
- 1 Introduktion
- 2 Utvecklaren om maskinen
- 3 funktioner
- 4 paket innehåll
- 5 Specifikation
- 5.1 Drone
- 5.2 Kommunikation
- 5.3 Navigationssystem
- 5.4 Skycontroller 4
- 5.5 Aircraft Intelligent Battery
- ) 5.6 App
- 5.7 Kamera
- 5.8 Autonoma flyglägen
- 5.9 Cybersäkerhet
- 5.10 Papegoja SDK
- 6 Utseende
- 7 Kommunikation
- 7.1 4G
- 7.2 Max. räckvidd med 4G-anslutning
- 7.3 Wi-Fi
- 7.4 Livevideo
- 8 Kamera
- 8.1 48MP matris
- 8.2 Objektiv
- 8.3 Videolägen
- 8.4 Videokodning
- 8.5 HDR
- 8.6 Fotolägen
- 9 Hybridstabilisering
- 9.1 Huvudkamera gimbal
- 10 Fotogrammetri
- 10.1 Inspektion och kartografi
- 10.2 AI- och 4G -funktioner
- 10.3 Autonom flyg
- 11 Fotogrammetri eller lidar
- 11.1 Fotogrammetrifördelar
- 11.2 LIDAR -nackdelar
- 12 SDK
- 12.1 Air SDK
- 12.2 Ground SDK
- 12.3 OpenFlight
- 12.4 Sfinx
- 12.5 Olympe
- 12,6 PdrAW
- 12,7 modeller C. A. D.
- 12.8 MAVLink- och GUTMA -kompatibilitet
- 13 Största partnerekosystem för papegoja -drönare
- 13.1 Papegoja för alla affärsbehov
- 14 Cybersecurity
- 14.1 Dataskydd
- 14.2 FIPS140 -kompatibelt -2 och certifierad av CC EAL5 Secure Element
- 14.3 4G Secure Connection and Strong Authentication
- 14.4 Secure Initialization and Upgrade
- 14.5 Ställa in användarknappar på det säkra elementet
- 14.6 Digitalt signerade foton
- 14.7 Transparens och kontinuerlig säkerhetskontroll med bug bounty
- 15 Datahantering
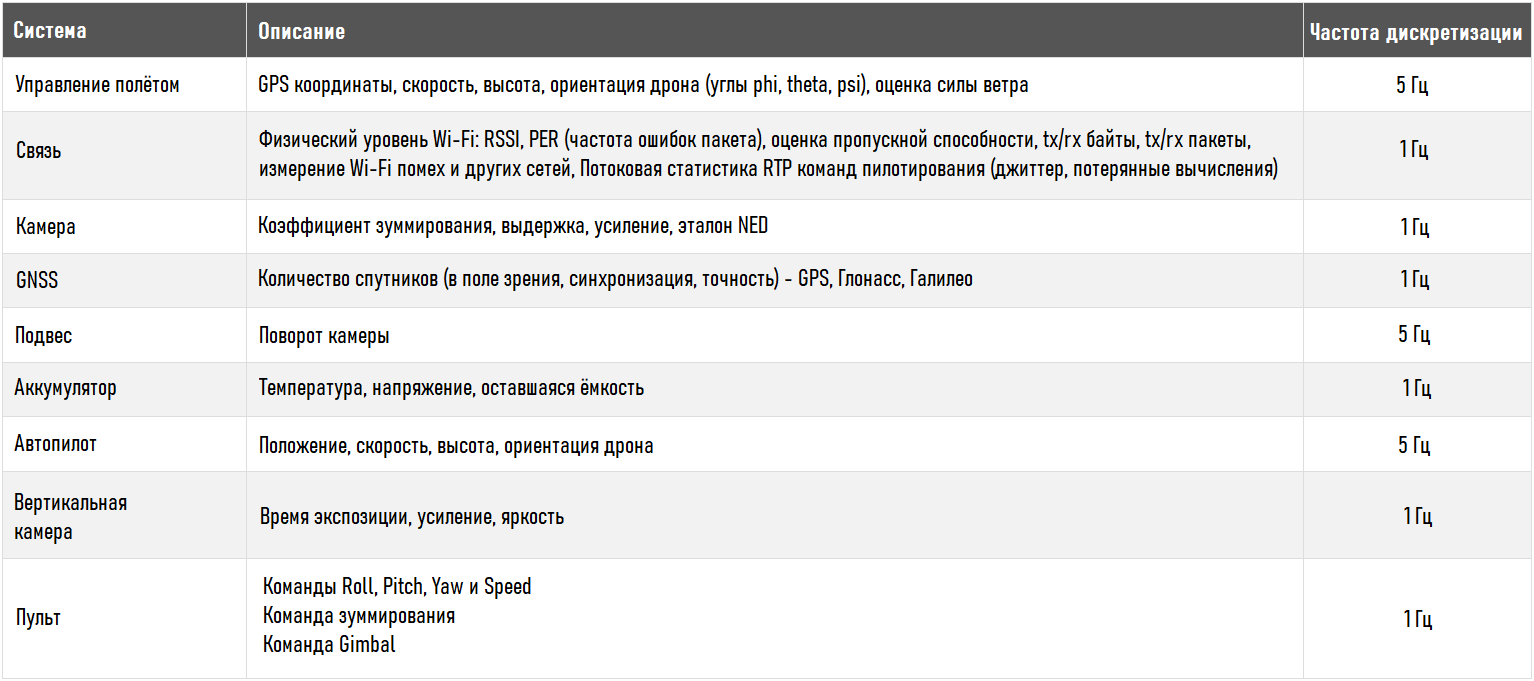
- 15.1 Insamlade data
- 15.2 Slutlig användning av insamlade data [1 26]
- 15.3 Förbättring av artificiell intelligens (AI)
- 16 Flygegenskaper
- 16.1 Aerodynamiska egenskaper
- 16.2 Ställdon och aerodynamik
- 16.3 Sensorer
- 16.4 Sensoregenskaper
- 16.5 Autopilot
- 17 Autonom flyg
- 17.1 Viktiga funktioner
- 17.2 Strategi för uppfattningssystem
- 17.3 Sensorer
- 17.4 Dubbel suspension
- 17.5 Rekonstruktion av miljön
- 18 flyguppdrag
- 18.1 Huvudfunktioner
- 19 Pris och tillgänglighet
- 20 Ladda ner dokumentation
- 21 videor
Introduktion [16 4]
Parrot Anafi Ai är en helt ny unik lösning från en välkänd fransk utvecklarekommersiellt bruk
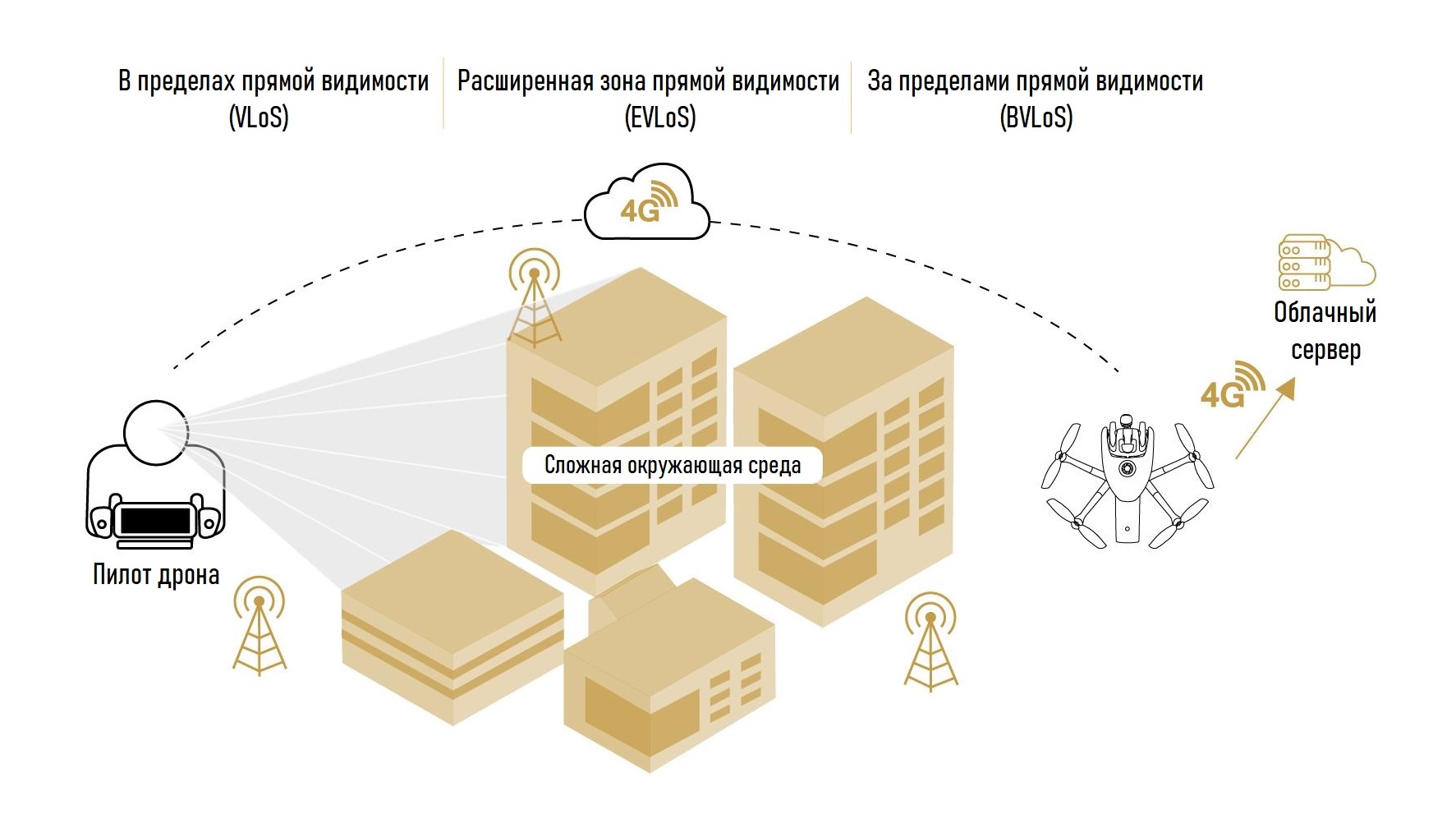
Anafi Ais telefonkort är den inbyggda 4G-modulen, tack vare vilken drönaren kunde använda den fjärde generationen mobilkommunikation som den huvudsakliga dataöverföringskanalen mellan drönaren och kontrollutrustningen, vilket faktiskt tar bort alla restriktioner för flygområdet och förutbestämmer driften av UAV utanför siktlinjen. När vi ser framåt noterar vi att maskinens deklarerade potential visade sig vara otroligt kraftfull och mer än någonsin motsvarar dess futuristiska utseende, som inspirerades av naturen för att skapa franska ingenjörer.
Utvecklaren om bilen
Martin Liné, marknadsdirektör på Parroterbjöd Parrot drones

Funktioner
Viktiga egenskaper hos Papegoja Anafi Ai:
- Vikt 898 gram
- Dags att flyga 60 sekunder
- Unik bärbar vikbar design
- Inbyggd 4G-kommunikationsmodul för full drone / kontrollutrustningsinteraktion utan begränsningar i alla miljöförhållanden
- Kompatibel med LTE över hela världen
- Utrustad med rundstrålande signalöverföringssystem (4 riktade antenner med reflektor (med förstärkning: 2,5 dBi / s antenner). Drönaren bestämmer det bästa paret av antenner beroende på dess orientering och position i förhållande till pilotens position)
- Utrustad med ett unikt omnidirektionellt bildsystem från omgivningen byggt på ett par stereoskopiska kameror monterade på en specialiserad gimbal med ett 330 -graders panintervall (från -120 ° till 210 °), arbetar tillsammans med ett intelligent optimeringssystem. flygvägar
- Anpassad för inomhusflygning
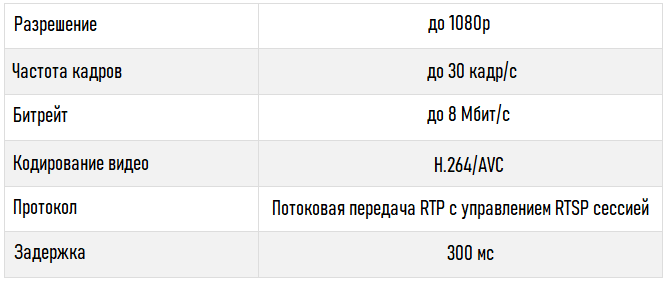
- Livevideoströmning i 1080p med låg latens (300 m / s) utan räckviddsbegränsningar någonstans i världen, med videobithastighet 12 Mbps
- Möjlighet att överföra filer till molnlagring direkt under flygning
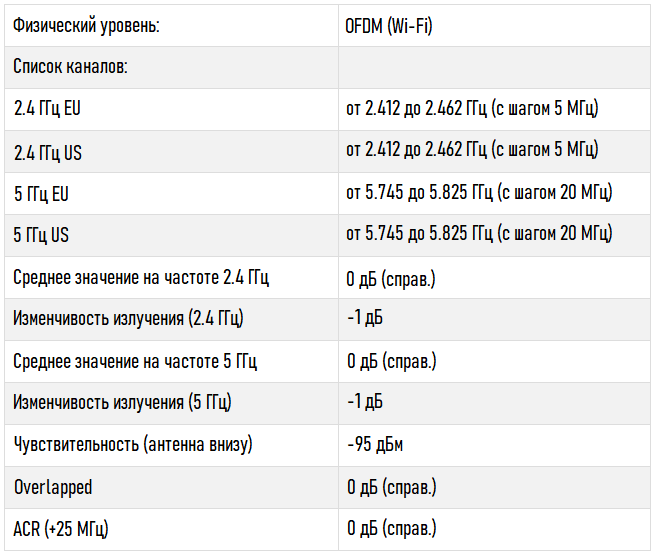
- Inbyggd Wi-Fi-kommunikationsmodul (Wi-Fi 802.11a / b / g / n) för fullfjädrad drönare / utrustningskontroll (som ett alternativt anslutningsalternativ)
- Slav. Wi-Fi-frekvensområde: 2,4 GHz / 5,8 GHz
- Max. räckvidd för FPV-flygning över Wi-Fi: 9 km
- Unikt automatiskt driftsläge för 4G / Wi-Fi-moduler, vilket gör det möjligt att, baserat på nätstopp, sömlöst växla från en kommunikationsteknik till en annan utan dataförlust
- Drone i skyddsklass IPX3
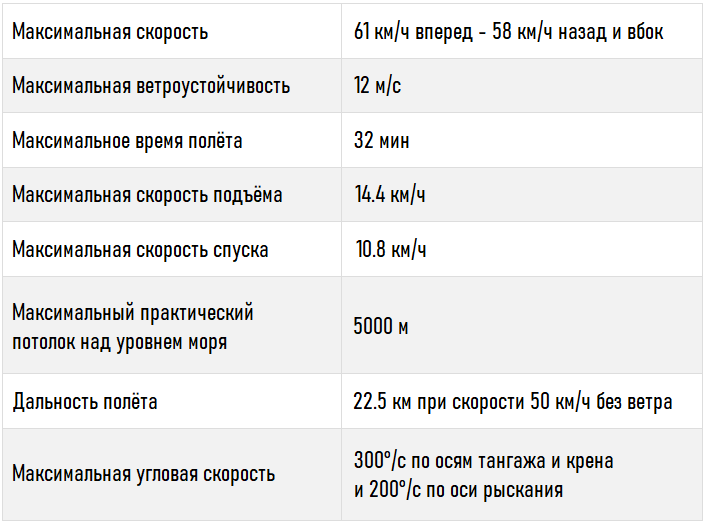
- Max. flygtid 32 min
- Max. horisontell flyghastighet 61 km / h
- Max. vindmotstånd: 13 m / s
- Max.tak över havet 5000 m
- 48MP 4K-kamera byggd på 1/2-tums CMOS-matris med en pixelstorlek på 0,8 μm; med inbyggt Bayer färgfilterarray
- Optiskt LD-ASPH-objektiv
- Hybrid 6-axlig bildstabiliseringssystem (3-axlig mekanisk 3-axlig digital EIS)
- Kontrollerbar arbetsområde Gimbal -90 ° till 90 °
- 6x förlustfri digital zoom (2x 4K / 4x FHD)
- Max. video bithastighet 200 Mbps
- Videoinspelningsformat HDR8 / HDR10
- Max. dynamiskt omfång 14EV
- P-loggfärgsprofil för efterbehandling
- 5 × automatiska flyg- och fotograferingslägen (fotogrammetri / flygplan / kameraman / smart RTH / fordon)
- Inbyggda platser för MicroSD och SIM-kort
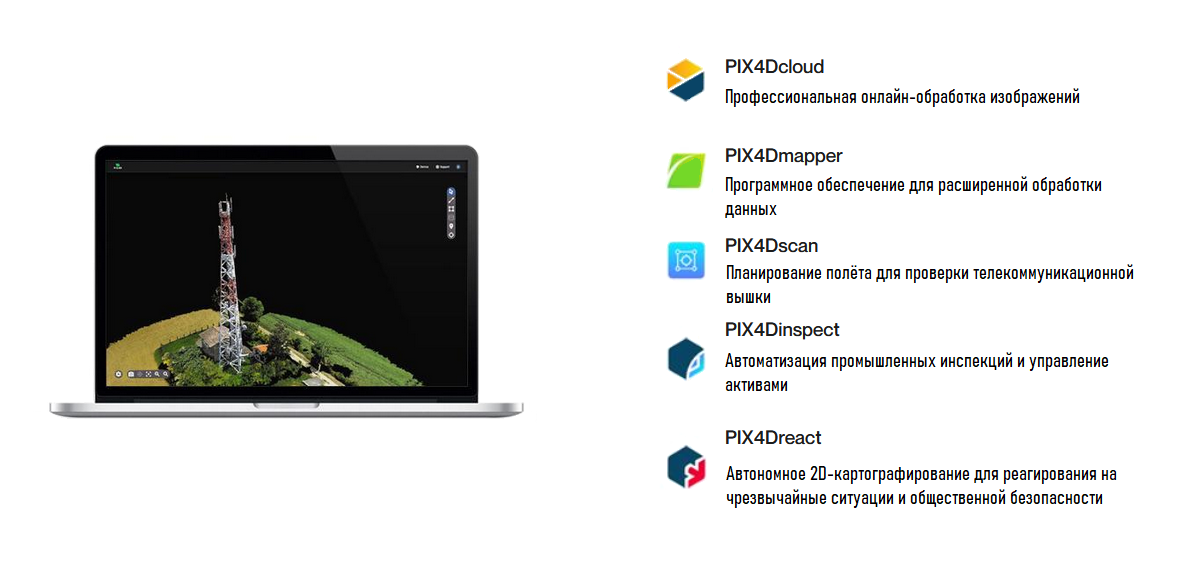
- Kompatibel med PIX4D Suite
- Fotogrammetriska flyglägen är tillgängliga i mob. FreeFlight 7-app och OpenFlight-programvara
- Flygplan med ett klick
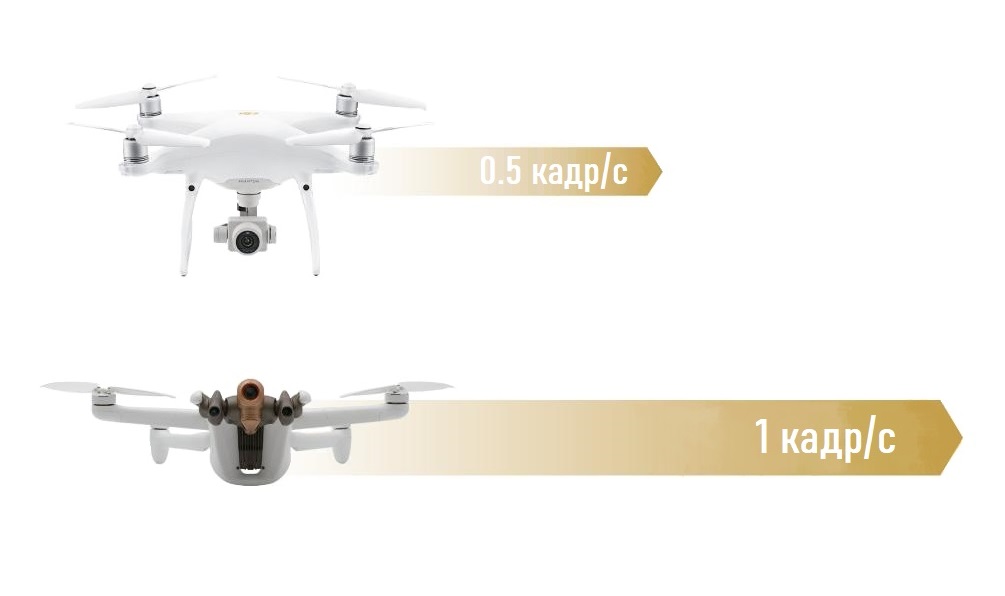
- 48MP 1 fps fotogrammetri: dubbelt så snabbt som konkurrenter
- Fotograferingsnoggrannhet: 0,46 cm / pixel. GSD vid 30m
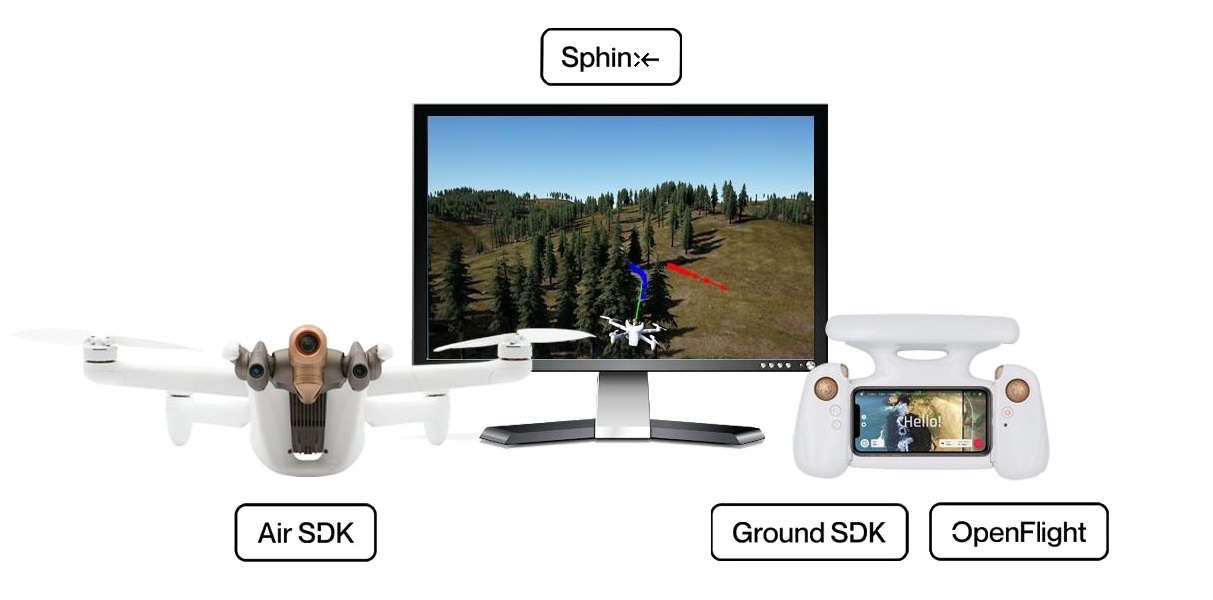
- Parrot SDK -stöd (med möjlighet att bädda in din kod i drönaren med Air SDK, skapa mobilapplikationer med Ground SDK, konfigurera en öppen källkodstation med OpenFlight, interagera med den moderna Sfinxen dronesimuleringsverktyg samt Python -skript med Olympe och video- och metadata -bearbetning med PdrAW)
- Kompatibel med tredjepartsprogramvara: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- ANAFI Ai Förordningar Europeiska unionens dataskyddsförordning (GDPR)
- Överlägsen datasekretess med inbyggt NIST FIPS140-2 Nivå 3 WISeKey Secure Element med Common Criteria EAL5-certifiering
- Video och kontroller skyddade med SRTP / DTLS enligt webRTC
- Ny Parrot Skyco bärbar styrutrustning ntroller 4
- Ny mobilapplikation Parrot FreeFlight 7

