
- 1 Pengenalan
- 2 Pembangun mengenai mesin
- 3 Ciri
- 4 Pakej kandungan
- 5 Spesifikasi
- 5.1 Drone
- 5.2 Komunikasi
- 5.3 Sistem Navigasi
- 5.4 Skycontroller 4
- 5.5 Bateri Pintar Pesawat
- 5.6 Aplikasi
- 5.7 Kamera
- 5.8 Mod penerbangan autonomi
- 5.9 Keselamatan Siber
- 5.10 Parrot SDK
- 6 Penampilan
- 7 Komunikasi
- 7.1 4G
- 7.2 Maks. jangkauan dengan sambungan 4G
- 7.3 Wi-Fi
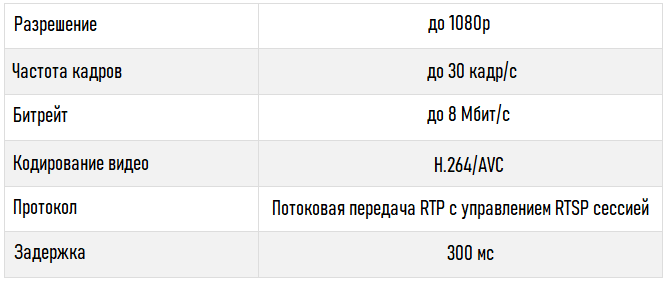
- 7.4 Video langsung
- 8 Kamera
- 8.1 Matriks 48MP
- 8.2 Lensa
- 8.3 Mod video
- 8.4 Pengekodan Video
- 8.5 HDR
- 8.6 Mod Foto
- 9 Penstabilan hibrid
- 9.1 Gimbal kamera utama
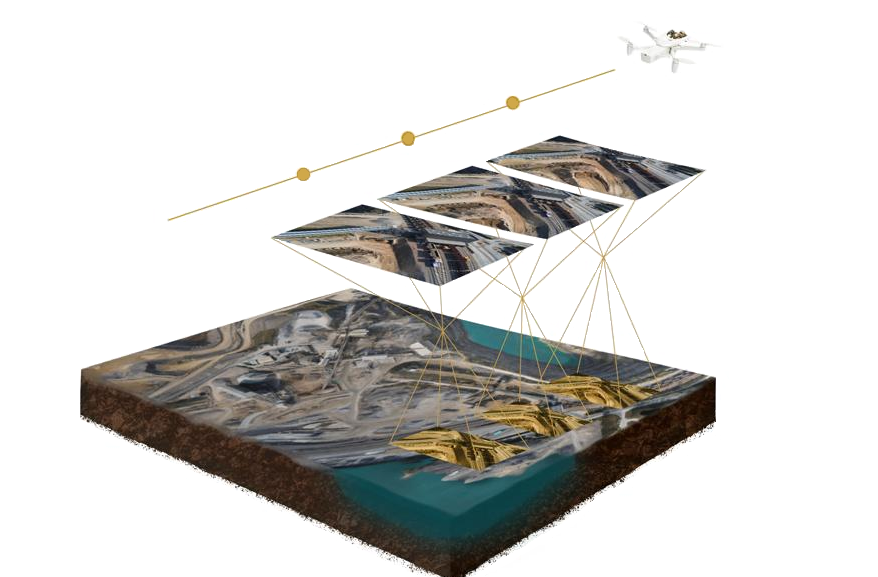
- 10 Fotogrametri
- 10.1 Pemeriksaan dan kartografi
- 10.2 Keupayaan AI dan 4G
- 10.3 Penerbangan autonomi
- 11 Fotogrametri atau lidar
- 11.1 Pro fotogrametri
- 11.2 Kekurangan LIDAR
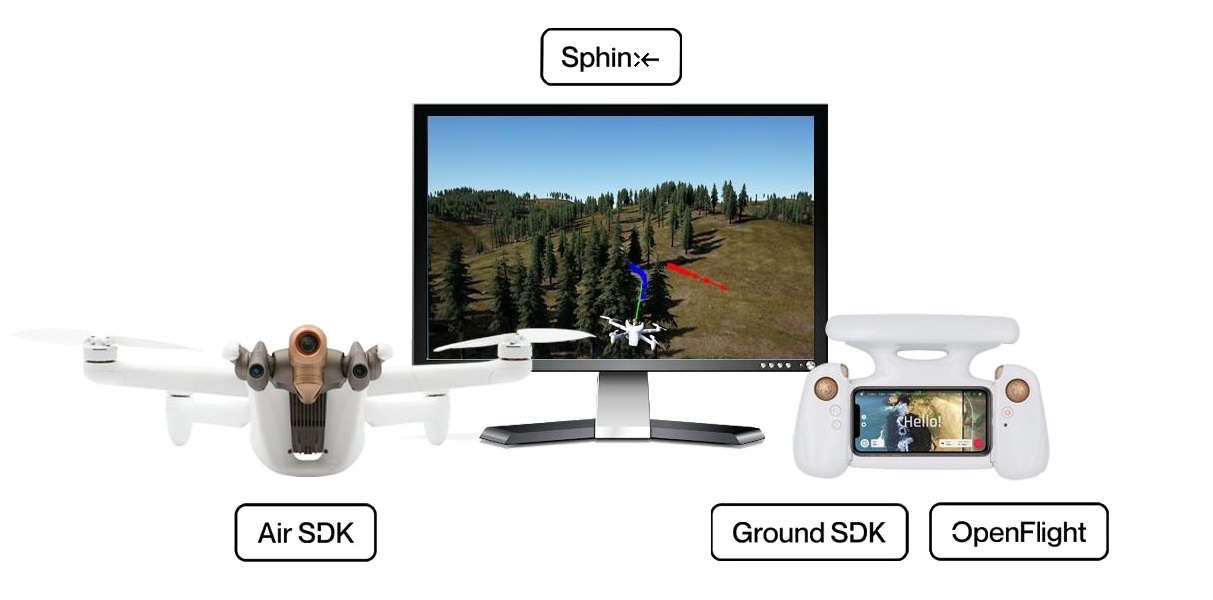
- 12 SDK
- 12.1 Air SDK
- 12.2 Ground SDK
- 12.3 OpenFlight
- 12.4 Sphinx
- 12.5 Olympe
- 12.6 PdrAW
- 12.7 Model C. A. D.
- 12.8 Keserasian MAVLink dan GUTMA
- 13 Ekosistem rakan kongsi terbesar untuk drone Parrot
- 13.1 Parrot untuk Mana-mana Keperluan Perniagaan
- 14 Keselamatan Siber
- 14.1 Privasi Data
- 14.2 Mematuhi FIPS140 -2 dan disahkan oleh CC EAL5 Secure Element
- 14.3 4G Secure Connection and Strong Authentication
- 14.4 Permulaan dan Peningkatan yang Selamat
- 14.5 Menetapkan Kunci Pengguna pada Elemen Selamat
- 14.6 Foto Bertanda Digital
- 14.7 Pemeriksaan Ketelusan dan Keselamatan Berterusan dengan pemberian Bug
- 15 Pengurusan Data
- 15.1 Data yang Dikumpulkan
- 15.2 Penggunaan Akhir Data yang Dikumpulkan [1 26]
- 15.3 Peningkatan kecerdasan buatan (AI)
- 16 Ciri-ciri penerbangan
- 16.1 Ciri-ciri aerodinamik
- 16.2 Penggerak dan aerodinamik
- 16.3 Sensor
- 16.4 Ciri-ciri sensor
- 16.5 Autopilot
- 17 Penerbangan autonomi
- 17.1 Ciri-ciri utama
- 17.2 Strategi sistem persepsi
- 17.3 Sensor
- 17.4 Suspensi berganda
- 17.5 Pembinaan semula persekitaran
- 18 Misi Penerbangan
- 18.1 Ciri-ciri Utama
- 19 Harga dan Ketersediaan
- 20 Muat turun Dokumentasi
- 21 Video
Pengenalan [16 4]
Parrot Anafi Ai adalah penyelesaian unik baru dari pemaju Perancis yang terkenalpenggunaan komersial
Kad panggilan Anafi Ai adalah modul 4G bawaan, berkat drone itu dapat menggunakan komunikasi bergerak generasi keempat sebagai saluran penghantaran data utama antara drone dan peralatan kawalan, yang sebenarnya menghapus semua sekatan pada jarak penerbangan dan menentukan operasi penglihatan luar UAV. Ke depan, kami perhatikan bahawa potensi mesin yang dinyatakan ternyata sangat kuat dan lebih dari sebelumnya sesuai dengan penampilan futuristiknya, yang diilhamkan oleh alam untuk mencipta jurutera Perancis.
Pembangun mengenai kereta
Martin Liné, pengarah pemasaran di Parrot, drone Parrot

Ciri-ciri
Ciri-ciri utama Parrot Anafi Ai:
- Berat 898 gram
- Masa terbang 60 saat
- Reka bentuk lipat mudah alih yang unik
- Modul komunikasi 4G terbina dalam untuk interaksi peralatan drone / kawalan penuh tanpa sekatan dalam semua keadaan persekitaran
- ) Sesuai dengan LTE di seluruh dunia
- Dilengkapi dengan sistem penghantaran isyarat omnidirectional (4 antena arah dengan reflektor (gain: antena 2.5 dBi / s). Drone menentukan pasangan antena terbaik bergantung pada orientasi dan kedudukannya berbanding dengan kedudukan juruterbang)
- Dilengkapi dengan sistem pengimejan omnidirectional yang unik dari dunia sekitarnya yang dibina di atas sepasang kamera stereoskopik yang dipasang pada gimbal khusus dengan jarak pan 330 darjah (-120 ° hingga 210 °), bekerja di bersama-sama dengan sistem pengoptimuman pintar. laluan penerbangan
- Diadaptasi untuk penerbangan dalaman
- Penstriman video langsung dalam 1080p dengan kependaman rendah (300 m / s) tanpa batasan jarak di mana sahaja di dunia, dengan kadar bit video 12 Mbps
- Keupayaan untuk memindahkan fail ke penyimpanan awan secara langsung dalam penerbangan
- Modul komunikasi Wi-Fi terbina dalam (Wi-Fi 802.11a / b / g / n) untuk kawalan interaksi drone / peralatan penuh (sebagai alternatif pilihan sambungan)
- Budak. Julat frekuensi Wi-Fi: 2.4GHz / 5.8GHz
- Maks. jangkauan penerbangan FPV melalui Wi-Fi: 9 km
- Mod operasi automatik unik modul 4G / Wi-Fi, yang memungkinkan, berdasarkan kesesakan rangkaian, beralih dari satu teknologi komunikasi ke yang lain tanpa kehilangan data
- drone kelas perlindungan IPX3
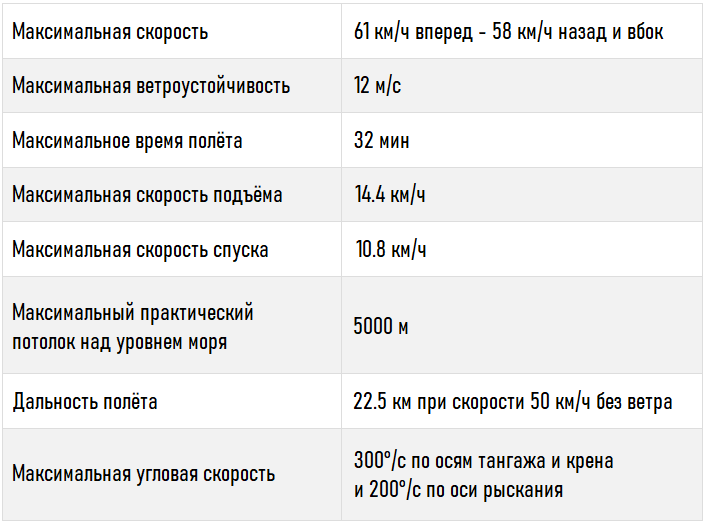
- Max. masa penerbangan 32 min
- Max. kelajuan penerbangan mendatar 61 km / j
- Maks. rintangan angin: 13 m / s
- Maks.siling di atas permukaan laut 5000 m
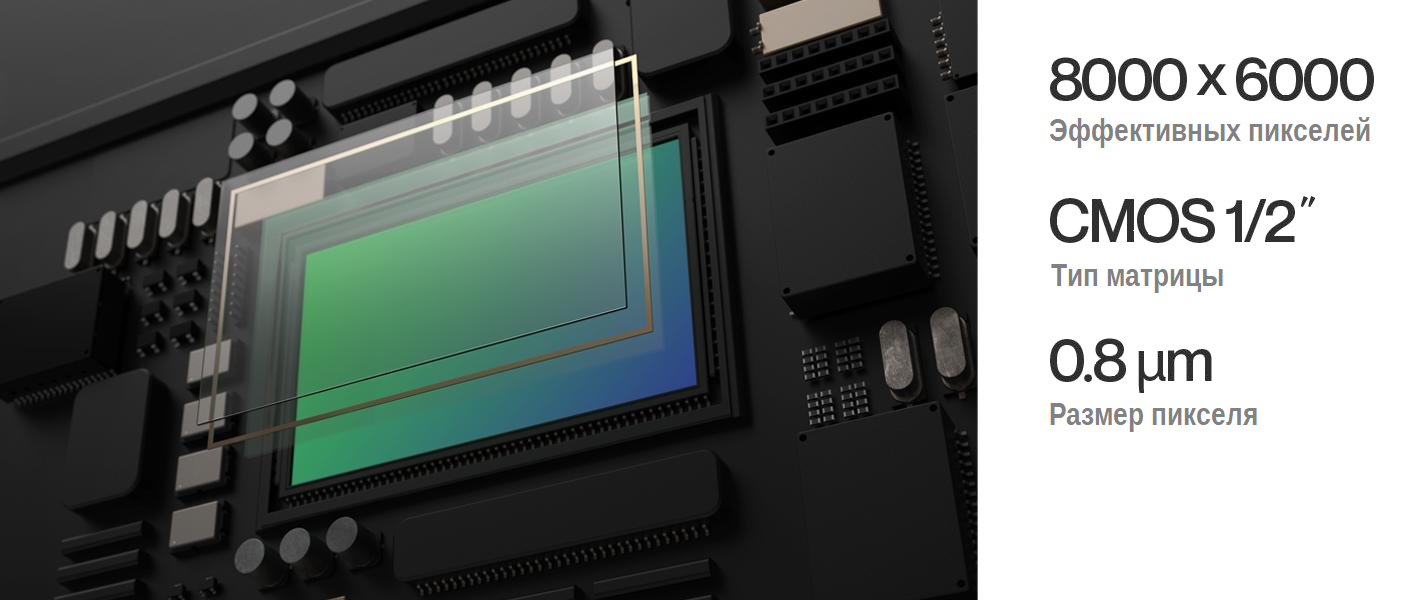
- Kamera 4K 48MP yang dibina di atas matriks CMOS 1/2 inci dengan ukuran piksel 0.8 μm; dengan susunan penapis warna Bayer terbina dalam
- Lensa LD-ASPH optik
- Sistem penstabilan imej 6 paksi hibrid (EIS digital 3-paksi mekanikal 3-paksi)
- Boleh dikawal julat operasi Gimbal -90 ° hingga 90 °
- 6x Zum Digital Tanpa Kehilangan (2x 4K / 4x FHD)
- Maks. kadar bit video 200 Mbps
- Format rakaman video HDR8 / HDR10
- Maks. julat dinamik 14EV
- Profil warna P-log untuk pasca pemprosesan
- 5 × mod penerbangan dan menembak automatik (Fotogrametri / Pelan Penerbangan / Jurukamera / RTH Pintar / Kenderaan)
- Slot terbina dalam untuk kad MicroSD dan SIM
- Sesuai dengan Suite PIX4D
- Mod penerbangan fotogrametri tersedia dalam kumpulan. Aplikasi FreeFlight 7 dan perisian OpenFlight
- Pembuatan rancangan penerbangan satu klik
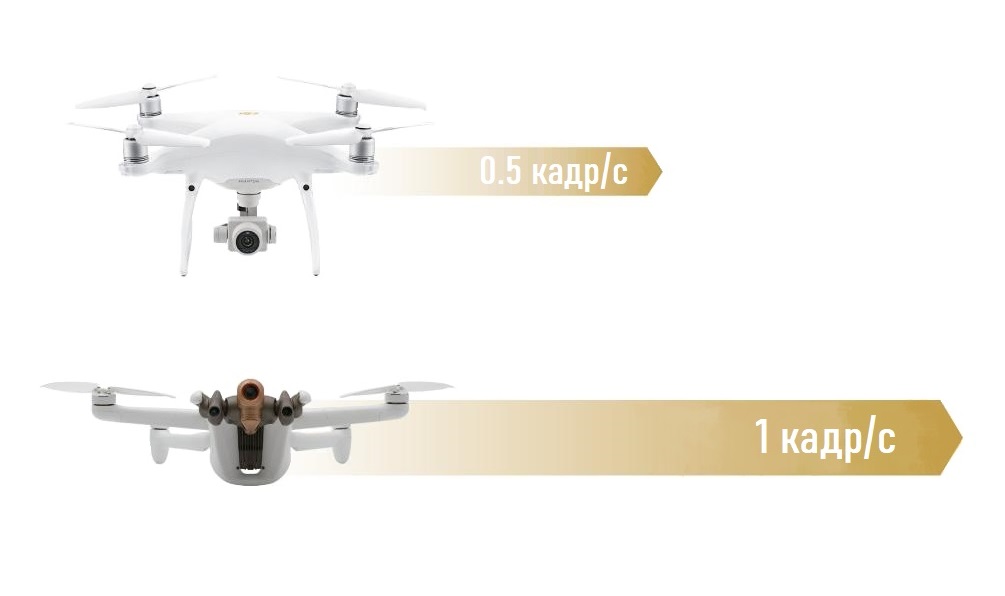
- Fotogrametri 48MP 1 fps: dua kali lebih pantas daripada pesaing
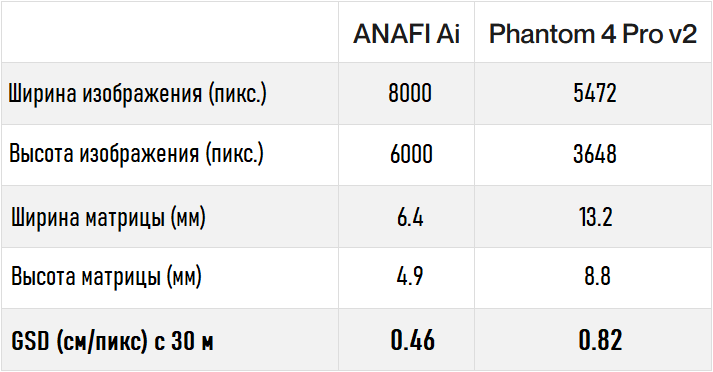
- Ketepatan pengambilan gambar: 0,46 cm / piksel. GSD pada 30m
- Sokongan Parrot SDK (dengan kemampuan memasukkan kod anda ke dalam drone menggunakan Air SDK, membuat aplikasi mudah alih menggunakan Ground SDK, mengkonfigurasi stesen darat sumber terbuka menggunakan OpenFlight, berinteraksi dengan Sphinx moden alat simulasi drone serta skrip Python dengan Olympe dan pemprosesan video dan metadata dengan PdrAW)
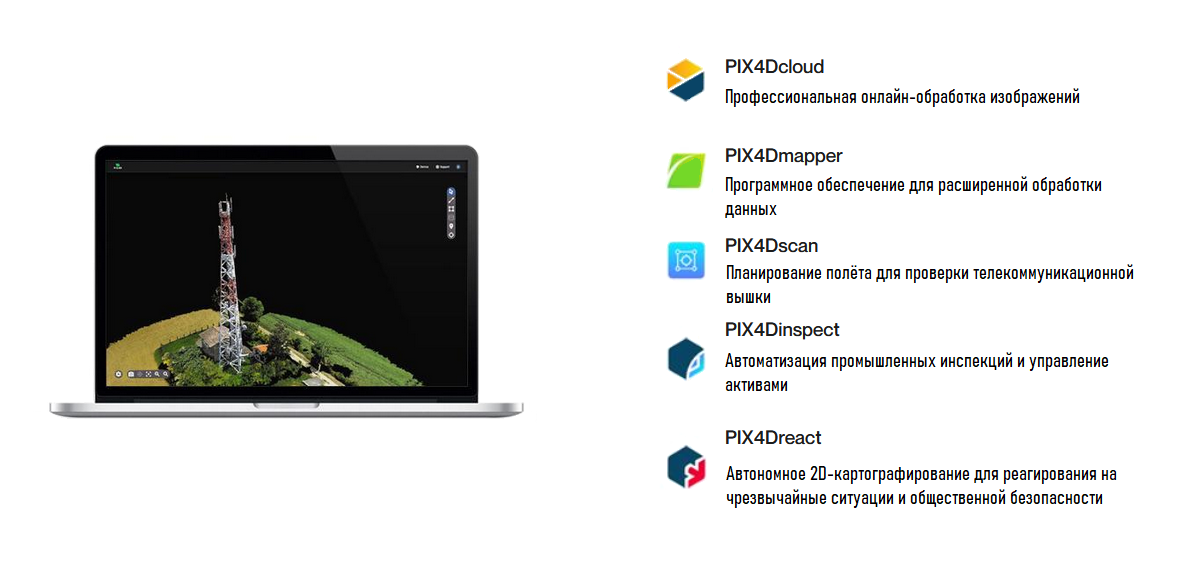
- Sesuai dengan perisian pihak ketiga: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- ANAFI Ai mematuhi Umum Peraturan Peraturan Perlindungan Data Kesatuan Eropah (GDPR)
- Privasi data yang unggul dengan NIST FIPS140-2 Tingkat 3 Elemen Selamat WISeKey dengan Kriteria Umum EAL5
- Video dan kawalan dilindungi dengan SRTP / DTLS mengikut ke webRTC
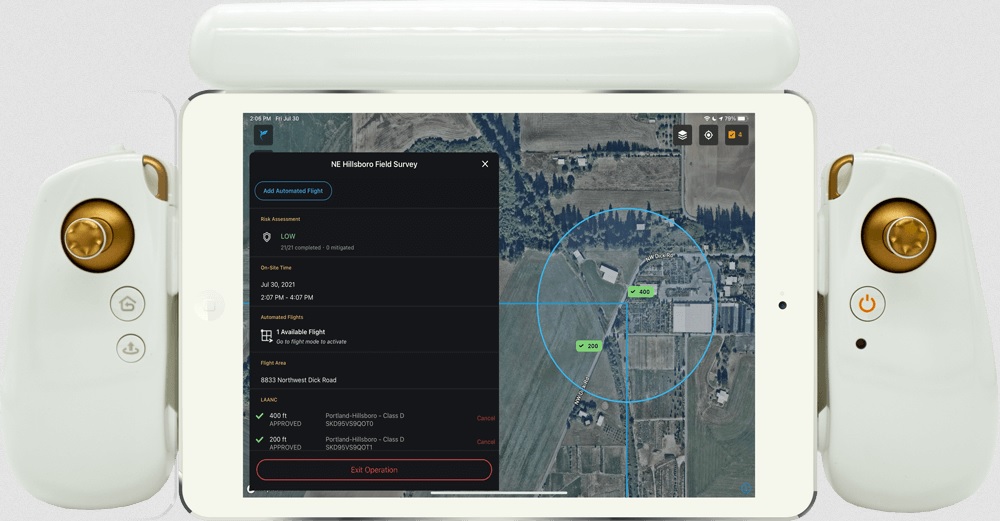
- Peralatan kawalan mudah alih Parrot Skyco baru ntroller 4
- Aplikasi mudah alih baru Parrot FreeFlight 7

