
- 1 บทนำ
- 2 ผู้พัฒนาเกี่ยวกับเครื่อง
- 3 คุณสมบัติ
- 4 แพ็คเกจ เนื้อหา
- 5 ข้อกำหนด
- 5.1 โดรน
- 5.2 การสื่อสาร
- 5.3 ระบบนำทาง
- 5.4 Skycontroller 4
- 5.5 เครื่องบินอัจฉริยะแบตเตอรี่
- ) 5.6 แอป
- 5.7 กล้อง
- 5.8 โหมดการบินอัตโนมัติ
- 5.9 ความปลอดภัยทางไซเบอร์
- 5.10 Parrot SDK
- 6 ลักษณะที่ปรากฏ
- 7 การสื่อสาร
- 7.1 4G
- 7.2 สูงสุด ช่วงที่มีการเชื่อมต่อ 4G
- 7.3 Wi-Fi
- 7.4 วิดีโอสด
- 8 กล้อง
- 8.1 48MP เมทริกซ์
- 8.2 เลนส์
- 8.3 โหมดวิดีโอ
- 8.4 การเข้ารหัสวิดีโอ
- 8.5 HDR
- 8.6 โหมดภาพถ่าย
- 9 การรักษาเสถียรภาพแบบไฮบริด
- 9.1 gimbal กล้องหลัก
- 10 Photogrammetry
- 10.1 การตรวจสอบและการทำแผนที่
- 10.2 ความสามารถของ AI และ 4G
- 10.3 การบินอัตโนมัติ
- 11 Photogrammetry หรือ lidar
- 11.1 Photogrammetry pros
- 11.2 ข้อเสีย LIDAR
- 12 SDK
- 12.1 Air SDK
- 12.2 Ground SDK
- 12.3 OpenFlight
- 12.4 สฟิงซ์
- 12.5 โอลิมปิก
- 12.6 PdrAW
- 12.7 รุ่น C. A. D.
- 12.8 MAVLink และความเข้ากันได้ของ GUTMA
- 13 ระบบนิเวศพันธมิตรที่ใหญ่ที่สุดสำหรับโดรนนกแก้ว
- 13.1 Parrot สำหรับความต้องการทางธุรกิจใดๆ
- 14 ความปลอดภัยทางไซเบอร์
- 14.1 ความเป็นส่วนตัวของข้อมูล
- 14.2 เป็นไปตามมาตรฐาน FIPS140 -2 และรับรองโดย CC EAL5 Secure Element
- 14.3 4G Secure Connection and Strong Authentication
- 14.4 Secure Initialization and Upgrade
- 14.5 การตั้งค่าคีย์ผู้ใช้บนองค์ประกอบความปลอดภัย
- 14.6 ภาพถ่ายที่ลงนามแบบดิจิทัล
- 14.7 ความโปร่งใสและการตรวจสอบความปลอดภัยอย่างต่อเนื่องพร้อมค่าหัวบั๊ก
- 15 การจัดการข้อมูล
- 15.1 ข้อมูลที่รวบรวม
- 15.2 การใช้ข้อมูลที่รวบรวมครั้งสุดท้าย [1 26]
- 15.3 การปรับปรุงปัญญาประดิษฐ์ (AI)
- 16 ลักษณะการบิน
- 16.1 ลักษณะอากาศพลศาสตร์
- 16.2 แอคทูเอเตอร์และแอโรไดนามิกส์
- 16.3 เซ็นเซอร์
- 16.4 ลักษณะเซ็นเซอร์
- 16.5 Autopilot
- 17 เที่ยวบินอัตโนมัติ
- 17.1 คุณสมบัติหลัก
- 17.2 กลยุทธ์ระบบการรับรู้
- 17.3 เซ็นเซอร์
- 17.4 ระบบกันสะเทือนแบบคู่
- 17.5 การสร้างสภาพแวดล้อมขึ้นใหม่
- 18 ภารกิจการบิน
- 18.1 คุณสมบัติหลัก
- 19 ราคาและห้องว่าง
- 20 ดาวน์โหลดเอกสาร
- 21 วิดีโอ
บทนำ [16 4]
Parrot Anafi Ai เป็นโซลูชันใหม่ที่ไม่เหมือนใครจาก นักพัฒนาชาวฝรั่งเศสที่มีชื่อเสียงการใช้งานเชิงพาณิชย์เป็นหลัก
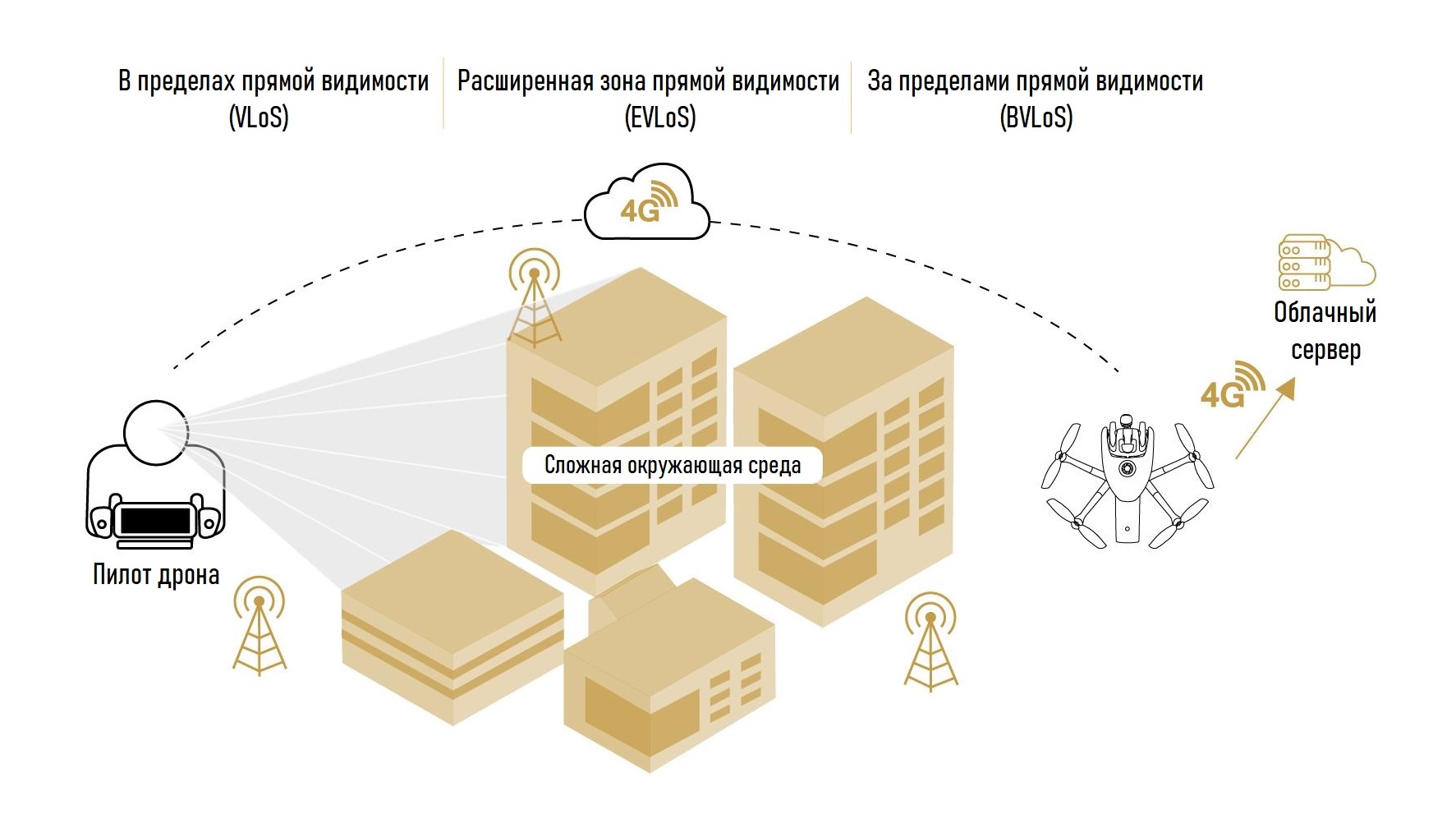
บัตรโทรศัพท์ของ Anafi Ai เป็นโมดูล 4G ในตัวซึ่งต้องขอบคุณโดรนที่สามารถใช้การสื่อสารเคลื่อนที่รุ่นที่สี่เป็นช่องทางการรับส่งข้อมูลหลักระหว่างโดรนและอุปกรณ์ควบคุมซึ่งอันที่จริง ลบข้อ จำกัด ทั้งหมดเกี่ยวกับช่วงการบินและกำหนดการทำงานของ UAV ไว้นอกแนวสายตาเมื่อมองไปข้างหน้า เราสังเกตว่าศักยภาพที่ประกาศไว้ของเครื่องจักรนั้นทรงพลังอย่างเหลือเชื่อและสอดคล้องกับรูปลักษณ์แห่งอนาคตมากกว่าที่เคย ซึ่งได้รับแรงบันดาลใจจากธรรมชาติในการสร้างวิศวกรชาวฝรั่งเศส
ผู้พัฒนาเกี่ยวกับรถยนต์
Martin Liné ผู้อำนวยการฝ่ายการตลาด ที่ Parrotโดรน Parrot

คุณสมบัติ
คุณสมบัติหลักของ Parrot Anafi Ai:
- น้ำหนัก 898 กรัม
- เวลาบิน 60 วินาที
- การออกแบบพับเก็บได้แบบพกพาที่ไม่เหมือนใคร
- โมดูลการสื่อสาร 4G ในตัวสำหรับการโต้ตอบกับโดรน / อุปกรณ์ควบคุมเต็มรูปแบบโดยไม่มีข้อ จำกัด ในทุกสภาพแวดล้อม
- เข้ากันได้กับ LTE ทั่วโลก
- ติดตั้งระบบส่งสัญญาณรอบทิศทาง (เสาอากาศ 4 ทิศทางพร้อมตัวสะท้อนแสง (พร้อมเสาอากาศขยาย 2.5 dBi / s) โดรนจะกำหนดคู่ของเสาอากาศที่ดีที่สุดขึ้นอยู่กับทิศทางและตำแหน่งที่สัมพันธ์กับ ตำแหน่งของนักบิน)
- ติดตั้งระบบภาพรอบทิศทางที่ไม่เหมือนใครของโลกรอบข้างที่สร้างขึ้นจากกล้องสเตอริโอคู่ที่ติดตั้งบน gimbal เฉพาะที่มีช่วงแพน 330 องศา (จาก -120 °ถึง 210 °) ทำงานควบคู่กับระบบเพิ่มประสิทธิภาพอัจฉริยะ เส้นทางการบิน
- ดัดแปลงสำหรับเที่ยวบินในร่ม
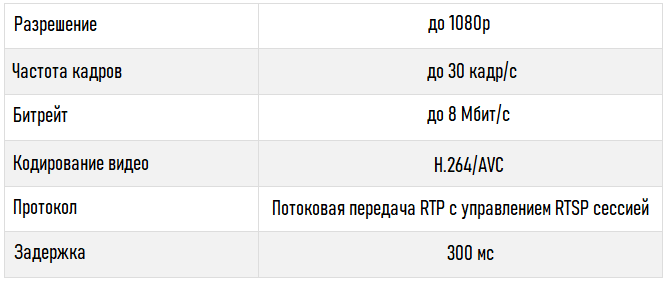
- สตรีมวิดีโอสดใน 1080p พร้อมเวลาแฝงต่ำ (300 m / s) โดยไม่มีข้อ จำกัด ด้านช่วงที่ใดก็ได้ในโลกด้วยบิตเรตวิดีโอ 12 Mbps
- ความสามารถในการถ่ายโอนไฟล์ไปยังที่เก็บข้อมูลบนคลาวด์โดยตรงในเที่ยวบิน
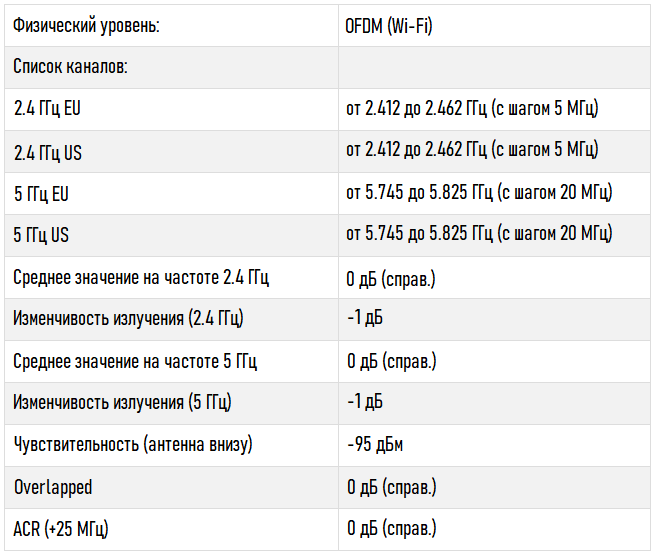
- โมดูลการสื่อสาร Wi-Fi ในตัว (Wi-Fi 802.11a / b / g / n) สำหรับการควบคุมการโต้ตอบของอุปกรณ์โดรน / อุปกรณ์ (เช่น ตัวเลือกการเชื่อมต่อทางเลือก)
- สเลฟ ช่วงความถี่ Wi-Fi: 2.4GHz / 5.8GHz
- สูงสุด ระยะการบิน FPV ผ่าน Wi-Fi: 9 กม. (192]
- โหมดการทำงานอัตโนมัติเฉพาะของโมดูล 4G / Wi-Fi ซึ่งช่วยให้สามารถสลับจากเทคโนโลยีการสื่อสารหนึ่งไปยังอีกเทคโนโลยีหนึ่งได้อย่างราบรื่นโดยไม่สูญเสียข้อมูล
- ระดับการป้องกันเสียงพึมพำ IPX3
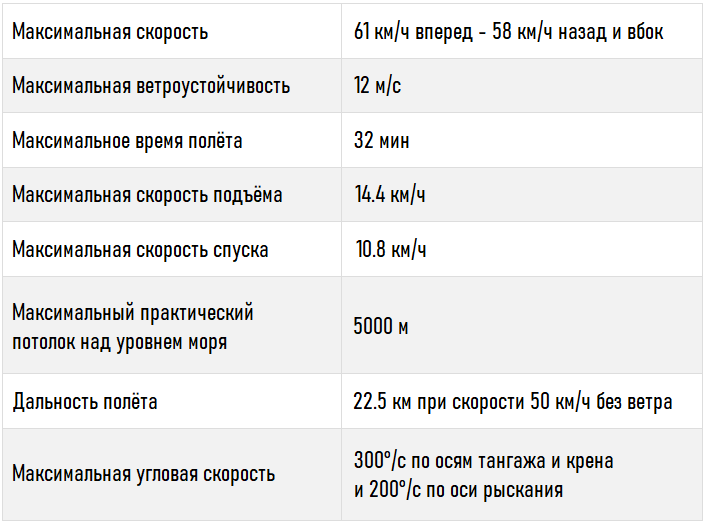
- สูงสุด เวลาบิน 32 นาที
- สูงสุด ความเร็วในการบินในแนวนอน 61 กม. / ชม.
- แม็กซ์ ความต้านทานลม: 13 m / s
- แม็กซ์เพดานเหนือระดับน้ำทะเล 5,000 ม.
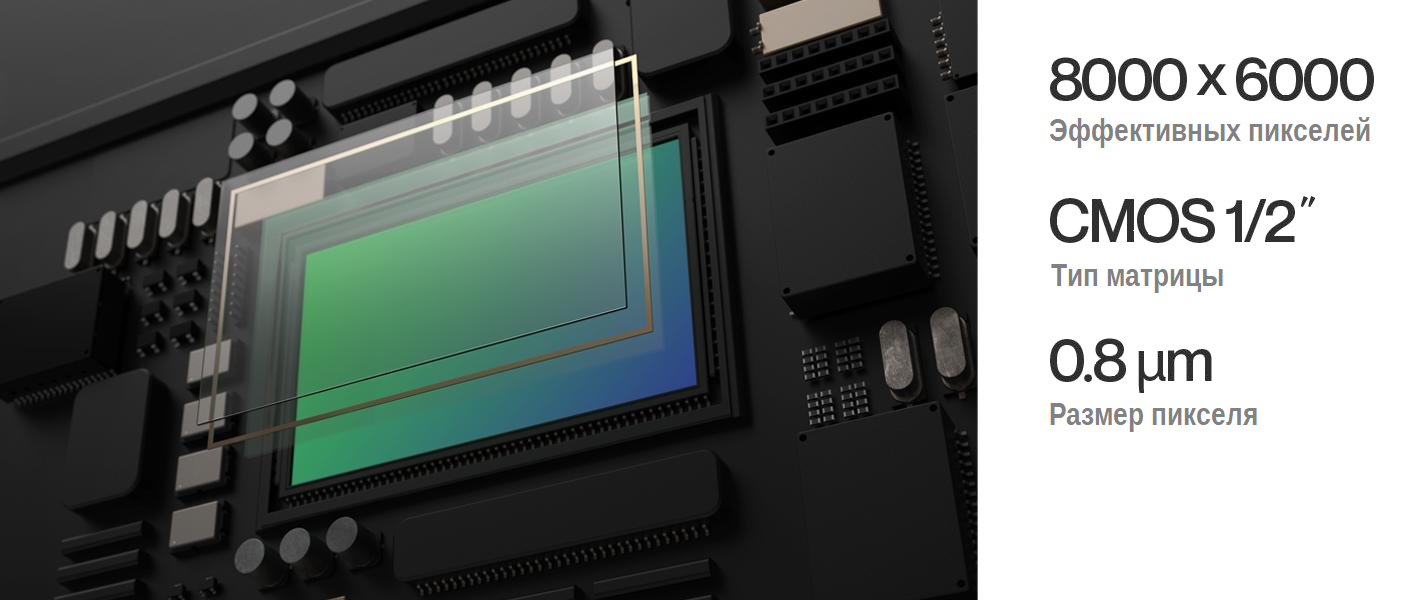
- กล้อง 4K 48MP ที่สร้างขึ้นบนเมทริกซ์ CMOS ขนาด 1/2 นิ้วที่มีขนาดพิกเซล 0.8 μm; พร้อมอาร์เรย์ฟิลเตอร์สี Bayer ในตัว
- เลนส์ LD-ASPH แบบออปติคัล (200]
- ระบบป้องกันภาพสั่นไหวแบบไฮบริด 6 แกน (EIS แบบกลไก 3 แกนแบบกลไก 3 แกน) (201]
- สามารถควบคุมได้ ช่วงการทำงาน Gimbal -90 ° ถึง 90 °
- 6x Lossless Digital Zoom (2x 4K / 4x FHD)
- สูงสุด อัตราบิตของวิดีโอ 200 Mbps
- รูปแบบการบันทึกวิดีโอ HDR8 / HDR10
- สูงสุด ช่วงไดนามิก 14EV
- โปรไฟล์สี P-log สำหรับการประมวลผลภายหลัง
- โหมดการบินและถ่ายภาพอัตโนมัติ 5 × (Photogrammetry / แผนการบิน / ตากล้อง / Smart RTH / ยานพาหนะ) (208]
- ช่องเสียบในตัวสำหรับ MicroSD และซิมการ์ด
- เข้ากันได้กับ PIX4D Suite
- โหมดการบิน Photogrammetric มีให้เลือกใช้ในกลุ่ม แอป FreeFlight 7 และซอฟต์แวร์ OpenFlight
- การสร้างแผนการบินด้วยคลิกเดียว
- ระบบวิเคราะห์ภาพถ่ายขนาด 48MP 1 fps: เร็วกว่าคู่แข่งสองเท่า
- ความแม่นยำในการถ่ายภาพ: 0.46 ซม. / พิกเซลGSD ที่ 30m
- รองรับ Parrot SDK (ด้วยความสามารถในการฝังโค้ดของคุณลงในโดรนโดยใช้ Air SDK, สร้างแอปพลิเคชันมือถือโดยใช้ Ground SDK, กำหนดค่าสถานีภาคพื้นดินโอเพ่นซอร์สโดยใช้ OpenFlight, โต้ตอบกับ Sphinx ที่ทันสมัย เครื่องมือจำลองเสียงพึมพำเช่นเดียวกับการเขียนสคริปต์ Python ด้วย Olympe และการประมวลผลวิดีโอและข้อมูลเมตาด้วย PdrAW)
- เข้ากันได้กับซอฟต์แวร์บุคคลที่สาม: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- ANAFI Ai สอดคล้องกับ General ข้อบังคับ European Union Data Protection Regulation (GDPR)
- ความเป็นส่วนตัวของข้อมูลที่เหนือกว่าด้วยองค์ประกอบการรักษาความปลอดภัย WISeKey ระดับ 3 ของ NIST FIPS140-2 ที่มีมาตรฐานทั่วไป EAL5
- วิดีโอและการควบคุมที่ได้รับการป้องกันด้วย SRTP / DTLS ตาม webRTC
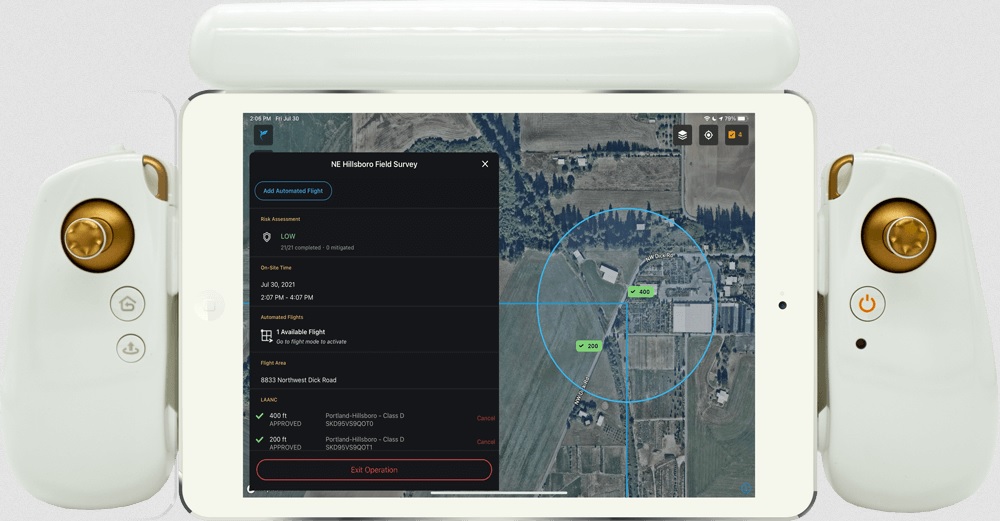
- New Parrot Skyco อุปกรณ์ควบคุมแบบพกพา ntroller 4
- แอปพลิเคชั่นมือถือใหม่ Parrot FreeFlight 7

แพ็คเกจ
ผู้พัฒนาเสนอโดรน ในการกำหนดค่าเดียวซึ่งจะรวมถึง:
- Drone ANAFI Ai
- กรณีขนส่งที่เข้มงวด
- อุปกรณ์ควบคุม Parrot Skycontroller 4
- 1 × Smart แบตเตอรี่
- เครื่องชาร์จ USB-PD
- ชุดใบพัดสำรอง (2CW / 2CCW)
- สายเคเบิล Companion (USB-C เป็น Lightning)
- 2 × Companion Cables (USB -C เป็น USB-C)
- แผนภูมิการปรับเทียบ

ข้อมูลจำเพาะ
เครื่องบิน

การสื่อสาร
ระบบนำทาง
Skycontroller 4

เครื่องบินอัจฉริยะแบตเตอรี่
แอป

กล้อง

โหมดการบินอัตโนมัติ
ความปลอดภัยทางไซเบอร์
Parrot SDK
ต่อไป คุณ สามารถทำความคุ้นเคยกับข้อมูลสำคัญของ Parrot Anafi Ai ซึ่งจะช่วยให้คุณเรียนรู้เพิ่มเติมเกี่ยวกับศักยภาพที่ประกาศไว้ของเครื่องจักร รวมถึงการปรับปรุงที่นำมาใช้เมื่อเปรียบเทียบกับโดรนรุ่นเชิงพาณิชย์ Parrot Anfi Thermal และโดรนอื่นๆ จากแบรนด์ชั้นนำ
ลักษณะที่ปรากฏ





