
- 1 Inleiding
- 2 De ontwikkelaar over de machine
- 3 Functies
- 4 Pakket inhoud
- 5 Specificatie
- 5.1 Drone
- 5.2 Communicatie
- 5.3 Navigatiesysteem
- 5.4 Skycontroller 4
- 5.5 Aircraft Intelligent Battery
- 5.6 App
- 5.7 Camera
- 5.8 Autonome vliegmodi
- 5.9 Cyberbeveiliging
- 5.10 Parrot SDK
- 6 Uiterlijk
- 7 Communicatie
- 7,1 4G
- 7,2 Max. bereik met 4G-verbinding
- 7.3 Wi-Fi
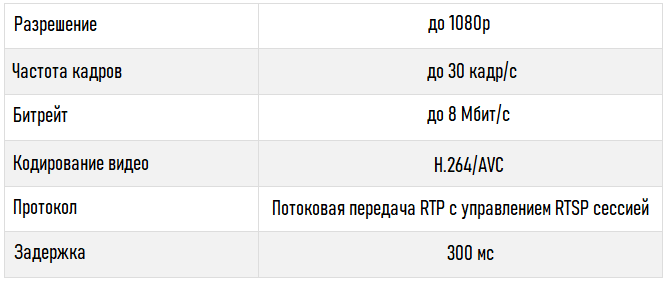
- 7.4 Live video
- 8 Camera
- 8.1 48MP-matrix
- 8.2 Lens
- 8.3 Videostanden
- 8.4 Videocodering
- 8.5 HDR
- 8.6 Fotomodi
- 9 Hybride stabilisatie
- 9.1 Gimbal hoofdcamera
- 10 Fotogrammetrie
- 10.1 Inspectie en cartografie
- 10.2 AI- en 4G-mogelijkheden
- 10.3 Autonome vlucht
- 11 Fotogrammetrie of lidar
- 11.1 Fotogrammetrie voordelen
- 11.2 LIDAR nadelen
- 12 SDK
- 12.1 Air SDK
- 12.2 Ground SDK
- 12.3 OpenFlight
- 12.4 Sphinx
- 12,5 Olympe
- 12.6 PdrAW
- 12.7 Modellen C. A. D.
- 12.8 MAVLink- en GUTMA-compatibiliteit
- 13 Grootste partnerecosysteem voor Parrot-drones
- 13.1 Parrot voor alle zakelijke behoeften
- 14 Cyberbeveiliging
- 14,1 Gegevensprivacy
- 14,2 FIPS140-conform -2 en gecertificeerd door CC EAL5 Secure Element
- 14.3 4G beveiligde verbinding en sterke authenticatie
- 14.4 Veilige initialisatie en upgrade
- 14.5 Gebruikerssleutels instellen op het beveiligde element
- 14.6 Digitaal ondertekende foto's
- 14.7 Transparantie en continue beveiligingscontrole met bug bounty
- 15 Gegevensbeheer
- 15.1 Verzamelde gegevens
- 15.2 Eindgebruik van verzamelde gegevens [1 26]
- 15.3 Verbetering van kunstmatige intelligentie (AI)
- 16 Vluchtkenmerken
- 16.1 Aerodynamische kenmerken
- 16.2 Actuatoren en aerodynamica
- 16.3 Sensoren
- 16.4 Sensorkarakteristieken
- 16.5 Automatische piloot
- 17 Autonome vlucht
- 17.1 Belangrijkste kenmerken
- 17.2 Perceptiesysteemstrategie
- 17.3 Sensoren
- 17.4 Dubbele ophanging
- 17.5 Reconstructie van de omgeving
- 18 Vluchtmissies
- 18.1 Belangrijkste kenmerken
- 19 Prijs en beschikbaarheid
- 20 Documentatie downloaden
- 21 Video's
Inleiding [16 4]
Parrot Anafi Ai is een volledig nieuwe unieke oplossing van een bekende Franse ontwikkelaarcommercieel gebruik
Het visitekaartje van Anafi Ai is de ingebouwde 4G-module, waardoor de drone de vierde generatie mobiele communicatie kon gebruiken als het belangrijkste datatransmissiekanaal tussen de drone en de controleapparatuur, die in feite verwijdert alle beperkingen op het vliegbereik en bepaalt vooraf de werking van de UAV buiten het gezichtsveld. Vooruitkijkend merken we dat het verklaarde potentieel van de machine ongelooflijk krachtig bleek te zijn en meer dan ooit overeenkomt met zijn futuristische uiterlijk, dat door de natuur werd geïnspireerd om Franse ingenieurs te creëren.
De ontwikkelaar over de auto
Martin Liné, marketingdirecteur bij Parrotboden Parrot-drones

Kenmerken
Belangrijkste kenmerken van Parrot Anafi Ai:
- Gewicht 898 gram
- Tijd om te vliegen 60 seconden
- Uniek draagbaar opvouwbaar ontwerp
- Ingebouwde 4G-communicatiemodule voor volledige interactie tussen drones en controleapparatuur zonder beperkingen in alle omgevingsomstandigheden
- Wereldwijd compatibel met LTE
- Uitgerust met omnidirectioneel signaaltransmissiesysteem (4 directionele antennes met reflector (met versterking: 2,5 dBi / s-antennes) De drone bepaalt het beste paar antennes afhankelijk van zijn oriëntatie en positie ten opzichte van de positie van de piloot)
- Uitgerust met een uniek omnidirectioneel beeldvormingssysteem van de omringende wereld, gebouwd op een paar stereoscopische camera's gemonteerd op een speciale cardanische ophanging met een panbereik van 330 graden (van -120 ° tot 210 °), samenwerken met een intelligent optimalisatiesysteem. vliegroutes
- Aangepast voor binnenvluchten
- Live videostreaming in 1080p met lage latentie (300 m/s) zonder bereikbeperkingen waar ook ter wereld, met videobitsnelheid 12 Mbps
- Mogelijkheid om bestanden direct tijdens de vlucht naar cloudopslag over te brengen
- Ingebouwde Wi-Fi-communicatiemodule (Wi-Fi 802.11a / b / g / n) voor volwaardige bediening van drone / apparatuur (zoals een alternatieve aansluitmogelijkheid)
- Slave. Wi-Fi-frequentiebereik: 2,4 GHz / 5,8 GHz
- Max. bereik van FPV-vlucht via Wi-Fi: 9 km
- Unieke automatische werkingsmodus van 4G / Wi-Fi-modules, waarmee op basis van netwerkcongestie naadloos kan worden overgeschakeld van de ene communicatietechnologie naar de andere zonder gegevensverlies
- Beschermingsklasse drone IPX3
- Max. vliegtijd 32 min
- Max. horizontale vliegsnelheid 61 km/u
- Max. windweerstand: 13 m/s
- Max.plafond boven zeeniveau 5000 m
- 48MP 4K-camera gebouwd op 1/2-inch CMOS-matrix met een pixelgrootte van 0,8 m; met ingebouwde Bayer-kleurfilterarray
- Optische LD-ASPH-lens
- Hybride 6-assige beeldstabilisatiesysteem (3-assige mechanische 3-assige digitale EIS)
- Regelbaar werkbereik gimbal -90 ° tot 90 °
- 6x lossless digitale zoom (2x in 4K-modus / 4x in FHD-modus)
- Max. videobitsnelheid 200 Mbps
- Video-opname-indelingen HDR8 / HDR10
- Max. dynamisch bereik 14EV
- P-log-kleurprofiel voor nabewerking
- 5 × automatische vlucht- en opnamemodi (Photogrammetry / Flight Plan / Cameraman / Smart RTH / Vehicle)
- Ingebouwde sleuven voor MicroSD- en SIM-kaarten
- Compatibel met PIX4D Suite
- Fotogrammetrische vliegmodi zijn beschikbaar in mob. FreeFlight 7-app en OpenFlight-software
- Een vliegplan maken met één klik
- 48MP 1 fps fotogrammetrie: twee keer zo snel als concurrenten
- Opnamenauwkeurigheid: 0,46 cm / pix. GSD op 30 m
- Parrot SDK-ondersteuning (met de mogelijkheid om uw code in de drone in te bedden met behulp van de Air SDK, mobiele applicaties te maken met behulp van de Ground SDK, een open source grondstation te configureren met OpenFlight, interactie met de moderne Sphinx drone-simulatietool en Python-scripting met Olympe en video- en metadataverwerking met PdrAW)
- Compatibel met software van derden: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- ANAFI Ai voldoet aan Algemeen Regelgeving Gegevensbeschermingsverordening van de Europese Unie (AVG)
- Superieure gegevensprivacy met ingebouwde NIST FIPS140-2 Level 3 WISeKey Secure Element met Common Criteria EAL5-certificering
- Video en bedieningselementen beschermd met SRTP / DTLS volgens webRTC
- Nieuwe draagbare regelapparatuur van Parrot Skyco ntroller 4
- Nieuwe mobiele applicatie Parrot FreeFlight 7

Pakket
De ontwikkelaar biedt de drone in een enkele configuratie, waaronder:
- Drone ANAFI Ai
- Stijve transportkoffer
- Besturingsapparatuur Parrot Skycontroller 4
- 1 × Smart batterij
- USB-PD-oplader
- Reserveschroefset (2CW / 2CCW)
- Begeleidende kabel (USB-C naar Lightning)
- 2 × begeleidende kabels (USB -C naar USB-C)
- Kalibratiekaart

Specificatie
Vliegtuig

Communicatie
Navigatiesysteem
Skycontroller 4

Intelligente vliegtuigbatterij
App

Camera

Autonome vliegmodi
Cyberbeveiliging
Parrot SDK
Vervolgens gaat u kunt u vertrouwd maken met de belangrijkste informatie van de Parrot Anafi Ai, waardoor u meer te weten komt over het verklaarde potentieel van de machine en welke verbeteringen zijn doorgevoerd in vergelijking met de commerciële versie van de drone Parrot Anfi Thermal en andere drones van toonaangevende merken.
Uiterlijk





Communicatie
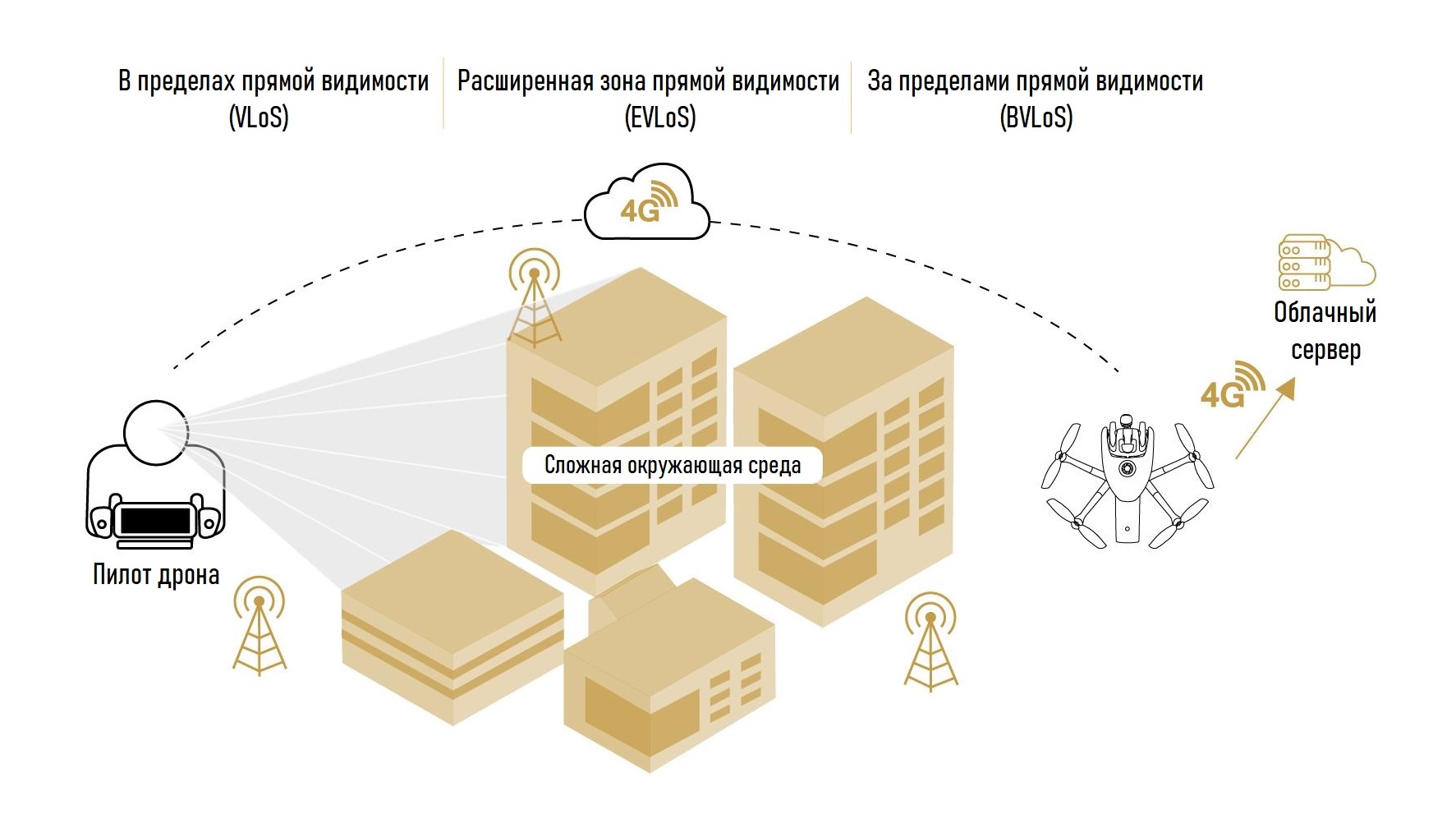
4G
ANAFI Ai bevat 4G-radiomodule (naast de wifi-radiomodule), waarmee u een videostream in 1080p-kwaliteit met een maximale bitrate van 12 Mbps, met een zeer lage latentie (300 ms), zonder beperking in bereik en waar ook ter wereld kunt uitzenden.
Compatibiliteit
De ANAFI Ai 4G-module ondersteunt meer dan 28 frequentiebanden, goed voor meer dan 98% van de frequenties die wereldwijd worden ingezet.
Automatische netwerkswitch
De kwaliteit en bandbreedte van 4G- en wifi-netwerken worden elke 100 ms gemeten om de streaming aan te passen aan de netwerkomstandigheden. In combinatie met routeringsalgoritmen blijft de verbinding tussen de drone en zijn controller behouden, zelfs wanneer wifi ernstig wordt verstoord. Dus wanneer de effectieve bandbreedte (bruikbare bandbreedte) van Wi-Fi lager is dan 1,5 Mbps, schakelt het systeem automatisch over naar 4G.
Om het verbruik van mobiele data te beperken wanneer de piloot zich binnen het bereik van het wifi-netwerk van de drone bevindt, wordt de overgang van 4G naar wifi ook automatisch uitgevoerd zonder de videostream af te sluiten.
Max. bereik met 4G-verbinding
De video van de ontwikkelaar toont de max. vliegbereik van Anafi Ai met 4G-verbinding in één richting op één batterijlading. De totale vliegtijd bedroeg 29 minuten bij een gemiddelde horizontale vliegsnelheid van 58 km/u (16 m/s). Gedurende deze tijd kon de drone 27 km afleggen. Je kunt ook merken dat de vlucht werd uitgevoerd in harde wind, die constant werd gewaarschuwd door het drone-systeem.
Geïmplementeerde algoritmen voor videostreamoptimalisatie
4G-congestiecontrole
Congestiecontrole-algoritme maakt het volgende mogelijk:
- Meet pakketverlies over de gehele netwerkcyclus.
- Maatregel vertraging (retourtijd).
- Pas de bandbreedte aan volgens deze twee parameters.
Het uiteindelijke doel van het algoritme is om de beschikbare bandbreedte te maximaliseren met behoud van de laagst mogelijke latentie. Dit algoritme is geïmplementeerd op elk van de beschikbare interfaces in de drone, elk met zijn eigen parameters, geoptimaliseerd volgens het netwerk. Op basis van de informatie die door dit algoritme wordt geleverd, neemt de linkmanager beslissingen over routering en actieve interface.
De drone besturen via een 4G-verbinding
ANAFI Ai maakt in minder dan 30 seconden verbinding met de afstandsbediening via 4G als de drone buiten het bereik van wifi is, en in minder dan 15 seconden als de drone zich binnen het wifi-bereik bevindt. En ook 4G-verbinding biedt:
- Detectie en initiatie van een verbinding op basis van het VOIP SIP-protocol.
- Gebruik een relayserver om verbindingen tot stand te brengen via beveiligde netwerken.
Prestaties videostream
- Latentie: 300 ms.
- Beveiliging: video en bedieningselementen zijn beveiligd met SRTP / DTLS volgens webRTC.
- Antennes: 28 LTE-banden van 700 MHz tot 2,6 GHz.

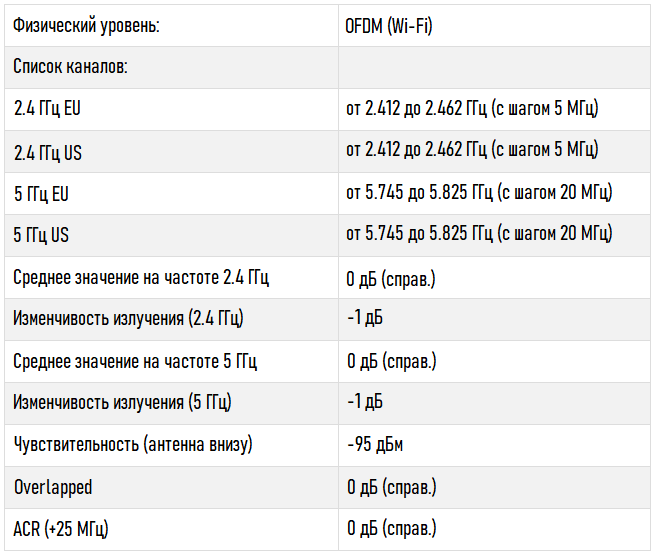
Wi-Fi
Omnidirectioneel transmissiesysteem
- ANAFI Ai heeft 4 directionele reflectorantennes (met antenneversterking: 2,5 dBi/s). De drone bepaalt het beste paar antennes op basis van zijn oriëntatie en positie ten opzichte van de positie van de piloot.
- Met een gecombineerde versterking van 3,5 / - 1,5 dBi in het horizontale vlak van de drone, is de ANAFI Ai RF-versterking zeer uniform.
- De straling van de stroomafwaartse antenne is met 4 dB verbeterd ten opzichte van ANAFI.
Extern ontwerp van de krachtige radio
De voorkant van de radio maximaliseert het vermogen aan de basis van de antenne met een zeer goede lineariteit en gevoeligheid (-94 dBm bij 6,5 Mbps) om het maximale FCC-beperkende vermogen te bereiken.

Wi-Fi-betrouwbaarheid
802.11-parameters
lage bandbreedte, lage latentie, variabiliteit van het ontvangstniveau vanwege de snelheid van de drone, lange afstand, aanwezigheid van interferentie. Deze parameters omvatten aggregatie, aantal nieuwe pogingen, MiMo-technologie (STBC), controleframegegevenssnelheid en ontkoppelingsvoorwaarden.
Intelligente interferentiepreventie
ANAFI Ai heeft een algoritme voor het verwijderen van kanalen (2,4 GHz en 5 GHz dual-band) in geval van interferentie.
Aanpassing en stromingsbewaking
ANAFI Ai bewaakt continu de status van zijn 4 Hz-verbinding en kan interferentie detecteren. Hierdoor kunt u de bandbreedte en de grootte van de verzonden pakketten dynamisch optimaliseren. Het waarschuwt de piloot ook als hij zich in een bijzonder storende omgeving bevindt of op het punt staat het signaal te verliezen.
Bandbreedtevermindering
Bij de limiet van zijn bereik en als de omstandigheden het toelaten, kan ANAFI Ai overschakelen naar een bandbreedte van 10 MHz om de gevoeligheid met 3 dB te verbeteren en het bereik met 40% te vergroten.