Pakej
Pembangun menawarkan drone dalam konfigurasi tunggal, yang akan merangkumi:
- Drone ANAFI Ai
- Kes pengangkutan tegar
- Peralatan kawalan Parrot Skycontroller 4
- 1 × Pintar bateri
- USB-PD Charger
- Spare Propeller Kit (2CW / 2CCW)
- Companion Cable (USB-C to Lightning)
- 2 × Kabel Pendamping (USB -C ke USB-C)
- Carta Kalibrasi

Spesifikasi
) Pesawat

Komunikasi
Sistem navigasi
Skycontroller 4

Bateri Pintar Pesawat]
Aplikasi

)Kamera

) Mod penerbangan autonomi
Keselamatan Siber
Parrot SDK
Seterusnya, anda dapat membiasakan diri dengan maklumat penting dari Parrot Anafi Ai, yang akan membolehkan anda mempelajari lebih lanjut mengenai potensi mesin yang dinyatakan, serta penambahbaikan apa yang telah dilaksanakan jika dibandingkan dengan versi komersial drone Parrot Anfi Thermal dan drone lain dari jenama terkemuka.
Penampilan





Komunikasi
4G
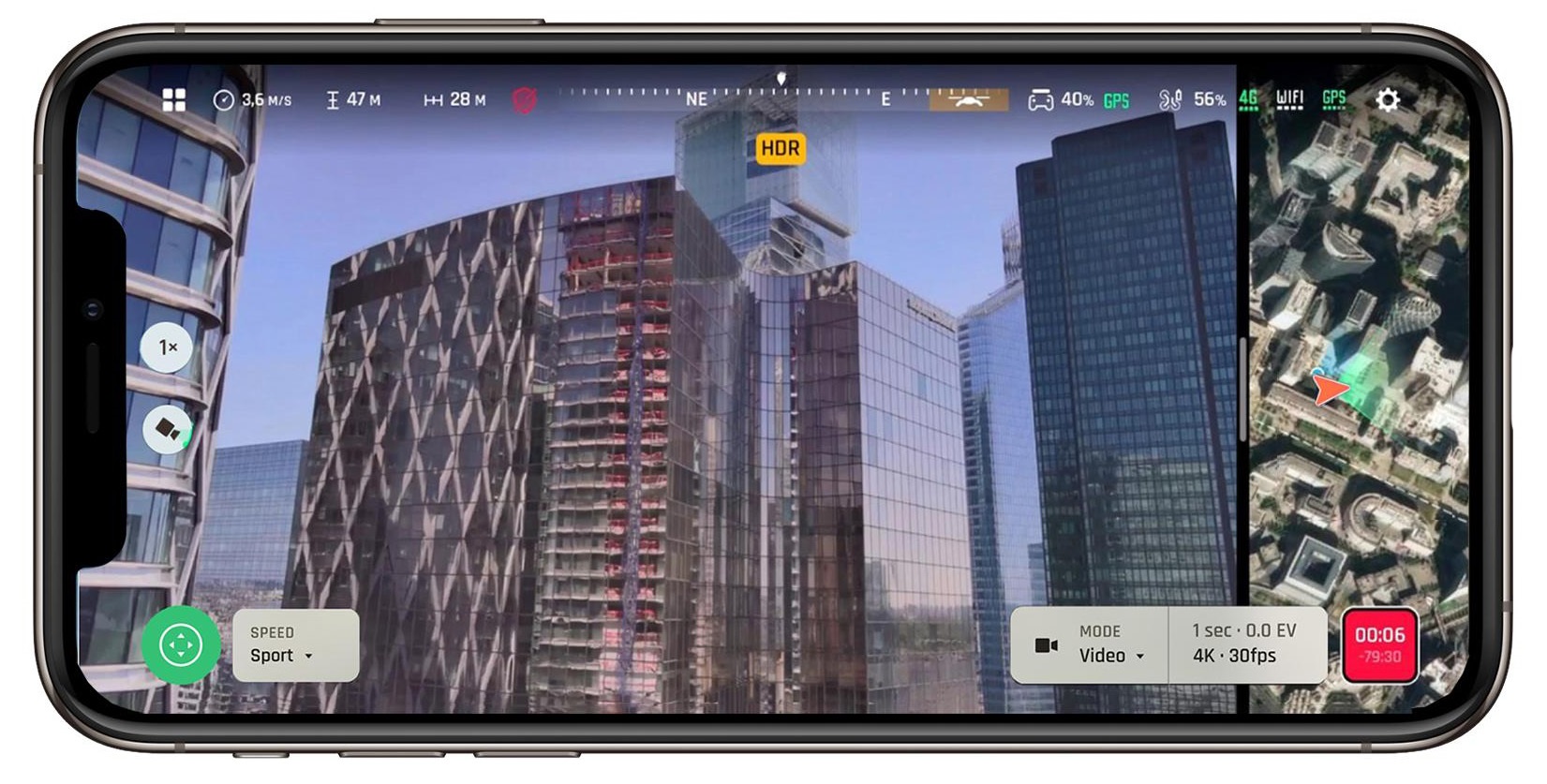
ANAFI Ai merangkumi modul radio 4G (selain modul radio Wi-Fi), yang membolehkan anda menyiarkan aliran video dalam kualiti 1080p dengan kadar bit maksimum 12 Mbps, dengan kependaman yang sangat rendah (300 ms), tanpa had dalam jarak dan di mana sahaja di dunia.
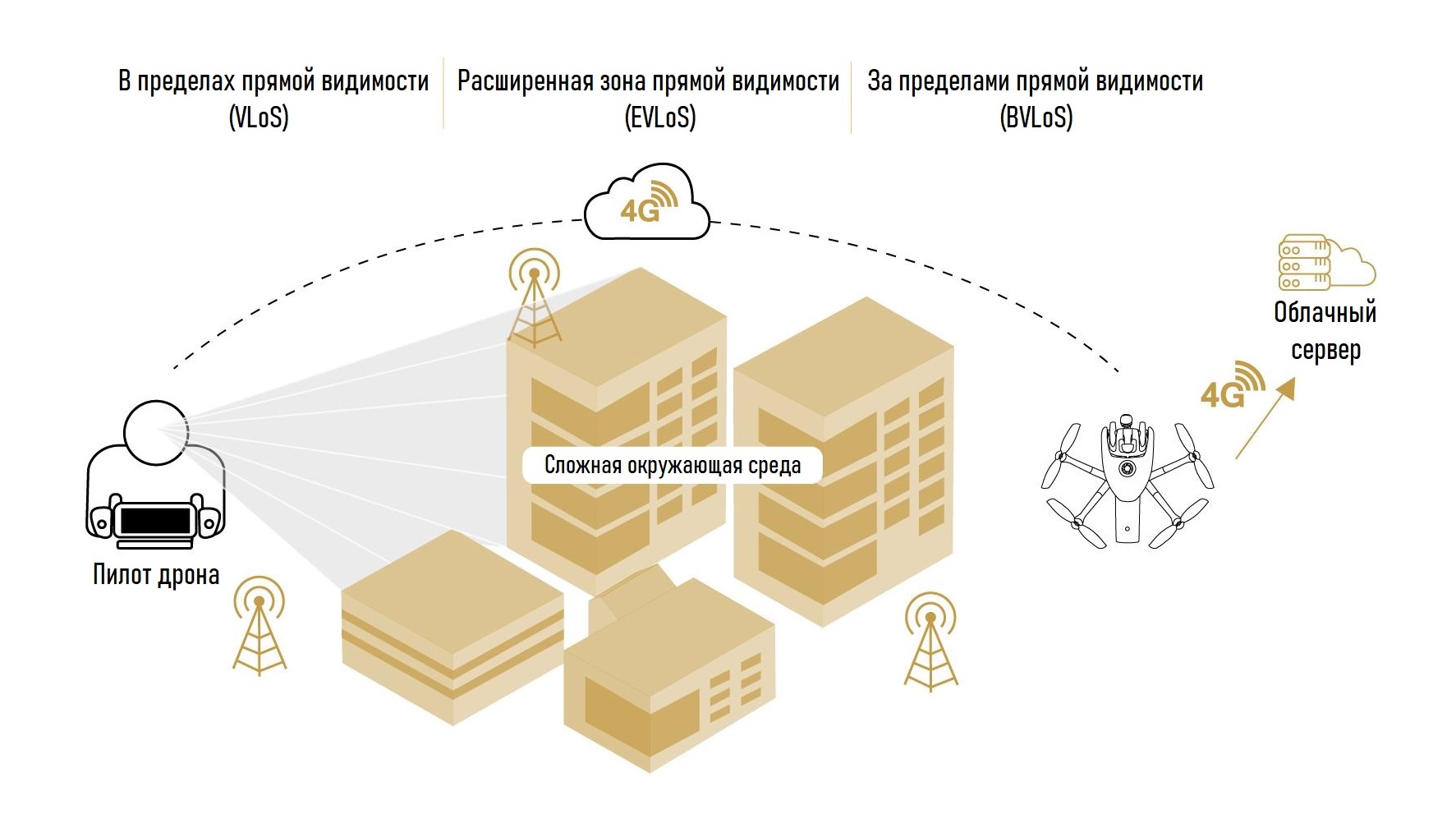
Keserasian
Modul ANAFI Ai 4G menyokong lebih daripada 28 jalur frekuensi, merangkumi lebih dari 98% frekuensi yang digunakan di seluruh dunia.
Suis Rangkaian Automatik
Kualiti dan lebar jalur rangkaian 4G dan Wi-Fi diukur setiap 100 ms untuk menyesuaikan streaming dengan keadaan rangkaian. Digabungkan dengan algoritma penghalaan, hubungan antara drone dan pengawalnya tetap terjaga walaupun Wi-Fi terganggu teruk. Oleh itu, apabila lebar jalur efektif (bandwidth boleh guna) Wi-Fi berada di bawah 1.5 Mbps, sistem secara automatik akan beralih ke 4G.
Untuk membatasi penggunaan data mudah alih ketika juruterbang berada dalam jangkauan jaringan Wi-Fi drone, peralihan dari 4G ke Wi-Fi juga dilakukan secara automatik tanpa memotong aliran video.
Maks. jangkauan dengan sambungan 4G
Video dari pembangun menunjukkan maksimum jangkauan penerbangan Anafi Ai dengan sambungan 4G dalam satu arah pada satu cas bateri. Jumlah masa penerbangan adalah 29 minit dengan kelajuan penerbangan mendatar rata-rata 58 km / jam (16 m / s). Selama ini, drone mampu menempuh jarak 27 km. Anda juga dapat melihat bahawa penerbangan itu dilakukan dalam keadaan angin kencang, yang selalu diperingatkan oleh sistem drone.
Algoritma pengoptimuman aliran video yang dilaksanakan
4G kawalan kesesakan
Algoritma kawalan kesesakan membolehkan:
- Mengukur kehilangan paket sepanjang keseluruhan rangkaian rangkaian.
- Ukur kelewatan (waktu perjalanan pergi balik).
- Laraskan lebar jalur mengikut dua parameter ini.
Matlamat utama algoritma adalah untuk memaksimumkan lebar jalur yang tersedia sambil mengekalkan kependaman serendah mungkin. Algoritma ini dilaksanakan pada setiap antara muka yang terdapat dalam drone, masing-masing dengan parameternya sendiri, dioptimumkan mengikut rangkaian. Berdasarkan maklumat yang diberikan oleh algoritma ini, pengurus pautan membuat keputusan penghalaan dan antara muka aktif.
Mengendalikan drone melalui sambungan 4G
ANAFI Ai menyambung ke alat kawalan jauh melalui 4G dalam masa kurang dari 30 saat jika drone berada di luar jangkauan Wi-Fi, dan dalam waktu kurang dari 15 saat jika drone berada dalam jangkauan Wi-Fi. Sambungan 4G juga menyediakan:
- Pengesanan dan permulaan sambungan berdasarkan protokol VOIP SIP.
- Gunakan pelayan geganti untuk membuat sambungan melalui rangkaian selamat.
Prestasi aliran video
- Latensi: 300 ms.
- Keselamatan: video dan kawalan dilindungi dengan SRTP / DTLS menurut webRTC.
- Antena: 28 jalur LTE dari 700 MHz hingga 2.6 GHz.

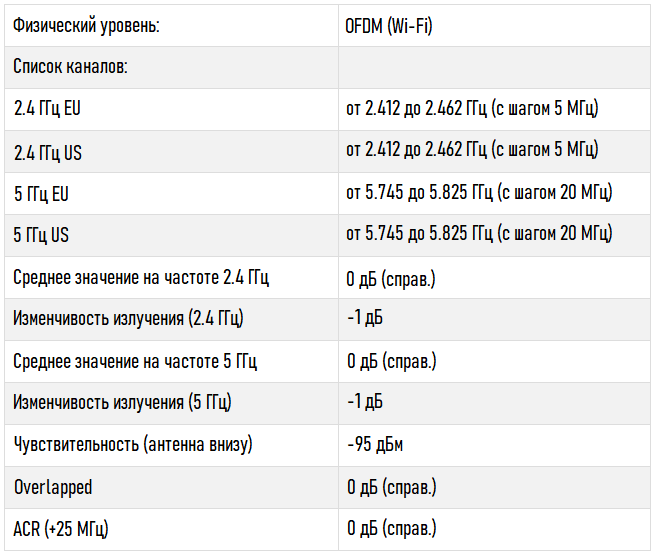
Wi-Fi
Sistem penghantaran omni-arah
- ANAFI Ai mempunyai 4 antena reflektor arah (dengan keuntungan antena: 2.5 dBi / s). Drone menentukan pasangan antena terbaik berdasarkan orientasi dan kedudukannya berbanding kedudukan juruterbang.
- Dengan keuntungan gabungan 3.5 / - 1.5 dBi dalam satah mendatar drone, keuntungan ANAFI Ai RF sangat seragam.
- Sinaran antena hilir telah diperbaiki sebanyak 4 dB berbanding ANAFI.
Reka bentuk luaran radio berkuasa tinggi
Bahagian depan radio memaksimumkan daya di dasar antena dengan garis linier yang sangat baik dan kepekaan (-94 dBm pada 6.5 Mbps) untuk mencapai daya had FCC maksimum.

Kebolehpercayaan Wi-Fi
802.11 parameter
lebar jalur rendah, kependaman rendah, kebolehubahan tahap penerimaan kerana kelajuan drone, jarak jauh, adanya gangguan. Parameter ini merangkumi agregasi, kiraan semula, teknologi MiMo (STBC), kadar data bingkai kawalan, dan keadaan putus hubungan.
Pencegahan Gangguan Cerdas
ANAFI Ai mempunyai algoritma untuk penghapusan saluran (jalur dwi 2.4 GHz dan 5 GHz) sekiranya berlaku gangguan.
Adaptasi dan pemantauan aliran
ANAFI Ai terus memantau status pautan 4 Hz dan dapat mengesan gangguan. Ini membolehkan anda mengoptimumkan lebar jalur dan ukuran paket yang dihantar secara dinamik. Ia juga memberi amaran kepada juruterbang jika dia berada dalam lingkungan kemacetan atau akan kehilangan isyarat.
Pengurangan lebar jalur
Pada had jangkauannya dan jika keadaan mengizinkannya, ANAFI Ai dapat beralih ke lebar jalur 10 MHz untuk meningkatkan kepekaannya sebanyak 3 dB dan meningkatkan julat sebanyak 40%.