การสื่อสาร
4G
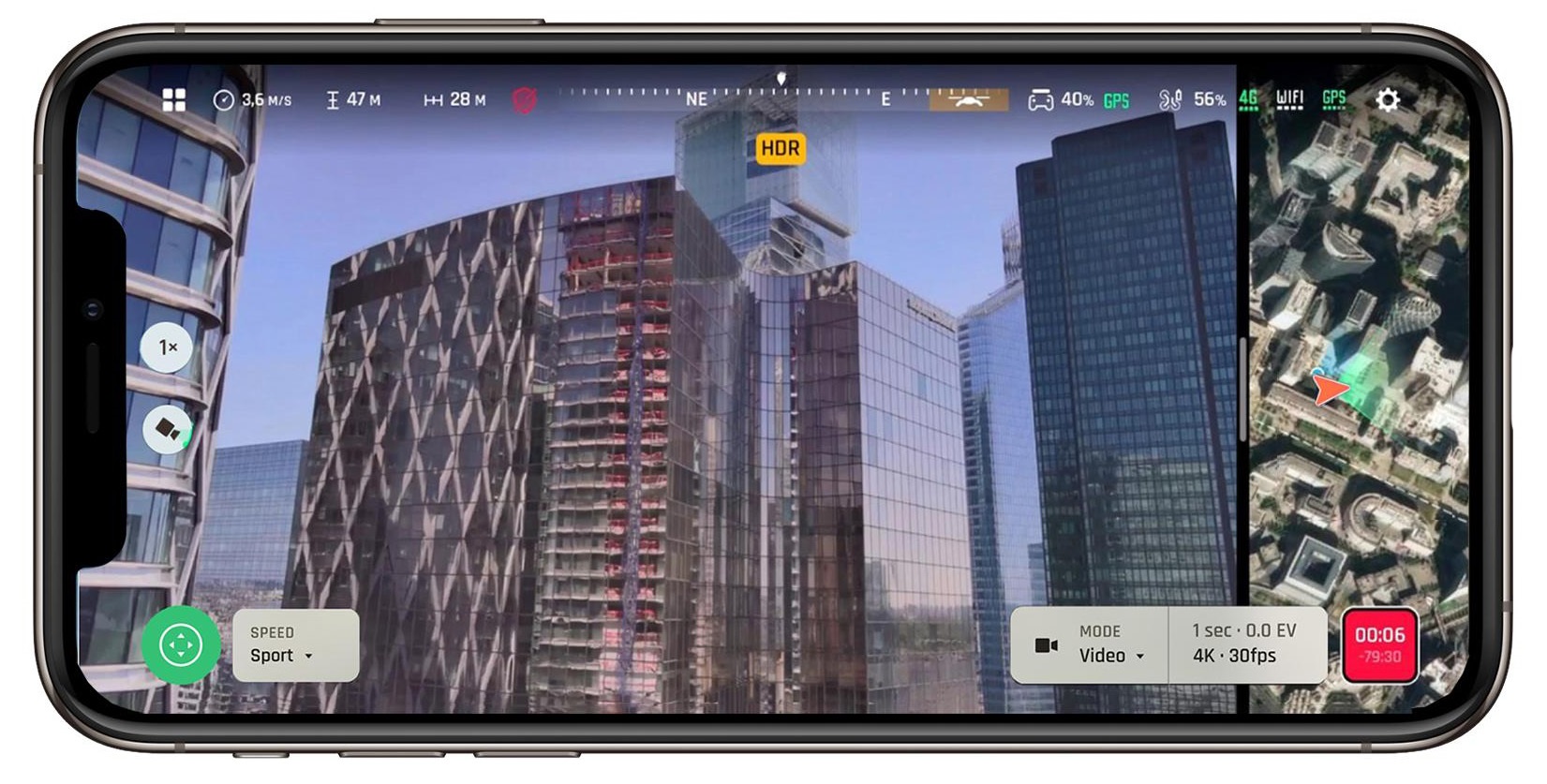
ANAFI Ai รวมถึงโมดูลวิทยุ 4G (นอกเหนือจาก โมดูลวิทยุ Wi-Fi) ซึ่งช่วยให้คุณออกอากาศสตรีมวิดีโอในคุณภาพ 1080p ด้วยบิตเรตสูงสุด 12 Mbps โดยมีเวลาแฝงที่ต่ำมาก (300 ms) โดยไม่จำกัดช่วงและทุกที่ในโลก
ความเข้ากันได้
โมดูล ANAFI Ai 4G รองรับมากกว่า 28 ย่านความถี่ ครอบคลุมมากกว่า 98% ของความถี่ที่ใช้งานทั่วโลก
สวิตช์เครือข่ายอัตโนมัติ
คุณภาพและแบนด์วิดท์ของเครือข่าย 4G และ Wi-Fi จะถูกวัดทุกๆ 100 มิลลิวินาทีเพื่อปรับการสตรีมให้เข้ากับสภาพของเครือข่าย เมื่อรวมกับอัลกอริธึมการกำหนดเส้นทาง การเชื่อมต่อระหว่างโดรนกับตัวควบคุมจะคงอยู่แม้ว่า Wi-Fi จะถูกรบกวนอย่างรุนแรง ดังนั้นเมื่อแบนด์วิดธ์ที่มีประสิทธิภาพ (แบนด์วิดธ์ที่ใช้งานได้) ของ Wi-Fi ต่ำกว่า 1.5 Mbps ระบบจะเปลี่ยนเป็น 4G โดยอัตโนมัติ
เพื่อจำกัดการใช้ข้อมูลมือถือเมื่อนักบินอยู่ในระยะของเครือข่าย Wi-Fi ของโดรน การเปลี่ยนจาก 4G เป็น Wi-Fi จะดำเนินการโดยอัตโนมัติโดยไม่ตัดการสตรีมวิดีโอ
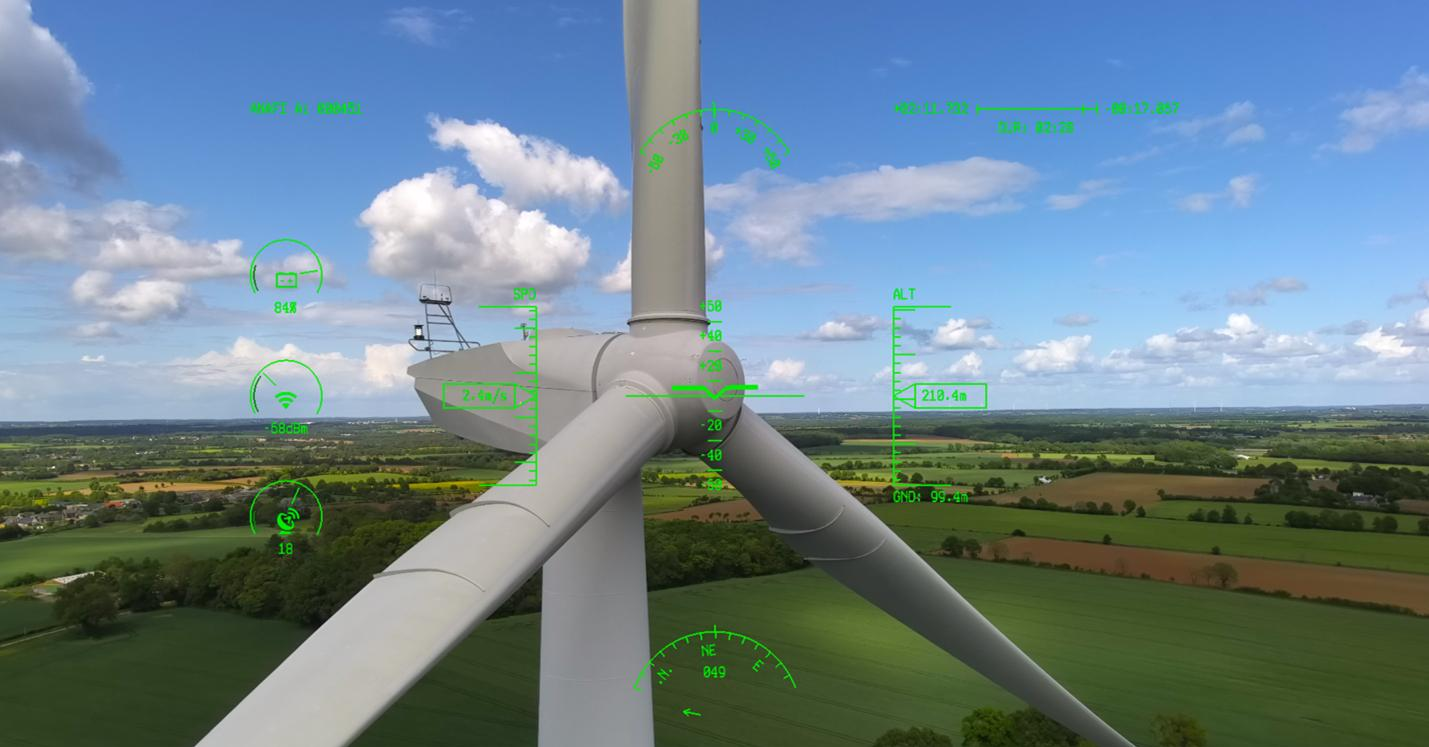
สูงสุด ช่วงที่มีการเชื่อมต่อ 4G
วิดีโอจากนักพัฒนาซอฟต์แวร์แสดงค่าสูงสุด ช่วงการบินของ Anafi Ai พร้อมการเชื่อมต่อ 4G ในทิศทางเดียวในการชาร์จแบตเตอรี่หนึ่งครั้ง เวลาบินทั้งหมดคือ 29 นาทีที่ความเร็วเที่ยวบินแนวนอนเฉลี่ย 58 กม. / ชม. (16 ม. / s) ในช่วงเวลานี้ โดรนสามารถบินได้ 27 กม. นอกจากนี้คุณยังสามารถสังเกตได้ว่าเที่ยวบินดำเนินการในสภาพอากาศที่มีลมแรง ซึ่งระบบโดรนเตือนตลอดเวลา
ใช้อัลกอริธึมการเพิ่มประสิทธิภาพสตรีมวิดีโอ
การควบคุมความแออัดของ 4G
อัลกอริธึมการควบคุมความแออัดช่วยให้:
- วัดการสูญเสียแพ็กเก็ตตลอดวงจรเครือข่ายทั้งหมด
- วัดความล่าช้า (เวลาเดินทางไปกลับ)
- ปรับแบนด์วิดท์ตามพารามิเตอร์ทั้งสองนี้
เป้าหมายสูงสุดของอัลกอริธึมคือการเพิ่มแบนด์วิดท์ที่มีอยู่ให้สูงสุดในขณะที่รักษาเวลาแฝงที่ต่ำที่สุดที่เป็นไปได้ อัลกอริธึมนี้ใช้กับอินเทอร์เฟซแต่ละอันที่มีอยู่ในโดรน แต่ละอันมีพารามิเตอร์ของตัวเอง ปรับให้เหมาะสมตามเครือข่าย ตามข้อมูลที่ได้รับจากอัลกอริธึมนี้ ตัวจัดการลิงก์จะทำการตัดสินใจเกี่ยวกับการกำหนดเส้นทางและอินเทอร์เฟซที่ใช้งานอยู่
การควบคุมโดรนผ่านการเชื่อมต่อ 4G
ANAFI Ai เชื่อมต่อกับรีโมตคอนโทรลผ่าน 4G ในเวลาน้อยกว่า 30 วินาที หากโดรนอยู่นอกช่วงของ Wi-Fi และในเวลาน้อยกว่า 15 วินาที หากโดรนอยู่ภายในช่วง Wi-Fi และการเชื่อมต่อ 4G ยังให้:
- การตรวจจับและการเริ่มต้นการเชื่อมต่อตามโปรโตคอล VOIP SIP
- ใช้เซิร์ฟเวอร์รีเลย์เพื่อสร้างการเชื่อมต่อผ่านเครือข่ายที่ปลอดภัย
ประสิทธิภาพการสตรีมวิดีโอ
- เวลาในการตอบสนอง: 300 ms
- ความปลอดภัย: วิดีโอและการควบคุมได้รับการป้องกันด้วย SRTP / DTLS ตาม webRTC
- เสาอากาศ: 28 แบนด์ LTE จาก 700 MHz ถึง 2.6 GHz

Wi-Fi
ระบบส่งสัญญาณรอบทิศทาง
- ANAFI Ai มี เสาอากาศสะท้อนแสง 4 ทิศทาง (พร้อมอัตราขยายของเสาอากาศ: 2.5 dBi / s) โดรนจะกำหนดคู่ของเสาอากาศที่ดีที่สุดตามการวางแนวและตำแหน่งที่สัมพันธ์กับตำแหน่งของนักบิน
- ด้วยอัตราขยายใหม่ 3.5 / - 1.5 dBi ในระนาบแนวนอนของโดรน ANAFI RF ได้รับ Ai มีความสม่ำเสมอสูง
- การแผ่รังสีของเสาอากาศปลายน้ำได้รับการปรับปรุง 4 เดซิเบลผ่าน ANAFI
การออกแบบภายนอกของวิทยุกำลังสูง
ด้านหน้าของวิทยุเพิ่มกำลังสูงสุดที่ฐานของเสาอากาศด้วยความเป็นเส้นตรงที่ดีมากและ ความไว (-94 dBm ที่ 6.5 Mbps) เพื่อให้ได้พลังงาน จำกัด FCC สูงสุด

ความน่าเชื่อถือของ Wi-Fi
พารามิเตอร์ 802.11
แบนด์วิดท์ต่ำ, เวลาแฝงต่ำ, ความแปรปรวนของระดับการรับสัญญาณเนื่องจากความเร็วของ เสียงหึ่งๆ, ระยะไกล, การรบกวน พารามิเตอร์เหล่านี้รวมถึงการรวม การลองใหม่ เทคโนโลยี MiMo (STBC) อัตราข้อมูลเฟรมควบคุม และเงื่อนไขการตัดการเชื่อมต่อ
การป้องกันสัญญาณรบกวนอัจฉริยะ
ANAFI Ai มีอัลกอริธึมสำหรับการลบช่องสัญญาณ (2.4 GHz และ 5 GHz dual band) ในกรณีที่มีสัญญาณรบกวน
การปรับตัวและการตรวจสอบการไหล
ANAFI Ai ตรวจสอบสถานะของลิงก์ 4 Hz อย่างต่อเนื่องและสามารถตรวจจับสัญญาณรบกวนได้ สิ่งนี้ช่วยให้คุณปรับแบนด์วิดท์และขนาดของแพ็กเก็ตที่ส่งให้เหมาะสมแบบไดนามิก นอกจากนี้ยังแจ้งเตือนนักบินหากเขาอยู่ในสภาพแวดล้อมที่ติดขัดเป็นพิเศษหรือกำลังจะสูญเสียสัญญาณ
การลดแบนด์วิดท์
ที่ขีดจำกัดของช่วงและหากเงื่อนไขอนุญาต ANAFI Ai สามารถเปลี่ยนเป็นแบนด์วิดท์ 10 MHz เพื่อปรับปรุงความไว 3 dB และเพิ่มช่วง 40%

สัญญาณวิทยุ
การออกอากาศวิดีโอ
ตัวบ่งชี้ลิงก์วิดีโอ
ใช้อัลกอริธึมการเพิ่มประสิทธิภาพสตรีมวิดีโอ
Parrot Gen4 Streaming (รุ่นที่ 4)
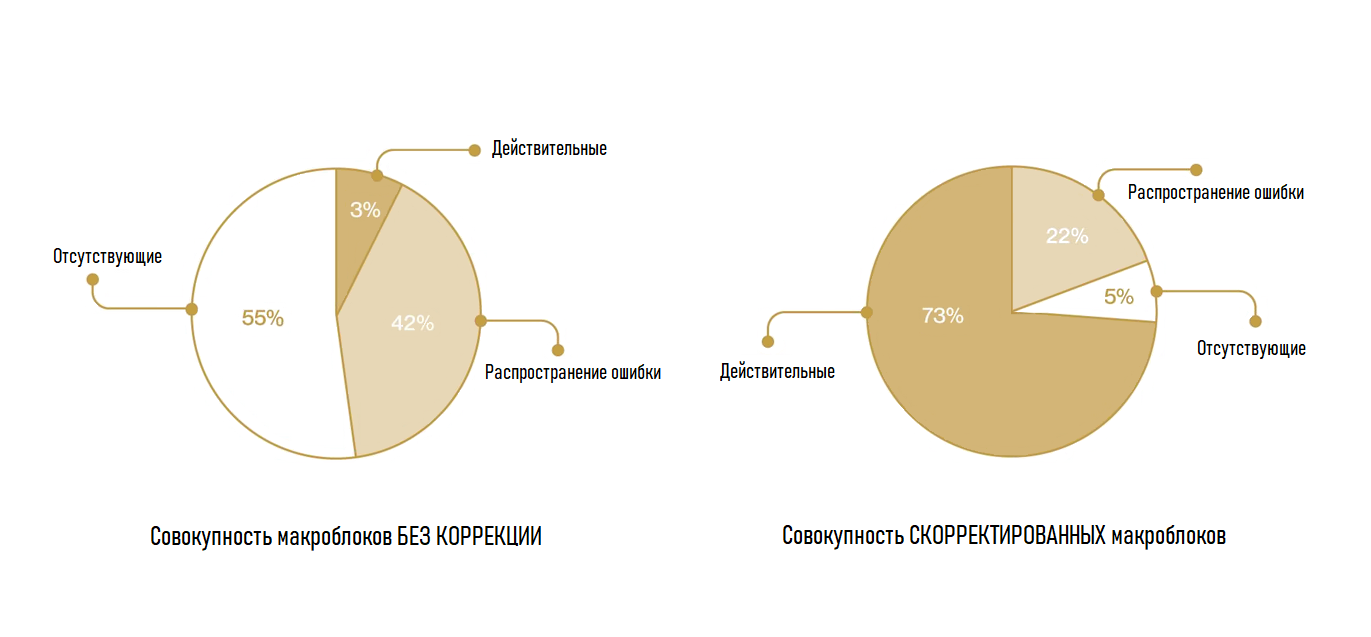
อัลกอริธึมนี้ช่วยลดผลกระทบทางสายตาของการสูญเสียเครือข่ายและให้การทำงานร่วมกัน ตัวถอดรหัสทั้งหมดในขณะที่ให้กระแสที่สมบูรณ์ทางวากยสัมพันธ์: ส่วนที่ขาดหายไปของรูปภาพจะถูกสร้างขึ้นใหม่เป็นส่วนที่ขาดหายไป เช่นเดียวกับที่อยู่ในรูปภาพอ้างอิง
ดังนั้น ข้อบกพร่องมีอยู่ในพื้นที่ที่มีแนวโน้มที่จะสูญเสีย และไม่นำไปใช้กับภาพทั้งหมด
กราฟด้านล่างแสดงอัตราความสำเร็จสำหรับการถอดรหัสมาโครบล็อกที่การสูญเสียเครือข่าย 5% โดยมีและไม่มีฟีเจอร์การสตรีมขั้นสูงของ ANAFI Ai อัลกอริธึมช่วยให้แน่ใจว่าการถอดรหัสมาโครบล็อก 75% ถูกต้อง พวกเขาอนุญาตให้ผู้ใช้ทำภารกิจต่อไปโดยไม่ทำให้หน้าจอค้างหรือสูญเสียการสตรีม
การควบคุมความแออัด
อัลกอริธึมยังประเมินสภาพแวดล้อม Wi-Fi และวิทยุเพื่อคาดการณ์และหลีกเลี่ยงการสูญเสียแพ็กเก็ตและความแออัดของเครือข่าย ซึ่งช่วยลดเวลาแฝงอัลกอริทึมนี้ใช้การประมาณความจุของช่องสัญญาณ โดยคำนวณจากอัตราข้อมูลและอัตราข้อผิดพลาดที่ชั้นกายภาพ จากนั้นจะส่งผลต่อการเข้ารหัสเครือข่ายและพารามิเตอร์การห่อหุ้ม
ข้อมูลเมตา
ข้อมูลเมตาถูกส่งไปยังสตรีมวิดีโอ โดยเฉพาะอย่างยิ่ง ประกอบด้วยองค์ประกอบการวัดระยะของโดรน (ตำแหน่ง ความสูง ความเร็ว ระดับแบตเตอรี่ ฯลฯ) และตัวชี้วัดวิดีโอ (มุมกล้อง ค่าแสง ขอบเขตการมองเห็น ฯลฯ)
การซิงโครไนซ์รูปภาพและข้อมูลเมตาแบบเปิดทำหน้าที่ของตำแหน่งที่แม่นยำบนแผนที่ การติดตามเครื่องมือการบินใน HUD หรือการเปิดใช้งานองค์ประกอบความเป็นจริงเสริม
ข้อมูลเมตาถูกรวมโดยใช้วิธีการมาตรฐาน (ส่วนขยายส่วนหัว RTP); รูปแบบข้อมูลที่กำหนดโดย Parrot เป็นโอเพ่นซอร์ส: มีอยู่ใน ANAFI Ai SDK
กล้อง

เซ็นเซอร์ 48MP
ANAFI Ai matrix รวมจำนวนมากของ ล้านพิกเซลสำหรับการถ่ายภาพทางอากาศอย่างละเอียด
ใช้เทคโนโลยีอาร์เรย์ฟิลเตอร์สีของ Quad Bayer โดยที่กลุ่มพิกเซลที่อยู่ติดกัน 4 พิกเซลมีสีเดียวกัน ดังนั้นการจับภาพ HDR แบบเรียลไทม์สามารถทำได้ทั้งในโหมดภาพถ่ายและวิดีโอโดยการเพิ่มสัญญาณจากสี่พิกเซลที่อยู่ติดกัน
ช่วงไดนามิกของมันคือ 4 เท่าของเมทริกซ์ไบเออร์มาตรฐาน แม้แต่ฉากที่ซับซ้อนก็สามารถถ่ายทำได้ด้วยการเน้นหรือสูญเสียรายละเอียดของเงาน้อยที่สุด
เลนส์
เลนส์ ANAFI Ai ได้รับการพัฒนาเป็นพิเศษสำหรับนกแก้ว ประกอบด้วยชิ้นเลนส์ Aspherical 6 ชิ้น และได้รับการปรับให้เหมาะสมเพื่อลดแสงแฟลร์ทางแสง เลนส์นี้ให้ 68 ° HFoV ในโหมดวิดีโอมาตรฐานและ 64.6 ° HFoV ในโหมดภาพถ่ายมาตรฐาน

โหมดวิดีโอ
ANAFI Ai จับภาพวิดีโอ 4K ที่ราบรื่นที่ 60 เฟรมต่อวินาทีรวมถึง P-Log และ HDR10 4K วิดีโอสูงสุด 30fps ตารางด้านล่างแสดงรายการโหมดวิดีโอ ANAFI Ai ทั้งหมด