Paket
Utvecklaren erbjuder drönaren i en enda konfiguration, som kommer att innehålla:
- Drone ANAFI Ai
- Stel transportväska
- Kontrollutrustning Parrot Skycontroller 4
- 1 × Smart batteri
- USB-PD-laddare
- Reservpropellersats (2CW / 2CCW)
- Ledsagarkabel (USB-C till Lightning)
- 2 × Companion Cables (USB -C till USB -C)
- Kalibreringstabell

Specifikation
Flygplan

Kommunikation
Navigationssystem
Skycontroller 4

Intelligent batteri för flygplan
App

Kamera

Autonoma flyglägen
Cybersecurity
Papegoja SDK
Därefter, du kan bekanta dig med nyckelinformationen för Parrot Anafi Ai, som gör att du kan lära dig mer om maskinens deklarerade potential, samt vilka förbättringar som har genomförts i jämförelse med den kommersiella versionen av drönaren Parrot Anfi Thermal och andra drönare från ledande märken.
Utseende





Kommunikation
4G
ANAFI Ai inkluderar 4G -radiomodul (förutom radiomodulen Wi-Fi), som låter dig sända en videoström i 1080p-kvalitet med en maximal bithastighet på 12 Mbps, med en mycket låg latens (300 ms), utan begränsning i räckvidd och var som helst i världen.
Kompatibilitet
ANAFI Ai 4G -modulen stöder över 28 frekvensband som täcker mer än 98% av de frekvenser som distribueras över hela världen.
Automatisk nätverksväxel
Kvalitet och bandbredd för 4G- och Wi-Fi-nätverk mäts var 100: e ms för att anpassa streaming till nätverksförhållanden. Kombinerat med routingsalgoritmer upprätthålls anslutningen mellan drönaren och dess kontroller även när Wi-Fi är allvarligt avbruten. Således, när den effektiva bandbredden (användbar bandbredd) för Wi-Fi är under 1,5 Mbps, växlar systemet automatiskt till 4G.
För att begränsa förbrukningen av mobildata när piloten är inom räckhåll för drönarens Wi-Fi-nätverk utförs övergången från 4G till Wi-Fi också automatiskt utan att videoströmmen avbryts.
Max. räckvidd med 4G -anslutning
Videon från utvecklaren visar max. flygområde av Anafi Ai med 4G -anslutning i en riktning på en batteriladdning. Den totala flygtiden var 29 minuter vid en genomsnittlig horisontell flyghastighet på 58 km / h (16 m / s). Under denna tid kunde drönaren köra 27 km. Du kan också märka att flygningen genomfördes i starka vindförhållanden, vilket ständigt varnades av dronesystemet.
Implementerade algoritmer för optimering av videoströmmar
4G -överbelastningskontroll
Algoritm för överbelastningskontroll tillåter:
- Mät paketförlust över hela nätverkscykeln.
- Mät fördröjning (tur och retur).
- Justera bandbredden enligt dessa två parametrar.
Algoritmens slutmål är att maximera den tillgängliga bandbredden samtidigt som den lägsta möjliga latensen bibehålls. Denna algoritm implementeras på vart och ett av de gränssnitt som finns i drönaren, var och en med sina egna parametrar, optimerade enligt nätverket. Baserat på informationen från denna algoritm, tar länkhanteraren beslut om routing och aktivt gränssnitt.
Styrning av drönaren via 4G-anslutning
ANAFI Ai ansluter till fjärrkontrollen via 4G på mindre än 30 sekunder om drönaren är utanför Wi-Fi-området och på mindre än 15 sekunder om drönaren är inom Wi-Fi-området. Och även 4G -anslutning ger:
- Detektion och initiering av en anslutning baserad på VOIP SIP -protokollet.
- Använd en relayserver för att upprätta anslutningar över säkra nätverk.
Videoströmprestanda
- Latency: 300 ms.
- Säkerhet: video och kontroller är skyddade med SRTP / DTLS enligt webRTC.
- Antenner: 28 LTE -band från 700 MHz till 2,6 GHz.

Wi-Fi
Riktningsöverföringssystem
- ANAFI Ai har 4 riktningsreflektorantenner (med antennförstärkning: 2,5 dBi / s). Drönaren bestämmer det bästa paret antenner baserat på dess orientering och position i förhållande till pilotens position.
- Med en rekombinerad förstärkning på 3,5 / - 1,5 dBi i drönarens horisontella plan är ANAFI RF -förstärkningen Ai mycket enhetlig.
- Nedströms antennstrålning har förbättrats med 4 dB jämfört med ANAFI.
Extern design av högeffektsradion
Radios framsida maximerar effekten vid antennens bas med mycket bra linjäritet och känslighet (-94 dBm vid 6,5 Mbps) för att uppnå maximal FCC-begränsningseffekt.

Wi-Fi-tillförlitlighet
802.11-parametrar
låg bandbredd, låg latens, variation i mottagningsnivån på grund av hastigheten på drönare, lång räckvidd, förekomst av störningar. Dessa parametrar inkluderar aggregering, försök, MiMo -teknik (STBC), kontrollramdatahastighet och kopplingsförhållanden.
Intelligent störningsförebyggande
ANAFI Ai har en algoritm för borttagning av kanaler (2,4 GHz och 5 GHz dubbelband) vid störningar.
Anpassning och flödesövervakning
ANAFI Ai övervakar kontinuerligt statusen för sin 4 Hz -länk och kan detektera störningar. Detta låter dig dynamiskt optimera bandbredden och storleken på de överförda paketen. Det varnar också piloten om han befinner sig i en särskilt störande miljö eller är på väg att tappa signal.
Bandbreddsreduktion
Vid gränsen för dess intervall och om förhållandena tillåter det, kan ANAFI Ai växla till 10 MHz bandbredd för att förbättra sin känslighet med 3 dB och öka intervallet med 40%.

Radioindikatorer
Videosändning
Indikatorer för videolänk
Implementerade algoritmer för optimering av videoströmmar
Parrot Gen4 Streaming (4: e generationen)
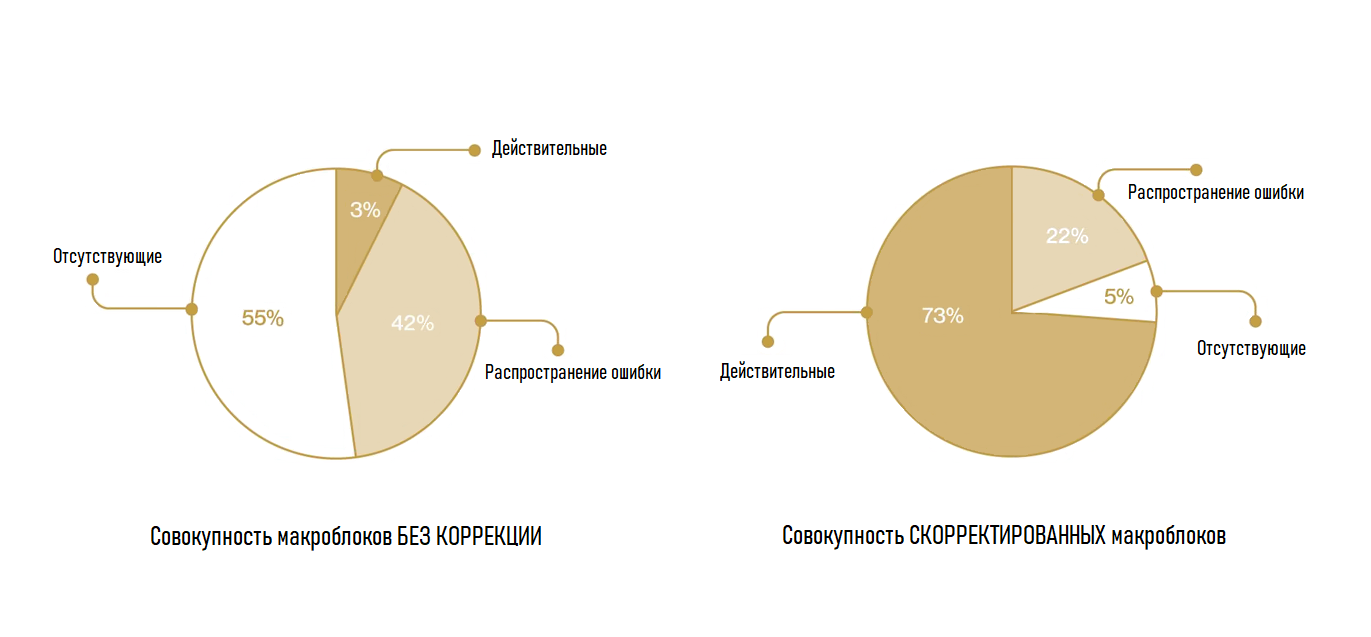
Denna algoritm minskar den visuella effekten av nätverksförluster och ger driftskompatibilitet alla avkodare, samtidigt som de ger en syntaktiskt komplett ström: de saknade delarna av bilden rekonstrueras som saknade delar, identiska med dem i referensbilden.
Fel finns alltså i de områden som är benägna att gå förlorade och inte gäller för hela bilden.
Graferna nedan visar framgångsgraden för makroblockavkodning med 5% nätverksförlust - med och utan ANAFI Ai avancerade strömningsfunktioner. Algoritmen säkerställer korrekt avkodning av 75% av makroblocken. De tillåter användaren att fortsätta sitt uppdrag utan att frysa skärmen eller förlora strömning.
Trängselkontroll
Algoritmen utvärderar också Wi-Fi- och radiomiljön för att förutse och undvika paketförlust och överbelastning av nätverk, vilket hjälper till att minska latens. Algoritmen är baserad på en uppskattning av kanalkapaciteten, beräknad utifrån datahastigheten och felfrekvensen vid det fysiska lagret; då påverkar det nätverkskodning och inkapslingsparametrar.
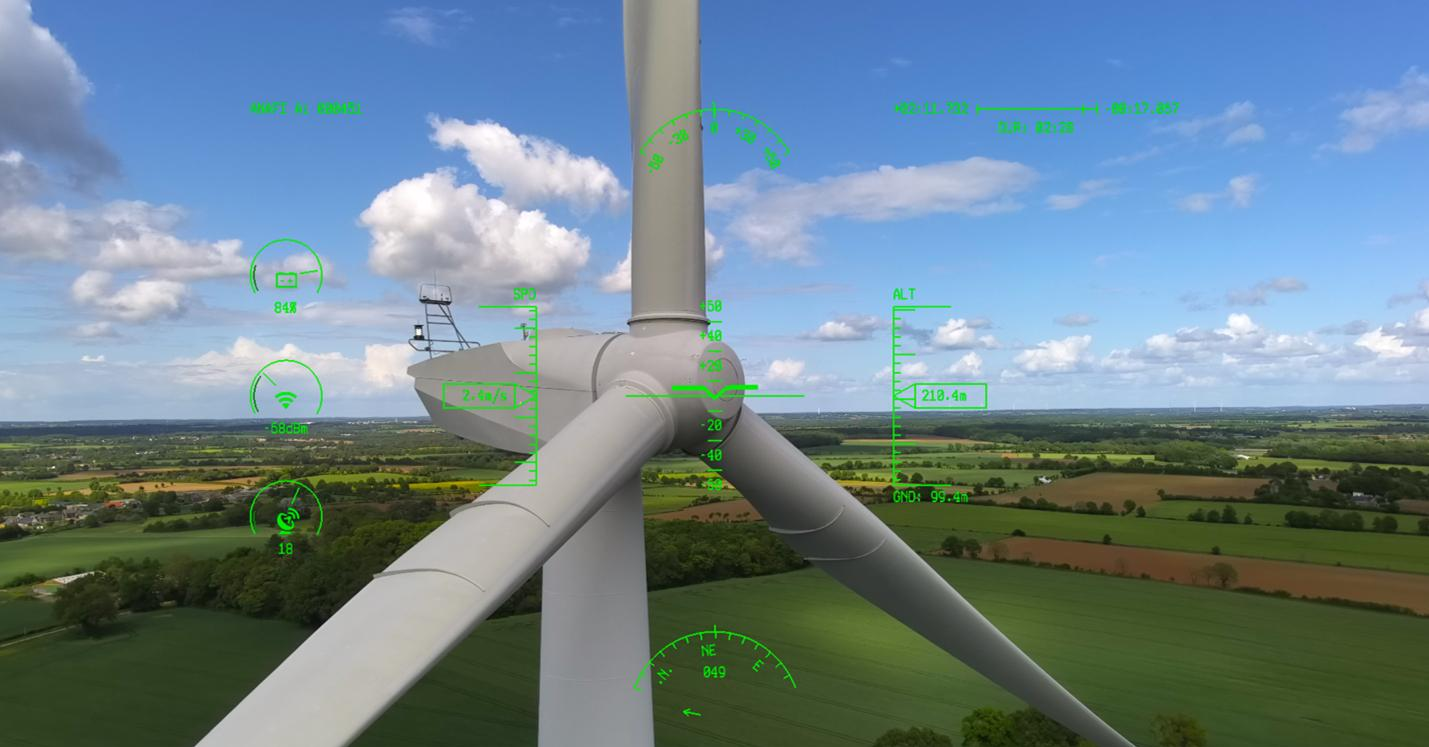
Metadata
Metadata överförs med videoströmmen. I synnerhet innehåller de drone -telemetrielement (position, höjd, hastighet, batterinivå, etc.) och videomätningar (kameravinkel, exponeringsvärde, synfält, etc.).
Synkronisering av bilder och öppna metadata utför funktionerna för exakt positionering på kartan, spårning av flyginstrument i HUD eller möjliggör förstorade verklighetselement.
Metadata ingår med hjälp av standardmetoder (RTP -rubrikförlängning); dataformatet som definierats av Parrot är öppen källkod: det är tillgängligt i ANAFI Ai SDK.
Kamera

