
- 1 Introduction
- 2 Le développeur à propos de la machine
- 3 Fonctionnalités
- 4 Package sommaire
- 5 Spécification
- 5.1 Drone
- 5.2 Communication
- 5.3 Système de navigation
- 5.4 Skycontroller 4
- 5.5 Batterie intelligente de l'avion
- 5.6 App
- 5.7 Caméra
- 5.8 Modes de vol autonomes
- 5.9 Cybersécurité
- 5.10 SDK Parrot
- 6 Apparence
- 7 Communication
- 7,1 4G
- 7,2 Max. avec connexion 4G
- 7,3 Wi-Fi
- 7,4 Vidéo en direct
- 8 Caméra
- 8.1 Matrice 48MP
- 8.2 Objectif
- 8.3 Modes vidéo
- 8.4 Encodage vidéo
- 8.5 HDR
- 8.6 Modes photo
- 9 Stabilisation hybride
- 9.1 Cardan de la caméra principale
- 10 Photogrammétrie
- 10.1 Inspection et cartographie
- 10.2 Capacités IA et 4G
- 10.3 Vol autonome
- 11 Photogrammétrie ou lidar
- 11.1 Les pros de la photogrammétrie
- 11.2 LIDAR contre
- 12 SDK
- 12.1 Air SDK
- 12.2 Ground SDK
- 12.3 OpenFlight
- 12.4 Sphinx
- 12,5 Olympe
- 12,6 PdrAW
- 12,7 Modèles C. A. D.
- 12,8 Compatibilité MAVLink et GUTMA
- 13 Plus grand écosystème de partenaires pour les drones Parrot
- 13,1 Parrot pour tout besoin professionnel
- 14 Cybersécurité
- 14.1 Confidentialité des données
- 14.2 Conforme FIPS140 -2 et certifié par CC EAL5 Secure Element
- 14.3 Connexion sécurisée 4G et authentification forte
- 14.4 Initialisation et mise à niveau sécurisées
- 14.5 Configuration des clés utilisateur sur l'élément sécurisé
- 14.6 Photos signées numériquement
- 14.7 Transparence et contrôle de sécurité continu avec Bug bounty
- 15 Gestion des données
- 15.1 Données collectées
- 15.2 Utilisation finale des données collectées [1 26]
- 15.3 Amélioration de l'intelligence artificielle (IA)
- 16 Caractéristiques de vol
- 16.1 Caractéristiques aérodynamiques
- 16.2 Actionneurs et aérodynamique
- 16.3 Capteurs
- 16.4 Caractéristiques des capteurs
- 16,5 Pilote automatique
- 17 Vol autonome
- 17,1 Caractéristiques principales
- 17.2 Stratégie du système de perception
- 17.3 Capteurs
- 17.4 Double suspension
- 17.5 Reconstruction de l'environnement
- 18 Missions de vol
- 18.1 Caractéristiques principales
- 19 Prix et disponibilité
- 20 Télécharger la documentation
- 21 Vidéos
Introduction [16 4]
Parrot Anafi Ai est une toute nouvelle solution unique de un développeur français bien connuune utilisation commerciale
La carte de visite d'Anafi Ai est le module 4G intégré, grâce auquel le drone a pu utiliser la quatrième génération de communications mobiles comme principal canal de transmission de données entre le drone et l'équipement de contrôle, qui en fait supprime toutes les restrictions sur la plage de vol et prédétermine le fonctionnement de l'UAV en dehors de la ligne de mire. Pour l'avenir, on note que le potentiel déclaré de la machine s'est avéré incroyablement puissant et correspond plus que jamais à son apparence futuriste, qui s'est inspirée de la nature pour créer des ingénieurs français.
Le développeur à propos de la voiture
Martin Liné, directeur marketing chez Parrot, les drones Parrot

Caractéristiques
Principales caractéristiques du Parrot Anafi Ai:
- Poids 898 grammes
- Temps de vol 60 secondes
- Conception pliable portable unique
- Module de communication 4G intégré pour une interaction complète drone/équipement de contrôle sans restrictions dans toutes les conditions environnementales
- Compatible avec LTE dans le monde entier
- Equipé d'un système de transmission de signal omnidirectionnel (4 antennes directionnelles avec réflecteur (avec gain: antennes 2,5 dBi/s). Le drone détermine la meilleure paire d'antennes en fonction de son orientation et de sa position par rapport à la position du pilote)
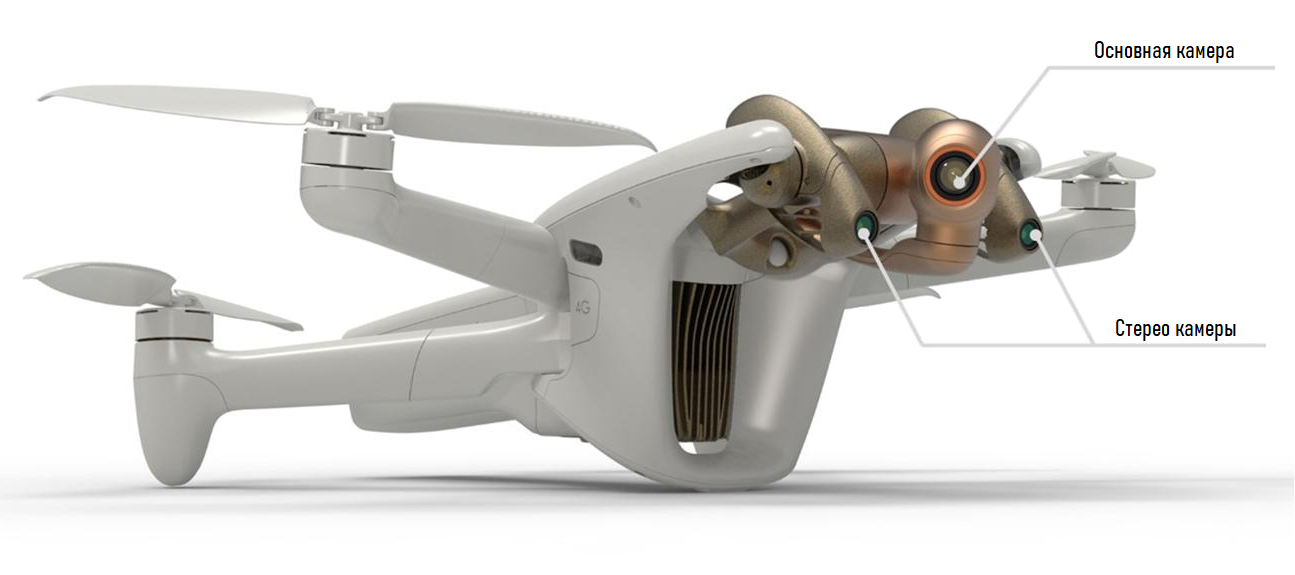
- Équipé d'un système d'imagerie omnidirectionnel unique du monde environnant construit sur une paire de caméras stéréoscopiques montées sur un cardan spécialisé avec une plage de panoramique de 330 degrés (de -120 ° à 210 °), travailler en tandem avec un système d'optimisation intelligent. trajectoires de vol
- Adapté pour le vol intérieur
- Streaming vidéo en direct en 1080p avec une faible latence (300 m/s) sans restriction de portée partout dans le monde, avec un débit vidéo de 12 Mbps
- Possibilité de transférer des fichiers vers le stockage cloud directement en vol
- Module de communication Wi-Fi intégré (Wi-Fi 802.11a / b / g / n) pour un contrôle complet des interactions drone / équipement (comme une option de connexion alternative)
- Esclave. Plage de fréquences Wi-Fi: 2,4 GHz / 5,8 GHz
- Max. portée de vol FPV sur Wi-Fi: 9 km
- Mode de fonctionnement automatique unique des modules 4G/Wi-Fi, qui permet, en fonction de l'encombrement du réseau, de passer en toute transparence d'une technologie de communication à une autre sans perte de données
- Classe de protection Drone IPX3
- Max. temps de vol 32 min
- Max. vitesse de vol horizontale 61 km / h
- Max. résistance au vent: 13 m/s
- Max.plafond au-dessus du niveau de la mer à 5000 m
- Caméra 4K 48MP construite sur une matrice CMOS 1/2 pouce avec une taille de pixel de 0,8 m; avec matrice de filtres couleur Bayer intégrée
- Objectif optique LD-ASPH
- Système de stabilisation d'image hybride à 6 axes (EIS numérique à 3 axes mécaniques à 3 axes)
- Contrôlable plage de fonctionnement Gimbal -90 ° à 90 °
- Zoom numérique 6x sans perte (2x 4K / 4x FHD)
- Max. Débit binaire vidéo 200 Mbps
- Formats d'enregistrement vidéo HDR8 / HDR10
- Max. plage dynamique 14EV
- Profil de couleur P-log pour le post-traitement
- 5 × modes de vol et de prise de vue automatiques (Photogrammétrie / Plan de vol / Caméraman / Smart RTH / Véhicule)
- Emplacements intégrés pour cartes MicroSD et SIM
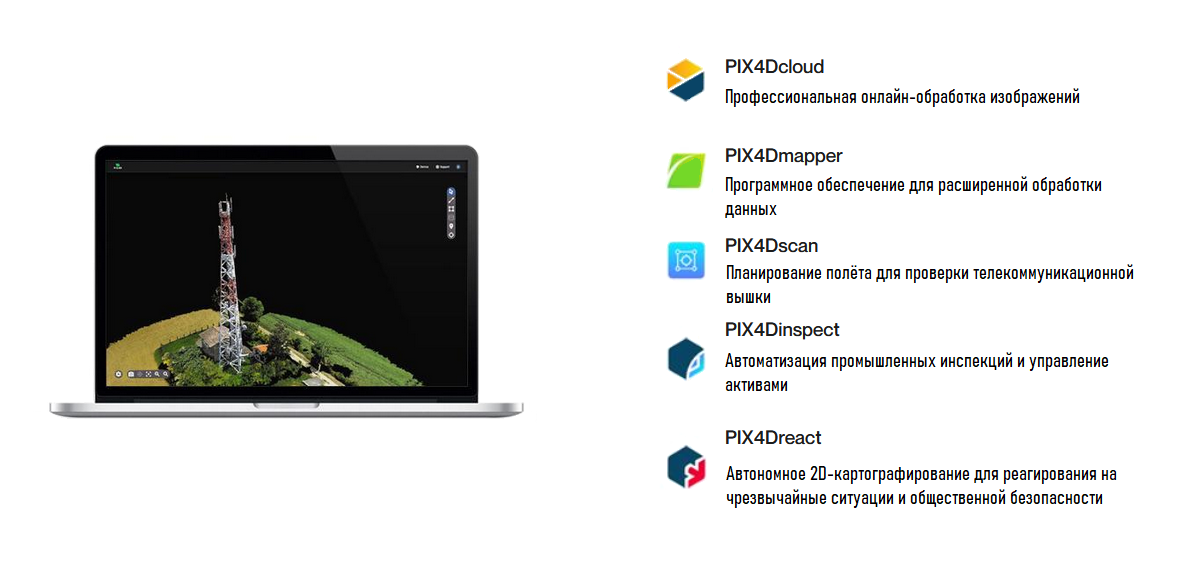
- Compatible avec PIX4D Suite
- Les modes de vol photogrammétriques sont disponibles dans mob. Application FreeFlight 7 et logiciel OpenFlight
- Création de plan de vol en un clic
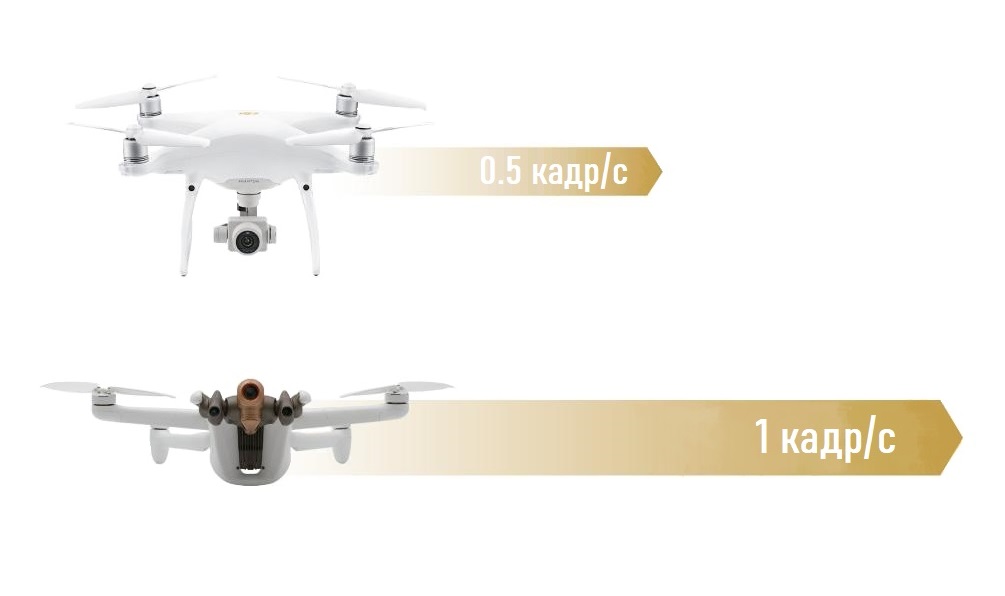
- Photogrammétrie 48MP 1 ips: deux fois plus rapide que les concurrents
- Précision de prise de vue: 0,46 cm/pix. GSD à 30m
- Prise en charge du SDK Parrot (avec la possibilité d'intégrer votre code dans le drone à l'aide du SDK Air, de créer des applications mobiles à l'aide du SDK Ground, de configurer une station au sol open source à l'aide d'OpenFlight, d'interagir avec le Sphinx moderne outil de simulation de drone ainsi que scripts Python avec Olympe et traitement de vidéo et de métadonnées avec PdrAW)
- Compatible avec les logiciels tiers: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- ANAFI Ai est conforme à General Réglementation Règlement sur la protection des données de l'Union européenne (RGPD)
- Confidentialité supérieure des données avec l'élément sécurisé WISeKey NIST FIPS140-2 de niveau 3 intégré avec certification Common Criteria EAL5
- La vidéo et les contrôles sont protégés par SRTP / DTLS conformément vers webRTC
- Nouvel équipement de commande portable Parrot Skyco ntroller 4
- Nouvelle application mobile Parrot FreeFlight 7

Package
Le développeur propose le drone en une seule configuration, qui comprendra:
- Drone ANAFI Ai
- Mallette de transport rigide
- Équipement de contrôle Parrot Skycontroller 4
- 1 × Smart batterie
- Chargeur USB-PD
- Kit d'hélice de rechange (2CW / 2CCW)
- Câble d'accompagnement (USB-C vers Lightning)
- 2 × câbles d'accompagnement (USB -C à USB-C)
- Tableau d'étalonnage

Spécifications
Avion

Communication
Système de navigation
Skycontroller 4

Aircraft Intelligent Battery
App

Appareil photo

Modes de vol autonomes
Cybersécurité
Parrot SDK
Ensuite, vous peut vous familiariser avec les informations clés du Parrot Anafi Ai, qui vous permettront d'en savoir plus sur le potentiel déclaré de la machine, ainsi que les améliorations qui ont été mises en œuvre par rapport à la version commerciale du drone Parrot Anfi Thermique et autres drones de grandes marques.
Apparence





Communication
4G
ANAFI Ai comprend un module radio 4G (en plus de le module radio Wi-Fi), qui permet de diffuser un flux vidéo en qualité 1080p avec un débit maximum de 12 Mbps, avec une latence très faible (300 ms), sans limitation de portée et partout dans le monde.
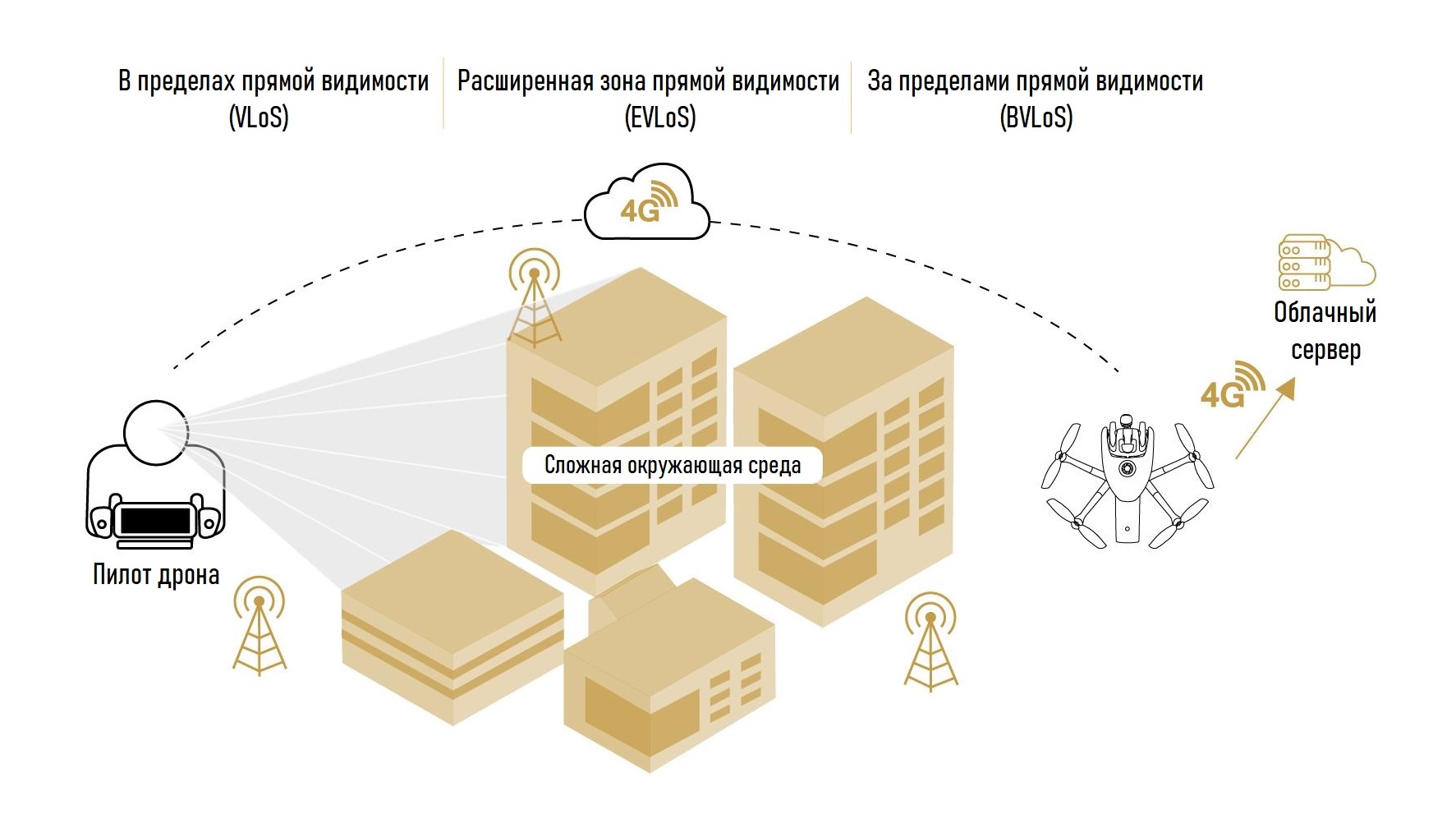
Compatibilité
Le module ANAFI Ai 4G prend en charge plus de 28 bandes de fréquences, couvrant plus de 98 % des fréquences déployées dans le monde.
Automatic Network Switch
La qualité et la bande passante des réseaux 4G et Wi-Fi sont mesurées toutes les 100 ms pour adapter le streaming aux conditions du réseau. Combiné à des algorithmes de routage, la connexion entre le drone et son contrôleur est maintenue même lorsque le Wi-Fi est gravement perturbé. Ainsi, lorsque la bande passante effective (bande passante utilisable) du Wi-Fi est inférieure à 1,5 Mbps, le système basculera automatiquement en 4G.
Pour limiter la consommation de données mobiles lorsque le pilote est à portée du réseau Wi-Fi du drone, le passage de la 4G au Wi-Fi s'effectue également automatiquement sans couper le flux vidéo.
Max. avec une connexion 4G
La vidéo du développeur montre le max. portée de vol d'Anafi Ai avec connexion 4G dans une direction sur une seule charge de batterie. Le temps de vol total était de 29 minutes à une vitesse de vol horizontale moyenne de 58 km/h (16 m/s). Pendant ce temps, le drone a pu couvrir 27 km. Vous pouvez également remarquer que le vol a été effectué dans des conditions de vent fort, ce qui a été constamment averti par le système de drone.
Implémentation d'algorithmes d'optimisation de flux vidéo
Contrôle de congestion 4G
L'algorithme de contrôle de congestion permet:
- Mesurer la perte de paquets sur l'ensemble du cycle du réseau.
- Retard de mesure (temps d'aller-retour).
- Ajustez la bande passante en fonction de ces deux paramètres.
Le but ultime de l'algorithme est de maximiser la bande passante disponible tout en maintenant la latence la plus faible possible. Cet algorithme est implémenté sur chacune des interfaces disponibles dans le drone, chacune avec ses propres paramètres, optimisés en fonction du réseau. Sur la base des informations fournies par cet algorithme, le gestionnaire de liens prend des décisions de routage et d'interface active.
Contrôle du drone via une connexion 4G
ANAFI Ai se connecte à la télécommande via 4G en moins de 30 secondes si le drone est hors de portée du Wi-Fi, et en moins de 15 secondes si le drone est à portée Wi-Fi. Et la connexion 4G fournit également:
- Détection et lancement d'une connexion basée sur le protocole VOIP SIP.
- Utilisez un serveur relais pour établir des connexions sur des réseaux sécurisés.
Performances du flux vidéo
- Latence: 300 ms.
- Sécurité: la vidéo et les contrôles sont protégés par SRTP / DTLS selon webRTC.
- Antennes: 28 bandes LTE de 700 MHz à 2,6 GHz.