Radio-indicatoren
Video-uitzending
Videolink-indicatoren
Geïmplementeerde algoritmen voor het optimaliseren van videostreams
Parrot Gen4 Streaming (4e generatie)
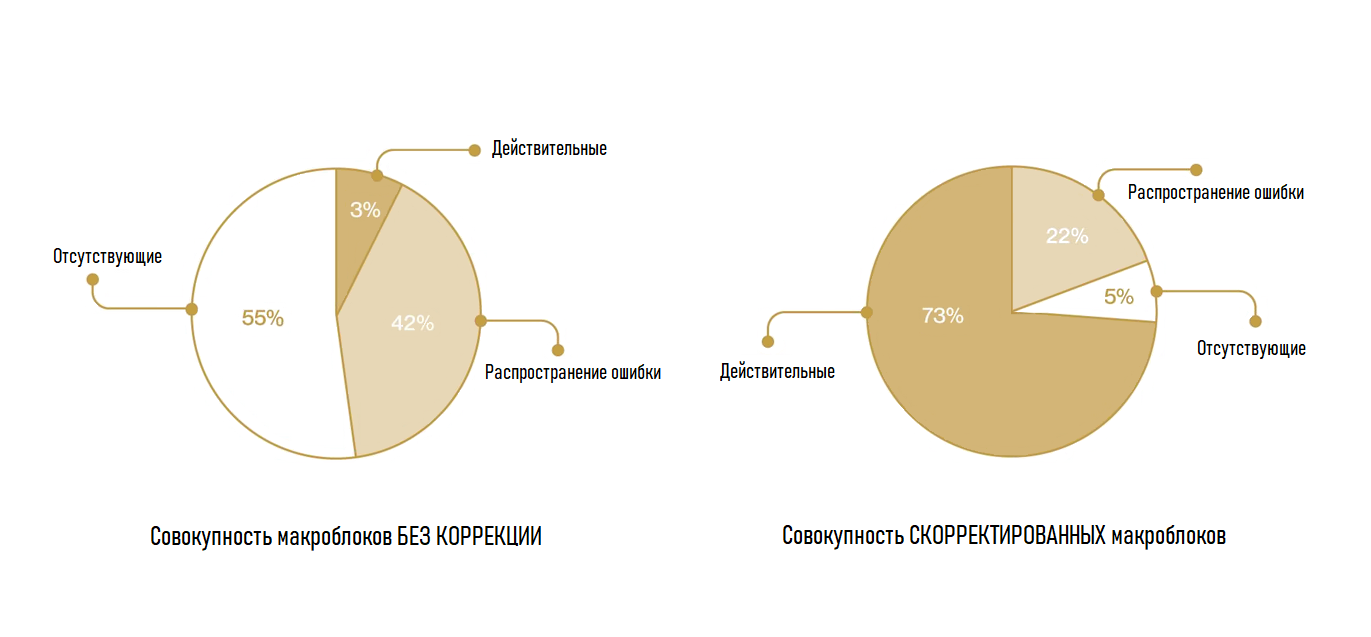
Dit algoritme vermindert de visuele impact van netwerkverliezen en biedt interoperabiliteit alle decoders, terwijl ze syntactisch een volledige stroom leveren: de ontbrekende delen van het beeld worden gereconstrueerd als ontbrekende delen, identiek aan die in het referentiebeeld.
Fouten zitten dus in die gebieden die gevoelig zijn voor verlies, en zijn niet van toepassing op het hele beeld.
De onderstaande grafieken tonen het succespercentage voor macroblokdecodering bij 5% netwerkverlies - met en zonder geavanceerde streamingfuncties van ANAFI Ai. Het algoritme zorgt voor een correcte decodering van 75% van de macroblokken. Ze stellen de gebruiker in staat zijn missie voort te zetten zonder het scherm te bevriezen of streaming te verliezen.
Congestiecontrole
Het algoritme evalueert ook de Wi-Fi- en radio-omgeving om te anticiperen op pakketverlies en netwerkcongestie en deze te voorkomen, wat de latentie helpt verminderen. Het algoritme is gebaseerd op een schatting van de kanaalcapaciteit, berekend op basis van de datasnelheid en het foutenpercentage op de fysieke laag; dan beïnvloedt het de netwerkcodering en inkapselingsparameters.
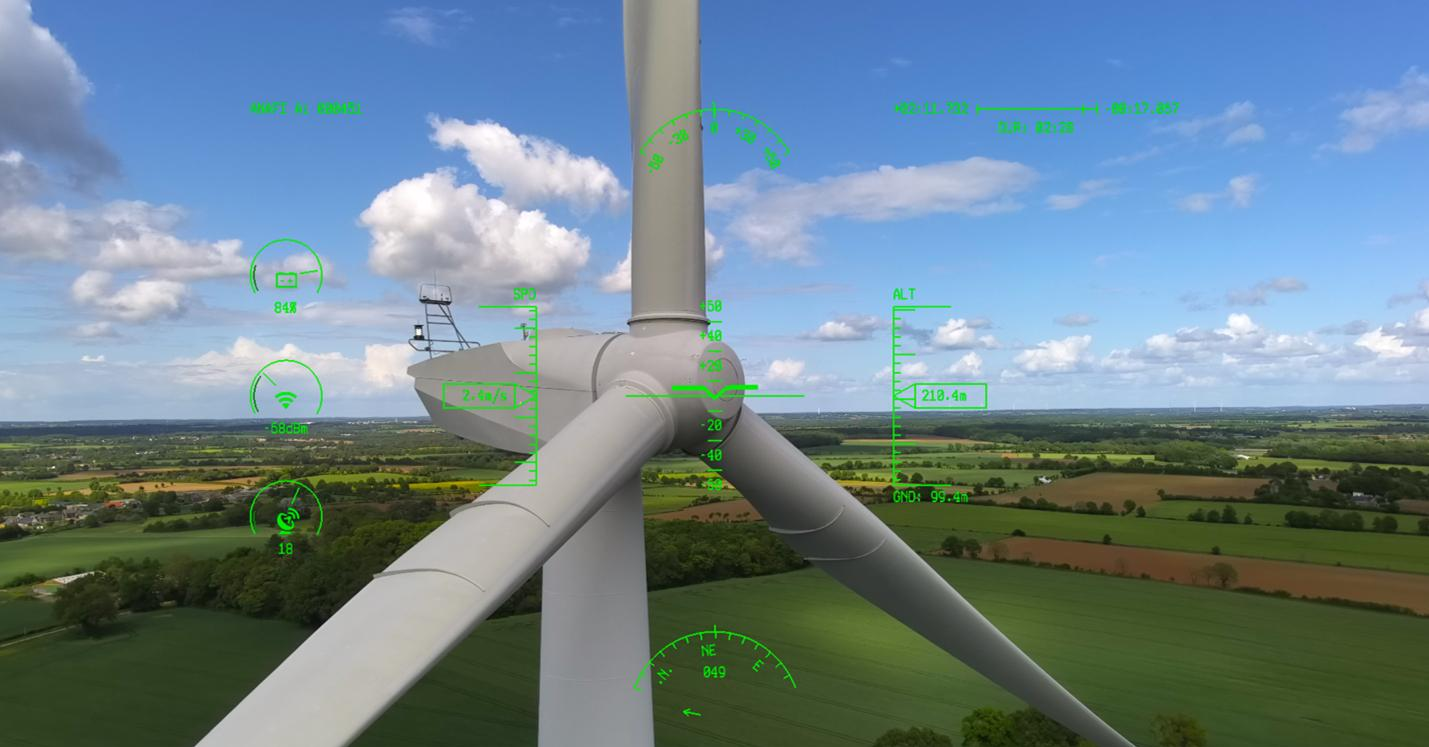
Metadata
Metadata wordt met de videostream verzonden. Ze bevatten met name drone-telemetrie-elementen (positie, hoogte, snelheid, batterijniveau, enz.) en videostatistieken (camerahoek, belichtingswaarde, gezichtsveld, enz.).
Synchronisatie van afbeeldingen en open metadata voert de functies uit van nauwkeurige positionering op de kaart, het volgen van vluchtinstrumenten in de HUD of het inschakelen van augmented reality-elementen.
Metagegevens worden opgenomen met behulp van standaardmethoden (RTP-headerextensie); het door Parrot gedefinieerde gegevensformaat is open source: het is beschikbaar in de ANAFI Ai SDK.
Camera

48MP-sensor
ANAFI Ai-matrix bevat een groot aantal megapixels voor gedetailleerde luchtfotografie.
Het maakt gebruik van Quad Bayer's kleurfilterarraytechnologie, waarbij groepen van 4 aangrenzende pixels dezelfde kleur hebben. Zo kan realtime HDR-opname worden verkregen in zowel de foto- als de videomodus door signalen van vier aangrenzende pixels toe te voegen.
Het dynamisch bereik is vier keer zo groot als dat van standaard Bayer-matrices. Zelfs complexe scènes kunnen worden gefilmd met minimale markeringen of verlies van schaduwdetail.
Lens
De ANAFI Ai-lens is speciaal ontwikkeld voor Parrot. Het combineert 6 asferische elementen en is geoptimaliseerd om optische overstraling te verminderen. Deze lens geeft 68° HFoV in standaard videomodus en 64,6° HFoV in standaard fotomodus.

Videomodi
ANAFI Ai legt vloeiende 4K-video vast met 60 frames per seconde, inclusief P-Log, en ook HDR10 4K video met maximaal 30 fps. In de onderstaande tabel staan alle ANAFI Ai-videomodi.

Videocodering
Gebruikers kunnen kiezen tussen H.264 (AVC) en H.265 (HEVC).
Alle resoluties gebruiken de volgende pixelformaten:
- YUV420p (8-bpc BT.709 kleurruimte) voor standaardmodus en HDR8.
- YUVJ420p (8 bits/component, volledig bereik - BT.709 kleurruimte) voor P-log-stijl.
- YUV420p10 (10bpc BT.2020 kleurruimte) voor HDR10-opname, alleen H.265.
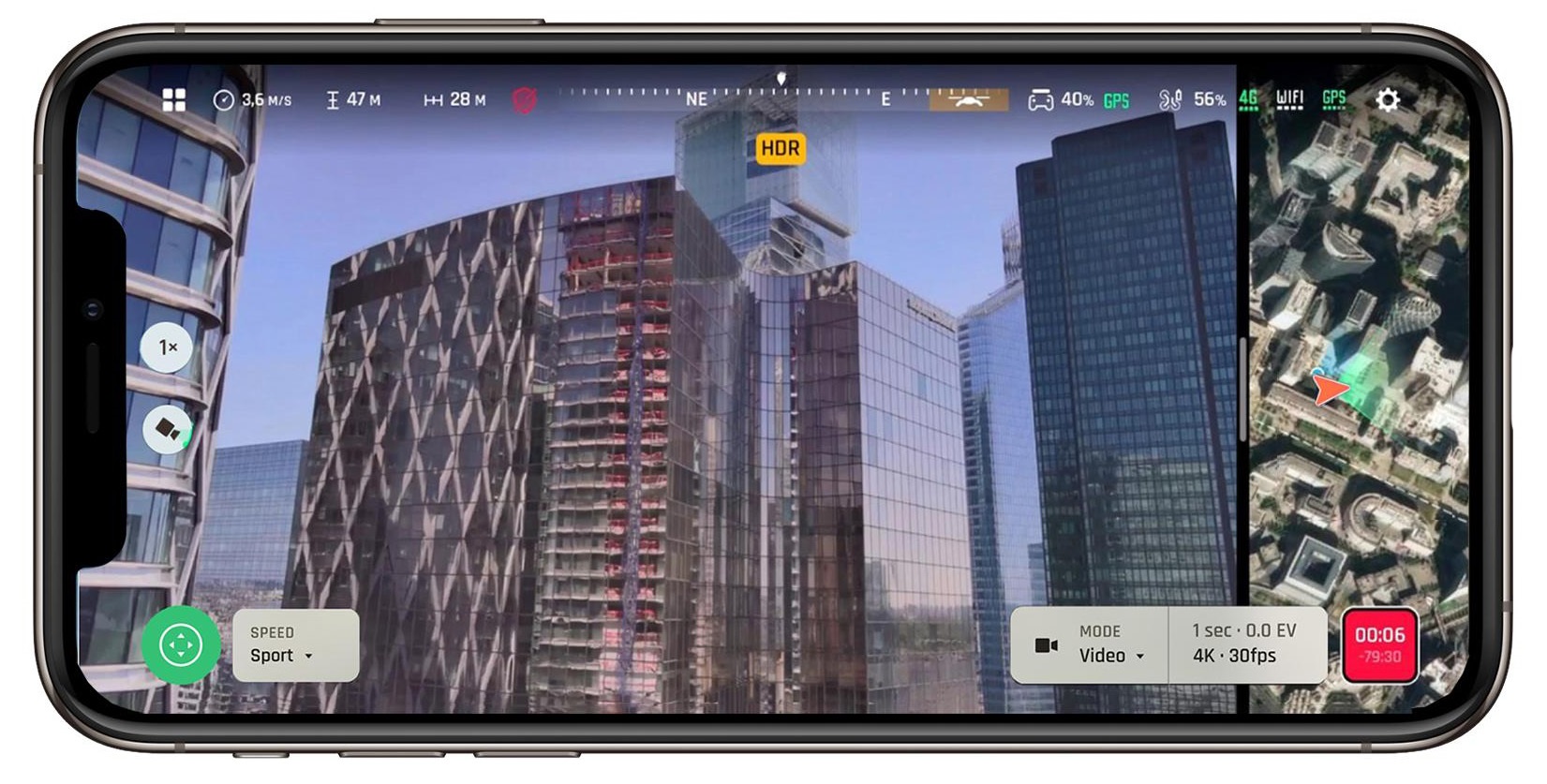
HDR
Bij het opnemen van video in HDR8 en HDR10 dekt ANAFI Ai een dynamisch bereik van 14EV. Het HDR10-formaat biedt een maximale helderheid van 1000 nits en een kleurdiepte van 10 bits. Het biedt een kleurengamma van miljarden versus 16 miljoen voor standaard dynamisch bereik. Vergeleken met HDR8 produceert HDR10 beelden die meer dan twee keer zo helder zijn met een overeenkomstige toename van het contrast. HDR8 kan op elk standaardscherm worden weergegeven, terwijl HDR10 voor tv's en HDR10-schermen is.
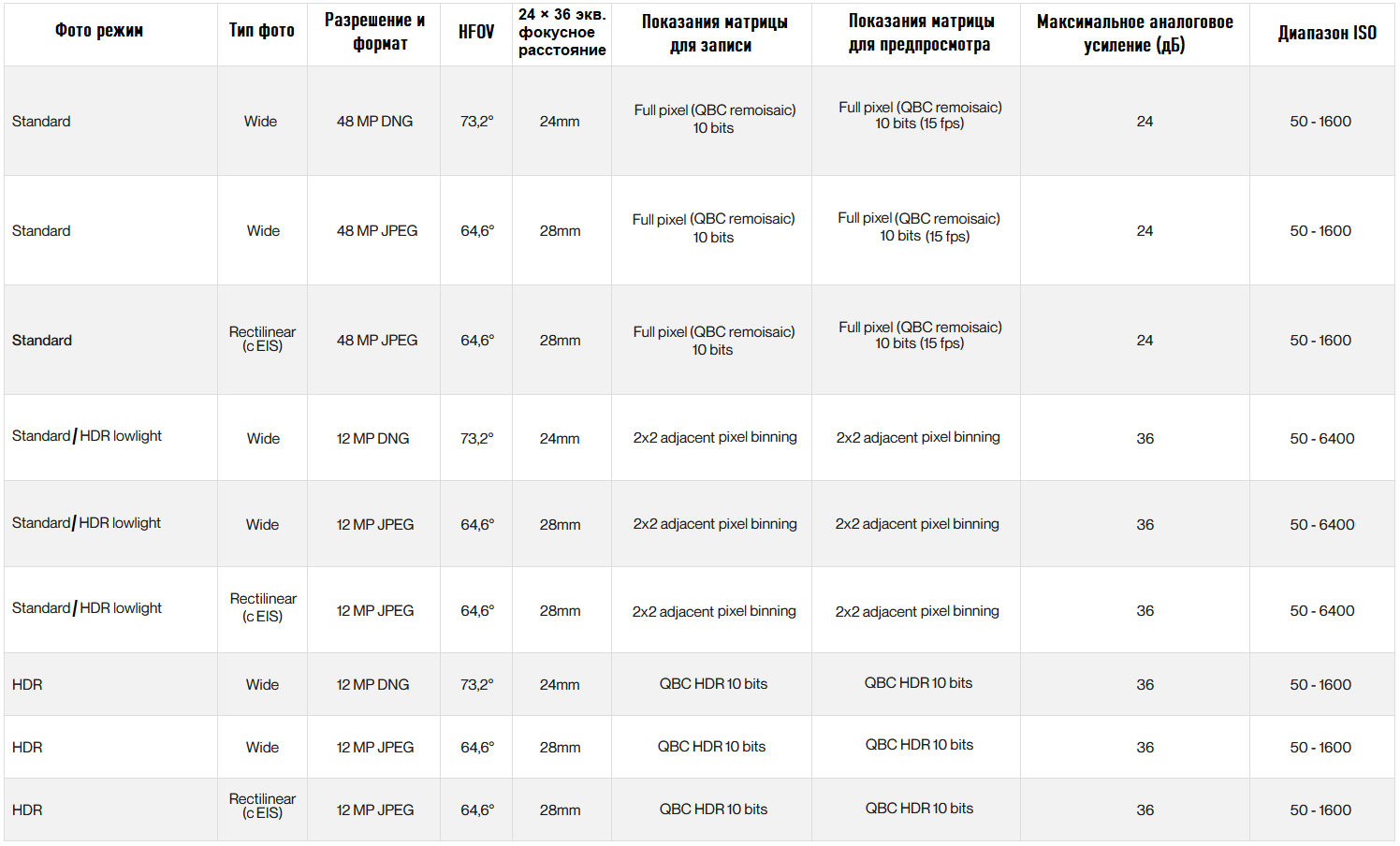
Fotomodi
Beschrijving van modi
Het gedeelte Modusregeling bevat instellingen die van invloed zijn op het aantal opnamen dat wordt gemaakt telkens wanneer de sluiter wordt ontspannen.
Enkele opnamestand
Standaard enkele opnamestand. Na elke ontspanknop wordt het vastgelegde beeld onmiddellijk door het systeem verwerkt.
Bracketing-modus
Gebruikers kunnen een reeks van 3, 5 of 7 frames opnemen met verschillende belichtingen voor elk frame. De volgende voorinstellingen zijn beschikbaar:
- [-1 EV, 0, 1 EV] (standaardinstellingen)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

Burst-modus
Burst-modus stelt de gebruiker in staat om een burst van 10 frames in 1 seconde te maken.
Panoramamodus
Panoramamodus bevat vier verschillende panoramische opnamen:
- Bolvormig (360°) is een panoramische modus bevat drie opties voor een bolvormig panorama schieten: Bol / Kleine Planeet / Tunnel.
- Horizontaal (180 °)
- Verticaal (109 °)
- Superwide - nieuwe super brede 9-beelds stitching-modus (HFOV 110 °, recht panorama)
Zie de onderstaande tabel voor details over de specificaties van de panoramamodus:

Timelapse-modus
In deze modus kunt u foto's maken met de volgende vaste intervallen:
- 48MP: 1, 2, 4, 10, 30 of 60 seconden.
- 12MP: 0,5, 1, 2, 4, 10, 30 of 60 sec.
GPS Lapse-modus
Deze fotomodus is ontwikkeld voor inspectie en fotogrammetrie. Hiermee kunt u foto's maken met de volgende vaste afstandsintervallen: 5, 10, 20, 50, 100 of 200 meter.
De onderstaande tabel toont de opnamemodi en resoluties voor stilstaande beelden, inclusief de sensoruitleesmodus:
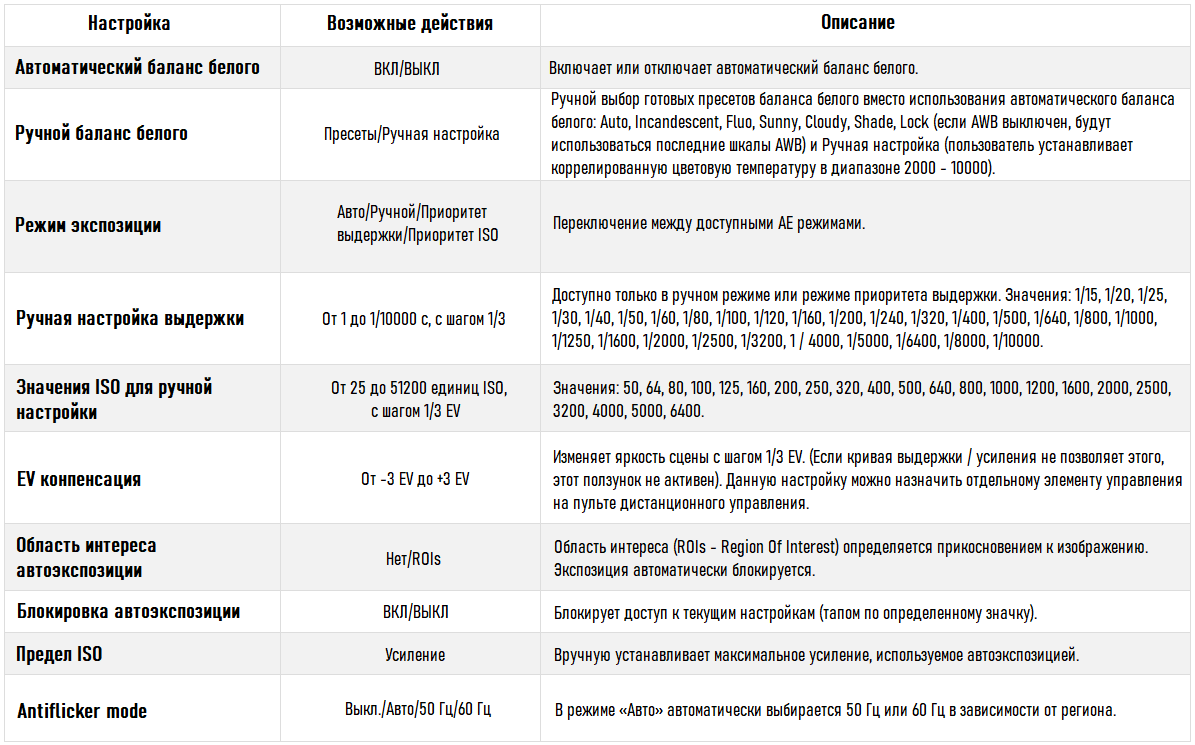
Instellingen
In het volgende tabel toont de beschikbare instellingen voor elke modus.
6x zoom
Zoom is beschikbaar in alle foto- en videomodi. In combinatie met een 48-megapixelsensor produceren nauwkeurige verscherpingsalgoritmen high-definition beelden, zelfs bij gebruik van 6x digitale zoom. ANAFI Ai-gebruikers kunnen nu details van 1 cm zien vanaf een afstand van 75 m. Dankzij het hoge aantal pixels kan 4K-video ook worden bijgesneden tot 1080p zonder kwaliteitsverlies.

Hybride stabilisatie
ANAFI Ai heeft de meest nauwkeurige stabilisatie op de micro-UAV-markt.
Het combineert gecombineerde stabilisatie:
- 3-assig mechanisch (3-assig mech. Gimbal)
- Elektronische 3-assige (EIS)
Mechanische stabilisatie stabiliseert de richtas van de camera, ongeacht de vluchtpositie van de drone. Elektronische beeldstabilisatie corrigeert microvibratie-effecten voor frequenties boven 100 Hz, die de mechanische aandrijving niet aankan.
Gimbal hoofdcamera
Met mechanische stabilisatie kunt u de horizontale as van het camerabeeld in alle 3 de assen stabiliseren en oriënteren.
 3 draaiassen mech. ophanging van de hoofdcamera ANAFI Ai.
3 draaiassen mech. ophanging van de hoofdcamera ANAFI Ai.
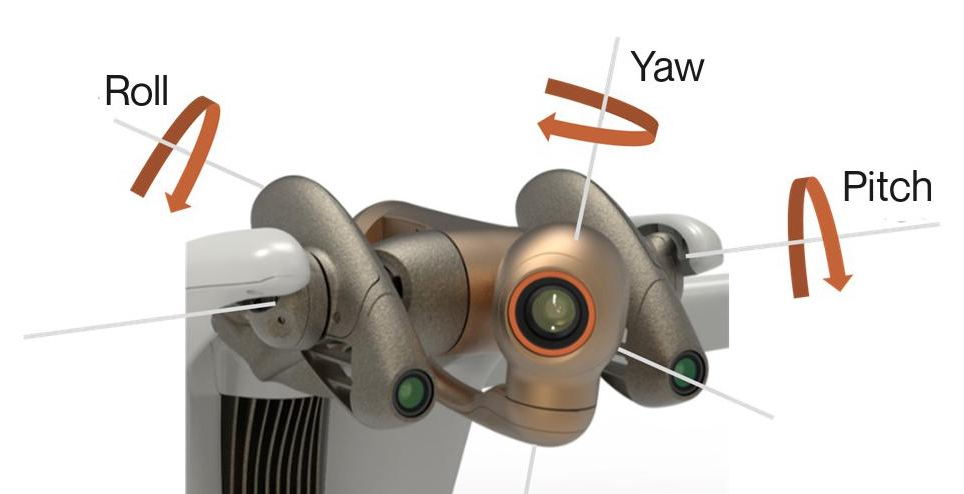
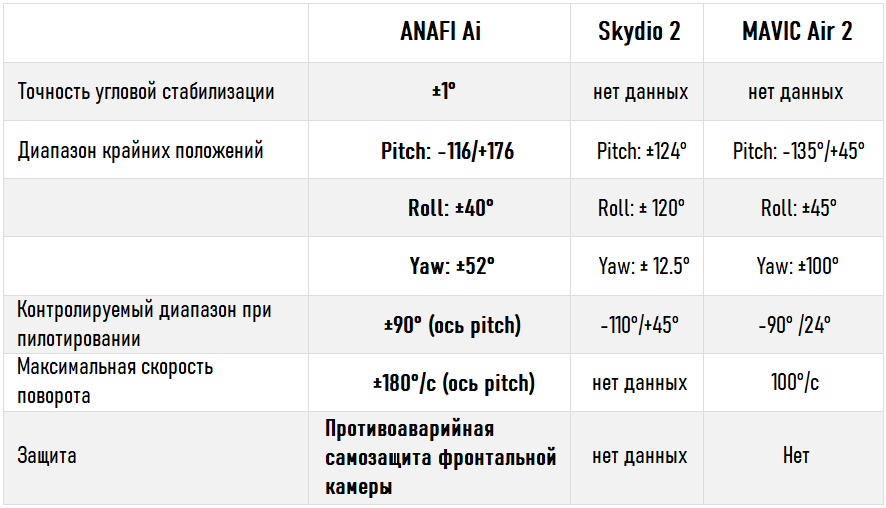
Belangrijkste kenmerken
- 3-assige mechanische gimbal voor hoofdcamera
- Verticale offset 292 °, gezichtsveld -116 ° tot 176 °
Gimbal-prestaties
- Het EIS-algoritme corrigeert de effecten van wiebelen en vervorming van de groothoeklens, en voert ook 3-assige digitale beeldstabilisatie (Roll, Pitch en Yaw).
- De methode bestaat uit het toepassen van een geometrische transformatie van het beeld. Geometrische transformatie wordt geassocieerd met tijdstempel en exacte positie dankzij de IMU.
- Op elk beeld wordt geometrische transformatie toegepast op basis van optische vervorming, trillingen en bewegingen van de gemeten camera-eenheid.
Draaibereik 292 °
De camera heeft een horizontaal draaibereik van -116 ° / 176 ° rond de pitch-as, waardoor observatie boven en onder de drone mogelijk is, wat een unieke kans op de markt micro-UAV.
![]()
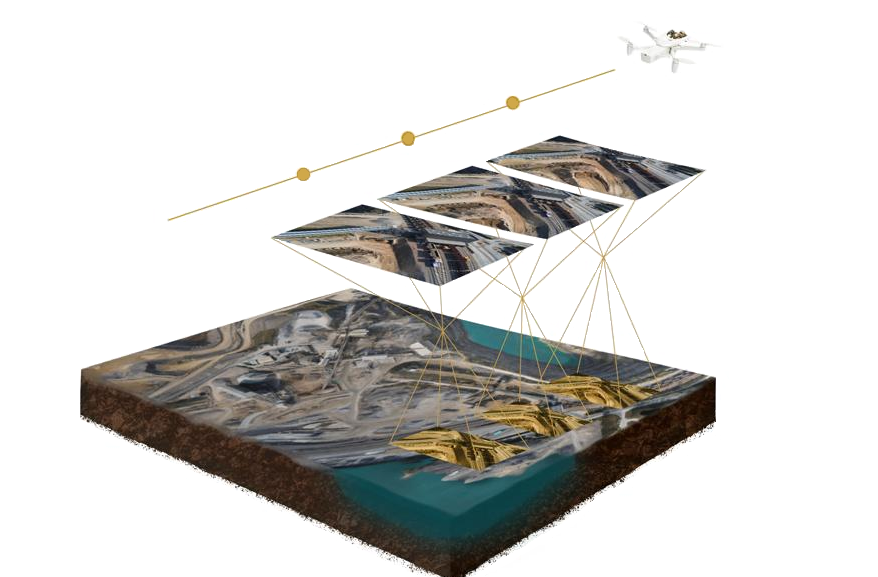
Fotogrammetrie
Luchtfotografie met onbemande luchtvaartuigen verandert de manier waarop specialisten inspecties en landmetingen uitvoeren. Fotogrammetriemethoden worden gebruikt om door UAV's verzamelde afbeeldingen te verwerken om 2D- en 3D-modellen te maken, waarmee klanten later het onderhoud van de onderzochte objecten tijdig kunnen plannen.
4G biedt ongekende betrouwbaarheid van de drone-datalink. Gebruikers kunnen UAV's bedienen over grote gebieden, in de buurt van metalen constructies, gebouwen, zonder angst voor communicatieverlies.
Inspectie en mapping
Door de AI van de ANAFI Ai-drone te combineren met het PIX4Dinspect online platform, kunnen gebruikers inspecties sneller en efficiënter dan ooit tevoren. Algoritmen voor machine learning herkennen antennes op zendmasten en bepalen hun grootte, hoogte, kanteling, azimut en verticaliteit.
Klik op de afbeeldingen hieronder om demo 3D-modellen te bekijken die zijn gegenereerd door ANAFI Ai.
Voorbeeld # 1

Voorbeeld # 2
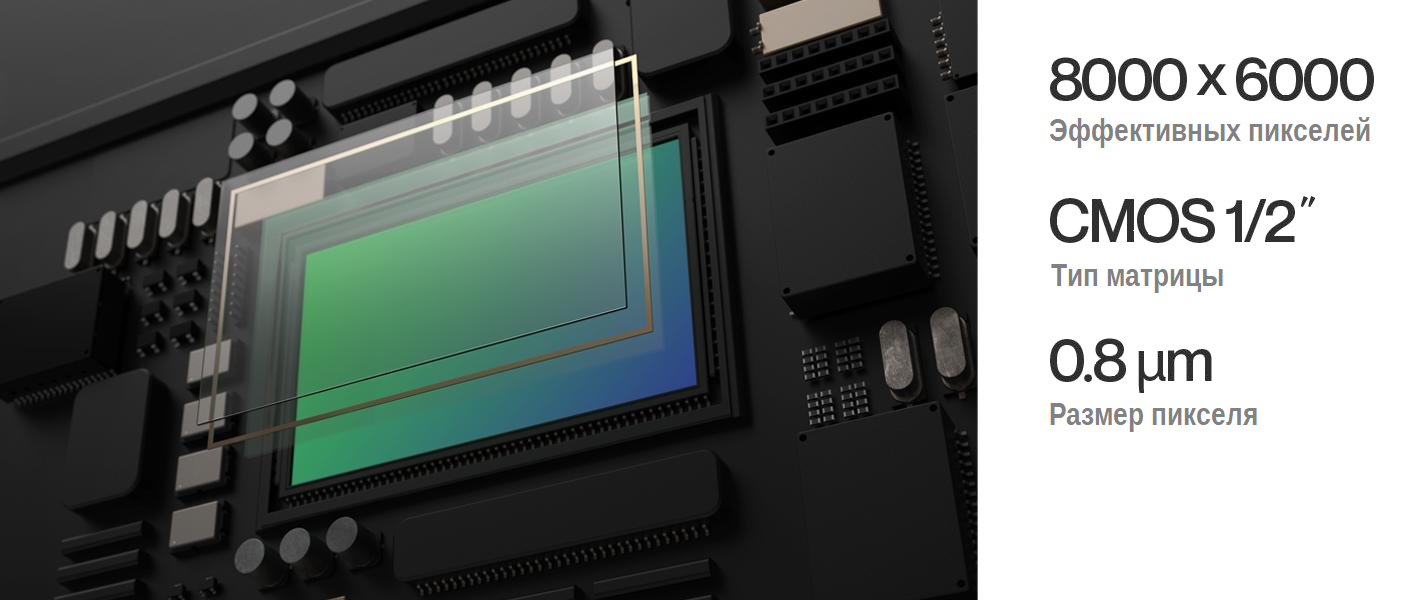
Best-in-class matrix
De camera van de ANAFI Ai-drone is uitgerust met een 48 MP 1/2-inch CMOS-sensor gebouwd met behulp van Quad Bayer-kleurfiltertechnologie, die meer dan ooit geschikt is voor inspectie en fotogrammetrie. De gebruikte matrix stelt u in staat gedetailleerde beelden te verkrijgen met een groot dynamisch bereik.
Foto's met hoge resolutie
ANAFI Ai kan stilstaande beelden van 48 megapixels genereren, waardoor alle details in hoge resolutie worden vastgelegd en een puntenwolk met hoge dichtheid wordt gecreëerd.
Aanzienlijke scherpte
Inspectiemissies vereisen de mogelijkheid om minieme details zoals serienummers, connectoren, roestvlekken en beginnende scheuren te identificeren.
Groot dynamisch bereik
10 stops dynamisch bereik in standaardmodus, 14 stops in HDR-modus. Optimale beeldgradatie is essentieel om consistente troebelingspunten en hoogwaardige 2D- of 3D-reconstructies te creëren.
55% meer detail dan 1-inch sensoren
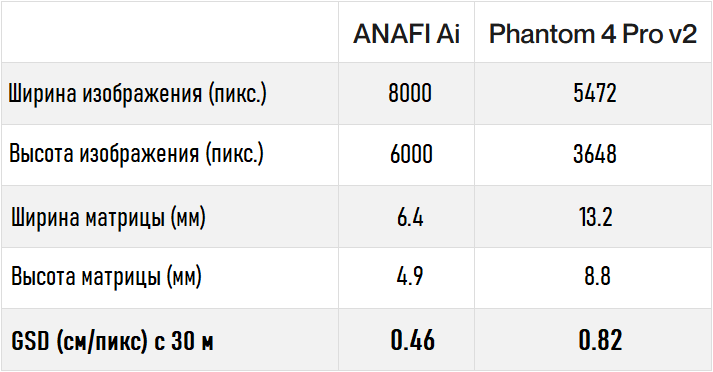
De 48 MP 1/2-inch Quad Bayer-sensor van de ANAFI Ai is scherper dan de 20 MP 1-inch sensoren die in een aantal moderne professionele drones worden gebruikt. De volgende afbeeldingen van de ANAFI Ai en DJI Phantom 4 Pro V2.0 dakinspectie op dezelfde hoogte tonen dit duidelijk aan.

Ideaal voor inspecties
De ANAFI Ai gimbal bevat een 6-assig hybride (mechanisch elektronisch) stabilisatiesysteem dat vluchtfluctuaties compenseert en zorgt voor beeldscherpte. De ANAFI Ai-camera heeft een instelbaar bereik van -90 ° tot 90 °, waardoor het een ideaal instrument in de lucht is om de onderkant van een brugbasis te bekijken.
Regelbare kanteling ± 90 °
Nauwkeurigheid
Met ANAFI Ai kunnen gebruikers een GSD van 0,46 cm / px bereiken vanaf een hoogte van 30 m, wat betekent relatieve nauwkeurigheid planimetrie tot 0,92 cm
Ter vergelijking: op dezelfde hoogte biedt de DJI Phantom 4 Pro V2 een GSD van slechts 0,82 cm / px. Met andere woorden, ANAFI Ai kan hetzelfde doel in kaart brengen, meer dan 1,5 keer hoger vliegen dan de Phantom, met een gelijkwaardig detailniveau.
AI- en 4G-mogelijkheden
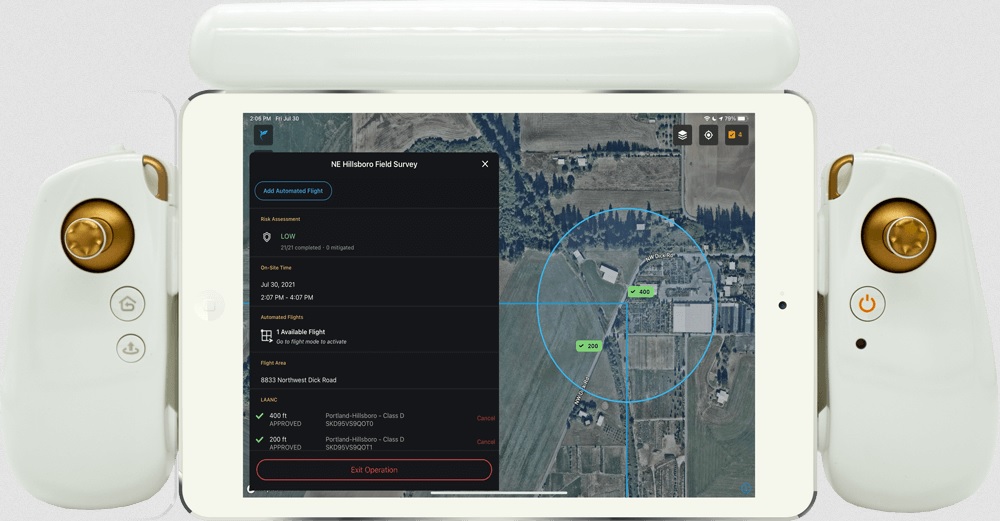
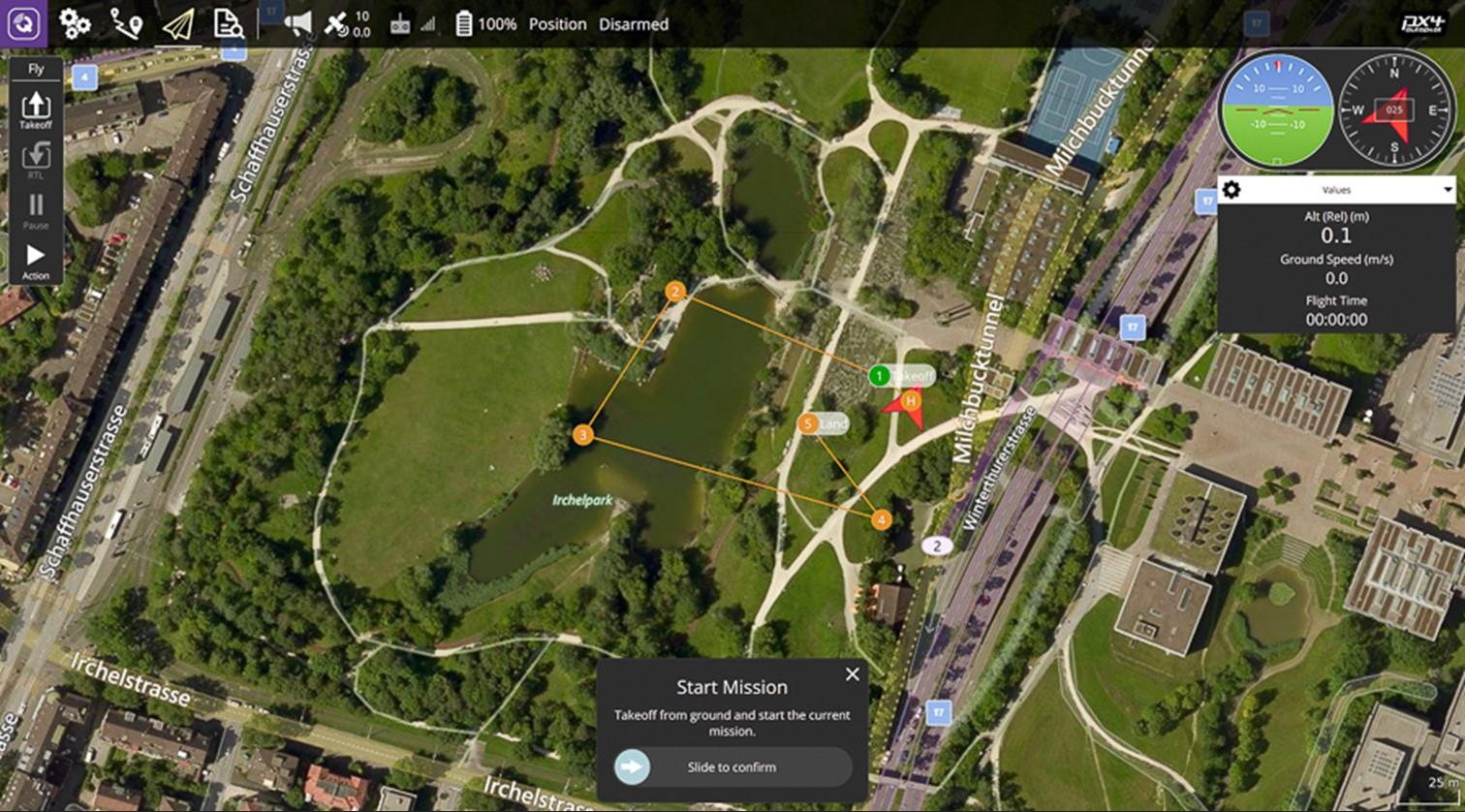
Eén app. Elk vluchtplan
Het potentieel van de FreeFlight 7 mobiele applicatie stelt de gebruiker in staat om alle onderzoeks-, inspectie- en fotogrammetriemissies te starten.

