
- 1 מבוא
- 2 המפתח אודות המכונה
- 3 תכונות
- 4 חבילה תוכן
- 5 מפרט
- 5.1 מזל"ט
- 5.2 תקשורת
- 5.3 מערכת ניווט
- 5.4 Skycontroller 4
- 5.5 סוללה חכמה למטוסים
- ) 5.6 אפליקציה
- 5.7 מצלמה
- 5.8 מצבי טיסה אוטונומיים
- 5.9 אבטחת סייבר
- 5.10 תוכים SDK
- 6 מראה
- 7 תקשורת
- 7.1 4G
- 7.2 מקסימום. טווח עם חיבור 4G
- 7.3 Wi-Fi
- 7.4 וידאו חי
- 8 מצלמה
- 8.1 מטריצה 48MP
- 8.2 עדשה
- 8.3 מצבי וידאו
- 8.4 קידוד וידאו
- 8.5 HDR
- 8.6 מצבי צילום
- 9 ייצוב היברידי
- 9.1 גימבל מצלמה ראשית
- 10 פוטוגרמטריה
- 10.1 בדיקה וקרטוגרפיה
- 10.2 יכולות AI ו- 4G
- 10.3 טיסה אוטונומית
- 11 פוטוגרמטריה או לידר
- 11.1 יתרונות פוטוגרמטריה
- 11.2 חסרונות LIDAR
- 12 SDK
- 12.1 Air SDK
- 12.2 SDK הקרקע
- 12.3 OpenFlight
- 12.4 ספינקס
- 12.5 אולימפה
- 12.6 PdrAW
- 12.7 דגמים C. A. D.
- 12.8 תאימות MAVLink ו- GUTMA
- 13 המערכת האקולוגית השותפה הגדולה ביותר עבור מזל"ט תוכים
- 13.1 תוכי לכל צרכי עסקים
- 14 אבטחת רשת
- 14.1 פרטיות הנתונים
- 14.2 FIPS140 תואם -2 ומוסמך על ידי CC EAL5 Secure Element
- 14.3 חיבור מאובטח 4G ואימות חזק
- 14.4 אתחול ושדרוג מאובטח
- 14.5 הגדרת מפתחות משתמש ברכיב המאובטח
- 14.6 תמונות בחתימה דיגיטלית
- 14.7 שקיפות ובדיקת אבטחה רציפה עם שפע באגים
- 15 ניהול נתונים
- 15.1 נתונים שנאספו
- 15.2 שימוש סופי בנתונים שנאספו [1 26]
- 15.3 שיפור הבינה המלאכותית (AI)
- 16 מאפייני טיסה
- 16.1 מאפיינים אווירודינמיים
- 16.2 מפעילים ואווירודינמיקה
- 16.3 חיישנים
- 16.4 מאפייני חיישן
- 16.5 טייס אוטומטי
- 17 טיסה אוטונומית
- 17.1 תכונות עיקריות
- 17.2 אסטרטגיית מערכת התפיסה
- 17.3 חיישנים
- 17.4 השעיה כפולה
- 17.5 שחזור הסביבה
- 18 משימות טיסה
- 18.1 תכונות עיקריות
- 19 מחיר וזמינות
- 20 הורדת תיעוד
- 21 סרטונים
מבוא [16 4]
תוכו אנאפי איי הוא פתרון ייחודי חדש לגמרי מ מפתח צרפתי ידועלשימוש מסחרי
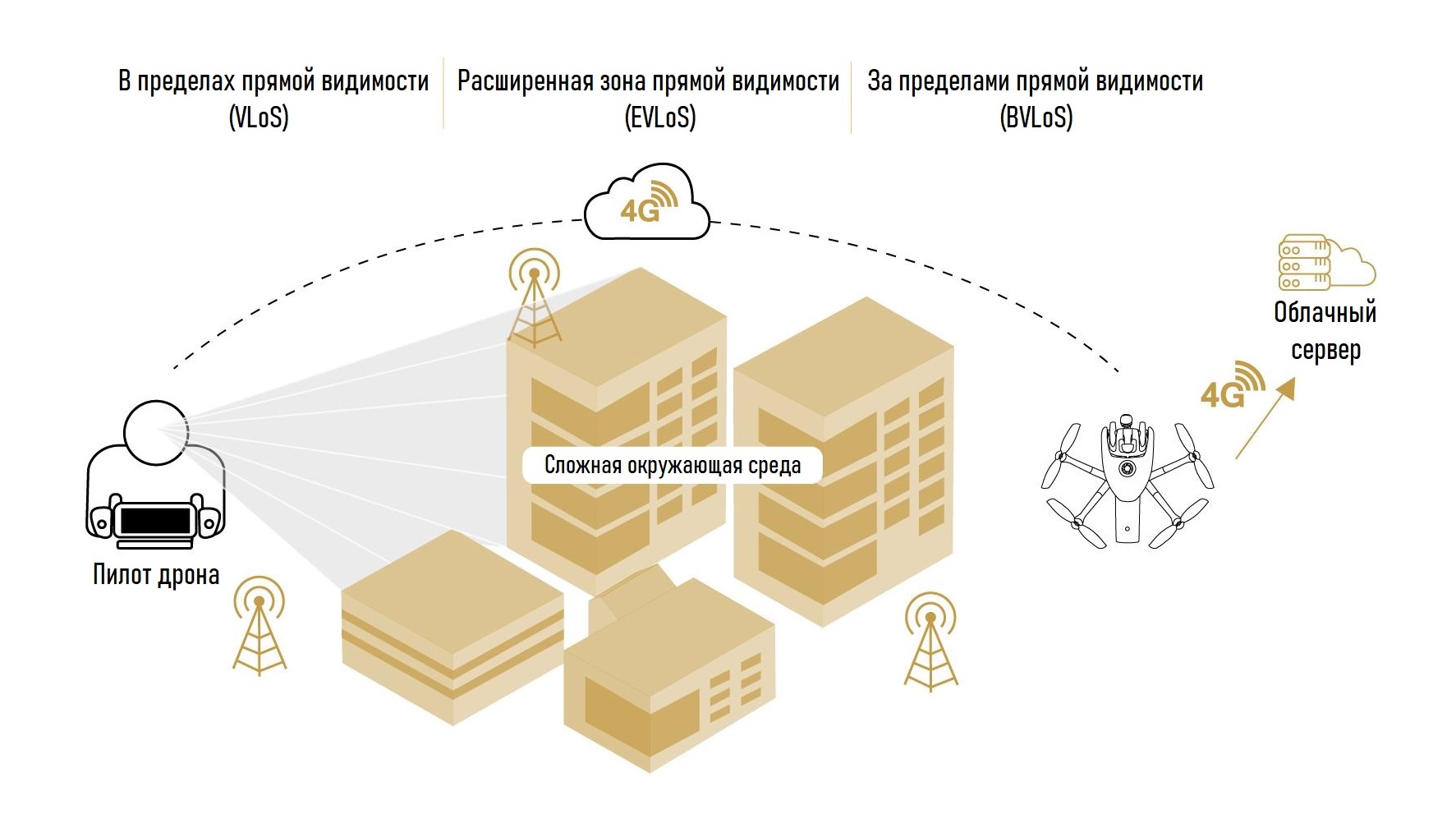
כרטיס הביקור של אנאפי איי הוא מודול ה- 4G המובנה, שבזכותו המזל"ט הצליח להשתמש בדור הרביעי של תקשורת סלולרית כערוץ העברת הנתונים העיקרי בין המזל"ט לציוד הבקרה, שלמעשה מסיר את כל ההגבלות על טווח הטיסה וקובע מראש את פעולתו של מל"ט מחוץ לטווח הראייה.במבט קדימה, נציין כי הפוטנציאל המוצהר של המכונית התברר כחזק להפליא ומתאים יותר מאי פעם למראה העתידני שלה, שעוצב בהשראת הטבע ליצירת מהנדסים צרפתים.
המפתח אודות המכונית
מרטין לינה, מנהל השיווק ב- Parrot, מזל"ט תוכים

תכונות
תכונות עיקריות של התוכי אנאפי איי:
- משקל 898 גרם
- זמן טיסה 60 שניות
- עיצוב מתקפל ונייד ייחודי
- מודול תקשורת 4G מובנה לאינטראקציה מלאה של מכשירי מזל"ט / בקרה ללא הגבלות בכל תנאי סביבה
- ) תואם ל- LTE ברחבי העולם
- מצויד במערכת שידור אותות חד כיוונית (4 אנטנות כיווניות עם רפלקטור (רווח: 2.5 dBi / s אנטנות). המזל"ט קובע את זוג האנטנות הטובות ביותר בהתאם למיקומו ומיקומה ביחס ל עמדת טייס)
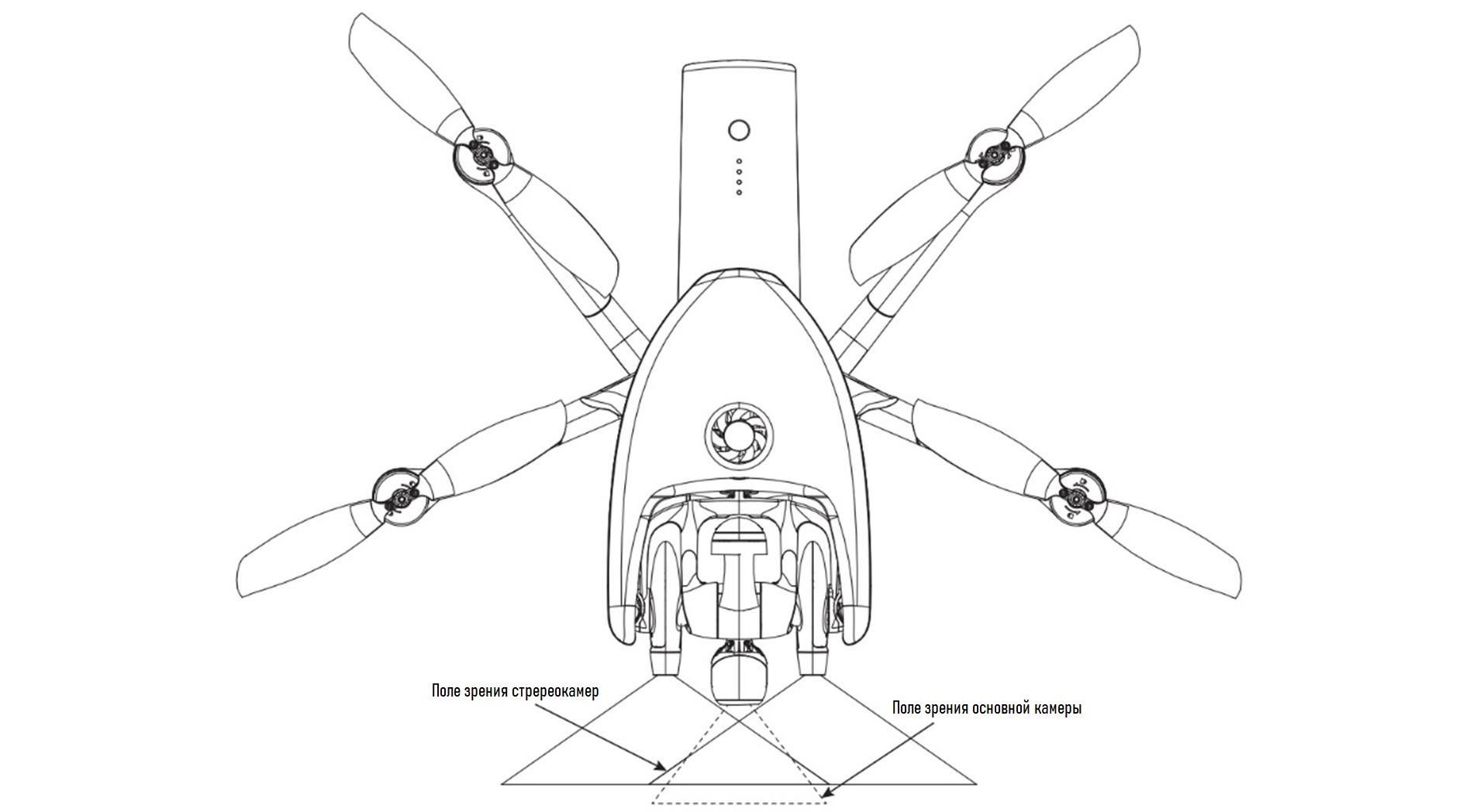
- מצויד במערכת הדמיה חד כיוונית ייחודית של העולם הסובב הבנויה על זוג מצלמות סטריאוסקופיות המותקנות על גימבל מיוחד עם טווח של 330 מעלות (-120 ° עד 210 °), העובדות ב במקביל למערכת אופטימיזציה חכמה. מסלולי טיסה
- מותאם לטיסה פנימית
- הזרמת וידאו בשידור חי ב 1080p עם זמן אחזור נמוך (300 מ ' / ש') ללא הגבלת טווח בשום מקום בעולם, עם קצב סיביות וידאו 12 Mbps
- יכולת העברת קבצים לאחסון ענן ישירות בטיסה
- מודול תקשורת Wi-Fi מובנה (Wi-Fi 802.11a / b / g / n) לבקרת אינטראקציות מלאה עם מזל"ט / ציוד (כחלופה אפשרות חיבור)
- שפחה. טווח תדרי Wi-Fi: 2.4GHz / 5.8GHz
- מקסימום. טווח טיסות FPV באמצעות Wi-Fi: 9 ק"מ
- אופן פעולה אוטומטי ייחודי של מודולי 4G / Wi-Fi, המאפשר, על בסיס עומס רשת, לעבור בצורה חלקה מטכנולוגיית תקשורת אחת לאחרת ללא אובדן נתונים.
- מזל"ט מסוג IPX3
- מקס. זמן טיסה 32 דקות
- מקסימום. מהירות טיסה אופקית 61 קמ"ש
- מקס. עמידות לרוח: 13 m / s
- מקסימום.תקרה מעל פני הים 5000 מ '
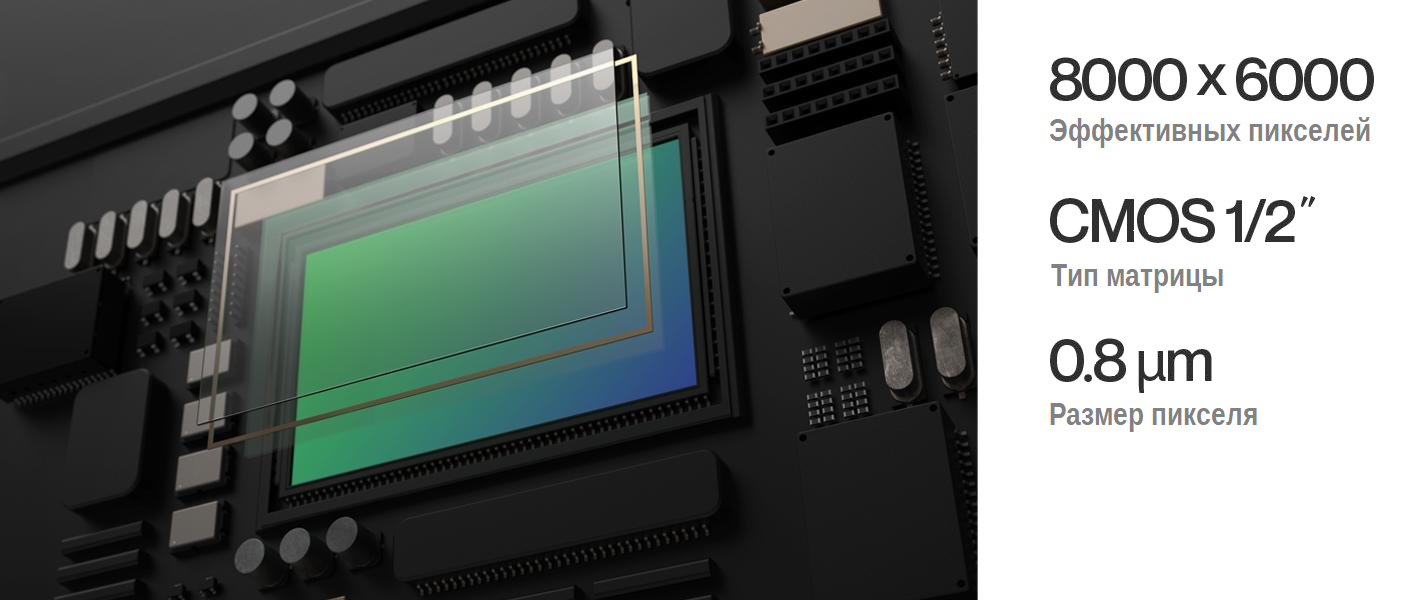
- מצלמת 4K 48MP בנויה על מטריצת CMOS בגודל 1/2 אינץ' בגודל פיקסל של 0.8 מיקרון; עם מערך מסנני צבע מובנה של באייר
- עדשת LD-ASPH אופטית
- מערכת ייצוב תמונה היברידית בת 6 צירים (מכשיר 3-ציר מכני 3-ציר דיגיטלי EIS)
- ניתנת לשליטה טווח הפעלה gimbal -90 ° עד 90 °
- 6x זום דיגיטלי ללא אובדן (2x במצב 4K / 4x במצב FHD)
- מקס. קצב סיביות וידאו 200 Mbps
- פורמטי הקלטת וידאו HDR8 / HDR10
- מקסימום. טווח דינמי 14EV
- פרופיל צבע P-log לעיבוד לאחר
- 5 × מצבי טיסה וירי אוטומטיים (פוטוגרמטריה / תכנית טיסה / צלמת / RTH חכם / רכב)
- חריצים מובנים לכרטיסי MicroSD ו- SIM
- תואם ל- PIX4D Suite
- מצבי טיסה פוטוגרמטריים זמינים באספסוף. אפליקציית FreeFlight 7 ותוכנת OpenFlight
- יצירת תכנית טיסה בלחיצה אחת
- פוטוגרמטריה של 48 מגה פיקסל בשנייה: מהר פי שניים מהמתחרים
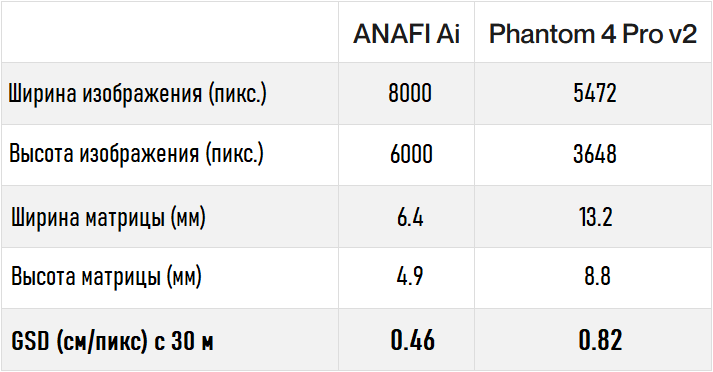
- דיוק צילום: 0.46 ס"מ / פיקסלים. GSD בגובה 30 מטר
- תמיכה ב- SDK תוכים (עם אפשרות להטמיע את הקוד שלך במזל"ט באמצעות ה- Air SDK, ליצור יישומים ניידים באמצעות ה- SDK Ground, להגדיר תחנת קרקע פתוחה באמצעות OpenFlight, אינטראקציה עם הספינקס המודרני. כלי סימולציית מזל"ט וכן סקריפט Python עם Olympe ועיבוד וידאו ומטא -נתונים עם PdrAW)
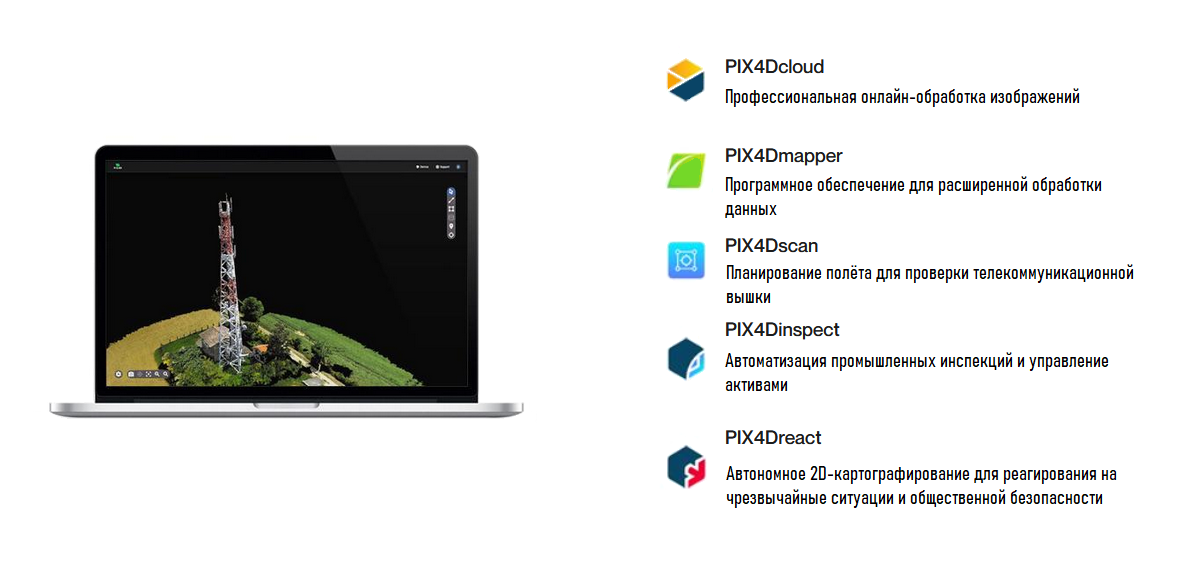
- תואם לתוכנת צד שלישי: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- תואם ANAFI Ai תקנות תקנת הגנת הנתונים של האיחוד האירופי (GDPR)
- פרטיות נתונים מעולה עם NIST FIPS140-2 מובנה ברמה 3 WISeKey Secure Element עם אישור EAL5 קריטריונים נפוצים
- וידאו ובקרות מוגנים באמצעות SRTP / DTLS על פי webRTC
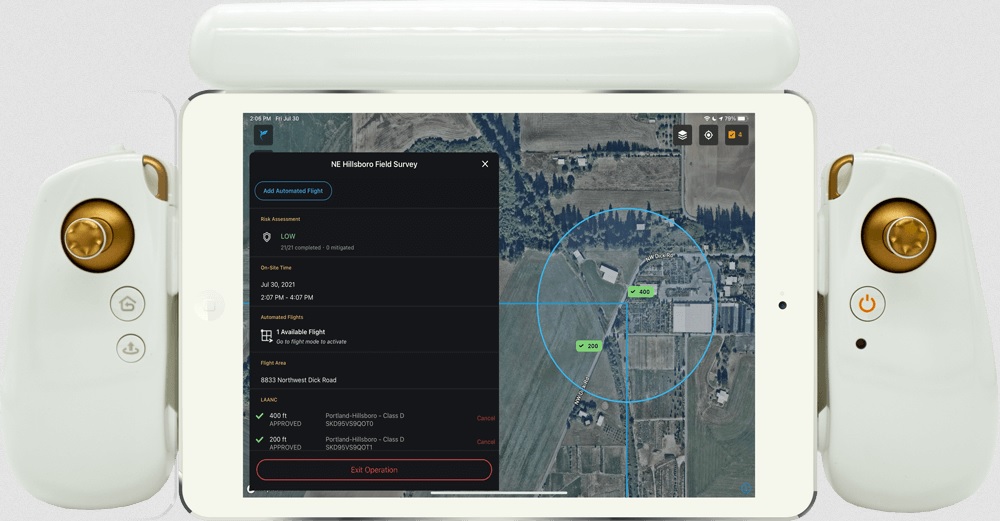
- ציוד בקרה נייד חדש לתוכי סקייקו ntroller 4
- אפליקציה חדשה לנייד Parrot FreeFlight 7