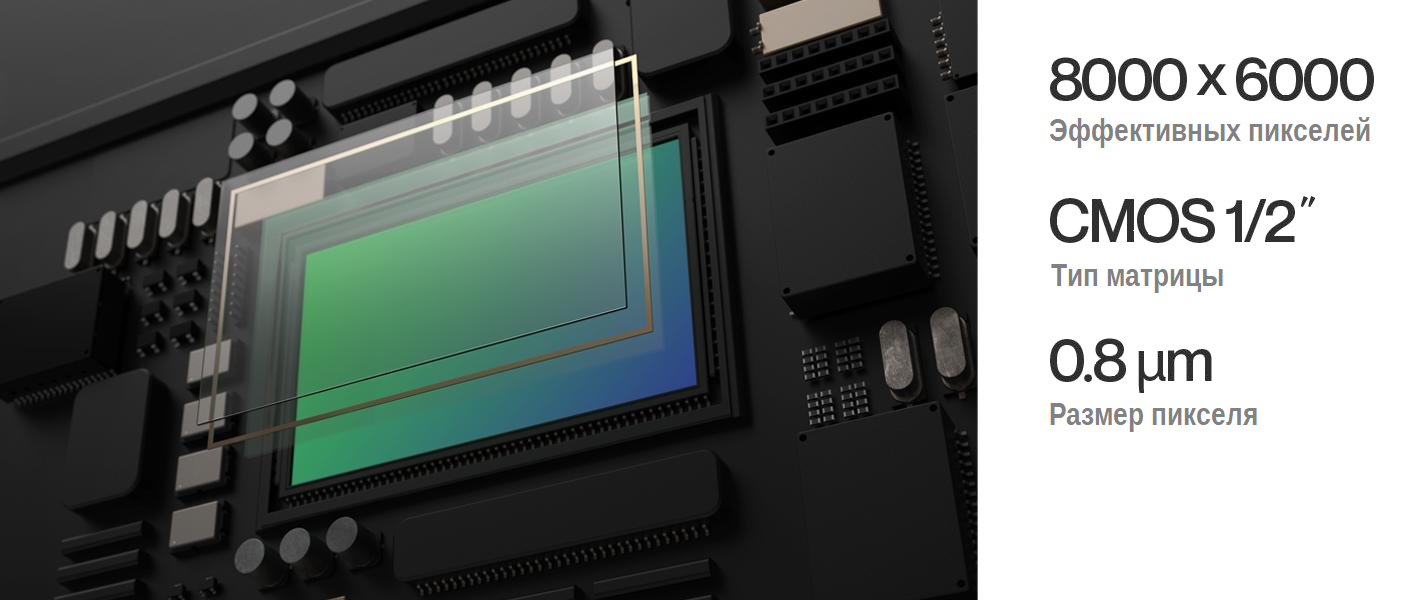
48MP sensor
ANAFI Ai -matris innehåller ett stort antal megapixlar för detaljerad flygfotografering.
Den använder Quad Bayers teknik för färgfilterarrangemang, där grupper om 4 intilliggande pixlar har samma färg. Således kan HDR-tagning i realtid erhållas i både foto- och videolägen genom att lägga till signaler från fyra intilliggande pixlar.
Dess dynamiska omfång är 4 gånger högre än för vanliga Bayermatriser. Även komplexa scener kan filmas med minimal markering eller förlust av skuggdetaljer.
Lins
ANAFI Ai -objektivet har utvecklats speciellt för papegoja. Den kombinerar 6 asfäriska element och är optimerad för att minska optisk flare. Detta objektiv ger 68 ° HFoV i standardvideoläge och 64,6 ° HFoV i standardfotoläge.

Videolägen
ANAFI Ai tar jämn 4K-video med 60 bilder per sekund, inklusive P-Log, och även HDR10 4K video med upp till 30 bps. Tabellen nedan visar alla ANAFI Ai -videolägen.

Videokodning
Användare kan välja mellan H.264 (AVC) och H.265 (HEVC).
Alla upplösningar använder följande pixelformat:
- YUV420p (8-bpc BT.709 färgutrymme) för standardläge och HDR8.
- YUVJ420p (8 bitar / komponent, fullt utbud - BT.709 färgutrymme) för P -log -stil.
- YUV420p10 (10bpc BT.2020 färgutrymme) för HDR10 -inspelning, endast H.265.
HDR
Vid inspelning av video i HDR8 och HDR10 täcker ANAFI Ai ett dynamiskt intervall på 14 EV. HDR10 -formatet erbjuder en maximal ljusstyrka på 1000 nits och ett färgdjup på 10 bitar. Det ger en miljard färgomfång mot 16 miljoner för standarddynamik. Jämfört med HDR8 ger HDR10 bilder mer än dubbelt så ljusa med en motsvarande ökning av kontrasten. HDR8 kan visas på vilken standardskärm som helst, medan HDR10 är för TV -apparater och HDR10 -skärmar.
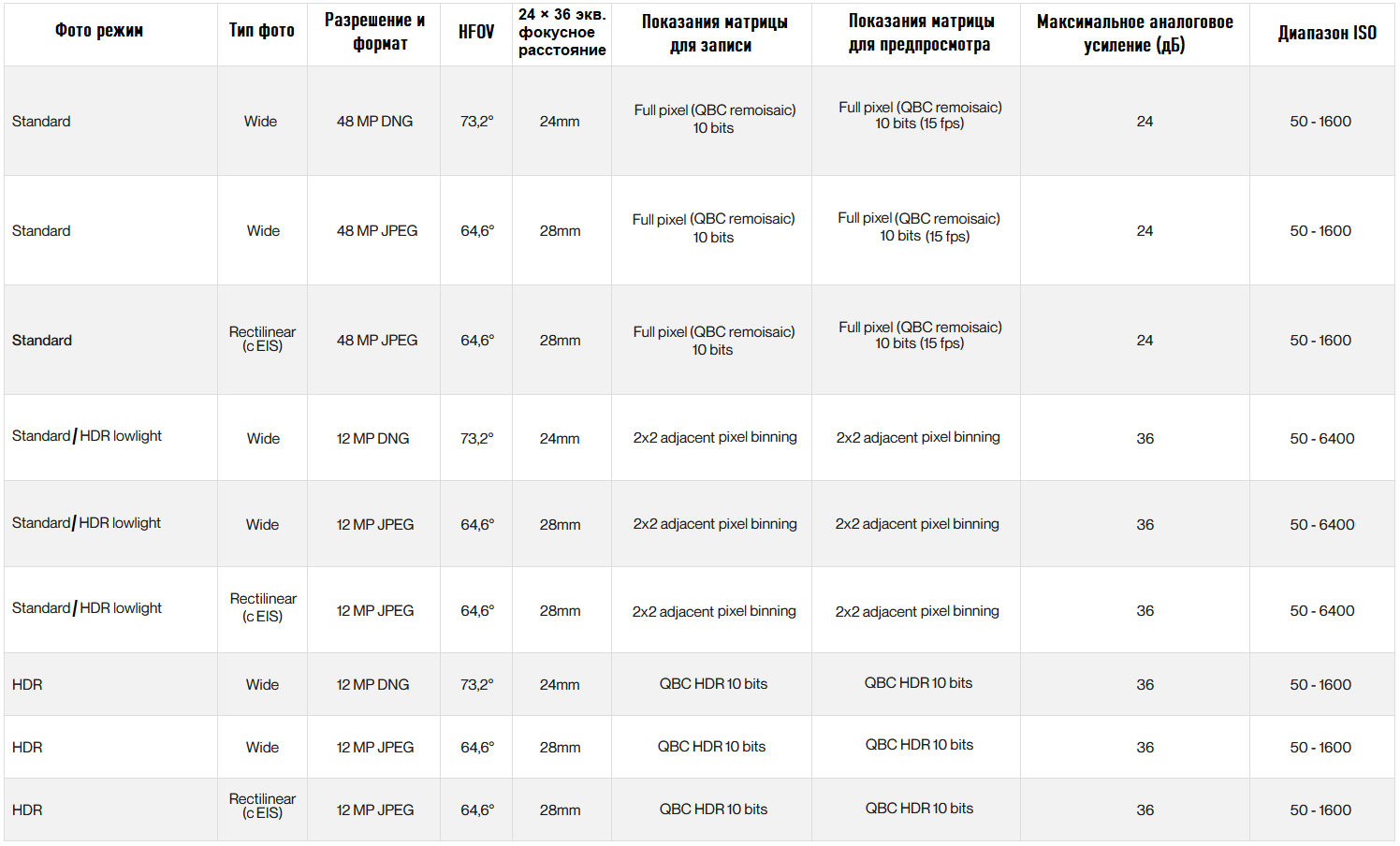
Fotolägen
Beskrivning av lägen
Lägesstyrningssektionen innehåller inställningar som påverkar antalet bilder som tas varje gång slutaren släpps.
Enkelt inspelningsläge
Standardläge för enkel inspelning. Efter varje slutartid bearbetas den tagna bilden omedelbart av systemet.
Bracketing -läge
Användare kan ta en serie på 3, 5 eller 7 bilder med olika exponering för varje bildruta. Följande förinställningar är tillgängliga:
- [-1 EV, 0, 1 EV] (standardinställningar)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

Burst -läge
Burst -läge gör att användaren kan ta en bildserie på 10 bilder på 1 sekund.
Panoramaläge
Panoramaläget innehåller fyra olika panoramabilder:
- Sfäriskt (360 °) är ett panoramaläge med tre alternativ för skjuta ett sfäriskt panorama: Sphere / Little Planet / Tunnel.
- Horisontell (180 °)
- Vertikal (109 °)
- Superwide - ny super bred sömnadsläge med 9 bilder (HFOV 110 °, rakt panorama)
För mer information om specifikationer för panoramaläge, se tabellen nedan:

Timelapse -läge
Med det här läget kan du ta bilder med följande fasta tidsintervall:
- 48MP: 1, 2, 4, 10, 30 eller 60 sekunder.
- 12MP: 0,5, 1, 2, 4, 10, 30 eller 60 sek.
GPS Lapse -läge
Detta fotoläge har utvecklats för inspektion och fotogrammetri. Det låter dig ta bilder med följande fasta avståndsintervall: 5, 10, 20, 50, 100 eller 200 meter.
Tabellen nedan visar stillbildsfångstlägen och upplösningar, inklusive sensoravläsningsläge:
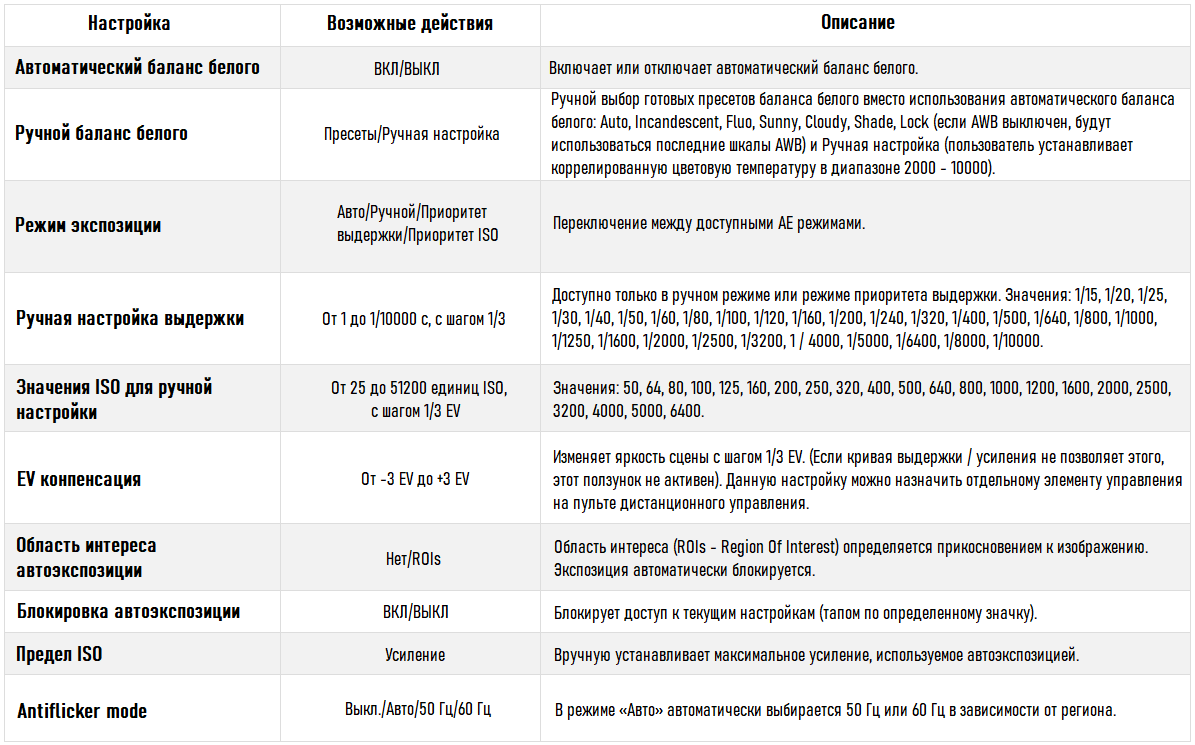
Inställningar
I följande tabell listar tillgängliga inställningar för varje läge.
6x zoom
Zoom är tillgängligt i alla foto- och videolägen. Kombinerat med en 48 megapixelsensor ger exakta skärpningsalgoritmer högupplösta bilder även när du använder 6x digital zoom. ANAFI Ai -användare kan nu se 1 cm detaljer från 75 m bort. Det höga pixeltalet gör också att 4K -video kan beskäras till 1080p utan förlust av kvalitet.

Hybridstabilisering
ANAFI Ai har den mest exakta stabiliseringen på mikro UAV -marknaden.
Den kombinerar kombinerad stabilisering:
- 3-axlig mekanisk (3-axlig mek. Gimbal)
- Elektronisk 3-axlig (EIS)
Mekanisk stabilisering stabiliserar kamerans pekaxel oavsett drönarens flygposition. Elektronisk bildstabilisering korrigerar mikrovibrationseffekter för frekvenser över 100 Hz, som den mekaniska drivenheten inte kan hantera.
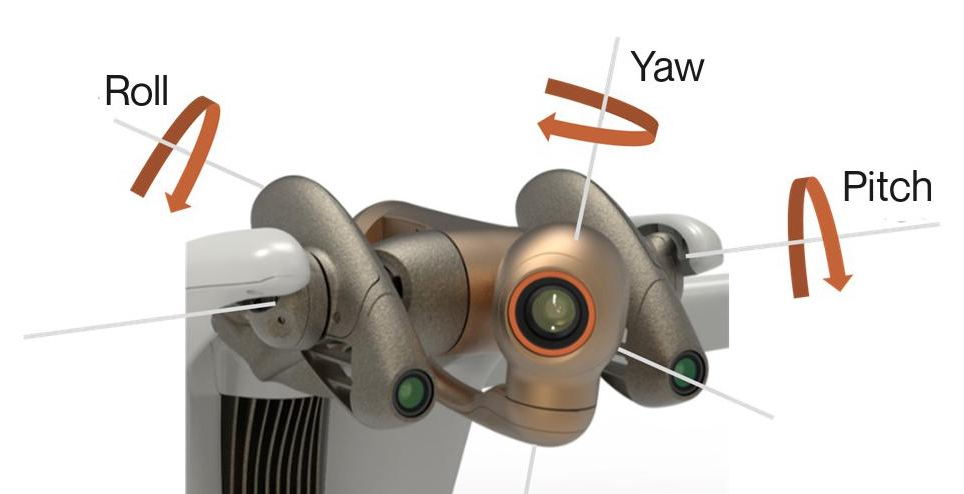
Huvudkamera gimbal
Mekanisk stabilisering gör att du kan stabilisera och orientera den horisontella axeln för kameravyn i alla 3 axlar.
 3 rotationsaxlar mek. upphängning av huvudkameran ANAFI Ai.
3 rotationsaxlar mek. upphängning av huvudkameran ANAFI Ai.
Huvudfunktioner
- Mekanisk treaxel för huvudkamera
- Vertikal förskjutning 292 °, synfält -116 ° till 176 ° ] bildstabilisering (Roll, Pitch och Yaw).
- Metoden består i att tillämpa en geometrisk transformation av bilden. Geometrisk transformation är förknippad med tidsstämpel och exakt position tack vare IMU.
- Geometrisk transformation tillämpas på varje bild i enlighet med optisk distorsion, vibrationer och rörelser för den uppmätta kameraenheten.] unik möjlighet på marknaden mikro-UAV.

