
- 1 Uvod
- 2 Razvojni programer o stroju
- 3 Značajke
- 4 Paket sadržaj
- 5 Specifikacija
- 5.1 Dron
- 5.2 Komunikacija
- 5.3 Navigacijski sustav
- 5.4 Skycontroller 4
- 5.5 Inteligentna baterija zrakoplova
- 5.6 Aplikacija
- 5.7 Kamera
- 5.8 Autonomni načini letenja
- 5.9 Kibernetička sigurnost
- 5.10 Papiga SDK
- 6 Izgled
- 7 Komunikacija
- 7,1 4G
- 7,2 Maks. domet s 4G vezom
- 7.3 Wi-Fi
- 7.4 Video u živo
- 8 Kamera
- 8.1 48MP matrica
- 8.2 Objektiv
- 8.3 Video načini
- 8.4 Video kodiranje
- 8,5 HDR
- 8,6 Režimi fotografija
- 9 Hibridna stabilizacija
- 9.1 Gimbal glavne kamere
- 10 Fotogrametrija
- 10.1 Pregled i kartografija
- 10.2 AI i 4G mogućnosti
- 10.3 Autonomni let
- 11 Fotogrametrija ili lidar
- 11.1 Profesionalci fotogrametrije
- 11.2 LIDAR nedostaci
- 12 SDK
- 12.1 SDK za zrak
- 12.2 SDK za zemlju
- 12.3 OpenFlight
- 12.4 Sfinga
- 12.5 Olympe
- 12,6 PdrAW
- 12,7 Modeli C. A. D.
- 12.8 MAVLink i GUTMA kompatibilnost
- 13 Najveći partnerski ekosustav za bespilotne letjelice Parrot
- 13.1 Papagaj za sve poslovne potrebe
- 14 Kibernetička sigurnost
- 14.1 Privatnost podataka
- 14.2 U skladu s FIPS140 -2 i certificirano CC EAL5 Secure Elementom
- 14.3 4G Sigurna veza i jaka provjera autentičnosti
- 14.4 Sigurna inicijalizacija i nadogradnja
- 14.5 Postavljanje korisničkih ključeva na sigurnom elementu
- 14.6 Digitalno potpisane fotografije
- 14.7 Transparentnost i stalna sigurnosna provjera uz dodjelu bugova
- 15 Upravljanje podacima
- 15.1 Prikupljeni podaci
- 15.2 Konačna upotreba prikupljenih podataka [1 26]
- 15.3 Poboljšanje umjetne inteligencije (AI)
- 16 Karakteristike leta
- 16.1 Aerodinamičke karakteristike
- 16.2 Pokretači i aerodinamika
- 16.3 Senzori
- 16.4 Karakteristike senzora
- 16.5 Autopilot
- 17 Autonomni let
- 17.1 Ključne značajke
- 17.2 Strategija sustava percepcije
- 17.3 Senzori
- 17.4 Dvostruki ovjes
- 17.5 Obnova okoliša
- 18 Letne misije
- 18.1 Ključne značajke
- 19 Cijena i dostupnost
- 20 Preuzmite dokumentaciju
- 21 Videozapisi
Uvod [16 4]
Parrot Anafi Ai potpuno je novo jedinstveno rješenje poznatog francuskog developerakomercijalnoj uporabi
Pozivna kartica Anafi Ai je ugrađeni 4G modul, zahvaljujući kojem je bespilotna letjelica uspjela koristiti četvrtu generaciju mobilne komunikacije kao glavni kanal za prijenos podataka između drona i upravljačke opreme, koja zapravo uklanja sva ograničenja u dometu leta i predodređuje rad bespilotne letjelice izvan vidnog polja. Gledajući naprijed, napominjemo da se deklarirani potencijal stroja pokazao nevjerojatno snažnim i više nego ikad odgovara njegovu futurističkom izgledu koji je inspiriran prirodom za stvaranje francuskih inženjera.
Razvojni programer o automobilu
Martin Liné, direktor marketinga u tvrtki Parrot, Parrot dronovi

Osobine
Ključne značajke papige Anafi Ai:
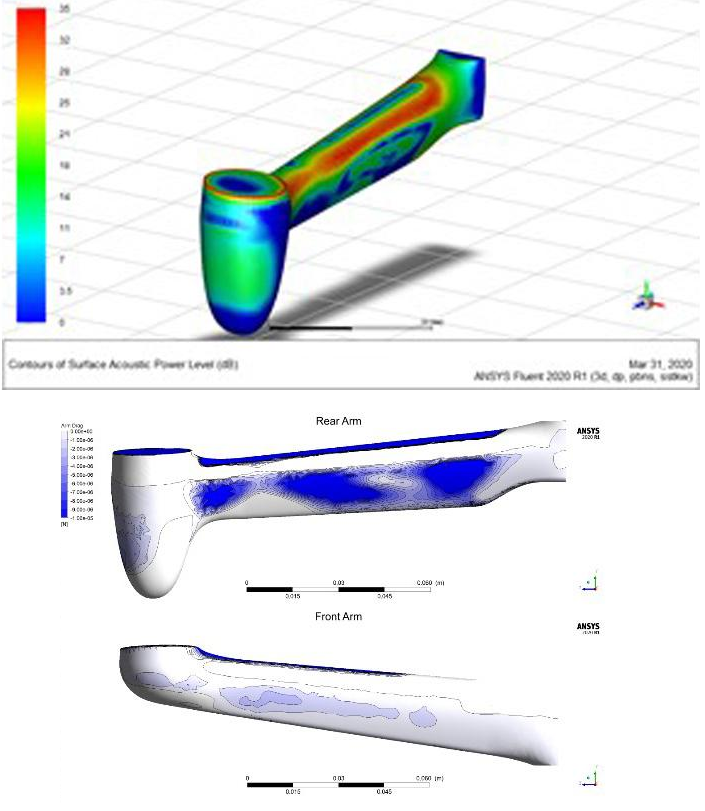
- Težina 898 grama
- Vrijeme leta 60 sekundi
- Jedinstveni prijenosni sklopivi dizajn
- Ugrađeni 4G komunikacijski modul za potpunu interakciju bespilotnih letjelica / upravljačke opreme bez ograničenja u svim uvjetima okoliša
- ) Kompatibilan s LTE -om u cijelom svijetu
- Opremljen svesmjernim sustavom prijenosa signala (4 usmjerene antene s reflektorom (pojačanje: antene od 2,5 dBi / s). Dron određuje najbolji par antena ovisno o njegovoj orijentaciji i položaju u odnosu na pilot položaj)
- Opremljen jedinstvenim omnidirekcijskim sustavom slikanja okolnog svijeta izgrađenim na paru stereoskopskih kamera postavljenih na specijaliziranom gimbalu s rasponom pomicanja od 330 stupnjeva (-120 ° do 210 °), koji rade u tandem s inteligentnim sustavom optimizacije. staze leta
- Prilagođeno za let u zatvorenom prostoru
- Prijenos videa uživo u 1080p s niskom latencijom (300 m / s) bez ograničenja dometa bilo gdje u svijetu, s brzinom prijenosa videa 12 Mbps
- Mogućnost prijenosa datoteka u pohranu u oblaku izravno u letu
- Ugrađeni Wi-Fi komunikacijski modul (Wi-Fi 802.11a / b / g / n) za potpunu kontrolu interakcije drona / opreme (kao alternativa mogućnost povezivanja)
- Podređeno. Wi-Fi frekvencijski raspon: 2,4 GHz / 5,8 GHz
- Maks. raspon leta FPV-a preko Wi-Fi-ja: 9 km
- Jedinstven automatski način rada 4G / Wi-Fi modula, koji omogućuje, na temelju zagušenja mreže, besprijekoran prijelaz s jedne komunikacijske tehnologije na drugu bez gubitka podataka
- Klasa zaštite bespilotna letjelica IPX3
- Maks. vrijeme leta 32 min
- Max. brzina horizontalnog leta 61 km / h
- Max. otpor vjetra: 13 m / s
- Max.strop iznad razine mora 5000 m
- 4MP kamera od 48 MP 4K izgrađena na 1/2-inčnoj CMOS matrici s veličinom piksela 0,8 μm; s ugrađenim nizom filtera u boji Bayer
- Optički LD-ASPH objektiv
- Hibridni 6-osni sustav za stabilizaciju slike (3-osni mehanički troosni digitalni EIS)
- Kontrolirano radni raspon Gimbal -90 ° do 90 °
- 6x digitalni zum bez gubitaka (2x 4K / 4x FHD)
- Max. brzina prijenosa video zapisa 200 Mbps
- Formati video zapisa HDR8 / HDR10
- Maks. dinamički raspon 14EV
- P-log profil boje za naknadnu obradu
- 5 × automatski načini letenja i snimanja (fotogrametrija / plan leta / snimatelj / pametni RTH / vozilo)
- Ugrađeni utori za MicroSD i SIM kartice
- Kompatibilni s PIX4D Suite
- Fotogrametrijski načini leta dostupni su u mob. Aplikacija FreeFlight 7 i softver OpenFlight
- Izrada plana leta jednim klikom
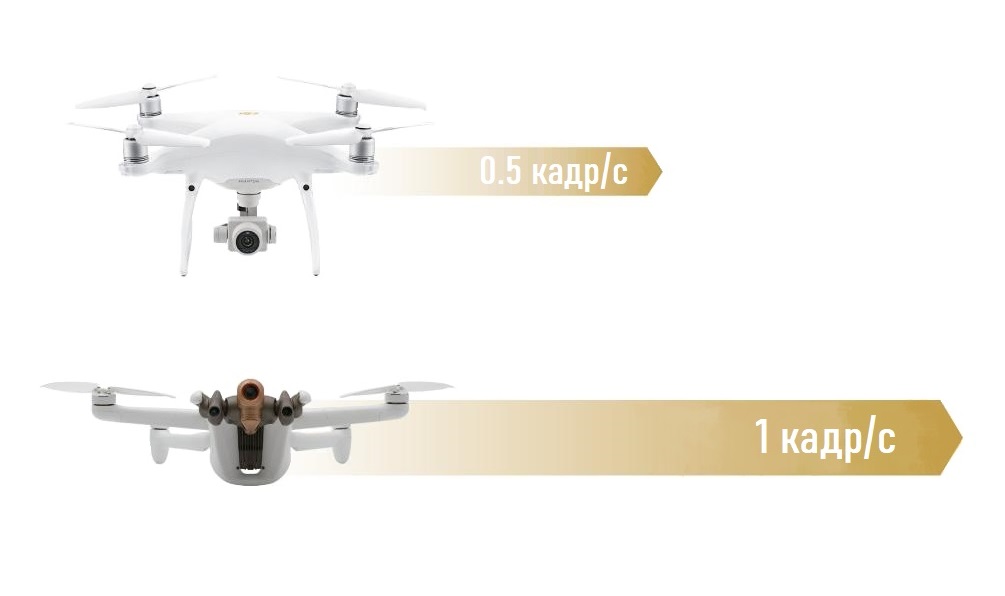
- Fotogrametrijska fotogrametrija od 48 MP 1 fps: dvostruko brža od konkurenata
- Točnost snimanja: 0,46 cm / piks. GSD na 30 m
- Podrška za Parrot SDK (s mogućnošću ugradnje vašeg koda u bespilotnu letjelicu pomoću Air SDK -a, stvaranje mobilnih aplikacija pomoću SDK -a na tlu, konfiguriranje zemaljske postaje otvorenog koda pomoću OpenFlight -a, interakcija sa suvremenom Sfingom alat za simulaciju bespilotnih letjelica, kao i Python skriptiranje s Olympeom i obrada video zapisa i metapodataka s PdrAW -om)
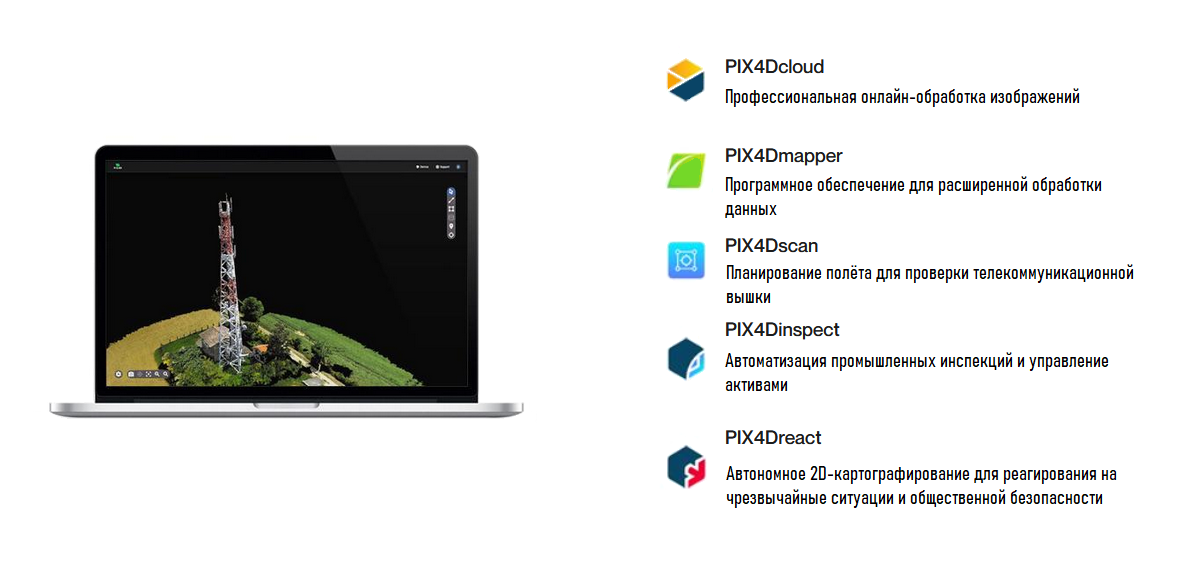
- Kompatibilno sa softverom treće strane: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- Alies sa ANAFI Propisi Uredba Europske unije o zaštiti podataka (GDPR)
- Vrhunska privatnost podataka s ugrađenim NIST FIPS140-2 Razina 3 WISeKey Sigurni element s zajedničkim kriterijima EAL5 certifikat
- Video i kontrole zaštićene su SRTP / DTLS prema na webRTC
- Nova prijenosna upravljačka oprema Parrot Skyco ntroller 4
- Nova mobilna aplikacija Parrot FreeFlight 7

Paket
Razvojni programer nudi bespilotnu letjelicu u jednoj konfiguraciji, koja će uključivati:
- Drone ANAFI Ai
- Kruto transportno kućište
- Upravljačka oprema Parrot Skycontroller 4
- 1 × Smart baterija
- USB-PD punjač
- Komplet rezervnih propelera (2CW / 2CCW)
- Prateći kabel (USB-C do Lightning)
- 2 × popratni kabeli (USB -C na USB -C)
- Tablica kalibracije

Specifikacije
) Zrakoplovi

Komunikacija
Navigacijski sustav
Skycontroller 4

Inteligentna baterija zrakoplova
Aplikacija

)Kamera

) Autonomni načini leta
Kibernetička sigurnost
Parrot SDK
Zatim, možete se upoznati s ključnim podacima o Parrot Anafi Ai, koji će vam omogućiti da saznate više o deklariranom potencijalu stroja, kao i koja su poboljšanja implementirana u usporedbi s komercijalnom verzijom drona Parrot Anfi Termalni i drugi dronovi vodećih marki.
Izgled