Beschikbare fotogrammetrische vliegmodi
De volgende fotogrammetrische vliegmodi zijn nu beschikbaar in de FreeFlight 7 mobiele applicatie:
- Raster
- Dubbel raster
- ircular
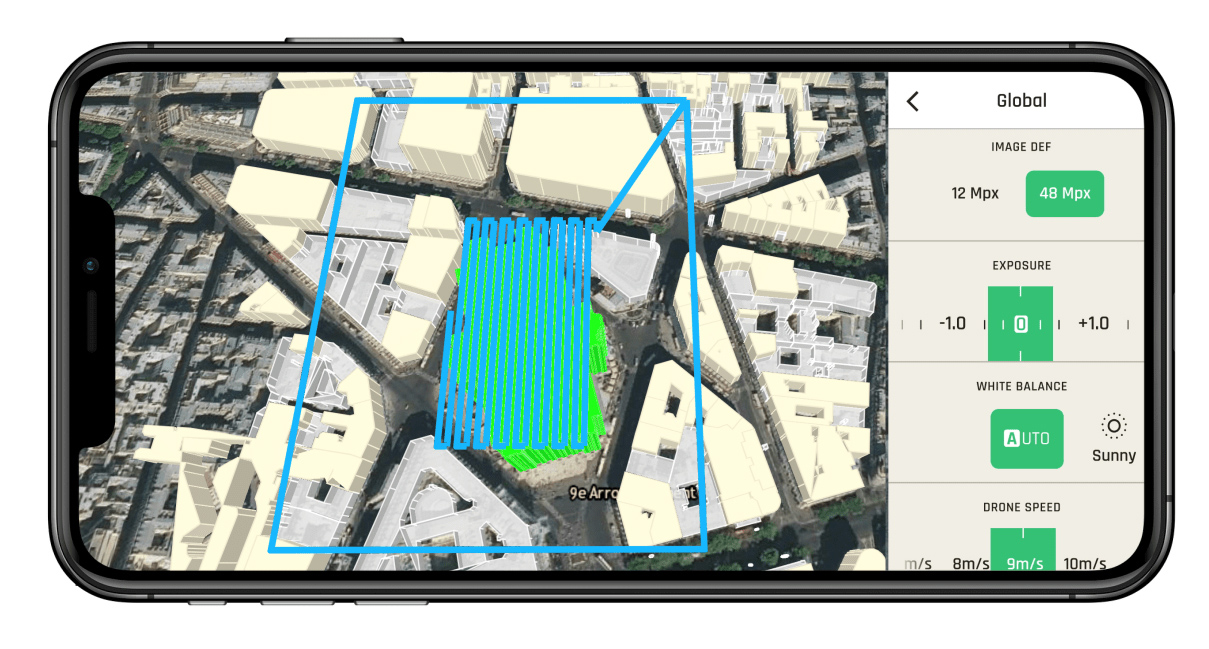
Maak een vluchtplan met één tik
Eén tik op de interactieve FreeFlight 3D-kaart is alles wat u nodig hebt voor het snel scannen van gebouwen. Kunstmatige intelligentie bepaalt automatisch de optimale vluchtparameters en het traject. 48MP-beelden met nauwkeurige georeferentie van ANAFI Ai-sensoren (IMU, GNSS en Flight Time) maken een nauwkeurige 3D-reconstructie mogelijk.
 Automatisch vluchtplan gemaakt met één tik in het 3D-kadaster.
Automatisch vluchtplan gemaakt met één tik in het 3D-kadaster.
- De cartografische achtergrond van FreeFlight 7 is afkomstig van ArcGIS-software. De 3D-weergave van gebouwen is gebaseerd op OpenStreetMap-gegevens over steden over de hele wereld.
- Visualisatiesystemen zorgen voor de veiligheid van een bepaald vluchtplan: gebruikers hoeven zich geen zorgen te maken over obstakels. ANAFI Ai vermijdt ze autonoom.
Autonome vlucht
Het ANAFI Ai omnidirectionele sensorsysteem, gebaseerd op stereoscopisch zicht, oriënteert zich automatisch in de rijrichting.

De drone detecteert obstakels die zich op 30 meter afstand bevinden. AI-technologie bouwt constant het infill-raster op en werkt het bij tijdens het uitvoeren van een bepaald vluchtplan. Het vertegenwoordigt de drone-omgeving in voxels.
De algoritmen bepalen het beste traject om botsingen met obstakels te vermijden terwijl de drone gefocust blijft op zijn doel: de toegewezen vluchtmissie.

4G-verbinding
ANAFI Ai is de eerste commerciële microdron die is uitgerust met een 4G-module. Het dekt meer dan 98% van de frequenties die wereldwijd worden gebruikt.

Overzicht van hoogspanningsleidingen. Geschoten met ANAFI Ai, bewerkt met Pix4Dmatic. Scènegrootte: 4060 × 60 × 70 m. Aantal afbeeldingen: 2172. GSD: 1,3 cm / pix. Hoogte: 90 m. Voor-/zijoverlapping: 90% / 65%.
De drone kan naadloos overschakelen van Wi-Fi naar 4G en vice versa, waardoor de meest betrouwbare verbinding wordt geboden, wat op zijn beurt garandeert:
- De mogelijkheid om voer BVLOS-vluchten uit
- Stabiele verbinding, zelfs in omgevingen met obstakels en gebouwen
- Veilig vliegen in omgevingen met veel lawaai
- Videoverbindingskwaliteit 1080p @ 30 fps
- Direct uploaden van afbeeldingen naar cloudservers

Vliegtijdoptimalisatie
Volgens de ontwikkelaar werd door de hoge afbeelding een aanzienlijke tijdwinst behaald kenmerken van ANAFI Ai:
- Met 48 MP kan de drone meer dan 1,5 keer hoger vliegen dan drones met 20 MP 1-inch sensoren, terwijl dezelfde GSD wordt bereikt. Met andere woorden, grotere hoogte en snellere missie gaan hand in hand.
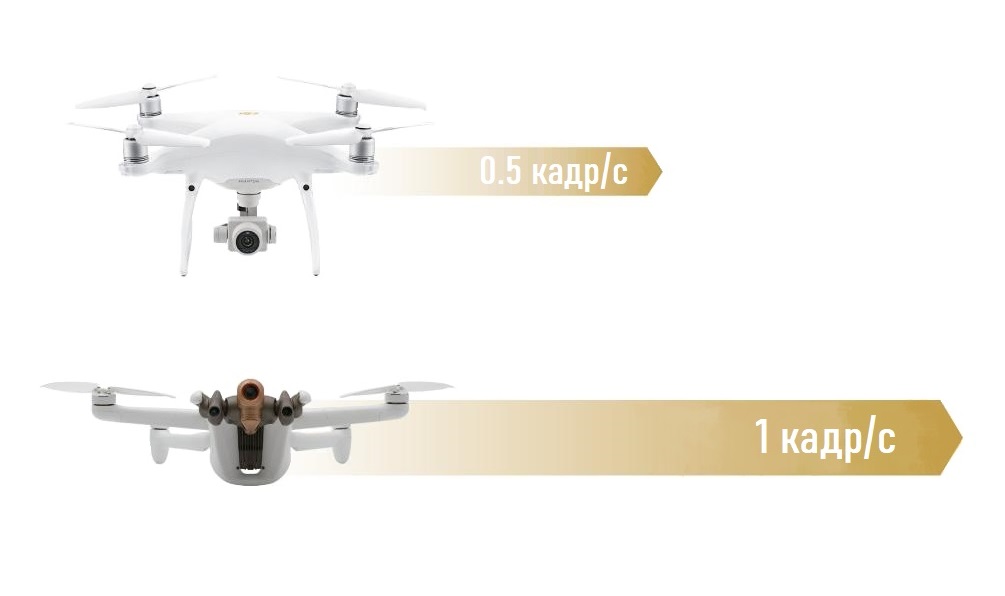
- 1 fps fotografie: ANAFI Ai schiet twee keer zo snel als Autel EVO 2 en DJI Phantom 4 Pro V2.0.
4G-overdracht tijdens de vlucht naar PIX4Dcloud
In het proces van het maken van een digitaal model van luchtfoto's van een drone, het overbrengen van bestanden en het verwerken foto's zijn twee tijdrovende taken. ANAFI Ai helpt gebruikers hun workflow te versnellen. Het dronesysteem maakt met name het volgende mogelijk:
- Overdracht van beelden naar beveiligde servers tijdens de vlucht met behulp van de 4G-verbinding van de drone.
- Begin onmiddellijk met het berekenen van objecten aan het einde van de vlucht: orthomosaics, puntenwolk, hoogtemodellen en getextureerde mesh.
- Deel eenvoudig 2D-kaarten en 3D-modellen van onderzoekskwaliteit met medewerkers en klanten.
![]()
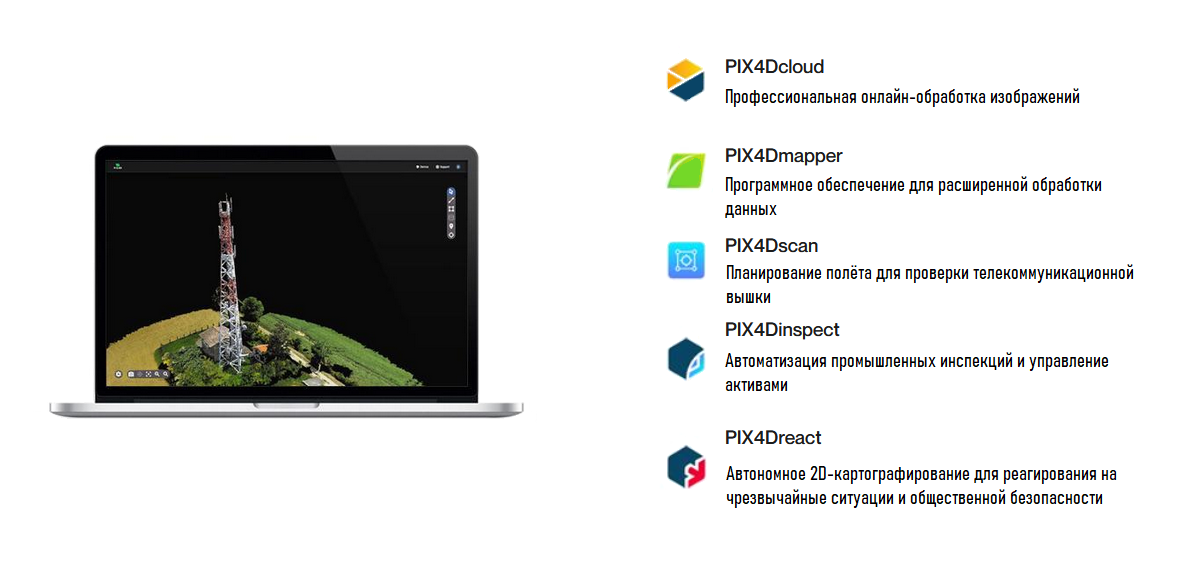
PIX4D Suite-compatibiliteit
ANAFI Ai is nu volledig compatibel met een unieke suite van mobiele, desktop- en cloudfotogrammetrietoepassingen, bestaande uit:
Fotogrammetrie of lidar
Waarom kiezen voor fotogrammetrie voor onderzoeken en inspecties? Naast toegankelijkheid en gebruiksgemak is luchtfotogrammetrie de beste keuze wanneer visuele interpretatie van gegevens vereist is.
Fotogrammetrie pro's
- Biedt meerdere visualisaties: orthomosaic, gekleurde puntenwolk, getextureerde mesh.
- Creëert een wolk van punten met een hogere dichtheid, die elk een aanzienlijke hoeveelheid informatie bevatten (hoogte, textuur, kleur).
- Overtreft LIDAR in nauwkeurigheid van fotorealistische 2D- en 3D-weergaven - LIDAR biedt geen hoog niveau van contextueel detail.
LIDAR nadelen
- Kost 100 keer meer dan een UAV met een RGB-matrix.
- De complexiteit van gegevensverwerking en mogelijke interpretatiefouten.
- Kleurinformatie toevoegen is mogelijk, maar bemoeilijkt het proces.
- LIDAR genereert alleen puntenwolken en is bedoeld voor specifieke gevallen en situaties.
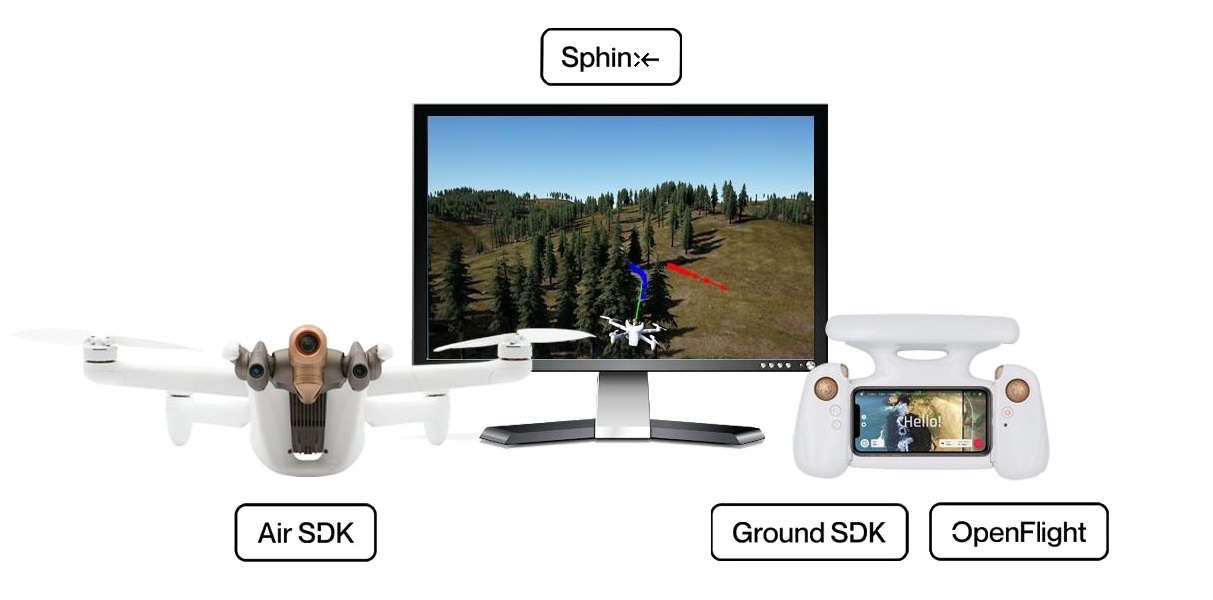
SDK
De Parrot Software Development Kit is een open source set tools en software voor ontwikkelaars. Sinds de oprichting van de eerste drone A. R. Drone, de open source-software van het bedrijf, ondersteunt ontwikkelaarsplatforms en -tools, en Parrot
De ontwikkelaar verduidelijkt dat alle SDK-bronnen van het bedrijf gratis beschikbaar zijn, zonder registratie en tracking, op de portal " Parrot Ontwikkelaarsportaal"... U kunt zich ook aansluiten bij de duizenden ontwikkelaars op het Parrot-forum waar u actuele onderwerpen rechtstreeks met de ingenieurs van het bedrijf kunt bespreken.
Air SDK
Voer uw code uit op ANAFI Ai
Air SDK biedt een revolutionaire technologie-architectuur om code te downloaden en uit te voeren direct bij ANAFI Ai. Ontwikkelaars kunnen op maat ontworpen vluchtmissies programmeren met toegang tot alle dronesensoren, verbindingsinterfaces en stuurautomaatfuncties.
Air SDK biedt toegang aan boord tot:
- Alle sensoren (IMU, GPS, TOF) en vluchtmodi
- Videostream en metadata met alle camera's
- Communicatie-interfaces Wi-Fi, 4G, USB
- Dieptekaarten en vulroosters
- Aanmaken van een traject om obstakels te ontwijken
Elke ontwikkelaar kan:
- De status van de drone wijzigen door vluchtmissies te maken
- De navigatiemodus wijzigen
- Ingesloten Linux-processen toevoegen (voor bijvoorbeeld gegevens overbrengen via 4G-kanaal of computer vision gebruiken)
De Air SDK ondersteunt de programmeertaal C of Python. Air SDK wordt geleverd met een gedetailleerde installatiehandleiding en API-documentatie. Vele toepassingsvoorbeelden illustreren alle mogelijkheden die de unieke architectuur biedt.
Ground SDK
Bouw een krachtige mobiele app
De Ground SDK is een Ground Control Station (GCS) softwareplatform voor mobiele apparaten (zowel iOS als Android worden ondersteund). Hiermee kan elke ontwikkelaar een mobiele applicatie voor ANAFI Ai maken om de drone vervolgens rechtstreeks vanaf een mobiel apparaat te besturen. Alle BVS-functies (besturing, video, instellingen) zijn beschikbaar via een gebruiksvriendelijke en volledig gedocumenteerde API.
OpenFlight
Open Source Ground Control Station
Voor de eerste keer opent Parrot de broncode voor zijn grondcontrolestation-applicatie. OpenFlight is de kern van onze beroemde open source FreeFlight 7-app. Hierdoor kan de ontwikkelaar zich concentreren op het toevoegen van eigen functionaliteit en heeft hij direct een professioneel ogende app klaar om te publiceren in de AppStore.

OpenFlight bevat:
- Alle UX FreeFlight 7
- Alle interface-instellingen
- Code voor realtime 3D-visualisatie van obstakels
- Code voor het beheer van 4G-communicatie
- OpenFlight wordt gepubliceerd onder een BSD-3-licentie met een complete installatiegids en uitgebreide documentatie.
Sphinx
3D fotorealistische simulatie
Parrot Sphinx is een geavanceerde drone-simulatietool. Parrot-technici gebruiken het om alle ANAFI Ai-functies te ontwikkelen en te testen. Het algemene concept is om de daadwerkelijke firmware van de drone met al zijn sensoren in een visueel en fysiek realistische omgeving te simuleren.