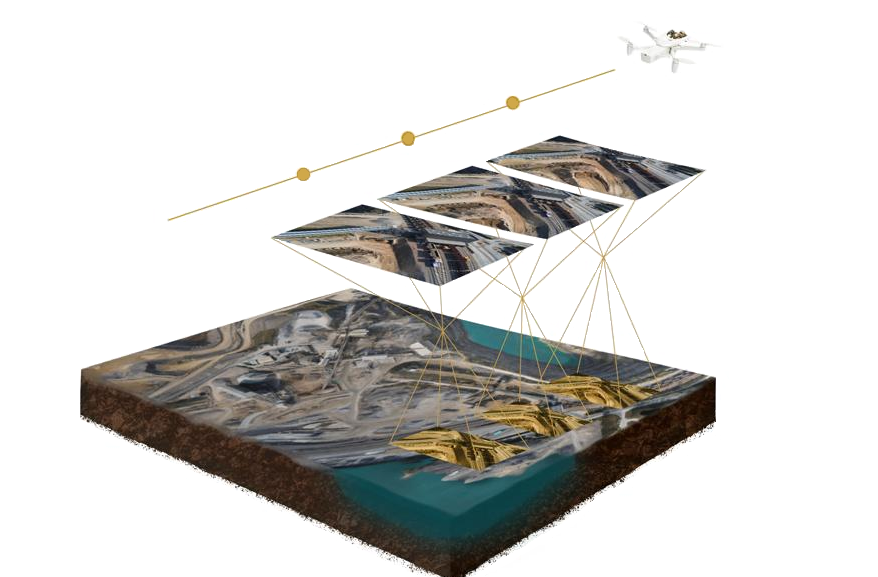
Fotogrammetri
Flygfotografering med obemannade flygbilar förändrar hur specialister utför inspektioner och lantmäteri. Fotogrammetri metoder används för att bearbeta bilder som samlats in av UAV för att skapa 2D- och 3D -modeller, som senare tillåter kunder att schemalägga underhåll av de undersökta objekten i tid.
4G ger oöverträffad tillförlitlighet för drönardatalänken. Användare kan använda UAV över stora områden, nära metallkonstruktioner, byggnader, utan rädsla för kommunikationsförlust.
Inspektion och kartläggning
Genom att kombinera AI för ANAFI Ai -drönaren med PIX4Dinspect -onlineplattformen kommer användarna att kunna utföra inspektioner snabbare och mer effektivt än någonsin tidigare. eller. Maskininlärningsalgoritmer känner igen antenner på celltorn, bestämmer deras storlek, höjd, lutning, azimut och vertikalitet.
Klicka på bilderna nedan för att se demo -3D -modeller genererade av ANAFI Ai.
Exempel # 1

Exempel # 2
Matris i klassen
]Kameran på ANAFI Ai-drönaren är utrustad med en 48MP 1/2-tums CMOS-sensor byggd med Quad Bayer-färgfilterteknik, vilket är mer lämpligt än någonsin för inspektion och fotogrammetri. Matrisen som används gör att du kan få detaljerade bilder med ett brett dynamiskt omfång.
Högupplösta foton
ANAFI Ai kan generera 48 megapixel stillbilder, och fånga alla detaljer i hög upplösning och skapa ett punktmoln med hög densitet.
Betydande skärpa
Inspektionsuppdrag kräver möjlighet att identifiera små detaljer som serienummer, kontakter, rostfläckar och begynnande sprickor.
Brett dynamiskt omfång
10 stopp dynamiskt omfång i standardläge, 14 stopp i HDR -läge. Optimal bildgradering är avgörande för att skapa konsekventa molnpunkter och högkvalitativa 2D- eller 3D -rekonstruktioner.
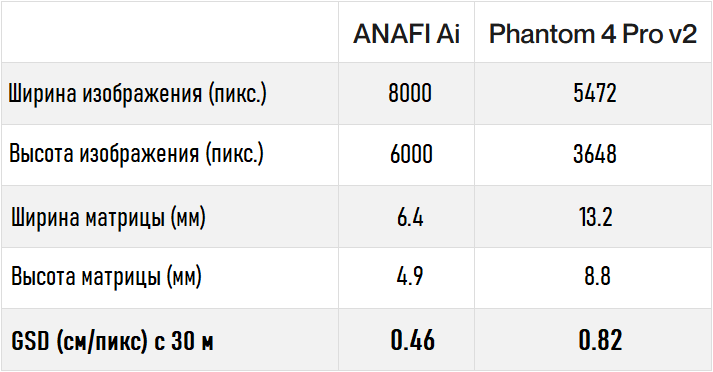
55% mer detaljer än 1-tums sensorer
48MP 1/2-tums Quad Bayer-sensorn i ANAFI Ai-drönaren är skarpare än 20MP 1-tums sensorerna som används i ett antal moderna professionella drönare. Följande bilder från taket ANAFI Ai och DJI Phantom 4 Pro V2.0 på samma höjd visar tydligt detta faktum.

Perfekt för inspektioner
ANAFI Ai-gimbalen innehåller ett 6-axligt hybrid (mekaniskt elektroniskt) stabiliseringssystem som kompenserar för fluktuationer och säkerställer bildskarphet. ANAFI Ai -kameran har ett justerbart intervall från -90 ° till 90 °, vilket gör den till ett idealiskt luftburet instrument för att se undersidan av en brobas.
Kontrollerbar lutning ± 90 °
Noggrannhet
ANAFI Ai tillåter användare att uppnå en GSD på 0,46 cm / px från en höjd av 30 m, vilket innebär relativ noggrannhetsplanimetri upp till 0,92 cm.
För jämförelse ger DJI Phantom 4 Pro V2på samma höjden GSD på endast 0,82 cm / px. Med andra ord kan ANAFI Ai kartlägga samma mål och flyga mer än 1,5 gånger högre än Phantom, med motsvarande detaljnivå.
AI- och 4G -funktioner
En app. Alla flygplan
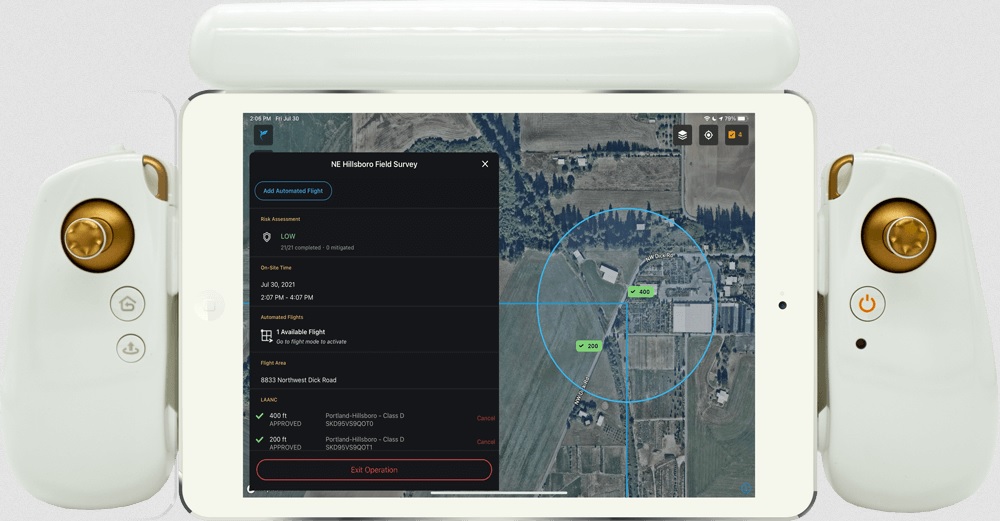
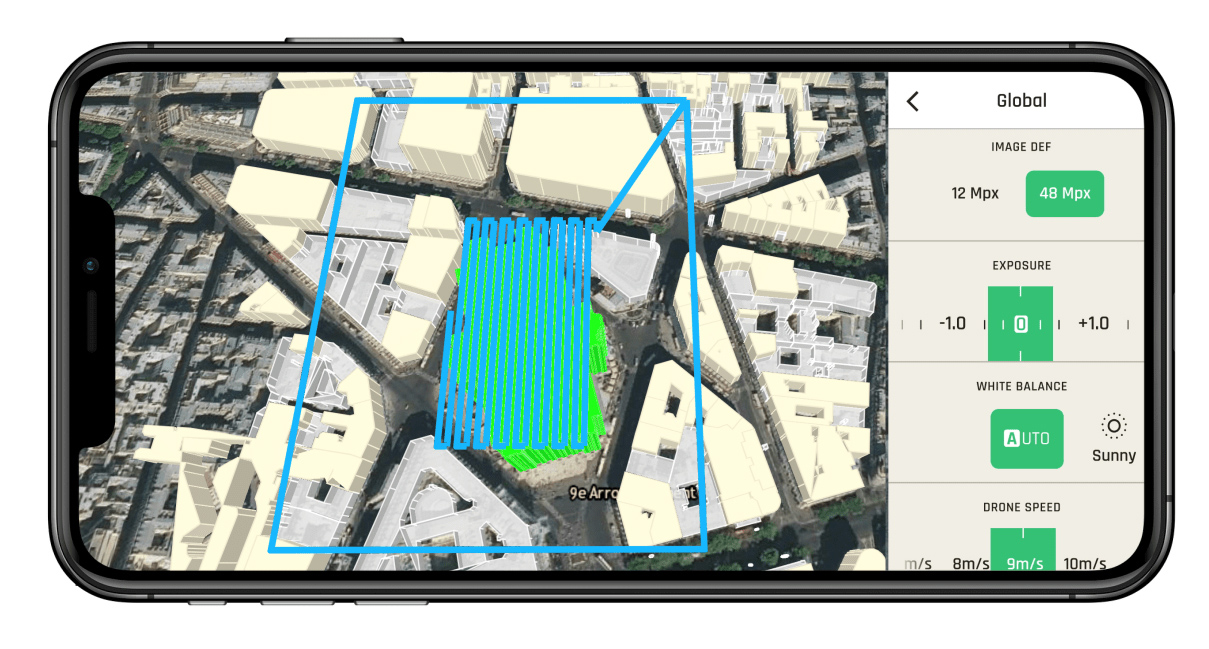
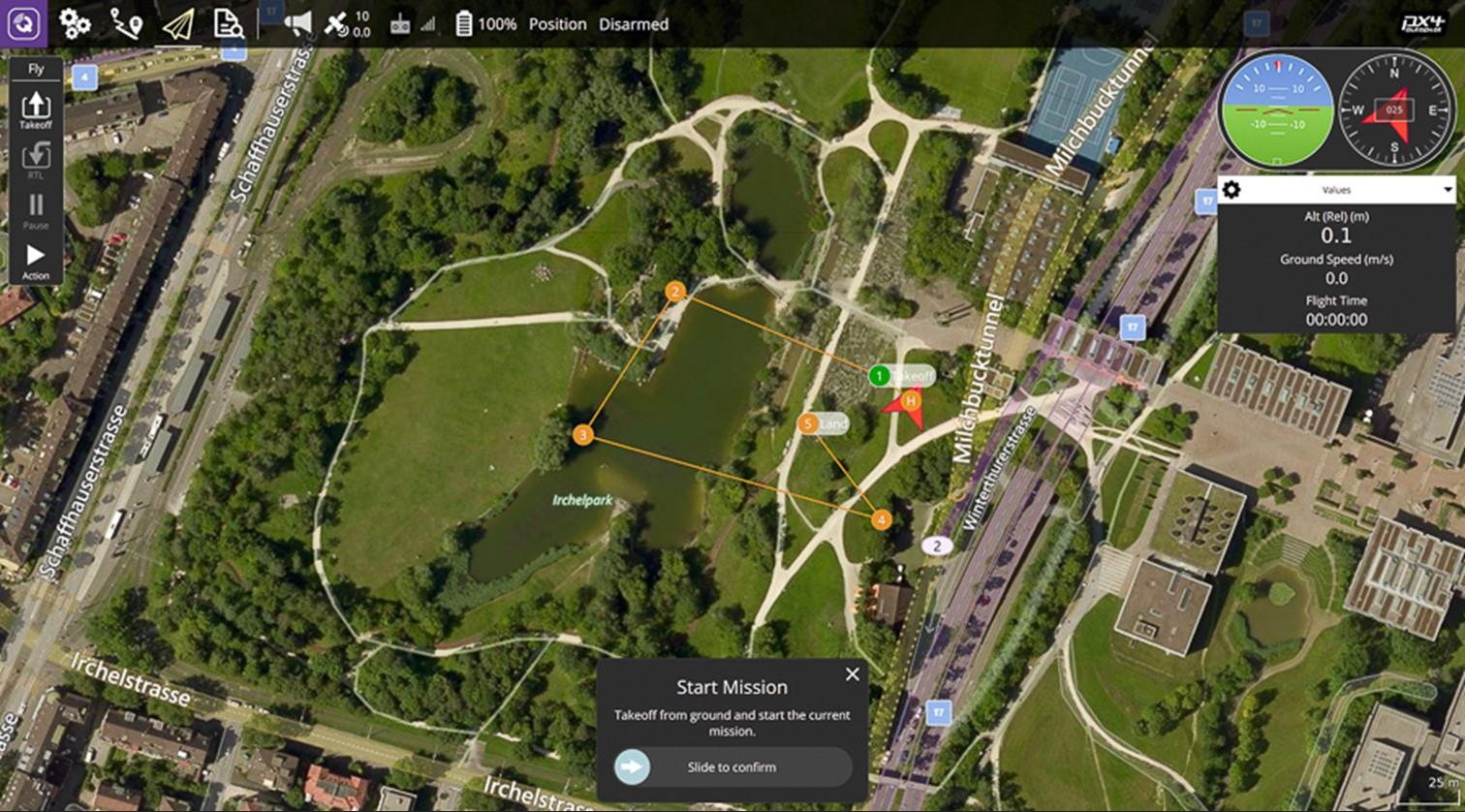
Potentialen i FreeFlight 7 -mobilappen gör att användaren kan starta alla undersöknings-, inspektions- och fotogrammetriuppdrag.

Tillgängliga fotogrammetriska flyglägen
Följande fotogrammetriska flyglägen är nu tillgängliga i FreeFlight 7 -mobilapplikationen:
- Grid
- Dubbelnät
- Сircular
Skapa en flygplan med ett tryck
Ett tryck på FreeFlight 3D interaktiva karta är allt du behöver för snabb skanningsbyggnad. Artificiell intelligens bestämmer automatiskt de optimala flygparametrarna och banan. 48 MP-bilder med exakt geo-referens av ANAFI Ai-sensorer (IMU, GNSS och Flight Time) möjliggör exakt 3D-rekonstruktion.
 Automatisk flygplan skapad med ett tryck i 3D -landregistret.
Automatisk flygplan skapad med ett tryck i 3D -landregistret. - FreeFlight 7: s kartografiska bakgrund är från ArcGIS -programvara. 3D -byggnadsrepresentationen är baserad på OpenStreetMap -data som täcker städer runt om i världen.
- Visualiseringssystem garanterar säkerheten för en given flygplan: användarna behöver inte oroa sig för hinder. ANAFI Ai undviker dem autonomt.
Autonom flygresa
ANAFI Ai rundstrålande sensorsystem, baserat på stereoskopisk syn, orienterar sig automatiskt i färdriktningen.

Drönaren detekterar hinder som ligger 30 meter bort. AI -teknik bygger och uppdaterar ständigt infillnätet medan en given flygplan genomförs. Det representerar drönarmiljön i voxlar.
Algoritmerna bestämmer den bästa banan för att undvika att kollidera med hinder, medan drönaren förblir fokuserad på sitt mål: det tilldelade flyguppdraget.

4G -anslutning
ANAFI Ai är den första kommersiella mikrodronen utrustad med en 4G -modul. Den täcker över 98% av de frekvenser som används över hela världen.

Undersökning av högspänningsledningar. Skott med ANAFI Ai, redigerat med Pix4Dmatic. Scenstorlek: 4060 × 60 × 70 m. Antal bilder: 2172. GSD: 1,3 cm / pixel. Höjd: 90 m. Överlappning fram / sida: 90% / 65%.
Drönaren kan sömlöst växla från Wi-Fi till 4G och vice versa, vilket ger den mest pålitliga anslutningen, vilket i sin tur garanterar:
- Möjligheten att utför BVLOS -flygningar
- Stabil anslutning även när du flyger i miljöer med hinder och byggnader
- Säker flygning i högljudda miljöer
- Videolänkkvalitet 1080p @ 30 fps
- Direkt uppladdning av bilder till molnservrar

Optimering av flygtid
Enligt utvecklaren har betydande tidsbesparingar uppnåtts på grund av den höga prestanda för ANAFI Ai-bilden:
- 48MP gör att drönaren kan flyga mer än 1,5 gånger högre än drönare med 20MP 1-tums sensorer, samtidigt som den uppnår samma GSD. Med andra ord går högre höjd och snabbare uppdrag hand i hand.
- 1 bps fotografering: ANAFI Ai tar två gånger så snabbt som Autel EVO 2 och DJI Phantom 4 Pro V2.0.
4G-flygöverföring till PIX4Dcloud
Under processen att skapa en digital modell från flygfotografier av en drönare, överföra filer och bearbeta foton är två tidskrävande uppgifter. ANAFI Ai hjälper användare att påskynda sitt arbetsflöde. I synnerhet tillåter dronesystemet:
- Överför bilder till säkra servrar direkt under flygning med hjälp av drönarens 4G -anslutning.
- Börja omedelbart beräkna objekt i slutet av flygningen: ortomosaik, punktmoln, höjdmodeller och texturerat nät.
- Dela enkelt 2D -kartor och undersök kvalitets 3D -modeller med anställda och kunder.