Komunikacija
4G
ANAFI Ai uključuje 4G radijski modul (osim radijski modul Wi-Fi), koji vam omogućuje emitiranje videotoka u kvaliteti 1080p s maksimalnom brzinom prijenosa od 12 Mbps, s vrlo niskom latencijom (300 ms), bez ograničenja u rasponu i bilo gdje u svijetu.
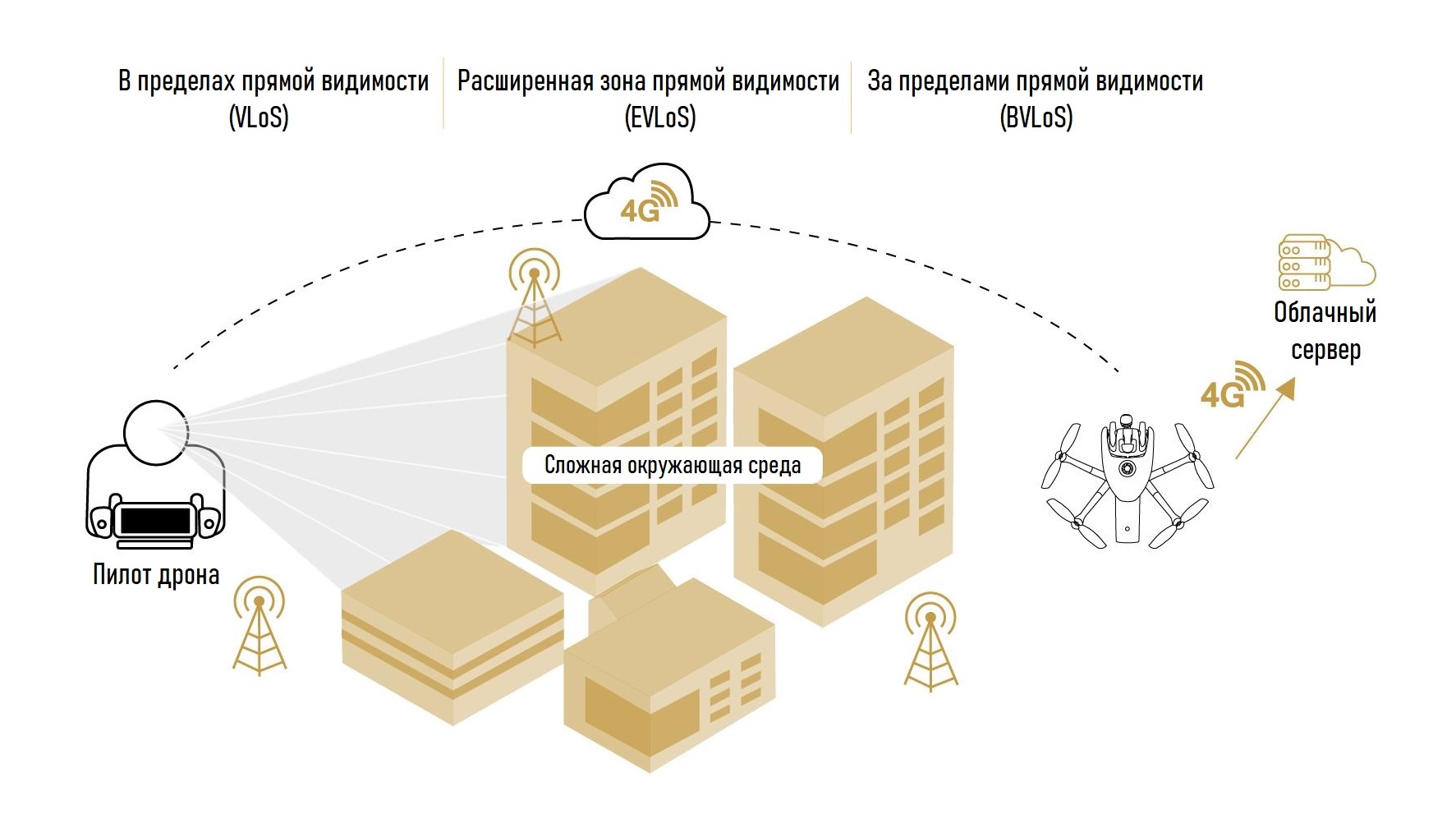
Kompatibilnost
ANAFI Ai 4G modul podržava preko 28 frekvencijskih opsega, pokrivajući više od 98% frekvencija raspoređenih u cijelom svijetu.
Automatski mrežni prekidač
Kvaliteta i propusnost 4G i Wi-Fi mreža mjere se svakih 100 ms kako bi se strujanje prilagodilo mrežnim uvjetima. U kombinaciji s algoritmima usmjeravanja, veza između drona i njegovog kontrolera održava se čak i kada je Wi-Fi ozbiljno poremećen. Dakle, kada je efektivna propusnost (korisna propusnost) Wi-Fi-ja ispod 1,5 Mbps, sustav će se automatski prebaciti na 4G.
Kako bi se ograničila potrošnja mobilnih podataka kada je pilot unutar dometa Wi-Fi mreže bespilotne letjelice, prijelaz s 4G na Wi-Fi također se izvodi automatski bez prekidanja videotoka.
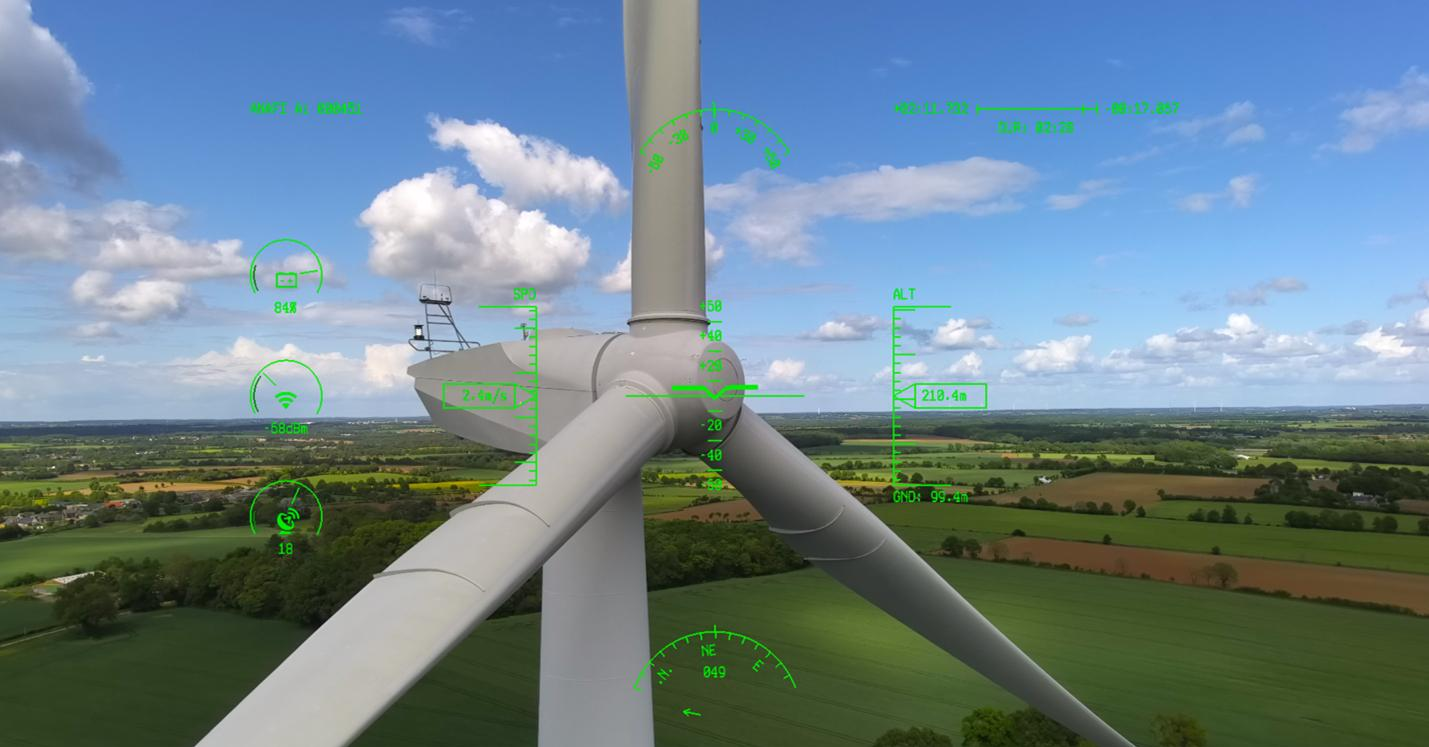
Maks. domet s 4G vezom
Videozapis razvojnog programera prikazuje maks. domet leta Anafi Ai s 4G vezom u jednom smjeru s jednim punjenjem baterije. Ukupno vrijeme leta bilo je 29 minuta pri prosječnoj horizontalnoj brzini leta od 58 km / h (16 m / s). Za to je vrijeme bespilotna letjelica uspjela prevaliti 27 km. Također možete primijetiti da je let izveden u uvjetima jakog vjetra, na što je sustav dronova stalno upozoravao.
Implementirani algoritmi za optimizaciju videotoka
Kontrola zagušenja 4G
Algoritam za kontrolu zagušenja omogućuje:
- Mjerenje gubitka paketa tijekom cijelog mrežnog ciklusa.
- Odgoda mjerenja (vrijeme povratnog putovanja).
- Podesite propusnost prema ova dva parametra.
Konačni cilj algoritma je maksimizirati dostupnu propusnost uz održavanje najniže moguće latencije. Ovaj je algoritam implementiran na svakom od sučelja dostupnih u dronu, svako sa svojim parametrima, optimiziranim prema mreži. Na temelju informacija dobivenih ovim algoritmom, upravitelj veza donosi odluke o usmjeravanju i aktivnom sučelju.
Upravljanje dronom putem 4G veze
ANAFI Ai se povezuje s daljinskim upravljačem putem 4G-a za manje od 30 sekundi ako je dron izvan dometa Wi-Fi-ja, i za manje od 15 sekundi ako je bespilotna letjelica u dometu Wi-Fi-ja. Također, 4G veza omogućuje:
- Otkrivanje i pokretanje veze na temelju VOIP SIP protokola.
- Pomoću relejnog poslužitelja uspostavite veze putem sigurnih mreža.
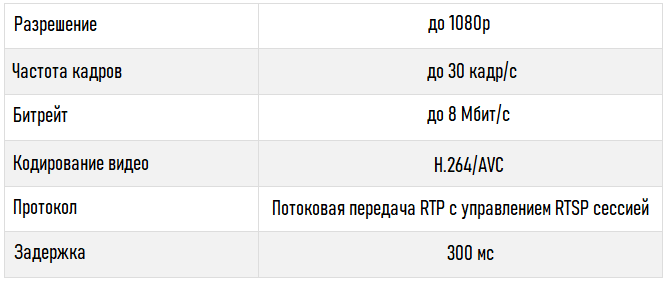
Performanse videotoka
- Latencija: 300 ms.
- Sigurnost: video i kontrole zaštićene su SRTP / DTLS prema webRTC.
- Antene: 28 LTE opsega od 700 MHz do 2,6 GHz.

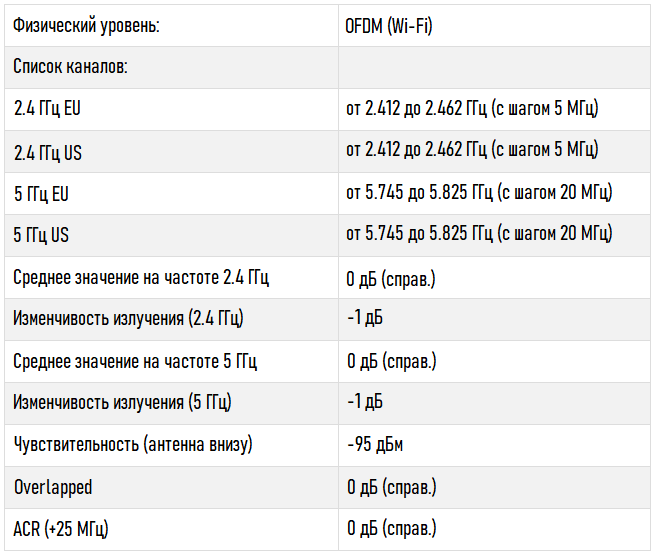
Wi-Fi
Svesmjerni prijenosni sustav
- ANAFI Ai ima 4 usmjerene reflektorske antene (s pojačanjem antene: 2,5 dBi / s). Dron određuje najbolji par antena na temelju njegove orijentacije i položaja u odnosu na položaj pilota.
- S rekombiniranim dobitkom od 3,5 / - 1,5 dBi u vodoravnoj ravnini drona, ANAFI Ai RF dobitak vrlo je ujednačen.
- Zračenje antene nizvodno poboljšano je za 4 dB u odnosu na ANAFI.
Vanjski dizajn radija velike snage
Prednji dio radija maksimalno povećava snagu u podnožju antene s vrlo dobrom linearnošću i osjetljivost (-94 dBm pri 6,5 Mbps) za postizanje maksimalne FCC granične snage.

Pouzdanost Wi-Fi-ja
802,11 parametri
niska propusnost, niska latencija, varijabilnost razine prijema zbog brzine dron, veliki domet, prisutnost smetnji. Ti parametri uključuju agregaciju, broj ponovnih pokušaja, MiMo tehnologiju (STBC), brzinu prijenosa podataka kontrolnog okvira i uvjete prekida veze.
Inteligentno sprječavanje smetnji
ANAFI Ai ima algoritam za brisanje kanala (2,4 GHz i 5 GHz dualni pojas) u slučaju smetnji.
Adaptacija i nadzor protoka
ANAFI Ai kontinuirano prati status svoje veze od 4 Hz i može otkriti smetnje. To vam omogućuje dinamičku optimizaciju propusnosti i veličine prenesenih paketa. Također upozorava pilota ako se nalazi u posebno ometajućem okruženju ili će izgubiti signal.
Smanjenje propusnosti
Na granici svog raspona i ako to uvjeti dopuštaju, ANAFI Ai se može prebaciti na propusnost od 10 MHz kako bi poboljšao svoju osjetljivost za 3 dB i povećao raspon za 40%.

Indikatori radija
Video emitiranje
Indikatori video veze
Implementirani algoritmi optimizacije videotoka
Parrot Gen4 Streaming (4. generacija)
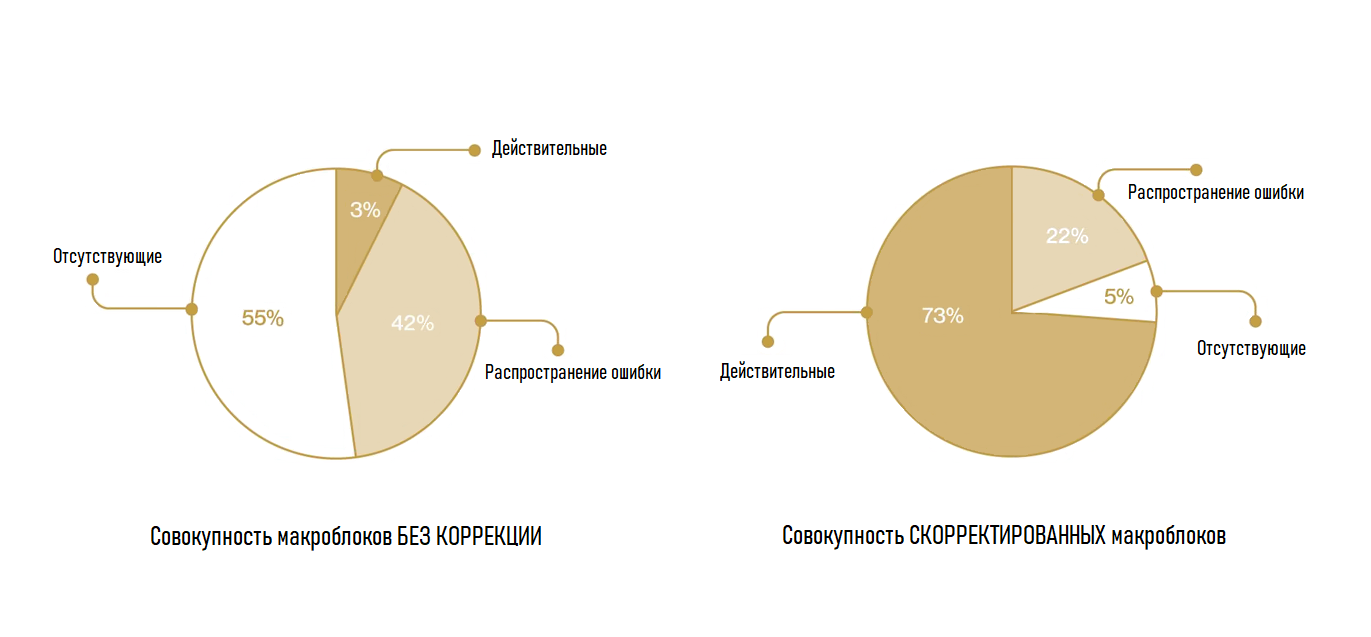
Ovaj algoritam smanjuje vizualni utjecaj gubitaka na mreži i omogućuje interoperabilnost svi dekoderi, uz sintaksički potpun tok: nedostajući dijelovi slike rekonstruiraju se kao dijelovi koji nedostaju, identični onima na referentnoj slici.
Dakle, greške su sadržane u onim područjima koja su sklona gubitku i ne odnose se na cijelu sliku.
Grafikoni u nastavku prikazuju stopu uspješnosti dekodiranja makrobloka pri 5% gubitka mreže - sa i bez naprednih značajki streaminga ANAFI Ai. Algoritam osigurava ispravno dekodiranje 75% makroblokova. Omogućuju korisniku da nastavi svoju misiju bez zamrzavanja zaslona ili gubitka streaminga.
Kontrola zagušenja
Algoritam također procjenjuje Wi-Fi i radijsko okruženje kako bi predvidio i izbjegao gubitak paketa i zagušenje mreže, što pomaže u smanjenju latencije. Algoritam se temelji na procjeni kapaciteta kanala, izračunato na temelju brzine prijenosa podataka i stope pogrešaka na fizičkom sloju; tada utječe na parametre kodiranja mreže i enkapsulacije.
Metapodaci
Metapodaci se prenose videotokom. Konkretno, oni sadrže telemetrijske elemente bespilotnih letjelica (položaj, nadmorska visina, brzina, razina baterije itd.) I video metriku (kut kamere, vrijednost ekspozicije, vidno polje itd.).
Sinkronizacija slika i otvorenih metapodataka obavlja funkcije preciznog pozicioniranja na karti, praćenja instrumenata leta u HUD -u ili omogućavanja elemenata proširene stvarnosti.
Metapodaci su uključeni standardnim metodama (proširenje zaglavlja RTP); format podataka koji je definirao Parrot je otvorenog koda: dostupan je u ANAFI Ai SDK -u.
Kamera

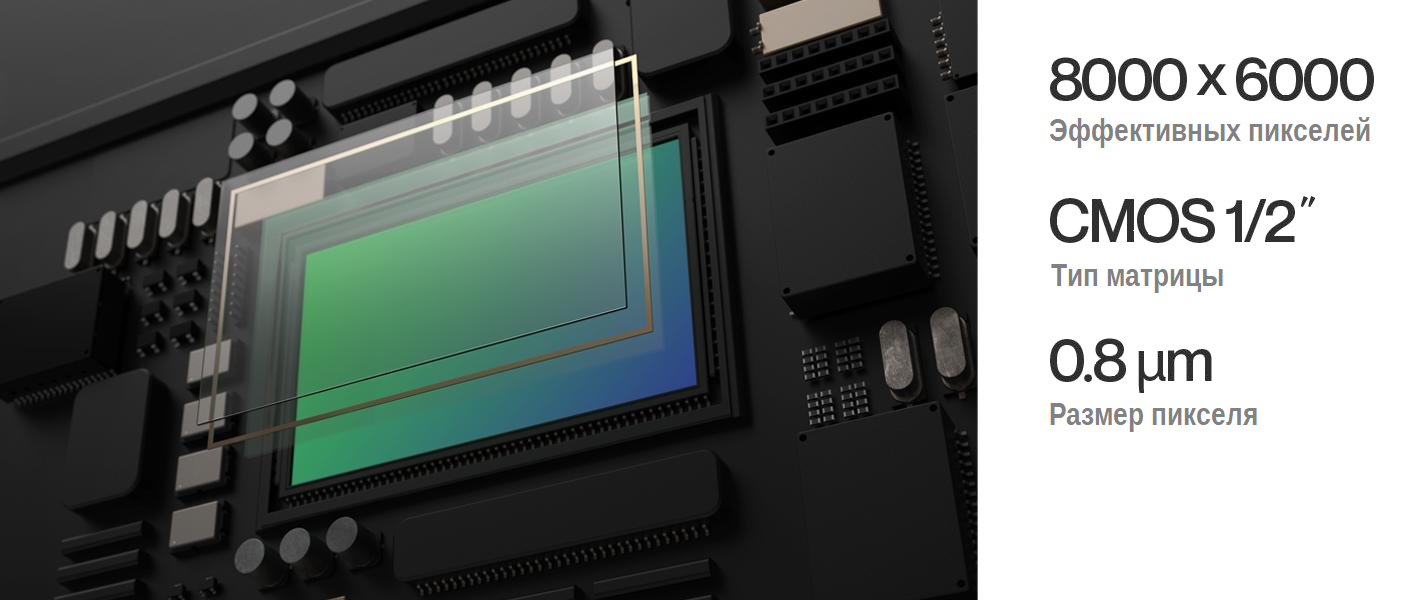
48MP senzor
ANAFI Ai matrica uključuje veliki broj megapiksela za detaljno snimanje iz zraka.
Koristi Quad Bayer tehnologiju filtera u boji gdje grupe od 4 susjedna piksela imaju istu boju. Tako se HDR snimanje u stvarnom vremenu može postići u foto i video načinu dodavanjem signala iz četiri susjedna piksela.
Njegov dinamički raspon je 4 puta veći od standardnih Bayerovih matrica. Čak se i složene scene mogu snimiti s minimalnim isticanjem ili gubitkom detalja u sjeni.
Objektiv
ANAFI Ai leća posebno je razvijena za Parrot. Kombinira 6 asferičnih elemenata i optimiziran je za smanjenje optičkog bljeska. Ovaj objektiv daje 68 ° HFoV u standardnom video načinu rada i 64,6 ° HFoV u standardnom načinu rada za fotografije.

Video načini rada
ANAFI Ai snima glatki 4K video pri 60 sličica u sekundi, uključujući P-Log, a pogledajte i HDR10 4K video pri 30 fps. Donja tablica prikazuje sve ANAFI Ai video načine.