חבילה
היזם מציע את המזל"ט בתצורה אחת, שתכלול:
- מזל"ט ANAFI Ai
- מארז שינוע קשיח
- ציוד בקרה תוכי סקייסקונטר 4
- 1 × סמארט סוללה
- מטען USB-PD
- ערכת מדחף חלופית (2CW / 2CCW)
- כבל נלווה (USB-C לברק)
- 2 × כבלים נלווים (USB -C ל- USB -C)
- תרשים כיול

מפרט
כלי טיס

תקשורת
מערכת ניווט
Skycontroller 4

סוללה חכמה למטוסים
אפליקציה

)מצלמה

) מצבי טיסה אוטונומיים
אבטחת סייבר
תוכים SDK
הבא, אתה תוכל להכיר את המידע המרכזי של התוכי אנאפי איי, שיאפשר לך ללמוד עוד על הפוטנציאל המוצהר של המכונה, וכן אילו שיפורים בוצעו בהשוואה לגרסה המסחרית של המזל"ט תוכים אנפי תרמי ומזל"טים נוספים של מותגים מובילים.
מראה





תקשורת
4G
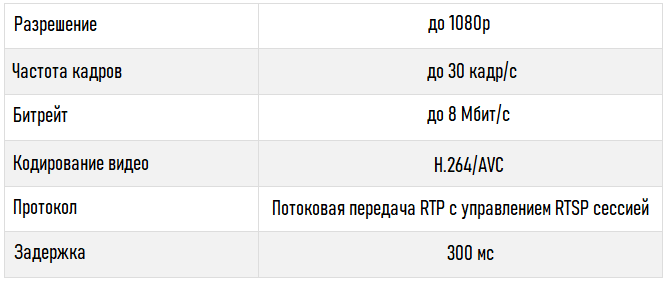
ANAFI Ai כולל מודול רדיו 4G (בנוסף ל- מודול הרדיו Wi-Fi), המאפשר לך לשדר זרם וידאו באיכות 1080p עם קצב סיביות מרבי של 12 Mbps, עם השהיה נמוכה מאוד (300 ms), ללא הגבלה בטווח ובכל מקום בעולם.
תאימות
מודול ANAFI Ai 4G תומך ביותר מ -28 להקות תדרים, המכסות יותר מ 98% מהתדרים הפרוסים ברחבי העולם.
מתג רשת אוטומטי
איכות ורוחב הפס של רשתות 4G ו- Wi-Fi נמדדות כל 100 ms כדי להתאים את הסטרימינג לתנאי הרשת. בשילוב עם אלגוריתמי ניתוב, החיבור בין המזל"ט לבקר שלו נשמר גם כאשר Wi-Fi מופרע קשות. לפיכך, כאשר רוחב הפס האפקטיבי (רוחב הפס השמיש) של ה- Wi-Fi נמוך מ -1.5 Mbps, המערכת תעבור אוטומטית ל- 4G.
)מקסימום. טווח עם חיבור 4G
הסרטון מהמפתח מציג את המקסימום. טווח טיסה של Anafi Ai עם חיבור 4G בכיוון אחד בטעינת סוללה אחת. זמן הטיסה הכולל היה 29 דקות במהירות טיסה אופקית ממוצעת של 58 קמ"ש (16 מ ' / ש'). במהלך תקופה זו, הרחפן הצליח לעבור לאורך 27 ק"מ. כמו כן, תוכלו להבחין כי הטיסה בוצעה בתנאי רוח חזקה, שהוזהרה כל הזמן על ידי מערכת המל"טים.
אלגוריתמים לאופטימיזציה של זרמי וידאו מיושמים
בקרת גודש של 4G
אלגוריתם בקרת גודש מאפשר:
- למדוד אובדן מנות לאורך כל מחזור הרשת.
- מדידת עיכוב (זמן הלוך ושוב).
- התאם את רוחב הפס בהתאם לשני הפרמטרים הללו.
המטרה הסופית של האלגוריתם היא למקסם את רוחב הפס הזמין תוך שמירה על זמן ההשהיה הנמוך ביותר האפשרי. אלגוריתם זה מיושם על כל אחד מהממשקים הזמינים במזל"ט, כל אחד עם הפרמטרים שלו, המותאם בהתאם לרשת. בהתבסס על המידע שמספק אלגוריתם זה, מנהל הקישורים מקבל החלטות ניתוב והחלטות ממשק אקטיביות.
שליטה במזל"ט באמצעות חיבור 4G
ANAFI Ai מתחבר לשלט הרחוק באמצעות 4G תוך פחות מ -30 שניות אם המזל"ט נמצא מחוץ לטווח ה- Wi-Fi, ותוך פחות מ -15 שניות אם המזל"ט נמצא בטווח ה- Wi-Fi. וגם חיבור 4G מספק:
- זיהוי והתחלת חיבור המבוסס על פרוטוקול VOIP SIP.
- השתמש בשרת ממסר כדי ליצור חיבורים ברשתות מאובטחות.
ביצועי זרם וידאו
- חביון: 300 אלפיות השנייה.
- אבטחה: וידאו ובקרות מוגנים באמצעות SRTP / DTLS על פי webRTC.
- אנטנות: 28 להקות LTE מ- 700 מגה -הרץ עד 2.6 גיגה -הרץ.

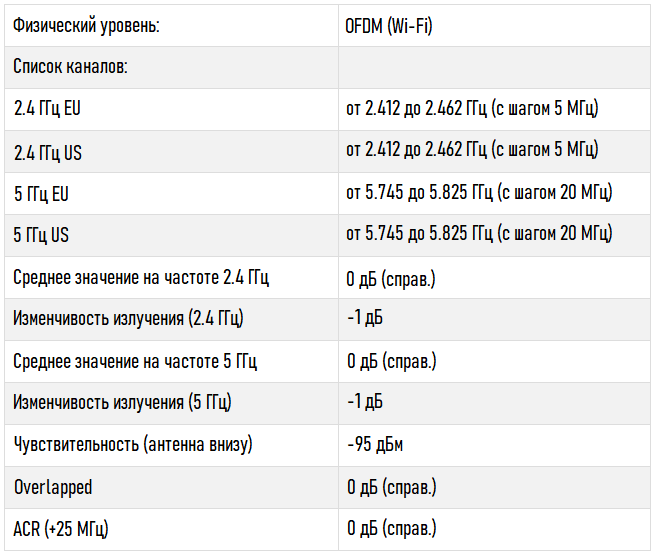
Wi-Fi
מערכת הילוכים דו כיוונית
- ANAFI Ai יש 4 אנטנות מחזירי כיוון (עם הגברת אנטנה: 2.5 dBi / s). המזל"ט קובע את זוג האנטנות הטובות ביותר על סמך כיוונו ומיקומו ביחס למיקום הטייס.
- עם רווח מחודש של 3.5 / - 1.5 dBi במישור האופקי של המזל"ט, רווח ה- ANAFI RF Ai אחיד ביותר.
- קרינת האנטנה במורד הזרם שופרה ב- 4 dB לעומת ANAFI.
עיצוב חיצוני של הרדיו בעל הספק גבוה
חזית הרדיו ממקסמת את הכוח בבסיס האנטנה עם ליניאריות טובה מאוד רגישות (-94 dBm ב -6.5 Mbps) להשגת העוצמה המגבילה של FCC.

אמינות Wi-Fi
פרמטרים 802.11
רוחב פס נמוך, חביון נמוך, שונות ברמת הקליטה בשל מהירות מזל"ט, טווח ארוך, נוכחות של הפרעות. פרמטרים אלה כוללים צבירה, ניסיונות חוזרים, טכנולוגיית MiMo (STBC), קצב נתוני מסגרת בקרה ותנאי ניתוק.
מניעת הפרעות חכמה
ל- ANAFI Ai יש אלגוריתם למחיקת ערוצים (2.4 GHz ו- 5 GHz להקה כפולה) במקרה של הפרעה.
התאמה וניטור זרימה
ANAFI Ai עוקב באופן רציף אחר מצב הקישור של 4 הרץ שלה ויכול לזהות הפרעות. זה מאפשר לך לייעל באופן דינמי את רוחב הפס ואת גודל המנות המועברות. הוא גם מתריע על הטייס אם הוא נמצא בסביבה חסימה במיוחד או עומד לאבד אות.
הפחתת רוחב פס
בגבול הטווח שלה ואם התנאים מאפשרים זאת, ANAFI Ai יכול לעבור לרוחב פס של 10 מגה -הרץ כדי לשפר את הרגישות שלו ב -3 dB ולהגדיל את הטווח ב -40%.

מחווני רדיו
שידור וידאו
מחווני קישור וידאו
אלגוריתמים לאופטימיזציה של זרמי וידאו מיושמים
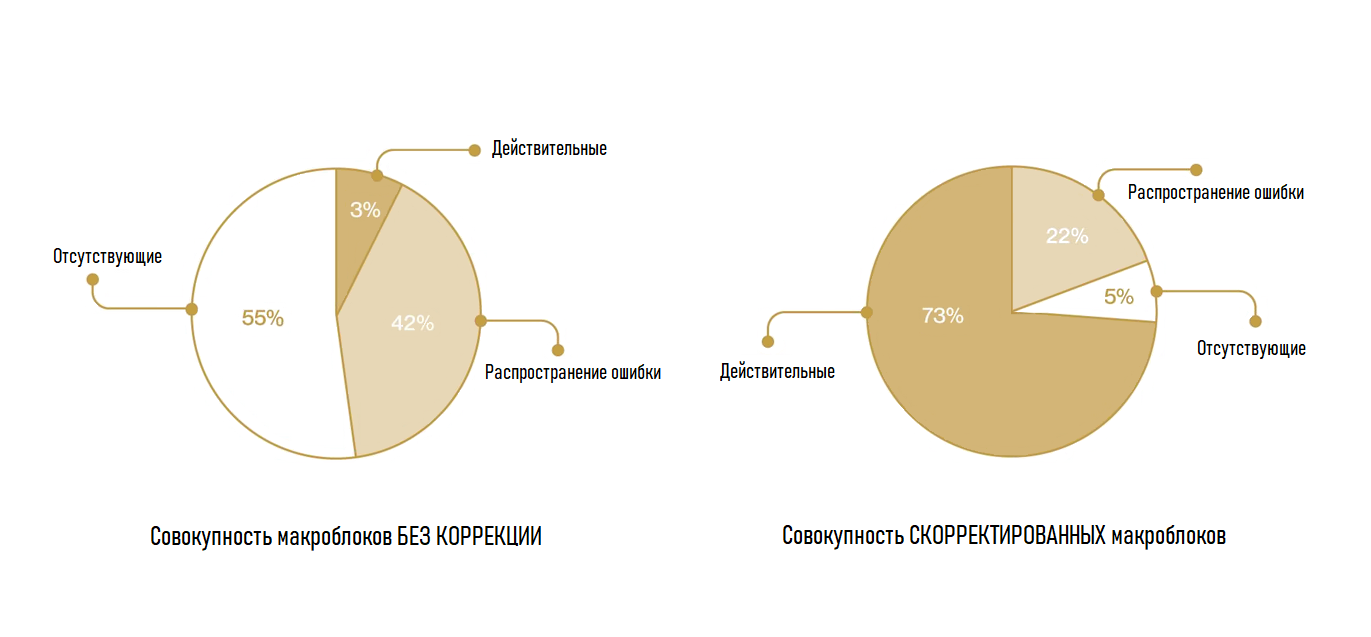
הזרמת Parrot Gen4 (דור רביעי)
אלגוריתם זה מפחית את ההשפעה החזותית של אובדן רשת ומספק יכולת פעולה הדדית. כל המפענחים, תוך מתן זרם מלא בתחביר: החלקים החסרים בתמונה משוחזרים כחלקים חסרים, זהים לאלה שבתמונת הייחוס.
לפיכך, תקלות נמצאות באזורים המועדים לאובדן ואינם חלים על התמונה כולה.
הגרפים שלהלן מציגים את אחוזי ההצלחה בפענוח מאקרו -חסימה באובדן 5% ברשת - עם ובלי תכונות הזרמה מתקדמות של ANAFI Ai. האלגוריתם מבטיח פענוח נכון של 75% ממאקרו -חסימות. הם מאפשרים למשתמש להמשיך במשימתו מבלי להקפיא את המסך או לאבד סטרימינג.
בקרת גודש
האלגוריתם גם מעריך את סביבת ה- Wi-Fi והרדיו כדי לצפות ולמנוע אובדן מנות ועומסי רשת, מה שעוזר להפחית חביון.האלגוריתם מבוסס על אומדן של קיבולת הערוץ, המחושב על בסיס קצב הנתונים ושיעור השגיאות בשכבה הפיזית; אז זה משפיע על פרמטרי הקידוד והקיבול של הרשת.
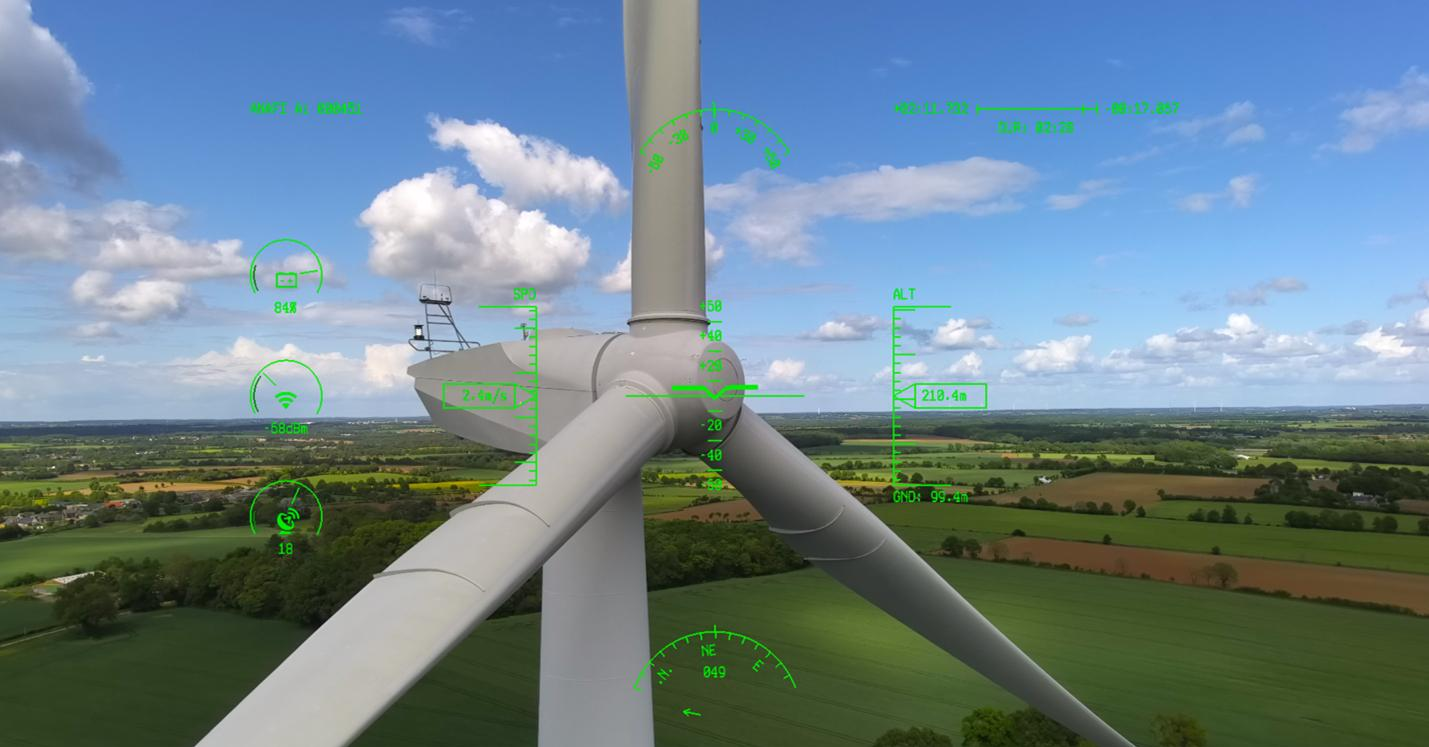
מטא נתונים
מטא נתונים מועברים עם זרם הווידאו. בפרט, הם מכילים רכיבי טלמטריה של מזל"ט (מיקום, גובה, מהירות, רמת סוללה וכו ') ומדדי וידיאו (זווית מצלמה, ערך חשיפה, שדה ראייה וכו').
סנכרון תמונות ומטא נתונים פתוחים מבצע את הפונקציות של מיקום מדויק על המפה, מעקב אחר מכשירי טיסה ב- HUD, או הפעלת רכיבי מציאות מוגברת.
מטא נתונים כלולים בשיטות סטנדרטיות (סיומת כותרת RTP); פורמט הנתונים שהוגדר על ידי Parrot הוא קוד פתוח: הוא זמין ב- ANAFI Ai SDK.
מצלמה

חיישן 48MP
מטריצת ANAFI Ai כוללת מספר רב של מגה פיקסל לצילום אוויר מפורט.
היא משתמשת בטכנולוגיית מערך מסנני הצבעים של Quad Bayer, כאשר לקבוצות של 4 פיקסלים סמוכים יש אותו צבע. לפיכך, ניתן להשיג צילום HDR בזמן אמת הן במצבי צילום ווידיאו על ידי הוספת אותות מארבעה פיקסלים סמוכים.
הטווח הדינאמי שלו פי 4 מזה של מטריצות באייר סטנדרטיות. אפילו סצינות מורכבות ניתנות לצילום עם הדגשה מינימלית או אובדן פרטי צל.
עדשה
עדשת ANAFI Ai פותחה במיוחד עבור תוכים. הוא משלב 6 אלמנטים אספיריים והוא מותאם להפחתת התלקחות אופטית. עדשה זו נותנת 68 ° HFoV במצב וידאו סטנדרטי ו- 64.6 ° HFoV במצב צילום סטנדרטי.