การเข้ารหัสวิดีโอ
ผู้ใช้สามารถเลือกระหว่าง H.264 (AVC) และ H.265 (HEVC)
ความละเอียดทั้งหมดใช้รูปแบบพิกเซลต่อไปนี้:
- YUV420p (พื้นที่สี 8-bpc BT.709) สำหรับโหมดมาตรฐานและ HDR8
- YUVJ420p (8 บิต / ส่วนประกอบเต็มช่วง - BT.709 color space) สำหรับรูปแบบ P-log
- YUV420p10 (พื้นที่สี 10bpc BT.2020) สำหรับการบันทึก HDR10, H.265 เท่านั้น
HDR
เมื่อบันทึกวิดีโอใน HDR8 และ HDR10 ANAFI Ai จะครอบคลุมช่วงไดนามิกที่ 14EV รูปแบบ HDR10 ให้ความสว่างสูงสุด 1,000 นิต และความลึกของสี 10 บิต ให้ช่วงสีพันล้านสีเทียบกับ 16 ล้านช่วงไดนามิกมาตรฐาน เมื่อเปรียบเทียบกับ HDR8 แล้ว HDR10 จะให้ภาพที่สว่างกว่าสองเท่าพร้อมความเปรียบต่างที่เพิ่มขึ้นที่สอดคล้องกันสามารถแสดง HDR8 บนหน้าจอมาตรฐานใดก็ได้ ในขณะที่ HDR10 ใช้สำหรับทีวีและหน้าจอ HDR10
โหมดภาพถ่าย
คำอธิบายของโหมด
ส่วนการควบคุมโหมดประกอบด้วยการตั้งค่าที่ส่งผลต่อจำนวนภาพที่ถ่ายทุกครั้งที่ลั่นชัตเตอร์.
โหมดถ่ายภาพเดี่ยว
โหมดถ่ายภาพเดี่ยวมาตรฐาน หลังจากการลั่นชัตเตอร์แต่ละครั้ง ระบบจะประมวลผลภาพที่ถ่ายไว้ทันที
โหมดถ่ายคร่อม
ผู้ใช้สามารถถ่ายชุด 3, 5 หรือ 7 เฟรมด้วยค่าแสงที่แตกต่างกันสำหรับแต่ละเฟรม มีการตั้งค่าล่วงหน้าดังต่อไปนี้:
- [-1 EV, 0, 1 EV] (การตั้งค่าเริ่มต้น)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

โหมดถ่ายภาพต่อเนื่อง
โหมดถ่ายภาพต่อเนื่องจะช่วยให้ผู้ใช้สามารถถ่ายภาพต่อเนื่องได้ 10 เฟรมใน 1 วินาที
โหมดพาโนรามา
โหมดพาโนรามารวมสี่ภาพพาโนรามาที่แตกต่างกัน:
- ทรงกลม (360 °) เป็นโหมดพาโนรามาที่มีสามตัวเลือกสำหรับ การถ่ายภาพพาโนรามาทรงกลม: Sphere / Little Planet / Tunnel
- แนวนอน (180 °)
- แนวตั้ง (109 °)
- Superwide - ซุปเปอร์ใหม่ โหมดต่อภาพแบบกว้าง 9 ภาพ (HFOV 110 °, พาโนรามาแบบตรง)
สำหรับรายละเอียดเกี่ยวกับข้อกำหนดของโหมดพาโนรามา โปรดดูตารางด้านล่าง:

โหมดไทม์แลปส์
โหมดนี้อนุญาตให้คุณถ่ายภาพในช่วงเวลาคงที่ต่อไปนี้:
- 48MP: 1, 2, 4, 10, 30 หรือ 60 วินาที
- 12MP: 0.5, 1, 2, 4, 10, 30 หรือ 60 วินาที
โหมด GPS Lapse
โหมดภาพถ่ายนี้ได้รับการพัฒนาสำหรับการตรวจสอบและการวัดภาพถ่าย ช่วยให้คุณถ่ายภาพตามระยะห่างที่กำหนดต่อไปนี้: 5, 10, 20, 50, 100 หรือ 200 เมตร
ตารางด้านล่างแสดงโหมดการถ่ายภาพนิ่งและความละเอียด รวมถึงโหมดการอ่านข้อมูลเซ็นเซอร์:
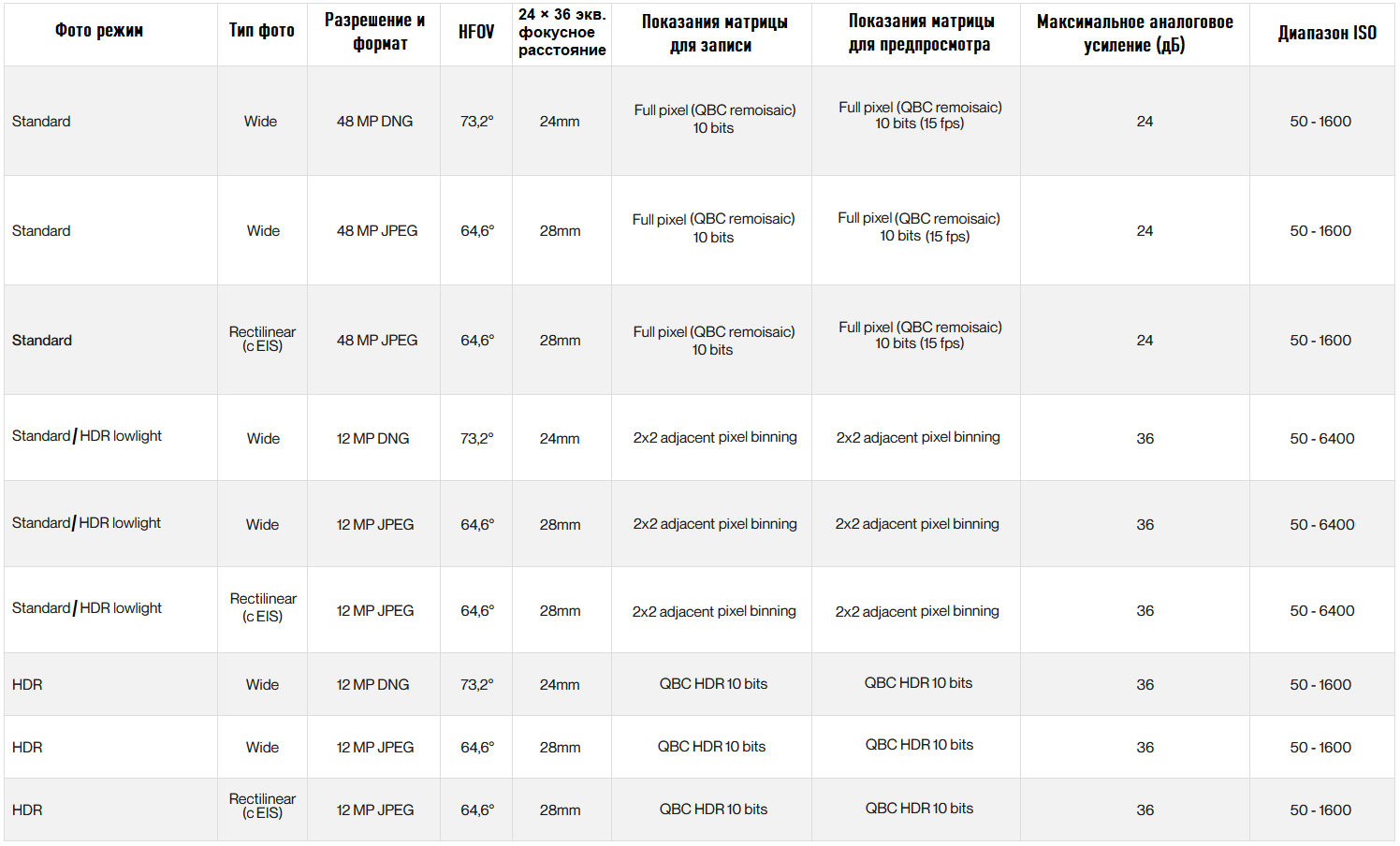
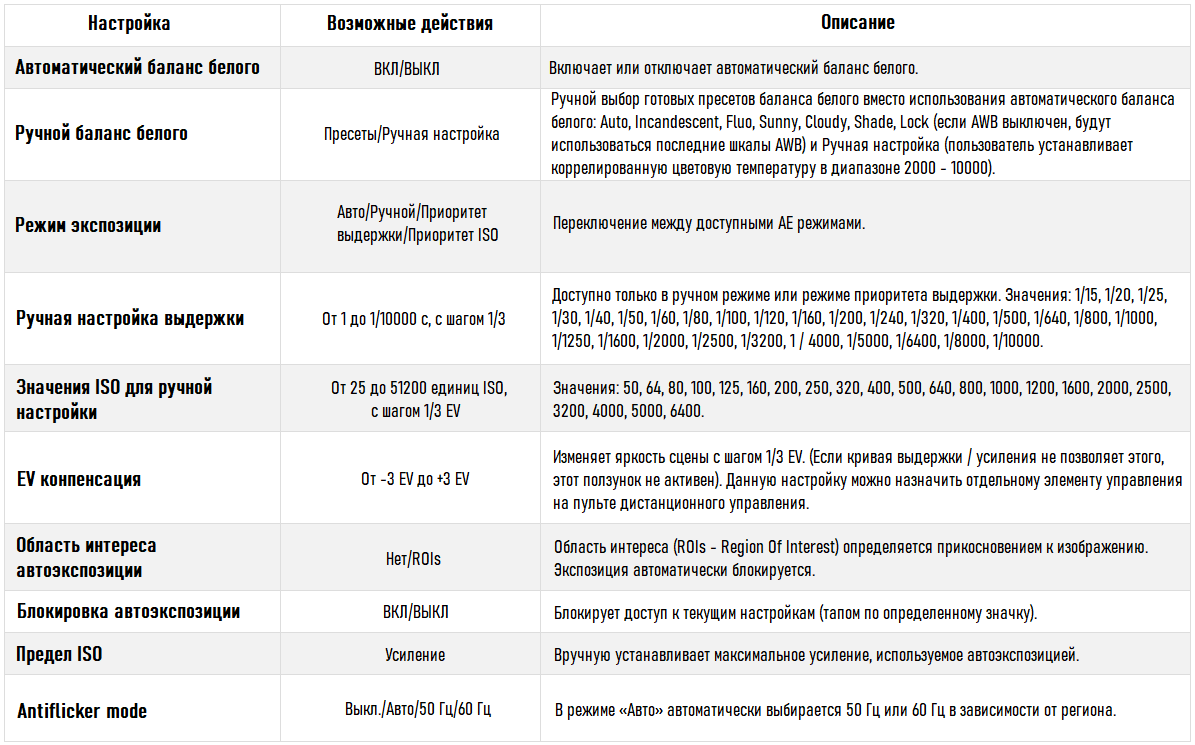
การตั้งค่า
ดังต่อไปนี้ ตารางแสดงรายการการตั้งค่าที่ใช้ได้สำหรับแต่ละโหมด
ซูม 6 เท่า
ซูมได้ในโหมดภาพถ่ายและวิดีโอทั้งหมด เมื่อรวมกับเซ็นเซอร์ความละเอียด 48 เมกะพิกเซล อัลกอริธึมการลับคมที่แม่นยำจะสร้างภาพที่มีความละเอียดสูงได้แม้จะใช้ซูมดิจิตอล 6 เท่าก็ตาม ผู้ใช้ ANAFI Ai สามารถดูรายละเอียด 1 ซม. จากระยะ 75 ม. จำนวนพิกเซลสูงยังช่วยให้สามารถตัดวิดีโอ 4K เป็น 1080p ได้โดยไม่สูญเสียคุณภาพ

การรักษาเสถียรภาพแบบไฮบริด
ANAFI Ai มีความเสถียรที่แม่นยำที่สุดในตลาด micro UAV
มันรวมการรักษาเสถียรภาพแบบรวม:
- กลไก 3 แกน (กลไก 3 แกนGimbal)
- แกนอิเล็กทรอนิกส์ 3 แกน (EIS)
การรักษาเสถียรภาพทางกลทำให้แกนชี้กล้องมีความเสถียรโดยไม่คำนึงถึงตำแหน่งการบินของโดรน การป้องกันภาพสั่นไหวแบบอิเล็กทรอนิกส์จะแก้ไขเอฟเฟกต์การสั่นสะเทือนระดับไมโครสำหรับความถี่ที่สูงกว่า 100 Hz ซึ่งไดรฟ์เชิงกลไม่สามารถจัดการได้
gimbal ของกล้องหลัก
การรักษาเสถียรภาพทางกลไกช่วยให้คุณปรับแกนแนวนอนของมุมมองกล้องให้คงที่และปรับทิศทางในทั้ง 3 แกนได้
 กลไกการหมุน 3 แกน ระบบกันสะเทือนของกล้องหลัก ANAFI Ai
กลไกการหมุน 3 แกน ระบบกันสะเทือนของกล้องหลัก ANAFI Ai
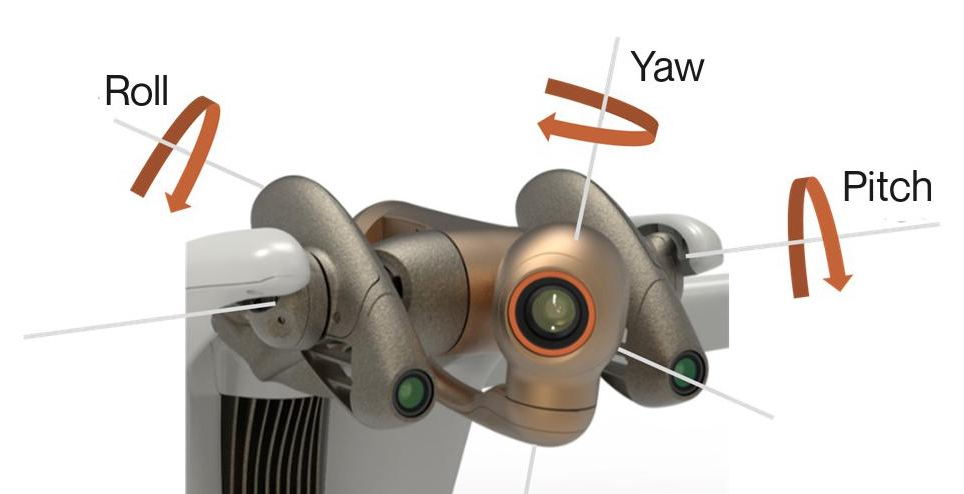
คุณสมบัติหลัก
- Gimbal เชิงกล 3 แกนสำหรับกล้องหลัก
- Vertical Offset 292 °, มุมมองภาพ -116 ° ถึง 176 °
ประสิทธิภาพ Gimbal
- อัลกอริธึม EIS แก้ไขผลกระทบจากการโยกเยกและการบิดเบือนของเลนส์มุมกว้างและยังดำเนินการดิจิตอล 3 แกน ระบบป้องกันภาพสั่นไหว (Roll, Pitch และ Yaw)
- วิธีการประกอบด้วยการใช้การแปลงทางเรขาคณิตของภาพ การแปลงรูปเรขาคณิตเกี่ยวข้องกับการประทับเวลาและตำแหน่งที่แน่นอนด้วย IMU
- การแปลงทางเรขาคณิตถูกนำไปใช้กับแต่ละภาพตามความผิดเพี้ยนของแสง การสั่น และการเคลื่อนไหวของหน่วยกล้องที่วัดได้
Pivot range 292 °
กล้องมีช่วงการหมุนในแนวนอนที่ -116 ° / 176 °รอบแกน pitch จึงให้การสังเกตด้านบนและด้านล่างของโดรนซึ่งเป็น โอกาสพิเศษในตลาด micro-UAV
![]()
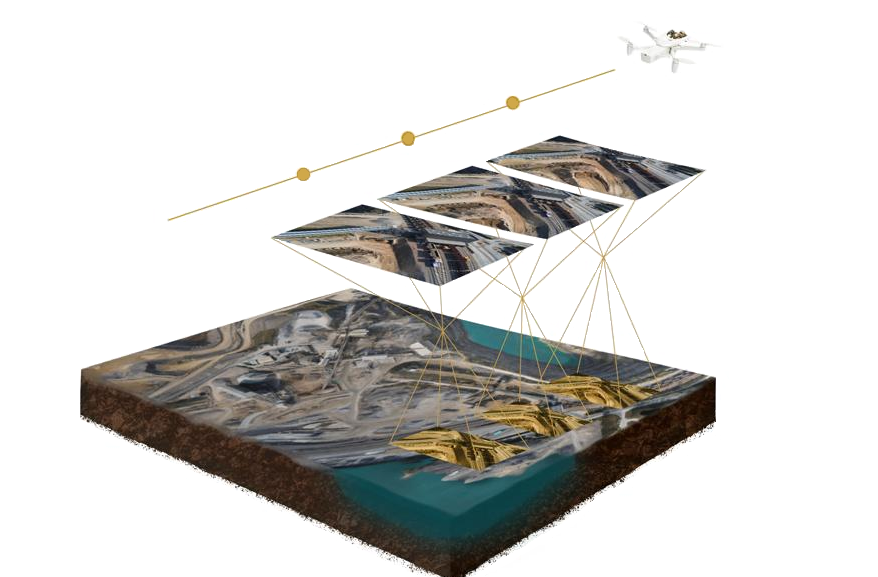
Photogrammetry
ภาพถ่ายทางอากาศด้วยยานพาหนะไร้คนขับกำลังเปลี่ยนวิธีที่ผู้เชี่ยวชาญดำเนินการตรวจสอบและสำรวจ วิธีการ Photogrammetry ใช้ในการประมวลผลภาพที่รวบรวมโดย UAV เพื่อสร้างแบบจำลอง 2D และ 3D ซึ่งภายหลังช่วยให้ลูกค้าสามารถกำหนดเวลาการบำรุงรักษาวัตถุที่สำรวจได้ในเวลาที่เหมาะสม
4G มอบความน่าเชื่อถือที่ไม่เคยมีมาก่อนของการเชื่อมโยงข้อมูลโดรน ผู้ใช้สามารถใช้งาน UAV ได้ในพื้นที่ขนาดใหญ่ ใกล้โครงสร้างโลหะ อาคาร โดยไม่ต้องกลัวว่าจะสูญเสียการสื่อสาร
การตรวจสอบและการทำแผนที่
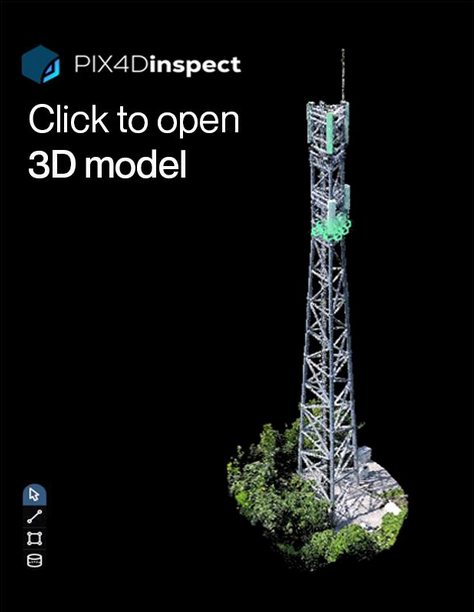
โดยการรวม AI ของโดรน ANAFI Ai เข้ากับแพลตฟอร์มออนไลน์ PIX4Dinspect ผู้ใช้จะสามารถดำเนินการได้ ตรวจสอบได้รวดเร็วและมีประสิทธิภาพมากขึ้นกว่าเดิม หรือ. อัลกอริธึมแมชชีนเลิร์นนิงจะจดจำเสาอากาศบนเสาเซลล์ กำหนดขนาด ความสูง ความลาดเอียง แอซิมัท และแนวตั้ง
คลิกที่ภาพด้านล่างเพื่อดูแบบจำลอง 3 มิติสาธิตที่สร้างโดย ANAFI Ai
ตัวอย่าง # 1

ตัวอย่าง # 2
เมทริกซ์ที่ดีที่สุดในกลุ่ม
กล้องของโดรน ANAFI Ai มาพร้อมกับเซ็นเซอร์ CMOS ขนาด 1/2 นิ้ว 48MP ที่สร้างขึ้นโดยใช้เทคโนโลยีฟิลเตอร์สี Quad Bayer ซึ่งเหมาะสำหรับการตรวจสอบและการวัดภาพถ่ายมากกว่าที่เคยเมทริกซ์ที่ใช้ช่วยให้คุณได้ภาพที่มีรายละเอียดด้วยช่วงไดนามิกที่กว้าง
ภาพถ่ายความละเอียดสูง
ANAFI Ai สามารถสร้างภาพนิ่งขนาด 48 เมกะพิกเซลได้ จึงเก็บรายละเอียดทั้งหมดด้วยความละเอียดสูงและสร้างจุดคลาวด์ที่มีความหนาแน่นสูง
ความคมชัดที่สำคัญ
ภารกิจการตรวจสอบจำเป็นต้องมีความสามารถในการระบุรายละเอียดนาที เช่น หมายเลขซีเรียล ขั้วต่อ คราบสนิม และรอยแตกเริ่มต้น
ช่วงไดนามิกกว้าง
ช่วงไดนามิก 10 สต็อปในโหมดมาตรฐาน, 14 สต็อปในโหมด HDR การไล่สีภาพที่เหมาะสมเป็นสิ่งสำคัญในการสร้างจุดบนคลาวด์ที่สอดคล้องกันและการสร้างใหม่ 2D หรือ 3D คุณภาพสูง
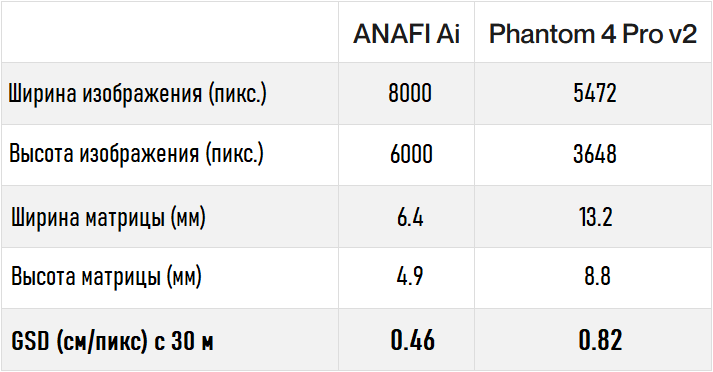
รายละเอียดมากกว่าเซ็นเซอร์ 1 นิ้ว 55%
เซ็นเซอร์ Quad Bayer ขนาด 48MP 1/2 นิ้วของโดรน ANAFI Ai นั้นคมชัดกว่าเซ็นเซอร์ 1 นิ้ว 20MP 1 นิ้วที่ใช้ในหลาย ๆ โดรนมืออาชีพที่ทันสมัย ภาพต่อไปนี้จากการตรวจสอบหลังคา ANAFI Ai และ DJI Phantom 4 Pro V2.0 ที่ความสูงเท่ากันแสดงให้เห็นอย่างชัดเจนถึงข้อเท็จจริงนี้

เหมาะอย่างยิ่งสำหรับการตรวจสอบ
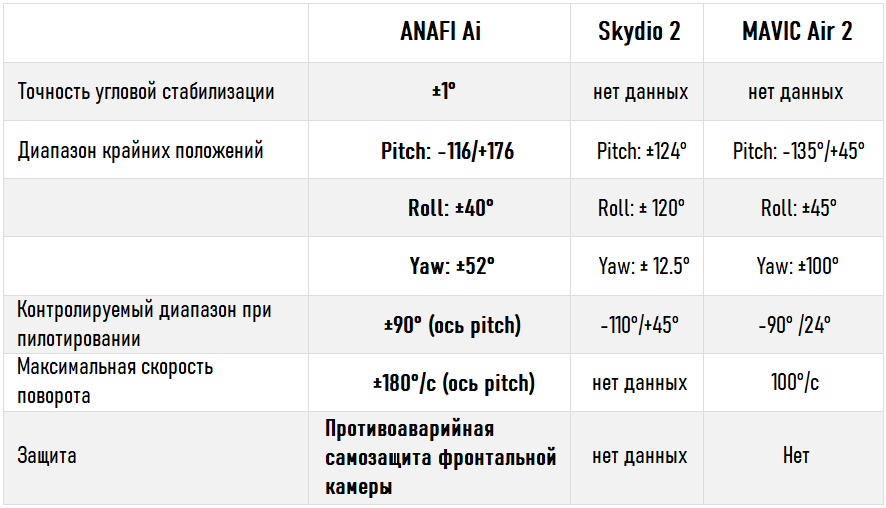
ANAFI Ai gimbal มีระบบป้องกันภาพสั่นไหวแบบไฮบริด 6 แกน (อิเล็กทรอนิกส์เครื่องกล) ที่ชดเชยความผันผวนของเที่ยวบินและให้ความคมชัดของภาพ กล้อง ANAFI Ai มีช่วงที่ปรับได้ตั้งแต่ -90 ° ถึง 90 ° ทำให้เป็นเครื่องมือทางอากาศที่เหมาะสำหรับการดูด้านล่างของฐานสะพาน
ควบคุมความเอียงได้ ± 90 °
ความแม่นยำ
ANAFI Ai ช่วยให้ผู้ใช้บรรลุ GSD 0.46 ซม. / พิกเซลจากความสูง 30 ม. ซึ่งหมายถึงการวัดระดับความแม่นยำสัมพัทธ์สูงถึง 0.92 ซม.
สำหรับการเปรียบเทียบ DJI Phantom 4 Pro V2ที่ความสูงเท่ากันให้ GSD เพียง 0.82 ซม. / พิกเซล กล่าวอีกนัยหนึ่ง ANAFI Ai สามารถทำแผนที่เป้าหมายเดียวกันได้ โดยบินได้สูงกว่า Phantom มากกว่า 1.5 เท่า โดยมีรายละเอียดในระดับที่เทียบเท่ากัน
ความสามารถของ AI และ 4G
หนึ่งแอพ แผนการบินใด ๆ
ศักยภาพของแอพมือถือ FreeFlight 7 ช่วยให้ผู้ใช้สามารถเปิดภารกิจการสำรวจ การตรวจสอบ และการวัดภาพถ่ายทั้งหมดได้