Petunjuk radio
Siaran video
Petunjuk pautan video
Algoritma pengoptimuman aliran video yang dilaksanakan
Streaming Gen4 Parrot (generasi ke-4)
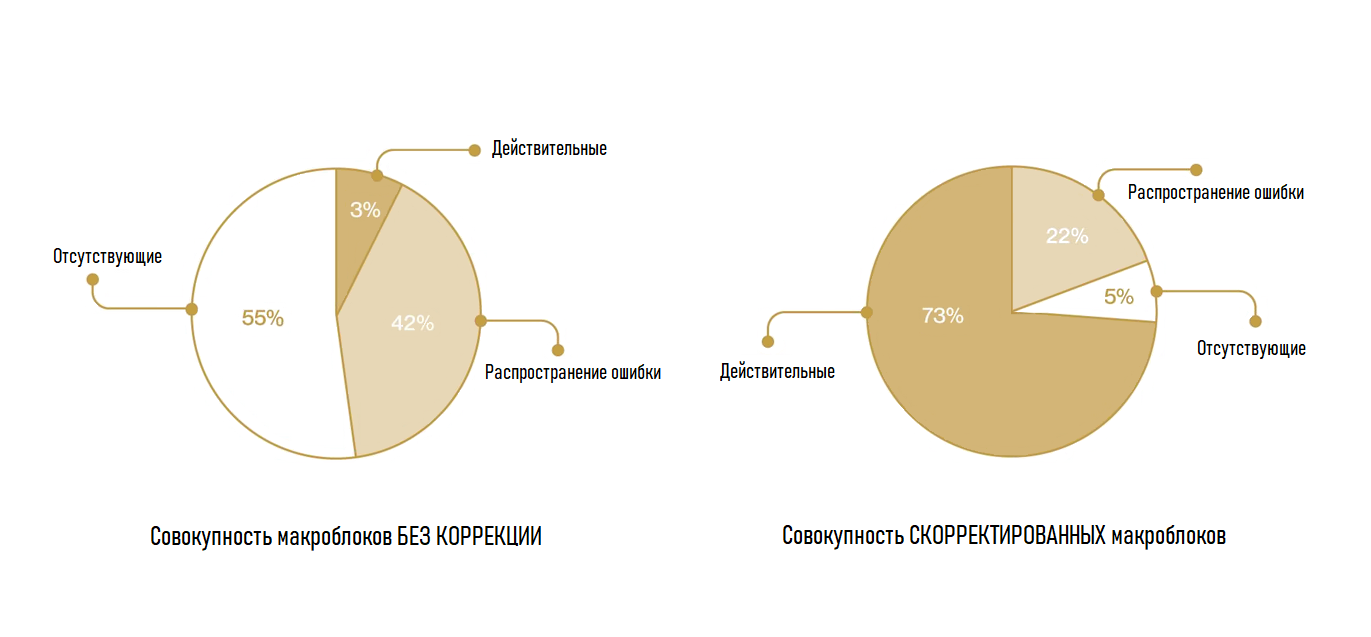
Algoritma ini mengurangkan kesan visual dari kehilangan rangkaian dan memberikan interoperabiliti semua penyahkod, sambil menyediakan aliran lengkap secara sintaksis: bahagian gambar yang hilang dibina semula sebagai bahagian yang hilang, sama dengan yang terdapat dalam gambar rujukan.
Oleh itu, kesalahan terdapat di kawasan yang rentan terhadap kerugian, dan tidak berlaku pada keseluruhan gambar.
Grafik di bawah menunjukkan kadar kejayaan penyahkodan makroblock pada kehilangan rangkaian 5% - dengan dan tanpa ciri penstriman ANAFI Ai yang dipertingkatkan. Algoritma memastikan penyahkodan betul 75% dari makroblock. Mereka membenarkan pengguna meneruskan misi tanpa membekukan skrin atau kehilangan streaming.
Kawalan Kesesakan
Algoritma juga menilai persekitaran Wi-Fi dan radio untuk menjangkakan dan mengelakkan kehilangan paket dan kesesakan rangkaian, yang membantu mengurangkan kependaman. Algoritma berdasarkan anggaran kapasiti saluran, dikira berdasarkan kadar data dan kadar ralat pada lapisan fizikal; maka ia mempengaruhi parameter pengekodan dan enkapsulasi rangkaian.
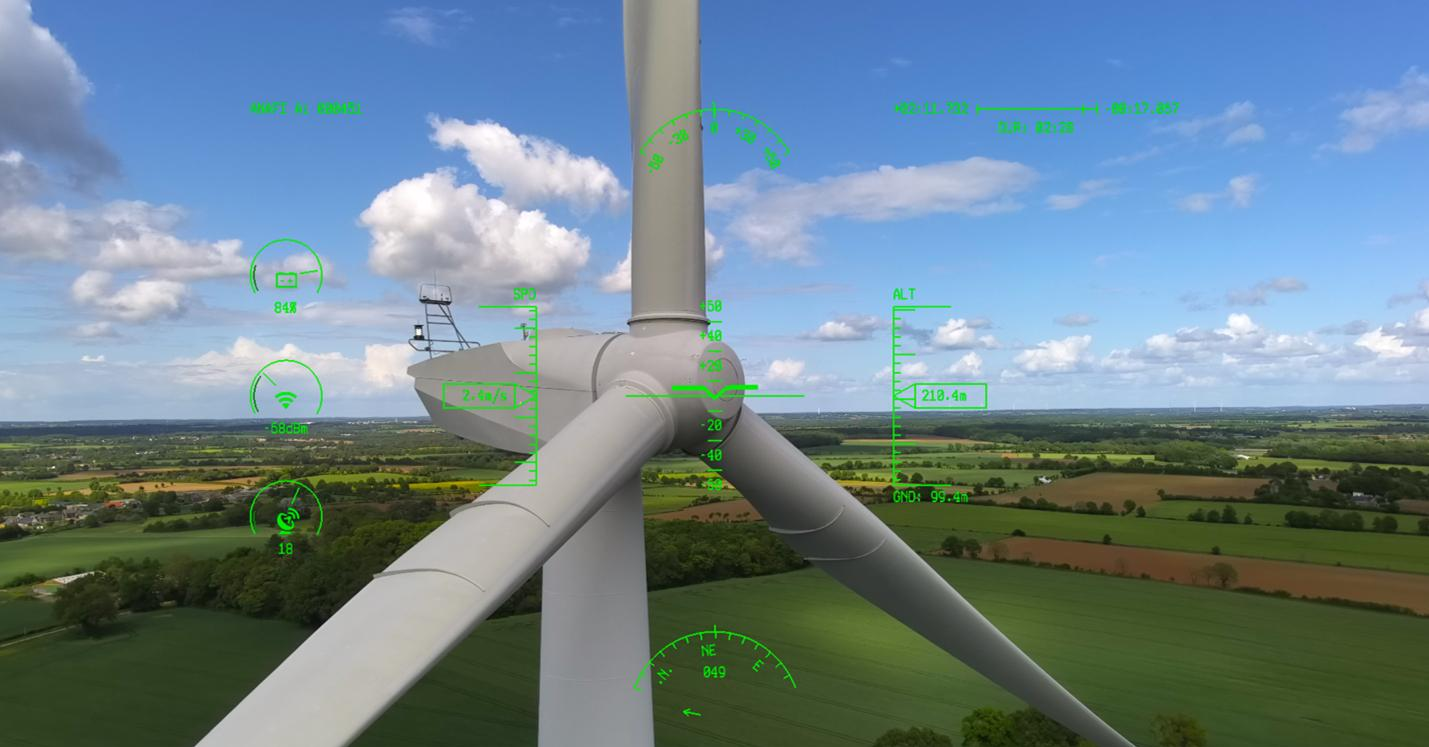
Metadata
Metadata dihantar dengan aliran video. Secara khusus, ia mengandungi elemen telemetri drone (kedudukan, ketinggian, kelajuan, tahap bateri, dll.) Dan metrik video (sudut kamera, nilai pendedahan, bidang pandangan, dll.).
Penyegerakan gambar dan metadata terbuka melakukan fungsi penentuan kedudukan yang tepat di peta, mengesan instrumen penerbangan dalam HUD, atau mengaktifkan unsur-unsur augmented reality.
Metadata disertakan menggunakan kaedah standard (pelanjutan tajuk RTP); format data yang ditentukan oleh Parrot adalah sumber terbuka: ia tersedia di ANAFI Ai SDK.
Kamera

Sensor 48MP
Matriks ANAFI Ai merangkumi sebilangan besar megapiksel untuk fotografi udara terperinci.
Ini menggunakan teknologi array penapis warna Quad Bayer, di mana kumpulan 4 piksel bersebelahan memiliki warna yang sama. Oleh itu, tangkapan HDR masa nyata dapat diperoleh dalam mod foto dan video dengan menambahkan isyarat dari empat piksel bersebelahan.
Julat dinamiknya adalah 4 kali daripada matriks Bayer standard. Malah adegan yang kompleks dapat difilemkan dengan penyorotan minimum atau kehilangan detail bayangan.
Lensa
Lensa ANAFI Ai telah dikembangkan khas untuk Parrot. Ia menggabungkan 6 elemen aspherical dan dioptimumkan untuk mengurangkan suar optik. Lensa ini memberikan 68 ° HFoV dalam mod video standard dan 64.6 ° HFoV dalam mod foto standard.

Mod video
ANAFI Ai merakam video 4K yang lancar pada 60 bingkai sesaat, termasuk P-Log, dan juga HDR10 4K video sehingga 30fps. Jadual di bawah menyenaraikan semua mod video ANAFI Ai.

Pengekodan video
Pengguna boleh memilih antara H.264 (AVC) dan H.265 (HEVC).
Semua resolusi menggunakan format piksel berikut:
- YUV420p (ruang warna 8-bpc BT.709) untuk mod standard dan HDR8.
- YUVJ420p (8 bit / komponen, julat penuh - ruang warna BT.709) untuk gaya P-log.
- YUV420p10 (ruang warna 10bpc BT.2020) untuk rakaman HDR10, H.265 sahaja.
HDR
Semasa merakam video dalam HDR8 dan HDR10, ANAFI Ai merangkumi julat dinamik 14EV. Format HDR10 menawarkan kecerahan maksimum 1000 nits dan kedalaman warna 10 bit. Ini menyediakan gamut satu bilion warna berbanding 16 juta untuk julat dinamik standard. Berbanding dengan HDR8, HDR10 menghasilkan gambar lebih daripada dua kali lebih terang dengan peningkatan kontras yang sepadan. HDR8 dapat ditampilkan pada layar standar apa pun, sementara HDR10 untuk layar TV dan HDR10.
Mod Foto
Huraian Mod
Bahagian Kawalan Mod mengandungi tetapan yang mempengaruhi jumlah tangkapan yang diambil setiap kali rana dilepaskan..
Mod tangkapan tunggal
Mod tangkapan tunggal standard. Selepas setiap pelepasan rana, gambar yang diambil segera diproses oleh sistem.
Mod bracketing
Pengguna dapat merakam rangkaian 3, 5, atau 7 bingkai dengan pendedahan yang berbeza untuk setiap bingkai. Pratetap berikut tersedia:
- [-1 EV, 0, 1 EV] (tetapan lalai)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

Mod Burst
Mod burst akan membolehkan pengguna mengambil 10 bingkai dalam 1 saat.
Mod panorama
Mod panorama merangkumi empat tangkapan panorama yang berbeza:
- Sfera (360 °) adalah mod panorama merangkumi tiga pilihan untuk menembak panorama sfera: Sphere / Little Planet / Terowong.
- Horizontal (180 °)
- Vertical (109 °)
- Superwide - super baru mod jahitan gambar 9 lebar (HFOV 110 °, panorama lurus)
Untuk perincian mengenai spesifikasi mod panorama, lihat jadual di bawah:

Mod Timelapse
Mod ini membolehkan anda mengambil gambar pada selang waktu tetap berikut:
- 48MP: 1, 2, 4, 10, 30 atau 60 saat.
- 12MP: 0.5, 1, 2, 4, 10, 30 atau 60 saat.
Mod Selang GPS
Mod foto ini dikembangkan untuk pemeriksaan dan fotogrametri. Ia membolehkan anda mengambil gambar pada selang jarak tetap berikut: 5, 10, 20, 50, 100 atau 200 meter.
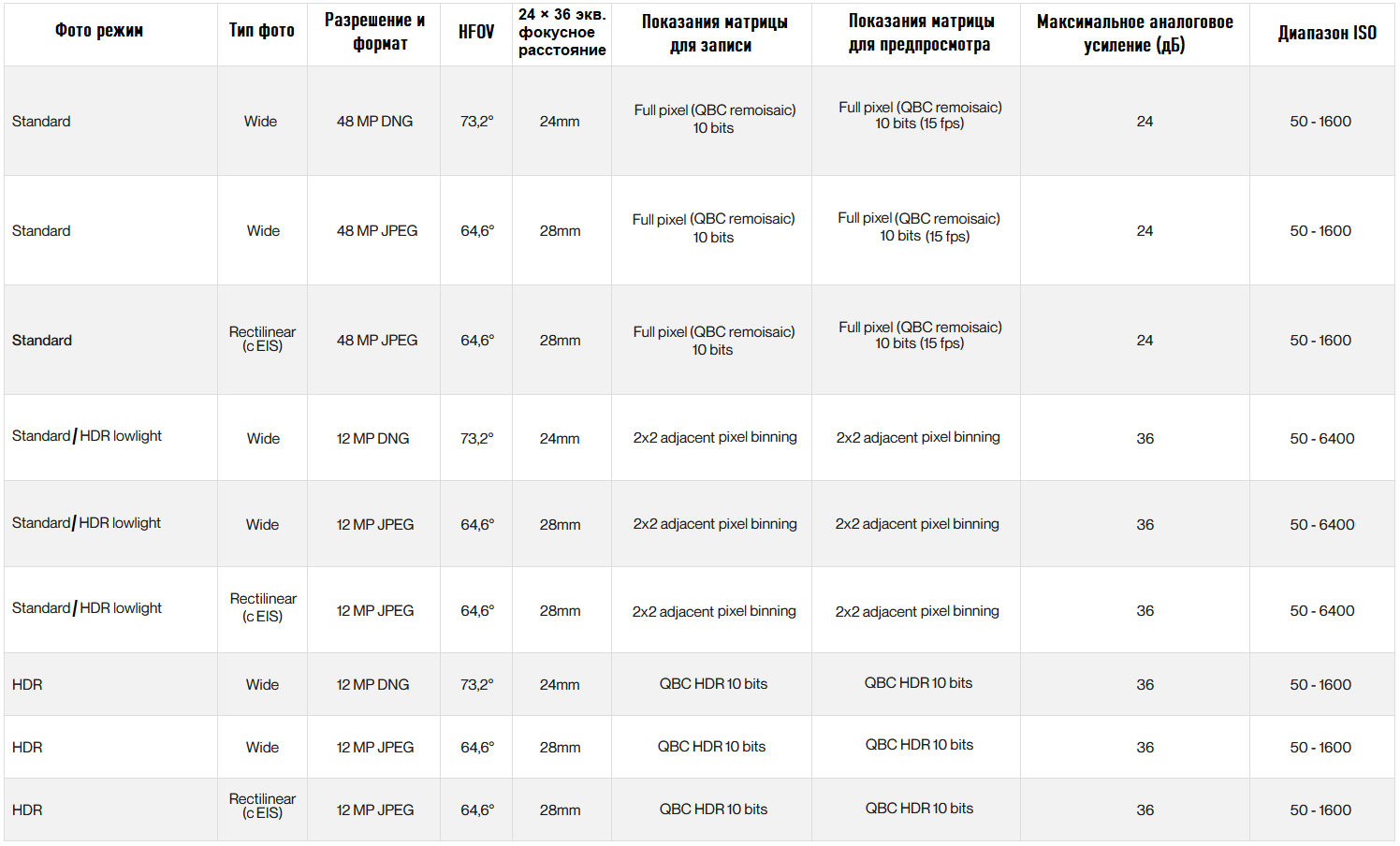
Jadual di bawah menunjukkan mod dan resolusi pengambilan gambar pegun, termasuk mod Pembacaan Sensor:
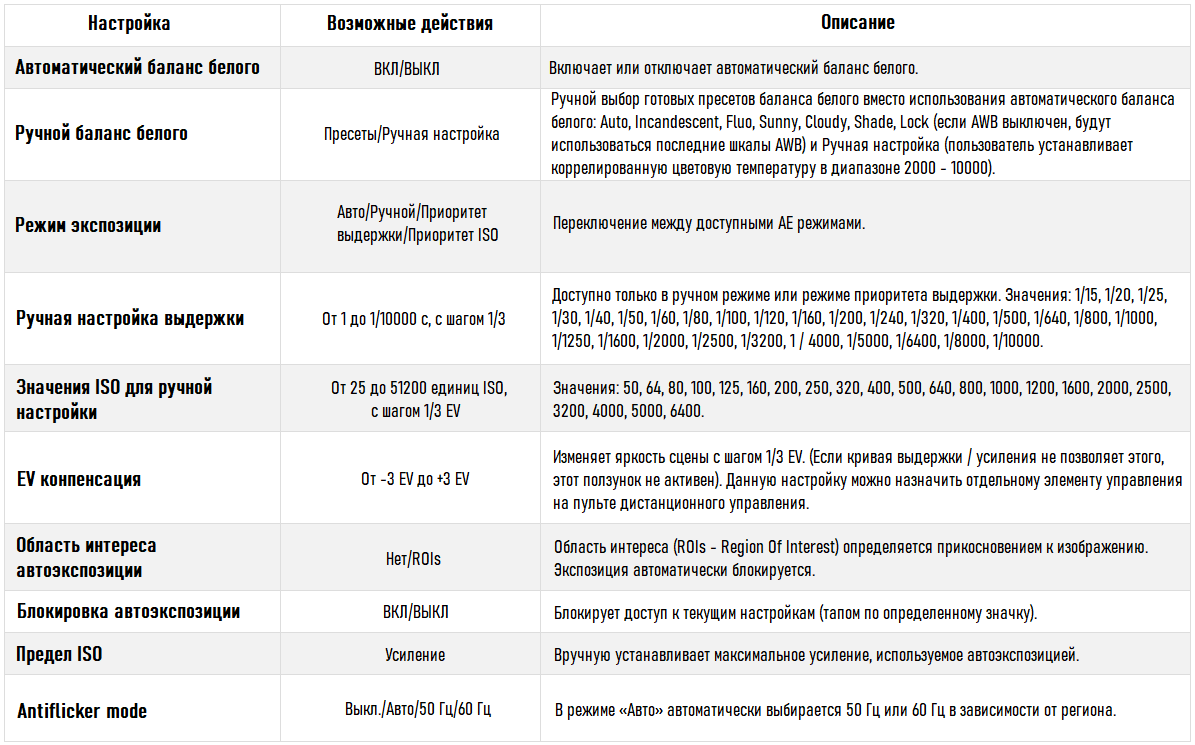
Tetapan
Berikut ini jadual menunjukkan tetapan yang tersedia untuk setiap mod.
Zum 6x
Zum tersedia dalam semua mod foto dan video. Digabungkan dengan sensor 48 megapiksel, algoritma penajaman tepat menghasilkan gambar definisi tinggi walaupun menggunakan zoom digital 6x. Pengguna ANAFI Ai kini dapat melihat perincian 1cm dari jarak 75m. Kiraan piksel yang tinggi juga membolehkan video 4K dipangkas hingga 1080p tanpa kehilangan kualiti.

Penstabilan hibrid
ANAFI Ai mempunyai penstabilan yang paling tepat di pasaran UAV mikro.
Ia menggabungkan penstabilan gabungan:
- mekanik 3 paksi (mech 3 paksi. Gimbal)
- Paksi 3 elektronik (EIS)
Penstabilan mekanikal menstabilkan paksi penunjuk kamera tanpa mengira kedudukan penerbangan drone. Penstabilan gambar elektronik membetulkan kesan getaran mikro untuk frekuensi melebihi 100 Hz, yang tidak dapat ditangani oleh pemacu mekanikal.
Gimbal kamera utama
Penstabilan mekanikal membolehkan anda menstabilkan dan mengorientasikan paksi mendatar pandangan kamera dalam ketiga-tiga paksi.
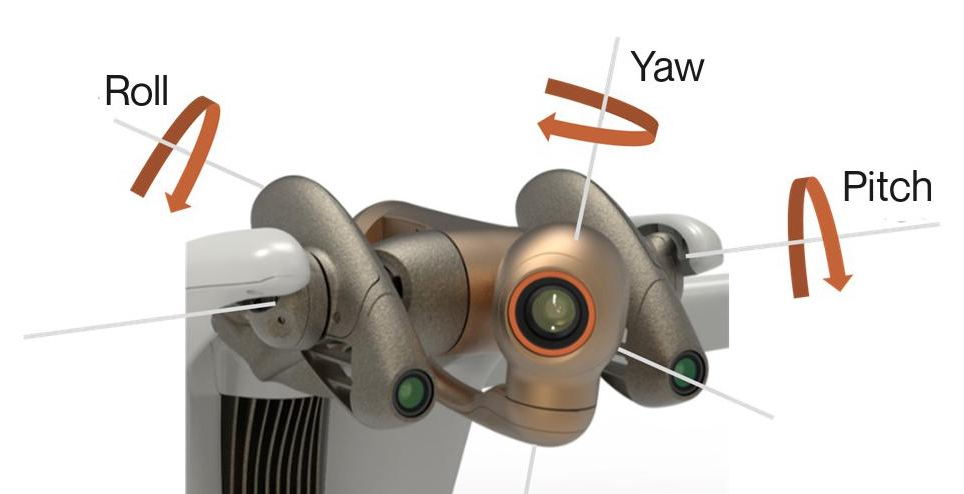 3 paksi putaran mech. penggantungan kamera utama ANAFI Ai.
3 paksi putaran mech. penggantungan kamera utama ANAFI Ai.
Ciri Utama
- Gimbal Mekanikal 3 Paksi untuk Kamera Utama
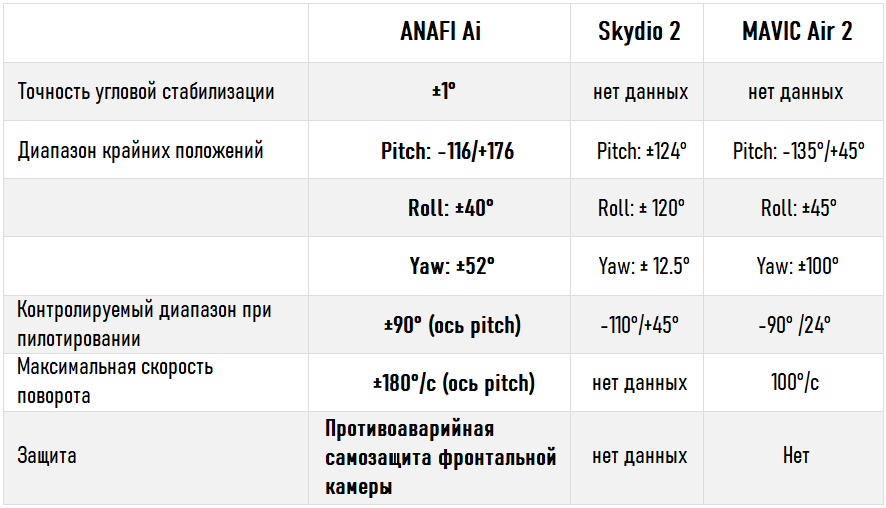
- Offset Vertikal 292 °, Medan Pandangan -116 ° hingga 176 °
Prestasi Gimbal
- Algoritma EIS membetulkan kesan goyangan dan herotan lensa sudut lebar dan juga melakukan imej digital 3 paksi penstabilan (Roll, Pitch dan Yaw).
- Kaedah terdiri dalam menerapkan transformasi geometri gambar. Transformasi geometri dikaitkan dengan cap waktu dan kedudukan tepat berkat IMU.
- Transformasi geometri diterapkan pada setiap gambar mengikut distorsi optik, getaran dan pergerakan unit kamera yang diukur.
Julat pangsi 292 °
Kamera mempunyai julat pangsi mendatar -116 ° / 176 ° di sekitar sumbu nada, sehingga memberikan pemerhatian di atas dan di bawah drone, yang merupakan peluang unik di pasaran mikro-UAV.
![]()
Fotogrametri
Fotografi udara dengan kenderaan udara tanpa pemandu mengubah cara pakar melakukan pemeriksaan dan tinjauan. Kaedah fotogrametri digunakan untuk memproses gambar yang dikumpulkan oleh UAV untuk membuat model 2D dan 3D, yang kemudian memungkinkan pelanggan menjadualkan penyelenggaraan objek yang disurvei tepat pada masanya.
4G memberikan kebolehpercayaan pautan data drone yang belum pernah terjadi sebelumnya. Pengguna boleh mengendalikan UAV di kawasan yang luas, berhampiran struktur logam, bangunan, tanpa rasa takut kehilangan komunikasi.
Pemeriksaan dan Pemetaan
Dengan menggabungkan AI drone ANAFI Ai dengan platform dalam talian PIX4Dinspect, pengguna akan dapat melakukan pemeriksaan lebih cepat dan cekap daripada sebelumnya. atau. Algoritma pembelajaran mesin mengenal antena pada menara sel, menentukan ukuran, ketinggian, kecondongan, azimut, dan menegak.
Klik pada gambar di bawah untuk melihat model 3D demo yang dihasilkan oleh ANAFI Ai.
Contoh # 1