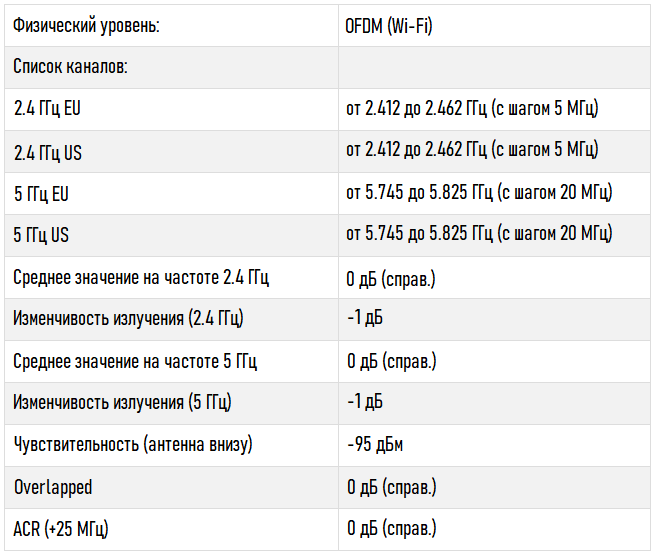
Wi-Fi
Système de transmission omnidirectionnel
- ANAFI Ai a 4 antennes à réflecteur directionnel (avec gain d'antenne: 2,5 dBi/s). Le drone détermine la meilleure paire d'antennes en fonction de son orientation et de sa position par rapport à la position du pilote.
- Avec un gain recombiné de 3,5 / - 1,5 dBi dans le plan horizontal du drone, le gain RF ANAFI Ai est très homogène.
- Le rayonnement de l'antenne en aval a été amélioré de 4 dB par rapport à ANAFI.
Conception externe de la radio haute puissance
L'avant de la radio maximise la puissance à la base de l'antenne avec une très bonne linéarité et sensibilité (-94 dBm à 6,5 Mbps) pour atteindre la puissance de limitation FCC maximale.

Fiabilité Wi-Fi
Paramètres 802.11
faible bande passante, faible latence, variabilité du niveau de réception due à la vitesse du drone, longue portée, présence d'interférences. Ces paramètres incluent l'agrégation, les nouvelles tentatives, la technologie MiMo (STBC), le débit de données de la trame de contrôle et les conditions de déconnexion.
Intelligent Interference Prevention
ANAFI Ai dispose d'un algorithme de suppression de canal (2,4 GHz et 5 GHz bi-bande) en cas d'interférence.
Adaptation et suivi des flux
L'ANAFI Ai surveille en permanence l'état de sa liaison 4 Hz et peut détecter des interférences. Cela vous permet d'optimiser dynamiquement la bande passante et la taille des paquets transmis. Il alerte également le pilote s'il se trouve dans un environnement particulièrement brouilleur ou s'il est sur le point de perdre le signal.
Réduction de bande passante
A la limite de sa portée et si les conditions le permettent, ANAFI Ai peut passer à la bande passante de 10 MHz pour améliorer sa sensibilité de 3 dB et augmenter la portée de 40 %.

Indicateurs radio
Diffusion vidéo
Indicateurs de liaison vidéo
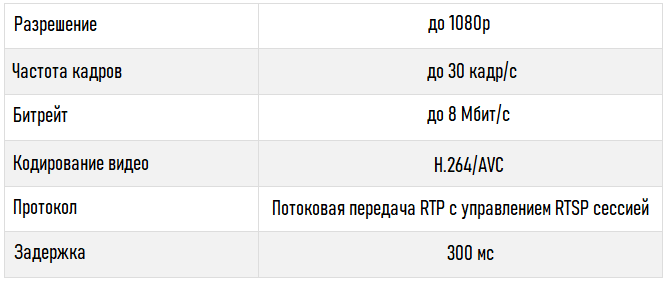
Implémentation d'algorithmes d'optimisation de flux vidéo
Parrot Gen4 Streaming (4e génération)
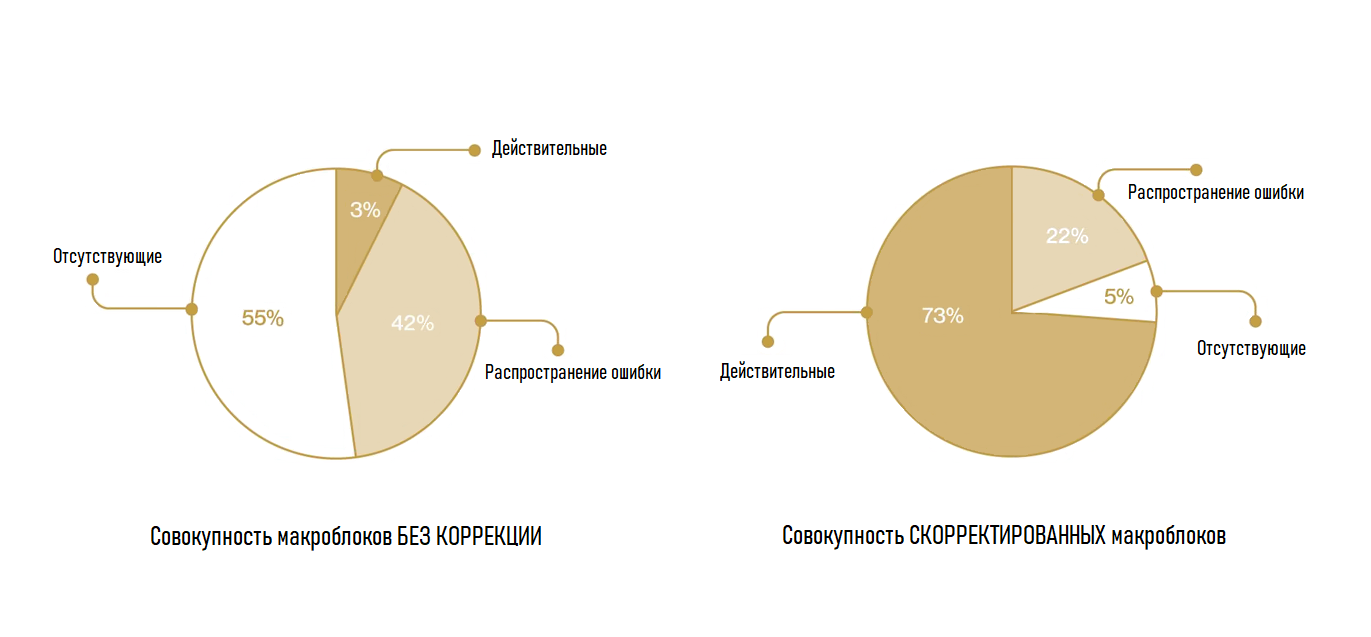
Cet algorithme réduit l'impact visuel des pertes de réseau et assure l'interopérabilité tous les décodeurs, tout en fournissant un flux syntaxiquement complet: les parties manquantes de l'image sont reconstituées en parties manquantes, identiques à celles de l'image de référence.
Ainsi, les défauts sont contenus dans les zones sujettes à la perte et ne s'appliquent pas à l'ensemble de l'image.
Les graphiques ci-dessous montrent le taux de réussite du décodage de macroblocs à 5 % de perte de réseau - avec et sans les fonctionnalités de streaming avancées d'ANAFI Ai. L'algorithme assure un décodage correct de 75 % des macroblocs. Ils permettent à l'utilisateur de poursuivre sa mission sans geler l'écran ni perdre le streaming.
Congestion Control
L'algorithme évalue également l'environnement Wi-Fi et radio pour anticiper et éviter la perte de paquets et la congestion du réseau, ce qui contribue à réduire la latence. L'algorithme est basé sur une estimation de la capacité du canal, calculée sur la base du débit de données et du taux d'erreur au niveau de la couche physique; il affecte ensuite les paramètres de codage et d'encapsulation du réseau.
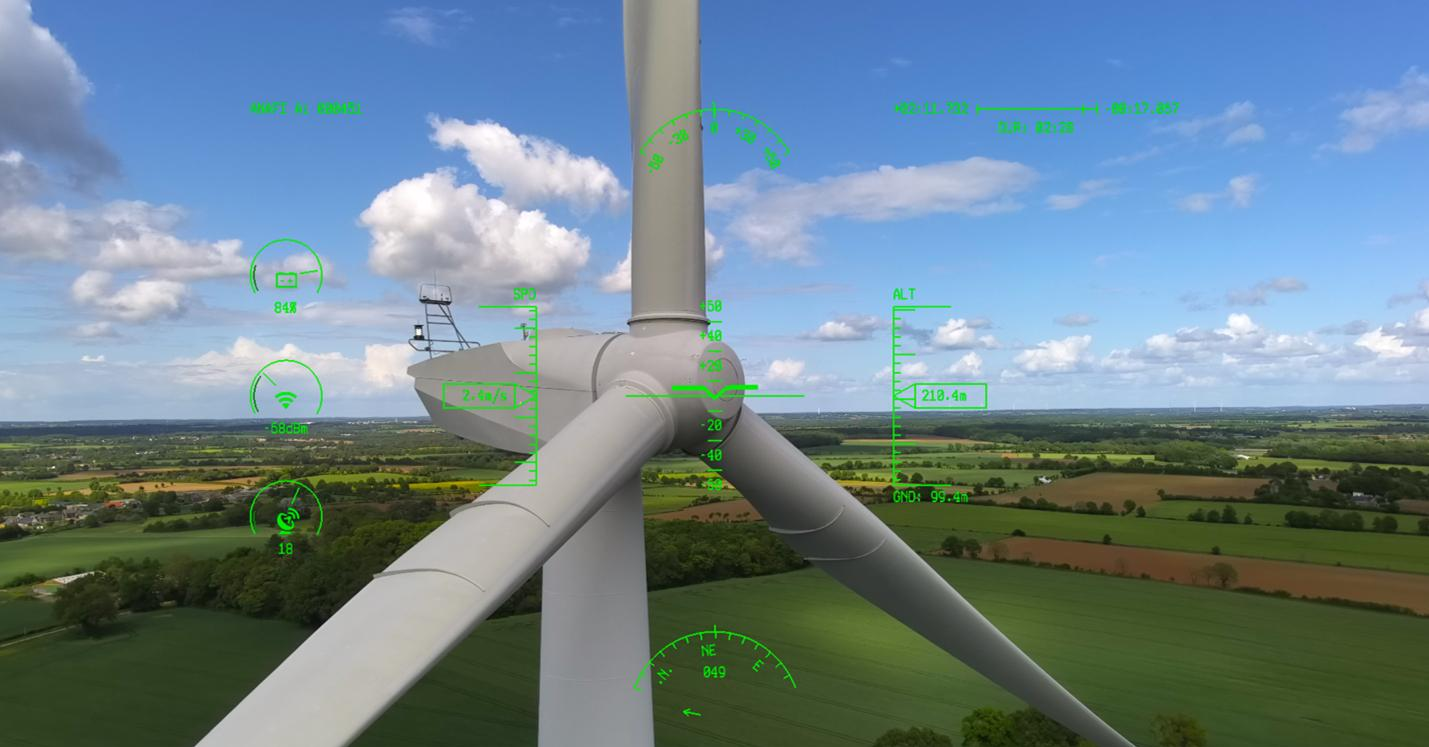
Métadonnées
Les métadonnées sont transmises avec le flux vidéo. Ils contiennent notamment des éléments de télémétrie drone (position, altitude, vitesse, niveau de batterie, etc.) et des métriques vidéo (angle de caméra, valeur d'exposition, champ de vision, etc.).
La synchronisation des images et des métadonnées ouvertes remplit les fonctions de positionnement précis sur la carte, de suivi des instruments de vol dans le HUD ou d'activation d'éléments de réalité augmentée.
Les métadonnées sont incluses à l'aide de méthodes standard (extension d'en-tête RTP); le format de données défini par Parrot est open source: il est disponible dans le SDK ANAFI Ai.
Caméra

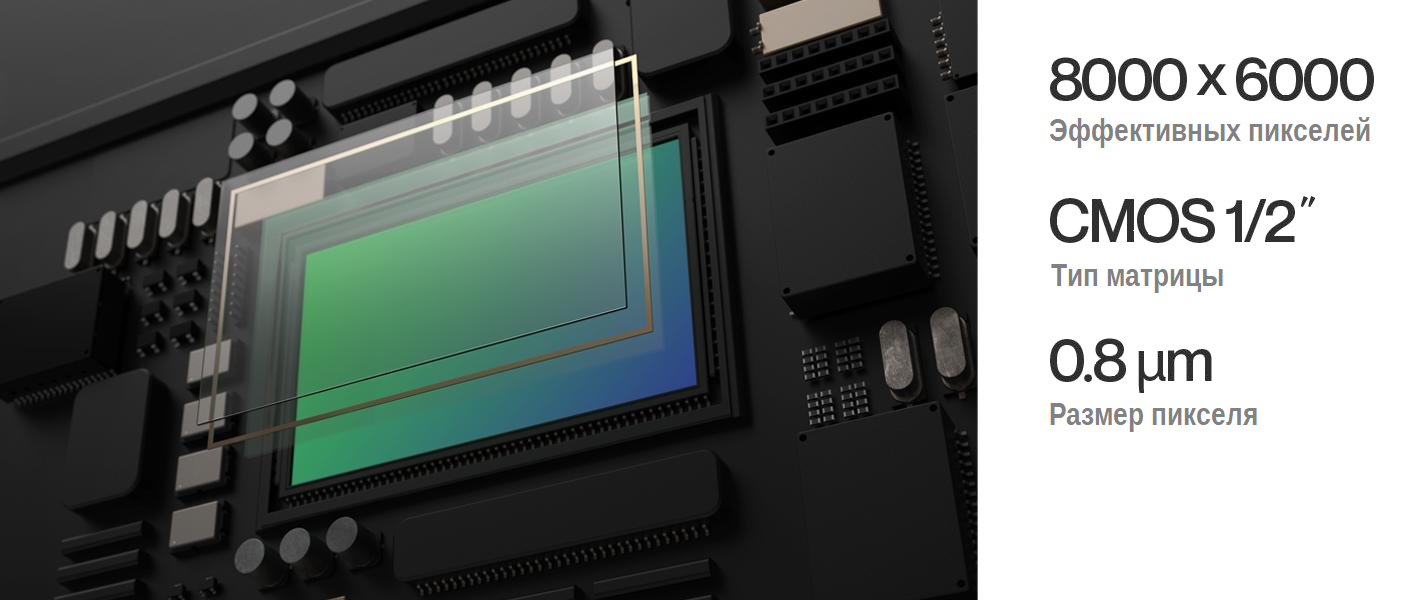
Capteur 48MP
La matrice ANAFI Ai comprend un grand nombre de mégapixels pour une photographie aérienne détaillée.
Il utilise la technologie de matrice de filtres de couleur de Quad Bayer, où des groupes de 4 pixels adjacents ont la même couleur. Ainsi, la capture HDR en temps réel peut être obtenue en mode photo et vidéo en ajoutant les signaux de quatre pixels adjacents.
Sa plage dynamique est 4 fois celle des matrices de Bayer standard. Même des scènes complexes peuvent être filmées avec un minimum de surbrillance ou de perte de détails d'ombre.
Objectif
L'objectif ANAFI Ai a été spécialement développé pour Parrot. Il combine 6 éléments asphériques et est optimisé pour réduire les reflets optiques. Cet objectif donne 68° HFoV en mode vidéo standard et 64,6° HFoV en mode photo standard.

Modes vidéo
ANAFI Ai capture une vidéo 4K fluide à 60 images par seconde, y compris P-Log, ainsi que HDR10 4K vidéo jusqu'à 30fps. Le tableau ci-dessous répertorie tous les modes vidéo ANAFI Ai.