โหมดการบินด้วยภาพถ่ายที่ใช้งานได้
โหมดการบินตามภาพถ่ายต่อไปนี้มีอยู่ในแอปพลิเคชันมือถือ FreeFlight 7:
- กริด
- สองกริด
- วงกลม
สร้างแผนการบินในการแตะครั้งเดียว
การแตะหนึ่งครั้งบนแผนที่แบบโต้ตอบ FreeFlight 3D เป็นสิ่งที่คุณต้องการ สำหรับการสแกนอาคารอย่างรวดเร็ว ปัญญาประดิษฐ์จะกำหนดพารามิเตอร์และวิถีการบินที่เหมาะสมที่สุดโดยอัตโนมัติ ภาพ 48MP พร้อมการอ้างอิงทางภูมิศาสตร์ที่แม่นยำของเซ็นเซอร์ ANAFI Ai (IMU, GNSS และเวลาเที่ยวบิน) ช่วยให้สร้าง 3D ได้อย่างแม่นยำ
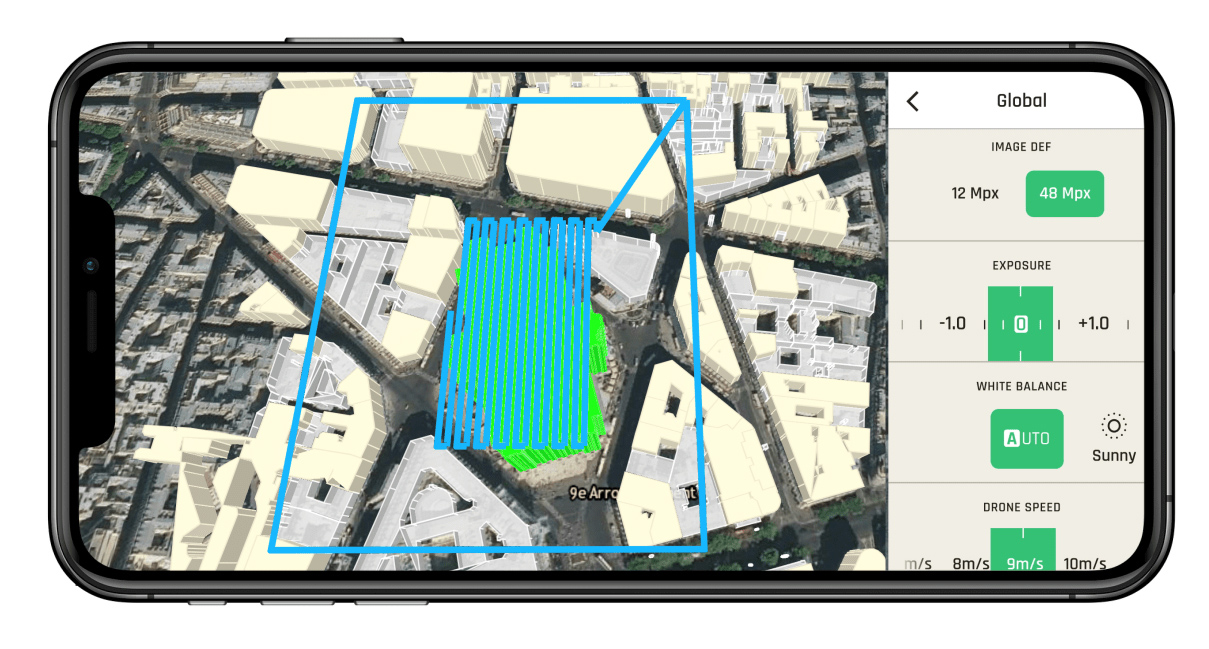 แผนการบินอัตโนมัติที่สร้างขึ้นด้วยการแตะเพียงครั้งเดียวในการลงทะเบียนที่ดิน 3 มิติ
แผนการบินอัตโนมัติที่สร้างขึ้นด้วยการแตะเพียงครั้งเดียวในการลงทะเบียนที่ดิน 3 มิติ
- พื้นหลังการทำแผนที่ของ FreeFlight 7 มาจากซอฟต์แวร์ ArcGIS การแสดงสิ่งปลูกสร้าง 3 มิติอิงตามข้อมูล OpenStreetMap ที่ครอบคลุมเมืองต่างๆ ทั่วโลก
- ระบบการมองเห็นช่วยให้มั่นใจในความปลอดภัยของแผนการบินที่กำหนด: ผู้ใช้ไม่จำเป็นต้องกังวลเกี่ยวกับอุปสรรค ANAFI Ai หลีกเลี่ยงพวกเขาอย่างอิสระ
การบินอัตโนมัติ
ระบบเซ็นเซอร์รอบทิศทาง ANAFI Ai ซึ่งอิงจากการมองเห็นสามมิติ จะปรับทิศทางตัวเองไปในทิศทางของการเดินทางโดยอัตโนมัติ

โดรนตรวจจับสิ่งกีดขวางที่อยู่ห่างออกไป 30 เมตร เทคโนโลยี AI จะสร้างและปรับปรุงกริด infill อย่างต่อเนื่องในขณะที่ดำเนินการตามแผนการบินที่กำหนด มันแสดงถึงสภาพแวดล้อมของโดรนใน voxels
อัลกอริธึมกำหนดวิถีที่ดีที่สุดเพื่อหลีกเลี่ยงการชนกับสิ่งกีดขวาง ในขณะที่โดรนยังคงโฟกัสไปที่เป้าหมาย: ภารกิจการบินที่ได้รับมอบหมาย

การเชื่อมต่อ 4G
ANAFI Ai เป็น microdron เชิงพาณิชย์เครื่องแรกที่ติดตั้งโมดูล 4G ครอบคลุมกว่า 98% ของความถี่ที่ใช้ทั่วโลก

สำรวจสายไฟฟ้าแรงสูง ถ่ายด้วย ANAFI Ai ตัดต่อด้วย Pix4Dmatic ขนาดฉาก: 4060 × 60 × 70 ม. จำนวนภาพ: 2172 GSD: 1.3 ซม. / พิกเซล ความสูง: 90 ม. ด้านหน้า / ทับซ้อนกันด้านข้าง: 90% / 65%
โดรนสามารถเปลี่ยนจาก Wi-Fi เป็น 4G ได้อย่างราบรื่นและในทางกลับกัน จึงมีการเชื่อมต่อที่เชื่อถือได้มากที่สุด ซึ่งรับประกันได้ว่า:
- ความสามารถในการ ดำเนินการเที่ยวบิน BVLOS
- การเชื่อมต่อที่เสถียรแม้ในขณะที่บินในสภาพแวดล้อมที่มีสิ่งกีดขวางและอาคาร
- บินอย่างปลอดภัยในสภาพแวดล้อมที่มีเสียงรบกวนสูง
- คุณภาพลิงก์วิดีโอ 1080p @ 30 fps
- อัปโหลดรูปภาพไปยังเซิร์ฟเวอร์คลาวด์โดยตรง

การปรับเวลาเที่ยวบินให้เหมาะสม
ตามที่นักพัฒนาระบุว่าสามารถประหยัดเวลาได้อย่างมากเนื่องจากสูง ประสิทธิภาพของภาพ ANAFI Ai:
- 48MP ช่วยให้เสียงพึมพำสามารถบินได้สูงกว่าโดรนมากกว่า 1.5 เท่าด้วยเซ็นเซอร์ขนาด 1 นิ้ว 20MP ในขณะที่บรรลุ GSD เดียวกัน กล่าวอีกนัยหนึ่ง ระดับความสูงที่สูงกว่าและภารกิจที่เร็วกว่านั้นไปด้วยกัน
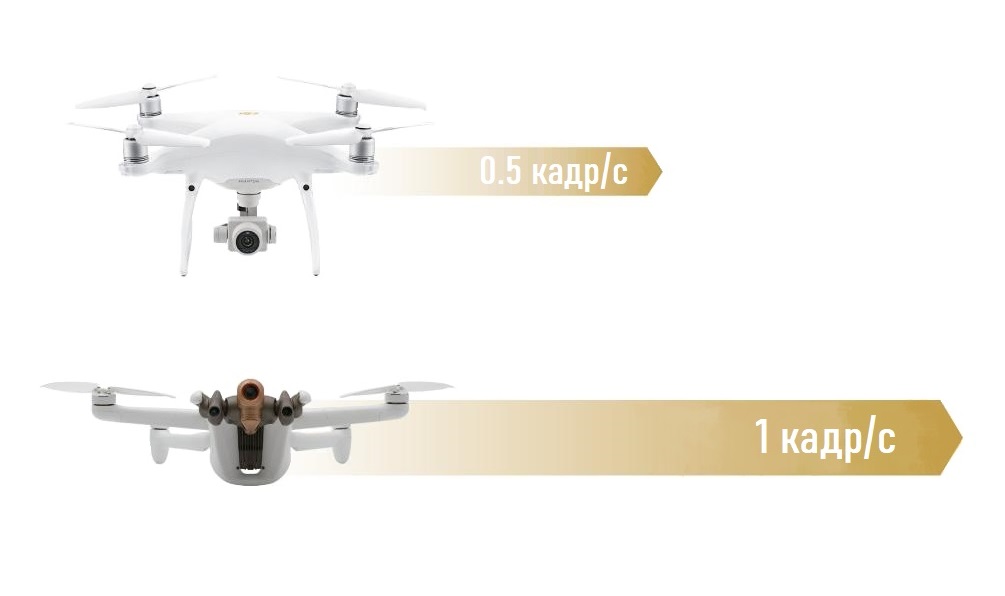
- การถ่ายภาพ 1 เฟรมต่อวินาที: ANAFI Ai ถ่ายภาพเร็วขึ้นสองเท่าของ Autel EVO 2 และ DJI Phantom 4 Pro V2.0
การถ่ายโอนข้อมูลบนเครื่องบิน 4G ไปยัง PIX4Dcloud
อยู่ในขั้นตอนการสร้างแบบจำลองดิจิทัลจากภาพถ่ายทางอากาศของโดรน การถ่ายโอนไฟล์และการประมวลผล ภาพถ่ายเป็นงานที่ต้องใช้เวลามาก ANAFI Ai ช่วยให้ผู้ใช้เพิ่มความเร็วเวิร์กโฟลว์ของพวกเขา โดยเฉพาะอย่างยิ่ง ระบบโดรนช่วยให้:
- ถ่ายโอนรูปภาพไปยังเซิร์ฟเวอร์ที่ปลอดภัยในเที่ยวบินโดยตรงโดยใช้การเชื่อมต่อ 4G ของโดรน
- เริ่มคำนวณวัตถุทันทีเมื่อสิ้นสุดการบิน: ออร์โธโมไซิกส์, พอยต์คลาวด์, แบบจำลองระดับความสูงและตาข่ายพื้นผิว
- แบ่งปันแผนที่ 2 มิติและแบบสำรวจคุณภาพ 3 มิติกับพนักงานและลูกค้าได้อย่างง่ายดาย
![]()
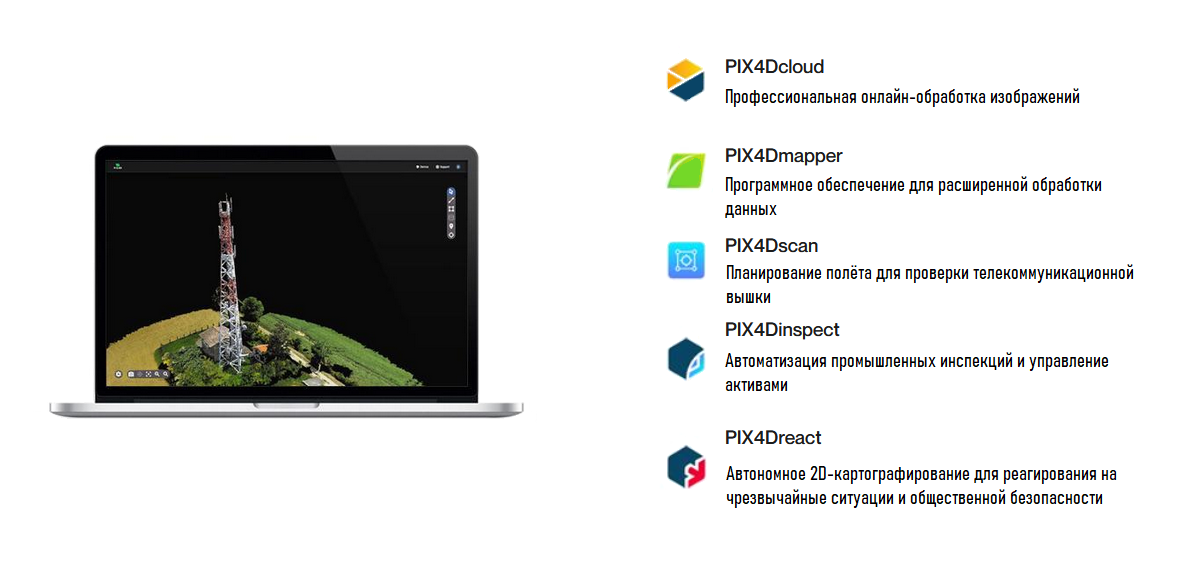
ความเข้ากันได้ของ PIX4D Suite
ANAFI Ai เข้ากันได้อย่างสมบูรณ์กับชุดแอปพลิเคชัน photogrammetry บนมือถือเดสก์ท็อปและคลาวด์ที่ไม่ซ้ำใครซึ่งประกอบด้วย:
Photogrammetry หรือ lidar
ทำไมต้องเลือก photogrammetry สำหรับการสำรวจและการตรวจสอบ? นอกจากการเข้าถึงได้ง่ายและใช้งานง่ายแล้ว การวัดภาพถ่ายทางอากาศยังเป็นตัวเลือกที่ดีที่สุดเมื่อต้องการการตีความข้อมูลด้วยสายตา
Photogrammetry pros
- ให้การแสดงภาพหลายภาพ: orthomosaic, color point cloud, textured mesh
- สร้างกลุ่มจุดที่มีความหนาแน่นสูงขึ้น ซึ่งแต่ละจุดมีข้อมูลจำนวนมาก (ความสูง พื้นผิว สี)
- เหนือกว่า LIDAR ในด้านความแม่นยำของการเรนเดอร์ 2D และ 3D เสมือนจริง - LIDAR ไม่ได้ให้รายละเอียดเชิงบริบทในระดับสูง
ข้อเสีย LIDAR
- ค่าใช้จ่ายมากกว่า UAV 100 เท่าที่มีเมทริกซ์ RGB
- ความซับซ้อนของการประมวลผลข้อมูลและข้อผิดพลาดในการตีความที่เป็นไปได้
- การเพิ่มข้อมูลสีเป็นไปได้ แต่จะทำให้กระบวนการยุ่งยากขึ้น
- LIDAR สร้าง point cloud เท่านั้น และมีไว้สำหรับกรณีและสถานการณ์เฉพาะ
SDK
Parrot Software Development Kit เป็นชุดเครื่องมือและซอฟต์แวร์โอเพนซอร์สสำหรับนักพัฒนา ตั้งแต่สร้างโดรน A. R. Drone ซึ่งเป็นซอฟต์แวร์โอเพ่นซอร์สของบริษัทสนับสนุนแพลตฟอร์มและเครื่องมือสำหรับนักพัฒนา และ Parrot
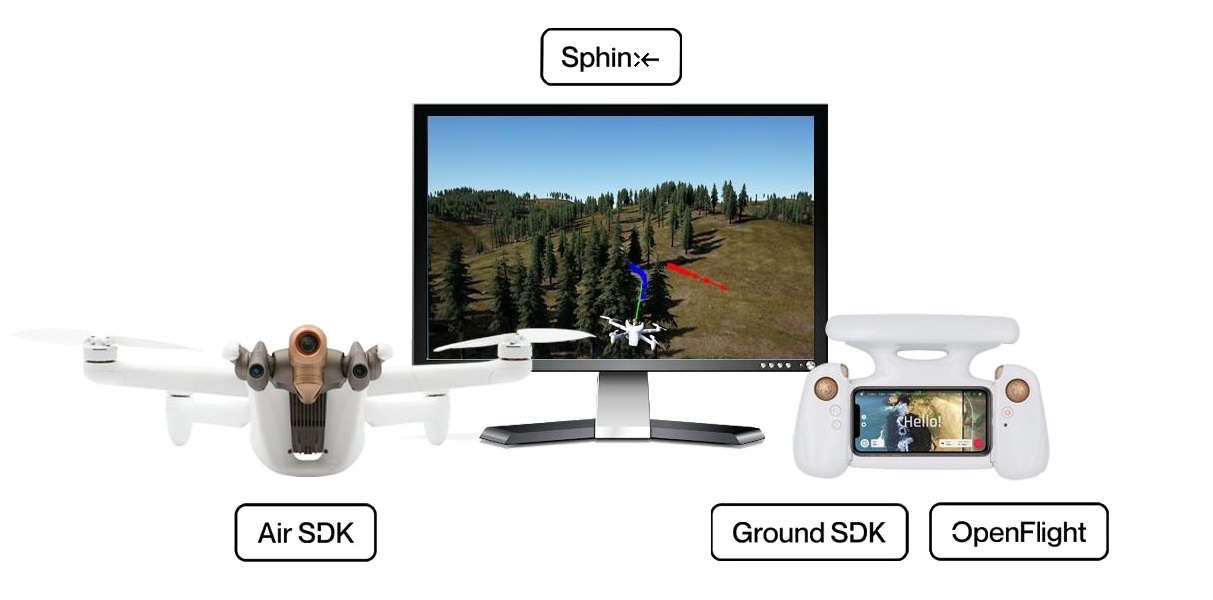
นักพัฒนาชี้แจงว่าทรัพยากร SDK ทั้งหมดของบริษัทมีให้บริการฟรีโดยไม่ต้องลงทะเบียนและติดตามบนพอร์ทัล " Parrot พอร์ทัลนักพัฒนา"... คุณยังสามารถเข้าร่วมนักพัฒนาหลายพันคนได้ที่ Parrot forum ซึ่งคุณสามารถพูดคุยเกี่ยวกับหัวข้อปัจจุบันกับวิศวกรของบริษัทได้โดยตรง
Air SDK
เรียกใช้โค้ดของคุณบน ANAFI Ai
Air SDK จัดเตรียมสถาปัตยกรรมเทคโนโลยีที่ปฏิวัติวงการเพื่อดาวน์โหลดและเรียกใช้โค้ด โดยตรงที่ ANAFI Ai นักพัฒนาสามารถตั้งโปรแกรมภารกิจการบินที่ออกแบบเองได้ด้วยการเข้าถึงเซ็นเซอร์โดรน อินเทอร์เฟซการเชื่อมต่อ และฟังก์ชั่นออโตไพลอตทั้งหมด
Air SDK ให้การเข้าถึงออนบอร์ดสำหรับ:
- เซ็นเซอร์ทั้งหมด (IMU, GPS, TOF) และโหมดการบิน
- สตรีมวิดีโอและข้อมูลเมตา กับกล้องทั้งหมด
- อินเทอร์เฟซการสื่อสาร Wi-Fi, 4G, USB
- แผนที่ความลึกและการเติมกริด
- การสร้างวิถีการหลีกเลี่ยงสิ่งกีดขวาง
นักพัฒนาทุกคนสามารถ:
- เปลี่ยนสถานะของโดรนโดยสร้างภารกิจการบิน
- เปลี่ยนโหมดการนำทาง
- เพิ่มกระบวนการ Linux แบบฝัง (สำหรับ เช่น ถ่ายโอนข้อมูลผ่านช่องสัญญาณ 4G หรือใช้คอมพิวเตอร์วิทัศน์)
Air SDK รองรับภาษาการเขียนโปรแกรม C หรือ Python Air SDK มาพร้อมกับคู่มือการติดตั้งโดยละเอียดและเอกสาร API ตัวอย่างการใช้งานจำนวนมากแสดงให้เห็นถึงความเป็นไปได้ทั้งหมดที่เสนอโดยสถาปัตยกรรมที่เป็นเอกลักษณ์
Ground SDK
สร้างแอพมือถือที่ทรงพลัง
Ground SDK เป็นแพลตฟอร์มซอฟต์แวร์ Ground Control Station (GCS) สำหรับอุปกรณ์มือถือ (รองรับทั้ง iOS และ Android) ช่วยให้นักพัฒนาสามารถสร้างแอปพลิเคชันมือถือสำหรับ ANAFI Ai เพื่อควบคุมโดรนได้โดยตรงจากอุปกรณ์มือถือในภายหลัง ฟังก์ชัน BVS ทั้งหมด (การควบคุม วิดีโอ การตั้งค่า) มีให้ใช้งานผ่าน API ที่ใช้งานง่ายและมีเอกสารครบถ้วน
OpenFlight
Open Source Ground Control Station
เป็นครั้งแรกที่ Parrot เปิดซอร์สโค้ดสำหรับแอปพลิเคชันสถานีควบคุมภาคพื้นดิน OpenFlight เป็นแกนหลักของแอป FreeFlight 7 โอเพ่นซอร์สที่มีชื่อเสียงของเรา ซึ่งช่วยให้นักพัฒนามุ่งเน้นไปที่การเพิ่มฟังก์ชันการทำงานของตนเองและมีแอปที่ดูเป็นมืออาชีพพร้อมที่จะเผยแพร่ไปยัง AppStore ในทันที

OpenFlight ประกอบด้วย:
- UX FreeFlight ทั้งหมด 7
- การตั้งค่าอินเทอร์เฟซทั้งหมด
- รหัสสำหรับการแสดงภาพสิ่งกีดขวาง 3 มิติแบบเรียลไทม์
- รหัสสำหรับจัดการการสื่อสาร 4G
- OpenFlight เผยแพร่ภายใต้ใบอนุญาต BSD-3 พร้อมคู่มือการติดตั้งที่สมบูรณ์และเอกสารประกอบที่ครอบคลุม
สฟิงซ์
3D Photorealistic Simulation
Parrot Sphinx เป็นเครื่องมือจำลองโดรนขั้นสูง วิศวกรนกแก้วใช้มันเพื่อพัฒนาและทดสอบคุณสมบัติ ANAFI Ai ทั้งหมด แนวคิดทั่วไปคือการจำลองเฟิร์มแวร์ที่แท้จริงของโดรนด้วยเซ็นเซอร์ทั้งหมดในสภาพแวดล้อมที่มองเห็นได้จริงและทางกายภาพ

