - صرف نظر از جهت دوربین ، دریافت کند.
ANAFI Ai برای جداسازی جهت دوربین اصلی و سیستم حسگر از یک راه حل فنی منحصر به فرد بر اساس دو گیمبال مکانیکی استفاده می کند:
- دوربین اصلی بر روی 3- نصب شده است. محور گیمبال ، جهت گیری سه بعدی مستقل از جهت پهپاد.
- سیستم سنجش روی یک گیمبال تک محوره نصب شده است - متصل به حرکت خم شدن هواپیمای بدون سرنشین ، می تواند در هر جهتی جهت گیری شود.
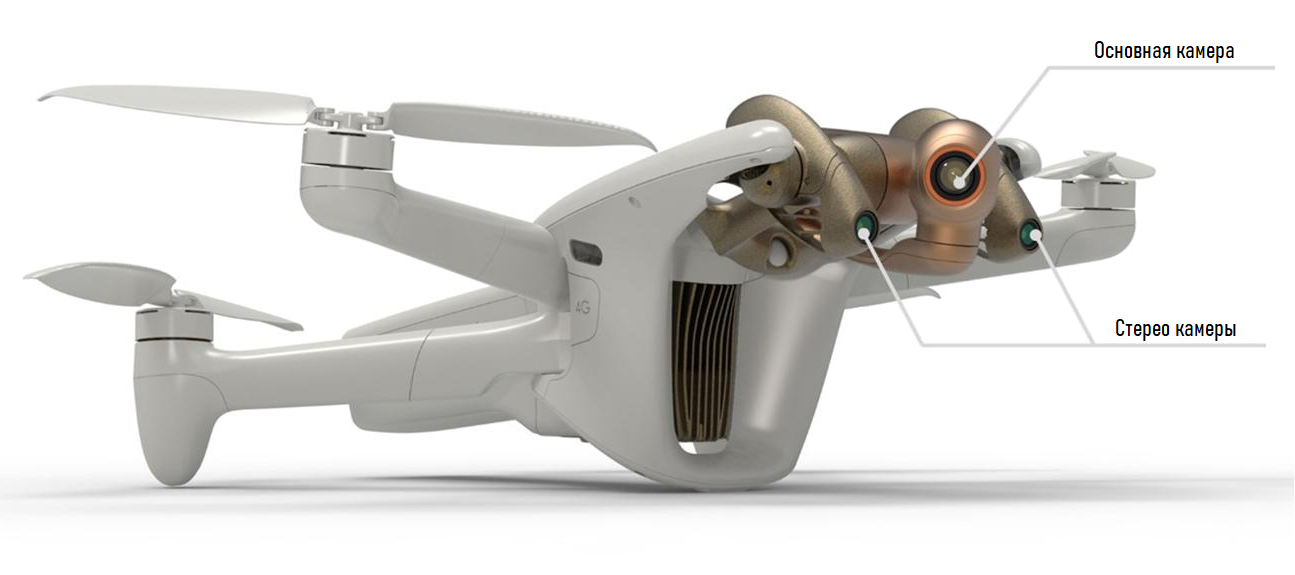 تثبیت کننده دوگانه ANAFI Ai برای درک و تجسم.
تثبیت کننده دوگانه ANAFI Ai برای درک و تجسم.
محورهای شیب دو چوب لباسی به صورت خطی هستند و برای دستیابی به طراحی فوق فشرده ترکیب شده اند.
به لطف این راه حل ، می توان دوربین اصلی و سیستم حسگر را در دو جهت مختلف هدایت کرد. این طرح از استفاده از دوربین های گران قیمت در کناره ها ، بالا ، پایین و عقب هواپیمای بدون سرنشین جلوگیری می کند در حالی که هنوز یک میدان دید وسیع برای سیستم سنجش فراهم می کند.
این بخش به شرح زیر تنظیم شده است:
- جزئیات سنسورهای مورد استفاده برای سیستم حسگر
- مشخصات هر دو گیمبال دوربین اصلی و گیمبال سیستم حسگر
- استراتژی های هدف گیری سیستم حسگر برای بهره برداری از پتانسیل ساختار تعلیق دوگانه
سنسورها
سیستم حسگر بر اساس یک جفت دوربین های یکسان با یک محور پیچ...
 لولا مکانیکی 1 محور برای سیستم سنجش ANAFI Ai.
لولا مکانیکی 1 محور برای سیستم سنجش ANAFI Ai.