Encodage vidéo
Les utilisateurs peuvent choisir entre H.264 (AVC) et H.265 (HEVC).
Toutes les résolutions utilisent les formats de pixels suivants:
- YUV420p (espace colorimétrique 8-bpc BT.709) pour le mode standard et HDR8.
- YUVJ420p (8 bits / composante, gamme complète - espace colorimétrique BT.709) pour le style P-log.
- YUV420p10 (espace colorimétrique BT.2020 10bpc) pour l'enregistrement HDR10, H.265 uniquement.
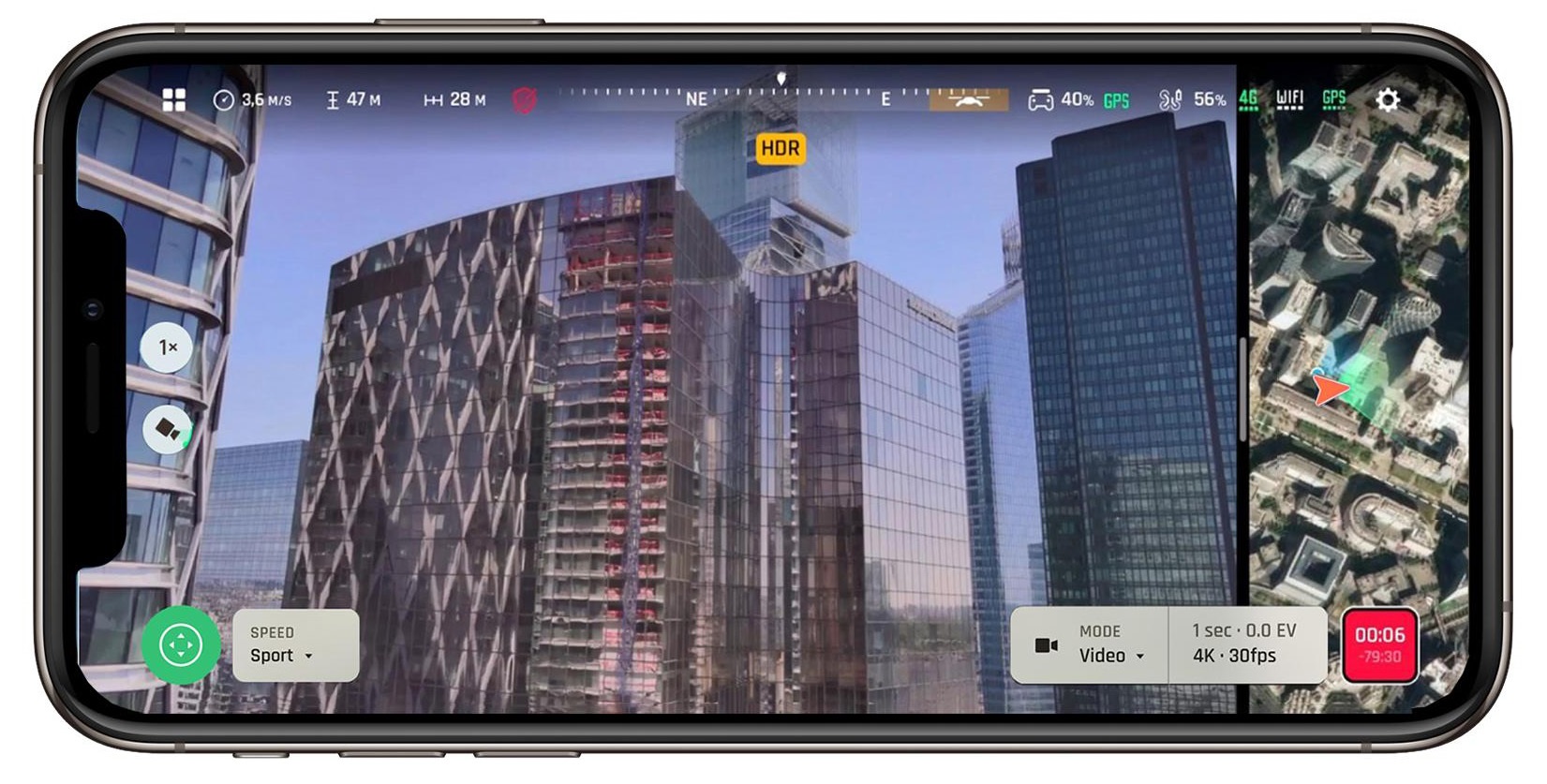
HDR
Lors de l'enregistrement vidéo en HDR8 et HDR10, ANAFI Ai couvre une plage dynamique de 14EV. Le format HDR10 offre une luminosité maximale de 1000 nits et une profondeur de couleur de 10 bits. Il fournit une gamme de couleurs d'un milliard contre 16 millions pour la plage dynamique standard. Par rapport au HDR8, le HDR10 produit des images plus de deux fois plus lumineuses avec une augmentation correspondante du contraste. HDR8 peut être affiché sur n'importe quel écran standard, tandis que HDR10 est destiné aux téléviseurs et aux écrans HDR10.
Modes photo
Description des modes
La section Mode Control contient des paramètres qui affectent le nombre de photos prises à chaque fois que l'obturateur est relâché.
Mode de capture unique
Mode de capture unique standard. Après chaque déclenchement, l'image capturée est immédiatement traitée par le système.
Mode bracketing
Les utilisateurs peuvent prendre une série de 3, 5 ou 7 vues avec une exposition différente pour chaque vue. Les préréglages suivants sont disponibles:
- [-1 EV, 0, 1 EV] (réglages par défaut)
- [-2 EV, -1 EV, 0, 1 EV, 2 IL]
- [-3 IL, -2 IL, -1 IL, 0, 1 IL, 2 IL, 3 IL]

Mode rafale
Le mode rafale permettra à l'utilisateur de prendre une rafale de 10 images en 1 seconde.
Mode Panorama
Le mode Panorama comprend quatre prises de vue panoramiques différentes:
- Sphérique (360 °) est un mode panoramique comprenant trois options pour prise de vue d'un panorama sphérique: Sphère / Petite Planète / Tunnel.
- Horizontal (180 °)
- Vertical (109 °)
- Superwide - nouveau super mode d'assemblage large 9 images (HFOV 110°, panorama droit)
Pour plus de détails sur les spécifications du mode panorama, voir le tableau ci-dessous:

Mode Timelapse
Ce mode vous permet de prendre des photos aux intervalles de temps fixes suivants:
- 48MP: 1, 2, 4, 10, 30 ou 60 secondes.
- 12MP: 0,5, 1, 2, 4, 10, 30 ou 60 s.
Mode GPS Lapse
Ce mode photo a été développé pour l'inspection et la photogrammétrie. Il vous permet de prendre des photos aux intervalles de distance fixes suivants: 5, 10, 20, 50, 100 ou 200 mètres.
Le tableau ci-dessous indique les modes et résolutions de capture d'images fixes, y compris le mode de lecture du capteur:
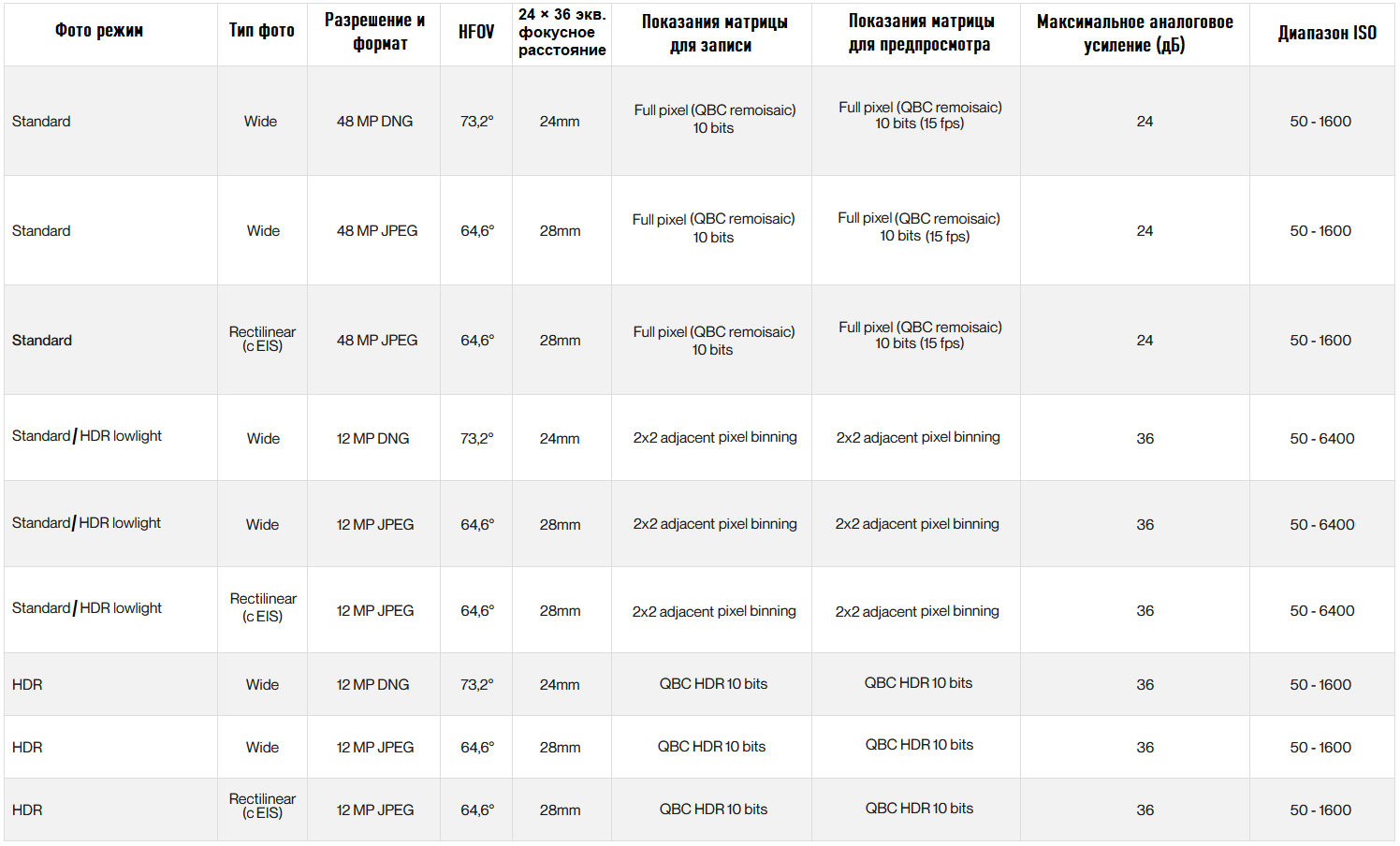
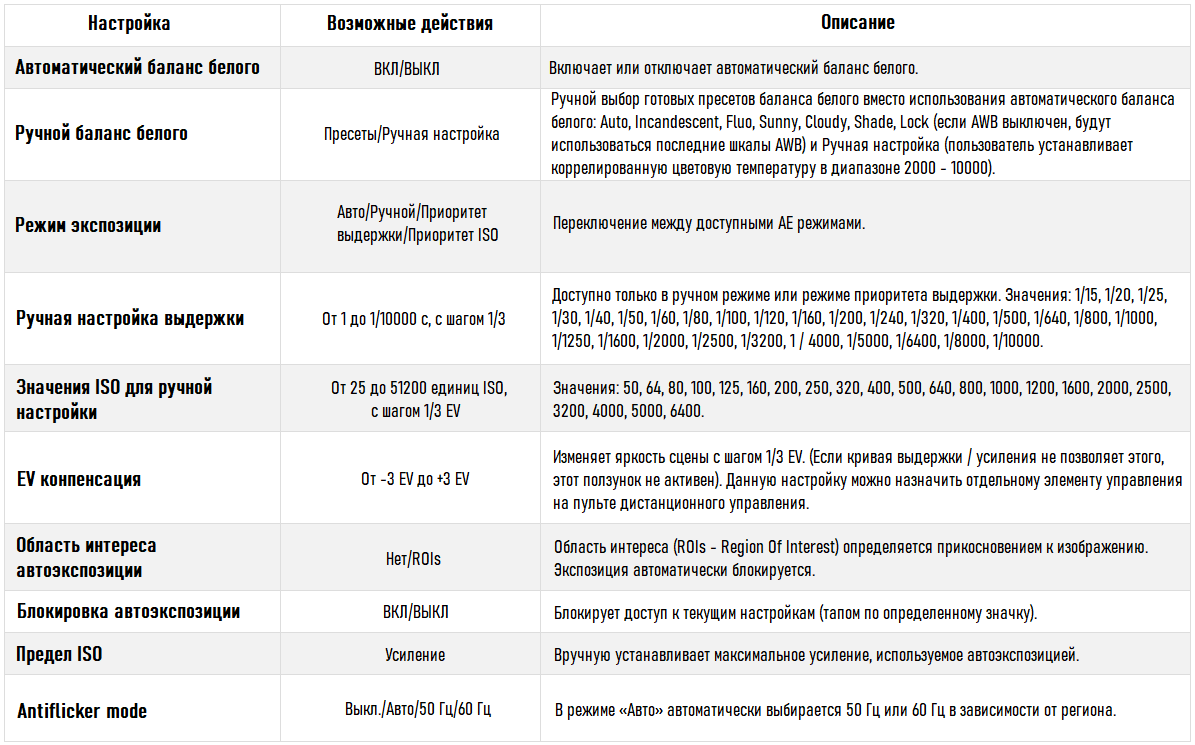
Paramètres
Dans les Le tableau répertorie les paramètres disponibles pour chaque mode.
Zoom 6x
Le zoom est disponible dans tous les modes photo et vidéo. Combinés à un capteur de 48 mégapixels, des algorithmes de netteté précis produisent des images haute définition même en utilisant le zoom numérique 6x. Les utilisateurs d'ANAFI Ai peuvent désormais voir des détails de 1 cm à une distance de 75 m. Le nombre élevé de pixels permet également de recadrer la vidéo 4K à 1080p sans perte de qualité.

Stabilisation hybride
ANAFI Ai possède la stabilisation la plus précise du marché des micro drones.
Il combine la stabilisation combinée:
- Mécanique 3 axes (3 axes méc. Cardan)
- 3 axes électroniques (EIS)
La stabilisation mécanique stabilise l'axe de pointage de la caméra quelle que soit la position de vol du drone. La stabilisation électronique de l'image corrige l'effet des micro-vibrations pour les fréquences supérieures à 100 Hz, que l'entraînement mécanique ne peut pas gérer.
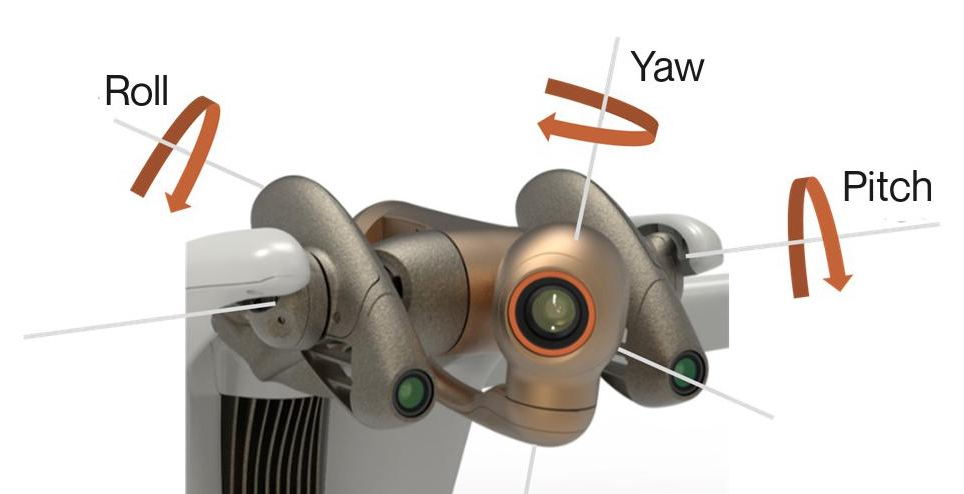
Cardan de la caméra principale
La stabilisation mécanique vous permet de stabiliser et d'orienter l'axe horizontal de la vue de la caméra dans les 3 axes.
 3 axes de rotation méc. suspension de la caméra principale ANAFI Ai.
3 axes de rotation méc. suspension de la caméra principale ANAFI Ai.
Caractéristiques principales
- Cardan mécanique à 3 axes pour caméra principale
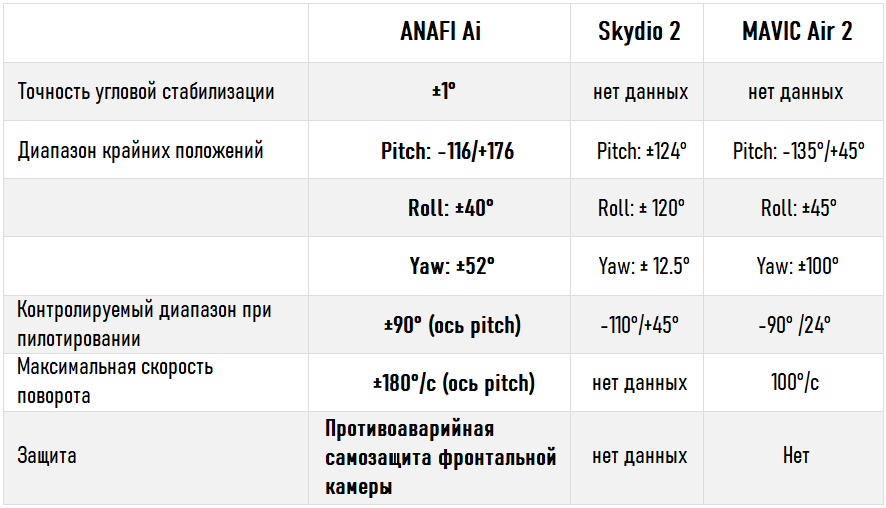
- Décalage vertical 292 °, champ de vision -116 ° à 176 °
Performances de la nacelle
- L'algorithme EIS corrige les effets d'oscillation et de distorsion de l'objectif grand angle et effectue également une image numérique sur 3 axes stabilisation (Roll, Pitch et Yaw).
- La méthode consiste à appliquer une transformation géométrique de l'image. La transformation géométrique est associée à l'horodatage et à la position exacte grâce à l'IMU.
- Une transformation géométrique est appliquée à chaque image en fonction de la distorsion optique, des vibrations et des mouvements de l'unité de caméra mesurée.
Plage de pivotement 292 °
La caméra a une plage de pivotement horizontal de -116 ° / 176 ° autour de l'axe de tangage, fournissant ainsi une observation au-dessus et au-dessous du drone, qui est un opportunité unique sur le marché des micro-drone.
![]()
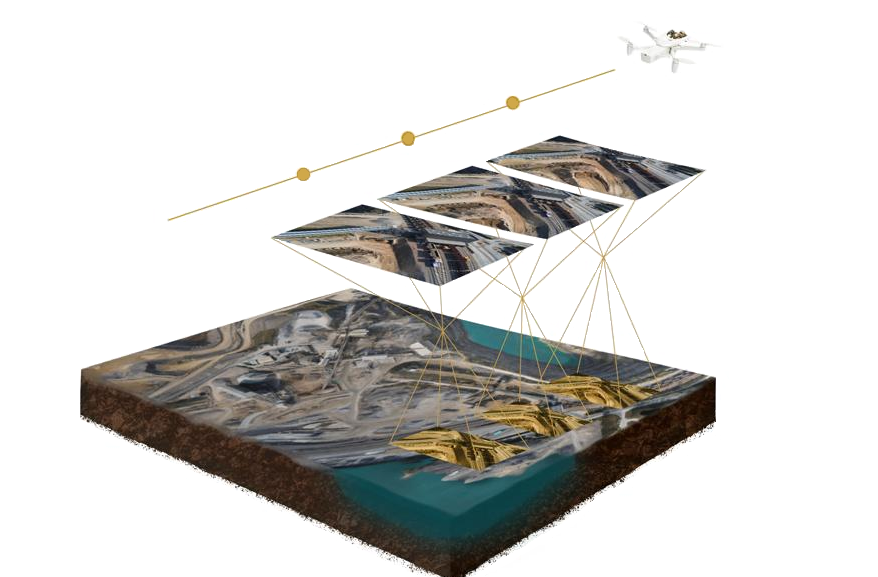
Photogrammétrie
La photographie aérienne avec des véhicules aériens sans pilote change la façon dont les spécialistes effectuent les inspections et les levés. Les méthodes de photogrammétrie sont utilisées pour traiter les images collectées par les drones afin de créer des modèles 2D et 3D, qui permettent plus tard aux clients de planifier la maintenance des objets étudiés en temps opportun.
La 4G offre une fiabilité sans précédent de la liaison de données des drones. Les utilisateurs peuvent utiliser des drones sur de vastes zones, à proximité de structures métalliques, de bâtiments, sans crainte de perte de communication.
Inspection et cartographie
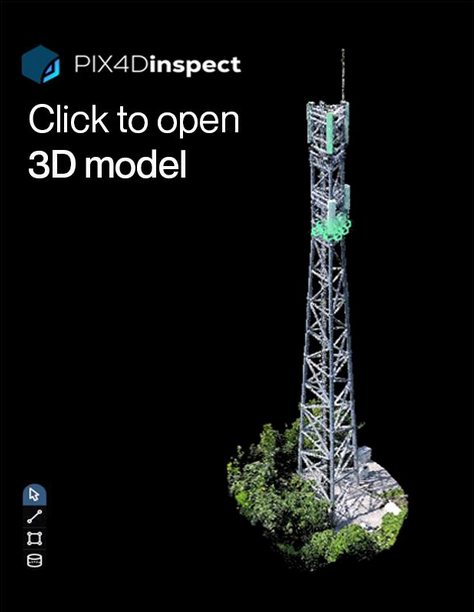
En combinant l'IA du drone ANAFI Ai avec la plateforme en ligne PIX4Dinspect, les utilisateurs pourront effectuer inspections plus rapides et plus efficaces que jamais. Les algorithmes d'apprentissage automatique reconnaissent les antennes des tours cellulaires, déterminent leur taille, leur hauteur, leur inclinaison, leur azimut et leur verticalité.
Cliquez sur les images ci-dessous pour visualiser les modèles 3D de démonstration générés par ANAFI Ai.
Exemple # 1