Parrot Sphinx ช่วยให้:
- จำลองกล้องและเซ็นเซอร์ทั้งหมด
- จำลองแผนที่ความลึกและการแบ่งส่วน รูปภาพ
- นำทางในฉาก 3 มิติที่เหมือนจริงมากมาย
- เชื่อมต่อกับรีโมตคอนโทรลประเภทต่างๆ
- ใช้สคริปต์เพื่อควบคุมการจำลอง
- เพิ่มคนเดินถนนและยานพาหนะ
- แสดงภาพและบันทึกข้อมูลเที่ยวบิน
- ปรับเซ็นเซอร์เครื่องบินและองค์ประกอบทางกายภาพโดยรอบ
- ควบคุมปัจจัยเวลาจริง
Parrot Sphinx สร้างขึ้นบนพื้นฐานของมาตรฐานขั้นสูง ส่วนประกอบ:
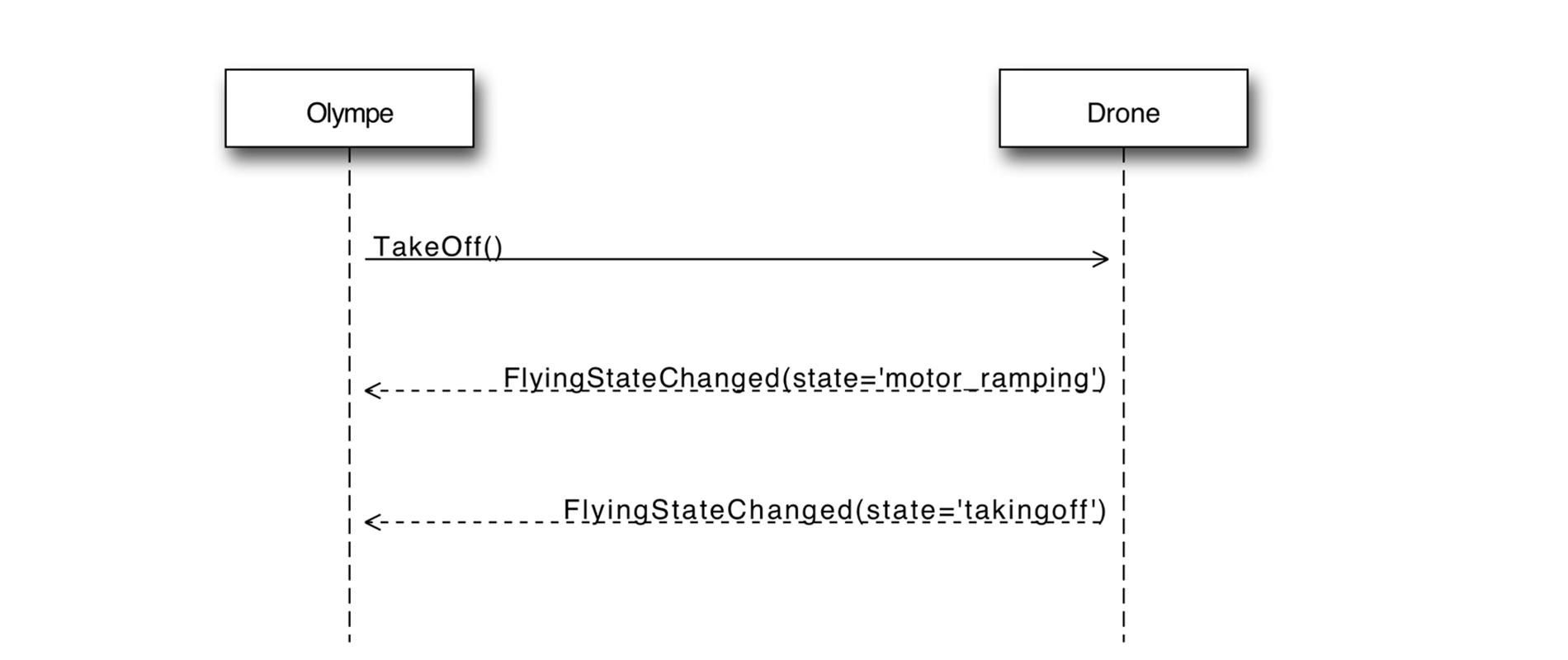
Olympe
Python เพื่อควบคุม ANAFI Ai
Olympe จัดเตรียมอินเทอร์เฟซการเขียนโปรแกรมตัวควบคุม Python สำหรับ ANAFI AI. จุดประสงค์ดั้งเดิมของ Olympe คือการโต้ตอบกับสภาพแวดล้อมการสร้างแบบจำลองสฟิงซ์ Olympe ยังสามารถควบคุม ANAFI Ai ทางกายภาพจากคอมพิวเตอร์ระยะไกลได้อีกด้วย
เฟรมเวิร์กของ Olympe ช่วยให้:
- เชื่อมต่อกับ ANAFI Ai จำลองหรือทางกายภาพ
- ส่งข้อความคำสั่ง (การนำร่อง การวางแนวกล้อง กลับบ้าน, แผนการบิน)
- เริ่มและหยุดการสตรีมวิดีโอจากกล้องทั้งหมด
- บันทึกสตรีมวิดีโอและข้อมูลเมตาที่ซิงโครไนซ์
PdrAW
Advanced Media Player
PDrAW เป็นโปรแกรมดูวิดีโอขั้นสูงสำหรับสื่อ ANAFI Ai โปรแกรมดูรองรับทั้งการสตรีม (RTP / RTSP) และวิดีโอที่บันทึก (MP4) บนแพลตฟอร์ม Linux, macOS, Android และ iOS PDrAW มาในรูปแบบไลบรารี (libpdraw), ไลบรารี wrapper (libpdraw-backend) และไฟล์ปฏิบัติการแบบสแตนด์อโลน (pdraw)
PDrAW ยังจัดการข้อมูลเมตาของวิดีโออีกด้วย ใน ANAFI Ai ทั้งการสตรีมและวิดีโอที่บันทึกไว้มีข้อมูลเมตาที่เปิดเผยต่อสาธารณะและจัดทำเป็นเอกสาร ซึ่งช่วยให้สามารถประมวลผลวิดีโอทางอากาศขั้นสูงได้
รุ่น C. A. D.
Parrot นำเสนอโมเดล 3 มิติของโดรนสำหรับรวมเข้ากับการออกแบบ CAD ของคุณสำหรับการสร้างต้นแบบอย่างรวดเร็วและการรวมอุปกรณ์เสริม
MAVLink และความเข้ากันได้ของ GUTMA
ANAFI Ai เข้ากันได้กับโปรโตคอลโอเพ่นซอร์ส MAVLink v1 มาตรฐาน ซึ่งช่วยให้สามารถแลกเปลี่ยนข้อมูลแบบเรียลไทม์ระหว่าง UAV และสถานีควบคุม ANAFI Ai สามารถควบคุมได้ด้วยตนเองหรือใช้การวางแผนการบินอัตโนมัติจากสถานีฐานที่รองรับ MAVLink เช่น QGroundControl
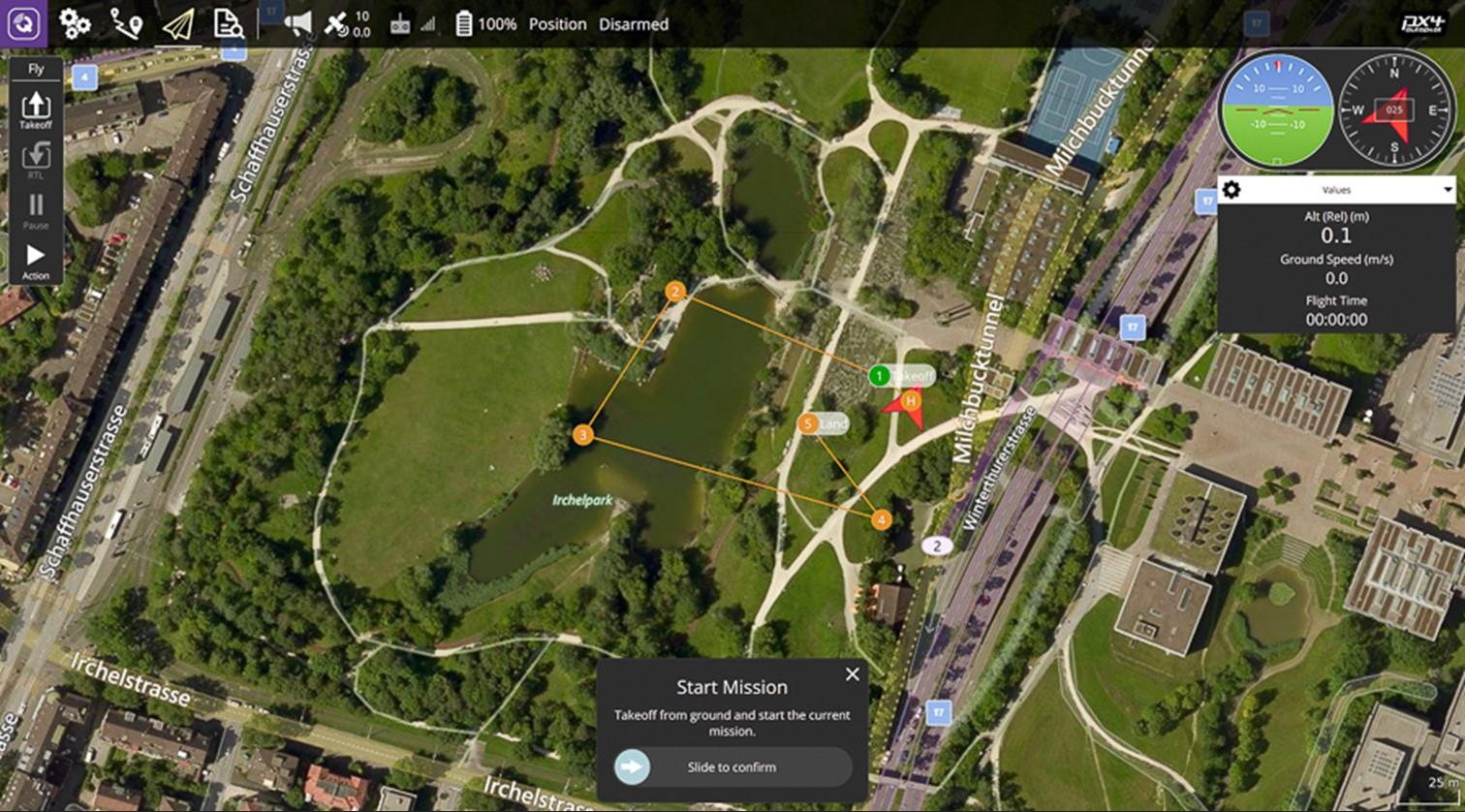
* อินเทอร์เฟซ QGroundControl
ANAFI Ai เข้ากันได้กับโปรโตคอลข้อมูลการบินมาตรฐาน GUTMA แบบโอเพนซอร์ส Global UTM Association เป็นสมาคมที่มีผู้เล่นหลักในด้านการควบคุมการจราจรทางอากาศ

ระบบนิเวศพันธมิตรที่ใหญ่ที่สุดสำหรับโดรน Parrot
Parrot ยังคงขยายระบบนิเวศทั่วโลกของผู้ให้บริการซอฟต์แวร์สำหรับโดรนผ่านโปรแกรม SDK ของพันธมิตร. นำเสนอโซลูชั่นเฉพาะและไม่ซ้ำใครสำหรับความต้องการที่เพิ่มขึ้นและการพัฒนาของผู้ใช้มืออาชีพ
นกแก้วสำหรับทุกความต้องการทางธุรกิจ
เพื่อให้ได้ประโยชน์สูงสุดจากกระบวนการตรวจสอบ Parrot นำเสนอระบบนิเวศของซอฟต์แวร์โดรนที่เข้ากันได้แก่ลูกค้าตั้งแต่การจัดการฝูงบิน การรวบรวมเที่ยวบิน วางแผนและนำเข้าบันทึกการบิน ก่อนยิง ทำแผนที่ ตรวจสอบ และวิเคราะห์ข้อมูลที่ได้รับ
PIX4D × Parrot
แอปพลิเคชันการสร้างแบบจำลอง 2D / 3D ชุดแอปพลิเคชันการวัดภาพถ่ายบนมือถือ เดสก์ท็อป และคลาวด์ที่ไม่เหมือนใคร
Verizon x Skyward x Parrot
โซลูชันโดรน 4G LTE ในสหรัฐอเมริกา โดรนหุ่นยนต์ ANAFI Ai ชนิดแรกที่เชื่อมต่อกับเครือข่าย Verizon 4G LTE พร้อมซอฟต์แวร์ Skyward ที่ติดตั้งไว้ล่วงหน้า เปิดประตูสำหรับการถ่ายโอนข้อมูลแบบเกือบเรียลไทม์ การปรับใช้ระยะไกล และเที่ยวบินที่ไม่อยู่ในสายตา

Skyward × Parrot
การบูรณาการและการเรียนรู้ภายในความสามารถของ ANAFI แพลตฟอร์มการจัดการการบิน รวมถึงน่านฟ้า การเข้าถึง LAANC และการฝึกอบรม อุปกรณ์และการเชื่อมต่อสำหรับการติดตั้งฝูงบินโดรนขององค์กร

DroneSense × Parrot
สร้าง จัดการ และปรับขนาดโปรแกรมโดรนของคุณ ผู้เชี่ยวชาญด้านอากาศยานไร้คนขับในภาคส่วนความปลอดภัยสาธารณะสามารถใช้ชุดความสามารถของ DroneSense ได้เต็มรูปแบบ ซึ่งออกแบบมาเป็นพิเศษสำหรับความต้องการของผู้เผชิญเหตุในเบื้องต้น

Parrot Ecosystem Partners

Parrot Affiliate Program
ผู้พัฒนาเสนอให้ขยายขีดความสามารถของ โปรแกรมของเขาสำหรับโดรนโดยการรวม SDK ของพวกเขา
ความปลอดภัยทางไซเบอร์
การรักษาความลับของข้อมูล
ผู้พัฒนาระบุว่าเขาไม่ได้รวบรวม ข้อมูลใด ๆ โดยไม่ได้รับความยินยอมจากผู้ใช้ การตัดสินใจว่าจะถ่ายโอนข้อมูลไปยังโครงสร้างพื้นฐานของ Parrot หรือไม่ขึ้นอยู่กับตัวผู้ใช้เองเท่านั้น ข้อมูลที่โฮสต์ใน Parrot ช่วยให้ผู้ใช้สามารถซิงโครไนซ์ข้อมูลเที่ยวบินและแผนการบินระหว่างอุปกรณ์ต่างๆ รวมทั้งอำนวยความสะดวกในการสนับสนุนและทำให้ Parrot ปรับปรุงผลิตภัณฑ์ของตนได้
ANAFI Ai ปฏิบัติตามกฎระเบียบให้ความคุ้มครองข้อมูลส่วนบุคคลของผู้บริโภคของสหภาพยุโรป (GDPR) และดำเนินการต่อไป เช่น อนุญาตให้คุณลบข้อมูลทั้งหมดได้ใน 1 คลิก ซึ่งช่วยให้ผู้ใช้สามารถควบคุมได้ง่ายที่สุดปัญหาในคลิกเดียวนี้ได้รับการแก้ไขในแอปพลิเคชันมือถือ FreeFlight7 หรือในการตั้งค่าความเป็นส่วนตัวของบัญชี Parrot. Cloud ดังนั้น ผู้ใช้เมื่อใดก็ได้ ไม่เพียงแต่สามารถหยุดการแลกเปลี่ยนข้อมูลเท่านั้น แต่ยังร้องขอการลบได้อย่างง่ายดายอีกด้วย
หากผู้ใช้ยินยอมให้แลกเปลี่ยนข้อมูล การประมวลผลจะดำเนินการในรูปแบบที่โปร่งใสอย่างสมบูรณ์ ซึ่งอธิบายรายละเอียดไว้ในนโยบายความเป็นส่วนตัวของ Parrot
เมื่อ ANAFI Ai เชื่อมต่อกับ Skycontroller 4 ผ่าน 4G โครงสร้างพื้นฐาน Parrot จะใช้ในการจับคู่โดรนและรีโมทคอนโทรล หากผู้ใช้ไม่ได้เข้าสู่ระบบบัญชี Parrot. Cloud เขายังคงสามารถใช้การเชื่อมต่อ 4G กับบัญชีชั่วคราวที่ไม่ซ้ำกันได้ เมื่อใช้โครงสร้างพื้นฐานของ Parrot สำหรับการจับคู่ 4G วิดีโอจะได้รับการเข้ารหัสโดยใช้คีย์ที่ตกลงกันระหว่างโดรนและรีโมตคอนโทรล Parrot ไม่สามารถเข้าถึงวิดีโอที่ไม่ได้เข้ารหัสได้

สอดคล้องกับ FIPS140-2 และ CC EAL5 Secure Element
ANAFI Ai มีองค์ประกอบความปลอดภัย Wisekey ในตัวที่สอดคล้องกับ NIST ได้รับการรับรอง FIPS140-2 ระดับ 3 และ Common Criteria EAL5 องค์ประกอบความปลอดภัยที่คล้ายกันนั้นถูกสร้างไว้ในฮาร์ดแวร์ควบคุม Skycontroller 4 ด้วย
ฟังก์ชันองค์ประกอบความปลอดภัย:
- ดำเนินการเข้ารหัสลับ
- จัดเก็บและปกป้องข้อมูลที่เป็นความลับ
ใช้คีย์ส่วนตัว ECDSA พร้อมพารามิเตอร์โดเมน P521 ซึ่งไม่ซ้ำกันสำหรับโดรนแต่ละตัว ไม่สามารถแยกจากองค์ประกอบความปลอดภัย และใบรับรองที่เกี่ยวข้องกับคีย์นี้ได้รับการลงนามโดยผู้ออกใบรับรอง
Wisekey ปกป้องความสมบูรณ์ของเฟิร์มแวร์ ให้การระบุโดรนเฉพาะสำหรับการจับคู่ 4G และการตรวจสอบสิทธิ์ที่เข้มงวด และลายเซ็นดิจิทัลเฉพาะของภาพถ่ายที่ถ่ายโดยโดรน

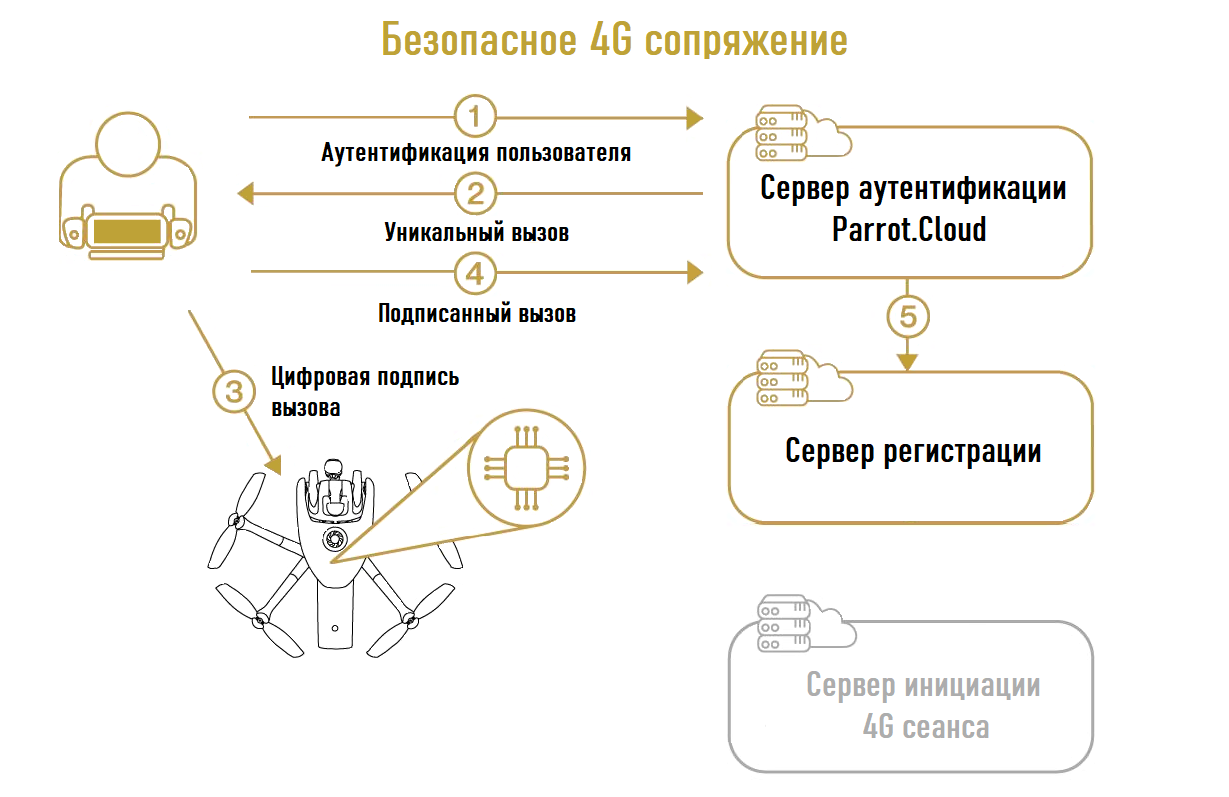
การเชื่อมต่อที่ปลอดภัย 4G และการรับรองความถูกต้องที่แข็งแกร่ง
กระบวนการจับคู่อุปกรณ์อย่างปลอดภัย ในระหว่างกระบวนการนี้ ผู้ใช้จะยืนยันได้อย่างน่าเชื่อถือว่าเขาเชื่อมต่อกับโดรนเฉพาะ ขอบคุณ ANAFI Ai Secure Element เขาสามารถทำได้โดยไม่ต้องป้อนรหัสผ่านภายในโดรน
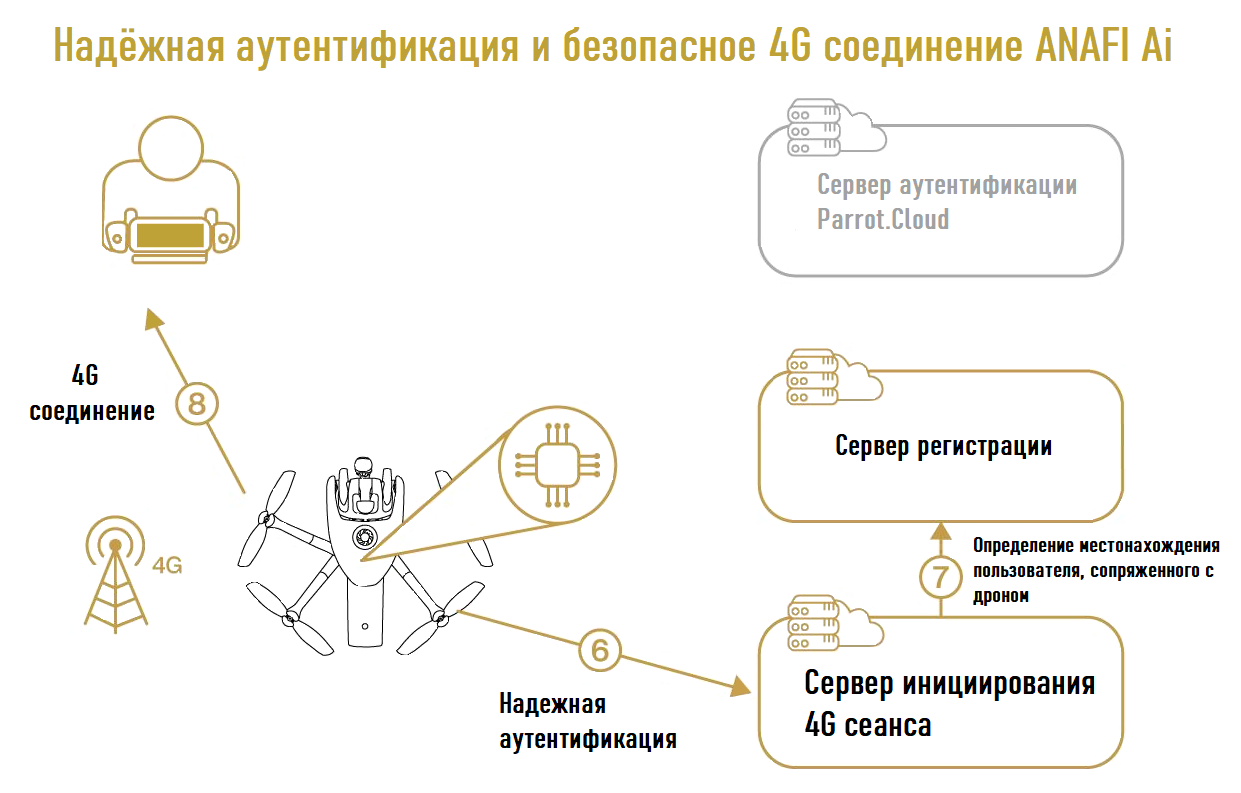
จากนั้นเซิร์ฟเวอร์ Parrot จะลงทะเบียนการสื่อสารระหว่างผู้ใช้กับโดรน เมื่อการเชื่อมต่อ Wi-Fi ระหว่างผู้ใช้กับโดรนขาดหาย ANAFI Ai จะสลับไปใช้การเชื่อมต่อ 4G โดยอัตโนมัติ ANAFI Ai ดำเนินการตรวจสอบสิทธิ์อย่างเข้มงวดบนเซิร์ฟเวอร์ Parrot โดยใช้คีย์ส่วนตัวที่จัดเก็บไว้ในองค์ประกอบความปลอดภัย เซิร์ฟเวอร์ Parrot ค้นหาผู้ใช้ที่เชื่อมต่อและมีอินเทอร์เฟซระหว่าง ANAFI Ai และ Skycontroller 4
เพื่อปกป้องการควบคุมเสียงพึมพำและสตรีมวิดีโอที่มาถึง Skycontroller 4 ANAFI Ai รองรับโปรโตคอล TLS, DTLS และ SRTP
การเริ่มต้นและการอัพเดทที่ปลอดภัย
ลำดับการบูตเครื่องบินได้รับการปกป้อง: ระบบตรวจสอบ ว่าใช้ซอฟต์แวร์ Parrot และซอฟต์แวร์นี้ไม่ได้ถูกดัดแปลงแก้ไข มีการตรวจสอบความปลอดภัยในการเริ่มต้นทุกครั้ง บริการอัปเดตยังควบคุมลายเซ็นดิจิทัลของการอัปเดตซอฟต์แวร์
การตั้งค่าคีย์ผู้ใช้บน Secure Element
ผู้ใช้ ANAFI Ai สามารถเข้าถึงบัญชีผู้ให้บริการพิเศษ Secure Element บัญชีนี้ใช้เพื่อตั้งค่าคีย์ที่เกี่ยวข้องกับผู้ใช้รายนี้ ผู้ใช้สามารถกำหนดค่าองค์ประกอบความปลอดภัยด้วยกุญแจสาธารณะของผู้ให้บริการภารกิจที่พวกเขาไว้วางใจ ANAFI Ai จะทำภารกิจที่ลงนามด้วยกุญแจเหล่านี้เท่านั้น กระบวนการนี้ป้องกันไม่ให้ผู้โจมตีทำภารกิจการบินที่เป็นอันตรายบนโดรน
ภาพถ่ายที่เซ็นชื่อแบบดิจิทัล
องค์ประกอบที่ปลอดภัยจาก ANAFI Ai สามารถเซ็นชื่อแบบดิจิทัลด้วยภาพโดรน ลายเซ็นนี้เป็นเครื่องพิสูจน์ว่า
- รูปภาพพร้อมลายเซ็นดังกล่าวถ่ายโดยเครื่องบินไร้คนขับที่ระบุ
- ทั้งภาพเองและข้อมูลเมตาไม่ได้รับการประมวลผล (โดยสมัครใจหรือไม่) - ข้อมูลเมตาหรือที่เรียกว่า EXIF และ XMP มีข้อมูลเกี่ยวกับวันที่ เวลา และตำแหน่งของภาพ

