
- 1 소개
- 2 기계에 대한 개발자
- 3 기능
- 4 패키지 내용
- 5 사양
- 5.1 드론
- 5.2 통신
- 5.3 내비게이션 시스템
- 5.4 Skycontroller
- 5.5 항공기 지능형 배터리
- ) 5.6 앱
- 5.7 카메라
- 5.8 자율 비행 모드
- 5.9 사이버 보안
- 5.10 Parrot SDK
- 6 외형
- 7 통신
- 7.1 4G
- 7.2 Max. 4G 연결 시 범위
- 7.3 Wi-Fi
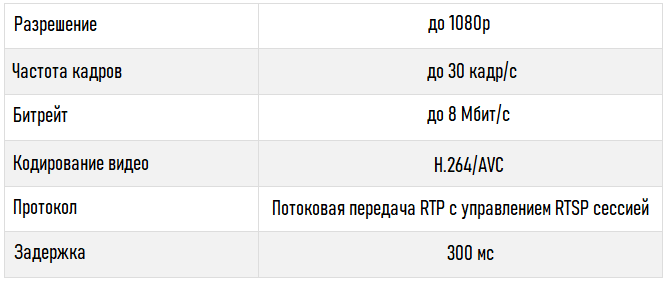
- 7.4 라이브 비디오
- 8 카메라
- 8.1 48MP 매트릭스
- 8.2 렌즈
- 8.3 비디오 모드
- 8.4 비디오 인코딩
- 8.5 HDR
- 8.6 사진 모드
- 9 하이브리드 안정화
- 9.1 메인 카메라 짐벌
- 10 사진 측량
- 10.1 검사 및 지도 제작
- 10.2 AI 및 4G 기능
- 10.3 자율 비행
- 11 사진 측량 또는 라이더
- 11.1 사진 측량 전문가
- 11.2 LIDAR 단점
- 12 SDK
- 12.1 Air SDK
- 12.2 Ground SDK
- 12.3 OpenFlight
- 12.4 Sphinx
- 12.5 Olympe
- 12.6 PdrAW
- 12.7 Models C. A. D.
- 12.8 MAVLink 및 GUTMA 호환성
- 13 Parrot 드론을 위한 최대 파트너 생태계
- 13.1 Parrot 모든 비즈니스 요구 사항에 대해
- 14 사이버 보안
- 14.1 데이터 개인 정보 보호
- 14.2 FIPS140 준수 -2 CC EAL5 보안 요소
- 14.3 4G 보안 연결 및 강력한 인증
- 14.4 보안 초기화 및 업그레이드
- 14.5 보안 요소에서 사용자 키 설정
- 14.6 디지털 서명된 사진
- 14.7 버그 현상금으로 투명성 및 지속적인 보안 확인
- 15 데이터 관리
- 15.1 수집된 데이터
- 15.2 수집된 데이터의 최종 사용 [1 26]
- 15.3 인공지능(AI) 개선
- 16 비행특성
- 16.1 공기역학적 특성
- 16.2 액츄에이터 및 공기역학
- 16.3 센서
- 16.4 센서 특성 [137
- 16.5 자동 조종 장치
- 17 자율 비행
- 17.1 주요 기능
- 17.2 지각 시스템 전략
- 17.3 센서
- 17.4 이중 서스펜션
- 17.5 환경 재구성
- 18 비행 임무
- 18.1 주요 기능
- 19 가격 및 가용성
- 20 문서 다운로드
- 21 비디오
소개 [16 4]
Parrot Anafi Ai는 잘 알려진 프랑스 개발자
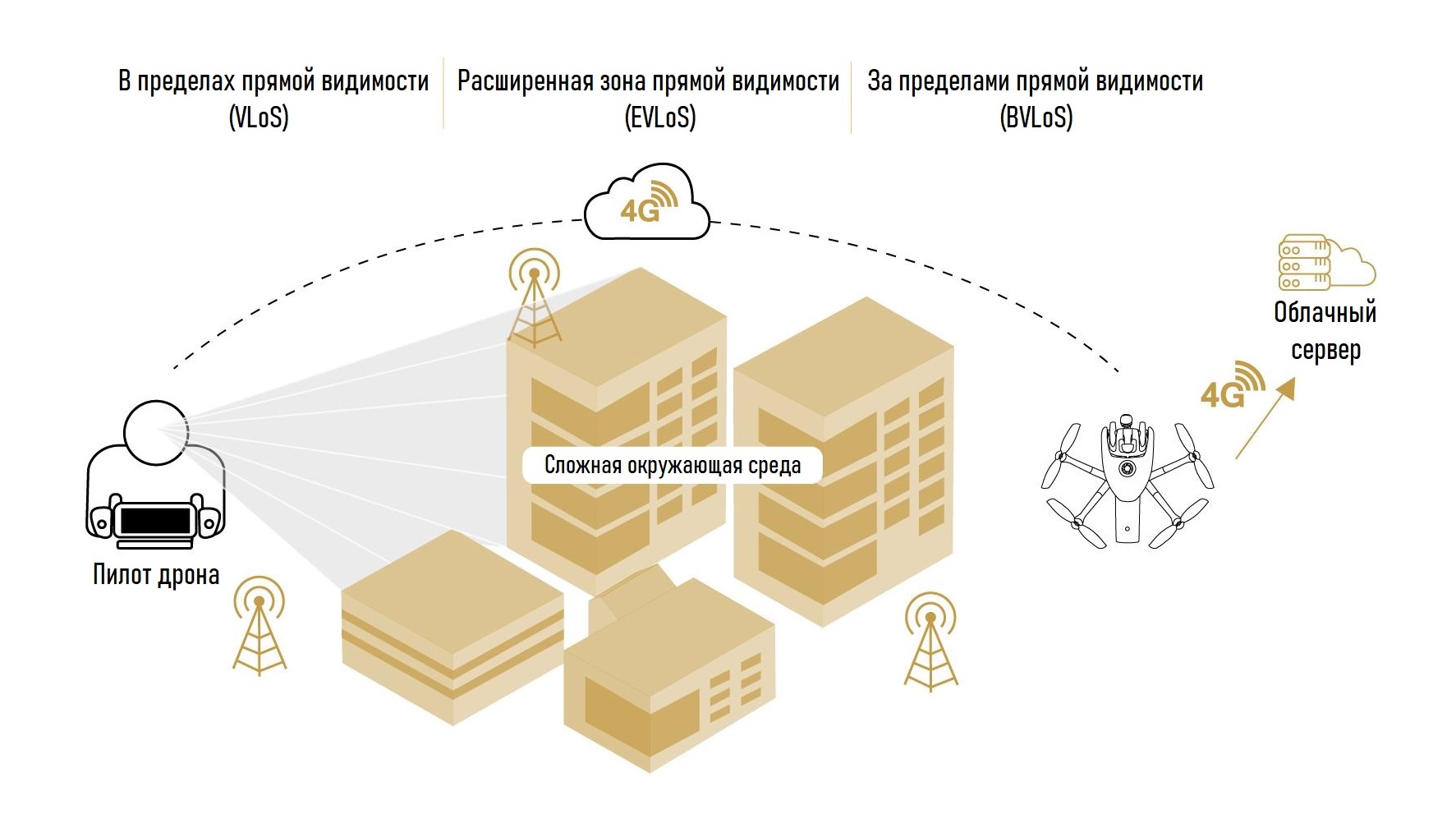
Anafi Ai의 전화 카드는 내장된 4G 모듈 덕분에 드론은 4세대 이동 통신을 드론과 제어 장비 간의 주요 데이터 전송 채널로 사용할 수 있었습니다. 비행 범위에 대한 모든 제한을 제거하고 시야 밖에서 UAV의 작동을 미리 결정합니다.앞으로 우리는 기계의 선언된 잠재력이 믿을 수 없을 정도로 강력하고 프랑스 엔지니어를 창조하기 위해 자연에서 영감을 받은 미래 지향적인 외관에 해당하는 것으로 밝혀졌습니다.
자동차에 대한 개발자
Parrot의 마케팅 이사 인 Martin Linee까지 Parrot 드론

기능
Parrot Anafi Ai의 주요 기능:
- 무게 898 그램
- 비행시간 60초
- 독특한 휴대용 접이식 디자인
- 모든 환경 조건에서 제한 없이 완전한 드론/제어 장비 상호 작용을 위한 내장 4G 통신 모듈
- 전 세계적으로 LTE와 호환
- 무지향성 신호 전송 시스템 장착(반사기가 있는 4개의 지향성 안테나(이득: 2.5dBi/s 안테나) 드론은 상대 방향과 위치에 따라 최적의 안테나 쌍을 결정합니다. 조종사 위치)
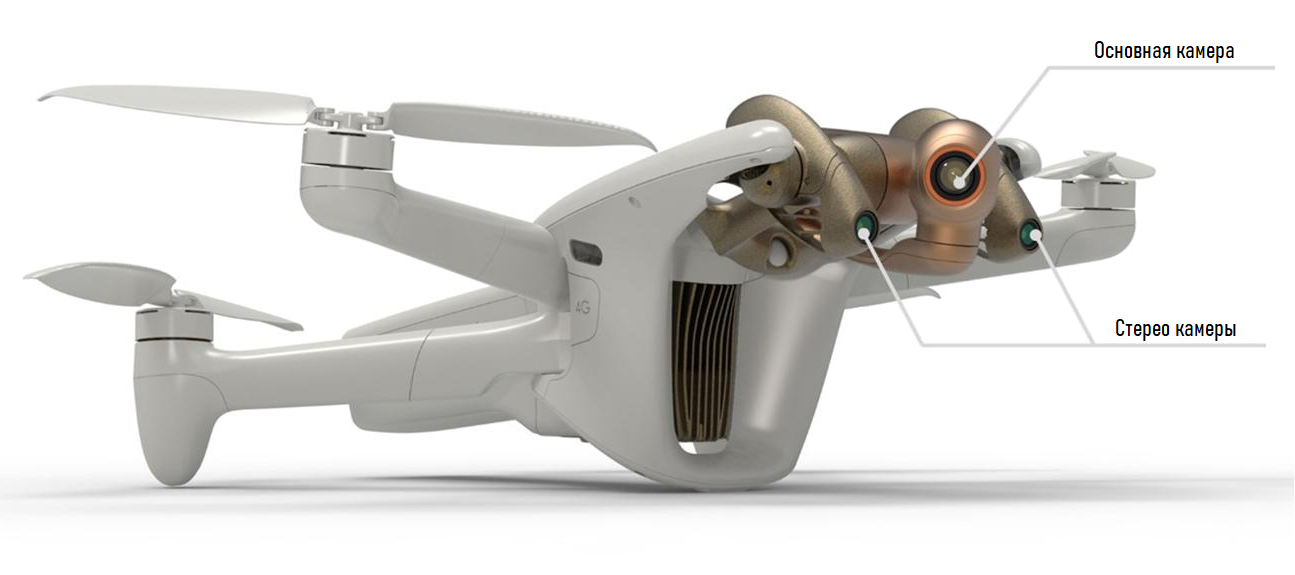
- 330도 팬 범위(-120° ~ 210°)가 있는 특수 짐벌에 장착된 한 쌍의 입체 카메라를 기반으로 하는 주변 세계의 고유한 전방향 이미징 시스템 장착, 지능형 최적화 시스템과 함께 작동합니다. 비행 경로
- 실내 비행에 적합
- 1080p의 낮은 대기 시간(300m/s)으로 라이브 비디오 스트리밍, 비디오 비트 전송률 12Mbps
- 비행 중에 직접 클라우드 스토리지로 파일을 전송하는 기능
- 본격적인 드론/장비 상호작용 제어를 위한 내장 Wi-Fi 통신 모듈(Wi-Fi 802.11a/b/g/n) 대체 연결 옵션)
- 슬레이브. Wi-Fi 주파수 범위: 2.4GHz / 5.8GHz
- Max. Wi-Fi를 통한 FPV 비행 범위: 9 km
- 보호 등급 드론 IPX3
- Max. 비행 시간 32분
- 최대. 수평 비행 속도 61km/h
- Max. 바람 저항: 13m/s
- Max.해발 5000m
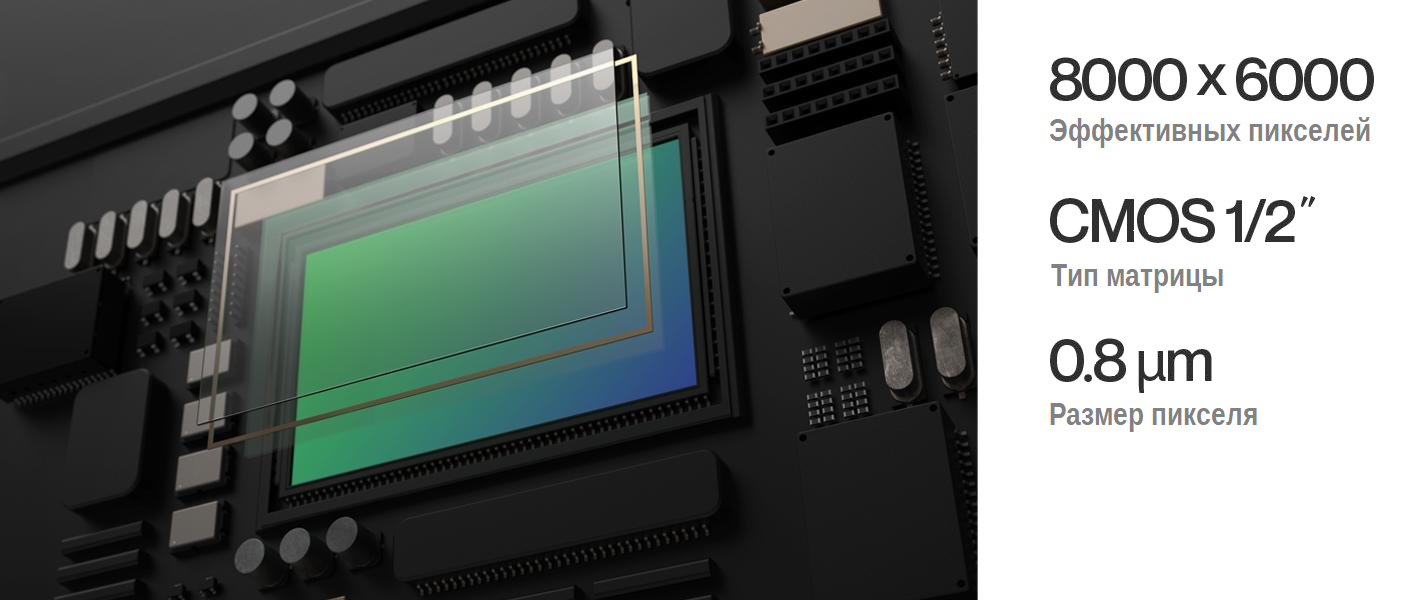
- 픽셀 크기가 0.8μm인 1/2인치 CMOS 매트릭스에 구축된 48MP 4K 카메라. 내장된 Bayer 컬러 필터 어레이 포함
- 광학 LD-ASPH 렌즈
- 하이브리드 6축 이미지 안정화 시스템(3축 기계식 3축 디지털 EIS)
- 제어 가능 작동 범위 짐벌 -90 ° ~ 90 °
- 6x 무손실 디지털 줌 (2x 4K / 4x FHD)
- Max. 비디오 비트 전송률 200Mbps
- 비디오 녹화 형식 HDR8 / HDR10
- Max. 다이나믹 레인지 14EV
- 후처리를 위한 P-log 색상 프로파일
- 5 × 자동 비행 및 촬영 모드 (사진 측량 / 비행 계획 / 카메라맨 / 스마트 RTH / 차량)
- MicroSD 및 SIM 카드용 내장 슬롯
- PIX4D Suite 와 호환 가능
- 사진 측량 비행 모드는 mob에서 사용할 수 있습니다. FreeFlight 7 앱 및 OpenFlight 소프트웨어
- 원 클릭 비행 계획 생성
- 48MP 1fps 사진 측량: 경쟁 제품보다 두 배 빠름
- 촬영 정확도: 0.46cm/pix. GSD at 30m
- Parrot SDK 지원(Air SDK를 사용하여 드론에 코드 포함, Ground SDK를 사용하여 모바일 애플리케이션 생성, OpenFlight를 사용하여 오픈 소스 지상국 구성, 최신 Sphinx와 상호 작용하는 기능 포함) Olympe를 사용한 Python 스크립팅 및 Python 스크립팅 및 PdrAW로 비디오 및 메타데이터 처리)
- 타사 소프트웨어와 호환 가능: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- ANAFI Ai는 일반 규정 준수 규정 유럽 연합 데이터 보호 규정(GDPR)
- 내장 NIST FIPS140-2 레벨 3 WISeKey 보안 요소(Common Criteria EAL5 인증 포함)를 통한 우수한 데이터 개인 정보 보호
- SRTP/DTLS로 보호되는 비디오 및 제어 webRTC에 따르면
- New Parrot Skyco 휴대용 제어 장비 컨트롤러 4
- 새로운 모바일 애플리케이션 Parrot FreeFlight 7

패키지
개발자가 드론 제공 다음을 포함하는 단일 구성:
- Drone ANAFI Ai
- 견고한 운송 케이스
- 제어 장비 Parrot Skycontroller 4
- 1 × Smart 배터리
- USB-PD 충전기
- 예비 프로펠러 키트(2CW / 2CCW)
- 컴패니언 케이블(USB-C to Lightning)
- 2 × 컴패니언 케이블 (USB -C to USB-C)
- 교정 차트

사양
) 항공기

통신
내비게이션 시스템
Skycontroller 4

항공기 지능형 배터리
앱

카메라

) 자율 비행 모드
사이버 보안
Parrot SDK
다음으로, Parrot Anafi Ai의 주요 정보를 숙지할 수 있으며, 이를 통해 기계의 선언된 잠재력에 대해 더 자세히 배울 수 있을 뿐만 아니라 상용 버전의 드론 과 비교하여 구현된 개선 사항에 대해 알아볼 수 있습니다. Parrot Anfi Thermal 및 주요 브랜드의 기타 드론.
외모





통신
4G
ANAFI Ai에는 4G 무선 모듈이 포함됩니다. Wi-Fi 라디오 모듈)을 사용하면 최대 비트레이트 12Mbps, 매우 짧은 대기 시간(300ms)으로 1080p 품질로 비디오 스트림을 범위 제한 없이 전 세계 어디에서나 방송할 수 있습니다.
호환성
ANAFI Ai 4G 모듈은 전 세계적으로 배포된 주파수의 98% 이상을 커버하는 28개 이상의 주파수 대역을 지원합니다.
네트워크 자동 전환
4G 및 Wi-Fi 네트워크의 품질 및 대역폭을 100ms마다 측정하여 스트리밍을 네트워크 조건에 맞게 조정합니다. 라우팅 알고리즘과 결합하여 Wi-Fi가 심하게 중단되는 경우에도 드론과 컨트롤러 간의 연결이 유지됩니다. 따라서 Wi-Fi의 유효 대역폭(사용 가능한 대역폭)이 1.5Mbps 미만인 경우 시스템이 자동으로 4G로 전환됩니다.
조종사가 드론의 Wi-Fi 네트워크 범위 내에 있을 때 모바일 데이터 소비를 제한하기 위해 비디오 스트림을 끊지 않고 4G에서 Wi-Fi로의 전환도 자동으로 수행됩니다.
최대 4G 연결 시 범위
개발자의 비디오는 최대값을 보여줍니다. 한 번의 배터리 충전으로 한 방향으로 4G 연결이 가능한 Anafi Ai의 비행 범위. 총 비행 시간은 평균 수평 비행 속도 58km/h(16m/s)에서 29분이었습니다. 이 기간 동안 드론은 27km를 비행할 수 있었습니다. 또한 드론 시스템에서 지속적으로 경고하는 강한 바람 조건에서 비행이 수행되었음을 알 수 있습니다.
구현된 비디오 스트림 최적화 알고리즘
4G 혼잡 제어
혼잡 제어 알고리즘은 다음을 허용합니다.
- 전체 네트워크 주기에 걸쳐 패킷 손실을 측정합니다.
- 지연(왕복 시간)을 측정한다.
- 이 두 매개변수에 따라 대역폭을 조정합니다.
알고리즘의 궁극적인 목표는 가능한 가장 낮은 대기 시간을 유지하면서 사용 가능한 대역폭을 최대화하는 것입니다. 이 알고리즘은 네트워크에 따라 최적화된 자체 매개변수를 사용하여 드론에서 사용 가능한 각 인터페이스에서 구현됩니다. 이 알고리즘이 제공하는 정보를 기반으로 링크 관리자는 라우팅 및 활성 인터페이스 결정을 내립니다.
4G 연결을 통한 드론 제어
ANAFI Ai는 드론이 Wi-Fi 범위를 벗어날 경우 30초 이내에 4G를 통해 조종기에 연결하고 15초 이내에 드론이 Wi-Fi 범위 내에 있는 경우. 또한 4G 연결은 다음을 제공합니다.
- VOIP SIP 프로토콜을 기반으로 하는 연결의 감지 및 시작.
- 릴레이 서버를 사용하여 보안 네트워크를 통해 연결을 설정합니다.
비디오 스트림 성능
- 레이턴시: 300ms.
- 보안: webRTC에 따라 SRTP/DTLS로 비디오 및 컨트롤을 보호합니다.
- 안테나: 700MHz ~ 2.6GHz의 28개 LTE 대역.