Exemple # 2
Meilleure matrice de sa catégorie
La caméra du drone ANAFI Ai est équipée d'un capteur CMOS 48MP 1/2 pouce construit à l'aide de la technologie de filtre couleur Quad Bayer, plus adaptée que jamais à l'inspection et à la photogrammétrie. La matrice utilisée permet d'obtenir des images détaillées avec une large plage dynamique.
Photos haute résolution
ANAFI Ai est capable de générer des images fixes de 48 mégapixels, capturant ainsi tous les détails en haute résolution et créant un nuage de points à haute densité.
Netteté importante
Les missions d'inspection nécessitent la capacité d'identifier des détails infimes tels que les numéros de série, les connecteurs, les taches de rouille et les fissures naissantes.
Large plage dynamique
10 arrêts de plage dynamique en mode standard, 14 arrêts en mode HDR. Une gradation optimale de l'image est essentielle pour créer des points de nuages cohérents et des reconstructions 2D ou 3D de haute qualité.
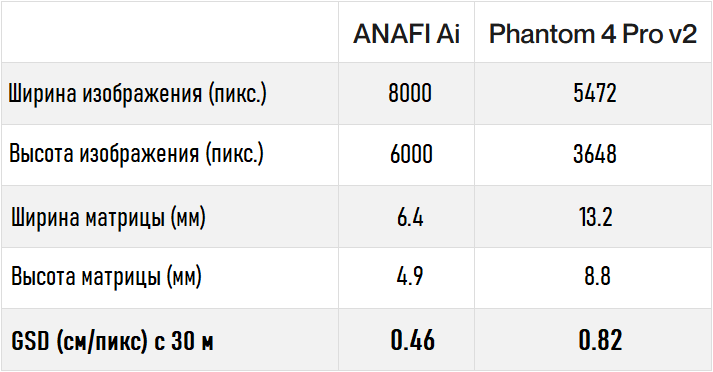
55% plus de détails que les capteurs 1 pouce
Le capteur Quad Bayer 48MP 1/2 pouce du drone ANAFI Ai est plus précis que les capteurs 20MP 1 pouce utilisés dans un certain nombre de drones professionnels modernes. Les images suivantes de l'inspection du toit ANAFI Ai et DJI Phantom 4 Pro V2.0 à la même hauteur démontrent clairement ce fait.

Idéal pour les inspections
Le cardan ANAFI Ai comprend un système de stabilisation hybride (mécanique électronique) à 6 axes qui compense les fluctuations de vol et assure la netteté de l'image. La caméra ANAFI Ai a une plage réglable de -90 ° à 90 °, ce qui en fait un instrument aéroporté idéal pour visualiser le dessous d'une base de pont.
Inclinaison contrôlable ± 90 °
Précision
ANAFI Ai permet aux utilisateurs d'atteindre un GSD de 0,46 cm/px à partir d'une hauteur de 30 m, ce qui signifie une précision relative de planimétrie jusqu'à 0,92 cm
A titre de comparaison, à la même hauteur le DJI Phantom 4 Pro V2 fournit un GSD de seulement 0,82 cm/px. En d'autres termes, ANAFI Ai peut cartographier la même cible, volant plus de 1,5 fois plus haut que le Phantom, avec un niveau de détail équivalent.
Capacités IA et 4G
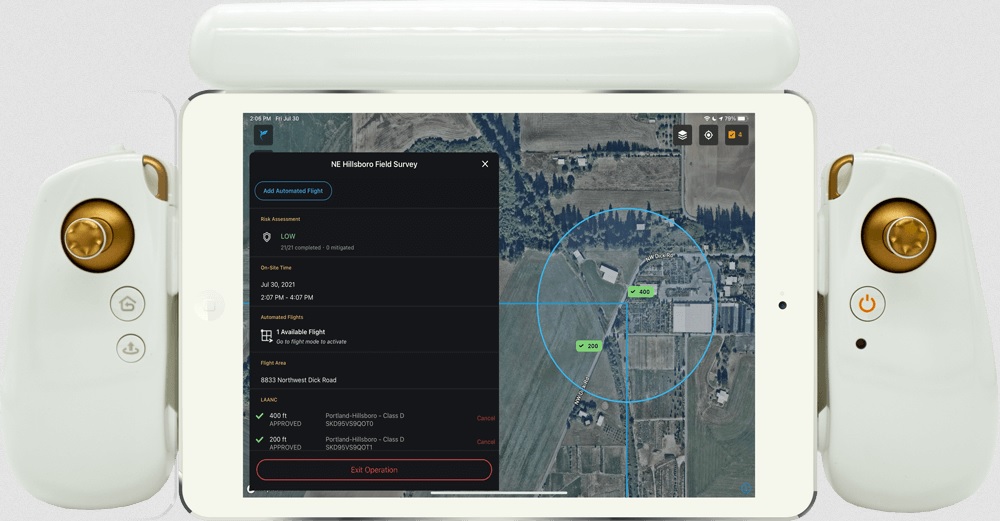
Une application. Tout plan de vol
Le potentiel de l'application mobile FreeFlight 7 permet à l'utilisateur de lancer toutes les missions de relevé, d'inspection et de photogrammétrie.

Modes de vol photogrammétriques disponibles
Les modes de vol photogrammétriques suivants sont désormais disponibles dans l'application mobile FreeFlight 7:
- Grille
- Double grille
- irculaire
Créez un plan de vol en un seul clic
Un simple clic sur la carte interactive FreeFlight 3D est tout ce dont vous avez besoin pour un bâtiment de numérisation rapide. L'intelligence artificielle détermine automatiquement les paramètres de vol et la trajectoire optimaux. Les images 48MP avec géoréférencement précis des capteurs ANAFI Ai (IMU, GNSS et Flight Time) permettent une reconstruction 3D précise.
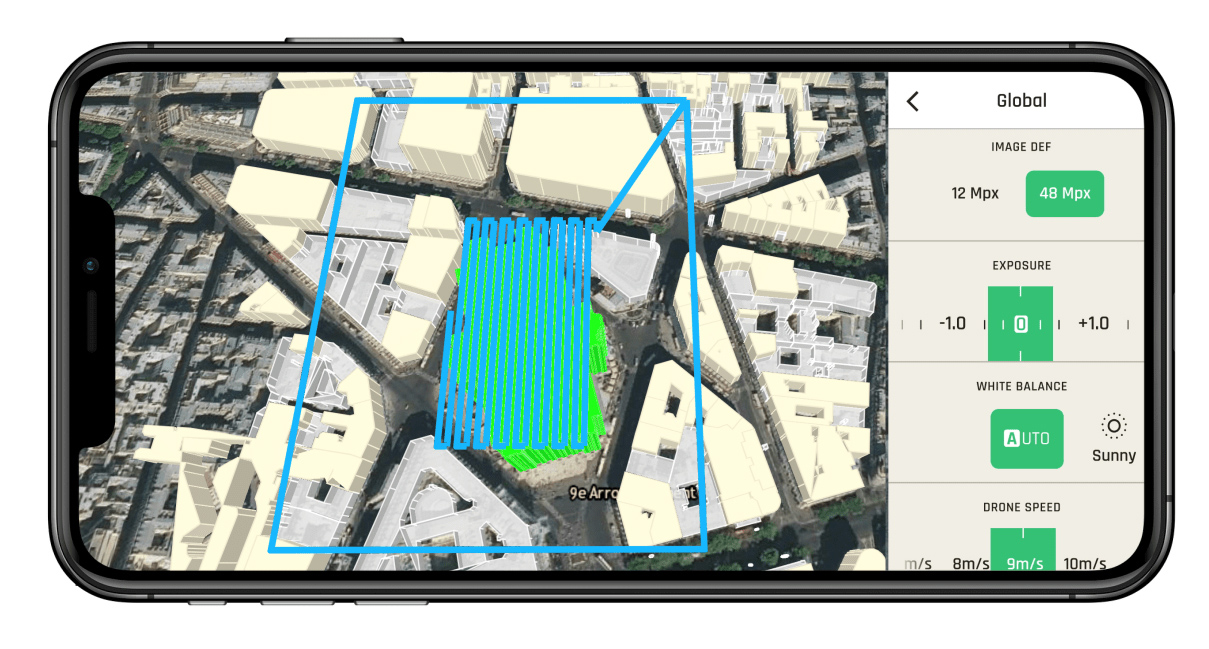 Plan de vol automatique créé en un clic dans le cadastre 3D.
Plan de vol automatique créé en un clic dans le cadastre 3D.
- L'arrière-plan cartographique de FreeFlight 7 provient du logiciel ArcGIS. La représentation 3D du bâtiment est basée sur les données OpenStreetMap couvrant les villes du monde entier.
- Les systèmes de visualisation assurent la sécurité d'un plan de vol donné: les utilisateurs n'ont pas à se soucier des obstacles. ANAFI Ai les évite de manière autonome.
Vol autonome
Le système de capteurs omnidirectionnels ANAFI Ai, basé sur la vision stéréoscopique, s'oriente automatiquement dans le sens de la marche.

Le drone détecte les obstacles qui se trouvent à 30 mètres. La technologie d'IA construit et met à jour en permanence la grille de remplissage tout en exécutant un plan de vol donné. Il représente l'environnement du drone en voxels.
Les algorithmes déterminent la meilleure trajectoire pour éviter de heurter des obstacles alors que le drone reste concentré sur sa cible: la mission de vol assignée.

Connexion 4G
ANAFI Ai est le premier microdron commercial équipé d'un module 4G. Il couvre plus de 98 % des fréquences utilisées dans le monde.

Enquête sur les lignes à haute tension. Tourné avec ANAFI Ai, édité avec Pix4Dmatic. Taille de la scène: 4060 × 60 × 70 m Nombre d'images: 2172. GSD: 1,3 cm/pixel. Hauteur: 90 m Recouvrement avant/côté: 90 % / 65 %.
Le drone est capable de passer en toute transparence du Wi-Fi à la 4G et vice versa, offrant ainsi la connexion la plus fiable, ce qui garantit à son tour:
- La capacité de effectuer des vols BVLOS
- Connexion stable même lorsque vous volez dans des environnements avec des obstacles et des bâtiments
- Vol en toute sécurité dans des environnements très bruyants
- Qualité de la liaison vidéo 1080p @ 30 fps
- Téléchargement direct des images vers les serveurs cloud

Optimisation du temps de vol
Selon le développeur, des gains de temps significatifs ont été réalisés grâce à la haute image caractéristiques de l'ANAFI Ai:
- 48MP permet au drone de voler plus de 1,5 fois plus haut que les drones dotés de capteurs 20MP de 1 pouce, tout en atteignant le même GSD. En d'autres termes, une altitude plus élevée et une mission plus rapide vont de pair.
- Photographie à 1 ips: ANAFI Ai prend des photos deux fois plus vite que Autel EVO 2 et DJI Phantom 4 Pro V2.0.
Transfert en vol 4G vers PIX4Dcloud
En cours de création d'un modèle numérique à partir de photographies aériennes d'un drone, transfert de fichiers et traitement les photos sont deux tâches chronophages. ANAFI Ai aide les utilisateurs à accélérer leur flux de travail. En particulier, le système de drone permet:
- Transférer des images vers des serveurs sécurisés directement pendant le vol grâce à la connexion 4G du drone.
- Lancer immédiatement le calcul des objets à la fin du vol: orthomosaïques, nuage de points, modèles d'élévation et maillage texturé.
- Partagez facilement des cartes 2D et des modèles 3D de qualité d'enquête avec les employés et les clients.
![]()
Compatibilité avec la suite PIX4D
ANAFI Ai est désormais entièrement compatible avec une suite unique d'applications de photogrammétrie mobiles, de bureau et dans le cloud comprenant:
Photogrammétrie ou lidar
Pourquoi choisir la photogrammétrie pour le levé et le levé? En plus de l'accessibilité et de la facilité d'utilisation, la photogrammétrie aérienne est le meilleur choix lorsqu'une interprétation visuelle des données est requise.
Professionnels de la photogrammétrie
- Fournit plusieurs visualisations: orthomosaïque, nuage de points de couleur, maillage texturé.
- Crée un nuage de points avec une densité plus élevée, dont chacun contient une quantité importante d'informations (hauteur, texture, couleur).
- Surpasse LIDAR en termes de précision des rendus photoréalistes 2D et 3D - LIDAR ne fournit pas un niveau élevé de détails contextuels.
LIDAR contre
- Coûte 100 fois plus cher qu'un drone avec une matrice RVB.
- La complexité du traitement des données et les erreurs d'interprétation possibles.
- L'ajout d'informations sur les couleurs est possible, mais cela complique le processus.
- Le LIDAR génère uniquement un nuage de points et est destiné à des cas et des situations spécifiques.
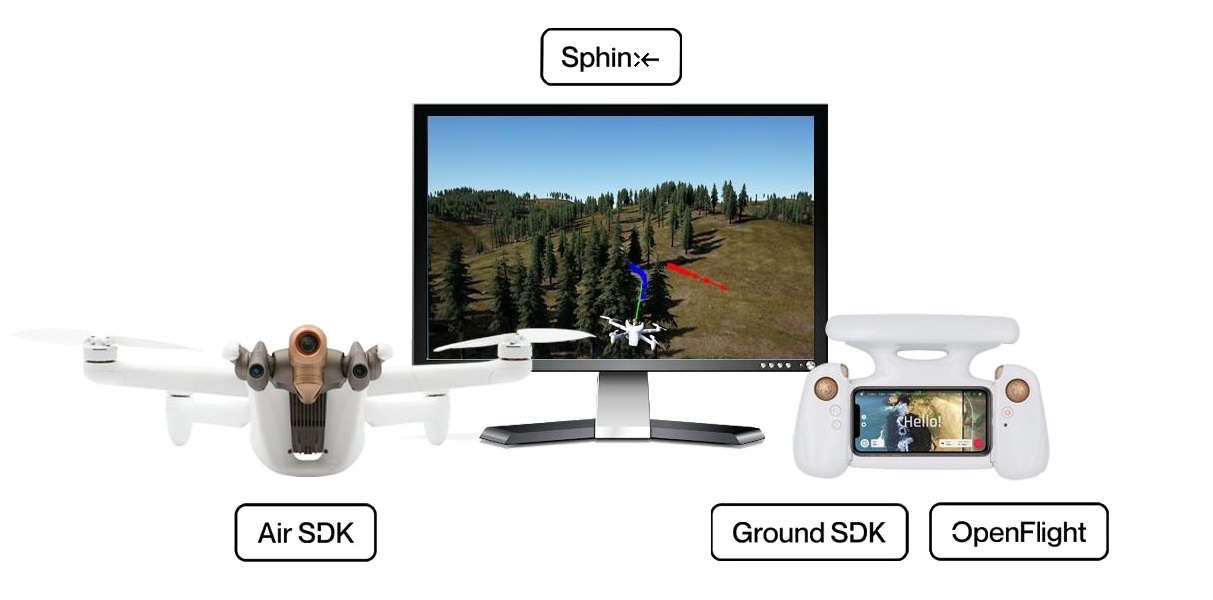
SDK
Le Parrot Software Development Kit est un ensemble d'outils et de logiciels open source pour les développeurs. Depuis la création du premier drone A. R. Drone, le logiciel open source de l'entreprise sous-tend les plates-formes et les outils de développement, et Parrot
Le développeur précise que toutes les ressources SDK de l'entreprise sont disponibles gratuitement, sans inscription et sans suivi, sur le portail " Parrot Portail des développeurs"... Vous pouvez également rejoindre les milliers de développeurs sur le forum Parrot où vous pourrez échanger sur des sujets d'actualité directement avec les ingénieurs de l'entreprise.
Air SDK
Exécutez votre code sur ANAFI Ai
Air SDK fournit une architecture technologique révolutionnaire pour télécharger et exécuter du code directement à ANAFI Ai. Les développeurs peuvent programmer des missions de vol personnalisées avec accès à tous les capteurs de drones, interfaces de connexion et fonctions de pilote automatique.
Air SDK fournit un accès à bord à:
- Tous les capteurs (IMU, GPS, TOF) et modes de vol
- Flux vidéo et métadonnées avec toutes les caméras
- Interfaces de communication Wi-Fi, 4G, USB
- Cartes de profondeur et grilles de remplissage
- Création de trajectoire d'évitement d'obstacles
Tout développeur peut:
- Changer l'état du drone en créant des missions de vol
- Changer le mode de navigation
- Ajouter des processus Linux embarqués (pour par exemple, transférer des données sur un canal 4G ou utiliser la vision par ordinateur)
Le SDK Air prend en charge le langage de programmation C ou Python. Air SDK est livré avec un guide d'installation détaillé et une documentation API. De nombreux exemples d'application illustrent toutes les possibilités offertes par son architecture unique.
Ground SDK
Construire une application mobile puissante
Le Ground SDK est une plate-forme logicielle de station de contrôle au sol (GCS) pour les appareils mobiles (iOS et Android sont pris en charge). Il permet à tout développeur de créer une application mobile pour ANAFI Ai pour un contrôle ultérieur du drone directement depuis un appareil mobile. Toutes les fonctions BVS (contrôle, vidéo, paramètres) sont disponibles via une API facile à utiliser et entièrement documentée.
OpenFlight
Open Source Ground Control Station
Pour la première fois, Parrot ouvre le code source de son application Ground Control Station. OpenFlight est le cœur de notre célèbre application open source FreeFlight 7. Cela permet au développeur de se concentrer sur l'ajout de ses propres fonctionnalités et d'avoir immédiatement une application d'aspect professionnel prête à être publiée sur l'AppStore.