กล่าวอีกนัยหนึ่ง ลายเซ็นดิจิทัลปกป้องข้อมูลทั้งหมดที่เกี่ยวข้องกับภาพ รวมถึงสถานที่และเวลาที่ถ่าย และ ANAFI Ai โดรนตัวใด
ผู้ใช้และพันธมิตรที่เสนอโซลูชั่นซอฟต์แวร์โดยใช้การถ่ายภาพโดรนสามารถตรวจสอบลายเซ็นดิจิทัลของภาพถ่าย ANAFI Ai ด้วยใบรับรองโดรนหรือผ่านแคตตาล็อกคีย์สาธารณะที่ Parrot ให้มา
ตรวจสอบความโปร่งใสและความปลอดภัยอย่างต่อเนื่องด้วย Bug Bounty
Parrot ใช้โปรโตคอลมาตรฐานและรูปแบบไฟล์ทุกครั้งที่ทำได้ ไม่มีโค้ดที่สร้างความสับสนหรือคุณสมบัติที่ซ่อนอยู่ ซึ่งช่วยให้ผู้ใช้สามารถเข้าใจวิธีการทำงานของผลิตภัณฑ์ Parrot และทดสอบความปลอดภัยได้ นอกจากนี้ OpenFlight ซอฟต์แวร์ที่ใช้ควบคุมโดรน ยังเป็นโอเพ่นซอร์ส ซึ่งทำให้ผู้ใช้ควบคุมได้อย่างสมบูรณ์
ในเดือนเมษายน พ.ศ. 2564 Parrot ได้เปิดตัว Bug Bounty Program กับ YesWeHack ซึ่งเป็นแพลตฟอร์มรักษาความปลอดภัยแบบ crowdsource แห่งแรกของยุโรป Parrot ใช้ประโยชน์จากชุมชนการวิจัยความปลอดภัยทางไซเบอร์ขนาดใหญ่ของ YesWeHack เพื่อระบุช่องโหว่ที่อาจเกิดขึ้นในโดรน แอพมือถือ และบริการเว็บผ่านความร่วมมือนี้
โปรแกรม Bug Bounty ประกอบด้วยสองขั้นตอน:
โปรแกรมส่วนตัวในขั้นต้นให้การเข้าถึงเฉพาะนักวิจัยด้านความปลอดภัยที่เลือกและรวมถึงรุ่นโดรนนกแก้วในอนาคตประสบการณ์และทักษะที่หลากหลายของนักวิจัยจะยืนยันความปลอดภัยระดับสูงของผลิตภัณฑ์ก่อนออกสู่ตลาด ซึ่งจะช่วยปรับปรุงความปลอดภัยของผู้ใช้ Parrot และการปกป้องข้อมูลของพวกเขา
หลังจากรอบแรกของโปรแกรม Bug Bounty ส่วนตัวและหลังการขาย ผลิตภัณฑ์จะเข้าสู่โปรแกรมสาธารณะ ความปลอดภัยของพวกเขาได้รับการตรวจสอบอย่างเข้มงวดโดยชุมชน YesWeHack ทั้งหมดที่มีนักวิจัยด้านความปลอดภัยทางไซเบอร์มากกว่า 22,000 คน

การจัดการข้อมูล
Parrot Cloud ช่วยให้ผู้ใช้ที่เลือกแชร์ข้อมูลเพื่อจัดการข้อมูลเที่ยวบินและฝูงบิน ตลอดจนมัลติมีเดีย ข้อมูลที่ได้รับจากโดรนของพวกเขา
ข้อมูลที่รวบรวม
Parrot Cloud รวบรวมข้อมูล 4 ประเภท:
คงที่ (ข้อมูลผลิตภัณฑ์):
- เครื่องบิน หมายเลขซีเรียล
- หมายเลขซีเรียลของแบตเตอรี่
- รุ่นเฟิร์มแวร์ของเครื่องบินและแบตเตอรี่
- รุ่นฮาร์ดแวร์เครื่องบินและแบตเตอรี่
- รุ่นอุปกรณ์
- FreeFlight 7 Release เวอร์ชัน
เหตุการณ์
- การแจ้งเตือน: Battery, Autopilot, Sensors
- การสื่อสาร: เชื่อมต่อ / ตัดการเชื่อมต่อ, เริ่มการสตรีม, การแจ้งเตือนการรบกวน, สัญญาณอ่อน
- กล้อง: สถิติการสตรีม, การเปลี่ยนแปลงการตั้งค่า
- เที่ยวบิน: การเปลี่ยนสถานะ (การขึ้นเครื่องบิน, การลงจอด, โฉบ ฯลฯ), การเปิดใช้งานเที่ยวบิน (แผนการบิน, photogrammetry)
"ภาพตามบริบท"
- ไทม์แลปส์- สแนปชอต และ (ทุกๆ 2 นาที)
- Deep Learning (การทำแผนที่วัตถุมากขึ้น ภูมิทัศน์เพื่อปรับปรุงความเป็นอิสระในการบิน การติดตาม การหลีกเลี่ยงสิ่งกีดขวาง)
- Stereovision (แผนที่เชิงลึก)
- ภาพที่เรียก โดยเหตุการณ์
- เริ่มต้นและสิ้นสุดของคำสั่งโฮเวอร์ที่แม่นยำ, การลงจอดที่แม่นยำ
- ความผิดพลาดของเสียงหึ่งๆ
- ใบหน้าจะเบลอโดยอัตโนมัติระหว่างการส่ง
Telemetry
การจัดการการบำรุงรักษา
การบำรุงรักษาเชิงป้องกัน: เครื่องมือของเรารวบรวมข้อมูลทั้งหมดที่เกี่ยวข้องกับภารกิจ (ประเภทภารกิจ เวลาบินขึ้นและลงจอด จำนวนภารกิจ ตำแหน่งโดรน ความเร็วในการบิน แผนการบินและการตั้งค่า AirSDK) สิ่งนี้ช่วยให้คุณได้รับข้อมูลที่ถูกต้องเกี่ยวกับสถานะของฝูงบินโดรน ANAFI Ai (รวมถึงตัวควบคุมและแบตเตอรี่) แบบเรียลไทม์
การบำรุงรักษาเชิงแก้ไข: ข้อมูลที่เก็บรวบรวมมีประโยชน์สำหรับการระบุสถานะของโดรนหรือแบตเตอรี่โดยเฉพาะอย่างรวดเร็ว
การเสริมปัญญาประดิษฐ์ (AI)
องค์ประกอบ AI ของ ANAFI Ai (PeleeNet, เครือข่ายที่บิดเบี้ยว ฯลฯ) มอบบริการและคุณสมบัติที่ยอดเยี่ยมแก่ผู้ใช้: การหลีกเลี่ยงอุปสรรค, การติดตามเป้าหมาย, โหมดการบินหลายโหมด คุณภาพของ AI ขึ้นอยู่กับปริมาณและคุณภาพของข้อมูลที่รวบรวม (รูปภาพและวิดีโอ): ข้อมูลนี้จะดึงข้อมูลการเรียนรู้ของเครื่อง ในแง่นี้ คุณภาพของข้อมูลไม่ใช่องค์ประกอบที่ชี้ขาดเพียงอย่างเดียว: ข้อมูลเมตาที่เกี่ยวข้องกับข้อมูลนี้เป็นพื้นฐานเช่นกัน ด้วยเหตุนี้ เครื่องมือของเราจึงรวบรวมรูปภาพและข้อมูลเมตาเป็นประจำและขึ้นอยู่กับเหตุการณ์ รวมเป็น 30 ถึง 50 MB ต่อนาที
ลักษณะการบิน
ลักษณะอากาศพลศาสตร์
ไดรฟ์และอากาศพลศาสตร์
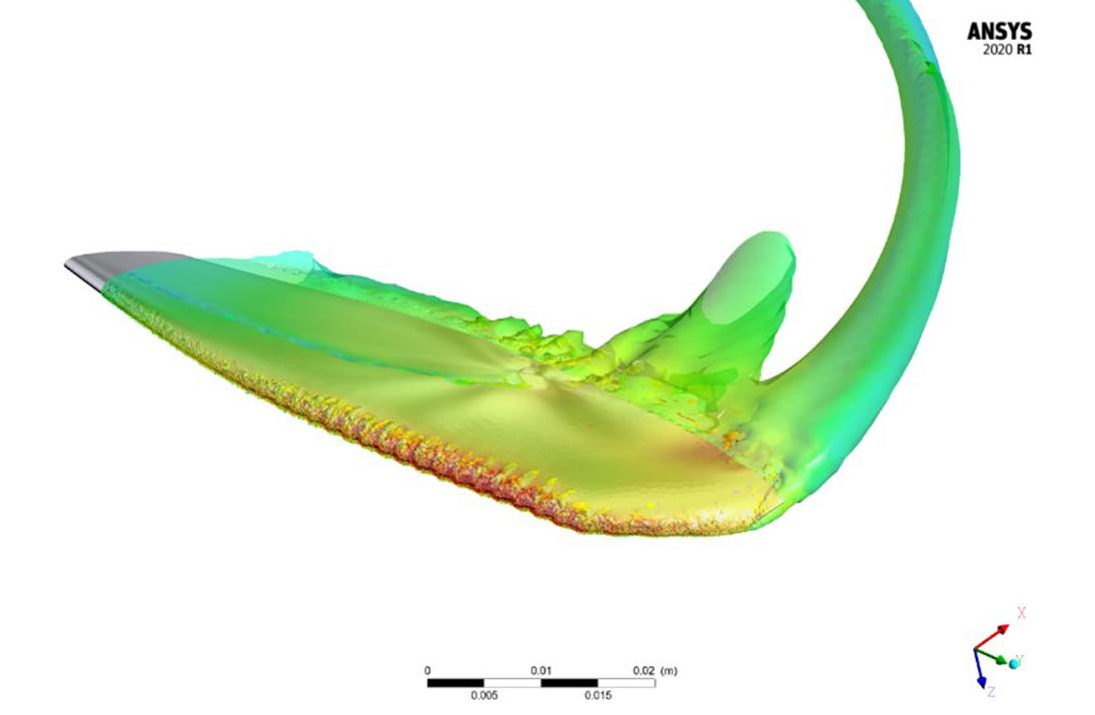 ภาพ CFD ของใบพัด ANAFI Ai
ภาพ CFD ของใบพัด ANAFI Ai
ใบพัด biomimicry ใหม่ที่มีปลาวาฬหน้าเหมือนหลังค่อม วิธีนี้ทำให้สามารถเพิ่มประสิทธิภาพการขับเคลื่อนของโรงไฟฟ้าได้ ซึ่งที่เอาต์พุตจะเพิ่มแรงขับที่ความเร็วรอบเท่ากัน เอฟเฟกต์นี้เปรียบได้กับการเพิ่มเส้นผ่านศูนย์กลางของโรเตอร์
เสียงรบกวนโดยเฉพาะโทนเสียงที่เล็ดลอดออกมาจากขอบชั้นนำก็ลดลงเช่นกัน ดังนั้น ANAFI Ai จึงเงียบกว่า [71.5 dB SPL (A) ที่ 1 ม.] กว่า Skydio 2 [76.4 dB SPL (A) ที่ 1 ม.]
- เวลาบินมากกว่า 32 นาที
- ด้วยคุณสมบัติแอโรไดนามิกที่ดีที่สุดของลำตัวและระบบขับเคลื่อน ANAFI Ai ความเร็วสูงสุดในการบินไปข้างหน้าคือ 61 กม. / ชม. ด้วย เที่ยวบินด้านข้างและเที่ยวบินย้อนกลับ 58 กม. / ชม
- แม็กซ์ ความต้านทานลม 12.7 m / s
- ด้วยประสิทธิภาพแรงบิดสูงของมอเตอร์ / ใบพัดและความเป็นอิสระของแบตเตอรี่สูงช่วงคือ 22.5 กม. (ที่ความเร็วคงที่ 50 กม. / ชม. ในสภาพอากาศสงบ)
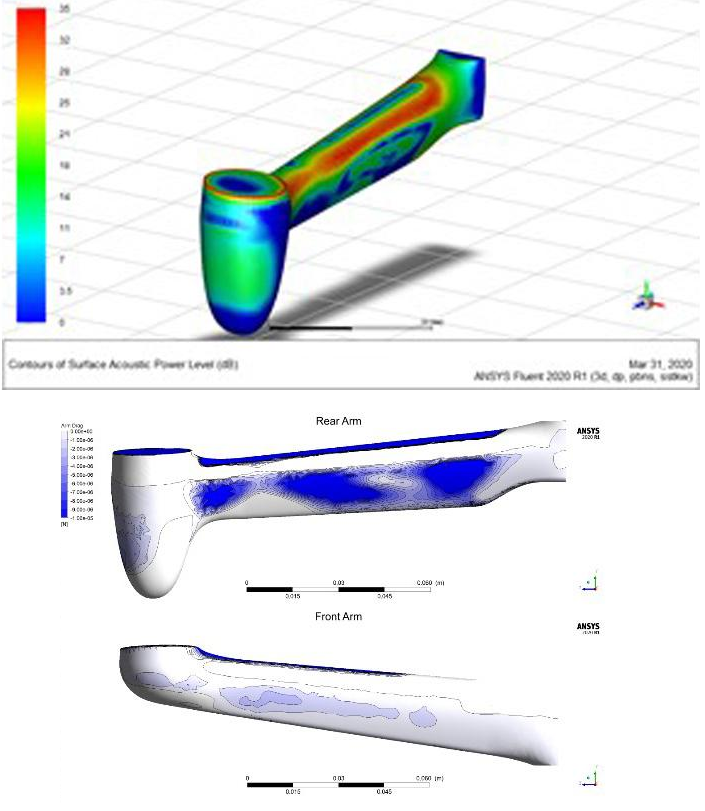 ภาพ CFD ของคาน ANAFI Ai
ภาพ CFD ของคาน ANAFI Ai
เซ็นเซอร์
เพื่อความปลอดภัยในการบิน ANAFI Ai มาพร้อมกับ:
- 2 × IMU (ICM-40609-D และ ICM42605)
- Magnetometer LIS2MDL
- โมดูล GPS UBX-M8030
- TI OPT3101 เวลาบิน (ToF)
- บารอมิเตอร์ LPS22HB
- กล้องแนวตั้ง
ลักษณะเซนเซอร์
)IMU เที่ยวบิน: ICM-40609-D
- ไจโรสโคป 3 แกน
- ช่วง: ± 2000 ° / s
- ความละเอียด: 16.4 LSB / ° / s
- ออฟเซ็ต / ความแม่นยำ: ± 0.05 ° / s (หลังจากการสอบเทียบทางความร้อนและไดนามิก)
- มาตรความเร่ง 3 แกน
- ช่วง: ± 16g
- ความละเอียด: 2.048 LSB / mg
- ออฟเซ็ต / ความแม่นยำ: ± 0.5 มก. (XY) ± 1 มก. (Z) (หลังการปรับเทียบความร้อนและไดนามิก)
- การควบคุมอุณหภูมิ s: ระบบทำความร้อนที่ควบคุมโดยสัมพันธ์กับอุณหภูมิแวดล้อม เสถียรภายใน: ± 0.15 ° C
- ความถี่ในการวัด: 2 kHz
เครื่องวัดค่าความเข้มข้นของสนามแม่เหล็ก: LIS2MDL
(11191) ช่วง: ± 49.152G
บารอมิเตอร์: LPS22HB 1
- ช่วง: 260 ถึง 1260 hPa
- ความละเอียด: 0.0002 hPa
- ออฟเซ็ต / ความแม่นยำ: ± 0.1 hPa
- การควบคุมอุณหภูมิ: ระบบทำความร้อนที่ควบคุมโดยสัมพันธ์กับอุณหภูมิแวดล้อม เสถียรภายใน: ± 0.2 ° C
- ความถี่ในการวัด: 75 Hz
- เสียงรบกวนจากการวัด: 20 ซม. RMS
GNSS: UBX-M8030 1
- เสาอากาศแพทช์เซรามิก 25 × 25 × 4 มม. ช่วยให้ได้รับการปรับปรุง 2 dB มากกว่า ANAFI 1
- ความไว: เริ่มเย็น -148 dBm / การติดตามและการนำทาง: -167 dBm
- เวลาในการแก้ไขครั้งแรก: 40 วินาที
- ความแม่นยำ / ความแม่นยำ: ตำแหน่ง (ส่วนเบี่ยงเบนมาตรฐาน 1.4 ม.), ความเร็ว (ส่วนเบี่ยงเบนมาตรฐาน 0.5 ม. / วินาที)
กล้องแนวตั้ง
- เซ็นเซอร์ภาพ รูปแบบ: 1/6 นิ้ว
- ความละเอียด: 640 × 480 พิกเซล
- เซ็นเซอร์ภาพพร้อมชัตเตอร์ทั่วโลก
- ขาวดำ
- FOV: มุมมองแนวนอน: 53.7 ° / มุมมองแนวตั้ง: 41.5 °
- ความยาวโฟกัส: 2.8 มม.
- วัดความเร็วของการไหลของแสงบนพื้นดินที่ 60 Hz
- 15Hz & ความพอดี @ 5Hz
ToF: TI OPT3101
- ช่วง: 0-15 ม.
- ความละเอียด: 0.3 มม.
- ความแม่นยำ b: ± 2 ซม. (หลังการปรับเทียบ)
- ความถี่ในการวัด: 64 Hz
กล้องแนวตั้ง IMU: ICM-42605
- ) ไจโรสโคป 3 แกน
- ช่วง: ± 2000 ° / s
- ความละเอียด: 16.4 LSB / ° / s
- ออฟเซ็ต / ความแม่นยำ: ± 0.1 ° / s (หลังไดนามิก) การสอบเทียบ)
- 3-Axis Accelerometer
- ช่วง: ± 16g
- ความละเอียด: 2.048 LSB / mg
- ออฟเซ็ต / ความแม่นยำ: ± 2.0 มก. (XY) ± 5.0 มก. (Z) - หลังการปรับเทียบแบบไดนามิก
- ความถี่ในการวัด: 1 kHz
- การซิงโครไนซ์ฮาร์ดแวร์กับกล้องแนวตั้ง ความแม่นยำ: 1 μs
Autopilot
ANAFI Ai Flight Controller ให้การขับที่ง่ายและใช้งานง่าย: ไม่จำเป็นต้องมีการฝึกอบรมในการใช้งานช่วยให้คุณสามารถปรับโหมดการบินได้หลายแบบโดยอัตโนมัติ (Flight Plan, Cameraman, Hand take-off, Smart RTH) อัลกอริธึมฟิวชั่นเซ็นเซอร์รวมข้อมูลจากเซ็นเซอร์ทั้งหมดเพื่อประเมินอัตราส่วน ANAFI Ai ความสูง ตำแหน่งและความเร็ว
การประเมินสภาพเป็นสิ่งจำเป็นสำหรับการทำงานที่เหมาะสมของโดรน Quadcopters นั้นไม่เสถียรโดยเนื้อแท้เมื่อใช้ตัวควบคุมการบินกับลูปเปิด เพื่อควบคุมพวกมันได้อย่างง่ายดาย ไม่ต้องพูดถึงการควบคุมอัตโนมัติ จำเป็นต้องทำให้พวกมันเสถียรโดยใช้อัลกอริธึมการควบคุมแบบวงปิด อัลกอริธึมเหล่านี้คำนวณและส่งคำสั่งไปยังมอเตอร์ที่ ANAFI Ai ต้องการเพื่อให้ได้วิถีที่ต้องการ

เที่ยวบินในร่ม
ในกรณีที่ไม่มีสัญญาณ GPS ANAFI Ai อาศัยการวัดของกล้องแนวตั้งเป็นหลักเพื่อประเมินความเร็วและตำแหน่ง ประสิทธิภาพของกล้องแนวตั้งถูกกำหนดโดยสองอัลกอริธึมหลัก:
- การไหลของแสงสำหรับการประมาณความเร็ว
- การตรวจจับจุดสำคัญและการจับคู่สำหรับการประมาณตำแหน่ง
กล้องแนวตั้ง อัลกอริธึมสามารถทำงานได้ในสภาพแสงน้อยด้วย ANAFI Ai ที่ติดตั้งไฟ LED คู่หนึ่งซึ่งอยู่ติดกับกล้องแนวตั้ง ช่วยให้โดรนยังคงทรงตัว โดยเฉพาะอย่างยิ่งเมื่อบินในอาคารหรือในกรณีที่ไม่มี GPS ที่ระดับความสูงน้อยกว่า 5 เมตรเหนือพื้นดิน พลังของไฟ LED จะปรับโดยอัตโนมัติ ขึ้นอยู่กับความต้องการของอัลกอริทึม
เที่ยวบินอัตโนมัติ
คุณสมบัติหลัก
- ระบบตรวจจับการหมุนพร้อมมุมมองกว้าง
- ) การแยกความลึกของพื้นที่โดยรอบตามการจัดตำแหน่งสเตอริโอและความลึกโดยการเคลื่อนไหว
- การเป็นตัวแทนของสภาพแวดล้อมในรูปแบบของตารางการเติม
- การตรวจจับและการหลีกเลี่ยงสิ่งกีดขวางอัตโนมัติที่ ความเร็วสูงสุด 29 กม. / ชม.
บทนี้ให้รายละเอียดเกี่ยวกับเซ็นเซอร์ ฮาร์ดแวร์ และอัลกอริธึมที่ ANAFI Ai ใช้เพื่อเปิดใช้งานการบินอัตโนมัติ มีการจัดระเบียบดังนี้:
- คำอธิบายโดยละเอียดของระบบการรับรู้ ANAFI Ai
- อัลกอริธึมการรับรู้ที่ใช้ในการสร้างสภาพแวดล้อม 3 มิติรอบ ๆ โดรน
- การจัดกำหนดการใหม่และสิ่งกีดขวาง หลีกเลี่ยง