Parrot Sphinx maakt het volgende mogelijk:
- Alle camera's en sensoren simuleren
- Dieptekaarten en segmentatie simuleren afbeeldingen
- Navigeer door veel realistische 3D-scènes
- Verbinding maken met verschillende soorten afstandsbedieningen
- Gebruik scripts om de simulatie te besturen
- Voetgangers en voertuigen toevoegen
- Visualiseer en registreer vluchtgegevens
- Pas vliegtuigsensoren en omringende fysieke elementen aan
- Regel real-time factor
Parrot Sphinx is gebouwd op basis van geavanceerde standaard componenten:
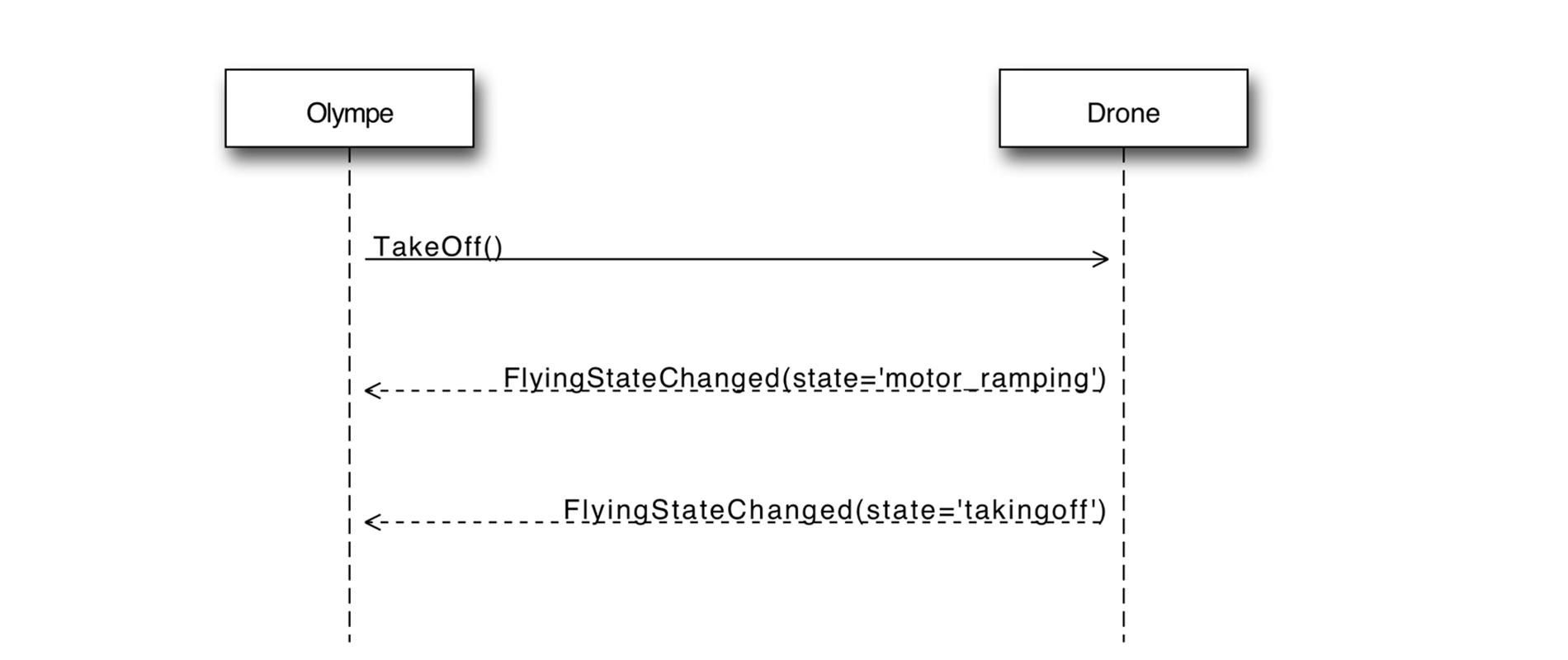
Olympe
Python om ANAFI Ai te besturen
Olympe biedt een programmeerinterface voor Python-controllers voor ANAFI Ai. Het oorspronkelijke doel van Olympe was om te communiceren met de Sphinx-modelleringsomgeving. Olympe kan ook een fysieke ANAFI Ai bedienen vanaf een externe computer.
Olympe-framework maakt het volgende mogelijk:
- Verbinding maken met gesimuleerde of fysieke ANAFI Ai
- Opdrachtberichten verzenden (besturing, cameraoriëntatie, terugkeer naar huis, Flight Plan)
- Start en stop het streamen van video van alle camera's
- Videostream en gesynchroniseerde metadata opnemen
) PdrAW
Geavanceerde mediaspeler
PDrAW is een geavanceerde videoviewer voor ANAFI Ai-media. De viewer ondersteunt zowel streaming (RTP/RTSP) als opgenomen (MP4) video op Linux-, macOS-, Android- en iOS-platforms. PDrAW wordt geleverd als een bibliotheek (libpdraw), een wrapper-bibliotheek (libpdraw-backend) en een zelfstandig uitvoerbaar bestand (pdraw).
PDrAW beheert ook videometadata. Op ANAFI Ai bevatten zowel streaming als opgenomen video metadata die openbaar beschikbaar en gedocumenteerd zijn, waardoor geavanceerde videoverwerking vanuit de lucht mogelijk is.
Modellen C. A. D.
Parrot levert 3D-modellen van hun drones voor integratie in uw CAD-ontwerp voor snelle prototyping en integratie van accessoires.
MAVLink en GUTMA-compatibiliteit
ANAFI Ai is compatibel met het standaard open source MAVLink v1-protocol, dat realtime gegevensuitwisseling tussen de UAV en het controlestation mogelijk maakt. ANAFI Ai kan handmatig worden bestuurd of met behulp van automatische vluchtplanning vanaf een MAVLink-compatibel basisstation zoals QGroundControl.
* QGroundControl-interface
ANAFI Ai is compatibel met het GUTMA open source standaard vluchtgegevensprotocol. De Global UTM Association is een consortium van grote spelers op het gebied van luchtverkeersleiding.

Grootste partnerecosysteem voor drones Parrot
Parrot blijft het wereldwijde ecosysteem van softwareleveranciers voor drones uitbreiden via haar partner SDK-programma het aanbieden van gespecialiseerde en unieke oplossingen voor de groeiende en evoluerende behoeften van professionele gebruikers.
Parrot voor elke zakelijke behoefte
Om het meeste uit het inspectieproces te halen, biedt Parrot zijn klanten een ecosysteem van compatibele drone-software, variërend van vlootbeheer, compilatievluchten plannen en importeren van vluchtlogboeken, vóór het fotograferen, in kaart brengen, bewaken en analyseren van de ontvangen gegevens.
PIX4D × Parrot
2D / 3D-modelleringstoepassingen. Een unieke set mobiele, desktop- en cloudfotogrammetrie-applicaties.
Verizon x Skyward x Parrot
4G LTE-drone-oplossing in de Verenigde Staten. De eerste in zijn soort ANAFI Ai robotdrone verbonden met het Verizon 4G LTE-netwerk met vooraf geïnstalleerde Skyward-software. Maakt de weg vrij voor bijna realtime gegevensoverdracht, implementatie op afstand en out-of-line-of-sight vluchten.

Skyward × Parrot
Integratie en leren binnen ANAFI-capaciteit. Platform voor luchtvaartbeheer inclusief luchtruim, LAANC-toegang en training, uitrusting en connectiviteit voor de inzet van enterprise drone-vloot.

DroneSense × Parrot
Bouw, beheer en schaal je drone-programma's. Professionals in onbemande luchtvaartuigen in de openbare veiligheidssector kunnen de volledige reeks DroneSense-mogelijkheden gebruiken, speciaal ontworpen voor de behoeften van eerstehulpverleners.

Parrot Ecosystem Partners

Parrot Affiliate Program
De ontwikkelaar stelt voor om de mogelijkheden van zijn programma voor drones door hun SDK te integreren.
Cyberbeveiliging
Vertrouwelijkheid van gegevens
De ontwikkelaar merkt op dat hij geen geen gegevens zonder toestemming van gebruikers. De beslissing om al dan niet gegevens naar de Parrot-infrastructuur over te dragen, ligt uitsluitend bij de gebruikers zelf. De gegevens die in Parrot worden gehost, stellen de gebruiker in staat om vluchtgegevens en vluchtplannen tussen verschillende apparaten te synchroniseren, ondersteuning te vergemakkelijken en Parrot in staat te stellen zijn producten te verbeteren.
ANAFI Ai voldoet aan de Algemene Verordening Gegevensbescherming van de Europese Unie (AVG) en gaat verder, u kunt bijvoorbeeld alle gegevens met 1 klik verwijderen, waardoor gebruikers de gemakkelijkste controle hebben. Dit probleem met één klik wordt opgelost in de FreeFlight7 mobiele applicatie of in de privacy-instellingen van het Parrot. Cloud-account. Zo kunnen gebruikers op elk moment niet alleen stoppen met het uitwisselen van gegevens, maar ook eenvoudig verzoeken om verwijdering.
Als de gebruiker instemt met de uitwisseling van gegevens, wordt de verwerking ervan uitgevoerd in een volledig transparant formaat, in detail beschreven in het Parrot-privacybeleid.
Wanneer ANAFI Ai via 4G is verbonden met Skycontroller 4, wordt de Parrot-infrastructuur gebruikt om de drone en de afstandsbediening te koppelen. Als de gebruiker niet is ingelogd op een Parrot. Cloud-account, kan hij nog steeds gebruikmaken van een 4G-verbinding met een uniek tijdelijk account. Bij gebruik van de Parrot-infrastructuur voor 4G-koppeling, wordt de video gecodeerd met een sleutel die is overeengekomen tussen de drone en de afstandsbediening. Parrot heeft geen toegang tot niet-gecodeerde video.

FIPS140-2-compatibel en CC EAL5 Secure Element
ANAFI Ai heeft een ingebouwd Wisekey-beveiligingselement dat NIST-compatibel is FIPS140-2 Level 3 en Common Criteria EAL5 gecertificeerd. Een soortgelijk beveiligingselement is ook ingebouwd in de besturingshardware van de Skycontroller 4.
Functies van het beveiligingselement:
- Voert cryptografische bewerkingen uit
- Bewaart en beschermt vertrouwelijke informatie
Het gebruikt een persoonlijke ECDSA-sleutel met domeinparameters P521, die uniek is voor elke drone. Het kan niet worden geëxtraheerd uit het beveiligingselement. En het certificaat dat aan deze sleutel is gekoppeld, is ondertekend door een certificeringsinstantie.
Wisekey beschermt de integriteit van de firmware, biedt unieke drone-identificatie voor 4G-koppeling en sterke authenticatie, en unieke digitale handtekening van foto's die door de drone zijn gemaakt.

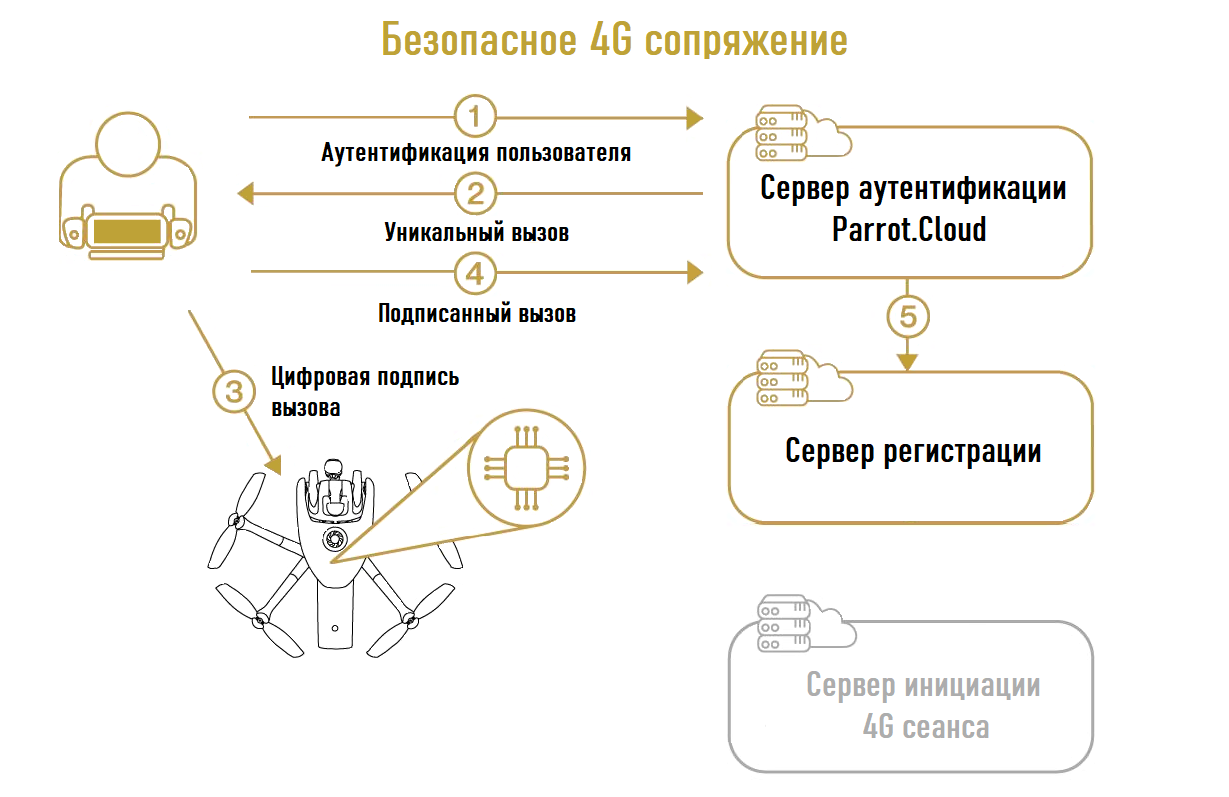
4G beveiligde verbinding en sterke authenticatie
het proces van veilig koppelen van apparaten. Tijdens dit proces bevestigt de gebruiker betrouwbaar dat hij verbonden is met een specifieke drone. Dankzij ANAFI Ai Secure Element kan hij dit doen zonder een wachtwoord in de drone in te voeren.
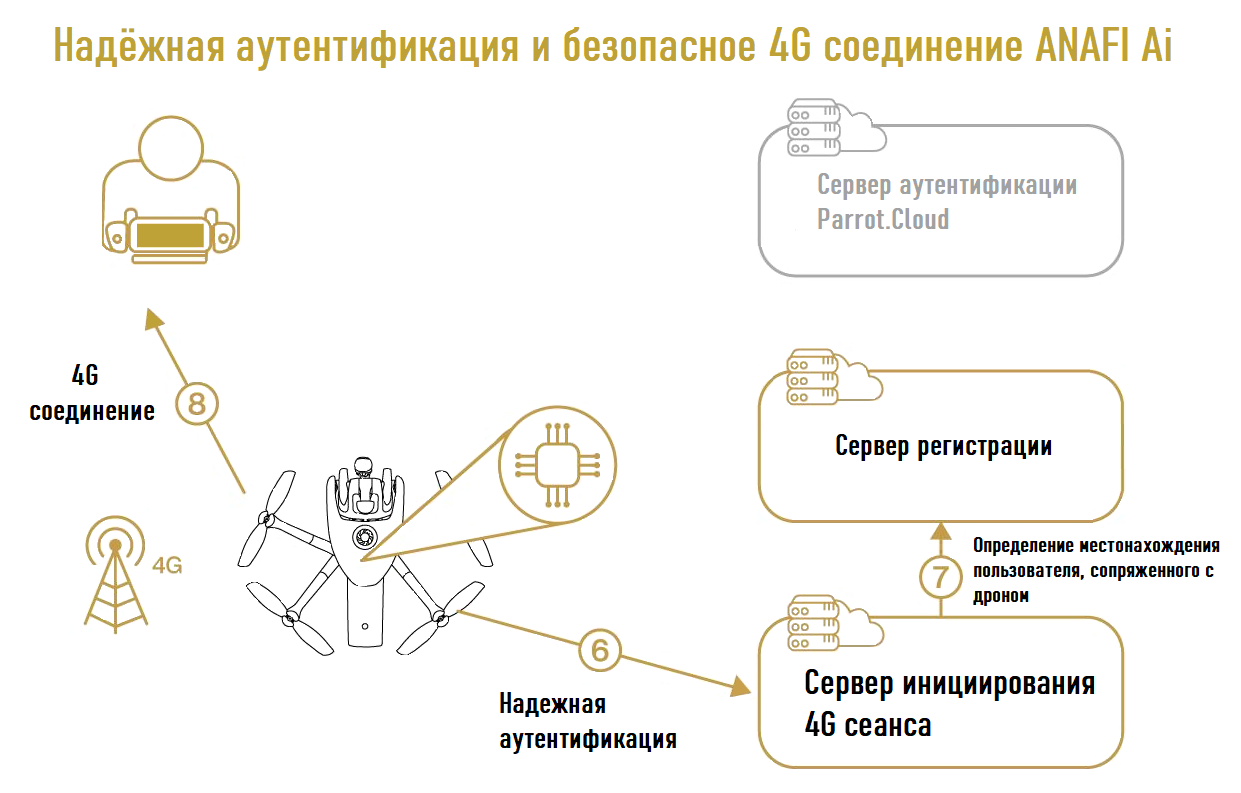
De Parrot-servers registreren vervolgens de communicatie tussen de gebruiker en de drone. Wanneer de wifi-verbinding tussen de gebruiker en de drone wegvalt, schakelt ANAFI Ai automatisch over naar een 4G-verbinding. ANAFI Ai voert sterke authenticatie uit op Parrot-servers met behulp van de privésleutel die is opgeslagen op het Secure Element. Parrot-servers zoeken naar verbonden gebruikers en bieden een interface tussen ANAFI Ai en Skycontroller 4.
Om dronecontrole en videostreams die naar Skycontroller 4 komen te beschermen, ondersteunt ANAFI Ai TLS-, DTLS- en SRTP-protocollen.
Veilige initialisatie en upgrade
De opstartvolgorde van het vliegtuig is beveiligd: het systeem controleert dat het Parrot-software gebruikt en dat er niet met deze software is geknoeid. Bij elke initialisatie wordt een veiligheidscontrole uitgevoerd. De updateservice regelt ook de digitale handtekening van software-updates.
Gebruikerssleutels configureren op het Secure Element
ANAFI Ai-gebruikers hebben toegang tot een speciaal operatoraccount Secure Element. Dit account wordt gebruikt om sleutels in te stellen die relevant zijn voor deze gebruiker. Gebruikers kunnen het Secure Element configureren met de openbare sleutels van de missieproviders die ze vertrouwen. ANAFI Ai voert alleen missies uit die met deze sleutels zijn ondertekend. Dit proces voorkomt dat aanvallers kwaadaardige vluchtmissies uitvoeren op de drone.
Digitaal ondertekende foto's
Secure Element van ANAFI Ai kan drone-afbeeldingen digitaal ondertekenen. Deze handtekening is het bewijs dat:
- De gesigneerde afbeelding is gemaakt door het aangegeven onbemande luchtvaartuig.
- Noch de afbeelding zelf, noch de metadata ervan zijn verwerkt (al dan niet vrijwillig) - de metadata, ook wel EXIF en XMP genoemd, bevat informatie over de datum, tijd en locatie van de afbeelding.