Video kodiranje
Korisnici mogu birati između H.264 (AVC) i H.265 (HEVC).
Sve rezolucije koriste sljedeće formate piksela:
- YUV420p (8-bpc prostor u boji BT.709) za standardni način rada i HDR8.
- YUVJ420p (8 bita / komponenta, puni raspon - prostor u boji BT.709) za stil P -log.
- YUV420p10 (10bpc BT.2020 prostor u boji) za snimanje HDR10, samo H.265.
HDR
Prilikom snimanja videa u HDR8 i HDR10, ANAFI Ai pokriva dinamički raspon od 14EV. Format HDR10 nudi maksimalnu svjetlinu od 1000 nita i dubinu boje od 10 bita. Pruža milijardu boja u odnosu na 16 milijuna za standardni dinamički raspon. U usporedbi s HDR8, HDR10 proizvodi slike dvostruko svjetlije uz odgovarajuće povećanje kontrasta. HDR8 se može prikazati na bilo kojem standardnom ekranu, dok je HDR10 za televizore i HDR10 zaslone.
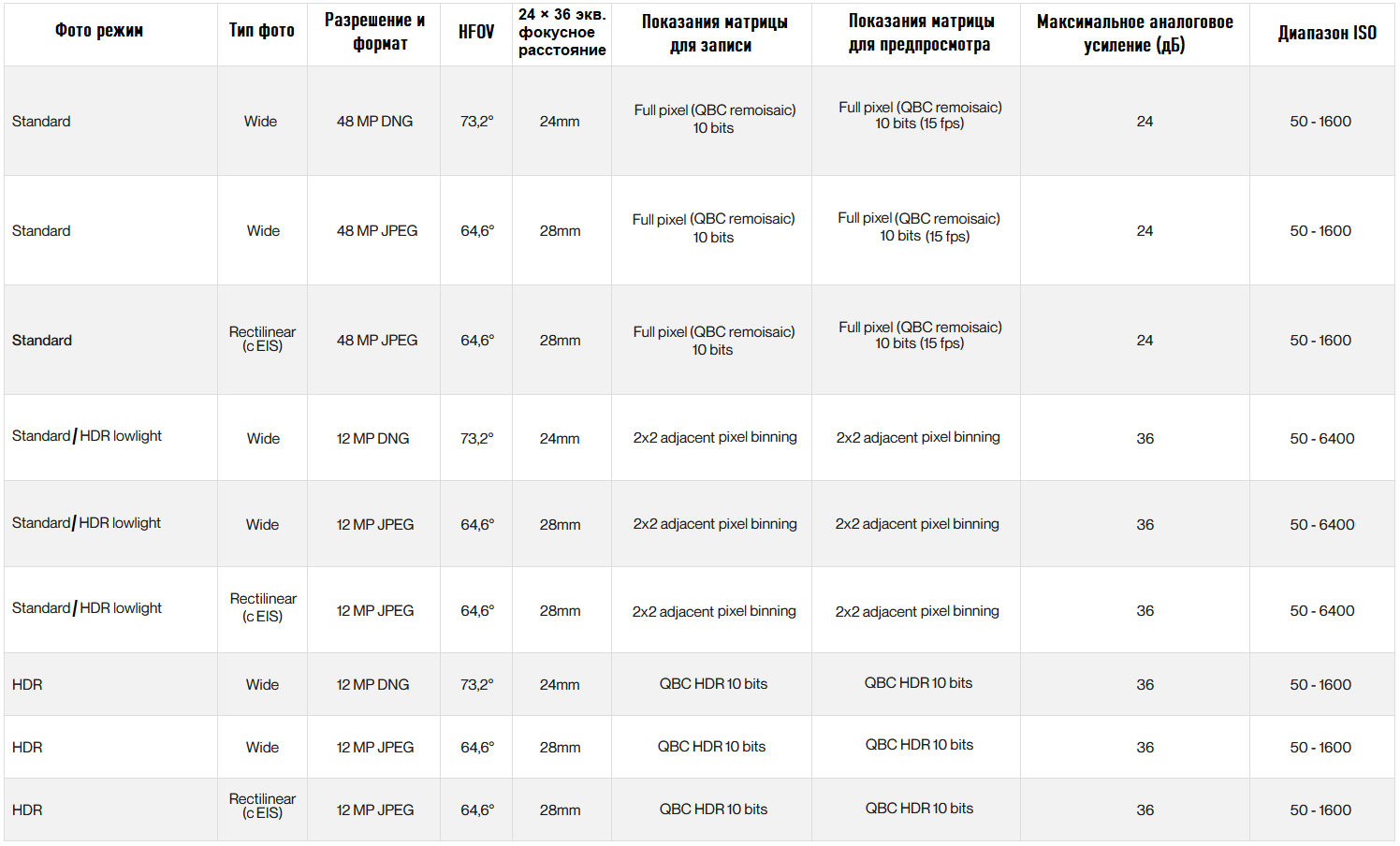
Režimi fotografija
Opis načina rada
Odjeljak za kontrolu načina rada sadrži postavke koje utječu na broj snimaka snimljenih svaki put kada se okidač otpusti.
Način pojedinačnog snimanja
Standardni način pojedinačnog snimanja. Nakon svakog otpuštanja zatvarača, sustav odmah obrađuje snimljenu sliku.
Bracketing način rada
Korisnici mogu snimiti seriju od 3, 5 ili 7 sličica s različitom ekspozicijom za svaki kadar. Dostupne su sljedeće postavke:
- [-1 EV, 0, 1 EV] (zadane postavke)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

Burst način rada
Burst način rada omogućit će korisniku snimanje niza od 10 sličica u 1 sekundi.
Panoramski način
Panoramski način uključuje četiri različita panoramska snimka:
- Sferni (360 °) je panoramski način koji uključuje tri mogućnosti za snimanje sferne panorame: Sfera / Mali planet / Tunel.
- Vodoravno (180 °)
- Okomito (109 °)
- Superširoko - novo super način širokog spajanja 9 slika (HFOV 110 °, ravna panorama)
Za pojedinosti o specifikacijama panoramskog načina rada pogledajte donju tablicu:

Timelapse mode
Ovaj način rada omogućuje vam snimanje fotografija u sljedećim fiksnim vremenskim intervalima:
- 48MP: 1, 2, 4, 10, 30 ili 60 sekundi.
- 12MP: 0,5, 1, 2, 4, 10, 30 ili 60 sek.
GPS Lapse način rada
Ovaj način rada za fotografije razvijen je za pregled i fotogrametriju. Omogućuje vam snimanje fotografija u sljedećim intervalima fiksne udaljenosti: 5, 10, 20, 50, 100 ili 200 metara.
Donja tablica prikazuje načine snimanja i razlučivosti snimanja fotografija, uključujući način očitavanja senzora:
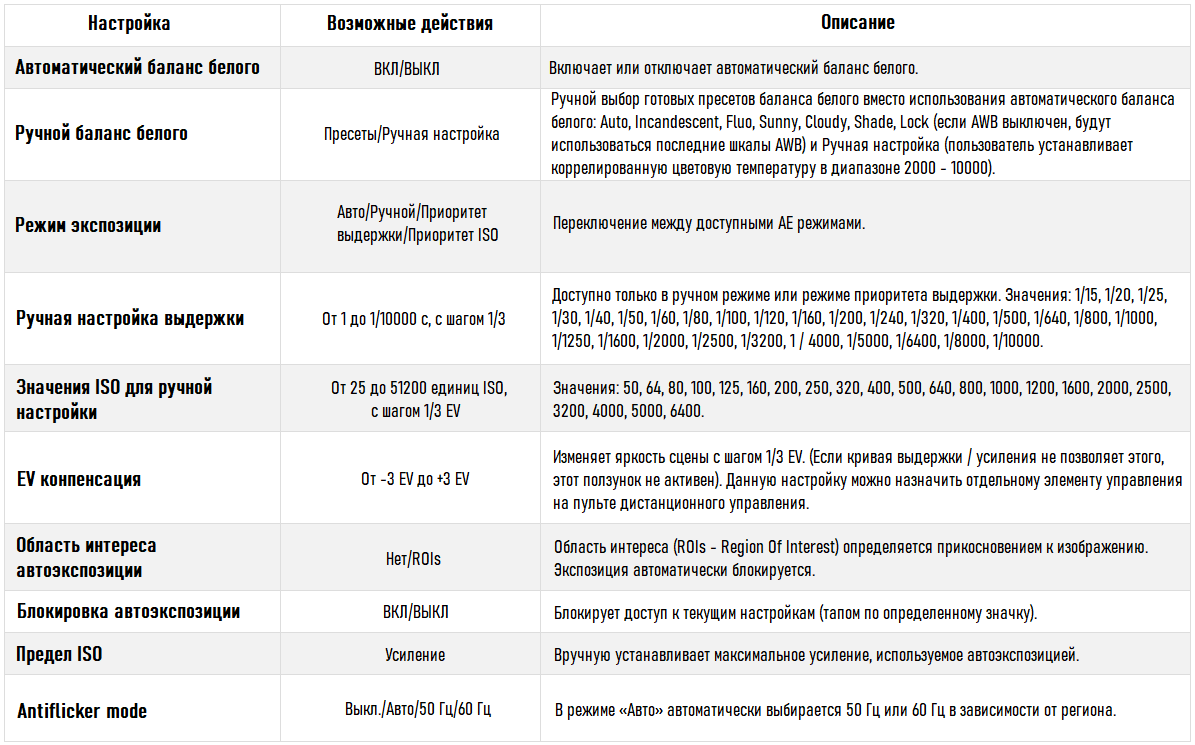
Postavke
U sljedećem tablica prikazuje dostupne postavke za svaki način rada.
6x zumiranje
Zumiranje je dostupno u svim načinima fotografije i videozapisa. U kombinaciji sa senzorom od 48 megapiksela, precizni algoritmi izoštravanja proizvode slike visoke razlučivosti čak i pri upotrebi 6x digitalnog zuma. Korisnici ANAFI Ai -a sada mogu vidjeti detalje od 1 cm s udaljenosti od 75 m. Veliki broj piksela također omogućuje obrezivanje 4K videa na 1080p bez gubitka kvalitete.

Hibridna stabilizacija
ANAFI Ai ima najprecizniju stabilizaciju na tržištu mikro UAV.
Kombinira kombiniranu stabilizaciju:
- troosnu mehaničku (troosnu meha. Gimbal)
- Elektronički troosni (EIS)
Mehanička stabilizacija stabilizira osi kamere bez obzira na položaj leta bespilotne letjelice. Elektronička stabilizacija slike ispravlja učinke mikrovibracija za frekvencije iznad 100 Hz, što mehanički pogon ne može podnijeti.
Gimbal glavne kamere
Mehanička stabilizacija omogućuje vam stabilizaciju i orijentaciju vodoravne osi pogleda kamere na sve 3 osi.
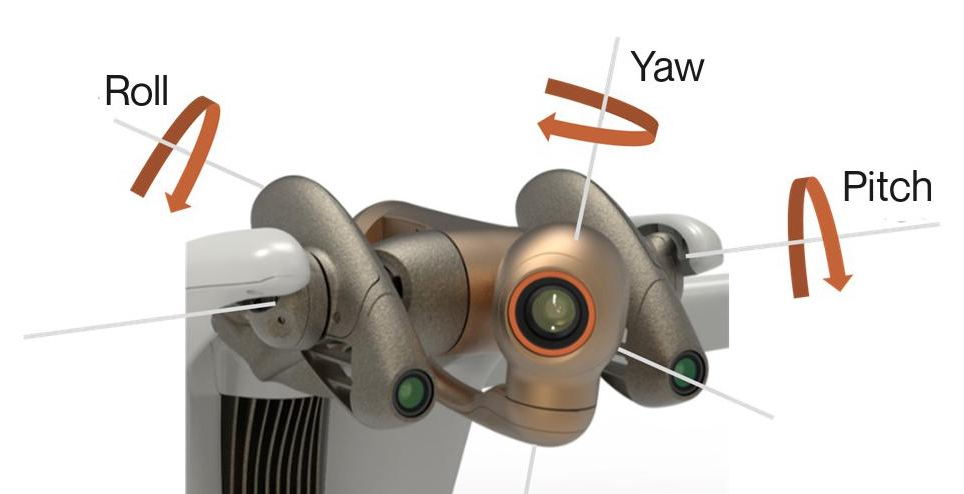 3 osi rotacije meha. ovjes glavne kamere ANAFI Ai.
3 osi rotacije meha. ovjes glavne kamere ANAFI Ai.
Ključne značajke
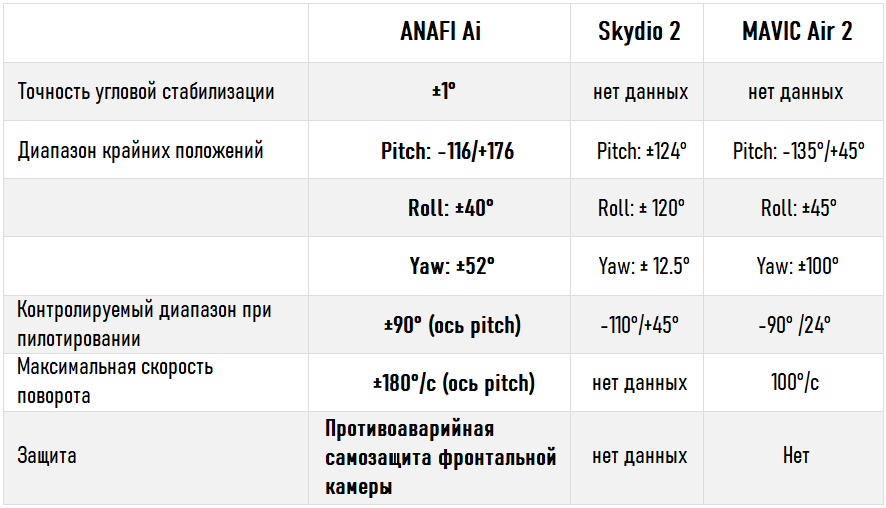
- 3 -osi mehanički gimbal za glavnu kameru
- Okomiti pomak 292 °, Vidno polje -116 ° do 176 °
Performanse gimbala
- EIS algoritam ispravlja učinke njihanja i izobličenja širokokutnog objektiva, a također izvodi i 3-osnu digitalnu stabilizacija slike (Roll, Pitch and Yaw).
- Metoda se sastoji u primjeni geometrijske transformacije slike. Geometrijska transformacija povezana je s vremenskom oznakom i točnim položajem zahvaljujući IMU -u.
- Geometrijska transformacija primjenjuje se na svaku sliku prema optičkim izobličenjima, vibracijama i kretanjima izmjerene jedinice kamere.
Raspon zakretanja 292 °
Kamera ima horizontalni raspon zakretanja od -116 ° / 176 ° oko osi nagiba, čime se omogućuje promatranje iznad i ispod drona, što je jedinstvena prilika na tržištu mikro-UAV.
![]()
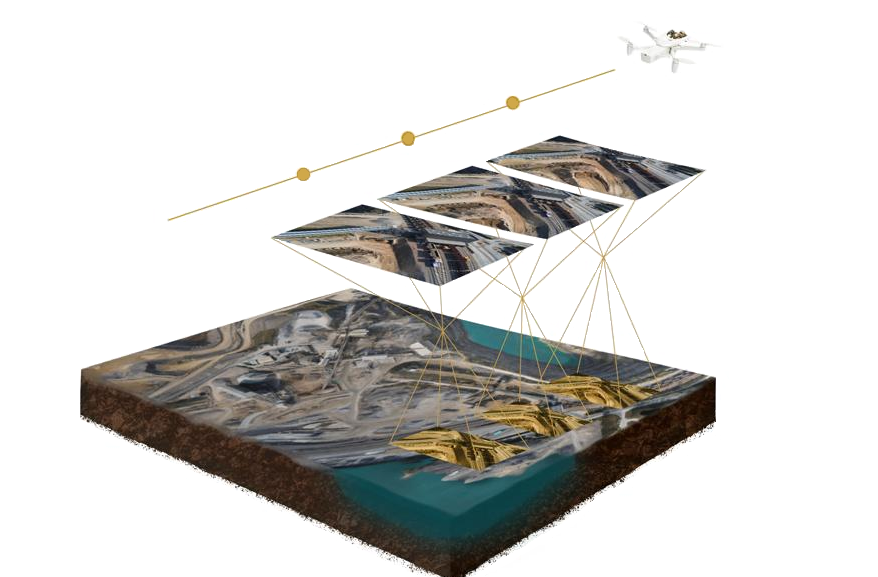
Fotogrametrija
Snimanje iz zraka bespilotnim letjelicama mijenja način na koji stručnjaci provode preglede i snimanje. Metode fotogrametrije koriste se za obradu slika prikupljenih bespilotnim letjelicama za izradu 2D i 3D modela, koji kasnije omogućuju korisnicima da pravovremeno zakažu održavanje pregledanih objekata.
4G pruža neviđenu pouzdanost podatkovne veze dronova. Korisnici mogu upravljati bespilotnim letjelicama na velikim površinama, u blizini metalnih konstrukcija, zgrada, bez straha od gubitka komunikacije.
Pregled i kartiranje
Kombinacijom AI -ja drona ANAFI Ai s internetskom platformom PIX4Dinspect, korisnici će moći provoditi inspekcije brže i učinkovitije nego ikad prije. ili. Algoritmi strojnog učenja prepoznaju antene na tornjevima stanica, određuju njihovu veličinu, visinu, nagib, azimut i okomitost.
Kliknite na donje slike da vidite demo 3D modele koje je generirao ANAFI Ai.
Primjer # 1

Primjer # 2
Matrica najbolje u klasi
Kamera bespilotne letjelice ANAFI Ai opremljena je CMOS senzorom od 1/2-inča od 48 MP izgrađenim korištenjem Quad Bayer tehnologije filtera u boji, koja je prikladnija nego ikad za pregled i fotogrametriju. Korištena matrica omogućuje vam dobivanje detaljnih slika sa širokim dinamičkim rasponom.
Fotografije visoke rezolucije
ANAFI Ai je sposoban generirati fotografije od 48 megapiksela, snimajući tako sve detalje u visokoj razlučivosti i stvarajući oblak točaka velike gustoće.
Značajna oštrina
Inspekcijske misije zahtijevaju sposobnost identificiranja sitnih detalja kao što su serijski brojevi, konektori, mrlje od hrđe i početne pukotine.
Širok dinamički raspon
10 koraka dinamičkog raspona u standardnom načinu rada, 14 koraka u HDR načinu rada. Optimalna gradacija slike bitna je za stvaranje dosljednih točaka oblaka i visokokvalitetne 2D ili 3D rekonstrukcije.
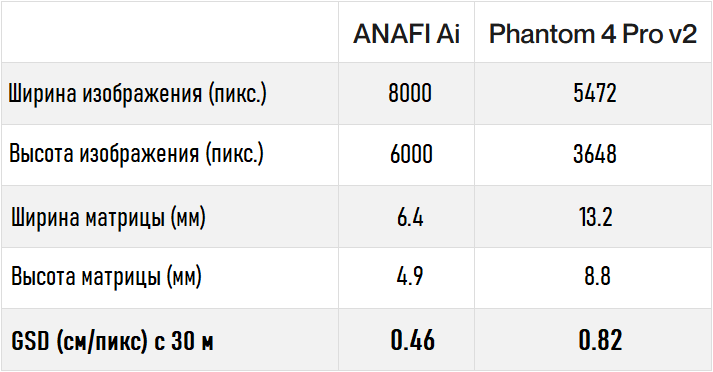
55% više detalja od senzora od 1 inča
ANAFI Ai 48 MP 1/2-inčni Quad Bayer senzor oštriji je od senzora od 20 MP od 1 inča koji se koristi u brojnim modernim profesionalnim bespilotnim letjelicama. Sljedeće slike iz pregleda krova ANAFI Ai i DJI Phantom 4 Pro V2.0 na istoj visini jasno pokazuju ovu činjenicu.