מצבי וידאו
ANAFI Ai מצלם וידאו חלק 4K ב -60 פריימים לשנייה, כולל P-Log, וגם HDR10 4K וידאו במהירות של עד 30fps. הטבלה שלהלן מפרטת את כל מצבי הווידאו ANAFI Ai.

קידוד וידאו
משתמשים יכולים לבחור בין H.264 (AVC) ו- H.265 (HEVC).
כל הרזולוציות משתמשות בפורמטים של הפיקסלים הבאים:
- YUV420p (8 צבעים בנפרד BT.709 צבע) למצב סטנדרטי ו- HDR8.
- YUVJ420p (8 סיביות / רכיב, טווח מלא - מרחב צבע BT.709) לסגנון P -log.
- YUV420p10 (10bpc שטח BT2020 צבע) להקלטת HDR10, H.265 בלבד.
HDR
בעת הקלטת וידאו ב- HDR8 ו- HDR10, ANAFI Ai מכסה טווח דינמי של 14 EV. פורמט HDR10 מציע בהירות מרבית של 1000 nits ועומק צבע של 10 סיביות. הוא מספק מיליארד סולם צבעים לעומת 16 מיליון עבור טווח דינמי סטנדרטי. בהשוואה ל- HDR8, HDR10 מפיק תמונות בהירות יותר מפי שניים עם עליה ניגודית מקבילה.ניתן להציג HDR8 בכל מסך רגיל, בעוד HDR10 מיועד לטלוויזיות ולמסכי HDR10.
מצבי צילום
תיאור מצבים
הקטע 'בקרת מצב' מכיל הגדרות המשפיעות על מספר הצילומים שצולמים בכל פעם שתריס משוחרר..
מצב צילום יחיד
מצב צילום יחיד רגיל. לאחר כל שחרור תריס, התמונה שצולמה מעובדת באופן מיידי על ידי המערכת.
מצב תיוג
משתמשים יכולים לצלם סדרות של 3, 5 או 7 פריימים עם חשיפה שונה לכל פריים. ההגדרות המוגדרות מראש זמינות:
- [-1 EV, 0, 1 EV] (הגדרות ברירת מחדל)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

מצב פרץ
מצב פרץ יאפשר למשתמש לצלם פרץ של 10 פריימים תוך שנייה אחת.
מצב פנורמה
מצב פנורמה כולל ארבע צילומי פנורמה שונים:
- כדורי (360 °) הוא מצב פנורמי הכולל שלוש אפשרויות עבור צילום פנורמה כדורית: כדור / כוכב קטן / מנהרה.
- אופקי (180 °)
- אנכי (109 °)
- בכל רחבי - סופר חדש מצב תפירה רחב של 9 תמונות (HFOV 110 °, פנורמה ישרה)
לפרטים על מפרט מצב פנורמה, עיין בטבלה שלהלן:

מצב Timelapse
מצב זה מאפשר לך לצלם תמונות במרווחי הזמן הקבועים הבאים:
- 48MP: 1, 2, 4, 10, 30 או 60 שניות.
- 12MP: 0.5, 1, 2, 4, 10, 30 או 60 שניות.
מצב Lapse GPS
מצב צילום זה פותח לבדיקה ופוטוגרמטריה. הוא מאפשר לצלם במרווחי המרחק הקבועים הבאים: 5, 10, 20, 50, 100 או 200 מטר.
הטבלה שלהלן מציגה את מצבי הרזולוציות והרזולוציות של תמונת סטילס, כולל מצב קריאת חיישן:
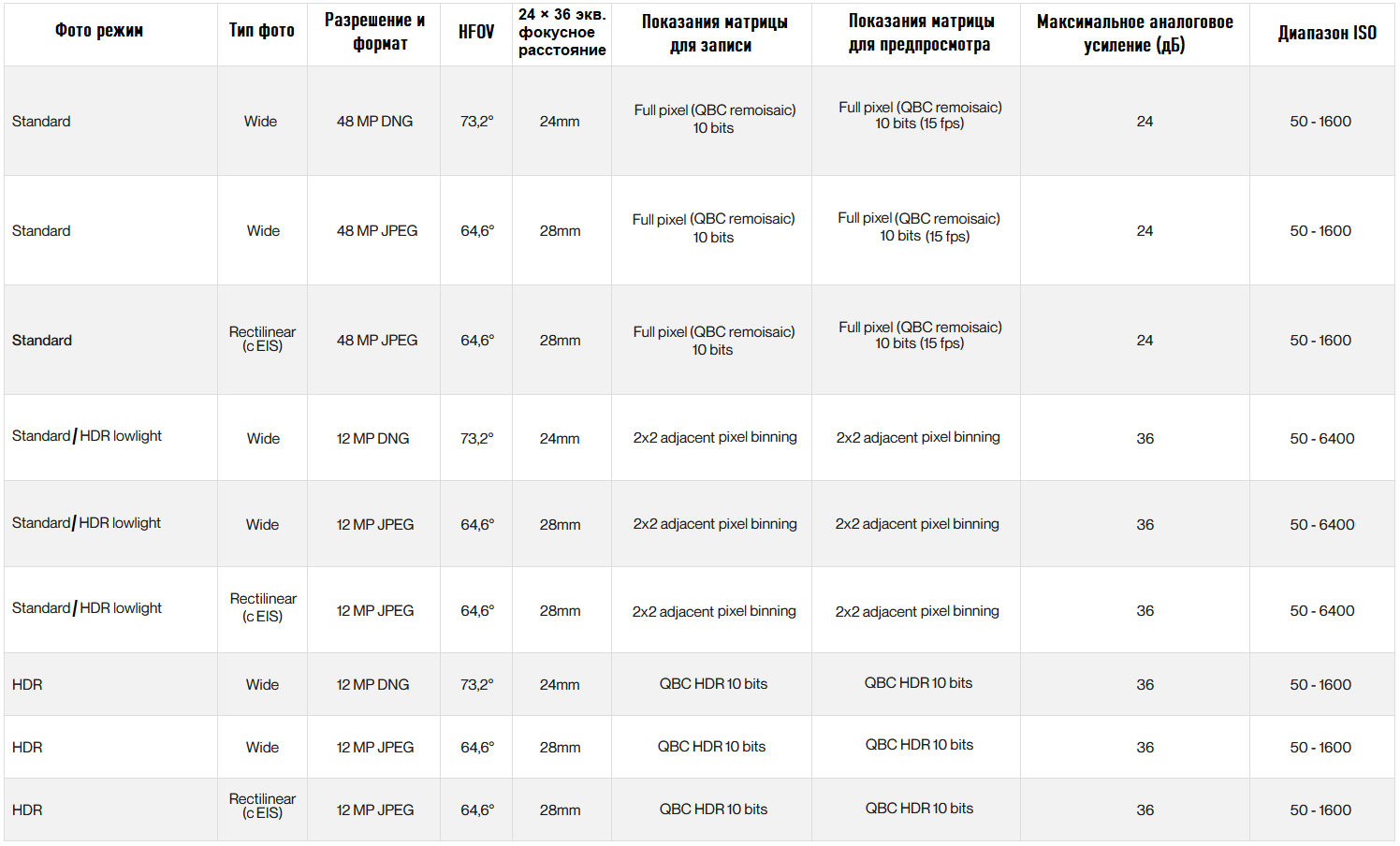
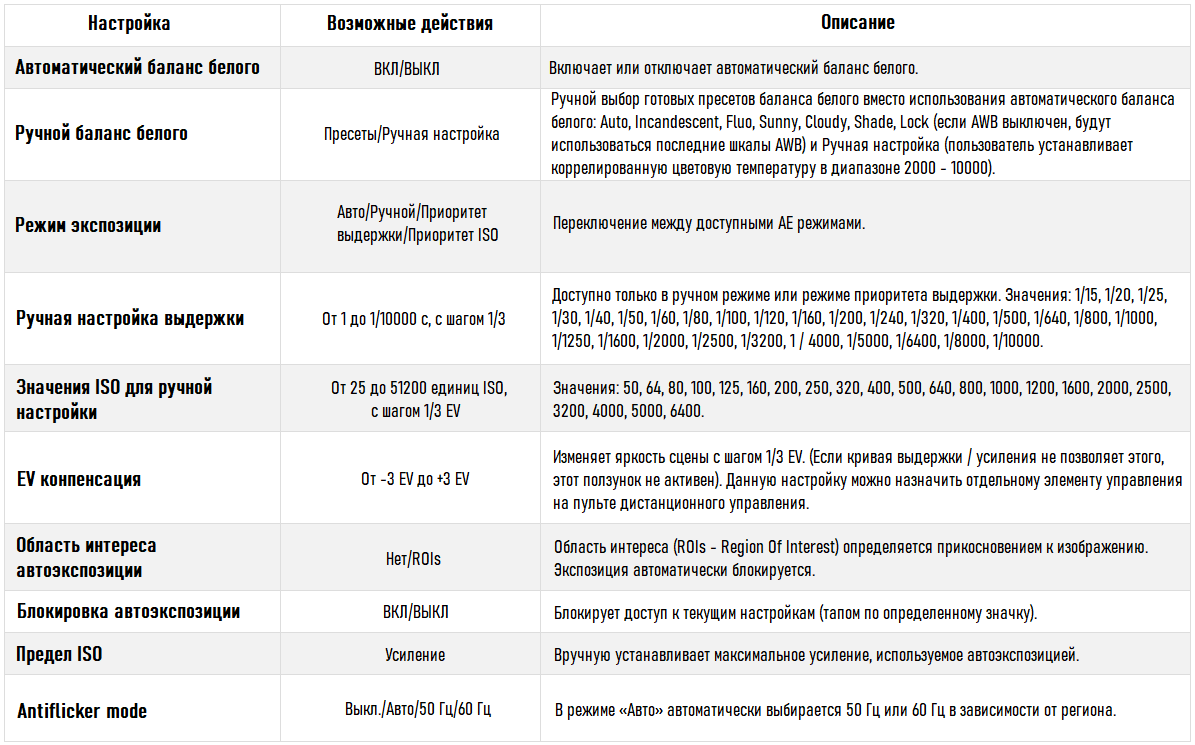
הגדרות
ב הטבלה מפרטת את ההגדרות הזמינות עבור כל מצב.
זום 6x
זום זמין בכל מצבי הצילום והווידיאו. בשילוב עם חיישן 48 מגה-פיקסל, אלגוריתמי חידוד מדויקים מייצרים תמונות בחדות גבוהה גם בעת שימוש בזום דיגיטלי 6x. משתמשי ANAFI Ai יכולים כעת לראות פירוט של 1 ס"מ ממרחק 75 מ '. ספירת הפיקסלים הגבוהה מאפשרת גם לחתוך וידאו ב- 4K ל 1080p ללא אובדן איכות.

ייצוב היברידי
ל- ANAFI Ai יש את הייצוב המדויק ביותר בשוק UAV מיקרו.
הוא משלב ייצוב משולב:
- מכני 3 צירים (מכני 3 צירים.גימבל)
- אלקטרוני 3-ציר (EIS)
ייצוב מכני מייצב את ציר הצבעה של המצלמה ללא קשר למיקום הטיסה של המזל"ט. ייצוב תמונה אלקטרוני מתקן אפקטים של מיקרו-רטט לתדרים מעל 100 הרץ, שהכונן המכני לא יכול להתמודד איתם.
גימבל מצלמה ראשית
ייצוב מכני מאפשר לך לייצב ולכוון את הציר האופקי של תצוגת המצלמה בכל 3 הצירים.
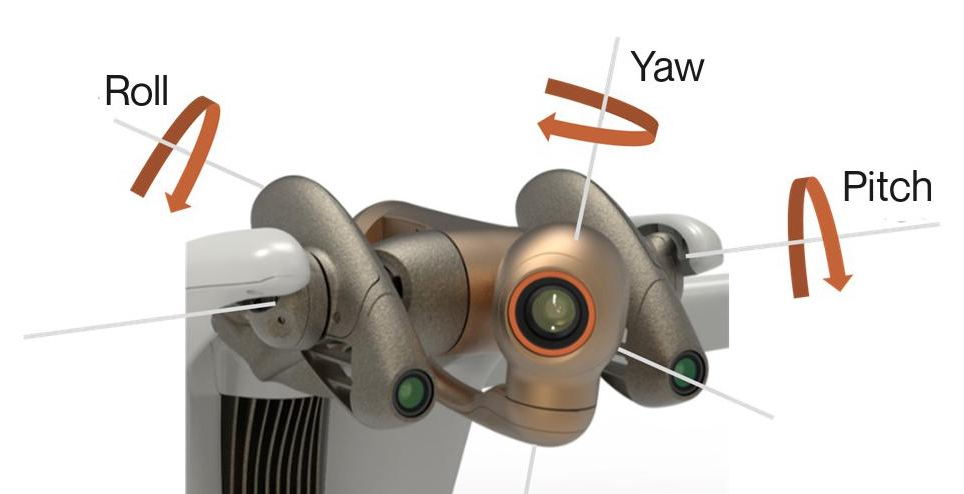 3 צירים סיבוב סיבוב. השעיה של המצלמה הראשית ANAFI Ai.
3 צירים סיבוב סיבוב. השעיה של המצלמה הראשית ANAFI Ai.
תכונות עיקריות
- 3 ציר מכני גימבל למצלמה ראשית
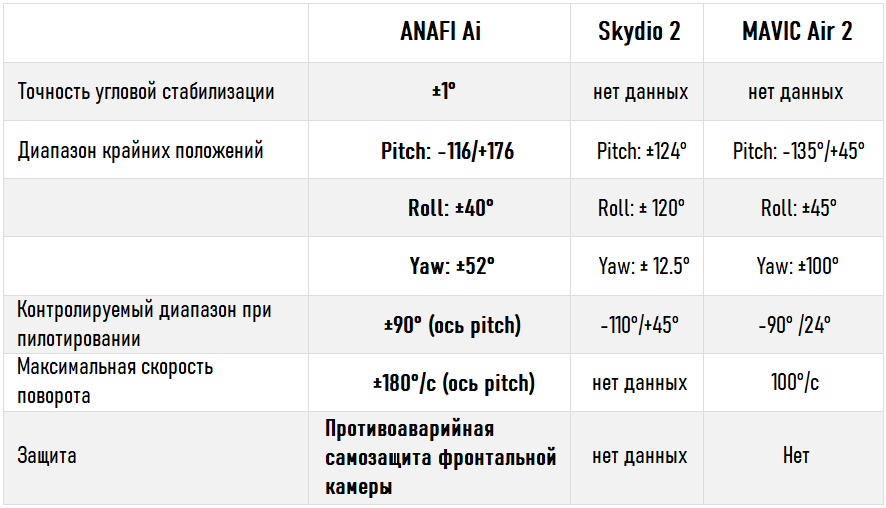
- אופסט אנכי 292 °, שדה ראייה -116 ° עד 176 °
ביצועי גימבל
- אלגוריתם ה- EIS מתקן את השפעות הנדנוד והעיוות של עדשת הזווית הרחבה וגם מבצע תמונה דיגיטלית בת 3 צירים ייצוב (Roll, Pitch ו- Yaw).
- השיטה מורכבת מיישום טרנספורמציה גיאומטרית של התמונה. טרנספורמציה גיאומטרית קשורה לחותמת זמן ולמיקום מדויק הודות ל- IMU.
- טרנספורמציה גיאומטרית מוחלת על כל תמונה על פי עיוות אופטי, רעידות ותנועות של יחידת המצלמה הנמדדת.
טווח צירים 292 °
למצלמה טווח ציר אופקי של -116 ° / 176 ° סביב ציר המגרש, ובכך מספק תצפית מעל ומתחת למזל"ט, שהוא הזדמנות ייחודית בשוק מיקרו-מל"טים בשוק.
![]()
פוטוגרמטריה
צילום אוויר עם כלי טיס בלתי מאוישים משנה את האופן בו מומחים עורכים בדיקות ומדידות. שיטות פוטוגרמטריה משמשות לעיבוד תמונות שנאספו על ידי מל"טים ליצירת מודלים דו -ממדיים ותלת -ממדיים, המאפשרים מאוחר יותר ללקוחות לתזמן תחזוקה של האובייקטים שנבדקו בזמן.
4G מספק אמינות חסרת תקדים של קישור נתוני המל"טים. משתמשים יכולים להפעיל מל"טים על שטחים גדולים, ליד מבני מתכת, מבנים, ללא חשש מאובדן תקשורת.
בדיקה ומיפוי
על ידי שילוב ה- AI של מזל"ט ANAFI Ai עם הפלטפורמה המקוונת PIX4Dinspect, המשתמשים יוכלו לבצע בדיקות מהירות ויעילות מתמיד. או. אלגוריתמים של למידת מכונה מזהים אנטנות במגדלי תאים, קובעים את גודלם, גובהם, הטייתם, אזימוט ואנכיות.
לחץ על התמונות למטה כדי לצפות בדגמי תלת מימד הדגמה שנוצרו על ידי ANAFI Ai.
דוגמה מס '1

דוגמה מס' 2
מטריצה מהשורה הראשונה
]המצלמה של מזל"ט ANAFI Ai מצוידת בחיישן CMOS בגודל 48 אינץ 'בגודל 1/2 אינץ' הבנוי בטכנולוגיית מסנני צבע Quad Bayer, המתאימה יותר מאי פעם לבדיקה ופוטוגרמטריה.המטריצה המשמשת מאפשרת לך לקבל תמונות מפורטות עם טווח דינמי רחב.
תמונות ברזולוציה גבוהה
ANAFI Ai מסוגלת לייצר תמונות סטילס של 48 מגה פיקסל, ובכך ללכוד את כל הפרטים ברזולוציה גבוהה וליצור ענן נקודתי בצפיפות גבוהה.
חדות משמעותית
משימות בדיקה דורשות יכולת לזהות פרטים זעירים כגון מספרים סידוריים, מחברים, כתמי חלודה וסדקים מתחילים.
טווח דינמי רחב
10 תחנות של טווח דינאמי במצב סטנדרטי, 14 עצירות במצב HDR. הדרגת תמונה אופטימלית חיונית ליצירת נקודות ענן עקביות ושחזורים 2D או 3D באיכות גבוהה.
55% יותר פירוט מאשר חיישנים בגודל 1 אינץ '
חיישן 48 אינץ' בגודל 1/2 אינץ 'מסוג Quad Bayer של מזל"ט ה- ANAFI Ai חד יותר מחיישני 20MP 1 אינץ' המשמשים במספר מזל"טים מקצועיים מודרניים. התמונות הבאות מבדיקת הגג של ANAFI Ai ו- DJI Phantom 4 Pro V2.0 באותו גובה מדגימות בבירור עובדה זו.