PIX4D Suite -kompatibilitet
ANAFI Ai är nu fullt kompatibel med en unik uppsättning mobil-, stationära och molnfotogrammetriapplikationer som består av:
Fotogrammetri eller lidar
Varför välja fotogrammetri för undersökning och undersökning? Förutom tillgänglighet och användarvänlighet är fotogrammetri från luften det bästa valet när visuell tolkning av data krävs.
Fotogrammetriproffs
- Ger flera visualiseringar: ortomosaik, färgpunktsmoln, texturerat nät.
- Skapar ett moln av punkter med en högre densitet, som var och en innehåller en betydande mängd information (höjd, textur, färg).
- Överträffar LIDAR i noggrannhet för fotorealistiska 2D- och 3D -renderingar - LIDAR ger inte en hög nivå av kontextuell detalj.
LIDAR -nackdelar
- Kostar 100 gånger mer än en UAV med en RGB -matris.
- Databearbetningens komplexitet och eventuella tolkningsfel.
- Det är möjligt att lägga till färginformation, men det komplicerar processen.
- LIDAR genererar endast punktmoln och är avsett för specifika fall och situationer.
SDK
Parrot Software Development Kit är en uppsättning verktyg och programvara för utvecklare med öppen källkod. Sedan skapandet av den första drönaren A. R. Drone, företagets programvara för öppen källkod ligger till grund för utvecklarplattformar och verktyg, och Parrot
Utvecklaren klargör att alla SDK -resurser i företaget är tillgängliga gratis, utan registrering och spårning, på portalen " Papegoja Utvecklarportal"... Du kan också gå med i tusentals utvecklare på Parrot forum där du kan diskutera aktuella ämnen direkt med företagets ingenjörer.
Air SDK
Kör din kod på ANAFI Ai
Air SDK erbjuder en revolutionerande teknikarkitektur för nedladdning och körning av kod direkt på ANAFI Ai. Utvecklare kan programmera specialdesignade flyguppdrag med tillgång till alla drönsensorer, anslutningsgränssnitt och autopilotfunktioner.
Air SDK ger tillgång ombord till:
- Alla sensorer (IMU, GPS, TOF) och flyglägen
- Videoström och metadata med alla kameror
- Kommunikationsgränssnitt Wi-Fi, 4G, USB
- Djupkartor och fyllningsgaller
- Skapande av hinder för undvikande av banor
Alla utvecklare kan:
- Ändra drönarens tillstånd genom att skapa flyguppdrag
- Ändra navigationsläget
- Lägg till inbäddade Linux -processer (för exempel, överför data över 4G -kanal eller använd datorsyn)
Air SDK stöder programmeringsspråket C eller Python. Air SDK levereras med detaljerad installationsguide och API -dokumentation. Många tillämpningsexempel illustrerar alla möjligheter som den unika arkitekturen erbjuder.
Ground SDK
Bygg en kraftfull mobilapp
Ground SDK är en Ground Control Station (GCS) mjukvaruplattform för mobila enheter (både iOS och Android stöds). Det tillåter alla utvecklare att skapa en mobilapplikation för ANAFI Ai för efterföljande kontroll av drönaren direkt från en mobil enhet. Alla BVS-funktioner (kontroll, video, inställningar) är tillgängliga via ett lättanvänt och fullständigt dokumenterat API.
OpenFlight
Markkontrollstation för öppen källkod
För första gången öppnar Parrot källkoden för sin markkontrollstationsapplikation. OpenFlight är kärnan i vår berömda open source FreeFlight 7 -app. Detta gör att utvecklaren kan fokusera på att lägga till sin egen funktionalitet och omedelbart ha en professionell app som är redo att publiceras i AppStore.

OpenFlight innehåller:
- All UX FreeFlight 7
- Alla gränssnittsinställningar
- Kod för 3D-visualisering i realtid av hinder
- Kod för hantering av 4G-kommunikation
- OpenFlight publiceras under en BSD-3-licens med en komplett installationsguide och omfattande dokumentation.
Sfinx
3D fotorealistisk simulering
Parrot Sphinx är ett avancerat dronsimuleringsverktyg. Papegojingenjörer använder den för att utveckla och testa alla ANAFI Ai -funktioner. Det allmänna konceptet är att simulera den verkliga firmware för drönaren med alla dess sensorer i en visuellt och fysiskt realistisk miljö.

Parrot Sphinx tillåter:
- Simulera alla kameror och sensorer
- Simulera djupkartor och segmentering bilder
- Navigera i många realistiska 3D -scener
- Anslut till olika typer av fjärrkontroller
- Använd skript för att styra simuleringen
- Lägg till fotgängare och fordon
- Visualisera och registrera flygdata
- Justera flygsensorer och omgivande fysiska element
- Kontrollera realtidsfaktor
Parrot Sphinx är byggd på grundval av avancerad standard komponenter:
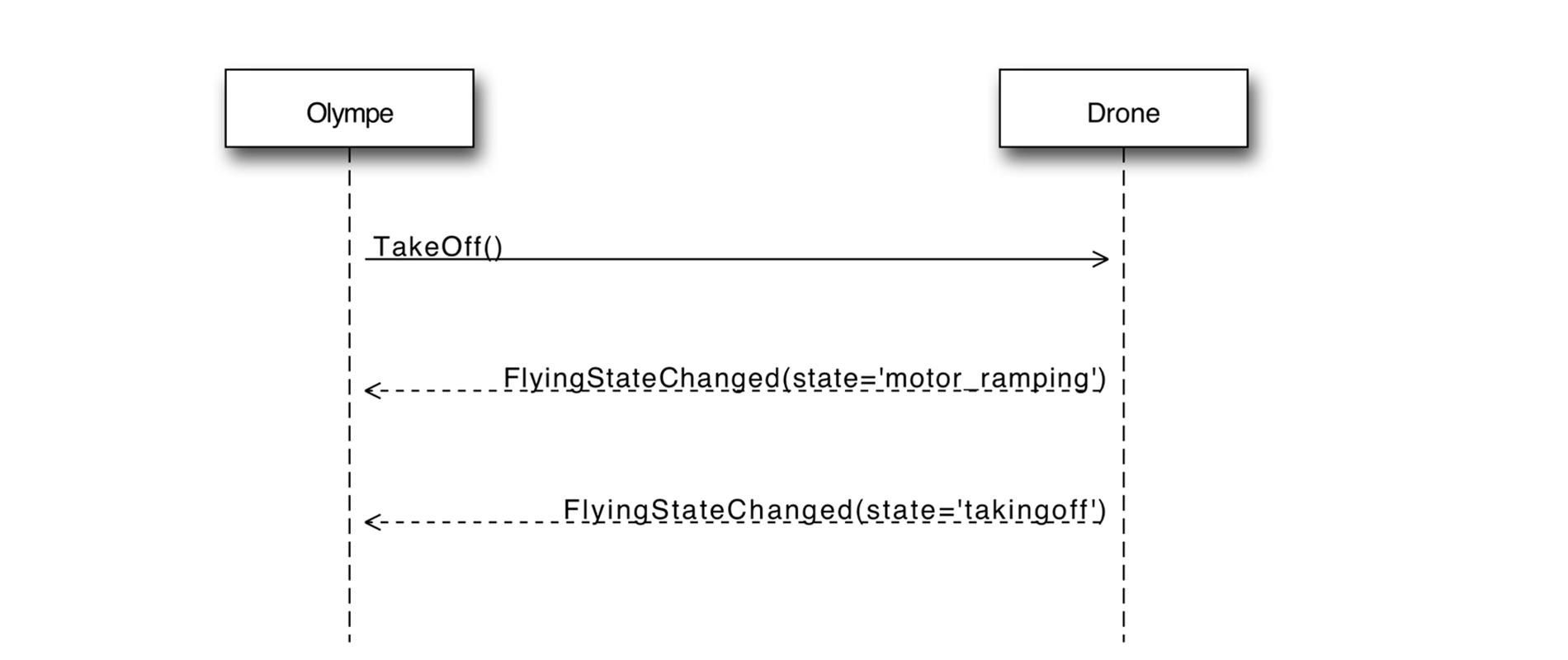
Olympe
Python för att styra ANAFI Ai
Olympe tillhandahåller ett programmeringsgränssnitt för Python -styrenhet för ANAFI Ai. Det ursprungliga syftet med Olympe var att interagera med Sphinx -modelleringsmiljön. Olympe kan också styra en fysisk ANAFI Ai från en fjärrdator.
Olympe -ramverk tillåter:
- Anslut till simulerad eller fysisk ANAFI Ai
- Skicka kommandomeddelanden (piloter, kamerorientering, Återvänd till hemmet, Flight Plan)
- Starta och sluta strömma video från alla kameror
- Spela in videoström och synkroniserade metadata
PdrAW
Advanced Media Player
PDrAW är en avancerad videovisare för ANAFI Ai -media. Betraktaren stöder både streaming (RTP / RTSP) och inspelad (MP4) video på Linux-, macOS-, Android- och iOS -plattformar. PDrAW kommer som ett bibliotek (libpdraw), ett wrapper-bibliotek (libpdraw-backend) och en fristående körbar (pdraw).
PDrAW hanterar också videometadata. På ANAFI Ai inkluderar både streaming och inspelad video metadata som är allmänt tillgängliga och dokumenterade, vilket möjliggör avancerad flygbearbetning från luften.
Modeller C. A. D.
Parrot tillhandahåller 3D -modeller av sina drönare för integration i din CAD -design för snabb prototypering och tillbehörsintegration.
MAVLink och GUTMA-kompatibilitet
ANAFI Ai är kompatibelt med det vanliga öppna källkod MAVLink v1-protokollet, vilket möjliggör realtidsutbyte av data mellan UAV och kontrollstationen. ANAFI Ai kan styras manuellt eller med automatisk flygplanering från en MAVLink -kompatibel basstation som QGroundControl.
* QGroundControl -gränssnitt
ANAFI Ai är kompatibelt med GUTMA standard flygdataprotokoll för öppen källkod. Global UTM Association är ett konsortium av stora aktörer inom flygkontrollområdet.

Största partnerekosystem för drönare Papegoja
Parrot fortsätter att expandera det globala ekosystemet av mjukvaruleverantörer för drönare genom sitt partner -SDK -program. erbjuder specialiserade och unika lösningar för de växande och utvecklande behoven hos professionella användare.] planera och importera flygloggar, innan du fotograferar, kartlägger, övervakar och analyserar mottagna data.
PIX4D × Parrot
2D / 3D -modelleringsprogram. En unik uppsättning mobil-, stationära och molnfotogrammetriapplikationer.
Verizon x Skyward x Parrot
4G LTE -drönarlösning i USA. Den första i sitt slag ANAFI Ai robotdrönare ansluten till Verizon 4G LTE-nätverket med förinstallerad Skyward-programvara. Öppnar dörren för dataöverföringar i närheten i realtid, fjärrdistributioner och flygresor som inte är synliga.

Skyward × Parrot
Integration och lärande inom ANAFI -kapacitet. Luftfartshanteringsplattform inklusive luftrum, LAANC -åtkomst och utbildning, utrustning och anslutning för distribution av drönare i företag.

DroneSense × Parrot
Bygg, hantera och skala dina drone -program. Obemannade proffs inom flygbilar inom den offentliga säkerhetssektorn kan använda hela DroneSense -funktionen, speciellt utformad för behoven hos första respondenter.

Parrot Ecosystem Partners

Parrot Affiliate Program
Utvecklaren erbjuder att utöka möjligheterna för hans program för drönare genom att integrera deras SDK.
Cybersecurity
Datakonfidentialitet
Utvecklaren noterar att han inte samlar in data utan användarnas medgivande. Beslutet om huruvida data ska överföras till Parrot -infrastrukturen eller inte vilar på användarna själva. Data som finns i Parrot tillåter användaren att synkronisera flygdata och flygplaner mellan olika enheter, samt underlätta support och göra det möjligt för Parrot att förbättra sina produkter.
ANAFI Ai följer Europeiska unionens allmänna dataskyddsförordning (GDPR) och går längre, till exempel kan du radera all data med ett klick och därigenom ge användarna den enklaste kontrollen. Problemet med ett klick löses i mobilappen FreeFlight7 eller i sekretessinställningarna för Parrot. Cloud-kontot. Således kan användare när som helst inte bara sluta utbyta data utan också enkelt begära att de ska raderas.
Om användaren samtycker till utbyte av data kommer behandlingen att utföras i ett helt transparent format, som beskrivs i detalj i Parrot Privacy Policy.
När ANAFI Ai är ansluten till Skycontroller 4 via 4G används Parrot -infrastruktur för att para ihop drönaren och fjärrkontrollen. Om användaren inte är inloggad på ett Parrot. Cloud -konto kan han fortfarande använda en 4G -anslutning med ett unikt tillfälligt konto. Vid användning av Parrots infrastruktur för 4G -parning krypteras videon med en nyckel som överenskommits mellan drönaren och fjärrkontrollen, Parrot har inte tillgång till okrypterad video.

FIPS140-2-kompatibel och CC EAL5 Secure Element
ANAFI Ai har ett inbyggt Wisekey-säkerhetselement som är NIST-kompatibelt FIPS140-2 Level 3 och Common Criteria EAL5-certifierad. Ett liknande säkerhetselement är också inbyggt i styrhårdvaran i Skycontroller 4.
Säkerhetselementets funktioner:
- Utför kryptografiska operationer
- Lagrar och skyddar konfidentiell information
Den använder en ECDSA privat nyckel med domänparametrar P521, unik för varje drönare. Det kan inte extraheras från säkerhetselementet. Och certifikatet som är associerat med denna nyckel är signerat av en certifieringsmyndighet.
Wisekey skyddar integriteten hos den fasta programvaran, ger unik drönareidentifiering för 4G -parning och stark autentisering och unik digital signatur av foton som tagits av drönaren.

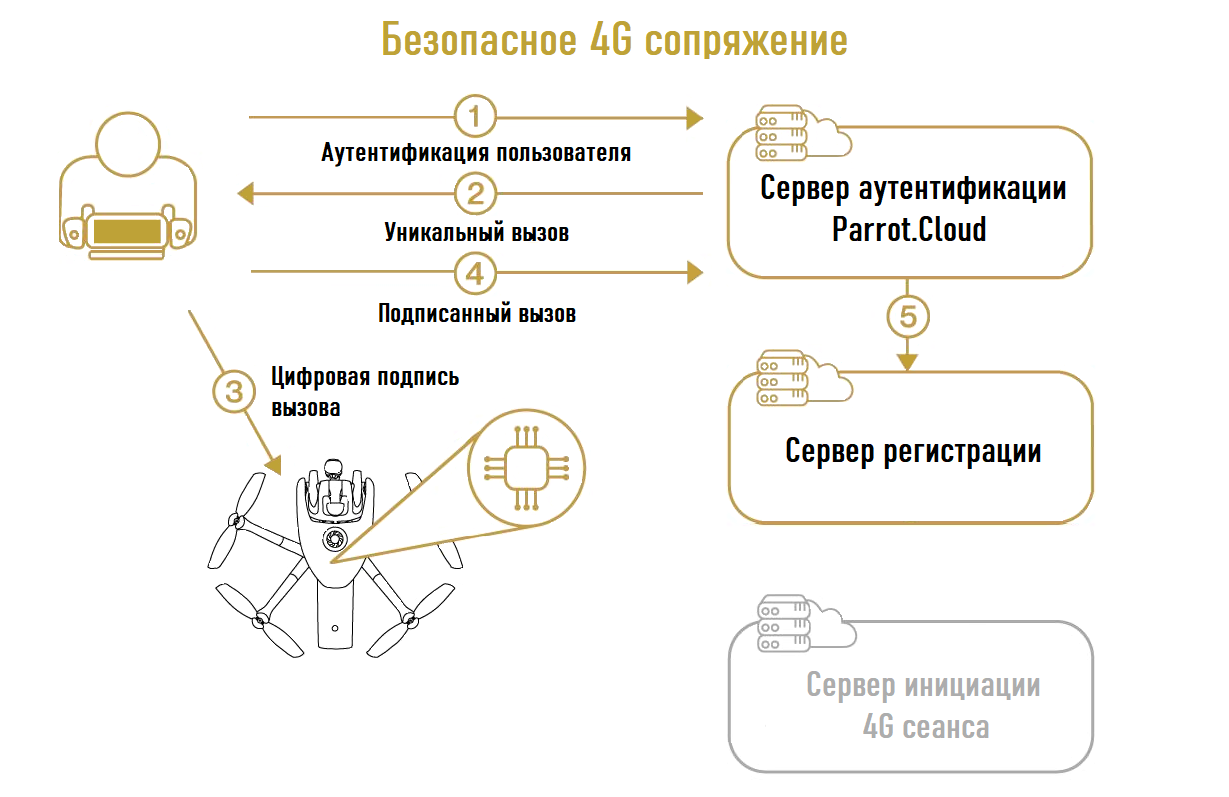
4G säker anslutning och stark autentisering
processen för säker parning av enheter. Under denna process bekräftar användaren pålitligt att han är ansluten till en specifik drönare. Tack vare ANAFI Ai Secure Element kan han göra detta utan att ange ett lösenord inuti drönaren.
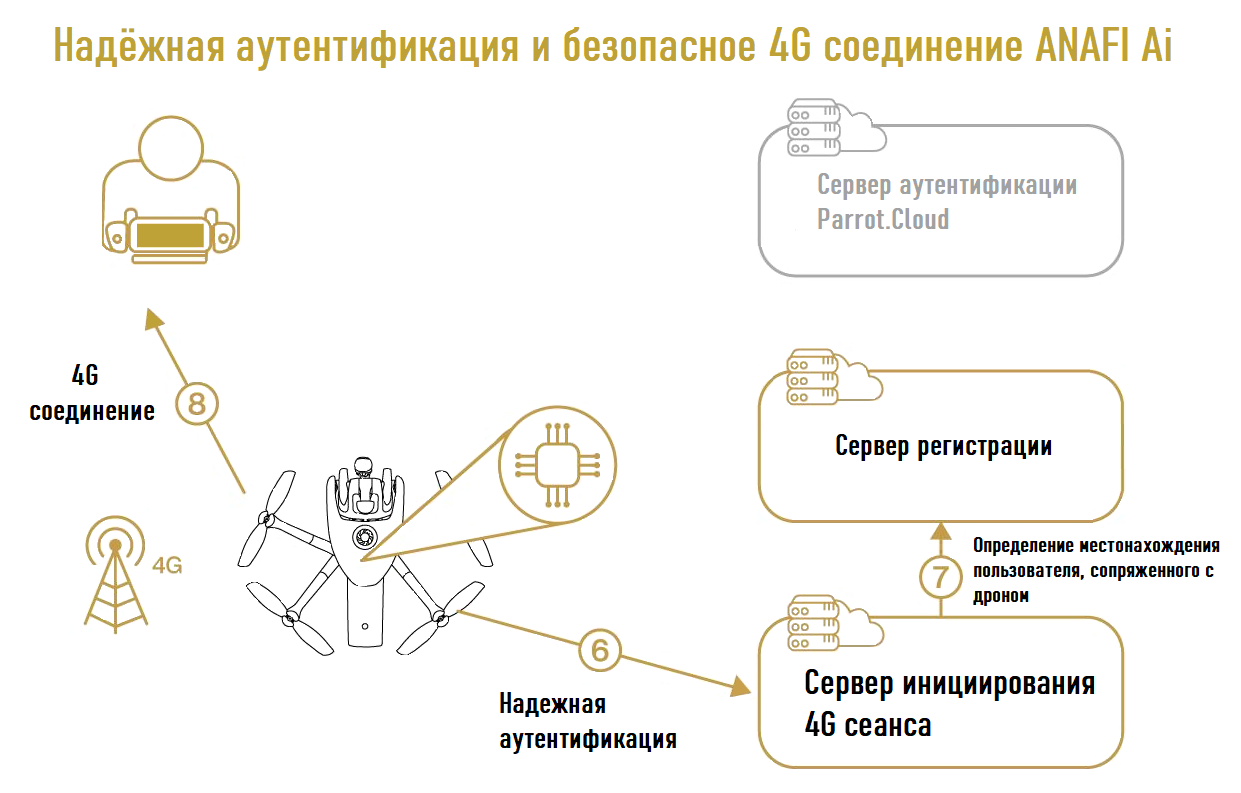
Parrot -servrarna registrerar sedan kommunikationen mellan användaren och drönaren. När Wi-Fi-anslutningen mellan användaren och drönaren tappas kommer ANAFI Ai automatiskt att växla till 4G-anslutning. ANAFI Ai utför stark autentisering på Parrot -servrar med sin privata nyckel lagrad på Secure Element. Parrot -servrar letar efter anslutna användare och tillhandahåller gränssnitt mellan ANAFI Ai och Skycontroller 4.
För att skydda drönarkontroll och videoströmmar som kommer till Skycontroller 4 stöder ANAFI Ai TLS-, DTLS- och SRTP -protokoll.
Säker initialisering och uppdatering
Flygplanets startsekvens är skyddad: systemet kontrollerar att den använder Parrot -programvara och att denna programvara inte har manipulerats. En säkerhetskontroll utförs vid varje initialisering. Uppdateringstjänsten styr också den digitala signaturen för programuppdateringar.
Konfigurera användarnycklar på Secure Element
ANAFI Ai -användare har tillgång till ett särskilt operatörskonto Secure Element. Detta konto används för att ställa in nycklar som är relevanta för den här användaren. Användare kan konfigurera Secure Element med de offentliga nycklarna till de uppdragsleverantörer de litar på. ANAFI Ai kommer endast att utföra uppdrag som är signerade med dessa nycklar. Denna process hindrar angripare från att utföra skadliga flyguppdrag på drönaren.
Digitalt signerade foton
Secure Element från ANAFI Ai kan digitalt signera drönarbilder. Denna signatur är ett bevis på att:
- Den signerade bilden togs av det angivna obemannade flygfordonet.
- Varken själva bilden eller dess metadata har bearbetats (frivilligt eller inte) - metadata, även känd som EXIF och XMP, innehåller information om bildens datum, tid och plats.