Idealno za inspekcije
ANAFI Ai gimbal uključuje 6-osni hibridni (mehanički elektronički) stabilizacijski sustav koji kompenzira fluktuacije leta i osigurava oštrinu slike. ANAFI Ai kamera ima podesivi raspon od -90 ° do 90 °, što je čini idealnim zračnim instrumentom za pregled donje strane postolja mosta.
Kontrolirani nagib ± 90 °
Točnost
ANAFI Ai omogućuje korisnicima postizanje GSD -a od 0,46 cm / px s visine od 30 m, što znači planimetrija relativne točnosti do 0,92 cm.
Za usporedbu, na istoj visini DJI Phantom 4 Pro V2 daje GSD od samo 0,82 cm / px. Drugim riječima, ANAFI Ai može mapirati isti cilj, leteći više od 1,5 puta više od Fantoma, s ekvivalentnom razinom detalja.
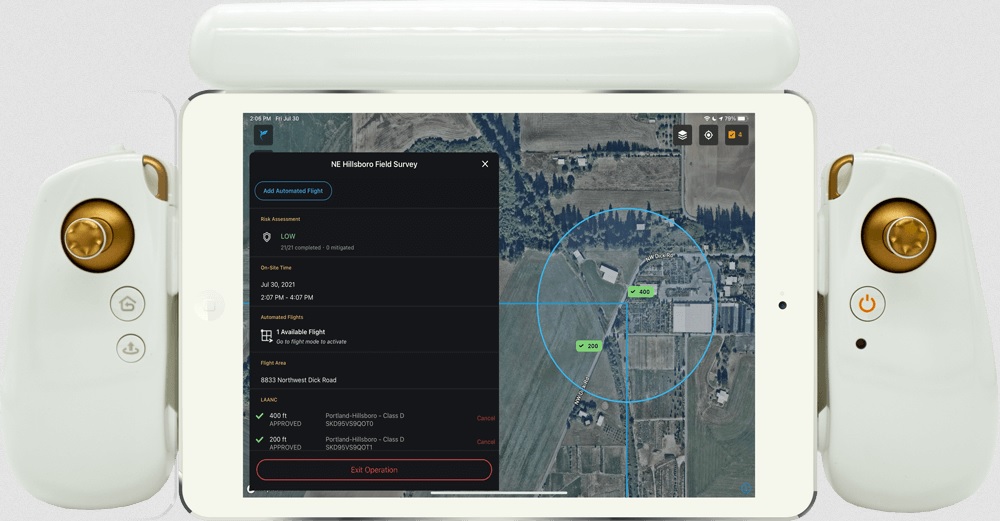
AI i 4G mogućnosti
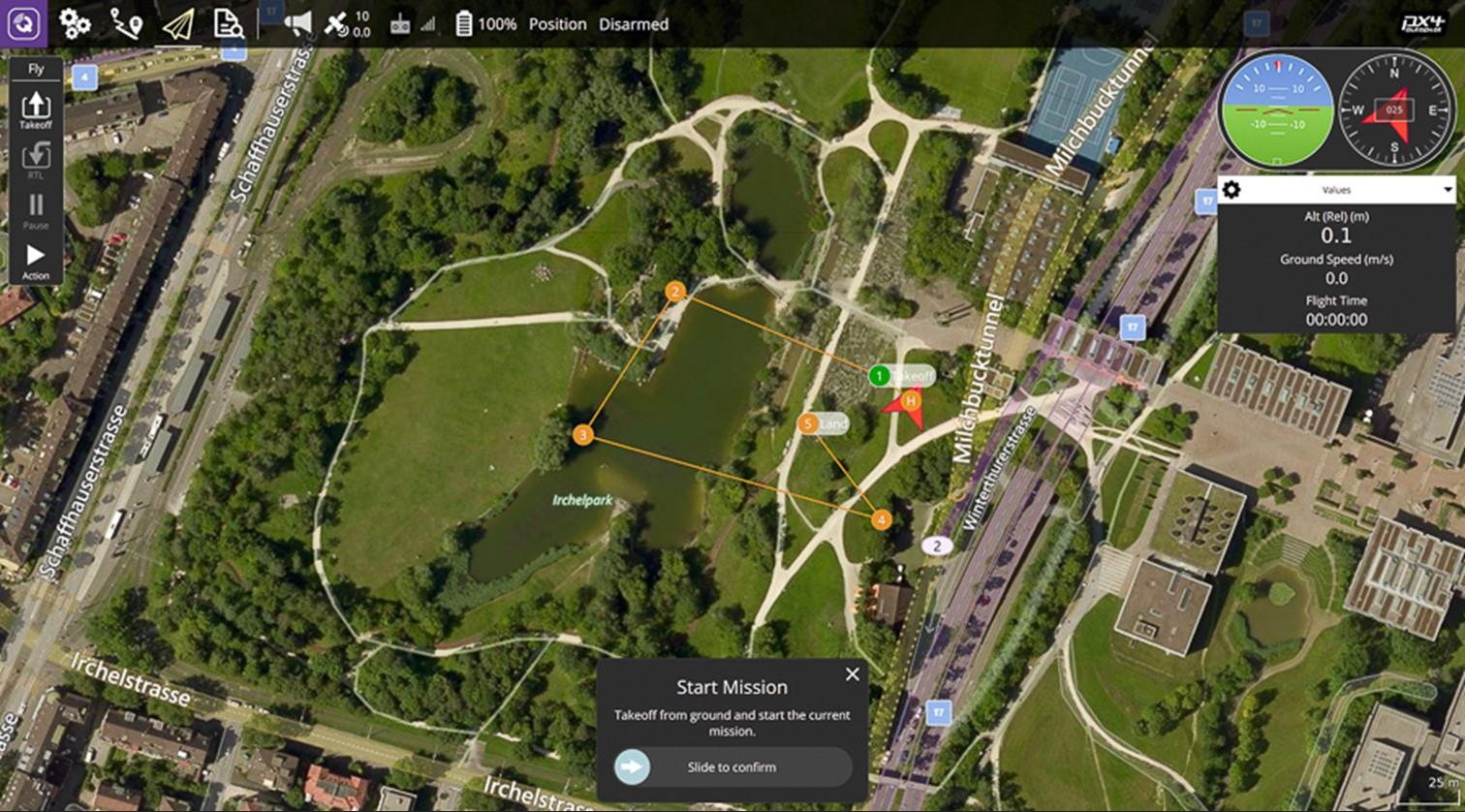
Jedna aplikacija. Bilo koji plan leta
Potencijal mobilne aplikacije FreeFlight 7 omogućuje korisniku pokretanje svih misija pregleda, pregleda i fotogrametrije.

Dostupni fotogrametrijski načini leta
Sljedeći fotogrametrijski načini leta sada su dostupni u mobilnoj aplikaciji FreeFlight 7:
- Mreža
- Dvostruka mreža
- Kružna
Izradite plan leta jednim dodirom
Jedan dodir na interaktivnoj karti FreeFlight 3D je sve što trebate za brzo skeniranje zgrade. Umjetna inteligencija automatski određuje optimalne parametre leta i putanju. Slike od 48 MP s točnim georeferenciranjem ANAFI Ai senzora (IMU, GNSS i vrijeme leta) omogućuju točnu 3D rekonstrukciju.
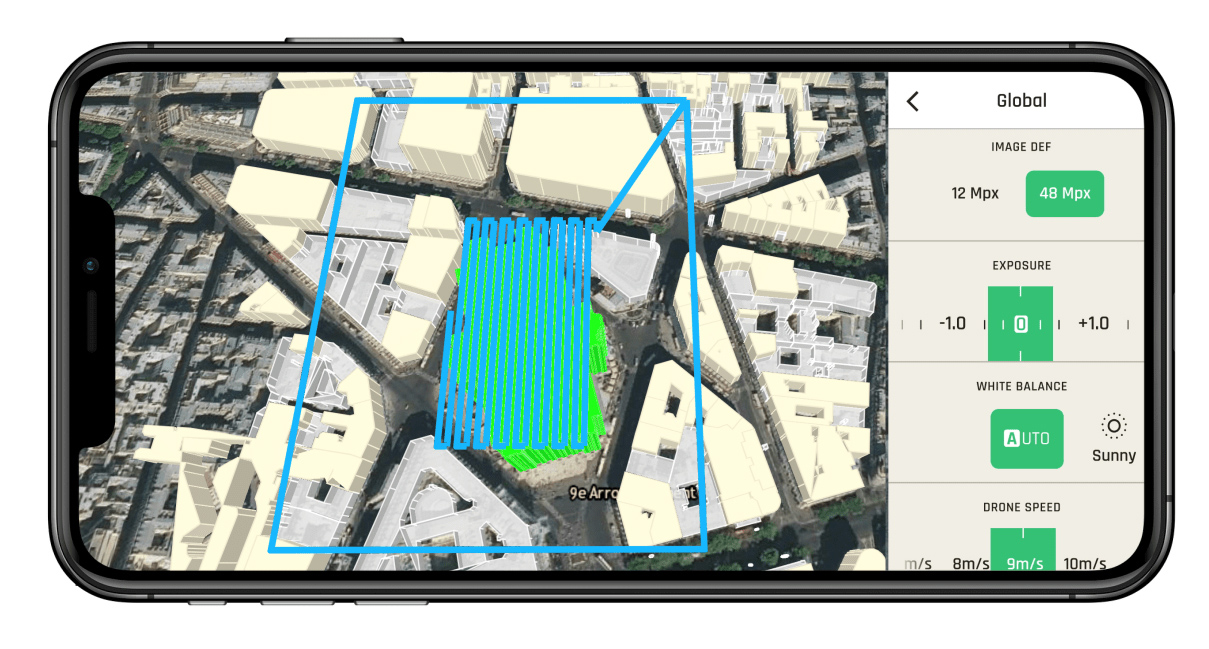 Automatski plan leta kreiran jednim dodirom u 3D zemljišnoj knjizi.
Automatski plan leta kreiran jednim dodirom u 3D zemljišnoj knjizi.
- Kartografska podloga FreeFlight 7 potječe iz softvera ArcGIS. Prikaz 3D zgrade temelji se na OpenStreetMap podacima koji pokrivaju gradove širom svijeta.
- Sustavi vizualizacije osiguravaju sigurnost određenog plana leta: korisnici se ne moraju brinuti o preprekama. ANAFI Ai ih autonomno izbjegava.
Autonomni let
ANAFI Ai višesmjerni senzorski sustav temeljen na stereoskopskom vidu automatski se orijentira u smjeru vožnje.

Bespilotna letjelica detektira prepreke udaljene 30 metara. AI tehnologija neprestano gradi i ažurira rešetku ispune tijekom izvršavanja zadanog plana leta. Predstavlja okruženje bespilotnih letjelica u vokselima.
Algoritmi određuju najbolju putanju za izbjegavanje sudara s preprekama, dok je bespilotna letjelica i dalje usredotočena na svoj cilj: dodijeljenu letnu misiju.

4G veza
ANAFI Ai prvi je komercijalni mikrodron opremljen 4G modulom. Pokriva više od 98% frekvencija koje se koriste u cijelom svijetu.

Pregled visokonaponskih dalekovoda. Snimljeno s ANAFI Ai, uređeno s Pix4Dmatic. Veličina scene: 4060 × 60 × 70 m. Broj slika: 2172. GSD: 1,3 cm / pix. Visina: 90 m. Prednje / bočno preklapanje: 90% / 65%.
Dron se može besprijekorno prebacivati s Wi-Fi-a na 4G i obrnuto, čime se osigurava najpouzdanija veza, što zauzvrat jamči:
- Sposobnost obavljati letove BVLOS -a
- Stabilna veza čak i kada letite u okruženjima s preprekama i zgradama
- Sigurno letenje u okruženjima s visokim šumom
- Kvaliteta video veze 1080p pri 30 fps
- ) Izravni prijenos slika na poslužitelje u oblaku

Optimizacija vremena leta
Prema riječima razvojnog programera, postignuta je značajna ušteda vremena performanse slike ANAFI Ai:
- 48 MP omogućuje bespilotnoj letjelici letenje više od 1,5 puta više od bespilotnih letjelica sa senzorima od 1 inča od 20 MP, dok postiže isti GSD. Drugim riječima, veća nadmorska visina i brža misija idu ruku pod ruku.
- 1 slika u sekundi: ANAFI Ai snima dva puta brže od Autel EVO 2 i DJI Phantom 4 Pro V2.0.
4G prijenos tijekom leta na PIX4Dcloud
U procesu stvaranja digitalnog modela iz zračnih snimaka bespilotne letjelice, prijenosa datoteka i obrade fotografije su dva zadatka koja oduzimaju puno vremena. ANAFI Ai pomaže korisnicima ubrzati radni tijek. Konkretno, sustav bespilotnih letjelica omogućuje:
- Prijenos slika na sigurne poslužitelje izravno u letu pomoću 4G veze drona.
- Odmah počnite s izračunavanjem objekata na kraju leta: ortomozaici, oblak točaka, modeli uzvisina i teksturirana mreža.
- Jednostavno dijelite 2D karte i 3D modele kvalitete snimanja sa zaposlenicima i korisnicima.
![]()
Kompatibilnost s PIX4D Suite
ANAFI Ai sada je potpuno kompatibilan s jedinstvenim paketom mobilnih, stolnih i aplikacija za fotogrametriju u oblaku koji se sastoji od:
Fotogrametrija ili lidar
Zašto odabrati fotogrametriju za snimanja i inspekcije? Uz pristupačnost i jednostavnost korištenja, zračna fotogrametrija najbolji je izbor kada je potrebno vizualno tumačenje podataka.
Profesionalci fotogrametrije
- Pruža više vizualizacija: ortomozaik, oblak točaka u boji, teksturirana mreža.
- Stvara oblak točaka veće gustoće, od kojih svaka sadrži značajnu količinu informacija (visina, tekstura, boja).
- Nadmašuje LIDAR u točnosti fotorealističnih 2D i 3D prikaza - LIDAR ne pruža visoku razinu kontekstualnih detalja.
LIDAR nedostaci
- Košta 100 puta više od UAV -a s RGB matricom.
- Složenost obrade podataka i moguće pogreške u tumačenju.
- Dodavanje podataka o boji moguće je, ali komplicira proces.
- LIDAR generira samo oblak točaka i namijenjen je za posebne slučajeve i situacije.
SDK
Parrot Software Development Kit je skup alata i softvera otvorenog koda za programere. Od stvaranja prvog drona A. R. Drone, softver otvorenog koda tvrtke podržava razvojne platforme i alate, a Parrot
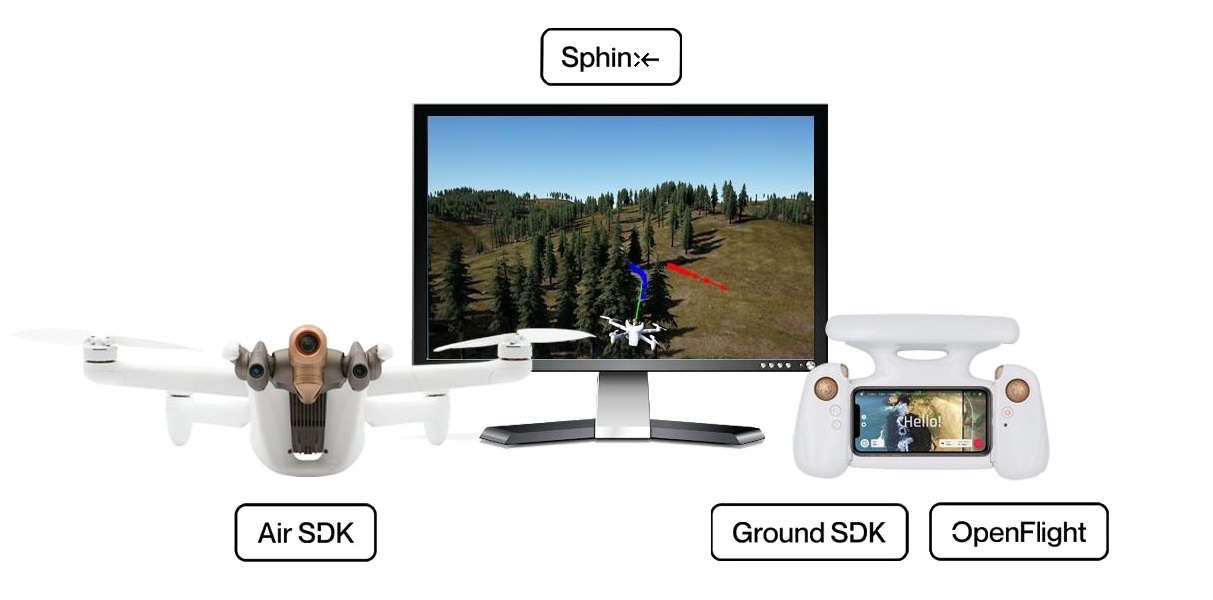
Programer pojašnjava da su svi SDK izvori tvrtke dostupni besplatno, bez registracije i praćenja, na portalu " Papagaj Portal za razvojne programere"... Također se možete pridružiti tisućama programera na Parrot forumu gdje možete izravno razgovarati o aktualnim temama s inženjerima tvrtke.
Air SDK
Pokrenite svoj kôd na ANAFI Ai
Air SDK pruža revolucionarnu arhitekturu tehnologije za preuzimanje i pokretanje koda izravno u ANAFI Ai. Programeri mogu programirati prilagođene letačke misije s pristupom svim senzorima bespilotnih letjelica, sučeljima za povezivanje i funkcijama autopilota.
Air SDK omogućuje pristup:
- svim senzorima (IMU, GPS, TOF) i načinima leta
- Video stream i metapodatke sa svim kamerama
- Komunikacijska sučelja Wi-Fi, 4G, USB
- Karte dubina i rešetke za punjenje
- Stvaranje putanje izbjegavanja prepreka
Svaki programer može:
- Promijeniti stanje drona stvaranjem letačkih misija
- Promijeniti navigacijski način
- Dodati ugrađene Linux procese (za na primjer, prijenos podataka putem 4G kanala ili korištenje računalnog vida)
Air SDK podržava programski jezik C ili Python. Air SDK dolazi s detaljnim vodičem za instalaciju i API dokumentacijom. Mnogi primjeri primjera ilustriraju sve mogućnosti koje nudi njegova jedinstvena arhitektura.
Ground SDK
Izgradite moćnu mobilnu aplikaciju
Ground SDK je softverska platforma Ground Control Station (GCS) za mobilni uređaji (podržani su i iOS i Android). Omogućuje svakom razvojnom programeru stvaranje mobilne aplikacije za ANAFI Ai za naknadnu kontrolu drona izravno s mobilnog uređaja. Sve BVS funkcije (kontrola, video, postavke) dostupne su putem API-ja koji je jednostavan za korištenje i potpuno dokumentiran.
OpenFlight
Open Source Ground Control Station
Po prvi put, Parrot otvara izvorni kod za svoju stanicu za zemaljsko upravljanje. OpenFlight je jezgra naše poznate aplikacije otvorenog koda FreeFlight 7. To omogućuje programerima da se usredotoče na dodavanje vlastite funkcionalnosti i odmah imaju aplikaciju profesionalnog izgleda spremnu za objavljivanje u AppStoreu.