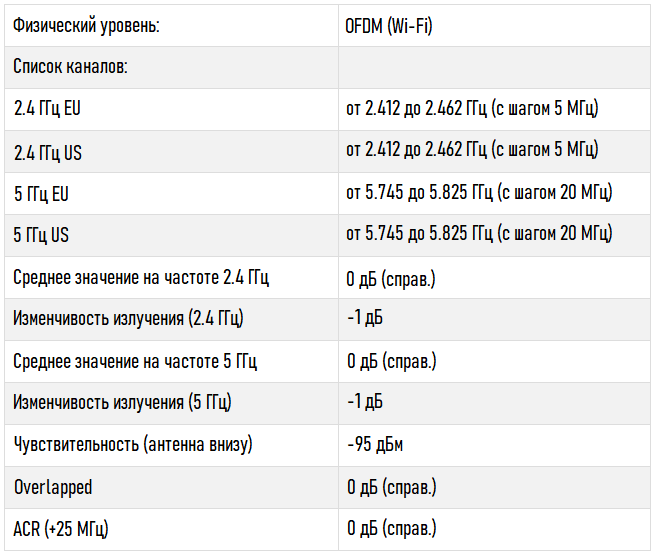
Wi-Fi
전방향 전송 시스템
- ANAFI Ai는 4개의 지향성 반사기 안테나(안테나 이득: 2.5dBi/s). 드론은 방향과 조종사의 위치를 기준으로 최적의 안테나 쌍을 결정합니다.
- 드론의 수평면에서 3.5/-1.5dBi의 재결합 이득으로 ANAFI RF 이득 Ai는 매우 균일합니다.
- 다운스트림 안테나 방사는 ANAFI보다 4dB 향상되었습니다.
고출력 무전기의 외부 디자인
무전기 전면은 매우 우수한 선형성으로 안테나 베이스의 전력을 최대화하고 최대 FCC 제한 전력을 달성하기 위해 감도(6.5Mbps에서 -94dBm).

Wi-Fi 신뢰성
802.11 매개변수
낮은 대역폭, 낮은 대기 시간, 속도에 따른 수신 레벨의 가변성 무인 항공기, 장거리, 간섭 존재. 이러한 매개변수에는 집계, 재시도, MiMo 기술(STBC), 제어 프레임 데이터 속도 및 연결 해제 조건이 포함됩니다.
지능형 간섭 방지
ANAFI Ai는 간섭 발생 시 채널 삭제(2.4GHz 및 5GHz 이중 대역) 알고리즘을 가지고 있습니다.
적응 및 흐름 모니터링
ANAFI Ai는 4Hz 링크의 상태를 지속적으로 모니터링하고 간섭을 감지할 수 있습니다. 이를 통해 전송된 패킷의 대역폭과 크기를 동적으로 최적화할 수 있습니다. 또한 조종사가 특히 방해가 심한 환경에 있거나 신호를 잃어버리려고 하는 경우 경고합니다.
대역폭 감소
범위의 한계와 조건이 허용하는 경우 ANAFI Ai는 감도를 3dB 개선하고 범위를 40% 증가시키기 위해 10MHz 대역폭으로 전환할 수 있습니다.

라디오 표시기
비디오 방송
비디오 링크 표시기
비디오 스트림 최적화 알고리즘 구현
Parrot Gen4 스트리밍(4세대)
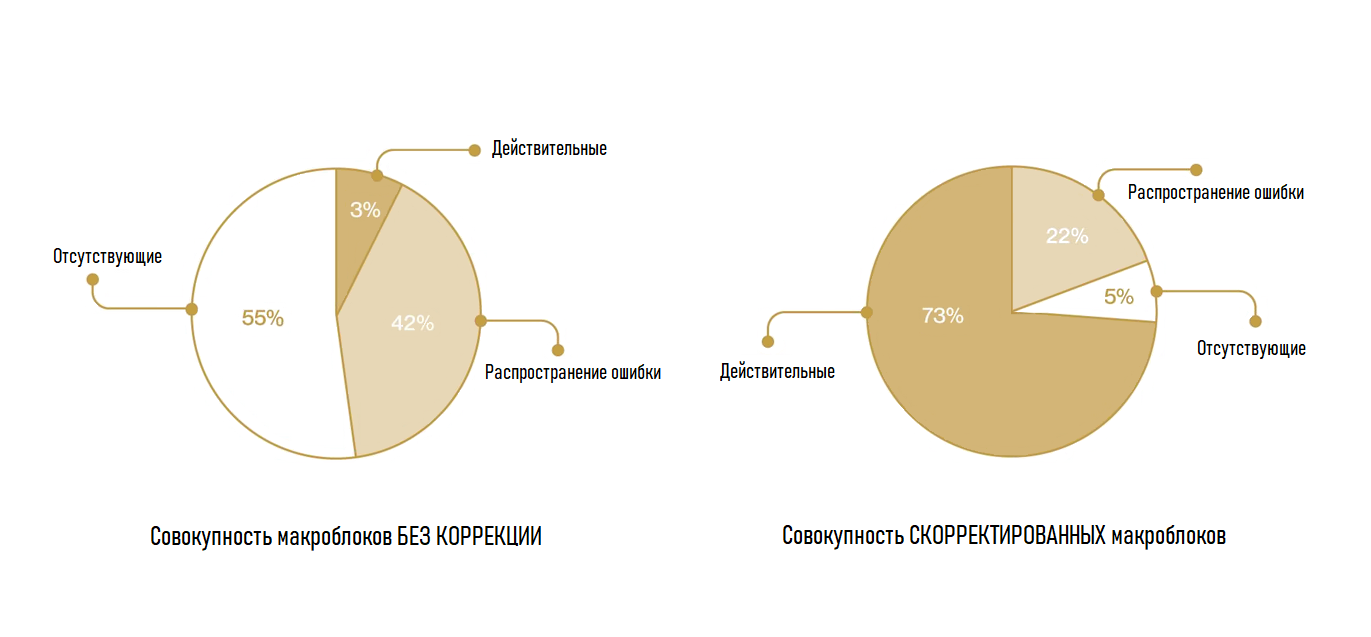
이 알고리즘은 네트워크 손실의 시각적 영향을 줄이고 상호 운용성을 제공합니다. 구문적으로 완전한 스트림을 제공하는 동안 모든 디코더: 그림의 누락된 부분은 참조 픽처의 것과 동일한 누락된 부분으로 재구성됩니다.
따라서, 손실되기 쉬운 영역에 결함이 포함되며 전체 이미지에 적용되지 않습니다.
아래 그래프는 ANAFI Ai 고급 스트리밍 기능이 있거나 없는 경우 5% 네트워크 손실에서 매크로블록 디코딩의 성공률을 보여줍니다. 이 알고리즘은 매크로블록의 75%에 대한 정확한 디코딩을 보장합니다. 이를 통해 사용자는 화면을 멈추거나 스트리밍을 잃지 않고 임무를 계속할 수 있습니다.
혼잡 제어
또한 알고리즘은 Wi-Fi 및 무선 환경을 평가하여 패킷 손실 및 네트워크 혼잡을 예상하고 방지하여 대기 시간을 줄이는 데 도움이 됩니다.알고리즘은 물리적 계층에서 데이터 속도와 오류율을 기반으로 계산된 채널 용량 추정치를 기반으로 합니다. 그런 다음 네트워크 코딩 및 캡슐화 매개변수에 영향을 줍니다.
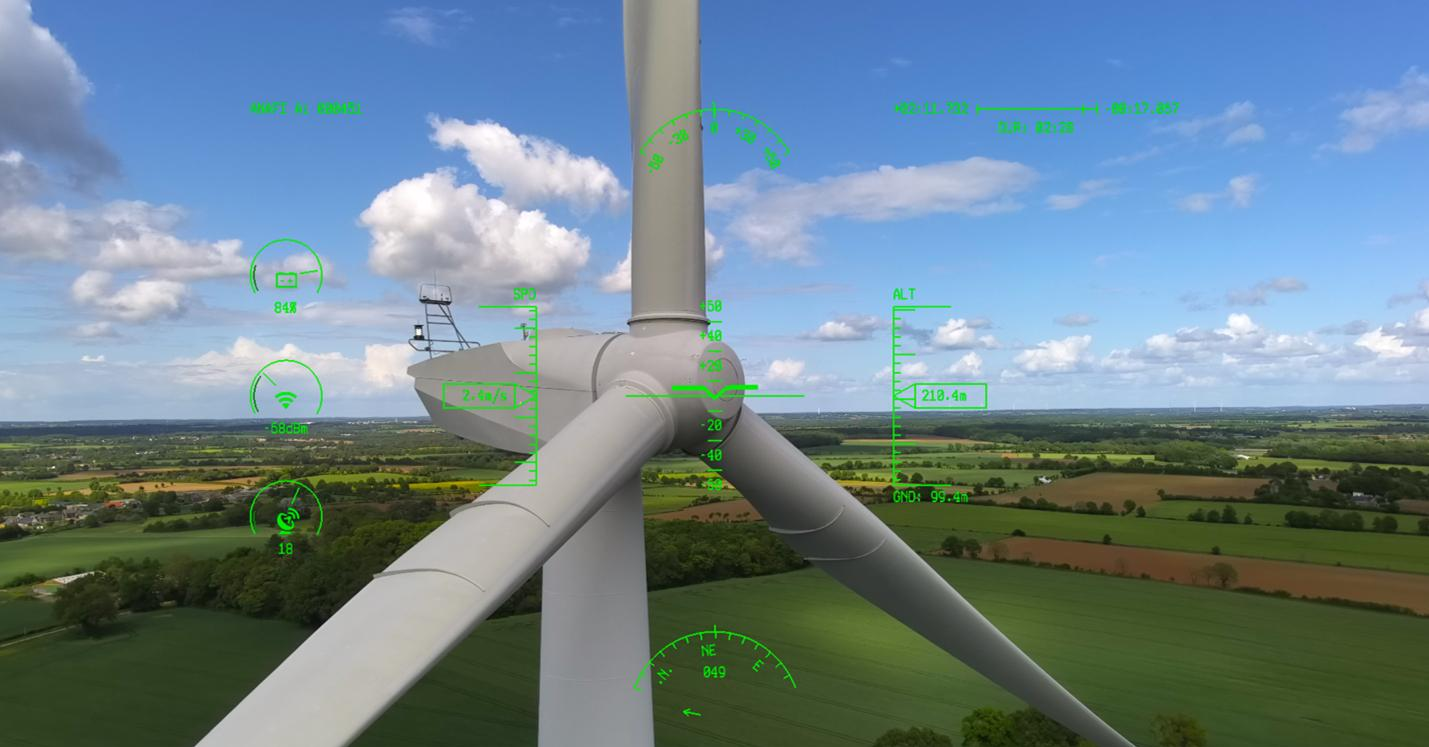
메타데이터
메타데이터는 비디오 스트림과 함께 전송된다. 특히 여기에는 드론 원격 측정 요소(위치, 고도, 속도, 배터리 잔량 등)와 비디오 메트릭(카메라 각도, 노출 값, 시야 등)이 포함됩니다.
이미지와 개방형 메타데이터의 동기화는 지도에서 정확한 위치 지정, HUD에서 비행 계기 추적 또는 증강 현실 요소 활성화의 기능을 수행합니다.
메타데이터는 표준 방법(RTP 헤더 확장)을 사용하여 포함됩니다. Parrot에서 정의한 데이터 형식은 오픈 소스입니다. ANAFI Ai SDK에서 사용할 수 있습니다.
카메라

48MP 센서
ANAFI Ai 매트릭스에는 상세한 항공 사진을 위한 메가픽셀.
4개의 인접한 픽셀 그룹이 동일한 색상을 갖는 Quad Bayer 컬러 필터 어레이 기술을 사용합니다. 따라서 4개의 인접한 픽셀에서 신호를 추가하여 사진 및 비디오 모드에서 실시간 HDR 캡처를 얻을 수 있습니다.
동적 범위는 표준 Bayer 행렬의 4배입니다. 복잡한 장면도 최소한의 하이라이트 또는 그림자 디테일로 촬영할 수 있습니다.
렌즈
ANAFI Ai 렌즈는 Parrot을 위해 특별히 개발되었습니다. 6개의 비구면 요소를 결합하고 광학 플레어를 줄이기 위해 최적화되었습니다. 이 렌즈는 표준 비디오 모드에서 68° HFoV, 표준 사진 모드에서 64.6° HFoV를 제공합니다.

비디오 모드
ANAFI Ai는 P-Log를 포함하여 초당 60프레임으로 부드러운 4K 비디오를 캡처하고 HDR10도 참조하십시오. 최대 30fps의 4K 비디오. 아래 표에는 모든 ANAFI Ai 비디오 모드가 나열되어 있습니다.

비디오 인코딩
사용자는 H.264(AVC)와 H.265(HEVC) 중에서 선택할 수 있습니다.
모든 해상도는 표준 모드 및 HDR8의 경우
- YUV420p (8-bpc BT.709 색 공간) 픽셀 형식을 사용합니다.
- YUVJ420p (8비트/구성 요소, 전체 범위 - BT.709 색 공간) P-로그 스타일용.
- YUV420p10 (10bpc BT.2020 색 공간) HDR10 기록용, H.265 전용.
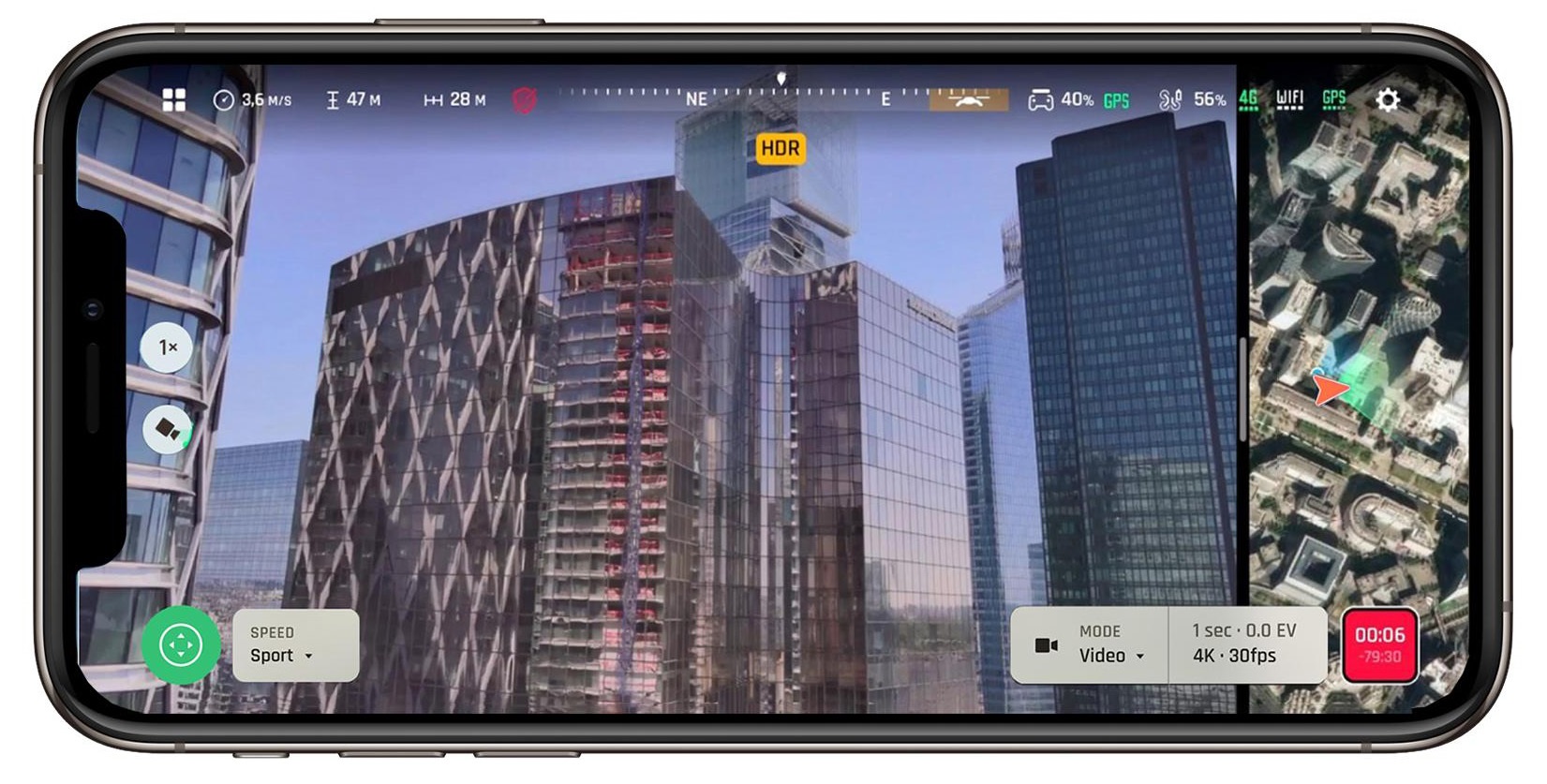
HDR
HDR8 및 HDR10으로 비디오를 녹화할 때 ANAFI Ai는 14EV의 동적 범위를 커버합니다. HDR10 형식은 최대 1000니트의 밝기와 10비트의 색심도를 제공합니다. 표준 다이나믹 레인지의 경우 1,600만 색상 범위에 비해 10억 색상 범위를 제공합니다. HDR8에 비해 HDR10은 대비가 증가하여 2배 이상 밝은 이미지를 생성합니다. HDR8은 모든 표준 화면에 표시할 수 있고 HDR10은 TV 및 HDR10 화면에 표시할 수 있습니다.
사진 모드
모드 설명
모드 제어 섹션에는 셔터가 릴리즈될 때마다 촬영되는 촬영 매수에 영향을 주는 설정이 포함됩니다..
단일 캡처 모드
표준 단일 캡처 모드. 각 셔터 릴리즈 후 캡처된 이미지는 시스템에서 즉시 처리됩니다.
브라케팅 모드
사용자는 프레임마다 노출을 다르게 하여 3, 5 또는 7 프레임을 연속으로 촬영할 수 있습니다. 다음 사전 설정을 사용할 수 있습니다.
- [-1 EV, 0, 1 EV] (기본 설정)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

버스트 모드
버스트 모드를 사용하면 사용자가 1초에 10프레임의 버스트를 촬영할 수 있습니다.
파노라마 모드
파노라마 모드에는 4가지 파노라마 샷이 포함됩니다.
- 구면(360 °) 파노라마 모드에는 구형 파노라마 촬영: Sphere / Little Planet / Tunnel.
- 가로 (180 °)
- 세로 (109 °)
- 슈퍼와이드 - 새로운 슈퍼 와이드 9 이미지 스티칭 모드(HFOV 110°, 직선 파노라마)
파노라마 모드 사양에 대한 자세한 내용은 아래 표를 참조하십시오.