אידיאלי לבדיקות
גימבל ANAFI Ai כולל מערכת ייצוב היברידית (מכנית אלקטרונית) בת 6 צירים המפצה על תנודות טיסה ומבטיחה חדות תמונה. מצלמת ANAFI Ai בעלת טווח מתכוונן מ -90 ° עד 90 °, מה שהופך אותה למכשיר אידיאלי לאוויר לצפייה בחלק התחתון של בסיס גשר.
הטיה ניתנת לשליטה ± 90 °
דיוק
ANAFI Ai מאפשרת למשתמשים להשיג GSD של 0.46 ס"מ / פיקסלים מגובה 30 מ ', כלומר פלנימטריה של דיוק יחסי עד 0.92 ס"מ.
לשם השוואה, באותו גובה DJI Phantom 4 Pro V2 מספק GSD של 0.82 ס"מ / פיקסלים בלבד. במילים אחרות, ANAFI Ai יכול למפות את אותו מטרה, לטוס גבוה פי 1.5 מהפנטום, עם רמת פירוט שווה ערך.
יכולות AI ו- 4G
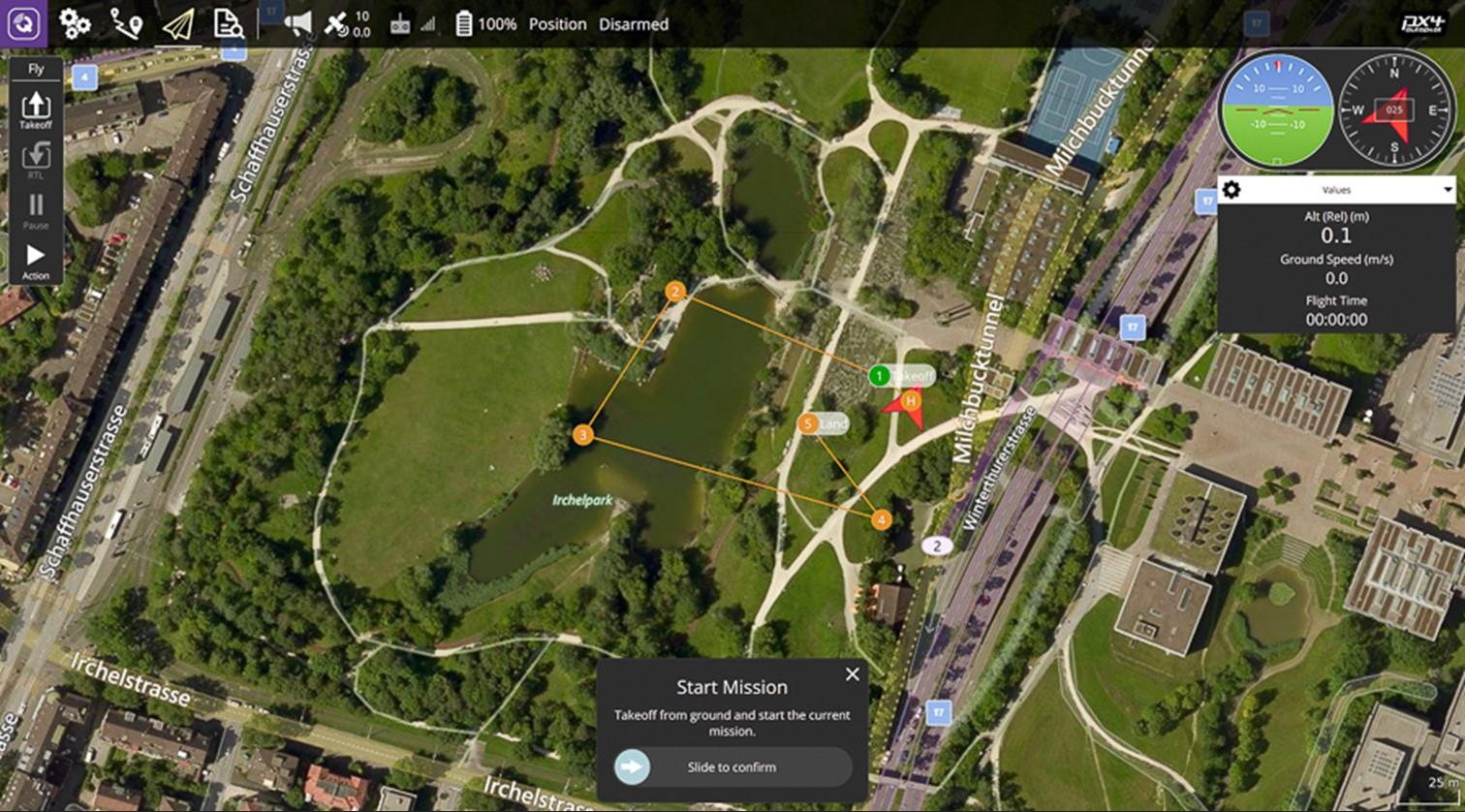
אפליקציה אחת. כל תוכנית טיסה
הפוטנציאל של אפליקציית FreeFlight 7 לנייד מאפשר למשתמש להשיק את כל משימות הסקר, הבדיקה והפוטוגרמטריה.

מצבי טיסה פוטוגרמטריים זמינים
מצבי הטיסה הפוטוגרמטריים הבאים זמינים כעת ביישום FreeFlight 7 לנייד:
- רשת] לבניית סריקה מהירה. בינה מלאכותית קובעת אוטומטית את פרמטרי הטיסה והמסלול האופטימליים. 48MP תמונות עם הפניה גיאוגרפית מדויקת של חיישני ANAFI Ai (IMU, GNSS וזמן טיסה) מאפשרות שחזור תלת מימד מדויק.
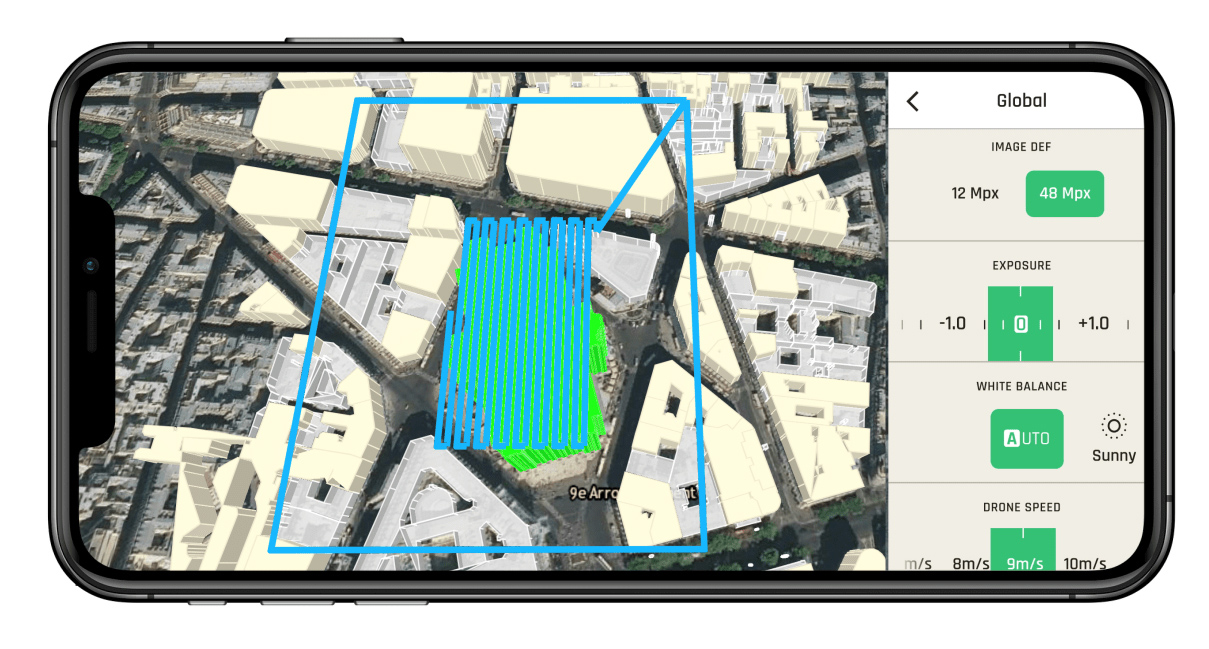 תוכנית טיסה אוטומטית שנוצרה בלחיצה אחת במרשם המקרקעין התלת -ממדי.
תוכנית טיסה אוטומטית שנוצרה בלחיצה אחת במרשם המקרקעין התלת -ממדי. - הרקע הקרטוגרפי של FreeFlight 7 הוא מתוכנת ArcGIS. ייצוג הבניין התלת -ממדי מבוסס על נתוני OpenStreetMap המכסים ערים ברחבי העולם.
- מערכות ויזואליזציה מבטיחות את בטיחותה של תוכנית טיסה נתונה: משתמשים אינם צריכים לדאוג למכשולים. ANAFI Ai נמנעת מהם באופן אוטונומי.
טיסה אוטונומית
מערכת החיישנים ANAFI Ai חד -כיוונית, המבוססת על ראייה סטריאוסקופית, מכוונת את עצמה אוטומטית לכיוון הנסיעה.

המזל"ט מזהה מכשולים שנמצאים במרחק של 30 מטרים משם. טכנולוגיית AI בונה ומעדכנת כל הזמן את רשת המילוי תוך ביצוע תוכנית טיסה נתונה. הוא מייצג את סביבת המל"טים בווקסלים.
האלגוריתמים קובעים את המסלול הטוב ביותר להימנע מהתנגשות במכשולים בעוד המזל"ט נשאר ממוקד במטרה שלו: משימת הטיסה שהוקצתה.

חיבור 4G
ANAFI Ai הוא המיקרודרון המסחרי הראשון המצויד במודול 4G. הוא מכסה מעל 98% מהתדרים המשמשים ברחבי העולם.

סקר קווי מתח גבוה. צולם עם ANAFI Ai, נערך עם Pix4Dmatic. גודל סצנה: 4060 × 60 × 70 מ '. מספר התמונות: 2172. GSD: 1.3 ס"מ / פיקס. גובה: 90 מ '. חפיפה קדמית / צדדית: 90% / 65%.
המזל"ט מסוגל לעבור בצורה חלקה מ- Wi-Fi ל- 4G ולהיפך, ובכך לספק את החיבור האמין ביותר, אשר בתורו מבטיח:
- היכולת לבצע טיסות BVLOS
- חיבור יציב גם בעת טיסה בסביבות עם מכשולים ומבנים
- טיסה בטוחה בסביבות רעש גבוה
- איכות קישור וידאו 1080p @ 30 fps
- ) העלאה ישירה של תמונות לשרתי ענן

אופטימיזציה של זמן טיסה
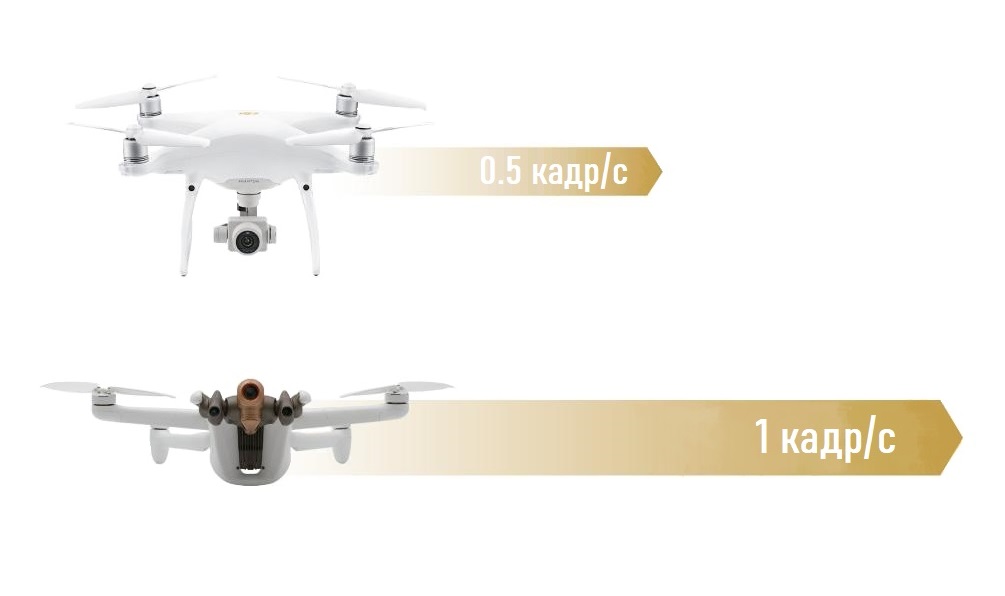
לדברי המפתח, הושגו חיסכון משמעותי בזמן בשל התמונה הגבוהה המאפיינים של ANAFI Ai:
- 48MP מאפשרת למזל"ט לעוף גבוה פי 1.5 ממל"טים עם חיישנים בגודל 20 אינץ ', תוך השגת אותו GSD. במילים אחרות, גובה גבוה יותר ומשימה מהירה יותר הולכים יד ביד.
- צילום של 1 fps: ANAFI Ai מצלם פעמיים מהר יותר Autel EVO 2 ו- DJI Phantom 4 Pro V2.0.
העברת 4G בטיסה ל- PIX4Dcloud
בתהליך יצירת דגם דיגיטלי מתצלומי אוויר של מזל"ט, העברת קבצים ועיבוד תמונות הן שתי משימות גוזלות זמן. ANAFI Ai מסייע למשתמשים להאיץ את זרימת העבודה שלהם. בפרט, מערכת המל"טים מאפשרת:
- העברת תמונות לשרתים מאובטחים ישירות במהלך הטיסה באמצעות חיבור ה- 4G של המזל"ט.
- התחל מיד לחשב אובייקטים בסוף הטיסה: אורתומוזאיקים, ענן נקודה, מודלים גובה ורשת מרקמת.
- שתף בקלות מפות דו -ממדיות וסקר מודלים תלת -ממדיים איכותיים עם עובדים ולקוחות.]]
פוטוגרמטריה או לידר
מדוע לבחור בפוטוגרמטריה לסקר ולסקירה? בנוסף לנגישות וקלות השימוש, פוטוגרמטריה אווירית היא הבחירה הטובה ביותר כאשר נדרשת פרשנות ויזואלית של נתונים.]
- יוצר ענן נקודות בעל צפיפות גבוהה יותר, שכל אחת מהן מכילה כמות מידע משמעותית (גובה, מרקם, צבע).
- עולה על LIDAR בדיוק של עיבודים דו -ממדיים ותלת -ממדיים פוטוריאליסטיים - LIDAR אינו מספק פירוט קונטקסטואלי ברמה גבוהה.
חסרונות LIDAR
- עולה פי 100 יותר ממל"ט עם מטריצת RGB.
- מורכבות עיבוד הנתונים ושגיאות פרשנות אפשריות.
- אפשר להוסיף מידע צבעוני, אך זה מסבך את התהליך.
- LIDAR מייצר ענן נקודות בלבד ומיועד למקרים ומצבים ספציפיים.
SDK
ערכת פיתוח תוכנת תוכים היא מערכת קוד פתוח של כלים ותוכנות למפתחים. מאז יצירתו של המזל"ט הראשון א.ר. Drone, תוכנת הקוד הפתוח של החברה עומדת בבסיס פלטפורמות וכלים למפתחים, ו Parrot
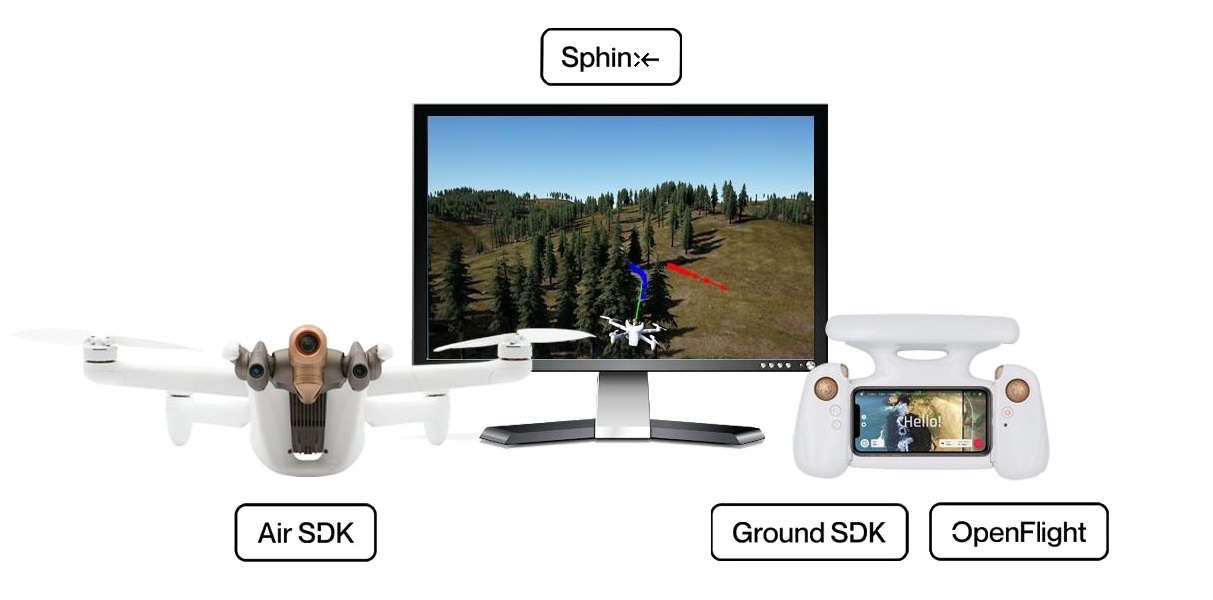
היזם מבהיר כי כל משאבי ה- SDK של החברה זמינים ללא תשלום, ללא רישום ומעקב, בפורטל " תוכים פורטל המפתחים"... תוכל גם להצטרף לאלפי המפתחים בפורום תוכים, שם תוכל לדון בנושאים עכשוויים ישירות עם מהנדסי החברה.
Air SDK
הפעל את הקוד שלך ב- ANAFI Ai
Air SDK מספק ארכיטקטורה טכנולוגית מהפכנית להורדה והפעלה של קוד ישירות ב- ANAFI Ai. מפתחים יכולים לתכנת משימות טיסה מעוצבות בהתאמה אישית עם גישה לכל חיישני המל"טים, ממשקי החיבור ופונקציות הטייס האוטומטי.
Air SDK מספק גישה משולבת ל:
- כל החיישנים (IMU, GPS, TOF) ומצבי טיסה
- זרם ומטא נתונים עם כל המצלמות
- ממשקי תקשורת Wi-Fi, 4G, USB
- מפות עומק ורשתות מילוי
- יצירת מסלול הימנעות ממכשולים
כל מפתח יכול:
- לשנות את מצב המזל"ט על ידי יצירת משימות טיסה
- לשנות את מצב הניווט
- להוסיף תהליכי לינוקס מוטבעים (עבור לדוגמה, העבר נתונים דרך ערוץ 4G או השתמש בראיית מחשב)
ה- Air SDK תומך בשפת התכנות C או Python. Air SDK מגיע עם מדריך התקנה מפורט ותיעוד API. דוגמאות רבות ליישום ממחישות את כל האפשרויות שמציעה הארכיטקטורה הייחודית שלה.
SDK קרקע
בנה אפליקציה ניידת עוצמתית
Ground SDK היא פלטפורמת תוכנה לתחנת בקרת קרקע (GCS) עבור מכשירים ניידים (iOS ו- Android נתמכים). הוא מאפשר לכל מפתח ליצור יישום סלולרי ל- ANAFI Ai לשליטה עוקבת על המזל"ט ישירות מהמכשיר הנייד. כל פונקציות BVS (שליטה, וידיאו, הגדרות) זמינות באמצעות ממשק API קל לשימוש ומתועד במלואו.
OpenFlight
תחנת בקרת קרקע בקוד פתוח
בפעם הראשונה, Parrot פותח את קוד המקור ליישום תחנת הבקרה הקרקעית שלו. OpenFlight הוא הליבה של אפליקציית FreeFlight 7 המפורסמת שלנו של קוד פתוח. זה מאפשר למפתח להתמקד בהוספת פונקציונליות משלו ולייד יש אפליקציה בעלת מראה מקצועי המוכנה לפרסום ב- AppStore.