مشخصات سنسور به شرح زیر است:
- مدل: Onsemi AR0144CSSM28SUD20
- رنگ: تک رنگ
- وضوح تصویر: 1280 × 800 پیکسل
- نرخ فریم: 30 فریم در ثانیه
- شاتر جهانی
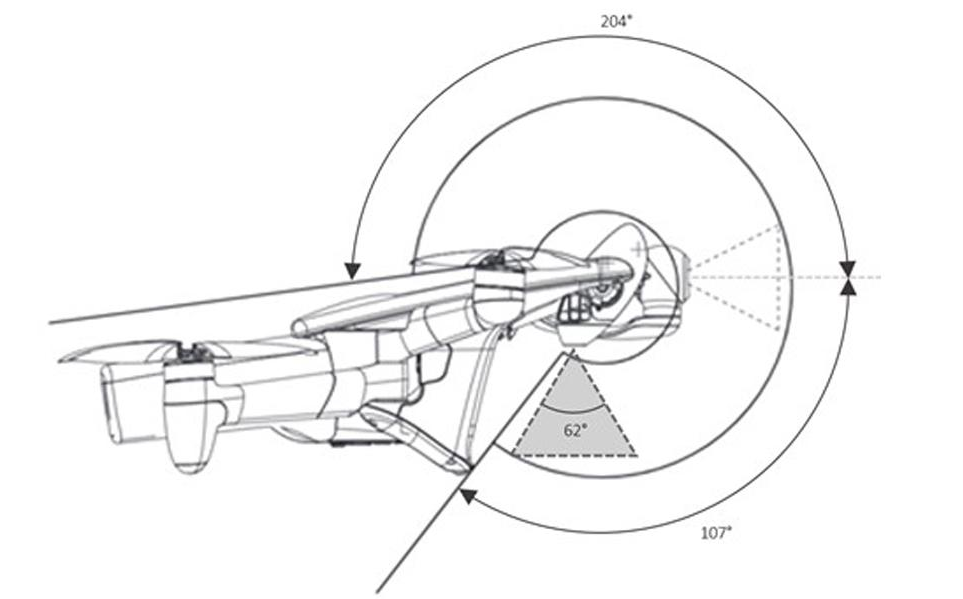
- میدان دید کامل افقی: 118 درجه (110 درجه قابل استفاده برای سنجش)
- میدان دید عمودی کامل: 72 درجه (62 درجه قابل استفاده برای حس کردن)
- فاصله کانونی: 1.47 میلی متر (0.039 اینچ - 492.94610 پیکسل)
- دیافراگم: f / 2.7
مشخصات پل های استریو به شرح زیر است:
- محور مشترک زمین
- خط شروع / فاصله: 62 میلی متر (2.44 اینچ)
- ضبط همزمان با سرعت 30 فریم در ثانیه

دو گیمبال
گیمبال مکانیکی دوربین اصلی یک پیچ رول مکانیکی 3 محوره است l -yaw "با مشخصات زیر:
- Pitch Limiters: -116 ° / 176 °
- Roll Limiters: / -36 °
- Yaw Limiters: / - 48 درجه
سیستم تعلیق مکانیکی سیستم سنجش یک سیستم تعلیق تک محوری با مشخصات زیر است:
- انتهای توقف در زمین: -107 درجه / 204 درجه
- زمان سفر از یک توقف به سر دیگر: 300 میلی ثانیه
سیستم سنجش دارای 311 درجه حرکت است (از این تعداد 296 درجه توسط بدن هواپیمای بدون سرنشین پوشانده نشده است) ، که امکان عقبگرد را فراهم می کند. ادراک
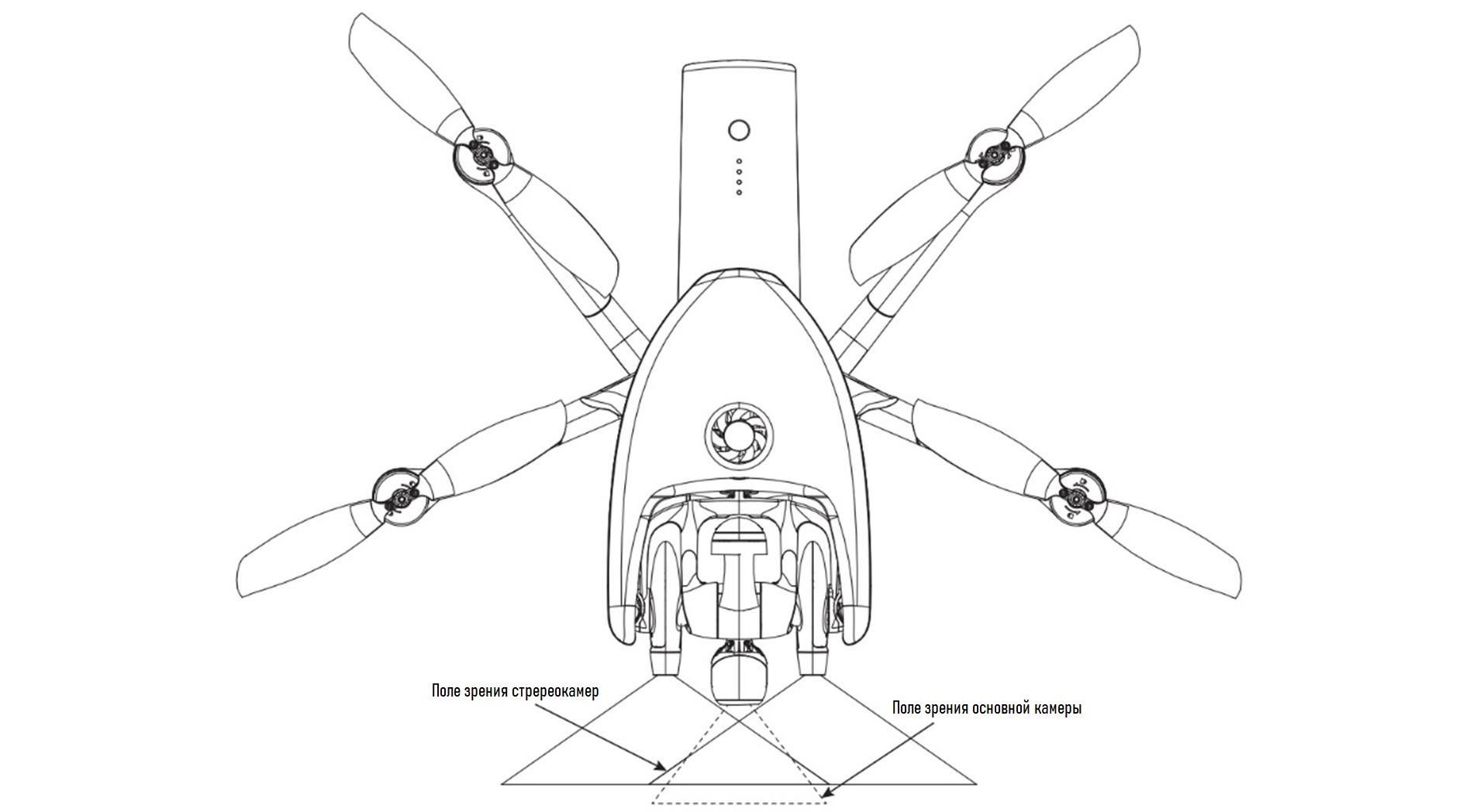
میدان دید عمودی لحظه ای و سیستم های محدود کننده ادراک ANAFI Ai.
این سیستم به گونه ای طراحی شده است که:
- پره های پروانه وارد میدان دید دوربین اصلی نمی شوند
- اصلی دوربین نمی تواند میدان دید سیستم ادراک را پوشش دهد
- دوربین اصلی و سیستم حسگر را می توان به طور کامل برای محافظت از لنزها به عقب تاخت (1335] ، در حین ذخیره سازی یا در موارد اضطراری در پرواز
 میدان دید افقی سیستم درک ANAFI Ai.
میدان دید افقی سیستم درک ANAFI Ai.
هنگام خم شدن به عقب ، سیستم ادراک به بالاترین موقعیت حرکت می کند و بدین ترتیب نمای واضحی را ارائه می دهد.
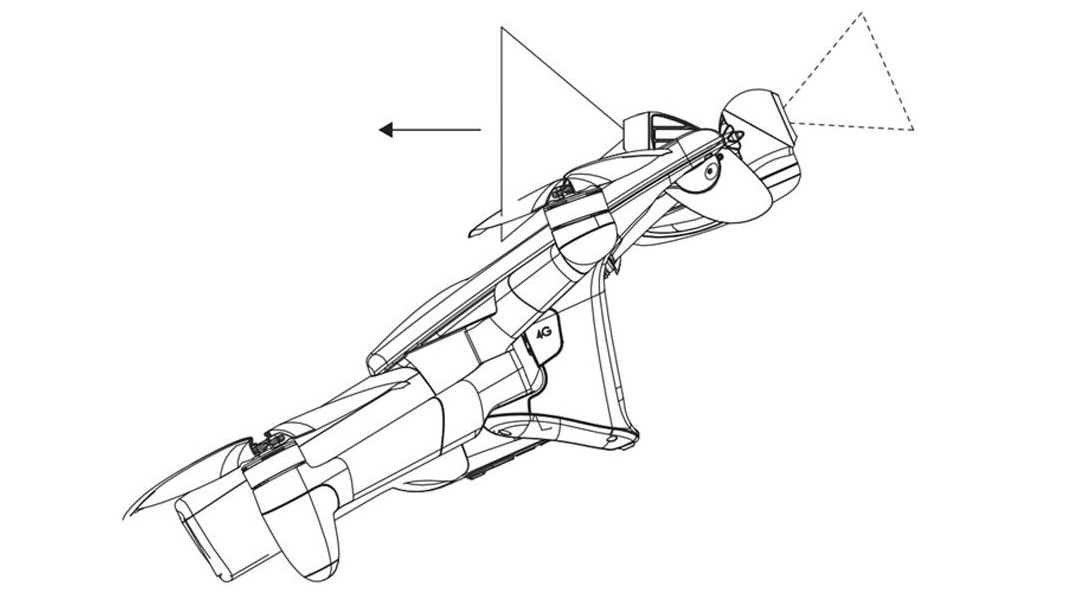
درک ANAFI Ai در حالت کاملاً شیب دار برای پرواز به عقب.
بازسازی محیط
بازسازی محیط سه بعدی اطراف برای پرواز خودکار در دو مرحله انجام می شود:
- ) استخراج اطلاعات عمق از درک در قالب نقشه های عمق
- ترکیب داده های نقشه عمق در یک شبکه سه بعدی پر کردن
دو روش برای به دست آوردن نقشه های عمق از حسگرهای ادراک استفاده می شود:
- عمق بر اساس تراز استریو
- عمق از حرکت
عمق از مکاتبات استریو
روش اصلی استخراج عمق اطلاعات بر اساس اختلاف منظر بین دو دوربین استریو از سیستم ادراک است. با عکاسی از محیط در یک جهت ، اما از دو موقعیت متفاوت ، اشیاء در حوزه دید سیستم ادراک در موقعیت های مختلف در تصاویر بدست آمده از دو دوربین ظاهر می شوند. هرچه موضوع نزدیکتر باشد ، تفاوت موقعیت بیشتر می شود.