OpenFlight sadrži:
- Sve UX FreeFlight 7
- Sve postavke sučelja
- Kôd za 3D vizualizaciju prepreka u stvarnom vremenu
- Kôd za upravljanje 4G komunikacijama
- OpenFlight je objavljen pod licencom BSD-3 s cjelovitim vodičem za instalaciju i opsežnom dokumentacijom.
Sfinga
3D fotorealistična simulacija
Parrot Sphinx je napredni alat za simulaciju dronova. Inženjeri tvrtke Parrot koriste ga za razvoj i testiranje svih značajki ANAFI Ai. Opći koncept je simulirati pravi firmver drona sa svim njegovim senzorima u vizualno i fizički realnom okruženju.

Parrot Sphinx omogućuje:
- Simulira sve kamere i senzore
- Simulira karte dubine i segmentaciju slike
- Krećite se kroz mnoge realistične 3D scene
- Povežite se s različitim vrstama daljinskih upravljača
- Koristite skripte za upravljanje simulacijom
- Dodajte pješake i vozila
- Vizualizirajte i zabilježite podatke o letu
- Podesite senzore zrakoplova i okolne fizičke elemente
- Kontrolirajte faktor stvarnog vremena
Papiga Sfinga izgrađena je na temelju naprednih standarda komponente:
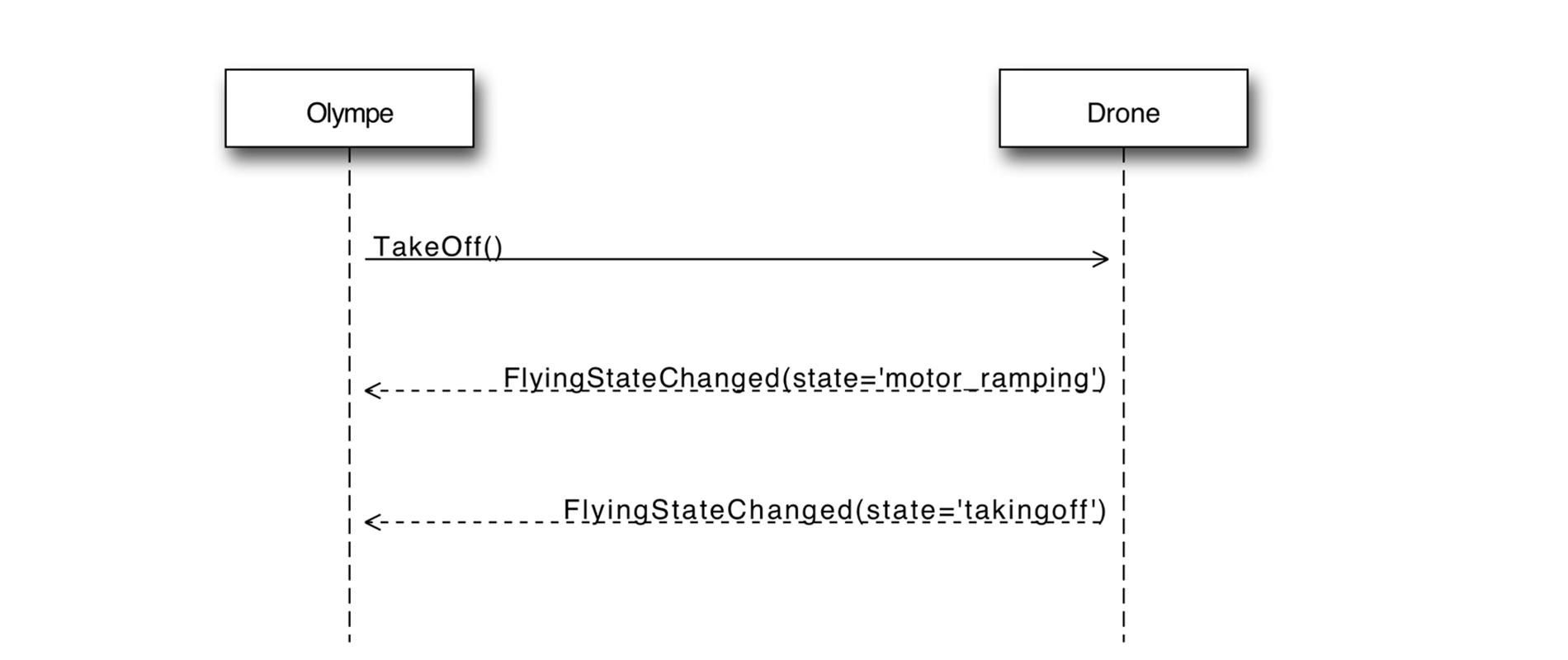
Olympe
Python za upravljanje ANAFI Ai
Olympe pruža programsko sučelje za Python kontroler za ANAFI Ai. Prvotna svrha Olympea bila je interakcija sa okruženjem za modeliranje Sphinx. Olympe također može kontrolirati fizički ANAFI Ai s udaljenog računala.
Olympe framework dopušta:
- Povezivanje sa simuliranim ili fizičkim ANAFI Ai
- Slanje naredbenih poruka (pilotiranje, orijentacija kamere, Povratak kući), Plan leta)
- Pokretanje i zaustavljanje streaminga videa sa svih kamera
- Snimanje videotoka i sinkroniziranih metapodataka
) PdrAW
Napredni Media Player
PDrAW je napredni preglednik videozapisa za ANAFI Ai medije. Preglednik podržava streaming (RTP / RTSP) i snimljeni (MP4) video na Linux, macOS, Android i iOS platformama. PDrAW dolazi kao knjižnica (libpdraw), biblioteka omotača (libpdraw-backend) i samostalna izvršna datoteka (pdraw).
PDrAW također upravlja video metapodacima. Na ANAFI Ai i streaming i snimljeni video sadržavaju metapodatke koji su javno dostupni i dokumentirani, što omogućuje naprednu obradu video zapisa iz zraka.
Modeli C. A. D.
Parrot nudi 3D modele svojih dronova za integraciju u vaš CAD dizajn za brzu izradu prototipova i integraciju dodatne opreme.
Kompatibilnost MAVLink i GUTMA
ANAFI Ai kompatibilan je sa standardnim protokolom otvorenog koda MAVLink v1, koji omogućuje razmjenu podataka u stvarnom vremenu između UAV-a i upravljačke postaje. ANAFI Ai može se upravljati ručno ili pomoću automatskog planiranja leta s bazne stanice kompatibilne s MAVLinkom, poput QGroundControl.
* Sučelje QGroundControl
ANAFI Ai kompatibilan je sa standardnim protokolom podataka o letu GUTMA otvorenog koda. Global UTM Association je konzorcij glavnih igrača na području kontrole zračnog prometa.

Najveći partnerski ekosustav za bespilotne letjelice Parrot
Parrot nastavlja širiti globalni ekosustav pružatelja softvera za dronove kroz svoj partnerski SDK program nudi specijalizirana i jedinstvena rješenja za rastuće i razvijajuće se potrebe profesionalnih korisnika.
Papagaj za sve poslovne potrebe
Kako bi izvukao maksimum iz procesa inspekcije, Parrot svojim klijentima nudi ekosustav kompatibilnog softvera za bespilotne letjelice, u rasponu od upravljanja flotom, kompilacijskih letova planiranje i uvoz zapisnika leta, prije snimanja, mapiranja, praćenja i analize primljenih podataka.
PIX4D × papiga
2D / 3D modeliranje. Jedinstven skup mobilnih, stolnih i aplikacija za fotogrametriju u oblaku.
Verizon x Skyward x Parrot
4G LTE rješenje za dronove u Sjedinjenim Državama. Prvi takve vrste ANAFI Ai robotski dron spojen na Verizon 4G LTE mrežu s unaprijed instaliranim programom Skyward. Otvara put za prijenos podataka u stvarnom vremenu, udaljenu implementaciju i letove izvan vidokruga.

Skyward × Parrot
Integracija i učenje unutar ANAFI kapaciteta. Platforma za upravljanje zrakoplovstvom, uključujući zračni prostor, pristup LAANC -u i obuku, opremu i povezivost za primjenu flote poslovnih bespilotnih letjelica.

DroneSense × Parrot
Izradite, upravljajte i povećajte svoje programe za dronove. Profesionalci iz bespilotnih letjelica u sektoru javne sigurnosti mogu koristiti cijeli paket mogućnosti DroneSense -a, posebno osmišljen za potrebe hitnih službi.

Parrot Ecosystem Partners

Parrot Affiliate Program
Razvojni programer predlaže proširenje mogućnosti njegov program za dronove integrirajući njihov SDK.
Kibernetička sigurnost
Povjerljivost podataka
Razvojni programer napominje da ne prikuplja bilo koji podatak bez pristanka korisnika. Odluka o tome hoće li podatke prenijeti na infrastrukturu Parrot ili ne, isključivo je na samim korisnicima. Podaci hostirani u Parrotu omogućuju korisniku da sinkronizira podatke o letu i planove letova između različitih uređaja, kao i olakšavaju podršku i omogućuju Parrotu da poboljša svoje proizvode.
ANAFI Ai usklađen je s Općom uredbom o zaštiti podataka Europske unije (GDPR) i ide dalje, na primjer, omogućuje vam brisanje svih podataka u 1 kliku, pružajući tako korisnicima najjednostavniju kontrolu. Ovaj problem jednim klikom riješen je u mobilnoj aplikaciji FreeFlight7 ili u postavkama privatnosti računa Parrot. Cloud. Tako korisnici u svakom trenutku mogu ne samo prestati razmjenjivati podatke, već i lako zatražiti njihovo brisanje.
Ako korisnik pristane na razmjenu podataka, njihova će se obrada provesti u potpuno transparentnom formatu, detaljno opisanom u Pravilima o privatnosti papiga.
Kad je ANAFI Ai spojen na Skycontroller 4 putem 4G -a, Parrot infrastruktura se koristi za uparivanje drona i daljinskog upravljača. Ako korisnik nije prijavljen na Parrot. Cloud račun, i dalje može koristiti 4G vezu s jedinstvenim privremenim računom. Kada koristite Parrot -ovu infrastrukturu za 4G uparivanje, video se šifrira pomoću ključa dogovorenog između drona i daljinskog upravljača, Parrot nema pristup nešifriranom videu.

U skladu s FIPS140-2 i sigurnim elementom CC EAL5
ANAFI Ai ima ugrađeni sigurnosni element Wisekey koji je u skladu s NIST standardom FIPS140-2 Razina 3 i Zajednički kriteriji EAL5 certificiran. Sličan sigurnosni element također je ugrađen u upravljački hardver Skycontroller 4.
Funkcije sigurnosnog elementa:
- Izvodi kriptografske operacije
- Pohranjuje i štiti povjerljive podatke
Koristi ECDSA privatni ključ s parametrima domene P521, jedinstven za svaki dron. Ne može se izvući iz sigurnosnog elementa. Potvrdu povezanu s ovim ključem potpisuje certifikacijsko tijelo.
Wisekey štiti integritet firmvera, pruža jedinstvenu identifikaciju bespilotnih letjelica za 4G uparivanje i jaku autentifikaciju te jedinstveni digitalni potpis fotografija snimljenih dronom.

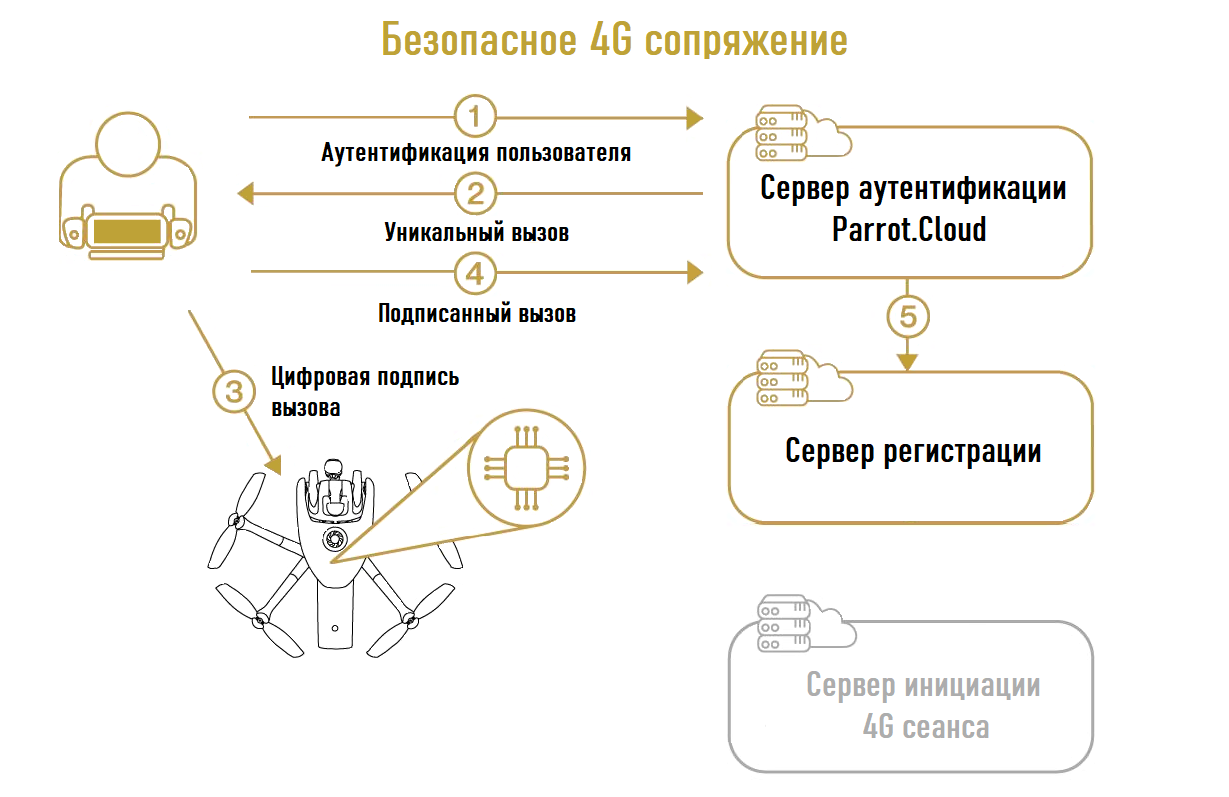
4G sigurna veza i jaka provjera autentičnosti
postupak sigurnog uparivanja uređaja. Tijekom tog procesa korisnik pouzdano potvrđuje da je povezan s određenim dronom. Zahvaljujući ANAFI Ai Secure Elementu, to može učiniti bez unošenja lozinke unutar drona.
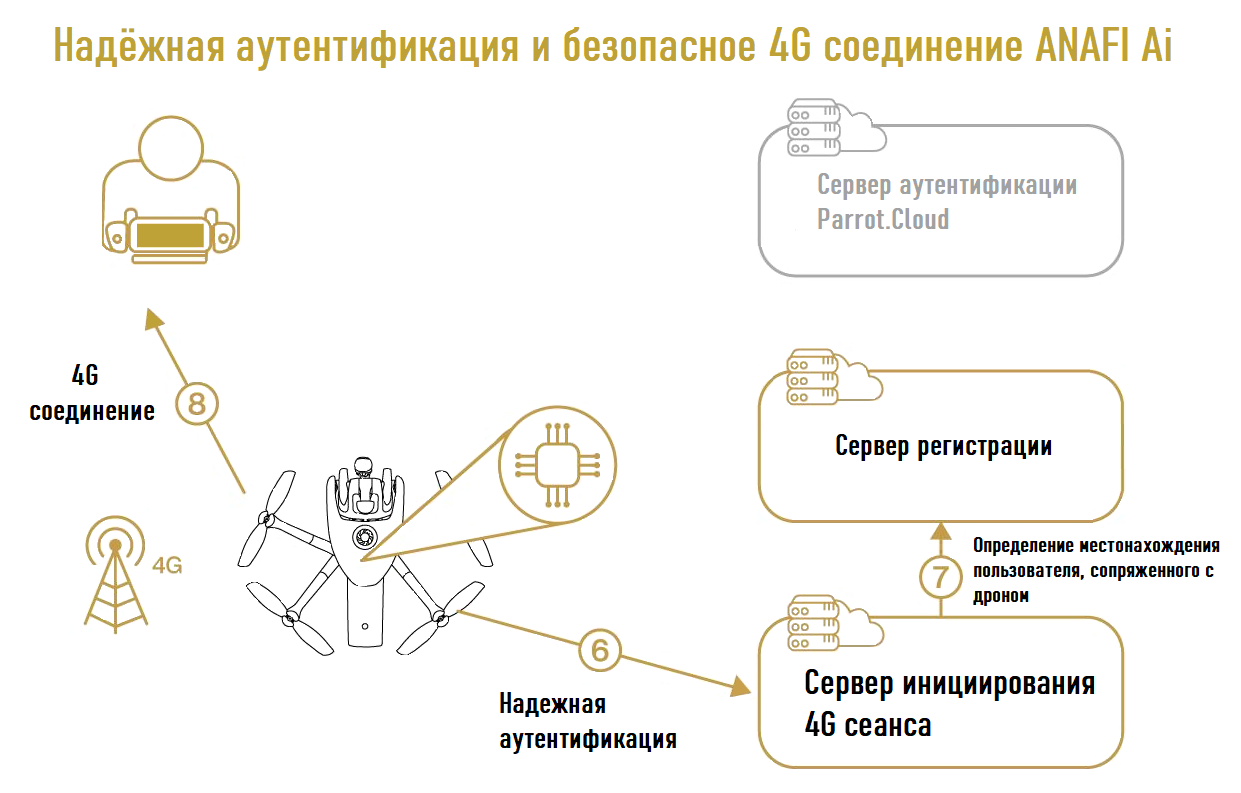
Papagajski poslužitelji tada registriraju komunikaciju između korisnika i drona. Kad se izgubi Wi-Fi veza između korisnika i drona, ANAFI Ai automatski će se prebaciti na 4G vezu. ANAFI Ai vrši jaku provjeru autentičnosti na poslužiteljima Parrot koristeći svoj privatni ključ pohranjen na sigurnom elementu. Papagajski poslužitelji traže povezane korisnike i pružaju sučelje između ANAFI Ai i Skycontrollera 4.
Radi zaštite bespilotnih letjelica i videotokova koji dolaze na Skycontroller 4, ANAFI Ai podržava TLS, DTLS i SRTP protokole.
Sigurna inicijalizacija i nadogradnja
Redoslijed pokretanja zrakoplova je zaštićen: sustav provjerava da koristi softver Parrot i da taj softver nije mijenjan. Sigurnosna provjera provodi se pri svakoj inicijalizaciji. Usluga ažuriranja također kontrolira digitalni potpis ažuriranja softvera.
Konfiguriranje korisničkih ključeva na sigurnom elementu
ANAFI Ai korisnici imaju pristup posebnom računu operatora Secure Element. Ovaj se račun koristi za postavljanje ključeva koji su relevantni za ovog korisnika. Korisnici mogu konfigurirati Secure Element s javnim ključevima davatelja misija kojima vjeruju. ANAFI Ai će izvoditi samo misije koje su potpisane ovim ključevima. Ovaj proces sprječava napadače u izvršavanju zlonamjernih misija leta na dronu.
Digitalno potpisane fotografije
Sigurni element iz ANAFI Ai može digitalno potpisati slike bespilotnih letjelica. Ovaj potpis dokaz je da je:
- Rečena potpisana slika snimljena naznačenim bespilotnim letjelicom.
- Ni sama slika ni njezini metapodaci nisu obrađeni (dobrovoljno ili ne) - metapodaci, poznati i kao EXIF i XMP, sadrže podatke o datumu, vremenu i lokaciji slike.