타임랩스 모드
이 모드를 사용하면 다음과 같은 고정된 시간 간격으로 사진을 촬영할 수 있습니다.
- 48MP: 1, 2, 4, 10, 30 또는 60초.
- 12MP: 0.5, 1, 2, 4, 10, 30 또는 60초.
GPS 경과 모드
이 사진 모드는 검사 및 사진 측량을 위해 개발되었습니다. 5, 10, 20, 50, 100 또는 200미터의 고정된 거리 간격으로 사진을 찍을 수 있습니다.
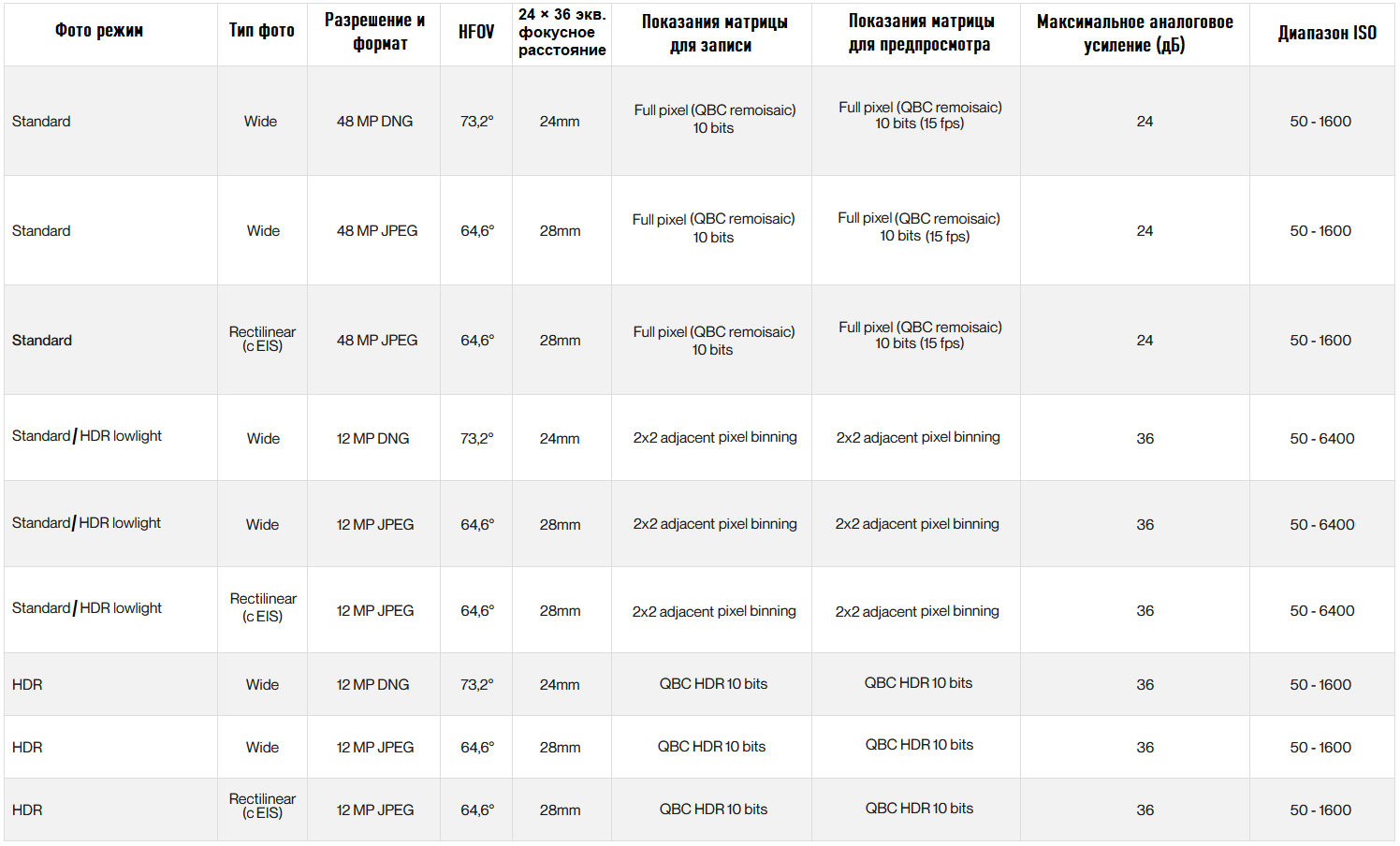
아래 표는 센서 판독 모드를 포함한 정지 이미지 캡처 모드 및 해상도를 보여줍니다.
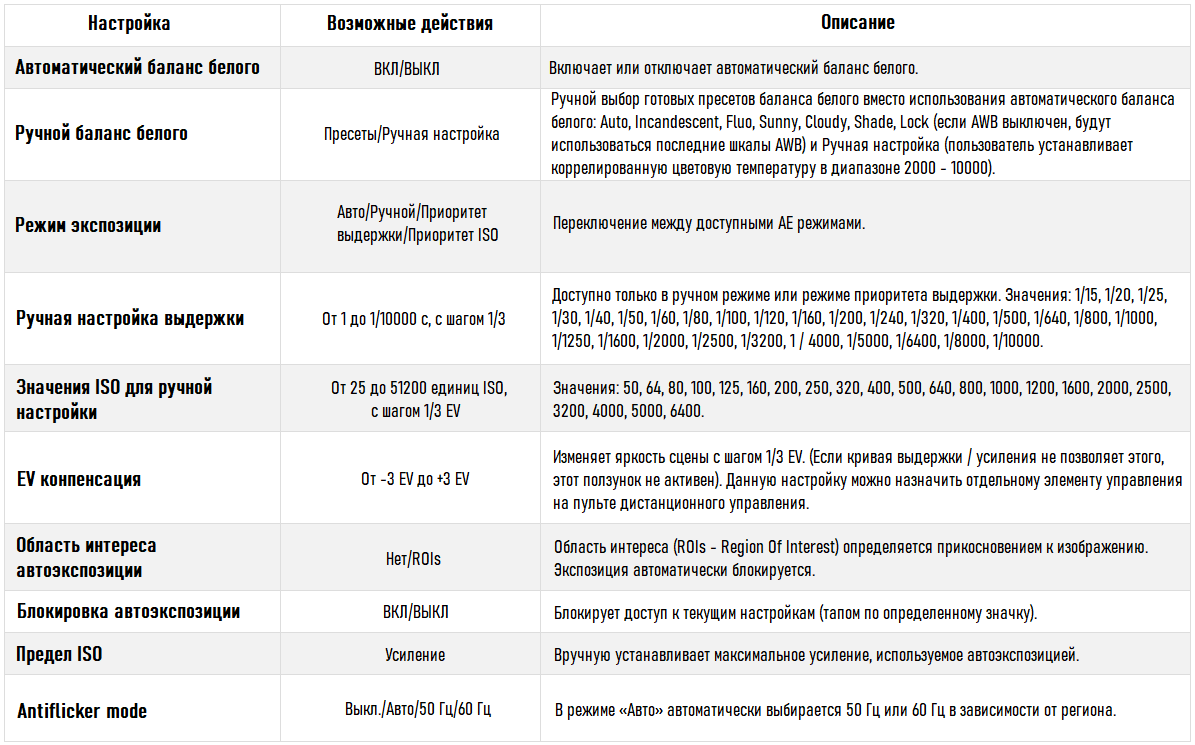
설정
다음에서 표에는 각 모드에 사용할 수 있는 설정이 나열되어 있습니다.
6배 줌
줌은 모든 사진 및 비디오 모드에서 사용할 수 있습니다. 48메가픽셀 센서와 결합된 정밀 샤프닝 알고리즘은 6배 디지털 줌을 사용할 때도 고화질 이미지를 생성합니다. ANAFI Ai 사용자는 이제 75m 떨어진 곳에서 1cm의 디테일을 볼 수 있으며 높은 픽셀 수를 통해 4K 비디오를 품질 손실 없이 1080p로 자를 수 있습니다.

하이브리드 안정화
ANAFI Ai는 마이크로 UAV 시장에서 가장 정확한 안정화를 가지고 있다.
결합된 안정화:
- 3축 기계식(3축 기계식.짐벌)
- 전자식 3축(EIS)
기계적 안정화는 드론의 비행 위치에 관계없이 카메라 포인팅 축을 안정화합니다. 전자식 손떨림 보정은 기계식 드라이브가 처리할 수 없는 100Hz 이상의 주파수에 대한 미세 진동 효과를 수정합니다.
메인 카메라 짐벌
기계적 안정화를 사용하면 카메라 뷰의 수평 축을 3축 모두에서 안정화하고 방향을 지정할 수 있습니다.
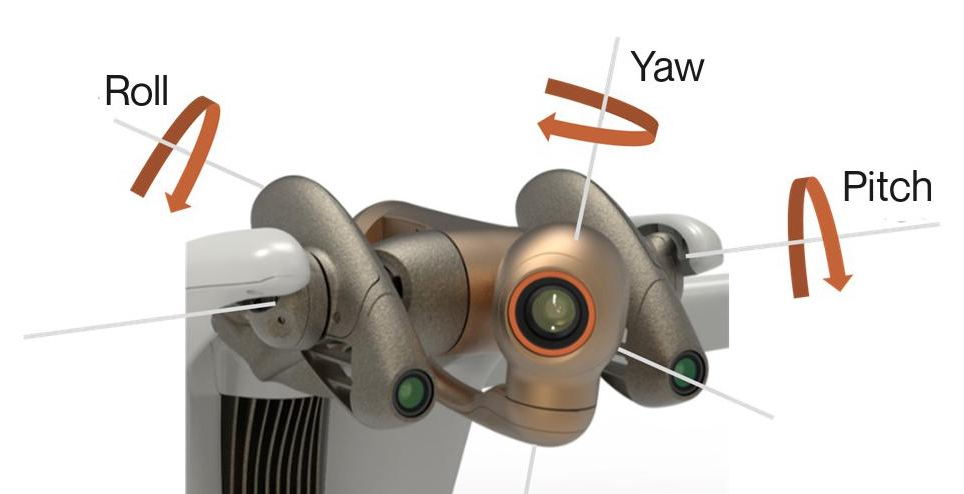 3축 회전 메카. 메인 카메라 ANAFI Ai의 정지.
3축 회전 메카. 메인 카메라 ANAFI Ai의 정지. 주요 기능
- 메인 카메라용 3축 기계식 짐벌
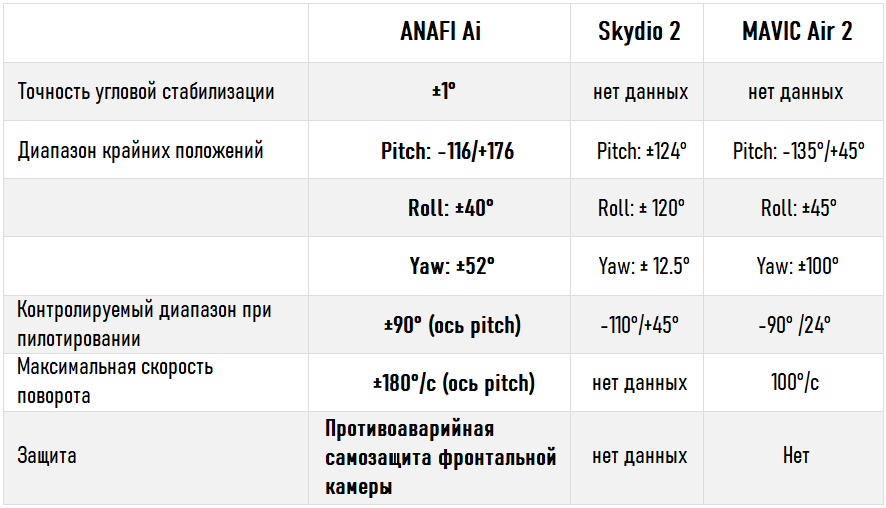
- 수직 오프셋 292°, 시야각 -116° ~ 176°
짐벌 성능
- EIS 알고리즘은 광각 렌즈의 워블 및 왜곡 효과를 보정하고 3축 디지털도 수행합니다. 이미지 안정화(롤, 피치 및 요).
- 이 방법은 이미지의 기하학적 변환을 적용하는 것으로 구성됩니다. 기하학적 변환은 IMU 덕분에 타임 스탬프 및 정확한 위치와 연결됩니다.
- 측정된 카메라 유닛의 광학적 왜곡, 진동 및 움직임에 따라 각각의 이미지에 기하학적 변환을 적용한다.
피벗 범위 292°
카메라의 수평 피벗 범위는 피치 축을 중심으로 -116° / 176°이므로 드론 위와 아래를 관찰할 수 있습니다. 시장 마이크로 UAV에 대한 독특한 기회.

사진 측량
무인 항공기를 이용한 항공 사진은 전문가가 검사 및 측량을 수행하는 방식을 바꾸고 있습니다. 사진 측량 방법은 UAV가 수집한 이미지를 처리하여 2D 및 3D 모델을 생성하는 데 사용되며, 이를 통해 나중에 고객이 적시에 조사 대상의 유지 관리 일정을 잡을 수 있습니다.
4G는 드론 데이터 링크의 전례 없는 신뢰성을 제공합니다. 사용자는 통신 손실에 대한 두려움 없이 금속 구조물, 건물 근처의 넓은 지역에서 UAV를 작동할 수 있습니다.
검사 및 매핑
ANAFI Ai 드론의 AI를 PIX4Dinspect 온라인 플랫폼과 결합하여 사용자가 수행할 수 있습니다. 그 어느 때보다 빠르고 효율적으로 검사를 수행하거나. 기계 학습 알고리즘은 기지국의 안테나를 인식하고 크기, 높이, 기울기, 방위각 및 수직도를 결정합니다.
ANAFI Ai로 생성된 데모 3D 모델을 보려면 아래 이미지를 클릭하십시오.
예 #1

예 #2
동급 최강 행렬
ANAFI Ai 드론의 카메라에는 Quad Bayer 컬러 필터 기술을 사용하여 제작된 48MP 1/2인치 CMOS 센서가 장착되어 있어 그 어느 때보다 검사 및 사진 측량에 적합합니다.사용된 매트릭스를 사용하면 넓은 다이나믹 레인지로 상세한 이미지를 얻을 수 있습니다.
고해상도 사진
ANAFI Ai는 48메가픽셀 정지 이미지를 생성할 수 있으므로 모든 세부 사항을 고해상도로 캡처하고 고밀도 포인트 클라우드를 생성합니다.
상당한 선명도
검사 임무에는 일련 번호, 커넥터, 녹 얼룩 및 초기 균열과 같은 미세한 세부 사항을 식별하는 능력이 필요합니다.
넓은 동적 범위
표준 모드에서 10스탑 동적 범위, HDR 모드에서 14스탑. 일관된 클라우드 포인트와 고품질 2D 또는 3D 재구성을 생성하려면 최적의 이미지 그라데이션이 필수적입니다.
1인치 센서보다 55% 더 자세한 정보
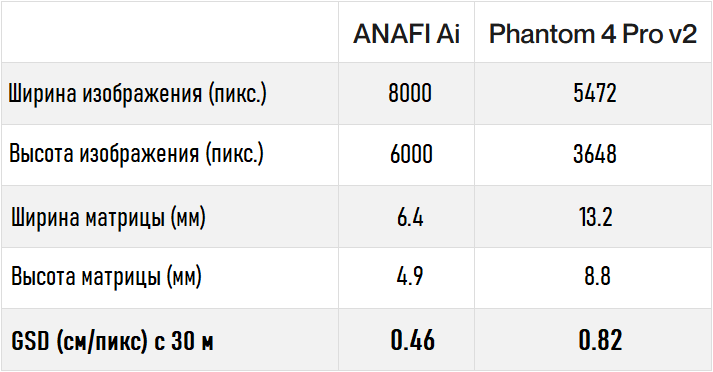
ANAFI Ai 드론의 48MP 1/2인치 쿼드 베이어 센서는 여러 분야에서 사용되는 20MP 1인치 센서보다 더 선명합니다. 현대 전문 드론. 같은 높이에서 ANAFI Ai와 DJI Phantom 4 Pro V2.0 지붕 검사의 다음 이미지는 이 사실을 분명히 보여줍니다.