بنابراین ، استراتژی این است که نقاطی را که در تصاویر بدست آمده توسط دوربین های استریوی چپ و راست مربوط به یک جسم در زمینه دید سیستم حسگر تعیین شده است تعیین کرده و تفاوت موقعیت آنها را اندازه گیری کنید. نقاط در دو تصویر این تفاوت را اختلاف می نامند و در تعداد پیکسل اندازه گیری می شود.
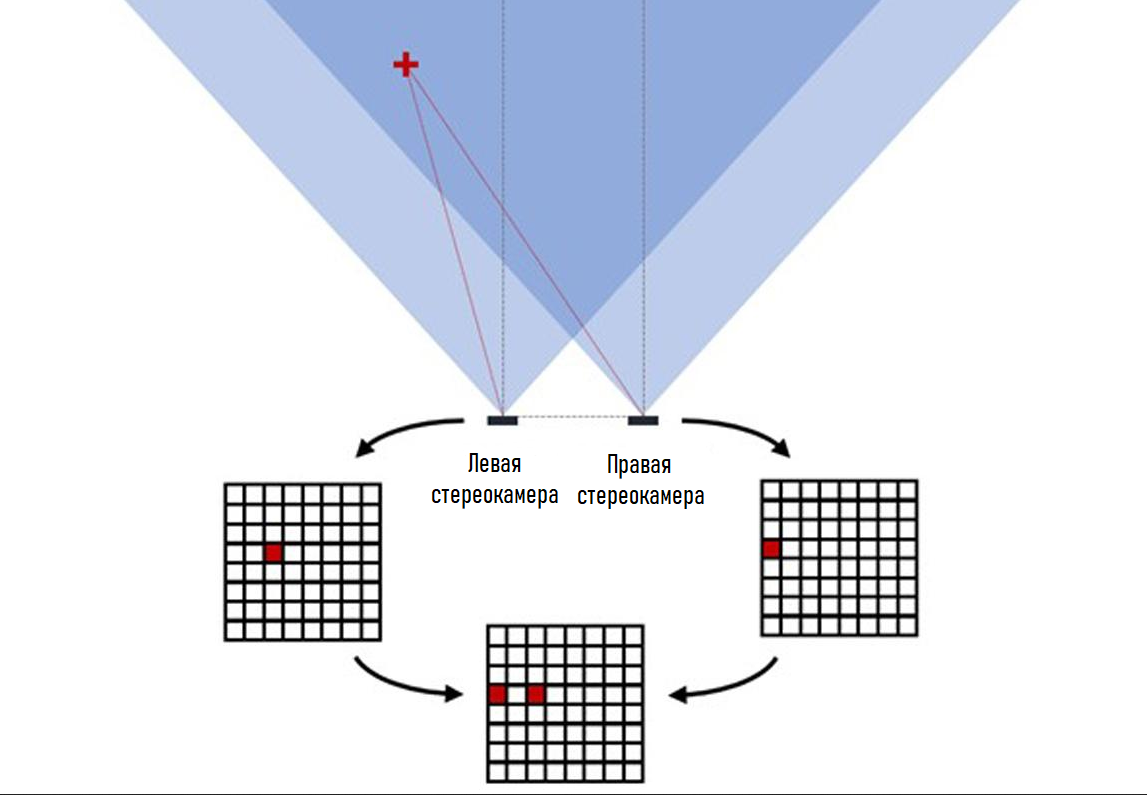 تصویر اصل دید استریو - نقطه سه بعدی قرمز در موقعیت های مختلف در تصاویر چپ و راست قرار دارد.
تصویر اصل دید استریو - نقطه سه بعدی قرمز در موقعیت های مختلف در تصاویر چپ و راست قرار دارد.
این اختلاف می تواند با عمق هر یک از این نقاط با استفاده از رابطه عمق زیر = = کانونی * پایه / ناهماهنگی ، که در آن عمق و خط پایه در واحدهای یکسانی و کانونی بیان می شود ، مرتبط باشد. طول و اختلاف در تعداد پیکسل بیان می شود.
نتیجه محاسبه به شکل نقشه عمق 90 17 176 پیکسل به دست می آید ، که ارزش هر پیکسل مربوط به عمق بر حسب متر است. نقشه عمق در 30 هرتز تجدید می شود.