Met andere woorden, de digitale handtekening beschermt alle gegevens met betrekking tot de afbeelding, inclusief de plaats en tijd waarop deze is vastgelegd en welke ANAFI Ai-drone.
Zowel gebruikers als partners die softwareoplossingen aanbieden met dronefotografie, kunnen de digitale handtekening van ANAFI Ai-foto's verifiëren met het dronecertificaat of via de openbare-sleutelcatalogus van Parrot.
Transparantie en voortdurende veiligheidscontroles met Bug bounty
Parrot gebruikt waar mogelijk standaardprotocollen en bestandsformaten. Er is geen versluierde code of verborgen functies. Hierdoor kan de gebruiker begrijpen hoe Parrot-producten werken en hun veiligheid testen. Bovendien is OpenFlight, de software die wordt gebruikt om de drone te besturen, open source, waardoor gebruikers volledige controle hebben.
In april 2021 lanceerde Parrot het Bug Bounty-programma met YesWeHack, Europa's eerste crowdsourced beveiligingsplatform. Door deze samenwerking maakt Parrot gebruik van de enorme cybersecurity-onderzoeksgemeenschap van YesWeHack om mogelijke kwetsbaarheden in zijn drones, mobiele apps en webservices te identificeren.
Het Bug Bounty-programma bestaat uit twee fasen:
Privéprogramma's bieden aanvankelijk exclusieve toegang aan geselecteerde beveiligingsonderzoekers en omvatten toekomstige Parrot-dronemodellen. De ervaring en diverse vaardigheden van de onderzoekers zullen het hoge beveiligingsniveau van de producten bevestigen voordat ze op de markt komen, wat de veiligheid van Parrot-gebruikers en de bescherming van hun gegevens zal helpen verbeteren.
Na deze eerste ronde van het particuliere Bug Bounty-programma en na commercialisering komen de producten in het publieke programma. Hun beveiliging wordt vervolgens streng gecontroleerd door de hele YesWeHack-gemeenschap van meer dan 22.000 cyberbeveiligingsonderzoekers.

Gegevensbeheer
Met Parrot Cloud kunnen gebruikers die ervoor kiezen hun gegevens te delen, vlucht- en vlootgegevens beheren, evenals multimedia gegevens ontvangen door hun drones.
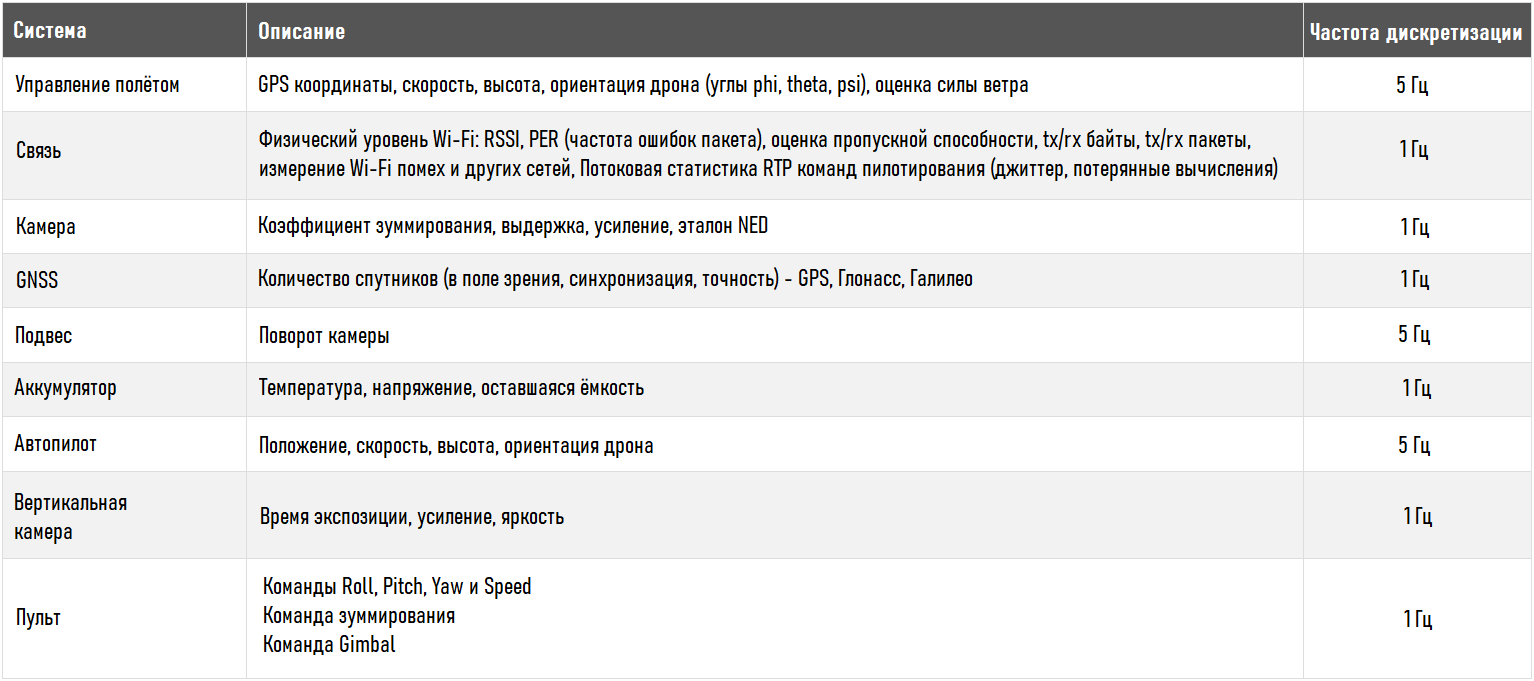
Verzamelde gegevens
Parrot Cloud verzamelt 4 soorten gegevens:
Statisch (productgegevens):
- Vliegtuigen serienummer
- Serienummer batterij
- Firmwareversie vliegtuig en batterij
- Hardwareversie vliegtuig en batterij
- Apparaatmodel
- FreeFlight 7 Release Versie
Gebeurtenissen
- Waarschuwingen: Batterij, stuurautomaat, sensoren
- Communicatie: verbinden / loskoppelen, start streaming, storingswaarschuwing, zwak signaal
- Camera: streaming-statistieken, instellingswijzigingen
- Vlucht: statusverandering (opstijgen, landen, zweven, enz.), activering van een vliegtaak (vliegplan, fotogrammetrie)
"Contextuele beelden"
- Timelapse- snapshot en (eens per 2 minuten)
- Deep Learning (meer objecten in kaart brengen, landschappen om de vluchtautonomie te verbeteren, volgen, obstakel vermijden)
- Stereovisie (dieptekaart)
- Afbeeldingen geactiveerd per gebeurtenis
- Begin en einde van nauwkeurige zweefverklaringen, nauwkeurige landing
- Drone-crash
- Gezichten worden automatisch wazig tijdens verzending
Telemetrie
Eindgebruik van verzamelde gegevens
Parrot verzamelt en gebruikt alleen gegevens van klanten die ermee hebben ingestemd deze te delen om de kwaliteit te verbeteren van zijn producten...
Onderhoudsbeheer
Preventief onderhoud: Onze tools verzamelen alle informatie met betrekking tot missies (missietype, start- en landingstijden, aantal missies, drone-locatie, vliegsnelheid, vluchtplan en AirSDK-instellingen). Hiermee kunt u in realtime nauwkeurige informatie ontvangen over de status van de ANAFI Ai-dronesvloot (evenals hun controllers en batterijen).
Correctief onderhoud: De verzamelde informatie is nuttig om snel de status van een bepaalde drone of batterij te bepalen.
Verbetering van kunstmatige intelligentie (AI)
De AI-elementen van ANAFI Ai (PeleeNet, convolutionele netwerken, enz.) bieden gebruikers ongeëvenaarde diensten en functies: het vermijden van obstakels, target tracking, verschillende vliegmodi. De kwaliteit van AI hangt af van de kwantiteit en kwaliteit van de verzamelde data (afbeeldingen en video’s): deze data voedt machine learning. Daarbij is datakwaliteit niet het enige bepalend element: ook de metadata die bij deze data hoort is van fundamenteel belang. Daarom verzamelt onze tool regelmatig afbeeldingen en metadata, afhankelijk van de gebeurtenissen, voor in totaal 30 tot 50 MB per minuut.
Vliegeigenschappen
Aerodynamische eigenschappen
Aandrijving en aerodynamica
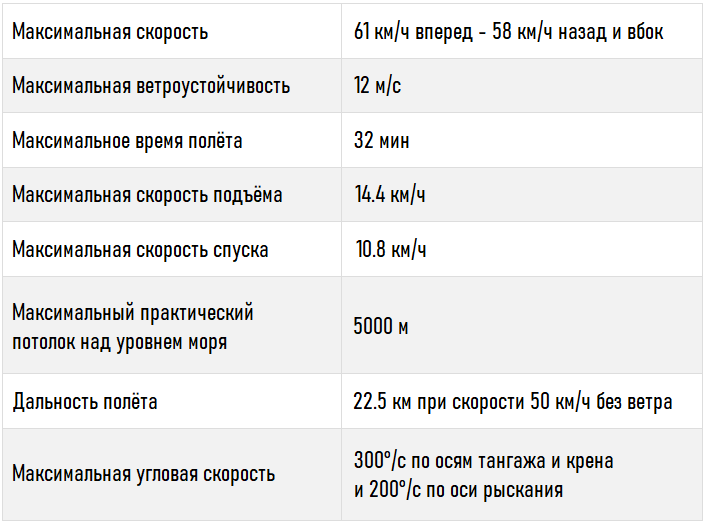
 CFD-afbeelding van ANAFI Ai-propellerbladen
CFD-afbeelding van ANAFI Ai-propellerbladen
Nieuwe biomimicry-propellerbladen met een bultrugachtige voorrand van walvissen. Deze aanpak maakte het mogelijk om de voortstuwingsefficiëntie van de krachtcentrale te vergroten, die aan de uitgang een toename van de stuwkracht opleverde bij hetzelfde toerental. Dit effect is vergelijkbaar met een toename van de rotordiameter.
Akoestische ruis, vooral tonale ruis, afkomstig van de leading edge wordt ook verminderd. Daarom is ANAFI Ai stiller [71,5 dB SPL (A) op 1 m] dan Skydio 2 [76,4 dB SPL (A) op 1 m].
- Vliegtijd meer dan 32 minuten
- Dankzij de geoptimaliseerde aerodynamische eigenschappen van de romp en het ANAFI Ai-voortstuwingssysteem is de maximale snelheid in voorwaartse vlucht 61 km/u, met zijvlucht en achterwaartse vlucht 58 km / h
- Max. windweerstand 12,7 m/s.
- Dankzij het hoge koppelrendement van de motor / propeller en de hoge autonomie van de batterij is het bereik 22,5 km (bij een constante snelheid van 50 km / u bij rustig weer).
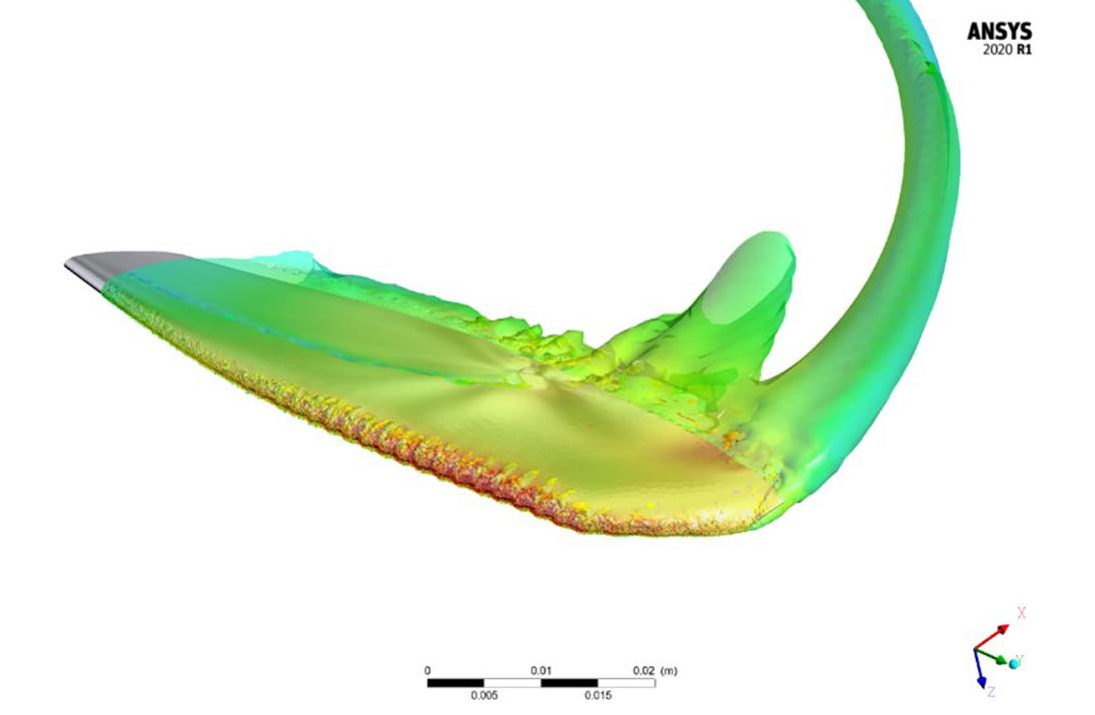
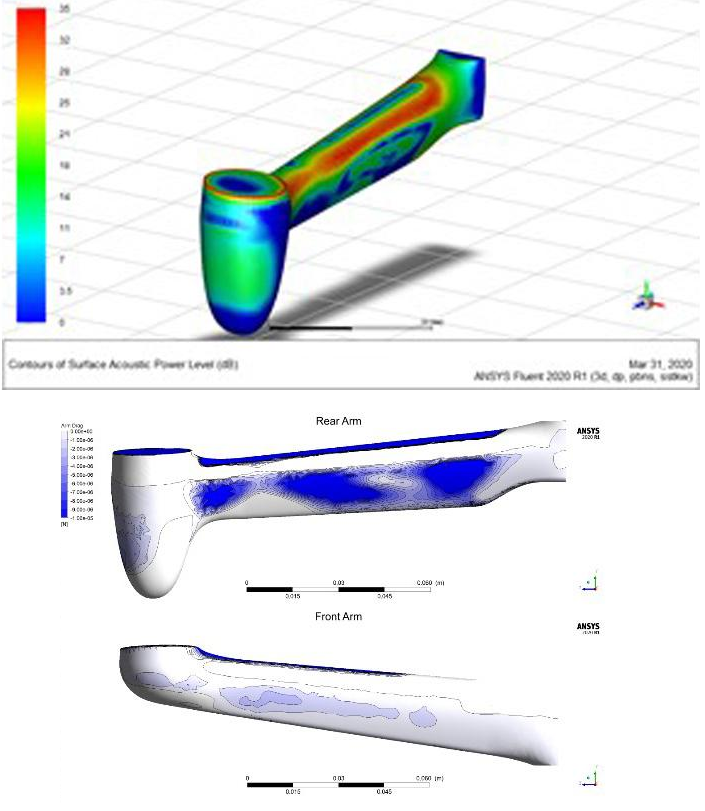 CFD-afbeeldingen van ANAFI Ai-stralen
CFD-afbeeldingen van ANAFI Ai-stralen
Sensoren
Om een veilige vlucht te garanderen ANAFI Ai is uitgerust met:
- 2 × IMU (ICM-40609-D en ICM42605)
- Magnetometer LIS2MDL
- GPS-module UBX-M8030
- TI OPT3101 time-of-flight (ToF)
- Barometer LPS22HB
- Verticale camera
Sensorkenmerken
Vlucht IMU: ICM-40609-D
- 3-assige gyroscoop
- Bereik: ± 2000 ° / s
- Resolutie: 16,4 LSB / ° / s
- Offset / Nauwkeurigheid: ± 0,05 ° / s (na thermische en dynamische kalibratie)
- 3-assige versnellingsmeter
- Bereik: ± 16 g
- Resolutie: 2.048 LSB / mg
- Offset / nauwkeurigheid: ± 0,5 mg (XY) ± 1 mg (Z) (na thermische en dynamische kalibratie)
- Temperatuurregeling s: geregeld verwarmingssysteem in relatie tot de omgevingstemperatuur, gestabiliseerd binnen: ± 0,15 ° C
- Meetfrequentie: 2 kHz
Magnetometer: LIS2MDL
- Bereik: ± 49,152G
- Resolutie: 1,5 mG
- Offset / Nauwkeurigheid: ± 15 mG (na compensatie, bij maximaal motortoerental)
- Meetfrequentie: 100 Hz
Barometer: LPS22HB 1
- Bereik: 260 tot 1260 hPa
- Resolutie: 0,0002 hPa
- Offset / nauwkeurigheid: ± 0,1 hPa
- Temperatuurregeling: geregeld verwarmingssysteem in relatie tot de omgevingstemperatuur, gestabiliseerd binnen: ± 0,2 ° C
- Meetfrequentie: 75 Hz
- Meetruis: 20 cm RMS
GNSS: UBX-M8030 1
- Keramische patchantenne 25 × 25 × 4mm, waardoor 2 dB versterkingsverbetering mogelijk is ten opzichte van ANAFI 1
- Gevoeligheid: koude start -148 dBm / tracking en navigatie: -167 dBm
- Time-To-First-Fix: 40 seconden
- Nauwkeurigheid / Nauwkeurigheid: Positie (standaarddeviatie 1,4 m), Snelheid (standaarddeviatie 0,5 m / s)
Verticale camera
- Beeldsensor formaat: 1/6 inch
- Resolutie: 640 × 480 pixels
- Beeldsensor met globale sluiter
- Zwart-wit
- FOV: Horizontale beeldhoek: 53,7 ° / verticale beeldhoek: 41,5 °
- Brandpuntsafstand: 2,8 mm
- Meting van de snelheid van optische stroom op de grond bij 60 Hz
- 15Hz & nauwkeurige pasvorm @ 5Hz
ToF: TI OPT3101
- Bereik: 0-15 m
- Resolutie: 0,3 mm
- Nauwkeurigheid b: ± 2 cm (na kalibratie)
- Meetfrequentie: 64 Hz
Verticale camera IMU: ICM-42605
- 3-assige gyroscoop
- Bereik: ± 2000 ° / s
- Resolutie: 16,4 LSB / ° / s
- Offset / nauwkeurigheid: ± 0,1 ° / s (na dynamische Kalibratie)
- 3-assige versnellingsmeter
- Bereik: ± 16g
- Resolutie: 2,048 LSB / mg
- Offset / nauwkeurigheid: ± 2,0 mg (XY) ± 5,0 mg (Z) - na dynamische kalibratie
- Meetfrequentie: 1 kHz
- Hardwaresynchronisatie met verticale camera, nauwkeurigheid: 1 μs
Autopilot
De ANAFI Ai Flight Controller biedt eenvoudige en intuïtieve besturing: er is geen training vereist om hem te bedienen. Hiermee kunt u veel vliegmodi automatiseren (Flight Plan, Cameraman, Hand take-off, Smart RTH). Sensorfusie-algoritmen combineren gegevens van alle sensoren om de ANAFI Ai-verhouding, hoogte, positie en snelheid te schatten.
Toestandsbeoordeling is essentieel voor het goed functioneren van drones. Quadcopters zijn inherent onstabiel wanneer de vluchtcontroller wordt gebruikt met een open lus; om ze gemakkelijk te besturen, om nog maar te zwijgen van autonome besturing, is het noodzakelijk om ze te stabiliseren met behulp van closed-loop besturingsalgoritmen. Deze algoritmen berekenen en sturen de commando's naar de motoren die ANAFI Ai nodig heeft om de gewenste trajecten te bereiken.