OpenFlight contient:
- Tous UX FreeFlight 7
- Tous les paramètres d'interface
- Code de visualisation 3D temps réel des obstacles
- Code de gestion des communications 4G
- OpenFlight est publié sous licence BSD-3 avec un guide d'installation complet et une documentation complète.
Sphinx
Simulation photoréaliste 3D
Parrot Sphinx est un outil avancé de simulation de drone. Les ingénieurs Parrot l'utilisent pour développer et tester toutes les fonctionnalités d'ANAFI Ai. Le concept général est de simuler le firmware réel du drone avec tous ses capteurs dans un environnement visuellement et physiquement réaliste.

Parrot Sphinx permet:
- Simuler toutes les caméras et capteurs
- Simuler les cartes de profondeur et la segmentation images
- Parcourez de nombreuses scènes 3D réalistes
- Connectez-vous à différents types de télécommandes
- Utilisez des scripts pour contrôler la simulation
- Ajoutez des piétons et des véhicules
- Visualiser et enregistrer les données de vol
- Ajuster les capteurs de l'avion et les éléments physiques environnants
- Contrôler le facteur temps réel
Parrot Sphinx est construit sur la base d'un standard avancé composants:
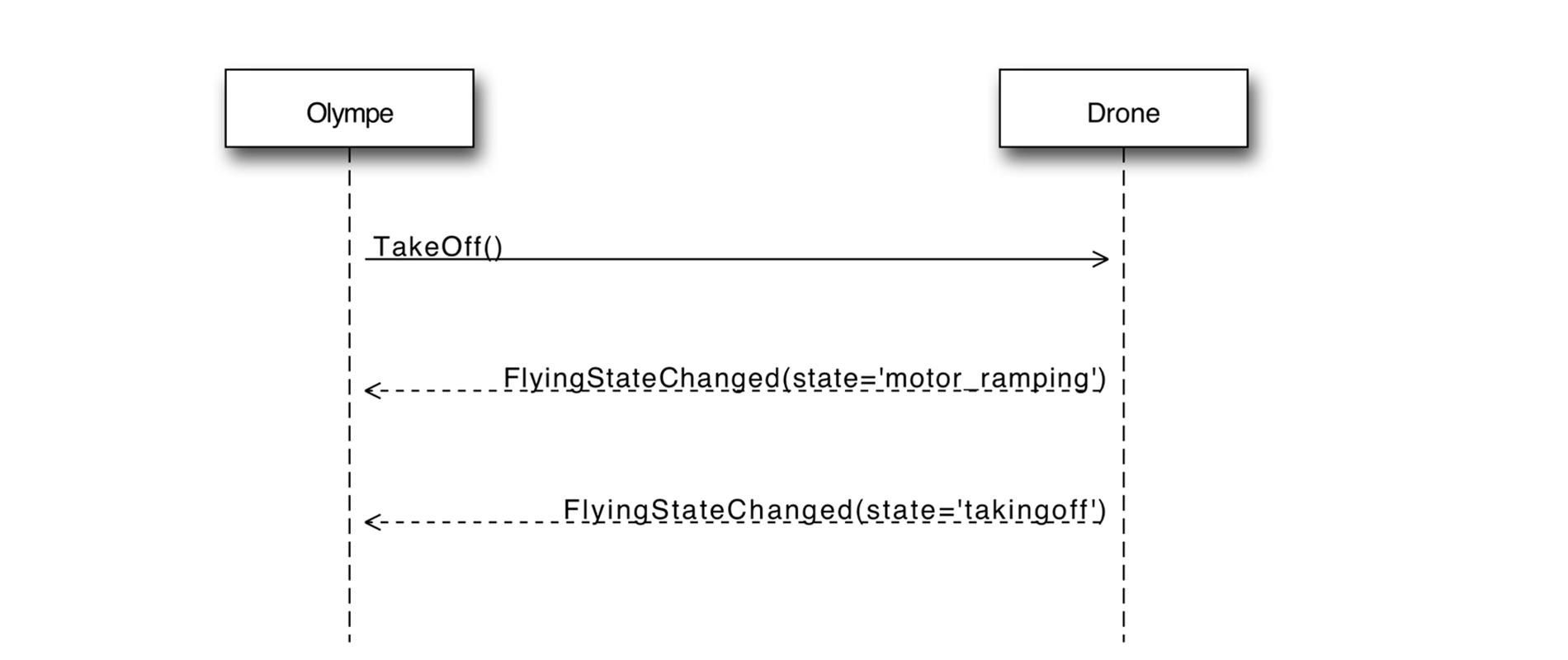
Olympe
Python pour contrôler ANAFI Ai
Olympe fournit une interface de programmation de contrôleur Python pour ANAFI Ai. Le but initial d'Olympe était d'interagir avec l'environnement de modélisation Sphinx. Olympe peut également contrôler un ANAFI Ai physique depuis un ordinateur distant.
Le framework Olympe permet:
- Se connecter à ANAFI Ai simulé ou physique
- Envoyer des messages de commandes (pilotage, orientation caméra, Retour à l'accueil, Flight Plan)
- Démarrer et arrêter le streaming vidéo de toutes les caméras
- Enregistrer le flux vidéo et les métadonnées synchronisées
PdrAW
Advanced Media Player
PDrAW est une visionneuse vidéo avancée pour les médias ANAFI Ai. La visionneuse prend en charge à la fois la vidéo en streaming (RTP / RTSP) et enregistrée (MP4) sur les plates-formes Linux, macOS, Android et iOS. PDrAW se présente sous la forme d'une bibliothèque (libpdraw), d'une bibliothèque wrapper (libpdraw-backend) et d'un exécutable autonome (pdraw).
PDrAW gère également les métadonnées vidéo. Sur ANAFI Ai, le streaming et la vidéo enregistrée incluent des métadonnées accessibles au public et documentées, permettant un traitement avancé de la vidéo aérienne.
Modèles C. A. D.
Parrot fournit des modèles 3D de leurs drones à intégrer dans votre conception CAO pour un prototypage rapide et l'intégration d'accessoires.
Compatibilité MAVLink et GUTMA
ANAFI Ai est compatible avec le protocole open source standard MAVLink v1, qui permet l'échange de données en temps réel entre le drone et la station de contrôle. ANAFI Ai peut être contrôlé manuellement ou en utilisant la planification de vol automatique à partir d'une station de base compatible MAVLink telle que QGroundControl.
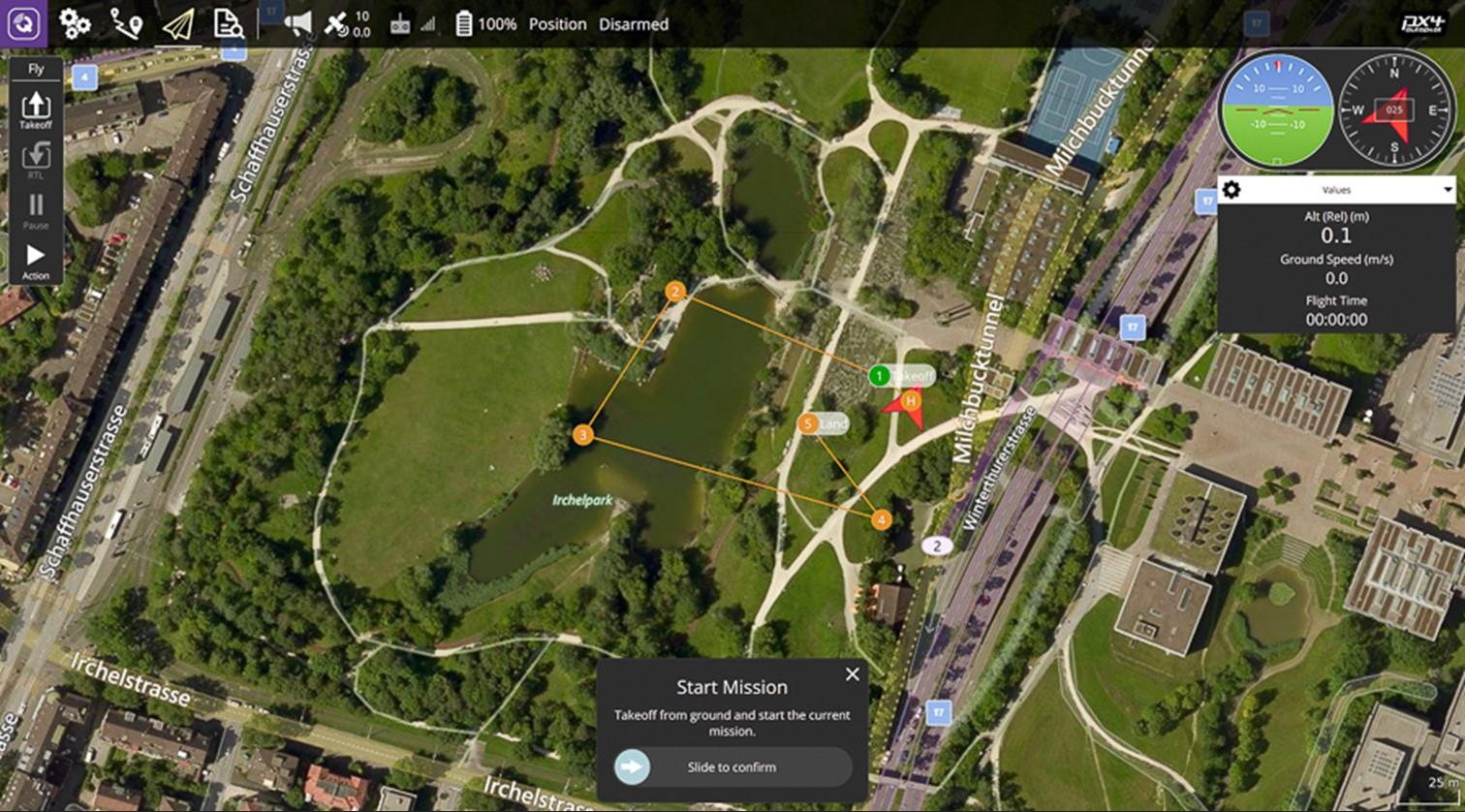
* Interface QGroundControl
ANAFI Ai est compatible avec le protocole de données de vol standard open source GUTMA. La Global UTM Association est un consortium d'acteurs majeurs dans le domaine du contrôle du trafic aérien.

Plus grand écosystème de partenaires pour drones Parrot
Parrot continue d'étendre l'écosystème mondial de fournisseurs de logiciels pour drones via son programme SDK partenaire.offrant des solutions spécialisées et uniques pour les besoins croissants et évolutifs des utilisateurs professionnels.
Parrot pour chaque besoin métier
Pour tirer le meilleur parti du processus d'inspection, Parrot propose à ses clients un écosystème de logiciels de drones compatibles allant de la gestion de flotte à la compilation de vol planifier et importer les journaux de vol, avant de prendre des photos, de cartographier, de surveiller et d'analyser les données reçues.
PIX4D × Parrot
Applications de modélisation 2D/3D. Un ensemble unique d'applications de photogrammétrie mobiles, de bureau et cloud.
Verizon x Skyward x Parrot
Solution de drone 4G LTE aux États-Unis. Le premier drone robotique du genre ANAFI Ai connecté au réseau Verizon 4G LTE avec le logiciel Skyward préinstallé. Ouvre la porte aux transferts de données en temps quasi réel, aux déploiements à distance et aux vols hors champ de vision.

Skyward × Parrot
Intégration et apprentissage au sein de la capacité ANAFI. Plate-forme de gestion de l'aviation comprenant l'espace aérien, l'accès au LAANC et la formation, l'équipement et la connectivité pour le déploiement de flotte de drones d'entreprise.

DroneSense × Parrot
Créez, gérez et faites évoluer vos programmes de drones. Les professionnels des véhicules aériens sans pilote du secteur de la sécurité publique peuvent utiliser la suite complète des capacités de DroneSense, spécialement conçues pour les besoins des premiers intervenants.

Parrot Ecosystem Partners

Parrot Affiliate Program
Le développeur propose d'étendre les capacités de son programme pour drones en intégrant leur SDK.
Cybersécurité
Confidentialité des données
Le développeur note qu'il ne collecte pas toutes les données sans le consentement des utilisateurs. La décision de transférer ou non des données vers l'infrastructure Parrot appartient uniquement aux utilisateurs eux-mêmes. Les données hébergées dans Parrot permettent à l'utilisateur de synchroniser les données de vol et les plans de vol entre différents appareils, ainsi que de faciliter le support et permettre à Parrot d'améliorer ses produits.
ANAFI Ai est conforme au Règlement général sur la protection des données de l'Union européenne (RGPD) et va plus loin, par exemple, vous permet de supprimer toutes les données en 1 clic, offrant ainsi aux utilisateurs le contrôle le plus simple. Ce problème en un clic est résolu dans l'application mobile FreeFlight7 ou dans les paramètres de confidentialité du compte Parrot. Cloud. Ainsi, les utilisateurs peuvent à tout moment non seulement arrêter d'échanger des données, mais également demander facilement leur suppression.
Si l'utilisateur consent à l'échange de données, leur traitement sera effectué dans un format totalement transparent, décrit en détail dans la Politique de confidentialité de Parrot.
Lorsque ANAFI Ai est connecté au Skycontroller 4 via la 4G, l'infrastructure Parrot est utilisée pour coupler le drone et la télécommande. Si l'utilisateur n'est pas connecté à un compte Parrot. Cloud, il peut toujours utiliser une connexion 4G avec un compte temporaire unique. Lors de l'utilisation de l'infrastructure Parrot pour l'appairage 4G, la vidéo est cryptée à l'aide d'une clé convenue entre le drone et la télécommande, Parrot n'a pas accès à la vidéo en clair.

Conforme FIPS140-2 et CC EAL5 Secure Element
ANAFI Ai dispose d'un élément de sécurité Wisekey intégré conforme NIST Certifié FIPS140-2 Niveau 3 et Critères Communs EAL5. Un élément de sécurité similaire est également intégré au matériel de contrôle du Skycontroller 4.
Fonctions de l'élément de sécurité:
- Effectue des opérations cryptographiques
- Stocke et protège les informations confidentielles
Il utilise une clé ECDSA personnelle avec des paramètres de domaine P521, qui est unique pour chaque drone. Il ne peut pas être extrait de l'élément de sécurité. Et le certificat associé à cette clé est signé par une autorité de certification.
Wisekey protège l'intégrité du micrologiciel, fournit une identification de drone unique pour le couplage 4G et une authentification forte, ainsi qu'une signature numérique unique des photos prises par le drone.

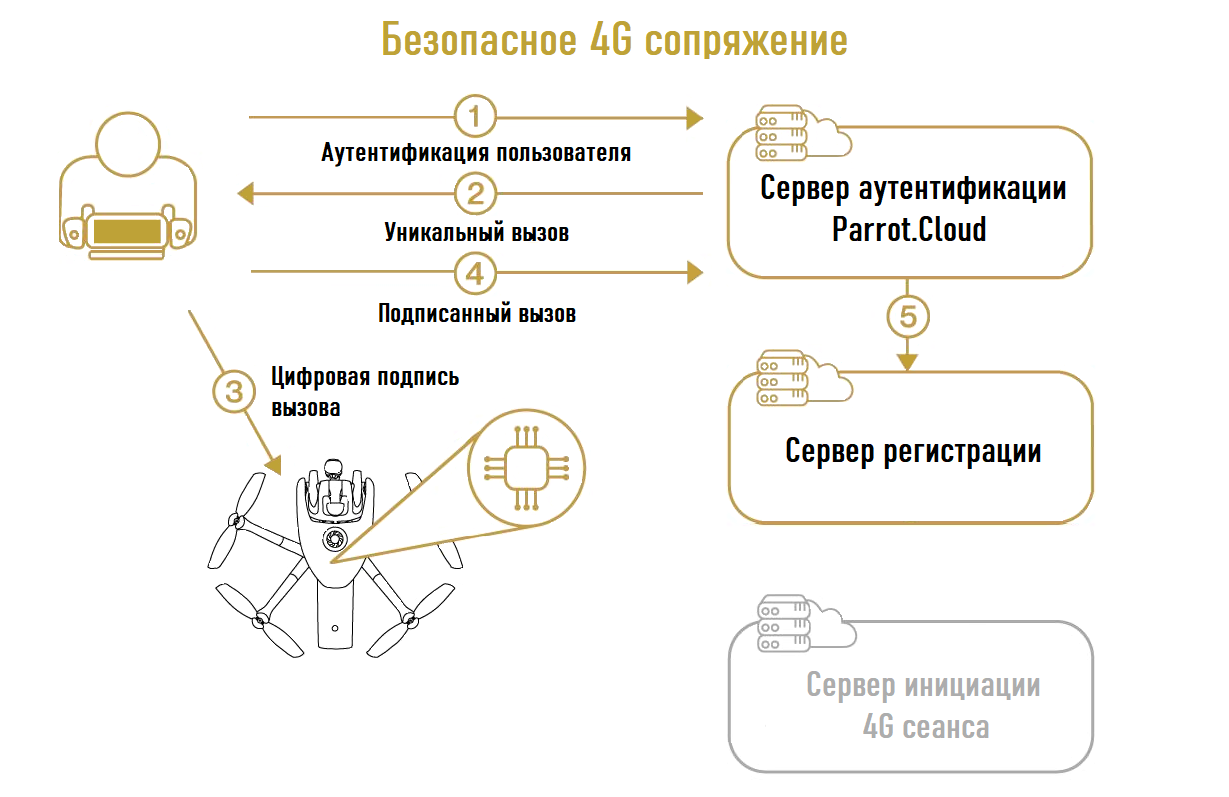
Connexion sécurisée 4G et authentification forte
le processus d'appairage sécurisé des appareils. Au cours de ce processus, l'utilisateur confirme de manière fiable qu'il est connecté à un drone spécifique. Grâce à ANAFI Ai Secure Element, il peut le faire sans saisir de mot de passe à l'intérieur du drone.
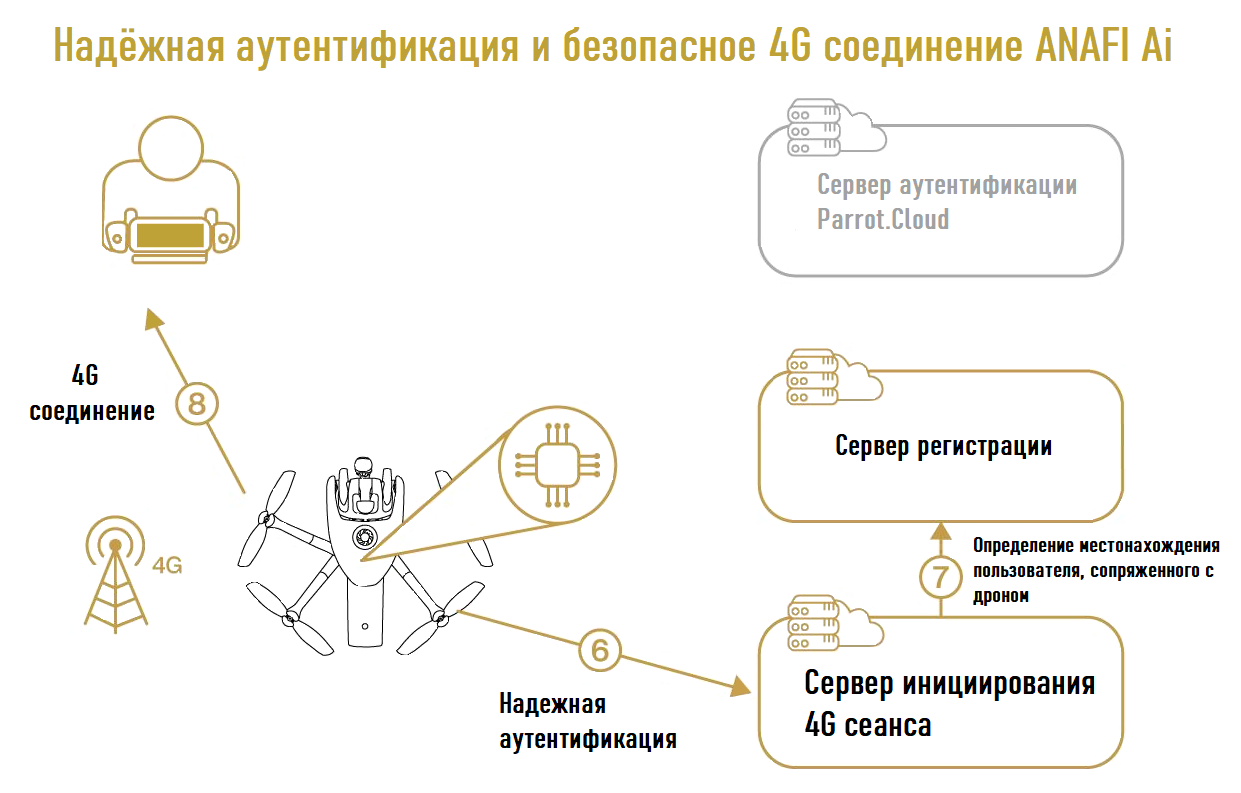
Les serveurs Parrot enregistrent alors la communication entre l'utilisateur et le drone. Lorsque la connexion Wi-Fi entre l'utilisateur et le drone est perdue, ANAFI Ai passera automatiquement en connexion 4G. ANAFI Ai procède à une authentification forte sur les serveurs Parrot à l'aide de sa clé privée stockée sur le Secure Element. Les serveurs Parrot recherchent les utilisateurs connectés et assurent l'interface entre ANAFI Ai et Skycontroller 4.
Pour protéger le contrôle des drones et les flux vidéo arrivant sur Skycontroller 4, ANAFI Ai prend en charge les protocoles TLS, DTLS et SRTP.
Initialisation et mise à jour sécurisées
La séquence de démarrage de l'avion est protégée: le système vérifie qu'il utilise le logiciel Parrot et que ce logiciel n'a pas été falsifié. Un contrôle de sécurité est effectué à chaque initialisation. Le service de mise à jour contrôle également la signature numérique des mises à jour logicielles.
Configuration des clés utilisateurs sur l'élément sécurisé
Les utilisateurs d'ANAFI Ai ont accès à un compte opérateur spécial élément sécurisé. Ce compte est utilisé pour configurer des clés pertinentes pour cet utilisateur. Les utilisateurs peuvent configurer l'élément sécurisé avec les clés publiques des prestataires de mission en qui ils ont confiance. ANAFI Ai n'effectuera que les missions signées avec ces clés. Ce processus empêche les attaquants d'effectuer des missions de vol malveillantes sur le drone.
Photos signées numériquement
L'élément sécurisé d'ANAFI Ai peut signer numériquement des images de drones. Cette signature est la preuve que:
- Ladite image signée a été prise par le véhicule aérien sans pilote indiqué.
- Ni l'image elle-même ni ses métadonnées n'ont été traitées (volontairement ou non) - les métadonnées, également appelées EXIF et XMP, contiennent des informations sur la date, l'heure et l'emplacement de l'image.