กลยุทธ์ระบบการรับรู้
การรับรู้ถึงสภาพแวดล้อมสามมิติเป็นความสามารถหลักในการบินอัตโนมัติ โดยเฉพาะในพื้นที่จำกัด เป็นข้อกำหนดเบื้องต้นสำหรับการรับประกันการตรวจจับและการหลีกเลี่ยงสิ่งกีดขวาง ซึ่งช่วยลดภาระของผู้ควบคุมโดรน เพิ่มความสำเร็จในภารกิจ และรับรองความปลอดภัยของเครื่องบิน
การปลดปล่อยศักยภาพของกล้องบินได้อย่างเต็มที่ ซึ่งสามารถเคลื่อนที่และหมุนได้อย่างอิสระในทุกทิศทางโดยไม่มีข้อจำกัด ต้องใช้โซลูชันการตรวจจับที่มีประสิทธิภาพโดยเฉพาะอย่างยิ่ง ระบบตรวจจับควรสามารถรับข้อมูลเกี่ยวกับสภาพแวดล้อมในทิศทางที่สอดคล้องกับการเคลื่อนที่ไปข้างหน้าในเที่ยวบิน โดยไม่คำนึงถึงทิศทางของกล้อง
ANAFI Ai อาศัยโซลูชันทางเทคนิคที่ไม่เหมือนใครโดยใช้แกนกันสั่นสองอันเพื่อแยกการวางแนวของกล้องหลักและระบบตรวจจับ:
- กล้องหลักติดตั้งบน 3- แกน gimbal ทำให้การวางแนว 3 มิติไม่ขึ้นกับทิศทางของโดรน
- ระบบตรวจจับถูกติดตั้งบน gimbal แกนเดียว - เชื่อมต่อกับการเคลื่อนไหวหันเหของโดรน สามารถปรับทิศทางได้ในทุกทิศทาง
 ANAFI Ai ตัวกันโคลงคู่สำหรับการรับรู้และการมองเห็น
ANAFI Ai ตัวกันโคลงคู่สำหรับการรับรู้และการมองเห็น
แกนเอียงของไม้แขวนสองอันเป็นแบบ collinear และรวมกันเพื่อให้ได้การออกแบบที่กะทัดรัดเป็นพิเศษ
ด้วยวิธีนี้ จึงสามารถกำหนดทิศทางของกล้องหลักและระบบตรวจจับได้ในสองทิศทางที่แตกต่างกัน การออกแบบนี้หลีกเลี่ยงการใช้กล้องราคาแพงที่ด้านข้าง ด้านบน ด้านล่าง และด้านหลังของโดรน ในขณะที่ยังคงให้ขอบเขตการมองเห็นที่กว้างสำหรับระบบตรวจจับ
ส่วนนี้จัดเป็นดังนี้:
- รายละเอียดของเซ็นเซอร์ที่ใช้สำหรับระบบตรวจจับ
- ข้อกำหนดสำหรับทั้ง gimbal ของกล้องหลักและ gimbal ระบบตรวจจับ
- กลยุทธ์สำหรับการกำหนดเป้าหมายระบบตรวจจับเพื่อใช้ประโยชน์จากศักยภาพของโครงสร้างกันสะเทือนแบบคู่
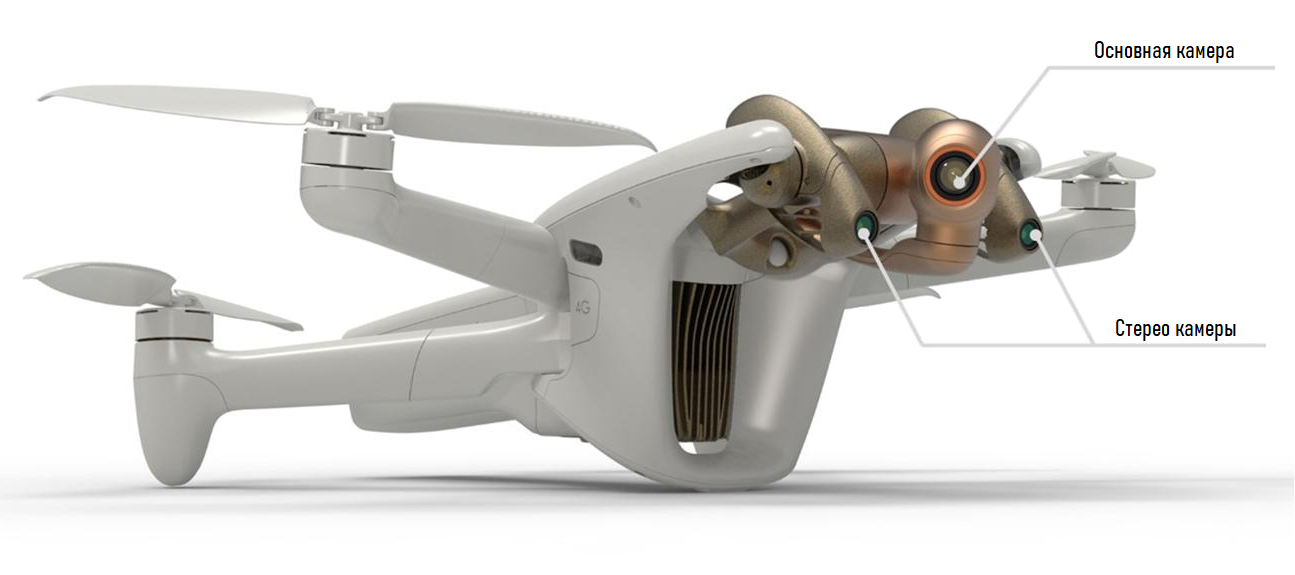
เซนเซอร์
ระบบตรวจจับมีพื้นฐานอยู่บนคู่ ของกล้องเดียวกันที่มีแกนพิทช์เดียว...
 บานพับแบบกลไก 1 แกนสำหรับระบบตรวจจับ ANAFI Ai
บานพับแบบกลไก 1 แกนสำหรับระบบตรวจจับ ANAFI Ai
ข้อมูลจำเพาะของเซ็นเซอร์มีดังนี้
- รุ่น: Onsemi AR0144CSSM28SUD20
- สี: ขาวดำ
- ความละเอียด: 1280 × 800 พิกเซล
- อัตราเฟรม: 30 fps
- ชัตเตอร์ทั่วโลก
- มุมมองภาพแนวนอนแบบเต็ม: 118 ° (110 °ใช้งานได้สำหรับการตรวจจับ)
- มุมมองภาพแนวตั้งแบบเต็ม: 72 ° (62 ° สำหรับการตรวจจับ)
- ความยาวโฟกัส: 1.47 มม. (0.039 นิ้ว - 492.94610 พิกเซล)
- รูรับแสง: f / 2.7
stereopairs มีดังนี้:
- Common Pitch Axis
- พื้นฐาน / ระยะทาง: 62 มม. (2.44 นิ้ว)
- จับภาพแบบซิงโครนัสที่ 30 fps