Contoh # 2
Matriks terbaik dalam kelas
Kamera drone ANAFI Ai dilengkapi dengan sensor CMOS 48MP 1/2 inci yang dibina menggunakan teknologi penapis warna Quad Bayer, yang lebih sesuai daripada sebelumnya untuk pemeriksaan dan fotogrametri. Matriks yang digunakan membolehkan anda mendapatkan gambar terperinci dengan julat dinamik yang luas.
Foto Resolusi Tinggi
ANAFI Ai mampu menghasilkan gambar pegun 48 megapiksel, sehingga dapat menangkap semua butiran dalam resolusi tinggi dan membuat awan titik berkepadatan tinggi.
Ketajaman Penting
Misi pemeriksaan memerlukan kemampuan untuk mengenal pasti perincian minit seperti nombor siri, penyambung, noda karat, dan retakan awal.
Julat dinamik lebar
10 berhenti julat dinamik dalam mod standard, 14 berhenti dalam mod HDR. Penggredan imej yang optimum adalah mustahak untuk mewujudkan titik awan yang konsisten dan pembinaan semula 2D atau 3D berkualiti tinggi.
55% lebih terperinci daripada sensor 1-inci
Sensor Quad Bayer 48MP 1/2-inci drone ANAFI Ai lebih tajam daripada sensor 1-inci 20MP yang digunakan dalam sejumlah drone profesional moden. Gambar berikut dari pemeriksaan bumbung ANAFI Ai dan DJI Phantom 4 Pro V2.0 pada ketinggian yang sama jelas menunjukkan fakta ini.

Sesuai untuk pemeriksaan
ANAFI Ai gimbal merangkumi sistem penstabilan hibrid (elektronik mekanikal) 6 paksi yang mengimbangi turun naik penerbangan dan memastikan ketajaman gambar. Kamera ANAFI Ai mempunyai jarak yang dapat disesuaikan dari -90 ° hingga 90 °, menjadikannya alat udara yang ideal untuk melihat bahagian bawah pangkalan jambatan.
Kemiringan terkawal ± 90 °
Ketepatan
ANAFI Ai membolehkan pengguna mencapai GSD 0.46 cm / px dari ketinggian 30 m, yang bermaksud ukuran ketepatan relatif hingga 0,92 cm.
Sebagai perbandingan, pada ketinggian yang sama DJI Phantom 4 Pro V2 memberikan GSD hanya 0.82 cm / px. Dengan kata lain, ANAFI Ai dapat memetakan sasaran yang sama, terbang lebih dari 1.5 kali lebih tinggi daripada Phantom, dengan tahap perincian yang setara.
Keupayaan AI dan 4G
Satu aplikasi. Apa-apa Pelan Penerbangan
Potensi aplikasi mudah alih FreeFlight 7 membolehkan pengguna melancarkan semua misi tinjauan, pemeriksaan dan fotogrametri.

Mod penerbangan fotogrametri yang tersedia
Mod penerbangan fotogrametri berikut kini tersedia dalam aplikasi mudah alih FreeFlight 7:
- Kotak
- Kisi dua
- С bulat
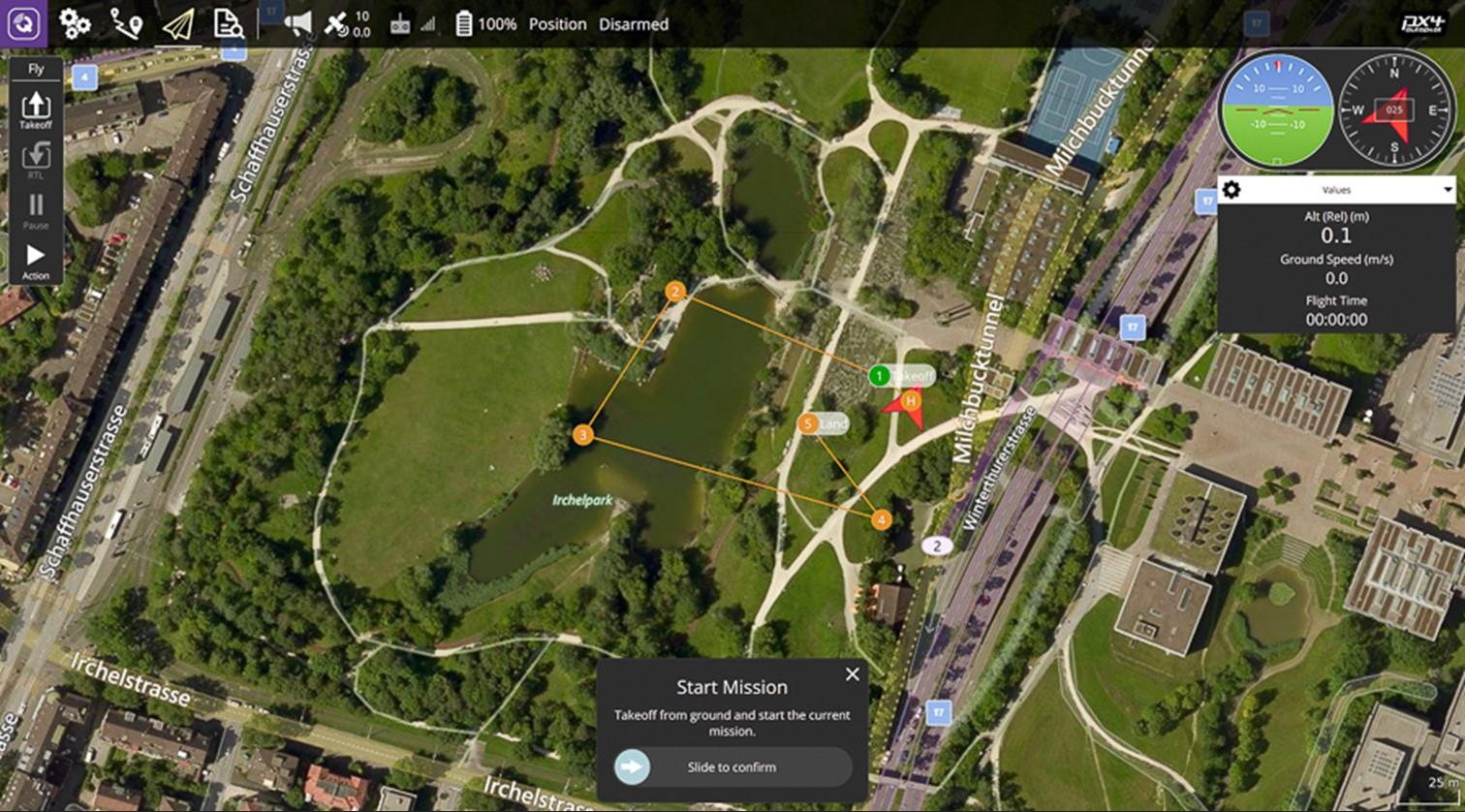
Buat rencana penerbangan dalam satu ketukan
Satu ketukan pada peta interaktif FreeFlight 3D adalah semua yang anda perlukan untuk bangunan pengimbasan pantas. Kecerdasan buatan secara automatik menentukan parameter dan lintasan penerbangan yang optimum. Gambar 48MP dengan rujukan geografi tepat ANAFI Ai sensor (IMU, GNSS dan Masa Penerbangan) membolehkan pembinaan semula 3D yang tepat.
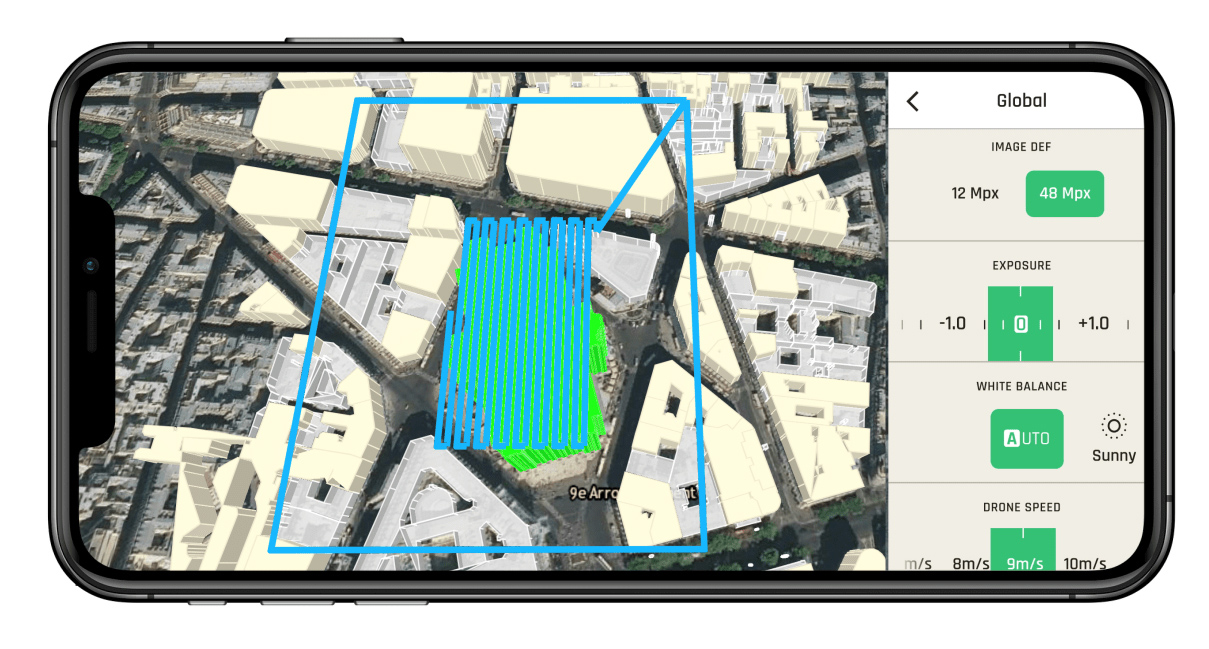 Pelan penerbangan automatik dibuat dengan sekali ketuk dalam pendaftaran darat 3D.
Pelan penerbangan automatik dibuat dengan sekali ketuk dalam pendaftaran darat 3D.
- Latar belakang kartografi FreeFlight 7 adalah dari perisian ArcGIS. Perwakilan bangunan 3D berdasarkan data OpenStreetMap yang meliputi bandar-bandar di seluruh dunia.
- Sistem visualisasi memastikan keselamatan rancangan penerbangan tertentu: pengguna tidak perlu bimbang tentang halangan. ANAFI Ai mengelakkan mereka secara autonomi.
Penerbangan autonomi
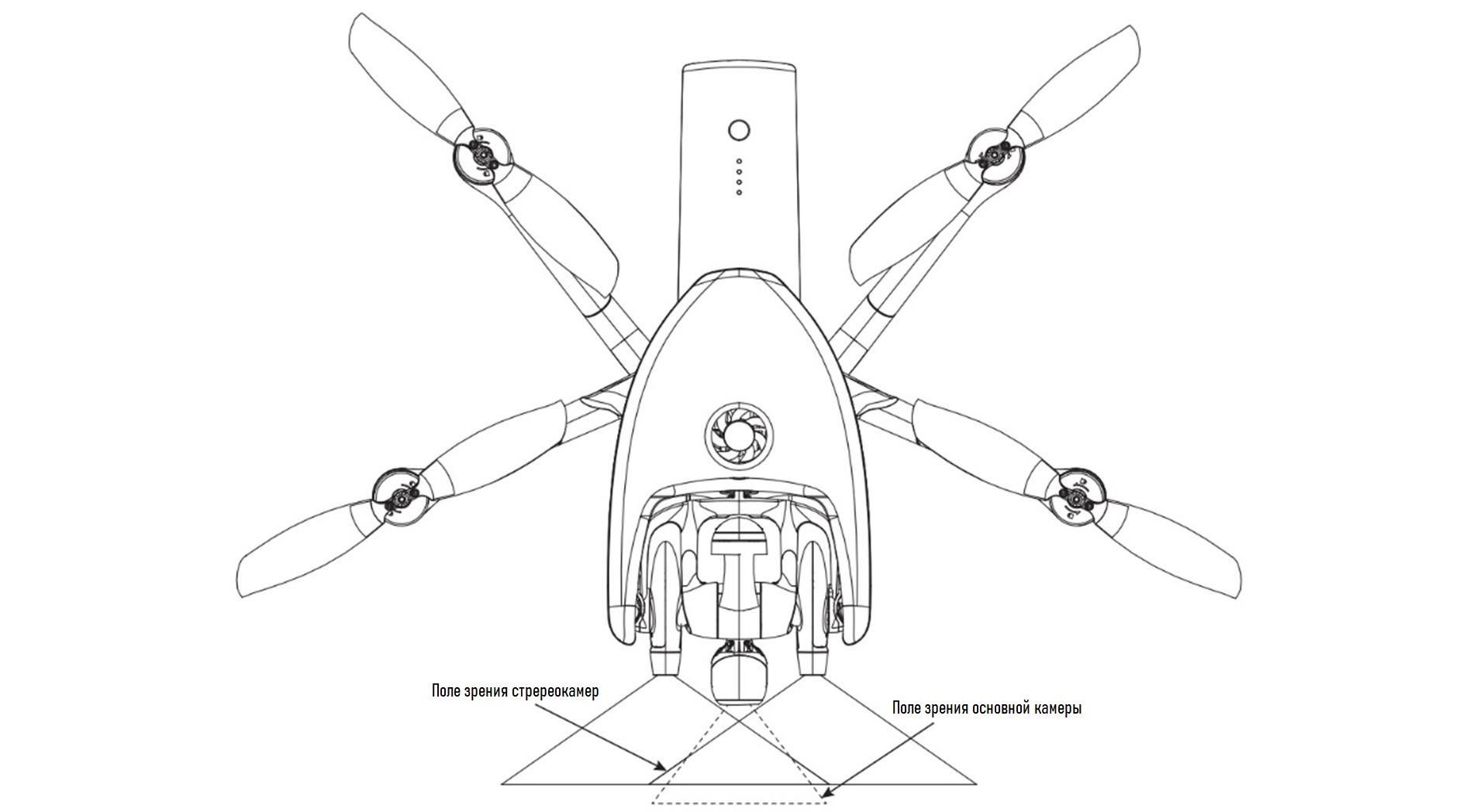
Sistem sensor omnidirectional ANAFI Ai, berdasarkan penglihatan stereoskopik, secara automatik mengarahkan dirinya ke arah perjalanan.

Drone mengesan rintangan yang berjarak 30 meter. Teknologi AI sentiasa membangun dan mengemas kini grid pengisian semasa melaksanakan rancangan penerbangan yang diberikan. Ia mewakili persekitaran drone dalam voxel.
Algoritma menentukan lintasan terbaik untuk mengelakkan bertabrakan dengan rintangan sementara drone tetap fokus pada sasarannya: misi penerbangan yang ditetapkan.

Sambungan 4G
ANAFI Ai adalah mikrodron komersial pertama yang dilengkapi dengan modul 4G. Ia merangkumi lebih dari 98% frekuensi yang digunakan di seluruh dunia.