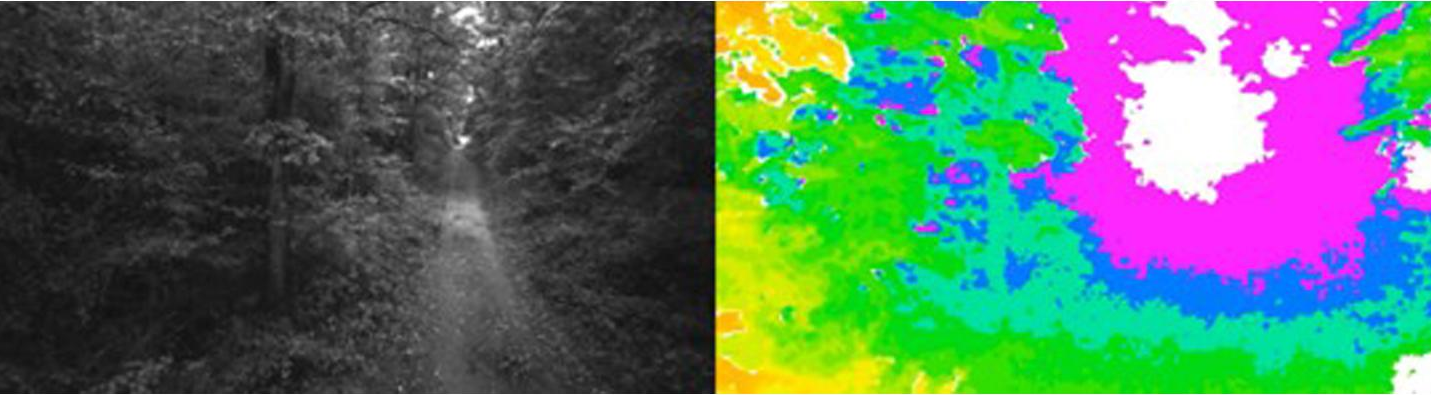
نمونه ای از تصویر گرفته شده توسط دوربین سمت راست سیستم حسگر ANAFI Ai (چپ) و عمق مربوطه با استفاده از تصویربرداری استریو (راست). نقشه رنگ از قرمز (نزدیک) به بنفش (دورتر) می رود - سفید به معنی خارج از دسترس است.
نتیجه فوری این امر این است که عمق اندازه گیری شده توسط این روش گسسته است ، زیرا این اختلاف تنها می تواند مقادیر گسسته (تعداد پیکسل) را بگیرد. یک نقطه سه بعدی که به اندازه کافی دور از سیستم ادراک قرار دارد و یک اختلاف نظری کمتر از یک پیکسل ایجاد می کند ، بی نهایت در نظر گرفته می شود ، زیرا تفاوت واقعی گسسته واقعی برابر 0 است. دقت روش مقایسه استریو با افزایش فاصله کاهش می یابد ، اگرچه وجود دارد روشهایی هستند که با دستیابی به نمونه برداری زیر پیکسل می توانند این پدیده را کاهش دهند.
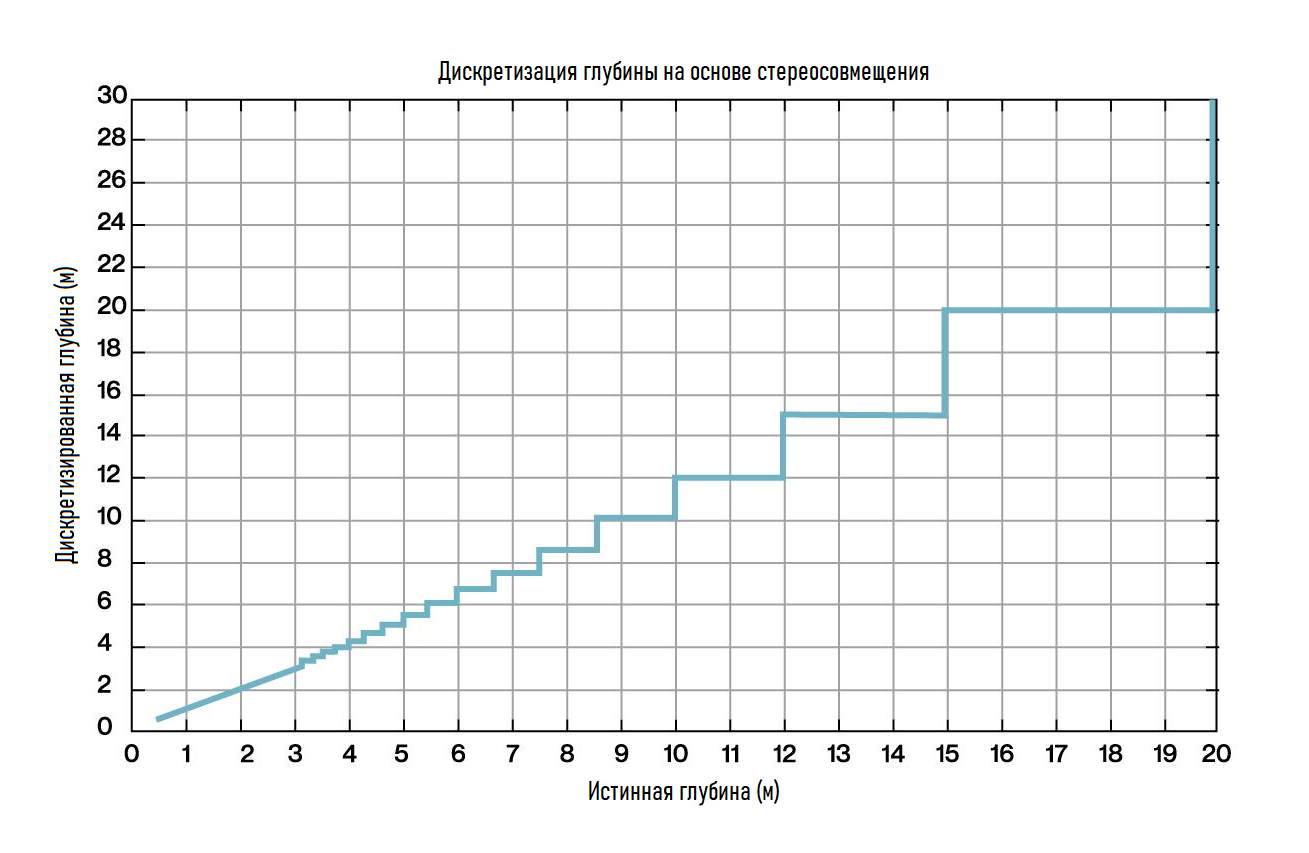 عمق گسسته که با "تراز استریو" در مقابل "عمق واقعی" اندازه گیری می شود.