Autrement dit, la signature numérique protège toutes les données liées à l'image, y compris le lieu et l'heure où elle a été prise, et quel drone ANAFI Ai.
Les utilisateurs ainsi que les partenaires proposant des solutions logicielles utilisant la photographie par drone peuvent vérifier la signature numérique des photos ANAFI Ai soit avec le certificat du drone, soit via le catalogue à clé publique fourni par Parrot.
Transparence et contrôles de sécurité continus avec Bug bounty
Parrot utilise des protocoles et des formats de fichiers standard dans la mesure du possible. Il n'y a pas de code obscurci ou de fonctionnalités cachées. Cela permet à l'utilisateur de comprendre le fonctionnement des produits Parrot et de tester leur sécurité. De plus, OpenFlight, le logiciel utilisé pour contrôler le drone, est open source, donnant aux utilisateurs un contrôle total.
En avril 2021, Parrot a lancé le programme Bug Bounty avec YesWeHack, la première plateforme de sécurité crowdsourcing d'Europe. Grâce à ce partenariat, Parrot s'appuie sur la vaste communauté de recherche en cybersécurité de YesWeHack pour identifier les vulnérabilités potentielles de ses drones, applications mobiles et services Web.
Le programme Bug Bounty se compose de deux phases:
Les programmes privés fournissent initialement un accès exclusif à certains chercheurs en sécurité et incluent les futurs modèles de drones Parrot. L'expérience et les compétences diverses des chercheurs confirmeront le haut niveau de sécurité des produits avant leur mise sur le marché, ce qui contribuera à améliorer la sécurité des utilisateurs de Parrot et la protection de leurs données.
Après ce premier tour du programme privé Bug Bounty et après commercialisation, les produits entrent dans le programme public. Leur sécurité est ensuite rigoureusement contrôlée par l'ensemble de la communauté YesWeHack de plus de 22 000 chercheurs en cybersécurité.

Gestion des données
Parrot Cloud permet aux utilisateurs qui choisissent de partager leurs données de gérer les données de vol et de flotte, ainsi que le multimédia données reçues par leurs drones.
Données collectées
Parrot Cloud collecte 4 types de données:
Statique (données produit):
- Avion numéro de série
- Numéro de série de la batterie
- Version du micrologiciel de l'avion et de la batterie
- Version du matériel de l'avion et de la batterie
- Modèle de l'appareil
- FreeFlight 7 Release Version
Événements
- Alertes: Batterie, Pilote automatique, Capteurs
- Communication: connecter/déconnecter, démarrer la diffusion, alerte d'interférence, signal faible
- Caméra: statistiques de diffusion, changements de paramètres
- Vol: changement d'état (décollage, atterrissage, vol stationnaire, etc.), activation d'une tâche de vol (plan de vol, photogrammétrie)
"Images contextuelles"
- Timelapse - snapshot et (une fois toutes les 2 minutes)
- Deep Learning (cartographier plus d'objets, de paysages pour améliorer l'autonomie de vol, le suivi, l'évitement d'obstacles)
- Stéréovision (carte de profondeur)
- Images déclenchées par événement
- Début et fin des déclarations précises de survol, atterrissage précis
- Crash de drone
- Les visages sont automatiquement flous pendant la transmission
Télémétrie
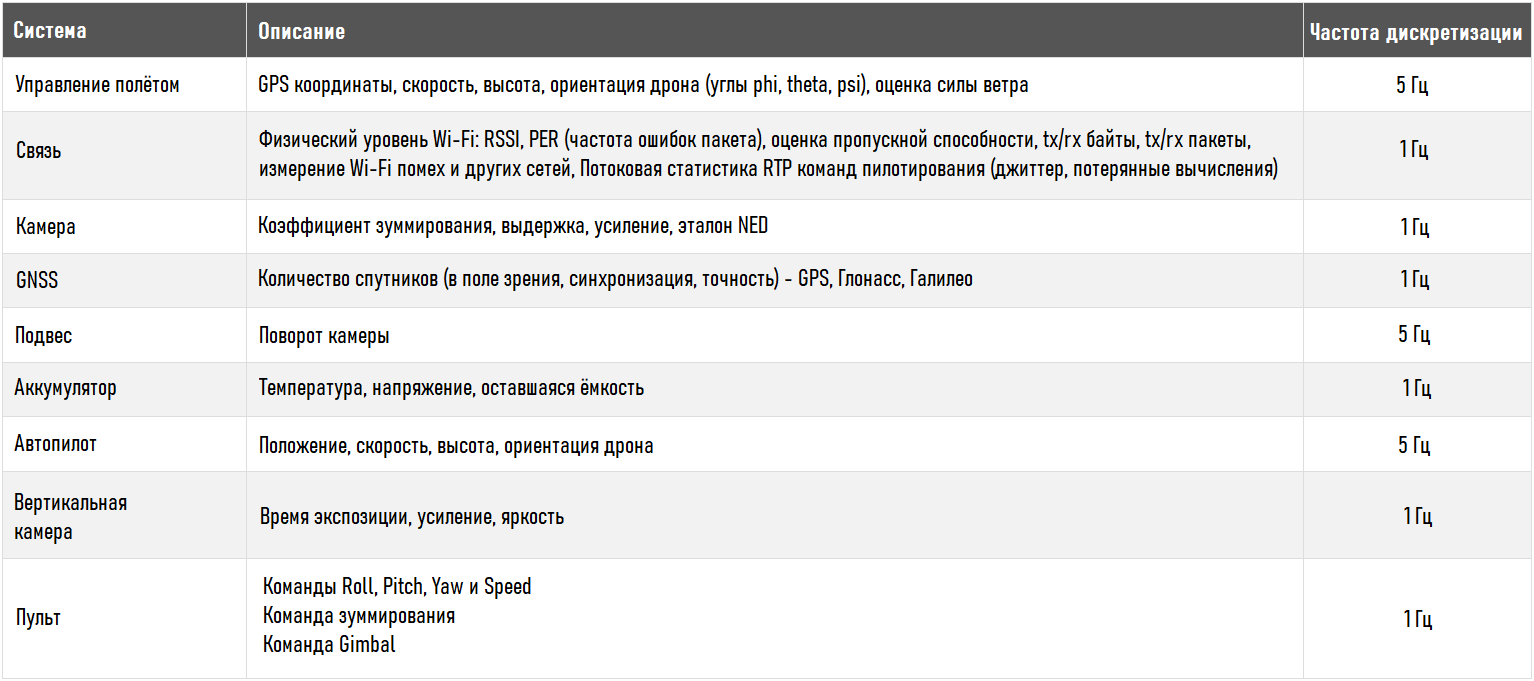
Utilisation finale des données collectées
Parrot ne collecte et n'utilise que les données des clients ayant accepté de les partager afin d'améliorer la qualité de ses produits...
Gestion de la maintenance
Maintenance préventive: Nos outils collectent toutes les informations liées aux missions (type de mission, heures de décollage et d'atterrissage, nombre de missions, localisation du drone, vitesse de vol, plan de vol et paramètres AirSDK). Cela vous permet de recevoir des informations précises sur l'état de la flotte de drones ANAFI Ai (ainsi que leurs contrôleurs et batteries) en temps réel.
Maintenance corrective: Les informations collectées sont utiles pour déterminer rapidement l'état d'un drone ou d'une batterie en particulier.
Enhancing Artificial Intelligence (IA)
Les éléments d'IA d'ANAFI Ai (PeleeNet, réseaux convolutifs, etc.) offrent aux utilisateurs des services et des fonctionnalités inégalés: évitement d'obstacles, suivi de cible, plusieurs modes de vol. La qualité de l'IA dépend de la quantité et de la qualité des données collectées (images et vidéos): ces données alimentent le machine learning. A cet égard, la qualité des données n'est pas le seul élément décisif: les métadonnées associées à ces données sont également fondamentales. Pour cette raison, notre outil collecte régulièrement et en fonction des événements des images et des métadonnées, pour un total de 30 à 50 Mo par minute.
Caractéristiques de vol
Caractéristiques aérodynamiques
Entraînements et aérodynamique
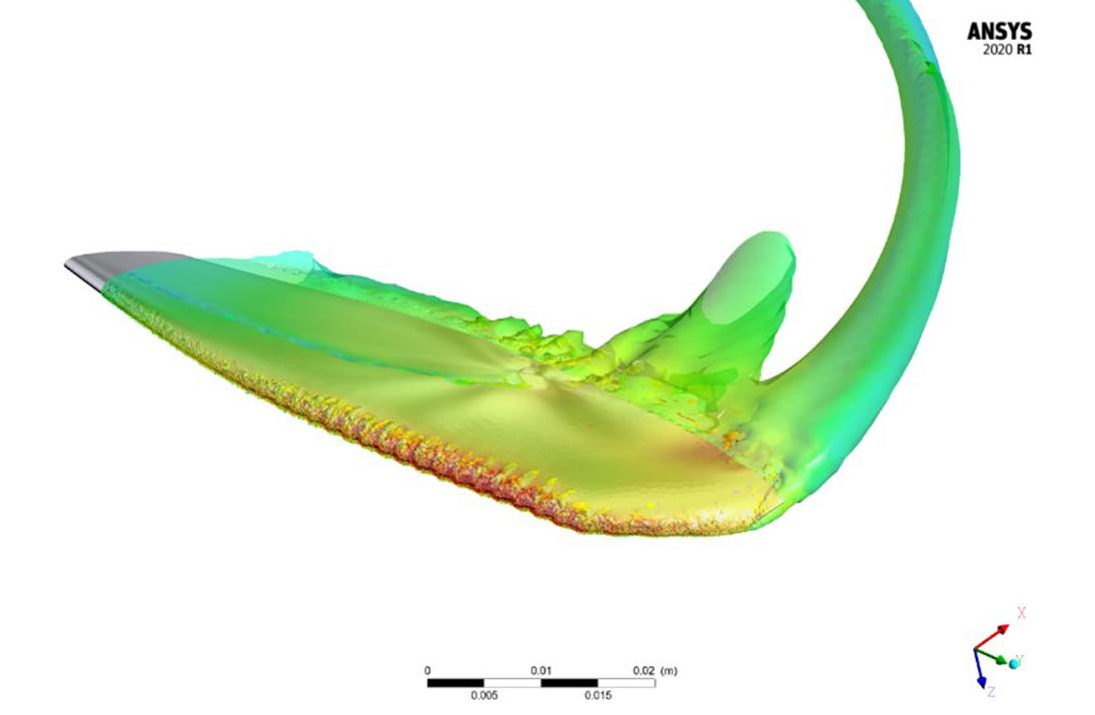 Image CFD de pales d'hélice ANAFI Ai
Image CFD de pales d'hélice ANAFI Ai
Nouvelles pales d'hélice biomimétrée avec un bord d'attaque en forme de baleine à bosse. Cette approche a permis d'augmenter l'efficacité propulsive de la centrale, qui à la sortie a fourni une augmentation de la poussée à la même vitesse de rotation. Cet effet est comparable à une augmentation du diamètre du rotor.
Le bruit acoustique, en particulier le bruit tonal, émanant du bord d'attaque est également réduit. Ainsi ANAFI Ai est plus silencieux [71,5 dB SPL (A) à 1 m] que Skydio 2 [76,4 dB SPL (A) à 1 m].
- Temps de vol supérieur à 32 minutes
- Grâce aux caractéristiques aérodynamiques optimisées du fuselage et au système de propulsion ANAFI Ai, la vitesse maximale en vol vers l'avant est de 61 km/h, avec vol latéral et vol retour 58 km/h
- Max. résistance au vent 12,7 m/s.
- Grâce au rendement de couple élevé du moteur/hélice et à la grande autonomie de la batterie, l'autonomie est de 22,5 km (à une vitesse constante de 50 km/h par temps calme).
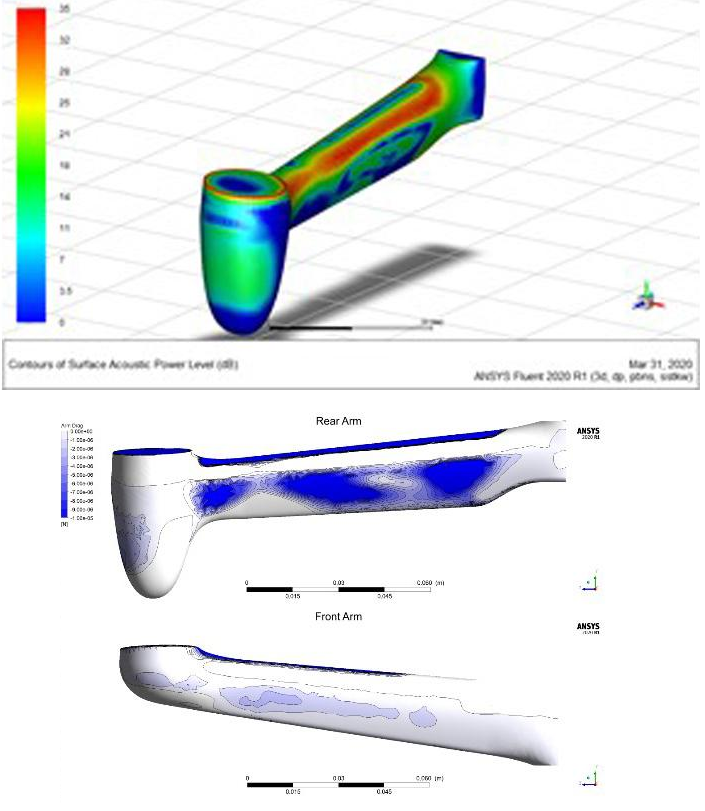 Images CFD des faisceaux ANAFI Ai
Images CFD des faisceaux ANAFI Ai
Capteurs
Pour assurer un vol en toute sécurité ANAFI Ai est équipé de:
- 2 × IMU (ICM-40609-D et ICM42605)
- Magnétomètre LIS2MDL
- Module GPS UBX-M8030
- TI OPT3101 temps de vol (ToF)
- Baromètre LPS22HB
- Caméra verticale
Caractéristiques du capteur
)IMU de vol: ICM-40609-D
- Gyroscope 3 axes
- Plage: ± 2000 °/s
- Résolution: 16,4 LSB/° /s
- Offset / Précision: ± 0,05 °/s (après calibration thermique et dynamique)
- Accéléromètre 3 axes
- Plage: ± 16g
- Résolution: 2,048 LSB / mg
- Offset / précision: ± 0,5 mg (XY) ± 1 mg (Z) (après étalonnage thermique et dynamique)
- Contrôle de la température s: système de chauffage contrôlé par rapport à la température ambiante, stabilisé à: ± 0,15 °C
- Fréquence de mesure: 2 kHz
Magnétomètre: LIS2MDL
- Plage: ± 49,152G
- Résolution: 1,5 mG
- Offset / Précision: ± 15 mG (après compensation, à vitesse maximale du moteur)
- Fréquence de mesure: 100 Hz
Baromètre: LPS22HB 1
- Plage: 260 à 1260 hPa
- Résolution: 0,0002 hPa
- Offset / précision: ± 0,1 hPa
- Régulation de température: système de chauffage régulé par rapport à la température ambiante, stabilisé à: ± 0,2 °C
- Fréquence de mesure: 75 Hz
- Bruit de mesure: 20 cm RMS
GNSS: UBX-M8030 1
- Antenne patch en céramique 25 × 25 × 4 millimètres, permettant une amélioration du gain de 2 dB par rapport à ANAFI 1
- Sensibilité: démarrage à froid -148 dBm / tracking et navigation: -167 dBm
- Time-To-First-Fix: 40 secondes
- ) Précision / Précision: Position (écart type 1,4 m), Vitesse (écart type 0,5 m/s)
Caméra verticale
- Capteur d'image format: 1/6 pouce
- Résolution: 640 × 480 pixels
- Capteur d'image avec obturateur global
- Noir et blanc
- FOV: Angle de vue horizontal: 53,7° / angle de vue vertical: 41,5°
- Distance focale: 2,8 mm
- Mesure de la vitesse du flux optique au sol à 60 Hz
- 15Hz & ajustement de précision @ 5Hz
ToF: TI OPT3101
- Portée: 0-15m
- Résolution: 0,3 mm
- ) Précision b: ± 2 cm (après calibrage)
- Fréquence de mesure: 64 Hz
Caméra verticale IMU: ICM-42605
- Gyroscope 3 axes
- Plage: ± 2000°/s
- Résolution: 16,4 LSB/°/s
- Offset/précision: ± 0,1°/s (après dynamique Étalonnage)
- Accéléromètre 3 axes
- Plage: ± 16g
- Résolution: 2,048 LSB / mg
- Offset / Précision: ± 2,0 mg (XY) ± 5,0 mg (Z) - après étalonnage dynamique
- Fréquence de mesure: 1 kHz
- Synchronisation matérielle avec caméra verticale, précision: 1 s
Pilote automatique
Le contrôleur de vol ANAFI Ai offre un pilotage simple et intuitif: aucune formation n'est requise pour son utilisation. Il permet d'automatiser de nombreux modes de vol (Plan de vol, Caméraman, Décollage manuel, Smart RTH). Les algorithmes de fusion de capteurs combinent les données de tous les capteurs pour estimer le rapport ANAFI Ai, l'altitude, la position et la vitesse.
L'évaluation de l'état est essentielle au bon fonctionnement des drones. Les quadricoptères sont intrinsèquement instables lorsque le contrôleur de vol est utilisé avec une boucle ouverte; pour les contrôler facilement, sans parler du contrôle autonome, il est nécessaire de les stabiliser à l'aide d'algorithmes de contrôle en boucle fermée. Ces algorithmes calculent et envoient les commandes aux moteurs nécessaires à ANAFI Ai pour atteindre les trajectoires souhaitées.