검사에 이상적
ANAFI Ai 짐벌에는 비행 변동을 보상하고 이미지 선명도를 보장하는 6축 하이브리드(기계 전자) 안정화 시스템이 포함되어 있습니다. ANAFI Ai 카메라는 -90°에서 90°까지 조정 가능한 범위가 있어 교량 바닥의 아래쪽을 보기 위한 이상적인 공중 장비입니다.
제어 가능한 기울기 ± 90 °
정확도
ANAFI Ai를 사용하면 사용자가 30m 높이에서 0.46cm/px의 GSD를 달성할 수 있습니다. 이는 최대 0.92cm의 상대 정확도를 의미합니다.
비교를 위해 동일한 높이 에서 DJI 팬텀 4 Pro V2 는 0.82cm/px의 GSD를 제공합니다. 즉, ANAFI Ai는 동일한 대상을 매핑할 수 있으며 Phantom보다 1.5배 이상 더 높은 수준으로 동일한 수준으로 비행합니다.
AI 및 4G 기능
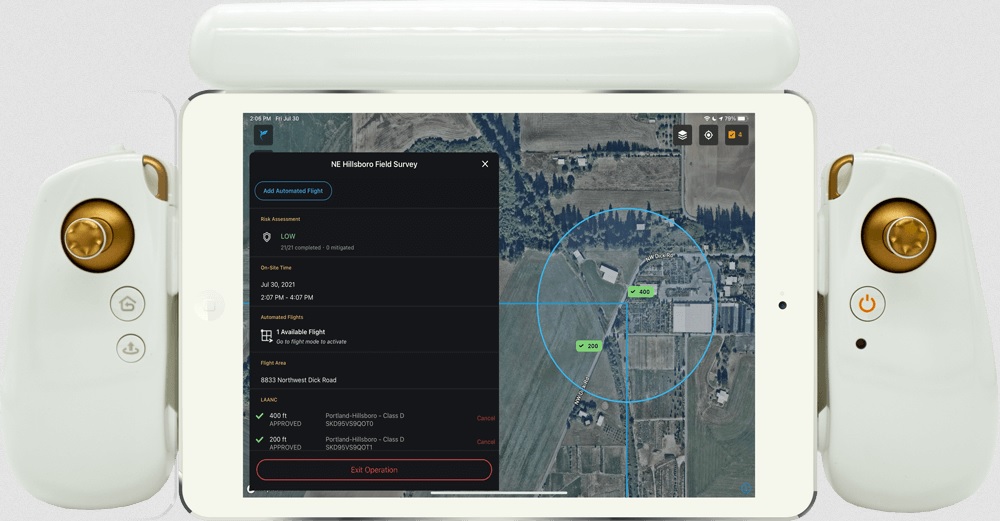
하나의 앱. 모든 비행 계획
FreeFlight 7 모바일 앱의 잠재력을 통해 사용자는 모든 측량, 검사 및 사진 측량 임무를 시작할 수 있습니다.

사용 가능한 사진 측량 비행 모드
이제 FreeFlight 7 모바일 애플리케이션에서 다음 사진 측량 비행 모드를 사용할 수 있습니다.
- Grid
- 이중 그리드
- 원형
탭 한 번으로 비행 계획 생성
FreeFlight 3D 대화형 지도에서 탭 한 번이면 충분합니다. 빠른 스캔 건물을 위해. 인공 지능이 최적의 비행 매개변수와 궤적을 자동으로 결정합니다. ANAFI Ai 센서(IMU, GNSS 및 비행 시간)의 정확한 지리 참조가 포함된 48MP 이미지는 정확한 3D 재구성을 가능하게 합니다.
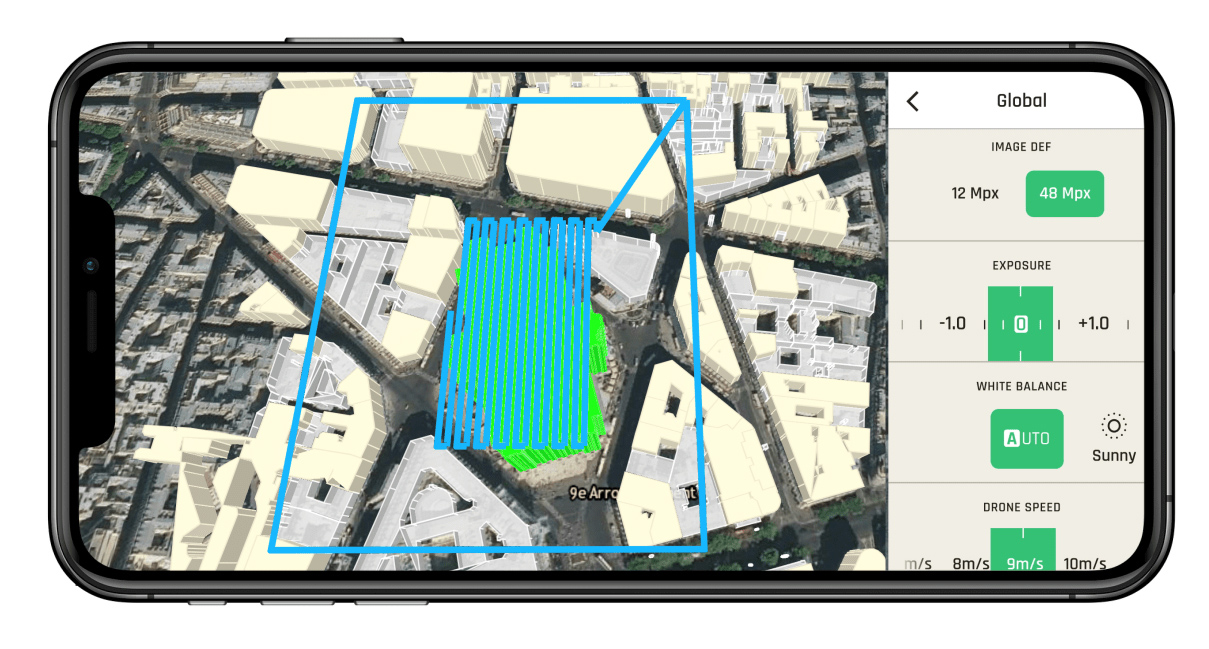 3D 토지 등록에서 한 번의 탭으로 생성된 자동 비행 계획.
3D 토지 등록에서 한 번의 탭으로 생성된 자동 비행 계획. - FreeFlight 7의 지도 제작 배경은 ArcGIS 소프트웨어에서 가져왔습니다. 3D 건물 표현은 전 세계 도시를 다루는 OpenStreetMap 데이터를 기반으로 합니다.
- 시각화 시스템은 주어진 비행 계획의 안전을 보장합니다. 사용자는 장애물에 대해 걱정할 필요가 없습니다. ANAFI Ai는 이를 자율적으로 피합니다.
자율 비행
ANAFI Ai 전방향 센서 시스템은 입체 비전을 기반으로 하여 자동으로 이동 방향으로 방향을 지정합니다.

드론은 30미터 거리의 장애물을 감지하고 AI 기술은 주어진 비행 계획을 실행하는 동안 채우기 그리드를 지속적으로 구축하고 업데이트합니다. 복셀로 드론 환경을 나타냅니다.
알고리즘은 드론이 목표물인 할당된 비행 임무에 계속 초점을 맞추는 동안 장애물과의 충돌을 피하기 위한 최상의 궤적을 결정합니다.

4G 연결
ANAFI Ai는 4G 모듈을 탑재한 최초의 상용 마이크로드론이다. 전 세계적으로 사용되는 주파수의 98% 이상을 커버합니다.

고압 전력선 조사. ANAFI Ai로 촬영하고 Pix4Dmatic으로 편집했습니다. 장면 크기: 4060 × 60 × 70 m 이미지 수: 2172 GSD: 1.3 cm / pix. 높이: 90m 전면/측면 겹침: 90% / 65%.
무인 항공기는 Wi-Fi에서 4G로 또는 그 반대로 원활하게 전환할 수 있으므로 가장 안정적인 연결을 제공하여 다음을 보장합니다.
- BVLOS 비행 수행
- 장애물 및 건물이 있는 환경에서 비행 시에도 안정적인 연결
- 높은 소음 환경에서 안전한 비행
- 비디오 링크 품질 1080p @ 30fps
- 클라우드 서버에 이미지 직접 업로드

비행 시간 최적화
개발자에 따르면 높은 이미지로 인해 상당한 시간 절약이 달성되었습니다. ANAFI Ai의 특성:
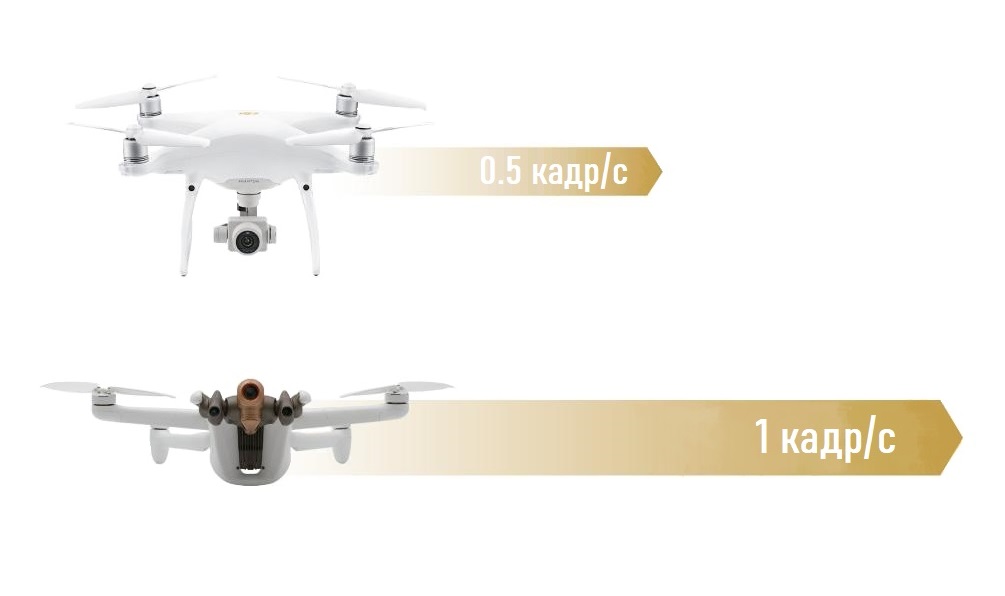
- 48MP를 통해 드론은 동일한 GSD를 달성하면서 20MP 1인치 센서가 있는 드론보다 1.5배 이상 더 높이 날 수 있습니다. 즉, 더 높은 고도와 더 빠른 임무는 함께 가야 합니다.
- 1fps 사진 촬영: ANAFI Ai는 Autel EVO 2 및 DJI Phantom 4 Pro V2.0 보다 두 배 빠른 속도로 촬영합니다.
PIX4Dcloud로 4G 기내 전송
드론의 항공 사진에서 디지털 모델을 만들고 파일을 전송하고 처리하는 과정에서 사진은 시간이 많이 걸리는 작업입니다. ANAFI Ai는 사용자가 워크플로 속도를 높이는 데 도움이 됩니다. 특히, 드론 시스템은 다음을 허용합니다.
- 드론의 4G 연결을 사용하여 비행 중에 직접 보안 서버로 이미지를 전송합니다.
- 비행이 끝나면 즉시 정사모자이크, 포인트 클라우드, 고도 모델 및 텍스처 메쉬와 같은 개체 계산을 시작합니다.
- 직원 및 고객과 2D 지도 및 설문조사 품질 3D 모델을 쉽게 공유합니다.

PIX4D 제품군 호환성
ANAFI Ai는 이제 다음으로 구성된 고유한 모바일, 데스크탑 및 클라우드 사진 측량 애플리케이션 제품군과 완벽하게 호환됩니다.]
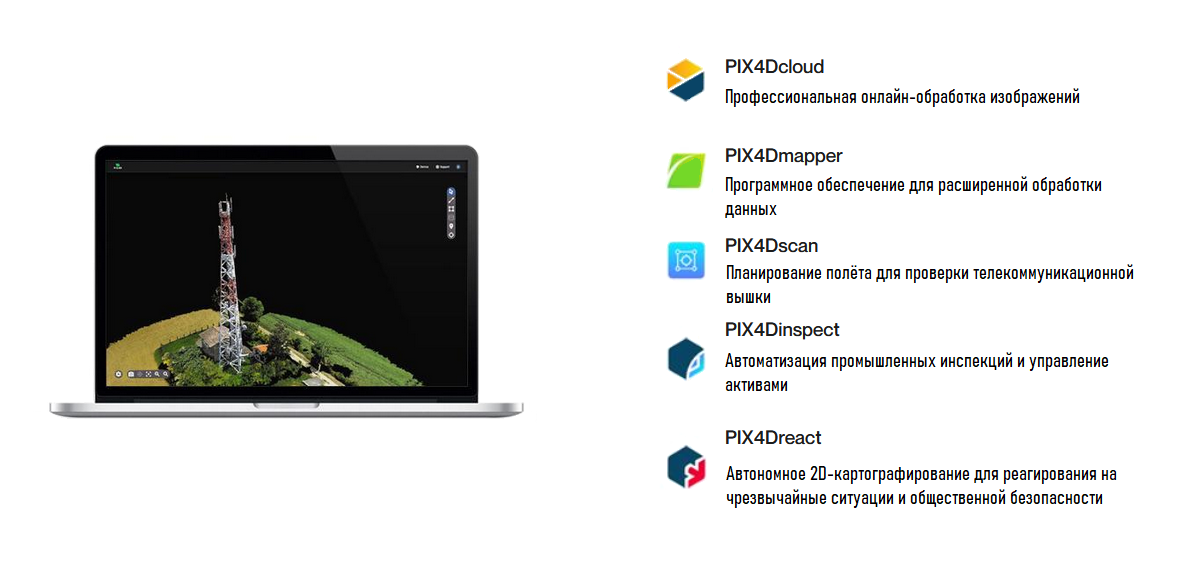
사진 측량 또는 라이더
측량 및 검사에 사진 측량을 선택하는 이유는 무엇입니까? 접근성 및 사용 용이성 외에도 항공 사진 측량은 데이터의 시각적 해석이 필요할 때 가장 좋은 선택입니다.
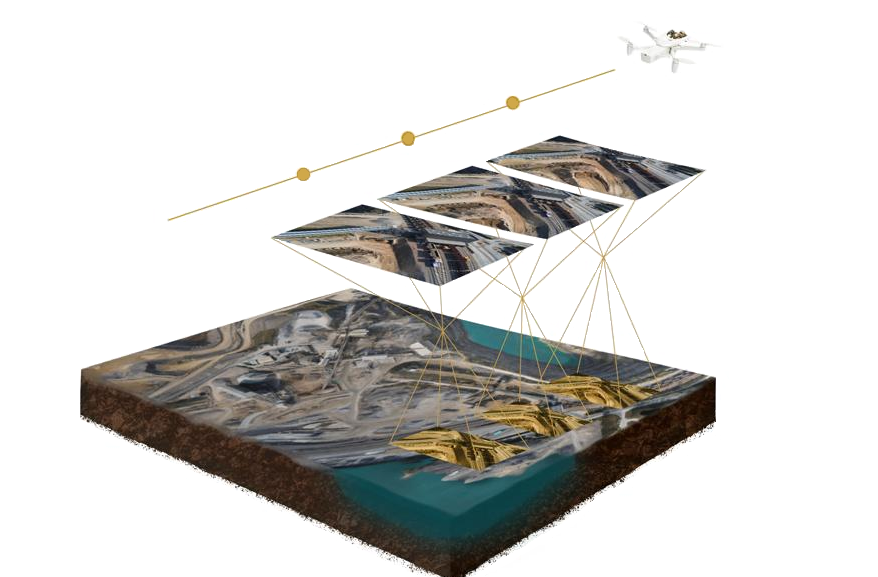
사진 측량 전문가
- 정사모자이크, 컬러 포인트 클라우드, 텍스처 메쉬 등 여러 시각화를 제공합니다.
- 상당한 양의 정보(높이, 질감, 색상)를 포함하는 더 높은 밀도의 점 구름을 만듭니다.
- 사실적인 2D 및 3D 렌더링의 정확도에서 LIDAR를 능가합니다. LIDAR는 높은 수준의 컨텍스트 세부 정보를 제공하지 않습니다.
LIDAR 단점
- RGB 매트릭스가 있는 UAV보다 비용이 100배 더 높습니다.
- 데이터 처리의 복잡성 및 가능한 해석 오류.
- 색상 정보를 추가할 수는 있지만 과정이 복잡하다.
- LIDAR는 포인트 클라우드만 생성하며 특정 사례 및 상황을 위한 것입니다.
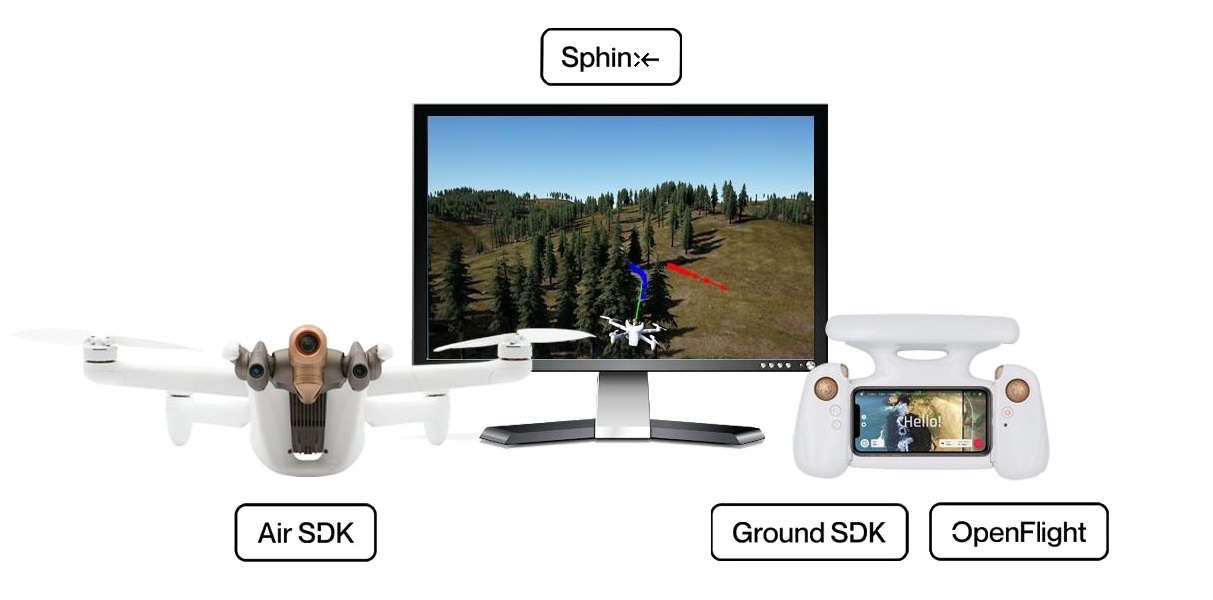
SDK
Parrot 소프트웨어 개발 키트는 개발자용 도구 및 소프트웨어의 오픈 소스 세트입니다. 최초의 드론 A. R. 회사의 오픈 소스 소프트웨어인 Drone은 개발자 플랫폼과 도구를 지원하며 Parrot
개발자는 회사의 모든 SDK 리소스를 등록 및 추적 없이 포털 " Parrot에서 무료로 사용할 수 있음을 명시합니다. 개발자 포털"... Parrot 포럼 에서 수천 명의 개발자와 함께 회사의 엔지니어와 직접 현재 주제에 대해 논의할 수도 있습니다.
Air SDK
ANAFI Ai에서 코드 실행
Air SDK는 코드 다운로드 및 실행을 위한 혁신적인 기술 아키텍처 제공 ANAFI Ai에서 직접. 개발자는 모든 드론 센서, 연결 인터페이스 및 자동 조종 기능에 액세스하여 맞춤형으로 설계된 비행 임무를 프로그래밍할 수 있습니다.
Air SDK는 다음 항목에 대한 온보드 액세스를 제공합니다.
- 모든 센서(IMU, GPS, TOF) 및 비행 모드
- 비디오 스트림 및 메타데이터 모든 카메라 포함
- 통신 인터페이스 Wi-Fi, 4G, USB
- 깊이 맵 및 채우기 그리드
- 장애물 회피 궤적 생성
모든 개발자는 다음을 수행할 수 있습니다.
- 비행 임무를 생성하여 드론 상태 변경
- 탐색 모드 변경
- 임베디드 Linux 프로세스 추가(예를 들어 4G 채널을 통해 데이터를 전송하거나 컴퓨터 비전을 사용)
Air SDK는 C 또는 Python 프로그래밍 언어를 지원합니다. Air SDK는 자세한 설치 가이드 및 API 문서와 함께 제공됩니다. 많은 응용 사례가 고유한 아키텍처가 제공하는 모든 가능성을 보여줍니다.
Ground SDK
강력한 모바일 앱 빌드
Ground SDK는 GCS(Ground Control Station) 소프트웨어 플랫폼입니다. 모바일 장치용(iOS 및 Android 모두 지원됨). 이를 통해 모든 개발자는 모바일 장치에서 직접 드론을 후속 제어하기 위해 ANAFI Ai용 모바일 애플리케이션을 만들 수 있습니다. 모든 BVS 기능(제어, 비디오, 설정)은 사용하기 쉽고 완전히 문서화된 API를 통해 사용할 수 있습니다.
OpenFlight
오픈 소스 지상 관제소
처음으로 Parrot은 지상 관제소 애플리케이션을 위한 소스 코드를 엽니다. OpenFlight는 유명한 오픈 소스 FreeFlight 7 앱의 핵심입니다. 이를 통해 개발자는 자신의 기능을 추가하는 데 집중하고 AppStore에 게시할 준비가 된 전문가 수준의 앱을 즉시 보유할 수 있습니다.