عمق گسسته که با "تراز استریو" در مقابل "عمق واقعی" اندازه گیری می شود.
علاوه بر این ، با نزدیک شدن عمق به صفر ، اختلاف اختلاف می کند.از آنجا که تعداد پیکسل در تصاویر محدود است ، مقدار تفاوت نیز محدود است. در نتیجه ، حداقل عمقی وجود دارد که در آن سیستم ادراکی کور است. این حداقل عمق برای ANAFI Ai 36 سانتی متر است.
درباره کالیبراسیون: هر جفت دوربین استریو برای اندازه گیری دقیق مغایرت های کوچک بین دو دوربین و جبران آنها در محاسبات عمق پردازنده ، کارخانه ای کالیبره شده است.
همچنین کاربر می تواند با استفاده از الگوی آزمایشی ارائه شده با هواپیمای بدون سرنشین ، یک جفت دوربین استریو را مجدداً کالیبره کند. به طور خاص ، تا حدودی ، هواپیمای بدون سرنشین قادر به تشخیص خطاهای احتمالی کالیبراسیون است که ممکن است در طول عمر خود ایجاد شود. در این حالت ، نرم افزار هواپیما سعی می کند آنها را تنظیم و جبران کند ، و در صورت عدم موفقیت ، یک اعلان ظاهر می شود که از شما می خواهد دوباره کالیبره کنید.
عمق از حرکت
از حرکت هواپیمای بدون سرنشین نیز می توان برای جمع آوری تصاویر محیط از زوایای مختلف و در نتیجه بازسازی اطلاعات عمق استفاده کرد. این تکنیک عمق از حرکت یا سنجش تک چشمی نامیده می شود ، زیرا یک دوربین متحرک برای جمع آوری اطلاعات عمق کافی است.
اصل عملکرد مشابه دید استریو است ، اما به جای مقایسه تصاویری از محیط که توسط ناظران مختلف به طور همزمان بدست آمده است ، ادراک تصاویری از محیط را که توسط یک ناظر یکسان در زمان های مختلف به دست آمده مقایسه می کند. اگر پهپاد در حال حرکت باشد ، تصاویر این ناظر منحصر به فرد از زوایای مختلف ضبط می شود. با دانستن موقعیتی که هر فریم در آن گرفته شده است ، می توان نقاط متناظر با یک ویژگی را در تصاویر مختلف مثلث بندی کرد و آنها را به حالت سه بعدی برگرداند.
خروجی یک ابر نقطه ای سه بعدی شامل حداکثر 500 نقطه برای ANAFI Ai است که با فرکانس 10 هرتز تولید می شود.
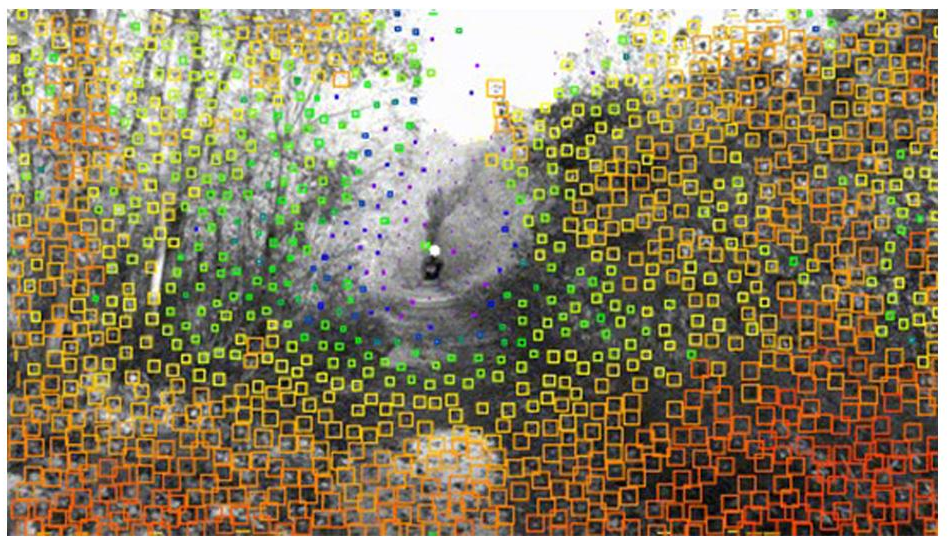 نمونه ای از ابر نقطه ای که بر اساس عمق حرکت ایجاد شده است - نقشه رنگ از قرمز (نزدیک) به بنفش (دورتر) می رود.