Drugim riječima, digitalni potpis štiti sve podatke vezane uz sliku, uključujući mjesto i vrijeme kad je snimljena, te koji ANAFI Ai dron.
Korisnici, kao i partneri koji nude softverska rješenja korištenjem fotografije bespilotnim letjelicama mogu provjeriti digitalni potpis fotografija ANAFI Ai bilo s certifikatom o dronu ili putem kataloga javnih ključeva koji je dostavio Parrot.
Transparentnost i tekuće sigurnosne provjere s bughtom
Parrot koristi standardne protokole i formate datoteka kad god je to moguće. Nema zataškanog koda ili skrivenih značajki. To omogućuje korisniku da razumije kako Parrot proizvodi rade i da testira njihovu sigurnost. Osim toga, OpenFlight, softver koji se koristi za upravljanje dronom, je otvorenog koda, dajući korisnicima potpunu kontrolu.
U travnju 2021. Parrot je pokrenuo Bug Bounty Program s YesWeHackom, prvom europskom sigurnosnom platformom prepunom izvora. Putem ovog partnerstva, Parrot koristi YesWeHackovu ogromnu istraživačku zajednicu u području kibernetičke sigurnosti kako bi identificirao potencijalne ranjivosti u svojim dronovima, mobilnim aplikacijama i web uslugama.
Program Bounty Bounty sastoji se od dvije faze:
Privatni programi u početku pružaju ekskluzivan pristup odabranim istraživačima sigurnosti i uključuju buduće modele bespilotnih letjelica Parrot. Iskustvo i raznolike vještine istraživača potvrdit će visoku razinu sigurnosti proizvoda prije njihovog izlaska na tržište, što će pomoći u poboljšanju sigurnosti korisnika Parrot i zaštite njihovih podataka.
Nakon ovog prvog kruga privatnog programa Bounty Bounty i nakon komercijalizacije, proizvodi idu u javni program. Njihovu sigurnost tada rigorozno provjerava cijela zajednica YesWeHack od preko 22 000 istraživača kibernetičke sigurnosti.

Upravljanje podacima
Parrot Cloud omogućuje korisnicima koji odluče podijeliti svoje podatke za upravljanje podacima o letu i floti, kao i multimedijskim sadržajima podatke koje su primili njihovi dronovi.
Prikupljeni podaci
Parrot Cloud prikuplja 4 vrste podataka:
Statički (podaci o proizvodu):
- Zrakoplovi serijski broj
- Serijski broj baterije
- Verzija firmvera zrakoplova i baterije
- Verzija hardvera zrakoplova i baterije
- Model uređaja
- Izdanje FreeFlight 7 Verzija
Događaji
- Upozorenja: Baterija, autopilot, senzori
- Komunikacija: spoj / prekid veze, početak streaminga, upozorenje na smetnje, slab signal
- Kamera: strujanje statistike, promjene postavki
- Let: promjena stanja (polijetanje, slijetanje, lebdenje itd.), aktiviranje letačkog zadatka (plan leta, fotogrametrija)
"Kontekstualne slike"
- Timelapse- snimak i (jednom u 2 minute)
- Duboko učenje (mapiranje više objekata, krajolika za poboljšanje autonomije leta, praćenje, izbjegavanje prepreka)
- Stereovizija (karta dubine)
- Slike se pokreću po događaju
- Početak i kraj preciznih izjava o lebdenju, precizno slijetanje
- Pad drona
- Lica se automatski zamagljuju tijekom prijenosa
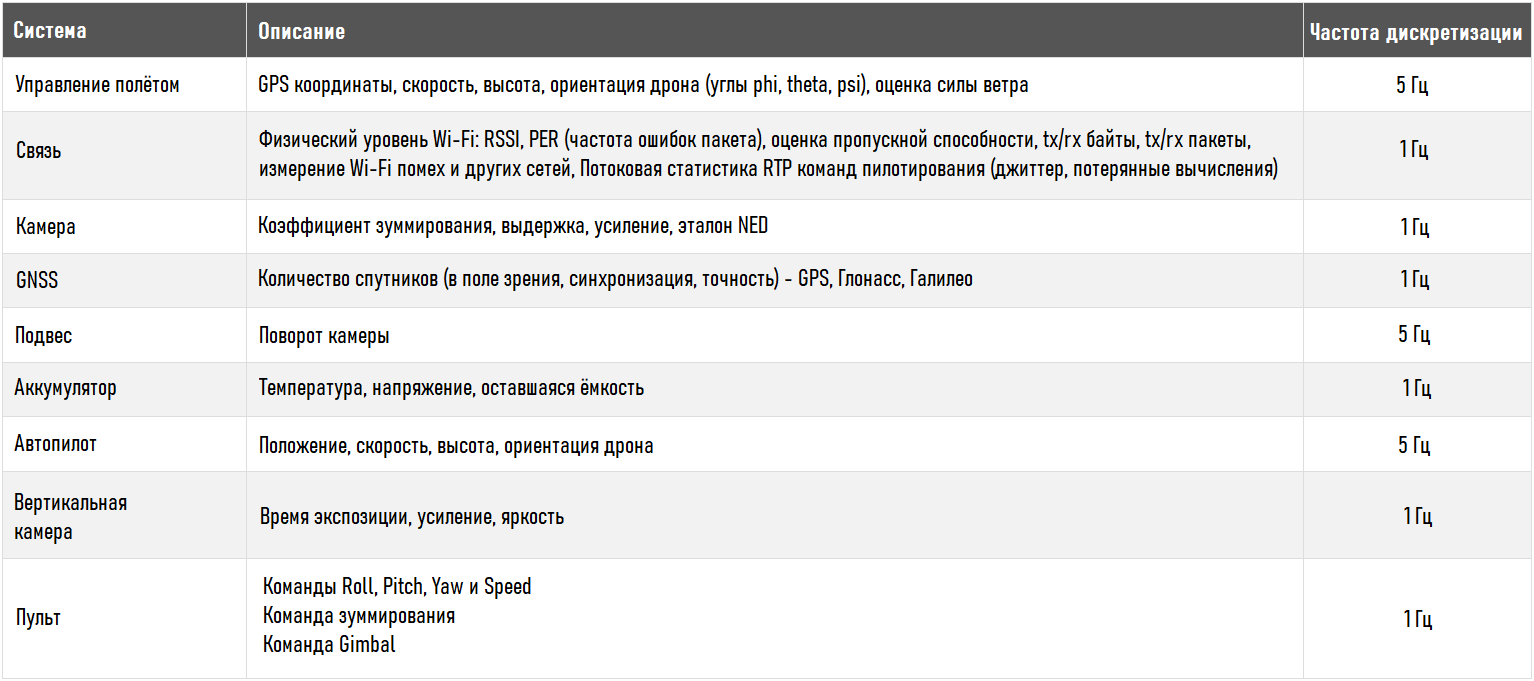
Telemetrija
Konačna upotreba prikupljenih podataka
Parrot prikuplja i koristi podatke samo od korisnika koji su se složili podijeliti ih radi poboljšanja kvalitete svojih proizvoda...
Upravljanje održavanjem
Preventivno održavanje: Naši alati prikupljaju sve podatke vezane za misije (vrsta misije, vrijeme polijetanja i slijetanja, broj misija, lokacija bespilotnih letjelica, brzina leta, plan leta i postavke AirSDK -a). To vam omogućuje da u stvarnom vremenu primate točne informacije o statusu flote bespilotnih letjelica ANAFI Ai (kao i njihovih kontrolera i baterija).
Korektivno održavanje: Prikupljene informacije korisne su za brzo utvrđivanje statusa određenog drona ili baterije.
Poboljšanje umjetne inteligencije (AI)
Elementi umjetne inteligencije ANAFI Ai (PeleeNet, konvolucijske mreže itd.) Korisnicima nude usluge i značajke bez premca: izbjegavanje prepreka, praćenje cilja, nekoliko načina leta. Kvaliteta umjetne inteligencije ovisi o količini i kvaliteti prikupljenih podataka (slika i video zapisa): ti podaci potiču strojno učenje. U tom pogledu, kvaliteta podataka nije jedini odlučujući element: metapodaci povezani s tim podacima također su temeljni. Iz tog razloga naš alat redovito prikuplja slike i metapodatke, ovisno o događajima, za ukupno 30 do 50 MB po minuti.
Karakteristike leta
Aerodinamičke karakteristike
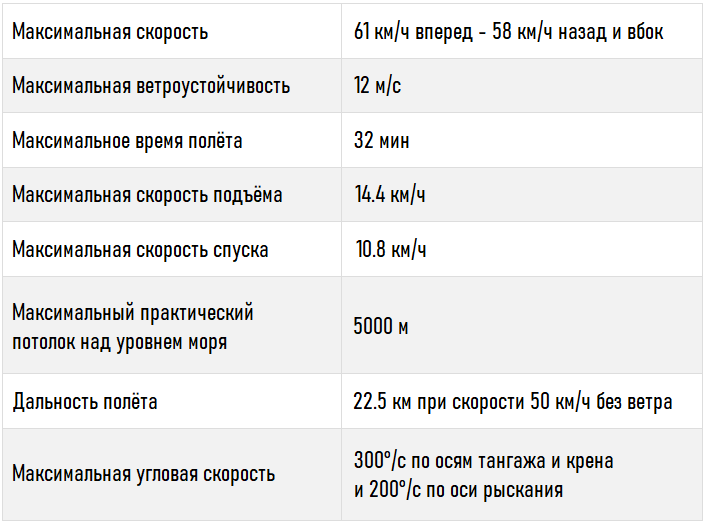
Pokreti i aerodinamika
 CFD slika lopatica propelera ANAFI Ai
CFD slika lopatica propelera ANAFI Ai
Nove lopatice propelera iz biomimikrije s grbovima sličnim kitovima. Ovaj pristup omogućio je povećanje pogonske učinkovitosti elektrane, koja je na izlazu osigurala povećanje potiska pri istoj brzini vrtnje. Taj je učinak usporediv s povećanjem promjera rotora.
Smanjuje se i zvučna buka, osobito tonska, koja izvire iz prednjeg ruba. Stoga je ANAFI Ai tiši [71,5 dB SPL (A) na 1 m] nego Skydio 2 [76,4 dB SPL (A) na 1 m]).
- Vrijeme leta duže od 32 minute
- Zahvaljujući optimiziranim aerodinamičkim karakteristikama trupa i pogonskom sustavu ANAFI Ai, najveća brzina u prednjem letu je 61 km / h, s bočni let i let unatrag 58 km / h
- Maks. otpor vjetra 12,7 m / s.
- Zahvaljujući visokoj učinkovitosti zakretnog momenta motora / elise i velikoj autonomiji baterije, domet je 22,5 km (pri konstantnoj brzini od 50 km / h po mirnom vremenu).
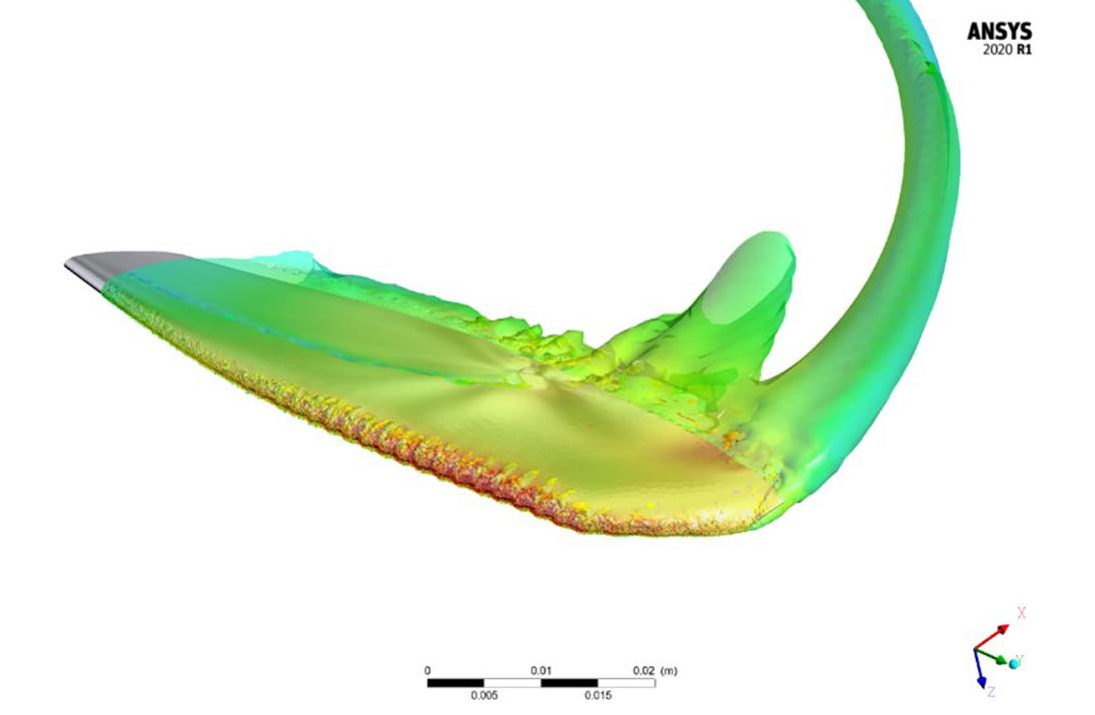
 CFD slike ANAFI Ai greda
CFD slike ANAFI Ai greda
Senzori
Kako bi se osigurao siguran let ANAFI Ai opremljen je:
- 2 × IMU (ICM-40609-D i ICM42605)
- Magnetometar LIS2MDL
- GPS modul UBX-M8030
- TI OPT3101 vrijeme leta (ToF)
- Barometar LPS22HB
- Okomita kamera
Karakteristike senzora
Letni IMU: ICM-40609-D
- 3-osni žiroskop
- Domet: ± 2000 ° / s
- Rezolucija: 16,4 LSB / ° / s
- Odstupanje / Točnost: ± 0,05 ° / s (nakon toplinske i dinamičke kalibracije)
- 3-osni akcelerometar
- Raspon: ± 16 g
- Rezolucija: 2.048 LSB / mg
- Odstupanje / točnost: ± 0,5 mg (XY) ± 1 mg (Z) (nakon toplinske i dinamičke kalibracije)
- Kontrola temperature s: kontrolirani sustav grijanja u odnosu na temperaturu okoline, stabiliziran unutar: ± 0,15 ° C
- Mjerna frekvencija: 2 kHz
Magnetometar: LIS2MDL
- Raspon: ± 49,152G
- Rezolucija: 1,5 mG
- Odstupanje / točnost: ± 15 mG (nakon kompenzacije, pri najvećoj brzini motora)
- Mjerna frekvencija: 100 Hz
Barometar: LPS22HB 1
- Raspon: 260 do 1260 hPa
- Rezolucija: 0,0002 hPa
- Odstupanje / točnost: ± 0,1 hPa
- Regulacija temperature: kontrolirani sustav grijanja u odnosu na temperaturu okoline, stabiliziran unutar: ± 0,2 ° C
- Mjerna frekvencija: 75 Hz
- Mjerni šum: 20 cm RMS
GNSS: UBX-M8030 1
- Keramička patch antena 25 × 25 × 4 mm, omogućujući poboljšanje pojačanja od 2 dB u odnosu na ANAFI 1
- Osjetljivost: hladni start -148 dBm / praćenje i navigacija: -167 dBm
- Vrijeme do prvog popravljanja: 40 sekundi
- Točnost / Točnost: Položaj (standardna devijacija 1,4 m), Brzina (standardna devijacija 0,5 m / s)
Okomita kamera
- Senzor slike format: 1/6 inča
- Rezolucija: 640 × 480 piksela
- Senzor slike s globalnim zatvaračem
- Crno -bijelo
- FOV: Horizontalni kut gledanja: 53,7 ° / okomiti kut gledanja: 41,5 °
- Žarišna duljina: 2,8 mm
- Mjerenje brzine optičkog toka na tlu pri 60 Hz
- 15Hz i precizno uklapanje @ 5Hz
ToF: TI OPT3101
- Domet: 0-15m
- Rezolucija: 0,3 mm
- Točnost b: ± 2 cm (nakon umjeravanja)
- Učestalost mjerenja: 64 Hz
Vertikalna kamera IMU: ICM-42605
- 3-osni žiroskop
- Domet: ± 2000 ° / s
- Rezolucija: 16,4 LSB / ° / s
- Odstupanje / točnost: ± 0,1 ° / s (nakon dinamike Kalibracija)
- 3-osovinski akcelerometar
- Raspon: ± 16g
- Rezolucija: 2.048 LSB / mg
- Odstupanje / točnost: ± 2.0 mg (XY) ± 5,0 mg (Z) - nakon dinamičke kalibracije
- Frekvencija mjerenja: 1 kHz
- Hardverska sinkronizacija s vertikalnom kamerom, točnost: 1 μs
Autopilot
ANAFI Ai kontrolor leta omogućuje jednostavno i intuitivno pilotiranje: nije potrebna obuka za upravljanje njime. Omogućuje vam automatiziranje mnogih načina leta (Plan leta, Snimatelj, Ručno polijetanje, Smart RTH). Algoritmi fuzije senzora kombiniraju podatke sa svih senzora za procjenu ANAFI Ai omjera, nadmorske visine, položaja i brzine.
Procjena stanja bitna je za pravilno funkcioniranje bespilotnih letjelica. Quadcopteri su inherentno nestabilni kada se kontrolor leta koristi s otvorenom petljom; za njihovo jednostavno upravljanje, a da ne govorimo o autonomnom upravljanju, potrebno ih je stabilizirati pomoću algoritama upravljanja zatvorene petlje. Ovi algoritmi izračunavaju i šalju naredbe motorima koje zahtijeva ANAFI Ai za postizanje željenih putanja.