OpenFlight 포함:
- 모든 UX FreeFlight 7
- 모든 인터페이스 설정
- 장애물의 실시간 3D 시각화를 위한 코드
- 4G 통신 관리를 위한 코드
- OpenFlight는 완전한 설치 가이드 및 포괄적인 문서와 함께 BSD-3 라이선스로 발행됩니다.
스핑크스
3D 실사 시뮬레이션
Parrot Sphinx는 고급 드론 시뮬레이션 도구입니다. Parrot 엔지니어는 이를 사용하여 모든 ANAFI Ai 기능을 개발하고 테스트합니다. 일반적인 개념은 시각적, 물리적으로 사실적인 환경에서 모든 센서로 드론의 실제 펌웨어를 시뮬레이션하는 것입니다.

Parrot Sphinx 허용:
- 모든 카메라 및 센서 시뮬레이션
- 깊이 맵 및 분할 시뮬레이션 이미지
- 많은 사실적인 3D 장면 탐색
- 다양한 유형의 리모콘에 연결
- 스크립트를 사용하여 시뮬레이션 제어
- 보행자 및 차량 추가
- 비행 데이터 시각화 및 기록
- 항공기 센서 및 주변 물리적 요소 조정
- 실시간 계수 제어
Parrot Sphinx는 고급 표준을 기반으로 구축됨 구성 요소:
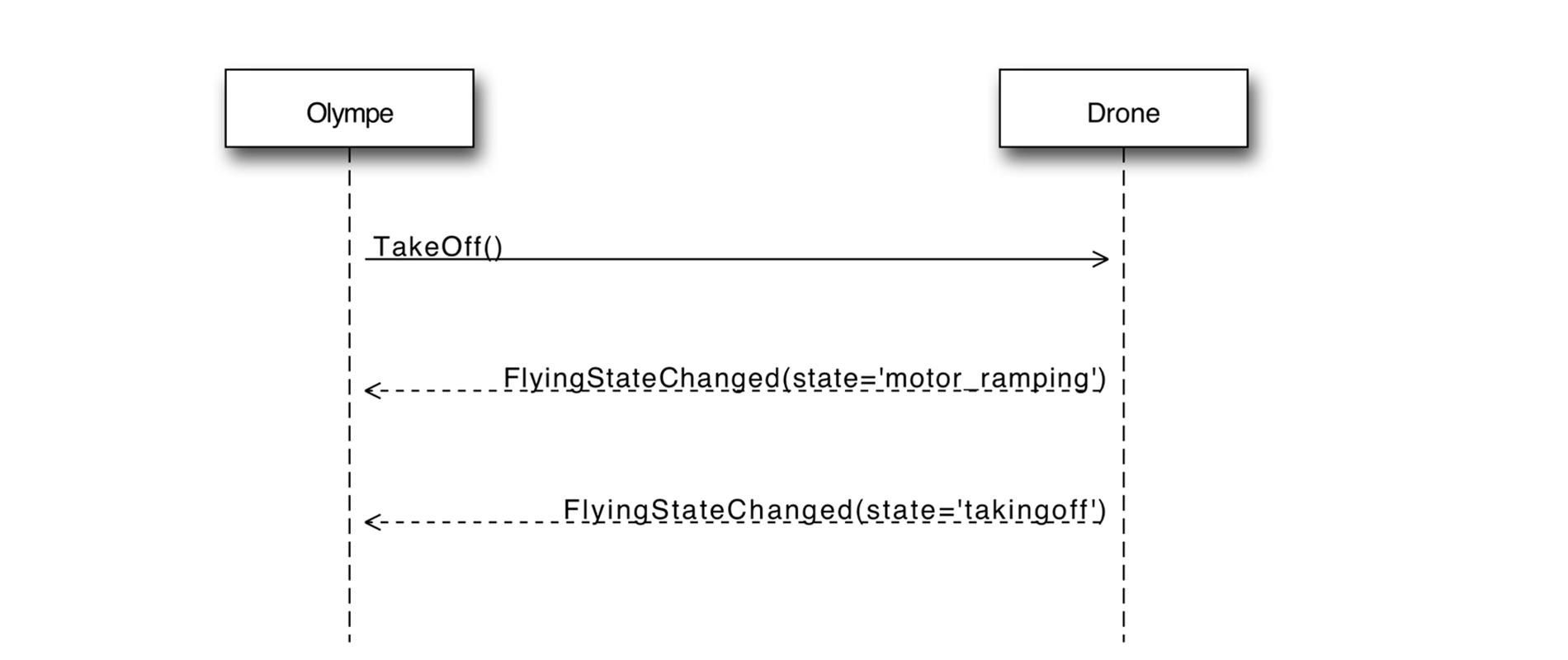
Olympe
ANAFI Ai를 제어하는 Python
Olympe는 ANAFI용 Python 컨트롤러 프로그래밍 인터페이스를 제공합니다. 일체 포함. Olympe의 원래 목적은 Sphinx 모델링 환경과 상호 작용하는 것이었습니다. Olympe는 원격 컴퓨터에서 물리적 ANAFI Ai를 제어할 수도 있습니다.
Olympe 프레임워크는 다음을 허용합니다.
- 시뮬레이션 또는 물리적 ANAFI Ai에 연결
- 명령 메시지 보내기(조종, 카메라 방향, 집으로 돌아가기), 비행 계획)
- 모든 카메라에서 스트리밍 비디오 시작 및 중지
- 비디오 스트림 및 동기화된 메타데이터 녹화
) PdrAW
고급 미디어 플레이어
PDrAW는 ANAFI Ai 미디어용 고급 비디오 뷰어입니다. 뷰어는 Linux, macOS, Android 및 iOS 플랫폼에서 스트리밍(RTP/RTSP) 및 녹화된(MP4) 비디오를 모두 지원합니다. PDrAW는 라이브러리(libpdraw), 래퍼 라이브러리(libpdraw-backend) 및 독립 실행형 실행 파일(pdraw)로 제공됩니다.
PDrAW는 비디오 메타데이터도 관리한다. ANAFI Ai에서 스트리밍 및 녹화된 비디오에는 모두 공개적으로 사용 가능하고 문서화된 메타데이터가 포함되어 있어 고급 항공 비디오 처리가 가능합니다.
모델 C. A. D.
Parrot은 신속한 프로토타이핑 및 액세서리 통합을 위해 CAD 설계에 통합하기 위해 드론의 3D 모델을 제공합니다.
MAVLink 및 GUTMA 호환성
ANAFI Ai는 UAV와 제어 스테이션 간의 실시간 데이터 교환을 허용하는 표준 오픈 소스 MAVLink v1 프로토콜과 호환됩니다. ANAFI Ai는 수동으로 제어하거나 QGroundControl과 같은 MAVLink 호환 기지국에서 자동 비행 계획을 사용하여 제어할 수 있습니다.
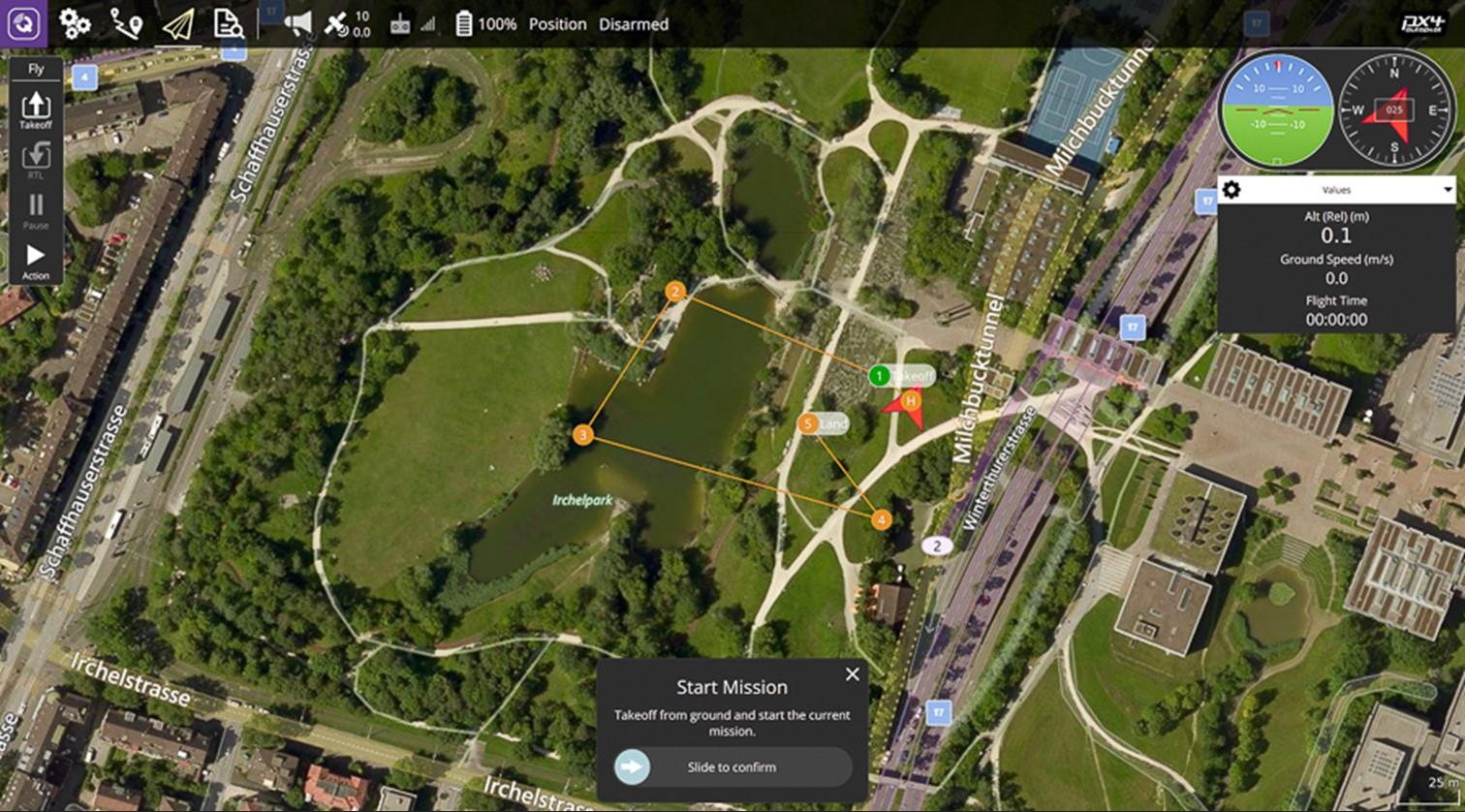
* QGroundControl 인터페이스
ANAFI Ai는 오픈 소스 GUTMA 표준 비행 데이터 프로토콜과 호환됩니다. Global UTM Association은 항공 교통 관제 분야의 주요 업체로 구성된 컨소시엄입니다.

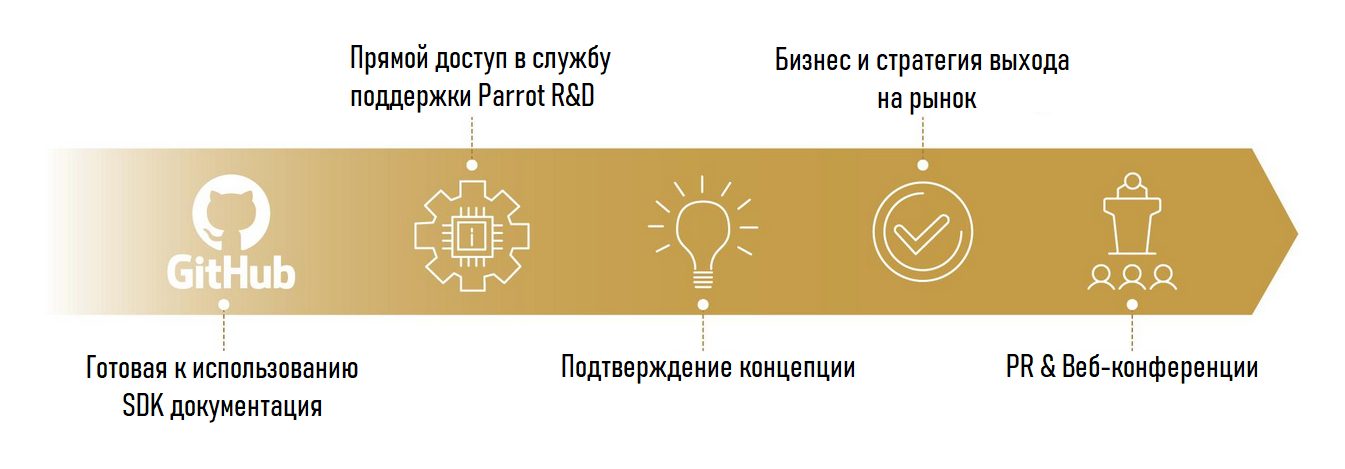
최대 드론 파트너 생태계 Parrot
Parrot은 파트너 SDK 프로그램을 통해 드론 소프트웨어 제공업체의 글로벌 생태계를 지속적으로 확장하고 있습니다. 전문 사용자의 증가하고 진화하는 요구 사항에 대한 전문화되고 고유한 솔루션을 제공합니다.
모든 비즈니스 요구에 맞는 Parrot
검사 프로세스를 최대한 활용하기 위해 Parrot은 고객에게 함대 관리, 편집 비행에 이르는 호환 가능한 드론 소프트웨어 에코시스템을 제공합니다. 촬영, 매핑, 모니터링 및 수신 데이터 분석 전에 비행 로그의 계획 및 가져오기.
PIX4D × Parrot
2D/3D 모델링 애플리케이션. 모바일, 데스크탑 및 클라우드 사진 측량 애플리케이션의 고유한 세트입니다.
Verizon x Skyward x Parrot
미국의 4G LTE 드론 솔루션. Skyward 소프트웨어가 사전 설치된 Verizon 4G LTE 네트워크에 연결된 최초의 ANAFI Ai 로봇 드론. 실시간에 가까운 데이터 전송, 원격 배포 및 시야 밖의 비행을 위한 문을 엽니다.

Skyward × Parrot
ANAFI 용량 내 통합 및 학습. 영공, LAANC 액세스, 훈련, 장비 및 엔터프라이즈 드론 함대 배치를 위한 연결을 포함한 항공 관리 플랫폼입니다.

DroneSense × Parrot
드론 프로그램을 구축, 관리 및 확장합니다. 공공 안전 부문의 무인 항공기 전문가는 긴급 구조원의 요구를 위해 특별히 설계된 전체 DroneSense 기능 제품군을 사용할 수 있습니다.

Parrot Ecosystem Partners

Parrot Affiliate Program
개발자가 제공하는 기능 확장 SDK를 통합하여 드론을 위한 그의 프로그램.
사이버 보안
데이터 기밀성
개발자가 수집하지 않는다는 점 사용자의 동의 없이 모든 데이터. 데이터를 Parrot 인프라로 전송할지 여부에 대한 결정은 전적으로 사용자 자신에게 달려 있습니다. Parrot에서 호스팅되는 데이터를 통해 사용자는 다양한 장치 간에 비행 데이터와 비행 계획을 동기화할 수 있을 뿐만 아니라 지원을 촉진하고 Parrot이 제품을 개선할 수 있습니다.
ANAFI Ai는 유럽 연합의 일반 데이터 보호 규정(GDPR)을 준수하며 더 나아가 예를 들어 클릭 한 번으로 모든 데이터를 삭제할 수 있으므로 사용자가 가장 쉽게 제어할 수 있습니다.이 원클릭 문제는 FreeFlight7 모바일 애플리케이션 또는 Parrot. Cloud 계정의 개인 정보 설정에서 해결됩니다. 따라서 사용자는 언제든지 데이터 교환을 중단할 수 있을 뿐만 아니라 쉽게 삭제를 요청할 수 있습니다.
사용자가 데이터 교환에 동의하는 경우 데이터 처리는 Parrot 개인정보 보호정책에 자세히 설명된 완전히 투명한 형식으로 수행됩니다.
ANAFI Ai가 4G를 통해 Skycontroller 4에 연결되면 Parrot 인프라를 사용하여 드론과 조종기를 페어링합니다. 사용자가 Parrot. Cloud 계정에 로그인하지 않은 경우에도 고유한 임시 계정으로 4G 연결을 사용할 수 있습니다. 4G 페어링을 위해 Parrot의 인프라를 사용할 때 드론과 조종기 간에 합의된 키를 사용하여 비디오가 암호화되며 Parrot은 암호화되지 않은 비디오에 액세스할 수 없습니다.