Med andra ord skyddar den digitala signaturen all data som är relaterad till bilden, inklusive plats och tid när den togs, och vilken ANAFI Ai -drönare.
Användare såväl som partners som erbjuder mjukvarulösningar med hjälp av drönarfotografering kan verifiera den digitala signaturen för ANAFI Ai -foton antingen med drone -certifikatet eller genom den offentliga nyckelkatalogen som tillhandahålls av Parrot.
Öppenhet och pågående säkerhetskontroller med Bug bounty
Parrot använder standardprotokoll och filformat när det är möjligt. Det finns ingen dold kod eller dolda funktioner. Detta gör att användaren kan förstå hur Parrot -produkter fungerar och testa deras säkerhet. Dessutom är OpenFlight, programvaran som används för att styra drönaren, öppen källkod, vilket ger användarna fullständig kontroll.
I april 2021 lanserade Parrot Bug Bounty -programmet med YesWeHack, Europas första crowdsourced -säkerhetsplattform. Genom detta partnerskap utnyttjar Parrot YesWeHacks stora forskarsamhälle för cybersäkerhet för att identifiera potentiella sårbarheter i sina drönare, mobilappar och webbtjänster.
Bug Bounty -programmet består av två faser:
Privata program ger initialt exklusiv tillgång till utvalda säkerhetsforskare och inkluderar framtida Parrot drone -modeller. Forskarnas erfarenhet och mångsidiga kompetens kommer att bekräfta produkternas höga säkerhetsnivå innan de går ut på marknaden, vilket kommer att bidra till att förbättra säkerheten för Parrot -användare och skyddet av deras data.
Efter denna första omgång av det privata Bug Bounty -programmet och efter kommersialisering går produkterna in i det offentliga programmet. Deras säkerhet granskas sedan noggrant av hela YesWeHack -gemenskapen med över 22 000 cybersäkerhetsforskare.

Datahantering
Parrot Cloud tillåter användare som väljer att dela sina data för att hantera flyg- och flottdata samt multimedia data som mottagits av deras drönare.
Insamlade data
Parrot Cloud samlar in 4 typer av data:
Statisk (produktdata):
- Flygplan serienummer
- Batteriets serienummer
- Version av flygplan och batterier Version
Händelser
- Varningar: Batteri, autopilot, sensorer
- Kommunikation: ansluta / koppla från, starta streaming, störningsvarning, svag signal
- Kamera: strömningsstatistik, inställningsändringar
- Flyg: tillståndsförändring (start, landning, svävar etc.), aktivering av en flyguppgift (flygplan, fotogrammetri)
"Kontextuella bilder"
- Timelapse- ögonblicksbild och (en gång varannan minut)
- Deep Learning (kartläggning av fler objekt, landskap för att förbättra flygens autonomi, spårning, förhindrande av hinder)
- Stereovision (djupkarta)
- Bilder utlöses efter händelse
- Start och slut på exakta svävande uttalanden, exakt landning
- Drone -krasch
- Ansikten suddas automatiskt under överföring
Telemetri
Slutlig användning av insamlad data
Papegoja samlar bara in och använder data från kunder som har kommit överens om att dela den för att förbättra kvaliteten av sina produkter...
Underhållshantering
Förebyggande underhåll: Våra verktyg samlar all information relaterad till uppdrag (uppdragstyp, start och landningstider, antal uppdrag, plats för drönare, flyghastighet, flygplan och AirSDK -inställningar). Detta gör att du kan få korrekt information om statusen för ANAFI Ai drönare flotta (liksom deras kontroller och batterier) i realtid.
Korrigerande underhåll: Den insamlade informationen är användbar för att snabbt bestämma status för en viss drönare eller ett batteri.
Förbättrad artificiell intelligens (AI)
AI -elementen i ANAFI Ai (PeleeNet, konvolutionella nätverk etc.) erbjuder användare oöverträffade tjänster och funktioner: hinderundvikande, målspårning, flera flyglägen. Kvaliteten på AI beror på mängden och kvaliteten på den insamlade data (bilder och videor): denna data matar maskininlärning. I detta avseende är datakvalitet inte det enda avgörande elementet: metadata som är associerade med dessa data är också grundläggande. Av detta skäl samlar vårt verktyg in bilder och metadata regelbundet och beroende på händelser, totalt 30 till 50 MB per minut.
Flygegenskaper
Aerodynamiska egenskaper
Drivningar och aerodynamik
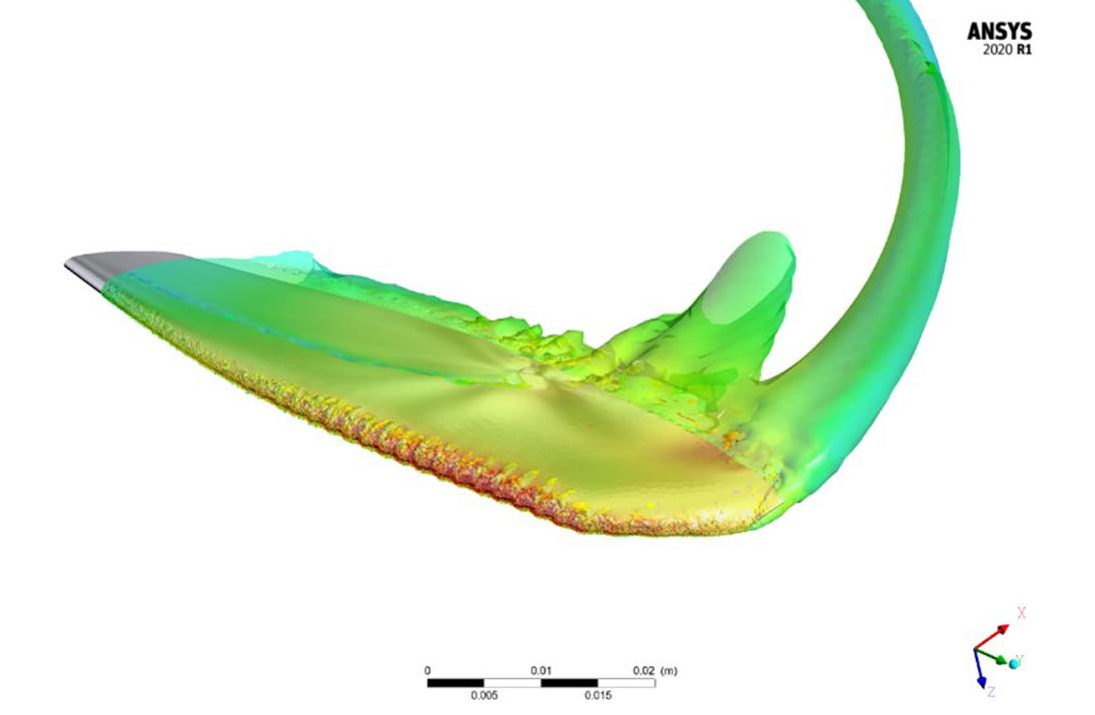 CFD-bild av ANAFI Ai-propellerblad
CFD-bild av ANAFI Ai-propellerblad Nya biomimikpropellerblad med en knölryggsliknande framval. Detta tillvägagångssätt gjorde det möjligt att öka kraftverkets framdrivningseffektivitet, vilket vid utgången gav ökad dragkraft vid samma rotationshastighet. Denna effekt är jämförbar med en ökning av rotordiametern.
Akustiskt brus, särskilt tonljud, som kommer från framkanten, reduceras också. Därför är ANAFI Ai tystare [71,5 dB SPL (A) vid 1 m] än Skydio 2 [76,4 dB SPL (A) vid 1 m].
- Flygtid mer än 32 minuter
- Tack vare de optimerade aerodynamiska egenskaperna hos flygkroppen och ANAFI Ai -framdrivningssystemet är den maximala hastigheten för flygning framåt 61 km / h, med sidoflyg och flygning bakåt 58 km / h
- Max. vindmotstånd 12,7 m / s.
- Tack vare motorns / propellerns höga vridmomenteffektivitet och höga batteriets autonomi är räckvidden 22,5 km (med en konstant hastighet på 50 km / h vid lugnt väder).
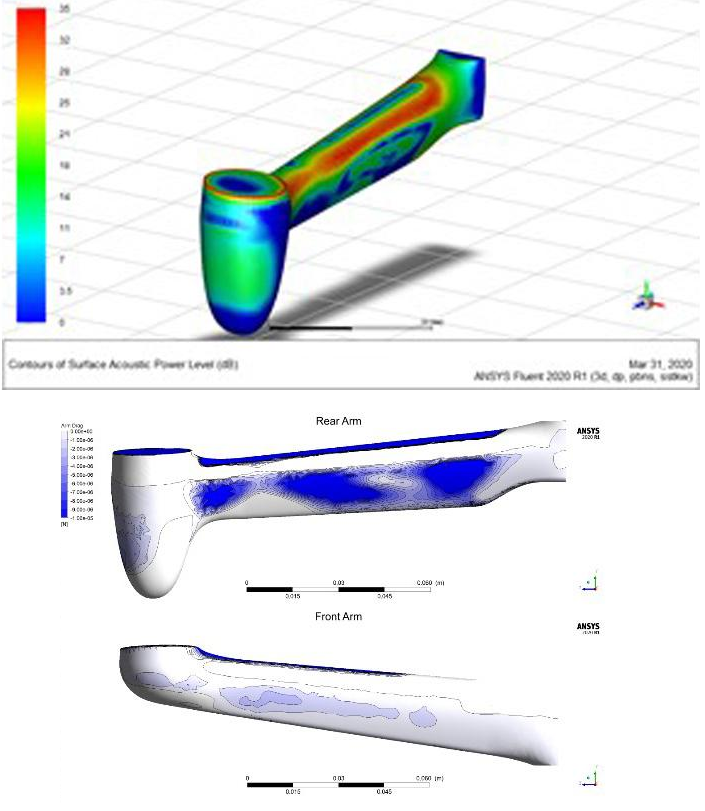 CFD -bilder av ANAFI Ai -strålar
CFD -bilder av ANAFI Ai -strålar Sensorer
För att säkerställa säker flygning ANAFI Ai är utrustad med:
- 2 × IMU (ICM-40609-D och ICM42605)
- Magnetometer LIS2MDL
- GPS-modul UBX-M8030
- TI OPT3101 flygtid (ToF)
- Barometer LPS22HB
- Vertikal kamera
Sensorkarakteristik
)
Flight IMU: ICM-40609-D
- 3-axlig gyroskop
- Område: ± 2000 ° / s
- Upplösning: 16,4 LSB / ° / s
- Offset / Noggrannhet: ± 0,05 ° / s (efter termisk och dynamisk kalibrering)
- 3-axlig accelerometer
- Område: ± 16g
- Upplösning: 2,048 LSB / mg
- Förskjutning / noggrannhet: ± 0,5 mg (XY) ± 1 mg (Z) (efter termisk och dynamisk kalibrering)
- Temperaturkontroll s: styrt värmesystem i förhållande till omgivningstemperaturen, stabiliserat inom: ± 0,15 ° C
- Mätfrekvens: 2 kHz
Magnetometer: LIS2MDL
- Område: ± 49,152G
- Upplösning: 1,5 mG
- Förskjutning / noggrannhet: ± 15 mG (efter kompensation, vid maximalt motorvarvtal)
- Mätfrekvens: 100 Hz
Barometer: LPS22HB 1
- Område: 260 till 1260 hPa
- Upplösning: 0,0002 hPa
- Förskjutning / noggrannhet: ± 0,1 hPa
- Temperaturreglering: styrt värmesystem i förhållande till omgivningstemperaturen, stabiliserat inom: ± 0,2 ° C
- Mätfrekvens: 75 Hz
- Mätbrus: 20 cm RMS
GNSS: UBX-M8030 1
- Keramisk patchantenn 25 × 25 × 4 mm, möjliggör förbättring av 2 dB förstärkning jämfört med ANAFI 1
- Känslighet: kallstart -148 dBm / spårning och navigering: -167 dBm
- Time-To-First-Fix: 40 sekunder
- Noggrannhet / noggrannhet: Position (standardavvikelse 1,4 m), hastighet (standardavvikelse 0,5 m / s)
Vertikal kamera
- Bildsensor format: 1/6 tum
- Upplösning: 640 × 480 pixlar
- Bildsensor med global slutare
- Svartvitt
- FOV: Horisontell synvinkel: 53,7 ° / vertikal bildvinkel: 41,5 °
- Brännvidd: 2,8 mm
- Mätning av det optiska flödets hastighet på marken vid 60 Hz
- 15Hz & precisionpassning @ 5Hz
ToF: TI OPT3101
- Område: 0-15m
- Upplösning: 0,3 mm
- ) Noggrannhet b: ± 2 cm (efter kalibrering)
- Mätfrekvens: 64 Hz
Vertikal kamera IMU: ICM-42605
- 3-axlig gyroskop
- Område: ± 2000 ° / s
- Upplösning: 16,4 LSB / ° / s
- Förskjutning / noggrannhet: ± 0,1 ° / s (efter dynamik Kalibrering)
- 3-axlig accelerometer
- Område: ± 16g
- Upplösning: 2,048 LSB / mg
- Förskjutning / noggrannhet: ± 2,0 mg (XY) ± 5,0 mg (Z) - efter dynamisk kalibrering
- Mätfrekvens: 1 kHz
- Hårdvarusynkronisering med vertikal kamera, noggrannhet: 1 μs
Autopilot
ANAFI Ai Flight Controller ger enkel och intuitiv styrning: ingen utbildning krävs för att styra den. Det låter dig automatisera många flyglägen (Flight Plan, Cameraman, Hand take-off, Smart RTH). Sensorfusionsalgoritmer kombinerar data från alla sensorer för att uppskatta ANAFI Ai -förhållandet, höjd, position och hastighet.
Tillståndsbedömning är avgörande för att drönare ska fungera korrekt. Quadcopters är i sig instabila när flygkontrollen används med en öppen slinga; för att enkelt styra dem, för att inte tala om autonom kontroll, är det nödvändigt att stabilisera dem med hjälp av slutna loop-algoritmer. Dessa algoritmer beräknar och skickar kommandona till motorerna som krävs av ANAFI Ai för att uppnå önskade banor.