Vol indoor
En l'absence de signal GPS, ANAFI Ai s'appuie principalement sur les mesures verticales des caméras pour estimer la vitesse et la position. Les performances de la caméra verticale sont déterminées par deux algorithmes principaux:
- Flux optique pour l'estimation de la vitesse
- Détection et correspondance des points clés pour l'estimation de la position
Caméra verticale les algorithmes peuvent fonctionner dans des conditions de faible luminosité grâce à l'ANAFI Ai équipé d'une paire de lumières LED situées à côté de la caméra verticale. Ils permettent au drone de rester stable, notamment en vol en intérieur ou en l'absence de GPS, à une altitude inférieure à 5m au-dessus du sol. La puissance des lumières LED s'adapte automatiquement, en fonction des besoins de l'algorithme.
Vol autonome
Principales caractéristiques
- Système de détection rotatif à large champ de vision
- ) Extraction de la profondeur de l'espace environnant basée sur l'alignement stéréo et la profondeur par mouvement
- Représentation de l'environnement sous forme de grille de remplissage
- Détection et évitement autonome d'obstacles à vitesses jusqu'à 29 km/h
Ce chapitre détaille les capteurs, le matériel et les algorithmes utilisés par ANAFI Ai pour permettre le vol autonome. Il est organisé comme suit:
- Une description détaillée du système de perception ANAFI Ai
- Algorithmes perceptifs utilisés pour reconstruire l'environnement 3D entourant les drones
- Reprogrammation et obstacle évitement

Stratégie du système de perception
La perception de l'environnement tridimensionnel est une capacité clé pour réaliser un vol autonome, en particulier dans les espaces confinés. C'est une condition préalable à la détection et à l'évitement garantis des obstacles, ce qui réduit la charge de l'opérateur du drone, augmente le succès de la mission et assure la sécurité de l'avion.
Libérer le plein potentiel d'une caméra volante, qui peut se déplacer librement et tourner dans toutes les directions sans restriction, nécessite une solution de détection efficace. En particulier, le système de détection devrait être capable de recevoir des informations sur l'environnement dans des directions qui correspondent au mouvement vers l'avant en vol - quelle que soit l'orientation de la caméra.
ANAFI Ai s'appuie sur une solution technique unique basée sur deux cardans mécaniques pour séparer l'orientation de la caméra principale et le système de détection:
- La caméra principale est montée sur un 3- axe cardan, ce qui en fait une orientation 3D indépendante de l'orientation du drone.
- Le système de détection est monté sur un cardan à axe unique - connecté au mouvement de lacet du drone, il peut être orienté dans n'importe quelle direction.
 ANAFI Ai double stabilisateur pour la perception et la visualisation.
ANAFI Ai double stabilisateur pour la perception et la visualisation.
Les axes d'inclinaison des deux cintres sont colinéaires et combinés pour obtenir une conception ultra-compacte.
Grâce à cette solution, il est possible d'orienter la caméra principale et le système de détection dans deux directions différentes. Cette conception évite l'utilisation de caméras coûteuses sur les côtés, en haut, en bas et à l'arrière du drone tout en offrant un large champ de vision disponible pour le système de détection.
Cette section est organisée comme suit:
- Détails des capteurs utilisés pour le système de détection
- Spécifications pour le cardan de la caméra principale et le cardan du système de détection
- Stratégies de ciblage du système de détection pour exploiter le potentiel de la structure à double suspension
Capteurs
Le système de détection est basé sur une paire de caméras identiques avec un axe de tangage...
 Charnière mécanique 1 axe pour système de détection ANAFI Ai.
Charnière mécanique 1 axe pour système de détection ANAFI Ai.
Les spécifications du capteur sont les suivantes:
- Modèle: Onsemi AR0144CSSM28SUD20
- Couleur: Monochrome
- Résolution: 1280 × 800 pixels
- Fréquence d'images: 30 ips
- Obturateur global
- Champ de vision horizontal complet: 118 ° (110 ° utilisable pour la détection)
- Champ de vision vertical complet: 72 ° (62 ° utilisable pour la détection)
- Distance focale: 1,47 mm (0,039 pouces - 492,94610 pixels)
- Ouverture: f / 2,7
les paires stéréo sont les suivantes:
- Axe de pas commun
- Ligne de base/distance: 62 mm (2,44 pouces)
- Capture synchrone à 30 ips