Let u zatvorenom prostoru
U nedostatku GPS signala, ANAFI Ai se prvenstveno oslanja na okomita mjerenja kamere za procjenu brzine i položaja. Performanse okomite kamere određuju dva glavna algoritma:
- Optički tok za procjenu brzine
- Otkrivanje i usklađivanje ključnih točaka za procjenu položaja
Okomita kamera algoritmi mogu raditi u uvjetima slabog osvjetljenja zahvaljujući ANAFI Ai opremljenom parom LED svjetala smještenih uz vertikalnu kameru. Omogućuju da dron ostane stabilan, osobito tijekom leta u zatvorenom prostoru ili u odsutnosti GPS -a, na nadmorskoj visini manjoj od 5 m. Snaga LED svjetla se automatski prilagođava, ovisno o potrebama algoritma.
Autonomni let
Ključne značajke
- Rotacijski osjetljivi sustav sa širokim vidnim poljem
- Izvlačenje dubine okolnog prostora na temelju stereo poravnanja i dubine pokretom
- Prikaz okoliša u obliku rešetke punjenja
- Autonomno otkrivanje i izbjegavanje prepreka na brzine do 29 km / h
Ovo poglavlje detaljno opisuje senzore, hardver i algoritme koje ANAFI Ai koristi za omogućavanje autonomnog leta. Organiziran je na sljedeći način:
- Detaljan opis sustava percepcije ANAFI Ai
- Perceptivni algoritmi koji se koriste za rekonstrukciju 3D okruženja koje okružuje bespilotne letjelice
- Raspored i prepreka izbjegavanje

Strategija sustava percepcije
Percepcija trodimenzionalnog okruženja ključna je sposobnost za postizanje autonomnog leta, osobito u skučenim prostorima. To je preduvjet za zajamčeno otkrivanje i izbjegavanje prepreka, čime se smanjuje opterećenje operatora drona, povećava uspjeh misije i osigurava sigurnost zrakoplova.
Oslobađanje punog potencijala leteće kamere, koja se može slobodno kretati i rotirati u svim smjerovima bez ograničenja, zahtijeva učinkovito rješenje za otkrivanje. Konkretno, senzorski sustav trebao bi moći primati informacije o okolišu u smjerovima koji odgovaraju kretanju naprijed u letu - bez obzira na orijentaciju kamere.
ANAFI Ai oslanja se na jedinstveno tehničko rješenje koje se temelji na dva mehanička gimbala za odvajanje orijentacije glavne kamere i senzorskog sustava:
- Glavna kamera postavljena je na 3- osovinski kardan, čineći ga 3D orijentacijom neovisnom o orijentaciji drona.
- Sustav sensinga postavljen je na jednoosni kardan - povezan s kretanjem bespilotne letjelice, može se orijentirati u bilo kojem smjeru.
 ANAFI Ai dvostruki stabilizator za percepciju i vizualizaciju.
ANAFI Ai dvostruki stabilizator za percepciju i vizualizaciju.
Osi nagiba dviju vješalica kolinearne su i kombinirane kako bi se postigao ultrakompaktan dizajn.
Zahvaljujući ovom rješenju, moguće je usmjeriti glavnu kameru i senzorski sustav u dva različita smjera. Ovaj dizajn izbjegava potrebu za skupim kamerama sa strane, odozgo, odozdo i sa stražnje strane bespilotne letjelice, a istovremeno pruža veliko vidno polje za osjetni sustav.
Ovaj je odjeljak organiziran na sljedeći način:
- Pojedinosti o senzorima koji se koriste za senzorski sustav
- Specifikacije i za gimbal glavne kamere i za sustav senzora gimbal
- Strategije za ciljanje osjetnog sustava kako bi se iskoristio potencijal dvostruke strukture ovjesa
Senzori
Sustav osjetljivosti temelji se na paru identičnih kamera s jednom osi visine...
 1-osna mehanička šarka za osjetni sustav ANAFI Ai.
1-osna mehanička šarka za osjetni sustav ANAFI Ai.
Specifikacije senzora su sljedeće:
- Model: Onsemi AR0144CSSM28SUD20
- Boja: Jednobojno
- Rezolucija: 1280 × 800 piksela
- Brzina kadrova: 30 fps
- Globalni zatvarač
- Potpuno horizontalno vidno polje: 118 ° (110 ° upotrebljivo za otkrivanje)
- Potpuno okomito vidno polje: 72 ° (62 ° upotrebljivo za otkrivanje)
- Žarišna duljina: 1,47 mm (0,039 inča - 492,94610 piksela)
- Otvor blende: f / 2,7
Specifikacije stereo parovi su sljedeći:
- Os zajedničke visine
- Osnovna linija / udaljenost: 62 mm (2,44 inča)
- Sinkrono snimanje pri 30 fps