Inomhusflygning
I avsaknad av en GPS -signal förlitar ANAFI Ai sig främst på vertikala kameramätningar för att uppskatta hastighet och position. Den vertikala kamerans prestanda bestäms av två huvudalgoritmer:
- Optiskt flöde för hastighetsuppskattning
- Nyckelpunktdetektering och matchning för positionsuppskattning
Vertikal kamera algoritmer kan fungera i svagt ljus tack vare ANAFI Ai som är utrustad med ett par LED -lampor bredvid den vertikala kameran. De tillåter drönaren att förbli stabil, särskilt när man flyger inomhus eller i avsaknad av GPS, på en höjd av mindre än 5 m över marken. LED -lampornas effekt anpassas automatiskt, beroende på algoritmens behov.
Autonomt flyg
Viktiga funktioner
- Roterande avkänningssystem med stort synfält
- Extraktion av det omgivande rymdets djup baserat på stereoanpassningen och djupet genom rörelse
- Miljörepresentation i form av ett fyllningsgaller
- Autonom upptäckt och undvikande av hinder vid hastigheter upp till 29 km / h
Detta kapitel beskriver sensorer, hårdvara och algoritmer som används av ANAFI Ai för att möjliggöra autonom flygning. Det är organiserat enligt följande:
- En detaljerad beskrivning av ANAFI Ai -uppfattningssystemet
- Perceptuella algoritmer som används för att rekonstruera 3D -miljön som omger drönarna
- Omplanering och hinder undvikande

Uppfattningssystemstrategi
Uppfattningen av den tredimensionella miljön är en viktig förmåga att uppnå autonom flygresa, särskilt i trånga utrymmen. Det är en förutsättning för garanterad upptäckt och undvikande av hinder, vilket minskar bördan för droneoperatören, ökar uppdragets framgång och garanterar flygplanets säkerhet.
Att frigöra den fulla potentialen hos en flygande kamera, som fritt kan röra sig och rotera i alla riktningar utan begränsningar, kräver en effektiv avkänningslösning. I synnerhet bör avkänningssystemet kunna ta emot information om miljön i riktningar som motsvarar rörelsen framåt under flygning - oavsett kamerans orientering.
ANAFI Ai förlitar sig på en unik teknisk lösning baserad på två mekaniska gimbal för att separera orienteringen av huvudkameran och avkänningssystemet:
- Huvudkameran är monterad på en 3- axel gimbal, vilket gör den 3D -orientering oberoende av drönarens orientering.
- Avkänningssystemet är monterat på en enaxlig gimbal - ansluten till drönarens gungrörelse, det kan orienteras i valfri riktning.
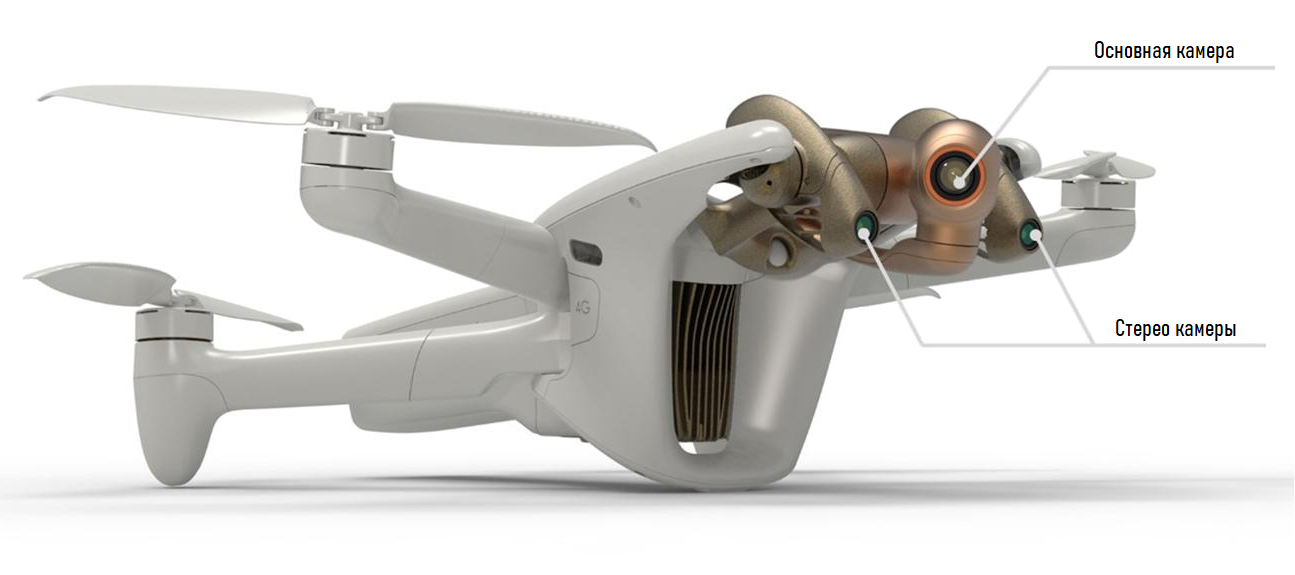 ANAFI Ai dubbelstabilisator för uppfattning och visualisering.
ANAFI Ai dubbelstabilisator för uppfattning och visualisering. Lutningsaxlarna för de två hängarna är kollinära och kombinerade för att uppnå en ultrakompakt design.
Tack vare denna lösning är det möjligt att rikta huvudkameran och avkänningssystemet i två olika riktningar. Denna design undviker användning av dyra kameror på sidorna, toppen, botten och baksidan av drönaren samtidigt som det ger ett stort tillgängligt synfält för avkänningssystemet.
Detta avsnitt är organiserat enligt följande:
- Detaljer om sensorerna som används för avkänningssystemet
- Specifikationer för både huvudkamerans gimbal och avkänningssystemet gimbal
- Strategier för att rikta in avkänningssystemet för att utnyttja potentialen i den dubbla upphängningsstrukturen
Sensorer
Avkänningssystemet är baserat på ett par av identiska kameror med en tonhöjd...
 1-axlig mekanisk gångjärn för ANAFI Ai-avkänningssystem.
1-axlig mekanisk gångjärn för ANAFI Ai-avkänningssystem. Sensorspecifikationer är följande:
- Modell: Onsemi AR0144CSSM28SUD20
- Färg: Monokrom
- Upplösning: 1280 × 800 pixlar
- Bildhastighet: 30 fps
- Global slutare
- Fullt horisontellt synfält: 118 ° (110 ° användbart för avkänning)
- Fullt vertikalt synfält: 72 ° (62 ° användbar för avkänning)
- Brännvidd: 1,47 mm (0,039 tum - 492,94610 pixlar)
- Bländare: f / 2,7
Specifikationer stereopar är följande:
- Common Pitch Axis
- Baslinje / avstånd: 62 mm (2,44 tum)
- Synkron fångst vid 30 fps