Dual Gimbal
Le cardan mécanique de la caméra principale est un tangage mécanique à 3 axes l-lacet" avec les caractéristiques suivantes:
- Limiteurs de tangage: -116° / 176°
- Limiteurs de roulis: / - 36°
- Limiteurs de lacet: / - 48°
La suspension mécanique du système de détection est une suspension à axe unique avec les caractéristiques suivantes:
- Fins de course en pas: -107° / 204°
- Temps de trajet d'une butée à l'autre: 300 ms
Le système de détection a une course de 311 ° (dont 296 ° n'est pas masqué par le corps du drone), ce qui permet de reculer la perception.
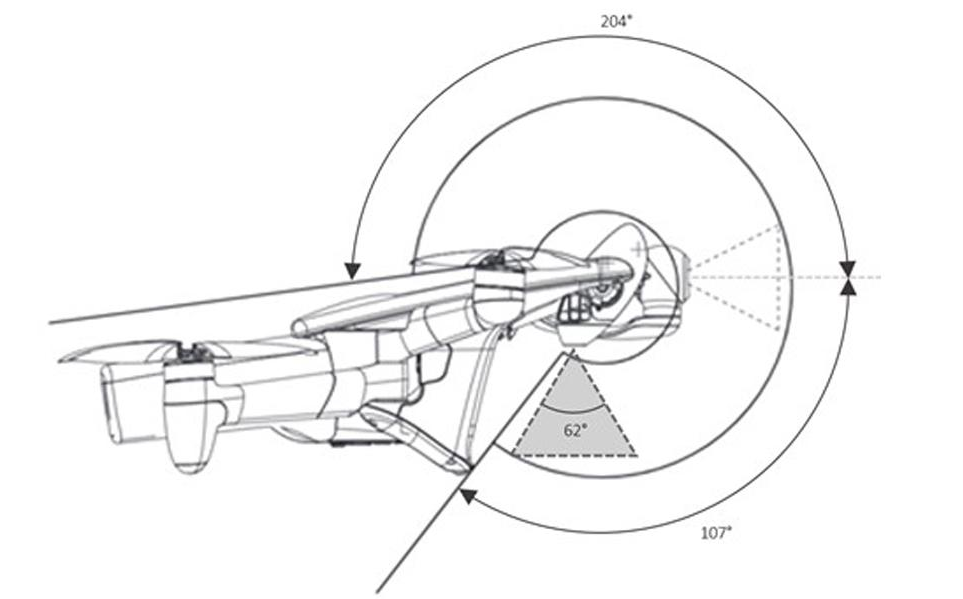
Champ visuel vertical instantané et systèmes limitatifs de perception ANAFI Ai.
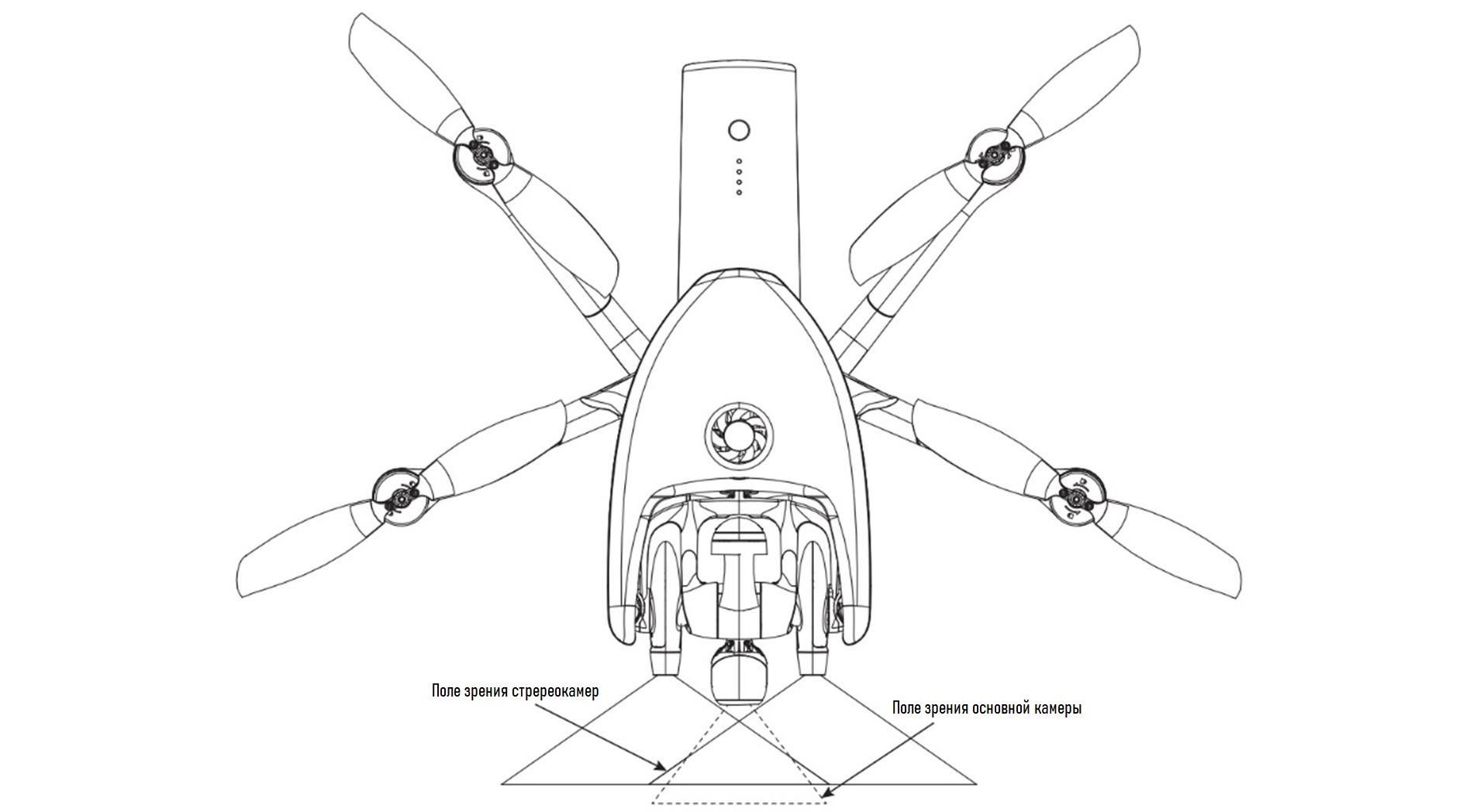
Le système a été conçu de telle manière que:
- Les pales de l'hélice n'entrent pas dans le champ de vision de la caméra principale
- La principale la caméra ne couvre pas le champ de vision du système de perception
- La caméra principale et le système de détection peuvent être entièrement repliés pour protéger les lentilles
 Le champ de vision horizontal du système de perception ANAFI Ai.
Le champ de vision horizontal du système de perception ANAFI Ai.
En se penchant en arrière, le système de perception se déplace vers la position la plus haute, offrant ainsi une vision claire.
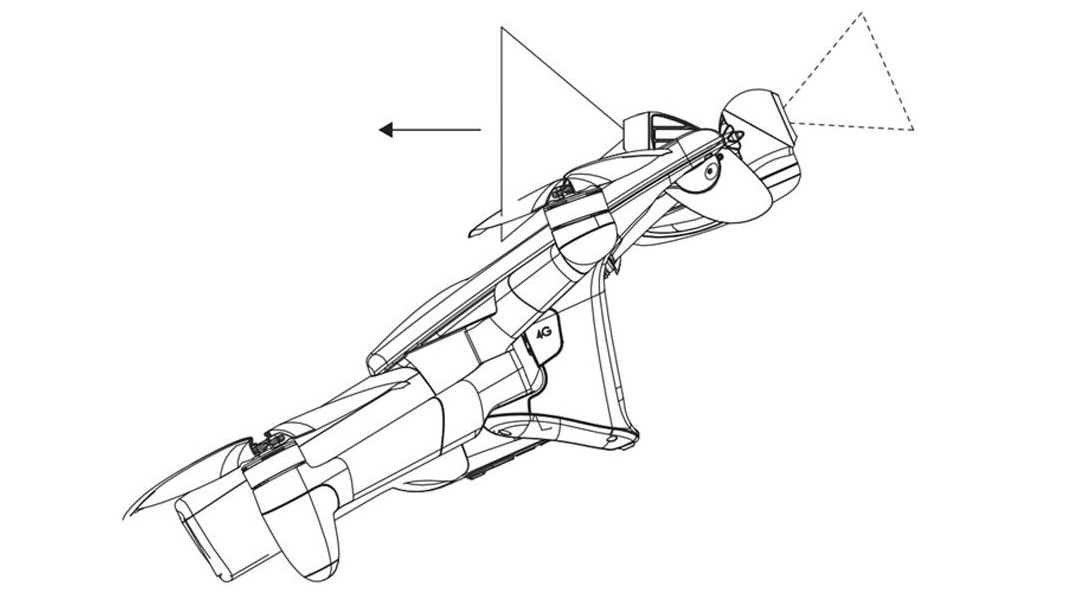
Perception de l'ANAFI Ai en position complètement inclinée pour le vol arrière.
Reconstruction de l'environnement
La reconstruction de l'environnement tridimensionnel environnant pour le vol autonome s'effectue en deux étapes:
- Extraire les informations de profondeur de la perception sous forme de cartes de profondeur
- Combiner les données de la carte de profondeur dans une grille de remplissage tridimensionnelle
Deux méthodes sont utilisées pour obtenir des cartes de profondeur à partir de capteurs de perception:
- Profondeur basée sur l'alignement stéréo
- Profondeur à partir du mouvement
Profondeur à partir de la correspondance stéréo
La principale méthode d'extraction de la profondeur l'information est basée sur la parallaxe entre deux caméras stéréo du système de perception. En photographiant l'environnement dans une direction, mais à partir de deux positions différentes, les objets dans le champ de vision du système de perception apparaissent dans des positions différentes dans les images obtenues par deux caméras. Plus le sujet est proche, plus la différence de position est grande.
Ainsi, la stratégie consiste à déterminer les points dans les images obtenues par les caméras stéréo gauche et droite correspondant au même objet dans le champ de vision du système de détection, et à mesurer la différence de position de ces points dans les deux images. Cette différence est appelée disparité et se mesure en nombre de pixels.
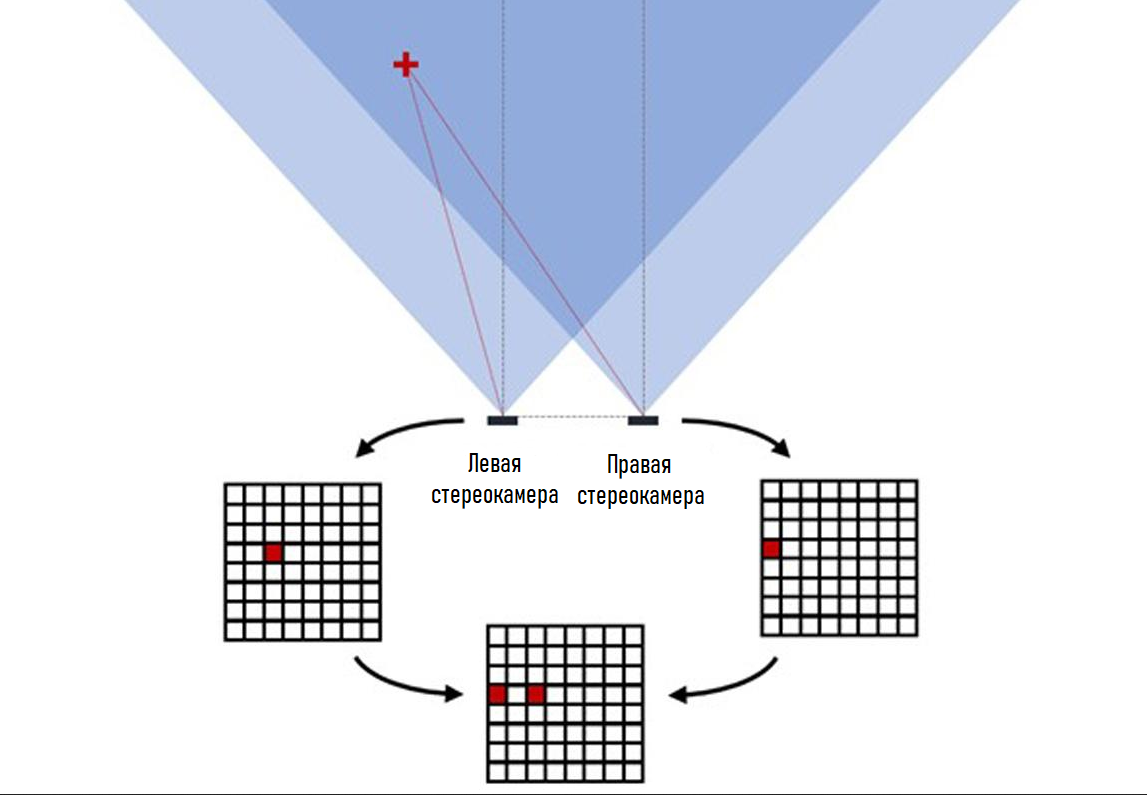 Illustration du principe de la vision stéréo - le point 3D rouge est dans des positions différentes sur les images gauche et droite.
Illustration du principe de la vision stéréo - le point 3D rouge est dans des positions différentes sur les images gauche et droite.
La disparité peut alors être liée à la profondeur de chacun de ces points en utilisant la relation suivante profondeur = focale * ligne de base / disparité, où la profondeur et la ligne de base sont exprimées dans les mêmes unités, et la focale la longueur et la disparité sont exprimées en nombre de pixels.
Le résultat du calcul prend la forme d'une carte de profondeur de 176 × 90 pixels, pour laquelle la valeur de chaque pixel correspond à la profondeur en mètres. La carte de profondeur est rafraîchie à 30 Hz.
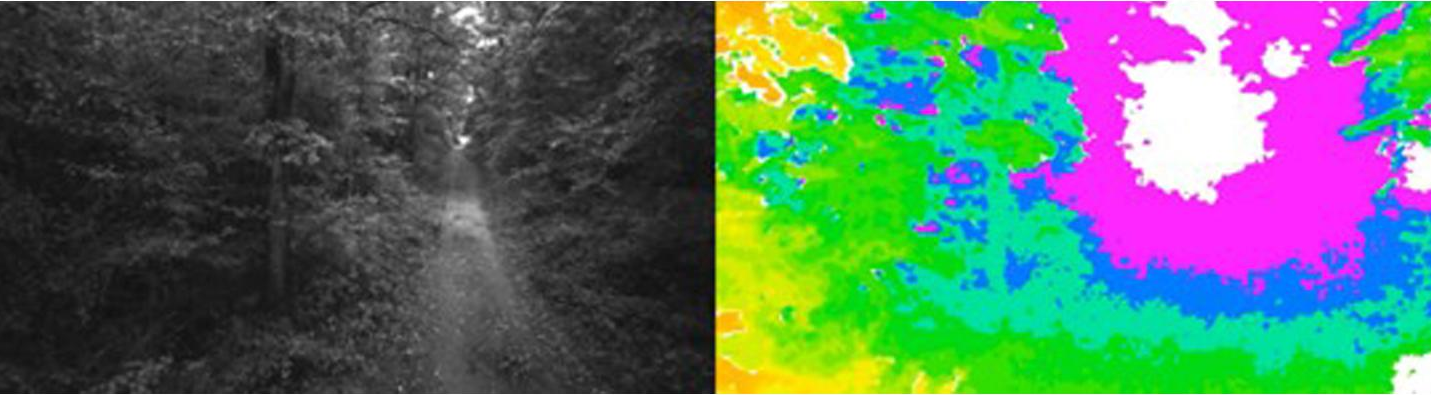
Un exemple d'image capturée par la caméra droite du système de détection ANAFI Ai (à gauche) et la profondeur correspondante obtenue en utilisant l'imagerie stéréo (à droite). La carte des couleurs va du rouge (Plus proche) au violet (Plus loin) - le blanc signifie Hors de portée.
Le résultat immédiat de ceci est que la profondeur mesurée par cette méthode est discrétisée, puisque la disparité ne peut prendre que des valeurs discrètes (nombre de pixels). Un point 3D situé suffisamment loin du système de perception et créant une disparité théorique inférieure à un pixel sera considéré comme infini, puisque la disparité discrète réelle correspondante sera égale à 0. La précision de la méthode de comparaison stéréo diminue avec l'augmentation de la distance, bien qu'il sont des méthodes qui peuvent réduire ce phénomène en réalisant un échantillonnage sous-pixel.
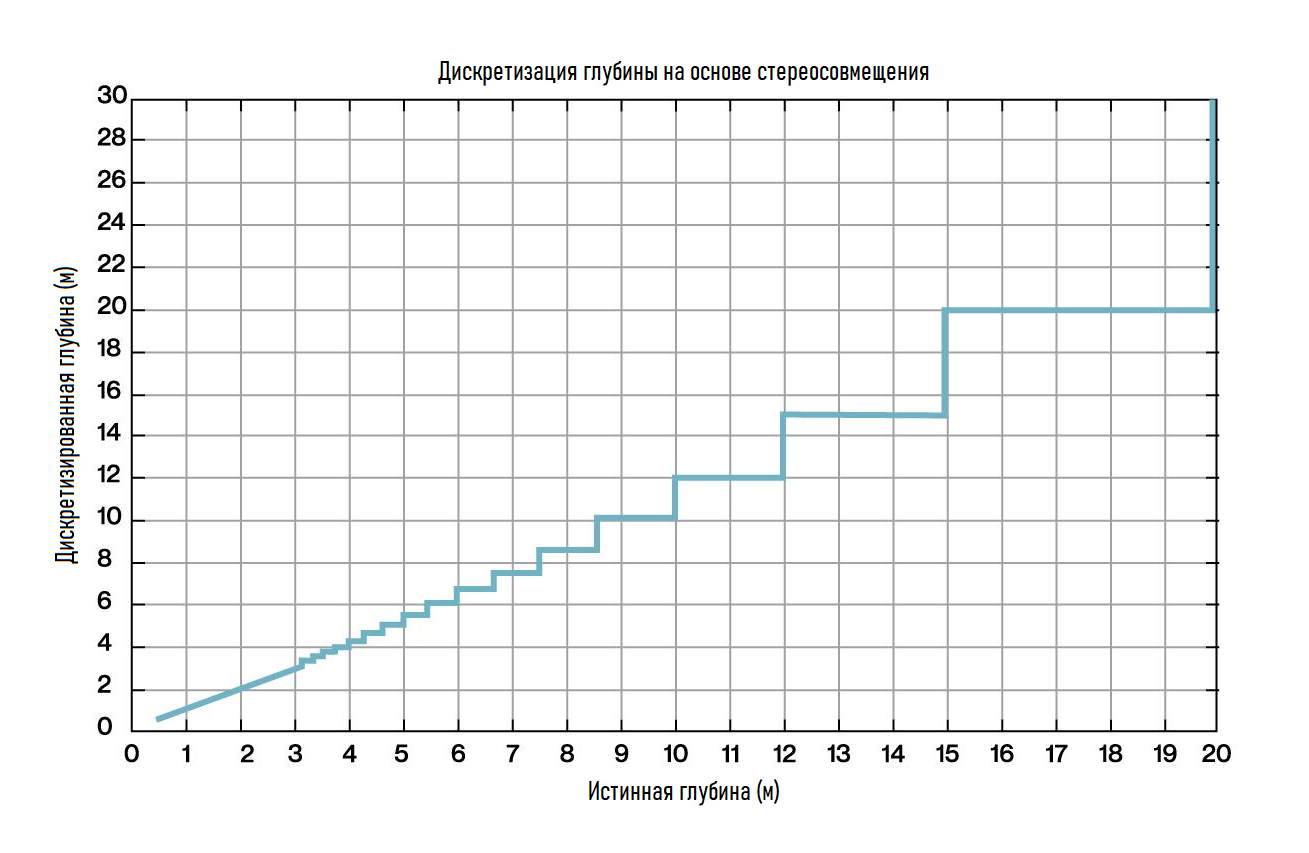 Profondeur discrétisée mesurée par « alignement stéréo » versus « profondeur réelle ».
Profondeur discrétisée mesurée par « alignement stéréo » versus « profondeur réelle ».
De plus, la disparité diverge à mesure que la profondeur approche de zéro. Comme le nombre de pixels dans les images est limité, la valeur de disparité est également limitée. En conséquence, il existe une profondeur minimale à laquelle le système perceptif est aveugle. Cette profondeur minimale est de 36 cm pour ANAFI Ai.
À propos de l'étalonnage: Chaque paire de caméras stéréo est étalonnée en usine pour mesurer avec précision les petits écarts qui peuvent exister entre les deux caméras et les compenser dans les calculs de profondeur intégrés.
L'utilisateur peut également recalibrer une paire de caméras stéréo à l'aide de la mire fournie avec le drone. En particulier, dans une certaine mesure, le drone est capable de détecter d'éventuelles erreurs d'étalonnage pouvant survenir au cours de sa vie. Dans ce cas, le logiciel de l'avion essaiera de les ajuster et de les compenser, et si cela échoue, une notification apparaîtra vous demandant de recalibrer.
Profondeur du mouvement
Le mouvement du drone peut également être utilisé pour collecter des images de l'environnement sous différents angles et ainsi reconstruire des informations de profondeur. Cette technique est appelée profondeur du mouvement, ou détection monoculaire, car une seule caméra mobile est suffisante pour collecter des informations sur la profondeur.
Le principe de fonctionnement est similaire à la vision stéréo, mais au lieu de comparer des images de l'environnement obtenues par différents observateurs en même temps, la perception compare des images de l'environnement obtenues par le même observateur à des moments différents. Si le drone se déplace, les images de cet observateur unique seront capturées sous différents angles. Connaissant la position dans laquelle chaque image a été prise, il est possible de trianguler des points correspondant à un même élément dans différentes images et de les renvoyer en 3D.
La sortie est un nuage de points tridimensionnel contenant jusqu'à 500 points pour ANAFI Ai, généré à une fréquence de 10 Hz.
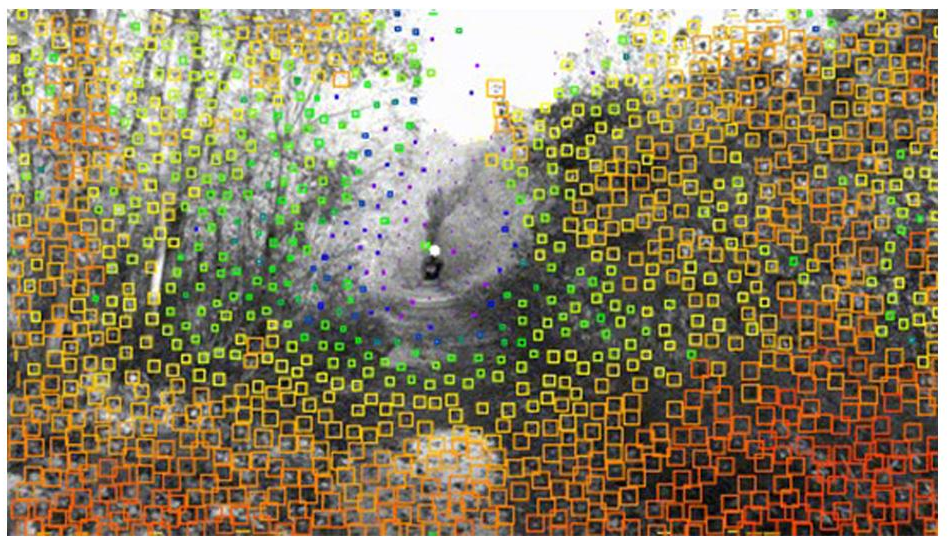 Un exemple de nuage de points créé en fonction de la profondeur du mouvement - la carte des couleurs va du rouge (Plus proche) au violet (Plus loin).
Un exemple de nuage de points créé en fonction de la profondeur du mouvement - la carte des couleurs va du rouge (Plus proche) au violet (Plus loin).
L'algorithme ANAFI Ai Motion Depth génère généralement moins d'informations (nuage de points épars) que l'algorithme de correspondance stéréo et nécessite que le drone se déplace pour collecter des informations. De plus, cet algorithme ne peut pas extraire d'informations dans la direction exacte du mouvement (au moins pour les diffusions en direct), car les objets dans les images apparaissent presque immobiles dans cette direction (foyer d'expansion).
Cependant, il a une meilleure plage de détection (plage théoriquement infinie) que l'adaptation stéréo.
Grille de remplissage
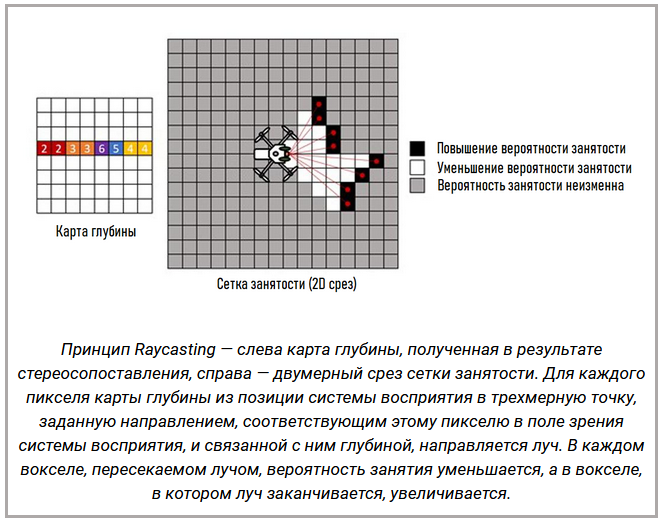
Les informations de profondeur des algorithmes de détection stéréo et monoculaire sont intégrées dans la grille de remplissage. Ce maillage échantillonne l'environnement 3D en cubes 3D appelés voxels. A chaque voxel est attribuée la probabilité d'être occupé par un obstacle ou, au contraire, d'être libre d'obstacle.
Un algorithme de transmission de rayons est utilisé pour intégrer les informations de profondeur dans une grille de remplissage. Pour chaque pixel de la carte de profondeur obtenue à la suite d'une comparaison stéréo, il est converti en un point tridimensionnel, et pour chaque point du nuage de points - en la profondeur obtenue à la suite d'un mouvement:
- Un rayon est tracé dans la grille de remplissage de la position du système de perception à la position du point 3D.
- La probabilité qu'un voxel contenant un point 3D soit occupé est augmentée.
- La probabilité que tous les voxels traversés par un rayon autre que celui contenant le point 3D soient occupés est réduite.
Ainsi, la grille agit comme un filtre temporel pour les informations de profondeur, absorbant tout bruit potentiel dans la mesure de profondeur, et comme une mémoire des mesures précédentes, ce qui permet vous permettre de naviguer dans des environnements difficiles même en l'absence d'un champ de vision continu à 360° du système de perception.
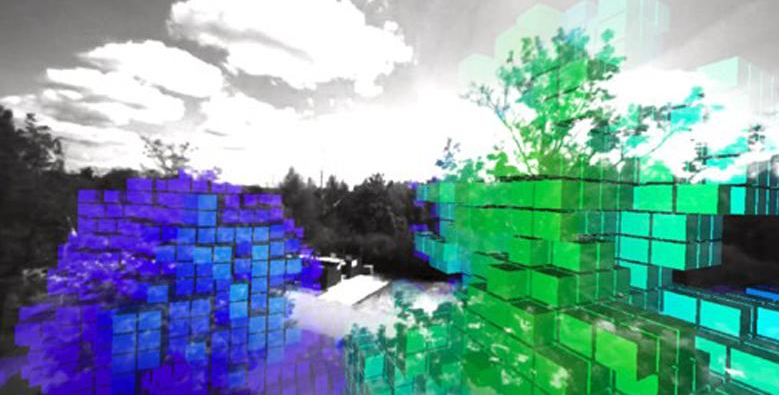 Un exemple de grille de remplissage. Les voxels sont superposés sur la vue de la caméra stéréo droite avec un degré élevé de certitude qu'ils sont occupés, allant du rouge (Proche) au violet (Loin).
Un exemple de grille de remplissage. Les voxels sont superposés sur la vue de la caméra stéréo droite avec un degré élevé de certitude qu'ils sont occupés, allant du rouge (Proche) au violet (Loin).
La grille de remplissage est la base des algorithmes de planification de mouvement utilisés par ANAFI Ai pour le vol autonome et l'évitement d'obstacles.
Évitement d'obstacles
Grâce à la connaissance de l'environnement 3D du drone stocké dans la grille de remplissage, ANAFI Ai peut éviter les obstacles. Cela apporte une sécurité supplémentaire non négligeable pour les missions autonomes, mais est également utile pour le vol manuel, surtout si la ligne de mire entre le pilote et le drone est altérée.
Toutes les 30 ms ANAFI Ai prédit quel sera l'horizon temporel court nominal dans le futur. Cette prédiction est déduite des liens soumis par l'utilisateur, qu'il s'agisse de commandes de vol de la télécommande, de waypoints à rattacher à un plan de vol, ou d'une trajectoire de saisie. Ensuite, en utilisant le modèle de drone interne simulé, l'algorithme de reprogrammation calcule les plus petites corrections possibles à cette trajectoire nominale prédite qui la rendent sans collision et réalisable pour le drone.
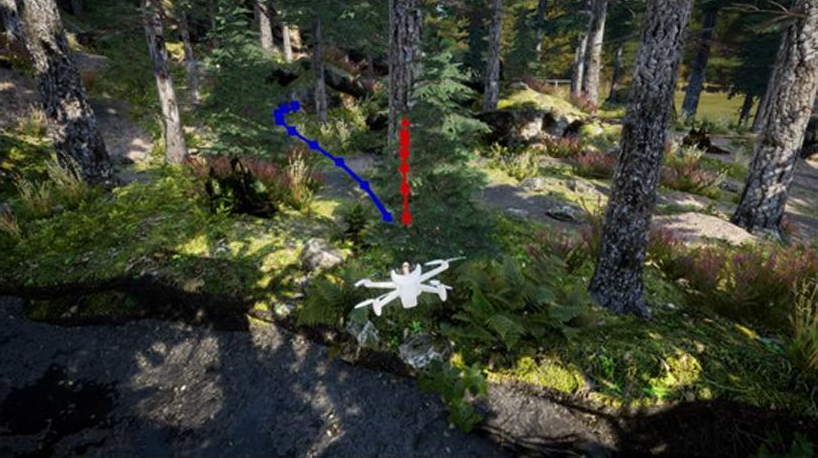 Un exemple de trajectoire ajustée calculée par l'algorithme d'évitement d'obstacles en réponse à une collision de la trajectoire de référence avec un arbre.
Un exemple de trajectoire ajustée calculée par l'algorithme d'évitement d'obstacles en réponse à une collision de la trajectoire de référence avec un arbre.
Le système d'évitement d'obstacles ANAFI Ai a été conçu pour fonctionner à des vitesses allant jusqu'à:
- Vol en palier: 29 km/h
- Montée: 14 km / h
- Descente: 11 km/h
Les performances d'évitement sont limitées en cas de pluie ou de vent fort, de faible luminosité ou de navigation par satellite perturbée. De plus, avant de voler, vous devez vous assurer que les lentilles du système de détection sont propres.
Missions de vol

Principales caractéristiques
Air SDK (voir.section SDK) permet aux développeurs d'accéder à chaque capteur de drone, caméra, interface de connectivité et fonction autonome. Par conséquent, ils peuvent personnaliser le comportement du drone pour créer des missions de vol. Chaque mission de vol contient un ensemble de comportements ou modes de base:
- Au sol: Comportement lorsque les moteurs sont à l'arrêt, ex: calibration des capteurs.
- Décollage: diverses stratégies de décollage
- Hover: point fixe
- Vol: fonctions manuelles et vol autonome
- Atterrissage: diverses stratégies d'atterrissage
- Critique: lors de la détection d'un état critique
Les missions de vol personnalisées peuvent créer de nouveaux comportements ou les réutiliser à partir de la mission par défaut.
Prix et disponibilité
Le démarrage des ventes du drone ANAFI Ai est prévu pour septembre 2021. Les informations sur les prix n'ont pas été divulguées pour le moment. Nous continuons de surveiller les informations entrantes et mettrons certainement à jour cette section à une date ultérieure.

Télécharger la documentation
Documentation développeur:
- Télécharger la documentation technique complète à partir du développeur
- Téléchargez la spécification du produit du développeur
Vidéos
Meilleures critiques ANAFI Ai de le développeur et les utilisateurs
Déballage et premier vol.
Vol d'essai du drone à distance avec connexion 4G. Le temps de vol total était de 29 minutes à une vitesse de vol horizontale moyenne de 58 km/h (16 m/s). Pendant ce temps, le drone a pu couvrir 27 km. Vous pouvez également remarquer que le vol a été effectué dans des conditions de vent fort, ce qui a été constamment averti par le système de drone.
.