OpenFlight מכיל:
- כל UX FreeFlight 7
- כל הגדרות הממשק
- קוד להדמיה תלת מימדית בזמן אמת של מכשולים
- קוד לניהול תקשורת 4G
- OpenFlight מתפרסם תחת רישיון BSD-3 עם מדריך התקנה מלא ותיעוד מקיף.
ספינקס
סימולציה פוטוריאליסטית תלת מימדית
ספינקס התוכי הוא כלי סימולציות מזל"ט מתקדם. מהנדסי תוכים משתמשים בו כדי לפתח ולבדוק את כל התכונות של ANAFI Ai. התפיסה הכללית היא לדמות את הקושחה בפועל של המזל"ט עם כל החיישנים שלו בסביבה מציאותית ויזואלית ופיזית.

ספינקס התוכי מאפשר:
- לדמות את כל המצלמות והחיישנים
- לדמות מפות עומק ופילוח תמונות
- נווט בסצנות תלת מימד מציאותיות רבות
- התחבר לסוגים שונים של שלטים
- השתמש בתסריטים לשליטה בסימולציה
- הוסף הולכי רגל ורכבים
- דמיינו והקליטו נתוני טיסה
- התאימו את חיישני המטוסים והאלמנטים הפיזיים שמסביב
- שלטו בגורם בזמן אמת
ספינקס התוכי בנוי על בסיס תקן מתקדם רכיבים:
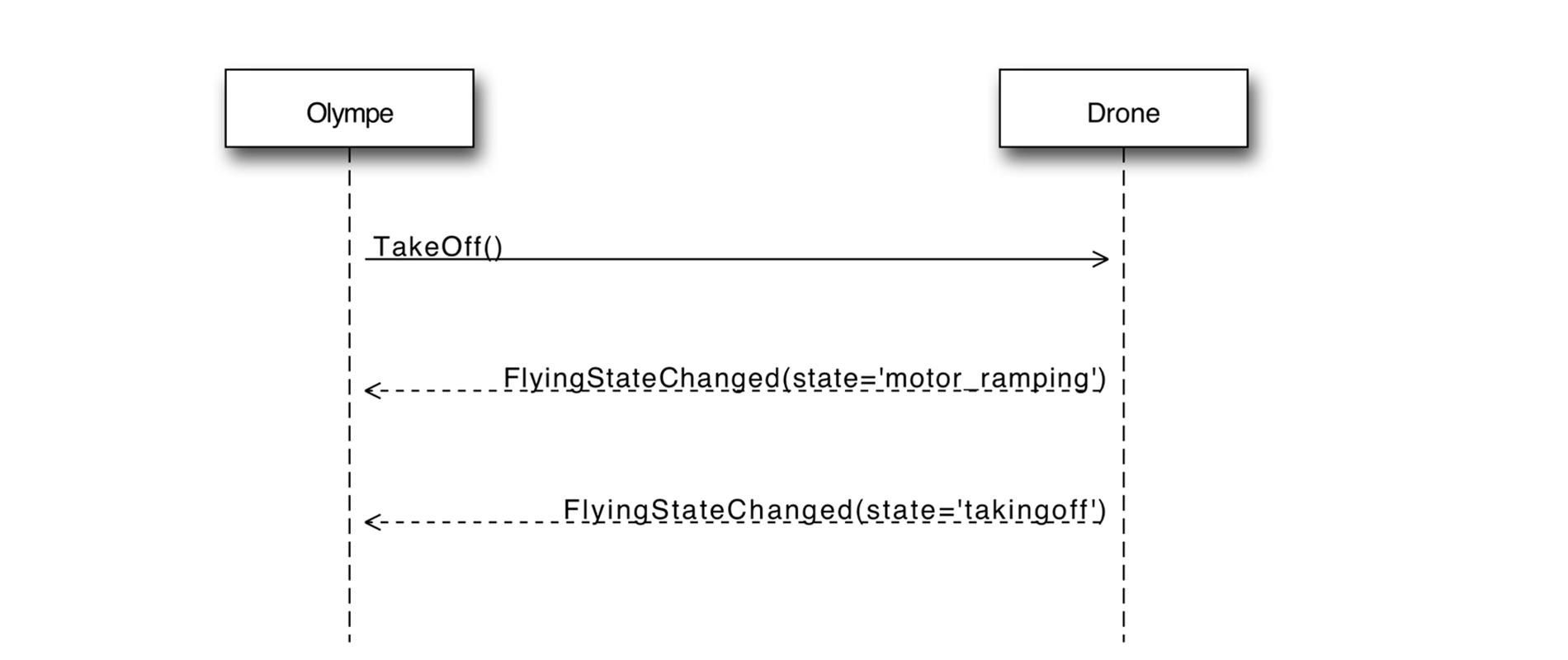
אולימפה
פייתון לשליטה ב- ANAFI Ai
אולימפה מספקת ממשק תכנות של בקר פייתון עבור ANAFI איי. המטרה המקורית של אולימפה הייתה אינטראקציה עם סביבת הדוגמנות של הספינקס. Olympe יכול גם לשלוט ב- ANAFI Ai פיזי ממחשב מרוחק.], תוכנית טיסה)
- התחל והפסק הזרמת וידאו מכל המצלמות
- הקלט זרם וידאו ומטא נתונים מסונכרנים
) PdrAW
נגן מדיה מתקדם
PDrAW הוא מציג וידאו מתקדם עבור מדיה ANAFI Ai. הצופה תומך הן בהזרמה (RTP / RTSP) והן בוידאו מוקלט (MP4) בפלטפורמות Linux, macOS, Android ו- iOS. PDrAW מגיע כספרייה (libpdraw), ספריית עטיפות (libpdraw-backend) וכפעלה עצמאית (pdraw).
PDrAW מנהל גם מטא נתונים של וידאו. ב- ANAFI Ai, הזרמת ווידאו מוקלט כוללות מטא נתונים זמינים לציבור ומתועדים, ומאפשרים עיבוד וידאו אווירי מתקדם.
דגמים C. A. D.
Parrot מספק מודלים תלת -ממדיים של מזל"ט שלהם לשילוב בעיצוב ה- CAD שלך לאב טיפוס מהיר ואינטגרציה של אביזרים.
תאימות MAVLink ו- GUTMA
ANAFI Ai תואם לפרוטוקול הסטנדרטי של קוד פתוח MAVLink v1, המאפשר חילופי נתונים בזמן אמת בין המל"ט לתחנת הבקרה. ניתן לשלוט ב- ANAFI Ai באופן ידני או באמצעות תכנון טיסה אוטומטי מתחנת בסיס תואמת MAVLink כגון QGroundControl.
* ממשק QGroundControl
ANAFI Ai תואם את פרוטוקול נתוני הטיסה הסטנדרטיים של קוד פתוח מסוג GUTMA. איגוד UTM העולמי הוא קונסורציום של שחקנים מרכזיים בתחום הבקרה בתעבורה האווירית.

המערכת האקולוגית השותפת הגדולה ביותר למזל"טים תוכי
תוכה ממשיכה להרחיב את המערכת האקולוגית העולמית של ספקי תוכנה למל"טים באמצעות תוכנית ה- SDK השותפה שלה מציעה פתרונות מיוחדים וייחודיים לצרכים הגוברים והמתפתחים של משתמשים מקצועיים.] תכנון ויבוא של יומני טיסה, לפני צילום, מיפוי, ניטור וניתוח הנתונים שהתקבלו.
PIX4D × תוכים
יישומי דוגמנות 2D / 3D. קבוצה ייחודית של יישומי פוטוגרמטריה לנייד, שולחן עבודה וענן.
Verizon x Skyward x Parrot
פתרון מזל"ט 4G LTE בארצות הברית. מל"ט רובוטי מסוג ANAFI Ai הראשון מסוגו המחובר לרשת Verizon 4G LTE עם תוכנת Skyward מותקנת מראש. פותח את הדלת להעברת נתונים כמעט בזמן אמת, פריסות מרחוק וטיסות מחוץ לטווח ראייה.

Skyward × תוכים
אינטגרציה ולמידה בתוך יכולת ANAFI. פלטפורמת ניהול תעופה הכוללת מרחב אוויר, גישה ל- LAANC והדרכה, ציוד וקישוריות לפריסת צי מזל"ט ארגוני.

DroneSense × Parrot
בנה, נהל והגדל את תוכניות המל"טים שלך. אנשי מקצוע לא מאוישים ברכב אווירי במגזר הבטיחות הציבורית יכולים להשתמש בחבילה המלאה של יכולות DroneSense, שתוכננו במיוחד לצרכי המגיבים הראשונים.

Parrot Ecosystem Partners

תוכנית שותפים לתוכי
היזם מציע להרחיב את יכולות את התוכנית שלו למל"טים על ידי שילוב ה- SDK שלהם.
אבטחת סייבר
סודיות הנתונים
היזם מציין כי הוא אינו אוסף כל נתונים ללא הסכמת משתמשים. ההחלטה אם להעביר נתונים לתשתית התוכי או לא, מוטלת אך ורק על המשתמשים עצמם. הנתונים המתארחים ב- Parrot מאפשרים למשתמש לסנכרן נתוני טיסה ותוכניות טיסה בין מכשירים שונים, כמו גם להקל על התמיכה ולאפשר ל- Parrot לשפר את מוצריה.
ANAFI Ai תואם את תקנת הגנת הנתונים הכללית של האיחוד האירופי (GDPR) והולך רחוק יותר, למשל, מאפשר לך למחוק את כל הנתונים בלחיצה אחת, ובכך לספק למשתמשים את השליטה הקלה ביותר.בעיה זו בלחיצה אחת נפתרת ביישום FreeFlight7 לנייד או בהגדרות הפרטיות של חשבון Parrot. Cloud. לפיכך, משתמשים בכל עת יכולים לא רק להפסיק את חילופי הנתונים, אלא גם לבקש את מחיקתם בקלות.
אם המשתמש מסכים לחילופי נתונים, עיבודו יתבצע בפורמט שקוף לחלוטין, המתואר בפירוט במדיניות הפרטיות של תוכים.
כאשר ANAFI Ai מחובר ל- Skycontroller 4 באמצעות 4G, תשתית Parrot משמשת לזיווג המזל"ט והבקר המרוחק. אם המשתמש אינו מחובר לחשבון Parrot. Cloud, הוא עדיין יכול להשתמש בחיבור 4G עם חשבון זמני ייחודי. בעת שימוש בתשתית Parrot לזיווג 4G, הסרטון מוצפן באמצעות מפתח שהוסכם בין המזל"ט לשלט הרחוק, ל- Parrot אין גישה לסרטון לא מוצפן.

תואם FIPS140-2 ותקן CC EAL5 Secure Element
ANAFI Ai כולל רכיב אבטחה מובנה מסוג Wisekey התואם NIST FIPS140-2 רמה 3 וקריטריונים משותפים EAL5 מוסמכים. רכיב אבטחה דומה מובנה גם בחומרת הבקרה Skycontroller 4.
פונקציות רכיב האבטחה:
- מבצעת פעולות קריפטוגרפיות
- מאחסן ומגן על מידע סודי
הוא משתמש במפתח אישי ECDSA עם פרמטרי תחום P521, שהוא ייחודי לכל מזל"ט. לא ניתן לחלץ אותו מרכיב האבטחה. והתעודה המשויכת למפתח זה חתומה על ידי רשות אישורים.
Wisekey מגן על תקינות הקושחה, מספק זיהוי מזל"ט ייחודי לזווג 4G ואימות חזק וחתימה דיגיטלית ייחודית של תמונות שצילם המזל"ט.

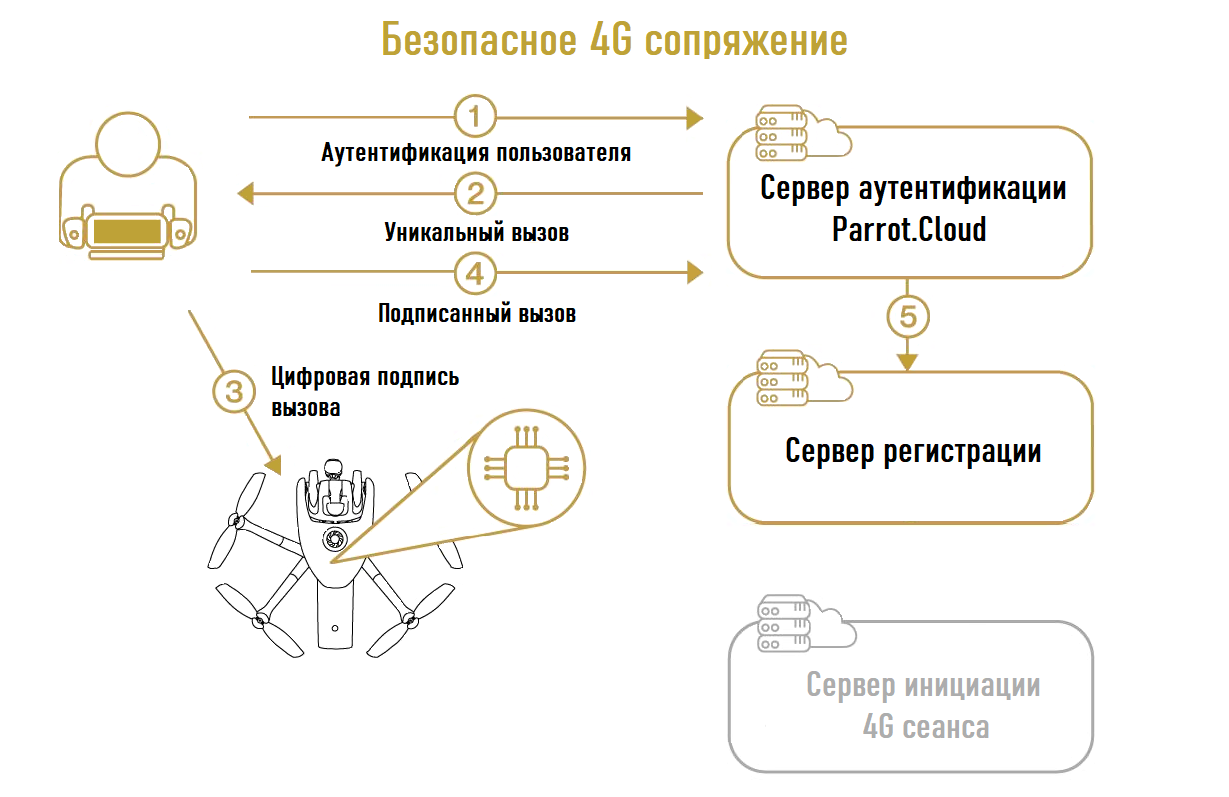
חיבור מאובטח 4G ואימות חזק
תהליך זיווג בטוח של מכשירים. במהלך תהליך זה, המשתמש מאשר באופן מהימן שהוא מחובר למזל"ט ספציפי. הודות ל- ANAFI Ai Secure Element, הוא יכול לעשות זאת מבלי להזין סיסמה בתוך המזל"ט.
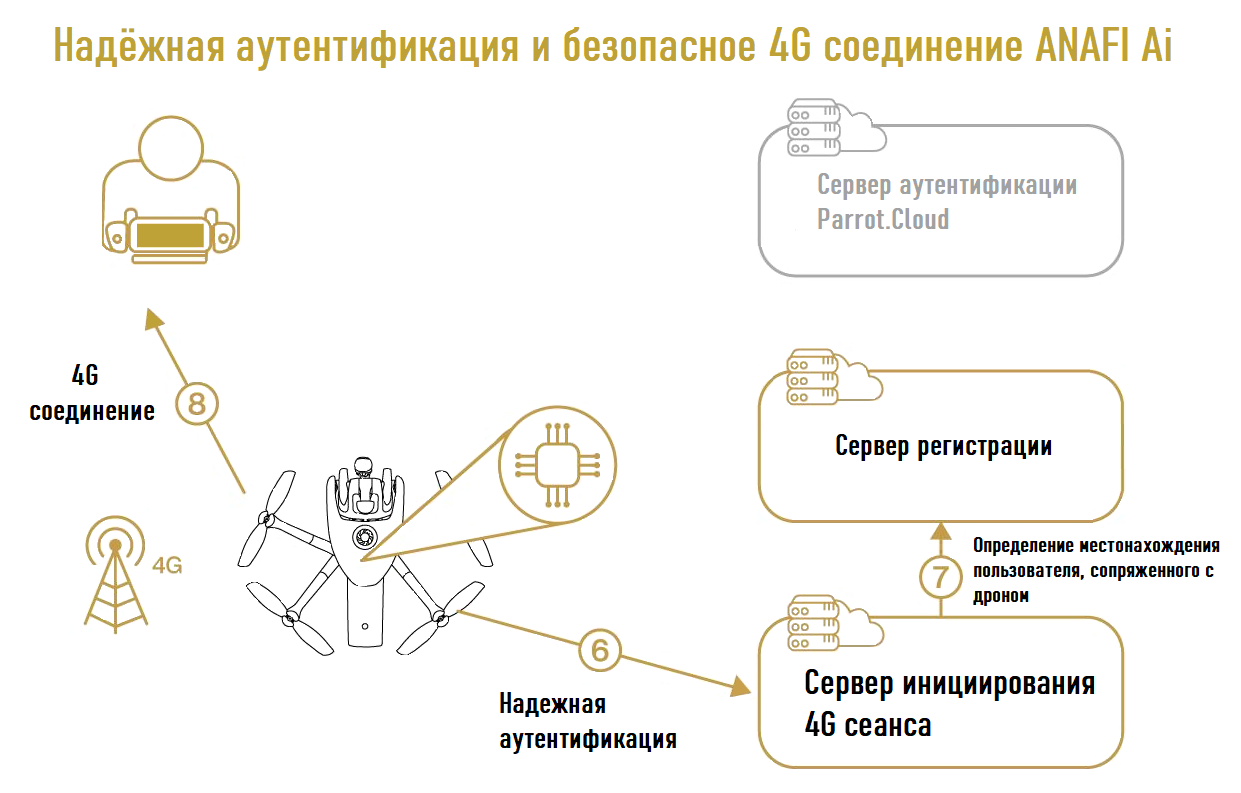
שרתי התוכי ואז רושמים את התקשורת בין המשתמש למזל"ט. כאשר חיבור ה- Wi-Fi בין המשתמש למזל"ט אבד, ANAFI Ai יעבור אוטומטית לחיבור 4G. ANAFI Ai מבצעת אימות חזק בשרתי תוכים באמצעות המפתח הפרטי שלה המאוחסן ברכיב המאובטח. שרתי תוכים מחפשים משתמשים מחוברים ומספקים ממשק בין ANAFI Ai ו- Skycontroller 4.
כדי להגן על בקרת מזל"טים וזרמי וידאו המגיעים ל- Skycontroller 4, ANAFI Ai תומך בפרוטוקולי TLS, DTLS ו- SRTP.
אתחול ושדרוג בטוח
רצף האתחול של המטוס מוגן: המערכת בודקת שהיא משתמשת בתוכנת Parrot ושהתוכנה הזו לא חבלה. בדיקת אבטחה מתבצעת בכל אתחול. שירות העדכונים שולט גם בחתימה הדיגיטלית של עדכוני תוכנה.
הגדרת מפתחות משתמש ברכיב המאובטח
למשתמשי ANAFI Ai יש גישה לחשבון מפעיל מיוחד של Secure Element. חשבון זה משמש להגדרת מפתחות הרלוונטיים למשתמש זה. משתמשים יכולים להגדיר את האלמנט המאובטח בעזרת המפתחות הציבוריים של ספקי המשימה שהם סומכים עליהם. ANAFI Ai תבצע משימות שנחתמות רק באמצעות מפתחות אלה. תהליך זה מונע מהתוקפים לבצע משימות טיסה זדוניות במזל"ט.
תמונות בחתימה דיגיטלית
רכיב מאובטח מ- ANAFI Ai יכול לחתום דיגיטלית על תמונות מזל"ט. חתימה זו היא הוכחה לכך:
- התמונה החתומה שצולמה צולמה על ידי הרכב האווירי הבלתי מאויש המצוין.
- לא התמונה עצמה ולא המטא -נתונים שלה עובדו (מרצון או לא) - המטא נתונים, המכונים גם EXIF ו- XMP, מכילים מידע על התאריך, השעה והמיקום של התמונה.