FIPS140-2 호환 및 CC EAL5 보안 요소
ANAFI Ai에는 NIST 호환 Wisekey 보안 요소가 내장되어 있습니다. FIPS140-2 레벨 3 및 Common Criteria EAL5 인증. Skycontroller 4 제어 하드웨어에도 유사한 보안 요소가 내장되어 있습니다.
보안 요소 기능:
- 암호화 작업 수행
- 기밀 정보 저장 및 보호
- 해당 서명된 이미지는 표시된 무인 항공기에 의해 촬영되었습니다.
- 이미지 자체도 메타데이터도 처리되지 않았습니다(자발적이든 아니든) - EXIF 및 XMP라고도 하는 메타데이터에는 이미지의 날짜, 시간 및 위치에 대한 정보가 포함되어 있습니다.
- 항공기 일련 번호
- 배터리 일련 번호
- 항공기 및 배터리 펌웨어 버전
- 항공기 및 배터리 하드웨어 버전
- 장치 모델
- FreeFlight 7 릴리스 버전
- 경고: 배터리, 자동 조종 장치, 센서
- 통신: 연결/연결 해제, 스트리밍 시작, 간섭 경고, 약한 신호
- 카메라: 스트리밍 통계, 설정 변경
- 비행: 상태 변경(이륙, 착륙, 호버링 등), 비행 작업 활성화(비행 계획, 사진 측량)
- Timelapse-스냅샷 및 (2분에 한 번)
- 딥 러닝(더 많은 물체 매핑, 비행 자율성 향상을 위한 풍경, 추적, 장애물 회피)
- 스테레오비전(깊이 맵)
- 트리거된 이미지 이벤트별
- 정확한 호버 구문의 시작과 끝, 정확한 착륙
- 드론 충돌
- 전송 중 얼굴이 자동으로 흐려짐
- 비행시간 32분 이상
- 동체의 최적화된 공기역학적 특성과 ANAFI Ai 추진 시스템 덕분에 전진 비행 시 최대 속도는 61km/h, 측면 비행 및 후방 비행 58km/h
- 최대. 바람 저항 12.7m / s.
- 모터/프로펠러의 높은 토크 효율과 높은 배터리 자율성 덕분에 주행거리는 22.5km(고요한 날씨에 50km/h의 일정한 속도로)입니다.
- 2 × IMU (ICM-40609-D 및 ICM42605)
- 자력계 LIS2MDL
- GPS 모듈 UBX-M8030 [11 1170) TI OPT3101 ToF(Time-of-Flight)
- 기압계 LPS22HB
- 수직 카메라
- 3축 자이로스코프
- 범위: ± 2000 ° / s
- 분해능: 16.4 LSB / ° / s
- 오프셋 / 정확도: ± 0.05 ° / s (열 및 동적 교정 후)
- 3축 가속도계
- 범위: ± 16g
- 분해능: 2.048 LSB/mg
- 오프셋/정확도: ± 0.5 mg(XY) ± 1 mg(Z)(열 및 동적 교정 후)
- 온도 제어 s: 주변 온도와 관련하여 제어된 가열 시스템, 다음 내에서 안정화됨: ± 0.15°C
- 측정 주파수: 2kHz
- 범위: ± 49.152G
- 분해능: 1.5 mG
- 오프셋/정확도: ± 15 mG(보상 후, 최대 모터 속도에서)
- 측정 주파수: 100Hz
- 범위: 260 ~ 1260hPa [1998] 분해능:20 hPa
- 오프셋 / 정확도: ± 0.1 hPa
- 온도 제어: 주변 온도와 관련하여 제어되는 가열 시스템, 다음 내에서 안정화됨: ± 0.2°C
- 측정 주파수: 75 Hz
- 측정 노이즈: 20 cm RMS
- 세라믹 패치 안테나 25 × 25 × 4mm, ANAFI 1
- 보다 2dB 게인 향상 허용 감도: 콜드 스타트 -148dBm / 추적 및 탐색: -167dBm
- 첫 번째 수정 시간: 40초
- ) 정확도 / 정확도: 위치(표준편차 1.4m), 속도(표준편차 0.5m/s)
- 센서 형식: 1214 [1/6인치]
- 해상도: 640 × 480픽셀
- 글로벌 셔터 센서
- 흑백
- FOV: 수평 화각: 53.7 ° / 수직 화각: 41.5°
- 초점 거리: 2.8 mm
- 60Hz에서 지상의 광학 흐름 속도 측정
- 15Hz 및 5Hz에서 정밀 맞춤
- 범위: 0-15m
- 분해능: 0.3mm 정확도
- b: ± 2cm(교정 후)
- 측정 주파수: 64Hz
- ) 3축 자이로스코프
- 범위: ± 2000 ° / s
- 분해능: 16.4 LSB / ° / s
- 오프셋 / 정확도: ± 0.1 ° / s(동적 후 보정)
- 3축 가속도계
- 범위: ± 16g
- 분해능: 2.048 LSB/mg
- 오프셋/정확도: ± 2.0mg(XY) ± 5.0 mg(Z) - 동적 보정 후
- 측정 주파수: 1kHz
- 수직 카메라와 하드웨어 동기화, 정확도: 1μs
- 속도 추정을 위한 광학 흐름
- 위치 추정을 위한 키 포인트 감지 및 매칭
- 넓은 시야의 회전 감지 시스템
- ) 스테레오 정렬 및 이동에 의한 깊이를 기반으로 주변 공간의 깊이 추출
- 채우기 그리드 형태로 환경 표현
- 장애물의 자율 감지 및 회피 최대 속도 29km/h
- ANAFI Ai 인식 시스템에 대한 자세한 설명
- 드론을 둘러싼 3D 환경을 재구성하는 데 사용되는 지각 알고리즘
- 일정 조정 및 장애물 회피
- 메인 카메라는 3-에 장착됩니다. 축 짐벌을 사용하여 드론의 방향과 무관하게 3D 방향으로 만듭니다.
- 감지 시스템은 단일 축 짐벌에 장착되어 있습니다. 드론의 요 운동에 연결되어 모든 방향으로 배향될 수 있습니다.
- 감지 시스템에 사용되는 센서의 세부 사항
- 주 카메라 짐벌과 감지 시스템 짐벌의 사양
- 이중 서스펜션 구조의 잠재력을 활용하기 위해 감지 시스템을 대상으로 하는 전략
- 모델: Onsemi AR0144CSSM28SUD20
- 색상: 흑백
- 해상도: 80080 × 1300]
- 프레임 속도: 30fps
- 글로벌 셔터
- 전체 수평 시야: 118°(감지에 사용 가능한 110°)
- 전체 수직 시야: 72°(62° 감지 사용 가능)
- 초점 거리: 1.47mm(0.039인치 - 492.94610픽셀)
- 조리개: f/2.7
- 공통 피치 축
- 기준선/거리: 62mm(2.44인치)
- 30fps에서 동기 캡처
- 피치 리미터: -116° / 176°
- 롤 리미터: / - 36°
- 요 리미터: / - 48 °
- 한 종점에서 다른 종점까지의 이동 시간: 300ms
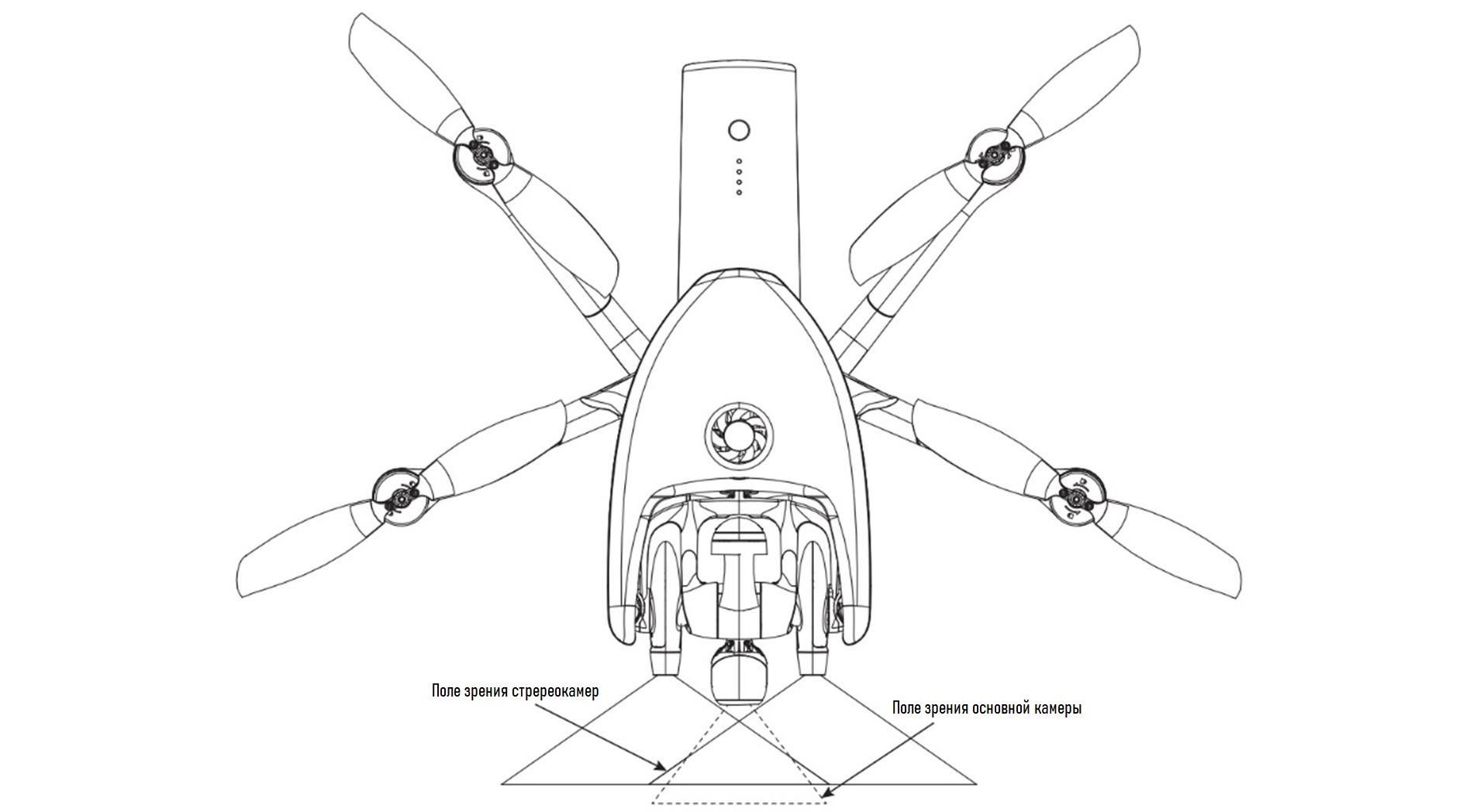
- 프로펠러 블레이드가 메인 카메라의 시야에 들어오지 않습니다
- 메인 카메라가 인식 시스템의 시야를 덮지 않음
- 보관 중 또는 비행 중 비상 사태 시 기본 카메라와 감지 시스템을 완전히 접혀 렌즈를 보호할 수 있습니다
- 두 단계로 수행됩니다.) 깊이 맵의 형태로 인식에서 깊이 정보 추출
- 깊이 맵 데이터를 채우기의 3차원 그리드로 결합
- 스테레오 정렬 기반 깊이
- 모션 깊이
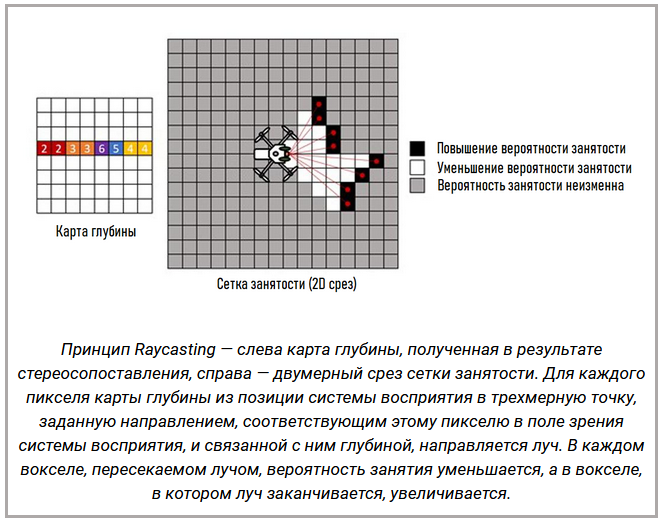
- 인식 시스템의 위치에서 3D 점의 위치까지 채우기 격자에 광선이 그려집니다.
- 3D 점을 포함하는 복셀이 점유될 확률이 증가합니다.
- 3D 점을 포함하는 광선이 아닌 다른 광선이 교차하는 모든 복셀이 점유될 확률이 감소합니다.
- 수평 비행: 29km/h
- 상승: 14km / h
- 하강: 11km / h
- 지상: 엔진이 정지된 경우의 동작(예: 센서 보정).
- 이륙: 다양한 이륙 전략
- 호버: 고정 지점 유지
- 비행: 수동 기능 및 자율 비행
- 착륙: 다양한 착륙 전략
- 임계: 임계 상태 감지 시
각 드론에 대해 고유한 도메인 매개변수 P521이 있는 ECDSA 개인 키를 사용합니다. 보안 요소에서 추출할 수 없습니다. 그리고 이 키와 연결된 인증서는 인증 기관에서 서명합니다.
Wisekey는 펌웨어의 무결성을 보호하고 4G 페어링 및 강력한 인증을 위한 고유한 드론 식별 및 드론으로 촬영한 사진의 고유한 디지털 서명을 제공합니다.

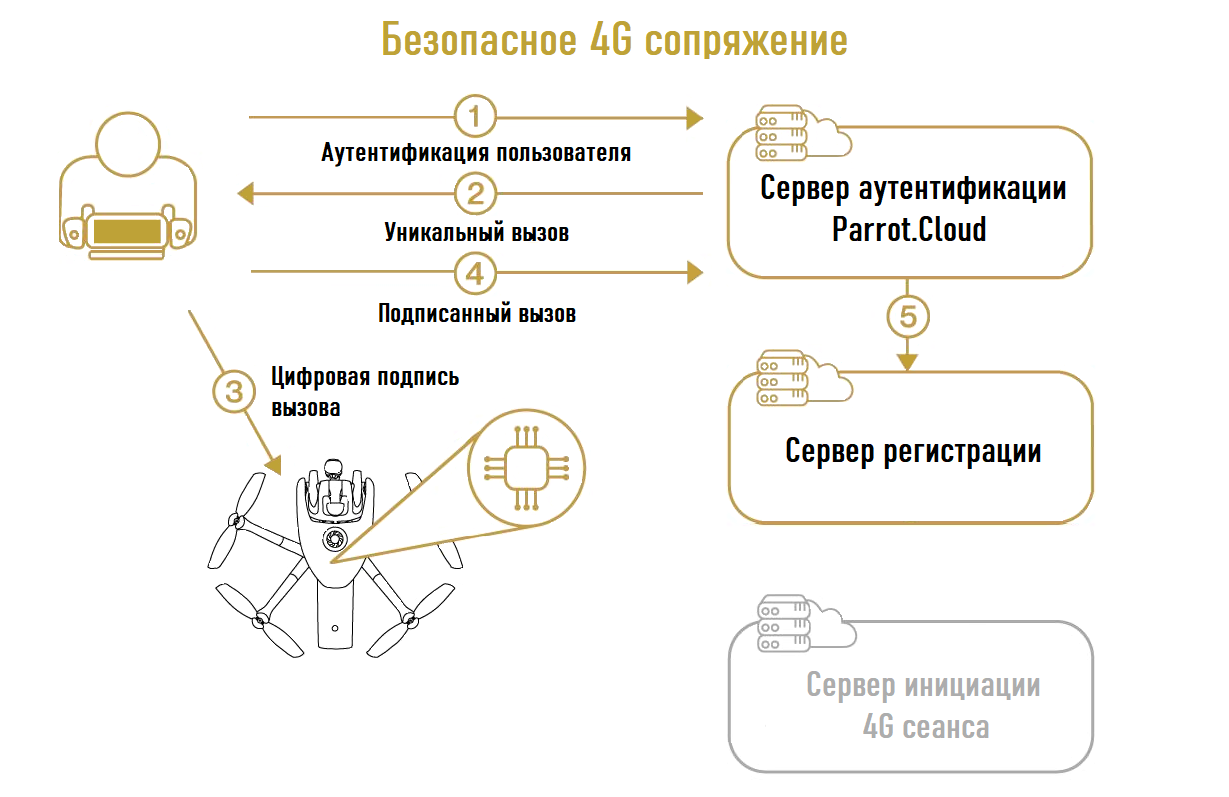
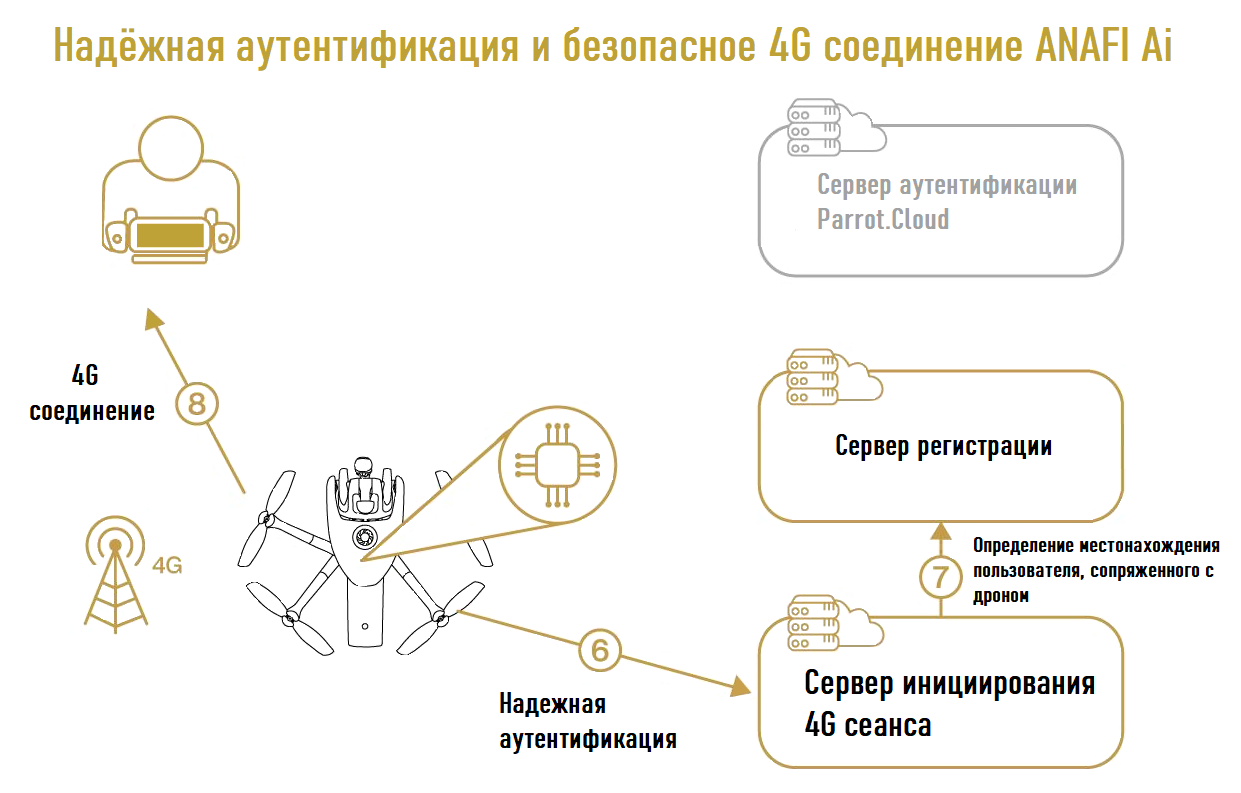
4G 보안 연결 및 강력한 인증
장치를 안전하게 페어링하는 프로세스입니다. 이 과정에서 사용자는 자신이 특정 드론에 연결되어 있음을 확실하게 확인합니다. ANAFI Ai Secure Element 덕분에 그는 드론 내부에 비밀번호를 입력하지 않고도 이 작업을 수행할 수 있습니다.
이후 Parrot 서버는 사용자와 드론 간의 통신을 등록합니다. 사용자와 드론 간의 Wi-Fi 연결이 끊어지면 ANAFI Ai가 자동으로 4G 연결로 전환합니다. ANAFI Ai는 보안 요소에 저장된 개인 키를 사용하여 Parrot 서버에서 강력한 인증을 수행합니다. Parrot 서버는 연결된 사용자를 찾고 ANAFI Ai와 Skycontroller 4 간의 인터페이스를 제공합니다.
Skycontroller 4로 들어오는 드론 제어 및 비디오 스트림을 보호하기 위해 ANAFI Ai는 TLS, DTLS 및 SRTP 프로토콜을 지원합니다.
안전한 초기화 및 업그레이드
항공기 부팅 순서가 보호됩니다. 시스템에서 다음을 확인합니다. Parrot 소프트웨어를 사용하고 이 소프트웨어가 변조되지 않았음을 확인합니다. 초기화할 때마다 보안 검사가 수행됩니다. 업데이트 서비스는 소프트웨어 업데이트의 디지털 서명도 제어합니다. 보안 요소에서 사용자 키 설정
ANAFI Ai 사용자는 특수 운영자 계정 보안 요소에 액세스할 수 있습니다. 이 계정은 이 사용자와 관련된 키를 설정하는 데 사용됩니다. 사용자는 신뢰하는 임무 제공자의 공개 키로 보안 요소를 구성할 수 있습니다. ANAFI Ai는 이러한 키로 서명된 임무만 수행합니다. 이 프로세스는 공격자가 드론에서 악의적인 비행 임무를 수행하는 것을 방지합니다.
디지털 서명된 사진
ANAFI Ai의 Secure Element는 드론 이미지에 디지털 서명할 수 있습니다. 이 서명은 다음을 증명합니다.