Tinjauan talian kuasa voltan tinggi. Dipotret dengan ANAFI Ai, diedit dengan Pix4Dmatic. Ukuran pemandangan: 4060 × 60 × 70 m. Bilangan gambar: 2172. GSD: 1.3 cm / piksel. Tinggi: 90 m. Pertindihan depan / sisi: 90% / 65%.
Drone dapat beralih dari Wi-Fi ke 4G dengan lancar dan sebaliknya, sehingga memberikan sambungan yang paling dapat diandalkan, yang pada gilirannya menjamin:
- Kemampuan untuk melakukan penerbangan BVLOS
- Sambungan stabil walaupun terbang di persekitaran dengan rintangan dan bangunan
- Penerbangan selamat di persekitaran dengan kebisingan tinggi
- Kualiti pautan video 1080p @ 30 fps
- ) Muat naik gambar secara langsung ke pelayan awan

Pengoptimuman masa penerbangan
Menurut pemaju, penjimatan masa yang signifikan dicapai kerana imej yang tinggi ciri ANAFI Ai:
- 48MP membolehkan drone terbang lebih dari 1.5 kali lebih tinggi daripada drone dengan sensor 1-inci 20MP, sambil mencapai GSD yang sama. Dengan kata lain, ketinggian yang lebih tinggi dan misi yang lebih cepat berjalan seiring.
- 1 fps fotografi: ANAFI Ai merakam dua kali lebih pantas Autel EVO 2 dan DJI Phantom 4 Pro V2.0.
Pemindahan 4G dalam penerbangan ke PIX4Dcloud
Dalam proses membuat model digital dari foto udara drone, memindahkan fail dan memproses gambar adalah dua tugas yang memakan masa. ANAFI Ai membantu pengguna mempercepat aliran kerja mereka. Secara khusus, sistem drone membolehkan:
- Memindahkan gambar ke pelayan selamat secara langsung semasa penerbangan menggunakan sambungan 4G drone.
- Segera mulailah mengira objek pada akhir penerbangan: ortomosa, awan titik, model ketinggian dan mesh bertekstur.
- Bagikan peta 2D dengan mudah dan kaji model 3D berkualiti dengan pekerja dan pelanggan.
![]()
Keserasian Suite PIX4D
ANAFI Ai kini serasi sepenuhnya dengan rangkaian aplikasi fotogrametri mudah alih, desktop dan awan yang unik yang terdiri daripada:
Fotogrametri atau lidar
Mengapa memilih fotogrametri untuk tinjauan dan tinjauan? Selain aksesibilitas dan kemudahan penggunaan, fotogrametri udara adalah pilihan terbaik apabila interpretasi visual data diperlukan.
Pro fotogrametri
- Menyediakan pelbagai visualisasi: ortomosa, awan titik warna, jaring bertekstur.
- Membuat awan titik dengan kepadatan yang lebih tinggi, masing-masing mengandungi sejumlah besar maklumat (tinggi, tekstur, warna).
- Melepasi LIDAR dalam ketepatan rendering 2D dan 3D fotorealistik - LIDAR tidak memberikan perincian kontekstual yang tinggi.
Kekurangan LIDAR
- Kos 100 kali lebih tinggi daripada UAV dengan matriks RGB.
- Kerumitan pemprosesan data dan kemungkinan kesalahan tafsiran.
- Menambah maklumat warna mungkin, tetapi menyukarkan prosesnya.
- LIDAR hanya menghasilkan awan titik dan ditujukan untuk kes dan situasi tertentu.
SDK
Kit Pembangunan Perisian Parrot adalah sekumpulan alat dan perisian sumber terbuka untuk pemaju. Sejak penciptaan drone pertama A. R. Drone, perisian sumber terbuka syarikat menyokong platform dan alat pemaju, dan Parrot
Pembangun menjelaskan bahawa semua sumber SDK syarikat tersedia secara percuma, tanpa pendaftaran dan penjejakan, di portal " Parrot Portal Pembangun"... Anda juga boleh menyertai ribuan pemaju di forum Parrot di mana anda boleh membincangkan topik semasa secara langsung dengan jurutera syarikat.
SDK Udara
Jalankan kod anda di ANAFI Ai
SDK Udara menyediakan seni bina teknologi revolusioner untuk memuat turun dan menjalankan kod terus di ANAFI Ai. Pembangun dapat memprogram misi penerbangan yang dirancang khusus dengan akses ke semua sensor drone, antara muka sambungan dan fungsi autopilot.
Air SDK menyediakan akses ke kapal ke:
- Semua sensor (IMU, GPS, TOF) dan mod penerbangan
- Aliran video dan metadata dengan semua kamera
- Antaramuka komunikasi Wi-Fi, 4G, USB
- Peta kedalaman dan grid pengisi
- Penciptaan lintasan penghindaran halangan
Mana-mana pembangun boleh:
- Mengubah keadaan drone dengan membuat misi penerbangan
- Mengubah mod navigasi
- Menambah proses Linux tertanam (untuk contohnya, pindahkan data melalui saluran 4G atau gunakan penglihatan komputer)
SDK Udara menyokong bahasa pengaturcaraan C atau Python. Air SDK dilengkapi dengan panduan pemasangan terperinci dan dokumentasi API. Banyak contoh aplikasi menggambarkan semua kemungkinan yang ditawarkan oleh seni bina yang unik.
Ground SDK
Bina Aplikasi Mudah Alih yang Kuat
Ground SDK adalah platform perisian Ground Control Station (GCS) untuk peranti mudah alih (iOS dan Android disokong). Ini membolehkan mana-mana pembangun membuat aplikasi mudah alih untuk ANAFI Ai untuk kawalan drone seterusnya dari peranti mudah alih. Semua fungsi BVS (kawalan, video, tetapan) tersedia melalui API yang mudah digunakan dan didokumentasikan sepenuhnya.
OpenFlight
Stesen Kawalan Tanah Sumber Terbuka
Buat pertama kalinya, Parrot membuka kod sumber untuk aplikasi stesen kawalan darat. OpenFlight adalah teras aplikasi FreeFlight 7 sumber terbuka kami yang terkenal. Ini membolehkan pembangun memberi tumpuan untuk menambahkan fungsi mereka sendiri dan segera mempunyai aplikasi yang kelihatan profesional yang siap diterbitkan ke AppStore.

OpenFlight berisi:
- Semua UX FreeFlight 7
- Semua tetapan antara muka
- Kod untuk visualisasi 3D halangan masa nyata
- Kod untuk menguruskan komunikasi 4G
- OpenFlight diterbitkan di bawah lesen BSD-3 dengan panduan pemasangan lengkap dan dokumentasi lengkap.
Sphinx
Simulasi Fotorealistik 3D
Parrot Sphinx adalah alat simulasi drone canggih. Jurutera burung beo menggunakannya untuk mengembangkan dan menguji semua ciri ANAFI Ai. Konsep umum adalah untuk mensimulasikan firmware sebenar drone dengan semua sensornya dalam persekitaran visual dan fizikal yang realistik.

Parrot Sphinx membenarkan:
- Simulasikan semua kamera dan sensor
- Simulasikan peta kedalaman dan segmentasi gambar
- Navigasi banyak pemandangan 3D yang realistik
- Sambungkan ke pelbagai jenis alat kawalan jauh
- Gunakan skrip untuk mengawal simulasi
- Tambahkan pejalan kaki dan kenderaan
- Visualisasikan dan rakam data penerbangan
- Sesuaikan sensor pesawat dan elemen fizikal sekitarnya
- Faktor kawalan masa sebenar
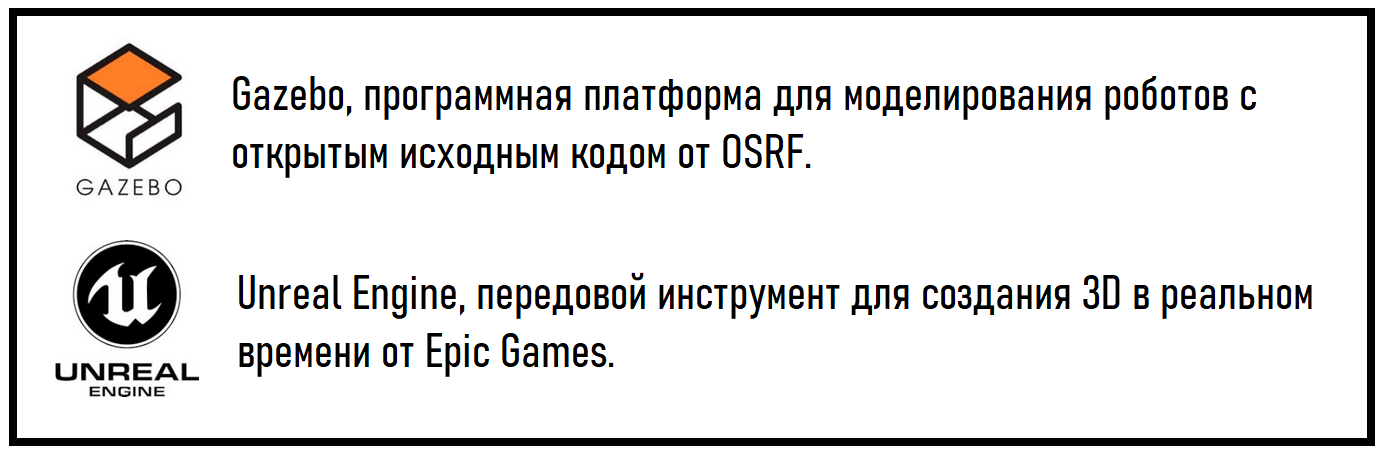
Parrot Sphinx dibina berdasarkan standard canggih komponen:
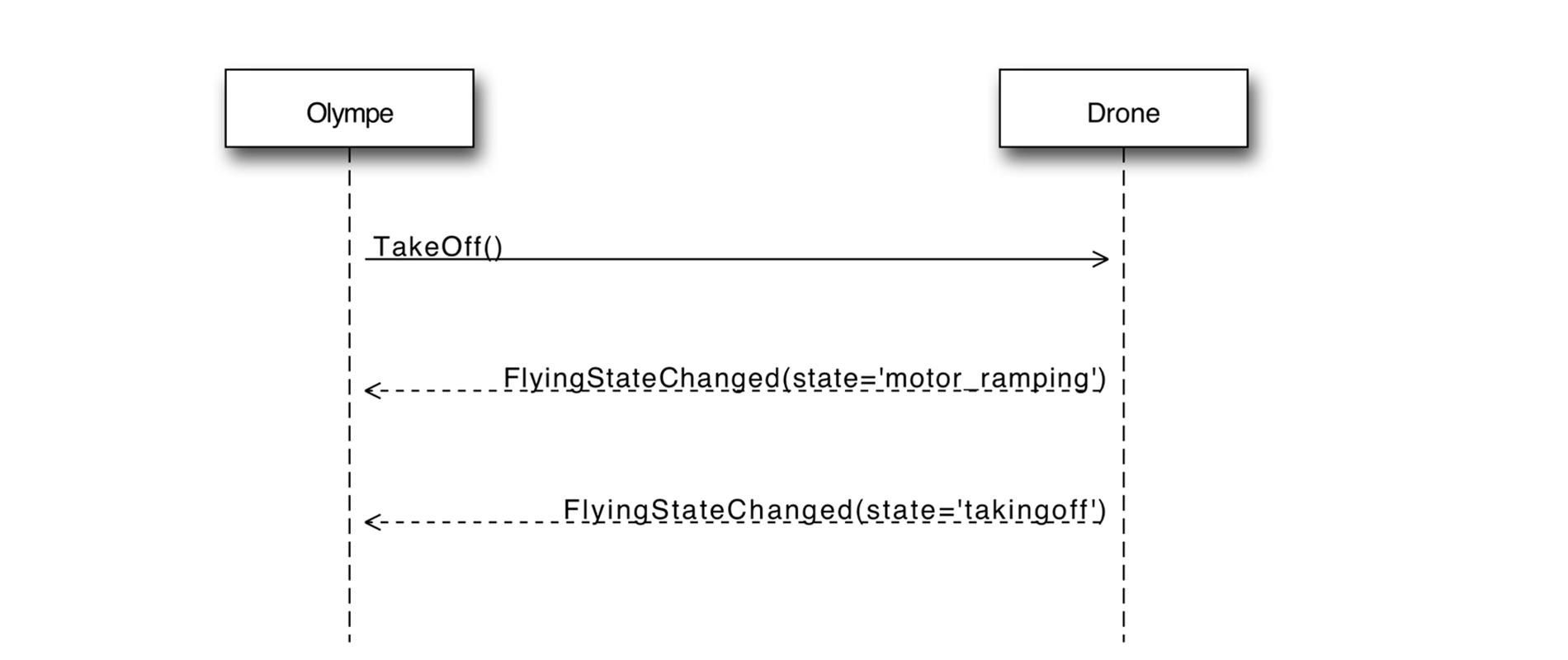
Olympe
Python untuk mengawal ANAFI Ai
Olympe menyediakan antara muka pengaturcaraan pengawal Python untuk ANAFI Ai. Tujuan asal Olympe adalah untuk berinteraksi dengan persekitaran pemodelan Sphinx. Olympe juga dapat mengawal ANAFI Ai fizikal dari komputer jauh.
Kerangka Olimpik membolehkan:
- Menyambung ke simulasi atau fizikal ANAFI Ai
- Menghantar mesej arahan (pandu arah, orientasi kamera, Kembali ke rumah), Pelan Penerbangan)
- Mulakan dan hentikan penstriman video dari semua kamera
- Rakam aliran video dan metadata yang diselaraskan
) PdrAW
Pemain Media Lanjutan
PDrAW adalah penonton video lanjutan untuk media ANAFI Ai. Penonton menyokong kedua-dua streaming (RTP / RTSP) dan rakaman (MP4) video di platform Linux, macOS, Android dan iOS. PDrAW hadir sebagai perpustakaan (libpdraw), perpustakaan pembungkus (libpdraw-backend), dan eksekusi mandiri (pdraw).
PDrAW juga menguruskan metadata video. Pada ANAFI Ai, streaming dan video yang dirakam termasuk metadata yang tersedia untuk umum dan didokumentasikan, yang memungkinkan pemprosesan video udara maju.
Model C. A. D.
Parrot menyediakan model 3D drone mereka untuk penyatuan ke dalam reka bentuk CAD anda untuk prototaip cepat dan integrasi aksesori.
Keserasian MAVLink dan GUTMA
ANAFI Ai serasi dengan protokol MAVLink v1 sumber terbuka standard, yang membolehkan pertukaran data masa nyata antara UAV dan stesen kawalan. ANAFI Ai dapat dikendalikan secara manual atau menggunakan perancangan penerbangan automatik dari stesen pangkalan yang serasi dengan MAVLink seperti QGroundControl.
* Antara muka QGroundControl
ANAFI Ai serasi dengan protokol data penerbangan standard sumber terbuka GUTMA. Global UTM Association adalah konsortium pemain utama dalam bidang kawalan lalu lintas udara.

Ekosistem rakan kongsi terbesar untuk drone Parrot
Parrot terus mengembangkan ekosistem global penyedia perisian untuk drone melalui program SDK rakannya menawarkan penyelesaian khusus dan unik untuk keperluan pengguna profesional yang semakin meningkat dan berkembang.
Burung beo untuk setiap keperluan bisnis
Untuk mendapatkan hasil maksimal dari proses pemeriksaan, Parrot menawarkan kepada pelanggannya ekosistem perisian drone yang serasi mulai dari manajemen armada, penerbangan kompilasi merancang dan mengimport log penerbangan, sebelum menembak, memetakan, memantau dan menganalisis data yang diterima.
PIX4D × Parrot
Aplikasi pemodelan 2D / 3D. Satu set aplikasi fotogrametri mudah alih, desktop dan awan yang unik.
Verizon x Skyward x Parrot
Penyelesaian drone 4G LTE di Amerika Syarikat. Drone robot ANAFI Ai yang pertama seumpamanya disambungkan ke rangkaian Verizon 4G LTE dengan perisian Skyward yang telah dipasang sebelumnya. Membuka pintu untuk pemindahan data masa nyata hampir, penyebaran jarak jauh, dan penerbangan luar-pandangan.

Skyward × Parrot
Integrasi dan pembelajaran dalam kapasiti ANAFI. Platform pengurusan penerbangan termasuk ruang udara, akses LAANC, dan latihan, peralatan dan sambungan untuk penggunaan armada drone syarikat.

DroneSense × Parrot
Bangun, atur dan skala program drone anda. Profesional kenderaan udara tanpa pemandu di sektor keselamatan awam boleh menggunakan rangkaian kemampuan DroneSense sepenuhnya, yang direka khas untuk keperluan responden pertama.

Rakan Ekosistem Parrot

Program Afiliasi Parrot
Pembangun mencadangkan untuk mengembangkan keupayaan programnya untuk drone dengan mengintegrasikan SDK mereka.
Keselamatan siber
Kerahsiaan data
Pembangun menyatakan bahawa dia tidak mengumpulkan sebarang data tanpa persetujuan pengguna. Keputusan sama ada untuk memindahkan data ke infrastruktur Parrot atau tidak terletak pada pengguna sendiri. Data yang dihoskan di Parrot memungkinkan pengguna menyegerakkan data penerbangan dan rancangan penerbangan antara peranti yang berlainan, serta memfasilitasi sokongan dan memungkinkan Parrot meningkatkan produknya.
ANAFI Ai mematuhi Peraturan Perlindungan Data Umum Kesatuan Eropah (GDPR) dan melangkah lebih jauh, misalnya, memungkinkan anda menghapus semua data dalam 1 klik, sehingga memberikan pengguna kontrol yang paling mudah. Masalah satu klik ini diselesaikan dalam aplikasi mudah alih FreeFlight7 atau dalam tetapan privasi akaun Parrot. Cloud. Oleh itu, pengguna pada bila-bila masa bukan sahaja dapat berhenti bertukar data, tetapi juga dengan mudah meminta penghapusannya.
Jika pengguna menyetujui pertukaran data, pemrosesan mereka akan dilakukan dalam format yang sepenuhnya transparan, yang dijelaskan secara terperinci dalam Dasar Privasi Parrot.
Apabila ANAFI Ai disambungkan ke Skycontroller 4 melalui 4G, infrastruktur Parrot digunakan untuk memasangkan drone dan alat kawalan jauh. Sekiranya pengguna tidak masuk ke akaun Parrot. Cloud, dia masih boleh menggunakan sambungan 4G dengan akaun sementara yang unik. Semasa menggunakan infrastruktur Parrot untuk pemasangan 4G, video disulitkan menggunakan kunci yang dipersetujui antara drone dan alat kawalan jauh, Parrot tidak mempunyai akses ke video yang tidak disulitkan.

Sesuai dengan FIPS140-2 dan Elemen Selamat CC EAL5
ANAFI Ai mempunyai elemen keselamatan Wisekey terbina dalam yang mematuhi NIST FIPS140-2 Tahap 3 dan Kriteria Biasa disahkan EAL5. Elemen keselamatan yang serupa juga dimasukkan ke dalam perkakasan kawalan Skycontroller 4.
Fungsi elemen keselamatan:
- Melakukan operasi kriptografi
- Menyimpan dan melindungi maklumat sulit
Ia menggunakan kunci ECDSA peribadi dengan parameter domain P521, yang unik untuk setiap drone. Ia tidak dapat diambil dari elemen keselamatan. Dan sijil yang dikaitkan dengan kunci ini ditandatangani oleh pihak berkuasa perakuan.
Wisekey melindungi integriti firmware, memberikan pengenalan drone unik untuk pasangan 4G dan pengesahan yang kuat, dan tandatangan digital unik foto yang diambil oleh drone.