Dvostruki gimbal
Mehanički gimbal glavne kamere je troosni mehanički pitch-rol klizanje "sa sljedećim karakteristikama:
- Ograničenja nagiba: -116 ° / 176 °
- Ograničenja kotrljanja: / -36 °
- Ograničenja klizanja: / - 48 °
Mehanički ovjes senzorskog sustava je jednoosni ovjes sa sljedećim karakteristikama:
- Krajnji zaustavljači u nagibu: -107 ° / 204 °
- Vrijeme putovanja od jednog kraja do drugog kraja: 300 ms
Sustav osjetljivosti ima hod od 311 ° (od čega tijelo drona ne maskira 296 °), što omogućuje unatrag percepcija.
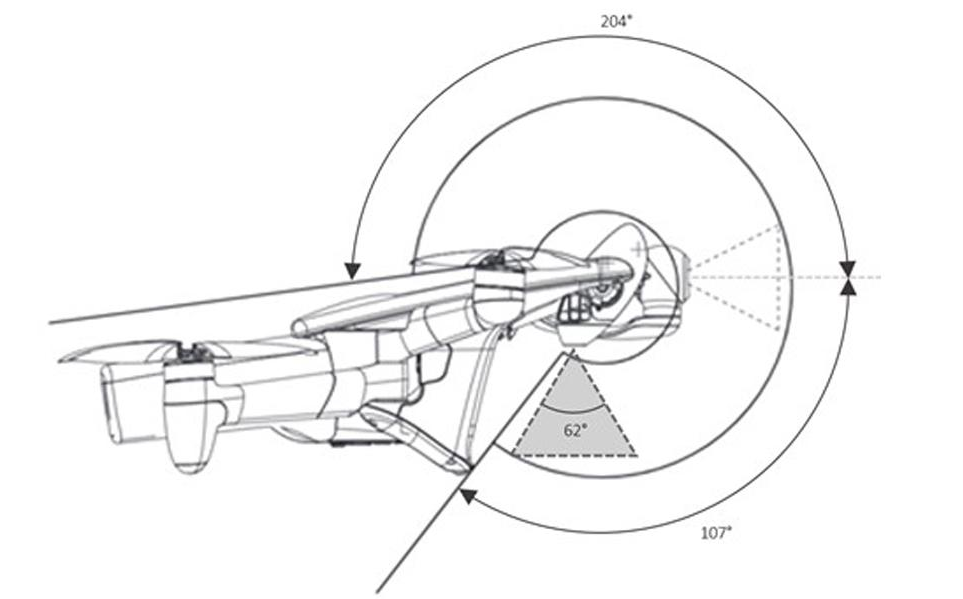
Trenutno okomito vidno polje i ograničavajući sustavi percepcije ANAFI Ai.
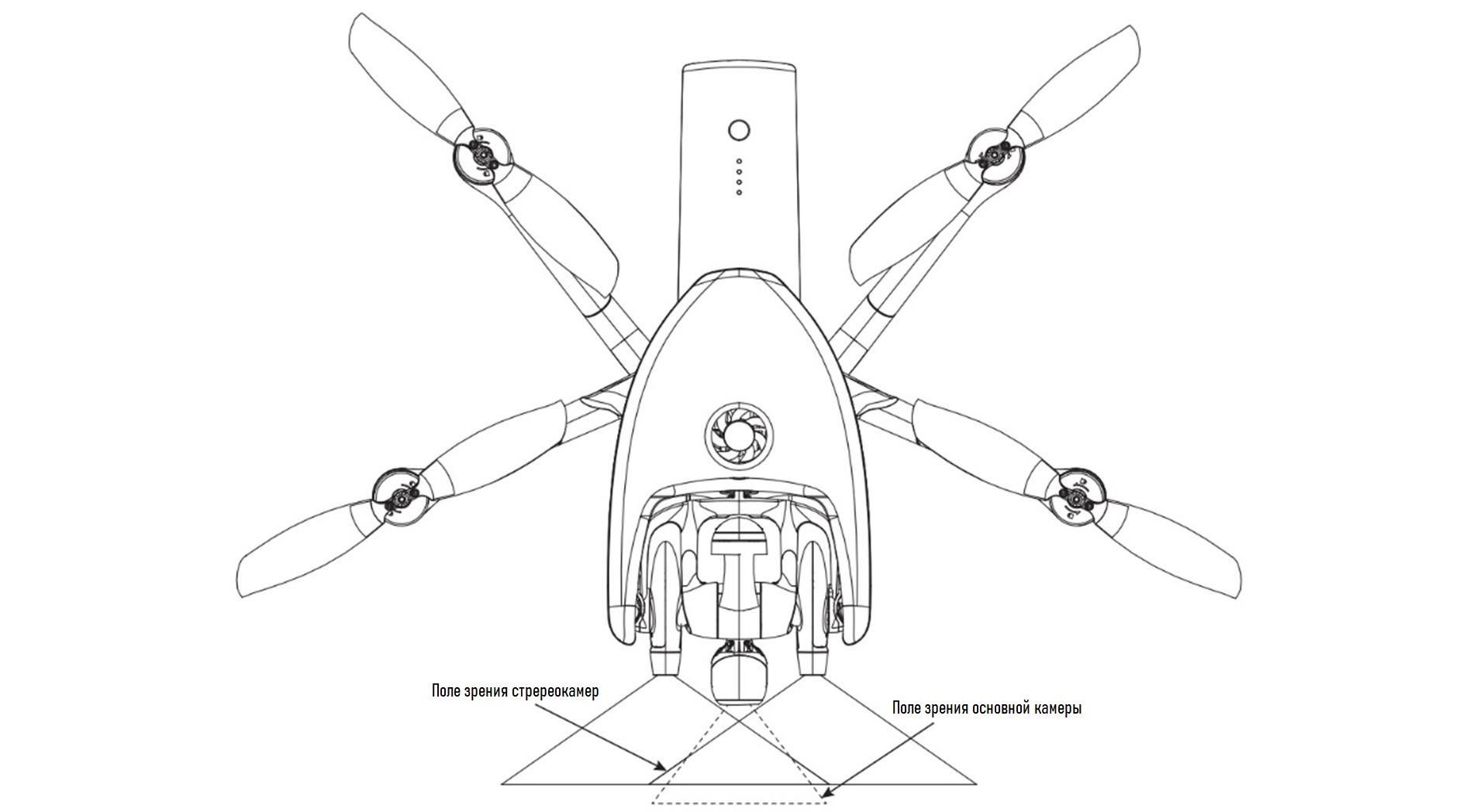
Sustav je konstruiran na takav način da:
- Lopatice propelera ne ulaze u vidno polje glavne kamere
- Glavna kamera ne pokriva vidno polje percepcijskog sustava
- Glavna kamera i senzorski sustav mogu se potpuno preklopiti unatrag radi zaštite leća
 Vodoravno vidno polje sustava percepcije ANAFI Ai.
Vodoravno vidno polje sustava percepcije ANAFI Ai.
Prilikom naginjanja unatrag, sustav percepcije pomiče se u najviši položaj, pružajući tako jasan pregled.
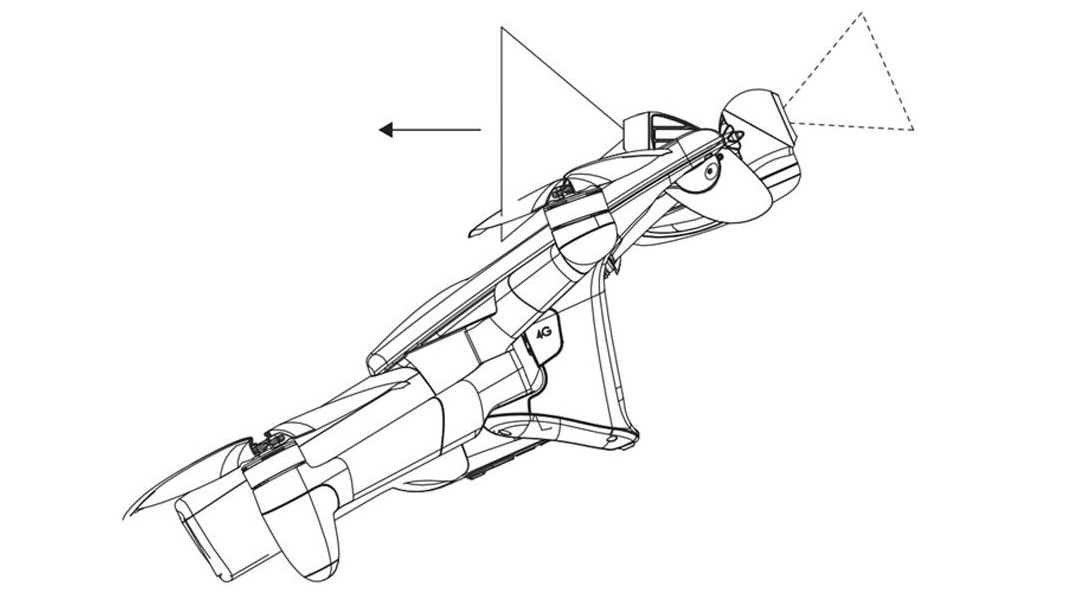
Opažanje ANAFI Ai u potpuno ležećem položaju za let unatrag.
Rekonstrukcija okoliša
Rekonstrukcija okolnog trodimenzionalnog okruženja za autonomni let izvodi se u dvije faze:
- ) Izdvajanje informacija o dubini iz percepcije u obliku zemljopisnih karata
- Kombiniranje podataka karte dubine u trodimenzionalnu mrežu ispune
Dvije se metode koriste za dobivanje karata dubine od senzora percepcije:
- Dubina temeljena na stereo poravnanju
- Dubina od pokreta
Dubina iz stereo korespondencije
Glavna metoda vađenja dubine informacije se temelje na paralaksi između dvije stereo kamere senzorskog sustava. Fotografiranjem okoliša u jednom smjeru, ali s dva različita položaja, objekti u vidnom polju percepcijskog sustava pojavljuju se u različitim položajima na slikama dobivenim dvjema kamerama. Što je subjekt bliži, razlika u položaju je veća.
Dakle, strategija je odrediti točke na slikama dobivene lijevom i desnom stereo kamerom koje odgovaraju istom objektu u vidnom polju osjetnog sustava, te mjeriti razliku u položaju ovih točke na dvije slike. Ta se razlika naziva disparitet i mjeri se u broju piksela.
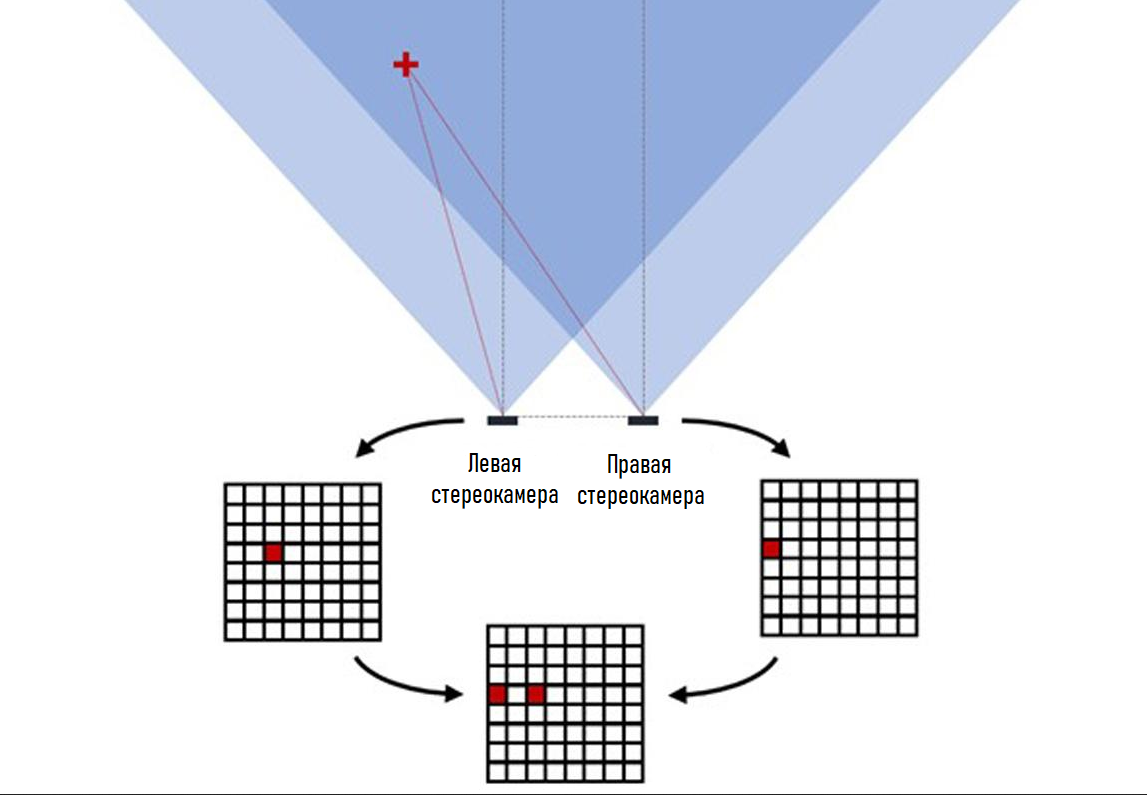 Ilustracija principa stereo vida - crvena 3D točka nalazi se u različitim položajima na lijevoj i desnoj slici.
Ilustracija principa stereo vida - crvena 3D točka nalazi se u različitim položajima na lijevoj i desnoj slici.
Odstupanje se tada može povezati s dubinom svake od ovih točaka pomoću sljedeće dubine odnosa = žarišna * osnovna linija / razlika, gdje su dubina i osnovna linija izražene u istim jedinicama, a žarišna vrijednost duljina i razlika izraženi su u broju piksela.
Rezultat izračuna ima oblik karte dubine od 176 × 90 piksela, za koju vrijednost svakog piksela odgovara dubini u metrima. Karta dubine osvježena je na 30 Hz.
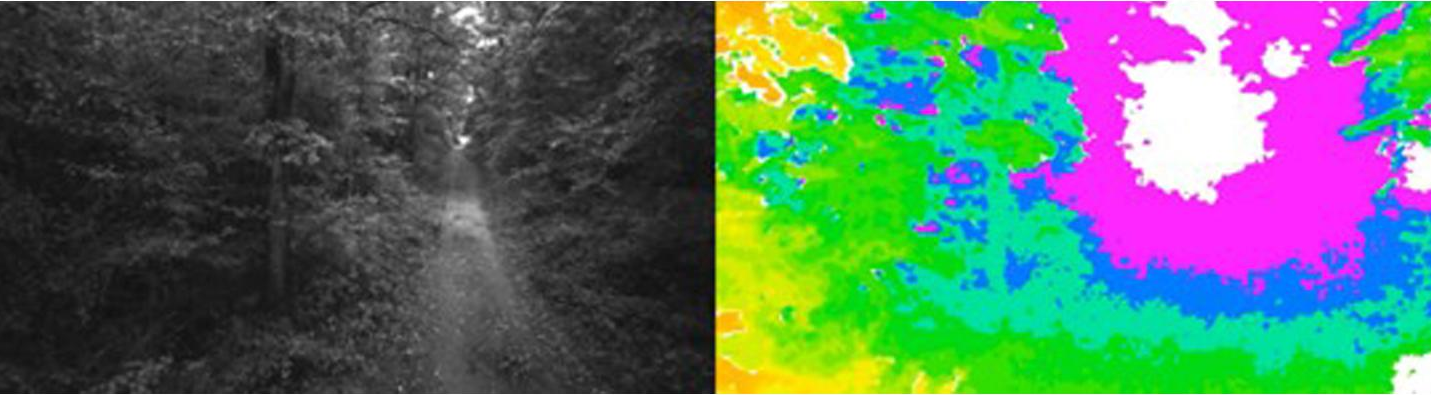
Primjer slike snimljene desnom kamerom senzorskog sustava ANAFI Ai (lijevo) i odgovarajuća dubina dobivena stereo snimanjem (desno). Karta boja ide od crvene (Bliže) do ljubičaste (Dalje) - bijela znači Izvan dosega.
Neposredni rezultat toga je da je dubina izmjerena ovom metodom diskretizirana, budući da razlika može uzeti samo diskretne vrijednosti (broj piksela). 3D točka koja se nalazi dovoljno daleko od sustava percepcije i stvara teoretski disparitet manji od jednog piksela smatrat će se beskonačnom, budući da će odgovarajuća stvarna diskretna razlika biti jednaka 0. Točnost metode stereo usporedbe opada s povećanjem udaljenosti, iako postoji su metode koje mogu smanjiti ovaj fenomen postizanjem uzorkovanja podpiksela.
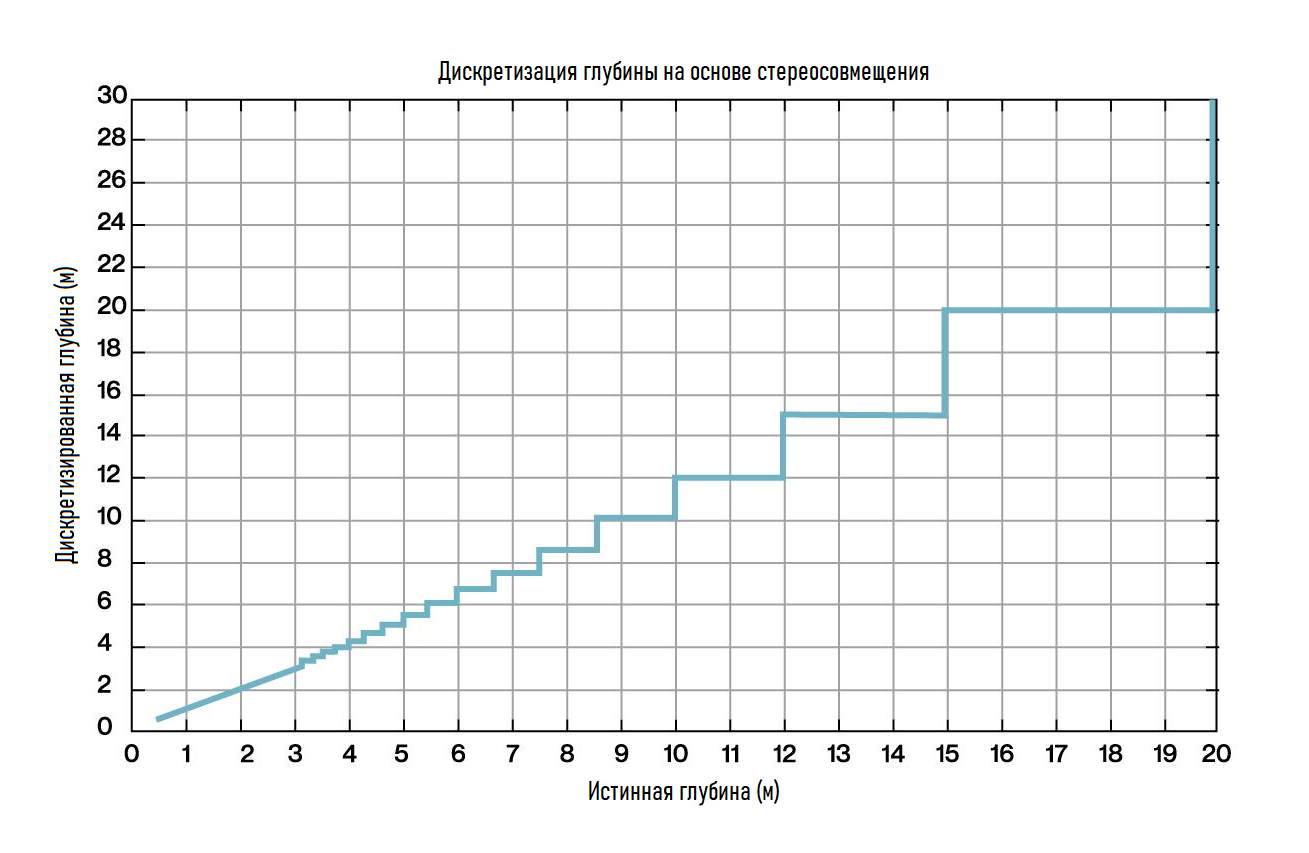 Diskretizirana dubina mjerena "stereo poravnanjem" naspram "prave dubine".
Diskretizirana dubina mjerena "stereo poravnanjem" naspram "prave dubine".
Osim toga, razlika se razlikuje kako se dubina približava nuli. Budući da je broj piksela na slikama ograničen, razlika je također ograničena. Kao posljedica toga, postoji minimalna dubina na kojoj je percepcijski sustav slijep. Ova minimalna dubina iznosi 36 cm za ANAFI Ai.
O kalibraciji: Svaki par stereo kamera tvornički je kalibriran kako bi točno izmjerio male razlike koje mogu postojati između dviju kamera i kompenzirao ih u proračunima dubine na ploči.
Korisnik također može ponovno kalibrirati par stereo kamera pomoću ispitnog uzorka isporučenog s dronom. Konkretno, u određenoj mjeri bespilotna letjelica može otkriti potencijalne pogreške u kalibraciji koje se mogu pojaviti tijekom njegova života. U tom slučaju softver zrakoplova će ih pokušati prilagoditi i kompenzirati, a ako to ne uspije, pojavit će se obavijest u kojoj se traži ponovna kalibracija.
Dubina od kretanja
Kretanje drona se također može koristiti za prikupljanje slika okoliša iz različitih kutova i na taj način rekonstruirati podatke o dubini. Ova se tehnika naziva dubina iz pokreta ili monokularno osjetljivost, jer je jedna pokretna kamera dovoljna za prikupljanje informacija o dubini.
Princip rada sličan je stereo viziji, ali umjesto usporedbe slika okruženja koje su dobili različiti promatrači u isto vrijeme, percepcija uspoređuje slike okoliša koje je isti promatrač dobio u različito vrijeme. Ako se dron kreće, tada će slike ovog jedinstvenog promatrača biti snimljene iz različitih kutova. Poznavajući položaj u kojem je snimljen svaki kadar, moguće je triangulirati točke koje odgovaraju istoj značajci na različitim slikama i vratiti ih u 3D.
Izlaz je trodimenzionalni oblak točaka koji sadrži do 500 točaka za ANAFI Ai, generiran na frekvenciji od 10 Hz.
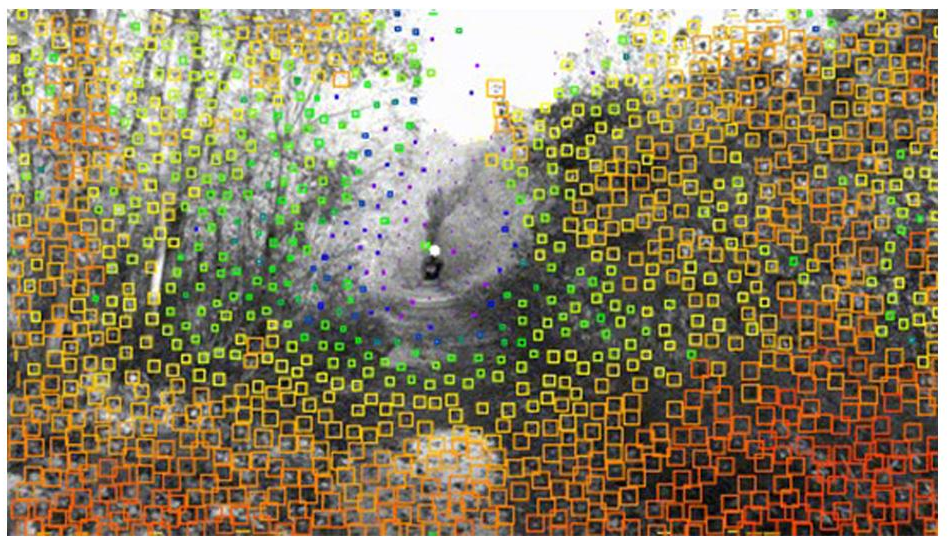 Primjer oblaka točaka stvorenog na temelju dubine od kretanja - karta boja ide od crvene (Bliže) do ljubičaste (Dalje).
Primjer oblaka točaka stvorenog na temelju dubine od kretanja - karta boja ide od crvene (Bliže) do ljubičaste (Dalje).
ANAFI Ai algoritam dubine kretanja obično generira manje informacija (rijetki oblak točaka) od algoritma stereo podudaranja i zahtijeva da se bespilotna letjelica pomakne radi prikupljanja informacija. Osim toga, ovaj algoritam ne može izvući informacije u točnom smjeru kretanja (barem za izravne prijenose), budući da se objekti na slikama čine gotovo stacionarnima u tom smjeru (fokus proširenja).
Međutim, ima bolji raspon detekcije (teoretski beskonačan raspon) od stereo podudaranja.
Fill Grid
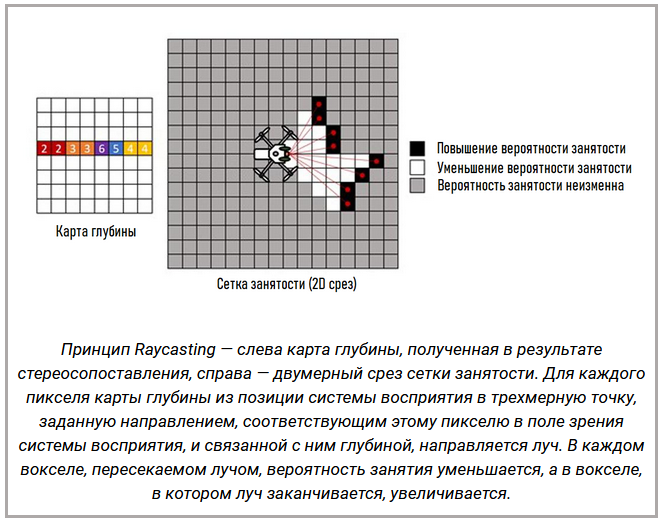
Podaci o dubini iz stereo i monokularnih senzorskih algoritama integrirani su u Fill Grid. Ova mreža uzorkuje 3D okruženje u 3D kocke nazvane vokseli. Svakom vokselu dodjeljuje se vjerojatnost da ga zauzme prepreka ili, obrnuto, da nema prepreke.
Algoritam prijenosa zraka koristi se za integraciju informacija o dubini u rešetku ispune. Za svaki piksel karte dubine dobiven kao rezultat stereo usporedbe pretvara se u trodimenzionalnu točku, a za svaku točku oblaka točaka - u dubinu dobivenu kao rezultat kretanja:
- Zraka je nacrtana u rešetki za punjenje od položaja percepcijskog sustava do položaja 3D točke.
- Povećava se vjerojatnost zauzimanja voksela koji sadrži 3D točku.
- Vjerojatnost da su zauzeti svi vokseli koje prelazi zraka osim one koja sadrži 3D točku je smanjena.
Dakle, mreža djeluje kao vremenski filter za informacije o dubini, apsorbira bilo koji potencijalni šum pri mjerenju dubine, te kao memorija prethodnih mjerenja, što omogućuje možete se kretati u teškim okruženjima čak i ako nema stalnog vidnog polja od 360 ° u sustavu percepcije.
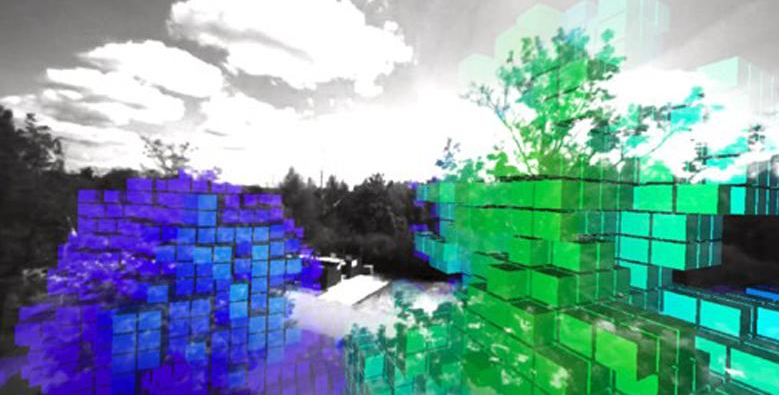 Primjer rešetke za popunjavanje. Vokseli se postavljaju na desni prikaz stereo kamere s visokim stupnjem sigurnosti da su zauzeti, u rasponu od crvene (blizu) do ljubičaste (daleko).
Primjer rešetke za popunjavanje. Vokseli se postavljaju na desni prikaz stereo kamere s visokim stupnjem sigurnosti da su zauzeti, u rasponu od crvene (blizu) do ljubičaste (daleko).
Mreža ispune osnova je za algoritme planiranja kretanja koje koristi ANAFI Ai za autonomni let i izbjegavanje prepreka.
Izbjegavanje prepreka
Zahvaljujući poznavanju 3D okruženja bespilotne letjelice pohranjene u rešetki za ispunu, ANAFI Ai može izbjeći prepreke. To pruža značajnu dodatnu sigurnost za autonomne misije, ali je također korisno za ručni let, osobito ako je vidna linija između pilota i bespilotne letjelice narušena.
Svakih 30 ms ANAFI Ai predviđa koji će nominalni kratki vremenski horizont biti u budućnosti. Ovo predviđanje se zaključuje iz veza koje je poslao korisnik, bilo da se radi o naredbama leta s daljinskog upravljača, međutočkama koje se trebaju pridružiti planu leta ili ulaznoj putanji. Zatim, koristeći simulirani unutarnji model bespilotne letjelice, algoritam za reprogramiranje izračunava najmanje moguće korekcije ove predviđene nominalne putanje koje je čine bez sudara i izvedivom za bespilotnu letjelicu.
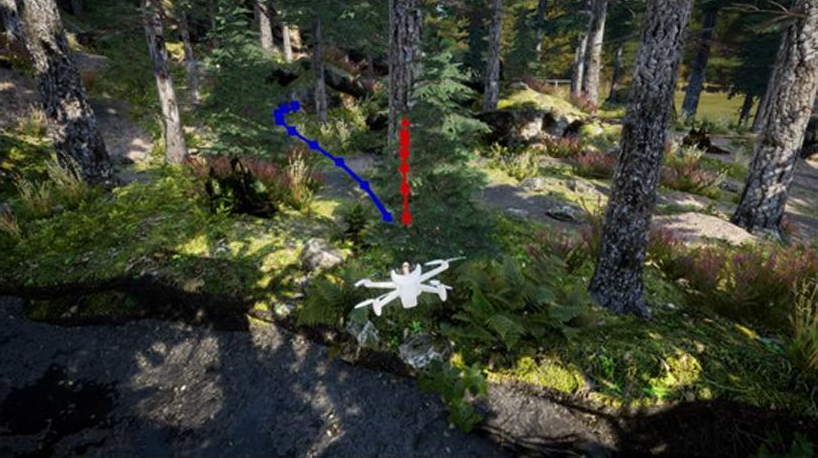 Primjer ispravljene putanje izračunate algoritmom za izbjegavanje prepreka kao odgovor na sudar referentne putanje s drvetom.
Primjer ispravljene putanje izračunate algoritmom za izbjegavanje prepreka kao odgovor na sudar referentne putanje s drvetom.
Sustav za izbjegavanje prepreka ANAFI Ai dizajniran je za rad pri brzinama do:
- Ravni u visini: 29 km / h
- Uspon: 14 km / h
- Pad: 11 km / h
Izbjegavanje je ograničeno na kiši ili jakom vjetru, slabom svjetlu ili poremećenoj satelitskoj navigaciji. Osim toga, prije leta morate provjeriti jesu li leće osjetnog sustava čiste.
Letne misije

Ključne značajke
Zrak SDK (vidi. Odjeljak SDK) omogućuje programerima pristup svakom senzoru drona, kameri, sučelju za povezivanje i samostalnoj funkciji. Stoga mogu prilagoditi ponašanje drona za stvaranje misija leta. Svaka letna misija sadrži skup osnovnih ponašanja ili načina rada:
- Na zemlji: Ponašanje pri zaustavljenim motorima, npr. Kalibracija senzora.
- Polijetanje: razne strategije polijetanja
- Lebdenje: držite fiksnu točku
- Let: ručno funkcije i autonomni let
- Slijetanje: razne strategije slijetanja
- Kritično: nakon otkrivanja kritičnog stanja
Prilagođene misije leta mogu stvoriti novo ponašanje ili ih ponovno koristiti iz zadane misije.
Cijena i dostupnost
Početak prodaje drona ANAFI Ai zakazan je za rujan 2021. godine. Podaci o cijeni zasad nisu objavljeni. Nastavljamo pratiti dolazne informacije i svakako ćemo kasnije ažurirati ovaj odjeljak.

Dokumentacija za preuzimanje
Dokumentacija za upoznavanje s proizvodom od razvojnog programera:
- Preuzmite cjelovitu tehničku dokumentaciju od razvojnog programera
- Preuzmite specifikaciju proizvoda od razvojnog programera
Videozapisi
Najbolje recenzije ANAFI Ai od programera i korisnika
Raspakivanje i prvi let.
Testni let bespilotne letjelice na dometu s 4G vezom. Ukupno vrijeme leta bilo je 29 minuta pri prosječnoj horizontalnoj brzini leta od 58 km / h (16 m / s). Za to je vrijeme bespilotna letjelica uspjela prevaliti 27 km. Također možete primijetiti da je let izveden u uvjetima jakog vjetra, na što je sustav dronova stalno upozoravao.
.