نمونه ای از ابر نقطه ای که بر اساس عمق حرکت ایجاد شده است - نقشه رنگ از قرمز (نزدیک) به بنفش (دورتر) می رود.
الگوریتم ANAFI Ai Motion Depth عموماً اطلاعات کمتری (ابر نقطه پراکنده) نسبت به الگوریتم تطبیق استریو تولید می کند و نیاز به حرکت هواپیمای بدون سرنشین برای جمع آوری اطلاعات دارد. علاوه بر این ، این الگوریتم نمی تواند اطلاعات را در جهت حرکت دقیق (حداقل برای پخش مستقیم) استخراج کند ، زیرا اشیاء موجود در تصاویر در این جهت تقریبا ثابت به نظر می رسند (فوکوس انبساط).
با این حال ، محدوده تشخیص بهتری (محدوده نظری بی نهایت) نسبت به تطبیق استریو دارد.
Fill Grid
اطلاعات عمق از الگوریتم های سنجش استریو و تک چشمی در Fill Fill Grid ادغام شده است. این مش از محیط سه بعدی به مکعب های سه بعدی به نام voxels نمونه می گیرد. به هر وکسل احتمال اشغال شدن توسط یک مانع یا برعکس ، رهایی از یک مانع اختصاص داده شده است.
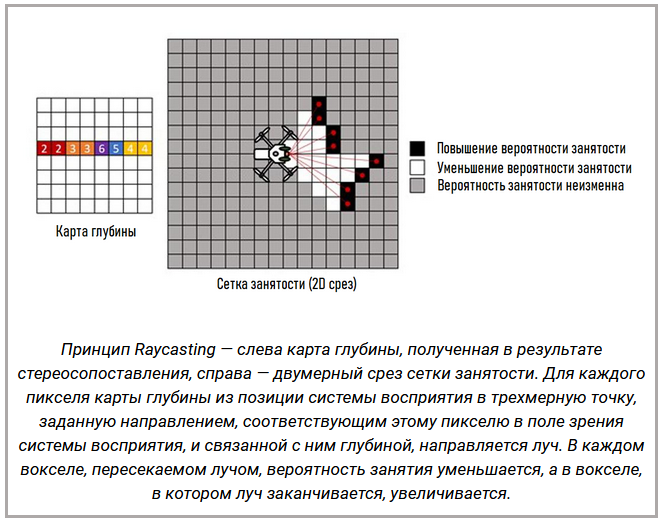
یک الگوریتم انتقال پرتو برای ادغام اطلاعات عمقی در یک شبکه پر کننده استفاده می شود. برای هر پیکسل نقشه عمق به دست آمده در نتیجه مقایسه استریو ، به یک نقطه سه بعدی و برای هر نقطه از ابر نقطه ای - به عمق بدست آمده در نتیجه حرکت تبدیل می شود:
- یک پرتو در شبکه پر کننده از موقعیت سیستم درک به موقعیت نقطه 3D کشیده می شود.
- احتمال اشغال ووکسل حاوی نقطه 3D افزایش می یابد.
- احتمال اینکه همه وکسل هایی که توسط اشعه ای عبور می کنند غیر از پرتوی حاوی نقطه سه بعدی اشغال شده باشد ، کاهش می یابد.
بنابراین ، شبکه به عنوان یک فیلتر زمان برای اطلاعات عمق عمل می کند ، هر گونه نویز احتمالی را در اندازه گیری عمق جذب می کند و به عنوان حافظه اندازه گیری های قبلی ، که اجازه می دهد حتی در غیاب میدان دید 360 درجه پیوسته سیستم ادراک ، می توانید در محیط های دشوار حرکت کنید.
 نمونه ای از یک شبکه پر کننده. وکسل ها روی نمای استریو سمت راست با دقت زیادی در مشغله بودن ، از قرمز (نزدیک) تا بنفش (دور) روی هم قرار می گیرند.
نمونه ای از یک شبکه پر کننده. وکسل ها روی نمای استریو سمت راست با دقت زیادی در مشغله بودن ، از قرمز (نزدیک) تا بنفش (دور) روی هم قرار می گیرند.
شبکه پر کننده اساس الگوریتم های برنامه ریزی حرکت است که توسط ANAFI Ai برای پرواز خودکار و جلوگیری از مانع استفاده می شود.
اجتناب از موانع
به لطف آگاهی از محیط سه بعدی هواپیمای بدون سرنشین ذخیره شده در شبکه پر کننده ، ANAFI Ai می تواند از موانع جلوگیری کند. این ایمنی اضافی قابل توجهی را برای مأموریت های خودران فراهم می کند ، اما برای پروازهای دستی نیز مفید است ، به ویژه اگر خط دید بین خلبان و هواپیمای بدون سرنشین مختل شود.