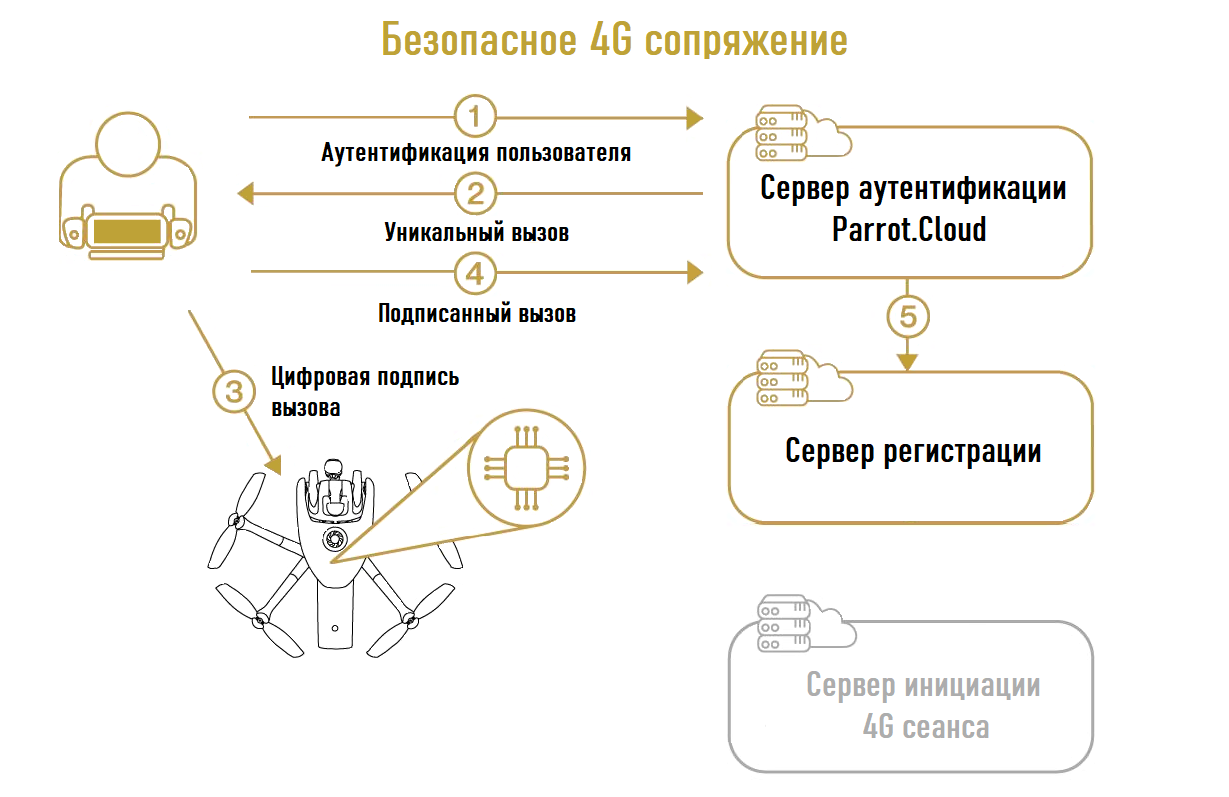
4G sambungan selamat dan pengesahan yang kuat
proses memasangkan peranti dengan selamat. Semasa proses ini, pengguna dengan pasti mengesahkan bahawa dia tersambung ke drone tertentu. Terima kasih kepada ANAFI Ai Secure Element, dia dapat melakukannya tanpa memasukkan kata laluan di dalam drone.
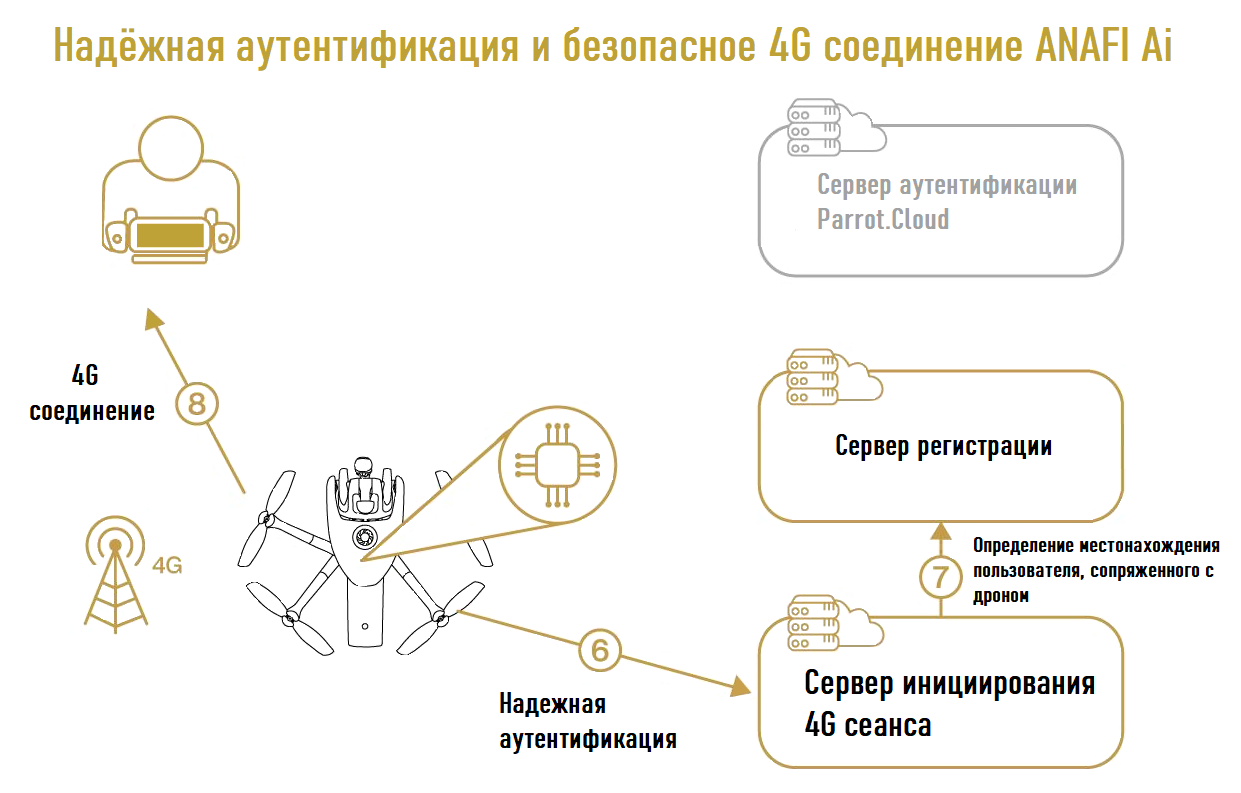
Pelayan Parrot kemudian mendaftarkan komunikasi antara pengguna dan drone. Apabila sambungan Wi-Fi antara pengguna dan drone terputus, ANAFI Ai secara automatik akan beralih ke sambungan 4G. ANAFI Ai melakukan pengesahan yang kuat pada pelayan Parrot menggunakan kunci peribadinya yang tersimpan di Elemen Selamat. Pelayan parrot mencari pengguna yang terhubung dan menyediakan antara muka antara ANAFI Ai dan Skycontroller 4.
Untuk melindungi kawalan drone dan aliran video yang datang ke Skycontroller 4, ANAFI Ai menyokong protokol TLS, DTLS dan SRTP.
Permulaan dan pengemaskinian yang selamat
Urutan but pesawat dilindungi: sistem memeriksa bahawa ia menggunakan perisian Parrot dan perisian ini belum diubah. Pemeriksaan keselamatan dilakukan pada setiap permulaan. Perkhidmatan kemas kini juga mengawal tandatangan digital kemas kini perisian.
Menyiapkan kunci pengguna pada Elemen Selamat
Pengguna ANAFI Ai mempunyai akses ke akaun operator khas Elemen Selamat. Akaun ini digunakan untuk mengatur kunci yang berkaitan dengan pengguna ini. Pengguna boleh mengkonfigurasi Elemen Selamat dengan kunci awam penyedia misi yang mereka percayai. ANAFI Ai hanya akan melakukan misi yang ditandatangani dengan kunci ini. Proses ini menghalang penyerang melakukan misi penerbangan jahat di drone.
Foto Bertanda Digital
Elemen Selamat dari ANAFI Ai dapat menandakan gambar drone secara digital. Tanda tangan ini adalah bukti bahawa:
- Gambar yang ditandatangani itu diambil oleh kenderaan udara tanpa pemandu yang ditunjukkan.
- Baik gambar itu sendiri maupun metadata yang diproses (secara sukarela atau tidak) - metadata, juga dikenal sebagai EXIF dan XMP, berisi informasi tentang tanggal, waktu dan lokasi gambar.

Dengan kata lain, tanda tangan digital melindungi semua data yang berkaitan dengan gambar, termasuk tempat dan waktu ketika diambil, dan ANAFI Ai yang dikendalikan.
Pengguna dan rakan kongsi yang menawarkan penyelesaian perisian menggunakan fotografi drone dapat mengesahkan tandatangan digital foto ANAFI Ai sama ada dengan sijil drone atau melalui katalog kunci awam yang disediakan oleh Parrot.
Pemeriksaan ketelusan dan keselamatan yang berterusan dengan karunia Bug
Parrot menggunakan protokol standard dan format fail apabila mungkin. Tidak ada kod tersembunyi atau ciri tersembunyi. Ini membolehkan pengguna memahami bagaimana produk Parrot berfungsi dan menguji keselamatannya. Di samping itu, OpenFlight, perisian yang digunakan untuk mengendalikan drone, adalah sumber terbuka, memberikan pengguna kawalan penuh.
Pada bulan April 2021, Parrot melancarkan Program Bug Bounty dengan YesWeHack, platform keselamatan orang ramai pertama di Eropah. Melalui perkongsian ini, Parrot memanfaatkan komuniti penyelidikan keselamatan siber YesWeHack yang luas untuk mengenal pasti potensi kelemahan dalam drone, aplikasi mudah alih dan perkhidmatan webnya.
Program Bug Bounty terdiri daripada dua fasa:
Program Swasta pada awalnya memberikan akses eksklusif untuk penyelidik keselamatan terpilih dan termasuk model drone Parrot masa depan. Pengalaman dan kemahiran pelbagai penyelidik akan mengesahkan tahap keselamatan produk yang tinggi sebelum mereka pergi ke pasaran, yang akan membantu meningkatkan keselamatan pengguna Parrot dan perlindungan data mereka.
Setelah pusingan pertama program Bug Bounty peribadi dan setelah dikomersialkan, produk masuk ke program umum. Keselamatan mereka kemudian diperiksa dengan ketat oleh seluruh komuniti YesWeHack yang terdiri daripada lebih daripada 22,000 penyelidik keselamatan siber.

Pengurusan Data
Parrot Cloud membolehkan pengguna yang memilih untuk berkongsi data mereka untuk menguruskan data penerbangan dan armada, serta multimedia data yang diterima oleh drone mereka.
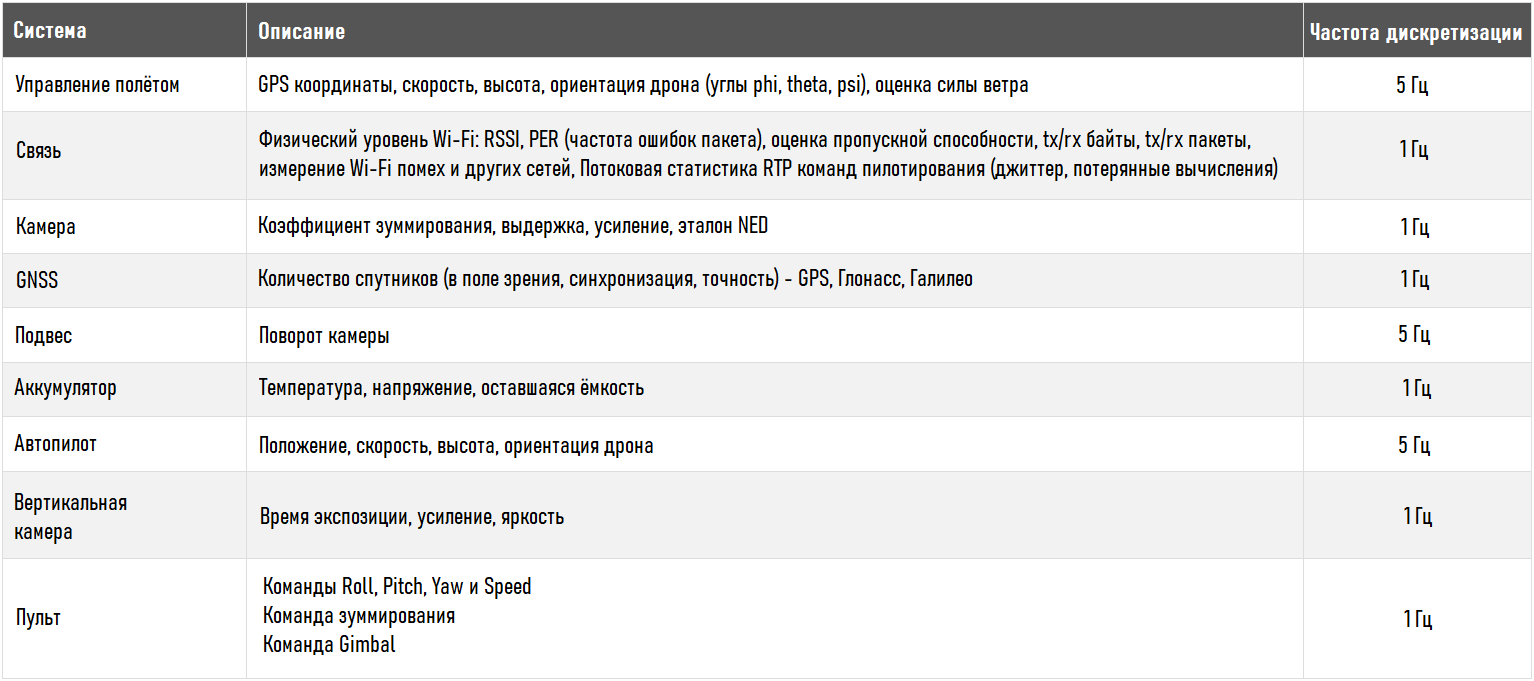
Data yang dikumpulkan
Parrot Cloud mengumpulkan 4 jenis data:
Statik (data produk):
- Pesawat nombor siri
- Nombor siri bateri
- Versi firmware pesawat dan bateri
- Versi perkakasan pesawat dan bateri
- Model peranti
- Pelepasan FreeFlight 7 Versi
Acara
- Makluman: Bateri, Autopilot, Sensor
- Komunikasi: sambungkan / putus, memulakan penstriman, amaran gangguan, isyarat lemah
- Kamera: statistik streaming, perubahan perubahan
- Penerbangan: perubahan keadaan (lepas landas, mendarat, melayang, dll.), pengaktifan tugas penerbangan (rancangan penerbangan, fotogrametri)
"Imej kontekstual"
- Timelapse- snapshot dan (2 minit sekali)
- Pembelajaran Dalam (memetakan lebih banyak objek, landskap untuk meningkatkan otonomi penerbangan, pengesanan, penghindaran halangan)
- Stereovision (peta kedalaman)
- Imej dicetuskan mengikut peristiwa
- Permulaan dan akhir penyataan hover tepat, pendaratan tepat
- Kemalangan drone
- Wajah secara automatik kabur semasa penghantaran
Telemetri
Penggunaan akhir data yang dikumpulkan
Parrot hanya mengumpulkan dan menggunakan data dari pelanggan yang telah bersetuju untuk membagikannya untuk meningkatkan kualiti produknya...
Pengurusan Penyelenggaraan
Penyelenggaraan Pencegahan: Alat kami mengumpulkan semua maklumat yang berkaitan dengan misi (jenis misi, masa berlepas dan mendarat, jumlah misi, lokasi drone, kelajuan penerbangan, rancangan penerbangan dan tetapan AirSDK). Ini membolehkan anda menerima maklumat yang tepat mengenai status armada drone ANAFI Ai (serta pengawal dan baterinya) dalam masa nyata.
Penyelenggaraan Pembetulan: Maklumat yang dikumpulkan berguna untuk menentukan status drone atau bateri tertentu dengan cepat.
Meningkatkan Kecerdasan Buatan (AI)
Elemen AI ANAFI Ai (PeleeNet, rangkaian konvensional, dll.) Menawarkan pengguna perkhidmatan dan ciri yang tiada tandingan: penghalang halangan, pengesanan sasaran, beberapa mod penerbangan. Kualiti AI bergantung pada kuantiti dan kualiti data yang dikumpulkan (gambar dan video): data ini memberi makan pembelajaran mesin. Dalam hal ini, kualiti data bukan satu-satunya elemen yang menentukan: metadata yang berkaitan dengan data ini juga penting. Atas sebab ini, alat kami mengumpulkan gambar dan metadata secara berkala dan bergantung pada peristiwa, dengan jumlah 30 hingga 50 MB per minit.
Ciri penerbangan
Ciri aerodinamik
Pemacu dan aerodinamik
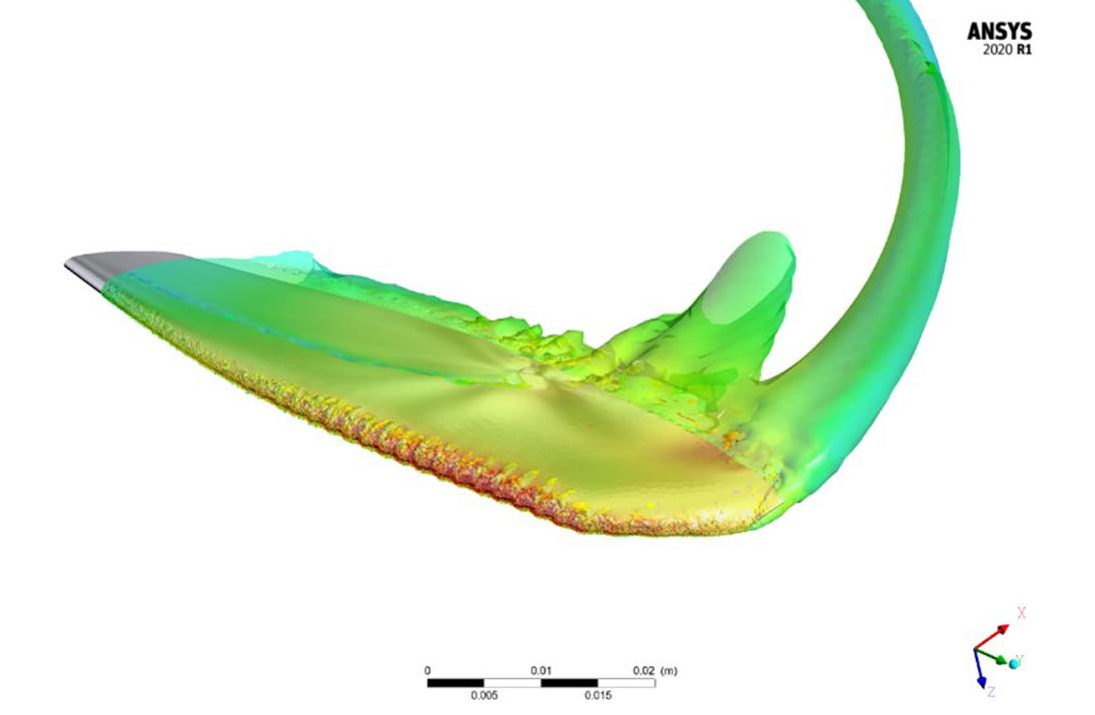 CFD gambar bilah baling-baling ANAFI Ai
CFD gambar bilah baling-baling ANAFI Ai
Bilah baling-baling biomimikri baru dengan paus tepi seperti humpback. Pendekatan ini memungkinkan untuk meningkatkan kecekapan pendorong loji tenaga, yang pada output memberikan peningkatan daya tuju pada kecepatan putaran yang sama. Kesan ini setanding dengan peningkatan diameter rotor.
Bunyi akustik, terutama bunyi tonal, yang berasal dari tepi depan juga berkurang. Oleh itu ANAFI Ai lebih senyap [71.5 dB SPL (A) pada 1 m] daripada Skydio 2 [76.4 dB SPL (A) pada 1 m].
- Masa penerbangan lebih dari 32 minit
- Berkat ciri aerodinamik yang dioptimumkan pada pesawat dan sistem pendorong ANAFI Ai, kelajuan maksimum dalam penerbangan ke depan adalah 61 km / j, dengan penerbangan sampingan dan penerbangan belakang 58 km / j
- Maks. rintangan angin 12.7 m / s.
- Berkat kecekapan torsi tinggi motor / baling-baling dan autonomi bateri yang tinggi, jaraknya adalah 22.5 km (dengan kecepatan tetap 50 km / j dalam cuaca yang tenang).
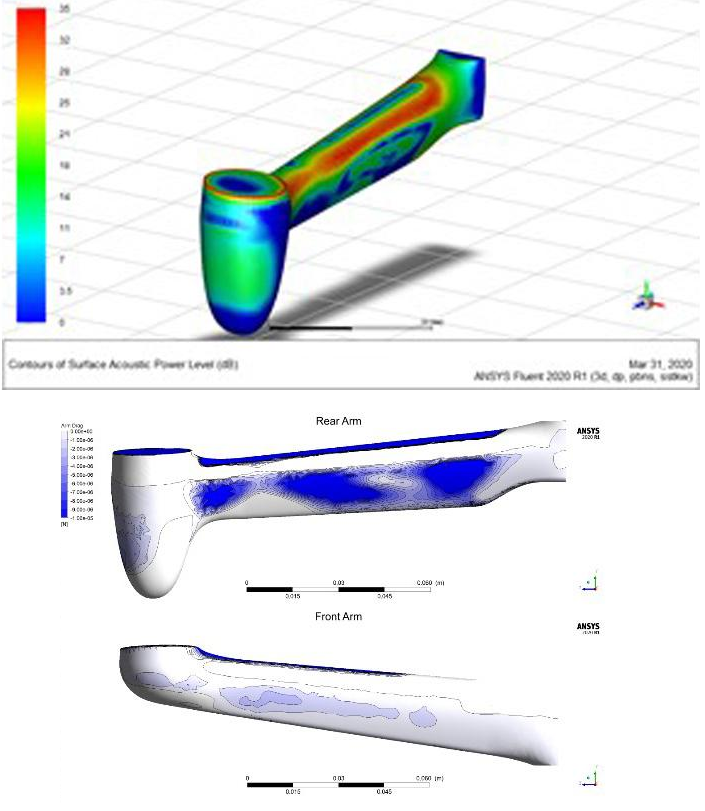 Gambar CFD rasuk ANAFI Ai
Gambar CFD rasuk ANAFI Ai
Sensor
Untuk memastikan penerbangan selamat ANAFI Ai dilengkapi dengan:
- 2 × IMU (ICM-40609-D dan ICM42605)
- Magnetometer LIS2MDL
- Modul GPS UBX-M8030
- TI OPT3101 waktu penerbangan (ToF)
- Barometer LPS22HB
- Kamera menegak
Ciri-ciri sensor
IMU Penerbangan: ICM-40609-D
- giroskop 3 paksi
- Julat: ± 2000 ° / s
- Resolusi: 16.4 LSB / ° / s
- Offset / Ketepatan: ± 0.05 ° / s (selepas penentukuran terma dan dinamik)
- pecutan 3 paksi
- Julat: ± 16g
- Resolusi: 2.048 LSB / mg
- Offset / ketepatan: ± 0.5 mg (XY) ± 1 mg (Z) (selepas penentukuran terma dan dinamik)
- Kawalan suhu s: sistem pemanasan terkawal berhubung dengan suhu persekitaran, stabil dalam: ± 0.15 ° C
- Kekerapan pengukuran: 2 kHz
Magnetometer: LIS2MDL
- Julat: ± 49.152G
- Resolusi: 1.5 mG
- Offset / Ketepatan: ± 15 mG (selepas pampasan, pada kelajuan motor maksimum)
- Mengukur frekuensi: 100 Hz
Barometer: LPS22HB 1
- Julat: 260 hingga 1260 hPa
- Resolusi: 0.0002 hPa
- Offset / ketepatan: ± 0.1 hPa
- Kawalan suhu: sistem pemanasan terkawal berhubung dengan suhu persekitaran, stabil dalam: ± 0.2 ° C
- Kekerapan pengukuran: 75 Hz
- Bunyi pengukuran: 20 cm RMS
GNSS: UBX-M8030 1
- Antena patch seramik 25 × 25 × 4 mm, membenarkan peningkatan 2 dB berbanding ANAFI 1
- Sensitiviti: permulaan sejuk -148 dBm / penjejakan dan navigasi: -167 dBm
- Masa-Ke-Pertama-Perbaiki: 40 saat
- Ketepatan / Ketepatan: Kedudukan (sisihan piawai 1.4 m), Kecepatan (sisihan piawai 0.5 m / s)
Kamera menegak
- Sensor gambar format: 1/6 inci
- Resolusi: 640 × 480 piksel
- Sensor gambar dengan pengatup global
- Hitam & putih
- FOV: Sudut pandangan mendatar: 53.7 ° / sudut pandangan menegak: 41.5 °
- Panjang fokus: 2.8 mm
- Mengukur kelajuan aliran optik di tanah pada 60 Hz
- 15Hz & ketepatan tepat @ 5Hz
ToF: TI OPT3101
- Julat: 0-15m
- Resolusi: 0.3 mm
- ) Ketepatan b: ± 2 cm (selepas penentukuran)
- Kekerapan pengukuran: 64 Hz
Kamera menegak IMU: ICM-42605
- Giroskop 3 paksi
- Julat: ± 2000 ° / s
- Resolusi: 16.4 LSB / ° / s
- Offset / ketepatan: ± 0.1 ° / s (selepas dinamik Kalibrasi)
- 3-Axis Accelerometer
- Julat: ± 16g
- Resolusi: 2.048 LSB / mg
- Offset / Ketepatan: ± 2.0 mg (XY) ± 5.0 mg (Z) - setelah penentukuran dinamik
- Kekerapan pengukuran: 1 kHz
- Penyegerakan perkakasan dengan kamera menegak, ketepatan: 1 μs
Autopilot
Pengawal Penerbangan ANAFI Ai menyediakan perintis mudah dan intuitif: tidak diperlukan latihan untuk mengendalikannya. Ini membolehkan anda mengautomasikan banyak mod penerbangan (Pelan Penerbangan, Kameramen, lepas landas, Smart RTH). Algoritma fusi sensor menggabungkan data dari semua sensor untuk menganggar nisbah, ketinggian, kedudukan dan halaju ANAFI Ai.
Penilaian keadaan penting untuk berfungsi dengan baik drone. Quadcopters sememangnya tidak stabil ketika pengawal penerbangan digunakan dengan gelung terbuka; untuk mengawalnya dengan mudah, belum lagi kawalan autonomi, perlu menstabilkannya menggunakan algoritma kawalan gelung tertutup. Algoritma ini mengira dan menghantar perintah ke motor yang diperlukan oleh ANAFI Ai untuk mencapai lintasan yang diinginkan.