Binnenvlucht
Bij afwezigheid van een GPS-signaal vertrouwt ANAFI Ai voornamelijk op verticale camerametingen om de snelheid en positie te schatten. De prestaties van de verticale camera worden bepaald door twee hoofdalgoritmen:
- Optische stroom voor snelheidsschatting
- Sleutelpuntdetectie en afstemming voor positieschatting
Verticale camera algoritmen kunnen werken bij weinig licht dankzij de ANAFI Ai die is uitgerust met een paar LED-lampjes naast de verticale camera. Ze zorgen ervoor dat de drone stabiel blijft, vooral wanneer hij binnenshuis vliegt of bij afwezigheid van GPS, op een hoogte van minder dan 5 m boven de grond. Het vermogen van de LED-verlichting past zich automatisch aan, afhankelijk van de behoeften van het algoritme.
Autonome vlucht
Belangrijkste kenmerken
- Roterend detectiesysteem met breed gezichtsveld
- Extractie van de diepte van de omringende ruimte op basis van de stereo-uitlijning en de diepte door beweging
- Weergave van de omgeving in de vorm van een raster van vulling
- Autonome detectie en vermijding van obstakels op snelheden tot 29 km/u
In dit hoofdstuk worden de sensoren, hardware en algoritmen beschreven die door ANAFI Ai worden gebruikt om autonoom vliegen mogelijk te maken. Het is als volgt georganiseerd:
- Een gedetailleerde beschrijving van het ANAFI Ai-perceptiesysteem
- Perceptuele algoritmen die worden gebruikt om de 3D-omgeving rond de drones te reconstrueren
- Herschikking en obstakel vermijding

Perceptiesysteemstrategie
De perceptie van de driedimensionale omgeving is een belangrijk vermogen om autonoom vliegen te bereiken, vooral in krappe ruimtes. Het is een voorwaarde voor gegarandeerde detectie en vermijding van obstakels, wat de last voor de drone-operator vermindert, het succes van de missie vergroot en de veiligheid van het vliegtuig garandeert.
Om het volledige potentieel van een vliegende camera te ontketenen, die onbeperkt in alle richtingen kan bewegen en roteren, is een effectieve sensoroplossing nodig. In het bijzonder moet het detectiesysteem informatie over de omgeving kunnen ontvangen in richtingen die overeenkomen met de voorwaartse beweging tijdens de vlucht - ongeacht de oriëntatie van de camera.
ANAFI Ai vertrouwt op een unieke technische oplossing gebaseerd op twee mechanische cardanische ophangingen om de oriëntatie van de hoofdcamera en het sensorsysteem te scheiden:
- De hoofdcamera is gemonteerd op een 3- axis gimbal, waardoor het 3D-oriëntatie onafhankelijk is van de oriëntatie van de drone.
- Het detectiesysteem is gemonteerd op een cardanische ophanging met één as - verbonden met de gierbeweging van de drone, het kan in elke richting worden georiënteerd.
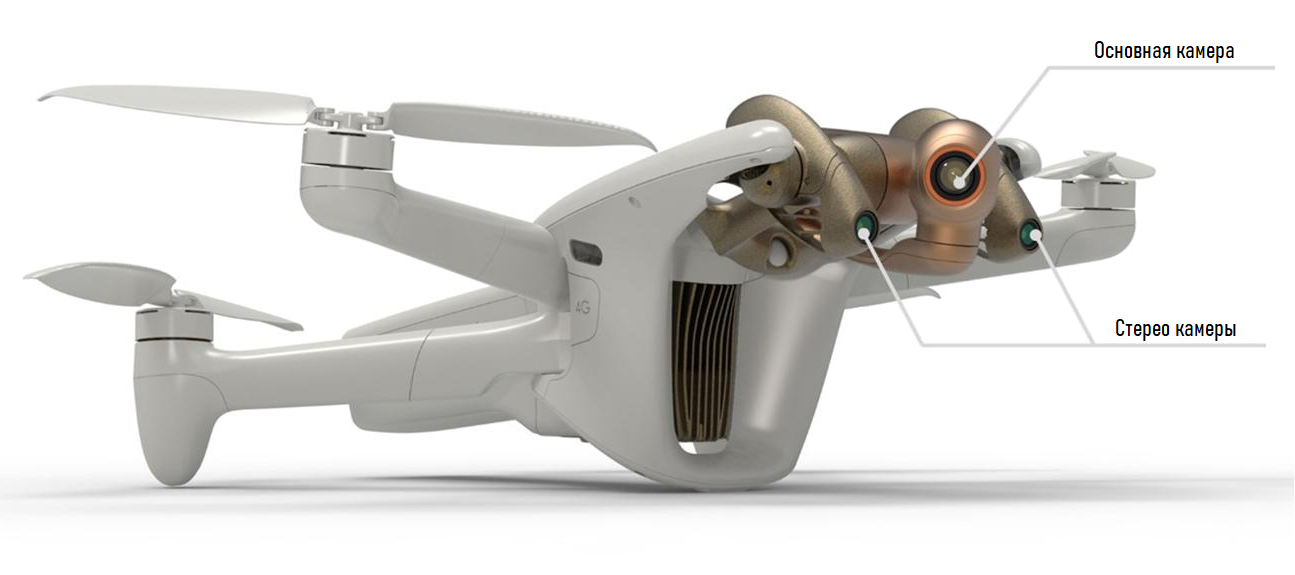 ANAFI Ai dubbele stabilisator voor waarneming en visualisatie.
ANAFI Ai dubbele stabilisator voor waarneming en visualisatie.
De kantelassen van de twee hangers zijn collineair en gecombineerd om een ultracompact ontwerp te bereiken.
Dankzij deze oplossing is het mogelijk om de hoofdcamera en het sensorsysteem in twee verschillende richtingen te richten. Dit ontwerp vermijdt het gebruik van dure camera's aan de zijkanten, bovenkant, onderkant en achterkant van de drone, terwijl het toch een groot beschikbaar gezichtsveld biedt voor het sensorsysteem.
Dit gedeelte is als volgt georganiseerd:
- Details van de sensoren die worden gebruikt voor het sensorsysteem
- Specificaties voor zowel de gimbal van de hoofdcamera als de gimbal van het sensorsysteem
- Strategieën voor het richten van het sensorsysteem om het potentieel van de dubbele ophangingsstructuur te benutten
Sensoren
Het sensorsysteem is gebaseerd op een paar van identieke camera's met één pitch-as...
 1-assig mechanisch scharnier voor ANAFI Ai-detectiesysteem.
1-assig mechanisch scharnier voor ANAFI Ai-detectiesysteem.
Sensorspecificaties zijn als volgt:
- Model: Onsemi AR0144CSSM28SUD20
- Kleur: Monochroom
- Resolutie: 1280 × 800 pixels
- Framesnelheid: 30 fps
- Global shutter
- Volledig horizontaal gezichtsveld: 118 ° (110 ° bruikbaar voor detectie)
- Volledig verticaal gezichtsveld: 72 ° (62 ° bruikbaar voor detectie)
- Brandpuntsafstand: 1,47 mm (0,039 inch - 492,94610 pixels)
- Diafragma: f / 2,7
Specificaties De stereoparen zijn als volgt:
- Common Pitch Axis
- Basislijn/afstand: 62 mm (2,44 inch)
- Synchrone opname met 30 fps