즉, 디지털 서명은 촬영된 장소와 시간, 어떤 ANAFI Ai 드론을 포함하여 이미지와 관련된 모든 데이터를 보호합니다.
드론 사진을 사용하는 소프트웨어 솔루션을 제공하는 파트너와 사용자는 드론 인증서 또는 Parrot에서 제공하는 공개 키 카탈로그를 통해 ANAFI Ai 사진의 디지털 서명을 확인할 수 있습니다.
버그 현상금을 통한 투명성 및 지속적인 보안 검사
Parrot은 가능할 때마다 표준 프로토콜과 파일 형식을 사용합니다. 난독화된 코드나 숨겨진 기능이 없습니다. 이를 통해 사용자는 Parrot 제품의 작동 방식을 이해하고 제품의 안전성을 테스트할 수 있습니다. 또한 드론을 제어하는 데 사용되는 소프트웨어인 OpenFlight는 오픈 소스로 사용자에게 완벽한 제어를 제공합니다.
2021년 4월, Parrot은 유럽 최초의 크라우드소싱 보안 플랫폼인 YesWeHack과 함께 버그 바운티 프로그램을 시작했습니다. 이 파트너십을 통해 Parrot은 YesWeHack의 방대한 사이버 보안 연구 커뮤니티를 활용하여 드론, 모바일 앱 및 웹 서비스의 잠재적 취약성을 식별합니다.
버그 바운티 프로그램은 2단계 프로그램입니다.
비공개 프로그램은 처음에 선별된 보안 연구원에게 독점적인 액세스를 제공하고 미래의 Parrot 드론 모델을 포함합니다.연구원의 경험과 다양한 기술은 제품이 시장에 출시되기 전에 높은 수준의 보안을 확인하여 Parrot 사용자의 안전과 데이터 보호를 향상시키는 데 도움이 될 것입니다.
이 비공개 버그 바운티 프로그램의 첫 번째 라운드 이후와 상용화 후에 제품은 공개 프로그램에 들어갑니다. 그런 다음 22,000명 이상의 사이버 보안 연구원으로 구성된 전체 YesWeHack 커뮤니티에서 보안을 엄격하게 검사합니다.

데이터 관리
Parrot Cloud는 사용자가 데이터를 공유하여 멀티미디어는 물론 비행 및 항공기 데이터를 관리할 수 있도록 합니다. 드론이 수신한 데이터.
수집된 데이터
Parrot Cloud는 4가지 유형의 데이터를 수집합니다.
정적(제품 데이터):
이벤트
"컨텍스트 이미지"
원격 측정
수집된 데이터의 최종 사용
Parrot은 품질 향상을 위해 공유에 동의한 고객의 데이터만 수집 및 사용합니다. 자사 제품의...
정비 관리
예방 정비: 우리 도구는 임무와 관련된 모든 정보(임무 유형, 이착륙 시간, 임무 수, 드론 위치, 비행 속도, 비행 계획 및 AirSDK 설정). 이를 통해 ANAFI Ai 드론 함대의 상태(컨트롤러 및 배터리 포함)에 대한 정확한 정보를 실시간으로 받을 수 있습니다.
교정 정비: 수집된 정보는 특정 드론 또는 배터리의 상태를 신속하게 판단하는 데 유용합니다.
인공 지능(AI) 향상
ANAFI Ai(PeleeNet, convolutional network 등)의 AI 요소는 사용자에게 비교할 수 없는 서비스와 기능을 제공합니다. 장애물 회피, 목표 추적, 여러 비행 모드. AI의 품질은 수집된 데이터(이미지 및 비디오)의 양과 품질에 따라 달라집니다. 이 데이터는 머신 러닝을 제공합니다. 이와 관련하여 데이터 품질이 유일한 결정 요소는 아닙니다. 이 데이터와 관련된 메타데이터도 기본적입니다. 이러한 이유로 당사 도구는 이벤트에 따라 분당 총 30~50MB의 이미지와 메타데이터를 정기적으로 수집합니다.
비행 특성
공기 역학 특성
드라이브 및 공기 역학
 ANAFI Ai 프로펠러 블레이드의 CFD 이미지
ANAFI Ai 프로펠러 블레이드의 CFD 이미지 혹등고래와 같은 앞전 고래가 있는 새로운 생체모방 프로펠러 블레이드. 이 접근 방식은 출력에서 동일한 회전 속도에서 추력 증가를 제공하는 발전소의 추진 효율을 증가시키는 것을 가능하게 했습니다. 이 효과는 로터 직경의 증가와 비슷합니다.
어쿠스틱 노이즈, 특히 리딩 에지에서 발생하는 톤 노이즈도 감소됩니다. 따라서 ANAFI Ai는 Skydio 2[1m에서 76.4dB SPL(A)]보다 더 조용합니다[1m에서 71.5dB SPL(A)].
 ANAFI Ai 빔의 CFD 이미지
ANAFI Ai 빔의 CFD 이미지 센서
안전한 비행을 위해 ANAFI Ai에는 다음이 장착되어 있습니다.
센서 특성
비행 IMU: ICM-40609-D
자력계: LIS2MDL
기압계: LPS22HB 1
GNSS: UBX-M8030 1
수직 카메라
ToF: TI OPT3101
수직 카메라 IMU: ICM-42605
Autopilot
ANAFI Ai Flight Controller는 간단하고 직관적인 조종을 제공합니다. 조작하는 데 교육이 필요하지 않습니다.이를 통해 많은 비행 모드(비행 계획, 카메라맨, 손 이륙, 스마트 RTH)를 자동화할 수 있습니다. 센서 융합 알고리즘은 모든 센서의 데이터를 결합하여 ANAFI Ai 비율, 고도, 위치 및 속도를 추정합니다.
상태 평가는 드론의 적절한 기능에 필수적입니다. 쿼드콥터는 비행 컨트롤러가 개방 루프와 함께 사용될 때 본질적으로 불안정합니다. 이를 쉽게 제어하려면 자율 제어는 물론이고 폐쇄 루프 제어 알고리즘을 사용하여 안정화해야 합니다. 이러한 알고리즘은 원하는 궤적을 달성하기 위해 ANAFI Ai에 필요한 명령을 계산하고 모터에 보냅니다.

실내 비행
GPS 신호가 없는 경우 ANAFI Ai는 주로 수직 카메라 측정에 의존하여 속도와 위치를 추정합니다. 수직 카메라 성능은 두 가지 주요 알고리즘에 의해 결정됩니다.
수직 카메라 알고리즘은 수직 카메라 옆에 위치한 한 쌍의 LED 조명이 장착된 ANAFI Ai 덕분에 저조도 조건에서도 작동할 수 있습니다. 이를 통해 드론은 특히 지상에서 5m 미만의 고도에서 실내 비행 또는 GPS가 없는 경우 안정적으로 유지됩니다. LED 조명의 전력은 알고리즘의 필요에 따라 자동으로 조정됩니다.
자율 비행
주요 기능
이 장에서는 자율 비행을 가능하게 하기 위해 ANAFI Ai에서 사용하는 센서, 하드웨어 및 알고리즘에 대해 자세히 설명합니다.

지각 시스템 전략
3차원 환경의 지각은 자율 비행을 달성하는 핵심 능력, 특히 제한된 공간에서. 장애물 탐지 및 회피를 보장하기 위한 전제 조건으로 드론 운영자의 부담을 줄이고 임무 성공률을 높이며 항공기의 안전을 보장합니다.
제한 없이 모든 방향으로 자유롭게 이동하고 회전할 수 있는 비행 카메라의 잠재력을 최대한 발휘하려면 효과적인 감지 솔루션이 필요합니다.특히, 감지 시스템은 카메라 방향에 관계없이 비행 중 전진 동작에 해당하는 방향으로 환경에 대한 정보를 수신할 수 있어야 합니다.
ANAFI Ai는 두 개의 기계식 짐벌을 기반으로 하는 고유한 기술 솔루션에 의존하여 메인 카메라의 방향과 감지 시스템을 분리합니다.
 지각 및 시각화를 위한 ANAFI Ai 이중 안정기. 1281
지각 및 시각화를 위한 ANAFI Ai 이중 안정기. 1281 두 행거의 기울기 축은 동일선상에 있으며 초소형 디자인을 달성하기 위해 결합됩니다. 이 솔루션 덕분에 메인 카메라와 감지 시스템을 서로 다른 두 방향으로 향하게 할 수 있습니다. 이 디자인은 드론의 측면, 상단, 하단 및 후면에 값비싼 카메라를 사용하는 것을 피하면서 감지 시스템에 사용할 수 있는 넓은 시야를 제공합니다.
이 섹션은 다음과 같이 구성됩니다.
센서
감지 시스템은 쌍을 기반으로 합니다. 하나의 피치 축을 가진 동일한 카메라의...
 ANAFI Ai 감지 시스템용 1축 기계적 힌지.
ANAFI Ai 감지 시스템용 1축 기계적 힌지. 센서 사양은 다음과 같습니다.
사양 스테레오 쌍은 다음과 같습니다.