Dual Gimbal
Huvudkamerans mekaniska gimbal är en 3-axlig mekanisk tonhöjd l -yaw "med följande egenskaper:
- Pitch Limiters: -116 ° / 176 °
- Roll Limiters: / -36 °
- Yaw Limiters: / - 48 °
Avkänningssystemets mekaniska upphängning är en enda axelupphängning med följande egenskaper:
- Slutstopp i stigning: -107 ° / 204 °
- Restid från ett ändstopp till ett annat: 300 ms
Avkänningssystemet har 311 ° rörelse (varav 296 ° inte maskeras av drönarens kropp), vilket möjliggör bakåt uppfattning.
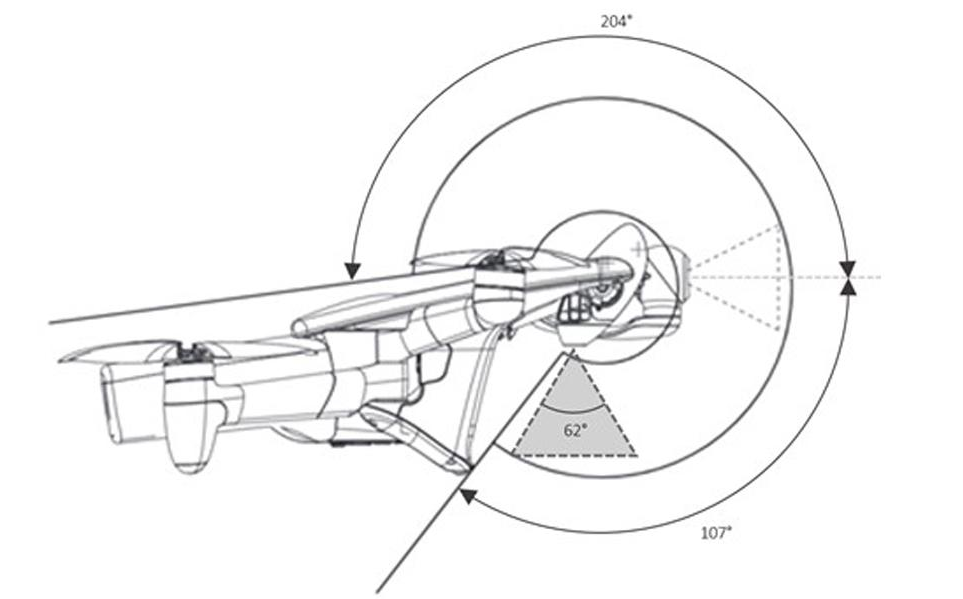
Omedelbart vertikalt synfält och begränsande uppfattningssystem ANAFI Ai.
Systemet var konstruerat på ett sådant sätt att:
- Propellerbladen inte kommer in i huvudkamerans synfält
- kameran täcker inte synfältet för uppfattningssystemet
- Huvudkameran och avkänningssystemet kan fällas tillbaka helt för att skydda linserna
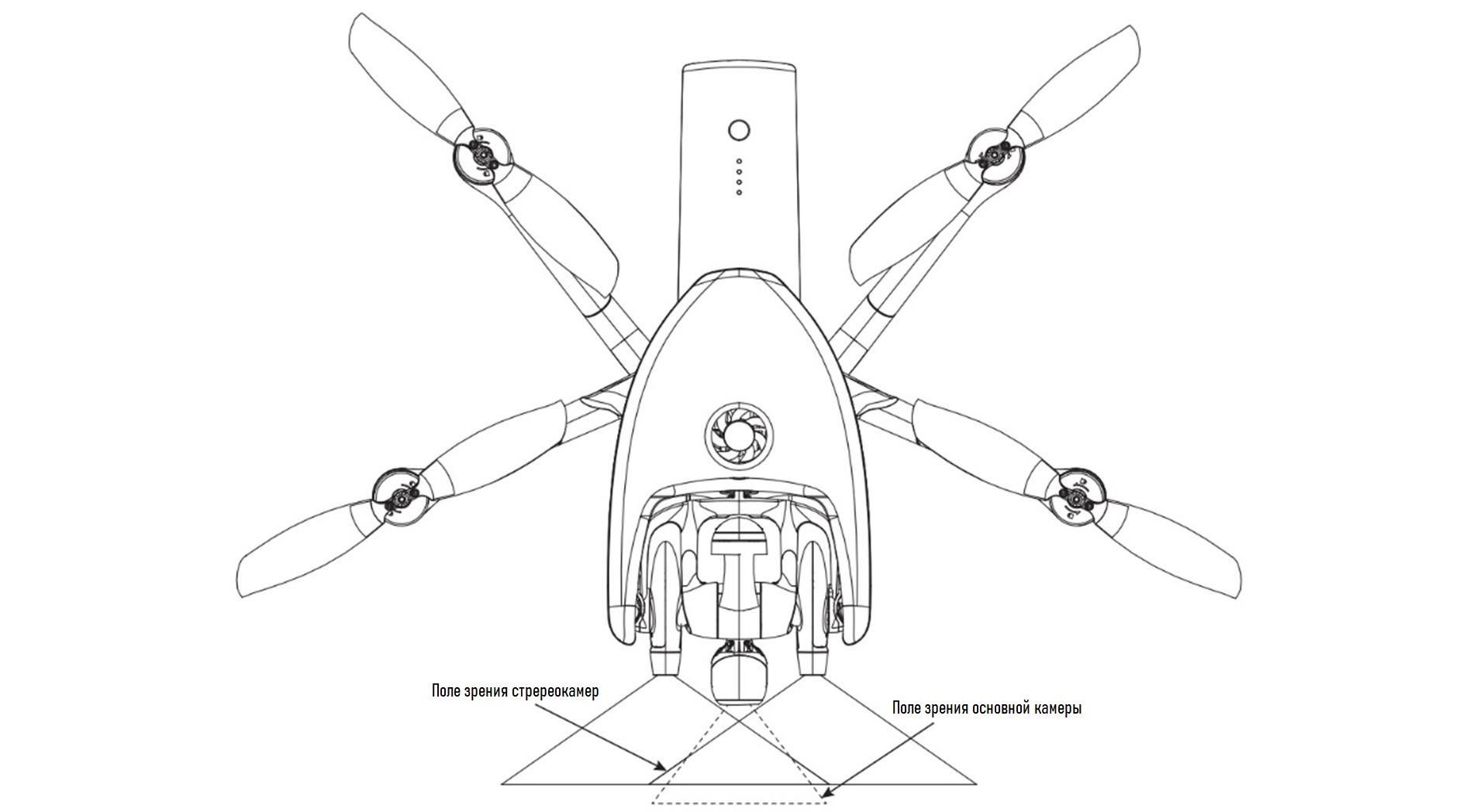 Det horisontella synfältet för ANAFI Ai -uppfattningssystemet.
Det horisontella synfältet för ANAFI Ai -uppfattningssystemet. När man lutar sig bakåt rör sig uppfattningssystemet till det översta läget och ger därmed en klar bild.
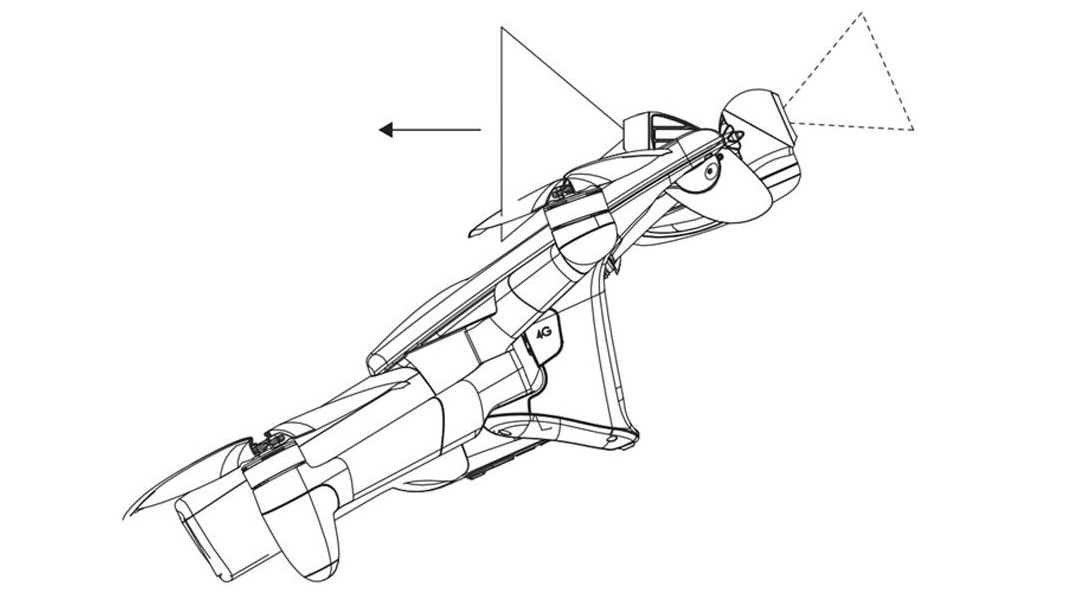
Uppfattning av ANAFI Ai i helt tillbakalutat läge för flygning bakåt.
Rekonstruktion av miljön
Rekonstruktion av den omgivande tredimensionella miljön för autonom flygning utförs i två steg:
- Extrahera djupinformation från perception i form av djupkartor
- Kombinera djupkartdata till ett tredimensionellt fyllningsnät
Två metoder används för att få djupkartor från uppfattningssensorer:
- Djup baserat på stereojustering
- Djup från rörelse
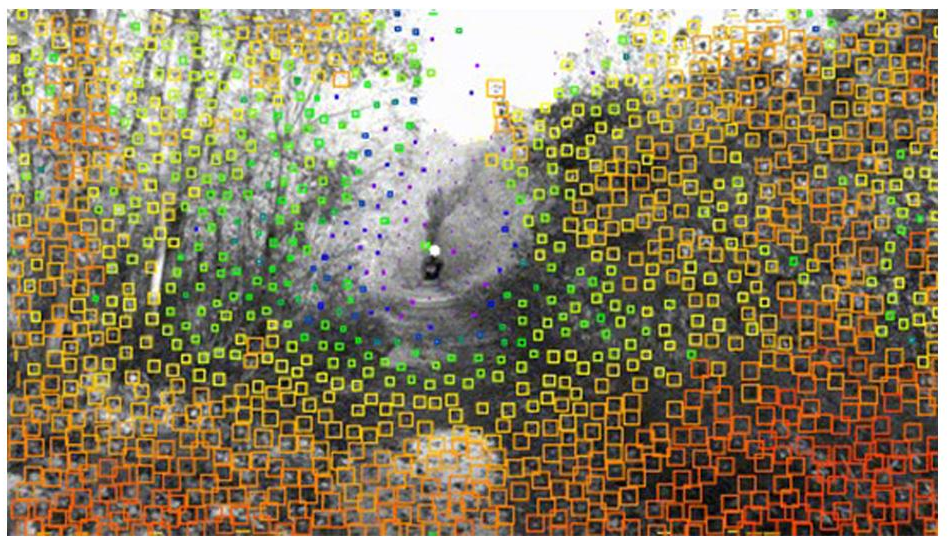
Djup från stereokorrespondens
Huvudmetoden för att extrahera djup information baseras på parallax mellan två stereokameror i uppfattningssystemet. Genom att fotografera miljön i en riktning, men från två olika positioner, visas objekt i synfältet för uppfattningssystemet i olika positioner i bilderna som erhålls med två kameror. Ju närmare motivet, desto större skillnad i position.
Strategin är således att bestämma punkterna i bilderna som erhålls av vänster och höger stereokameror som motsvarar samma objekt i avkänningssystemets synfält och mäta skillnaden i positionen för dessa punkter i de två bilderna. Denna skillnad kallas skillnad och mäts i antalet pixlar.
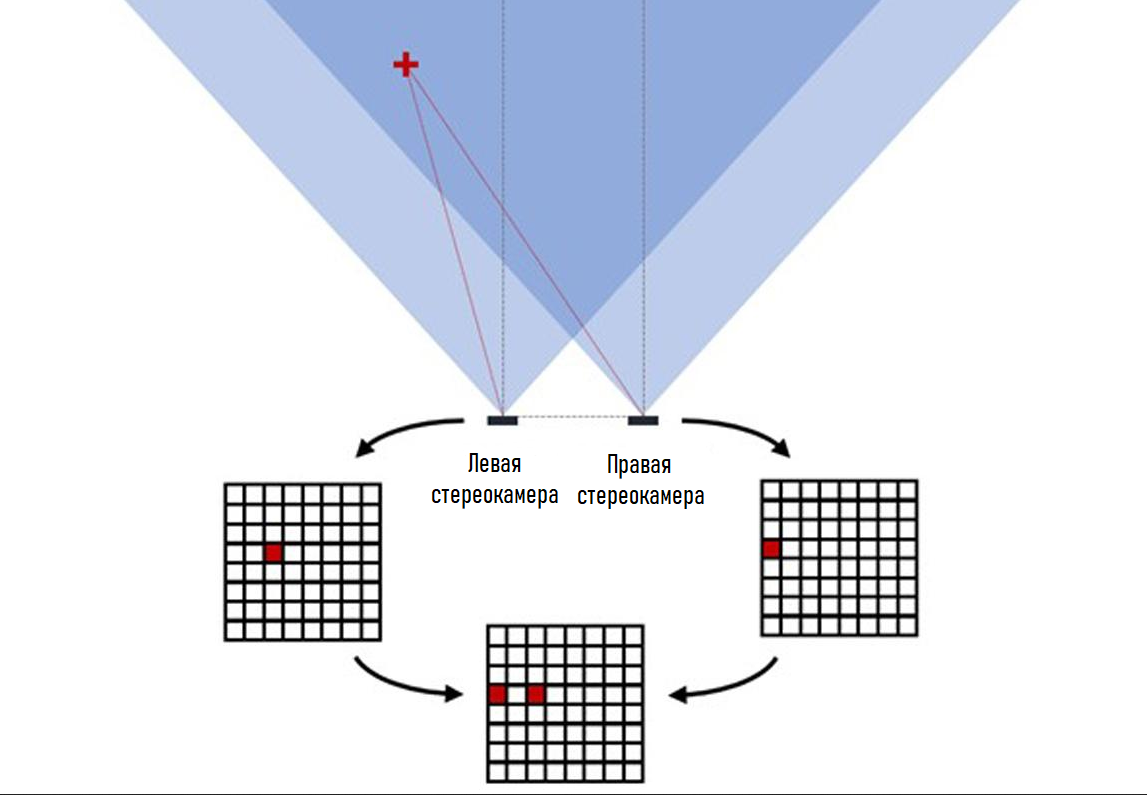 Illustration av principen om stereosyn - den röda 3D -punkten finns i olika positioner på vänster och höger bild.
Illustration av principen om stereosyn - den röda 3D -punkten finns i olika positioner på vänster och höger bild. Skillnaden kan sedan relateras till djupet för var och en av dessa punkter med hjälp av följande förhållandedjup = fokal * baslinje / olikhet, där djupet och baslinjen uttrycks i samma enheter, och fokalen längd och skillnad uttrycks i antalet pixlar.
Resultatet av beräkningen har formen av en djupkarta på 176 × 90 pixlar, för vilket värdet för varje pixel motsvarar djupet i meter. Djupkartan uppdateras vid 30 Hz.
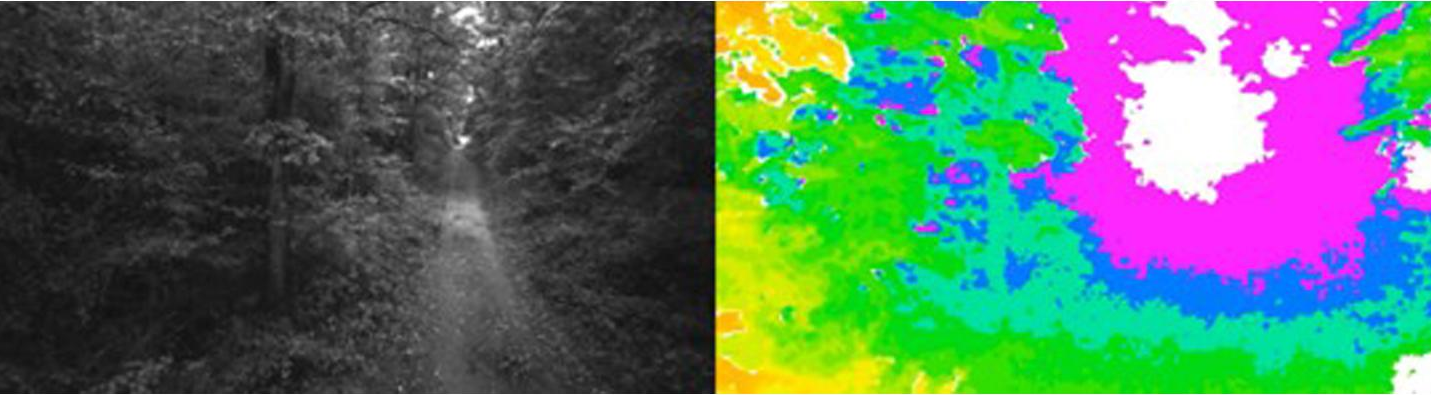
Ett exempel på en bild som tagits av den högra kameran på ANAFI Ai -avkänningssystemet (vänster) och motsvarande djup som erhållits med stereobilder (höger). Färgkartan går från rött (närmare) till lila (längre) - vitt betyder Out of Reach.
Det omedelbara resultatet av detta är att djupet som mäts med denna metod diskretiseras, eftersom skillnaden bara kan ta diskreta värden (antal pixlar). En 3D -punkt som ligger tillräckligt långt från uppfattningssystemet och skapar en teoretisk skillnad som är mindre än en pixel kommer att betraktas som oändlig, eftersom motsvarande faktiska diskreta skillnad kommer att vara lika med 0. Noggrannheten i stereojämförelsesmetoden minskar med ökande avstånd, även om det finns är metoder som kan minska detta fenomen genom att uppnå subpixelprovtagning.
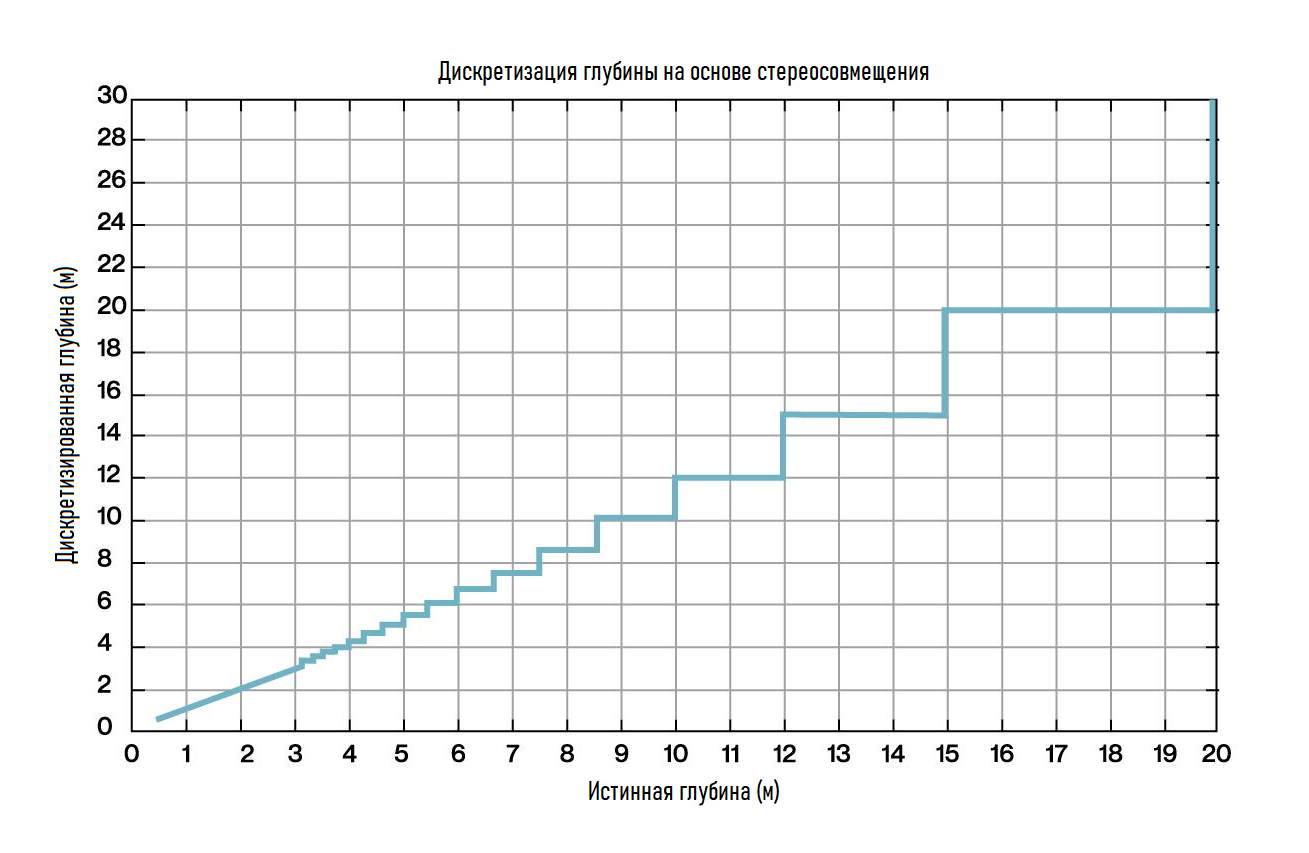 Diskretiserat djup mätt med "stereojustering" kontra "sant djup".
Diskretiserat djup mätt med "stereojustering" kontra "sant djup". Dessutom skiljer sig skillnaden åt när djupet närmar sig noll. Eftersom antalet pixlar i bilder är begränsat är skillnaden också begränsad. Som en konsekvens finns det ett minimidjup på vilket det perceptuella systemet är blind. Detta minsta djup är 36 cm för ANAFI Ai.
Om kalibrering: Varje par stereokameror är fabrikskalibrerade för att noggrant mäta små avvikelser som kan finnas mellan de två kamerorna och kompensera för dem i inbyggda djupberäkningar.
Användaren kan också kalibrera ett par stereokameror med hjälp av testmönstret som medföljde drönaren. I synnerhet kan drönaren i viss utsträckning upptäcka potentiella kalibreringsfel som kan uppstå under dess livstid. I det här fallet kommer flygplanets programvara att försöka justera och kompensera för dem, och om detta misslyckas visas ett meddelande som ber dig att kalibrera om.
Djup från rörelse
Drönarens rörelse kan också användas för att samla in bilder av miljön från olika vinklar och på så sätt rekonstruera djupinformation. Denna teknik kallas djup från rörelse eller monokulär avkänning, eftersom en enda rörlig kamera är tillräcklig för att samla in djupinformation.
Funktionsprincipen liknar stereosyn, men istället för att jämföra bilder av miljön som erhållits av olika observatörer samtidigt, jämför perception bilder av miljön som erhållits av samma observatör vid olika tidpunkter. Om drönaren rör sig, kommer bilderna från denna unika observatör att fångas från olika vinklar. Genom att veta positionen där varje ram togs, är det möjligt att triangulera punkter som motsvarar samma funktion i olika bilder och återföra dem till 3D.
Utmatningen är ett tredimensionellt punktmoln som innehåller upp till 500 punkter för ANAFI Ai, genererat med en frekvens av 10 Hz.
 Ett exempel på ett punktmoln skapat baserat på djup från rörelse - färgkartan går från rött (närmare) till lila (längre).
Ett exempel på ett punktmoln skapat baserat på djup från rörelse - färgkartan går från rött (närmare) till lila (längre). ANAFI Ai Motion Depth -algoritmen genererar vanligtvis mindre information (gles punktmoln) än stereomatchningsalgoritmen och kräver att drönaren flyttar sig för att samla in information. Dessutom kan denna algoritm inte extrahera information i den exakta rörelseriktningen (åtminstone för direktsändningar), eftersom objekt i bilderna verkar nästan stationära i denna riktning (expansionsfokus).
Den har dock ett bättre detektionsområde (teoretiskt oändligt område) än stereomatchning.
Fill Grid
Djupinformation från stereo- och monokulära avkänningsalgoritmer är integrerad i Fill Grid. Detta nät provar 3D -miljön i 3D -kuber som kallas voxlar. Varje voxel tilldelas sannolikheten för att bli upptagen av ett hinder eller omvänt att vara fri från ett hinder.
En strålöverföringsalgoritm används för att integrera djupinformation i ett fyllningsnät. För varje pixel av djupkartan som erhålls som en följd av stereojämförelse omvandlas den till en tredimensionell punkt och för varje punkt i punktmolnet - till djupet som erhålls som ett resultat av rörelse:
- En stråle dras i fyllningsgallret från positionen för uppfattningssystemet till positionen för 3D -punkten.
- Sannolikheten för att en voxel som innehåller en 3D -punkt upptas ökar.
- Sannolikheten att alla voxlar som korsas av en annan stråle än den som innehåller 3D -punkten är upptagna minskar.
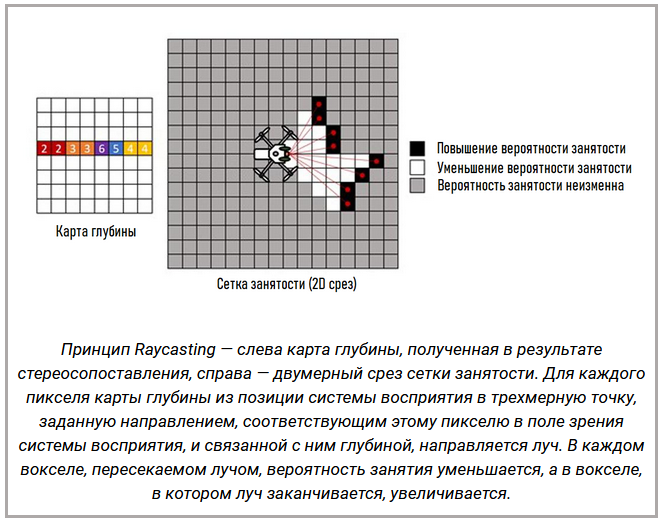
Således fungerar nätet som ett tidsfilter för djupinformation, absorberar eventuellt brus i djupmätningen och som ett minne från tidigare mätningar, vilket gör det möjligt att du kan navigera i svåra miljöer även i avsaknad av ett kontinuerligt 360 ° synfält för uppfattningssystemet.
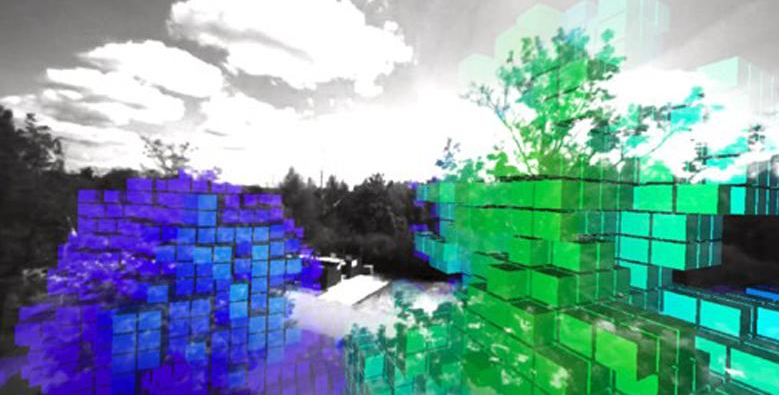 Ett exempel på ett fyllningsnät. Voxels ligger ovanpå den högra stereokameravyn med en hög grad av säkerhet att de är upptagna, allt från rött (nära) till lila (långt).
Ett exempel på ett fyllningsnät. Voxels ligger ovanpå den högra stereokameravyn med en hög grad av säkerhet att de är upptagna, allt från rött (nära) till lila (långt). Infill -rutnätet är grunden för de algoritmer för rörelseplanering som ANAFI Ai använder för autonom flygning och hinderundvikande.
Undvikande av hinder
Tack vare kunskapen om 3D -miljön för drönaren som lagras i infillnätet kan ANAFI Ai undvika hinder. Detta ger betydande ytterligare säkerhet för autonoma uppdrag, men är också användbart för manuell flygning, särskilt om siktlinjen mellan piloten och drönaren är nedsatt.
Var 30: e ms förutsäger ANAFI Ai vad den nominella korta tidshorisonten kommer att vara i framtiden. Denna förutsägelse härleds från länkarna som skickas av användaren, oavsett om det är flygkommandon från fjärrkontrollen, vägpunkter att koppla till en flygplan eller en inmatningsbana. Därefter, med hjälp av den simulerade interna drönarmodellen, beräknar omplaneringsalgoritmen de minsta möjliga korrigeringarna av denna förutsagda nominella bana som gör den kollisionsfri och genomförbar för drönaren.
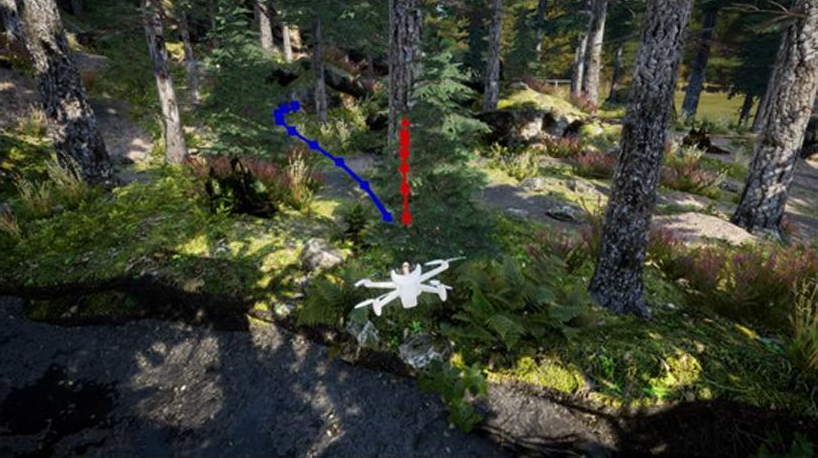 Ett exempel på den korrigerade banan som beräknats av hinderundvikelsesalgoritmen som svar på kollisionen mellan referensbanan och ett träd.
Ett exempel på den korrigerade banan som beräknats av hinderundvikelsesalgoritmen som svar på kollisionen mellan referensbanan och ett träd. ANAFI Ai hinderundvikande system har utformats för att fungera med hastigheter upp till:
- Nivåflygning: 29 km / h
- Klättring: 14 km / h
- Nedstigning: 11 km / h
Undvikandeprestanda är begränsad i regn eller stark vind, svagt ljus eller störd satellitnavigering. Dessutom måste du se till att avkänningssystemets linser är rena innan du flyger.
Flyguppdrag

Viktiga funktioner
Air SDK (se. SDK -sektion) gör det möjligt för utvecklare att få tillgång till alla dronesensorer, kameror, anslutningsmöjligheter och fristående funktion. Därför kan de anpassa drönarens beteende för att skapa flyguppdrag. Varje flyguppdrag innehåller en uppsättning grundläggande beteenden eller lägen:
- På marken: Beteende när motorerna stoppas, t.ex. sensorkalibrering.
- Start: olika startstrategier
- Hover: håll en fast punkt
- Flight: manual funktioner och autonom flykt
- Landning: olika landningsstrategier
- Kritisk: vid upptäckt av ett kritiskt tillstånd
Anpassade flyguppdrag kan skapa nya beteenden eller återanvända dem från standarduppdraget.
Pris och tillgänglighet
Starten av försäljningen av ANAFI Ai -drönaren är planerad till september 2021. Prisinformation har inte avslöjats för tillfället. Vi fortsätter att övervaka inkommande information och kommer definitivt att uppdatera detta avsnitt vid ett senare tillfälle.

Dokument för nedladdning
Dokumentation för att bekanta dig med produkten från utvecklaren:
- Ladda ner fullständig teknisk dokumentation från utvecklaren
- Ladda ner produktspecifikationen från utvecklaren
Videor
Topprecensioner ANAFI Ai från utvecklaren och användarna
Uppackning och första flygning.
Testflygning av drönaren inom räckvidd med 4G -anslutning. Den totala flygtiden var 29 minuter vid en genomsnittlig horisontell flyghastighet på 58 km / h (16 m / s). Under denna tid kunde drönaren köra 27 km. Du kan också märka att flygningen genomfördes i starka vindförhållanden, vilket ständigt varnades av dronesystemet.
.