Penerbangan dalam ruangan
Sekiranya tiada isyarat GPS, ANAFI Ai bergantung terutamanya pada pengukuran kamera menegak untuk menganggarkan kelajuan dan kedudukan. Prestasi kamera menegak ditentukan oleh dua algoritma utama:
- Aliran optik untuk anggaran kelajuan
- Pengesanan titik utama dan pemadanan untuk anggaran kedudukan
Kamera menegak algoritma boleh berfungsi dalam keadaan cahaya rendah berkat ANAFI Ai yang dilengkapi dengan sepasang lampu LED yang terletak di sebelah kamera menegak. Mereka membiarkan drone tetap stabil, terutama ketika terbang di dalam rumah atau tanpa adanya GPS, pada ketinggian kurang dari 5m di atas tanah. Kekuatan lampu LED menyesuaikan secara automatik, bergantung pada keperluan algoritma.
Penerbangan autonomi
Ciri-ciri utama
- Sistem penginderaan berputar dengan bidang pandangan luas
- Pengekstrakan kedalaman ruang sekitar berdasarkan penjajaran stereo dan kedalaman dengan pergerakan
- Perwakilan persekitaran dalam bentuk grid pengisian
- Pengesanan dan penghindaran halangan secara automatik di kelajuan hingga 29 km / j
Bab ini memperincikan sensor, perkakasan dan algoritma yang digunakan oleh ANAFI Ai untuk membolehkan penerbangan autonomi. Ia disusun seperti berikut:
- Penjelasan terperinci mengenai sistem persepsi ANAFI Ai
- Algoritma persepsi yang digunakan untuk membina semula persekitaran 3D yang mengelilingi drone
- Penjadualan ulang dan halangan penghindaran

Strategi sistem persepsi
Persepsi persekitaran tiga dimensi adalah keupayaan utama untuk mencapai penerbangan autonomi, terutamanya di ruang terkurung. Ini adalah prasyarat untuk pengesanan dan penghindaran rintangan yang dijamin, yang dapat mengurangkan beban pengendali drone, meningkatkan kejayaan misi dan memastikan keselamatan pesawat.
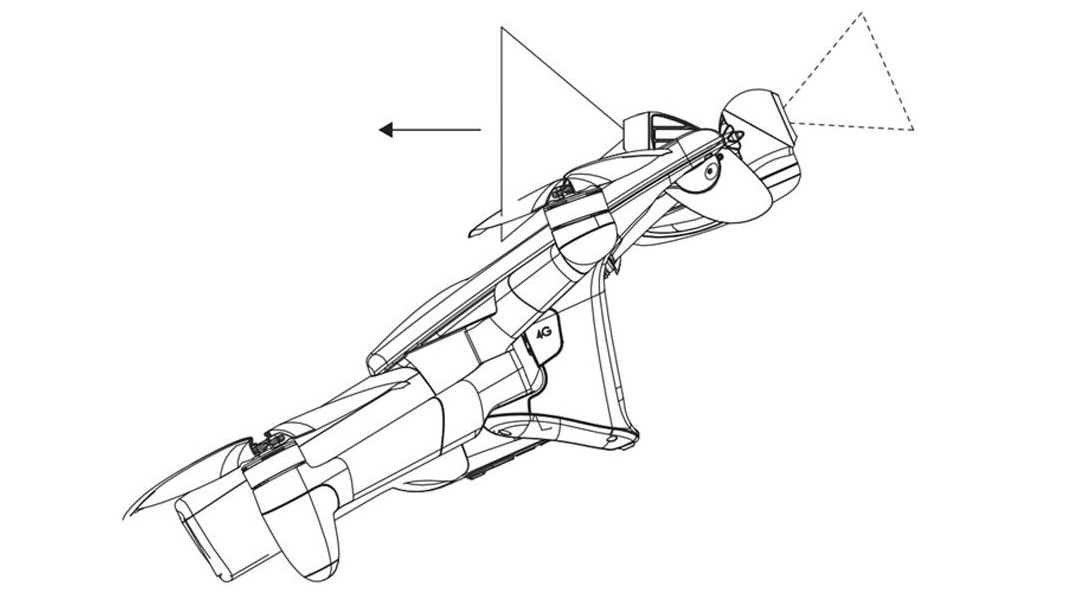
Untuk menggunakan potensi penuh kamera terbang, yang dapat bergerak bebas dan berputar ke semua arah tanpa sekatan, memerlukan solusi penginderaan yang efektif. Khususnya, sistem penginderaan harus dapat menerima maklumat tentang lingkungan dalam arah yang sesuai dengan gerakan maju dalam penerbangan - tanpa mengira orientasi kamera.
ANAFI Ai bergantung pada penyelesaian teknikal yang unik berdasarkan dua gimbal mekanikal untuk memisahkan orientasi kamera utama dan sistem penginderaan:
- Kamera utama dipasang pada 3- sumbu gimbal, menjadikannya orientasi 3D tidak bergantung pada orientasi drone.
- Sistem penginderaan dipasang pada gimbal paksi tunggal - dihubungkan dengan gerakan menggerakkan drone, ia dapat berorientasi ke arah mana pun.
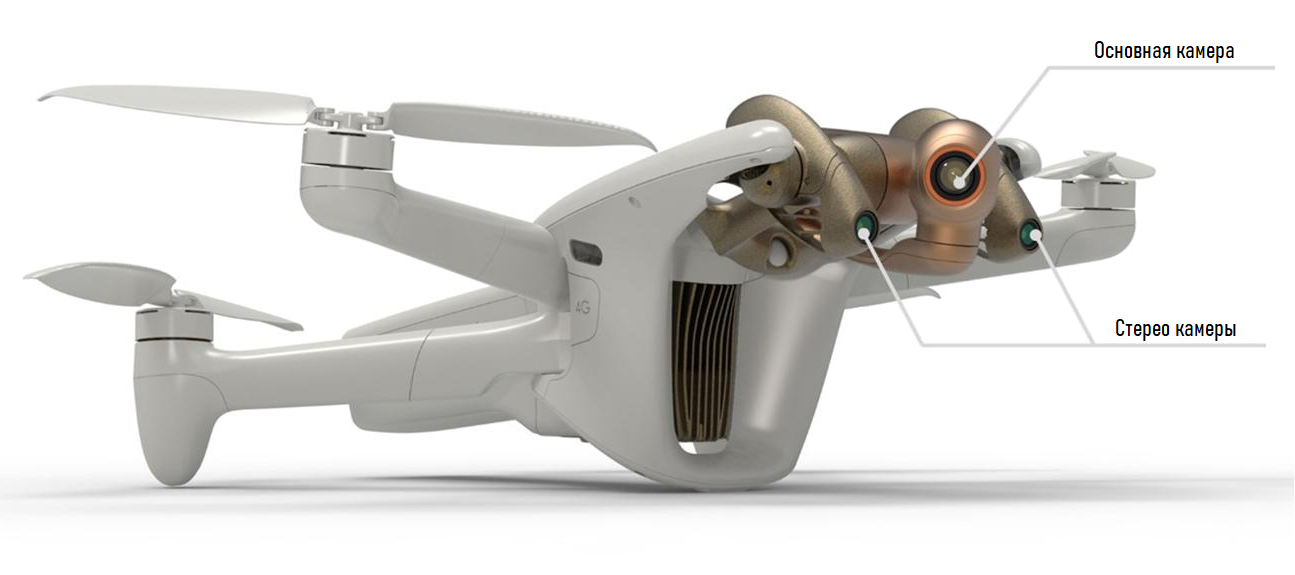 Penstabil dwi ANAFI Ai untuk persepsi dan visualisasi.
Penstabil dwi ANAFI Ai untuk persepsi dan visualisasi.
Paksi kecondongan dua penyangkut adalah collinear dan digabungkan untuk mencapai reka bentuk ultra-padat.
Berkat penyelesaian ini, mungkin untuk mengarahkan kamera utama dan sistem penginderaan dalam dua arah yang berbeza. Reka bentuk ini mengelakkan penggunaan kamera mahal di sisi, atas, bawah dan belakang drone sambil tetap menyediakan bidang pandangan yang tersedia untuk sistem penginderaan.
Bahagian ini disusun seperti berikut:
- Perincian sensor yang digunakan untuk sistem penginderaan
- Spesifikasi untuk kedua-dua gimbal kamera utama dan gimbal sistem penginderaan
- Strategi untuk mensasarkan sistem penginderaan untuk mengeksploitasi potensi struktur suspensi ganda
Sensor
Sistem penginderaan didasarkan pada pasangan kamera serupa dengan paksi satu nada...
 Engsel mekanikal 1-paksi untuk sistem penderiaan ANAFI Ai.
Engsel mekanikal 1-paksi untuk sistem penderiaan ANAFI Ai.
Spesifikasi sensor adalah seperti berikut:
- Model: Onsemi AR0144CSSM28SUD20
- Warna: Monokrom
- Resolusi: 1280 × 800 piksel1300]
- Laju bingkai: 30 fps
- Rana global
- Pandangan medan mendatar penuh: 118 ° (110 ° boleh digunakan untuk penginderaan)
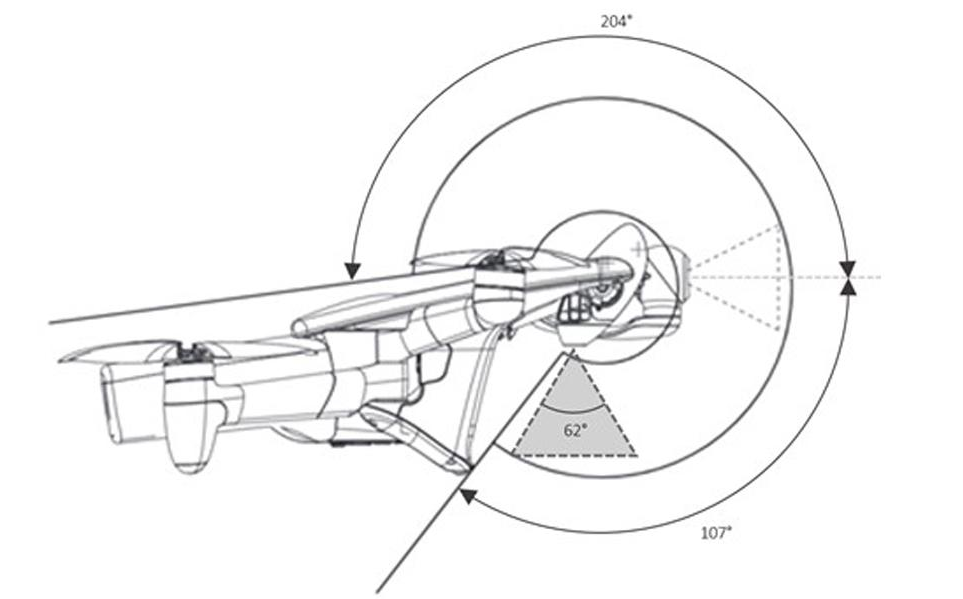
- Medan pandangan menegak penuh: 72 ° (62 ° boleh digunakan untuk penginderaan)
- Panjang fokus: 1.47 mm (0.039 inci - 492.94610 piksel)
- Apertur: f / 2.7
Spesifikasi The stereopair adalah seperti berikut:
- Paksi Pitch Biasa
- Garis Dasar / Jarak: 62 mm (2.44 inci)
- Tangkapan segerak pada 30 fps