Dual Gimbal
De mechanische gimbal van de hoofdcamera is een 3-assige mechanische pitch-rol l-yaw" met de volgende kenmerken:
- Pitch Limiters: -116° / 176°
- Roll Limiters: / - 36°
- Yaw Limiters: / - 48°
De mechanische ophanging van het sensorsysteem is een eenassige ophanging met de volgende kenmerken:
- Eindaanslagen in steek: -107° / 204°
- Reistijd van de ene eindstop naar de andere: 300 ms
Het detectiesysteem heeft een verplaatsing van 311 ° (waarvan 296 ° niet wordt gemaskeerd door het lichaam van de drone), waardoor achteruit perceptie.
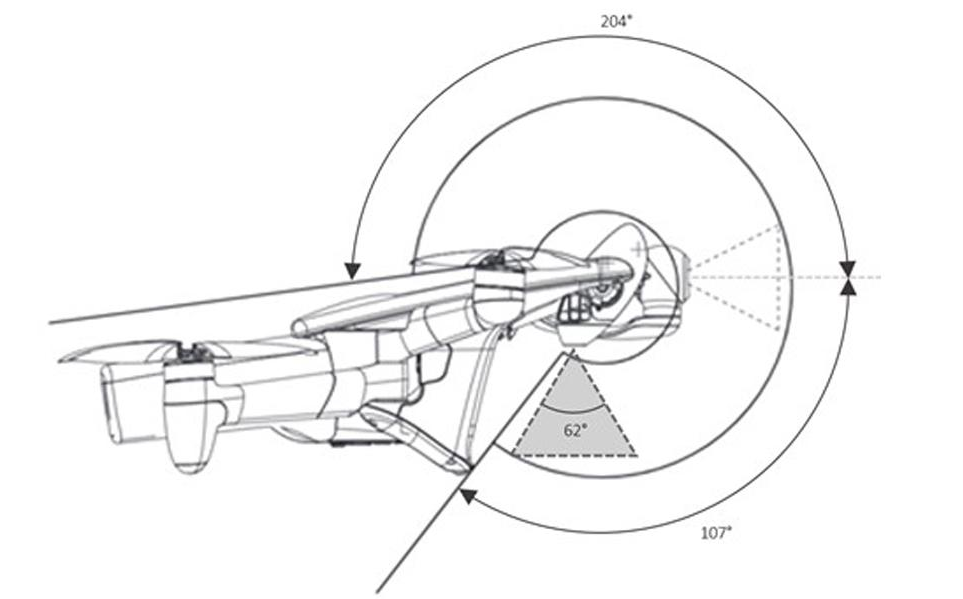
Onmiddellijk verticaal gezichtsveld en beperkende waarnemingssystemen ANAFI Ai.
Het systeem is zo ontworpen dat:
- De propellerbladen komen niet in het gezichtsveld van de hoofdcamera
- De hoofdcamera camera dekt niet het gezichtsveld van het waarnemingssysteem
- De hoofdcamera en het sensorsysteem kunnen volledig worden ingeklapt om de lenzen
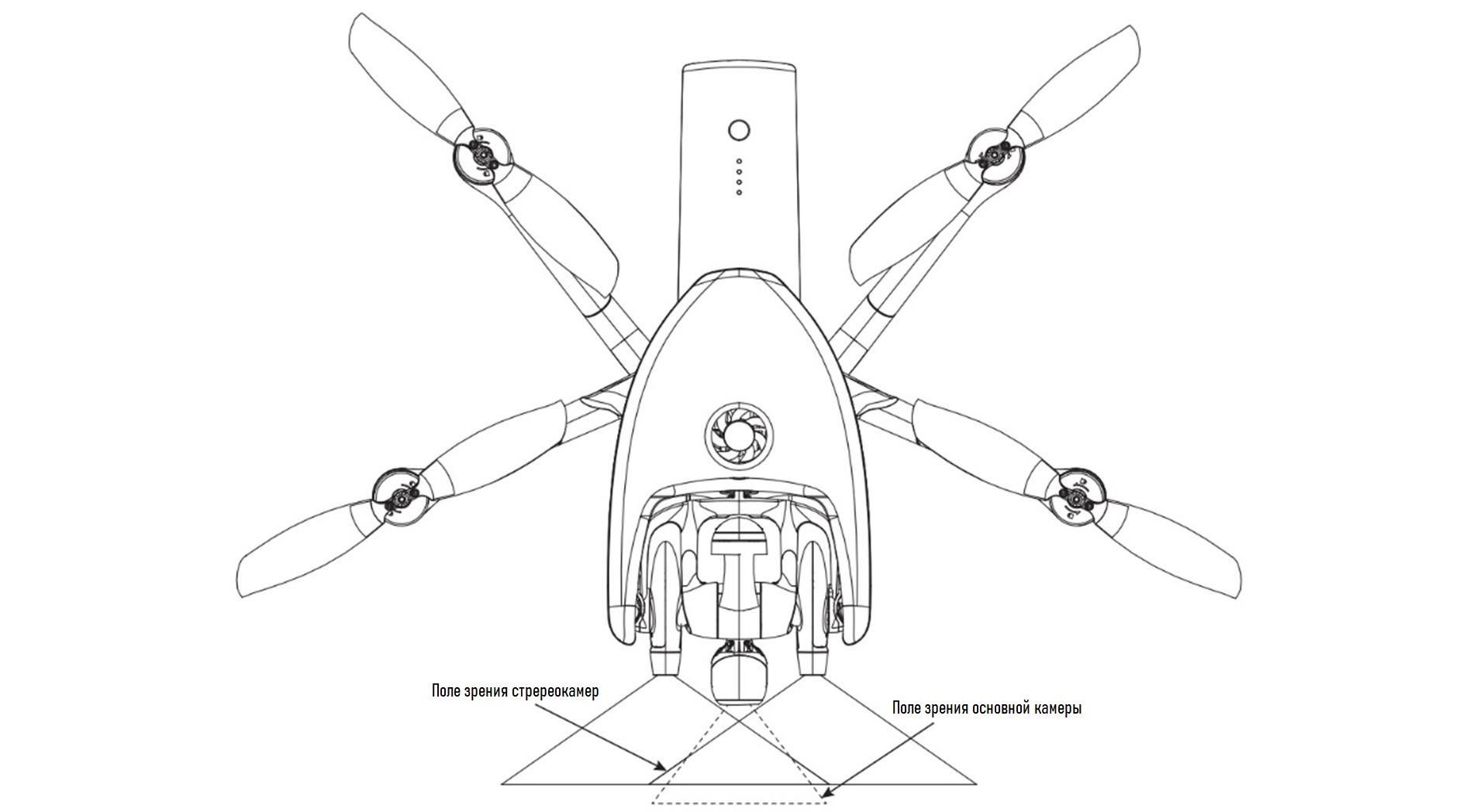 Het horizontale gezichtsveld van het ANAFI Ai-waarnemingssysteem.
Het horizontale gezichtsveld van het ANAFI Ai-waarnemingssysteem.
Bij het achterover leunen beweegt het waarnemingssysteem naar de bovenste positie, waardoor een helder zicht ontstaat.
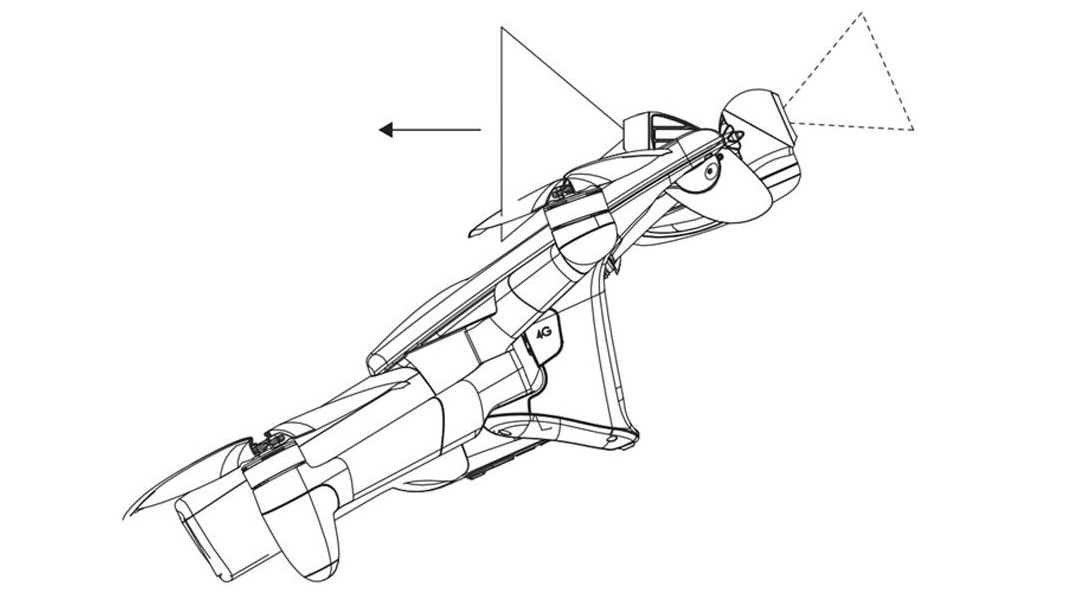
Perceptie van ANAFI Ai in volledig achterover liggende positie voor achterwaartse vlucht.
Reconstructie van de omgeving
Reconstructie van de omringende driedimensionale omgeving voor autonoom vliegen wordt in twee fasen uitgevoerd:
- Diepte-informatie uit waarneming halen in de vorm van dieptekaarten
- Dieptekaartgegevens combineren in een driedimensionaal raster van vulling
Er worden twee methoden gebruikt om dieptekaarten van waarnemingssensoren te verkrijgen:
- Diepte op basis van stereo-uitlijning
- Diepte van beweging
Diepte van stereocorrespondentie
De belangrijkste methode om diepte te extraheren informatie is gebaseerd op parallax tussen twee stereocamera's van het sensorsysteem. Door de omgeving in één richting te fotograferen, maar vanuit twee verschillende posities, verschijnen objecten in het gezichtsveld van het waarnemingssysteem in verschillende posities in de beelden die door twee camera's worden verkregen. Hoe dichterbij het onderwerp, hoe groter het verschil in positie.
De strategie is dus om de punten in de beelden die zijn verkregen door de linker en rechter stereocamera's te bepalen die overeenkomen met hetzelfde object in het gezichtsveld van het waarnemingssysteem, en het verschil in de positie van deze te meten punten in de twee afbeeldingen. Dit verschil wordt dispariteit genoemd en wordt gemeten in het aantal pixels.
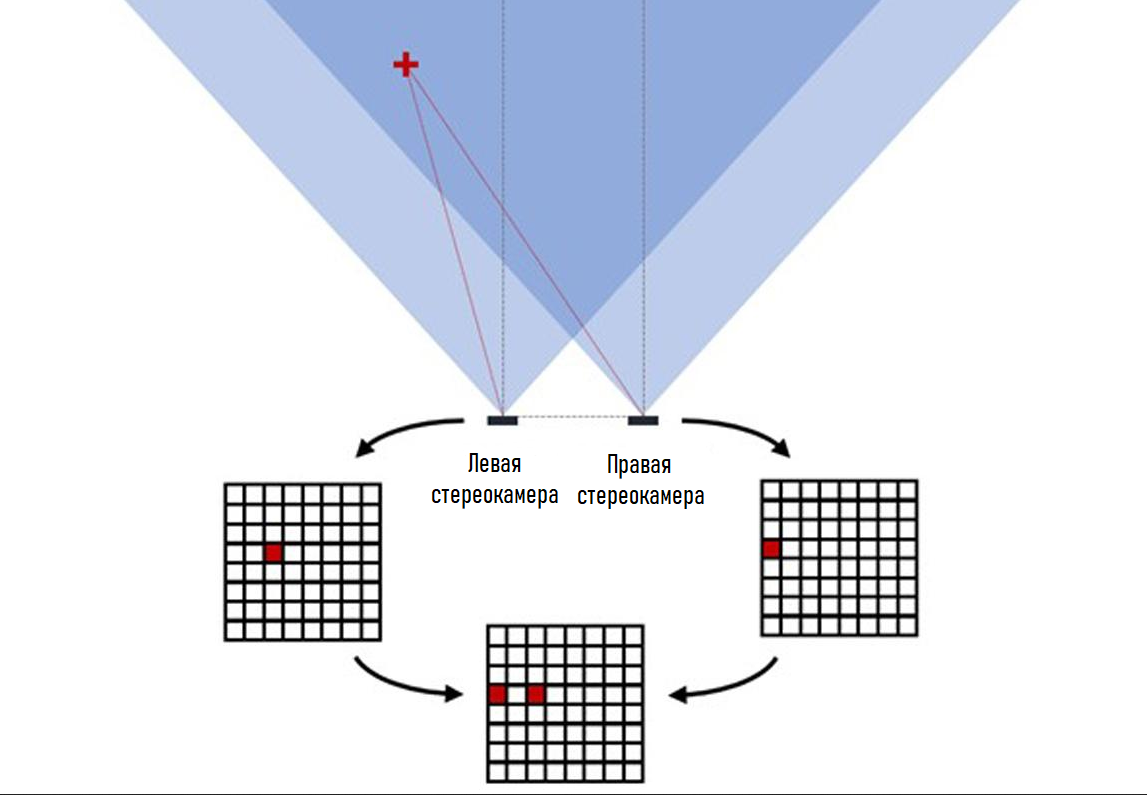 Illustratie van het principe van stereovisie - het rode 3D-punt bevindt zich in verschillende posities op de linker- en rechterafbeelding.
Illustratie van het principe van stereovisie - het rode 3D-punt bevindt zich in verschillende posities op de linker- en rechterafbeelding.
Het verschil kan dan worden gerelateerd aan de diepte van elk van deze punten met behulp van de volgende relatie diepte = brandpunt * basislijn / ongelijkheid, waarbij de diepte en basislijn in dezelfde eenheden worden uitgedrukt, en het brandpunt lengte en ongelijkheid worden uitgedrukt in het aantal pixels.
Het resultaat van de berekening heeft de vorm van een dieptekaart van 176 × 90 pixels, waarbij de waarde van elke pixel overeenkomt met de diepte in meters. De dieptekaart wordt ververst op 30 Hz.
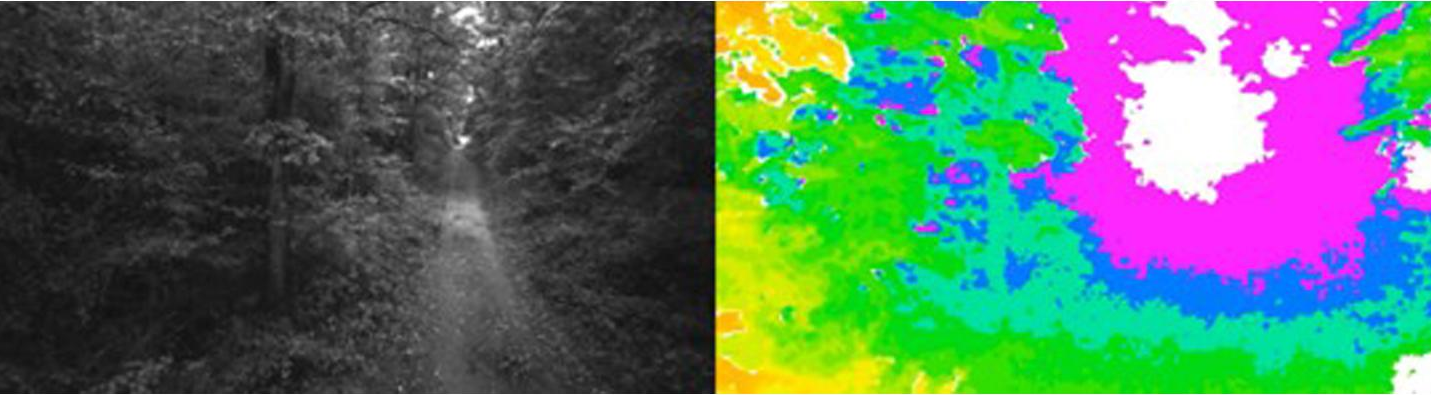
Een voorbeeld van een beeld vastgelegd door de rechtercamera van het ANAFI Ai-detectiesysteem (links) en de bijbehorende diepte verkregen met stereobeeld (rechts). De kleurenkaart gaat van rood (Dichter) naar paars (Verder) - wit betekent Buiten bereik.
Het directe resultaat hiervan is dat de diepte gemeten met deze methode gediscretiseerd is, aangezien de dispariteit alleen discrete waarden (aantal pixels) kan aannemen. Een 3D-punt dat ver genoeg van het waarnemingssysteem ligt en een theoretische ongelijkheid van minder dan één pixel creëert, wordt als oneindig beschouwd, aangezien de overeenkomstige werkelijke discrete ongelijkheid gelijk zal zijn aan 0. De nauwkeurigheid van de stereovergelijkingsmethode neemt af met toenemende afstand, hoewel er zijn methoden die dit fenomeen kunnen verminderen door subpixelsampling te bereiken.
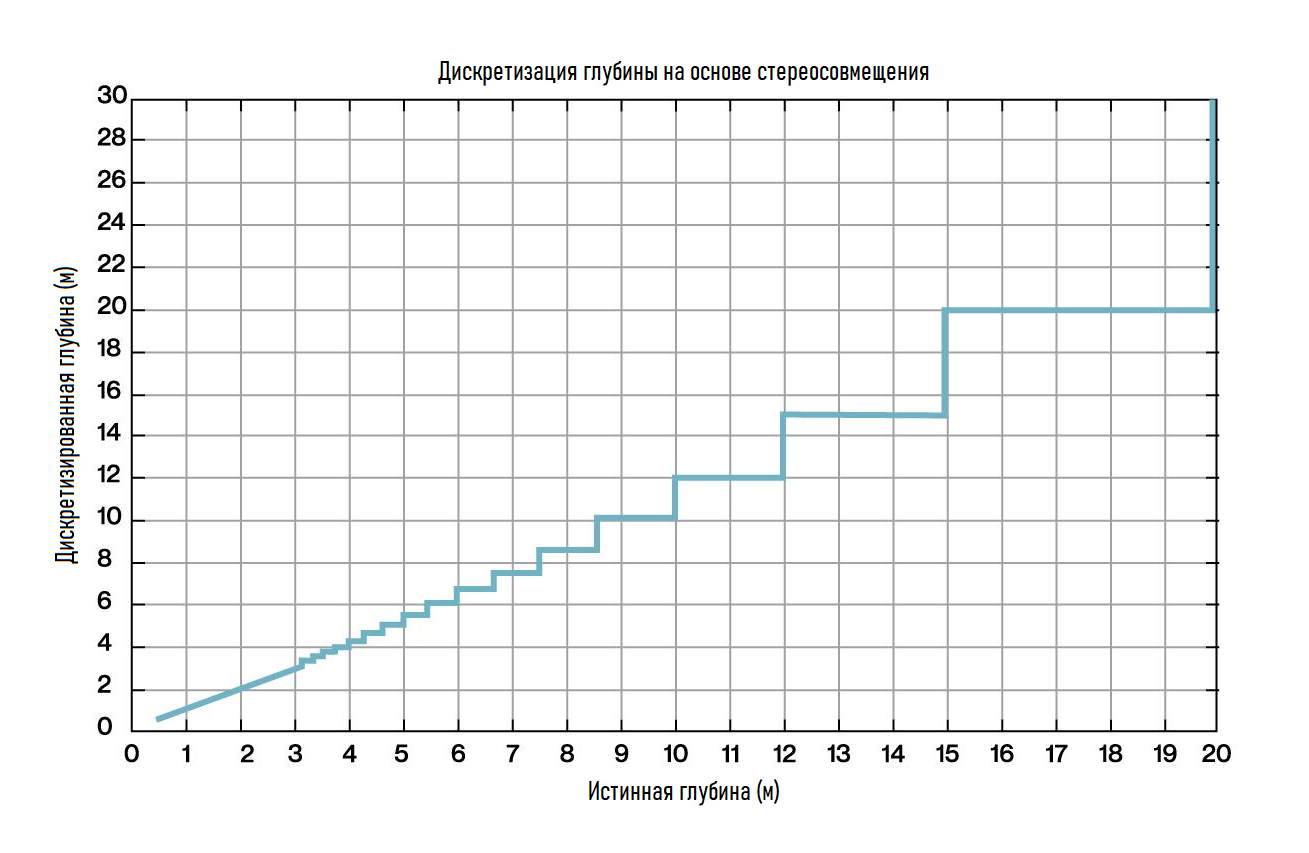 Gediscretiseerde diepte zoals gemeten door "stereo-uitlijning" versus "echte diepte".
Gediscretiseerde diepte zoals gemeten door "stereo-uitlijning" versus "echte diepte".
Bovendien divergeert de ongelijkheid naarmate de diepte nul nadert. Omdat het aantal pixels in afbeeldingen beperkt is, is ook de dispariteitswaarde beperkt. Als gevolg hiervan is er een minimale diepte waarop het perceptuele systeem blind is. Deze minimale diepte is 36 cm voor ANAFI Ai.
Over kalibratie: Elk paar stereocamera's is in de fabriek gekalibreerd om nauwkeurig kleine verschillen tussen de twee camera's te meten en deze te compenseren in ingebouwde diepteberekeningen.
De gebruiker kan ook een paar stereocamera's opnieuw kalibreren met behulp van het testpatroon dat bij de drone is geleverd. In het bijzonder kan de drone tot op zekere hoogte mogelijke kalibratiefouten detecteren die zich tijdens zijn levensduur kunnen voordoen. In dit geval zal de vliegtuigsoftware proberen deze aan te passen en te compenseren, en als dit niet lukt, verschijnt er een melding waarin u wordt gevraagd om opnieuw te kalibreren.
Diepte van beweging
De beweging van de drone kan ook worden gebruikt om beelden van de omgeving vanuit verschillende hoeken te verzamelen en zo diepte-informatie te reconstrueren. Deze techniek wordt bewegingsdiepte of monoculaire waarneming genoemd, omdat een enkele bewegende camera voldoende is om diepte-informatie te verzamelen.
Het werkingsprincipe is vergelijkbaar met stereovisie, maar in plaats van beelden van de omgeving die tegelijkertijd door verschillende waarnemers zijn verkregen, te vergelijken, vergelijkt waarneming beelden van de omgeving die door dezelfde waarnemer op verschillende tijdstippen zijn verkregen. Als de drone beweegt, worden de beelden van deze unieke waarnemer vanuit verschillende hoeken vastgelegd. Als u weet in welke positie elk frame is genomen, is het mogelijk om punten die overeenkomen met hetzelfde kenmerk in verschillende afbeeldingen te trianguleren en terug te brengen naar 3D.
De output is een driedimensionale puntenwolk met maximaal 500 punten voor ANAFI Ai, gegenereerd met een frequentie van 10 Hz.
 Een voorbeeld van een puntenwolk die is gemaakt op basis van diepte van beweging - de kleurenkaart gaat van rood (dichterbij) naar paars (verder).
Een voorbeeld van een puntenwolk die is gemaakt op basis van diepte van beweging - de kleurenkaart gaat van rood (dichterbij) naar paars (verder).
Het ANAFI Ai Motion Depth-algoritme genereert doorgaans minder informatie (dunne puntenwolk) dan het stereo-matchingalgoritme en vereist dat de drone beweegt om informatie te verzamelen. Bovendien kan dit algoritme geen informatie in de exacte bewegingsrichting extraheren (tenminste voor live-uitzendingen), omdat objecten in de beelden in deze richting bijna stationair lijken (expansiefocus).
Het heeft echter een beter detectiebereik (theoretisch oneindig bereik) dan stereo-matching.
Fill Grid
Diepte-informatie van stereo- en monoculaire detectiealgoritmen is geïntegreerd in het Fill Grid. Deze mesh bemonstert de 3D-omgeving in 3D-kubussen die voxels worden genoemd. Elke voxel krijgt de kans toegewezen om bezet te zijn door een obstakel of, omgekeerd, vrij te zijn van een obstakel.
Een straaltransmissie-algoritme wordt gebruikt om diepte-informatie in een vulraster te integreren. Voor elke pixel van de dieptekaart die is verkregen als resultaat van stereovergelijking, wordt deze omgezet in een driedimensionaal punt en voor elk punt van de puntenwolk - in de diepte die wordt verkregen als resultaat van beweging:
- Een straal wordt in het vulrooster getrokken van de positie van het waarnemingssysteem naar de positie van het 3D-punt.
- De kans dat een voxel met een 3D-punt bezet is, wordt vergroot.
- De kans dat alle voxels die worden doorkruist door een andere straal dan de straal die het 3D-punt bevat, bezet zijn, wordt verkleind.
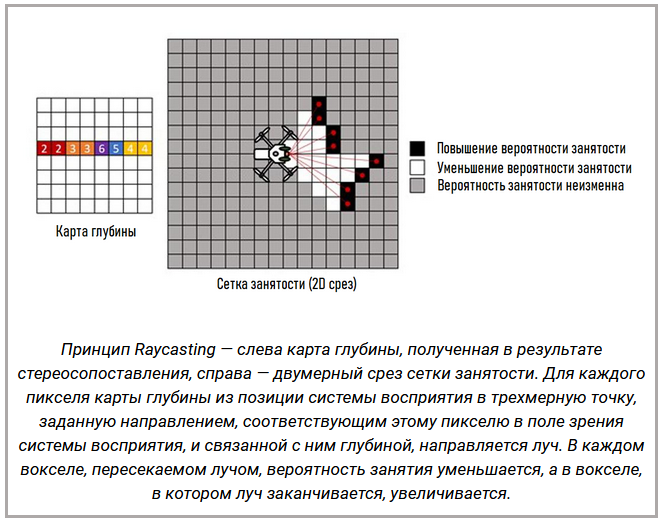
Het raster fungeert dus als een tijdfilter voor diepte-informatie, het absorbeert eventuele ruis in de dieptemeting en als een geheugen van eerdere metingen, waardoor u kunt navigeren in moeilijke omgevingen, zelfs bij afwezigheid van een continu 360 ° gezichtsveld van het waarnemingssysteem.
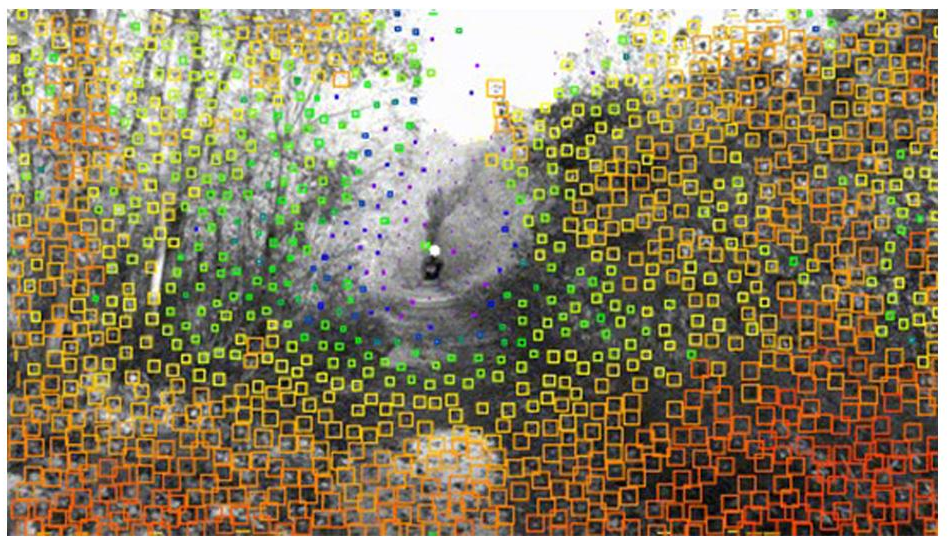
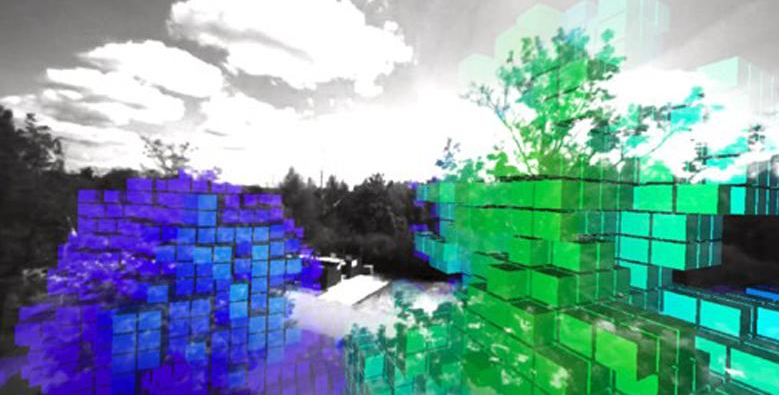 Een voorbeeld van een vulraster. Voxels worden gesuperponeerd op het rechter stereocamerabeeld met een hoge mate van zekerheid dat ze bezig zijn, variërend van rood (Near) tot paars (Far).
Een voorbeeld van een vulraster. Voxels worden gesuperponeerd op het rechter stereocamerabeeld met een hoge mate van zekerheid dat ze bezig zijn, variërend van rood (Near) tot paars (Far).
Het infill-raster is de basis voor de bewegingsplanningsalgoritmen die door ANAFI Ai worden gebruikt voor autonome vluchten en het vermijden van obstakels.
Obstakel vermijden
Dankzij de kennis van de 3D-omgeving van de drone die is opgeslagen in het infill-raster, kan ANAFI Ai obstakels vermijden. Dit biedt aanzienlijke extra veiligheid voor autonome missies, maar is ook handig voor handmatige vluchten, vooral als de zichtlijn tussen de piloot en de drone wordt belemmerd.
Elke 30 ms voorspelt ANAFI Ai wat de nominale korte tijdshorizon in de toekomst zal zijn. Deze voorspelling wordt afgeleid uit de links die door de gebruiker zijn ingediend, of het nu vluchtcommando's zijn van de afstandsbediening, waypoints om aan een vluchtplan te koppelen of een invoertraject. Vervolgens berekent het herplanningsalgoritme, met behulp van het gesimuleerde interne dronemodel, de kleinst mogelijke correcties op dit voorspelde nominale traject dat het botsingsvrij en haalbaar maakt voor de drone.
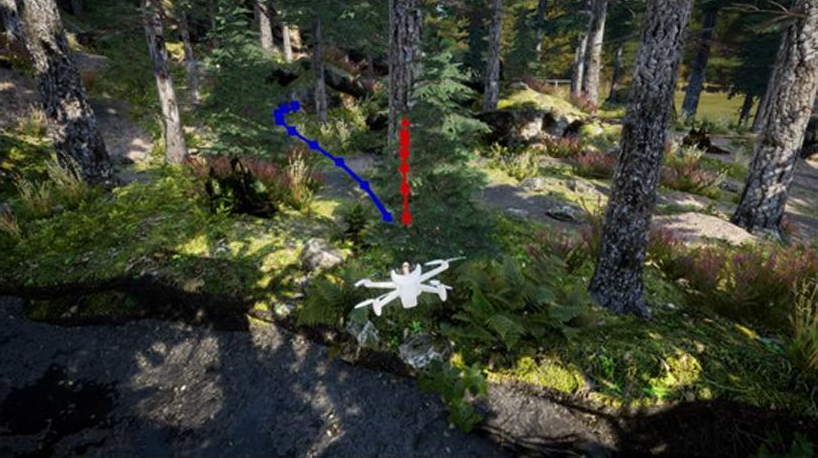 Een voorbeeld van de gecorrigeerde baan berekend door het algoritme voor het vermijden van obstakels in reactie op de botsing van de referentiebaan met een boom.
Een voorbeeld van de gecorrigeerde baan berekend door het algoritme voor het vermijden van obstakels in reactie op de botsing van de referentiebaan met een boom.
Het ANAFI Ai-systeem voor het vermijden van obstakels is ontworpen om te werken bij snelheden tot:
- Vlakke vlucht: 29 km/u
- Klim: 14 km/u
- Daling: 11 km/u
De ontwijkprestaties zijn beperkt bij regen of harde wind, weinig licht of verstoorde satellietnavigatie. Bovendien moet u, voordat u gaat vliegen, ervoor zorgen dat de lenzen van het sensorsysteem schoon zijn.
Vluchtmissies

Belangrijkste kenmerken [1424)
Lucht SDK (zie. SDK-sectie) geeft ontwikkelaars toegang tot elke drone-sensor, camera, connectiviteitsinterface en zelfstandige functie. Daarom kunnen ze het gedrag van de drone aanpassen om vluchtmissies te creëren. Elke vluchtmissie bevat een reeks basisgedragingen of -modi:
- Op de grond: Gedrag wanneer de motoren worden gestopt, bijv. sensorkalibratie.
- Opstijgen: verschillende startstrategieën
- Zweven: houd een vast punt vast
- Vlucht: handmatig functies en autonome vlucht
- Landing: verschillende landingsstrategieën
- Kritiek: bij detectie van een kritieke toestand
Aangepaste vluchtmissies kunnen nieuw gedrag creëren of ze hergebruiken van de standaardmissie.
Prijs en beschikbaarheid
De start van de verkoop van de ANAFI Ai-drone staat gepland voor september 2021. Prijsinformatie is op dit moment niet bekendgemaakt. We blijven de binnenkomende informatie volgen en zullen deze sectie zeker op een later tijdstip bijwerken.

Documentatie om te downloaden
Documentatie om kennis te maken met het product van de ontwikkelaar:
- Download de volledige technische documentatie van de ontwikkelaar
- Download de productspecificatie van de ontwikkelaar
Video's
Top beoordelingen ANAFI Ai van de ontwikkelaar en gebruikers
Uitpakken en eerste vlucht.
Testvlucht van de drone op afstand met 4G-verbinding. De totale vliegtijd bedroeg 29 minuten bij een gemiddelde horizontale vliegsnelheid van 58 km/u (16 m/s). Gedurende deze tijd kon de drone 27 km afleggen. Je kunt ook merken dat de vlucht werd uitgevoerd in harde wind, die constant werd gewaarschuwd door het drone-systeem.
.