듀얼 짐벌
메인 카메라의 기계식 짐벌은 3축 기계식 피치롤 l-yaw "다음 특성:
감지 시스템의 기계적 서스펜션은 다음과 같은 특성을 가진 단일 축 서스펜션입니다. 1323]
감지 시스템에는 311°의 이동이 있으며(이 중 296°는 무인 항공기 본체에 의해 가려지지 않음) 후진이 가능합니다. 지각.
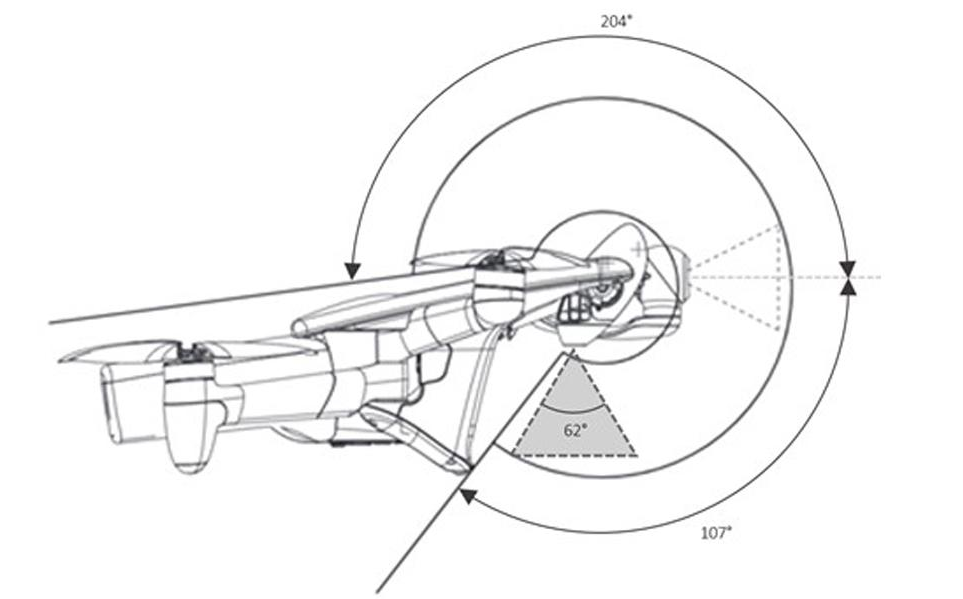
즉각적인 수직 시야 및 인식 시스템 제한 ANAFI Ai.
시스템은 다음과 같은 방식으로 설계되었습니다.
 ANAFI Ai 인식 시스템의 수평 시야.
ANAFI Ai 인식 시스템의 수평 시야. 몸을 뒤로 젖힐 때 지각 시스템이 가장 높은 위치로 이동하여 선명한 시야를 제공합니다.
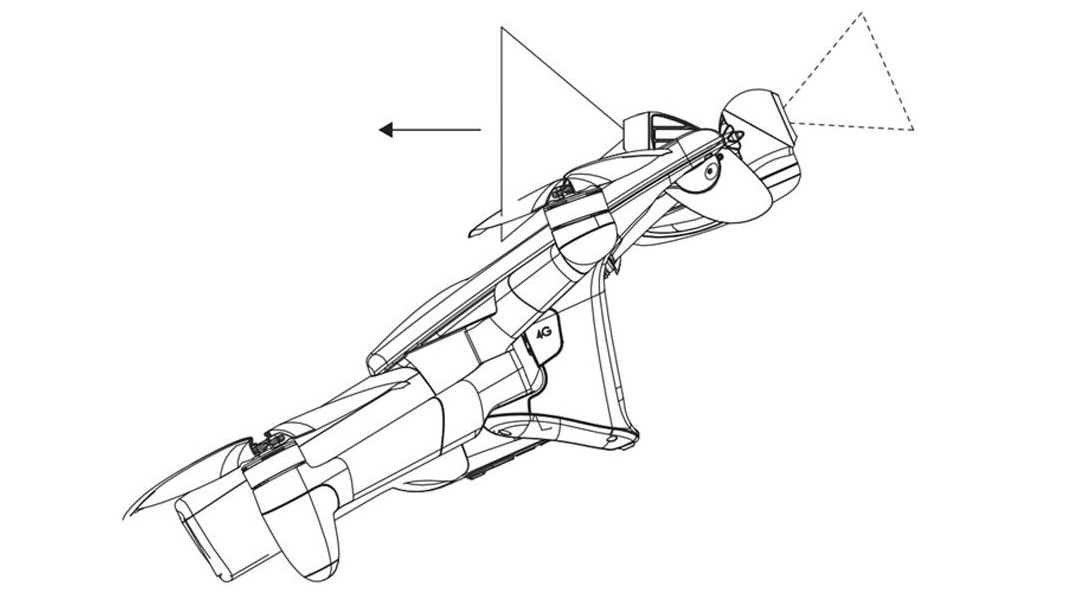
후진 비행을 위해 완전히 기대어 있는 위치에서 ANAFI Ai의 인식.
환경의 재구성
자율 비행을 위한 주변 3차원 환경의 재구성은
인식 센서에서 깊이 맵을 얻는 데 두 가지 방법이 사용됩니다.:
스테레오 대응 깊이
깊이 추출의 주요 방법 정보는 인식 시스템의 두 스테레오 카메라 사이의 시차를 기반으로 합니다. 한 방향으로 환경을 촬영하지만 두 개의 다른 위치에서 인식 시스템의 시야에 있는 물체는 두 대의 카메라로 얻은 이미지에서 다른 위치에 나타납니다. 피사체가 가까울수록 위치의 차이가 커집니다.
따라서, 전략은 감지 시스템의 시야에서 동일한 물체에 대응하는 좌우 스테레오 카메라에 의해 획득된 이미지의 점을 결정하고 이들의 위치 차이를 측정하는 것입니다. 두 이미지의 포인트. 이 차이를 디스패리티라고 하며 픽셀 수로 측정됩니다.
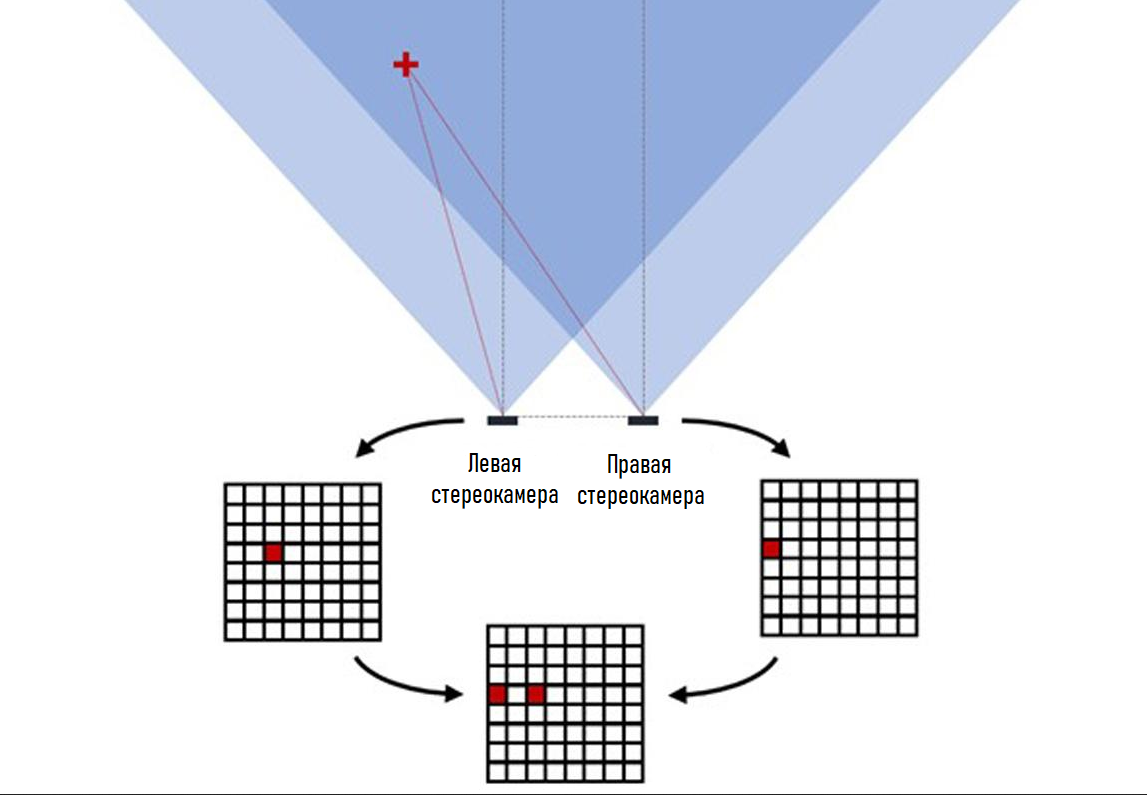 스테레오 비전의 원리 그림 - 빨간색 3D 포인트는 왼쪽 및 오른쪽 이미지에서 다른 위치에 있습니다.
스테레오 비전의 원리 그림 - 빨간색 3D 포인트는 왼쪽 및 오른쪽 이미지에서 다른 위치에 있습니다. 시차는 다음 관계를 사용하여 이러한 점 각각의 깊이와 관련될 수 있습니다. 깊이 = 초점 * 기준선 / 불일치, 여기서 깊이와 기준선은 동일한 단위로 표현되고 초점 길이와 차이는 픽셀 수로 표현됩니다.
계산 결과는 176 × 90 픽셀의 깊이 맵 형태를 취하며, 각 픽셀의 값은 미터 단위의 깊이에 해당한다. 깊이 맵은 30Hz에서 새로 고쳐집니다.
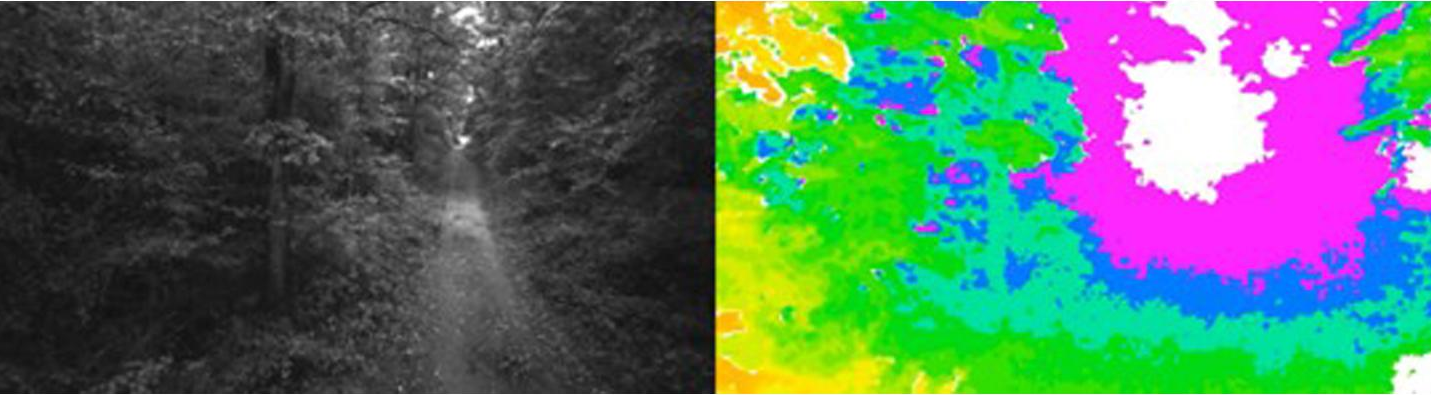
ANAFI Ai 감지 시스템의 오른쪽 카메라로 캡처한 이미지의 예(왼쪽)와 스테레오 이미징을 사용하여 얻은 해당 깊이(오른쪽). 색상 맵은 빨간색(가까움)에서 보라색(멀리)으로 이동합니다. 흰색은 도달 범위를 벗어남을 의미합니다. 디스패리티는 불연속 값(픽셀 수)만 취할 수 있기 때문에 이 방법으로 측정한 깊이가 이산화된 결과가 바로 나타납니다. 인식 시스템에서 충분히 멀리 떨어져 있고 1픽셀 미만의 이론적 시차를 생성하는 3D 포인트는 해당 실제 이산 시차가 0과 같기 때문에 무한한 것으로 간주됩니다. 스테레오 비교 방법의 정확도는 거리가 증가함에 따라 감소하지만, 서브픽셀 샘플링을 구현하여 이러한 현상을 줄일 수 있는 방법입니다.
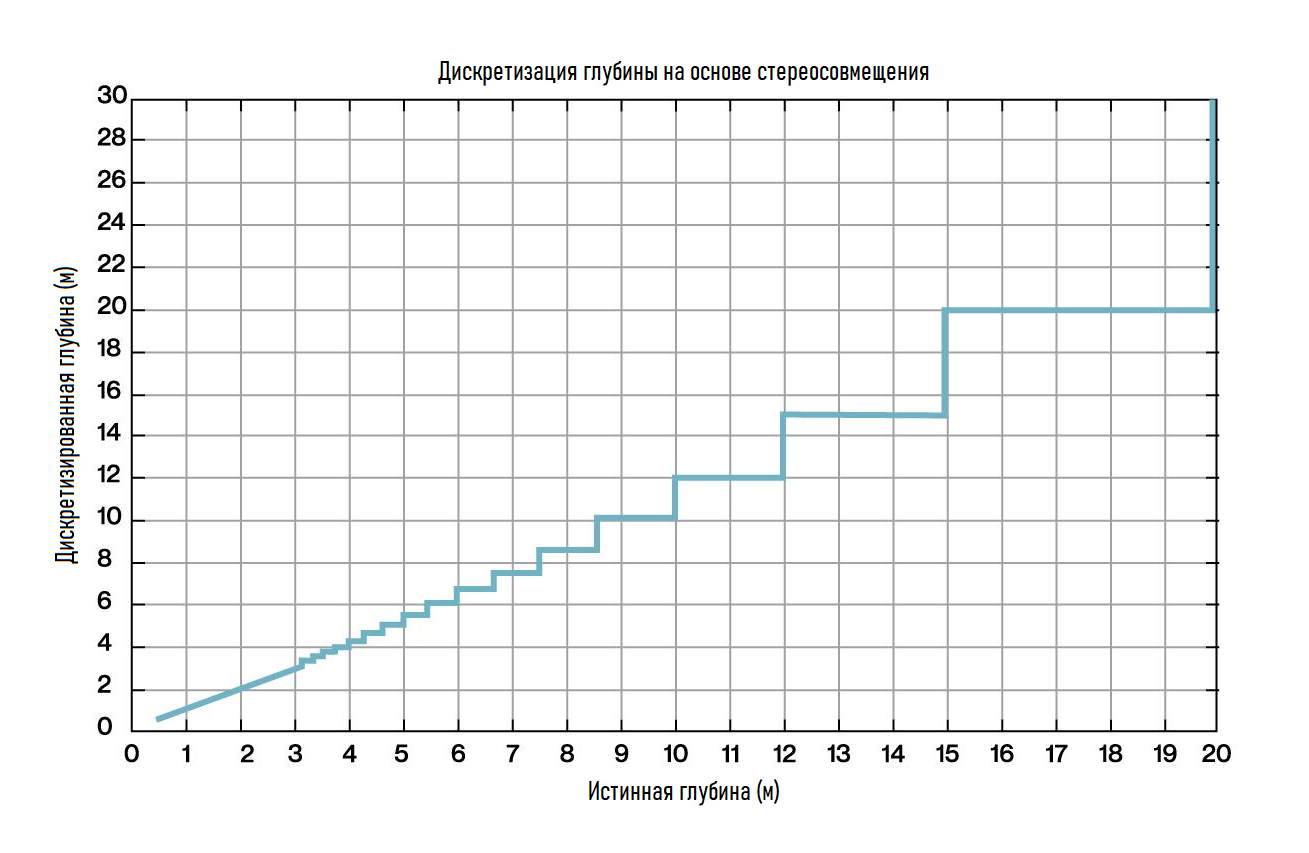 "스테레오 정렬" 대 "진정한 깊이"에 의해 측정된 이산화된 깊이.
"스테레오 정렬" 대 "진정한 깊이"에 의해 측정된 이산화된 깊이. 또한 깊이가 0에 가까워짐에 따라 디스패리티가 발산합니다.이미지의 픽셀 수가 제한되어 있기 때문에 디스패리티 값도 제한됩니다. 결과적으로 지각 시스템이 블라인드되는 최소 깊이가 있습니다. 이 최소 깊이는 ANAFI Ai의 경우 36cm입니다.
보정 정보: 각 스테레오 카메라 쌍은 두 카메라 사이에 존재할 수 있는 작은 불일치를 정확하게 측정하고 온보드 깊이 계산에서 보정하도록 공장에서 보정됩니다.
사용자는 또한 드론과 함께 제공된 테스트 패턴을 사용하여 한 쌍의 스테레오 카메라를 재보정할 수 있습니다. 특히 드론은 수명 동안 발생할 수 있는 잠재적인 보정 오류를 어느 정도 감지할 수 있습니다. 이 경우 기체 소프트웨어는 조정 및 보상을 시도하며, 실패하면 재보정을 요청하는 알림이 표시됩니다.
이동의 깊이
드론의 이동은 다양한 각도에서 환경 이미지를 수집하여 깊이 정보를 재구성하는 데에도 사용할 수 있습니다. 이 기술은 하나의 움직이는 카메라로 깊이 정보를 수집하기에 충분하기 때문에 움직임으로부터의 깊이 또는 단안 감지라고 합니다.
작동 원리는 스테레오 비전과 유사하지만 동시에 다른 관찰자가 얻은 환경 이미지를 비교하는 대신 인식은 동일한 관찰자가 다른 시간에 얻은 환경 이미지를 비교합니다. 드론이 움직이면 이 독특한 관찰자의 이미지가 다른 각도에서 캡처됩니다. 각 프레임이 촬영된 위치를 알면 다른 이미지에서 동일한 기능에 해당하는 점을 삼각 측량하여 3D로 되돌릴 수 있습니다.
출력은 10Hz의 주파수에서 생성된 ANAFI Ai에 대해 최대 500개의 포인트를 포함하는 3차원 포인트 클라우드입니다.
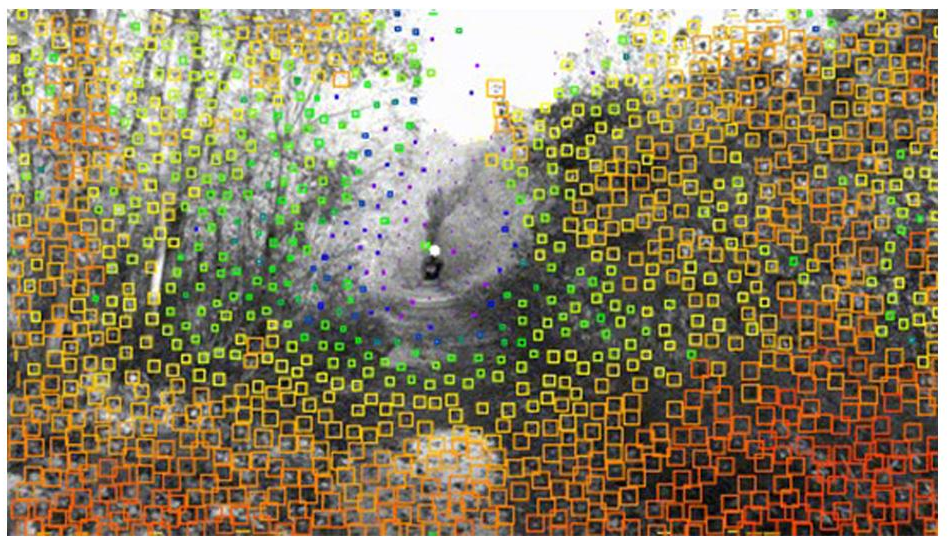 모션의 깊이를 기반으로 생성된 포인트 클라우드의 예 - 컬러 맵은 빨간색(가까움)에서 보라색(멀리)으로 이동합니다. ANAFI Ai Motion Depth 알고리즘은 일반적으로 스테레오 매칭 알고리즘보다 적은 정보(희소 포인트 클라우드)를 생성하고 드론이 정보를 수집하기 위해 움직여야 합니다. 또한 이 알고리즘은 이미지의 물체가 이 방향(확장 초점)에서 거의 정지해 있기 때문에 정확한 이동 방향(적어도 라이브 방송의 경우)으로 정보를 추출할 수 없습니다.
모션의 깊이를 기반으로 생성된 포인트 클라우드의 예 - 컬러 맵은 빨간색(가까움)에서 보라색(멀리)으로 이동합니다. ANAFI Ai Motion Depth 알고리즘은 일반적으로 스테레오 매칭 알고리즘보다 적은 정보(희소 포인트 클라우드)를 생성하고 드론이 정보를 수집하기 위해 움직여야 합니다. 또한 이 알고리즘은 이미지의 물체가 이 방향(확장 초점)에서 거의 정지해 있기 때문에 정확한 이동 방향(적어도 라이브 방송의 경우)으로 정보를 추출할 수 없습니다.그러나 스테레오 매칭보다 더 나은 감지 범위(이론적으로 무한한 범위)를 갖는다.
채우기 격자
스테레오 및 단안 감지 알고리즘의 깊이 정보가 채우기 격자에 통합됩니다. 이 메쉬는 3D 환경을 복셀이라고 하는 3D 큐브로 샘플링합니다. 각 복셀에는 장애물이 있거나 반대로 장애물이 없을 확률이 할당됩니다.
광선 전송 알고리즘은 깊이 정보를 채우기 그리드에 통합하는 데 사용됩니다. 스테레오 비교 결과 얻은 깊이 맵의 각 픽셀에 대해 3차원 포인트로 변환하고 포인트 클라우드의 각 포인트에 대해 모션의 결과로 얻은 깊이로 변환합니다.
따라서 그리드는 깊이 정보에 대한 시간 필터 역할을 하여 깊이 측정에서 잠재적인 노이즈를 흡수하고 이전 측정의 메모리로 작동하여 다음을 허용합니다. 지각 시스템의 지속적인 360 ° 시야가 없는 경우에도 어려운 환경을 탐색할 수 있습니다.
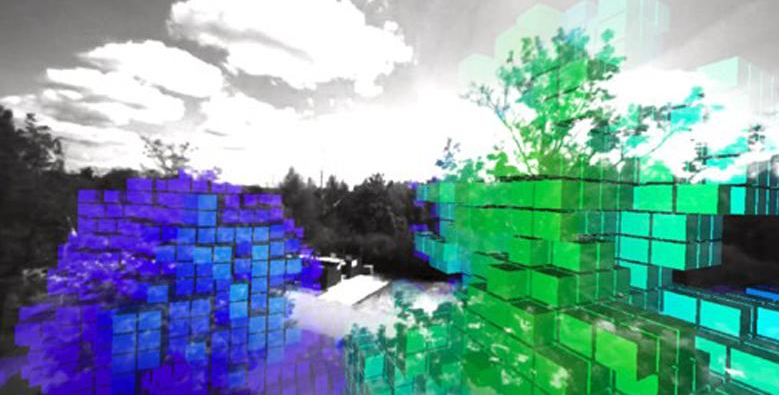 채우기 격자의 예. 복셀은 빨간색(Near)에서 보라색(Far)에 이르기까지 사용 중임을 높은 수준의 확실성과 함께 오른쪽 스테레오 카메라 보기에 중첩됩니다.
채우기 격자의 예. 복셀은 빨간색(Near)에서 보라색(Far)에 이르기까지 사용 중임을 높은 수준의 확실성과 함께 오른쪽 스테레오 카메라 보기에 중첩됩니다. 채우기 그리드는 자율 비행 및 장애물 회피를 위해 ANAFI Ai에서 사용하는 모션 계획 알고리즘의 기초입니다.
장애물 회피
ANAFI Ai는 인필 그리드에 저장된 드론의 3D 환경에 대한 지식 덕분에 장애물을 피할 수 있습니다. 이것은 자율 임무에 상당한 추가 안전을 제공하지만 특히 조종사와 드론 사이의 시야가 손상된 경우 수동 비행에도 유용합니다.
매 30ms ANAFI Ai는 미래에 명목상의 짧은 시간 지평선이 무엇인지 예측합니다. 이 예측은 리모컨의 비행 명령이든, 비행 계획에 첨부할 웨이포인트든, 입력 궤적이든 사용자가 제출한 링크에서 추론됩니다. 그런 다음 시뮬레이션된 내부 드론 모델을 사용하여 일정 조정 알고리즘은 이 예측된 공칭 궤적에 대해 가능한 가장 작은 수정을 계산하여 드론에 충돌이 없고 실현 가능하도록 합니다.
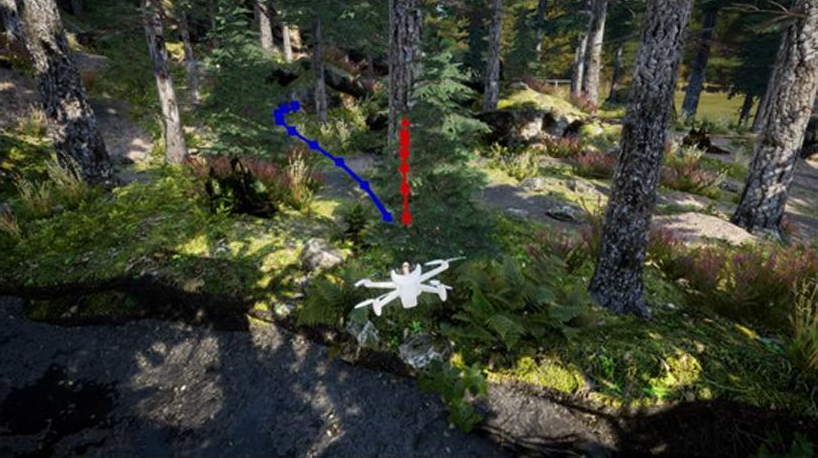 기준 궤적과 나무의 충돌에 대한 응답으로 장애물 회피 알고리즘에 의해 계산된 조정 궤적의 예.
기준 궤적과 나무의 충돌에 대한 응답으로 장애물 회피 알고리즘에 의해 계산된 조정 궤적의 예. ANAFI Ai 장애물 회피 시스템은 다음과 같은 속도로 작동하도록 설계되었습니다.
비 또는 강풍, 저조도 또는 방해 위성 항법에서 회피 성능이 제한됩니다. 또한 비행하기 전에 감지 시스템의 렌즈가 깨끗한지 확인해야 합니다.
비행 임무

주요 기능
항공 SDK(참조. SDK 섹션)을 통해 개발자는 모든 드론 센서, 카메라, 연결 인터페이스 및 독립 실행형 기능에 액세스할 수 있습니다. 따라서 드론의 동작을 사용자 정의하여 비행 임무를 생성할 수 있습니다. 각 비행 임무에는 기본 동작 또는 모드 세트가 포함되어 있습니다.
맞춤형 비행 임무는 새로운 행동을 생성하거나 기본 임무에서 재사용할 수 있습니다.
가격 및 가용성
ANAFI Ai 드론의 판매 시작은 2021년 9월로 예정되어 있습니다. 현재 가격 정보는 공개되지 않았습니다. 우리는 들어오는 정보를 계속 모니터링하고 나중에 이 섹션을 확실히 업데이트할 것입니다.

다운로드용 문서
개발자로부터 제품을 알아가기 위한 문서:
비디오
개발자 및 사용자의 최고 리뷰 ANAFI Ai
포장을 풀고 첫 비행.
4G 연결로 범위에서 드론의 시험 비행. 총 비행 시간은 평균 수평 비행 속도 58km/h(16m/s)에서 29분이었습니다. 이 기간 동안 드론은 27km를 비행할 수 있었습니다. 또한 드론 시스템에서 지속적으로 경고하는 강한 바람 조건에서 비행이 수행되었음을 알 수 있습니다.
.