هر 30 میلی ثانیه ANAFI Ai پیش بینی می کند که افق کوتاه اسمی آینده در آینده چگونه خواهد بود. این پیش بینی از پیوندهای ارسال شده توسط کاربر استنباط می شود ، خواه این دستورات پرواز از کنترل از راه دور ، نقاط راه برای پیوستن به یک برنامه پرواز یا یک مسیر ورودی باشد. سپس ، با استفاده از مدل شبیه سازی شده هواپیمای بدون سرنشین داخلی ، الگوریتم تغییر زمان ، کوچکترین اصلاحات ممکن را در این مسیر اسمی پیش بینی شده محاسبه می کند که آن را بدون برخورد و برای پهپاد امکان پذیر می سازد.
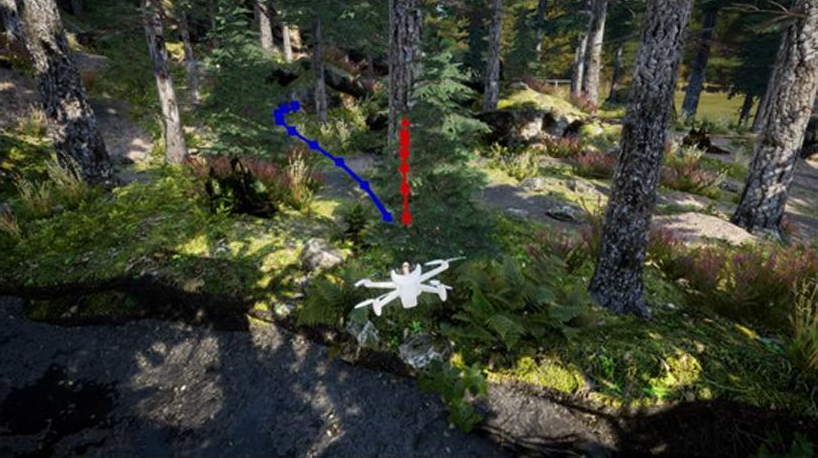 نمونه ای از مسیر اصلاح شده که توسط الگوریتم اجتناب از موانع در پاسخ به برخورد مسیر مرجع با درخت محاسبه شده است.
نمونه ای از مسیر اصلاح شده که توسط الگوریتم اجتناب از موانع در پاسخ به برخورد مسیر مرجع با درخت محاسبه شده است.
سیستم اجتناب از موانع ANAFI Ai برای سرعتهای زیر طراحی شده است:
- پرواز سطح: 29 کیلومتر در ساعت
- صعود: 14 کیلومتر در ساعت
- فرود: 11 کیلومتر در ساعت
عملکرد اجتناب در باران یا باد شدید ، نور کم یا اختلال در ناوبری ماهواره ای محدود است. علاوه بر این ، قبل از پرواز ، باید از تمیز بودن لنزهای سیستم سنجش اطمینان حاصل کنید.
ماموریت های پرواز

ویژگی های کلیدی
هوا SDK (نگاه کنید بهبخش SDK) به توسعه دهندگان اجازه می دهد تا به هر سنسور هواپیمای بدون سرنشین ، دوربین ، رابط اتصال و عملکرد مستقل دسترسی داشته باشند. بنابراین ، آنها می توانند رفتار پهپاد را برای ایجاد ماموریت های پرواز سفارشی کنند. هر مأموریت پروازی شامل مجموعه ای از رفتارها یا حالتهای اصلی است:
- روی زمین: رفتار هنگام توقف موتورها ، به عنوان مثال کالیبراسیون سنسور.
- برخاست: استراتژی های مختلف برخاست
- شناور: یک نقطه ثابت را نگه دارید
- پرواز: دستی عملکردها و پرواز خودکار
- فرود: استراتژی های مختلف فرود
- بحرانی: هنگام تشخیص یک وضعیت بحرانی
ماموریت های سفارشی پرواز می توانند رفتارهای جدیدی ایجاد کرده یا از آنها در ماموریت پیش فرض استفاده مجدد کنند.
قیمت و در دسترس بودن
شروع فروش هواپیمای بدون سرنشین ANAFI Ai برای سپتامبر 2021 برنامه ریزی شده است. اطلاعات قیمت در حال حاضر فاش نشده است. ما همچنان بر اطلاعات ورودی نظارت می کنیم و قطعاً این بخش را در آینده به روز خواهیم کرد.

اسناد بارگیری
اسناد آشنایی با محصول از توسعه دهنده:
فیلم ها
نظرات برتر ANAFI Ai از توسعه دهنده و کاربران
بسته بندی و اولین پرواز.
پرواز آزمایشی هواپیمای بدون سرنشین از راه دور با اتصال 4G. کل زمان پرواز 29 دقیقه با متوسط سرعت پرواز افقی 58 کیلومتر در ساعت (16 متر بر ثانیه) بود. طی این مدت ، هواپیمای بدون سرنشین توانست 27 کیلومتر را طی کند. همچنین می توانید توجه داشته باشید که پرواز در شرایط باد شدید انجام شده است ، که به طور مداوم توسط سیستم پهپادی هشدار داده می شد.
.