במילים אחרות, החתימה הדיגיטלית מגינה על כל הנתונים הקשורים לתמונה, כולל המקום והזמן שבו צולמה, ואילו מזל"ט ANAFI Ai.
משתמשים כמו גם שותפים המציעים פתרונות תוכנה באמצעות צילום מזל"ט יכולים לאמת את החתימה הדיגיטלית של תמונות ANAFI Ai באמצעות תעודת מזל"ט או באמצעות קטלוג המפתחות הציבוריים שמספק Parrot.
שקיפות ובדיקות אבטחה מתמשכות עם Bug bounty
Parrot משתמש בפרוטוקולים סטנדרטיים ופורמטים של קבצים בכל הזדמנות אפשרית. אין קוד מטושטש או תכונות נסתרות. זה מאפשר למשתמש להבין כיצד מוצרי תוכים פועלים ולבדוק את בטיחותם. בנוסף, OpenFlight, התוכנה המשמשת לשליטה במזל"ט, היא קוד פתוח, המעניקה למשתמשים שליטה מלאה.
באפריל 2021 השיקה פארוט את תוכנית באג באונטי עם YesWeHack, פלטפורמת האבטחה הראשונה באירופה. באמצעות שותפות זו, Parrot ממנף את קהילת המחקר העצומה של אבטחת הסייבר של YesWeHack כדי לזהות נקודות תורפה אפשריות במל"טים שלה, באפליקציות לנייד ובשירותי אינטרנט.
תוכנית באג באונטי מורכבת משני שלבים:
תוכניות פרטיות מספקות בתחילה גישה בלעדית לחוקרי אבטחה נבחרים וכוללות דגמי מזל"ט תוכים עתידיים.הניסיון והכישורים המגוונים של החוקרים יאשרו את רמת האבטחה הגבוהה של המוצרים לפני שהם יוצאים לשוק, מה שיסייע לשפר את בטיחות משתמשי התוכי והגנה על הנתונים שלהם.
לאחר סיבוב ראשון זה של התוכנית הפרטית באג באנטי ולאחר מסחור, המוצרים נכנסים לתוכנית הציבורית. אז אבטחתם נבדקת בקפדנות על ידי כל קהילת YesWeHack של למעלה מ -22,000 חוקרי אבטחת סייבר.

ניהול נתונים
ענן תוכים מאפשר למשתמשים שבוחרים לשתף את הנתונים שלהם לנהל נתוני טיסה וצי, כמו גם מולטימדיה. נתונים שהתקבלו על ידי המל"טים שלהם.
נתונים שנאספו
ענן תוכים אוסף 4 סוגי נתונים:
סטטי (נתוני מוצר):
- כלי טיס מספר סידורי
- מספר סידורי לסוללה
- גרסת קושחה של כלי טיס וסוללה
- גרסת חומרת כלי טיס וסוללה
- דגם התקנים
- שחרור FreeFlight 7 גרסה
אירועים
- התראות: סוללה, טייס אוטומטי, חיישנים
- תקשורת: חבר / נתק, התחל סטרימינג, התראה על הפרעות, אות חלש
- מצלמה: סטטיסטיקות סטרימינג, שינויי הגדרות
- טיסה: שינוי מצב (המראה, נחיתה, ריחוף וכו '), הפעלת משימת טיסה (תוכנית טיסה, פוטוגרמטריה)
"תמונות הקשר"
- Timelapse- תמונת מצב וכן (אחת ל -2 דקות)
- למידה מעמיקה (מיפוי אובייקטים נוספים, נופים לשיפור אוטונומיה של טיסה, מעקב, הימנעות ממכשולים)
- סטריאו (מפת עומק)
- תמונות מופעלות לפי אירוע
- התחלה וסוף של הצהרות רחף מדויקות, נחיתה מדויקת
- התרסקות מזל"ט
- פנים מטושטשות אוטומטית במהלך שידור
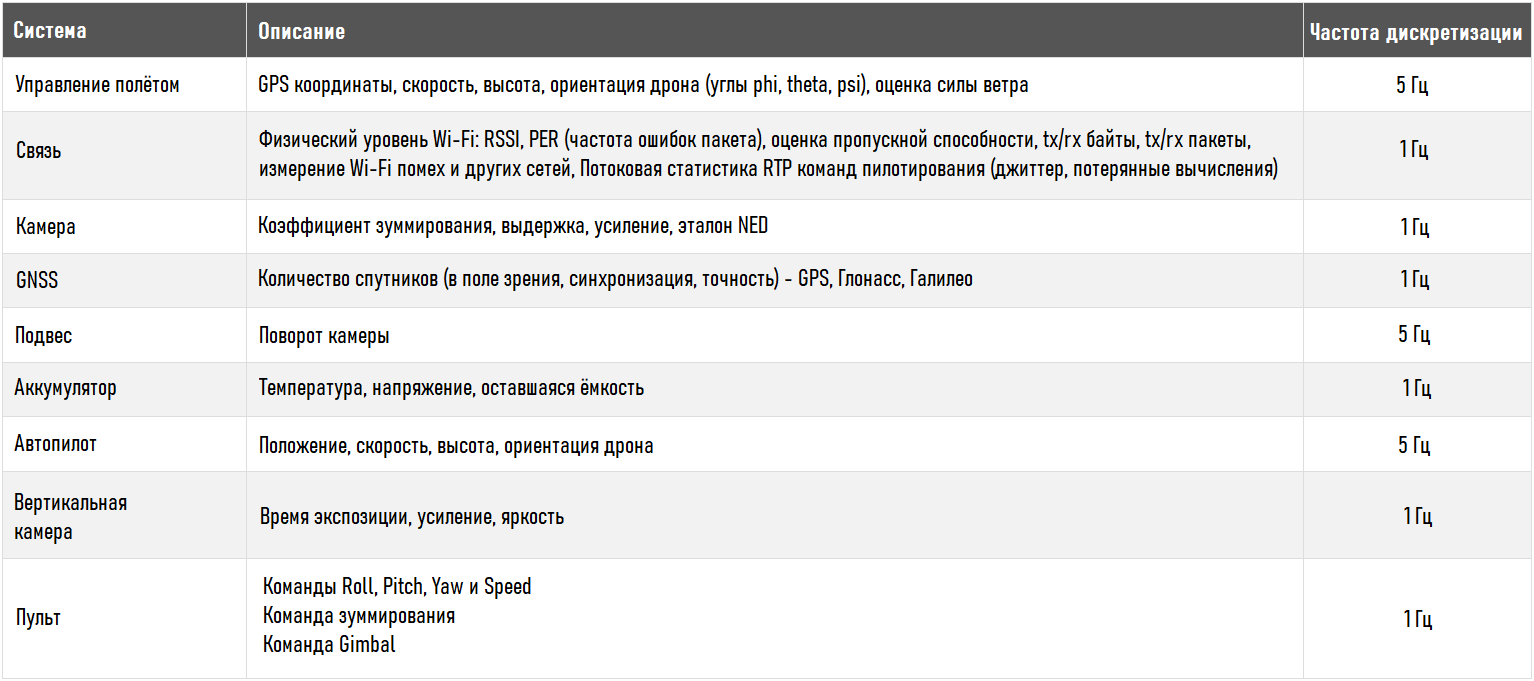
טלמטריה
]
שימוש סופי בנתונים שנאספו
תוכי אוסף ומשתמש רק בנתונים של לקוחות שהסכימו לשתף אותם על מנת לשפר את האיכות מהמוצרים שלה...
ניהול תחזוקה
תחזוקה מונעת: הכלים שלנו אוספים את כל המידע הקשור למשימות (סוג המשימה, זמני ההמראה והנחיתה, מספר המשימות, מיקום המל"טים, מהירות הטיסה, תוכנית טיסה והגדרות AirSDK). זה מאפשר לך לקבל מידע מדויק על המצב של צי המל"טים של ANAFI Ai (כמו גם הבקרים והסוללות שלהם) בזמן אמת.
תחזוקה מתקנת: המידע שנאסף שימושי לקביעת מצב מהיר של מזל"ט או סוללה מסוימים.
שיפור בינה מלאכותית (AI)
מרכיבי ה- AI של ANAFI Ai (PeleeNet, רשתות מתפתלות וכו ') מציעים למשתמשים שירותים ותכונות ללא תחרות: הימנעות ממכשולים, מעקב אחר מטרות, מספר מצבי טיסה. איכות ה- AI תלויה בכמות ובאיכות הנתונים שנאספו (תמונות וסרטונים): נתונים אלה מזינים למידת מכונה. מבחינה זו, איכות הנתונים אינה המרכיב המכריע היחיד: המטא -נתונים הקשורים לנתונים אלה הם גם בסיסיים. מסיבה זו, הכלי שלנו אוסף תמונות ומטא נתונים על בסיס קבוע ובהתאם לאירועים, בסך הכל של 30 עד 50 מגה בייט לדקה.
מאפייני טיסה
מאפיינים אווירודינמיים
כוננים ואווירודינמיקה
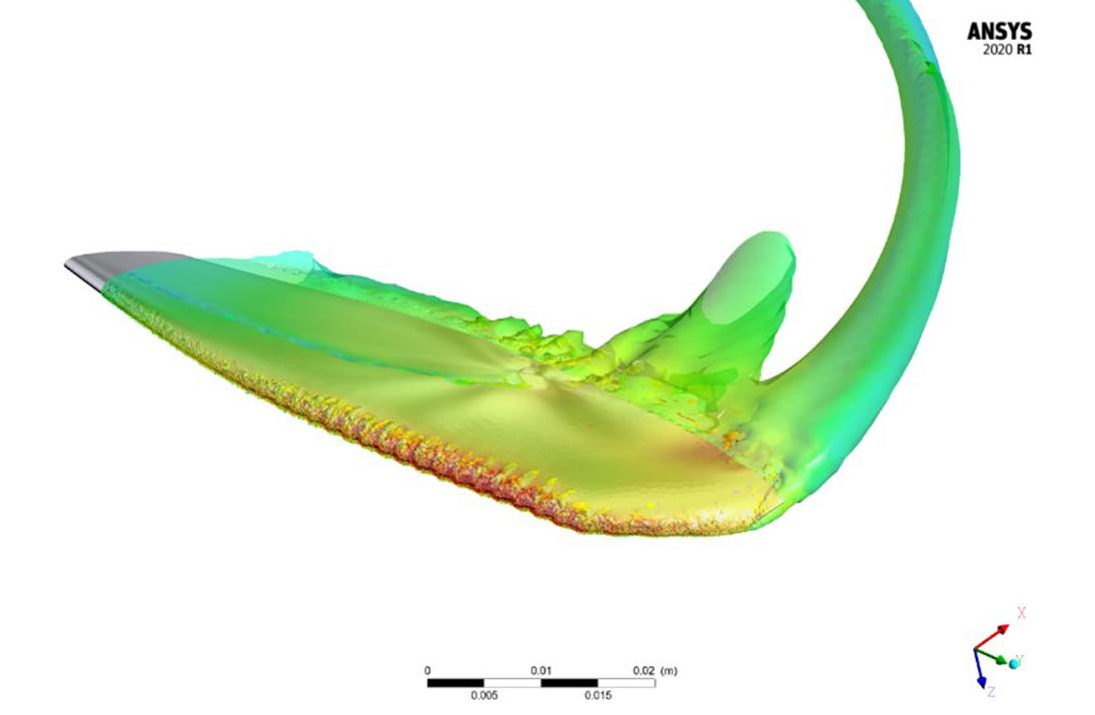 תמונת CFD של להבי מדחף ANAFI Ai
תמונת CFD של להבי מדחף ANAFI Ai
להבי מדחף ביומימיקים חדשים עם לווייתנים קדמיים דמויי גבנון. גישה זו אפשרה להגדיל את היעילות ההנעה של תחנת הכוח, אשר בתפוקה סיפקה עלייה בדחף באותה מהירות סיבוב. אפקט זה דומה לעלייה בקוטר הרוטור.
גם רעש אקוסטי, במיוחד רעש טונאלי, הבוקע מהקצה המוביל מצטמצם. לכן ANAFI Ai שקט יותר [71.5 dB SPL (A) בגובה 1 מ '] מאשר Skydio 2 [76.4 dB SPL (A) בגובה 1 מ'].
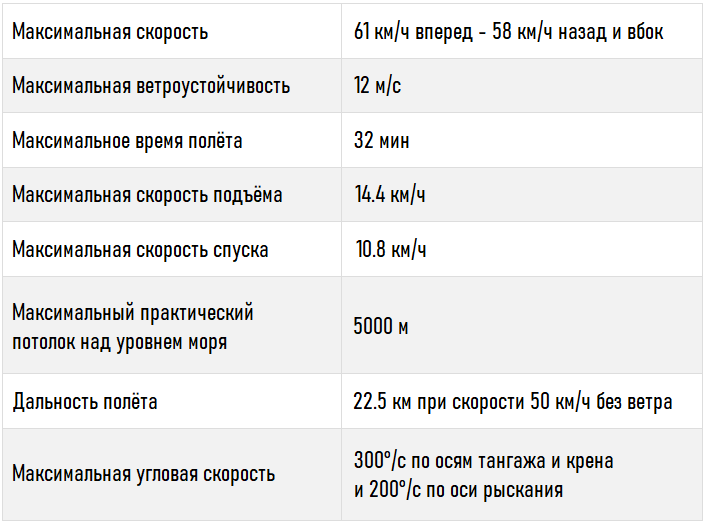
- זמן טיסה יותר מ -32 דקות
- הודות למאפיינים האווירודינמיים המותאמים של גוף המטוס ומערכת ההנעה ANAFI Ai, המהירות המרבית בטיסה קדימה היא 61 קמ"ש, עם טיסה צדדית וטיסה לאחור 58 קמ"ש
- מקסימום. עמידות לרוח 12.7 מ ' / ש.
- הודות ליעילות המומנט הגבוהה של המנוע / מדחף ואוטונומיה גבוהה של הסוללה, הטווח הוא 22.5 ק"מ (במהירות קבועה של 50 קמ"ש במזג אוויר רגוע).
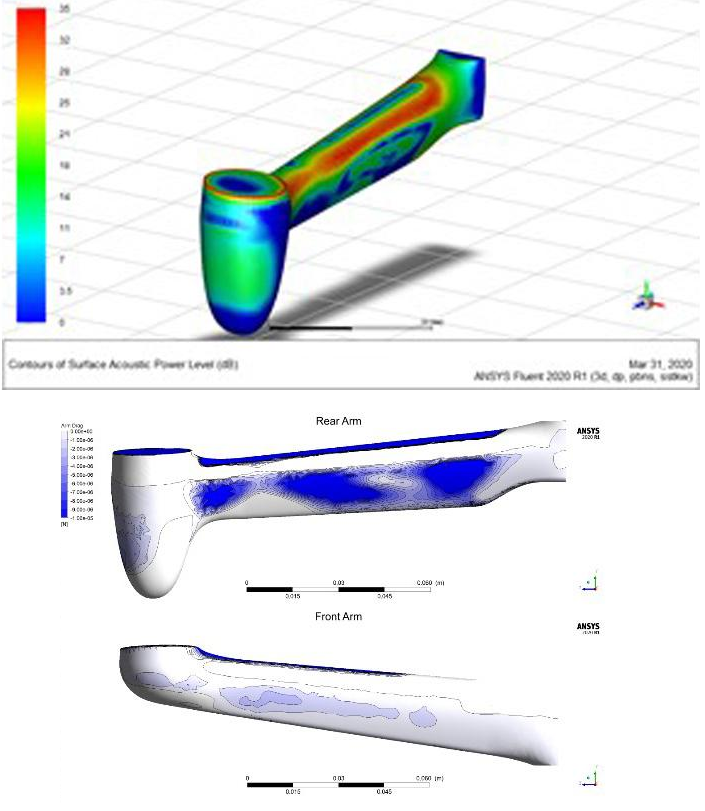 תמונות CFD של קורות AI של ANAFI
תמונות CFD של קורות AI של ANAFI
חיישנים
כדי להבטיח טיסה בטוחה ANAFI Ai מצויד ב:
- 2 × IMU (ICM-40609-D ו- ICM42605)
- מגנטומטר LIS2MDL
- מודול GPS UBX-M8030
- TI OPT3101 זמן טיסה (ToF)
- ברומטר LPS22HB
- מצלמה אנכית
מאפייני חיישן
)טיסה IMU: ICM-40609-D
- גירוסקופ 3 צירים
- טווח: ± 2000 ° / s
- רזולוציה: 16.4 LSB / ° / s
- קיזוז / דיוק: ± 0.05 ° / s (לאחר כיול תרמי ודינאמי)
- מד תאוצה 3 צירים
- טווח: ± 16 גרם
- רזולוציה: 2.048 LSB / מ"ג
- קיזוז / דיוק: ± 0.5 מ"ג (XY) ± 1 מ"ג (Z) (לאחר כיול תרמי ודינאמי)
- בקרת טמפרטורה ש: מערכת חימום מבוקרת ביחס לטמפרטורת הסביבה, מיוצבת בתוך: ± 0.15 ° C
- תדר מדידה: 2 קילוהרץ
מגנטומטר: LIS2MDL
- טווח: ± 49.152G
- רזולוציה: 1.5 mG
- קיזוז / דיוק: ± 15 mG (לאחר פיצוי, במהירות המנוע המרבית)
- תדר מדידה: 100 הרץ
ברומטר: LPS22HB 1
- טווח: 260 עד 1260 hPa
- רזולוציה: 0.0002 hPa
- קיזוז / דיוק: ± 0.1 hPa
- בקרת טמפרטורה: מערכת חימום מבוקרת ביחס לטמפרטורת הסביבה, התייצבה בתוך: ± 0.2 ° C
- תדר מדידה: 75 הרץ
- רעש מדידה: 20 ס"מ RMS
GNSS: UBX-M8030 1
- אנטנת תיקון קרמיקה 25 × 25 × 4 מ"מ, המאפשר שיפור רווח של 2 dB לעומת ANAFI 1
- רגישות: התחלה קרה -148 dBm / מעקב וניווט: -167 dBm
- תיקון זמן עד ראשון: 40 שניות
- דיוק / דיוק: מיקום (סטיית תקן 1.4 מ '), מהירות (סטיית תקן 0.5 m / s)
מצלמה אנכית
- חיישן תמונה פורמט: 1/6 אינץ '
- רזולוציה: 640 × 480 פיקסלים
- חיישן תמונה עם תריס עולמי
- שחור ולבן
- FOV: זווית ראייה אופקית: 53.7 ° / זווית ראייה אנכית: 41.5 °
- אורך מוקד: 2.8 מ"מ
- מדידת מהירות הזרימה האופטית על הקרקע ב 60 הרץ
- 15 הרץ והתאמה מדויקת @ 5Hz
ToF: TI OPT3101
- טווח: 0-15m
- רזולוציה: 0.3 מ"מ
- ) דיוק ב: ± 2 ס"מ (לאחר כיול)
- תדר מדידה: 64 הרץ
מצלמה אנכית IMU: ICM-42605
- גירוסקופ 3 צירים
- טווח: ± 2000 ° / s
- רזולוציה: 16.4 LSB / ° / s
- קיזוז / דיוק: ± 0.1 ° / s (לאחר דינמיקה כיול)
- מד תאוצה 3 צירים
- טווח: ± 16 גרם
- רזולוציה: 2.048 LSB / mg
- קיזוז / דיוק: ± 2.0 מ"ג (XY) ± 5.0 מ"ג (Z) - לאחר כיול דינאמי
- תדר מדידה: 1 קילוהרץ
- סנכרון חומרה עם מצלמה אנכית, דיוק: 1 מיקרון
טייס אוטומטי
בקר טיסת ANAFI Ai מספק ניסוי פשוט ואינטואיטיבי: אין צורך בהכשרה להפעלתו.הוא מאפשר לך להפוך אוטומטי למצבי טיסה (תכנית טיסה, מצלמת, המראה ידנית, RTH חכם). אלגוריתמים של היתוך חיישן משלבים נתונים מכל החיישנים כדי לאמוד את יחס ANAFI Ai, גובה, מיקום ומהירות.
הערכת מצב חיונית לתפקוד תקין של מל"טים. Quadcopters מטבעם אינם יציבים כאשר בקר הטיסה משמש עם לולאה פתוחה; כדי לשלוט בהם בקלות, שלא לדבר על שליטה אוטונומית, יש צורך לייצב אותם באמצעות אלגוריתמי בקרה בלולאה סגורה. אלגוריתמים אלה מחשבים ושולחים את הפקודות למנועים הנדרשים על ידי ANAFI Ai להשגת המסלולים הרצויים.