Dual Gimbal
แกนกันสั่นกลของกล้องหลักคือระยะพิทช์แบบกลไก 3 แกน l-yaw "ด้วยคุณสมบัติดังต่อไปนี้:
- Pitch Limiters: -116 ° / 176 °
- ตัว จำกัด ม้วน: / - 36 °
- ตัว จำกัด การหันเห: / - 48 °
ระบบกันสะเทือนทางกลของระบบตรวจจับเป็นระบบกันสะเทือนแบบแกนเดียวที่มีคุณสมบัติดังต่อไปนี้:
- จุดสิ้นสุดในระยะห่าง: -107 ° / 204 °
- เวลาเดินทางจากปลายด้านหนึ่งไปยังอีกจุดหนึ่ง: 300 ms
ระบบตรวจจับมีการเดินทาง 311 ° (ซึ่ง 296 °ไม่ได้ถูกปกปิดโดยตัวโดรน) ซึ่งช่วยให้ การรับรู้ย้อนหลัง
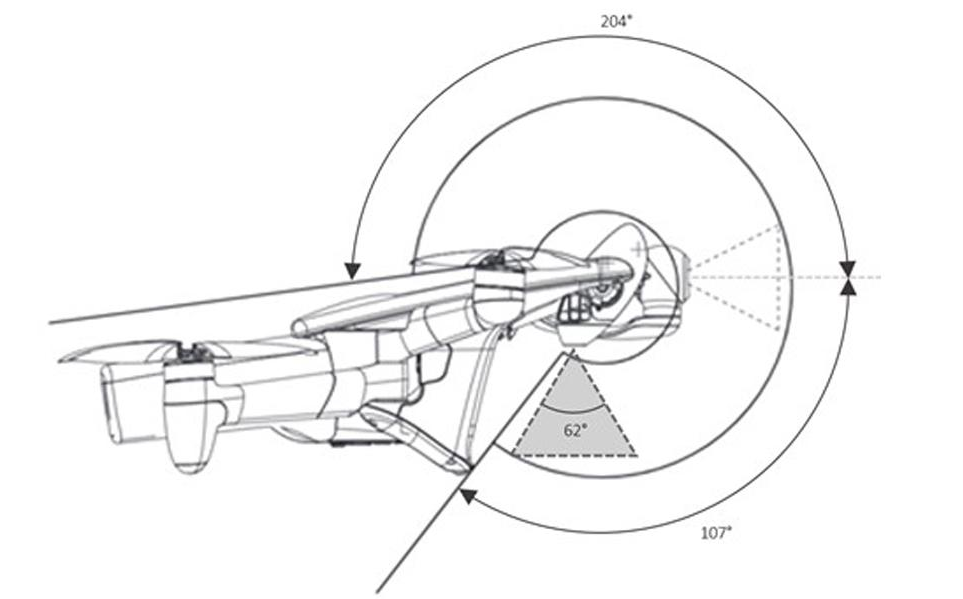
มุมมองแนวตั้งทันทีและระบบการจำกัดการรับรู้ ANAFI Ai.
ระบบได้รับการออกแบบในลักษณะที่:
- ใบพัดไม่เข้าสู่มุมมองของกล้องหลัก
- หลัก กล้องไม่ครอบคลุมขอบเขตการมองเห็นของระบบการรับรู้
- กล้องหลักและระบบตรวจจับสามารถพับกลับได้เต็มที่ เพื่อป้องกันเลนส์
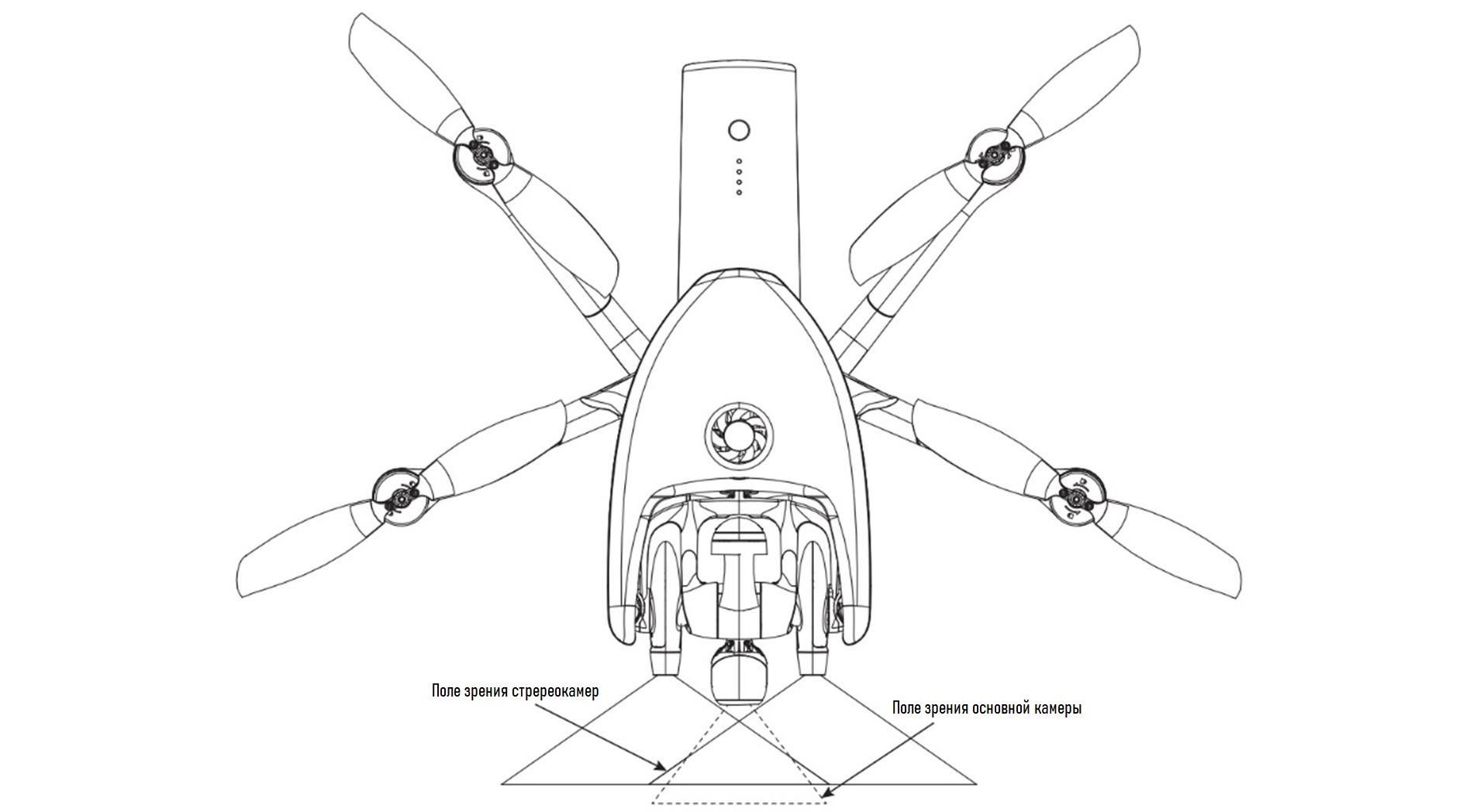 มุมมองแนวนอนของระบบการรับรู้ ANAFI Ai
มุมมองแนวนอนของระบบการรับรู้ ANAFI Ai
เมื่อเอนหลัง ระบบการรับรู้จะเคลื่อนไปยังตำแหน่งบนสุด ซึ่งจะทำให้มองเห็นได้ชัดเจน
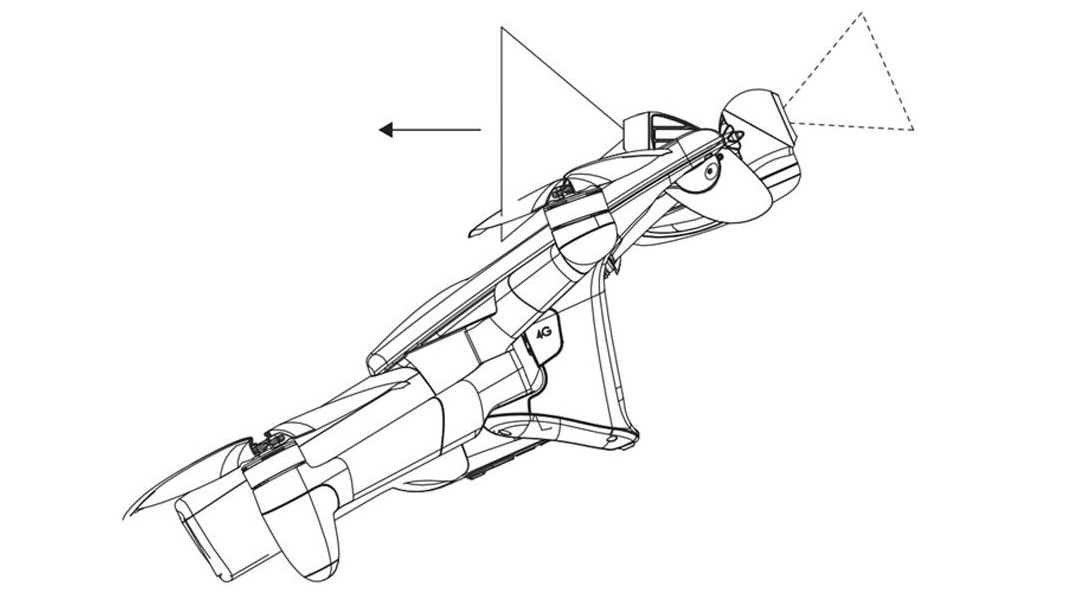
การรับรู้ของ ANAFI Ai ในตำแหน่งเอนหลังอย่างเต็มที่สำหรับเที่ยวบินย้อนกลับ
การสร้างสภาพแวดล้อมขึ้นใหม่
การสร้างสภาพแวดล้อมสามมิติโดยรอบขึ้นใหม่สำหรับการบินอัตโนมัติจะดำเนินการในสองขั้นตอน:
- ดึงข้อมูลความลึกจากการรับรู้ในรูปแบบของแผนที่ความลึก
- การรวมข้อมูลแผนที่ความลึกลงในตารางการเติมสามมิติ
ใช้สองวิธีเพื่อรับแผนที่ความลึกจากเซ็นเซอร์การรับรู้:
- ความลึกตามการจัดตำแหน่งสเตอริโอ
- ความลึกจากการเคลื่อนไหว
ความลึกจากการรองรับสเตอริโอ
วิธีหลักในการดึงความลึก ข้อมูลจะขึ้นอยู่กับพารัลแลกซ์ระหว่างกล้องสเตอริโอสองตัวของระบบการรับรู้ โดยการถ่ายภาพสภาพแวดล้อมในทิศทางเดียว แต่จากสองตำแหน่งที่แตกต่างกัน วัตถุในมุมมองของระบบการรับรู้จะปรากฏในตำแหน่งต่างๆ ในภาพที่ได้จากกล้องสองตัว ยิ่งวัตถุอยู่ใกล้ ตำแหน่งก็ยิ่งต่างกัน
ดังนั้น กลยุทธ์คือการกำหนดจุดในภาพที่ได้จากกล้องสเตอริโอซ้ายและขวาที่สอดคล้องกับวัตถุเดียวกันในด้านการมองเห็นของระบบตรวจจับ และวัดความแตกต่างในตำแหน่งของสิ่งเหล่านี้ จุดในสองภาพ ความแตกต่างนี้เรียกว่าความเหลื่อมล้ำและวัดจากจำนวนพิกเซล
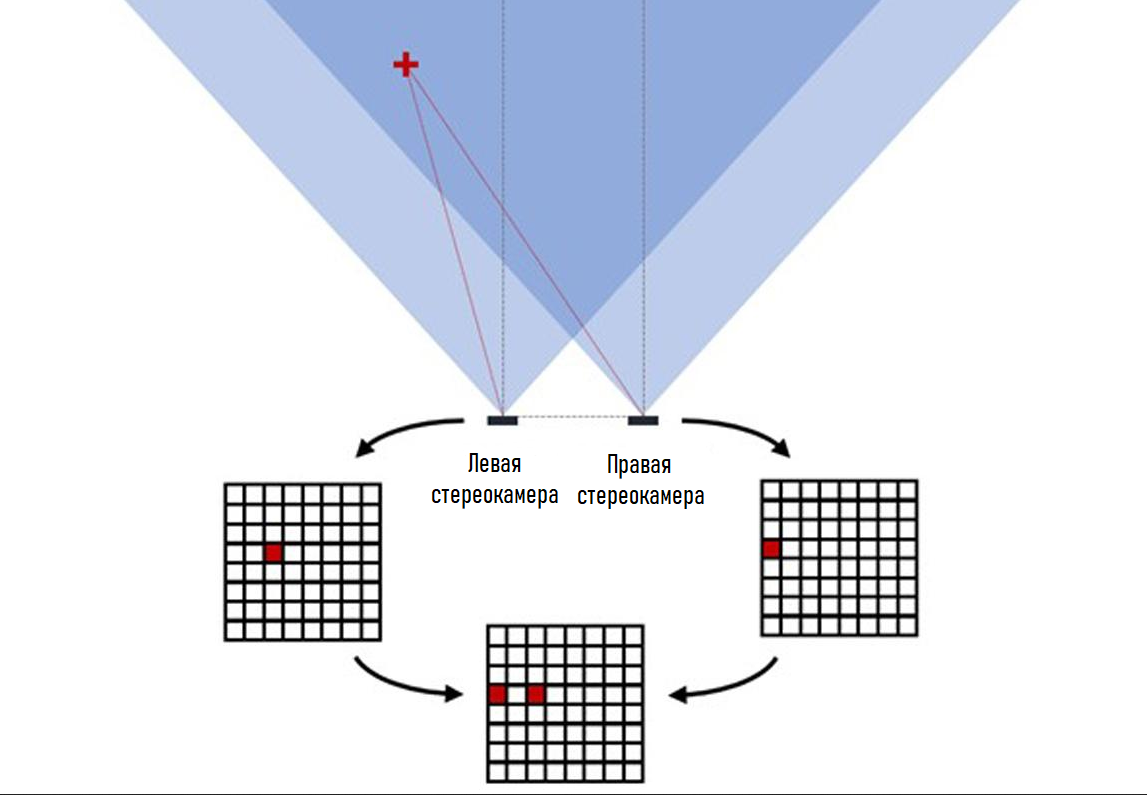 ภาพประกอบของหลักการของการมองเห็นแบบสเตอริโอ - จุด 3D สีแดงอยู่ในตำแหน่งต่างๆ ในภาพด้านซ้ายและขวา
ภาพประกอบของหลักการของการมองเห็นแบบสเตอริโอ - จุด 3D สีแดงอยู่ในตำแหน่งต่างๆ ในภาพด้านซ้ายและขวา
จากนั้นความเหลื่อมล้ำสามารถสัมพันธ์กับความลึกของแต่ละจุดเหล่านี้ได้โดยใช้ความสัมพันธ์ ความลึก = โฟกัส * เส้นฐาน / ความไม่เท่าเทียมกัน โดยที่ความลึกและเส้นฐานแสดงอยู่ในหน่วยเดียวกัน และจุดโฟกัส ความยาวและความเหลื่อมล้ำแสดงเป็นจำนวนพิกเซล
ผลลัพธ์ของการคำนวณจะอยู่ในรูปแบบของแผนที่ความลึก 176 × 90 พิกเซล ซึ่งค่าของแต่ละพิกเซลสอดคล้องกับความลึกเป็นเมตร แผนที่ความลึกจะรีเฟรชที่ 30 Hz
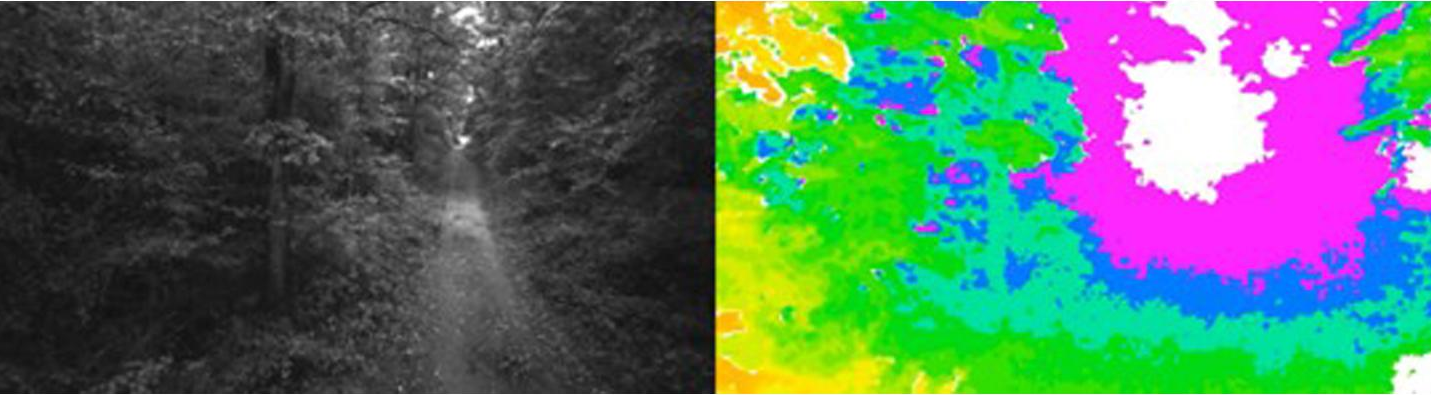
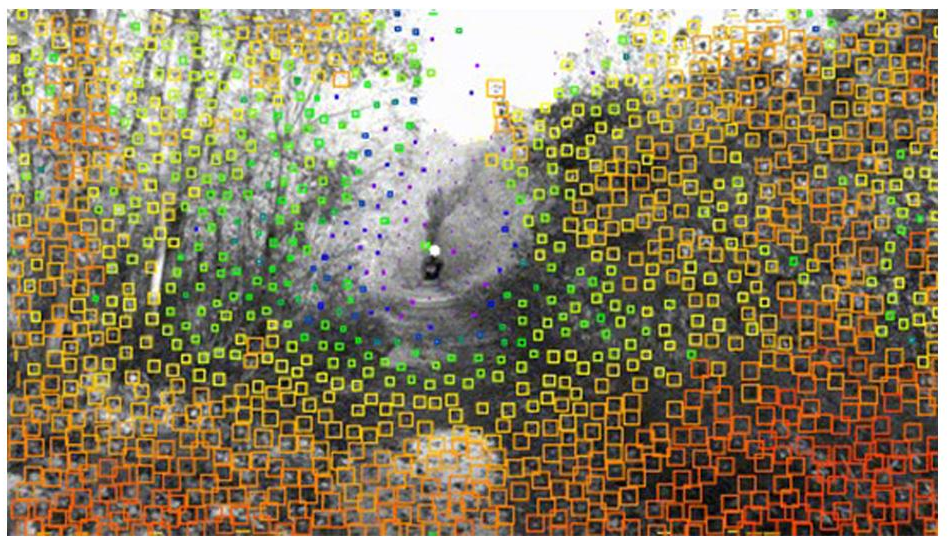
ตัวอย่างภาพที่ถ่ายด้วยกล้องด้านขวาของระบบตรวจจับ ANAFI Ai (ซ้าย) และความลึกที่เกี่ยวข้องที่ได้รับโดยใช้การถ่ายภาพสเตอริโอ (ขวา) แผนที่สีเปลี่ยนจากสีแดง (ใกล้) เป็นสีม่วง (ไกลกว่า) - สีขาวหมายถึง Out of Reach
ผลลัพธ์ทันทีของสิ่งนี้คือความลึกที่วัดโดยวิธีนี้แยกจากกันเนื่องจากความเหลื่อมล้ำสามารถรับเฉพาะค่าที่ไม่ต่อเนื่อง (จำนวนพิกเซล) จุด 3 มิติที่อยู่ไกลพอจากระบบการรับรู้และสร้างความแตกต่างทางทฤษฎีน้อยกว่าหนึ่งพิกเซลจะถือเป็นอนันต์ เนื่องจากความต่างที่ไม่ต่อเนื่องจริงที่สอดคล้องกันจะเท่ากับ 0 ความแม่นยำของวิธีเปรียบเทียบสเตอริโอจะลดลงตามระยะทางที่เพิ่มขึ้น แม้ว่าจะมี เป็นวิธีที่สามารถลดปรากฏการณ์นี้ได้โดยการสุ่มตัวอย่างพิกเซลย่อย
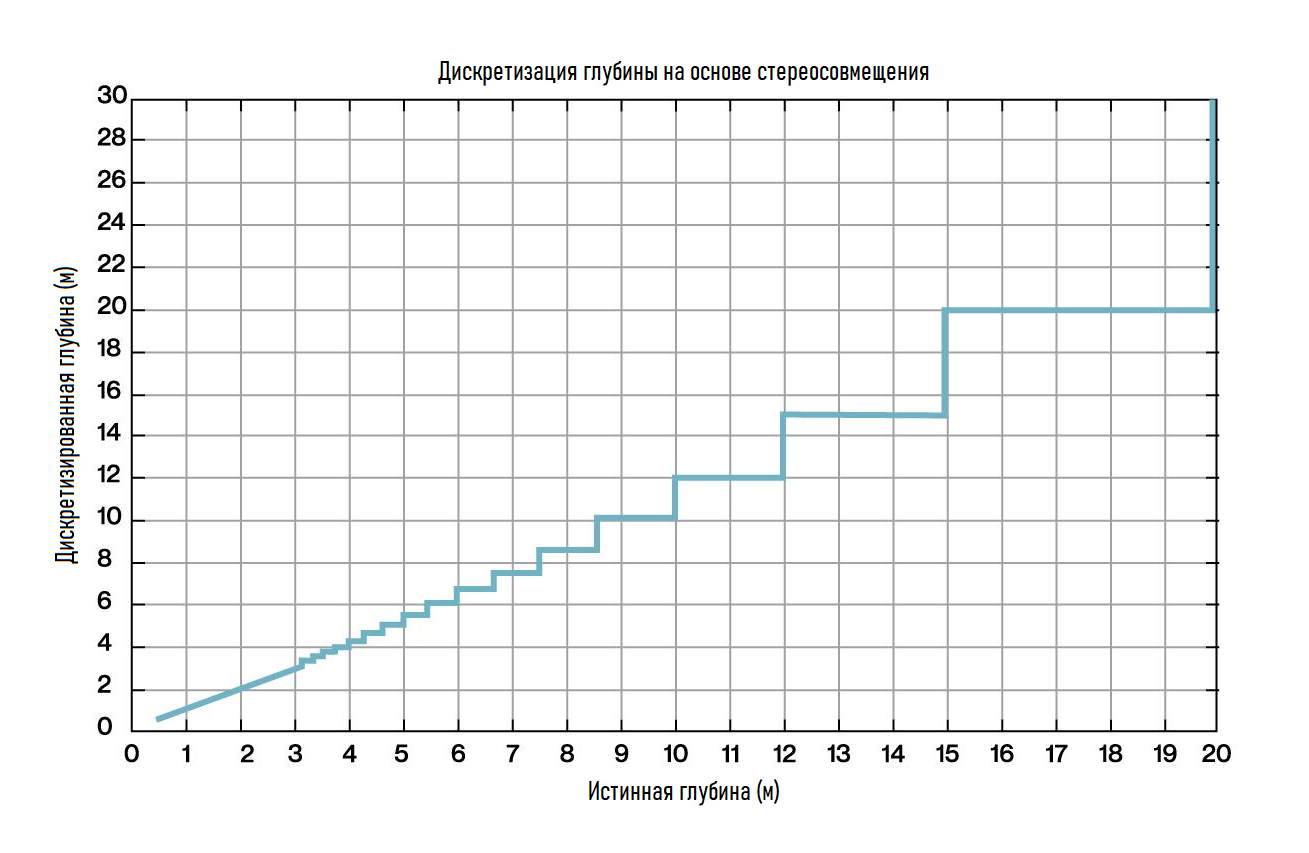 ความลึกที่ไม่ต่อเนื่องซึ่งวัดโดย "การจัดตำแหน่งสเตอริโอ" กับ "ความลึกที่แท้จริง"
ความลึกที่ไม่ต่อเนื่องซึ่งวัดโดย "การจัดตำแหน่งสเตอริโอ" กับ "ความลึกที่แท้จริง"
นอกจากนี้ ความเหลื่อมล้ำแตกต่างออกไปเมื่อความลึกเข้าใกล้ศูนย์เนื่องจากจำนวนพิกเซลในรูปภาพมีจำกัด ค่าความเหลื่อมล้ำจึงถูกจำกัดด้วย เป็นผลให้มีความลึกขั้นต่ำที่ระบบการรับรู้ตาบอด ความลึกขั้นต่ำนี้คือ 36 ซม. สำหรับ ANAFI Ai
เกี่ยวกับการปรับเทียบ: กล้องสเตอริโอแต่ละคู่ได้รับการปรับเทียบมาจากโรงงานเพื่อวัดความคลาดเคลื่อนเล็กๆ น้อยๆ ที่อาจเกิดขึ้นระหว่างกล้องทั้งสองได้อย่างแม่นยำ และชดเชยในการคำนวณความลึกบนเครื่องบิน
ผู้ใช้ยังสามารถสอบเทียบกล้องสเตอริโอคู่หนึ่งโดยใช้รูปแบบการทดสอบที่มาพร้อมกับโดรน โดยเฉพาะอย่างยิ่ง ในบางขอบเขต โดรนสามารถตรวจจับข้อผิดพลาดในการสอบเทียบที่อาจเกิดขึ้นที่อาจเกิดขึ้นได้ตลอดอายุการใช้งาน ในกรณีนี้ ซอฟต์แวร์เครื่องบินจะพยายามปรับและชดเชย และหากไม่สำเร็จ จะมีการแจ้งเตือนปรากฏขึ้นเพื่อขอให้คุณปรับเทียบใหม่
ความลึกจากการเคลื่อนไหว
การเคลื่อนไหวของโดรนยังสามารถใช้เพื่อรวบรวมภาพสภาพแวดล้อมจากมุมต่างๆ และสร้างข้อมูลเชิงลึกขึ้นใหม่ เทคนิคนี้เรียกว่าความลึกจากการเคลื่อนไหวหรือการตรวจจับด้วยตาข้างเดียว เนื่องจากกล้องเคลื่อนที่เพียงตัวเดียวก็เพียงพอที่จะรวบรวมข้อมูลความลึกได้
หลักการทำงานคล้ายกับการมองเห็นแบบสเตอริโอ แต่แทนที่จะเปรียบเทียบภาพของสภาพแวดล้อมที่ได้รับจากผู้สังเกตที่แตกต่างกันในเวลาเดียวกัน การรับรู้จะเปรียบเทียบภาพของสภาพแวดล้อมที่ผู้สังเกตคนเดียวกันได้รับในเวลาที่ต่างกัน หากโดรนกำลังเคลื่อนที่ ภาพจากผู้สังเกตการณ์ที่ไม่เหมือนใครนี้จะถูกถ่ายจากมุมต่างๆ เมื่อทราบตำแหน่งที่ถ่ายแต่ละเฟรมแล้ว เป็นไปได้ที่จะจัดตำแหน่งจุดที่ตรงกับจุดสนใจเดียวกันในภาพต่างๆ แล้วเปลี่ยนกลับเป็น 3D
เอาต์พุตเป็นคลาวด์แบบจุดสามมิติที่มี ANAFI Ai มากถึง 500 จุด ซึ่งสร้างขึ้นที่ความถี่ 10 Hz
 ตัวอย่างของ point cloud ที่สร้างขึ้นตามความลึกจากการเคลื่อนไหว - แผนที่สีเปลี่ยนจากสีแดง (ใกล้) เป็นสีม่วง (ไกลออกไป)
ตัวอย่างของ point cloud ที่สร้างขึ้นตามความลึกจากการเคลื่อนไหว - แผนที่สีเปลี่ยนจากสีแดง (ใกล้) เป็นสีม่วง (ไกลออกไป)
โดยทั่วไปแล้ว อัลกอริธึม ANAFI Ai Motion Depth จะสร้างข้อมูล (sparse point cloud) น้อยกว่าอัลกอริธึมการจับคู่สเตอริโอและต้องการให้โดรนเคลื่อนที่เพื่อรวบรวมข้อมูล นอกจากนี้ อัลกอริธึมนี้ไม่สามารถดึงข้อมูลในทิศทางที่แน่นอนของการเคลื่อนไหวได้ (อย่างน้อยก็สำหรับการถ่ายทอดสด) เนื่องจากวัตถุในภาพดูเหมือนจะนิ่งเกือบในทิศทางนี้ (โฟกัสการขยาย)
อย่างไรก็ตาม มันมีช่วงการตรวจจับที่ดีกว่า (ช่วงอนันต์ตามทฤษฎี) มากกว่าการจับคู่สเตอริโอ
Fill Grid
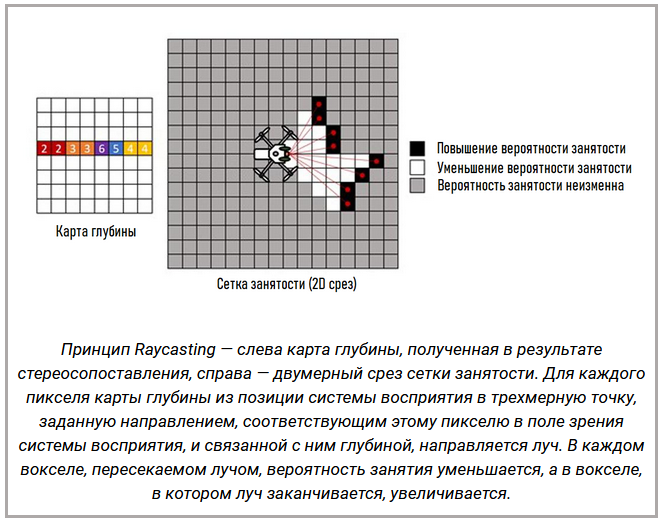
ข้อมูลความลึกจากอัลกอริธึมการตรวจจับสเตอริโอและตาข้างเดียวถูกรวมเข้ากับ Fill Grid เมชนี้สุ่มตัวอย่างสภาพแวดล้อม 3 มิติเป็นลูกบาศก์ 3 มิติที่เรียกว่า voxels แต่ละ voxel ถูกกำหนดความน่าจะเป็นที่จะถูกครอบครองโดยสิ่งกีดขวางหรือในทางกลับกันคือปราศจากสิ่งกีดขวาง
อัลกอริธึมการส่งผ่านรังสีใช้เพื่อรวมข้อมูลเชิงลึกลงในตารางการเติม สำหรับแต่ละพิกเซลของแผนที่ความลึกที่ได้รับจากการเปรียบเทียบสเตอริโอ มันจะถูกแปลงเป็นจุดสามมิติ และสำหรับแต่ละจุดของจุดเมฆ - เป็นความลึกที่ได้รับจากการเคลื่อนไหว:
- รังสีถูกวาดในตารางการเติมจากตำแหน่งของระบบการรับรู้ไปยังตำแหน่งของจุด 3D
- ความน่าจะเป็นของ voxel ที่มีจุด 3D ที่ถูกครอบครองเพิ่มขึ้น
- ความน่าจะเป็นที่ voxels ทั้งหมดข้ามโดยรังสีอื่นนอกเหนือจากที่มีจุด 3D ถูกครอบครองจะลดลง
ดังนั้น ตารางทำหน้าที่เป็นตัวกรองเวลาสำหรับข้อมูลความลึก ดูดซับสัญญาณรบกวนที่อาจเกิดขึ้นในการวัดความลึก และเป็นหน่วยความจำของการวัดก่อนหน้า ซึ่งช่วยให้ คุณสามารถนำทางสภาพแวดล้อมที่ยากลำบากแม้ในกรณีที่ไม่มีมุมมอง 360 °อย่างต่อเนื่องของระบบการรับรู้
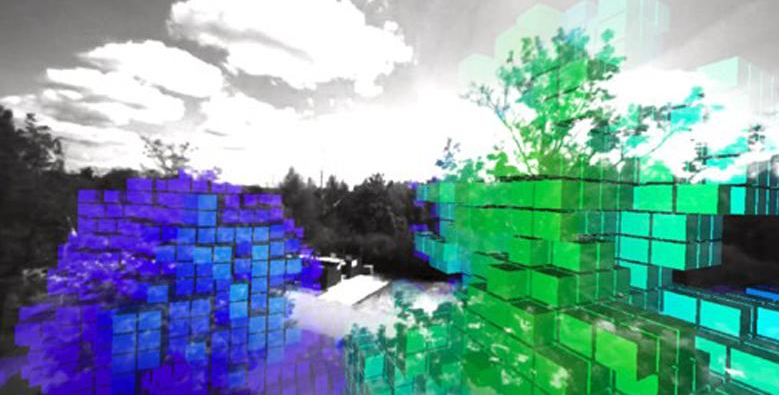 ตัวอย่างของตารางเติม Voxels ถูกวางทับบนมุมมองกล้องสเตอริโอด้านขวา ด้วยความมั่นใจว่ากำลังมีงานยุ่ง ตั้งแต่สีแดง (ใกล้) ไปจนถึงสีม่วง (ไกล)
ตัวอย่างของตารางเติม Voxels ถูกวางทับบนมุมมองกล้องสเตอริโอด้านขวา ด้วยความมั่นใจว่ากำลังมีงานยุ่ง ตั้งแต่สีแดง (ใกล้) ไปจนถึงสีม่วง (ไกล)
ตารางเติมเป็นพื้นฐานสำหรับอัลกอริธึมการวางแผนการเคลื่อนไหวที่ใช้โดย ANAFI Ai สำหรับการบินอัตโนมัติและการหลีกเลี่ยงสิ่งกีดขวาง
การหลีกเลี่ยงอุปสรรค
ด้วยความรู้เกี่ยวกับสภาพแวดล้อม 3 มิติของโดรนที่เก็บไว้ในกริด infill ANAFI Ai สามารถหลีกเลี่ยงอุปสรรคได้ สิ่งนี้ให้ความปลอดภัยเพิ่มเติมที่สำคัญสำหรับภารกิจอิสระ แต่ยังมีประโยชน์สำหรับการบินด้วยตนเอง โดยเฉพาะอย่างยิ่งหากแนวสายตาระหว่างนักบินกับโดรนบกพร่อง
ทุก ๆ 30 มิลลิวินาที ANAFI Ai คาดการณ์ว่าระยะเวลาอันสั้นที่ระบุจะเป็นอย่างไรในอนาคต การคาดคะเนนี้อนุมานจากลิงก์ที่ส่งโดยผู้ใช้ ไม่ว่าจะเป็นคำสั่งการบินจากรีโมทคอนโทรล จุดอ้างอิงสำหรับแนบไปกับแผนการบิน หรือวิถีอินพุต จากนั้น ใช้แบบจำลองโดรนภายในจำลอง อัลกอริธึมการกำหนดเวลาใหม่จะคำนวณการแก้ไขที่น้อยที่สุดที่เป็นไปได้สำหรับวิถีโคจรที่คาดการณ์ไว้นี้ ซึ่งจะทำให้โดรนไม่มีการชนกันและเป็นไปได้สำหรับโดรน
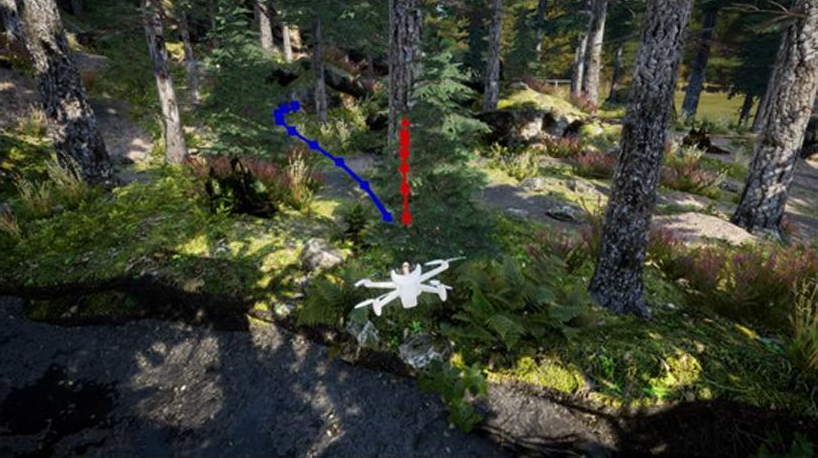 ตัวอย่างการปรับวิถีโคจรที่คำนวณโดยอัลกอริธึมการหลีกเลี่ยงสิ่งกีดขวางเพื่อตอบสนองต่อการชนของวิถีอ้างอิงกับต้นไม้
ตัวอย่างการปรับวิถีโคจรที่คำนวณโดยอัลกอริธึมการหลีกเลี่ยงสิ่งกีดขวางเพื่อตอบสนองต่อการชนของวิถีอ้างอิงกับต้นไม้
ระบบการหลีกเลี่ยงสิ่งกีดขวาง ANAFI Ai ได้รับการออกแบบให้ทำงานด้วยความเร็วสูงถึง:
- ระดับการบิน: 29 กม. / ชม.
- ปีน: 14 กม. / ชม.
- ลง: 11 กม. / ชม.
ประสิทธิภาพการหลีกเลี่ยงถูกจำกัดในสายฝนหรือลมแรง แสงน้อย หรือระบบนำทางด้วยดาวเทียมที่ขัดข้อง นอกจากนี้ ก่อนบิน คุณต้องแน่ใจว่าเลนส์ของระบบตรวจจับนั้นสะอาด
ภารกิจการบิน

คุณสมบัติที่สำคัญ
อากาศ SDK (ดู.ส่วน SDK) ช่วยให้นักพัฒนาสามารถเข้าถึงเซ็นเซอร์โดรน กล้อง อินเทอร์เฟซการเชื่อมต่อ และฟังก์ชันสแตนด์อโลนทุกตัว ดังนั้นพวกเขาจึงสามารถปรับแต่งพฤติกรรมของโดรนเพื่อสร้างภารกิจการบินได้ แต่ละภารกิจการบินประกอบด้วยชุดของพฤติกรรมหรือโหมดพื้นฐาน:
- บนพื้นดิน: พฤติกรรมเมื่อเครื่องยนต์หยุดทำงาน เช่น การสอบเทียบเซ็นเซอร์
- บินขึ้น: กลยุทธ์การบินขึ้นต่างๆ
- เลื่อน: ถือจุดคงที่
- เที่ยวบิน: คู่มือ ฟังก์ชั่นและการบินอัตโนมัติ
- การลงจอด: กลยุทธ์การลงจอดที่หลากหลาย
- วิกฤติ: เมื่อตรวจพบสถานะวิกฤติ
ภารกิจการบินที่กำหนดเองสามารถสร้างพฤติกรรมใหม่หรือนำกลับมาใช้ใหม่ได้จากภารกิจเริ่มต้น
ราคาและความพร้อมใช้งาน
การเริ่มขายโดรน ANAFI Ai มีกำหนดในเดือนกันยายน 2564 ข้อมูลราคายังไม่ได้รับการเปิดเผยในขณะนี้ เรายังคงตรวจสอบข้อมูลที่เข้ามาและจะอัปเดตส่วนนี้ในภายหลังอย่างแน่นอน

ดาวน์โหลดเอกสาร
เอกสารสำหรับนักพัฒนา:
วิดีโอ
รีวิวยอดนิยม ANAFI Ai จาก ผู้พัฒนาและผู้ใช้
การแกะกล่องและเที่ยวบินแรก
ทดสอบการบินของโดรนในระยะที่มีการเชื่อมต่อ 4G เวลาบินทั้งหมดคือ 29 นาทีที่ความเร็วเที่ยวบินแนวนอนเฉลี่ย 58 กม. / ชม. (16 ม. / s) ในช่วงเวลานี้ โดรนสามารถบินได้ 27 กม. นอกจากนี้คุณยังสามารถสังเกตได้ว่าเที่ยวบินดำเนินการในสภาพอากาศที่มีลมแรง ซึ่งระบบโดรนเตือนตลอดเวลา
.