Dual Gimbal
Gimbal mekanik kamera utama adalah pitch-rol mekanikal 3 paksi l-yaw "dengan ciri-ciri berikut:
- Pitch Limiters: -116 ° / 176 °
- Roll Limiters: / - 36 °
- Yaw Limiters: / - 48 °
Suspensi mekanikal sistem penderiaan adalah suspensi paksi tunggal dengan ciri-ciri berikut:
- Hentian berhenti di nada: -107 ° / 204 °
- Waktu perjalanan dari satu hentian ke ujung yang lain: 300 ms
Sistem penginderaan memiliki perjalanan 311 ° (di mana 296 ° tidak ditutupi oleh badan drone), yang memungkinkan persepsi ke belakang.
Medan pandangan menegak seketika dan sistem persepsi yang membatasi ANAFI Ai.
Sistem ini dirancang sedemikian rupa sehingga:
- Bilah baling-baling tidak memasuki bidang pandangan kamera utama
- kamera tidak meliputi bidang pandangan sistem persepsi
- Kamera utama dan sistem penginderaan dapat dilipat sepenuhnya untuk melindungi lensa
 Medan pandangan mendatar sistem persepsi ANAFI Ai.
Medan pandangan mendatar sistem persepsi ANAFI Ai.
Ketika bersandar, sistem persepsi bergerak ke posisi paling atas, sehingga memberikan pandangan yang jelas.
Persepsi ANAFI Ai dalam posisi berbaring sepenuhnya untuk penerbangan ke belakang.
Pembinaan semula persekitaran
Pembinaan semula persekitaran tiga dimensi sekitarnya untuk penerbangan autonomi dilakukan dalam dua peringkat:
- ) Mengekstrak maklumat kedalaman dari persepsi dalam bentuk peta kedalaman
- Menggabungkan data peta kedalaman ke dalam grid pengisian tiga dimensi
Dua kaedah digunakan untuk mendapatkan peta kedalaman dari sensor persepsi:
- Kedalaman berdasarkan penjajaran stereo
- Kedalaman dari gerakan
Kedalaman dari korespondensi stereo
Kaedah utama mengekstrak kedalaman maklumat berdasarkan paralaks antara dua kamera stereo sistem persepsi. Dengan memotret lingkungan dalam satu arah, tetapi dari dua posisi yang berbeda, objek dalam bidang pandangan sistem persepsi muncul dalam posisi yang berbeda dalam gambar yang diperoleh oleh dua kamera. Semakin dekat subjek, semakin besar perbezaan kedudukannya.
Oleh itu, strategi adalah menentukan titik-titik dalam gambar yang diperoleh oleh kamera stereo kiri dan kanan yang sesuai dengan objek yang sama dalam bidang pandangan sistem penginderaan, dan mengukur perbedaan posisi ini menunjuk pada dua gambar tersebut. Perbezaan ini disebut perbezaan dan diukur dalam jumlah piksel.
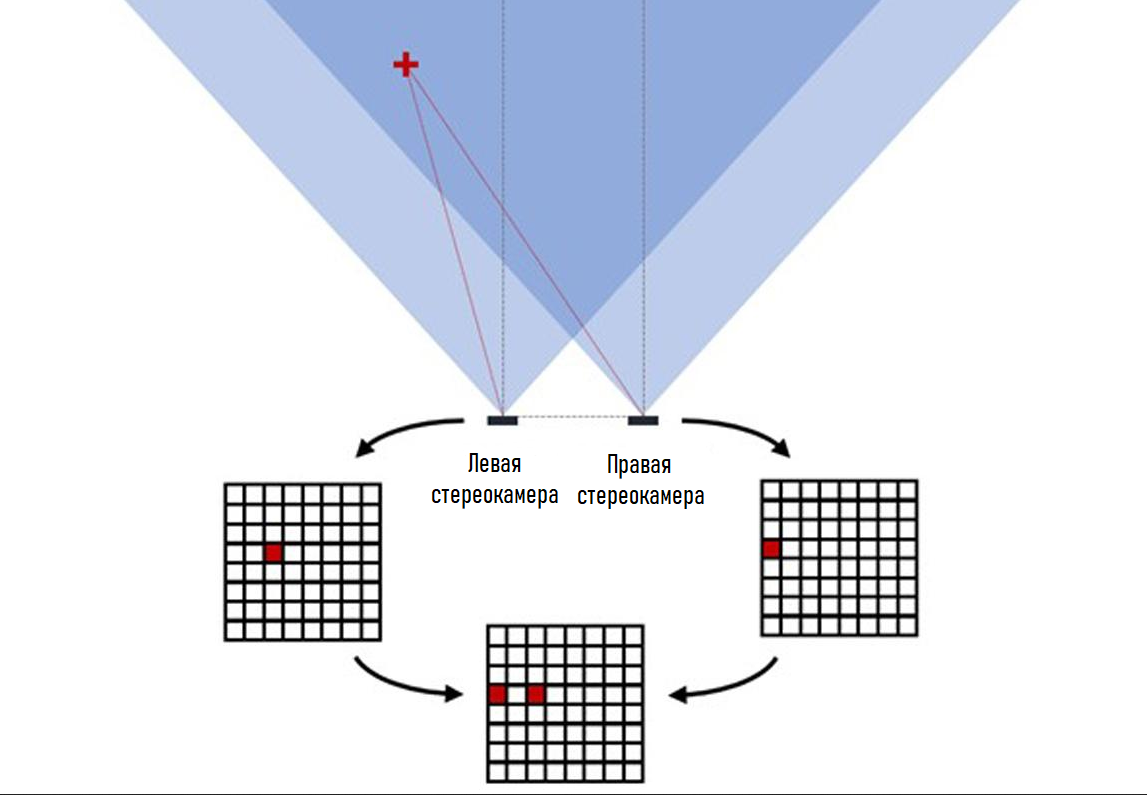 Ilustrasi prinsip penglihatan stereo - titik 3D merah berada dalam kedudukan yang berbeza pada gambar kiri dan kanan.
Ilustrasi prinsip penglihatan stereo - titik 3D merah berada dalam kedudukan yang berbeza pada gambar kiri dan kanan.
Perbezaan kemudian dapat dikaitkan dengan kedalaman masing-masing titik ini menggunakan kedalaman hubungan berikut = fokus * garis dasar / kelainan, di mana kedalaman dan garis dasar dinyatakan dalam unit yang sama, dan fokus panjang dan kelainan dinyatakan dalam jumlah piksel.
Hasil perhitungan berupa peta kedalaman 176 × 90 piksel, yang mana nilai setiap piksel sesuai dengan kedalaman dalam meter. Peta kedalaman dimuat semula pada 30 Hz.
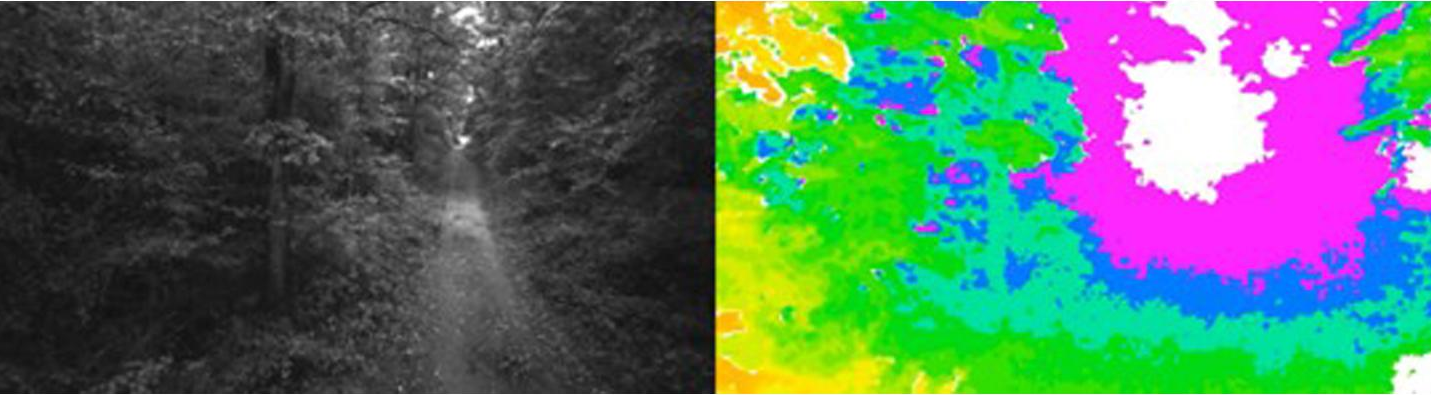
Contoh gambar yang dirakam oleh kamera kanan sistem penderiaan ANAFI Ai (kiri) dan kedalaman yang sesuai yang diperoleh menggunakan pencitraan stereo (kanan). Peta warna berubah dari merah (Lebih dekat) ke ungu (Lebih Jauh) - putih bermaksud Out of Reach.
Hasil langsung dari ini adalah bahawa kedalaman yang diukur dengan kaedah ini diskrit, kerana perbezaan hanya dapat mengambil nilai diskrit (jumlah piksel). Titik 3D yang terletak cukup jauh dari sistem persepsi dan mewujudkan perbezaan teori kurang dari satu piksel akan dianggap tidak terbatas, kerana perbezaan diskrit sebenar yang sesuai akan sama dengan 0. Ketepatan kaedah perbandingan stereo berkurang dengan jarak yang semakin meningkat, walaupun ada adalah kaedah yang dapat mengurangkan fenomena ini dengan mencapai persampelan subpixel.
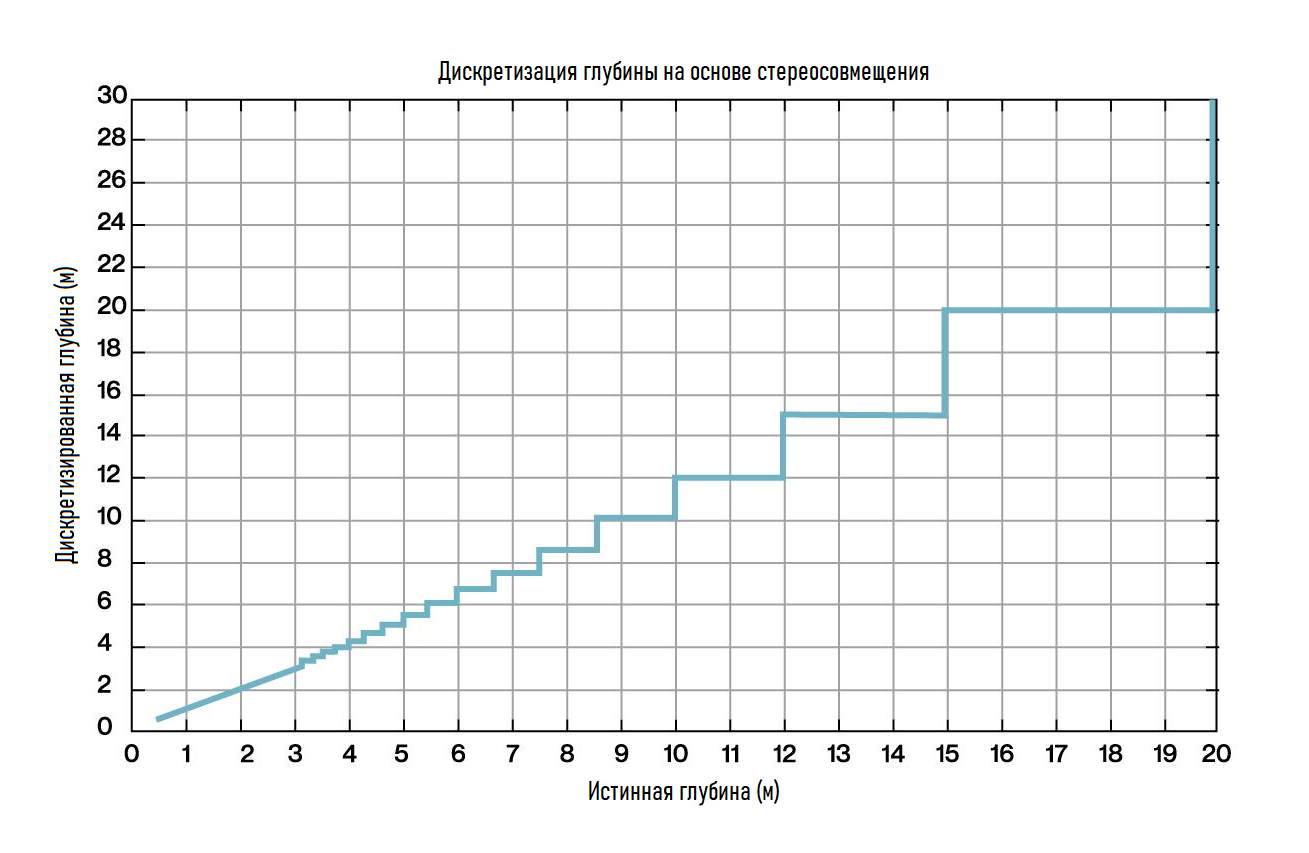 Kedalaman diskrit yang diukur dengan "penjajaran stereo" berbanding "kedalaman benar".
Kedalaman diskrit yang diukur dengan "penjajaran stereo" berbanding "kedalaman benar".
Selain itu, perbezaan berbeza apabila kedalaman menghampiri sifar. Oleh kerana bilangan piksel dalam gambar terhad, nilai jurang juga terhad. Akibatnya, terdapat kedalaman minimum di mana sistem persepsi buta. Kedalaman minimum ini ialah 36 cm untuk ANAFI Ai.
Tentang Kalibrasi: Setiap sepasang kamera stereo dikalibrasi kilang untuk mengukur perbezaan kecil yang mungkin berlaku di antara kedua-dua kamera dan mengimbanginya dalam pengiraan kedalaman kapal.
Pengguna juga dapat mengkalibrasi semula sepasang kamera stereo menggunakan corak ujian yang disertakan dengan drone. Khususnya, pada tahap tertentu, drone dapat mengesan kemungkinan kesalahan penentukuran yang mungkin timbul semasa hidupnya. Dalam kes ini, perisian pesawat akan cuba menyesuaikan dan mengimbangi mereka, dan jika ini gagal, muncul pemberitahuan yang meminta anda mengkalibrasi ulang.
Kedalaman dari pergerakan
Pergerakan drone juga dapat digunakan untuk mengumpulkan gambar persekitaran dari sudut yang berbeza dan dengan itu menyusun kembali maklumat mendalam. Teknik ini disebut kedalaman dari gerakan, atau penginderaan monokular, kerana satu kamera bergerak cukup untuk mengumpulkan maklumat kedalaman.
Prinsip operasi mirip dengan stereo vision, tetapi bukannya membandingkan gambar persekitaran yang diperoleh oleh pemerhati yang berbeza pada masa yang sama, persepsi membandingkan gambar persekitaran yang diperoleh oleh pemerhati yang sama pada masa yang berlainan. Sekiranya drone bergerak, gambar dari pemerhati unik ini akan diambil dari sudut yang berbeza. Mengetahui kedudukan di mana setiap bingkai diambil, adalah mungkin segitiga titik yang sesuai dengan ciri yang sama dalam gambar yang berbeza dan mengembalikannya ke 3D.
Output adalah awan titik tiga dimensi yang berisi hingga 500 titik untuk ANAFI Ai, yang dihasilkan pada frekuensi 10 Hz.
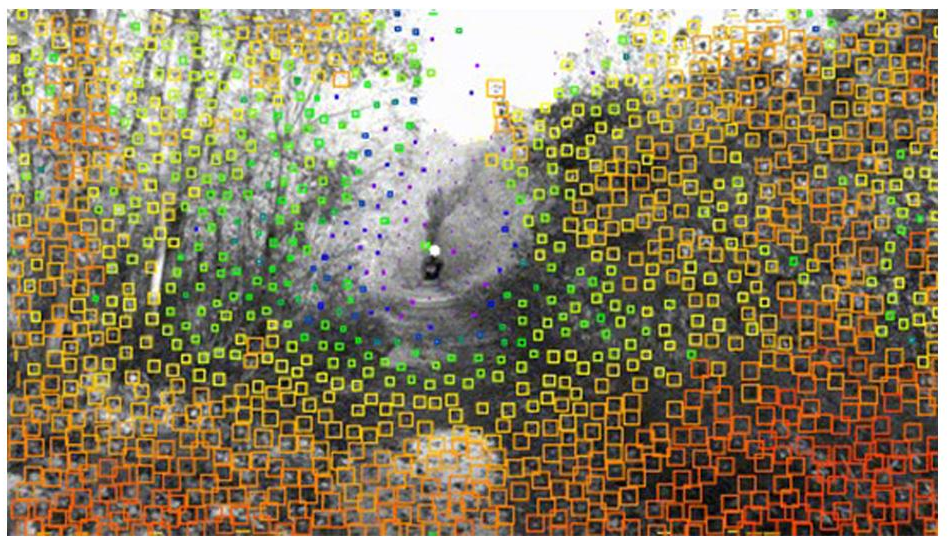 Contoh awan titik yang dibuat berdasarkan kedalaman dari gerakan - peta warna berubah dari merah (Lebih dekat) ke ungu (Lebih Jauh).
Contoh awan titik yang dibuat berdasarkan kedalaman dari gerakan - peta warna berubah dari merah (Lebih dekat) ke ungu (Lebih Jauh).
Algoritma ANAFI Ai Motion Depth biasanya menghasilkan lebih sedikit maklumat (awan titik jarang) daripada algoritma padanan stereo dan memerlukan drone bergerak untuk mengumpulkan maklumat. Selain itu, algoritma ini tidak dapat mengekstrak maklumat ke arah pergerakan yang tepat (sekurang-kurangnya untuk siaran langsung), kerana objek dalam gambar kelihatan hampir tidak bergerak ke arah ini (fokus pengembangan).
Namun, ia mempunyai julat pengesanan yang lebih baik (julat teorinya tidak terbatas) daripada padanan stereo.
Fill Grid
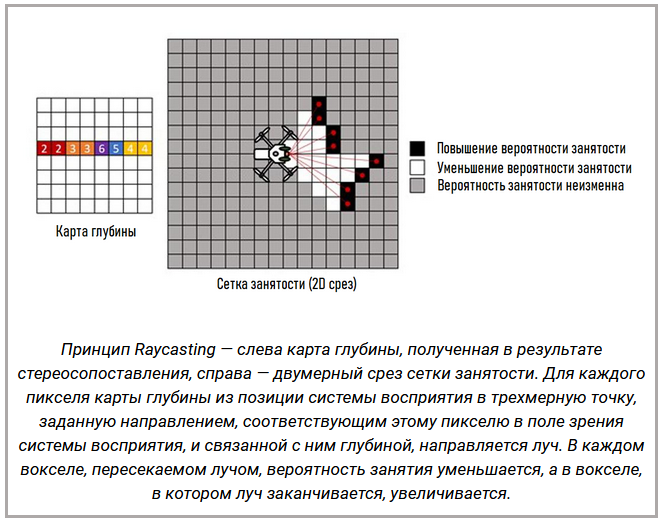
Maklumat kedalaman dari algoritma penginderaan stereo dan monokular diintegrasikan ke dalam Grid Isi. Jaring ini mengambil sampel persekitaran 3D ke dalam kubus 3D yang disebut voxel. Setiap voxel diberikan kebarangkalian untuk diduduki oleh halangan atau, sebaliknya, bebas dari halangan.
Algoritma transmisi sinar digunakan untuk menyatukan maklumat kedalaman ke dalam grid pengisi. Untuk setiap piksel peta kedalaman yang diperoleh sebagai hasil perbandingan stereo, ia ditukar menjadi titik tiga dimensi, dan untuk setiap titik awan titik - menjadi kedalaman yang diperoleh sebagai hasil gerakan:
- Sinar ditarik di grid pengisian dari kedudukan sistem persepsi ke posisi titik 3D.
- Kebarangkalian voxel yang mengandungi titik 3D ditempati meningkat.
- Kebarangkalian semua vokal yang dilintasi oleh sinar selain daripada yang mengandungi titik 3D diturunkan.
Oleh itu, grid bertindak sebagai penapis masa untuk maklumat kedalaman, menyerap sebarang potensi kebisingan dalam pengukuran kedalaman, dan sebagai ingatan pengukuran sebelumnya, yang memungkinkan anda dapat menavigasi persekitaran yang sukar walaupun tidak ada bidang pandangan 360 ° berterusan mengenai sistem persepsi.
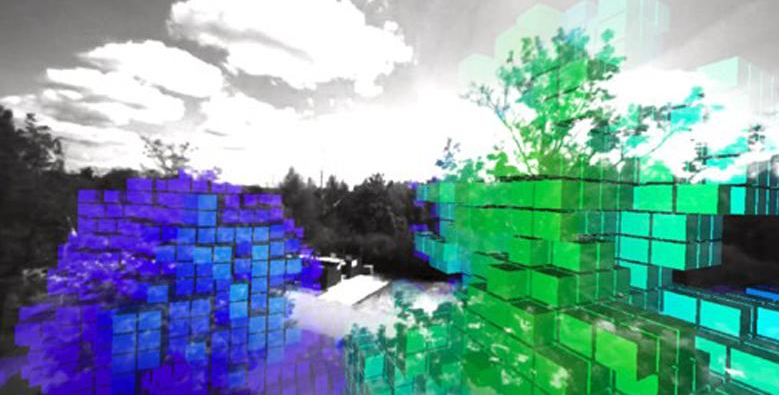 Contoh grid pengisi. Voxel ditumpangkan pada paparan kamera stereo kanan dengan tahap kepastian tinggi bahawa mereka sibuk, mulai dari merah (Dekat) hingga ungu (Jauh).
Contoh grid pengisi. Voxel ditumpangkan pada paparan kamera stereo kanan dengan tahap kepastian tinggi bahawa mereka sibuk, mulai dari merah (Dekat) hingga ungu (Jauh).
Grid pengisian adalah asas untuk algoritma perencanaan gerakan yang digunakan oleh ANAFI Ai untuk penerbangan secara automatik dan penghindaran halangan.
Penghindaran Halangan
Berkat pengetahuan tentang persekitaran 3D drone yang disimpan di grid pengisian, ANAFI Ai dapat mengelakkan halangan. Ini memberikan keselamatan tambahan yang signifikan untuk misi autonomi, tetapi juga berguna untuk penerbangan manual, terutama jika garis penglihatan antara juruterbang dan drone tidak terjejas.
Setiap 30 ms ANAFI Ai meramalkan jangkaan waktu pendek nominal pada masa akan datang. Ramalan ini disimpulkan dari pautan yang dikemukakan oleh pengguna, sama ada arahan penerbangan dari alat kawalan jauh, titik jalan untuk dilampirkan ke rencana penerbangan, atau lintasan input. Kemudian, menggunakan model drone dalaman yang disimulasikan, algoritma penjadualan semula mengira pembetulan sekecil mungkin pada lintasan nominal yang diramalkan ini yang menjadikannya bebas perlanggaran dan layak untuk drone tersebut.
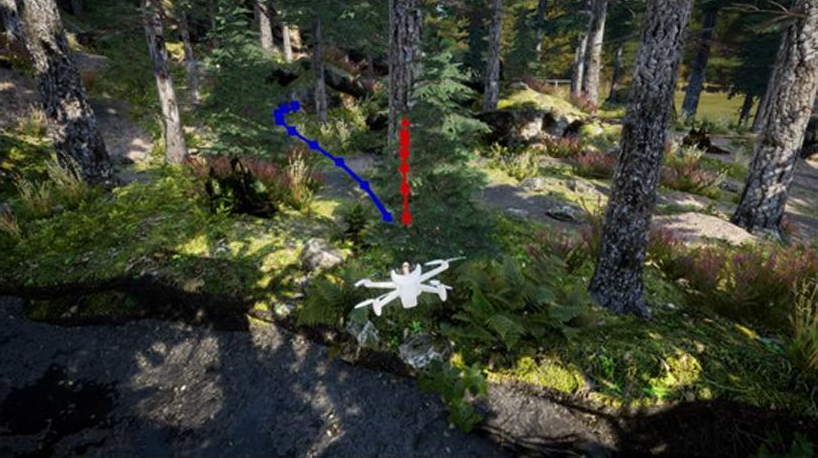 Contoh lintasan pelarasan yang dihitung oleh algoritma penghindaran halangan sebagai tindak balas terhadap perlanggaran lintasan rujukan dengan pohon.
Contoh lintasan pelarasan yang dihitung oleh algoritma penghindaran halangan sebagai tindak balas terhadap perlanggaran lintasan rujukan dengan pohon.
Sistem penghalang halangan ANAFI Ai dirancang untuk beroperasi pada kelajuan hingga:
- Penerbangan tingkat: 29 km / j
- Pendakian: 14 km / h
- Keturunan: 11 km / j
Prestasi penghindaran terhad pada hujan atau angin kencang, cahaya rendah, atau navigasi satelit terganggu. Selain itu, sebelum terbang, anda mesti memastikan bahawa lensa sistem penginderaan bersih.
Misi Penerbangan

Ciri-ciri Utama
Udara SDK (lihat. Bahagian SDK) membolehkan pemaju mengakses setiap sensor drone, kamera, antara muka sambungan dan fungsi mandiri. Oleh itu, mereka dapat menyesuaikan tingkah laku drone untuk membuat misi penerbangan. Setiap misi penerbangan mengandungi sekumpulan perilaku atau mod dasar:
- Di darat: Tingkah laku ketika enjin dihentikan, misalnya penentukuran sensor.
- Lepas landas: pelbagai strategi lepas landas
- Arahkan: tahan titik tetap
- Penerbangan: manual fungsi dan penerbangan autonomi
- Pendaratan: pelbagai strategi pendaratan
- Kritikal: setelah mengesan keadaan kritikal
Misi penerbangan khusus dapat membuat tingkah laku baru atau menggunakannya kembali dari misi lalai.
Harga dan ketersediaan
Permulaan penjualan drone ANAFI Ai dijadualkan pada September 2021. Maklumat harga belum didedahkan pada masa ini. Kami terus memantau maklumat yang masuk dan pasti akan mengemas kini bahagian ini di kemudian hari.

Dokumentasi untuk muat turun
Dokumentasi untuk berkenalan dengan produk dari pembangun:
Video
Ulasan teratas ANAFI Ai dari pemaju dan pengguna
Membongkar dan penerbangan pertama.
Uji penerbangan pesawat jarak jauh dengan sambungan 4G. Jumlah masa penerbangan adalah 29 minit dengan kelajuan penerbangan mendatar rata-rata 58 km / jam (16 m / s). Selama ini, drone mampu menempuh jarak 27 km. Anda juga dapat melihat bahawa penerbangan itu dilakukan dalam keadaan angin kencang, yang selalu diperingatkan oleh sistem drone.
.