טיסה פנימית
בהיעדר אות GPS, ANAFI Ai מסתמכת בעיקר על מדידות מצלמה אנכיות כדי לאמוד מהירות ומיקום. ביצועי המצלמה האנכית נקבעים על ידי שני אלגוריתמים עיקריים:
- זרימה אופטית לאומדן מהירות
- זיהוי והתאמת נקודת מפתח להערכת מיקום
מצלמה אנכית אלגוריתמים יכולים לעבוד בתנאי תאורה נמוכה הודות ל- ANAFI Ai המצויד בזוג נורות LED הממוקמות ליד המצלמה האנכית. הם מאפשרים למזל"ט להישאר יציב, במיוחד כאשר הוא טס בתוך הבית או בהעדר GPS, בגובה של פחות מ -5 מטרים מעל הקרקע. העוצמה של נורות הלד מסתגלת אוטומטית, בהתאם לצרכי האלגוריתם.
טיסה אוטונומית
תכונות עיקריות
- מערכת חישה רוטרית עם שדה ראייה רחב
- מיצוי עומק החלל שמסביב מבוסס על יישור הסטריאו והעומק על ידי תנועה
- ייצוג הסביבה בצורה של רשת מילוי
- זיהוי אוטונומי והימנעות ממכשולים ב מהירויות של עד 29 קמ"ש
פרק זה מפרט את החיישנים, החומרה והאלגוריתמים בהם משתמשים ANAFI Ai כדי לאפשר טיסה אוטונומית. הוא מאורגן כדלקמן:
- תיאור מפורט של מערכת התפיסה של ANAFI Ai
- אלגוריתמים תפיסתיים המשמשים לשחזור סביבת התלת -ממד סביב המזל"טים
- תכנון מחדש ומכשול. הימנעות

אסטרטגיית מערכת תפיסה
תפיסת הסביבה התלת מימדית היא יכולת מפתח להשגת טיסה אוטונומית., במיוחד במקומות סגורים. זהו תנאי מוקדם לאיתור מובטח והימנעות ממכשולים, מה שמפחית את הנטל על מפעיל המל"ט, מגביר את הצלחת המשימה ומבטיח את בטיחות המטוס.
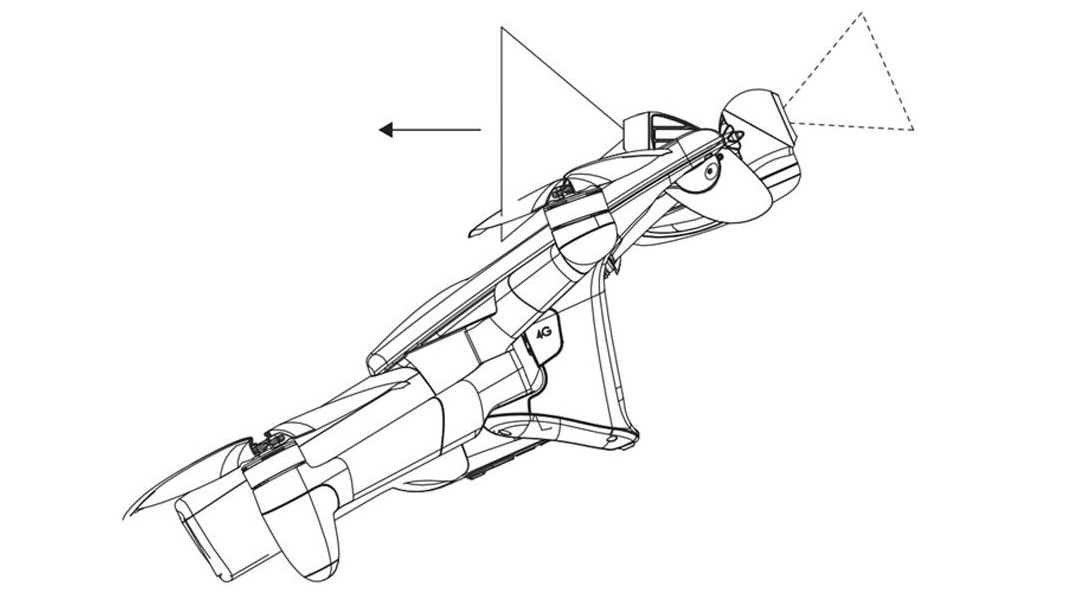
שחרור מלוא הפוטנציאל של מצלמה מעופפת, שיכולה לנוע ולסובב חופשי לכל הכיוונים ללא הגבלה, דורשת פתרון חישה יעיל.בפרט, מערכת החישה צריכה להיות מסוגלת לקבל מידע על הסביבה בכיוונים התואמים את התנועה קדימה בטיסה - ללא קשר לכיוון המצלמה.
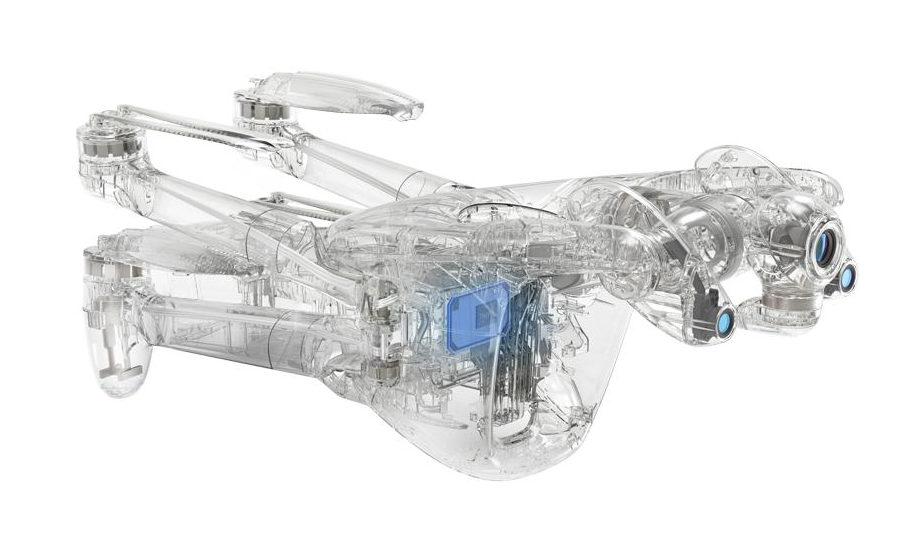
ANAFI Ai מסתמך על פתרון טכני ייחודי המבוסס על שני גימבלים מכניים להפרדת כיוון המצלמה הראשית ומערכת החישה:
- המצלמה הראשית מותקנת על 3 ציר גימבל, מה שהופך אותו לכיוון 3D ללא תלות בכיוון המזל"ט.
- מערכת החישה מותקנת על גימבל חד ציר - המחובר לתנועת הלסת של המזל"ט, ניתן לכוון אותה לכל כיוון.
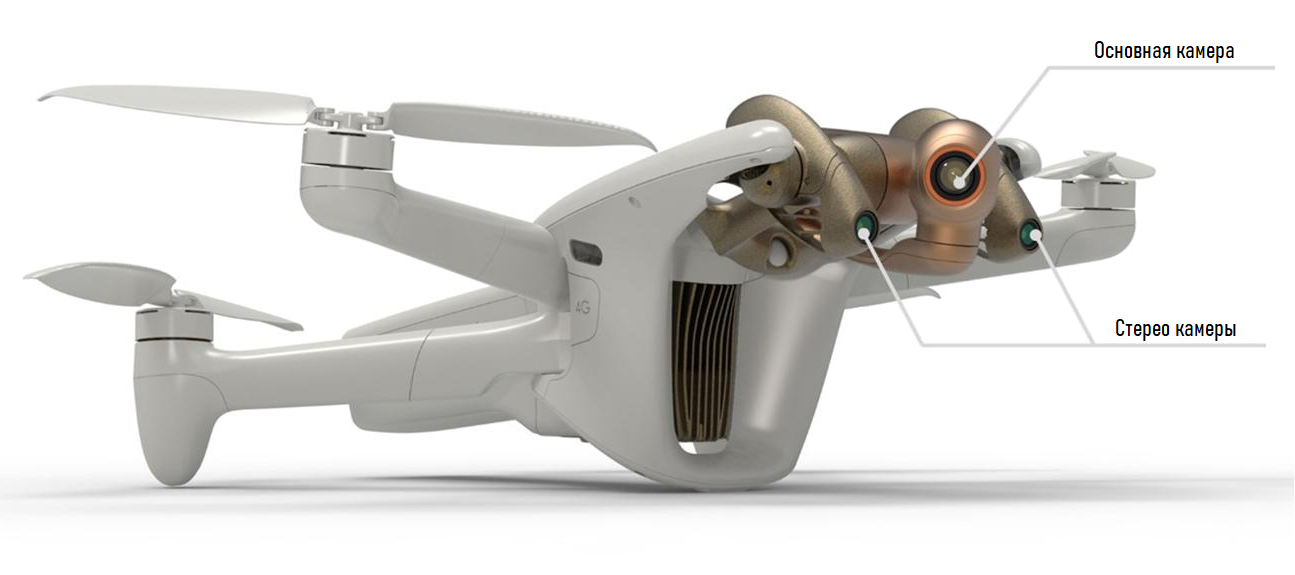 מייצב כפול ANAFI Ai לתפיסה והדמיה.
מייצב כפול ANAFI Ai לתפיסה והדמיה.
צירי ההטיה של שני הקולבים הם קולינריים ומשולבים ביניהם להשגת עיצוב אולטרה קומפקטי.
הודות לפתרון זה, ניתן לכוון את המצלמה הראשית ואת מערכת החישה לשני כיוונים שונים. עיצוב זה נמנע משימוש במצלמות יקרות בצדדים, בחלק העליון, התחתון והאחורי של המזל"ט תוך מתן שדה ראייה זמין גדול למערכת החישה.
סעיף זה מאורגן כדלקמן:
- פרטי החיישנים המשמשים את מערכת החישה
- מפרט הן לג'מבל המצלמה הראשית והן למערכת החישה גימבל
- אסטרטגיות למיקוד מערכת החישה לניצול הפוטנציאל של מבנה המתלים הכפול
חיישנים
מערכת החישה מבוססת על זוג של מצלמות זהות עם ציר גובה אחד...
 ציר מכני בעל ציר אחד למערכת החישה ANAFI Ai.
ציר מכני בעל ציר אחד למערכת החישה ANAFI Ai.
מפרטי החיישן הם כדלקמן:
- דגם: Onsemi AR0144CSSM28SUD20
- צבע: מונוכרום
- רזולוציה: 1280 × 800 פיקסלים
- קצב פריימים: 30 fps
- תריס גלובלי
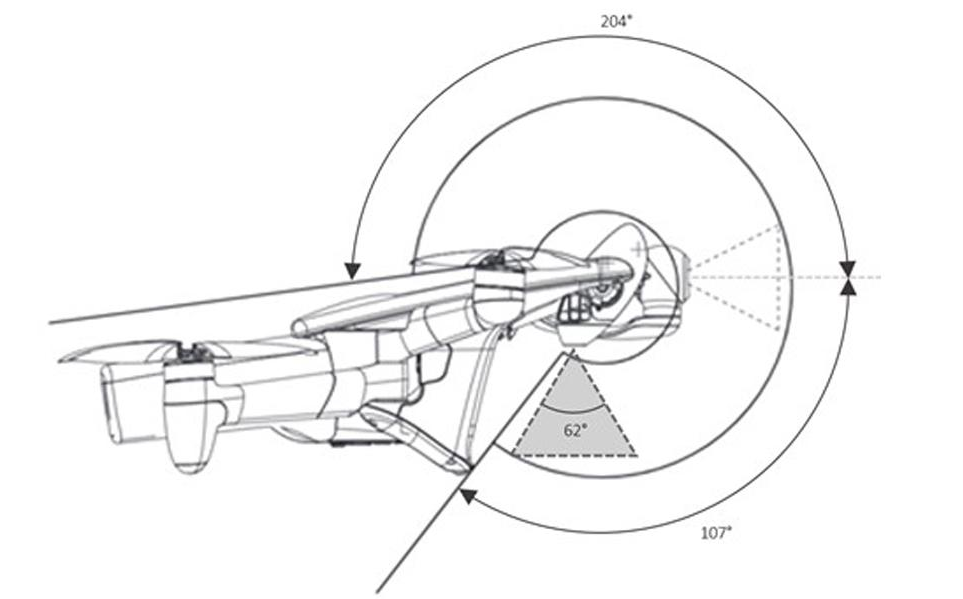
- שדה ראייה אופקי מלא: 118 ° (110 ° שמישים לחישה)
- שדה ראייה אנכי מלא: 72 ° (62 ° שמישים לחישה)
- אורך מוקד: 1.47 מ"מ (0.039 אינץ ' - 492.94610 פיקסלים)
- צמצם: f / 2.7
מפרט כיסאות הסטריאו הם כדלקמן:
- ציר המגרש הנפוץ
- בסיס / מרחק: 62 מ"מ (2.44 אינץ ')
- לכידה סינכרונית ב 30 fps
- מגבילים במגרש: -116 ° / 176 °
- מגביל גלילה: / -36 °
- מגבילים לפה: / - 48 °
ההשעיה המכאנית של מערכת החישה היא מתלה ציר יחיד בעל המאפיינים הבאים:
- עצירות קצה במגרש: -107 ° / 204 °
- זמן נסיעה מתחנת קצה אחת לאחרת: 300 ms
למערכת החישה יש נסיעה של 311 ° (מתוכן 296 ° אינה מוסווית על ידי גוף המזל"ט), המאפשרת לאחור תפיסה.
שדה ראייה אנכי מיידי ומערכות תפיסה מגבילות ANAFI Ai.
המערכת תוכננה כך ש:
- להבי המדחף אינם נכנסים לשדה הראיה של המצלמה הראשית
- הראשי המצלמה אינה מכסה את שדה הראיה של מערכת התפיסה
- ניתן לקפל את המצלמה הראשית ואת מערכת החישה באופן מלא לאחור כדי להגן על העדשות
 שדה הראייה האופקי של מערכת התפיסה ANAFI Ai.
שדה הראייה האופקי של מערכת התפיסה ANAFI Ai.
כאשר נשענת לאחור, מערכת התפיסה נעה למיקום העליון, ובכך מספקת מבט ברור.
תפיסת ANAFI Ai במצב שכיבה מלאה לטיסה אחורה.
שחזור הסביבה
שחזור הסביבה התלת מימדית שמסביב לטיסה אוטונומית מתבצע בשני שלבים:
- ) מיצוי מידע עומק מתפיסה בצורה של מפות עומק
- שילוב נתוני מפת עומק לרשת מילוי תלת ממדית
שתי שיטות משמשות להשגת מפות עומק מחיישני תפיסה.:
- עומק לפי יישור סטריאו
- עומק מתנועה
עומק מהתכתבות סטריאו
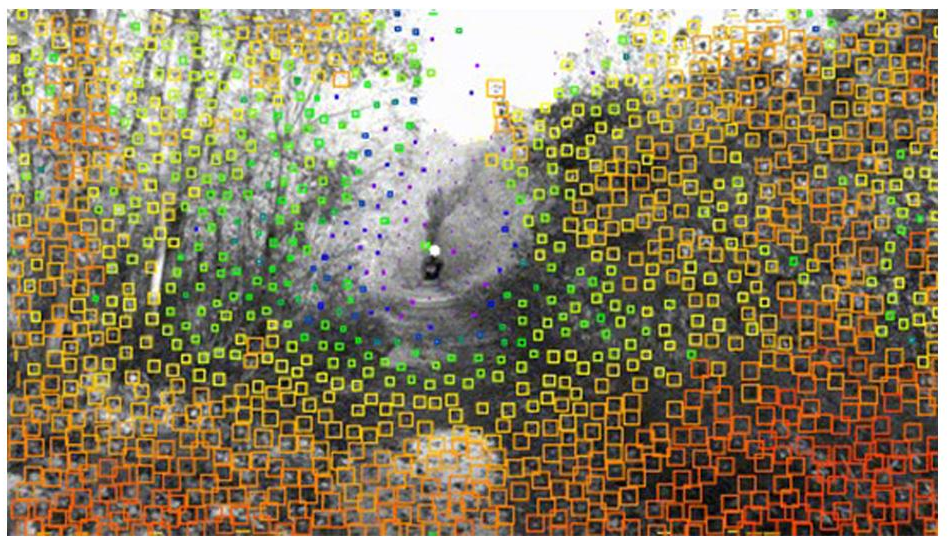
השיטה העיקרית לחילוץ עומק המידע מבוסס על מקבילות בין שתי מצלמות סטריאו של מערכת התפיסה. על ידי צילום הסביבה לכיוון אחד, אך משתי מיקומים שונים, אובייקטים בשדה הראייה של מערכת התפיסה מופיעים במיקומים שונים בתמונות המתקבלות על ידי שתי מצלמות. ככל שהנושא קרוב יותר, כך ההבדל בעמדה גדול יותר.
לפיכך, האסטרטגיה היא לקבוע את הנקודות בתמונות המתקבלות על ידי מצלמות הסטריאו השמאליות והימניות המתאימות לאותו אובייקט בשדה הראייה של מערכת החישה, ולמדוד את ההבדל במיקום של אלה נקודות בשתי התמונות. הבדל זה נקרא פער ונמדד במספר הפיקסלים.
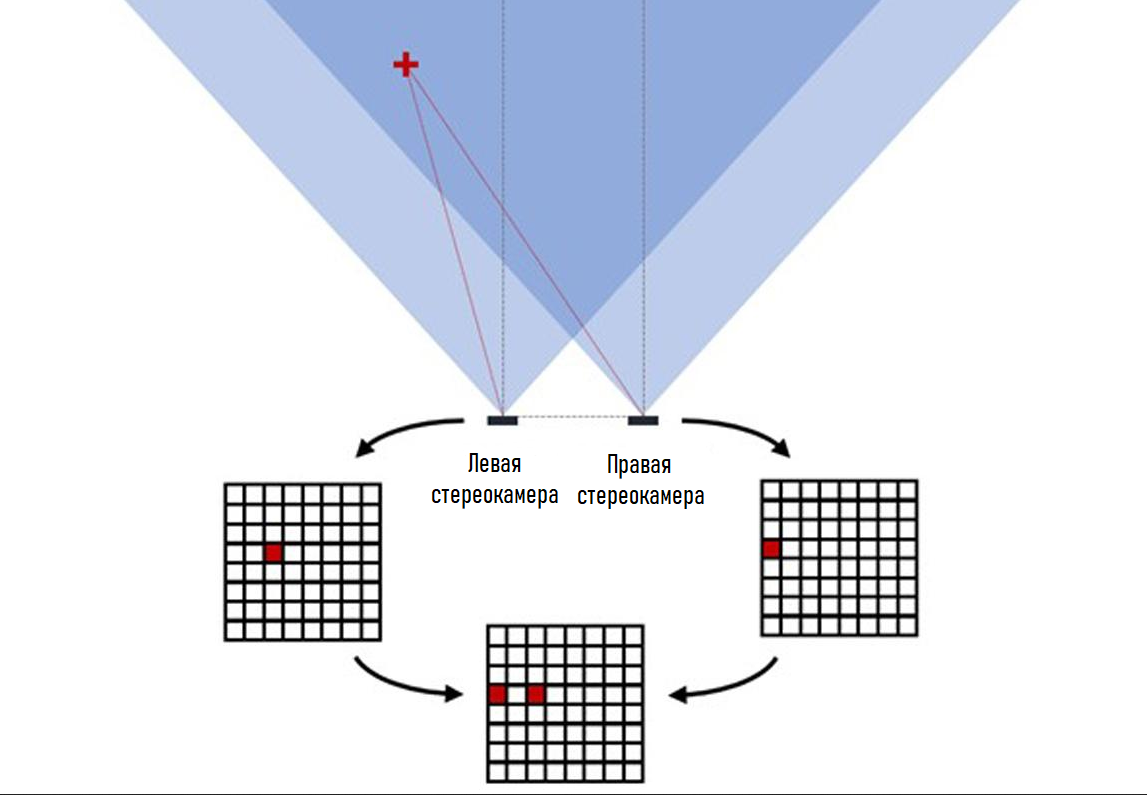 איור של עקרון ראיית הסטריאו - נקודת התלת מימד האדומה נמצאת במיקומים שונים בתמונות השמאליות והימניות.
איור של עקרון ראיית הסטריאו - נקודת התלת מימד האדומה נמצאת במיקומים שונים בתמונות השמאליות והימניות.
לאחר מכן ניתן לקשור את הפער לעומק כל אחת מנקודות אלה באמצעות עומק הקשר הבא = מוקד * בסיס / פער, כאשר העומק והבסיס מתבטאים באותן יחידות, והמיקוד אורך ופער מתבטאים במספר הפיקסלים.
תוצאת החישוב לובשת צורה של מפת עומק של 176 × 90 פיקסלים, שהערך של כל פיקסל מתאים לה לעומק במטר. מפת העומק מתרעננת ב -30 הרץ.
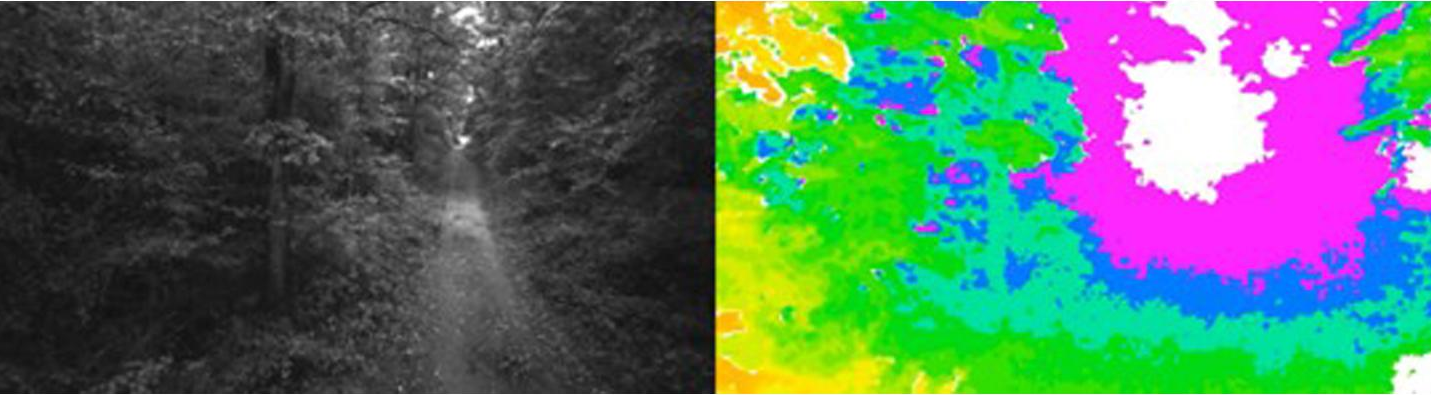
דוגמה לתמונה שצולמה במצלמה הימנית של מערכת החישה ANAFI Ai (משמאל) ולעומק המתאים המתקבל באמצעות הדמיה סטריאו (מימין). מפת הצבעים עוברת מאדום (קרוב יותר) לסגול (רחוק יותר) - לבן פירושו Out of Reach.
התוצאה המיידית מכך היא שהעומק הנמדד בשיטה זו מופרש, שכן הפער יכול לקחת רק ערכים נפרדים (מספר הפיקסלים). נקודה תלת מימדית הממוקמת מספיק רחוק ממערכת התפיסה ויוצרת פער פער תיאורטי של פחות מפיקסל אחד תיחשב לאינסופית, שכן הפער הדיסקרטי המתאים בפועל יהיה שווה ל 0. הדיוק של שיטת ההשוואה הסטריאו יורד עם הגדלת המרחק, למרות שיש הן שיטות שיכולות לצמצם תופעה זו על ידי השגת דגימת תת פיקסל.
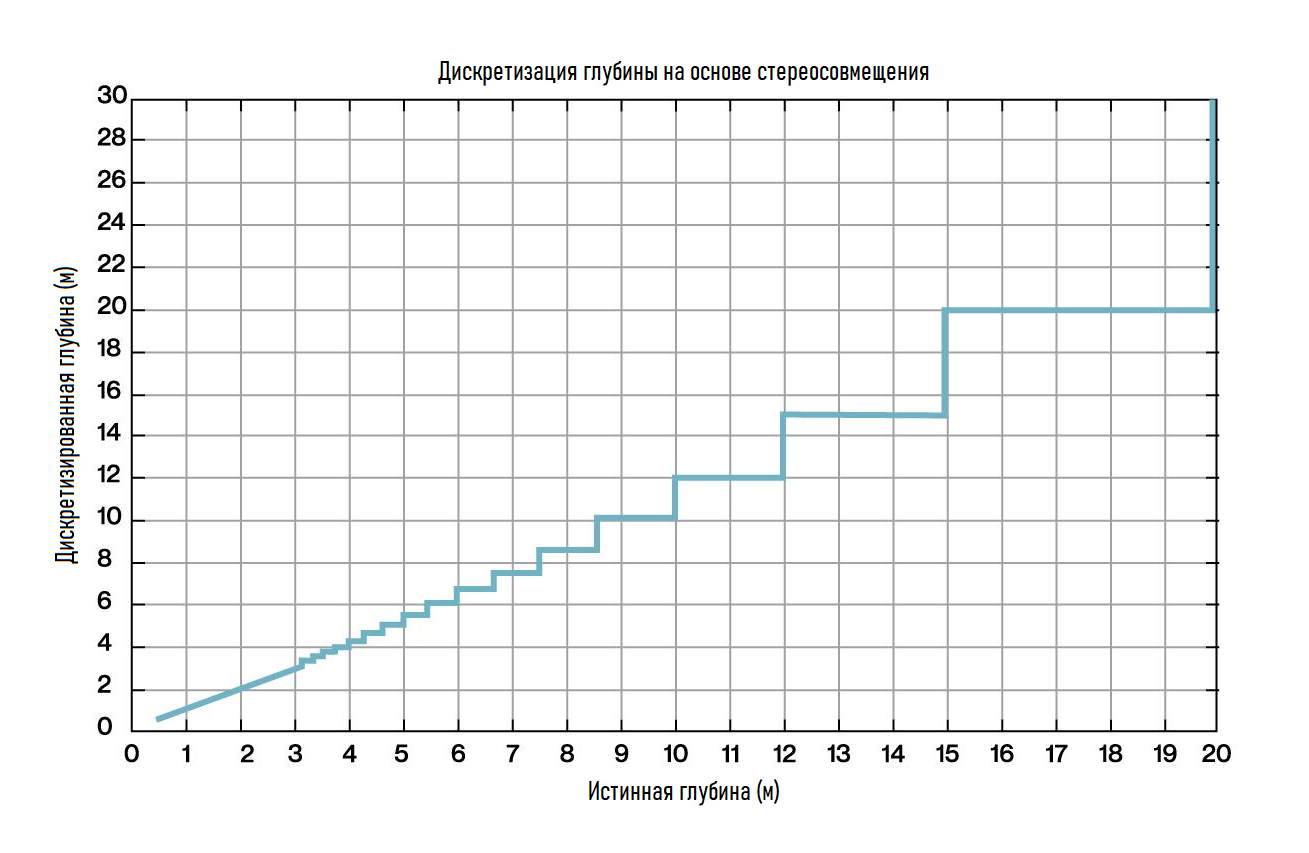 עומק מופרד כפי שנמדד על ידי "יישור סטריאו" מול "עומק אמיתי".
עומק מופרד כפי שנמדד על ידי "יישור סטריאו" מול "עומק אמיתי".
בנוסף, הפער משתנה כאשר העומק מתקרב לאפס.מכיוון שמספר הפיקסלים בתמונות מוגבל, גם ערך הפער מוגבל. כתוצאה מכך, יש עומק מינימלי שבו המערכת התפיסתית עיוורת. עומק מינימלי זה הוא 36 ס"מ עבור ANAFI Ai.
אודות כיול: כל זוג מצלמות סטריאו מכויל במפעל כדי למדוד במדויק פערים קטנים שעשויים להתקיים בין שתי המצלמות ולפצות על כך בחישובי עומק המשולבים.
המשתמש יכול גם לכייל מחדש זוג מצלמות סטריאו באמצעות תבנית הבדיקה המסופקת עם המזל"ט. בפרט, במידה מסוימת, הרחפן מסוגל לזהות טעויות כיול אפשריות שעלולות לצוץ במהלך חייו. במקרה זה, תוכנת המטוס תנסה להתאים ולפצות עליהן, ואם הדבר נכשל, תופיע הודעה המבקשת ממך לבצע כיול מחדש.
עומק מתנועה
ניתן להשתמש בתנועת המזל"ט גם לאיסוף תמונות של הסביבה מזוויות שונות ובכך לשחזר מידע עומק. טכניקה זו נקראת עומק מתנועה, או חישה חד -עינית, מכיוון שמצלמה אחת נעה מספיקה כדי לאסוף מידע עומק.] אם המזל"ט זז, אז התמונות של הצופה הייחודי הזה יילכדו מזוויות שונות. בידיעה של המיקום שבו כל מסגרת נלקחה, ניתן לשלב נקודות המתאימות לאותה תכונה בתמונות שונות ולהחזיר אותן לתלת מימד.
הפלט הוא ענן נקודות תלת ממדי המכיל עד 500 נקודות עבור ANAFI Ai, שנוצר בתדר של 10 הרץ.
 דוגמא לענן נקודה שנוצר על בסיס עומק מתנועה - מפת הצבעים עוברת מאדום (קרוב יותר) לסגול (רחוק יותר).
דוגמא לענן נקודה שנוצר על בסיס עומק מתנועה - מפת הצבעים עוברת מאדום (קרוב יותר) לסגול (רחוק יותר).
אלגוריתם ANAFI Ai Motion Depth בדרך כלל מייצר פחות מידע (ענן נקודה דלילה) מאלגוריתם ההתאמה הסטריאו ומחייב את המזל"ט לנוע כדי לאסוף מידע. בנוסף, אלגוריתם זה אינו יכול לחלץ מידע בכיוון התנועה המדויק (לפחות לשידורים חיים), שכן אובייקטים בתמונות נראים כמעט נייחים בכיוון זה (מיקוד הרחבה).
עם זאת, יש לו טווח זיהוי טוב יותר (טווח אינסופי מבחינה תיאורטית) מאשר התאמת סטריאו.
רשת מילוי
מידע עומק מאלגוריתמי חישה סטריאו וחד -עיניים משולב ברשת המילוי. רשת זו מדגמת את סביבת התלת מימד לקוביות תלת מימד הנקראות ווקסלים. לכל ווקסל מוקצה ההסתברות להיתפס על ידי מכשול או להיפך, להיות חופשי ממכשול.
אלגוריתם שידור קרן משמש לשילוב מידע עומק ברשת מילוי. עבור כל פיקסל של מפת העומק המתקבלת כתוצאה מהשוואת סטריאו, היא מומרת לנקודה תלת ממדית, ולכל נקודה של ענן הנקודות - לעומק המתקבל כתוצאה מתנועה:
- קרן נמשכת ברשת המילוי ממיקום מערכת התפיסה למיקום נקודת התלת מימד.
- ההסתברות של ווקסל המכיל נקודה תלת -ממדית גדלה.
- ההסתברות שכל הווקסלים שחוצים קרן שאינה זו המכילה את נקודת התלת מימד תפוסים.
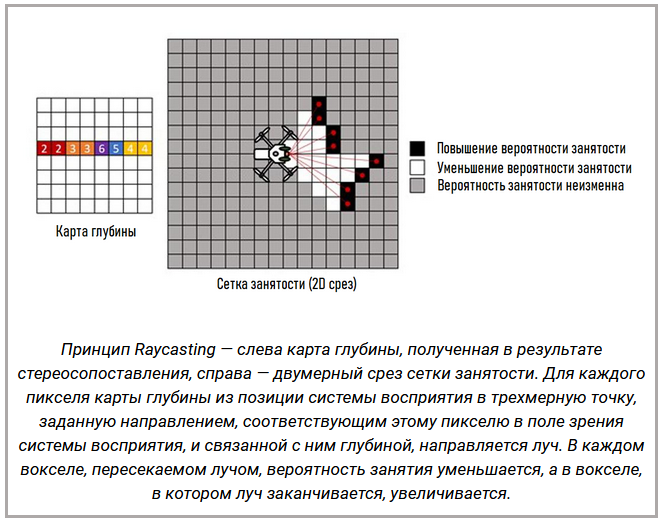
לפיכך, הרשת פועלת כמסנן זמן למידע עומק, סופג כל רעש פוטנציאלי במדידת העומק, וכזיכרון של מדידות קודמות, המאפשר לך לנווט בסביבות קשות גם בהעדר שדה ראייה רציף של 360 ° של מערכת התפיסה.
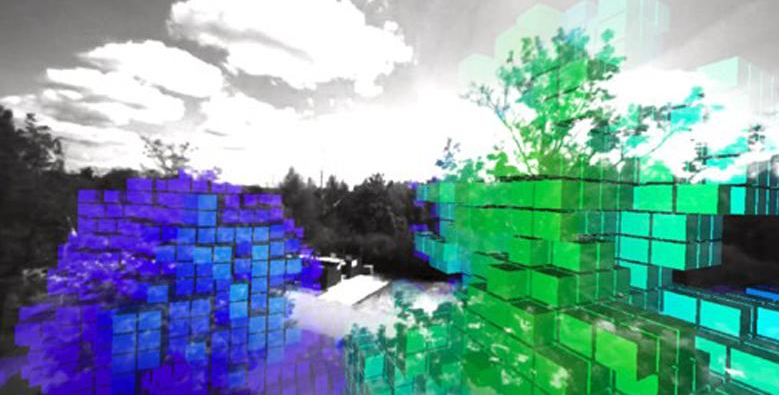 דוגמא לרשת מילוי. ווקסלים מוצבים בתצוגה הנכונה של מצלמת הסטריאו עם רמה גבוהה של ודאות שהם עסוקים, החל מאדום (קרוב) לסגול (רחוק).
דוגמא לרשת מילוי. ווקסלים מוצבים בתצוגה הנכונה של מצלמת הסטריאו עם רמה גבוהה של ודאות שהם עסוקים, החל מאדום (קרוב) לסגול (רחוק).
רשת המילוי היא הבסיס לאלגוריתמים של תכנון תנועה המשמש את ANAFI Ai לטיסה אוטונומית והימנעות ממכשולים.
הימנעות ממכשולים
הודות לידיעת הסביבה התלת -ממדית של המזל"ט המאוחסן ברשת המילוי, ANAFI Ai יכול להימנע ממכשולים. זה מספק בטיחות נוספת משמעותית למשימות אוטונומיות, אך שימושי גם לטיסה ידנית, במיוחד אם קו הראייה בין הטייס למזל"ט נפגע.
כל 30 ms ANAFI Ai מנבא מה יהיה אופק הזמן הנומינלי הקצר בעתיד. תחזית זו נובעת מהקישורים שהגיש המשתמש, בין אם מדובר בפקודות טיסה מהשלט הרחוק, נקודות ציון לצרף לתוכנית טיסה או מסלול קלט. לאחר מכן, באמצעות מודל המל"ט הפנימי המדומה, אלגוריתם התזמון מחדש מחשב את התיקונים הקטנים ביותר האפשריים למסלול הנומינלי החזוי הזה שהופך אותו ללא התנגשות וניתן לביצוע עבור המזל"ט.
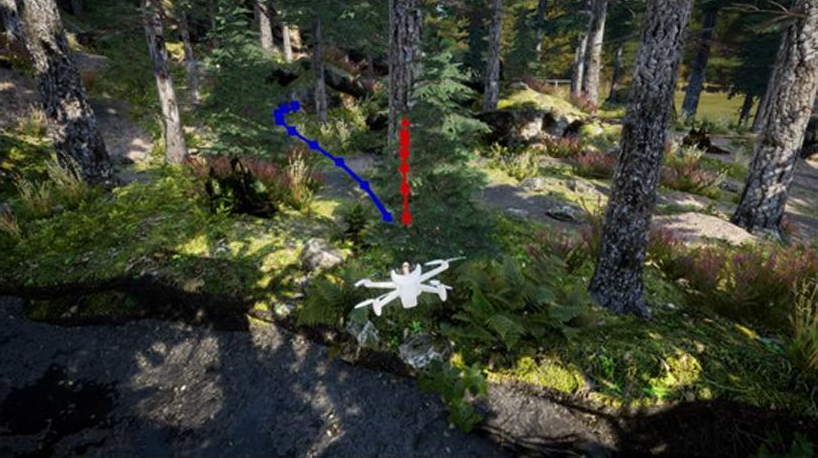 דוגמה למסלול מותאם שחושב על ידי אלגוריתם הימנעות ממכשולים בתגובה להתנגשות של מסלול ההתייחסות עם עץ.
דוגמה למסלול מותאם שחושב על ידי אלגוריתם הימנעות ממכשולים בתגובה להתנגשות של מסלול ההתייחסות עם עץ.
מערכת ההימנעות ממכשולים ANAFI Ai תוכננה לפעול במהירות של עד:
- טיסה ברמה: 29 קמ"ש
- טיפוס: 14 ק"מ / שעה
- ירידה: 11 קמ"ש
ביצועי ההימנעות מוגבלים בגשם או ברוח חזקה, באור נמוך או בניווט לוויני מופרע. בנוסף, לפני הטיסה עליך לוודא כי עדשות מערכת החישה נקיות.
משימות טיסה

תכונות עיקריות
אוויר SDK (ראה.קטע SDK) מאפשר למפתחים לגשת לכל חיישן מזל"ט, מצלמה, ממשק קישוריות ופונקציה עצמאית. לכן הם יכולים להתאים אישית את התנהגות המל"ט ליצירת משימות טיסה. כל משימת טיסה מכילה קבוצה של התנהגויות או מצבים בסיסיים:
- בשטח: התנהגות כאשר המנועים עצורים, למשל כיול חיישנים.
- המראה: אסטרטגיות שונות להמראה
- רחף: החזיקו בנקודה קבועה
- טיסה: ידנית פונקציות וטיסה אוטונומית
- נחיתה: אסטרטגיות נחיתה שונות
- קריטי: עם גילוי מצב קריטי
משימות טיסה מותאמות אישית יכולות ליצור התנהגויות חדשות או לעשות בהן שימוש חוזר ממשימת ברירת המחדל.
מחיר וזמינות
תחילת המכירות של מזל"ט ANAFI Ai מתוכננות לספטמבר 2021. מידע על המחיר לא נחשף כרגע. אנו ממשיכים לעקוב אחר המידע הנכנס ובהחלט נעדכן סעיף זה במועד מאוחר יותר.

תיעוד להורדה
תיעוד להיכרות עם המוצר מהמפתח:
סרטונים
ביקורות מובילות ANAFI Ai מהמפתח והמשתמשים
פריקה וטיסה ראשונה.
טיסת ניסוי של המזל"ט בטווח עם חיבור 4G. זמן הטיסה הכולל היה 29 דקות במהירות טיסה אופקית ממוצעת של 58 קמ"ש (16 מ ' / ש'). במהלך תקופה זו, הרחפן הצליח לעבור לאורך 27 ק"מ. כמו כן, תוכלו להבחין כי הטיסה בוצעה בתנאי רוח חזקה, שהוזהרה כל הזמן על ידי מערכת המל"טים.
.






